
海洋情報収集システム
【課題】容易にブイを浮沈させることができるとともに海中待機させることができる、海洋情報収集システムを提供する。
【解決手段】海底に配置されるアンカー1と、アンカー1に接続され海中に浮遊する中間ブイ2と、中間ブイ2に一端が接続された係留索3と、係留索3の他端に接続された観測用ブイ4と、を有し、観測用ブイ4は、海流の進行方向に長手方向が配置される本体部41と、本体部41に配置され膨縮可能な浮袋を備えた比重調整部42と、本体部41に配置されデータ転送を行うアンテナ43と、本体部41に配置され所定の海洋情報を取得する観測部44と、を有し、比重調整部42の浮袋を膨張させることによって観測用ブイ4を浮上させ、比重調整部42の浮袋を収縮させることによって観測用ブイ4を降下させ海中に待機させるようにしたものである。
【解決手段】海底に配置されるアンカー1と、アンカー1に接続され海中に浮遊する中間ブイ2と、中間ブイ2に一端が接続された係留索3と、係留索3の他端に接続された観測用ブイ4と、を有し、観測用ブイ4は、海流の進行方向に長手方向が配置される本体部41と、本体部41に配置され膨縮可能な浮袋を備えた比重調整部42と、本体部41に配置されデータ転送を行うアンテナ43と、本体部41に配置され所定の海洋情報を取得する観測部44と、を有し、比重調整部42の浮袋を膨張させることによって観測用ブイ4を浮上させ、比重調整部42の浮袋を収縮させることによって観測用ブイ4を降下させ海中に待機させるようにしたものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、海洋情報収集システムに関し、特に、定点観測に適した海洋情報収集システムに関する。
【背景技術】
【0002】
海洋は、地球表面の約7割を占めており、その熱容量は大気の約1000倍といわれている。したがって、海水の温度が大きく変化した場合には、大気の状態に大きな影響を及ぼし、世界各地の天候や気候に大きな変化をもたらすこととなる(例えば、エルニーニョ現象等)。そこで、海水温度を含む海洋の内部情報を収集して海洋情報の変動を把握することによって、地上への種々の影響を予測したり予防したりすることができる。かかる海洋情報を収集するシステムとして、既にいくつかの提案がなされている(例えば、特許文献1及び特許文献2参照)。
【0003】
特許文献1には、定期的に沈降と浮上を繰り返す移動体によって海洋情報を収集するシステムが開示されている。かかるシステムでは、移動体の浮上中に所定の観測を実施し、海面到達時に観測データを外部に伝送するように構成されている。また、移動体は、可変バラストレシーバを有し、この可変バラストレシーバにバラストオイルを注排水することにより、可変バラストレシーバの体積を膨張又は収縮させ、移動体の海中に占める体積を変化させて移動体の比重を調整している。このように可変バラストレシーバの体積を変化させて移動体の比重を調整することにより、移動体を所望の速度で浮上又は沈降させることができる。特許文献1に記載された海洋情報収集システムは、移動体が海底に係留されていないことから漂流観測式ということができる。
【0004】
特許文献2には、海洋情報を収集する長期観測ステーションを深海深度に配置し、収集された観測データを定期的に沈降と浮上を繰り返すデータ伝送用ブイにより陸上基地に伝送することによって海洋情報を収集するシステムが開示されている。かかるシステムでは、データ伝送用ブイは中継基地又は長期観測ステーションに配置されたウインチ駆動装置により浮沈可能に構成されている。特許文献2に記載された海洋情報収集システムは、長期観測ステーションが海底に係留されていることから定点観測式ということができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第2739534号公報
【特許文献2】特開平6−133371号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載されたような漂流観測式の海洋情報収集システムでは、移動体の移動は海流の流れに委ねられることから、必ずしも必要な箇所のデータを取得することができるとは限らない。したがって、必要な箇所の海洋情報を定期的に取得するためには、移動体の個数を増加せざるを得ない。現在、地球上には3000個以上の漂流観測式の移動体が海洋に漂っている。これらの移動体は、基本的に使い捨てであり、最終的に漂流ゴミとなる。使用済みの移動体を回収することも不可能ではないが、その労力は多大なものとなる。
【0007】
特許文献2に記載されたような定点観測式の海洋情報収集システムでは、設置箇所が特定されていることから、ブイの回収や交換を容易に行うことができ、漂流ゴミの低減を図ることができる。しかしながら、定点観測式の海洋情報収集システムにおいて、ブイを常時浮上させた場合には、海洋交通や漁業活動の妨げになる、貝類等の生物が付着してしまう等の問題があり、その対策の一つとして、ブイを浮沈させる方法がある。そして、ブイを浮沈させる駆動手段は、海洋中に浸水させる必要があることから、機構が複雑になってしまう、高価になってしまう、故障が多い等の問題を生じていた。また、長期観測ステーションを深海深度に設置する定点観測では、大気に影響を与えやすい浅海深度の海洋情報や深度に応じた海洋情報を取得し難いという問題もあった。
【0008】
本発明は、上述した問題点に鑑み創案されたものであり、容易にブイを浮沈させることができるとともに海中待機させることができる、海洋情報収集システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明によれば、海底に配置されるアンカーと、該アンカーに接続され海中に浮遊する中間ブイと、該中間ブイに一端が接続された係留索と、該係留索の他端に接続された観測用ブイと、を有し、前記観測用ブイは、海流の進行方向に長手方向が配置される本体部と、該本体部に配置され膨縮可能な浮袋を備えた比重調整部と、前記本体部に配置されデータ転送を行うアンテナと、前記本体部に配置され所定の海洋情報を取得する観測部と、を有し、前記比重調整部の前記浮袋を膨張させることによって前記観測用ブイを浮上させ、前記比重調整部の前記浮袋を収縮させることによって前記観測用ブイを降下させ海中に待機させるようにした、ことを特徴とする海洋情報収集システムが提供される。
【0010】
前記係留索は、前記観測用ブイの全長の中央部よりも前方かつ先端部よりも後方の位置に接続されていてもよい。
【0011】
前記観測用ブイは、前記本体部の先端側に前記比重調整部が配置され、前記本体部の後端側に前記アンテナ及び前記観測部が配置されていてもよい。
【0012】
前記中間ブイは、前記観測用ブイの海中待機位置と同レベルの深度に浮遊するように構成されていてもよい。
【0013】
前記係留索に配置された揚力発生手段を有し、該揚力発生手段により前記観測用ブイの浮上又は降下を補助するようにしてもよい。
【0014】
前記揚力発生手段は、開閉可能な翼部材を有する海中で浮遊可能なフロートであってもよいし、前記係留索に挿通され拡幅されたフランジ部を有するスリーブであってもよい。
【発明の効果】
【0015】
上述した本発明の海洋情報収集システムによれば、係留索を巻き取ることなく観測用ブイを海中に待機させることができ、浮袋を膨縮させるだけで容易に観測用ブイを浮沈させることができる。また、中間ブイを介して観測用ブイをアンカーに接続したことにより、定点観測することができ、観測用ブイの回収や交換を容易に行うことができ、漂流ゴミの増加を抑制することができる。さらに、浮沈可能な観測用ブイにより海洋情報を収集するようにしたことから、大気に影響を与えやすい浅海深度の海洋情報や深度に応じた多点観測による海洋情報を容易に収集することができる。
【0016】
また、係留索に揚力発生手段を配置することにより、海流によって生じる観測用ブイの浮上を妨げる係留索の張力を低減することができ、観測用ブイの浮上を円滑に行うことができる。
【図面の簡単な説明】
【0017】
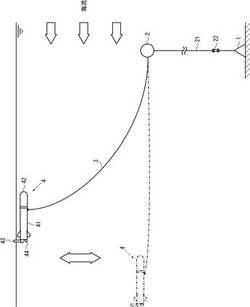
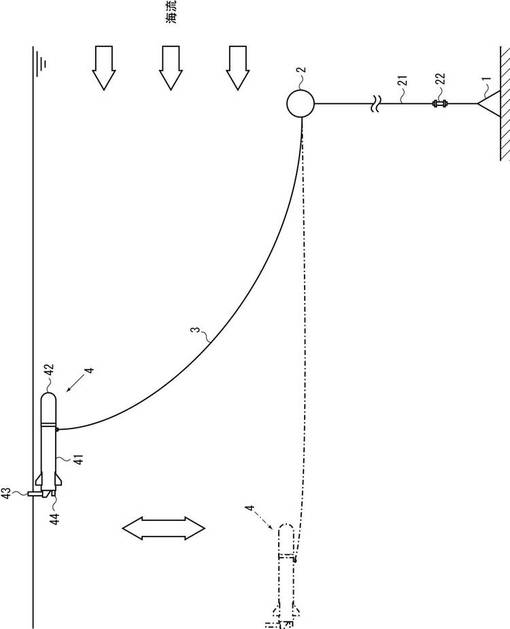
【図1】本発明の第一実施形態に係る海洋情報収集システムを示す全体構成図である。
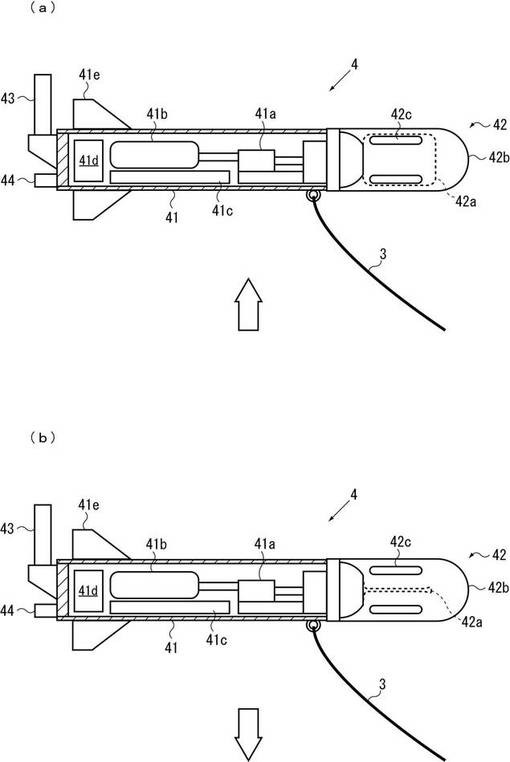
【図2】図1に示した観測用ブイの詳細図であり、(a)は浮上時、(b)は降下時、を示している。
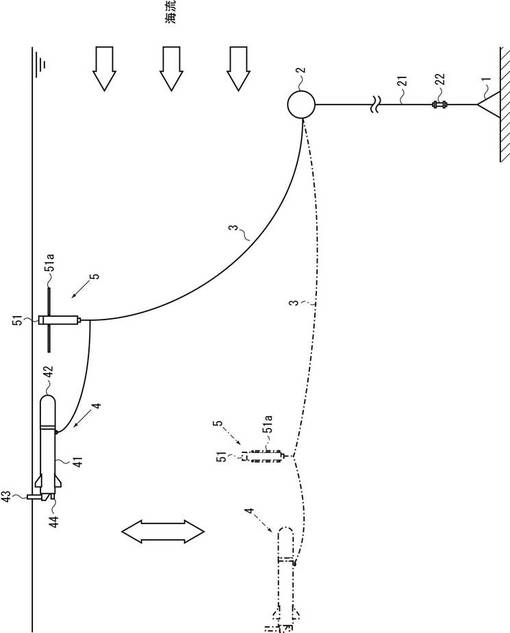
【図3】本発明の第二実施形態に係る海洋情報収集システムを示す全体構成図である。
【図4】図3に示した揚力発生手段の詳細図であり、(a)は降下時、(b)は浮上時、を示している。
【図5】本発明の第三実施形態に係る海洋情報収集システムを示す全体構成図である。
【図6】図5に示した揚力発生手段の詳細図であり、(a)は第一例、(b)は第二例、を示している。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態について図1〜図6を用いて説明する。ここで、図1は、本発明の第一実施形態に係る海洋情報収集システムを示す全体構成図である。図2は、図1に示した観測用ブイの詳細図であり、(a)は浮上時、(b)は降下時、を示している。
【0019】
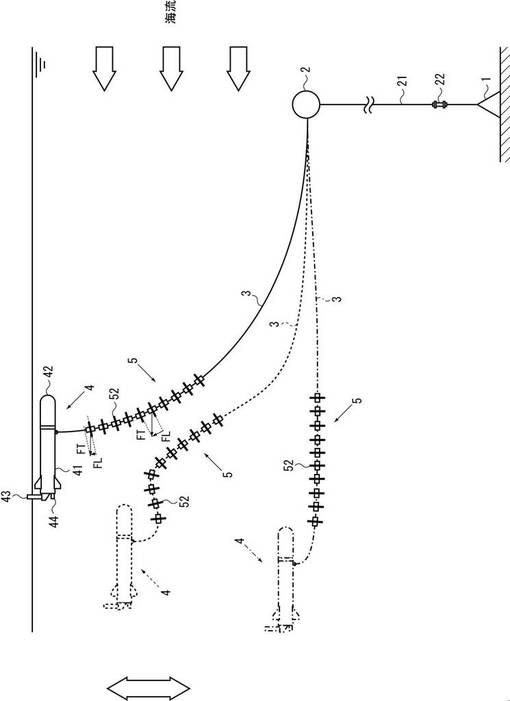
本発明の第一実施形態に係る海洋情報収集システムは、図1及び図2に示したように、海底に配置されるアンカー1と、アンカー1に接続され海中に浮遊する中間ブイ2と、中間ブイ2に一端が接続された係留索3と、係留索3の他端に接続された観測用ブイ4と、を有し、観測用ブイ4は、海流の進行方向に長手方向が配置される本体部41と、本体部41に配置され膨縮可能な浮袋42aを備えた比重調整部42と、本体部41に配置されデータ転送を行うアンテナ43と、本体部41に配置され所定の海洋情報を取得する観測部44と、を有し、比重調整部42の浮袋42aを膨張させることによって観測用ブイ4を浮上させ、比重調整部42の浮袋42aを収縮させることによって観測用ブイ4を降下させ海中に待機させるようにしたものである。
【0020】
前記アンカー1は、観測用ブイ4を海底に繋ぎ留めておくための部品である。アンカー1は、例えば、海流によって移動しない重量を有する載置式の錘であってもよいし、杭等によって海底に固定されるものであってもよい。アンカー1は、海洋情報を取得したいエリア内の海底に配置される。
【0021】
前記中間ブイ2は、観測用ブイ4の浮沈の起点を構成する部品である。中間ブイ2は、係留索21によりアンカー1と接続されており、係留索21の中間部には水中切離装置22が配置されている。水中切離装置22により、中間ブイ2の設置及び回収を容易に行うことができる。中間ブイ2は、アンカー1に対して略鉛直上の位置に浮遊可能な浮力を有する。
【0022】
また、中間ブイ2は、観測用ブイ4の海中待機位置と同レベルの深度に浮遊するように構成してもよい。例えば、アンカー1を配置する水深が約2000mであって、観測用ブイ4の海中待機位置の深度が約1000mである場合には、中間ブイ2の浮遊深度は約1000mに設定される。このように中間ブイ2の浮遊深度を観測用ブイ4の海中待機位置と同レベルに設定することにより、観測用ブイ4の待機時に係留索3が海流に対して略平行となり、待機中の観測用ブイ4に対する係留索3の張力の発生を抑制することができ、観測用ブイ4の待機位置及び姿勢を安定させることができる。なお、「同レベル」とは、実質的に同じ深度を意味し、±100m程度の誤差を含む趣旨である。
【0023】
ところで、観測用ブイ4の浮上又は浮遊中に、氷山や漂流物等の物体が流れてくることがある。この場合、観測用ブイ4の故障や破損を抑制するために、観測用ブイ4を一時的に沈降させて、これらの物体を避けるようにした方がよい。このとき、観測用ブイ4は回避位置で一時的に留まることになるが、この位置は海中待機位置と異なる位置、すなわち、中間ブイ2の浮遊深度よりも浅い深度であってもよい。
【0024】
前記係留索3は、中間ブイ2と観測用ブイ4とを接続する部品である。係留索3の長さは、観測用ブイ4の海中待機位置の深度、観測用ブイ4が配置される海流の速度、係留索3の海流に対する抵抗の大きさ等の条件により、観測用ブイ4が浮上して海面に到達することができるように設定される。また、係留索3は、できるだけ少ない本数(例えば、一本)で支持可能かつ浮沈可能とするために、例えば、直径5mm以下の細い強化プラスチック素材により構成し、比重を海水の比重と同程度となるように調整してもよい。また、係留索3は、観測用ブイ4の全長の中央部よりも前方かつ先端部よりも後方の位置に接続される。かかる位置に係留索3を接続することにより、観測用ブイ4を海流の進行方向に対して略平行となるように支持し易くすることができる。具体的には、係留索3は、例えば、本体部41の先端部に接続される。
【0025】
前記観測用ブイ4は、海洋情報を取得したいエリア内で浮沈し所定の海洋情報を取得する部品である。本体部41は、密閉空間を形成する円筒形状の容器であり、内部空間には、浮袋42aに作動液(例えば、シリコンオイル)を注排液するオイルポンプ41a、作動液を貯蔵するオイルタンク41b、電子機器に電力を供給する電池パック41c、アンテナ43や観測部44等の制御を行う制御部41d等が配置されている。本体部41は、海流に対して略平行な姿勢(例えば、迎角が0〜45°の範囲)を維持できるように細長い形状を有し、長手方向が海流の進行方向に沿って配置される。このように観測用ブイ4の長手方向を海流の進行方向に配置することにより、観測用ブイ4の海流を受ける受圧面積を低減することができる。また、本体部41の後端部には、海流中における観測用ブイ4の姿勢を保持する安定翼41eを配置するようにしてもよい。
【0026】
また、観測用ブイ4は、本体部41の先端側に比重調整部42が配置され、本体部41の後端側にアンテナ43及び観測部44が配置されている。観測用ブイ4は、係留索3に接続されているとともに、海流により押し流されているため、一般に下流側の方が上流側よりも浮き上がり易い性質を有する。そこで、海面上に露出させたいアンテナ43を本体部41の後端部に配置し、観測用ブイ4の浮沈を促す比重調整部42を本体部41の先端部に配置している。同様の理由により、オイルタンク41bも本体部41の後端部寄りに配置されている。また、配線等を容易にするために、アンテナ43と近接する位置に観測部44及び制御部41dを集約して配置している。
【0027】
比重調整部42は、膨縮可能な浮袋42aと、浮袋42aの外周を覆うカバー42bと、本体部41内に配置されるオイルポンプ41aと、により構成される。浮袋42aは、海水に対して耐性を有する柔らかい素材(例えば、樹脂等)により構成される。カバー42bは、浮袋42aの破損を抑制する部品であり、外周面に複数の開口部42cが形成されている。したがって、カバー42b内は海水で満たされた状態になっている。
【0028】
浮袋42aにオイルポンプ41aを作動させて作動液を注液すると、図2(a)に示したように、浮袋42aはカバー42b内で膨張し、カバー42b内の海水が開口部42cから海中に押し出される。その結果、観測用ブイ4の見かけ上の体積が増大し、観測用ブイ4の比重が低下し、浮力が増大する。したがって、観測用ブイ4を浮上させることができる。
【0029】
オイルポンプ41aを作動させて浮袋42aから作動液を排液すると、図2(b)に示したように、浮袋42aはカバー42b内で収縮し、開口部42cからカバー42b内に海水が流入する。その結果、観測用ブイ4の見かけ上の体積が減少し、観測用ブイ4の比重が上昇し、浮力が低下する。したがって、観測用ブイ4を降下させることができる。なお、オイルポンプ41aの作動は、例えば、制御部41dによって処理される。
【0030】
アンテナ43は、観測部44により取得した海洋情報データを地上基地局や観測船等の主装置にデータ伝送する部品である。アンテナ43は、主装置のアンテナと直接的に交信してもよいし、通信衛星を介して主装置と交信するようにしてもよい。
【0031】
観測部44は、所定の海洋情報を収集する部品である。観測部44は、例えば、塩分濃度等の基礎情報を取得するCTDセンサ(電気伝導度:Conductivity、温度:Temperature、深度:Depthを計測するセンサ)、海水のサンプリング採集を行う採水装置の他、圧力センサ、磁気センサ、放射線測定器、ソナー等、種々の計測・観測用のセンサや装置により構成される。これらのセンサ及び装置は、定点観測を行うエリアで取得したい海洋情報に応じて適宜選択される。観測部44により取得された海洋情報は、制御部41dに配置された記憶部(メモリ)に保存される。なお、記憶部(メモリ)には、観測部44の各センサ等の操作スケジュールや観測用ブイ4の浮沈スケジュール等が保存されており、これらのスケジュールに従って制御部41dが計測や浮沈に必要な所定の操作を行う。
【0032】
観測部44は、例えば、観測用ブイ4の浮上時にデータを取得するようにしてもよいし、海中待機時にデータを取得するようにしてもよい。また、観測部44により取得した海洋情報データは、観測用ブイ4が海面に浮上した時にアンテナ43から定期的にデータ伝送するようにしてもよいし、観測用ブイ4を回収するまで継続的にデータを記憶部(メモリ)に保存するようにしておいてもよい。なお、観測部44の配置は、本体部41の後端部に限定されるものではなく、配置するセンサや装置の種類や大きさによって任意に設定することができ、例えば、本体部41の側面部や下面部であってもよい。
【0033】
次に、上述した第一実施形態に係る海洋情報収集システムの作用について説明する。図1に示したように、アンカー1は海洋情報を取得したいエリア内の海底に配置されている。具体的には、観測用ブイ4はアンカー1よりも海流の下流側に位置することから、アンカー1の配置位置は、海洋情報を取得したいエリアに観測用ブイ4が配置されるように、海流の速度や変動等を考慮して設定される。なお、アンカー1の水深は、一般的に数百〜数千mである。
【0034】
観測用ブイ4は、図示したように、中間ブイ2を起点に浮沈する。ここで、浮上した状態を実線、降下した状態を一点鎖線で表示している。浮袋42aを膨張させることによって観測用ブイ4の比重を低下させて観測用ブイ4を浮上させる。観測用ブイ4は、最終的に海面に到達し、アンテナ43が海面から露出される。観測部44のCTDセンサにより計測された深度により、観測用ブイ4が海面に到達したか否かを把握することができ、観測用ブイ4が海面に到達した後、アンテナ43から必要な海洋情報のデータ伝送を行う。
【0035】
データ伝送が終了した後、観測用ブイ4は海中待機位置に戻される。具体的には、浮袋42aを収縮させることによって観測用ブイ4の比重を上昇させて観測用ブイ4を降下させる。観測用ブイ4は、最終的に海中待機位置に到達する。このとき、中間ブイ2と海中待機位置の深度は同レベルに設定されていることから、係留索3は海流の進行方向に対して平行に近い状態で海中に展開される。したがって、係留索3の海流を受ける受圧面積を低減することができ、係留索3に発生する張力を低減することができ、観測用ブイ4の待機状態を安定させることができる。なお、観測用ブイ4の海中待機深度は、例えば、数十m〜1000m程度である。
【0036】
この観測用ブイ4の浮沈スケジュールは、定点観測を行う場所、取得する海洋情報の種類等によって任意に設定することができ、数日ごとであってもよいし、数時間ごとであってもよいし、数十分ごとであってもよい。また、全てのデータをデータ伝送する必要はなく、データ伝送しない海洋情報データは観測用ブイ4を回収した後、データを回収するようにしてもよい。地上基地局や観測船等に収集された海洋情報は、所定の処理により画面表示されたり、分析されたりする。
【0037】
上述した実施形態に係る海洋情報収集システムによれば、係留索3を巻き取ることなく観測用ブイ4を海中に待機させることができ、浮袋42aを膨縮させるだけで容易に観測用ブイ4を浮沈させることができる。また、中間ブイ2を介して観測用ブイ4をアンカー1に接続したことにより、容易に定点観測することができ、観測用ブイ4の回収や交換を容易に行うことができ、漂流ゴミの増加を抑制することができる。さらに、浮沈可能な観測用ブイ4により海洋情報を収集するようにしたことから、大気に影響を与えやすい浅海深度の海洋情報や深度に応じた多点観測による海洋情報を容易に収集することができる。
【0038】
続いて、本発明の第二実施形態に係る海洋情報収集システムについて説明する。ここで、図3は、本発明の第二実施形態に係る海洋情報収集システムを示す全体構成図である。図4は、図3に示した揚力発生手段の詳細図であり、(a)は降下時、(b)は浮上時、を示している。なお、上述した第一実施形態と同じ構成部品については、同じ符号を付して重複した説明を省略する。
【0039】
図3に示した第二実施形態に係る海洋情報収集システムは、係留索3に配置された揚力発生手段5を有し、揚力発生手段5により観測用ブイ4の浮上又は降下を補助するようにしたものである。係留索3は、一般に、海流の影響を受けて下流側に押し流され、観測用ブイ4が浮上しようとする場合に、それを妨げるような張力を発生する。したがって、海流の速度が速い場合には、観測用ブイ4が海面まで到達するのに時間を要したり、海面まで到達できなかったりしてしまうことが予想される。そして、係留索3の張力(抵抗)を観測用ブイ4の浮力で調整しようとすれば、浮袋42aが大きくなってしまい、作動液の分量が増加して本体部41の重量が増加し、観測用ブイ4が大型化してしまうこととなる。そこで、本実施形態では、係留索3に少なくとも係留索3の浮上を補助する揚力発生手段5を配置している。
【0040】
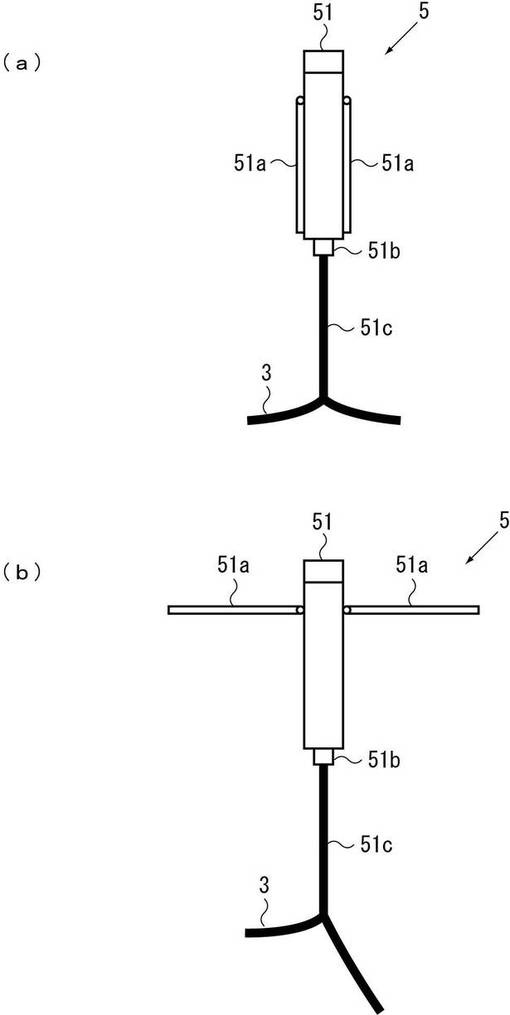
図4に示したように、揚力発生手段5は、例えば、開閉可能な翼部材51aを有する海中で浮遊可能なフロート51により構成される。図4(a)に示したように、観測用ブイ4が海中待機状態の場合には、フロート51は翼部材51aを閉じた状態になっており、海中に浮遊している。フロート51が浮遊状態を維持できないほど重たい場合には、海中待機状態において、フロート51が係留索3よりも沈んでしまうことによって、係留索3を撓ませてしまい、海流の影響を受けて観測用ブイ4を降下させようとしてしまうことから、海中待機状態を安定させることができない。そこで、フロート51は、翼部材51aを閉じた状態で、係留索3を大きく撓ませない程度に浮遊した状態を維持できる浮力を有するように構成される。また、浮力が大き過ぎる場合も、係留索3を部分的に持ち上げてしまうことから、例えば、フロート51の比重を係留索3の比重よりも若干軽くするようにしてもよい。これらの点を考慮すれば、フロート51は、例えば、中性浮量又はそれよりも若干軽くなるように構成される。かかる構成により、フロート51は、係留索3よりも常に上方に位置することから、係留索3の絡まりを抑制することができる。
【0041】
フロート51の本体は、海中待機状態で抵抗を少なくするために、例えば、略円柱形状に構成される。また、フロート51の海中における姿勢を保持するために、断面形状を流線型に構成したり、外周面にフィン(整流板)を配置したりするようにしてもよい。フロート51の下部には接続金具51bが配置されており、接続金具51bには係留索3から分岐された分岐索51cが接続されている。接続金具51bは、例えば、分岐索51cが自由に動けるようにスイベルジョイントにより構成される。なお、ここでは、フロート51を一つだけ配置した場合を図示したが、海流速度や待機深度に応じて複数のフロート51を係留索3に配置するようにしてもよい。
【0042】
図4(b)に示したように、観測用ブイ4の浮上時には、翼部材51aを開き、海流を受ける受圧面積を増加させて揚力を発生させる。翼部材51aは、受圧面積を増加させるような曲面形状を有していてもよい。フロート51の本体内には、翼部材51aの開閉駆動装置(図示せず)が内蔵されている。開閉駆動装置は、海中待機状態の深度における水圧に対抗して翼部材51aを広げることができる出力を有していれば、どのような機構であってもよく、例えば、回転運動を行う電動モータであってもよいし、電動モータと歯車機構の組み合わせであってもよいし、往復運動を行うアクチュエータであってもよいし、アクチュエータとカム機構の組み合わせであってもよい。
【0043】
開閉駆動装置への電力は、フロート51の本体内に搭載されたバッテリーから供給してもよいし、観測用ブイ4に搭載された電池パック41cから供給するようにしてもよい。なお、観測用ブイ4から電力供給する場合には、係留索3及び分岐索51cを電力ケーブルで構成したり、係留索3及び分岐索51cに電力ケーブルを付設したりしておく必要がある。また、翼部材51aの開閉スケジュール制御は、フロート51の本体内に搭載された制御装置により処理してもよいし、観測用ブイ4に搭載された制御部41dにより処理するようにしてもよいし、超音波等の電波を送受信する機構を配置して外部から制御信号を送信するようにしてもよい。また、海流速度や浮上中の深度等の条件に応じて、翼部材51aの開閉角度や迎角を制御するようにしてもよい。
【0044】
ここで、上述した第二実施形態に係る海洋情報収集システムの作用について説明する。なお、図3において、観測用ブイ4が浮上した状態を実線、降下した状態を一点鎖線で表示している。
【0045】
観測用ブイ4の海中待機状態において、翼部材51aは閉じており、フロート51は観測用ブイ4と略同じ深度を維持した状態で海中に浮遊している。そして、観測用ブイ4を浮上させる場合には、浮袋42aに作動液を注入するとともに、フロート51の翼部材51aを開いて揚力を発生させる。これらの動作は、観測用ブイ4の海中待機深度や浮上速度、海流速度等の条件により、同時に開始するように制御してもよいし、タイミングをずらして作動させるように制御してもよい。
【0046】
翼部材51aを広げたフロート51は、翼部材51aにより海流を受けて揚力を発生し、係留索3を持ち上げる。フロート51の揚力を観測用ブイ4の浮力よりも大きくすることにより、観測用ブイ4の浮上を先導するようにフロート51が浮上し、係留索3が観測用ブイ4を下方に引っ張る張力の発生を抑制することができる。なお、フロート51の揚力は、観測用ブイ4の浮力と同じ程度か少し低い程度であっても、フロート51の浮上によって係留索3を観測用ブイ4の浮上に合わせて持ち上げることができ、係留索3が観測用ブイ4を下方に引っ張る張力の発生を抑制することができる。フロート51は、海面から露出した場合には波力により破損したり揚力が安定しなかったりすることから、最終的に、海面付近に到達するように調整される。
【0047】
観測用ブイ4のデータ伝送が終了した後、観測用ブイ4は浮袋42aを収縮させて海中に降下する。このときフロート51は、翼部材51aを閉じて揚力の発生を終了し、観測用ブイ4の降下を妨げないようにする。翼部材51aを畳んだフロート51は、観測用ブイ4の降下に伴って海中に降下する。最終的に、観測用ブイ4は海中待機位置に到達して浮遊し、フロート51は係留索3よりも上方の位置で浮遊する。
【0048】
上述した第二実施形態に係る海洋情報収集システムによれば、係留索3に揚力発生手段5を配置することにより、海流によって生じる観測用ブイ4の浮上を妨げる係留索3の張力の発生を抑制することができ、観測用ブイ4の浮上を円滑に行うことができる。
【0049】
続いて、本発明の第三実施形態に係る海洋情報収集システムについて説明する。ここで、図5は、本発明の第三実施形態に係る海洋情報収集システムを示す全体構成図である。図6は、図5に示した揚力発生手段の詳細図であり、(a)は第一例、(b)は第二例、を示している。なお、上述した第一実施形態及び第二実施形態と同じ構成部品については、同じ符号を付して重複した説明を省略する。
【0050】
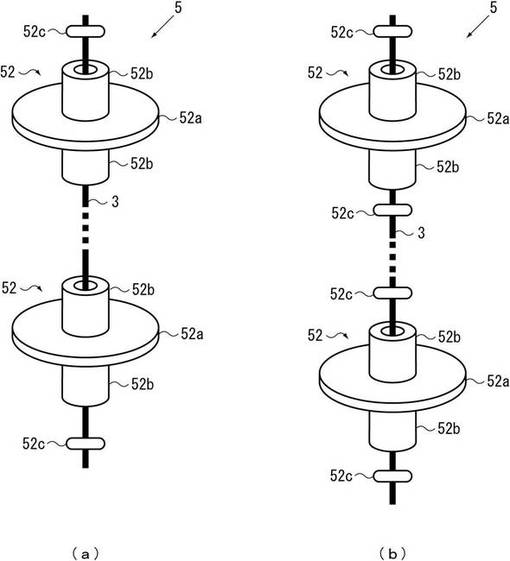
図5に示した第三実施形態に係る海洋情報収集システムは、上述した第二実施形態と同様に、揚力発生手段5を有するものである。図5及び図6に示した揚力発生手段5は、係留索3に挿通され拡幅されたフランジ部52aを有するスリーブ52により構成されている。図5に示したように、係留索3には複数のスリーブ52が挿通される。各スリーブ52は、個別に係留索3に固定されていてもよいし、係留索3に一定の範囲内で移動可能に配置されていてもよい。
【0051】
図6(a)及び(b)に示したように、スリーブ52は、例えば、係留索3に挿通される円筒部52bと、円筒部52bより拡径されたフランジ部52aと、を有する。円筒部52bは、係留索3に対するスリーブ52の姿勢を安定させるために、フランジ部52aの両側に配置される。フランジ部52aは、海流を受ける受圧面を形成する部分であり、海流速度、スリーブ52の個数等の条件により大きさが設定される。なお、フランジ部52aは、円筒部52bの全周に渡って拡径した場合を図示しているが、部分的に拡幅するように形成してもよい。
【0052】
図6(a)に示した第一例は、係留索3に配置したスリーブ52全体の上部及び下部にストッパ52cを配置したものである。かかる構成により、スリーブ52は、ストッパ52c間で自由に移動することができ、係留索3の可撓性を維持しつつ揚力を発生することができる。ストッパ52cは、例えば、金属材や樹脂材により構成され、係留索3を挟持する構成であってもよいし、係留索3に固着(接着や溶着)する構成であってもよいし、テープ状のものを巻き付ける構成であってもよい。
【0053】
図6(b)に示した第二例は、係留索3に配置した各スリーブ52の上部及び下部にそれぞれストッパ52cを配置したものである。かかる構成により、各スリーブ52は、ストッパ52c間で自由に移動することができ、スリーブ52の位置を一定の範囲内に留めながら、係留索3の可撓性を維持しつつ揚力を発生することができる。
【0054】
ここで、上述した第三実施形態に係る海洋情報収集システムの作用について説明する。なお、図5において、観測用ブイ4が浮上した状態を実線、降下した状態を一点鎖線、降下時における中間状態を破線で表示している。また、各状態において、説明の便宜上、スリーブ52のみ実線で図示している。
【0055】
観測用ブイ4の海中待機状態において、係留索3は海流の進行方向に対して略平行な状態になっていることから、スリーブ52のフランジ部52aは海流の進行方向に対して略垂直な状態になっており、揚力を発生し難い状態になっている。したがって、係留索3及び観測用ブイ4は安定した海中待機状態を維持する。
【0056】
そして、観測用ブイ4は、浮袋42aに作動液を注入して浮上を開始すると係留索3は海流の進行方向に対して傾斜した状態になり、スリーブ52のフランジ部52aも海流の進行方向に対して傾斜した状態となり、スリーブ52は海流を受けて揚力を発生し、係留索3を持ち上げる。したがって、スリーブ52により、観測用ブイ4の浮上に伴って係留索3に揚力を発生させることができ、係留索3が観測用ブイ4を下方に引っ張る張力の発生を抑制することができる。最終的に、実線で示したように、観測用ブイ4は海面に到達し、各スリーブ52は海流の進行方向の力FTにより揚力FLを発生させていることから、観測用ブイ4の海面に浮遊した状態を安定させることができる。
【0057】
観測用ブイ4のデータ伝送が終了した後、観測用ブイ4は浮袋42aを収縮させて海中に降下する。このとき、スリーブ52は揚力FLを発生させているが、観測用ブイ4の降下に伴って、図の中間状態に示したように、上方のスリーブ52から順に、海流の進行方向に対して反転するように姿勢を変えることから、スリーブ52の揚力は徐々に低下する。そして、スリーブ52が下方を向いたときには、スリーブ52は係留索3を降下させる方向に力を発生することから、スリーブ52の姿勢の変化を加速させることができ、次第に揚力が低下し、観測用ブイ4を円滑に降下させることができる。最終的に、係留索3及び観測用ブイ4は、海中待機位置に到達し浮遊する。
【0058】
上述した第三実施形態に係る海洋情報収集システムによれば、第二実施形態と同様に、係留索3に揚力発生手段5を配置することにより、海流によって生じる観測用ブイ4の浮上を妨げる係留索3の張力の発生を抑制することができ、観測用ブイ4の浮上を円滑に行うことができる。
【0059】
また、スリーブ52よりもフロート51の方が大きな揚力を発生させることができることから、例えば、親潮等のような2ノット以下の緩やかな流れの海流に対してスリーブ52を使用し、黒潮等のような2ノット以上の急な流れの海流に対してフロート51を使用するようにしてもよい。
【0060】
本発明は上述した実施形態に限定されず、揚力発生手段5としてフロート51及びスリーブ52の両方を組み合わせて使用してもよい等、本発明の趣旨を逸脱しない範囲で種々変更が可能であることは勿論である。
【符号の説明】
【0061】
1 アンカー
2 中間ブイ
3,21 係留索
4 観測用ブイ
5 揚力発生手段
41 本体部
42 比重調整部
42a 浮袋
43 アンテナ
44 観測部
51 フロート
51a 翼部材
52 スリーブ
52a フランジ部
【技術分野】
【0001】
本発明は、海洋情報収集システムに関し、特に、定点観測に適した海洋情報収集システムに関する。
【背景技術】
【0002】
海洋は、地球表面の約7割を占めており、その熱容量は大気の約1000倍といわれている。したがって、海水の温度が大きく変化した場合には、大気の状態に大きな影響を及ぼし、世界各地の天候や気候に大きな変化をもたらすこととなる(例えば、エルニーニョ現象等)。そこで、海水温度を含む海洋の内部情報を収集して海洋情報の変動を把握することによって、地上への種々の影響を予測したり予防したりすることができる。かかる海洋情報を収集するシステムとして、既にいくつかの提案がなされている(例えば、特許文献1及び特許文献2参照)。
【0003】
特許文献1には、定期的に沈降と浮上を繰り返す移動体によって海洋情報を収集するシステムが開示されている。かかるシステムでは、移動体の浮上中に所定の観測を実施し、海面到達時に観測データを外部に伝送するように構成されている。また、移動体は、可変バラストレシーバを有し、この可変バラストレシーバにバラストオイルを注排水することにより、可変バラストレシーバの体積を膨張又は収縮させ、移動体の海中に占める体積を変化させて移動体の比重を調整している。このように可変バラストレシーバの体積を変化させて移動体の比重を調整することにより、移動体を所望の速度で浮上又は沈降させることができる。特許文献1に記載された海洋情報収集システムは、移動体が海底に係留されていないことから漂流観測式ということができる。
【0004】
特許文献2には、海洋情報を収集する長期観測ステーションを深海深度に配置し、収集された観測データを定期的に沈降と浮上を繰り返すデータ伝送用ブイにより陸上基地に伝送することによって海洋情報を収集するシステムが開示されている。かかるシステムでは、データ伝送用ブイは中継基地又は長期観測ステーションに配置されたウインチ駆動装置により浮沈可能に構成されている。特許文献2に記載された海洋情報収集システムは、長期観測ステーションが海底に係留されていることから定点観測式ということができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第2739534号公報
【特許文献2】特開平6−133371号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載されたような漂流観測式の海洋情報収集システムでは、移動体の移動は海流の流れに委ねられることから、必ずしも必要な箇所のデータを取得することができるとは限らない。したがって、必要な箇所の海洋情報を定期的に取得するためには、移動体の個数を増加せざるを得ない。現在、地球上には3000個以上の漂流観測式の移動体が海洋に漂っている。これらの移動体は、基本的に使い捨てであり、最終的に漂流ゴミとなる。使用済みの移動体を回収することも不可能ではないが、その労力は多大なものとなる。
【0007】
特許文献2に記載されたような定点観測式の海洋情報収集システムでは、設置箇所が特定されていることから、ブイの回収や交換を容易に行うことができ、漂流ゴミの低減を図ることができる。しかしながら、定点観測式の海洋情報収集システムにおいて、ブイを常時浮上させた場合には、海洋交通や漁業活動の妨げになる、貝類等の生物が付着してしまう等の問題があり、その対策の一つとして、ブイを浮沈させる方法がある。そして、ブイを浮沈させる駆動手段は、海洋中に浸水させる必要があることから、機構が複雑になってしまう、高価になってしまう、故障が多い等の問題を生じていた。また、長期観測ステーションを深海深度に設置する定点観測では、大気に影響を与えやすい浅海深度の海洋情報や深度に応じた海洋情報を取得し難いという問題もあった。
【0008】
本発明は、上述した問題点に鑑み創案されたものであり、容易にブイを浮沈させることができるとともに海中待機させることができる、海洋情報収集システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明によれば、海底に配置されるアンカーと、該アンカーに接続され海中に浮遊する中間ブイと、該中間ブイに一端が接続された係留索と、該係留索の他端に接続された観測用ブイと、を有し、前記観測用ブイは、海流の進行方向に長手方向が配置される本体部と、該本体部に配置され膨縮可能な浮袋を備えた比重調整部と、前記本体部に配置されデータ転送を行うアンテナと、前記本体部に配置され所定の海洋情報を取得する観測部と、を有し、前記比重調整部の前記浮袋を膨張させることによって前記観測用ブイを浮上させ、前記比重調整部の前記浮袋を収縮させることによって前記観測用ブイを降下させ海中に待機させるようにした、ことを特徴とする海洋情報収集システムが提供される。
【0010】
前記係留索は、前記観測用ブイの全長の中央部よりも前方かつ先端部よりも後方の位置に接続されていてもよい。
【0011】
前記観測用ブイは、前記本体部の先端側に前記比重調整部が配置され、前記本体部の後端側に前記アンテナ及び前記観測部が配置されていてもよい。
【0012】
前記中間ブイは、前記観測用ブイの海中待機位置と同レベルの深度に浮遊するように構成されていてもよい。
【0013】
前記係留索に配置された揚力発生手段を有し、該揚力発生手段により前記観測用ブイの浮上又は降下を補助するようにしてもよい。
【0014】
前記揚力発生手段は、開閉可能な翼部材を有する海中で浮遊可能なフロートであってもよいし、前記係留索に挿通され拡幅されたフランジ部を有するスリーブであってもよい。
【発明の効果】
【0015】
上述した本発明の海洋情報収集システムによれば、係留索を巻き取ることなく観測用ブイを海中に待機させることができ、浮袋を膨縮させるだけで容易に観測用ブイを浮沈させることができる。また、中間ブイを介して観測用ブイをアンカーに接続したことにより、定点観測することができ、観測用ブイの回収や交換を容易に行うことができ、漂流ゴミの増加を抑制することができる。さらに、浮沈可能な観測用ブイにより海洋情報を収集するようにしたことから、大気に影響を与えやすい浅海深度の海洋情報や深度に応じた多点観測による海洋情報を容易に収集することができる。
【0016】
また、係留索に揚力発生手段を配置することにより、海流によって生じる観測用ブイの浮上を妨げる係留索の張力を低減することができ、観測用ブイの浮上を円滑に行うことができる。
【図面の簡単な説明】
【0017】
【図1】本発明の第一実施形態に係る海洋情報収集システムを示す全体構成図である。
【図2】図1に示した観測用ブイの詳細図であり、(a)は浮上時、(b)は降下時、を示している。
【図3】本発明の第二実施形態に係る海洋情報収集システムを示す全体構成図である。
【図4】図3に示した揚力発生手段の詳細図であり、(a)は降下時、(b)は浮上時、を示している。
【図5】本発明の第三実施形態に係る海洋情報収集システムを示す全体構成図である。
【図6】図5に示した揚力発生手段の詳細図であり、(a)は第一例、(b)は第二例、を示している。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態について図1〜図6を用いて説明する。ここで、図1は、本発明の第一実施形態に係る海洋情報収集システムを示す全体構成図である。図2は、図1に示した観測用ブイの詳細図であり、(a)は浮上時、(b)は降下時、を示している。
【0019】
本発明の第一実施形態に係る海洋情報収集システムは、図1及び図2に示したように、海底に配置されるアンカー1と、アンカー1に接続され海中に浮遊する中間ブイ2と、中間ブイ2に一端が接続された係留索3と、係留索3の他端に接続された観測用ブイ4と、を有し、観測用ブイ4は、海流の進行方向に長手方向が配置される本体部41と、本体部41に配置され膨縮可能な浮袋42aを備えた比重調整部42と、本体部41に配置されデータ転送を行うアンテナ43と、本体部41に配置され所定の海洋情報を取得する観測部44と、を有し、比重調整部42の浮袋42aを膨張させることによって観測用ブイ4を浮上させ、比重調整部42の浮袋42aを収縮させることによって観測用ブイ4を降下させ海中に待機させるようにしたものである。
【0020】
前記アンカー1は、観測用ブイ4を海底に繋ぎ留めておくための部品である。アンカー1は、例えば、海流によって移動しない重量を有する載置式の錘であってもよいし、杭等によって海底に固定されるものであってもよい。アンカー1は、海洋情報を取得したいエリア内の海底に配置される。
【0021】
前記中間ブイ2は、観測用ブイ4の浮沈の起点を構成する部品である。中間ブイ2は、係留索21によりアンカー1と接続されており、係留索21の中間部には水中切離装置22が配置されている。水中切離装置22により、中間ブイ2の設置及び回収を容易に行うことができる。中間ブイ2は、アンカー1に対して略鉛直上の位置に浮遊可能な浮力を有する。
【0022】
また、中間ブイ2は、観測用ブイ4の海中待機位置と同レベルの深度に浮遊するように構成してもよい。例えば、アンカー1を配置する水深が約2000mであって、観測用ブイ4の海中待機位置の深度が約1000mである場合には、中間ブイ2の浮遊深度は約1000mに設定される。このように中間ブイ2の浮遊深度を観測用ブイ4の海中待機位置と同レベルに設定することにより、観測用ブイ4の待機時に係留索3が海流に対して略平行となり、待機中の観測用ブイ4に対する係留索3の張力の発生を抑制することができ、観測用ブイ4の待機位置及び姿勢を安定させることができる。なお、「同レベル」とは、実質的に同じ深度を意味し、±100m程度の誤差を含む趣旨である。
【0023】
ところで、観測用ブイ4の浮上又は浮遊中に、氷山や漂流物等の物体が流れてくることがある。この場合、観測用ブイ4の故障や破損を抑制するために、観測用ブイ4を一時的に沈降させて、これらの物体を避けるようにした方がよい。このとき、観測用ブイ4は回避位置で一時的に留まることになるが、この位置は海中待機位置と異なる位置、すなわち、中間ブイ2の浮遊深度よりも浅い深度であってもよい。
【0024】
前記係留索3は、中間ブイ2と観測用ブイ4とを接続する部品である。係留索3の長さは、観測用ブイ4の海中待機位置の深度、観測用ブイ4が配置される海流の速度、係留索3の海流に対する抵抗の大きさ等の条件により、観測用ブイ4が浮上して海面に到達することができるように設定される。また、係留索3は、できるだけ少ない本数(例えば、一本)で支持可能かつ浮沈可能とするために、例えば、直径5mm以下の細い強化プラスチック素材により構成し、比重を海水の比重と同程度となるように調整してもよい。また、係留索3は、観測用ブイ4の全長の中央部よりも前方かつ先端部よりも後方の位置に接続される。かかる位置に係留索3を接続することにより、観測用ブイ4を海流の進行方向に対して略平行となるように支持し易くすることができる。具体的には、係留索3は、例えば、本体部41の先端部に接続される。
【0025】
前記観測用ブイ4は、海洋情報を取得したいエリア内で浮沈し所定の海洋情報を取得する部品である。本体部41は、密閉空間を形成する円筒形状の容器であり、内部空間には、浮袋42aに作動液(例えば、シリコンオイル)を注排液するオイルポンプ41a、作動液を貯蔵するオイルタンク41b、電子機器に電力を供給する電池パック41c、アンテナ43や観測部44等の制御を行う制御部41d等が配置されている。本体部41は、海流に対して略平行な姿勢(例えば、迎角が0〜45°の範囲)を維持できるように細長い形状を有し、長手方向が海流の進行方向に沿って配置される。このように観測用ブイ4の長手方向を海流の進行方向に配置することにより、観測用ブイ4の海流を受ける受圧面積を低減することができる。また、本体部41の後端部には、海流中における観測用ブイ4の姿勢を保持する安定翼41eを配置するようにしてもよい。
【0026】
また、観測用ブイ4は、本体部41の先端側に比重調整部42が配置され、本体部41の後端側にアンテナ43及び観測部44が配置されている。観測用ブイ4は、係留索3に接続されているとともに、海流により押し流されているため、一般に下流側の方が上流側よりも浮き上がり易い性質を有する。そこで、海面上に露出させたいアンテナ43を本体部41の後端部に配置し、観測用ブイ4の浮沈を促す比重調整部42を本体部41の先端部に配置している。同様の理由により、オイルタンク41bも本体部41の後端部寄りに配置されている。また、配線等を容易にするために、アンテナ43と近接する位置に観測部44及び制御部41dを集約して配置している。
【0027】
比重調整部42は、膨縮可能な浮袋42aと、浮袋42aの外周を覆うカバー42bと、本体部41内に配置されるオイルポンプ41aと、により構成される。浮袋42aは、海水に対して耐性を有する柔らかい素材(例えば、樹脂等)により構成される。カバー42bは、浮袋42aの破損を抑制する部品であり、外周面に複数の開口部42cが形成されている。したがって、カバー42b内は海水で満たされた状態になっている。
【0028】
浮袋42aにオイルポンプ41aを作動させて作動液を注液すると、図2(a)に示したように、浮袋42aはカバー42b内で膨張し、カバー42b内の海水が開口部42cから海中に押し出される。その結果、観測用ブイ4の見かけ上の体積が増大し、観測用ブイ4の比重が低下し、浮力が増大する。したがって、観測用ブイ4を浮上させることができる。
【0029】
オイルポンプ41aを作動させて浮袋42aから作動液を排液すると、図2(b)に示したように、浮袋42aはカバー42b内で収縮し、開口部42cからカバー42b内に海水が流入する。その結果、観測用ブイ4の見かけ上の体積が減少し、観測用ブイ4の比重が上昇し、浮力が低下する。したがって、観測用ブイ4を降下させることができる。なお、オイルポンプ41aの作動は、例えば、制御部41dによって処理される。
【0030】
アンテナ43は、観測部44により取得した海洋情報データを地上基地局や観測船等の主装置にデータ伝送する部品である。アンテナ43は、主装置のアンテナと直接的に交信してもよいし、通信衛星を介して主装置と交信するようにしてもよい。
【0031】
観測部44は、所定の海洋情報を収集する部品である。観測部44は、例えば、塩分濃度等の基礎情報を取得するCTDセンサ(電気伝導度:Conductivity、温度:Temperature、深度:Depthを計測するセンサ)、海水のサンプリング採集を行う採水装置の他、圧力センサ、磁気センサ、放射線測定器、ソナー等、種々の計測・観測用のセンサや装置により構成される。これらのセンサ及び装置は、定点観測を行うエリアで取得したい海洋情報に応じて適宜選択される。観測部44により取得された海洋情報は、制御部41dに配置された記憶部(メモリ)に保存される。なお、記憶部(メモリ)には、観測部44の各センサ等の操作スケジュールや観測用ブイ4の浮沈スケジュール等が保存されており、これらのスケジュールに従って制御部41dが計測や浮沈に必要な所定の操作を行う。
【0032】
観測部44は、例えば、観測用ブイ4の浮上時にデータを取得するようにしてもよいし、海中待機時にデータを取得するようにしてもよい。また、観測部44により取得した海洋情報データは、観測用ブイ4が海面に浮上した時にアンテナ43から定期的にデータ伝送するようにしてもよいし、観測用ブイ4を回収するまで継続的にデータを記憶部(メモリ)に保存するようにしておいてもよい。なお、観測部44の配置は、本体部41の後端部に限定されるものではなく、配置するセンサや装置の種類や大きさによって任意に設定することができ、例えば、本体部41の側面部や下面部であってもよい。
【0033】
次に、上述した第一実施形態に係る海洋情報収集システムの作用について説明する。図1に示したように、アンカー1は海洋情報を取得したいエリア内の海底に配置されている。具体的には、観測用ブイ4はアンカー1よりも海流の下流側に位置することから、アンカー1の配置位置は、海洋情報を取得したいエリアに観測用ブイ4が配置されるように、海流の速度や変動等を考慮して設定される。なお、アンカー1の水深は、一般的に数百〜数千mである。
【0034】
観測用ブイ4は、図示したように、中間ブイ2を起点に浮沈する。ここで、浮上した状態を実線、降下した状態を一点鎖線で表示している。浮袋42aを膨張させることによって観測用ブイ4の比重を低下させて観測用ブイ4を浮上させる。観測用ブイ4は、最終的に海面に到達し、アンテナ43が海面から露出される。観測部44のCTDセンサにより計測された深度により、観測用ブイ4が海面に到達したか否かを把握することができ、観測用ブイ4が海面に到達した後、アンテナ43から必要な海洋情報のデータ伝送を行う。
【0035】
データ伝送が終了した後、観測用ブイ4は海中待機位置に戻される。具体的には、浮袋42aを収縮させることによって観測用ブイ4の比重を上昇させて観測用ブイ4を降下させる。観測用ブイ4は、最終的に海中待機位置に到達する。このとき、中間ブイ2と海中待機位置の深度は同レベルに設定されていることから、係留索3は海流の進行方向に対して平行に近い状態で海中に展開される。したがって、係留索3の海流を受ける受圧面積を低減することができ、係留索3に発生する張力を低減することができ、観測用ブイ4の待機状態を安定させることができる。なお、観測用ブイ4の海中待機深度は、例えば、数十m〜1000m程度である。
【0036】
この観測用ブイ4の浮沈スケジュールは、定点観測を行う場所、取得する海洋情報の種類等によって任意に設定することができ、数日ごとであってもよいし、数時間ごとであってもよいし、数十分ごとであってもよい。また、全てのデータをデータ伝送する必要はなく、データ伝送しない海洋情報データは観測用ブイ4を回収した後、データを回収するようにしてもよい。地上基地局や観測船等に収集された海洋情報は、所定の処理により画面表示されたり、分析されたりする。
【0037】
上述した実施形態に係る海洋情報収集システムによれば、係留索3を巻き取ることなく観測用ブイ4を海中に待機させることができ、浮袋42aを膨縮させるだけで容易に観測用ブイ4を浮沈させることができる。また、中間ブイ2を介して観測用ブイ4をアンカー1に接続したことにより、容易に定点観測することができ、観測用ブイ4の回収や交換を容易に行うことができ、漂流ゴミの増加を抑制することができる。さらに、浮沈可能な観測用ブイ4により海洋情報を収集するようにしたことから、大気に影響を与えやすい浅海深度の海洋情報や深度に応じた多点観測による海洋情報を容易に収集することができる。
【0038】
続いて、本発明の第二実施形態に係る海洋情報収集システムについて説明する。ここで、図3は、本発明の第二実施形態に係る海洋情報収集システムを示す全体構成図である。図4は、図3に示した揚力発生手段の詳細図であり、(a)は降下時、(b)は浮上時、を示している。なお、上述した第一実施形態と同じ構成部品については、同じ符号を付して重複した説明を省略する。
【0039】
図3に示した第二実施形態に係る海洋情報収集システムは、係留索3に配置された揚力発生手段5を有し、揚力発生手段5により観測用ブイ4の浮上又は降下を補助するようにしたものである。係留索3は、一般に、海流の影響を受けて下流側に押し流され、観測用ブイ4が浮上しようとする場合に、それを妨げるような張力を発生する。したがって、海流の速度が速い場合には、観測用ブイ4が海面まで到達するのに時間を要したり、海面まで到達できなかったりしてしまうことが予想される。そして、係留索3の張力(抵抗)を観測用ブイ4の浮力で調整しようとすれば、浮袋42aが大きくなってしまい、作動液の分量が増加して本体部41の重量が増加し、観測用ブイ4が大型化してしまうこととなる。そこで、本実施形態では、係留索3に少なくとも係留索3の浮上を補助する揚力発生手段5を配置している。
【0040】
図4に示したように、揚力発生手段5は、例えば、開閉可能な翼部材51aを有する海中で浮遊可能なフロート51により構成される。図4(a)に示したように、観測用ブイ4が海中待機状態の場合には、フロート51は翼部材51aを閉じた状態になっており、海中に浮遊している。フロート51が浮遊状態を維持できないほど重たい場合には、海中待機状態において、フロート51が係留索3よりも沈んでしまうことによって、係留索3を撓ませてしまい、海流の影響を受けて観測用ブイ4を降下させようとしてしまうことから、海中待機状態を安定させることができない。そこで、フロート51は、翼部材51aを閉じた状態で、係留索3を大きく撓ませない程度に浮遊した状態を維持できる浮力を有するように構成される。また、浮力が大き過ぎる場合も、係留索3を部分的に持ち上げてしまうことから、例えば、フロート51の比重を係留索3の比重よりも若干軽くするようにしてもよい。これらの点を考慮すれば、フロート51は、例えば、中性浮量又はそれよりも若干軽くなるように構成される。かかる構成により、フロート51は、係留索3よりも常に上方に位置することから、係留索3の絡まりを抑制することができる。
【0041】
フロート51の本体は、海中待機状態で抵抗を少なくするために、例えば、略円柱形状に構成される。また、フロート51の海中における姿勢を保持するために、断面形状を流線型に構成したり、外周面にフィン(整流板)を配置したりするようにしてもよい。フロート51の下部には接続金具51bが配置されており、接続金具51bには係留索3から分岐された分岐索51cが接続されている。接続金具51bは、例えば、分岐索51cが自由に動けるようにスイベルジョイントにより構成される。なお、ここでは、フロート51を一つだけ配置した場合を図示したが、海流速度や待機深度に応じて複数のフロート51を係留索3に配置するようにしてもよい。
【0042】
図4(b)に示したように、観測用ブイ4の浮上時には、翼部材51aを開き、海流を受ける受圧面積を増加させて揚力を発生させる。翼部材51aは、受圧面積を増加させるような曲面形状を有していてもよい。フロート51の本体内には、翼部材51aの開閉駆動装置(図示せず)が内蔵されている。開閉駆動装置は、海中待機状態の深度における水圧に対抗して翼部材51aを広げることができる出力を有していれば、どのような機構であってもよく、例えば、回転運動を行う電動モータであってもよいし、電動モータと歯車機構の組み合わせであってもよいし、往復運動を行うアクチュエータであってもよいし、アクチュエータとカム機構の組み合わせであってもよい。
【0043】
開閉駆動装置への電力は、フロート51の本体内に搭載されたバッテリーから供給してもよいし、観測用ブイ4に搭載された電池パック41cから供給するようにしてもよい。なお、観測用ブイ4から電力供給する場合には、係留索3及び分岐索51cを電力ケーブルで構成したり、係留索3及び分岐索51cに電力ケーブルを付設したりしておく必要がある。また、翼部材51aの開閉スケジュール制御は、フロート51の本体内に搭載された制御装置により処理してもよいし、観測用ブイ4に搭載された制御部41dにより処理するようにしてもよいし、超音波等の電波を送受信する機構を配置して外部から制御信号を送信するようにしてもよい。また、海流速度や浮上中の深度等の条件に応じて、翼部材51aの開閉角度や迎角を制御するようにしてもよい。
【0044】
ここで、上述した第二実施形態に係る海洋情報収集システムの作用について説明する。なお、図3において、観測用ブイ4が浮上した状態を実線、降下した状態を一点鎖線で表示している。
【0045】
観測用ブイ4の海中待機状態において、翼部材51aは閉じており、フロート51は観測用ブイ4と略同じ深度を維持した状態で海中に浮遊している。そして、観測用ブイ4を浮上させる場合には、浮袋42aに作動液を注入するとともに、フロート51の翼部材51aを開いて揚力を発生させる。これらの動作は、観測用ブイ4の海中待機深度や浮上速度、海流速度等の条件により、同時に開始するように制御してもよいし、タイミングをずらして作動させるように制御してもよい。
【0046】
翼部材51aを広げたフロート51は、翼部材51aにより海流を受けて揚力を発生し、係留索3を持ち上げる。フロート51の揚力を観測用ブイ4の浮力よりも大きくすることにより、観測用ブイ4の浮上を先導するようにフロート51が浮上し、係留索3が観測用ブイ4を下方に引っ張る張力の発生を抑制することができる。なお、フロート51の揚力は、観測用ブイ4の浮力と同じ程度か少し低い程度であっても、フロート51の浮上によって係留索3を観測用ブイ4の浮上に合わせて持ち上げることができ、係留索3が観測用ブイ4を下方に引っ張る張力の発生を抑制することができる。フロート51は、海面から露出した場合には波力により破損したり揚力が安定しなかったりすることから、最終的に、海面付近に到達するように調整される。
【0047】
観測用ブイ4のデータ伝送が終了した後、観測用ブイ4は浮袋42aを収縮させて海中に降下する。このときフロート51は、翼部材51aを閉じて揚力の発生を終了し、観測用ブイ4の降下を妨げないようにする。翼部材51aを畳んだフロート51は、観測用ブイ4の降下に伴って海中に降下する。最終的に、観測用ブイ4は海中待機位置に到達して浮遊し、フロート51は係留索3よりも上方の位置で浮遊する。
【0048】
上述した第二実施形態に係る海洋情報収集システムによれば、係留索3に揚力発生手段5を配置することにより、海流によって生じる観測用ブイ4の浮上を妨げる係留索3の張力の発生を抑制することができ、観測用ブイ4の浮上を円滑に行うことができる。
【0049】
続いて、本発明の第三実施形態に係る海洋情報収集システムについて説明する。ここで、図5は、本発明の第三実施形態に係る海洋情報収集システムを示す全体構成図である。図6は、図5に示した揚力発生手段の詳細図であり、(a)は第一例、(b)は第二例、を示している。なお、上述した第一実施形態及び第二実施形態と同じ構成部品については、同じ符号を付して重複した説明を省略する。
【0050】
図5に示した第三実施形態に係る海洋情報収集システムは、上述した第二実施形態と同様に、揚力発生手段5を有するものである。図5及び図6に示した揚力発生手段5は、係留索3に挿通され拡幅されたフランジ部52aを有するスリーブ52により構成されている。図5に示したように、係留索3には複数のスリーブ52が挿通される。各スリーブ52は、個別に係留索3に固定されていてもよいし、係留索3に一定の範囲内で移動可能に配置されていてもよい。
【0051】
図6(a)及び(b)に示したように、スリーブ52は、例えば、係留索3に挿通される円筒部52bと、円筒部52bより拡径されたフランジ部52aと、を有する。円筒部52bは、係留索3に対するスリーブ52の姿勢を安定させるために、フランジ部52aの両側に配置される。フランジ部52aは、海流を受ける受圧面を形成する部分であり、海流速度、スリーブ52の個数等の条件により大きさが設定される。なお、フランジ部52aは、円筒部52bの全周に渡って拡径した場合を図示しているが、部分的に拡幅するように形成してもよい。
【0052】
図6(a)に示した第一例は、係留索3に配置したスリーブ52全体の上部及び下部にストッパ52cを配置したものである。かかる構成により、スリーブ52は、ストッパ52c間で自由に移動することができ、係留索3の可撓性を維持しつつ揚力を発生することができる。ストッパ52cは、例えば、金属材や樹脂材により構成され、係留索3を挟持する構成であってもよいし、係留索3に固着(接着や溶着)する構成であってもよいし、テープ状のものを巻き付ける構成であってもよい。
【0053】
図6(b)に示した第二例は、係留索3に配置した各スリーブ52の上部及び下部にそれぞれストッパ52cを配置したものである。かかる構成により、各スリーブ52は、ストッパ52c間で自由に移動することができ、スリーブ52の位置を一定の範囲内に留めながら、係留索3の可撓性を維持しつつ揚力を発生することができる。
【0054】
ここで、上述した第三実施形態に係る海洋情報収集システムの作用について説明する。なお、図5において、観測用ブイ4が浮上した状態を実線、降下した状態を一点鎖線、降下時における中間状態を破線で表示している。また、各状態において、説明の便宜上、スリーブ52のみ実線で図示している。
【0055】
観測用ブイ4の海中待機状態において、係留索3は海流の進行方向に対して略平行な状態になっていることから、スリーブ52のフランジ部52aは海流の進行方向に対して略垂直な状態になっており、揚力を発生し難い状態になっている。したがって、係留索3及び観測用ブイ4は安定した海中待機状態を維持する。
【0056】
そして、観測用ブイ4は、浮袋42aに作動液を注入して浮上を開始すると係留索3は海流の進行方向に対して傾斜した状態になり、スリーブ52のフランジ部52aも海流の進行方向に対して傾斜した状態となり、スリーブ52は海流を受けて揚力を発生し、係留索3を持ち上げる。したがって、スリーブ52により、観測用ブイ4の浮上に伴って係留索3に揚力を発生させることができ、係留索3が観測用ブイ4を下方に引っ張る張力の発生を抑制することができる。最終的に、実線で示したように、観測用ブイ4は海面に到達し、各スリーブ52は海流の進行方向の力FTにより揚力FLを発生させていることから、観測用ブイ4の海面に浮遊した状態を安定させることができる。
【0057】
観測用ブイ4のデータ伝送が終了した後、観測用ブイ4は浮袋42aを収縮させて海中に降下する。このとき、スリーブ52は揚力FLを発生させているが、観測用ブイ4の降下に伴って、図の中間状態に示したように、上方のスリーブ52から順に、海流の進行方向に対して反転するように姿勢を変えることから、スリーブ52の揚力は徐々に低下する。そして、スリーブ52が下方を向いたときには、スリーブ52は係留索3を降下させる方向に力を発生することから、スリーブ52の姿勢の変化を加速させることができ、次第に揚力が低下し、観測用ブイ4を円滑に降下させることができる。最終的に、係留索3及び観測用ブイ4は、海中待機位置に到達し浮遊する。
【0058】
上述した第三実施形態に係る海洋情報収集システムによれば、第二実施形態と同様に、係留索3に揚力発生手段5を配置することにより、海流によって生じる観測用ブイ4の浮上を妨げる係留索3の張力の発生を抑制することができ、観測用ブイ4の浮上を円滑に行うことができる。
【0059】
また、スリーブ52よりもフロート51の方が大きな揚力を発生させることができることから、例えば、親潮等のような2ノット以下の緩やかな流れの海流に対してスリーブ52を使用し、黒潮等のような2ノット以上の急な流れの海流に対してフロート51を使用するようにしてもよい。
【0060】
本発明は上述した実施形態に限定されず、揚力発生手段5としてフロート51及びスリーブ52の両方を組み合わせて使用してもよい等、本発明の趣旨を逸脱しない範囲で種々変更が可能であることは勿論である。
【符号の説明】
【0061】
1 アンカー
2 中間ブイ
3,21 係留索
4 観測用ブイ
5 揚力発生手段
41 本体部
42 比重調整部
42a 浮袋
43 アンテナ
44 観測部
51 フロート
51a 翼部材
52 スリーブ
52a フランジ部
【特許請求の範囲】
【請求項1】
海底に配置されるアンカーと、
該アンカーに接続され海中に浮遊する中間ブイと、
該中間ブイに一端が接続された係留索と、
該係留索の他端に接続された観測用ブイと、を有し、
前記観測用ブイは、海流の進行方向に長手方向が配置される本体部と、該本体部に配置され膨縮可能な浮袋を備えた比重調整部と、前記本体部に配置されデータ転送を行うアンテナと、前記本体部に配置され所定の海洋情報を取得する観測部と、を有し、
前記比重調整部の前記浮袋を膨張させることによって前記観測用ブイを浮上させ、前記比重調整部の前記浮袋を収縮させることによって前記観測用ブイを降下させ海中に待機させるようにした、ことを特徴とする海洋情報収集システム。
【請求項2】
前記係留索は、前記観測用ブイの全長の中央部よりも前方かつ先端部よりも後方の位置に接続されている、ことを特徴とする請求項1に記載の海洋情報収集システム。
【請求項3】
前記観測用ブイは、前記本体部の先端側に前記比重調整部が配置され、前記本体部の後端側に前記アンテナ及び前記観測部が配置されている、ことを特徴とする請求項1に記載の海洋情報収集システム。
【請求項4】
前記中間ブイは、前記観測用ブイの海中待機位置と同レベルの深度に浮遊するように構成されている、ことを特徴とする請求項1に記載の海洋情報収集システム。
【請求項5】
前記係留索に配置された揚力発生手段を有し、該揚力発生手段により前記観測用ブイの浮上又は降下を補助するようにした、ことを特徴とする請求項1に記載の海洋情報収集システム。
【請求項6】
前記揚力発生手段は、開閉可能な翼部材を有する海中で浮遊可能なフロート又は前記係留索に挿通され拡幅されたフランジ部を有するスリーブである、ことを特徴とする請求項5に記載の海洋情報収集システム。
【請求項1】
海底に配置されるアンカーと、
該アンカーに接続され海中に浮遊する中間ブイと、
該中間ブイに一端が接続された係留索と、
該係留索の他端に接続された観測用ブイと、を有し、
前記観測用ブイは、海流の進行方向に長手方向が配置される本体部と、該本体部に配置され膨縮可能な浮袋を備えた比重調整部と、前記本体部に配置されデータ転送を行うアンテナと、前記本体部に配置され所定の海洋情報を取得する観測部と、を有し、
前記比重調整部の前記浮袋を膨張させることによって前記観測用ブイを浮上させ、前記比重調整部の前記浮袋を収縮させることによって前記観測用ブイを降下させ海中に待機させるようにした、ことを特徴とする海洋情報収集システム。
【請求項2】
前記係留索は、前記観測用ブイの全長の中央部よりも前方かつ先端部よりも後方の位置に接続されている、ことを特徴とする請求項1に記載の海洋情報収集システム。
【請求項3】
前記観測用ブイは、前記本体部の先端側に前記比重調整部が配置され、前記本体部の後端側に前記アンテナ及び前記観測部が配置されている、ことを特徴とする請求項1に記載の海洋情報収集システム。
【請求項4】
前記中間ブイは、前記観測用ブイの海中待機位置と同レベルの深度に浮遊するように構成されている、ことを特徴とする請求項1に記載の海洋情報収集システム。
【請求項5】
前記係留索に配置された揚力発生手段を有し、該揚力発生手段により前記観測用ブイの浮上又は降下を補助するようにした、ことを特徴とする請求項1に記載の海洋情報収集システム。
【請求項6】
前記揚力発生手段は、開閉可能な翼部材を有する海中で浮遊可能なフロート又は前記係留索に挿通され拡幅されたフランジ部を有するスリーブである、ことを特徴とする請求項5に記載の海洋情報収集システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−103678(P2013−103678A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−250701(P2011−250701)
【出願日】平成23年11月16日(2011.11.16)
【出願人】(000000099)株式会社IHI (5,014)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月16日(2011.11.16)
【出願人】(000000099)株式会社IHI (5,014)
[ Back to top ]