
消耗電極アーク溶接のくびれ検出制御方法
【課題】溶滴のくびれを検出して溶接電流を急減させるくびれ検出制御方法において、くびれ検出からアーク再発生までの時間が長いときに溶接状態が不安定になることを抑制する。
【解決手段】溶滴のくびれを検出すると、溶接電流Iwを低レベル電流値Ilまで減少させる。くびれ検出時点からの経過時間がアークが再発生する前に基準時間に達したときは、溶接電流Iwを高レベル電流値Ihまで増加させる。アークが再発生すると、溶接電流Iwを初期アーク電流値Iaiに変化させる。そして、この初期アーク電流値Iaiは、補償期間Th中の溶接ワイヤへの入熱量と相関する値に応じて変化させる。これにより、アーク再発生後のアーク長を適正化することができるので、溶接状態を安定化することができる。
【解決手段】溶滴のくびれを検出すると、溶接電流Iwを低レベル電流値Ilまで減少させる。くびれ検出時点からの経過時間がアークが再発生する前に基準時間に達したときは、溶接電流Iwを高レベル電流値Ihまで増加させる。アークが再発生すると、溶接電流Iwを初期アーク電流値Iaiに変化させる。そして、この初期アーク電流値Iaiは、補償期間Th中の溶接ワイヤへの入熱量と相関する値に応じて変化させる。これにより、アーク再発生後のアーク長を適正化することができるので、溶接状態を安定化することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、短絡期間中の溶滴のくびれを検出して溶接電流を減少させて溶接品質を向上させるための消耗電極アーク溶接のくびれ検出制御方法に関するものである。
【背景技術】
【0002】
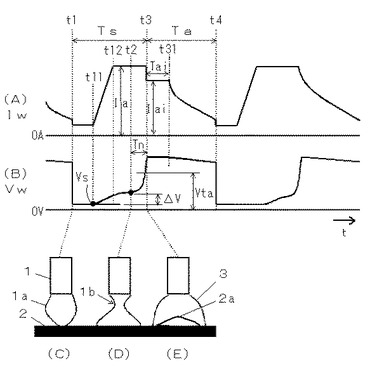
図6は、短絡期間Tsとアーク期間Taとを繰り返す消耗電極アーク溶接における電流・電圧波形及び溶滴移行を示す図である。同図(A)は消耗電極(以下、溶接ワイヤ1という)を通電する溶接電流Iwの時間変化を示し、同図(B)は溶接ワイヤ1と母材2との間に印加される溶接電圧Vwの時間変化を示し、同図(C)〜(E)は溶滴1aの移行の様子を示す。以下、同図を参照して説明する。
【0003】
時刻t1〜t3の短絡期間Ts中は溶接ワイヤ1先端の溶滴1aが母材2と短絡した状態にある。溶接電流Iwは、同図(A)に示すように、時刻t1〜t11の予め定めた初期期間中は小電流値の初期電流値に維持され、続く時刻t11〜t12の期間中は予め定めた傾斜で増加し、続く時刻t12からアークが再発生する時刻t3までは予め定めたピーク値に制御される。初期期間は1ms程度に設定され、初期電流値は50A程度に設定され、傾斜は100〜300A/ms程度に設定され、ピーク値は300〜400A程度に設定される。これらの値は、溶接ワイヤの種類、シールドガスの種類、送給速度等に応じて適正値に設定される。溶接電圧Vwは、同図(B)に示すように、短絡状態にあるために数V程度の低い値となる。
【0004】
同図(C)に示すように、時刻t1において溶滴1aが母材2と接触して短絡状態に入る。短絡状態に入ると溶接電流は小電流値の初期電流に減少するので、より確実な短絡状態へと導かれる。その後溶接電流Iwは増加するので、同図(D)に示すように、溶滴1aを通電する溶接電流Iwによる電磁的ピンチ力によって溶滴1a上部にくびれ1bが発生する。この電磁的ピンチ力は、溶接電流Iwの値に比例して大きくなる。したがって、溶接電流Iwを増加させることによって、電磁的ピンチ力を大きくして、くびれ1bの形成を促進している。そしてこのくびれ1bが急速に進行して、時刻t3において同図(E)に示すように、溶滴1aは溶接ワイヤ1から溶融池2aへと移行しアーク3が再発生する。
【0005】
溶滴1aにくびれ1bが発生すると、数百μs程度の短い時間後に短絡が開放されてアーク3が再発生する。すなわち、このくびれ現象は短絡開放の前兆現象となる。くびれ1bが発生すると、溶接電流Iwの通電路がくびれ部分で狭くなるために、くびれ部分の抵抗値が増大する。この抵抗値の増大は、くびれが進行してくびれ部分がより狭くなるほど大きくなる。したがって、短絡期間Ts中において溶接ワイヤ1と母材2との間の抵抗値の変化を検出することでくびれ現象の発生及び進行を検出することができる。この抵抗値の変化は、溶接電圧Vwを溶接電流Iwで除算することによって算出することができる。また、短絡期間Ts中の溶接電流Iwの変化に比べて、くびれ形成後の抵抗値の変化の方が大きい。このために、抵抗値の変化に代えて溶接電圧Vwの変化によってもくびれ現象の発生を検出することができる。具体的なくびれ検出方法としては、短絡期間Ts中の抵抗値又は溶接電圧値Vwの変化率(微分値)を算出し、この微分値が予め定めたくびれ検出基準値Vtnに達したことによってくびれ検出を行う方法がある。また、他の方法として、同図(B)に示すように、短絡期間Ts中のくびれ発生前(上記の初期期間中)の安定した短絡電圧値Vsからの電圧上昇値ΔVを算出し、時刻t2においてこの電圧上昇値ΔVが予め定めたくびれ検出基準値Vtnに達したことによってくびれ検出を行う方法がある。以下の説明では、くびれ検出方法が上記の電圧上昇値ΔVによる場合について説明するが、従来から種々提案されている他の方法であっても良い。時刻t3のアーク再発生の検出は、溶接電圧Vwが短絡/アーク判別値Vta以上になったことを判別して簡単に行うことができる。すなわち、Vw<Vtaの期間が短絡期間Tsとなり、Vw≧Vtaの期間がアーク期間Taとなる。時刻t2〜t3のくびれ発生を検出してからアーク再発生までの時間を、以下くびれ検出時間Tnと呼ぶことにする。
【0006】
時刻t3においてアークが再発生すると、溶接電流Iwは、同図(A)に示すように、時刻t3〜t31の予め定めた初期アーク期間Tai中は予め定めた初期アーク電流値Iaiに定電流制御される。そして、時刻t31移行は溶接電源が定電圧制御に切り替えられるので、溶接電流Iwはアーク負荷によってその値が決まり、スロープ状に減少することになる。同図(B)に示すように、溶接電圧Vwはアーク長に比例した値となる。アーク期間中の溶接電圧値Vwは、20〜30V程度になる。したがって、上記の短絡/アーク判別値Vtaは10〜15V程度に設定される。
【0007】
時刻t3〜t31の初期アーク期間Tai中は、比較的大きな値の初期アーク電流Iaiを所定期間通電するので、アーク長は急速に長くなり、溶接ワイヤ1への大きな入熱によって溶融が促進される。時刻t31移行も、溶接ワイヤ1の先端部が溶融されて溶滴1aが次第に形成される。
【0008】
上述した短絡期間Tsとアーク期間Taとを繰り返す消耗電極アーク溶接には、炭酸ガスアーク溶接、マグ溶接、ミグ溶接、短絡を伴うパルスアーク溶接等がある。炭酸ガスアーク溶接、マグ溶接及びミグ溶接の場合には、溶滴移行は、200A程度未満の電流領域では短絡移行形態となり、電流値が大きくなるとグロビュール移行形態又はスプレー移行形態となる。また、パルスアーク溶接の場合には、溶滴移行はスプレー移行形態となる。これらグロビュール移行形態及びスプレー移行形態においても、高速溶接等を行う場合にはアーク長を短く設定するので、短絡が発生する。したがって、この短絡を開放するために、上述したように、くびれ1bが形成されることになる。
【0009】
上述した短絡を伴う溶接では、時刻t3においてアーク3が再発生したときのアーク再発生時電流値Iaが大電流値であると、アーク3から溶融池2aへのアーク力が急峻に大きくなり、大量のスパッタが発生する。すなわち、アーク再発生時電流値Iaの値に略比例してスパッタ発生量が増加する。このため、スパッタの発生を抑制するためには、このアーク再発生時電流値Iaを小さくする必要がある。このための方法として、上記のくびれの発生を検出して溶接電流Iwを減少させてアーク再発生時電流値Iaを小さくするくびれ検出制御方法を付加した溶接電源が従来から種々提案されている。以下、この従来技術(例えば、特許文献1参照)について説明する。
【0010】
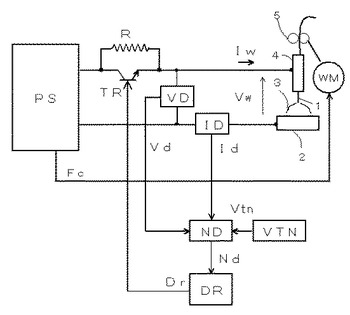
図7は、従来技術のくびれ検出制御方法を搭載した溶接装置のブロック図である。溶接電源PSは、一般的な消耗電極アーク溶接用の溶接電源であり、溶接電圧Vw及び溶接電流Iwを出力すると共に、送給モータWMの回転を制御するための送給制御信号Fcを送給モータWMに出力する。減流抵抗器Rは出力に直列に挿入され、それと並列にトランジスタTRが接続されている。溶接ワイヤ1は、送給モータWMに結合された送給ロール5の回転によって溶接トーチ4内を通って送給されて、母材2との間にアーク3が発生する。
【0011】
電圧検出回路VDは、溶接電圧Vwを検出して電圧検出信号Vdを出力する。電流検出回路IDは、溶接電流Iwを検出して、電流検出信号Idを出力する。くびれ検出基準値設定回路VTNは、予め定めたくびれ検出基準値信号Vtnを出力する。くびれ検出回路NDは、このくびれ検出基準値信号Vtn、上記の電圧検出信号Vd及び上記の電流検出信号Idを入力として、上述したように短絡期間中の電圧上昇値ΔVがくびれ検出基準値信号Vtnの値に達した時点でHighレベルとなり、アークが再発生して電圧検出信号Vdの値が短絡/アーク判別値Vta以上になった時点でLowレベルになるくびれ検出信号Ndを出力する。したがって、このくびれ検出信号NdがHighレベルの期間が上記のくびれ検出時間Tnとなる。上述したように、短絡期間中の電圧検出信号Vdの微分値がそれに対応したくびれ検出基準値信号Vtnの値に達した時点でくびれ検出信号NdをHighレベルに変化させるようにしても良い。さらに、電圧検出信号Vdの値を電流検出信号Idの値で除算して溶滴の抵抗値を算出し、この抵抗値の微分値がそれに対応したくびれ検出基準値信号Vtnの値に達した時点でくびれ検出信号NdをHighレベルに変化させるようにしても良い。駆動回路DRは、このくびれ検出信号NdがLowレベルのとき(非くびれ検出時)は上記のトランジスタTRをオン状態にする駆動信号Drを出力する。したがって、上記のトランジスタTRは、上記のくびれ検出信号NdがHighレベルのとき(くびれ検出時)はオフ状態になる。
【0012】
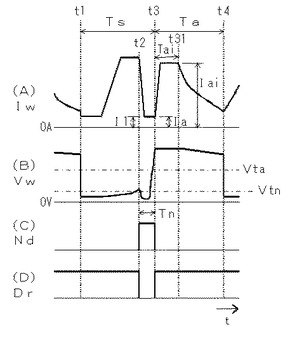
図8は、上記の溶接装置の各信号のタイミングチャートである。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示し、同図(C)はくびれ検出信号Ndの時間変化を示し、同図(D)は駆動信号Drの時間変化を示す。以下、同図を参照して説明する。
【0013】
同図において、時刻t2〜t3のくびれ検出時間Tn以外の期間は、同図(C)に示すように、くびれ検出信号NdはLowレベルであるので、同図(D)に示すように、駆動信号DrはHighレベルになる。この結果、トランジスタTRはオン状態になり減流抵抗器Rは短絡されるので、通常の消耗電極アーク溶接用の溶接装置と同一の動作となる。
【0014】
時刻t2において、同図(B)に示すように、短絡期間Ts中に溶接電圧Vwが上昇して電圧上昇値ΔVが予め定めたくびれ検出基準値信号Vtnの値と等しくなったことを検出して溶滴にくびれが発生したと判別すると、同図(C)に示すように、くびれ検出信号NdがHighレベルになる。これに応動して、同図(D)に示すように、駆動信号DrはLowレベルになるので、トランジスタTRはオフ状態になる。この結果、減流抵抗器Rが溶接電流Iwの通電路に挿入される。この減流抵抗器Rの値は、短絡負荷(0.01〜0.03Ω程度)の10倍以上大きな値(0.5〜3Ω程度)に設定される。このために、溶接電源内の直流リアクトル及びケーブルのリアクトルに蓄積されたエネルギーが急放電されて、同図(A)に示すように、溶接電流Iwは急激に減少して小電流値の低レベル電流Ilとなる。ここで、溶接電源PSの出力電圧が50Vであり、減流抵抗器Rが1Ωであるとすると、この低レベル電流Ilは50Aとなる。同図(B)に示すように、溶接電圧Vwは、時刻t2において溶接電流Iwが急減するために、一旦減少した後に急上昇する。そして、時刻t3において、短絡が開放されてアークが再発生すると、同図(B)に示すように、溶接電圧Vwが予め定めた短絡/アーク判別値Vta以上になる。これを検出して、同図(C)に示すように、くびれ検出信号NdはLowレベルになり、同図(D)に示すように、駆動信号DrはHighレベルになる。この結果、トランジスタTRはオン状態になり、通常の消耗電極アーク溶接の制御となる。時刻t3において、アークが再発生してトランジスタTRがオン状態になると、同図(A)に示すように、溶接電流Iwは、予め定めた初期アーク電流値Iaiまで増加し、時刻t3〜t31の予め定めた初期アーク期間Taiの間はその値を維持し、時刻t31移行はスロープ状に減少して、アーク負荷と送給速度とによって定まる値に収束する。この動作によって、時刻t3のアーク再発生時電流値Iaを小さくすることができるので、スパッタの発生を抑制することができる。くびれを検出したときに溶接電流Iwを急速に減少させる手段として、上記では減流抵抗器Rを通電路に挿入する方法を説明した。これ以外の手段として、溶接装置の出力端子間にコンデンサをスイッチング素子を介して並列に接続し、くびれを検出するとスイッチング素子をオン状態にしコンデンサから放電電流を通電して溶接電流Iwを急速に減少させる方法もある(例えば、特許文献2参照)。
【0015】
上述したくびれ検出制御方法では、スパッタ発生量の抑制効果を大きくするためには、くびれの発生を正確に検出することが重要となる。くびれの発生及びその進行状態は、シールドガスの種類、溶接ワイヤの種類、溶接継手、溶接ワイヤの送給速度、溶接姿勢等の溶接条件によって変化する。このために、溶接条件に応じてくびれの発生を検出する感度を適正化する必要がある。このくびれ検出の感度は、上記のくびれ検出基準値Vtnを増減させることによって調整することができる。すなわち、くびれ検出基準値Vtnを増加させると感度は低くなり、逆に減少させると感度は高くなる。くびれ検出基準値Vtnが大きすぎると感度が低すぎることになり、上記のくびれ検出時間Tnが短くなり、時にはくびれを検出できないときも生じ、アーク再発生までに溶接電流を充分に減少させることができないので、スパッタ発生量の抑制効果が小さくなる。逆に、くびれ検出基準値Vtnが小さすぎると感度は高すぎることになり、上記のくびれ検出時間Tnが長くなりすぎてアークがなかなか再発生しないために溶接状態が不安定になる。したがって、上記のくびれ検出時間Tnが、50〜500μs程度の範囲になるときが、くびれ検出基準値Vtnが適正値に設定されているときであると言える。
【0016】
上述したように、くびれ検出基準値Vtnは溶接条件に応じて適正値に設定されている。しかし、送給速度の変動、溶融池の不規則な運動、溶滴形状のバラツキ等の変動要因によって、くびれ検出基準値Vtnを適正化していても、くびれ検出時間Tnはバラツキを生じる。このバラツキの範囲が、上述したように、50〜500μs程度であるときは、スパッタの発生及び溶接状態の安定性にそれほど悪影響はない。また、くびれ検出時間Tnが、ときたま50μs未満になっても、少しスパッタが増える程度であり、大きな問題ではない。反面、くびれ検出時間Tnが500μsを超え、特に1000μs以上になると、溶接状態が不安定になり、アークが再発生しない状態に至ることも生じる。このために、くびれを検出した時点からの経過時間が基準時間に達してもアークが再発生していないときは、溶接電流Iwを増加させて溶接ワイヤの突き出し部への入熱を大きくし、突き出し部を高温にして溶断によってアークの再発生を導く補償制御が慣用されている。以下、この補償制御(例えば、特許文献3参照)について説明する。
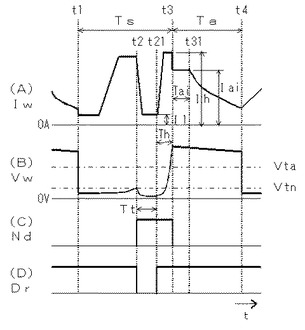
【0017】
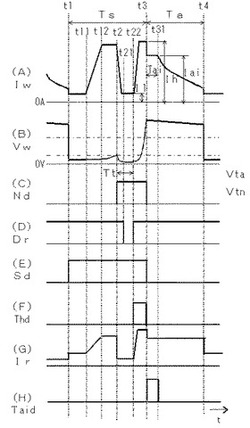
図9は、補償制御について説明するための上述した図8に対応する各信号のタイミングチャートである。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示し、同図(C)はくびれ検出信号Ndの時間変化を示し、同図(D)は駆動信号Drの時間変化を示す。同図において、時刻t21〜t3の補償期間Thの動作以外は、図8と同一であるのでそれらの説明は省略する。以下、同図を参照して時刻t21〜t3の補償期間Thの動作について説明する。
【0018】
時刻t2のくびれ検出時点からの経過時間tが、時刻t21において予め定めた基準時間Ttに達したときに、同図(B)に示すように、溶接電圧Vwは短絡/アーク判別値Vta未満であるので、アークはまだ再発生していない。このような場合には、同図(D)に示すように、駆動信号DrをHighレベルに変化させる。駆動信号DrがHighレベルになると、図7のトランジスタTRがオン状態になるので、同図(A)に示すように、溶接電流Iwは、低レベル電流Ilから急峻な傾斜で増加して所定値の高レベル電流Ihとなる。この急峻な傾斜は、溶接装置が出力できる最速の傾斜であり、1000A/ms程度である。高レベル電流Ihは500A程度である。溶接電流Iwが大きくなると、電磁的ピンチ力も大きくなるので、くびれの進行が促進されて、時刻t3においてアークが再発生する。溶接電圧Vwは、同図(B)に示すように、時刻t2の直後に一旦減少した後に、時刻t21まで緩やかに上昇する。そして、時刻t21において溶接電流Iwが高レベル電流Ihに増加すると、溶接電圧Vwは急上昇し、時刻t3において、アークが再発生すると、短絡/アーク判別値Vta以上のアーク電圧値となる。時刻t3においてアークが再発生すると、同図(A)に示すように、溶接電流Iwは、上記の初期アーク電流値Iaiに制御され、時刻t3〜t31の上記初期アーク期間Taiの間はその値を維持し、時刻t31移行はスロープ状に減少して、アーク負荷と送給速度とによって定まる値に収束する。同図(C)に示すように、くびれ検出信号Ndは、時刻t2のくびれ検出時点から時刻t3のアーク再発生までHighレベルになる。同図(D)に示すように、駆動信号Drは、時刻t21からHighレベルとなる。上記の基準時間Ttは、1000μs程度に設定される。この基準時間Ttは、溶接ワイヤの種類、シールドガスの種類、送給速度、溶接継手、溶接姿勢等に応じて適正値に設定される。
【先行技術文献】
【特許文献】
【0019】
【特許文献1】特開2006−281219号公報
【特許文献2】特開2005−288540号公報
【特許文献3】特開2006−116585号公報
【発明の概要】
【発明が解決しようとする課題】
【0020】
上述したように、くびれ検出時点からの経過時間が基準時間Ttに達してもアークが再発生していないときは、その時点からアークが再発生するまでの補償期間Th中は大電流値の高レベル電流Ihを通電することによって、溶接状態が不安定になることを抑制している。この補償期間Th中は、溶接ワイヤの突き出し部がジュール熱によって加熱されて高温状態になり、突き出し部の中間位置で溶断してアークが再発生する。この場合には、アークが再発生した時点におけるアーク長は、図8で上述した補償期間Thがない通常状態でアークが再発生したときに比べて長くなる。さらに、アークが再発生した時点における突き出し部の温度も、補償期間Thのない通常状態でアークが再発生したときに比べて高温になる。
【0021】
このように補償期間Th後にアークが再発生したときは、アーク長が長い状態であり、突き出し部も高温になっている。この状態で、大電流値の初期アーク電流Iaiが通電すると、溶接ワイヤの溶融が促進されてアーク長がさらに長くなり、溶接状態が不安定になる。
【0022】
そこで、本発明では、補償期間後にアークが再発生したときにアーク長が長くなり過ぎて溶接状態が不安定になることを抑制することができる消耗電極アーク溶接のくびれ検出制御方法を提供することを目的とする。
【課題を解決するための手段】
【0023】
上述した課題を解決するために、請求項1の発明は、溶接ワイヤと母材との間でアーク発生状態と短絡状態とを繰り返す消耗電極アーク溶接にあって、短絡状態からアークが再発生する前兆現象である溶滴のくびれを検出すると溶接電流Iwを低レベル電流値まで減少させ、前記くびれ検出時点からの経過時間がアークが再発生する前に予め定めた基準時間に達したときは前記溶接電流Iwを高レベル電流値まで増加させてアークを再発生させ、アークが再発生すると前記溶接電流Iwを初期アーク電流値まで変化させて通電する消耗電極アーク溶接のくびれ検出制御方法において、
前記溶接電流Iwが前記高レベル電流値へと増加を開始した時点からアークが再発生するまでの補償期間中に溶接ワイヤの突き出し部に供給された入熱量と相関する値を算出し、前記初期アーク電流値を前記相関値に応じて変化させる、
ことを特徴とする消耗電極アーク溶接のくびれ検出制御方法である。
【0024】
請求項2の発明は、溶接ワイヤの突き出し部の抵抗値Rwを予め設定し、前記相関値Qdを、Qd=∫Iw・Iw・Rw・dtの前記補償期間中の積分によって算出する、
ことを特徴とする請求項1記載の消耗電極アーク溶接のくびれ検出制御方法である。
【0025】
請求項3の発明は、前記相関値Qdを、Qd=∫Iw・dtの前記補償期間中の積分によって算出する、
ことを特徴とする請求項1記載の消耗電極アーク溶接のくびれ検出制御方法である。
【0026】
請求項4の発明は、前記相関値Qdを、Qd=∫dtの前記補償期間中の積分によって算出する、
ことを特徴とする請求項1記載の消耗電極アーク溶接のくびれ検出制御方法である。
【発明の効果】
【0027】
本発明によれば、相関値に応じて初期アーク電流値を適正化することによって、補償期間後にアークが再発生したときにアーク長が長くなり過ぎて溶接状態が不安定になることを抑制することができる。
【図面の簡単な説明】
【0028】
【図1】本発明の実施の形態に係る消耗電極アーク溶接のくびれ検出制御方法を実施するための溶接装置のブロック図である。
【図2】図1の溶接装置における各信号のタイミングチャートである。
【図3】図1の初期アーク電流設定回路IAIRに内蔵されている電流設定関数の第1の例を示す図である。
【図4】図1の初期アーク電流設定回路IAIRに内蔵されている電流設定関数の第2の例を示す図である。
【図5】図1の初期アーク電流設定回路IAIRに内蔵されている電流設定関数の第3の例を示す図である。
【図6】従来技術において、短絡期間Tsとアーク期間Taとを繰り返す消耗電極アーク溶接における電流・電圧波形及び溶滴移行を示す図である。
【図7】従来技術のくびれ検出制御方法を搭載した溶接装置のブロック図である。
【図8】図7の溶接装置における各信号のタイミングチャートである。
【図9】従来技術における補償制御について説明するための上述した図8に対応する各信号のタイミングチャートである。
【発明を実施するための形態】
【0029】
以下、図面を参照して本発明の実施の形態について説明する。
【0030】
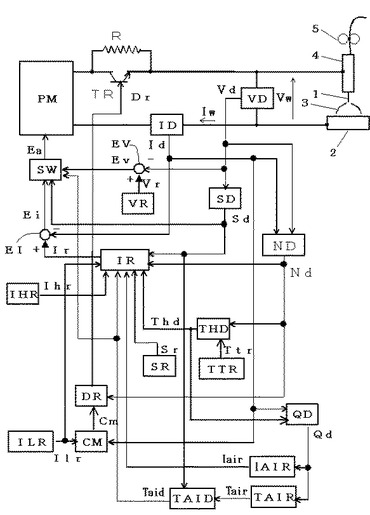
図1は、本発明の実施の形態に係る消耗電極アーク溶接のくびれ検出制御方法を実施するための溶接装置のブロック図である。以下、同図を参照して各ブロックについて説明する。
【0031】
電源主回路PMは、3相200V等の商用電源(図示は省略)を入力として、後述する誤差増幅信号Eaに従ってインバータ制御等の出力制御を行い、溶接電圧Vw及び溶接電流Iwを出力する。この電源主回路PMは、図示は省略するが、商用電源を整流する1次整流器、整流された直流を平滑する平滑コンデンサ、平滑された直流を高周波交流に変換するインバータ回路、高周波交流を溶接に適した電圧値に降圧する高周波変圧器、降圧された高周波交流を直流に整流する2次整流器、整流された直流を平滑するリアクトル、誤差増幅信号Eaを入力としてパルス幅変調制御を行う変調回路、パルス幅変調制御信を入力としてインバータ回路のスイッチング素子を駆動するインバータ駆動回路から構成される。
【0032】
減流抵抗器Rは、上記の電源主回路PMと溶接トーチ4との間に挿入される。この減流抵抗器Rの値は、上述した従来技術と同様である。トランジスタTRは、減流抵抗器Rと並列に接続されて、後述する駆動信号Drに従ってオン又はオフ制御される。
【0033】
溶接ワイヤ1は、送給モータ(図示は省略)に結合された送給ロール5の回転によって溶接トーチ4内を送給されて、母材2との間にアーク3が発生する。溶接ワイヤ1と母材2との間には溶接電圧Vwが印加し、アーク3中を溶接電流Iwが通電する。同図において、溶接ワイヤの送給を制御する回路については、図示は省略する。
【0034】
電流検出回路IDは、上記の溶接電流Iwを検出して、電流検出信号Idを出力する。電圧検出回路VDは、上記の溶接電圧Vwを検出して、電圧検出信号Vdを出力する。
【0035】
短絡/アーク判別回路SDは、上記の電圧検出信号Vdを入力として、その値が予め定めた短絡/アーク判別値Vta未満であるときは短絡状態にあると判別してHighレベルとなり、以上のときはアーク発生状態にあると判別してLowレベルになる短絡/アーク判別信号Sdを出力する。くびれ検出回路NDは、従来技術と同様に、上記の電圧検出信号Vd及び上記の電流検出信号Idを入力として、上述したように短絡期間中の電圧上昇値ΔVが予め定めたくびれ検出基準値Vtnの値に達した時点でHighレベルとなり、アークが再発生して電圧検出信号Vdの値が短絡/アーク判別値Vta以上になった時点でLowレベルになるくびれ検出信号Ndを出力する。上述したように、短絡期間中の電圧検出信号Vdの微分値がそれに対応したくびれ検出基準値Vtnに達した時点でくびれ検出信号NdをHighレベルに変化させるようにしても良い。さらに、電圧検出信号Vdの値を電流検出信号Idの値で除算して溶滴の抵抗値を算出し、この抵抗値の微分値がそれに対応するくびれ検出基準値Vtnに達した時点でくびれ検出信号NdをHighレベルに変化させるようにしても良い。
【0036】
低レベル電流設定回路ILRは、予め定めた低レベル電流設定信号Ilrを出力する。この低レベル電流設定信号Ilrの値は50A程度に設定される。電流比較回路CMは、この低レベル電流設定信号Ilr及び上記の電流検出信号Idを入力として、Id<IlrのときはHighレベルになり、Id≧IlrのときはLowレベルになる電流比較信号Cmを出力する。駆動回路DRは、この電流比較信号Cm及び上記のくびれ検出信号Ndを入力として、くびれ検出信号NdがHighレベルに変化するとLowレベルに変化し、その後に電流比較信号CmがHighレベルに変化するとHighレベルに変化する駆動信号Drを上記のトランジスタTRのベース端子に出力する。したがって、この駆動信号Drはくびれが検出されるとLowレベルになり、トランジスタTRがオフ状態になり通電路に減流抵抗器Rが挿入されるので、短絡負かを通電する溶接電流Iwは急減する。そして、急減した溶接電流Iwの値が低レベル電流設定信号Ilrの値まで減少すると、駆動信号DrはHighレベルになり、トランジスタTRがオン状態になるので、減流抵抗器Rは短絡されて通常の状態に戻る。
【0037】
基準時間設定回路TTRは、予め定めた基準時間設定信号Ttrを出力する。この基準時間設定信号Ttrの値は、600〜1000μs程度に設定される。補償期間判別回路THDは、この基準時間設定信号Ttr及び上記のくびれ検出信号Ndを入力として、くびれ検出信号NdがHighレベルになっている時間が基準時間設定信号Ttrの値に達した時点でHighレベルにセットされ、くびれ検出信号NdがLowレベルに変化した時点でLowレベルにリセットされる補償期間判別信号Thdを出力する。したがって、この補償期間判別信号Thdは、補償期間中はHighレベルになる信号である。
【0038】
高レベル電流設定回路IHRは、予め定めた高レベル電流設定信号Ihrを出力する。この高レベル電流設定信号Ihrの値は、400〜600A程度である。立上り傾斜設定回路SRは、予め定めた立上り傾斜設定信号Srを出力する。この立上り傾斜設定信号Srの値は、300〜600A/ms程度である。
【0039】
入熱相関値算出回路QDは、上記の電流検出信号Id及び上記の補償期間判別信号Thdを入力として、補償期間判別信号ThdがHighレベルの期間中は下式で定義される積分を行い、入熱相関値信号Qdを出力する。
1)式 Qd=∫Id・Id・Rw・dt
ここで、Rwは、溶接ワイヤの突き出し部の抵抗値であり、給電チップと母材との距離及び溶接ワイヤの種類が決まると定まる定数である。例えば、給電チップと母材との距離が20mmであり、溶接ワイヤが直径1.2mmの鉄鋼ワイヤである場合には、突き出し部の抵抗値Rw=0.01Ωとなる。この積分によって、補償期間中に突き出し部に供給される入熱量を算出している。この式によれば、下式の場合に比べて入熱量を正確に算出することができる。
2)式 Qd=∫Id・dt
上記1)式では乗算を行う必要があるが、乗算は演算負担が大きいので、ここでは簡略化している。このQdは、補償期間中の突き出し部への入熱量と相関(比例)する値となる。
3)式 Qd=∫dt
補償期間中の溶接電流が一定値であると仮定すると、上記1)式におけるId・Id・Rwは定数となる。したがって、このQdは、補償期間中の突き出し部への入熱量に相関(比例)する値となる。このQdは、補償期間の時間長さを計測していることになる。Qd=Thである。この式を使用すれば、演算負担が最も小さくなる。
【0040】
初期アーク期間設定回路TAIRは、予め定めた初期アーク期間設定信号Tairを出力する。この初期アーク期間設定信号Tairの値は、1〜3ms程度であり、溶接ワイヤの種類、シールドガスの種類、送給速度等に応じて適正値に設定される。初期アーク電流設定回路IAIRは、上記の入熱相関値信号Qdを入力として、予め定めた電流設定関数によって初期アーク電流設定信号Iairを算出する。この初期アーク電流設定信号Iairの値は、100〜400A程度に自動設定される。この電流設定関数は、入熱相関値信号Qdの値が大きくなるほど初期アーク電流設定信号Iairの値は小さくなる関数である。この関数については、図3〜図5で後述する。初期アーク期間判別回路TAIDは、上記の短絡/アーク判別信号Sd及び上記の初期アーク期間設定信号Tairを入力として、短絡/アーク判別信号SdがHighレベル(短絡)からLowレベル(アーク)に変化した時点から初期アーク期間設定信号Tairによって定まる期間だけHighレベルになる初期アーク期間判別信号Taidを出力する。
【0041】
電流設定回路IRは、上記の短絡/アーク判別信号Sd、上記の低レベル電流設定信号Ilr、上記のくびれ検出信号Nd、上記の補償期間判別信号Thd、上記の高レベル電流設定信号Ihr、上記の立上り傾斜設定信号Sr、上記の初期アーク期間判別信号Taid及び上記の初期アーク電流設定信号Iairを入力として、以下の処理を行い、電流設定信号Irを出力する。この回路の動作については、図2でも詳述する。
1)短絡/アーク判別信号SdがHighレベル(短絡)に変化した時点から予め定めた初期期間中は、予め定めた初期電流設定値を電流設定信号Irとして出力する。
2)その後は、電流設定信号Irの値を、上記の初期電流設定値から予め定めた傾斜設定値で定まる傾斜で予め定めたピーク設定値まで上昇させ、その値を維持する。
3)くびれ検出信号NdがHighレベル(くびれ検出)に変化すると、電流設定信号Irの値を低レベル電流設定信号Ilrの値に切り換える。
4)補償期間判別信号ThdがHighレベル(くびれ検出時間が基準時間に達した時点)に変化すると、電流設定信号Irの値を、低レベル電流設定信号Ilrの値から立上り傾斜設定信号Srによって定まる傾斜で高レベル電流設定信号Ihrの値まで上昇させ、その値を維持する。
5)初期アーク期間判別信号TaidがHighレベルになると、電流設定信号Irの値を初期アーク電流設定信号Iairの値に切り換える。
【0042】
電圧設定回路VRは、初期アーク期間を除くアーク期間中の溶接電圧を設定するための予め定めた電圧設定信号Vrを出力する。電流誤差増幅回路EIは、上記の電流設定信号Ir(+)と上記の電流検出信号Id(−)との誤差を増幅して、電流誤差増幅信号Eiを出力する。電圧誤差増幅回路EVは、上記の電圧設定信号Vr(+)と電圧検出信号Vd(−)との誤差を増幅して、電圧誤差増幅信号Evを出力する。制御切換回路SWは、上記の電流誤差増幅信号Ei、上記の電圧誤差増幅信号Ev、上記の短絡/アーク判別信号Sd及び上記の初期アーク期間判別信号Taidを入力として、短絡/アーク判別信号SdがHighレベル(短絡)又は初期アーク期間判別信号TaidがHighレベルのときは、電流誤差増幅信号Eiを誤差増幅信号Eaとして出力し、それ以外の期間中は電圧誤差増幅信号Evを誤差増幅信号Eaとして出力する。この回路により、短絡期間及び初期アーク期間中は定電流制御となり、初期アーク期間を除くアーク期間中は定電圧制御となる。
【0043】
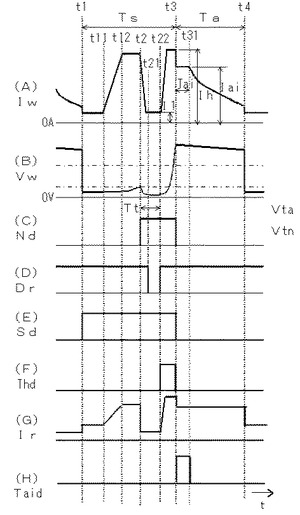
図2は、図1で上述した溶接装置における各信号のタイミングチャートである。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示し、同図(C)はくびれ検出信号Ndの時間変化を示し、同図(D)は駆動信号Drの時間変化を示し、同図(E)は短絡/アーク判別信号Sdの時間変化を示し、同図(F)は補償期間判別信号Thdの時間変化を示し、同図(G)は電流設定信号Irの時間変化を示し、同図(H)は初期アーク期間判別信号Taidの時間変化を示す。同図は、くびれ検出時点からの経過時間がアークが再発生する前に基準時間Ttに達した場合(補償期間が存在する場合)であり、上述した図9に対応している。くびれ検出時点からの経過時間が基準時間Ttに達する前にアークが再発生する正常な状態の場合のタイミングチャートは、基本的には上述した図8と同様の動作となるので、その場合の動作説明は省略する。以下、同図を参照して説明する。
【0044】
(1)時刻t1の短絡発生から時刻t2のくびれ検出時点までの動作
この期間中の動作は、上述した図8と同様である。時刻t1において溶接ワイヤが母材と接触すると短絡状態になり、同図(B)に示すように、溶接電圧Vwは数V程度の短絡電圧値に急減する。この溶接電圧Vwが短絡/アーク判別値Vta未満になったことを判別して、同図(E)に示すように、短絡/アーク判別信号SdはLowレベルからHighレベルに変化する。これに応動して、同図(G)に示すように、電流設定信号Irは時刻t1において初期アーク電流設定信号Iairの値から小さな値である予め定めた初期電流設定値に変化する。電流設定信号Irは、同図(G)に示すように、時刻t1〜t11の予め定めた初期期間中は予め定めた初期電流設定値となり、時刻t11〜t12の期間中は予め定めた傾斜設定値で定まる傾斜で上昇し、時刻t12〜t2の期間中は予め定めたピーク設定値となる。短絡期間中は上述したように定電流制御されているので溶接電流Iwは電流設定信号Irに相当する値に制御される。このために、同図(A)に示すように、溶接電流Iwは、時刻t1においてアーク期間の溶接電流から急減し、時刻t1〜t11の初期期間中は初期電流値となり、時刻t11〜t12の期間中は所定傾斜で上昇し、時刻t12〜t2の期間中はピーク値となる。同図(B)に示すように、溶接電圧Vwは、溶接電流Iwがピーク値となる時刻t12あたりから急上昇する。これは、溶滴にくびれが発生したためである。同図(C)に示すように、くびれ検出信号Ndは、後述する時刻t2〜t3の期間以外はLowレベルとなる。同図(D)に示すように、駆動信号Drは、後述する時刻t2〜t21の期間はLowレベルとなり、それ以外の期間はHighレベルとなる。したがって、同図において時刻t2以前の期間中は、駆動信号DrはHighレベルとなり、図1のトランジスタTRがオン状態となるので、減流抵抗器Rは短絡されて通常の消耗電極アーク溶接装置と同一の状態となる。同図(F)に示すように、補償期間判別信号Thdは、後述する時刻t22〜t3の期間Highレベルとなり、それ以外の期間はLowレベルとなる。同図(H)に示すように、初期アーク期間判別信号taidは、後述する時刻t3〜t31の期間Highレベルとなり、それ以外の期間はLowレベルとなる。
【0045】
(2)時刻t2のくびれ検出時点から時刻t22の基準時間Ttに達するまでの動作
時刻t2において、同図(B)に示すように、溶接電圧Vwが急上昇して初期期間中の電圧値からの電圧上昇値ΔVが予め定めたくびれ検出基準値Vtnと等しくなったことによってくびれを検出すると、同図(C)に示すように、くびれ検出信号NdはHighレベルに変化する。これに応動して、同図(D)に示すように、駆動信号DrはLowレベルになるので、図1のトランジスタTRはオフ状態となり減流抵抗器Rが通電路に挿入される。同時に、同図(G)に示すように、電流設定信号Irは低レベル電流設定信号Ilrの値に小さくなる。このために、同図(A)に示すように、溶接電流Iwはピーク値から低レベル電流値Ilへと急減する。そして、時刻t21において溶接電流Iwが低レベル電流値Ilまで減少すると、同図(D)に示すように、駆動信号DrはHighレベルに戻るので、図1のトランジスタTRはオン状態となり減流抵抗器Rは短絡される。同図(A)に示すように、溶接電流Iwは、電流設定信号Irが低レベル電流設定信号Ilrのままであるので、低レベル電流値Ilを維持する。したがって、トランジスタTRは、時刻t2にくびれが検出されてから時刻t21に溶接電流Iwが低レベル電流値Ilに減少するまでの期間のみオフ状態となる。同図(B)に示すように、溶接電圧Vwは、時刻t2から一旦減少した後に緩やかに上昇する。しかし、同図は時刻t2のくびれ検出時点からの経過時間が基準時間Ttに達する時刻t22の前にアークが再発生しない場合であるので、溶接電圧Vwは時刻t22までに急上昇して短絡/アーク判別値Vta以上となることはない。
【0046】
(3)時刻t22の基準時間Ttに達した時点から時刻t3のアーク再発生までの動作
時刻t22において、時刻t2にくびれ検出信号NdがHighレベルになった時点からの経過時間が基準時間設定信号Ttrによって定まる基準時間Ttに達すると、同図(F)に示すように、補償期間判別信号ThdはHighレベルに変化する。これに応動して、同図(G)に示すように、電流設定信号Irは、低レベル電流設定信号Ilrの値から立上り傾斜設定信号Srによって定まる傾斜で高レベル電流設定信号Ihrの値まで上昇して、その値を維持する。このために、同図(A)に示すように、溶接電流Iwは、低レベル電流値Ilから所定の立上り傾斜Sで高レベル電流値Ihまで上昇し、その値を維持する。同図では、高レベル電流値Ihは一定値であるが、時間経過に伴って上記の立上り傾斜Sよりも小さな傾斜で増加するようにしても良い。溶接電流Iwが増加したことによって、溶接ワイヤの突き出し部のジュール加熱が促進されて突き出し部で溶断し、時刻t3においてアークが再発生する。また、同図(F)に示す補償期間判別信号ThdがHighレベルである本期間中は、上述したように、図1の入熱相関値信号Qdを算出する。
【0047】
(4)時刻t3〜t31の初期アーク期間Tai中の動作
時刻t3においてアークが再発生すると、同図(B)に示すように、溶接電圧Vwは、溶接電流Iwが高レベル電流値Ihになったあたりから急上昇して、時刻t3において短絡/アーク判別値Vta以上となる。これに応動して、同図(E)に示すように、短絡/アーク判別信号SdがLowレベルに変化する。これに応動して、同図(H)に示すように、初期アーク期間判別信号TaidがHighレベルに変化し、初期アーク期間設定信号Tairによって定まる時刻t31までHighレベルを維持する。この期間中は、引き続き、溶接装置は定電流制御のままである。同図(G)に示すように、電流設定信号Irは、時刻t3において初期アーク電流設定信号Iairの値に変化する。この結果、同図(A)に示すように、溶接電流Iwは高レベル電流値Ihから初期アーク電流値Iaiへと変化する。この初期アーク電流設定信号Iairの値は、上述したように、前項で算出された入熱相関値信号Qdを入力とする予め定めた電流設定関数によって自動設定される。同図(B)に示すように、溶接電圧Vwは、数十Vのアーク電圧値となり、アーク長と対応した値となる。また、同図(C)に示すように、くびれ検出信号Ndは、溶接電圧Vwが短絡/アーク判別値Vtn以上となるので、Lowレベルに変化する。同様に、同図(F)に示すように、補償期間判別信号ThdもLowレベルに変化する。同図(G)に示すように、電流設定信号Irは、時刻t31以降も制御には使用されないがその値を維持する。
【0048】
(5)時刻t31〜t4の初期アーク期間Tai以降のアーク期間の動作
時刻t31において、同図(H)に示すように、初期アーク期間判別信号TaidがLowレベルに変化すると、溶接装置は定電流制御から定電圧制御へと切り換えられる。このために、同図(A)に示すように、溶接電流Iwは、スロープ状に減少して、アーク負荷と送給速度とによって決まる値に収束する。
【0049】
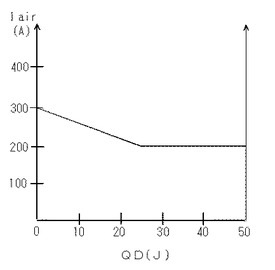
図3は、図1で上述した初期アーク電流設定回路IAIRに内蔵されている電流設定関数の第1の例を示す図である。同図は、入熱相関値信号Qdを、上述した1)式で算出する場合である。同図の横軸は入熱相関値信号Qd(J)を示しており、0〜50の範囲となっている。縦軸は初期アーク電流設定信号Iair(A)を示しており、0〜400の範囲となっている。同図は、溶接ワイヤが直径1.2mmの鉄鋼ワイヤの場合であり、シールドガスが100%炭酸ガスの場合であり、送給速度が8.5m/min(溶接電流平均値250A)の場合であり、突き出し部抵抗値Rwが0.01Ωの場合である。以下、同図を参照して説明する。
【0050】
電流設定関数は、Qd=0のときはIair=300となり、Qdの値が大きくなるのに伴いIairの値は右肩下がりの直線状に減少し、Qd=25のときIair=200となり、Qdがさらに大きくなってもIairはその値を維持する。Qd=0のときとは、くびれ検出時点からの経過時間が基準時間に達する前にアークが再発生した場合(補償期間がない場合)であり、上述した図8の場合である。
【0051】
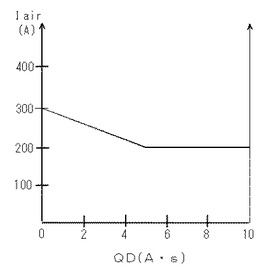
図4は、図1で上述した初期アーク電流設定回路IAIRに内蔵されている電流設定関数の第2の例を示す図である。同図は、入熱相関値信号Qdを、上述した2)式で算出する場合である。同図の横軸は入熱相関値信号Qd(A・s)を示しており、0〜10の範囲となっている。縦軸は初期アーク電流設定信号Iair(A)を示しており、0〜400の範囲となっている。同図は、溶接ワイヤが直径1.2mmの鉄鋼ワイヤの場合であり、シールドガスが100%炭酸ガスの場合であり、送給速度が8.5m/min(溶接電流平均値250A)の場合である。以下、同図を参照して説明する。
【0052】
電流設定関数は、Qd=0のときはIair=300となり、Qdの値が大きくなるのに伴いIairの値は右肩下がりの直線状に減少し、Qd=5のときIair=200となり、Qdがさらに大きくなってもIairはその値を維持する。Qd=0のときとは、くびれ検出時点からの経過時間が基準時間に達する前にアークが再発生した場合(補償期間がない場合)であり、上述した図8の場合である。
【0053】
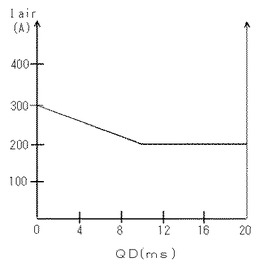
図5は、図1で上述した初期アーク電流設定回路IAIRに内蔵されている電流設定関数の第3の例を示す図である。同図は、入熱相関値信号Qdを、上述した3)式で算出する場合である。同図の横軸は入熱相関値信号Qd(ms)を示しており、0〜20の範囲となっている。縦軸は初期アーク電流設定信号Iair(A)を示しており、0〜400の範囲となっている。同図は、溶接ワイヤが直径1.2mmの鉄鋼ワイヤの場合であり、シールドガスが100%炭酸ガスの場合であり、送給速度が8.5m/min(溶接電流平均値250A)の場合である。以下、同図を参照して説明する。
【0054】
電流設定関数は、Qd=0のときはIair=300となり、Qdの値が大きくなるのに伴いIairの値は右肩下がりの直線状に減少し、Qd=10のときIair=200となり、Qdがさらに大きくなってもIairはその値を維持する。Qd=0のときとは、くびれ検出時点からの経過時間が基準時間に達する前にアークが再発生した場合(補償期間がない場合)であり、上述した図8の場合である。
【0055】
図3〜図5で上述したように電流設定関数は、基本的には入熱相関値信号Qdの値が大きくなると、初期アーク電流設定信号Iairの値は小さくなる関数である。そして、入熱相関値信号Qdの値が所定値以上になると、初期アーク電流設定信号Iairの値は一定値となるようにしている。これは、初期アーク電流設定信号Iairの値に下限値を設けていることになる。下限値を設けているのは、初期アーク電流設定信号Iairの値があまり小さくなると、溶接状態が不安定になるからである。これらの図において、右肩下がりの直線の代わりに、曲線状又は階段状に変化するようにしても良い。電流設定関数は、溶接ワイヤの種類、シールドガスの種類、送給速度等に応じて、実験によって適正パターンに設定される。
【0056】
次に、本実施の形態の作用効果について説明する。補償期間Th中は、大電流が通電して突き出し部がジュール加熱されて高温になり、溶断してアークが再発生する。このために、補償期間Th後にアークが再発生したときには、アーク再発生時点におけるアーク長及び突き出し部の温度は補償期間Th中に突き出し部に供給された入熱によって変化することになる。本実施の形態では、補償期間Th中の突き出し部への入熱と相関する値(入熱相関値信号Qd)を算出し、この相関値に応じて初期アーク期間Tai中の初期アーク電流値Iaiを変化させている。すなわち、相関値が大きくなるのに伴い、初期アーク電流値Iaiは小さくなるようにしている。これにより、初期アーク期間Taiが終了した時点におけるアーク長及び突き出し部の温度を適正化することができる。この結果、溶接状態を安定化することができる。したがって、本実施の形態によれば、相関値に応じて初期アーク電流値を適正化することによって、補償期間後にアークが再発生したときにアーク長が長くなり過ぎて溶接状態が不安定になることを抑制することができる。
【符号の説明】
【0057】
1 溶接ワイヤ
1a 溶滴
1b くびれ
2 母材
2a 溶融池
3 アーク
4 溶接トーチ
5 送給ロール
CM 電流比較回路
Cm 電流比較信号
DR 駆動回路
Dr 駆動信号
Ea 誤差増幅信号
EI 電流誤差増幅回路
Ei 電流誤差増幅信号
EV 電圧誤差増幅回路
Ev 電圧誤差増幅信号
Fc 送給制御信号
Ia アーク再発生時電流値
Iai 初期アーク電流
IAIR 初期アーク電流設定回路
Iair 初期アーク電流設定信号
ID 電流検出回路
Id 電流検出信号
Ih 高レベル電流
IHR 高レベル電流設定回路
Ihr 高レベル電流設定信号
Il 低レベル電流
ILR 低レベル電流設定回路
Ilr 低レベル電流設定信号
IR 電流設定回路
Ir 電流設定信号
Iw 溶接電流
ND くびれ検出回路
Nd くびれ検出信号
PM 電源主回路
PS 溶接電源
QD 入熱相関値算出回路
Qd 入熱相関値信号/相関値
R 減流抵抗器
Rw 突き出し部の抵抗値
S 立上り傾斜
SD 短絡/アーク判別回路
Sd 短絡/アーク判別信号
SR 立上り傾斜設定回路
Sr 立上り傾斜設定信号
SW 制御切換回路
t 経過時間
Ta アーク期間
Tai 初期アーク期間
TAID 初期アーク期間判別回路
Taid 初期アーク期間判別信号
TAIR 初期アーク期間設定回路
Tair 初期アーク期間設定信号
Th 補償期間
THD 補償期間判別回路
Thd 補償期間判別信号
Tn くびれ検出時間
TR トランジスタ
Ts 短絡期間
Tt 基準時間
TTR 基準時間設定回路
Ttr 基準時間設定信号
VD 電圧検出回路
Vd 電圧検出信号
VR 電圧設定回路
Vr 電圧設定信号
Vs 短絡電圧値
Vta 短絡/アーク判別値
VTN くびれ検出基準値設定回路
Vtn くびれ検出基準値(信号)
Vw 溶接電圧
WM 送給モータ
ΔV 電圧上昇値
【技術分野】
【0001】
本発明は、短絡期間中の溶滴のくびれを検出して溶接電流を減少させて溶接品質を向上させるための消耗電極アーク溶接のくびれ検出制御方法に関するものである。
【背景技術】
【0002】
図6は、短絡期間Tsとアーク期間Taとを繰り返す消耗電極アーク溶接における電流・電圧波形及び溶滴移行を示す図である。同図(A)は消耗電極(以下、溶接ワイヤ1という)を通電する溶接電流Iwの時間変化を示し、同図(B)は溶接ワイヤ1と母材2との間に印加される溶接電圧Vwの時間変化を示し、同図(C)〜(E)は溶滴1aの移行の様子を示す。以下、同図を参照して説明する。
【0003】
時刻t1〜t3の短絡期間Ts中は溶接ワイヤ1先端の溶滴1aが母材2と短絡した状態にある。溶接電流Iwは、同図(A)に示すように、時刻t1〜t11の予め定めた初期期間中は小電流値の初期電流値に維持され、続く時刻t11〜t12の期間中は予め定めた傾斜で増加し、続く時刻t12からアークが再発生する時刻t3までは予め定めたピーク値に制御される。初期期間は1ms程度に設定され、初期電流値は50A程度に設定され、傾斜は100〜300A/ms程度に設定され、ピーク値は300〜400A程度に設定される。これらの値は、溶接ワイヤの種類、シールドガスの種類、送給速度等に応じて適正値に設定される。溶接電圧Vwは、同図(B)に示すように、短絡状態にあるために数V程度の低い値となる。
【0004】
同図(C)に示すように、時刻t1において溶滴1aが母材2と接触して短絡状態に入る。短絡状態に入ると溶接電流は小電流値の初期電流に減少するので、より確実な短絡状態へと導かれる。その後溶接電流Iwは増加するので、同図(D)に示すように、溶滴1aを通電する溶接電流Iwによる電磁的ピンチ力によって溶滴1a上部にくびれ1bが発生する。この電磁的ピンチ力は、溶接電流Iwの値に比例して大きくなる。したがって、溶接電流Iwを増加させることによって、電磁的ピンチ力を大きくして、くびれ1bの形成を促進している。そしてこのくびれ1bが急速に進行して、時刻t3において同図(E)に示すように、溶滴1aは溶接ワイヤ1から溶融池2aへと移行しアーク3が再発生する。
【0005】
溶滴1aにくびれ1bが発生すると、数百μs程度の短い時間後に短絡が開放されてアーク3が再発生する。すなわち、このくびれ現象は短絡開放の前兆現象となる。くびれ1bが発生すると、溶接電流Iwの通電路がくびれ部分で狭くなるために、くびれ部分の抵抗値が増大する。この抵抗値の増大は、くびれが進行してくびれ部分がより狭くなるほど大きくなる。したがって、短絡期間Ts中において溶接ワイヤ1と母材2との間の抵抗値の変化を検出することでくびれ現象の発生及び進行を検出することができる。この抵抗値の変化は、溶接電圧Vwを溶接電流Iwで除算することによって算出することができる。また、短絡期間Ts中の溶接電流Iwの変化に比べて、くびれ形成後の抵抗値の変化の方が大きい。このために、抵抗値の変化に代えて溶接電圧Vwの変化によってもくびれ現象の発生を検出することができる。具体的なくびれ検出方法としては、短絡期間Ts中の抵抗値又は溶接電圧値Vwの変化率(微分値)を算出し、この微分値が予め定めたくびれ検出基準値Vtnに達したことによってくびれ検出を行う方法がある。また、他の方法として、同図(B)に示すように、短絡期間Ts中のくびれ発生前(上記の初期期間中)の安定した短絡電圧値Vsからの電圧上昇値ΔVを算出し、時刻t2においてこの電圧上昇値ΔVが予め定めたくびれ検出基準値Vtnに達したことによってくびれ検出を行う方法がある。以下の説明では、くびれ検出方法が上記の電圧上昇値ΔVによる場合について説明するが、従来から種々提案されている他の方法であっても良い。時刻t3のアーク再発生の検出は、溶接電圧Vwが短絡/アーク判別値Vta以上になったことを判別して簡単に行うことができる。すなわち、Vw<Vtaの期間が短絡期間Tsとなり、Vw≧Vtaの期間がアーク期間Taとなる。時刻t2〜t3のくびれ発生を検出してからアーク再発生までの時間を、以下くびれ検出時間Tnと呼ぶことにする。
【0006】
時刻t3においてアークが再発生すると、溶接電流Iwは、同図(A)に示すように、時刻t3〜t31の予め定めた初期アーク期間Tai中は予め定めた初期アーク電流値Iaiに定電流制御される。そして、時刻t31移行は溶接電源が定電圧制御に切り替えられるので、溶接電流Iwはアーク負荷によってその値が決まり、スロープ状に減少することになる。同図(B)に示すように、溶接電圧Vwはアーク長に比例した値となる。アーク期間中の溶接電圧値Vwは、20〜30V程度になる。したがって、上記の短絡/アーク判別値Vtaは10〜15V程度に設定される。
【0007】
時刻t3〜t31の初期アーク期間Tai中は、比較的大きな値の初期アーク電流Iaiを所定期間通電するので、アーク長は急速に長くなり、溶接ワイヤ1への大きな入熱によって溶融が促進される。時刻t31移行も、溶接ワイヤ1の先端部が溶融されて溶滴1aが次第に形成される。
【0008】
上述した短絡期間Tsとアーク期間Taとを繰り返す消耗電極アーク溶接には、炭酸ガスアーク溶接、マグ溶接、ミグ溶接、短絡を伴うパルスアーク溶接等がある。炭酸ガスアーク溶接、マグ溶接及びミグ溶接の場合には、溶滴移行は、200A程度未満の電流領域では短絡移行形態となり、電流値が大きくなるとグロビュール移行形態又はスプレー移行形態となる。また、パルスアーク溶接の場合には、溶滴移行はスプレー移行形態となる。これらグロビュール移行形態及びスプレー移行形態においても、高速溶接等を行う場合にはアーク長を短く設定するので、短絡が発生する。したがって、この短絡を開放するために、上述したように、くびれ1bが形成されることになる。
【0009】
上述した短絡を伴う溶接では、時刻t3においてアーク3が再発生したときのアーク再発生時電流値Iaが大電流値であると、アーク3から溶融池2aへのアーク力が急峻に大きくなり、大量のスパッタが発生する。すなわち、アーク再発生時電流値Iaの値に略比例してスパッタ発生量が増加する。このため、スパッタの発生を抑制するためには、このアーク再発生時電流値Iaを小さくする必要がある。このための方法として、上記のくびれの発生を検出して溶接電流Iwを減少させてアーク再発生時電流値Iaを小さくするくびれ検出制御方法を付加した溶接電源が従来から種々提案されている。以下、この従来技術(例えば、特許文献1参照)について説明する。
【0010】
図7は、従来技術のくびれ検出制御方法を搭載した溶接装置のブロック図である。溶接電源PSは、一般的な消耗電極アーク溶接用の溶接電源であり、溶接電圧Vw及び溶接電流Iwを出力すると共に、送給モータWMの回転を制御するための送給制御信号Fcを送給モータWMに出力する。減流抵抗器Rは出力に直列に挿入され、それと並列にトランジスタTRが接続されている。溶接ワイヤ1は、送給モータWMに結合された送給ロール5の回転によって溶接トーチ4内を通って送給されて、母材2との間にアーク3が発生する。
【0011】
電圧検出回路VDは、溶接電圧Vwを検出して電圧検出信号Vdを出力する。電流検出回路IDは、溶接電流Iwを検出して、電流検出信号Idを出力する。くびれ検出基準値設定回路VTNは、予め定めたくびれ検出基準値信号Vtnを出力する。くびれ検出回路NDは、このくびれ検出基準値信号Vtn、上記の電圧検出信号Vd及び上記の電流検出信号Idを入力として、上述したように短絡期間中の電圧上昇値ΔVがくびれ検出基準値信号Vtnの値に達した時点でHighレベルとなり、アークが再発生して電圧検出信号Vdの値が短絡/アーク判別値Vta以上になった時点でLowレベルになるくびれ検出信号Ndを出力する。したがって、このくびれ検出信号NdがHighレベルの期間が上記のくびれ検出時間Tnとなる。上述したように、短絡期間中の電圧検出信号Vdの微分値がそれに対応したくびれ検出基準値信号Vtnの値に達した時点でくびれ検出信号NdをHighレベルに変化させるようにしても良い。さらに、電圧検出信号Vdの値を電流検出信号Idの値で除算して溶滴の抵抗値を算出し、この抵抗値の微分値がそれに対応したくびれ検出基準値信号Vtnの値に達した時点でくびれ検出信号NdをHighレベルに変化させるようにしても良い。駆動回路DRは、このくびれ検出信号NdがLowレベルのとき(非くびれ検出時)は上記のトランジスタTRをオン状態にする駆動信号Drを出力する。したがって、上記のトランジスタTRは、上記のくびれ検出信号NdがHighレベルのとき(くびれ検出時)はオフ状態になる。
【0012】
図8は、上記の溶接装置の各信号のタイミングチャートである。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示し、同図(C)はくびれ検出信号Ndの時間変化を示し、同図(D)は駆動信号Drの時間変化を示す。以下、同図を参照して説明する。
【0013】
同図において、時刻t2〜t3のくびれ検出時間Tn以外の期間は、同図(C)に示すように、くびれ検出信号NdはLowレベルであるので、同図(D)に示すように、駆動信号DrはHighレベルになる。この結果、トランジスタTRはオン状態になり減流抵抗器Rは短絡されるので、通常の消耗電極アーク溶接用の溶接装置と同一の動作となる。
【0014】
時刻t2において、同図(B)に示すように、短絡期間Ts中に溶接電圧Vwが上昇して電圧上昇値ΔVが予め定めたくびれ検出基準値信号Vtnの値と等しくなったことを検出して溶滴にくびれが発生したと判別すると、同図(C)に示すように、くびれ検出信号NdがHighレベルになる。これに応動して、同図(D)に示すように、駆動信号DrはLowレベルになるので、トランジスタTRはオフ状態になる。この結果、減流抵抗器Rが溶接電流Iwの通電路に挿入される。この減流抵抗器Rの値は、短絡負荷(0.01〜0.03Ω程度)の10倍以上大きな値(0.5〜3Ω程度)に設定される。このために、溶接電源内の直流リアクトル及びケーブルのリアクトルに蓄積されたエネルギーが急放電されて、同図(A)に示すように、溶接電流Iwは急激に減少して小電流値の低レベル電流Ilとなる。ここで、溶接電源PSの出力電圧が50Vであり、減流抵抗器Rが1Ωであるとすると、この低レベル電流Ilは50Aとなる。同図(B)に示すように、溶接電圧Vwは、時刻t2において溶接電流Iwが急減するために、一旦減少した後に急上昇する。そして、時刻t3において、短絡が開放されてアークが再発生すると、同図(B)に示すように、溶接電圧Vwが予め定めた短絡/アーク判別値Vta以上になる。これを検出して、同図(C)に示すように、くびれ検出信号NdはLowレベルになり、同図(D)に示すように、駆動信号DrはHighレベルになる。この結果、トランジスタTRはオン状態になり、通常の消耗電極アーク溶接の制御となる。時刻t3において、アークが再発生してトランジスタTRがオン状態になると、同図(A)に示すように、溶接電流Iwは、予め定めた初期アーク電流値Iaiまで増加し、時刻t3〜t31の予め定めた初期アーク期間Taiの間はその値を維持し、時刻t31移行はスロープ状に減少して、アーク負荷と送給速度とによって定まる値に収束する。この動作によって、時刻t3のアーク再発生時電流値Iaを小さくすることができるので、スパッタの発生を抑制することができる。くびれを検出したときに溶接電流Iwを急速に減少させる手段として、上記では減流抵抗器Rを通電路に挿入する方法を説明した。これ以外の手段として、溶接装置の出力端子間にコンデンサをスイッチング素子を介して並列に接続し、くびれを検出するとスイッチング素子をオン状態にしコンデンサから放電電流を通電して溶接電流Iwを急速に減少させる方法もある(例えば、特許文献2参照)。
【0015】
上述したくびれ検出制御方法では、スパッタ発生量の抑制効果を大きくするためには、くびれの発生を正確に検出することが重要となる。くびれの発生及びその進行状態は、シールドガスの種類、溶接ワイヤの種類、溶接継手、溶接ワイヤの送給速度、溶接姿勢等の溶接条件によって変化する。このために、溶接条件に応じてくびれの発生を検出する感度を適正化する必要がある。このくびれ検出の感度は、上記のくびれ検出基準値Vtnを増減させることによって調整することができる。すなわち、くびれ検出基準値Vtnを増加させると感度は低くなり、逆に減少させると感度は高くなる。くびれ検出基準値Vtnが大きすぎると感度が低すぎることになり、上記のくびれ検出時間Tnが短くなり、時にはくびれを検出できないときも生じ、アーク再発生までに溶接電流を充分に減少させることができないので、スパッタ発生量の抑制効果が小さくなる。逆に、くびれ検出基準値Vtnが小さすぎると感度は高すぎることになり、上記のくびれ検出時間Tnが長くなりすぎてアークがなかなか再発生しないために溶接状態が不安定になる。したがって、上記のくびれ検出時間Tnが、50〜500μs程度の範囲になるときが、くびれ検出基準値Vtnが適正値に設定されているときであると言える。
【0016】
上述したように、くびれ検出基準値Vtnは溶接条件に応じて適正値に設定されている。しかし、送給速度の変動、溶融池の不規則な運動、溶滴形状のバラツキ等の変動要因によって、くびれ検出基準値Vtnを適正化していても、くびれ検出時間Tnはバラツキを生じる。このバラツキの範囲が、上述したように、50〜500μs程度であるときは、スパッタの発生及び溶接状態の安定性にそれほど悪影響はない。また、くびれ検出時間Tnが、ときたま50μs未満になっても、少しスパッタが増える程度であり、大きな問題ではない。反面、くびれ検出時間Tnが500μsを超え、特に1000μs以上になると、溶接状態が不安定になり、アークが再発生しない状態に至ることも生じる。このために、くびれを検出した時点からの経過時間が基準時間に達してもアークが再発生していないときは、溶接電流Iwを増加させて溶接ワイヤの突き出し部への入熱を大きくし、突き出し部を高温にして溶断によってアークの再発生を導く補償制御が慣用されている。以下、この補償制御(例えば、特許文献3参照)について説明する。
【0017】
図9は、補償制御について説明するための上述した図8に対応する各信号のタイミングチャートである。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示し、同図(C)はくびれ検出信号Ndの時間変化を示し、同図(D)は駆動信号Drの時間変化を示す。同図において、時刻t21〜t3の補償期間Thの動作以外は、図8と同一であるのでそれらの説明は省略する。以下、同図を参照して時刻t21〜t3の補償期間Thの動作について説明する。
【0018】
時刻t2のくびれ検出時点からの経過時間tが、時刻t21において予め定めた基準時間Ttに達したときに、同図(B)に示すように、溶接電圧Vwは短絡/アーク判別値Vta未満であるので、アークはまだ再発生していない。このような場合には、同図(D)に示すように、駆動信号DrをHighレベルに変化させる。駆動信号DrがHighレベルになると、図7のトランジスタTRがオン状態になるので、同図(A)に示すように、溶接電流Iwは、低レベル電流Ilから急峻な傾斜で増加して所定値の高レベル電流Ihとなる。この急峻な傾斜は、溶接装置が出力できる最速の傾斜であり、1000A/ms程度である。高レベル電流Ihは500A程度である。溶接電流Iwが大きくなると、電磁的ピンチ力も大きくなるので、くびれの進行が促進されて、時刻t3においてアークが再発生する。溶接電圧Vwは、同図(B)に示すように、時刻t2の直後に一旦減少した後に、時刻t21まで緩やかに上昇する。そして、時刻t21において溶接電流Iwが高レベル電流Ihに増加すると、溶接電圧Vwは急上昇し、時刻t3において、アークが再発生すると、短絡/アーク判別値Vta以上のアーク電圧値となる。時刻t3においてアークが再発生すると、同図(A)に示すように、溶接電流Iwは、上記の初期アーク電流値Iaiに制御され、時刻t3〜t31の上記初期アーク期間Taiの間はその値を維持し、時刻t31移行はスロープ状に減少して、アーク負荷と送給速度とによって定まる値に収束する。同図(C)に示すように、くびれ検出信号Ndは、時刻t2のくびれ検出時点から時刻t3のアーク再発生までHighレベルになる。同図(D)に示すように、駆動信号Drは、時刻t21からHighレベルとなる。上記の基準時間Ttは、1000μs程度に設定される。この基準時間Ttは、溶接ワイヤの種類、シールドガスの種類、送給速度、溶接継手、溶接姿勢等に応じて適正値に設定される。
【先行技術文献】
【特許文献】
【0019】
【特許文献1】特開2006−281219号公報
【特許文献2】特開2005−288540号公報
【特許文献3】特開2006−116585号公報
【発明の概要】
【発明が解決しようとする課題】
【0020】
上述したように、くびれ検出時点からの経過時間が基準時間Ttに達してもアークが再発生していないときは、その時点からアークが再発生するまでの補償期間Th中は大電流値の高レベル電流Ihを通電することによって、溶接状態が不安定になることを抑制している。この補償期間Th中は、溶接ワイヤの突き出し部がジュール熱によって加熱されて高温状態になり、突き出し部の中間位置で溶断してアークが再発生する。この場合には、アークが再発生した時点におけるアーク長は、図8で上述した補償期間Thがない通常状態でアークが再発生したときに比べて長くなる。さらに、アークが再発生した時点における突き出し部の温度も、補償期間Thのない通常状態でアークが再発生したときに比べて高温になる。
【0021】
このように補償期間Th後にアークが再発生したときは、アーク長が長い状態であり、突き出し部も高温になっている。この状態で、大電流値の初期アーク電流Iaiが通電すると、溶接ワイヤの溶融が促進されてアーク長がさらに長くなり、溶接状態が不安定になる。
【0022】
そこで、本発明では、補償期間後にアークが再発生したときにアーク長が長くなり過ぎて溶接状態が不安定になることを抑制することができる消耗電極アーク溶接のくびれ検出制御方法を提供することを目的とする。
【課題を解決するための手段】
【0023】
上述した課題を解決するために、請求項1の発明は、溶接ワイヤと母材との間でアーク発生状態と短絡状態とを繰り返す消耗電極アーク溶接にあって、短絡状態からアークが再発生する前兆現象である溶滴のくびれを検出すると溶接電流Iwを低レベル電流値まで減少させ、前記くびれ検出時点からの経過時間がアークが再発生する前に予め定めた基準時間に達したときは前記溶接電流Iwを高レベル電流値まで増加させてアークを再発生させ、アークが再発生すると前記溶接電流Iwを初期アーク電流値まで変化させて通電する消耗電極アーク溶接のくびれ検出制御方法において、
前記溶接電流Iwが前記高レベル電流値へと増加を開始した時点からアークが再発生するまでの補償期間中に溶接ワイヤの突き出し部に供給された入熱量と相関する値を算出し、前記初期アーク電流値を前記相関値に応じて変化させる、
ことを特徴とする消耗電極アーク溶接のくびれ検出制御方法である。
【0024】
請求項2の発明は、溶接ワイヤの突き出し部の抵抗値Rwを予め設定し、前記相関値Qdを、Qd=∫Iw・Iw・Rw・dtの前記補償期間中の積分によって算出する、
ことを特徴とする請求項1記載の消耗電極アーク溶接のくびれ検出制御方法である。
【0025】
請求項3の発明は、前記相関値Qdを、Qd=∫Iw・dtの前記補償期間中の積分によって算出する、
ことを特徴とする請求項1記載の消耗電極アーク溶接のくびれ検出制御方法である。
【0026】
請求項4の発明は、前記相関値Qdを、Qd=∫dtの前記補償期間中の積分によって算出する、
ことを特徴とする請求項1記載の消耗電極アーク溶接のくびれ検出制御方法である。
【発明の効果】
【0027】
本発明によれば、相関値に応じて初期アーク電流値を適正化することによって、補償期間後にアークが再発生したときにアーク長が長くなり過ぎて溶接状態が不安定になることを抑制することができる。
【図面の簡単な説明】
【0028】
【図1】本発明の実施の形態に係る消耗電極アーク溶接のくびれ検出制御方法を実施するための溶接装置のブロック図である。
【図2】図1の溶接装置における各信号のタイミングチャートである。
【図3】図1の初期アーク電流設定回路IAIRに内蔵されている電流設定関数の第1の例を示す図である。
【図4】図1の初期アーク電流設定回路IAIRに内蔵されている電流設定関数の第2の例を示す図である。
【図5】図1の初期アーク電流設定回路IAIRに内蔵されている電流設定関数の第3の例を示す図である。
【図6】従来技術において、短絡期間Tsとアーク期間Taとを繰り返す消耗電極アーク溶接における電流・電圧波形及び溶滴移行を示す図である。
【図7】従来技術のくびれ検出制御方法を搭載した溶接装置のブロック図である。
【図8】図7の溶接装置における各信号のタイミングチャートである。
【図9】従来技術における補償制御について説明するための上述した図8に対応する各信号のタイミングチャートである。
【発明を実施するための形態】
【0029】
以下、図面を参照して本発明の実施の形態について説明する。
【0030】
図1は、本発明の実施の形態に係る消耗電極アーク溶接のくびれ検出制御方法を実施するための溶接装置のブロック図である。以下、同図を参照して各ブロックについて説明する。
【0031】
電源主回路PMは、3相200V等の商用電源(図示は省略)を入力として、後述する誤差増幅信号Eaに従ってインバータ制御等の出力制御を行い、溶接電圧Vw及び溶接電流Iwを出力する。この電源主回路PMは、図示は省略するが、商用電源を整流する1次整流器、整流された直流を平滑する平滑コンデンサ、平滑された直流を高周波交流に変換するインバータ回路、高周波交流を溶接に適した電圧値に降圧する高周波変圧器、降圧された高周波交流を直流に整流する2次整流器、整流された直流を平滑するリアクトル、誤差増幅信号Eaを入力としてパルス幅変調制御を行う変調回路、パルス幅変調制御信を入力としてインバータ回路のスイッチング素子を駆動するインバータ駆動回路から構成される。
【0032】
減流抵抗器Rは、上記の電源主回路PMと溶接トーチ4との間に挿入される。この減流抵抗器Rの値は、上述した従来技術と同様である。トランジスタTRは、減流抵抗器Rと並列に接続されて、後述する駆動信号Drに従ってオン又はオフ制御される。
【0033】
溶接ワイヤ1は、送給モータ(図示は省略)に結合された送給ロール5の回転によって溶接トーチ4内を送給されて、母材2との間にアーク3が発生する。溶接ワイヤ1と母材2との間には溶接電圧Vwが印加し、アーク3中を溶接電流Iwが通電する。同図において、溶接ワイヤの送給を制御する回路については、図示は省略する。
【0034】
電流検出回路IDは、上記の溶接電流Iwを検出して、電流検出信号Idを出力する。電圧検出回路VDは、上記の溶接電圧Vwを検出して、電圧検出信号Vdを出力する。
【0035】
短絡/アーク判別回路SDは、上記の電圧検出信号Vdを入力として、その値が予め定めた短絡/アーク判別値Vta未満であるときは短絡状態にあると判別してHighレベルとなり、以上のときはアーク発生状態にあると判別してLowレベルになる短絡/アーク判別信号Sdを出力する。くびれ検出回路NDは、従来技術と同様に、上記の電圧検出信号Vd及び上記の電流検出信号Idを入力として、上述したように短絡期間中の電圧上昇値ΔVが予め定めたくびれ検出基準値Vtnの値に達した時点でHighレベルとなり、アークが再発生して電圧検出信号Vdの値が短絡/アーク判別値Vta以上になった時点でLowレベルになるくびれ検出信号Ndを出力する。上述したように、短絡期間中の電圧検出信号Vdの微分値がそれに対応したくびれ検出基準値Vtnに達した時点でくびれ検出信号NdをHighレベルに変化させるようにしても良い。さらに、電圧検出信号Vdの値を電流検出信号Idの値で除算して溶滴の抵抗値を算出し、この抵抗値の微分値がそれに対応するくびれ検出基準値Vtnに達した時点でくびれ検出信号NdをHighレベルに変化させるようにしても良い。
【0036】
低レベル電流設定回路ILRは、予め定めた低レベル電流設定信号Ilrを出力する。この低レベル電流設定信号Ilrの値は50A程度に設定される。電流比較回路CMは、この低レベル電流設定信号Ilr及び上記の電流検出信号Idを入力として、Id<IlrのときはHighレベルになり、Id≧IlrのときはLowレベルになる電流比較信号Cmを出力する。駆動回路DRは、この電流比較信号Cm及び上記のくびれ検出信号Ndを入力として、くびれ検出信号NdがHighレベルに変化するとLowレベルに変化し、その後に電流比較信号CmがHighレベルに変化するとHighレベルに変化する駆動信号Drを上記のトランジスタTRのベース端子に出力する。したがって、この駆動信号Drはくびれが検出されるとLowレベルになり、トランジスタTRがオフ状態になり通電路に減流抵抗器Rが挿入されるので、短絡負かを通電する溶接電流Iwは急減する。そして、急減した溶接電流Iwの値が低レベル電流設定信号Ilrの値まで減少すると、駆動信号DrはHighレベルになり、トランジスタTRがオン状態になるので、減流抵抗器Rは短絡されて通常の状態に戻る。
【0037】
基準時間設定回路TTRは、予め定めた基準時間設定信号Ttrを出力する。この基準時間設定信号Ttrの値は、600〜1000μs程度に設定される。補償期間判別回路THDは、この基準時間設定信号Ttr及び上記のくびれ検出信号Ndを入力として、くびれ検出信号NdがHighレベルになっている時間が基準時間設定信号Ttrの値に達した時点でHighレベルにセットされ、くびれ検出信号NdがLowレベルに変化した時点でLowレベルにリセットされる補償期間判別信号Thdを出力する。したがって、この補償期間判別信号Thdは、補償期間中はHighレベルになる信号である。
【0038】
高レベル電流設定回路IHRは、予め定めた高レベル電流設定信号Ihrを出力する。この高レベル電流設定信号Ihrの値は、400〜600A程度である。立上り傾斜設定回路SRは、予め定めた立上り傾斜設定信号Srを出力する。この立上り傾斜設定信号Srの値は、300〜600A/ms程度である。
【0039】
入熱相関値算出回路QDは、上記の電流検出信号Id及び上記の補償期間判別信号Thdを入力として、補償期間判別信号ThdがHighレベルの期間中は下式で定義される積分を行い、入熱相関値信号Qdを出力する。
1)式 Qd=∫Id・Id・Rw・dt
ここで、Rwは、溶接ワイヤの突き出し部の抵抗値であり、給電チップと母材との距離及び溶接ワイヤの種類が決まると定まる定数である。例えば、給電チップと母材との距離が20mmであり、溶接ワイヤが直径1.2mmの鉄鋼ワイヤである場合には、突き出し部の抵抗値Rw=0.01Ωとなる。この積分によって、補償期間中に突き出し部に供給される入熱量を算出している。この式によれば、下式の場合に比べて入熱量を正確に算出することができる。
2)式 Qd=∫Id・dt
上記1)式では乗算を行う必要があるが、乗算は演算負担が大きいので、ここでは簡略化している。このQdは、補償期間中の突き出し部への入熱量と相関(比例)する値となる。
3)式 Qd=∫dt
補償期間中の溶接電流が一定値であると仮定すると、上記1)式におけるId・Id・Rwは定数となる。したがって、このQdは、補償期間中の突き出し部への入熱量に相関(比例)する値となる。このQdは、補償期間の時間長さを計測していることになる。Qd=Thである。この式を使用すれば、演算負担が最も小さくなる。
【0040】
初期アーク期間設定回路TAIRは、予め定めた初期アーク期間設定信号Tairを出力する。この初期アーク期間設定信号Tairの値は、1〜3ms程度であり、溶接ワイヤの種類、シールドガスの種類、送給速度等に応じて適正値に設定される。初期アーク電流設定回路IAIRは、上記の入熱相関値信号Qdを入力として、予め定めた電流設定関数によって初期アーク電流設定信号Iairを算出する。この初期アーク電流設定信号Iairの値は、100〜400A程度に自動設定される。この電流設定関数は、入熱相関値信号Qdの値が大きくなるほど初期アーク電流設定信号Iairの値は小さくなる関数である。この関数については、図3〜図5で後述する。初期アーク期間判別回路TAIDは、上記の短絡/アーク判別信号Sd及び上記の初期アーク期間設定信号Tairを入力として、短絡/アーク判別信号SdがHighレベル(短絡)からLowレベル(アーク)に変化した時点から初期アーク期間設定信号Tairによって定まる期間だけHighレベルになる初期アーク期間判別信号Taidを出力する。
【0041】
電流設定回路IRは、上記の短絡/アーク判別信号Sd、上記の低レベル電流設定信号Ilr、上記のくびれ検出信号Nd、上記の補償期間判別信号Thd、上記の高レベル電流設定信号Ihr、上記の立上り傾斜設定信号Sr、上記の初期アーク期間判別信号Taid及び上記の初期アーク電流設定信号Iairを入力として、以下の処理を行い、電流設定信号Irを出力する。この回路の動作については、図2でも詳述する。
1)短絡/アーク判別信号SdがHighレベル(短絡)に変化した時点から予め定めた初期期間中は、予め定めた初期電流設定値を電流設定信号Irとして出力する。
2)その後は、電流設定信号Irの値を、上記の初期電流設定値から予め定めた傾斜設定値で定まる傾斜で予め定めたピーク設定値まで上昇させ、その値を維持する。
3)くびれ検出信号NdがHighレベル(くびれ検出)に変化すると、電流設定信号Irの値を低レベル電流設定信号Ilrの値に切り換える。
4)補償期間判別信号ThdがHighレベル(くびれ検出時間が基準時間に達した時点)に変化すると、電流設定信号Irの値を、低レベル電流設定信号Ilrの値から立上り傾斜設定信号Srによって定まる傾斜で高レベル電流設定信号Ihrの値まで上昇させ、その値を維持する。
5)初期アーク期間判別信号TaidがHighレベルになると、電流設定信号Irの値を初期アーク電流設定信号Iairの値に切り換える。
【0042】
電圧設定回路VRは、初期アーク期間を除くアーク期間中の溶接電圧を設定するための予め定めた電圧設定信号Vrを出力する。電流誤差増幅回路EIは、上記の電流設定信号Ir(+)と上記の電流検出信号Id(−)との誤差を増幅して、電流誤差増幅信号Eiを出力する。電圧誤差増幅回路EVは、上記の電圧設定信号Vr(+)と電圧検出信号Vd(−)との誤差を増幅して、電圧誤差増幅信号Evを出力する。制御切換回路SWは、上記の電流誤差増幅信号Ei、上記の電圧誤差増幅信号Ev、上記の短絡/アーク判別信号Sd及び上記の初期アーク期間判別信号Taidを入力として、短絡/アーク判別信号SdがHighレベル(短絡)又は初期アーク期間判別信号TaidがHighレベルのときは、電流誤差増幅信号Eiを誤差増幅信号Eaとして出力し、それ以外の期間中は電圧誤差増幅信号Evを誤差増幅信号Eaとして出力する。この回路により、短絡期間及び初期アーク期間中は定電流制御となり、初期アーク期間を除くアーク期間中は定電圧制御となる。
【0043】
図2は、図1で上述した溶接装置における各信号のタイミングチャートである。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示し、同図(C)はくびれ検出信号Ndの時間変化を示し、同図(D)は駆動信号Drの時間変化を示し、同図(E)は短絡/アーク判別信号Sdの時間変化を示し、同図(F)は補償期間判別信号Thdの時間変化を示し、同図(G)は電流設定信号Irの時間変化を示し、同図(H)は初期アーク期間判別信号Taidの時間変化を示す。同図は、くびれ検出時点からの経過時間がアークが再発生する前に基準時間Ttに達した場合(補償期間が存在する場合)であり、上述した図9に対応している。くびれ検出時点からの経過時間が基準時間Ttに達する前にアークが再発生する正常な状態の場合のタイミングチャートは、基本的には上述した図8と同様の動作となるので、その場合の動作説明は省略する。以下、同図を参照して説明する。
【0044】
(1)時刻t1の短絡発生から時刻t2のくびれ検出時点までの動作
この期間中の動作は、上述した図8と同様である。時刻t1において溶接ワイヤが母材と接触すると短絡状態になり、同図(B)に示すように、溶接電圧Vwは数V程度の短絡電圧値に急減する。この溶接電圧Vwが短絡/アーク判別値Vta未満になったことを判別して、同図(E)に示すように、短絡/アーク判別信号SdはLowレベルからHighレベルに変化する。これに応動して、同図(G)に示すように、電流設定信号Irは時刻t1において初期アーク電流設定信号Iairの値から小さな値である予め定めた初期電流設定値に変化する。電流設定信号Irは、同図(G)に示すように、時刻t1〜t11の予め定めた初期期間中は予め定めた初期電流設定値となり、時刻t11〜t12の期間中は予め定めた傾斜設定値で定まる傾斜で上昇し、時刻t12〜t2の期間中は予め定めたピーク設定値となる。短絡期間中は上述したように定電流制御されているので溶接電流Iwは電流設定信号Irに相当する値に制御される。このために、同図(A)に示すように、溶接電流Iwは、時刻t1においてアーク期間の溶接電流から急減し、時刻t1〜t11の初期期間中は初期電流値となり、時刻t11〜t12の期間中は所定傾斜で上昇し、時刻t12〜t2の期間中はピーク値となる。同図(B)に示すように、溶接電圧Vwは、溶接電流Iwがピーク値となる時刻t12あたりから急上昇する。これは、溶滴にくびれが発生したためである。同図(C)に示すように、くびれ検出信号Ndは、後述する時刻t2〜t3の期間以外はLowレベルとなる。同図(D)に示すように、駆動信号Drは、後述する時刻t2〜t21の期間はLowレベルとなり、それ以外の期間はHighレベルとなる。したがって、同図において時刻t2以前の期間中は、駆動信号DrはHighレベルとなり、図1のトランジスタTRがオン状態となるので、減流抵抗器Rは短絡されて通常の消耗電極アーク溶接装置と同一の状態となる。同図(F)に示すように、補償期間判別信号Thdは、後述する時刻t22〜t3の期間Highレベルとなり、それ以外の期間はLowレベルとなる。同図(H)に示すように、初期アーク期間判別信号taidは、後述する時刻t3〜t31の期間Highレベルとなり、それ以外の期間はLowレベルとなる。
【0045】
(2)時刻t2のくびれ検出時点から時刻t22の基準時間Ttに達するまでの動作
時刻t2において、同図(B)に示すように、溶接電圧Vwが急上昇して初期期間中の電圧値からの電圧上昇値ΔVが予め定めたくびれ検出基準値Vtnと等しくなったことによってくびれを検出すると、同図(C)に示すように、くびれ検出信号NdはHighレベルに変化する。これに応動して、同図(D)に示すように、駆動信号DrはLowレベルになるので、図1のトランジスタTRはオフ状態となり減流抵抗器Rが通電路に挿入される。同時に、同図(G)に示すように、電流設定信号Irは低レベル電流設定信号Ilrの値に小さくなる。このために、同図(A)に示すように、溶接電流Iwはピーク値から低レベル電流値Ilへと急減する。そして、時刻t21において溶接電流Iwが低レベル電流値Ilまで減少すると、同図(D)に示すように、駆動信号DrはHighレベルに戻るので、図1のトランジスタTRはオン状態となり減流抵抗器Rは短絡される。同図(A)に示すように、溶接電流Iwは、電流設定信号Irが低レベル電流設定信号Ilrのままであるので、低レベル電流値Ilを維持する。したがって、トランジスタTRは、時刻t2にくびれが検出されてから時刻t21に溶接電流Iwが低レベル電流値Ilに減少するまでの期間のみオフ状態となる。同図(B)に示すように、溶接電圧Vwは、時刻t2から一旦減少した後に緩やかに上昇する。しかし、同図は時刻t2のくびれ検出時点からの経過時間が基準時間Ttに達する時刻t22の前にアークが再発生しない場合であるので、溶接電圧Vwは時刻t22までに急上昇して短絡/アーク判別値Vta以上となることはない。
【0046】
(3)時刻t22の基準時間Ttに達した時点から時刻t3のアーク再発生までの動作
時刻t22において、時刻t2にくびれ検出信号NdがHighレベルになった時点からの経過時間が基準時間設定信号Ttrによって定まる基準時間Ttに達すると、同図(F)に示すように、補償期間判別信号ThdはHighレベルに変化する。これに応動して、同図(G)に示すように、電流設定信号Irは、低レベル電流設定信号Ilrの値から立上り傾斜設定信号Srによって定まる傾斜で高レベル電流設定信号Ihrの値まで上昇して、その値を維持する。このために、同図(A)に示すように、溶接電流Iwは、低レベル電流値Ilから所定の立上り傾斜Sで高レベル電流値Ihまで上昇し、その値を維持する。同図では、高レベル電流値Ihは一定値であるが、時間経過に伴って上記の立上り傾斜Sよりも小さな傾斜で増加するようにしても良い。溶接電流Iwが増加したことによって、溶接ワイヤの突き出し部のジュール加熱が促進されて突き出し部で溶断し、時刻t3においてアークが再発生する。また、同図(F)に示す補償期間判別信号ThdがHighレベルである本期間中は、上述したように、図1の入熱相関値信号Qdを算出する。
【0047】
(4)時刻t3〜t31の初期アーク期間Tai中の動作
時刻t3においてアークが再発生すると、同図(B)に示すように、溶接電圧Vwは、溶接電流Iwが高レベル電流値Ihになったあたりから急上昇して、時刻t3において短絡/アーク判別値Vta以上となる。これに応動して、同図(E)に示すように、短絡/アーク判別信号SdがLowレベルに変化する。これに応動して、同図(H)に示すように、初期アーク期間判別信号TaidがHighレベルに変化し、初期アーク期間設定信号Tairによって定まる時刻t31までHighレベルを維持する。この期間中は、引き続き、溶接装置は定電流制御のままである。同図(G)に示すように、電流設定信号Irは、時刻t3において初期アーク電流設定信号Iairの値に変化する。この結果、同図(A)に示すように、溶接電流Iwは高レベル電流値Ihから初期アーク電流値Iaiへと変化する。この初期アーク電流設定信号Iairの値は、上述したように、前項で算出された入熱相関値信号Qdを入力とする予め定めた電流設定関数によって自動設定される。同図(B)に示すように、溶接電圧Vwは、数十Vのアーク電圧値となり、アーク長と対応した値となる。また、同図(C)に示すように、くびれ検出信号Ndは、溶接電圧Vwが短絡/アーク判別値Vtn以上となるので、Lowレベルに変化する。同様に、同図(F)に示すように、補償期間判別信号ThdもLowレベルに変化する。同図(G)に示すように、電流設定信号Irは、時刻t31以降も制御には使用されないがその値を維持する。
【0048】
(5)時刻t31〜t4の初期アーク期間Tai以降のアーク期間の動作
時刻t31において、同図(H)に示すように、初期アーク期間判別信号TaidがLowレベルに変化すると、溶接装置は定電流制御から定電圧制御へと切り換えられる。このために、同図(A)に示すように、溶接電流Iwは、スロープ状に減少して、アーク負荷と送給速度とによって決まる値に収束する。
【0049】
図3は、図1で上述した初期アーク電流設定回路IAIRに内蔵されている電流設定関数の第1の例を示す図である。同図は、入熱相関値信号Qdを、上述した1)式で算出する場合である。同図の横軸は入熱相関値信号Qd(J)を示しており、0〜50の範囲となっている。縦軸は初期アーク電流設定信号Iair(A)を示しており、0〜400の範囲となっている。同図は、溶接ワイヤが直径1.2mmの鉄鋼ワイヤの場合であり、シールドガスが100%炭酸ガスの場合であり、送給速度が8.5m/min(溶接電流平均値250A)の場合であり、突き出し部抵抗値Rwが0.01Ωの場合である。以下、同図を参照して説明する。
【0050】
電流設定関数は、Qd=0のときはIair=300となり、Qdの値が大きくなるのに伴いIairの値は右肩下がりの直線状に減少し、Qd=25のときIair=200となり、Qdがさらに大きくなってもIairはその値を維持する。Qd=0のときとは、くびれ検出時点からの経過時間が基準時間に達する前にアークが再発生した場合(補償期間がない場合)であり、上述した図8の場合である。
【0051】
図4は、図1で上述した初期アーク電流設定回路IAIRに内蔵されている電流設定関数の第2の例を示す図である。同図は、入熱相関値信号Qdを、上述した2)式で算出する場合である。同図の横軸は入熱相関値信号Qd(A・s)を示しており、0〜10の範囲となっている。縦軸は初期アーク電流設定信号Iair(A)を示しており、0〜400の範囲となっている。同図は、溶接ワイヤが直径1.2mmの鉄鋼ワイヤの場合であり、シールドガスが100%炭酸ガスの場合であり、送給速度が8.5m/min(溶接電流平均値250A)の場合である。以下、同図を参照して説明する。
【0052】
電流設定関数は、Qd=0のときはIair=300となり、Qdの値が大きくなるのに伴いIairの値は右肩下がりの直線状に減少し、Qd=5のときIair=200となり、Qdがさらに大きくなってもIairはその値を維持する。Qd=0のときとは、くびれ検出時点からの経過時間が基準時間に達する前にアークが再発生した場合(補償期間がない場合)であり、上述した図8の場合である。
【0053】
図5は、図1で上述した初期アーク電流設定回路IAIRに内蔵されている電流設定関数の第3の例を示す図である。同図は、入熱相関値信号Qdを、上述した3)式で算出する場合である。同図の横軸は入熱相関値信号Qd(ms)を示しており、0〜20の範囲となっている。縦軸は初期アーク電流設定信号Iair(A)を示しており、0〜400の範囲となっている。同図は、溶接ワイヤが直径1.2mmの鉄鋼ワイヤの場合であり、シールドガスが100%炭酸ガスの場合であり、送給速度が8.5m/min(溶接電流平均値250A)の場合である。以下、同図を参照して説明する。
【0054】
電流設定関数は、Qd=0のときはIair=300となり、Qdの値が大きくなるのに伴いIairの値は右肩下がりの直線状に減少し、Qd=10のときIair=200となり、Qdがさらに大きくなってもIairはその値を維持する。Qd=0のときとは、くびれ検出時点からの経過時間が基準時間に達する前にアークが再発生した場合(補償期間がない場合)であり、上述した図8の場合である。
【0055】
図3〜図5で上述したように電流設定関数は、基本的には入熱相関値信号Qdの値が大きくなると、初期アーク電流設定信号Iairの値は小さくなる関数である。そして、入熱相関値信号Qdの値が所定値以上になると、初期アーク電流設定信号Iairの値は一定値となるようにしている。これは、初期アーク電流設定信号Iairの値に下限値を設けていることになる。下限値を設けているのは、初期アーク電流設定信号Iairの値があまり小さくなると、溶接状態が不安定になるからである。これらの図において、右肩下がりの直線の代わりに、曲線状又は階段状に変化するようにしても良い。電流設定関数は、溶接ワイヤの種類、シールドガスの種類、送給速度等に応じて、実験によって適正パターンに設定される。
【0056】
次に、本実施の形態の作用効果について説明する。補償期間Th中は、大電流が通電して突き出し部がジュール加熱されて高温になり、溶断してアークが再発生する。このために、補償期間Th後にアークが再発生したときには、アーク再発生時点におけるアーク長及び突き出し部の温度は補償期間Th中に突き出し部に供給された入熱によって変化することになる。本実施の形態では、補償期間Th中の突き出し部への入熱と相関する値(入熱相関値信号Qd)を算出し、この相関値に応じて初期アーク期間Tai中の初期アーク電流値Iaiを変化させている。すなわち、相関値が大きくなるのに伴い、初期アーク電流値Iaiは小さくなるようにしている。これにより、初期アーク期間Taiが終了した時点におけるアーク長及び突き出し部の温度を適正化することができる。この結果、溶接状態を安定化することができる。したがって、本実施の形態によれば、相関値に応じて初期アーク電流値を適正化することによって、補償期間後にアークが再発生したときにアーク長が長くなり過ぎて溶接状態が不安定になることを抑制することができる。
【符号の説明】
【0057】
1 溶接ワイヤ
1a 溶滴
1b くびれ
2 母材
2a 溶融池
3 アーク
4 溶接トーチ
5 送給ロール
CM 電流比較回路
Cm 電流比較信号
DR 駆動回路
Dr 駆動信号
Ea 誤差増幅信号
EI 電流誤差増幅回路
Ei 電流誤差増幅信号
EV 電圧誤差増幅回路
Ev 電圧誤差増幅信号
Fc 送給制御信号
Ia アーク再発生時電流値
Iai 初期アーク電流
IAIR 初期アーク電流設定回路
Iair 初期アーク電流設定信号
ID 電流検出回路
Id 電流検出信号
Ih 高レベル電流
IHR 高レベル電流設定回路
Ihr 高レベル電流設定信号
Il 低レベル電流
ILR 低レベル電流設定回路
Ilr 低レベル電流設定信号
IR 電流設定回路
Ir 電流設定信号
Iw 溶接電流
ND くびれ検出回路
Nd くびれ検出信号
PM 電源主回路
PS 溶接電源
QD 入熱相関値算出回路
Qd 入熱相関値信号/相関値
R 減流抵抗器
Rw 突き出し部の抵抗値
S 立上り傾斜
SD 短絡/アーク判別回路
Sd 短絡/アーク判別信号
SR 立上り傾斜設定回路
Sr 立上り傾斜設定信号
SW 制御切換回路
t 経過時間
Ta アーク期間
Tai 初期アーク期間
TAID 初期アーク期間判別回路
Taid 初期アーク期間判別信号
TAIR 初期アーク期間設定回路
Tair 初期アーク期間設定信号
Th 補償期間
THD 補償期間判別回路
Thd 補償期間判別信号
Tn くびれ検出時間
TR トランジスタ
Ts 短絡期間
Tt 基準時間
TTR 基準時間設定回路
Ttr 基準時間設定信号
VD 電圧検出回路
Vd 電圧検出信号
VR 電圧設定回路
Vr 電圧設定信号
Vs 短絡電圧値
Vta 短絡/アーク判別値
VTN くびれ検出基準値設定回路
Vtn くびれ検出基準値(信号)
Vw 溶接電圧
WM 送給モータ
ΔV 電圧上昇値
【特許請求の範囲】
【請求項1】
溶接ワイヤと母材との間でアーク発生状態と短絡状態とを繰り返す消耗電極アーク溶接にあって、短絡状態からアークが再発生する前兆現象である溶滴のくびれを検出すると溶接電流Iwを低レベル電流値まで減少させ、前記くびれ検出時点からの経過時間がアークが再発生する前に予め定めた基準時間に達したときは前記溶接電流Iwを高レベル電流値まで増加させてアークを再発生させ、アークが再発生すると前記溶接電流Iwを初期アーク電流値まで変化させて通電する消耗電極アーク溶接のくびれ検出制御方法において、
前記溶接電流Iwが前記高レベル電流値へと増加を開始した時点からアークが再発生するまでの補償期間中に溶接ワイヤの突き出し部に供給された入熱量と相関する値を算出し、前記初期アーク電流値を前記相関値に応じて変化させる、
ことを特徴とする消耗電極アーク溶接のくびれ検出制御方法。
【請求項2】
溶接ワイヤの突き出し部の抵抗値Rwを予め設定し、前記相関値Qdを、Qd=∫Iw・Iw・Rw・dtの前記補償期間中の積分によって算出する、
ことを特徴とする請求項1記載の消耗電極アーク溶接のくびれ検出制御方法。
【請求項3】
前記相関値Qdを、Qd=∫Iw・dtの前記補償期間中の積分によって算出する、
ことを特徴とする請求項1記載の消耗電極アーク溶接のくびれ検出制御方法。
【請求項4】
前記相関値Qdを、Qd=∫dtの前記補償期間中の積分によって算出する、
ことを特徴とする請求項1記載の消耗電極アーク溶接のくびれ検出制御方法。
【請求項1】
溶接ワイヤと母材との間でアーク発生状態と短絡状態とを繰り返す消耗電極アーク溶接にあって、短絡状態からアークが再発生する前兆現象である溶滴のくびれを検出すると溶接電流Iwを低レベル電流値まで減少させ、前記くびれ検出時点からの経過時間がアークが再発生する前に予め定めた基準時間に達したときは前記溶接電流Iwを高レベル電流値まで増加させてアークを再発生させ、アークが再発生すると前記溶接電流Iwを初期アーク電流値まで変化させて通電する消耗電極アーク溶接のくびれ検出制御方法において、
前記溶接電流Iwが前記高レベル電流値へと増加を開始した時点からアークが再発生するまでの補償期間中に溶接ワイヤの突き出し部に供給された入熱量と相関する値を算出し、前記初期アーク電流値を前記相関値に応じて変化させる、
ことを特徴とする消耗電極アーク溶接のくびれ検出制御方法。
【請求項2】
溶接ワイヤの突き出し部の抵抗値Rwを予め設定し、前記相関値Qdを、Qd=∫Iw・Iw・Rw・dtの前記補償期間中の積分によって算出する、
ことを特徴とする請求項1記載の消耗電極アーク溶接のくびれ検出制御方法。
【請求項3】
前記相関値Qdを、Qd=∫Iw・dtの前記補償期間中の積分によって算出する、
ことを特徴とする請求項1記載の消耗電極アーク溶接のくびれ検出制御方法。
【請求項4】
前記相関値Qdを、Qd=∫dtの前記補償期間中の積分によって算出する、
ことを特徴とする請求項1記載の消耗電極アーク溶接のくびれ検出制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−94840(P2013−94840A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−241820(P2011−241820)
【出願日】平成23年11月4日(2011.11.4)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月4日(2011.11.4)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
[ Back to top ]