
液体供給装置および生体組織処理装置
【課題】チューブが液体容器に接続されないまま送液動作が行われることを簡易に防止し、チューブ内の液体の清浄度を維持する。
【解決手段】液体Bを貯留する液体容器6と、該液体容器6の下部に設けられた接続部6aに貫通させるスパイクニードル10と、該スパイクニードル10を先端に取り付けたチューブ7と、該チューブ7内に流入した液体Bに送りをかけるポンプ8と、チューブ7内への液体Bの流入を検出する液体検出手段9と、該液体検出手段9により液体Bの流入が検出された場合にポンプ8を駆動する制御部5とを備える液体供給装置1を提供する。
【解決手段】液体Bを貯留する液体容器6と、該液体容器6の下部に設けられた接続部6aに貫通させるスパイクニードル10と、該スパイクニードル10を先端に取り付けたチューブ7と、該チューブ7内に流入した液体Bに送りをかけるポンプ8と、チューブ7内への液体Bの流入を検出する液体検出手段9と、該液体検出手段9により液体Bの流入が検出された場合にポンプ8を駆動する制御部5とを備える液体供給装置1を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液体供給装置および生体組織処理装置に関するものである。
【背景技術】
【0002】
従来、処理容器内に収容された脂肪組織を洗浄液とともに攪拌することにより脂肪組織を洗浄する脂肪組織処理装置が知られている(例えば、特許文献1参照。)。
この脂肪組織処理装置では、洗浄された脂肪組織に対して、消化酵素液を添加して攪拌することにより、脂肪組織を分解して脂肪由来細胞を単離させるようになっている。
【0003】
洗浄液や消化酵素液等の液体の供給の際には、液体を収容した液体容器の下部に設けられた接続部に、チューブ先端に取り付けたスパイクニードルを貫通させて、チューブ内に液体を流入させ、ベリスタポンプのようなポンプの駆動によって処理容器に送液することが行われる。
【0004】
【特許文献1】国際公開第05/012480号パンフレット
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、何らかの原因によって、スパイクニードルが接続部に貫通されないままの状態でベリスタポンプが駆動されてしまうと、スパイクニードルの先端開口からチューブ内に外気が流入してしまうという不都合がある。チューブおよびチューブ内の空気は滅菌処理することで清浄な状態を維持することができるが、チューブ内に流入する外気の清浄度管理は大がかりとなる。
【0006】
本発明は上述した事情に鑑みてなされたものであって、チューブが液体容器に接続されないまま送液動作が行われることを簡易に防止し、チューブ内の液体の清浄度を維持することができる液体供給装置および生体組織処理装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は以下の手段を提供する。
本発明は、液体を貯留する液体容器と、該液体容器の下部に設けられた接続部に貫通させるスパイクニードルと、該スパイクニードルを先端に取り付けたチューブと、該チューブ内に流入した液体に送りをかけるポンプと、前記チューブ内への液体の流入を検出する液体検出手段と、該液体検出手段により液体の流入が検出された場合にポンプを駆動する制御部とを備える液体供給装置を提供する。
【0008】
本発明によれば、チューブの先端に取り付けたスパイクニードルを液体容器の下部に儲けられた接続部に貫通させると、液体容器内の液体がスパイクニードルを介してチューブ内に流入し、液体検出部により検出される。そして、制御部が、液体検出部により液体の流入が検出された場合にポンプを駆動してチューブ内の液体を送る。したがって、スパイクニードルが接続部に貫通されていない状態、すなわち、スパイクニードルの先端開口が外気に開放されている状態でポンプが駆動されて、先端開口から外気がチューブ内に取り込まれてしまう不都合の発生を未然に防止することができる。
【0009】
上記発明においては、前記液体検出手段が、前記液体容器内の液体の液面より高い位置において前記チューブの途中位置に設けられ前記チューブ内の空気を外部に排出する開放口と、該開放口を開閉可能な切替弁と、前記液面より低い位置に配置され前記チューブ内の液体を検出するセンサとを備え、前記制御部が、前記切替弁を開放した状態で前記センサにより液体が検出された場合に、前記切替弁を閉止した後に前記ポンプを駆動することとしてもよい。
【0010】
このようにすることで、切替弁を開放した状態で、スパイクニードルを液体容器の接続部に貫通させると、液体容器内の液体がスパイクニードルを介してチューブ内に流入する。チューブ内に存在していた空気は、流入した液体によって押されて、開放口から排出されるので、液体はチューブ内にスムーズに流入する。開放口は液体容器内の液体の液面より高い位置に配置されているので、チューブ内に流入した液体は開放口から排出されることなく、その下方に液面を形成する。
【0011】
これにより、液面の下方に配置されているセンサがチューブ内の液体を確実に検出することができる。そして、制御部が切替弁を閉止した後にポンプを駆動することにより、チューブ内に流入した液体を開放口から放出することなくチューブに沿って供給することができる。
【0012】
また、上記発明においては、前記制御部が、前記センサによる液体の検出の有無を報知する報知部を備えていてもよい。
このようにすることで、報知部により報知された結果を受けた作業者が、スパイクニードルを接続部に貫通させることができ、液体が供給されないまま放置される不都合の発生を防止することができる。
【0013】
また、上記発明においては、前記スパイクニードルを駆動して前記接続部に貫通させるスパイク機構を備え、前記制御部が、前記スパイク機構によるスパイク動作後所定の時間内に、前記センサにより液体が検出されない場合に、前記報知部によりスパイクエラーを報知することとしてもよい。
このようにすることで、スパイク機構の作動により、スパイクニードルが駆動されて接続部に貫通させるスパイク動作が行われた結果、スパイクエラーが発生した場合には、センサにより液体が検出されないので、報知部によりこれを迅速に作業者に知らせ、復旧作業を促すことができる。
【0014】
また、本発明は、生体組織を収容する処理容器と、該処理容器内に処理液を供給する上記いずれかの液体供給装置とを備える生体組織処理装置を提供する。
本発明によれば、チューブ内に外気が取り込まれないので、処理容器内に外気を含む液体が供給される不都合の発生を未然に防止し、清浄な状態で生体組織を処理することができる。
【発明の効果】
【0015】
本発明によれば、チューブが液体容器に接続されないまま送液動作が行われることを簡易に防止し、チューブ内の液体の清浄度を維持することができるという効果を奏する。
【発明を実施するための最良の形態】
【0016】
本発明の一実施形態に係る液体供給装置1および生体組織処理装置2について、図1および図2を参照して以下に説明する。
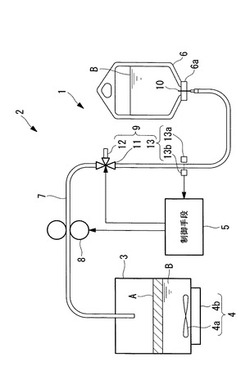
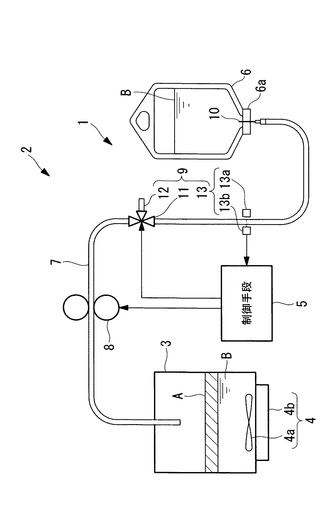
本実施形態に係る生体組織処理装置2は、生体組織、例えば、脂肪組織Aを洗浄(し、あるいは、消化酵素液によって分解)する処理装置であって、図1に示されるように、脂肪組織Aを収容する処理容器3と、該処理容器3内に洗浄液(液体)Bを供給する液体供給装置1と、処理容器3内に収容された脂肪組織Aと洗浄液Bとを攪拌することで脂肪組織Aを洗浄する攪拌手段4と、これらを制御する制御手段5とを備えている。
【0017】
本実施形態に係る液体供給装置1は、洗浄液Bを貯留する洗浄液容器6と、該洗浄液容器6と処理容器3とを接続するチューブ7と、該チューブ7の途中位置に配置されたベリスタポンプのようなポンプ8と、チューブ7内の洗浄液Bを検出する液体検出手段9とを備えている。
洗浄液容器6には、その下部に、スパイクニードル10を貫通させる接続部6aが設けられている。
【0018】
チューブ7は、例えば、ディスポーザブルのものであって、透明または半透明であり、先端にスパイクニードル10が取り付けられている。チューブ7は、スパイクニードル10側から一旦下降し、その後湾曲して洗浄液容器6よりも高い位置まで上昇する経路を辿った後に処理容器3へ導かれるように配置されている。
【0019】
また、チューブ7の長さ方向の途中位置には、例えば、3方弁のような切替弁11が設けられている。切替弁11は、洗浄液容器6内の洗浄液Bの液面より高い位置に配置されており、制御手段5によって、スパイクニードル10から処理容器3へと続く流路と、スパイクニードル10から大気開放された開放口12へと続く流路とを切り替えられるようになっている。
【0020】
液体検出手段9は、上述した開放口12および切替弁11と、チューブ7を半径方向に挟んで配置された発光部13aおよび受光部13bからなる透過式のセンサ13とを備えている。センサ13は、チューブ7内に流入した洗浄液Bが発光部13aと受光部13bとの間を通過することで、受光部13bにより受光される光量が低下することを利用して、チューブ7内への洗浄液Bの流入を検出するようになっている。
【0021】
また、センサ13は、洗浄液容器6内の洗浄液Bの液面より低い位置に配置されている。具体的には、センサ13は、洗浄液容器6内の洗浄液Bの液面がどの位置にあってもそれよりも低い位置となるように、接続部6aとほぼ同じ高さに配置されている。
【0022】
攪拌手段4は、任意の方法のものでよいが、図1に示す例では、処理容器3内の底面に配置される磁性材料からなる攪拌羽根4aと、該攪拌羽根4aを処理容器3内で回転させ、処理容器3内に旋回流を発生させるマグネット4bとを備えるマグネットスターラが採用されている。
【0023】
制御手段5は、センサ13により洗浄液Bが検出されていない状態では、切替弁11を開放口12側に切り替えており、センサ13により洗浄液Bが検出された時点で、開放口12を閉止して処理容器3側に切替弁11を切り替え、その後、ポンプ8を駆動するようになっている。
【0024】
このように構成された本実施形態に係る液体供給装置1および生体組織処理装置2の作用について以下に説明する。
本実施形態に係る脂肪組織洗浄装置2を用いて脂肪組織Aを洗浄するには、図1に示されるように、まず、処理容器3内に脂肪組織Aを収容した状態で、液体供給装置1を作動させて、洗浄液容器6内の洗浄液Bを処理容器3内に供給する。そして、攪拌手段4を作動させて、処理容器3内において洗浄液Bと脂肪組織Aとの混合液を攪拌する。これにより、脂肪組織Aに付着している血液や塵埃等を洗浄することができる。
【0025】
この場合において、洗浄液容器6から処理容器3への洗浄液Bの供給は、ディスポーザブルのチューブ7により洗浄液容器6と処理容器3とを接続することにより行われる。具体的には、チューブ7の一端を処理容器3内に挿入し、他端に設けられたスパイクニードル10を洗浄液容器6の下部に備えられている接続部6aに貫通させる。
【0026】
スパイクニードル10を接続部6aに貫通させる際には、センサ13がチューブ7内の洗浄液Bを検出していないので、制御手段5が、ポンプ8を停止した状態に保持し、切替弁11を開放口12側に切り替えている。この状態で、スパイクニードル10を接続部6aに貫通させると、水頭差によって洗浄液容器6内の洗浄液Bが、スパイクニードル10を介してチューブ7内に流入する。
【0027】
この場合において、切替弁11が開放口12側に切り替えられていて、チューブ7内の空間が大気開放されているので、チューブ7内に流れ込む洗浄液Bによって押されたチューブ7内の空気は、切替弁11を介して開放口12から外部に放出される。したがって、洗浄液Bは内部の空気によって阻害されることなくスムーズにチューブ7内に流入する。
【0028】
切替弁11は、洗浄液容器6内の洗浄液Bの液面より高い位置に配置されているので、洗浄液容器6内からチューブ7に流入した洗浄液Bは、開放口12から外部に流れ出すことがなく、切替弁11の下方のチューブ7内において、洗浄液容器6内の洗浄液Bの液面と同じ高さに液面を形成して停止する。
このとき、センサ13が洗浄液容器6内の洗浄液Bの液面より低い位置に配置されているので、チューブ7内に流入した洗浄液Bがセンサ13によって検出される。
【0029】
一方、何らかの原因によって、スパイクニードル10が洗浄液容器6の接続部6aに貫通されていない場合、洗浄液Bがチューブ7内に流入しないので、センサ13には洗浄液Bが検出されない。
制御手段5は、センサ13により洗浄液Bが検出されない場合には、ポンプ8を駆動しないので、スパイクニードル10が洗浄液容器6に接続されないままで送りがかけられることがない。その結果、開放されたスパイクニードル10の先端開口から外気がチューブ7内に取り込まれてしまう不都合の発生を未然に防止することができる。
【0030】
また、制御手段5は、センサ13により洗浄液Bが検出された場合には、切替弁11を作動させて開放口12を閉止した後にポンプ8を作動させて、チューブ7内の洗浄液Bに送りをかける。これにより、洗浄液容器6内の洗浄液Bが処理容器3へと供給されることになる。
【0031】
このように、本実施形態に係る液体供給装置1および生体組織処理装置2によれば、チューブ7内に洗浄液Bが流入したことを検知することでスパイクニードル10が接続部6aに貫通させられたことを確認するので、スパイクニードル10が洗浄液容器6に接続されないまま送りがかけられることが防止され、処理容器3内に、細菌や塵埃を含む外気が取り込まれることを防止して処理容器3内の清浄度を維持することができる。
【0032】
なお、本実施形態に係る液体供給装置1においては、脂肪組織Aを洗浄する洗浄液Bを供給する場合について説明したが、これに代えて、消化酵素液を供給する場合に適用してもよい。また、他の液体を供給する場合に適用してもよい。
【0033】
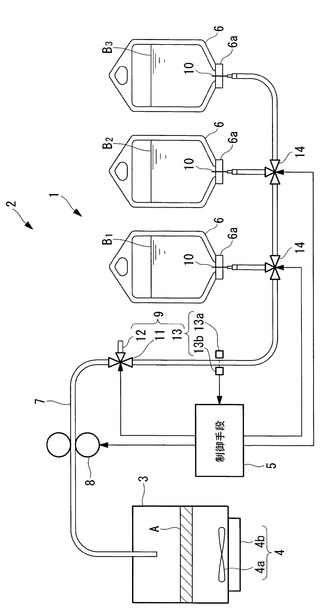
また、図2に示されるように、液体B1〜B3を収容した複数の液体容器6を切替弁14で接続した生体組織処理装置2においても、制御手段5が各切替弁14を切り替えて処理容器3に送る液体B1〜B3を供給する液体容器6を切り替える際に、上記と同様にして各液体容器6へのスパイクニードル10の接続を判断することとしてもよい。この場合においても、制御手段5が切替弁14を切り替える毎に、上記方法でスパイクニードル10の接続を判断することにより、処理容器3への外気の取り込みを防止して清浄な状態で生体組織Aを処理することができる。
【0034】
また、スパイクニードル10を自動的かつ無菌的に接続部に接続するスパイク機構(図示略)を有していてもよい。この場合には、制御部がスパイク機構を作動させて、スパイクニードル10を接続部6aに貫通させるスパイク動作を行わせ、そのスパイク動作後の所定時間内にセンサ13に液体B,B1〜B3が検出されない場合にスパイクエラーの発生を報知する報知部(図示略)を備えることが好ましい。
【図面の簡単な説明】
【0035】
【図1】本発明の一実施形態に係る生体組織洗浄装置を示す全体構成図である。
【図2】図1の生体組織洗浄装置の変形例を示す全体構成図である。
【符号の説明】
【0036】
A 脂肪組織(生体組織)
B 洗浄液(液体)
B1〜B3 液体
1 液体供給装置
2 生体組織処理装置
3 処理容器
5 制御手段(制御部)
6 洗浄液容器(液体容器)
6a 接続部
7 チューブ
8 ポンプ
9 液体検出手段
10 スパイクニードル
11 切替弁
12 開放口
13 センサ
【技術分野】
【0001】
本発明は、液体供給装置および生体組織処理装置に関するものである。
【背景技術】
【0002】
従来、処理容器内に収容された脂肪組織を洗浄液とともに攪拌することにより脂肪組織を洗浄する脂肪組織処理装置が知られている(例えば、特許文献1参照。)。
この脂肪組織処理装置では、洗浄された脂肪組織に対して、消化酵素液を添加して攪拌することにより、脂肪組織を分解して脂肪由来細胞を単離させるようになっている。
【0003】
洗浄液や消化酵素液等の液体の供給の際には、液体を収容した液体容器の下部に設けられた接続部に、チューブ先端に取り付けたスパイクニードルを貫通させて、チューブ内に液体を流入させ、ベリスタポンプのようなポンプの駆動によって処理容器に送液することが行われる。
【0004】
【特許文献1】国際公開第05/012480号パンフレット
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、何らかの原因によって、スパイクニードルが接続部に貫通されないままの状態でベリスタポンプが駆動されてしまうと、スパイクニードルの先端開口からチューブ内に外気が流入してしまうという不都合がある。チューブおよびチューブ内の空気は滅菌処理することで清浄な状態を維持することができるが、チューブ内に流入する外気の清浄度管理は大がかりとなる。
【0006】
本発明は上述した事情に鑑みてなされたものであって、チューブが液体容器に接続されないまま送液動作が行われることを簡易に防止し、チューブ内の液体の清浄度を維持することができる液体供給装置および生体組織処理装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は以下の手段を提供する。
本発明は、液体を貯留する液体容器と、該液体容器の下部に設けられた接続部に貫通させるスパイクニードルと、該スパイクニードルを先端に取り付けたチューブと、該チューブ内に流入した液体に送りをかけるポンプと、前記チューブ内への液体の流入を検出する液体検出手段と、該液体検出手段により液体の流入が検出された場合にポンプを駆動する制御部とを備える液体供給装置を提供する。
【0008】
本発明によれば、チューブの先端に取り付けたスパイクニードルを液体容器の下部に儲けられた接続部に貫通させると、液体容器内の液体がスパイクニードルを介してチューブ内に流入し、液体検出部により検出される。そして、制御部が、液体検出部により液体の流入が検出された場合にポンプを駆動してチューブ内の液体を送る。したがって、スパイクニードルが接続部に貫通されていない状態、すなわち、スパイクニードルの先端開口が外気に開放されている状態でポンプが駆動されて、先端開口から外気がチューブ内に取り込まれてしまう不都合の発生を未然に防止することができる。
【0009】
上記発明においては、前記液体検出手段が、前記液体容器内の液体の液面より高い位置において前記チューブの途中位置に設けられ前記チューブ内の空気を外部に排出する開放口と、該開放口を開閉可能な切替弁と、前記液面より低い位置に配置され前記チューブ内の液体を検出するセンサとを備え、前記制御部が、前記切替弁を開放した状態で前記センサにより液体が検出された場合に、前記切替弁を閉止した後に前記ポンプを駆動することとしてもよい。
【0010】
このようにすることで、切替弁を開放した状態で、スパイクニードルを液体容器の接続部に貫通させると、液体容器内の液体がスパイクニードルを介してチューブ内に流入する。チューブ内に存在していた空気は、流入した液体によって押されて、開放口から排出されるので、液体はチューブ内にスムーズに流入する。開放口は液体容器内の液体の液面より高い位置に配置されているので、チューブ内に流入した液体は開放口から排出されることなく、その下方に液面を形成する。
【0011】
これにより、液面の下方に配置されているセンサがチューブ内の液体を確実に検出することができる。そして、制御部が切替弁を閉止した後にポンプを駆動することにより、チューブ内に流入した液体を開放口から放出することなくチューブに沿って供給することができる。
【0012】
また、上記発明においては、前記制御部が、前記センサによる液体の検出の有無を報知する報知部を備えていてもよい。
このようにすることで、報知部により報知された結果を受けた作業者が、スパイクニードルを接続部に貫通させることができ、液体が供給されないまま放置される不都合の発生を防止することができる。
【0013】
また、上記発明においては、前記スパイクニードルを駆動して前記接続部に貫通させるスパイク機構を備え、前記制御部が、前記スパイク機構によるスパイク動作後所定の時間内に、前記センサにより液体が検出されない場合に、前記報知部によりスパイクエラーを報知することとしてもよい。
このようにすることで、スパイク機構の作動により、スパイクニードルが駆動されて接続部に貫通させるスパイク動作が行われた結果、スパイクエラーが発生した場合には、センサにより液体が検出されないので、報知部によりこれを迅速に作業者に知らせ、復旧作業を促すことができる。
【0014】
また、本発明は、生体組織を収容する処理容器と、該処理容器内に処理液を供給する上記いずれかの液体供給装置とを備える生体組織処理装置を提供する。
本発明によれば、チューブ内に外気が取り込まれないので、処理容器内に外気を含む液体が供給される不都合の発生を未然に防止し、清浄な状態で生体組織を処理することができる。
【発明の効果】
【0015】
本発明によれば、チューブが液体容器に接続されないまま送液動作が行われることを簡易に防止し、チューブ内の液体の清浄度を維持することができるという効果を奏する。
【発明を実施するための最良の形態】
【0016】
本発明の一実施形態に係る液体供給装置1および生体組織処理装置2について、図1および図2を参照して以下に説明する。
本実施形態に係る生体組織処理装置2は、生体組織、例えば、脂肪組織Aを洗浄(し、あるいは、消化酵素液によって分解)する処理装置であって、図1に示されるように、脂肪組織Aを収容する処理容器3と、該処理容器3内に洗浄液(液体)Bを供給する液体供給装置1と、処理容器3内に収容された脂肪組織Aと洗浄液Bとを攪拌することで脂肪組織Aを洗浄する攪拌手段4と、これらを制御する制御手段5とを備えている。
【0017】
本実施形態に係る液体供給装置1は、洗浄液Bを貯留する洗浄液容器6と、該洗浄液容器6と処理容器3とを接続するチューブ7と、該チューブ7の途中位置に配置されたベリスタポンプのようなポンプ8と、チューブ7内の洗浄液Bを検出する液体検出手段9とを備えている。
洗浄液容器6には、その下部に、スパイクニードル10を貫通させる接続部6aが設けられている。
【0018】
チューブ7は、例えば、ディスポーザブルのものであって、透明または半透明であり、先端にスパイクニードル10が取り付けられている。チューブ7は、スパイクニードル10側から一旦下降し、その後湾曲して洗浄液容器6よりも高い位置まで上昇する経路を辿った後に処理容器3へ導かれるように配置されている。
【0019】
また、チューブ7の長さ方向の途中位置には、例えば、3方弁のような切替弁11が設けられている。切替弁11は、洗浄液容器6内の洗浄液Bの液面より高い位置に配置されており、制御手段5によって、スパイクニードル10から処理容器3へと続く流路と、スパイクニードル10から大気開放された開放口12へと続く流路とを切り替えられるようになっている。
【0020】
液体検出手段9は、上述した開放口12および切替弁11と、チューブ7を半径方向に挟んで配置された発光部13aおよび受光部13bからなる透過式のセンサ13とを備えている。センサ13は、チューブ7内に流入した洗浄液Bが発光部13aと受光部13bとの間を通過することで、受光部13bにより受光される光量が低下することを利用して、チューブ7内への洗浄液Bの流入を検出するようになっている。
【0021】
また、センサ13は、洗浄液容器6内の洗浄液Bの液面より低い位置に配置されている。具体的には、センサ13は、洗浄液容器6内の洗浄液Bの液面がどの位置にあってもそれよりも低い位置となるように、接続部6aとほぼ同じ高さに配置されている。
【0022】
攪拌手段4は、任意の方法のものでよいが、図1に示す例では、処理容器3内の底面に配置される磁性材料からなる攪拌羽根4aと、該攪拌羽根4aを処理容器3内で回転させ、処理容器3内に旋回流を発生させるマグネット4bとを備えるマグネットスターラが採用されている。
【0023】
制御手段5は、センサ13により洗浄液Bが検出されていない状態では、切替弁11を開放口12側に切り替えており、センサ13により洗浄液Bが検出された時点で、開放口12を閉止して処理容器3側に切替弁11を切り替え、その後、ポンプ8を駆動するようになっている。
【0024】
このように構成された本実施形態に係る液体供給装置1および生体組織処理装置2の作用について以下に説明する。
本実施形態に係る脂肪組織洗浄装置2を用いて脂肪組織Aを洗浄するには、図1に示されるように、まず、処理容器3内に脂肪組織Aを収容した状態で、液体供給装置1を作動させて、洗浄液容器6内の洗浄液Bを処理容器3内に供給する。そして、攪拌手段4を作動させて、処理容器3内において洗浄液Bと脂肪組織Aとの混合液を攪拌する。これにより、脂肪組織Aに付着している血液や塵埃等を洗浄することができる。
【0025】
この場合において、洗浄液容器6から処理容器3への洗浄液Bの供給は、ディスポーザブルのチューブ7により洗浄液容器6と処理容器3とを接続することにより行われる。具体的には、チューブ7の一端を処理容器3内に挿入し、他端に設けられたスパイクニードル10を洗浄液容器6の下部に備えられている接続部6aに貫通させる。
【0026】
スパイクニードル10を接続部6aに貫通させる際には、センサ13がチューブ7内の洗浄液Bを検出していないので、制御手段5が、ポンプ8を停止した状態に保持し、切替弁11を開放口12側に切り替えている。この状態で、スパイクニードル10を接続部6aに貫通させると、水頭差によって洗浄液容器6内の洗浄液Bが、スパイクニードル10を介してチューブ7内に流入する。
【0027】
この場合において、切替弁11が開放口12側に切り替えられていて、チューブ7内の空間が大気開放されているので、チューブ7内に流れ込む洗浄液Bによって押されたチューブ7内の空気は、切替弁11を介して開放口12から外部に放出される。したがって、洗浄液Bは内部の空気によって阻害されることなくスムーズにチューブ7内に流入する。
【0028】
切替弁11は、洗浄液容器6内の洗浄液Bの液面より高い位置に配置されているので、洗浄液容器6内からチューブ7に流入した洗浄液Bは、開放口12から外部に流れ出すことがなく、切替弁11の下方のチューブ7内において、洗浄液容器6内の洗浄液Bの液面と同じ高さに液面を形成して停止する。
このとき、センサ13が洗浄液容器6内の洗浄液Bの液面より低い位置に配置されているので、チューブ7内に流入した洗浄液Bがセンサ13によって検出される。
【0029】
一方、何らかの原因によって、スパイクニードル10が洗浄液容器6の接続部6aに貫通されていない場合、洗浄液Bがチューブ7内に流入しないので、センサ13には洗浄液Bが検出されない。
制御手段5は、センサ13により洗浄液Bが検出されない場合には、ポンプ8を駆動しないので、スパイクニードル10が洗浄液容器6に接続されないままで送りがかけられることがない。その結果、開放されたスパイクニードル10の先端開口から外気がチューブ7内に取り込まれてしまう不都合の発生を未然に防止することができる。
【0030】
また、制御手段5は、センサ13により洗浄液Bが検出された場合には、切替弁11を作動させて開放口12を閉止した後にポンプ8を作動させて、チューブ7内の洗浄液Bに送りをかける。これにより、洗浄液容器6内の洗浄液Bが処理容器3へと供給されることになる。
【0031】
このように、本実施形態に係る液体供給装置1および生体組織処理装置2によれば、チューブ7内に洗浄液Bが流入したことを検知することでスパイクニードル10が接続部6aに貫通させられたことを確認するので、スパイクニードル10が洗浄液容器6に接続されないまま送りがかけられることが防止され、処理容器3内に、細菌や塵埃を含む外気が取り込まれることを防止して処理容器3内の清浄度を維持することができる。
【0032】
なお、本実施形態に係る液体供給装置1においては、脂肪組織Aを洗浄する洗浄液Bを供給する場合について説明したが、これに代えて、消化酵素液を供給する場合に適用してもよい。また、他の液体を供給する場合に適用してもよい。
【0033】
また、図2に示されるように、液体B1〜B3を収容した複数の液体容器6を切替弁14で接続した生体組織処理装置2においても、制御手段5が各切替弁14を切り替えて処理容器3に送る液体B1〜B3を供給する液体容器6を切り替える際に、上記と同様にして各液体容器6へのスパイクニードル10の接続を判断することとしてもよい。この場合においても、制御手段5が切替弁14を切り替える毎に、上記方法でスパイクニードル10の接続を判断することにより、処理容器3への外気の取り込みを防止して清浄な状態で生体組織Aを処理することができる。
【0034】
また、スパイクニードル10を自動的かつ無菌的に接続部に接続するスパイク機構(図示略)を有していてもよい。この場合には、制御部がスパイク機構を作動させて、スパイクニードル10を接続部6aに貫通させるスパイク動作を行わせ、そのスパイク動作後の所定時間内にセンサ13に液体B,B1〜B3が検出されない場合にスパイクエラーの発生を報知する報知部(図示略)を備えることが好ましい。
【図面の簡単な説明】
【0035】
【図1】本発明の一実施形態に係る生体組織洗浄装置を示す全体構成図である。
【図2】図1の生体組織洗浄装置の変形例を示す全体構成図である。
【符号の説明】
【0036】
A 脂肪組織(生体組織)
B 洗浄液(液体)
B1〜B3 液体
1 液体供給装置
2 生体組織処理装置
3 処理容器
5 制御手段(制御部)
6 洗浄液容器(液体容器)
6a 接続部
7 チューブ
8 ポンプ
9 液体検出手段
10 スパイクニードル
11 切替弁
12 開放口
13 センサ
【特許請求の範囲】
【請求項1】
液体を貯留する液体容器と、
該液体容器の下部に設けられた接続部に貫通させるスパイクニードルと、
該スパイクニードルを先端に取り付けたチューブと、
該チューブ内に流入した液体に送りをかけるポンプと、
前記チューブ内への液体の流入を検出する液体検出手段と、
該液体検出手段により液体の流入が検出された場合にポンプを駆動する制御部とを備える液体供給装置。
【請求項2】
前記液体検出手段が、前記液体容器内の液体の液面より高い位置において前記チューブの途中位置に設けられ前記チューブ内の空気を外部に排出する開放口と、該開放口を開閉可能な切替弁と、前記液面より低い位置に配置され前記チューブ内の液体を検出するセンサとを備え、
前記制御部が、前記切替弁を開放した状態で前記センサにより液体が検出された場合に、前記切替弁を閉止した後に前記ポンプを駆動する請求項1に記載の液体供給装置。
【請求項3】
前記制御部が、前記センサによる液体の検出の有無を報知する報知部を備える請求項2に記載の液体供給装置。
【請求項4】
前記スパイクニードルを駆動して前記接続部に貫通させるスパイク機構を備え、
前記制御部が、前記スパイク機構によるスパイク動作後所定の時間内に、前記センサにより液体が検出されない場合に、前記報知部によりスパイクエラーを報知する請求項3に記載の液体供給装置。
【請求項5】
生体組織を収容する処理容器と、
該処理容器内に処理液を供給する請求項1から請求項4のいずれかに記載の液体供給装置とを備える生体組織処理装置。
【請求項1】
液体を貯留する液体容器と、
該液体容器の下部に設けられた接続部に貫通させるスパイクニードルと、
該スパイクニードルを先端に取り付けたチューブと、
該チューブ内に流入した液体に送りをかけるポンプと、
前記チューブ内への液体の流入を検出する液体検出手段と、
該液体検出手段により液体の流入が検出された場合にポンプを駆動する制御部とを備える液体供給装置。
【請求項2】
前記液体検出手段が、前記液体容器内の液体の液面より高い位置において前記チューブの途中位置に設けられ前記チューブ内の空気を外部に排出する開放口と、該開放口を開閉可能な切替弁と、前記液面より低い位置に配置され前記チューブ内の液体を検出するセンサとを備え、
前記制御部が、前記切替弁を開放した状態で前記センサにより液体が検出された場合に、前記切替弁を閉止した後に前記ポンプを駆動する請求項1に記載の液体供給装置。
【請求項3】
前記制御部が、前記センサによる液体の検出の有無を報知する報知部を備える請求項2に記載の液体供給装置。
【請求項4】
前記スパイクニードルを駆動して前記接続部に貫通させるスパイク機構を備え、
前記制御部が、前記スパイク機構によるスパイク動作後所定の時間内に、前記センサにより液体が検出されない場合に、前記報知部によりスパイクエラーを報知する請求項3に記載の液体供給装置。
【請求項5】
生体組織を収容する処理容器と、
該処理容器内に処理液を供給する請求項1から請求項4のいずれかに記載の液体供給装置とを備える生体組織処理装置。
【図1】


【図2】
【図2】
【公開番号】特開2010−64782(P2010−64782A)
【公開日】平成22年3月25日(2010.3.25)
【国際特許分類】
【出願番号】特願2008−235631(P2008−235631)
【出願日】平成20年9月12日(2008.9.12)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成22年3月25日(2010.3.25)
【国際特許分類】
【出願日】平成20年9月12日(2008.9.12)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]