
消火設備
【課題】制御が簡単でありながら、正確な消火をすることができる消火設備を提供するを提供する。
【解決手段】消火用高出力パルスレーザ11と、火源基底部方向特定手段12と、それらの指向方向を上下左右に変化させる指向方向変化手段13とを有する消火装置1を備え、火源基底部方向特定手段12の動作と、指向方向変化手段13の動作とにより、火源Fを検出すると共に、火源基底部FBの方向を特定し、その特定した方向に消火用高出力パルスレーザ11の指向方向を合わせ、消火用高出力パルスレーザ11の動作により、火源基底部FBに向けてレーザ光を発射して、火源基底部FBの直下にある物質にレーザ光を照射し、そこにブラスト波を駆動して、火源Fの炎を吹き飛ばして消火をするように構成されている。
【解決手段】消火用高出力パルスレーザ11と、火源基底部方向特定手段12と、それらの指向方向を上下左右に変化させる指向方向変化手段13とを有する消火装置1を備え、火源基底部方向特定手段12の動作と、指向方向変化手段13の動作とにより、火源Fを検出すると共に、火源基底部FBの方向を特定し、その特定した方向に消火用高出力パルスレーザ11の指向方向を合わせ、消火用高出力パルスレーザ11の動作により、火源基底部FBに向けてレーザ光を発射して、火源基底部FBの直下にある物質にレーザ光を照射し、そこにブラスト波を駆動して、火源Fの炎を吹き飛ばして消火をするように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、消火設備に関し、より詳細にはレーザ消火装置を用いた自動消火設備に関する。
【背景技術】
【0002】
赤外線式火災感知器で火源位置を特定し、火源位置に向けて放水銃等の可動式ノズルから放水して消火をする装置が実用化されている。
【0003】
しかしながら、火源位置を特定するには、防護対象の建築物等の形状等の地図情報のデータを記憶しておき、検出した火源方向の情報等を用いた複雑な演算処理、具体的には、火源方向の延長線上にある建築物(地図情報によって情報が与えられる)との交点を火源位置と判断する等の複雑な演算処理が必要であった(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平06−000229号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記のように大きなデータを記憶し、複雑な演算処理が必要なのは、炎から発せられる赤外線は直進して検出されるのに対して、可動式ノズル等から消火のために放出される消火用水は放物線状の軌跡を描くという違いがあり、火源方向に放水しても消火用水の射程(着地点)の制御を行わなければ、放出した消火用水を正確には火源に命中させられないことに原因がある。
【0006】
この発明は、前記の事情に鑑み、制御が簡単でありながら、正確な消火をすることができる消火設備を提供することを目的とする。
【課題を解決するための手段】
【0007】
この発明は、消火用高出力パルスレーザと、火源基底部方向特定手段と、それらの指向方向を上下左右に変化させる指向方向変化手段とを有する消火装置を備えており、前記火源基底部方向特定手段の動作と、前記指向方向変化手段の動作とにより、火源を検出すると共に、火源基底部の方向を特定し、その特定した方向に前記消火用高出力パルスレーザの指向方向を合わせ、前記消火用高出力パルスレーザの動作により、火源基底部に向けてレーザ光を発射して、火源基底部の直下にある物質にレーザ光を照射し、そこにブラスト波を駆動して、火源の炎を吹き飛ばして消火をするように構成されており、そして、前記消火用高出力パルスレーザの動作と、前記火源基底部方向特定手段の動作と、前記指向方向特定手段の動作とを制御する制御装置を更に備えていることを特徴とする消火設備である。
【0008】
又、この発明は、前記指向方向変化手段は、前記消火用高出力パルスレーザと、前記火源基底部特定手段とを上下方向に回動可能に支持すると共に、左右方向に回動可能に支持する回動支持機構であることを特徴とする消火設備である。
【0009】
又、この発明は、前記消火装置は、平常時には待機状態にあり、火災時には、火災感知手段による火災の感知に連動して起動するものであることを特徴とする消火設備である。
【0010】
又、この発明は、前記消火装置は、平常時には待機状態にあり、人感センサによる人の感知に連動して起動するものであることを特徴とする消火設備である。
【0011】
又、この発明は、前記消火装置を複数備え、前記制御装置は、それら複数の消火装置のそれぞれについて、他の消火装置との間を結ぶ直線を基準軸として記憶する記憶手段を有するものであると共に、火源を検出し、火源基底部の方向を特定した複数の消火装置のそれぞれについて、前記基準軸を基準として、火源基底部の方向の相対方位角を求め、それら求めた相対方位角を互いに比較して、火源に近い消火装置を選択するように演算する演算手段を有するものであり、それにより、火源検出し、火源基底部の方向を特定した複数の消火装置から、火源に最も近い消火装置を選択し、その消火装置が消火の動作をするように制御するものであることを特徴とする消火設備である。
【発明の効果】
【0012】
この発明は、消火用高出力パルスレーザを用い、直線状に進行するレーザ光によって消火をするものであり、火源基底部の方向さえ特定できれば、その方向に消火用高出力パルスレーザの指向方向を合わせるだけで、正確に、火源基底部の直下にある物質にレーザ光を照射して消火をすることができる。
【0013】
即ち、この発明は、放物線を描いて進行する消火水によって消火をする従来例とは異なり、火源の位置までは特定する必要がなく、設置場所の地図情報等の大きなデータを記憶しなくとも、又、複雑な演算をしなくとも、正確な消火をすることができる。
【0014】
従って、この発明によれば、制御が簡単でありながら、正確な消火をすることができる消火設備を得ることができる。
【図面の簡単な説明】
【0015】
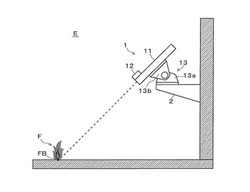
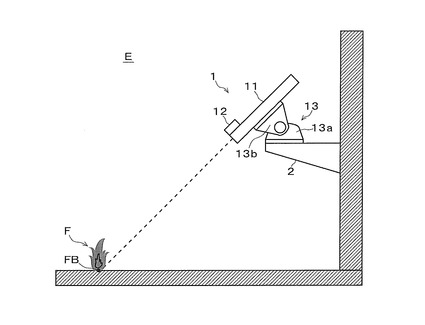
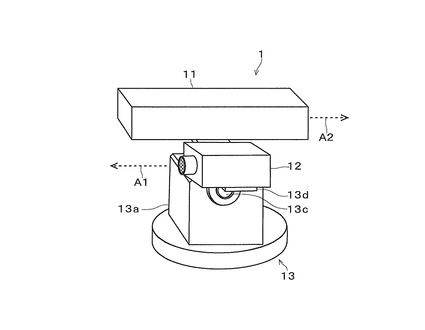
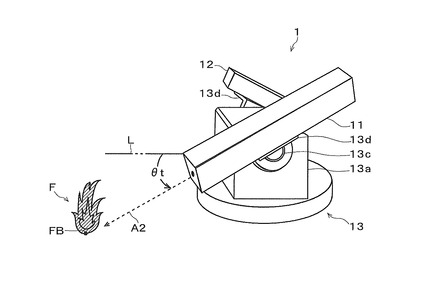
【図1】この発明の消火設備の一構成例を示し、設置状態にある消火装置の側面図を含む構成図であり、火災時、消火装置の消火用高出力パルスレーザが火源基底部方向を指向している状態を示したものである。
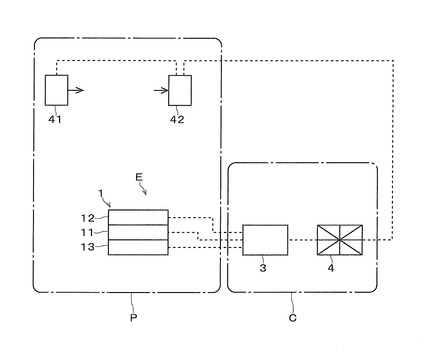
【図2】同上の消火設備のシステム構成の一例を示したシステムブロック図である。
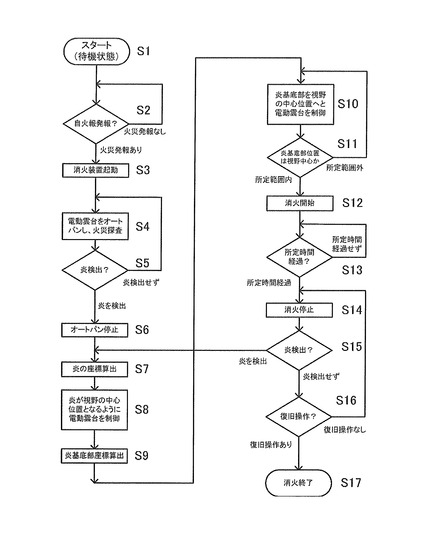
【図3】同上の消火設備の動作の流れの一例を示した動作フロー図である。
【図4】同上の消火設備の消火装置の他の構成例を示した分解図である。
【図5】同上の斜視図であり、平常時、待機している際の状態を示したものである。
【図6】同上の斜視図であり、火災時、火源基底部方向特定手段である赤外線カメラが火源基底部方向を指向している際の状態を示したものである。
【図7】同上の斜視図であり、火災時、高出力パルスレーザが火源基底部方向を指向している際の状態を示したものである。
【図8】この発明の消火設備における消火装置の選択をする例を説明するための図であり、防護領域に対する複数の消火装置の配置等を平面視で示した図である。
【発明を実施するための形態】
【0016】
この発明の消火設備の実施形態を図1乃至8に基づき説明する。
【0017】
先ず、図1乃至3に基づき、この発明の消火設備の実施形態の一例を自火報(自動火災報知設備)と連動して起動する消火設備Eに適用する場合を例に説明する。
【0018】
図1に示したように、消火設備Eは消火装置1を備えているが、消火装置1は、消火用高出力レーザの一例である消火用レーザ装置11と、火源基底部方向特定手段の一例である赤外線カメラ12と、それらの指向方向を変化させる指向方向変化手段の一例であり、それらを左右方向に回動可能に支持すると共に、上下方向に回動可能に支持する回動支持機構の一例であり、垂直軸回りに回動可能な回転台13aとその上に設けられた水平軸回りに回動可能な支持台13bとからなる電動雲台13等を有しており、電動雲台13がそれを支持する架台2によりその支持台13b上に支持されている消火用レーザ装置11と赤外線カメラ12とが防護範囲(火源Fを含む)を俯瞰できるような位置に設けられている。尚、図2に基づいて、次に詳細に説明するように、この消火装置1は制御装置の一例である防災センタC内の消火装置制御盤3に接続されている。
【0019】
この消火設備Eは自動火災報知設備(以下自火報という)の火災感知手段による火災の感知に連動して起動するよう構成されており、即ち、図2に示したように、防護区画P内には火災感知手段の一例として、光電式分離型感知器を構成する一対の火災感知器41(投光部側)と同42(受光部側)とが設けられており、それら火災感知器41、42より、両者間の煙による減光で火災を感知することができるようになっており、又、消火装置1の防護範囲を監視範囲として火災を感知することができるようになっている。尚、火災感知手段としては、他の種類のものを用いることもでき、防護対象とする建物等に応じて想定される火災の感知に最適のものを用いることができる。
【0020】
火災感知器41、42は、防災センタC(消火設備Eを全体的に制御する機器等が設けられている。)に配設された火災受信機4に接続されており、それにより自火報を構成しており、火災感知器41、42が防護区画Pにおいて発生する火災を感知すると、火災受信機4が火災警報を発するようになっている。そして、火災受信機4は火災信号を消火装置制御盤3に送出するようになっており、消火設備Eは自火報に連動して起動可能になっている。ここで、図2においては、消火設備Eとして、1つの防護区画P中の構成しか示していないが、消火設備Eを複数の防護区画を防護するものとしてもよいことは勿論であり、複数の防護区画に対応して、消火装置1を複数備えると共に、自火報を構成する火災感知器41、42を複数組備えるものとしてもよいことは勿論である。
【0021】
消火装置制御盤3は、図示はしないが、画像処理装置を含む制御装置を有しており、消火用レーザ装置11と、赤外線カメラ12、電動雲台13等の動作を制御することができるようになっており、火災受信機4から火災信号を受信すると、消火用レーザ装置11を火源Fに照準させて火災消火するためにそれらの動作を制御することができるようになっている。
【0022】
即ち、消火装置制御盤3は、前記の火災信号を受信すると、先ず、火源を検出するための火源探査動作を行うように制御するようになっているが、具体的には、電動雲台13を防護区画Pの火源検出を行えるよう建築物等に応じて適宜決定される所定の角度(又は角度の範囲)で左右方向に回転させて、赤外線カメラ122にその範囲を走査するオートパン動作をさせるようになっている。これにより、赤外線カメラ12は水平方向の広い範囲を走査することとができるようになっている。尚、垂直方向も広く探査することができるように、赤外線カメラ12のレンズとして広角(例えば50度)のものを用いることができる。ここで、赤外線カメラのレンズを広角にすると、俯角(上下角)を固定したままオートパンすることによって広域を素早く監視することができるが、周辺視野はレンズの収差で画像が歪む。最終的に最も収差の少ない視野中心で照準判断するので、収差による照準誤差の影響がないように制御される。
【0023】
次いで、消火装置制御盤3は、赤外線カメラ12が前記のように動作して得た赤外線画像信号を受信して、内部の画像処理装置によって所定のレベル以上の高温点を検出するように制御し、高温点を検出したら、そこを火源として検出し、電動雲台13の回転を停止すると共に、検出した火源について、その方向を座標として算出するようになっており、又、その座標値に基づき、火源の方向が赤外線カメラ12のほぼ正面方向になるように電動雲台13を上下左右に回転制御すると共に、画像処理装置によって、検出した火源の赤外線画像信号から火源の基底部FBの方向を座標として得るよう演算するようになっている。
【0024】
ここで、火源基底部FBとは、赤外線カメラ12が検出した火源Fの赤外線画像における炎部分の最下部を意味する。すなわち、火源Fの下方にある可燃物が燃焼して炎が立ち上っている部分でもある。したがって、火源基底部FBに消火用レーザ装置11を照準させ、前記照準位置に消火用レーザ装置11よりレーザー光を照射してブラスト波を発生させると、前記可燃物から熱分解によって放出されて燃焼している可燃ガスを吹き飛ばすことができるので、前記可燃ガスが燃えることによって生じている火源Fの炎を消火することができる。
【0025】
なお、火源基底部FBの座標(ここでは二次元の直交座標を用いて説明する)は、火源Fを補足した赤外線カメラ12からの赤外線画像信号を消火装置制御盤3に備わる図示しない画像処理装置によって画像処理し、例えば以下のように画像処理(演算)することによって、求めることができる。
【0026】
まず、赤外線カメラ12から送出される赤外線画像信号に基づいた火源Fの赤外線画像において、予め定めた所定温度値以上を示している画素を抽出し、前記所定温度以上の部分を切り出す二値化処理を行い、前記炎の二次元形状を特定する。次に、前記炎の二次元形状の輪郭線を抽出し、該輪郭線において最も下方に位置する画素を求める。ここに火源基底部FBの高さ方向の座標であるY座標の値yoと横方向の座標であるxoが定まるが、該当する画素が横方向に連続して複数存在する場合は、その横方向の中央に位置する画素の横方向の座標であるX座標の値を以て火源基底部FBの横方向の座標であるX座標の値xoとすることによって、火源基底部FBの座標xo,yoが求まる。
【0027】
そして、消火装置制御盤3は、前記のようにして得た火源基底部FB方向の座標値に基づき、再度電動雲台3を上下左右に回転制御して、赤外線カメラ12の視野中心に火源基底部FBが位置するように制御し、火源基底部FBが赤外線カメラ12の視野中心に位置したことを確認したときは、赤外線カメラ12と同一方向を指向している消火用レーザ装置1は火源基底部FB方向に向かうので、消火用レーザ装置11を火源基底部FB方向に照準させるようになっている。
【0028】
尚、図1は、消火装置1において、消火用レーザ装置11と赤外線カメラ12の指向方向変化手段として、電動雲台13を用い、その電動雲台13上に消火用レーザ装置11を固定して載置すると共に、それと指向方向を一致させつつ、消火用レーザ11装置上に赤外線カメラ12を固定して載置する例を示したものとなっている。この例の場合、消火用レーザ装置11と赤外線カメラ12の指向方向が一致しているので、赤外線カメラ12を火源基底部FB方向に正確に指向させれば、消火用レーザ装置11も火源基底部FB方向に指向させることができる。これにより、図1の消火装置1の例においては、消火用レーザ装置11の火源基底部FB方向への指向制御は、赤外線カメラ12の指向制御により行うことができ、即ち、火源基底部FB方向の座標値を前記のようにして得たら、火源基底部FB方向の座標値が赤外線カメラ12の視野中心から消火に有効な許容範囲として予め定める所定範囲内に位置するように電動雲台13を制御すれば、消火用レーザ装置11を火源基底部FB方向に略指向させることができ、消火に十分な範囲で火源基底部FB方向に照準させることができる。
【0029】
図3は、消火装置1としては図1に示した例のものを用いると共に、自火報に連動して設備を起動させる場合の消火設備Eの待機状態から消火終了までの動作の流れを示したフロー図である。
【0030】
同図に示したように、平常時、消火設備Eは待機状態にあるが(S1)、自火報の発報の有無を判別するようになっている(S2)。火災発報があると、即ち、火災信号を受信すると、消火装置1が起動し(S3)、電動雲台13を制御して、赤外線カメラ12をオートパン動作させ(S4)、炎の検出の有無の判別(S5)、即ち、火源の有無を判別する火災探査動作を行う。炎を検出したら、電動雲台13のオートパン動作を停止し(S6)、炎の座標の算出(S7)、即ち、火源方向の座標の算出をする。炎の座標を算出したら、再度、電動雲台13を制御して、炎が赤外線カメラ12の視野中心位置となるようにして(S8)、炎基底部の座標の算出(S9)、即ち、火源基底部の座標の算出をした上で、その基底部を赤外線カメラ12の視野中心位置となるようにし(S10)、基底部が赤外線カメラ12の視野中心位置にあるか否かを両者間の距離が前記所定範囲にあるか否かで判別する(S11)。火源基底部の座標の算出をした上で、これが赤外線カメラ12の視野中心位置から前記所定範囲を超えて離れている場合は、再び電動雲台13を制御して、その基底部を赤外線カメラ12の視野中心となるようにし、そして、両者間の距離が前記所定範囲内にあれば、赤外線カメラ12の指向方向は火源基底部の方向に一致すると共に、消火用レーザ装置11の指向方向もその方向に一致し、消火用レーザ装置11が消火に十分な範囲で火源基底部FB方向に照準しているものとし、消火用レーザ装置11を動作させて、消火を開始させることになるが(S12)、具体的には、消火用レーザ装置11から火源基底部FB方向にレーザ光を発し、火源基底部FB直下にある物質(例えば、床等。)に照射し、そこにブラスト波(爆風)を生じさせ、それにより火源Fの炎を直下から吹き飛ばして消火することになる。消火を開始したら、所定時間の経過の有無を判別し(S13)、所定時間が経過後は、レーザ光による破壊が過度にならないように、その照射を停止し、一旦消火動作を停止する(S14)。消火動作を一旦停止したら、再度、赤外線カメラ12により炎の検出の有無を判別(S15)、即ち、火源の有無を判別する。そこで、炎を検出した場合は、炎の座標の算出のステップ(S7)まで戻り、それ以降の動作を繰り返し行い、炎を検出しなかった場合は、管理者が火災の鎮火を確認し、鎮火を確認できれば、消火作業を終了させることになるが、その判別を復旧操作の有無を判別することにより行う(S16)。即ち、復旧操作がなかった場合は、火災の鎮火が確認できなかったものとして、消火開始後、一旦それを停止した後の炎の検出の有無を判別するステップ(S15)まで戻り、それ以降の動作を繰り返し行い、復旧操作があった場合は、火災の鎮火が確認できたものとして、消火を終了させる(S17)ことになる。
【0031】
前記のように、消火設備Eは、消火用レーザ装置11を用い、直線状に進行するレーザ光によって消火をするものであり、火源基底部FBの方向さえ特定できれば、その方向に消火用レーザ装置11の指向方向を合わせるだけで、正確に、火源基底部FBにある物質にレーザ光を照射して消火をすることができるようになっており、簡単な制御で、正確な消火をすることができるようになっている。
【0032】
ここで、消火装置1の消火用レーザ装置11について説明する。消火用レーザ装置11としては、Nd:YAGレーザやCO2レーザやガラスレーザ等の核融合実験で用いられるような繰り返し発振型高出力レーザを用いることができ、火災消火に有効なブラスト波を生じさせることができる程度の単位体積、単位時間当たりのエネルギ密度が得られるようにする。例えば、波長532nm(Nd:YAGレーザの第2高調波)とした場合は、1010〜1011W/cm2以上のエネルギー密度で、3〜10nsのパルスを繰り返し照射する。詳しくは、社団法人日本火災学会発行の平成17年度日本火災学研究発表会概要集に記載されているので、ここでの説明は省略する。
【0033】
以上、図1乃至図3に基づき、この発明の消火設備Eの構成の一例を説明したが、その構成は前記に限られる訳ではない。
【0034】
例えば、消火装置1において、消火用レーザ装置11と赤外線カメラ12の電動雲台13上での支持方法については、図1に示した例のように、消火用レーザ11上に赤外線カメラ12を固定して設けし、両者を一体のものとして水平軸回りの支持台13bに支持するのに代えて、図4乃至図7に示した例のように、消火用レーザ装置11と赤外線カメラ12とを上下に回動可能に支持する支持台13d、13d上に別々に支持するようにしてもよく、具体的には、図4の分解図に示したように、回転台13aに同一の水平軸X上に位置はするものの、別々の回動軸を構成する2つの水平回動軸部13c、13cを設け、その2つの水平回動軸部13c、13cの一方には消火用レーザ装置11を固定すると共に、他方には赤外線カメラ12を固定して、消火用レーザ装置11と赤外線カメラ12とを同一の水平軸X回りにではあるものの別々に逆方向に回動R2、R3可能に支持するようにしてもよい。
【0035】
この例の場合の平常時の待機状態から赤外線カメラ12による火源基底部の探査を経て消火用レーザ装置11を火源基底部FB方向に指向制御する際の動作について説明する。
【0036】
図5に示したように、赤外線カメラ12と消火用レーザ装置11との指向方向A1、A2は何れも水平方向に向いているが、互いに反対の方向を向くように電動雲台13の支持台13d、13d上に支持されており、平常時の待機状態では、この向きで両者の指向方向は維持されている。火災時、電動雲台13の垂直軸Y回りの回転台13aの回動R1動作と(図4)、支持台13d、13dにおける赤外線カメラ12側の水平回動軸部13cの回動R2動作とにより、赤外線カメラ12の指向方向のパン角及びチルト角を変化させて、その視野中心に火源基底部FBを位置させ、赤外線カメラ12の指向方向A1を火源基底部FB方向に向けることになるが、この際、図6に示したように、赤外線カメラ12の指向方向A1の水平位置Lからのチルト角θtと同じチルト角θtで消火用レーザ装置11の指向方向A2のチルト角も変化させる。そして、電動雲台13の回転台13aの回動R1動作により、消火用レーザ装置11の指向方向A2を水平方向に反転、即ち、パン角を180度変化させる。そうすることで、図7に示したように、消火用レーザ装置11の指向方向は火源基底部FB方向に向くこととなる。
【0037】
従って、この例によれば、消火用レーザ装置11の指向方向を赤外線カメラ12によって検出した火源基底部FB方向に正確に向けることができる。
【0038】
又、例えば、図1乃至3に示した例においては、消火設備Eを自火報に連動して起動するものとしているが、それに代えて、図示は省略するが、消火設備Eを人感センサによる人の感知に連動して起動するものとすることもできる。そのようにすることで、消火設備Eを放火に対処可能なものとすることができる。
【0039】
即ち、防火区画P内への侵入者を人感センサが検知したら、それに基づいて消火設備Eを起動させて、火源探査動作をさせるようにし、侵入者が放火をしようと火種に点火した段階でそれを検知させて、それに対して消火動作をさせるようにし、放火が火災に至らない段階で早期に消火が可能なものとすることができる。
【0040】
更に、例えば、消火設備Eを複数の消火装置1を備えるものとすることもでき、その場合に、火源Fに最も近い消火装置1を選択し、その選択した消火装置1に消火を行わせるようにすることもできる。
【0041】
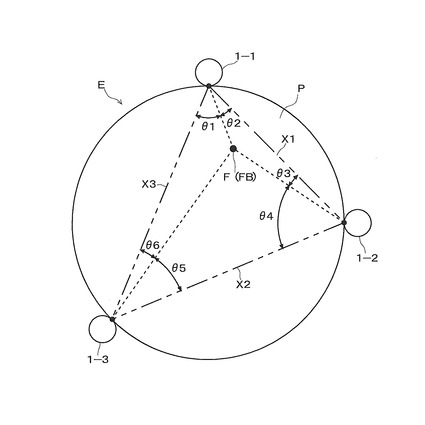
即ち、図8は、消火設備Eの防護区画Pに複数の消火装置1として、消火装置1−1、1−2、1−3の3つを設けた場合の配置を平面視で示したものであるが、火源Fが図に示した位置にある場合に、それに最も近い消火装置1−1を選択して、消火装置1−1に消火を行わせるようにすることができる。
【0042】
具体的には、例えば、消火装置1−1、1−2、1−3のそれぞれについて、他の消火装置との間を結ぶ直線を基準軸X1、X2、X3として記憶する記憶手段を消火装置制御盤3に設けてそれを記憶させておき、消火装置1−1、1−2、1−3の3つが火源Fを検出し、その火源Fの基底部FBの方向を特定した場合、それら消火装置1−1、1−2、1−3について、基準軸X1、X2、X3を基準として、火源Fの基底部の方向の相対方位角θ1〜θ6を求める。ここで、それぞれの相対方位角θ1〜θ6は基準軸X1、X2、X3とそれぞれの赤外線カメラ12の指向方向との間のパン角を回転台13aの旋回角を求めることで得ることができる。そして、消火装置1−1、1−2、1−3を総当りで、比較対照のものとの間の基準軸を基準とする相対方位角同士の大小を互いに比較し、他の何れの消火装置に対しても比較した相対対方位角が大きい消火装置を選択するように演算する演算手段を消火装置制御盤3に備える。即ち、この例においては、消火装置1−1と1−2は相対方位角θ2とθ3の大小を比較し、消火装置1−1と1−3は相対方位角θ1とθ6の大小を比較し、消火装置1−2と1−3は相対方位角θ4とθ5の大小を比較した上で、消火装置1−2と1−3の何れに対しても比較した相対方位角が大きい消火装置1−1を消火装置制御盤3が選択する。ここで、他の何れの消火装置に対しても比較した相対対方位角が大きいということは、相対方位角を決定する火源Fの基底部FBまでの距離が水平方向において最も短い、即ち、その消火装置が火源Fに水平方向において最も近いことを意味する。そして、前記のようにして選択した消火装置1−1に火源Fに対する消火を行わせるよう制御する。これにより、複数の消火装置1−1、1−21−3から火源Fに最も近いものを選択し、その消火装置1−1に消火を行わせるようにすることができる。以上の説明は、平面的に消火装置1−1、1−2、1−3が配置された場合の説明であり、一般に防護区画Pを複数の消火装置で防護する場合は消火装置を水平展開させて配設することが殆どであり、通常は以上の説明の範囲で実施できる。これらの消火装置の高低差が大きい位置に配設された場合には、垂直方向も加味して立体的に角度の比較を行えば良い。
【0043】
尚、複数の消火装置1から火源Fに最も近いものを選択する技術として、より具体的には、特許第4016364号公報及び特許第4170835号公報に開示のものや、別途出願済みの特願2010−77153の明細書等に記載のものを利用することができる。
【0044】
前記のように、火源Fを検出した複数の消火装置1からその火源Fに最も近いものを選択して消火をさせるようにすることで、火源Fから遠い消火装置1の赤外線カメラ12が撮影した赤外線画像では、火源Fの炎が例えば1画素程の点にしか見えないようなものであっても、火源Fから近い消火装置1の赤外線カメラ12が撮影した赤外線画像では複数の画素で炎を捉えることができ、その基底部の方向を正確に検出することができる。又、消火用レーザ装置11から照射するレーザ光の方向と火源基底部FB方向との間に誤差があったとしても、火源Fに最も近い消火装置1であれば、火源基底部FBに対する命中の誤差としてそれを最小に抑えることができる。
【符号の説明】
【0045】
A1,A2:指向方向 C:防災センタ E:消火設備 F:火源
FB:火源基底部 L:水平位置 P:防護区画 R1〜R3:回動
X:水平軸 X1〜X3:基準軸 Y:垂直軸 θt:チルト角
θ1〜θ6:相対方位角 1:消火装置 1−1〜1−3:消火装置
2:架台 3:消火装置制御盤 4:火災受信機 11:消火用レーザ装置
12:赤外線カメラ 13:電動雲台 13a:回転台 13b:支持台
13c:水平回動軸部 13d:支持台 41:火災感知器(投光側)
42:火災感知器(受光側)
【技術分野】
【0001】
この発明は、消火設備に関し、より詳細にはレーザ消火装置を用いた自動消火設備に関する。
【背景技術】
【0002】
赤外線式火災感知器で火源位置を特定し、火源位置に向けて放水銃等の可動式ノズルから放水して消火をする装置が実用化されている。
【0003】
しかしながら、火源位置を特定するには、防護対象の建築物等の形状等の地図情報のデータを記憶しておき、検出した火源方向の情報等を用いた複雑な演算処理、具体的には、火源方向の延長線上にある建築物(地図情報によって情報が与えられる)との交点を火源位置と判断する等の複雑な演算処理が必要であった(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平06−000229号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記のように大きなデータを記憶し、複雑な演算処理が必要なのは、炎から発せられる赤外線は直進して検出されるのに対して、可動式ノズル等から消火のために放出される消火用水は放物線状の軌跡を描くという違いがあり、火源方向に放水しても消火用水の射程(着地点)の制御を行わなければ、放出した消火用水を正確には火源に命中させられないことに原因がある。
【0006】
この発明は、前記の事情に鑑み、制御が簡単でありながら、正確な消火をすることができる消火設備を提供することを目的とする。
【課題を解決するための手段】
【0007】
この発明は、消火用高出力パルスレーザと、火源基底部方向特定手段と、それらの指向方向を上下左右に変化させる指向方向変化手段とを有する消火装置を備えており、前記火源基底部方向特定手段の動作と、前記指向方向変化手段の動作とにより、火源を検出すると共に、火源基底部の方向を特定し、その特定した方向に前記消火用高出力パルスレーザの指向方向を合わせ、前記消火用高出力パルスレーザの動作により、火源基底部に向けてレーザ光を発射して、火源基底部の直下にある物質にレーザ光を照射し、そこにブラスト波を駆動して、火源の炎を吹き飛ばして消火をするように構成されており、そして、前記消火用高出力パルスレーザの動作と、前記火源基底部方向特定手段の動作と、前記指向方向特定手段の動作とを制御する制御装置を更に備えていることを特徴とする消火設備である。
【0008】
又、この発明は、前記指向方向変化手段は、前記消火用高出力パルスレーザと、前記火源基底部特定手段とを上下方向に回動可能に支持すると共に、左右方向に回動可能に支持する回動支持機構であることを特徴とする消火設備である。
【0009】
又、この発明は、前記消火装置は、平常時には待機状態にあり、火災時には、火災感知手段による火災の感知に連動して起動するものであることを特徴とする消火設備である。
【0010】
又、この発明は、前記消火装置は、平常時には待機状態にあり、人感センサによる人の感知に連動して起動するものであることを特徴とする消火設備である。
【0011】
又、この発明は、前記消火装置を複数備え、前記制御装置は、それら複数の消火装置のそれぞれについて、他の消火装置との間を結ぶ直線を基準軸として記憶する記憶手段を有するものであると共に、火源を検出し、火源基底部の方向を特定した複数の消火装置のそれぞれについて、前記基準軸を基準として、火源基底部の方向の相対方位角を求め、それら求めた相対方位角を互いに比較して、火源に近い消火装置を選択するように演算する演算手段を有するものであり、それにより、火源検出し、火源基底部の方向を特定した複数の消火装置から、火源に最も近い消火装置を選択し、その消火装置が消火の動作をするように制御するものであることを特徴とする消火設備である。
【発明の効果】
【0012】
この発明は、消火用高出力パルスレーザを用い、直線状に進行するレーザ光によって消火をするものであり、火源基底部の方向さえ特定できれば、その方向に消火用高出力パルスレーザの指向方向を合わせるだけで、正確に、火源基底部の直下にある物質にレーザ光を照射して消火をすることができる。
【0013】
即ち、この発明は、放物線を描いて進行する消火水によって消火をする従来例とは異なり、火源の位置までは特定する必要がなく、設置場所の地図情報等の大きなデータを記憶しなくとも、又、複雑な演算をしなくとも、正確な消火をすることができる。
【0014】
従って、この発明によれば、制御が簡単でありながら、正確な消火をすることができる消火設備を得ることができる。
【図面の簡単な説明】
【0015】
【図1】この発明の消火設備の一構成例を示し、設置状態にある消火装置の側面図を含む構成図であり、火災時、消火装置の消火用高出力パルスレーザが火源基底部方向を指向している状態を示したものである。
【図2】同上の消火設備のシステム構成の一例を示したシステムブロック図である。
【図3】同上の消火設備の動作の流れの一例を示した動作フロー図である。
【図4】同上の消火設備の消火装置の他の構成例を示した分解図である。
【図5】同上の斜視図であり、平常時、待機している際の状態を示したものである。
【図6】同上の斜視図であり、火災時、火源基底部方向特定手段である赤外線カメラが火源基底部方向を指向している際の状態を示したものである。
【図7】同上の斜視図であり、火災時、高出力パルスレーザが火源基底部方向を指向している際の状態を示したものである。
【図8】この発明の消火設備における消火装置の選択をする例を説明するための図であり、防護領域に対する複数の消火装置の配置等を平面視で示した図である。
【発明を実施するための形態】
【0016】
この発明の消火設備の実施形態を図1乃至8に基づき説明する。
【0017】
先ず、図1乃至3に基づき、この発明の消火設備の実施形態の一例を自火報(自動火災報知設備)と連動して起動する消火設備Eに適用する場合を例に説明する。
【0018】
図1に示したように、消火設備Eは消火装置1を備えているが、消火装置1は、消火用高出力レーザの一例である消火用レーザ装置11と、火源基底部方向特定手段の一例である赤外線カメラ12と、それらの指向方向を変化させる指向方向変化手段の一例であり、それらを左右方向に回動可能に支持すると共に、上下方向に回動可能に支持する回動支持機構の一例であり、垂直軸回りに回動可能な回転台13aとその上に設けられた水平軸回りに回動可能な支持台13bとからなる電動雲台13等を有しており、電動雲台13がそれを支持する架台2によりその支持台13b上に支持されている消火用レーザ装置11と赤外線カメラ12とが防護範囲(火源Fを含む)を俯瞰できるような位置に設けられている。尚、図2に基づいて、次に詳細に説明するように、この消火装置1は制御装置の一例である防災センタC内の消火装置制御盤3に接続されている。
【0019】
この消火設備Eは自動火災報知設備(以下自火報という)の火災感知手段による火災の感知に連動して起動するよう構成されており、即ち、図2に示したように、防護区画P内には火災感知手段の一例として、光電式分離型感知器を構成する一対の火災感知器41(投光部側)と同42(受光部側)とが設けられており、それら火災感知器41、42より、両者間の煙による減光で火災を感知することができるようになっており、又、消火装置1の防護範囲を監視範囲として火災を感知することができるようになっている。尚、火災感知手段としては、他の種類のものを用いることもでき、防護対象とする建物等に応じて想定される火災の感知に最適のものを用いることができる。
【0020】
火災感知器41、42は、防災センタC(消火設備Eを全体的に制御する機器等が設けられている。)に配設された火災受信機4に接続されており、それにより自火報を構成しており、火災感知器41、42が防護区画Pにおいて発生する火災を感知すると、火災受信機4が火災警報を発するようになっている。そして、火災受信機4は火災信号を消火装置制御盤3に送出するようになっており、消火設備Eは自火報に連動して起動可能になっている。ここで、図2においては、消火設備Eとして、1つの防護区画P中の構成しか示していないが、消火設備Eを複数の防護区画を防護するものとしてもよいことは勿論であり、複数の防護区画に対応して、消火装置1を複数備えると共に、自火報を構成する火災感知器41、42を複数組備えるものとしてもよいことは勿論である。
【0021】
消火装置制御盤3は、図示はしないが、画像処理装置を含む制御装置を有しており、消火用レーザ装置11と、赤外線カメラ12、電動雲台13等の動作を制御することができるようになっており、火災受信機4から火災信号を受信すると、消火用レーザ装置11を火源Fに照準させて火災消火するためにそれらの動作を制御することができるようになっている。
【0022】
即ち、消火装置制御盤3は、前記の火災信号を受信すると、先ず、火源を検出するための火源探査動作を行うように制御するようになっているが、具体的には、電動雲台13を防護区画Pの火源検出を行えるよう建築物等に応じて適宜決定される所定の角度(又は角度の範囲)で左右方向に回転させて、赤外線カメラ122にその範囲を走査するオートパン動作をさせるようになっている。これにより、赤外線カメラ12は水平方向の広い範囲を走査することとができるようになっている。尚、垂直方向も広く探査することができるように、赤外線カメラ12のレンズとして広角(例えば50度)のものを用いることができる。ここで、赤外線カメラのレンズを広角にすると、俯角(上下角)を固定したままオートパンすることによって広域を素早く監視することができるが、周辺視野はレンズの収差で画像が歪む。最終的に最も収差の少ない視野中心で照準判断するので、収差による照準誤差の影響がないように制御される。
【0023】
次いで、消火装置制御盤3は、赤外線カメラ12が前記のように動作して得た赤外線画像信号を受信して、内部の画像処理装置によって所定のレベル以上の高温点を検出するように制御し、高温点を検出したら、そこを火源として検出し、電動雲台13の回転を停止すると共に、検出した火源について、その方向を座標として算出するようになっており、又、その座標値に基づき、火源の方向が赤外線カメラ12のほぼ正面方向になるように電動雲台13を上下左右に回転制御すると共に、画像処理装置によって、検出した火源の赤外線画像信号から火源の基底部FBの方向を座標として得るよう演算するようになっている。
【0024】
ここで、火源基底部FBとは、赤外線カメラ12が検出した火源Fの赤外線画像における炎部分の最下部を意味する。すなわち、火源Fの下方にある可燃物が燃焼して炎が立ち上っている部分でもある。したがって、火源基底部FBに消火用レーザ装置11を照準させ、前記照準位置に消火用レーザ装置11よりレーザー光を照射してブラスト波を発生させると、前記可燃物から熱分解によって放出されて燃焼している可燃ガスを吹き飛ばすことができるので、前記可燃ガスが燃えることによって生じている火源Fの炎を消火することができる。
【0025】
なお、火源基底部FBの座標(ここでは二次元の直交座標を用いて説明する)は、火源Fを補足した赤外線カメラ12からの赤外線画像信号を消火装置制御盤3に備わる図示しない画像処理装置によって画像処理し、例えば以下のように画像処理(演算)することによって、求めることができる。
【0026】
まず、赤外線カメラ12から送出される赤外線画像信号に基づいた火源Fの赤外線画像において、予め定めた所定温度値以上を示している画素を抽出し、前記所定温度以上の部分を切り出す二値化処理を行い、前記炎の二次元形状を特定する。次に、前記炎の二次元形状の輪郭線を抽出し、該輪郭線において最も下方に位置する画素を求める。ここに火源基底部FBの高さ方向の座標であるY座標の値yoと横方向の座標であるxoが定まるが、該当する画素が横方向に連続して複数存在する場合は、その横方向の中央に位置する画素の横方向の座標であるX座標の値を以て火源基底部FBの横方向の座標であるX座標の値xoとすることによって、火源基底部FBの座標xo,yoが求まる。
【0027】
そして、消火装置制御盤3は、前記のようにして得た火源基底部FB方向の座標値に基づき、再度電動雲台3を上下左右に回転制御して、赤外線カメラ12の視野中心に火源基底部FBが位置するように制御し、火源基底部FBが赤外線カメラ12の視野中心に位置したことを確認したときは、赤外線カメラ12と同一方向を指向している消火用レーザ装置1は火源基底部FB方向に向かうので、消火用レーザ装置11を火源基底部FB方向に照準させるようになっている。
【0028】
尚、図1は、消火装置1において、消火用レーザ装置11と赤外線カメラ12の指向方向変化手段として、電動雲台13を用い、その電動雲台13上に消火用レーザ装置11を固定して載置すると共に、それと指向方向を一致させつつ、消火用レーザ11装置上に赤外線カメラ12を固定して載置する例を示したものとなっている。この例の場合、消火用レーザ装置11と赤外線カメラ12の指向方向が一致しているので、赤外線カメラ12を火源基底部FB方向に正確に指向させれば、消火用レーザ装置11も火源基底部FB方向に指向させることができる。これにより、図1の消火装置1の例においては、消火用レーザ装置11の火源基底部FB方向への指向制御は、赤外線カメラ12の指向制御により行うことができ、即ち、火源基底部FB方向の座標値を前記のようにして得たら、火源基底部FB方向の座標値が赤外線カメラ12の視野中心から消火に有効な許容範囲として予め定める所定範囲内に位置するように電動雲台13を制御すれば、消火用レーザ装置11を火源基底部FB方向に略指向させることができ、消火に十分な範囲で火源基底部FB方向に照準させることができる。
【0029】
図3は、消火装置1としては図1に示した例のものを用いると共に、自火報に連動して設備を起動させる場合の消火設備Eの待機状態から消火終了までの動作の流れを示したフロー図である。
【0030】
同図に示したように、平常時、消火設備Eは待機状態にあるが(S1)、自火報の発報の有無を判別するようになっている(S2)。火災発報があると、即ち、火災信号を受信すると、消火装置1が起動し(S3)、電動雲台13を制御して、赤外線カメラ12をオートパン動作させ(S4)、炎の検出の有無の判別(S5)、即ち、火源の有無を判別する火災探査動作を行う。炎を検出したら、電動雲台13のオートパン動作を停止し(S6)、炎の座標の算出(S7)、即ち、火源方向の座標の算出をする。炎の座標を算出したら、再度、電動雲台13を制御して、炎が赤外線カメラ12の視野中心位置となるようにして(S8)、炎基底部の座標の算出(S9)、即ち、火源基底部の座標の算出をした上で、その基底部を赤外線カメラ12の視野中心位置となるようにし(S10)、基底部が赤外線カメラ12の視野中心位置にあるか否かを両者間の距離が前記所定範囲にあるか否かで判別する(S11)。火源基底部の座標の算出をした上で、これが赤外線カメラ12の視野中心位置から前記所定範囲を超えて離れている場合は、再び電動雲台13を制御して、その基底部を赤外線カメラ12の視野中心となるようにし、そして、両者間の距離が前記所定範囲内にあれば、赤外線カメラ12の指向方向は火源基底部の方向に一致すると共に、消火用レーザ装置11の指向方向もその方向に一致し、消火用レーザ装置11が消火に十分な範囲で火源基底部FB方向に照準しているものとし、消火用レーザ装置11を動作させて、消火を開始させることになるが(S12)、具体的には、消火用レーザ装置11から火源基底部FB方向にレーザ光を発し、火源基底部FB直下にある物質(例えば、床等。)に照射し、そこにブラスト波(爆風)を生じさせ、それにより火源Fの炎を直下から吹き飛ばして消火することになる。消火を開始したら、所定時間の経過の有無を判別し(S13)、所定時間が経過後は、レーザ光による破壊が過度にならないように、その照射を停止し、一旦消火動作を停止する(S14)。消火動作を一旦停止したら、再度、赤外線カメラ12により炎の検出の有無を判別(S15)、即ち、火源の有無を判別する。そこで、炎を検出した場合は、炎の座標の算出のステップ(S7)まで戻り、それ以降の動作を繰り返し行い、炎を検出しなかった場合は、管理者が火災の鎮火を確認し、鎮火を確認できれば、消火作業を終了させることになるが、その判別を復旧操作の有無を判別することにより行う(S16)。即ち、復旧操作がなかった場合は、火災の鎮火が確認できなかったものとして、消火開始後、一旦それを停止した後の炎の検出の有無を判別するステップ(S15)まで戻り、それ以降の動作を繰り返し行い、復旧操作があった場合は、火災の鎮火が確認できたものとして、消火を終了させる(S17)ことになる。
【0031】
前記のように、消火設備Eは、消火用レーザ装置11を用い、直線状に進行するレーザ光によって消火をするものであり、火源基底部FBの方向さえ特定できれば、その方向に消火用レーザ装置11の指向方向を合わせるだけで、正確に、火源基底部FBにある物質にレーザ光を照射して消火をすることができるようになっており、簡単な制御で、正確な消火をすることができるようになっている。
【0032】
ここで、消火装置1の消火用レーザ装置11について説明する。消火用レーザ装置11としては、Nd:YAGレーザやCO2レーザやガラスレーザ等の核融合実験で用いられるような繰り返し発振型高出力レーザを用いることができ、火災消火に有効なブラスト波を生じさせることができる程度の単位体積、単位時間当たりのエネルギ密度が得られるようにする。例えば、波長532nm(Nd:YAGレーザの第2高調波)とした場合は、1010〜1011W/cm2以上のエネルギー密度で、3〜10nsのパルスを繰り返し照射する。詳しくは、社団法人日本火災学会発行の平成17年度日本火災学研究発表会概要集に記載されているので、ここでの説明は省略する。
【0033】
以上、図1乃至図3に基づき、この発明の消火設備Eの構成の一例を説明したが、その構成は前記に限られる訳ではない。
【0034】
例えば、消火装置1において、消火用レーザ装置11と赤外線カメラ12の電動雲台13上での支持方法については、図1に示した例のように、消火用レーザ11上に赤外線カメラ12を固定して設けし、両者を一体のものとして水平軸回りの支持台13bに支持するのに代えて、図4乃至図7に示した例のように、消火用レーザ装置11と赤外線カメラ12とを上下に回動可能に支持する支持台13d、13d上に別々に支持するようにしてもよく、具体的には、図4の分解図に示したように、回転台13aに同一の水平軸X上に位置はするものの、別々の回動軸を構成する2つの水平回動軸部13c、13cを設け、その2つの水平回動軸部13c、13cの一方には消火用レーザ装置11を固定すると共に、他方には赤外線カメラ12を固定して、消火用レーザ装置11と赤外線カメラ12とを同一の水平軸X回りにではあるものの別々に逆方向に回動R2、R3可能に支持するようにしてもよい。
【0035】
この例の場合の平常時の待機状態から赤外線カメラ12による火源基底部の探査を経て消火用レーザ装置11を火源基底部FB方向に指向制御する際の動作について説明する。
【0036】
図5に示したように、赤外線カメラ12と消火用レーザ装置11との指向方向A1、A2は何れも水平方向に向いているが、互いに反対の方向を向くように電動雲台13の支持台13d、13d上に支持されており、平常時の待機状態では、この向きで両者の指向方向は維持されている。火災時、電動雲台13の垂直軸Y回りの回転台13aの回動R1動作と(図4)、支持台13d、13dにおける赤外線カメラ12側の水平回動軸部13cの回動R2動作とにより、赤外線カメラ12の指向方向のパン角及びチルト角を変化させて、その視野中心に火源基底部FBを位置させ、赤外線カメラ12の指向方向A1を火源基底部FB方向に向けることになるが、この際、図6に示したように、赤外線カメラ12の指向方向A1の水平位置Lからのチルト角θtと同じチルト角θtで消火用レーザ装置11の指向方向A2のチルト角も変化させる。そして、電動雲台13の回転台13aの回動R1動作により、消火用レーザ装置11の指向方向A2を水平方向に反転、即ち、パン角を180度変化させる。そうすることで、図7に示したように、消火用レーザ装置11の指向方向は火源基底部FB方向に向くこととなる。
【0037】
従って、この例によれば、消火用レーザ装置11の指向方向を赤外線カメラ12によって検出した火源基底部FB方向に正確に向けることができる。
【0038】
又、例えば、図1乃至3に示した例においては、消火設備Eを自火報に連動して起動するものとしているが、それに代えて、図示は省略するが、消火設備Eを人感センサによる人の感知に連動して起動するものとすることもできる。そのようにすることで、消火設備Eを放火に対処可能なものとすることができる。
【0039】
即ち、防火区画P内への侵入者を人感センサが検知したら、それに基づいて消火設備Eを起動させて、火源探査動作をさせるようにし、侵入者が放火をしようと火種に点火した段階でそれを検知させて、それに対して消火動作をさせるようにし、放火が火災に至らない段階で早期に消火が可能なものとすることができる。
【0040】
更に、例えば、消火設備Eを複数の消火装置1を備えるものとすることもでき、その場合に、火源Fに最も近い消火装置1を選択し、その選択した消火装置1に消火を行わせるようにすることもできる。
【0041】
即ち、図8は、消火設備Eの防護区画Pに複数の消火装置1として、消火装置1−1、1−2、1−3の3つを設けた場合の配置を平面視で示したものであるが、火源Fが図に示した位置にある場合に、それに最も近い消火装置1−1を選択して、消火装置1−1に消火を行わせるようにすることができる。
【0042】
具体的には、例えば、消火装置1−1、1−2、1−3のそれぞれについて、他の消火装置との間を結ぶ直線を基準軸X1、X2、X3として記憶する記憶手段を消火装置制御盤3に設けてそれを記憶させておき、消火装置1−1、1−2、1−3の3つが火源Fを検出し、その火源Fの基底部FBの方向を特定した場合、それら消火装置1−1、1−2、1−3について、基準軸X1、X2、X3を基準として、火源Fの基底部の方向の相対方位角θ1〜θ6を求める。ここで、それぞれの相対方位角θ1〜θ6は基準軸X1、X2、X3とそれぞれの赤外線カメラ12の指向方向との間のパン角を回転台13aの旋回角を求めることで得ることができる。そして、消火装置1−1、1−2、1−3を総当りで、比較対照のものとの間の基準軸を基準とする相対方位角同士の大小を互いに比較し、他の何れの消火装置に対しても比較した相対対方位角が大きい消火装置を選択するように演算する演算手段を消火装置制御盤3に備える。即ち、この例においては、消火装置1−1と1−2は相対方位角θ2とθ3の大小を比較し、消火装置1−1と1−3は相対方位角θ1とθ6の大小を比較し、消火装置1−2と1−3は相対方位角θ4とθ5の大小を比較した上で、消火装置1−2と1−3の何れに対しても比較した相対方位角が大きい消火装置1−1を消火装置制御盤3が選択する。ここで、他の何れの消火装置に対しても比較した相対対方位角が大きいということは、相対方位角を決定する火源Fの基底部FBまでの距離が水平方向において最も短い、即ち、その消火装置が火源Fに水平方向において最も近いことを意味する。そして、前記のようにして選択した消火装置1−1に火源Fに対する消火を行わせるよう制御する。これにより、複数の消火装置1−1、1−21−3から火源Fに最も近いものを選択し、その消火装置1−1に消火を行わせるようにすることができる。以上の説明は、平面的に消火装置1−1、1−2、1−3が配置された場合の説明であり、一般に防護区画Pを複数の消火装置で防護する場合は消火装置を水平展開させて配設することが殆どであり、通常は以上の説明の範囲で実施できる。これらの消火装置の高低差が大きい位置に配設された場合には、垂直方向も加味して立体的に角度の比較を行えば良い。
【0043】
尚、複数の消火装置1から火源Fに最も近いものを選択する技術として、より具体的には、特許第4016364号公報及び特許第4170835号公報に開示のものや、別途出願済みの特願2010−77153の明細書等に記載のものを利用することができる。
【0044】
前記のように、火源Fを検出した複数の消火装置1からその火源Fに最も近いものを選択して消火をさせるようにすることで、火源Fから遠い消火装置1の赤外線カメラ12が撮影した赤外線画像では、火源Fの炎が例えば1画素程の点にしか見えないようなものであっても、火源Fから近い消火装置1の赤外線カメラ12が撮影した赤外線画像では複数の画素で炎を捉えることができ、その基底部の方向を正確に検出することができる。又、消火用レーザ装置11から照射するレーザ光の方向と火源基底部FB方向との間に誤差があったとしても、火源Fに最も近い消火装置1であれば、火源基底部FBに対する命中の誤差としてそれを最小に抑えることができる。
【符号の説明】
【0045】
A1,A2:指向方向 C:防災センタ E:消火設備 F:火源
FB:火源基底部 L:水平位置 P:防護区画 R1〜R3:回動
X:水平軸 X1〜X3:基準軸 Y:垂直軸 θt:チルト角
θ1〜θ6:相対方位角 1:消火装置 1−1〜1−3:消火装置
2:架台 3:消火装置制御盤 4:火災受信機 11:消火用レーザ装置
12:赤外線カメラ 13:電動雲台 13a:回転台 13b:支持台
13c:水平回動軸部 13d:支持台 41:火災感知器(投光側)
42:火災感知器(受光側)
【特許請求の範囲】
【請求項1】
消火用高出力パルスレーザと、火源基底部方向特定手段と、それらの指向方向を上下左右に変化させる指向方向変化手段とを有する消火装置を備えており、
前記火源基底部方向特定手段の動作と、前記指向方向変化手段の動作とにより、火源を検出すると共に、火源基底部の方向を特定し、その特定した方向に前記消火用高出力パルスレーザの指向方向を合わせ、前記消火用高出力パルスレーザの動作により、火源基底部に向けてレーザ光を発射して、火源基底部の直下にある物質にレーザ光を照射し、そこにブラスト波を駆動して、火源の炎を吹き飛ばして消火をするように構成されており、
そして、前記消火用高出力パルスレーザの動作と、前記火源基底部方向特定手段の動作と、前記指向方向特定手段の動作とを制御する制御装置を更に備えていることを特徴とする消火設備。
【請求項2】
前記指向方向変化手段は、前記消火用高出力パルスレーザと、前記火源基底部特定手段とを上下方向に回動可能に支持すると共に、左右方向に回動可能に支持する回動支持機構であることを特徴とする請求項1記載の消火設備。
【請求項3】
前記消火装置は、平常時には待機状態にあり、火災時には、火災感知手段による火災の感知に連動して起動するものであることを特徴とする請求項1又は2記載の消火設備。
【請求項4】
前記消火装置は、平常時には待機状態にあり、人感センサによる人の感知に連動して起動するものであることを特徴とする請求項1又は2記載の消火設備。
【請求項5】
前記消火装置を複数備え、前記制御装置は、それら複数の消火装置のそれぞれについて、他の消火装置との間を結ぶ直線を基準軸として記憶する記憶手段を有するものであると共に、火源を検出し、火源基底部の方向を特定した複数の消火装置のそれぞれについて、前記基準軸を基準として、火源基底部の方向の相対方位角を求め、それら求めた相対方位角を互いに比較して、火源に近い消火装置を選択するように演算する演算手段を有するものであり、それにより、火源検出し、火源基底部の方向を特定した複数の消火装置から、火源に最も近い消火装置を選択し、その消火装置が消火の動作をするように制御するものであることを特徴とする請求項1乃至4の何れか記載の消火設備。
【請求項1】
消火用高出力パルスレーザと、火源基底部方向特定手段と、それらの指向方向を上下左右に変化させる指向方向変化手段とを有する消火装置を備えており、
前記火源基底部方向特定手段の動作と、前記指向方向変化手段の動作とにより、火源を検出すると共に、火源基底部の方向を特定し、その特定した方向に前記消火用高出力パルスレーザの指向方向を合わせ、前記消火用高出力パルスレーザの動作により、火源基底部に向けてレーザ光を発射して、火源基底部の直下にある物質にレーザ光を照射し、そこにブラスト波を駆動して、火源の炎を吹き飛ばして消火をするように構成されており、
そして、前記消火用高出力パルスレーザの動作と、前記火源基底部方向特定手段の動作と、前記指向方向特定手段の動作とを制御する制御装置を更に備えていることを特徴とする消火設備。
【請求項2】
前記指向方向変化手段は、前記消火用高出力パルスレーザと、前記火源基底部特定手段とを上下方向に回動可能に支持すると共に、左右方向に回動可能に支持する回動支持機構であることを特徴とする請求項1記載の消火設備。
【請求項3】
前記消火装置は、平常時には待機状態にあり、火災時には、火災感知手段による火災の感知に連動して起動するものであることを特徴とする請求項1又は2記載の消火設備。
【請求項4】
前記消火装置は、平常時には待機状態にあり、人感センサによる人の感知に連動して起動するものであることを特徴とする請求項1又は2記載の消火設備。
【請求項5】
前記消火装置を複数備え、前記制御装置は、それら複数の消火装置のそれぞれについて、他の消火装置との間を結ぶ直線を基準軸として記憶する記憶手段を有するものであると共に、火源を検出し、火源基底部の方向を特定した複数の消火装置のそれぞれについて、前記基準軸を基準として、火源基底部の方向の相対方位角を求め、それら求めた相対方位角を互いに比較して、火源に近い消火装置を選択するように演算する演算手段を有するものであり、それにより、火源検出し、火源基底部の方向を特定した複数の消火装置から、火源に最も近い消火装置を選択し、その消火装置が消火の動作をするように制御するものであることを特徴とする請求項1乃至4の何れか記載の消火設備。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】

【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−223279(P2012−223279A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−92045(P2011−92045)
【出願日】平成23年4月18日(2011.4.18)
【出願人】(000233826)能美防災株式会社 (918)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月18日(2011.4.18)
【出願人】(000233826)能美防災株式会社 (918)
【Fターム(参考)】
[ Back to top ]