
液体マイクロジャンクション表面試料採取器に対する表面アレイの自動位置制御
システム(20)及び方法が質量分析法の検出に使用するために液体のジャンクションに基づいた表面試料採取システムのプローブから表面への距離を制御するための画像分析手法を利用する。そのような手法は、表面から溶液組成を試料採取するのに使用される液体のマイクロジャンクションを手を使用しないで形成し、完全に自動化された表面試料採取システムを達成するために表面の走査中にマイクロジャンクションの厚さを必要に応じて再び最適化することを可能にする。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は米国エネルギー省によってUT−Battelle社に与えられた契約番号DE−AC05−00OR22725に基づく米国政府の援助によって行われ、米国政府は本発明に一定の権利を有する。
【0002】
本発明は一般に試料採取の手段と方法に関し、より詳細には検体を有する表面アレイ点を試料採取する手段と方法に関する。
【背景技術】
【0003】
本出願と同じ譲受人を有する先の米国特許第6,803,566号には、検体を有する表面アレイ点の試料採取を行う、試料採取技術が開示されている。より具体的には、記載された試料採取技術は、先端の尖ったプローブと、関連する自己吸引式放出器を利用し、その放出器を通って、溶離液などの液体の薬剤が表面アレイに送出され、分析の目的で表面アレイから試料が導かれる。さらに、位置決めシステムが、プローブに対する表面アレイの位置を変えるために、X、Y座標軸(すなわち表面アレイの平面内)に沿って表面アレイを自動的に平行移動するために設けられる。言い換えれば、表面アレイをプローブに対してX、Y座標軸の方向に移動させることによって、プローブの先端は、表面アレイに沿った任意の点(すなわちX−Y座標位置)と位置合わせして配置される。その後、表面アレイとプローブの先端は、プローブの先端と表面アレイの間に液体のマイクロジャンクション(microjunction)が現れるまで互いに向かって(すなわち、Z座標軸に沿って)手動で動かすことができ、このようなプローブの表面アレイに対する状態で、アレイ上の対応する点がプローブによって試料採取される。その後、試料は適切な試験装置に導かれ、そこで試料の所望の分析が実施される。そのような試料採取技術で使用されるプローブは、特に薄層クロマトグラフィと質量分析法を結びつけるためのインターフェースとして適している。参照された特許は、タンパク質マイクロアレイが分析されるプロテオミクスの分野で有用になっているものとして試料採取技術を記載するが、その他の用途を有することができる。
【0004】
従来及び上記に示したように、最初の液体のマイクロジャンクションを形成し、その後の試験中に最適なマイクロジャンクションの厚さを維持するための、プローブの先端と表面アレイの間の(すなわちZ座標軸に沿った)間隔を置いた関係はオペレータの介入を必要とした。言い換えれば、オペレータは、試料採取の目的でプローブの先端と表面アレイとを互いに隣接させて手動で位置決めし、必要に応じて試料採取手順の間の全体を通してプローブから表面アレイへの距離を手動で調整することが求められていた。さらに、表面アレイの上の異なる点又は(たとえばX又はY座標経路に沿った)互いに異なるディベロップメント・レーン(development lanes)から複数の試料を集めることは、プローブの先端と表面アレイの間の距離のさらなるオペレータ制御による、すなわち手動の調整を伴う傾向がある。したがって、従来技術の試料採取技術の間にプローブから表面アレイへの距離を制御する間にオペレータの介入が必要である結果として、この従来技術の試料採集技術の正確さは一般に、関係するオペレータの熟練と一致したものになる。
【0005】
表面アレイ点又はディベロップメント・レーンからの試料の採集の間にプローブから表面アレイへの距離を自動的に制御する手段を使用して上述の試料採取技術を提供することが望ましい。
【発明の開示】
【発明が解決しようとする課題】
【0006】
したがって、本発明の目的は、試料採集の作業中にオペレータの介入を必要としない試料採取プローブと、プローブによって試料採取されるアレイの表面との間の距離を自動的に制御する新規の改善されたシステムと方法を提供することである。
【0007】
本発明の別の目的は、表面アレイをプローブによって試料採取する目的で、プローブと表面アレイが望ましいの空間を置いた関係で自動的に配置されるようなシステムと方法を提供することである。
【0008】
本発明の別の目的は、プローブから表面の距離が最適な間隔で維持されるように、試料採取手順の間全体を通して連続的に監視され、必要に応じて調整されるようなシステムと方法を提供することである。
【0009】
本発明の別の目的は、構造が複雑でなく、しかも動作の際に効果的であるようなシステムを提供することである。
【課題を解決するための手段】
【0010】
本発明は表面アレイから検体を含む試料を得るための試料採取システムと方法にある。
【0011】
本発明のシステムは、先端を有する試料採取プローブを備え、試料採取プローブの先端と表面アレイとの間に最適な液体のマイクロジャンクションが現れるように、表面アレイから所望の間隔を置いた目的の距離に配置された場合、分析のために表面アレイから試料採取するようになされた試料採取プローブを備える。システムは、互いに向かって、また互いから離れるように試料採取プローブ及び表面アレイを移動する手段、ならびにプローブの先端及び表面アレイの両方の画像を取り込み、取り込まれた画像に対応する信号を生成する手段をさらに備える。さらに、取り込まれた画像に対応する信号を受け取り、取り込まれた画像からプローブの先端と表面アレイの間の実際の距離を決定する手段がシステム内に含まれる。次いで、比較手段がプローブの先端と表面アレイの間の実際の距離を所望の目標の距離と比較し、プローブの先端と表面アレイの間の実際の距離と、所望の目標の距離との間の違いが所定の範囲外にある場合に、表面アレイとプローブ先端を互いに向かって、また互いから離れるように移動することによって、実際の距離が所望の目標の距離に接近するように、互いに向かって、また互いから離れる、表面アレイ及びプローブ先端の移動を開始する。
【0012】
本発明の方法は、本発明のシステムによって実施されるステップを含む。特に、そのようなステップは、プローブの先端及び表面アレイの両方の画像を取り込み、取り込まれた画像からプローブの先端と表面アレイの間の実際の距離を決定するステップを含む。次いで、プローブの先端と表面アレイの間の実際の距離は、試料を採集するための最適な液体のマイクロジャンクションがプローブ先端と表面アレイの間に現われる所望の目標の距離と比較され、それに続いて表面アレイとプローブ先端は、プローブの先端と表面アレイの間の実際の距離と、所望の目標の距離とが所定の範囲外にある場合に、表面アレイとプローブ先端を互いに向かって、また互いから離れるように移動することによって、実際の距離が所望の目標の距離に接近するように、互いに向かって、また互いから離れるように移動される。
【発明を実施するための最良の形態】
【0013】
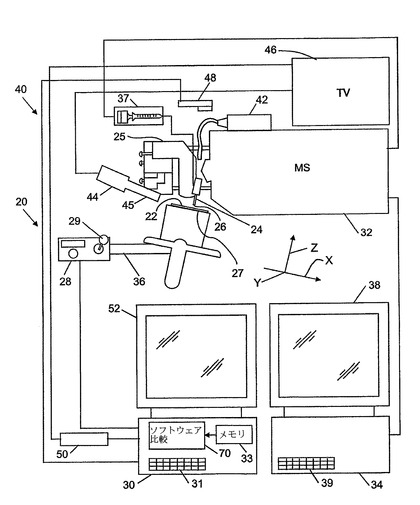
次に、より詳しく図面に注目し、図1を考察すると、全体的に20で示され、本発明の特徴が、後続の分析のために表面アレイ22のうちの少なくとも1つの点から試料を得る目的を実現する表面試料採取エレクトロスプレー・システムの1つの実施形態が概略的に示されている。たとえば、表面アレイ22は、試料が質量分析計32によって分析されることが望ましいタンパク質マイクロアレイであり、システム20は対象になる任意のいくつかの表面を試料採取するのに使用できる。したがって、本発明の原理は、様々に適用できる。
【0014】
システム20は、表面アレイ22に近くに配置可能な先端26で終端する、一対の同心の(すなわち内側と外側の)チューブを有する試料採取プローブ24(及び関連する自己吸引式放出器25)を備える。試料採取プロセス中に、所定の液体(たとえば溶離液)がシリンジ・ポンプ37からプローブ24の外側のチューブを通って表面アレイ22の上に導かれ、採集された試料を分析する目的で所望の試料がプローブ24に内側のチューブを通って表面アレイ22の残りから所定の液体と共に導かれる。試料採取プローブ24、及び試料が後続の分析の目的で採集される方法をより完全に説明するために、その開示が参照によって本明細書に組み込まれ、本出願と同じ譲受人を有する米国特許第6,803,566号に参照を行うことができる。
【0015】
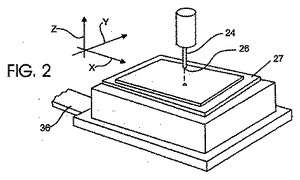
図1、2を参照し、アレイ22の表面に沿った任意の点から試料を採集できるようにするために、プローブ24はその先端26と共に、固定された静止状態で支持され、表面アレイ22は、示されたX−Y座標軸に沿って、すなわち支持プレート27の平面内で、及び示されたZ座標軸に沿ってプローブ24の先端26に向かって、またそこから離れてプローブ24に対して移動するように、支持プレート27の上方に支持される。示されたシステムの支持プレート27は、たとえば薄層クロマトグラフィ(TLC)プレートの形を取ることができ、その上に分析を所望するある量の材料が配置される。本明細書での議論の目的で、表面アレイ22は支持プレート27によってX−Y平面内に支持され、(実質的にプローブ24の長手方向軸に一致する)Z軸がX−Y平面に垂直である。
【0016】
支持プレート27と支持される表面アレイ22をX、Y、Z座標軸に沿って移動するように、支持プレート27は、オレゴン州EugeneのApplied Scientific Instrumentation社からMS2000 XYZステージの名称で市販されるものなどの、XYZステージ28(図1)の移動可能な支持アーム36に支持された形で装着される。XYZステージ28は、ジョイスティック制御ユニット29に適切に有線接続され、そのジョイスティック制御ユニット29は、システム20によって行われる試料採取プロセス中に、アレイ22がプローブ先端26の下のX−Y平面内で移動されると、表面アレイ22に沿って、又はアレイ22を横切って任意の所望のレーンに沿って(すなわちX又はY座標経路に沿って)試料を所望の点(すなわち任意の所望のX−Y座標位置)から取ることができるように、コマンド信号を受け取る(ラップトップ・コンピュータ30の形の)第1の制御コンピュータに連結される。スウィープ速度などの表面アレイ22とプローブ24のそのような相対移動の性質、及びプローブ24が表面アレイ22と位置合わせして配置されることが望ましいX−Y位置の識別を、たとえばコンピュータ・キーボード31を介してコンピュータ30に入力され、又はコンピュータ30のメモリ33内に予めプログラムできる。
【0017】
XYZステージ28の内部の構成要素の説明は、必要であると考えられないが、プローブ先端26に対する支持表面27(及び表面アレイ22)のX、Y座標位置は、たとえばXYZステージ28の内部に装着された一対の可逆のサーボモータ(図示されない)の適切な作動を介して制御され、プローブ先端26に対する支持表面27(及び表面アレイ22)のZ座標位置は、たとえばXYZステージ28の内部に装着された可逆のステップ・モータ(図示されない)の適切な作動を介して制御されると説明すれば十分であろう。したがって、X、Y座標のサーボモータに適切に電力を加えることによって、アレイ22は、プローブ24の先端26がアレイ22のX−Y座標平面内の任意の点と位置合わせして配置できるように配置でき、Z軸のステップ・モータに適切に電力を加えることによって、アレイ22は、プローブ先端26に向かって、又はそこから離れるように移動できる。
【0018】
引き続き図1を参照すると、システム20は、分析の目的でプローブ24から導かれた試料を受け入れる試料採取プローブ24に連結された質量分析計32をさらに備え、質量分析計32には、その質量分析計32の動作と機能を制御する(パーソナル・コンピュータ34の形の)第2の制御コンピュータが関連付けられている。質量分析計32として、示されたシステム20と共に使用するのに適した質量分析計の例が、4000 Qtrapの商品名でカナダ オンタリオ州ConcordのMDS SCIEXから市販されている。2つの個別のコンピュータ30、34が(質量分析計32を含む)システムの構成要素の様々な動作を制御するために、示されたシステム20内で利用されるが、システム20内で行われる動作の全ては、本発明では、1つのコンピュータを使用して制御され、あるいは、質量分析計のソフトウェア・パッケージ内に読み込まれた適切なソフトウェア・コンポーネントを介して制御できる。この後者の例では、単一のソフトウェア・パッケージがXYZステージング、画像分析、質量分析の検出を制御する。
【0019】
システム20の特徴は、プローブ24の先端26と表面アレイ22の間の間隔を置いた距離(すなわち示されたZ座標軸に沿って測定した距離)を制御するために、全体的に40で示された画像分析手段を備えることである。示されたシステム20内で、画像分析手段40は、プローブ先端26の影がアレイ22の表面の上に落ちるように先端26に向かって光のビームを送るために、プローブ先端26に隣接して支持される光源42を備える。さらに、閉回路カメラ44が、プローブ先端26の画像を採集するためにアレイ22の一方の側に支持され、影が試料採集の作業の準備と作業中にプローブ先端26によってアレイの上に落とされ、ビデオ(たとえば白黒テレビジョンなどの)モニタ46がカメラ44によって採集された画像を受け取り、表示するためにカメラ44に連結されている。モニタ46は、カメラ44によって撮影された画像に対応するコンピュータ30に信号を伝えるために、(ビデオ・キャプチャ・デバイス50を介して)ラップトップ・コンピュータ30に接続される。本明細書により詳細に説明されるように、これらの採集された画像が、プローブ24の先端26と表面アレイ22の間の実際のリアルタイムの距離を決定するのに使用される。
【0020】
さらに、システム20は、プローブ24と表面アレイ22の広角の表示をオペレータに提供するために、全体的にプローブ24と表面アレイ22に向けられたラップトップ・コンピュータ30に接続されたレンズを有するウェブカム48を備える。ウェブカム48によって採集された画像は、52で示される表示スクリーン上で見ることができ、試料採集作業の準備でプローブ24に対して表面アレイ22の最初の位置決めを容易にするためにオペレータによってラップトップ・コンピュータ30に関連付けられる。
【0021】
カメラ44として使用するのに適した閉回路カメラの例は、Panasonic GP−KR222の商品名で松下電器産業株式会社から市販されており、カメラ44は、Optem 70 XLの商品名でニューヨーク州FairportのThales Optem社から市販されているもののようなズーム・レンズ45を備えている。ビデオ・キャプチャ・デバイス50として使用するのに適したビデオ・キャプチャ・デバイスの例が、カリフォルニア州ComptonのBelkin社からBelkin USB VideoBus IIの商品名で市販されており、ウェブカム48として使用するのに適したウェブカムの例が、カリフォルニア州MilpitasのW.Creative Labs社からCreative Notebook Webcamの商品名で市販されている。
【0022】
システム20とその画像分析手段40の動作は、システムの動作の説明を通してよりよく理解することができ、システム20は、その画像分析の使用により、試料採取プローブ24の先端26と試料採取する表面アレイ22の間の液体のマイクロジャンクションの形成を開始するためにプローブ24と表面アレイ22の間の距離のリアルタイムの測定値を監視し、その後に、表面アレイ22がアレイ22に沿ったその他の点から、又はアレイ22を横切る異なるレーンから試料を採集する目的で表面アレイ22がX又はY座標軸に沿って移動されても、(Z軸に沿って測定した)最適のジャンクション距離が試料採取プロセス全体を通して維持されるように、必要に応じてラップトップ・コンピュータ30とXYZステージ28を介して実際のプローブから表面アレイへの距離に対する調整を開始する。
【0023】
システム20によって行われる試料採集作業の始めに、表面アレイ22から試料を採集する目的で、プローブ24と表面アレイ22の間の最適なマイクロジャンクションの厚さが提示される距離に対応するプローブから表面アレイへの所望の距離が、ラップトップ・コンピュータ30のメモリ33内に予めプログラムされる。最適なマイクロジャンクションの厚さは、試料採取されることが望まれる様々な材料(たとえば溶液組成など)の間で変わり、出願人らは、実験的に、試料採取されることが望まれる様々な材料の数に関する最適なマイクロジャンクションの厚さを決定した。そのような最適な厚さは、たとえば20から50μmの間に収まる。出願人等によって開発され、コンピュータ30内に読み込まれた適切なソフトウェアによって、オペレータは、試料採取される表面アレイ22を構成する材料を(コンピュータが作成した使用可能な材料のリストから)特定することができ、コンピュータ30は、その材料に関する最適なマイクロジャンクションの厚さと、付随するプローブから表面アレイへの距離とを自動的に特定する。本明細書で明らかになるように、この予め定められた付随するプローブから表面アレイへの距離は、プローブ先端26及び表面アレイ22が間隔を置くことが望まれる目的の距離を与え、システム40によって行われる画像分析プロセスの間、実際の又はリアルタイムのプローブから表面アレイへの距離が、表面アレイ22に関する最適なマイクロジャンクションの厚さに相当する所望の目標のプローブから表面アレイへの距離と比較される。
【0024】
システム20による画像分析の準備において、オペレータは、XYZステージ28が表面アレイ22がプローブ24の先端26から間隔を置くが、そこに比較的近接して配置されるまで、表面アレイ22をZ軸に沿ってプローブ先端26に向かって移動するように、ラップトップ・コンピュータ30内に適切な位置決めコマンドを入力する。このセットアップ段階の間、表面アレイ22とプローブ先端26の間の相対位置は、ウェブカム48を介して得られる画像を視認するオペレータによって視覚的に監視され、アレイ22がプローブ先端26に近づきすぎないようにラップトップ表示スクリーン52上に表示される。言い換えれば、アレイ22がプローブ先端26にあまりにも近づいてプローブから表面アレイへの距離が目標の距離より小さくなる危険を低下するために、アレイ22は、このセットアップ段階中にプローブ先端26にこれ以上、たとえば約400μmよりも近づかない。
【0025】
表面アレイ22がこのセットアップ段階中にプローブ先端26の約400μm内に行った後に、XYZステージ28が表面アレイ22を(Z座標軸に沿って)プローブ先端26のより近くに移動させ、光ビームが光源42からプローブ24に向かって送られ、それによってプローブ先端26の影が表面アレイ22上に落とされるように、オペレータは、ラップトップ・コンピュータ30のキーボード31を介してコンピュータ30に適切なコマンドを入力する。アレイ22がプローブ先端26の近くに移動されると、プローブ先端26と表面アレイ22の連続的な画像、より具体的にはその上に落とされるプローブ先端26の影が、カメラ44によって取り込まれ、又は撮影される。取り込まれたこれらの画像に対応する電気信号がラップトップ・コンピュータ30に即座に伝達され、そこでこれらの画像のうちの選択された1つに画像分析が行われる。本発明では、表現「取り込まれた画像のうちの選択された1つ」は、予め選択されかつ一定の間を空けた時間間隔(たとえば1.5秒毎)で取り込まれた画像を意味し、分析のために選択されたこれらの画像の間の時間間隔は、ラップトップ・コンピュータ30に予めプログラムされ、又はそこで選択できる。
【0026】
同じ線に沿って、また、取り込まれた画像のうちの選択された1つから、ラップトップ・コンピュータ30は、各画像に対してコンピュータ30内に読み込まれた適切なプログラムによって、Z軸に沿った各画像のライン平均輝度(average line brightness:LAB)のプロットを作成する。その後、これらのLABのプロットは、プローブ先端26と表面アレイ22の間リアルタイム又は実際の、間隔を置いた距離を決定するのに利用できる。
【0027】
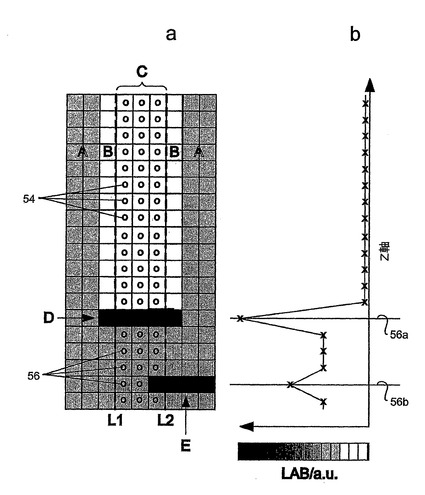
例として、図3aにプローブ先端26と試料採取される表面アレイ22の例示の9画素の幅と19画素の高さの取り込まれた画像の概略図が示される。図3aの画像内で、「A」で示す領域は背景であり、「B」で示す領域はプローブの画像の試験されない部分であり、コンピュータ30によって分析された図3aの「C」で示す領域が、2つの垂直な線L1とL2の間にある。さらに、「D」で示す部分は液体/プローブ境界面である。加えられた光源42からの適切な照明によって、プローブ先端26と表面アレイ22の画像が取り込まれると、その結果生じる試料採取プローブ24と表面アレイ22の画像は、(たとえば溶離液などの)液体材料が先端26からわずかに突出するプローブ先端26の画像よりも明るい。ラインL1とL2の間に延びている、56で示される水平ラインに沿った画素の輝度は、コンピュータ30によって合計される(たとえば図3aの例示の画像に円54によって印された、ライン毎の3つの画素)。この計算された(すなわち足し合わされた合計)の値は、水平ラインの平均輝度を示し、これらのライン平均輝度(LAB)の値は、図3bに示されるグラフを得るためにZ軸位置に対して(すなわちプローブから表面アレイへの方向に沿って)プロットされる。
【0028】
取り込まれた画像の任意の画素の輝度を、システム20がどのように測定するかに関する限りは、画像の画素は赤、緑、青の成分から構成されることに注目すべきである。システム20、又はより具体的にはコンピュータ30は、赤、緑、青の成分のそれぞれの強度を特定し、次いでLAB分析に使用する輝度値を得るためにこれらの構成要素の強度を共に加える。緑色などの表面アレイの特定の色が画像分析を乱すことが判断されると、(たとえば、現在の例でLAB分析に使用する輝度値を得るために、赤と青の成分のみの強度を共に加えるが、緑の強度は加えない)ソフトウェア内に生じる画像から画素の強度を計算する適切なフィルタ・アルゴリズムを適用できる。この後者の、分析される画像の画素から緑色が除去された場合では、輝度は画像の赤の成分の強度と青の成分の強度の単純に足し合わせたものとして定義できる。画像を改善し、それによって画像分析の結果に有利な影響を与えるために、望まれるようにコンピュータ30内で多くのタイプのフィルタリング又は画像操作を行っても良い。
【0029】
プロットされたLABは、試験された範囲の輝度と最も暗いLAB値に対して標準化される。図3aの画像から、最も低いLABが得られる水平ライン(そのラインは、図3aの56a、56bで示される)が、プローブ先端26のZ軸位置、及び表面アレイ22上にEで示されるプローブ24のZ軸位置の影に対応することが理解できるであろう。本明細書で明らかになるように、最も低いLABが得られるこれらの(2つの)水平ライン56a、56bの間隔を置いた距離は、プローブ24と表面アレイ22の間の実際の間隔を置いた距離を計算するのに使用される。たとえば、水平ライン56aと56bの間にある各画像の画素が実際の5μmの間隔に相当することが分かれば、その場合、水平ライン56aと56bの間に3画素がある画像は、プローブ24と表面アレイ22が実際に15μmの距離で離隔していることを示す。そのような分析目的に関しては、ラップトップ・コンピュータ30のメモリ33は、取り込まれた画像の画素当たりの実際の離隔した距離に関連する情報を予めプログラムされている。
【0030】
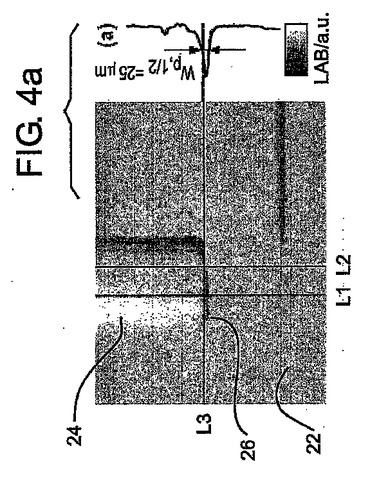
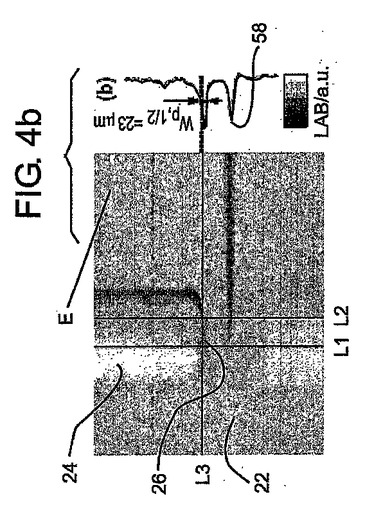
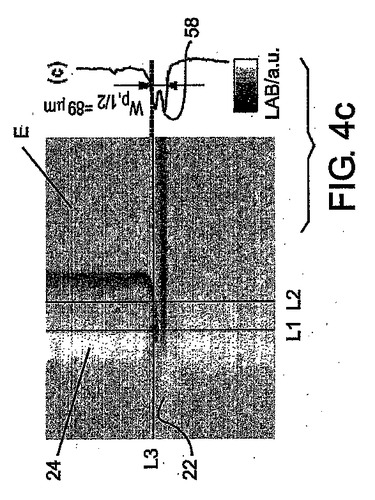
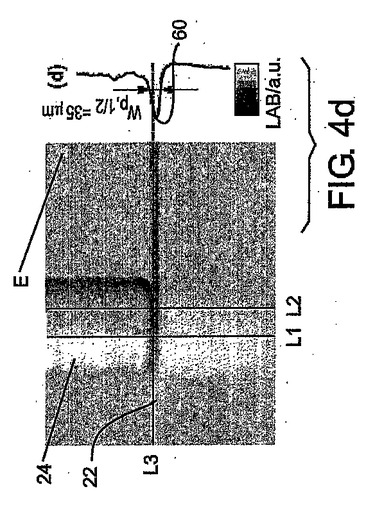
図4a〜4dを参照すると、アレイ22がプローブ先端26及び対応するZ軸位置のプロットに対するLABに接近するときの表面アレイ22の実際の取り込まれた画像の例が図示されている。図4aに示される画像は、表面アレイ22から(たとえば200〜400μm)比較的離れて配置されたプローブ24を示し、そこから得られるZ軸対輝度のプロットが、単一の低い値のLAB(すなわち、試料採取プローブ先端26のZ軸位置に対応するピーク)の画像しか示していない。プローブ先端26と表面アレイ22の間の距離が縮小すると、プローブ24の影Eは、画像の分析される部分に入り、それによって(図4b、4cで最もよく分かるように)輝度のプロットの第2のピーク58が生じる。比較すると、図4dに示される画像は、プローブ先端26と表面アレイ22の間に最適の液体のマイクロジャンクションが現れる、プローブ24と表面アレイ22の間の相対位置を示す。より具体的には、プローブ先端26と表面アレイ22の間にもはや間隙が全くないので、図4dのZ軸対輝度のプロットは、60で示される唯一の比較的広いピークを示す。
【0031】
上記に論じた画像データは、液体のマイクロジャンクションの形成を自動化し、最適なジャンクションの厚さを維持するための2つの選択肢を提示する。第1の選択肢は、表面アレイ22が、プローブ先端26とプローブの影Eの位置に対応する2つのピークが分析される画像が現れるまで、Z時軸に沿ってプローブ24に近づき、次いでZ座標軸に沿って2つのピークが一体化するのを追跡できるようにすることである。この第1の場合でのプローブから表面への距離の計算は、2つのピークの離隔距離と幅に基づく。しかし、現在行われている実験は、表面アレイ22上に現れる暗い点は、第2のピーク(すなわちプローブの影EのZ軸位置に対応するピーク)の検出に干渉するおそれがあり、表面アレイ22の平滑性が一様でない場合、第2のピークのコンピュータの判断はあまり信頼性のあるものではないことを示す。
【0032】
液体のジャンクションの制御を自動的にする第2の可能性は、第1のピークの半値全幅(FWHM)を追跡することである。この手法では、FWHMは表面アレイ22がプローブ24に近づくとき比較的一定であるが、プローブ先端26と表面の影が一体化するとき急激に増加し、その後一体が完了するとFWHM値が直線的に減少する。この方法は、プローブ先端26の縁部に示されるライン(たとえば図4a〜4dのラインL3)を実験の始めに設定することによってさらに改善される。次いで、この設定ラインL3と、Z軸のLABピーク(Wp,1/2)の表面側の半値幅との間の距離は、実際のプローブから表面アレイへの距離を決定するために監視される。この後者の調整は、プローブ先端26の縁部の信頼性のない検出を解消する。さらに、成功的な長期の自動表面試料採取実験により、設定ライン(たとえばラインL3)とZ軸の表面側の半値幅(Wp,1/2)との間の距離を監視することが液体のジャンクションの厚さを監視する好ましい手法であることが証明される。
【0033】
実際の自動表面採取実験では、プローブ先端26と表面アレイ22の間に安定した液体のマイクロジャンクションを形成かつ維持するために、最適化のためのそれぞれのソフトウェア変数を有する4つの段階がある。第1の段階では、表面アレイ22は、Z軸のLABピーク(Wp,1/2)の表面側の半値幅との間の距離が、図4dに図示され、描かれる状態に対応するプリセット値に到達するまでプローブ先端26のより近くに移動させられる。第2の段階では、表面アレイ22は、液体のジャンクションの形成を開始するために、(コンピュータ30からXYZステージ28に適切なコマンドを送ることにより)液体のジャンクションの最適な厚さよりもプローブ24にわずかな距離だけ幾分近づいて(約50から10μm最適な厚さに近い)移動させられる。第3の段階では、表面アレイ22は、安定した液体のジャンクションを形成し、質量分析法のデータの取得が開始できるようにするために、数秒(通常は約3秒)間、静止状態に保たれる。第4の段階では、表面アレイ22は、所定の最適な液体のマイクロジャンクションの厚さを確立するために、(コンピュータ30からXYZステージ28に適切なコマンドを送ることにより)プローブ24から離れて(たとえばそこから戻るように)移動させられる。この第4の段階に続いて、質量分析のデータの取得中に最適な液体のジャンクションを達成し、維持するために、事前設定の限界の間のブローブから表面アレイへの距離の連続的な監視と調整が行われる。そのような事前設定された限界は、実際のプローブから表面アレイへの距離が、所望の目的のプローブから表面アレイへの距離に対して(たとえば±3μm以内など)十分に近い可能性があるので、表面アレイ22をプローブ24に向かって又はそこから離れるようにさらに移動する必要が全くない所定の範囲に一致する。
【0034】
採集された試料の分析が関係する限り、プローブ24を介して表面アレイ22から採集された試料が質量分析計32に導かれ、そこで当技術分野で知られた様式で分析される。上記に示したように、第2の制御コンピュータ34は、表示スクリーン38と質量分析計32の動作及びデータ採集を制御するためのコマンドをコンピュータ34に入力できるキーボード39を有する。
【0035】
システム20によって行われる試料採集の動作中に、表面アレイ22がプローブ24の下で掃引してプローブ24の先端26が表面アレイ22を試料採取するように、表面アレイ22がプローブ24に対してX−Y平面内で移動するのが一般的である。この目的で、また例として、コンピュータ30は、試料を別の位置で得るために別の位置又は点がプローブ先端26と垂直に位置合わせされて配置されるように、X−Y平面内で表面アレイ22を割り出すか、又は表面アレイ22を横切って選択されるレーンに沿って表面アレイ22がプローブ24によって試料採取されるように表面アレイ22をX又はY座標軸に沿って移動させるように、予めプログラムできる。この後者の例では、また、たとえばX軸に沿ってプローブ先端26の下で表面アレイ22の単一の通過が完了したときに、表面アレイ22は、連続する試料採取目的のためにX軸に沿って先端26の下で表面アレイ22のその後の通過のために、別のX軸レーンを移動させてプローブ先端26と位置合わせするように規定の又は予めプログラムされた量だけY軸に沿って割り出す。出願人等によって行われた実験では、試料は、プローブ24によって約44μm毎秒の一定の掃引又は走査の速度で採集されるが、本発明では、試料は別の又はカスタマイズされた(すなわち様々な)走査速度で採集できる。
【0036】
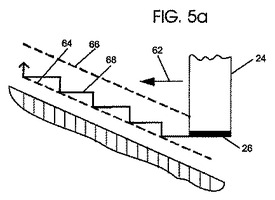
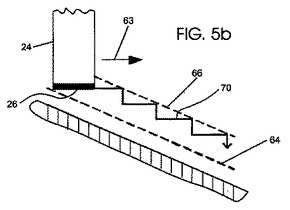
図5a、5bを参照すると、表面アレイ22が試料採集作業中にプローブ先端26の下を通過するときの表面アレイ22とプローブ先端26の間の位置関係、及びプローブから表面アレイへの位置を再び最適化する間のプローブ先端26の移動が概略的に示される。(図5a、5bの両方の中で、表面アレイ22は、例示の目的でプローブ24の長手方向軸に対して誇張された角度で示される。)より具体的には、図5aの中では、表面アレイ22とプローブ24は、試料が矢印62で示される負の(−)X軸方向に表面アレイ22のレーンから採集されるように、試料採集プロセス中に互いに対して移動させられ、図5bの中では、表面アレイ22とプローブ24は、試料が矢印63で示される正の(+)X軸方向に表面アレイ22のレーンから採集されるように、試料採集プロセス中に互いに対して移動させられる。
【0037】
その一方で、図5a、5bに示された点線64、66は外側の境界又は事前設定の限界を示し、最適な液体のマイクロジャンクションが表面アレイ22とプローブ先端26の間に維持されるようにその間にプローブ先端26が位置決めされる必要がある。言い換えれば、またプローブ24と表面アレイ22の間の離隔した距離を表面アレイ22とプローブ先端26の間に最適の液体のマイクロジャンクションが現れる距離に一致する距離に維持するために、プローブ先端26を線64よりも(Z軸に沿って)表面アレイ22のより近くに移動すべきではなく、またプローブ先端26を線66よりも表面アレイ22から遠くに移動させるべきではない。実際には、事前設定の限界(Z軸に沿って測定した)の間の離隔した距離は、(点線64、66に対応する)事前設定された限界がそれぞれ、最適の液体のマイクロジャンクションがプローブ先端26と表面アレイ22の間に現われる目標の距離から約3μmで間隔を置いて配置されるように、互いから約6μmなど数ミクロン以内である。したがって、システム20によって行われる試料採集動作中に、画像が規則的に間を取った期間で取り込まれ、上述の画像分析技術によって、プローブ先端26と表面アレイ22の間の実際の距離が決定される。
【0038】
次いで、決定された実際の距離は、コンピュータ30で作動する適切なソフトウェア70によって、プローブ先端26と表面アレイ22の間の所望の目標の距離と比較され、その目的の距離は規定の限界線64、66によって境界を定められている。実際のプローブから表面アレイへの距離が規定の線64、66内に収まるように決定される場合、Z軸に沿った表面アレイ22とプローブ先端26の相対的な移動又は調整が全く必要ない。しかし、実際のプローブから表面アレイへの距離が規定の限界線64、66上又は外側に出るように決定される場合、実際のプローブから表面へのアレイの距離を限界線64、66に対応する規定の限界内に戻すために、Z軸に沿った表面アレイ22とプローブ先端26の間の相対移動又は相対位置の調整が必要である。したがって、図5aに示される試料採集の動作中には、プローブ24が負(−)のX座標軸に沿って表面アレイ22に対して移動されると、表面アレイ22に対してプローブ先端26が追従する経路は、段になった経路68で示される可能性があるので、Z軸に沿った表面アレイ22とプローブ24の頻繁な調整を行う必要がある。
【0039】
比較すると、図5bに示される試料採集の動作中には、プローブ24が正(+)の座標軸に沿って表面アレイ22に対して移動されると、表面アレイ22に対してプローブ先端26が追従する経路は、段になった経路70で示される可能性があるので、Z軸に沿った表面アレイ22とプローブ24の頻繁な調整を行う必要がある。
【0040】
エレクトロスプレー質量分析法(ES−MS)装置を伴う表面試料採取プロセス中に、プローブから表面アレイへの距離を制御するためのシステム20とそれに関連する方法が上記に説明されたことになる。これに関連して、システム20は、画像分析を使用して試料採取プローブから表面への液体のマイクロジャンクションをリアルタイムで再び最適化することの公式化を自動化する。画像分析は、ビデオカメラ44から静止画像を定期的に取り込むことを含み、そのビデオカメラ44のレンズ45は、試料採取プローブ24の先端26に隣接する領域に向けられ、それに続いて実際の試料採取プローブから表面アレイへの距離を決定するために、取り込まれた画像の分析を行う。この実際のプローブから表面アレイへの距離を決定し、次いで実際のプローブから表面アレイへの距離をプローブ先端26と表面アレイ22の間に最適な液体のマイクロジャンクションが現れるプローブから表面アレイへの距離に対応する目標のプローブから表面アレイへの距離と比較することによって、システム20は、プローブ先端26と表面アレイ22の間の最適な液体のマイクロジャンクションを自動的に公式化し、必要に応じて、Z座標軸に沿って間隔を置いたプローブから表面への距離を調整することによって実験中にプローブから表面アレイを連続的に再び最適化することができる。所望であれば、表面アレイ22は、レーン間に等しい又はカスタマイズされた間隔を有する表面アレイ22の上の複数の平行なレーンに沿ってプローブ24による試料の自動的な採集を適合させるために、X−Y平面に沿って(またプローブ24に対して)移動する。上記に示したように、試料は一定の走査速度で上記に論じた試験中に表面アレイ22から採集されるが、試料はカスタマイズされた、又は様々な走査速度で本発明のより広い態様に従って採集できる。
【0041】
試料採集プロセス全体を通じてプローブから表面アレイへの距離を制御するためのシステム20とそれに関連する方法によってもたらされる原理的な利点は、試料採集プロセス中に、操作の介入や、プローブから表面アレイへの距離(すなわちZ座標軸に沿って)の手動制御の必要を全くなくすことに関連する。したがって、システム20によって行われる試料採集作業の正確さは試料採集プロセスを監視する必要のあるオペレータの技能によって制限されない。
【0042】
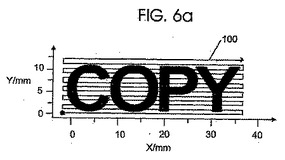
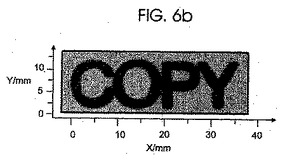
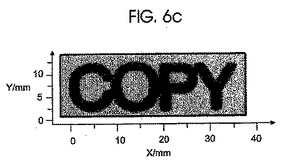
出願人等は、本明細書に説明されるシステムと方法が画像化の用途に使用できることも判断し、そのような用途が実験により実証された。たとえば、図6a〜6dを参照すると、出願人等は染色ローダミンBを含む赤インクのスタンプを使用して丈夫な紙片に単語「COPY」を転写した。図6aの画像の文字は、およそ1.0cm×3.7cmの寸法であり、図6aの画像を横切る試料採取経路(X軸に沿った複数の通路からなる)が100で示される。より具体的には、実験の中で、図6aの画像を横切って13の経路が作られ、隣接する経路の間の距離は1.0mmとして選択された。単語「COPY」がこの実験のために転写された紙は、ガラス板に固定され、ガラス板はXYZステージ28のアームの上に装着された。上述のTLCプレート27の場合と同様に、紙の表面は、所望のXY座標の始点の上に約300から400μmの間にプローブを位置決めするようにプローブに対して(すなわちZ座標軸に沿って)手動で移動させられ、次いで約88μm/秒の速度で自動走査が開始した。図6b、6cは、表面試料採取のそれぞれ前と後で取られた文字の画像である。表面からのインクの試料採取の高い効率が、図6c内で文字を通過する白いトラックによって示される。
【0043】
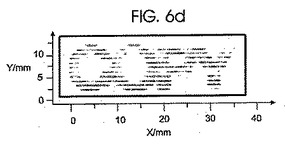
図6dは、13の走査レーンに沿って、標準化された質量分析法の選択反応監視検出(SRM)のイオン電流特性に基づいてインクで書かれた文字の画像を示す。図6dの画像のより暗い領域は、より高いSRMイオン信号を表す。走査された文字(図6c)の写真と走査された画像(図6d)の間に緊密な相関関係がある。
【0044】
図6dに提供されたデータは、取得するのに94分かかった。この合計の時間の間、表面試料採取システムは、完全にコンピュータ制御の下にあり、オペレータの介入は全く必要としない。さらに、図6dのデータは、これらの実験の読取り解像度は、単語「COPY」のインクで書かれた文字の読取り可能な画像を形成するのに十分であったことも示す。この解像度は、(たとえば、より小さなフォント文字を使用するものなど)その他の画像化の用途に適していない可能性がある。現在の試料採取プローブ(635μm外径の)では、読取り解像度は、1.0mm間隔のレーン走査から約650μm間隔のレーン走査に改善された可能性がある。さらに、レーン走査の間に必要な距離を縮小することによってさらに解像度を向上させるため、より小さな直径のプローブを使用できる。しかし、プローブ直径が縮小すると、表面から試料採取される材料がより少なくなり、信号レベルが低下する。
【0045】
本発明の趣旨から逸脱せずに多くの修正や代替を上述の実施形態に行うことができることが理解されるであろう。たとえば、プローブ24が固定された静止状態で支持され、表面アレイ22がプローブ先端26と位置合わせして所望の点又はディベロップメント・レーンを位置決めするために、X、Y、又はZ座標方向のいずれかに沿ってプローブ24に対して移動される上述の実施形態を示し、説明したが、本発明のより広い態様に従う別の実施形態は、固定された静止状態に支持された表面アレイ、及びX、Y、又はZ軸方向のどちらかに沿って表面アレイに対して移動できるプローブを伴うことができる。したがって、上述の実施形態は、限定することではなく例示することを意図している。
【図面の簡単な説明】
【0046】
【図1】本発明の特徴がその中に組み込まれるシステム20の概略図である。
【図2】多少大きな縮尺に描かれた図1の一部分の斜視図である。
【図3】本発明の方法の間に利用される画像分析が説明できる、理論上の画像の概略図(a)と図3aの理論上の画像に関するZ軸に沿ったライン平均輝度(LAB)の付随するプロット(b)である。
【図4】プローブ先端と表面アレイが互いに向かって移動されるとき図1のプローブ先端及び表面アレイの実際に取り込まれた画像、及び取り込まれた画像のそれぞれに関するライン平均輝度の付随プロットの例である。
【図5】プローブから表面アレイへの距離を連続的に再び最適化する間の図1の表面アレイに対するプローブの先端の経路の概略図である。
【図6a】紙片に表れる単語「COPY」の図である。
【図6b】図6aの画像から紙片に写された単語「COPY」の図である。
【図6c】図6aの画像から紙片に写された単語「COPY」の図である。
【図6d】図6aの画像から紙片に写された単語「COPY」の図である。
【技術分野】
【0001】
本発明は米国エネルギー省によってUT−Battelle社に与えられた契約番号DE−AC05−00OR22725に基づく米国政府の援助によって行われ、米国政府は本発明に一定の権利を有する。
【0002】
本発明は一般に試料採取の手段と方法に関し、より詳細には検体を有する表面アレイ点を試料採取する手段と方法に関する。
【背景技術】
【0003】
本出願と同じ譲受人を有する先の米国特許第6,803,566号には、検体を有する表面アレイ点の試料採取を行う、試料採取技術が開示されている。より具体的には、記載された試料採取技術は、先端の尖ったプローブと、関連する自己吸引式放出器を利用し、その放出器を通って、溶離液などの液体の薬剤が表面アレイに送出され、分析の目的で表面アレイから試料が導かれる。さらに、位置決めシステムが、プローブに対する表面アレイの位置を変えるために、X、Y座標軸(すなわち表面アレイの平面内)に沿って表面アレイを自動的に平行移動するために設けられる。言い換えれば、表面アレイをプローブに対してX、Y座標軸の方向に移動させることによって、プローブの先端は、表面アレイに沿った任意の点(すなわちX−Y座標位置)と位置合わせして配置される。その後、表面アレイとプローブの先端は、プローブの先端と表面アレイの間に液体のマイクロジャンクション(microjunction)が現れるまで互いに向かって(すなわち、Z座標軸に沿って)手動で動かすことができ、このようなプローブの表面アレイに対する状態で、アレイ上の対応する点がプローブによって試料採取される。その後、試料は適切な試験装置に導かれ、そこで試料の所望の分析が実施される。そのような試料採取技術で使用されるプローブは、特に薄層クロマトグラフィと質量分析法を結びつけるためのインターフェースとして適している。参照された特許は、タンパク質マイクロアレイが分析されるプロテオミクスの分野で有用になっているものとして試料採取技術を記載するが、その他の用途を有することができる。
【0004】
従来及び上記に示したように、最初の液体のマイクロジャンクションを形成し、その後の試験中に最適なマイクロジャンクションの厚さを維持するための、プローブの先端と表面アレイの間の(すなわちZ座標軸に沿った)間隔を置いた関係はオペレータの介入を必要とした。言い換えれば、オペレータは、試料採取の目的でプローブの先端と表面アレイとを互いに隣接させて手動で位置決めし、必要に応じて試料採取手順の間の全体を通してプローブから表面アレイへの距離を手動で調整することが求められていた。さらに、表面アレイの上の異なる点又は(たとえばX又はY座標経路に沿った)互いに異なるディベロップメント・レーン(development lanes)から複数の試料を集めることは、プローブの先端と表面アレイの間の距離のさらなるオペレータ制御による、すなわち手動の調整を伴う傾向がある。したがって、従来技術の試料採取技術の間にプローブから表面アレイへの距離を制御する間にオペレータの介入が必要である結果として、この従来技術の試料採集技術の正確さは一般に、関係するオペレータの熟練と一致したものになる。
【0005】
表面アレイ点又はディベロップメント・レーンからの試料の採集の間にプローブから表面アレイへの距離を自動的に制御する手段を使用して上述の試料採取技術を提供することが望ましい。
【発明の開示】
【発明が解決しようとする課題】
【0006】
したがって、本発明の目的は、試料採集の作業中にオペレータの介入を必要としない試料採取プローブと、プローブによって試料採取されるアレイの表面との間の距離を自動的に制御する新規の改善されたシステムと方法を提供することである。
【0007】
本発明の別の目的は、表面アレイをプローブによって試料採取する目的で、プローブと表面アレイが望ましいの空間を置いた関係で自動的に配置されるようなシステムと方法を提供することである。
【0008】
本発明の別の目的は、プローブから表面の距離が最適な間隔で維持されるように、試料採取手順の間全体を通して連続的に監視され、必要に応じて調整されるようなシステムと方法を提供することである。
【0009】
本発明の別の目的は、構造が複雑でなく、しかも動作の際に効果的であるようなシステムを提供することである。
【課題を解決するための手段】
【0010】
本発明は表面アレイから検体を含む試料を得るための試料採取システムと方法にある。
【0011】
本発明のシステムは、先端を有する試料採取プローブを備え、試料採取プローブの先端と表面アレイとの間に最適な液体のマイクロジャンクションが現れるように、表面アレイから所望の間隔を置いた目的の距離に配置された場合、分析のために表面アレイから試料採取するようになされた試料採取プローブを備える。システムは、互いに向かって、また互いから離れるように試料採取プローブ及び表面アレイを移動する手段、ならびにプローブの先端及び表面アレイの両方の画像を取り込み、取り込まれた画像に対応する信号を生成する手段をさらに備える。さらに、取り込まれた画像に対応する信号を受け取り、取り込まれた画像からプローブの先端と表面アレイの間の実際の距離を決定する手段がシステム内に含まれる。次いで、比較手段がプローブの先端と表面アレイの間の実際の距離を所望の目標の距離と比較し、プローブの先端と表面アレイの間の実際の距離と、所望の目標の距離との間の違いが所定の範囲外にある場合に、表面アレイとプローブ先端を互いに向かって、また互いから離れるように移動することによって、実際の距離が所望の目標の距離に接近するように、互いに向かって、また互いから離れる、表面アレイ及びプローブ先端の移動を開始する。
【0012】
本発明の方法は、本発明のシステムによって実施されるステップを含む。特に、そのようなステップは、プローブの先端及び表面アレイの両方の画像を取り込み、取り込まれた画像からプローブの先端と表面アレイの間の実際の距離を決定するステップを含む。次いで、プローブの先端と表面アレイの間の実際の距離は、試料を採集するための最適な液体のマイクロジャンクションがプローブ先端と表面アレイの間に現われる所望の目標の距離と比較され、それに続いて表面アレイとプローブ先端は、プローブの先端と表面アレイの間の実際の距離と、所望の目標の距離とが所定の範囲外にある場合に、表面アレイとプローブ先端を互いに向かって、また互いから離れるように移動することによって、実際の距離が所望の目標の距離に接近するように、互いに向かって、また互いから離れるように移動される。
【発明を実施するための最良の形態】
【0013】
次に、より詳しく図面に注目し、図1を考察すると、全体的に20で示され、本発明の特徴が、後続の分析のために表面アレイ22のうちの少なくとも1つの点から試料を得る目的を実現する表面試料採取エレクトロスプレー・システムの1つの実施形態が概略的に示されている。たとえば、表面アレイ22は、試料が質量分析計32によって分析されることが望ましいタンパク質マイクロアレイであり、システム20は対象になる任意のいくつかの表面を試料採取するのに使用できる。したがって、本発明の原理は、様々に適用できる。
【0014】
システム20は、表面アレイ22に近くに配置可能な先端26で終端する、一対の同心の(すなわち内側と外側の)チューブを有する試料採取プローブ24(及び関連する自己吸引式放出器25)を備える。試料採取プロセス中に、所定の液体(たとえば溶離液)がシリンジ・ポンプ37からプローブ24の外側のチューブを通って表面アレイ22の上に導かれ、採集された試料を分析する目的で所望の試料がプローブ24に内側のチューブを通って表面アレイ22の残りから所定の液体と共に導かれる。試料採取プローブ24、及び試料が後続の分析の目的で採集される方法をより完全に説明するために、その開示が参照によって本明細書に組み込まれ、本出願と同じ譲受人を有する米国特許第6,803,566号に参照を行うことができる。
【0015】
図1、2を参照し、アレイ22の表面に沿った任意の点から試料を採集できるようにするために、プローブ24はその先端26と共に、固定された静止状態で支持され、表面アレイ22は、示されたX−Y座標軸に沿って、すなわち支持プレート27の平面内で、及び示されたZ座標軸に沿ってプローブ24の先端26に向かって、またそこから離れてプローブ24に対して移動するように、支持プレート27の上方に支持される。示されたシステムの支持プレート27は、たとえば薄層クロマトグラフィ(TLC)プレートの形を取ることができ、その上に分析を所望するある量の材料が配置される。本明細書での議論の目的で、表面アレイ22は支持プレート27によってX−Y平面内に支持され、(実質的にプローブ24の長手方向軸に一致する)Z軸がX−Y平面に垂直である。
【0016】
支持プレート27と支持される表面アレイ22をX、Y、Z座標軸に沿って移動するように、支持プレート27は、オレゴン州EugeneのApplied Scientific Instrumentation社からMS2000 XYZステージの名称で市販されるものなどの、XYZステージ28(図1)の移動可能な支持アーム36に支持された形で装着される。XYZステージ28は、ジョイスティック制御ユニット29に適切に有線接続され、そのジョイスティック制御ユニット29は、システム20によって行われる試料採取プロセス中に、アレイ22がプローブ先端26の下のX−Y平面内で移動されると、表面アレイ22に沿って、又はアレイ22を横切って任意の所望のレーンに沿って(すなわちX又はY座標経路に沿って)試料を所望の点(すなわち任意の所望のX−Y座標位置)から取ることができるように、コマンド信号を受け取る(ラップトップ・コンピュータ30の形の)第1の制御コンピュータに連結される。スウィープ速度などの表面アレイ22とプローブ24のそのような相対移動の性質、及びプローブ24が表面アレイ22と位置合わせして配置されることが望ましいX−Y位置の識別を、たとえばコンピュータ・キーボード31を介してコンピュータ30に入力され、又はコンピュータ30のメモリ33内に予めプログラムできる。
【0017】
XYZステージ28の内部の構成要素の説明は、必要であると考えられないが、プローブ先端26に対する支持表面27(及び表面アレイ22)のX、Y座標位置は、たとえばXYZステージ28の内部に装着された一対の可逆のサーボモータ(図示されない)の適切な作動を介して制御され、プローブ先端26に対する支持表面27(及び表面アレイ22)のZ座標位置は、たとえばXYZステージ28の内部に装着された可逆のステップ・モータ(図示されない)の適切な作動を介して制御されると説明すれば十分であろう。したがって、X、Y座標のサーボモータに適切に電力を加えることによって、アレイ22は、プローブ24の先端26がアレイ22のX−Y座標平面内の任意の点と位置合わせして配置できるように配置でき、Z軸のステップ・モータに適切に電力を加えることによって、アレイ22は、プローブ先端26に向かって、又はそこから離れるように移動できる。
【0018】
引き続き図1を参照すると、システム20は、分析の目的でプローブ24から導かれた試料を受け入れる試料採取プローブ24に連結された質量分析計32をさらに備え、質量分析計32には、その質量分析計32の動作と機能を制御する(パーソナル・コンピュータ34の形の)第2の制御コンピュータが関連付けられている。質量分析計32として、示されたシステム20と共に使用するのに適した質量分析計の例が、4000 Qtrapの商品名でカナダ オンタリオ州ConcordのMDS SCIEXから市販されている。2つの個別のコンピュータ30、34が(質量分析計32を含む)システムの構成要素の様々な動作を制御するために、示されたシステム20内で利用されるが、システム20内で行われる動作の全ては、本発明では、1つのコンピュータを使用して制御され、あるいは、質量分析計のソフトウェア・パッケージ内に読み込まれた適切なソフトウェア・コンポーネントを介して制御できる。この後者の例では、単一のソフトウェア・パッケージがXYZステージング、画像分析、質量分析の検出を制御する。
【0019】
システム20の特徴は、プローブ24の先端26と表面アレイ22の間の間隔を置いた距離(すなわち示されたZ座標軸に沿って測定した距離)を制御するために、全体的に40で示された画像分析手段を備えることである。示されたシステム20内で、画像分析手段40は、プローブ先端26の影がアレイ22の表面の上に落ちるように先端26に向かって光のビームを送るために、プローブ先端26に隣接して支持される光源42を備える。さらに、閉回路カメラ44が、プローブ先端26の画像を採集するためにアレイ22の一方の側に支持され、影が試料採集の作業の準備と作業中にプローブ先端26によってアレイの上に落とされ、ビデオ(たとえば白黒テレビジョンなどの)モニタ46がカメラ44によって採集された画像を受け取り、表示するためにカメラ44に連結されている。モニタ46は、カメラ44によって撮影された画像に対応するコンピュータ30に信号を伝えるために、(ビデオ・キャプチャ・デバイス50を介して)ラップトップ・コンピュータ30に接続される。本明細書により詳細に説明されるように、これらの採集された画像が、プローブ24の先端26と表面アレイ22の間の実際のリアルタイムの距離を決定するのに使用される。
【0020】
さらに、システム20は、プローブ24と表面アレイ22の広角の表示をオペレータに提供するために、全体的にプローブ24と表面アレイ22に向けられたラップトップ・コンピュータ30に接続されたレンズを有するウェブカム48を備える。ウェブカム48によって採集された画像は、52で示される表示スクリーン上で見ることができ、試料採集作業の準備でプローブ24に対して表面アレイ22の最初の位置決めを容易にするためにオペレータによってラップトップ・コンピュータ30に関連付けられる。
【0021】
カメラ44として使用するのに適した閉回路カメラの例は、Panasonic GP−KR222の商品名で松下電器産業株式会社から市販されており、カメラ44は、Optem 70 XLの商品名でニューヨーク州FairportのThales Optem社から市販されているもののようなズーム・レンズ45を備えている。ビデオ・キャプチャ・デバイス50として使用するのに適したビデオ・キャプチャ・デバイスの例が、カリフォルニア州ComptonのBelkin社からBelkin USB VideoBus IIの商品名で市販されており、ウェブカム48として使用するのに適したウェブカムの例が、カリフォルニア州MilpitasのW.Creative Labs社からCreative Notebook Webcamの商品名で市販されている。
【0022】
システム20とその画像分析手段40の動作は、システムの動作の説明を通してよりよく理解することができ、システム20は、その画像分析の使用により、試料採取プローブ24の先端26と試料採取する表面アレイ22の間の液体のマイクロジャンクションの形成を開始するためにプローブ24と表面アレイ22の間の距離のリアルタイムの測定値を監視し、その後に、表面アレイ22がアレイ22に沿ったその他の点から、又はアレイ22を横切る異なるレーンから試料を採集する目的で表面アレイ22がX又はY座標軸に沿って移動されても、(Z軸に沿って測定した)最適のジャンクション距離が試料採取プロセス全体を通して維持されるように、必要に応じてラップトップ・コンピュータ30とXYZステージ28を介して実際のプローブから表面アレイへの距離に対する調整を開始する。
【0023】
システム20によって行われる試料採集作業の始めに、表面アレイ22から試料を採集する目的で、プローブ24と表面アレイ22の間の最適なマイクロジャンクションの厚さが提示される距離に対応するプローブから表面アレイへの所望の距離が、ラップトップ・コンピュータ30のメモリ33内に予めプログラムされる。最適なマイクロジャンクションの厚さは、試料採取されることが望まれる様々な材料(たとえば溶液組成など)の間で変わり、出願人らは、実験的に、試料採取されることが望まれる様々な材料の数に関する最適なマイクロジャンクションの厚さを決定した。そのような最適な厚さは、たとえば20から50μmの間に収まる。出願人等によって開発され、コンピュータ30内に読み込まれた適切なソフトウェアによって、オペレータは、試料採取される表面アレイ22を構成する材料を(コンピュータが作成した使用可能な材料のリストから)特定することができ、コンピュータ30は、その材料に関する最適なマイクロジャンクションの厚さと、付随するプローブから表面アレイへの距離とを自動的に特定する。本明細書で明らかになるように、この予め定められた付随するプローブから表面アレイへの距離は、プローブ先端26及び表面アレイ22が間隔を置くことが望まれる目的の距離を与え、システム40によって行われる画像分析プロセスの間、実際の又はリアルタイムのプローブから表面アレイへの距離が、表面アレイ22に関する最適なマイクロジャンクションの厚さに相当する所望の目標のプローブから表面アレイへの距離と比較される。
【0024】
システム20による画像分析の準備において、オペレータは、XYZステージ28が表面アレイ22がプローブ24の先端26から間隔を置くが、そこに比較的近接して配置されるまで、表面アレイ22をZ軸に沿ってプローブ先端26に向かって移動するように、ラップトップ・コンピュータ30内に適切な位置決めコマンドを入力する。このセットアップ段階の間、表面アレイ22とプローブ先端26の間の相対位置は、ウェブカム48を介して得られる画像を視認するオペレータによって視覚的に監視され、アレイ22がプローブ先端26に近づきすぎないようにラップトップ表示スクリーン52上に表示される。言い換えれば、アレイ22がプローブ先端26にあまりにも近づいてプローブから表面アレイへの距離が目標の距離より小さくなる危険を低下するために、アレイ22は、このセットアップ段階中にプローブ先端26にこれ以上、たとえば約400μmよりも近づかない。
【0025】
表面アレイ22がこのセットアップ段階中にプローブ先端26の約400μm内に行った後に、XYZステージ28が表面アレイ22を(Z座標軸に沿って)プローブ先端26のより近くに移動させ、光ビームが光源42からプローブ24に向かって送られ、それによってプローブ先端26の影が表面アレイ22上に落とされるように、オペレータは、ラップトップ・コンピュータ30のキーボード31を介してコンピュータ30に適切なコマンドを入力する。アレイ22がプローブ先端26の近くに移動されると、プローブ先端26と表面アレイ22の連続的な画像、より具体的にはその上に落とされるプローブ先端26の影が、カメラ44によって取り込まれ、又は撮影される。取り込まれたこれらの画像に対応する電気信号がラップトップ・コンピュータ30に即座に伝達され、そこでこれらの画像のうちの選択された1つに画像分析が行われる。本発明では、表現「取り込まれた画像のうちの選択された1つ」は、予め選択されかつ一定の間を空けた時間間隔(たとえば1.5秒毎)で取り込まれた画像を意味し、分析のために選択されたこれらの画像の間の時間間隔は、ラップトップ・コンピュータ30に予めプログラムされ、又はそこで選択できる。
【0026】
同じ線に沿って、また、取り込まれた画像のうちの選択された1つから、ラップトップ・コンピュータ30は、各画像に対してコンピュータ30内に読み込まれた適切なプログラムによって、Z軸に沿った各画像のライン平均輝度(average line brightness:LAB)のプロットを作成する。その後、これらのLABのプロットは、プローブ先端26と表面アレイ22の間リアルタイム又は実際の、間隔を置いた距離を決定するのに利用できる。
【0027】
例として、図3aにプローブ先端26と試料採取される表面アレイ22の例示の9画素の幅と19画素の高さの取り込まれた画像の概略図が示される。図3aの画像内で、「A」で示す領域は背景であり、「B」で示す領域はプローブの画像の試験されない部分であり、コンピュータ30によって分析された図3aの「C」で示す領域が、2つの垂直な線L1とL2の間にある。さらに、「D」で示す部分は液体/プローブ境界面である。加えられた光源42からの適切な照明によって、プローブ先端26と表面アレイ22の画像が取り込まれると、その結果生じる試料採取プローブ24と表面アレイ22の画像は、(たとえば溶離液などの)液体材料が先端26からわずかに突出するプローブ先端26の画像よりも明るい。ラインL1とL2の間に延びている、56で示される水平ラインに沿った画素の輝度は、コンピュータ30によって合計される(たとえば図3aの例示の画像に円54によって印された、ライン毎の3つの画素)。この計算された(すなわち足し合わされた合計)の値は、水平ラインの平均輝度を示し、これらのライン平均輝度(LAB)の値は、図3bに示されるグラフを得るためにZ軸位置に対して(すなわちプローブから表面アレイへの方向に沿って)プロットされる。
【0028】
取り込まれた画像の任意の画素の輝度を、システム20がどのように測定するかに関する限りは、画像の画素は赤、緑、青の成分から構成されることに注目すべきである。システム20、又はより具体的にはコンピュータ30は、赤、緑、青の成分のそれぞれの強度を特定し、次いでLAB分析に使用する輝度値を得るためにこれらの構成要素の強度を共に加える。緑色などの表面アレイの特定の色が画像分析を乱すことが判断されると、(たとえば、現在の例でLAB分析に使用する輝度値を得るために、赤と青の成分のみの強度を共に加えるが、緑の強度は加えない)ソフトウェア内に生じる画像から画素の強度を計算する適切なフィルタ・アルゴリズムを適用できる。この後者の、分析される画像の画素から緑色が除去された場合では、輝度は画像の赤の成分の強度と青の成分の強度の単純に足し合わせたものとして定義できる。画像を改善し、それによって画像分析の結果に有利な影響を与えるために、望まれるようにコンピュータ30内で多くのタイプのフィルタリング又は画像操作を行っても良い。
【0029】
プロットされたLABは、試験された範囲の輝度と最も暗いLAB値に対して標準化される。図3aの画像から、最も低いLABが得られる水平ライン(そのラインは、図3aの56a、56bで示される)が、プローブ先端26のZ軸位置、及び表面アレイ22上にEで示されるプローブ24のZ軸位置の影に対応することが理解できるであろう。本明細書で明らかになるように、最も低いLABが得られるこれらの(2つの)水平ライン56a、56bの間隔を置いた距離は、プローブ24と表面アレイ22の間の実際の間隔を置いた距離を計算するのに使用される。たとえば、水平ライン56aと56bの間にある各画像の画素が実際の5μmの間隔に相当することが分かれば、その場合、水平ライン56aと56bの間に3画素がある画像は、プローブ24と表面アレイ22が実際に15μmの距離で離隔していることを示す。そのような分析目的に関しては、ラップトップ・コンピュータ30のメモリ33は、取り込まれた画像の画素当たりの実際の離隔した距離に関連する情報を予めプログラムされている。
【0030】
図4a〜4dを参照すると、アレイ22がプローブ先端26及び対応するZ軸位置のプロットに対するLABに接近するときの表面アレイ22の実際の取り込まれた画像の例が図示されている。図4aに示される画像は、表面アレイ22から(たとえば200〜400μm)比較的離れて配置されたプローブ24を示し、そこから得られるZ軸対輝度のプロットが、単一の低い値のLAB(すなわち、試料採取プローブ先端26のZ軸位置に対応するピーク)の画像しか示していない。プローブ先端26と表面アレイ22の間の距離が縮小すると、プローブ24の影Eは、画像の分析される部分に入り、それによって(図4b、4cで最もよく分かるように)輝度のプロットの第2のピーク58が生じる。比較すると、図4dに示される画像は、プローブ先端26と表面アレイ22の間に最適の液体のマイクロジャンクションが現れる、プローブ24と表面アレイ22の間の相対位置を示す。より具体的には、プローブ先端26と表面アレイ22の間にもはや間隙が全くないので、図4dのZ軸対輝度のプロットは、60で示される唯一の比較的広いピークを示す。
【0031】
上記に論じた画像データは、液体のマイクロジャンクションの形成を自動化し、最適なジャンクションの厚さを維持するための2つの選択肢を提示する。第1の選択肢は、表面アレイ22が、プローブ先端26とプローブの影Eの位置に対応する2つのピークが分析される画像が現れるまで、Z時軸に沿ってプローブ24に近づき、次いでZ座標軸に沿って2つのピークが一体化するのを追跡できるようにすることである。この第1の場合でのプローブから表面への距離の計算は、2つのピークの離隔距離と幅に基づく。しかし、現在行われている実験は、表面アレイ22上に現れる暗い点は、第2のピーク(すなわちプローブの影EのZ軸位置に対応するピーク)の検出に干渉するおそれがあり、表面アレイ22の平滑性が一様でない場合、第2のピークのコンピュータの判断はあまり信頼性のあるものではないことを示す。
【0032】
液体のジャンクションの制御を自動的にする第2の可能性は、第1のピークの半値全幅(FWHM)を追跡することである。この手法では、FWHMは表面アレイ22がプローブ24に近づくとき比較的一定であるが、プローブ先端26と表面の影が一体化するとき急激に増加し、その後一体が完了するとFWHM値が直線的に減少する。この方法は、プローブ先端26の縁部に示されるライン(たとえば図4a〜4dのラインL3)を実験の始めに設定することによってさらに改善される。次いで、この設定ラインL3と、Z軸のLABピーク(Wp,1/2)の表面側の半値幅との間の距離は、実際のプローブから表面アレイへの距離を決定するために監視される。この後者の調整は、プローブ先端26の縁部の信頼性のない検出を解消する。さらに、成功的な長期の自動表面試料採取実験により、設定ライン(たとえばラインL3)とZ軸の表面側の半値幅(Wp,1/2)との間の距離を監視することが液体のジャンクションの厚さを監視する好ましい手法であることが証明される。
【0033】
実際の自動表面採取実験では、プローブ先端26と表面アレイ22の間に安定した液体のマイクロジャンクションを形成かつ維持するために、最適化のためのそれぞれのソフトウェア変数を有する4つの段階がある。第1の段階では、表面アレイ22は、Z軸のLABピーク(Wp,1/2)の表面側の半値幅との間の距離が、図4dに図示され、描かれる状態に対応するプリセット値に到達するまでプローブ先端26のより近くに移動させられる。第2の段階では、表面アレイ22は、液体のジャンクションの形成を開始するために、(コンピュータ30からXYZステージ28に適切なコマンドを送ることにより)液体のジャンクションの最適な厚さよりもプローブ24にわずかな距離だけ幾分近づいて(約50から10μm最適な厚さに近い)移動させられる。第3の段階では、表面アレイ22は、安定した液体のジャンクションを形成し、質量分析法のデータの取得が開始できるようにするために、数秒(通常は約3秒)間、静止状態に保たれる。第4の段階では、表面アレイ22は、所定の最適な液体のマイクロジャンクションの厚さを確立するために、(コンピュータ30からXYZステージ28に適切なコマンドを送ることにより)プローブ24から離れて(たとえばそこから戻るように)移動させられる。この第4の段階に続いて、質量分析のデータの取得中に最適な液体のジャンクションを達成し、維持するために、事前設定の限界の間のブローブから表面アレイへの距離の連続的な監視と調整が行われる。そのような事前設定された限界は、実際のプローブから表面アレイへの距離が、所望の目的のプローブから表面アレイへの距離に対して(たとえば±3μm以内など)十分に近い可能性があるので、表面アレイ22をプローブ24に向かって又はそこから離れるようにさらに移動する必要が全くない所定の範囲に一致する。
【0034】
採集された試料の分析が関係する限り、プローブ24を介して表面アレイ22から採集された試料が質量分析計32に導かれ、そこで当技術分野で知られた様式で分析される。上記に示したように、第2の制御コンピュータ34は、表示スクリーン38と質量分析計32の動作及びデータ採集を制御するためのコマンドをコンピュータ34に入力できるキーボード39を有する。
【0035】
システム20によって行われる試料採集の動作中に、表面アレイ22がプローブ24の下で掃引してプローブ24の先端26が表面アレイ22を試料採取するように、表面アレイ22がプローブ24に対してX−Y平面内で移動するのが一般的である。この目的で、また例として、コンピュータ30は、試料を別の位置で得るために別の位置又は点がプローブ先端26と垂直に位置合わせされて配置されるように、X−Y平面内で表面アレイ22を割り出すか、又は表面アレイ22を横切って選択されるレーンに沿って表面アレイ22がプローブ24によって試料採取されるように表面アレイ22をX又はY座標軸に沿って移動させるように、予めプログラムできる。この後者の例では、また、たとえばX軸に沿ってプローブ先端26の下で表面アレイ22の単一の通過が完了したときに、表面アレイ22は、連続する試料採取目的のためにX軸に沿って先端26の下で表面アレイ22のその後の通過のために、別のX軸レーンを移動させてプローブ先端26と位置合わせするように規定の又は予めプログラムされた量だけY軸に沿って割り出す。出願人等によって行われた実験では、試料は、プローブ24によって約44μm毎秒の一定の掃引又は走査の速度で採集されるが、本発明では、試料は別の又はカスタマイズされた(すなわち様々な)走査速度で採集できる。
【0036】
図5a、5bを参照すると、表面アレイ22が試料採集作業中にプローブ先端26の下を通過するときの表面アレイ22とプローブ先端26の間の位置関係、及びプローブから表面アレイへの位置を再び最適化する間のプローブ先端26の移動が概略的に示される。(図5a、5bの両方の中で、表面アレイ22は、例示の目的でプローブ24の長手方向軸に対して誇張された角度で示される。)より具体的には、図5aの中では、表面アレイ22とプローブ24は、試料が矢印62で示される負の(−)X軸方向に表面アレイ22のレーンから採集されるように、試料採集プロセス中に互いに対して移動させられ、図5bの中では、表面アレイ22とプローブ24は、試料が矢印63で示される正の(+)X軸方向に表面アレイ22のレーンから採集されるように、試料採集プロセス中に互いに対して移動させられる。
【0037】
その一方で、図5a、5bに示された点線64、66は外側の境界又は事前設定の限界を示し、最適な液体のマイクロジャンクションが表面アレイ22とプローブ先端26の間に維持されるようにその間にプローブ先端26が位置決めされる必要がある。言い換えれば、またプローブ24と表面アレイ22の間の離隔した距離を表面アレイ22とプローブ先端26の間に最適の液体のマイクロジャンクションが現れる距離に一致する距離に維持するために、プローブ先端26を線64よりも(Z軸に沿って)表面アレイ22のより近くに移動すべきではなく、またプローブ先端26を線66よりも表面アレイ22から遠くに移動させるべきではない。実際には、事前設定の限界(Z軸に沿って測定した)の間の離隔した距離は、(点線64、66に対応する)事前設定された限界がそれぞれ、最適の液体のマイクロジャンクションがプローブ先端26と表面アレイ22の間に現われる目標の距離から約3μmで間隔を置いて配置されるように、互いから約6μmなど数ミクロン以内である。したがって、システム20によって行われる試料採集動作中に、画像が規則的に間を取った期間で取り込まれ、上述の画像分析技術によって、プローブ先端26と表面アレイ22の間の実際の距離が決定される。
【0038】
次いで、決定された実際の距離は、コンピュータ30で作動する適切なソフトウェア70によって、プローブ先端26と表面アレイ22の間の所望の目標の距離と比較され、その目的の距離は規定の限界線64、66によって境界を定められている。実際のプローブから表面アレイへの距離が規定の線64、66内に収まるように決定される場合、Z軸に沿った表面アレイ22とプローブ先端26の相対的な移動又は調整が全く必要ない。しかし、実際のプローブから表面アレイへの距離が規定の限界線64、66上又は外側に出るように決定される場合、実際のプローブから表面へのアレイの距離を限界線64、66に対応する規定の限界内に戻すために、Z軸に沿った表面アレイ22とプローブ先端26の間の相対移動又は相対位置の調整が必要である。したがって、図5aに示される試料採集の動作中には、プローブ24が負(−)のX座標軸に沿って表面アレイ22に対して移動されると、表面アレイ22に対してプローブ先端26が追従する経路は、段になった経路68で示される可能性があるので、Z軸に沿った表面アレイ22とプローブ24の頻繁な調整を行う必要がある。
【0039】
比較すると、図5bに示される試料採集の動作中には、プローブ24が正(+)の座標軸に沿って表面アレイ22に対して移動されると、表面アレイ22に対してプローブ先端26が追従する経路は、段になった経路70で示される可能性があるので、Z軸に沿った表面アレイ22とプローブ24の頻繁な調整を行う必要がある。
【0040】
エレクトロスプレー質量分析法(ES−MS)装置を伴う表面試料採取プロセス中に、プローブから表面アレイへの距離を制御するためのシステム20とそれに関連する方法が上記に説明されたことになる。これに関連して、システム20は、画像分析を使用して試料採取プローブから表面への液体のマイクロジャンクションをリアルタイムで再び最適化することの公式化を自動化する。画像分析は、ビデオカメラ44から静止画像を定期的に取り込むことを含み、そのビデオカメラ44のレンズ45は、試料採取プローブ24の先端26に隣接する領域に向けられ、それに続いて実際の試料採取プローブから表面アレイへの距離を決定するために、取り込まれた画像の分析を行う。この実際のプローブから表面アレイへの距離を決定し、次いで実際のプローブから表面アレイへの距離をプローブ先端26と表面アレイ22の間に最適な液体のマイクロジャンクションが現れるプローブから表面アレイへの距離に対応する目標のプローブから表面アレイへの距離と比較することによって、システム20は、プローブ先端26と表面アレイ22の間の最適な液体のマイクロジャンクションを自動的に公式化し、必要に応じて、Z座標軸に沿って間隔を置いたプローブから表面への距離を調整することによって実験中にプローブから表面アレイを連続的に再び最適化することができる。所望であれば、表面アレイ22は、レーン間に等しい又はカスタマイズされた間隔を有する表面アレイ22の上の複数の平行なレーンに沿ってプローブ24による試料の自動的な採集を適合させるために、X−Y平面に沿って(またプローブ24に対して)移動する。上記に示したように、試料は一定の走査速度で上記に論じた試験中に表面アレイ22から採集されるが、試料はカスタマイズされた、又は様々な走査速度で本発明のより広い態様に従って採集できる。
【0041】
試料採集プロセス全体を通じてプローブから表面アレイへの距離を制御するためのシステム20とそれに関連する方法によってもたらされる原理的な利点は、試料採集プロセス中に、操作の介入や、プローブから表面アレイへの距離(すなわちZ座標軸に沿って)の手動制御の必要を全くなくすことに関連する。したがって、システム20によって行われる試料採集作業の正確さは試料採集プロセスを監視する必要のあるオペレータの技能によって制限されない。
【0042】
出願人等は、本明細書に説明されるシステムと方法が画像化の用途に使用できることも判断し、そのような用途が実験により実証された。たとえば、図6a〜6dを参照すると、出願人等は染色ローダミンBを含む赤インクのスタンプを使用して丈夫な紙片に単語「COPY」を転写した。図6aの画像の文字は、およそ1.0cm×3.7cmの寸法であり、図6aの画像を横切る試料採取経路(X軸に沿った複数の通路からなる)が100で示される。より具体的には、実験の中で、図6aの画像を横切って13の経路が作られ、隣接する経路の間の距離は1.0mmとして選択された。単語「COPY」がこの実験のために転写された紙は、ガラス板に固定され、ガラス板はXYZステージ28のアームの上に装着された。上述のTLCプレート27の場合と同様に、紙の表面は、所望のXY座標の始点の上に約300から400μmの間にプローブを位置決めするようにプローブに対して(すなわちZ座標軸に沿って)手動で移動させられ、次いで約88μm/秒の速度で自動走査が開始した。図6b、6cは、表面試料採取のそれぞれ前と後で取られた文字の画像である。表面からのインクの試料採取の高い効率が、図6c内で文字を通過する白いトラックによって示される。
【0043】
図6dは、13の走査レーンに沿って、標準化された質量分析法の選択反応監視検出(SRM)のイオン電流特性に基づいてインクで書かれた文字の画像を示す。図6dの画像のより暗い領域は、より高いSRMイオン信号を表す。走査された文字(図6c)の写真と走査された画像(図6d)の間に緊密な相関関係がある。
【0044】
図6dに提供されたデータは、取得するのに94分かかった。この合計の時間の間、表面試料採取システムは、完全にコンピュータ制御の下にあり、オペレータの介入は全く必要としない。さらに、図6dのデータは、これらの実験の読取り解像度は、単語「COPY」のインクで書かれた文字の読取り可能な画像を形成するのに十分であったことも示す。この解像度は、(たとえば、より小さなフォント文字を使用するものなど)その他の画像化の用途に適していない可能性がある。現在の試料採取プローブ(635μm外径の)では、読取り解像度は、1.0mm間隔のレーン走査から約650μm間隔のレーン走査に改善された可能性がある。さらに、レーン走査の間に必要な距離を縮小することによってさらに解像度を向上させるため、より小さな直径のプローブを使用できる。しかし、プローブ直径が縮小すると、表面から試料採取される材料がより少なくなり、信号レベルが低下する。
【0045】
本発明の趣旨から逸脱せずに多くの修正や代替を上述の実施形態に行うことができることが理解されるであろう。たとえば、プローブ24が固定された静止状態で支持され、表面アレイ22がプローブ先端26と位置合わせして所望の点又はディベロップメント・レーンを位置決めするために、X、Y、又はZ座標方向のいずれかに沿ってプローブ24に対して移動される上述の実施形態を示し、説明したが、本発明のより広い態様に従う別の実施形態は、固定された静止状態に支持された表面アレイ、及びX、Y、又はZ軸方向のどちらかに沿って表面アレイに対して移動できるプローブを伴うことができる。したがって、上述の実施形態は、限定することではなく例示することを意図している。
【図面の簡単な説明】
【0046】
【図1】本発明の特徴がその中に組み込まれるシステム20の概略図である。
【図2】多少大きな縮尺に描かれた図1の一部分の斜視図である。
【図3】本発明の方法の間に利用される画像分析が説明できる、理論上の画像の概略図(a)と図3aの理論上の画像に関するZ軸に沿ったライン平均輝度(LAB)の付随するプロット(b)である。
【図4】プローブ先端と表面アレイが互いに向かって移動されるとき図1のプローブ先端及び表面アレイの実際に取り込まれた画像、及び取り込まれた画像のそれぞれに関するライン平均輝度の付随プロットの例である。
【図5】プローブから表面アレイへの距離を連続的に再び最適化する間の図1の表面アレイに対するプローブの先端の経路の概略図である。
【図6a】紙片に表れる単語「COPY」の図である。
【図6b】図6aの画像から紙片に写された単語「COPY」の図である。
【図6c】図6aの画像から紙片に写された単語「COPY」の図である。
【図6d】図6aの画像から紙片に写された単語「COPY」の図である。
【特許請求の範囲】
【請求項1】
検体を有する表面アレイから試料採取する試料採取システムであって、
試料採取プローブの先端と前記表面アレイとの間に最適な液体のマイクロジャンクションが現れるように、前記表面アレイから所望の間隔を置いた距離に配置されて、分析のために前記表面アレイから試料採取するようにされた、先端を有する試料採取プローブと、
前記試料採取プローブと前記表面アレイを互いに向かって、また互いから離れるように移動させる手段と、
前記プローブの前記先端と前記表面アレイの両方の画像を取り込み、前記取り込まれた画像に対応する信号を生成する手段と、
前記取り込まれた画像に対応する前記信号を受け取り、前記取り込まれた画像から前記プローブの前記先端と前記表面アレイの間の実際の距離を決定する手段と、
前記プローブの前記先端と前記表面アレイの間の実際の距離を所望の目標の距離と比較し、前記プローブの前記先端と前記表面アレイの間の実際の距離と、所望の距離との間の違いが所定の範囲外にある場合に、前記表面アレイと前記プローブ先端を互いに向かって、また互いから離れるように移動させることによって、実際の目標の距離が所望の距離に接近するように、互いに向かって、また互いから離れるように前記表面アレイと前記プローブ先端の移動を開始させる比較手段とを備える試料採取システム。
【請求項2】
前記プローブによって試料採取される前記表面アレイが、実質的にX−Y平面内に配置され、Z座標軸に沿って前記プローブから間隔を置いて配置され、前記表面アレイに沿ったいくつかの座標位置のうちの全てが試料採取の目的で前記プローブの前記先端と位置合わせすることができるように、前記表面アレイと前記プローブを互いに向かって、また互いから離れるように前記表面アレイと前記プローブを移動させる前記手段が、前記表面アレイを前記X−Y平面内で前記プローブに対して移動させる手段をさらに備える請求項1に記載のシステム。
【請求項3】
前記プローブ先端の影が前記表面アレイ上に落とされ、前記画像を取り込む手段の表面によって取り込まれた前記画像が前記プローブ先端と前記プローブ先端の前記影の両方を含むように、画像を取り込むための前記手段が光ビームを前記プローブ先端に向けて送る手段を備える請求項1に記載のシステム。
【請求項4】
前記プローブの前記先端と前記表面アレイの間の実際の距離を決定する前記手段が、前記プローブ先端の画像が取り込まれた位置と前記プローブ先端の前記影のうちの少なくとも1つを利用する請求項3に記載のシステム。
【請求項5】
決定するための前記手段が、前記プローブの先端と前記表面アレイの間の実際の距離を決定するためにカメラが取り込んだ画像にライン平均輝度(LAB)技術を利用するようにされた請求項4に記載のシステム。
【請求項6】
分析のために表面アレイから試料採取する表面試料採取システムであって、前記システムが先端を有する試料採取プローブを備え、前記表面アレイがそのアレイによって試料採取され、前記プローブの前記先端と、試料採取の目的で前記プローブ先端と前記表面アレイの間に最適な液体のマイクロジャンクションが現れる前記表面アレイとの間の所望の目標の距離が存在する表面試料採取システムにおいて、
試料採取の目的で、前記最適な液体のマイクロジャンクションが前記プローブ先端と前記表面アレイの間に現れる、前記プローブの前記先端と前記表面アレイの間の所望の目標の距離に関連する情報を含むコンピュータと、
前記コンピュータから受け取ったコマンドに応答して、前記表面アレイと前記プローブの前記先端を、互いに向かって、また互いから離れるように移動させるために、前記コンピュータに接続された手段と、
前記プローブの前記先端と前記表面アレイの両方の画像を取り込み、前記取り込まれた画像に対応する信号を前記コンピュータに送る手段と、
前記コンピュータが、前記取り込まれた画像に対応する前記信号を受け取り、前記取り込まれた画像から前記プローブの前記先端と前記表面アレイの間の実際の距離を決定する手段を備え、
前記コンピュータが、前記プローブの前記先端と前記表面アレイの間の実際の距離を目標の距離と比較し、前記プローブの前記先端と前記表面アレイの間の実際の距離が所定の範囲外にある場合に、実際の距離が目標の距離に接近するように、互いに向かって、また互いから離れるように前記表面アレイと前記プローブ先端の移動を開始させる比較手段をさらに備える表面試料採取システム。
【請求項7】
前記表面アレイが、実質的にX−Y平面内に配置され、Z座標軸に沿って前記プローブから間隔を置いて配置され、前記表面アレイと前記プローブを互いに向かって、また互いから離れるように移動させる前記手段が、前記表面アレイに沿ったいくつかの座標位置のうちの全てが試料採取の目的で前記プローブの前記先端と位置合わせすることができるように、前記表面アレイを前記X−Y平面内で前記プローブに対して移動させる手段をさらに備える請求項6に記載のシステム。
【請求項8】
前記プローブ先端の影が前記表面アレイ上に落とされ、前記画像を取り込む手段の表面によって取り込まれた前記画像が前記プローブ先端と前記プローブ先端の前記影の両方を含むように、画像を取り込むための前記手段が、光ビームを前記プローブ先端に向けて送る手段を備える請求項6に記載のシステム。
【請求項9】
前記プローブの前記先端と前記表面アレイの間の実際の距離を決定する前記手段が、前記プローブ先端の画像が取り込まれた位置と前記プローブ先端の前記影のうちの少なくとも1つを利用する請求項8に記載のシステム。
【請求項10】
決定するための前記手段が、前記プローブの先端と前記表面アレイの間の実際の距離を決定するためにカメラが取り込んだ画像にライン平均輝度(LAB)技術を利用するようにされた請求項9に記載のシステム。
【請求項11】
検体を含む表面アレイから試料採取する方法であって、
試料採取プローブの先端と前記表面アレイとの間に最適な液体のマイクロジャンクションが現れるように、前記プローブの前記先端が前記表面アレイから所望の間隔を置いた目標の距離に配置されて、分析のために表面アレイから試料採取するようにされた、先端を有する試料採取プローブを用意するステップと、
前記試料採取プローブと前記表面アレイが互いに向かって、また互いから離れるように移動できるように、前記プローブと前記表面アレイを互いに対して支持するステップと、
前記プローブの前記先端と前記表面アレイの両方の画像を取り込むステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離を前記取り込まれた画像から決定するステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離を所望の目標の距離と比較し、前記プローブの前記先端と前記表面アレイの間の実際の距離と、所望の目標の距離との間の違いが所定の範囲外にある場合に、前記表面アレイと前記プローブ先端を互いに向かって、また互いから離れるように移動させることによって、実際の距離が所望の目標の距離に接近するように、互いに向かって、また互いから離れるように前記表面アレイと前記プローブ先端の移動を開始するステップとを含む方法。
【請求項12】
前記プローブ先端の影が前記表面アレイ上に落とされ、前記画像を取り込むステップの間に取り込まれた前記画像が前記プローブ先端と前記プローブ先端の前記影の両方を含むように、画像を取り込むための前記ステップが、光ビームを前記プローブ先端に向けて送るステップを含む請求項11に記載の方法。
【請求項13】
前記プローブの前記先端と前記表面アレイの間の実際の距離を決定する前記ステップが、前記プローブの画像が取り込まれた位置と前記プローブ先端の前記影のうちの少なくとも1つを利用する請求項12に記載の方法。
【請求項14】
決定する前記ステップが、前記プローブ先端と前記表面アレイの間の実際の距離を決定するためにカメラが取り込んだ画像にライン平均輝度(LAB)技術を適用するようにされた請求項12に記載の方法。
【請求項15】
分析のために表面アレイから試料採取する方法であって、前記方法が先端を有する試料採取プローブの使用を伴い、それによって前記表面アレイが試料採取され、前記プローブの前記先端と、試料採取の目的で前記プローブ先端と前記表面アレイの間に最適な液体のマイクロジャンクションが現れる前記表面アレイとの間の所望の間隔を置いた目標の距離が存在する表面試料採取方法において、
前記プローブの前記先端と前記表面アレイの両方の画像を取り込むステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離を前記取り込まれた画像から決定するステップと、
試料採取の目的で、前記プローブの前記先端と前記表面アレイとの間の実際の距離と、前記最適な液体のマイクロジャンクションが前記プローブ先端と前記表面アレイの間に現れる、前記所望の目標の距離とを比較するステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離と、所望の目標の距離が所定の範囲外にある場合に、実際の距離が目標の距離に接近するように、前記表面アレイと前記プローブ先端を互いに向かって、また互いから離れるように移動させるステップとを含む方法。
【請求項16】
取り込み、決定し、比較し、移動させる前記ステップが、前記プローブ先端と前記表面アレイの間の実際の距離が前記目標の距離の所定の範囲内になるまで、必要に応じて繰り返される請求項15に記載の方法。
【請求項17】
前記表面アレイの別の位置が前記プローブ先端と位置合わせされ、前記試料採取プロセス中に、前記プローブ先端と前記表面アレイの間の実際の距離が目標の距離の所定の範囲内に維持されるように、取り込み、決定し、比較し、移動させる前記ステップが、前記表面アレイと前記プローブ先端を互いに対して移動させることを伴う試料採取プロセス中に実施される請求項15に記載の方法。
【請求項18】
前記プローブ先端の影が前記表面アレイ上に落とされ、画像を取り込むステップの間に取り込まれた前記画像が前記プローブ先端と前記プローブ先端の前記影の両方を含むように、画像を取り込むための前記ステップが光ビームを前記プローブ先端に向けて送るステップを含む請求項15に記載の方法。
【請求項19】
決定する前記ステップが、前記プローブの画像が取り込まれた位置と前記プローブ先端の前記影のうちの少なくとも1つを利用する請求項15に記載の方法。
【請求項20】
決定するための前記手段が、前記プローブの先端と前記表面アレイの間の実際の距離を決定するために、カメラが取り込んだ画像にライン平均輝度(LAB)技術を適用する請求項19に記載の方法。
【請求項21】
検体を含む表面アレイから試料採取する方法であって、前記方法が、
前記試料採取プローブの前記先端と前記表面アレイとの間に最適な液体のマイクロジャンクションが現れるように、前記プローブの前記先端が前記表面アレイから所望の間隔を置いた目標の距離に配置されて、分析のために表面アレイから試料採取するようにされた、先端を有する試料採取プローブを用意するステップと、
前記試料採取プローブと前記表面アレイが互いに向かって、また互いから離れるように移動できるように、前記プローブと前記表面アレイを互いに対して支持するステップと、
前記プローブの前記先端と前記表面アレイの両方の画像を取り込むステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離を前記取り込まれた画像から決定するステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離が所望の目標の距離よりもわずかに小さい1つの状態に前記表面アレイと前記プローブの前記先端を互いに対して移動させるステップと、
前記プローブ先端と前記表面アレイを互いに対して静止した関係に所定の時間の間、前記1つの状態に維持するステップと、
前記表面アレイと前記プローブ先端を互いから移動させるステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離を所望の目標の距離と比較するステップと、
前記表面アレイと前記プローブ先端の間の実際の距離が、目標の距離が所定の範囲内にある場合に、前記表面アレイと前記プローブ先端が互いから離れるように移動させるのを停止させるステップとを含む方法。
【請求項22】
前記表面アレイと前記プローブ先端の間の実際の距離が目標の距離の所定の範囲内になるように前記表面アレイと前記プローブ先端を移動させるステップの後に、
試料採取の目的で前記表面アレイの別の位置を前記プローブ先端と位置合わせするために前記表面アレイと前記プローブを互いに対して移動させるステップと、
前記プローブの前記先端と前記表面アレイの追加の画像を取り込むために取込みの前記ステップが繰り返されるとき、前記表面アレイと前記プローブ先端を所定の目標の距離の範囲内に維持するステップであって、前記追加の画像のそれぞれに関する前記表面アレイと前記プローブ先端の間の実際の距離を決定するため、前記追加の画像に決定する前記ステップが実施され、前記追加の画像のそれぞれに関して決定された実際の距離を目標の距離と比較するために比較する前記ステップが繰り返されるステップと、
実際の距離が前記比較するステップの間に目標の距離の所定の範囲外になるように常に決定される場合に、前記表面アレイと前記プローブ先端の間の実際の距離を目標の距離に近づけるために、前記表面アレイとプローブを互いに対して移動させるステップとが続く請求項21に記載の方法。
【請求項1】
検体を有する表面アレイから試料採取する試料採取システムであって、
試料採取プローブの先端と前記表面アレイとの間に最適な液体のマイクロジャンクションが現れるように、前記表面アレイから所望の間隔を置いた距離に配置されて、分析のために前記表面アレイから試料採取するようにされた、先端を有する試料採取プローブと、
前記試料採取プローブと前記表面アレイを互いに向かって、また互いから離れるように移動させる手段と、
前記プローブの前記先端と前記表面アレイの両方の画像を取り込み、前記取り込まれた画像に対応する信号を生成する手段と、
前記取り込まれた画像に対応する前記信号を受け取り、前記取り込まれた画像から前記プローブの前記先端と前記表面アレイの間の実際の距離を決定する手段と、
前記プローブの前記先端と前記表面アレイの間の実際の距離を所望の目標の距離と比較し、前記プローブの前記先端と前記表面アレイの間の実際の距離と、所望の距離との間の違いが所定の範囲外にある場合に、前記表面アレイと前記プローブ先端を互いに向かって、また互いから離れるように移動させることによって、実際の目標の距離が所望の距離に接近するように、互いに向かって、また互いから離れるように前記表面アレイと前記プローブ先端の移動を開始させる比較手段とを備える試料採取システム。
【請求項2】
前記プローブによって試料採取される前記表面アレイが、実質的にX−Y平面内に配置され、Z座標軸に沿って前記プローブから間隔を置いて配置され、前記表面アレイに沿ったいくつかの座標位置のうちの全てが試料採取の目的で前記プローブの前記先端と位置合わせすることができるように、前記表面アレイと前記プローブを互いに向かって、また互いから離れるように前記表面アレイと前記プローブを移動させる前記手段が、前記表面アレイを前記X−Y平面内で前記プローブに対して移動させる手段をさらに備える請求項1に記載のシステム。
【請求項3】
前記プローブ先端の影が前記表面アレイ上に落とされ、前記画像を取り込む手段の表面によって取り込まれた前記画像が前記プローブ先端と前記プローブ先端の前記影の両方を含むように、画像を取り込むための前記手段が光ビームを前記プローブ先端に向けて送る手段を備える請求項1に記載のシステム。
【請求項4】
前記プローブの前記先端と前記表面アレイの間の実際の距離を決定する前記手段が、前記プローブ先端の画像が取り込まれた位置と前記プローブ先端の前記影のうちの少なくとも1つを利用する請求項3に記載のシステム。
【請求項5】
決定するための前記手段が、前記プローブの先端と前記表面アレイの間の実際の距離を決定するためにカメラが取り込んだ画像にライン平均輝度(LAB)技術を利用するようにされた請求項4に記載のシステム。
【請求項6】
分析のために表面アレイから試料採取する表面試料採取システムであって、前記システムが先端を有する試料採取プローブを備え、前記表面アレイがそのアレイによって試料採取され、前記プローブの前記先端と、試料採取の目的で前記プローブ先端と前記表面アレイの間に最適な液体のマイクロジャンクションが現れる前記表面アレイとの間の所望の目標の距離が存在する表面試料採取システムにおいて、
試料採取の目的で、前記最適な液体のマイクロジャンクションが前記プローブ先端と前記表面アレイの間に現れる、前記プローブの前記先端と前記表面アレイの間の所望の目標の距離に関連する情報を含むコンピュータと、
前記コンピュータから受け取ったコマンドに応答して、前記表面アレイと前記プローブの前記先端を、互いに向かって、また互いから離れるように移動させるために、前記コンピュータに接続された手段と、
前記プローブの前記先端と前記表面アレイの両方の画像を取り込み、前記取り込まれた画像に対応する信号を前記コンピュータに送る手段と、
前記コンピュータが、前記取り込まれた画像に対応する前記信号を受け取り、前記取り込まれた画像から前記プローブの前記先端と前記表面アレイの間の実際の距離を決定する手段を備え、
前記コンピュータが、前記プローブの前記先端と前記表面アレイの間の実際の距離を目標の距離と比較し、前記プローブの前記先端と前記表面アレイの間の実際の距離が所定の範囲外にある場合に、実際の距離が目標の距離に接近するように、互いに向かって、また互いから離れるように前記表面アレイと前記プローブ先端の移動を開始させる比較手段をさらに備える表面試料採取システム。
【請求項7】
前記表面アレイが、実質的にX−Y平面内に配置され、Z座標軸に沿って前記プローブから間隔を置いて配置され、前記表面アレイと前記プローブを互いに向かって、また互いから離れるように移動させる前記手段が、前記表面アレイに沿ったいくつかの座標位置のうちの全てが試料採取の目的で前記プローブの前記先端と位置合わせすることができるように、前記表面アレイを前記X−Y平面内で前記プローブに対して移動させる手段をさらに備える請求項6に記載のシステム。
【請求項8】
前記プローブ先端の影が前記表面アレイ上に落とされ、前記画像を取り込む手段の表面によって取り込まれた前記画像が前記プローブ先端と前記プローブ先端の前記影の両方を含むように、画像を取り込むための前記手段が、光ビームを前記プローブ先端に向けて送る手段を備える請求項6に記載のシステム。
【請求項9】
前記プローブの前記先端と前記表面アレイの間の実際の距離を決定する前記手段が、前記プローブ先端の画像が取り込まれた位置と前記プローブ先端の前記影のうちの少なくとも1つを利用する請求項8に記載のシステム。
【請求項10】
決定するための前記手段が、前記プローブの先端と前記表面アレイの間の実際の距離を決定するためにカメラが取り込んだ画像にライン平均輝度(LAB)技術を利用するようにされた請求項9に記載のシステム。
【請求項11】
検体を含む表面アレイから試料採取する方法であって、
試料採取プローブの先端と前記表面アレイとの間に最適な液体のマイクロジャンクションが現れるように、前記プローブの前記先端が前記表面アレイから所望の間隔を置いた目標の距離に配置されて、分析のために表面アレイから試料採取するようにされた、先端を有する試料採取プローブを用意するステップと、
前記試料採取プローブと前記表面アレイが互いに向かって、また互いから離れるように移動できるように、前記プローブと前記表面アレイを互いに対して支持するステップと、
前記プローブの前記先端と前記表面アレイの両方の画像を取り込むステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離を前記取り込まれた画像から決定するステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離を所望の目標の距離と比較し、前記プローブの前記先端と前記表面アレイの間の実際の距離と、所望の目標の距離との間の違いが所定の範囲外にある場合に、前記表面アレイと前記プローブ先端を互いに向かって、また互いから離れるように移動させることによって、実際の距離が所望の目標の距離に接近するように、互いに向かって、また互いから離れるように前記表面アレイと前記プローブ先端の移動を開始するステップとを含む方法。
【請求項12】
前記プローブ先端の影が前記表面アレイ上に落とされ、前記画像を取り込むステップの間に取り込まれた前記画像が前記プローブ先端と前記プローブ先端の前記影の両方を含むように、画像を取り込むための前記ステップが、光ビームを前記プローブ先端に向けて送るステップを含む請求項11に記載の方法。
【請求項13】
前記プローブの前記先端と前記表面アレイの間の実際の距離を決定する前記ステップが、前記プローブの画像が取り込まれた位置と前記プローブ先端の前記影のうちの少なくとも1つを利用する請求項12に記載の方法。
【請求項14】
決定する前記ステップが、前記プローブ先端と前記表面アレイの間の実際の距離を決定するためにカメラが取り込んだ画像にライン平均輝度(LAB)技術を適用するようにされた請求項12に記載の方法。
【請求項15】
分析のために表面アレイから試料採取する方法であって、前記方法が先端を有する試料採取プローブの使用を伴い、それによって前記表面アレイが試料採取され、前記プローブの前記先端と、試料採取の目的で前記プローブ先端と前記表面アレイの間に最適な液体のマイクロジャンクションが現れる前記表面アレイとの間の所望の間隔を置いた目標の距離が存在する表面試料採取方法において、
前記プローブの前記先端と前記表面アレイの両方の画像を取り込むステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離を前記取り込まれた画像から決定するステップと、
試料採取の目的で、前記プローブの前記先端と前記表面アレイとの間の実際の距離と、前記最適な液体のマイクロジャンクションが前記プローブ先端と前記表面アレイの間に現れる、前記所望の目標の距離とを比較するステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離と、所望の目標の距離が所定の範囲外にある場合に、実際の距離が目標の距離に接近するように、前記表面アレイと前記プローブ先端を互いに向かって、また互いから離れるように移動させるステップとを含む方法。
【請求項16】
取り込み、決定し、比較し、移動させる前記ステップが、前記プローブ先端と前記表面アレイの間の実際の距離が前記目標の距離の所定の範囲内になるまで、必要に応じて繰り返される請求項15に記載の方法。
【請求項17】
前記表面アレイの別の位置が前記プローブ先端と位置合わせされ、前記試料採取プロセス中に、前記プローブ先端と前記表面アレイの間の実際の距離が目標の距離の所定の範囲内に維持されるように、取り込み、決定し、比較し、移動させる前記ステップが、前記表面アレイと前記プローブ先端を互いに対して移動させることを伴う試料採取プロセス中に実施される請求項15に記載の方法。
【請求項18】
前記プローブ先端の影が前記表面アレイ上に落とされ、画像を取り込むステップの間に取り込まれた前記画像が前記プローブ先端と前記プローブ先端の前記影の両方を含むように、画像を取り込むための前記ステップが光ビームを前記プローブ先端に向けて送るステップを含む請求項15に記載の方法。
【請求項19】
決定する前記ステップが、前記プローブの画像が取り込まれた位置と前記プローブ先端の前記影のうちの少なくとも1つを利用する請求項15に記載の方法。
【請求項20】
決定するための前記手段が、前記プローブの先端と前記表面アレイの間の実際の距離を決定するために、カメラが取り込んだ画像にライン平均輝度(LAB)技術を適用する請求項19に記載の方法。
【請求項21】
検体を含む表面アレイから試料採取する方法であって、前記方法が、
前記試料採取プローブの前記先端と前記表面アレイとの間に最適な液体のマイクロジャンクションが現れるように、前記プローブの前記先端が前記表面アレイから所望の間隔を置いた目標の距離に配置されて、分析のために表面アレイから試料採取するようにされた、先端を有する試料採取プローブを用意するステップと、
前記試料採取プローブと前記表面アレイが互いに向かって、また互いから離れるように移動できるように、前記プローブと前記表面アレイを互いに対して支持するステップと、
前記プローブの前記先端と前記表面アレイの両方の画像を取り込むステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離を前記取り込まれた画像から決定するステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離が所望の目標の距離よりもわずかに小さい1つの状態に前記表面アレイと前記プローブの前記先端を互いに対して移動させるステップと、
前記プローブ先端と前記表面アレイを互いに対して静止した関係に所定の時間の間、前記1つの状態に維持するステップと、
前記表面アレイと前記プローブ先端を互いから移動させるステップと、
前記プローブの前記先端と前記表面アレイの間の実際の距離を所望の目標の距離と比較するステップと、
前記表面アレイと前記プローブ先端の間の実際の距離が、目標の距離が所定の範囲内にある場合に、前記表面アレイと前記プローブ先端が互いから離れるように移動させるのを停止させるステップとを含む方法。
【請求項22】
前記表面アレイと前記プローブ先端の間の実際の距離が目標の距離の所定の範囲内になるように前記表面アレイと前記プローブ先端を移動させるステップの後に、
試料採取の目的で前記表面アレイの別の位置を前記プローブ先端と位置合わせするために前記表面アレイと前記プローブを互いに対して移動させるステップと、
前記プローブの前記先端と前記表面アレイの追加の画像を取り込むために取込みの前記ステップが繰り返されるとき、前記表面アレイと前記プローブ先端を所定の目標の距離の範囲内に維持するステップであって、前記追加の画像のそれぞれに関する前記表面アレイと前記プローブ先端の間の実際の距離を決定するため、前記追加の画像に決定する前記ステップが実施され、前記追加の画像のそれぞれに関して決定された実際の距離を目標の距離と比較するために比較する前記ステップが繰り返されるステップと、
実際の距離が前記比較するステップの間に目標の距離の所定の範囲外になるように常に決定される場合に、前記表面アレイと前記プローブ先端の間の実際の距離を目標の距離に近づけるために、前記表面アレイとプローブを互いに対して移動させるステップとが続く請求項21に記載の方法。
【図1】

【図2】
【図3】
【図4a】
【図4b】
【図4c】
【図4d】
【図5a】
【図5b】
【図6a】
【図6b】
【図6c】
【図6d】
【図2】
【図3】
【図4a】
【図4b】
【図4c】
【図4d】
【図5a】
【図5b】
【図6a】
【図6b】
【図6c】
【図6d】
【公表番号】特表2008−542752(P2008−542752A)
【公表日】平成20年11月27日(2008.11.27)
【国際特許分類】
【出願番号】特願2008−514633(P2008−514633)
【出願日】平成18年4月18日(2006.4.18)
【国際出願番号】PCT/US2006/014383
【国際公開番号】WO2006/132708
【国際公開日】平成18年12月14日(2006.12.14)
【出願人】(301006404)ユーティバトル・エルエルシイ (5)
【Fターム(参考)】
【公表日】平成20年11月27日(2008.11.27)
【国際特許分類】
【出願日】平成18年4月18日(2006.4.18)
【国際出願番号】PCT/US2006/014383
【国際公開番号】WO2006/132708
【国際公開日】平成18年12月14日(2006.12.14)
【出願人】(301006404)ユーティバトル・エルエルシイ (5)
【Fターム(参考)】
[ Back to top ]