
液体充填装置および液体充填方法
【課題】 定量充填を確実なものとし、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することができ、可撓性チューブの耐久寿命を可及的に向上させるとともに、充填装置の配設や設定を簡単かつ確実に行うことができ、しかも、静音で駆動可能な液体充填装置および液体充填方法を提供する。
【解決手段】
液流路5の開閉操作を行う作動手段8と、液体の充填量を検出する充填量検出手段と、充填量検出手段の検出結果に基づいて作動手段8の駆動を制御する制御部14とを備える液体充填装置であって、作動手段8は、支持体に配設された駆動手段10と、駆動手段10の駆動により正逆回動可能とされた回転子12と、回転子12の回動により可撓性チューブ6を押圧し、液流路5の開閉量を調整可能とされた押さえ部材13を備え、制御部14により駆動手段10の駆動を制御し、回転子12の正逆方向への回動量を調整して、液流路5の開閉操作を行なう。
【解決手段】
液流路5の開閉操作を行う作動手段8と、液体の充填量を検出する充填量検出手段と、充填量検出手段の検出結果に基づいて作動手段8の駆動を制御する制御部14とを備える液体充填装置であって、作動手段8は、支持体に配設された駆動手段10と、駆動手段10の駆動により正逆回動可能とされた回転子12と、回転子12の回動により可撓性チューブ6を押圧し、液流路5の開閉量を調整可能とされた押さえ部材13を備え、制御部14により駆動手段10の駆動を制御し、回転子12の正逆方向への回動量を調整して、液流路5の開閉操作を行なう。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、スタンディングパウチ、アンプル、壜等の容器に液体を定量充填するための液体充填装置および液体充填方法に関するものである。
【背景技術】
【0002】
充填包装業界等においては、容器へ定量充填するために、その充填経路における充填ノズルの手前に充填バルブを設け、この充填バルブを作動させることにより、充填開始および停止あるいはその充填流量の調整等が行われている。
【0003】
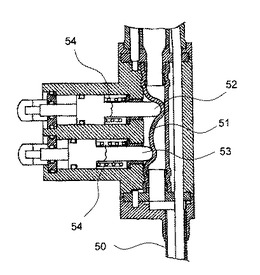
例えば、図22に示す充填装置においては、充填すべき液体を蓄えた不図示の液体タンクから充填ノズルまで液体を導く液通路50を設け、該液通路50の一定区間に可撓性チューブ51を設け、この可撓性チューブ51を押圧する進退移動可能な押圧部材52,53を上下に複数設けて充填バルブとし、充填時に前記押圧部材52,53により可撓性チューブ51の流量を制御すると共に、充填停止時に、下流側の押圧部材53を前進位置から後退位置へ移動させてサックバック現象を生じさせて液垂れを防止する液体充填を行っていた(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−52902号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、この押圧部材52,53の進退移動の反復作動が行われると、可撓性チューブ51に必要以上の疲労が生じて早期に劣化し、可撓性チューブ51の復元力が消失してしまい、潰れたままの状態となることで、時間当たりの充填流量が変わってしまう(少なくなる)ことがあった。
【0006】
さらには、複数個の充填ノズルを配設し、同時に供給される複数個の容器に対し一時に所定量の充填を行うように構成された充填装置(例えば、ロータリー式充填装置)の場合は、各充填ノズルに対して複数個づつ配設される押圧部材や押圧部材を作動させるエアアクチュエータにもそれぞれ個体差があり、動作時間や動作ストロークにばらつきがあるため、各充填ノズルの充填量を一定に揃えるように調整することが困難な作業となり、その調整にも経験やスキルを要するため、作業者が限られる等の様々な問題点を有していた。
【0007】
本発明は前記した問題点を解決するためになされたもので、液体の充填にあって、定量充填を確実なものとし、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することができ、可撓性チューブの耐久寿命を可及的に向上させるとともに、充填装置の配設や設定を簡単かつ確実に行うことができ、しかも、静音で駆動可能な液体充填装置と、同様に、液体の充填にあって、定量充填を確実なものとし、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することができる液体充填方法を提供することを目的としている。
【課題を解決するための手段】
【0008】
前記課題を解決する本発明の液体充填装置は、充填する液体を貯留するタンクと、容器に前記液体を注入する充填ノズルと、前記タンクと前記充填ノズルとの間に配設され、一定区間が可撓性チューブにより構成された液流路と、前記液流路の開閉操作を行う作動手段と、前記容器に対する液体の充填量を検出する充填量検出手段と、前記充填量検出手段の検出結果に基づいて前記作動手段の駆動を制御する制御部と、を備える液体充填装置であって、前記作動手段は、支持体に配設された駆動手段と、前記駆動手段の駆動により正逆回動可能とされた回転子と、前記回転子の回動により前記可撓性チューブを押圧し、前記液流路の開閉量を調整可能とされた押さえ部材を備え、前記制御部は、前記駆動手段の駆動を制御し、前記回転子の回動量を調整して前記液流路の開閉操作を行なうことを第1の特徴とする。
【0009】
また、本発明の液体充填装置は、容器に充填された液体中に充填ノズルの先端を位置させるノズル挿入機構を備え、前記回転子には、該回転子の回動により可撓性チューブを押圧して前記液流路を閉塞することが可能な一対の押さえ部材が配設されており、前記制御部は、前記充填量検出手段の検出結果により供給不足が検出された場合には、前記一対の押さえ部材のうち、前記充填ノズルから離れた位置において前記可撓性チューブに接離する一方の押さえ部材により、前記可撓性チューブを押圧して前記液流路の開閉量を調整し、前記容器に不足分の液体を追加充填するように前記駆動手段の駆動を制御し、前記充填量検出手段の検出結果により過充填が検出された場合には、前記一方の押さえ部材により液流路を閉塞した状態で、前記ノズル挿入機構を駆動させて前記容器に充填された液体中に充填ノズルの先端を位置させ、前記一対の押さえ部材のうちの前記充填ノズルに近い位置において前記可撓性チューブに接離する他方の押さえ部材で前記可撓性チューブを押圧して、前記一方の押さえ部材が閉塞している位置から充填ノズルまでの間の液流路内に前記容器から所定量の液体を負圧によって回収するように、前記駆動手段の駆動を制御することを第2の特徴とする。
【0010】
さらに、本発明の液体充填装置は、前記回転子には、可撓性チューブに対し、前記押さえ部材によって押圧されたときに拡幅となる方向から当接し、その断面形状を押圧される前の状態に復元させる復元部材が配設されており、前記制御部は、押さえ部材の可撓性チューブに対する押さえ部材の当接を解除するときに、押さえ部材と入れ変わりに復元部材が可撓性チューブに係合するように前記回転子を回動させるように前記駆動手段の駆動を制御することを第3の特徴とする。
【0011】
またさらに、本発明の液体充填装置は、充填ノズルの先端から露出する液滴の有無を検出可能なノズル先端液検知手段を備え、前記制御部は、前記充填ノズル先端液検知手段により充填ノズルの先端に液滴が検知されたときに、可撓性チューブを押圧して液流路を閉塞させている押さえ部材により引き続き可撓性チューブを押圧させて液流路を閉塞させつつ、可撓性チューブの押圧位置を液流路の上流側へ移動するように前記回転子を回動させるように前記駆動手段の駆動を制御することを第4の特徴とする。
【0012】
そして、本発明の液体充填方法は、充填する液体を貯留するタンクと充填ノズルとの間に配設された液流路の一定区間に該液流路を構成するように配設された可撓性チューブを押圧し、前記液流路内を流れる液体の流量を調整しつつ、定量充填を行なう液体充填方法であって、駆動手段の駆動を制御して回転子の正逆方向の回動量を調整し、前記回転子に設けられた押さえ部材の可撓性チューブに対する押圧状態を変化させることにより前記液流路内を流れる液体の流量を調整することを第1の特徴とする。
【0013】
また、液体充填後の前記押さえ部材が可撓性チューブを押圧してその液流路を閉塞している状態において、この閉塞状態を維持しつつ該押さえ部材の該可撓性チューブに押圧している位置を液流路の上流側へ移動させ、負圧を利用して過分な液体を該押さえ部材の該可撓性チューブに押圧している位置と前記充填ノズルとの間の液流路内に吸い上げることを第2の特徴とする。
【発明の効果】
【0014】
前述の第1の特徴を備えた液体充填装置によれば、駆動手段の駆動を制御して前記回転子の正逆方向の回動量を調整することにより、前記押さえ部材が前記可撓性チューブに非当接であり液流路を全開として大流量を得られる大容量充填状態と、前記押さえ部材が前記可撓性チューブを強く挟み込み、強く押圧して、液流路を全閉として閉塞する閉塞状態とを、前記押さえ部材が前記可撓性チューブを前記壁部材との間に挟み、押圧して、液流路を全開状態と全閉状態との間の任意の位置で半開として任意の流量を得られる小流量充填状態を介して相互に切換えることで、定量充填を実行することができる。
【0015】
このような液体充填装置は、駆動手段として、電動モータや直動式電動アクチュエータ等を用いることで実現でき、その場合には、前述の従来の充填装置のようなエアアクチュエータの配設が不必要となり、エアアクチュエータの切換(駆動)音よりも静音で充填作業を行うことができる。
【0016】
また、前記駆動手段の回動量は、充填する液体の粘性、充填量等を考慮して自動的に設定可能にプログラムミングしておくことで、該液体充填装置に設けられた操作入力手段等から必要な情報等を入力して設定することができ、作業者の経験やスキルに関わりなく、誰にでも簡単に調整することが可能となる。
【0017】
また、押さえ部材により可撓性チューブを押圧し、液流路を閉塞させた後、該押さえ部材を可撓性チューブに対する押圧方向へ更に回動させることにより、液流路内に負圧を発生させて、充填ノズル先端に残存する液滴を液流路内に吸い上げ、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することも可能となる。
【0018】
また、充填量検出手段により検出した充填量に基づき、前記駆動手段の駆動を制御して前記回転子の回動量を調整するフィードバック制御を実行することができ、定量充填を確実なものとすることができる。
【0019】
そして、第2の特徴を備えた液体充填装置によれば、充填量検出手段により検出した充填量に基づき、液体の微量な追加供給と回収とを行うフィードバック制御を実行することが可能となり、定量充填をさらに確実なものとすることができる。
【0020】
またさらに、第3の特徴を備えた液体充填装置によれば、充填後に前記復元部材を前記押さえ部材によって押し潰されたときに拡幅となる方向から前記可撓性チューブに当接させることで、可撓性チューブの潰れ形状の復元を補助することができ、可撓性チューブの耐久寿命を可及的に向上させるとともに、前記押さえ部材の非当接時における可撓性チューブの形状を常に所定の形状として保持することで定量充填をより確実なものとすることができる。
【0021】
そして、第4の特徴を備えた液体充填装置によれば、充填ノズル先端液検知手段により、充填ノズルの先端に液滴が検知されたときに、可撓性チューブを押圧し、液流路を閉塞させている押さえ部材を反充填ノズル方向へ更に回動させるように、前記駆動手段の駆動を制御し、液流路内に負圧を発生させて充填ノズル先端に残存する液滴を液流路内に吸い上げるようにすることで、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することができる。そして、このように液垂れを防止することにより、液垂れ時間を充填時間から省くことができるため、容器に対する液量充填の所要時間が短縮ができ、充填作業の効率を向上させることが可能となる。
【0022】
このように、本発明の液体充填装置によれば、液体の微量な追加充填、吸引によるフィードバック制御を可能とし、可撓性チューブの潰れ形状の復元部材を備えて定量充填を確実なものとし、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することができ、可撓性チューブの耐久寿命を可及的に向上させるとともに、充填装置の配設や設定を簡単かつ確実に行うことができる等の格別な効果を奏する。
【0023】
また、前述の第1の特徴を備えた液体充填方法によれば、駆動手段の駆動を制御して回転子の正逆方向の回動量を調整し、前記回転子に設けられた押さえ部材の可撓性チューブに対する押圧状態を変化させることにより前記液流路内を流れる液体の流量を調整することで、無段階に液体の流量を調整可能となり、液体の定量充填をより簡便かつ確実に実行することができる。また、駆動手段として、電動モータや直動式電動アクチュエータを用いれば、前述の従来の充填装置のようなエアアクチュエータの配設が不必要となり、エアアクチュエータの切換(駆動)音よりも静音で充填作業を行うことができる。
【0024】
さらに、第2の特徴を備えた液体充填方法によれば、前記押さえ部材が可撓性チューブを押圧してその液流路を閉塞している状態において、この閉塞状態を維持しつつ該押さえ部材の該可撓性チューブに押圧している位置を液流路の上流側へ移動させ、負圧を利用して過分な液体を該押さえ部材の該可撓性チューブに押圧している位置と前記充填ノズルとの間の液流路内に吸い上げることで、充填ノズル先端に残存する液滴を液流路内に吸い上げ、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止したり、過充填となった液体を容器から吸引して定量充填を実行することが可能となる。
【0025】
このように、本発明の液体充填方法によれば、静音駆動で、定量充填の精度を向上させることができ、液体の微量な追加充填と吸引によるフィードバック制御によれば、さらに高精度な定量充填が可能となる。また、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することも可能となる等の格別な効果を奏する。
【図面の簡単な説明】
【0026】
【図1】本発明の液体充填装置の基本的構成を示す要部断面図
【図2】(a)は本発明の第1実施形態の液体充填装置における大容量充填状態を示す要部断面図、(b)は本発明の第1実施形態の液体充填装置における小容量充填状態を示す要部断面図、(c)は本発明の第1実施形態の液体充填装置における閉塞状態を示す要部断面図
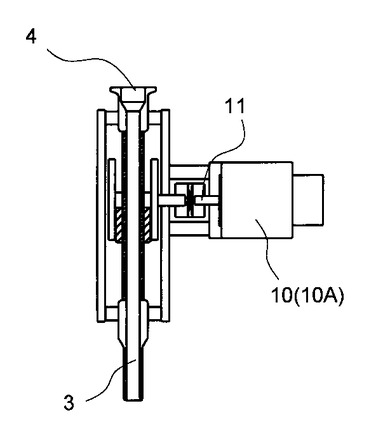
【図3】図2(a)の左視野要部断面図
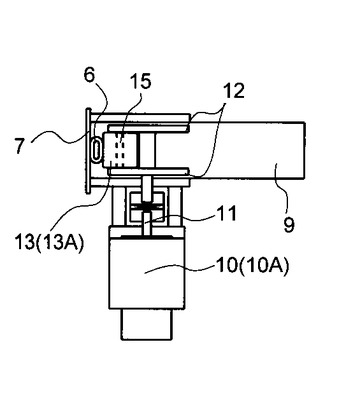
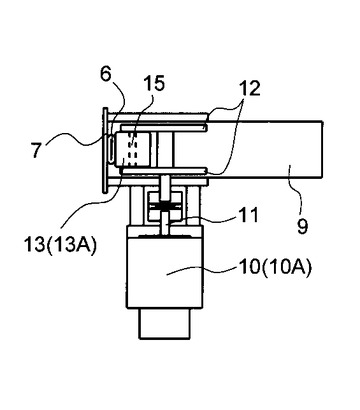
【図4】図2(a)の図面上方から観た要部断面図
【図5】図2(b)の図面上方から観た要部断面図
【図6】図2(c)の図面上方から観た要部断面図
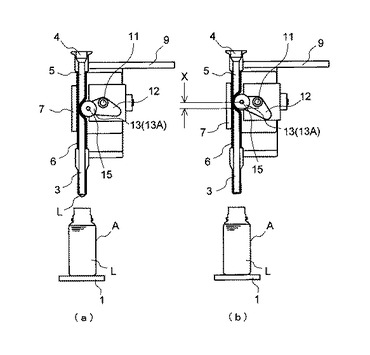
【図7】(a)は本発明の第1実施形態の液体充填装置における充填後に、充填ノズルに液滴がある状態を示す要部断面図、(b)は(a)の本発明の第1実施形態の液体充填装置における充填後に、充填ノズルにあった液滴を吸引した状態を示す要部断面図
【図8】本発明の第1実施形態の液体充填装置における押さえ部材の別の形状例を示す要部断面図
【図9】本発明の第1実施形態の液体充填装置における回転子の別の形状例を示す要部断面図
【図10】(a)は本発明の第2実施形態の液体充填装置における押さえ部材の形状と閉塞状態を示す要部断面図、(b)は本発明の第2実施形態の液体充填装置における押さえ部材の形状と大容量充填状態を示す要部断面図
【図11】図10(a)の図面上方から観た要部断面図
【図12】図10(b)の図面上方から観た要部断面図
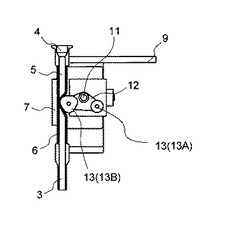
【図13】(a)は本発明の第3実施形態の液体充填装置における閉塞状態を示す要部断面図、(b)は本発明の第3実施形態の液体充填装置における大容量充填状態を示し、復元部材と可撓性チューブの位置関係を示す要部断面図
【図14】図13(a)の図面上方から観た要部断面図
【図15】図13(b)の図面上方から観た要部断面図
【図16】は本発明の第3実施形態の液体充填装置における復元部材の別の形状例を示す要部断面図
【図17】図16の図面上方から観た要部断面図
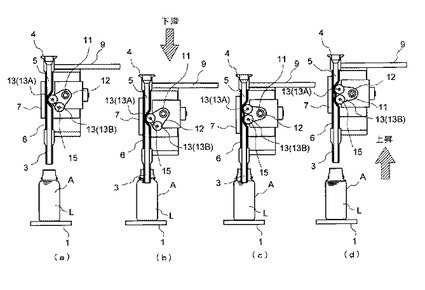
【図18】(a)は本発明の第4実施形態の液体充填装置における充填量不足での閉塞状態を示す要部断面図、(b)は本発明の第4実施形態の液体充填装置における追加充填時の小容量充填状態を示す要部断面図、(c)は本発明の第4実施形態の液体充填装置における充填量補正後の閉塞状態を示す要部断面図
【図19】(a)は本発明の第4実施形態の液体充填装置における過充填での閉塞状態を示す要部断面図、(b)は本発明の第4実施形態の液体充填装置における充填ノズルの液中挿入状態を示す要部断面図、(c)は本発明の第4実施形態の液体充填装置における過分液の吸い上げ時の状態を示す要部断面図、(d)は本発明の第3実施形態の液体充填装置における過分液の吸い上げ後の閉塞状態を示す要部断面図
【図20】(a)は本発明の第5実施形態の液体充填装置における閉塞状態を示し、直動式電動アクチュエータの配設状態を示す要部断面図、(b)は本発明の第5実施形態の液体充填装置における大容量充填状態を示し、直動式電動アクチュエータの配設状態を示す要部断面図
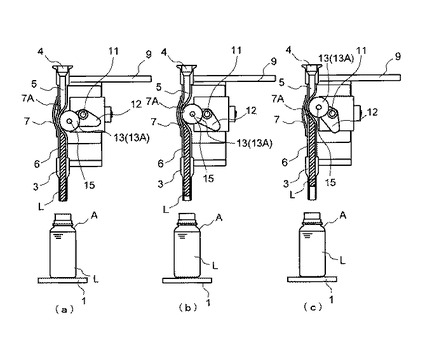
【図21】本発明の液体充填装置における壁部材の別の構成例を示す要部断面図であり、(a)は充填直後の状態における押さえ部材と壁部材の湾曲面領域との位置関係と残存液の状態を示す要部断面図、(b)は過分液の吸い上げ時における押さえ部材と壁部材の湾曲面領域との位置関係と残存液の状態を示す要部断面図、(c)は過分液の吸い上げ後における押さえ部材と壁部材の湾曲面領域との位置関係と残存液の状態を示す要部断面図
【図22】従来の液体充填装置の概略を示す断面図
【発明を実施するための形態】
【0027】
次に、本発明の液体充填装置および液体充填方法の実施形態を図面に基づいて説明する。
【0028】
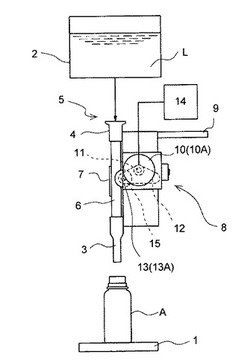
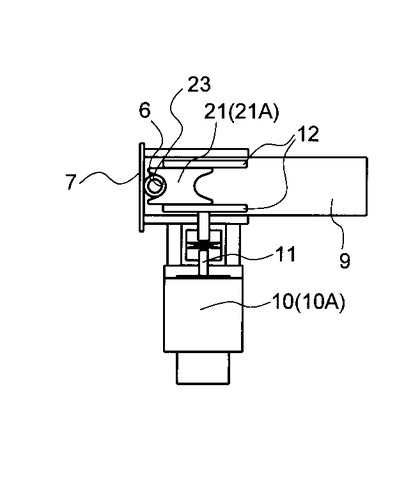
本発明の液体充填装置は、図1に示すように、テーブル1上に載置した容器Aに対し、食品等の液体の定量の充填処理が行われるものであり、充填する液体Lを貯留するタンク2と、充填部位において容器Aの上方に位置される充填ノズル3と、タンク2と充填ノズル3との間を接続させる配管4を有する液流路5と、液流路5の一定区間に配設されて前記配管4と共に該液流路5を構成する可撓性チューブ6と、液流路5に沿って配置された壁部材7との間に可撓性チューブ6を挟んで押圧し、液流路5の開閉操作を行う作動手段8とを備えている。
【0029】
<第1実施形態>
ここで、図2乃至図9に示す第1実施形態の液体充填装置において、可撓性チューブ6は、液流路5に設けたゴム等の可撓性(弾性)を有する素材により断面円形のチューブ状に形成され、タンク2に接続された配管5の端末部に接続されている。
【0030】
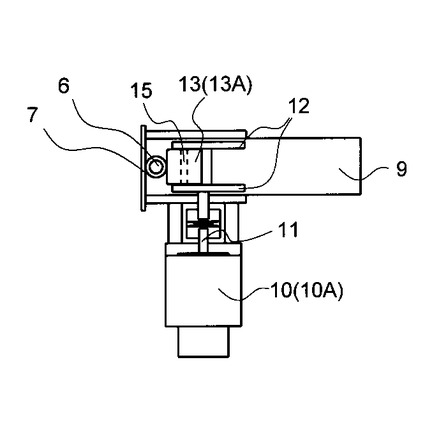
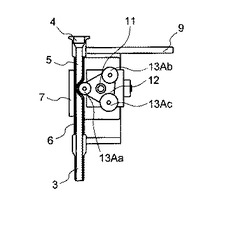
作動手段8は、可撓性チューブ6が配設された液流路5部分において、可撓性チューブ6を押圧し、または、その押圧を解除することで、液流路5の開閉操作を行うものであり、配管4からなる液流路5に付設した支持体9に配設された駆動手段10としての駆動モータ10Aと、この駆動モータ10Aの回転軸11と同心に軸支され、駆動モータ10Aの駆動により正逆回動可能とされた回転子12と、この回転子12の一側部に配設され、回転子12の正逆回動により、可撓性チューブ6を支持体9と一体に形成された壁部材7との間に挟み、その押圧状態(押し付け量)を調整可能とされた押さえ部材13と、入力設定された駆動条件に基づき、駆動モータ10Aの駆動を制御し、回転子12の回動量(回転角度)を調整する制御部14とを備える。また、駆動モータ10Aとしては、ステッピングモータ、サーボモータ等のモータを利用することができる。なお、以下の第4実施形態までは、押さえ部材13の可撓性チューブ6に対する押圧を弱めるときの前記駆動モータ10Aおよび回転子12の回転方向を「正方向」と概念し、押さえ部材13の可撓性チューブ6に対する押圧を強めるときの前記駆動モータ10Aおよび回転子12の回転方向を「逆方向」と概念して説明する。
【0031】
ここで、押さえ部材13は、比較的硬質材により成形されており、可撓性チューブ6の外側部においてその長さ方向の略中間部に当接するように配設されており、可撓性チューブ6を押圧し、閉塞した際の内径(幅)より幅広の当接面を有する必要がある。本実施形態においては、回転子12の回動に伴って、可撓性チューブ6の外側面を円滑に転動し得る遊転状態に軸15により取り付けられたローラ状の押さえローラ13Aを用いている。このように、押さえ部材13を回転子12に軸支し、可撓性チューブ6との係合時に自らが回転しつつ摺接させる構成とすることで、可撓性チューブ6に対する当接時の摩擦を弱めることができ、可撓性チューブ6の耐久寿命を長くすることができる。
【0032】
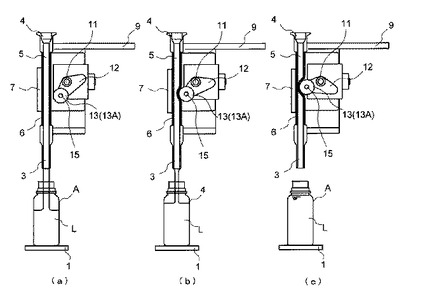
そして、制御部14は、充填に関する様々な情報(例えば、時間当たりの充填量、液体Lの1gの充填にかかる時間、作動手段8による液流路5の開閉動作のタイミング、該開閉動作に要する時間等)に基づき、駆動モータ10Aの駆動を制御して回転子12の正逆方向の回動量(回動角度)を調整することにより、図2(a)に示す、押さえローラ13Aが可撓性チューブ6に非当接であり、液流路5を全開として大流量を得られる状態(以下、大流量充填状態という)から、図2(b)に示す、押さえローラ13Aが可撓性チューブ6を壁部材7との間に挟み、押圧して、液流路5を全開状態と全閉状態の間の任意の位置で半開として任意の流量を得られる状態(以下、小流量充填状態という)を介し、図2(c)に示す、押さえローラ13Aが可撓性チューブ6を壁部材7との間に強く挟み込み、押圧して、液流路5を全閉として閉塞する状態(以下、閉塞状態という)とするように作動手段8を動作させ、または逆に、前記閉塞状態から、小流量充填状態を介して、大流量充填状態とするなど、作動手段8を充填バルブとして動作させて充填状態を切換える。なお、図3は図2(a)の図中左方から観た要部断面図、図4は図2(a)の図中上方から観た要部断面図、図5は図2(b)の図中上方から観た要部断面図、図6は図2(c)の図中上方から観た要部断面図であり、押さえローラ13Aと可撓性チューブ6との位置関係を示す参照図である。
【0033】
なお、本実施形態の液体充填装置は、容器Aに対する液体Lの充填量を検出するための不図示の公知の充填量検出手段を備えている。充填量検出手段は、いわゆる重量式・流量式の別を問わない。前記制御部14は、該充填量検出手段により検出した充填量に基づき、駆動モータ10Aの駆動を制御し、回転子12の回動量を調整可能とされている。
【0034】
そして、前述のように構成される本実施形態の液体充填装置において、前記作動手段8は充填バルブとして以下のように作用する。なお、本実施形態の液体充填装置における作用とその効果に関する記述は、本発明の液体充填方法の詳細な説明を兼ねるものとする(各実施形態において同じ)。
【0035】
液体供給部である液体タンク2より供給される液体Lは、液流路5としての配管4から可撓性チューブ6内に流入する。
【0036】
容器Aが液体Lの充填位置である、充填ノズル3の直下に供給されるとき、図2(c)に示すように、可撓性チューブ6は、作動手段8における制御部14の制御により駆動モータ10Aを逆回転で駆動させ、該駆動モータ10Aの回転軸11と同心で回転可能に軸支されている回転子12を所定量だけ逆方向へ回動させ、回転子12の一側部に軸支した押さえローラ13Aを、可撓性チューブ6の液流路5の下流側から上流側(図面内上方)へ所定量だけ揺動移動させて、図6に示すように、可撓性チューブ6を押圧し、液流路5を閉塞させておく。よって、押さえローラ13Aが可撓性チューブ6を押圧している箇所よりも下流側に位置する充填ノズル3へは液体Lが送り込まれない。
【0037】
この状態で、制御部14の制御により、駆動モータ10Aを正回転で駆動させて、回転子12を所定量だけ正方向へ回動させ、押さえローラ13Aを液流路5の上流側から下流側へ(図面内下方へ)揺動移動させて、図2(b)および図5に示す、小流量充填状態を介し、図2(a)および図4に示すように、押さえローラ13Aが可撓性チューブ6に非当接となる状態とする。このとき、可撓性チューブ6の可撓性により、押さえローラ13Aの押圧により形成されていた可撓性チューブ6の凹みが復元し、可撓性チューブ6からなる液流路5を全開として大流量充填状態となる。
【0038】
したがって、液体Lは、その重力または該液体Lへの加圧により可撓性チューブ6からなる液流路5内を流下し、該可撓性チューブ6の全内径量分が流動する、いわゆる大容量充填が容器Aに対し充填ノズル3から行われる。
【0039】
容器Aの充填が終了近くなれば、その定量充填等の精度を向上させるため、液流路5の流量を絞ることが望ましい。よって、制御部14の制御により駆動モータ10Aを逆回転で駆動させ、回転子12を所定量だけ逆方向へ回動させ、回転子12の一側部に軸支した押さえローラ13Aを可撓性チューブ6の液流路5の下流側から上流側へ(図面内上方へ)揺動移動させて、図2(b)および図5に示すように、小流量充填状態に切換え、容器Aに液体Lを少しずつ充填する。
【0040】
そして、液体Lの規定量が容器A内に充填されるとき、制御部14の制御により駆動モータ10Aを逆方向へ駆動させて、回転子12をさらに所定量だけ逆方向へ回動させ、回転子12の一側部に軸支した押さえローラ13Aを可撓性チューブ6の液流路5の下流側から上流側へ(図面内上方へ)さらに揺動移動させて、図2(c)に示すように、可撓性チューブ6の液流路5を閉塞させた閉塞状態とする。これにより、該液流路5を流動していた液体Lはその流動が停止され、充填が終了する。
【0041】
このように、本実施形態の液体充填装置は、液流路5の開閉を駆動モータ10Aの正逆回動駆動により回転子12を正逆方向へ回動させることによって行ない、充填バルブ動作とするので、液流路5の開閉動作の時間のばらつきが、エアアクチュエータの直動式の押さえ部材を用いる従来の充填装置に比して極めて少なくなる。また、押さえ部材13の動作ストロークのばらつきも少なくなるので、充填精度が極めて向上する。特に、複数個の充填ノズル3を配設し、同時に供給される複数個の容器Aに対し一時に所定量の充填を行うように構成された液体充填装置の場合にも、各充填ノズル3からの充填量を一定に揃えることが簡便となる。
【0042】
また、前述の従来の充填装置のようなエアアクチュエータの配設が不必要となり、エアアクチュエータの切換(駆動)音よりも静音で排気もなく、クリーンな環境で充填作業を行うことができる。
【0043】
なお、本実施形態の液体充填装置は、制御部14において充填に必要な様々な設定を管理することとなる。駆動モータ10Aの駆動については、充填する液体Lの粘性等の特性、充填量、流量、押さえ部材の回動動作スピード等を考慮し、最適な充填状況下で充填が行われる設定が選択されるようにプログラミングしておく。これにより、該液体充填装置に設けられた操作入力手段等から必要な情報等を入力することで、都度の条件にあった駆動モータ10Aの駆動を実行し、液流路5の開放と閉塞を切換えることが可能となる。
【0044】
例えば、本実施形態のように、駆動モータ10Aがステッピングモータの場合は、液体Lの種類に応じ、閉塞状態〜小容量充填状態間の切換えに必要な駆動ステップ数、小容量充填状態〜大容量充填状態間の切換えに必要な駆動ステップ数等を制御部14において管理しておき、該ステップ数を参照し、制御部14で管理する駆動モータ10Aの駆動タイミングに合わせて駆動モータ10Aを正逆回転させる制御が考えられる。充填バルブとして作動手段8を電動制御する本実施形態の液体充填装置は、流量を極めて細かく、無段階に設定することが可能となる。充填時における最終流量を微小流量に絞ることも可能であり、よって、極めて高精度に定量充填を実行することが可能となる。
【0045】
そして、液流路5の開放と閉塞をエアアクチュエータのような機構に拠らず、電動制御とすることで、該液体充填装置に設けられた操作入力手段等から必要な情報等を入力することで設定変更することができるようになるので、作業者の経験やスキルに関係なく、誰にでも簡単に調整することが可能となる。前述のような、複数個の充填ノズル3を配設し、同時に供給される複数個の容器Aに対し一時に所定量の充填を行うように構成された液体充填装置の場合には、各充填ノズル3に対応する作動手段8の制御部14を統括する制御部において一括して管理することにより、設定変更等をより簡便に行なうことが可能となる。
【0046】
また、制御部14で動作データ(ログ)を収集するようにすると、異常の発見や、数値データとして記録を残すことが可能となり、メンテナンス時の故障判断にも役立てることができる。
【0047】
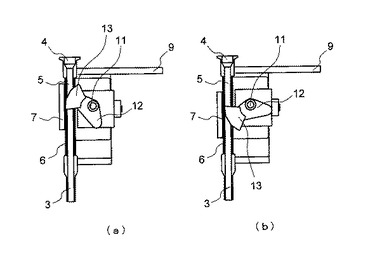
また、本実施形態の液体充填装置は、充填後、図7(a)に示すように、押さえローラ13Aにより可撓性チューブ6を押圧し、液流路5を閉塞させた後、図7(b)に示すように、制御部14の制御により駆動モータ10Aをさらに逆回転で駆動させ、図7(b)に寸法Xで示すように、回転子12を所定量だけ逆方向へ回動させ、回転子12の一側部に軸支した押さえローラ13Aを可撓性チューブ6の液流路5の下流側から上流側へ(図面内上方へ)さらに揺動移動させることにより、押さえローラ13Aが可撓性チューブ6を押圧している箇所よりも下流側の液流路5に残存する微量な液体Lを上流側へ吸い上げ、充填ノズル3の先端に凹状のメニスカスが形成され、表面張力が作用した液垂れに強い液面形状として、充填後の液垂れを防止して充填時の容器等の汚損等を未然に防止することができる(サックバック効果)。
【0048】
これに関連し、充填ノズル3の近傍に、該充填ノズル3の先端の液滴を検出する小型カメラ等の充填ノズル先端液検知手段を配設し、この充填ノズル先端液検知手段により充填ノズル3の先端に液滴が検知されたときにのみ、前記サックバック効果を得るべく、制御部14の制御により駆動モータ10Aを駆動させ、回転子12を所定量だけ逆方向へ回動させ、回転子12の一側部に軸支した押さえローラ13Aを下流側から上流側へさらに揺動移動させてもよい。
【0049】
このように充填ノズル先端液検知手段を配設する構成とすれば、液垂れ防止の処理が必要な場合にのみ、作動手段8の駆動モータ10Aを動作させればよいので、1個あたりの容器Aに対する液量充填の所要時間が短縮ができ、充填作業の効率を向上させることが可能となる。
【0050】
本発明は、液垂れを防止するための手段として上述の何れの方法を採用したとしても、充填ノズル先端の液滴を吸い上げる動作を1つのアクチュエータ(駆動モータ)により実行することができることに変わりない。
【0051】
なお、本実施形態においては、押さえ部材13として、回転子12に回動自在に支持させた円盤状の押さえローラ13Aを用いたが、押さえ部材13はそれに限ることなく、例えば、この円盤状の押さえローラ13Aに代えて、図8に示すように、可撓性チューブ6に面摺接する部分が円弧状とされた略三角形状のおむすび型の押さえローラ13Bであってもよい。
【0052】
また、本実施形態において、回転子12には、図8および図9に示すように、可撓性チューブ6に対する押圧力を異ならせる複数個の押さえ部材13が配設されていてもよい。図8には、円形状の押さえローラ13Aと略三角形状のおむすび型の押さえローラ13Bとを設けた回転子12を示している。そして、図9には、回転子12の外周の3等分位置に、可撓性チューブ6による液流路5を閉塞させる際の最大押圧力を異ならせるように、回転軸11からそれぞれの軸15までの距離を等しくし、押さえローラ13A自体の径寸法を異ならせた大、中、小の3種類の押さえローラ13Aa、13Ab、13Acを配設した場合を示している。このように、回転子12に可撓性チューブ6に対する押圧力を異ならせる押さえ部材13を複数個配設しておくと、駆動モータ10Aの位相を変えることで、流体の特性や使用する可撓性チューブ6の径寸法等に応じて適切な押さえローラ13Aを簡単に選択して使用することができる。そして、最適な形状の押さえ部材13を適宜選択し、可撓性チューブ6の押圧、非押圧を調整しつつ充填処理を行うことで、液垂れの発生防止や所定流量の充填制御の精度向上をより厳密に実行することが可能であることはいうまでもない。なお、回転子12に対し、可撓性チューブ6に対する押圧力を異ならせる複数個の抑え部材13が配設される態様としては、押さえローラ13A自体の径寸法を等しくし、回転軸からそれぞれの軸15までの距離を異ならせて複数個の押さえローラ13Aを配設する態様であってもよい。
【0053】
さらには、回転子12と押さえ部材13とを兼用する構成としてもよい。すなわち、回転子12の外周に円弧状の壁部を形成し、該円弧状の壁部部分を押さえ部材13として用いるようにしてもよい。
【0054】
<第2実施形態>
図10乃至図12に示す本実施形態の液体充填装置においては、作動手段8は、押さえ部材13と壁部材7との間に位置する可撓性チューブ6を、押さえ部材13に形成された溝状の狭窄部に挟み込んで押圧することで、液体の流量を調整が可能に構成されている。
【0055】
前述の第1実施形態と異なる特徴部分について説明すると、本実施形態の回転子12に取り付けられた押さえ部材13は、可撓性チューブ6を挟むための押圧面16が外周に対向形成された挟圧部材13Cとされている。外周に形成された押圧面16は、図10(a)に示すように、駆動モータ10Aの逆回転の駆動により回転子12が逆方向へ回動することにより漸次互いの間隙が狭くなり、可撓性チューブ6を押圧面16間に強く狭んで液流路5を閉塞することができ(図11参照)、逆に、図10(b)に示すように、駆動モータ10Aの正回転の駆動により回転子12が正方向へ回動することにより、漸次互いの間隙が広くなり、可撓性チューブ6の押圧を解除して液流路5を開放することができる(図12参照)ように形成されている。なお、図11は図10(a)の図中上方から観た要部断面図、図12は図10(b)の図中上方から観た要部断面図であり、挟圧部材13Cと可撓性チューブ6との位置関係を示す参照図である。
【0056】
そして、このように構成された本実施形態の液体充填装置においても、制御部14により駆動モータ10Aの駆動を制御することで、作動手段8は充填バルブとして前述の第1実施形態と同様に作用し、同様の効果を得ることができる。
【0057】
<第3実施形態>
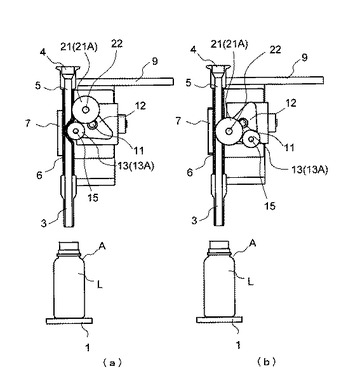
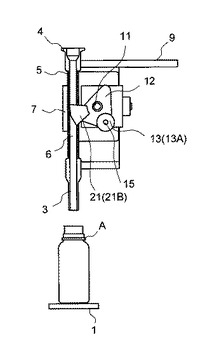
図13乃至図17に示す本実施形態の液体充填装置は、押さえローラ13Aの押圧によって壁部材7との間に押し潰され、押さえローラ13Aによる押圧方向と直交する径方向に延び、断面形状偏平となる可撓性チューブに対し、その押圧で拡幅となる方向から当接することにより、その形状を元の断面円形状に整えるための復元部材21を備えている。なお、図14は図13(a)の図中上方から観た要部断面図、図15は図13(b)の図中上方から観た要部断面図であり、復元部材21と可撓性チューブ6との位置関係を示す参照図である。
【0058】
以下、前述の第1実施形態と異なる特徴部分について説明すると、復元部材21は、回転子12の正方向の回転時における押さえローラ13Aの下流側に取り付けられており、押さえローラ13と同様、回転子12の回動に伴って可撓性チューブ2の外側面を円滑に転動し得る遊転状態に軸22により取り付けられたローラ状の復元ローラ21Aとして形成されている。
【0059】
この復元ローラ21Aの可撓性チューブ6に対向する外周面には、可撓性チューブ6の偏平となっている径方向側部に当接して可撓性チューブ6の形状を整えるべく、可撓性チューブ6の断面形状に倣った丸溝23が形成されている。
【0060】
前述のように構成される本実施形態の液体充填装置において、作動手段8は前述の充填バルブとして作用するとともに、以下のように、可撓性チューブ6の形状復元補助機構として作用する。
【0061】
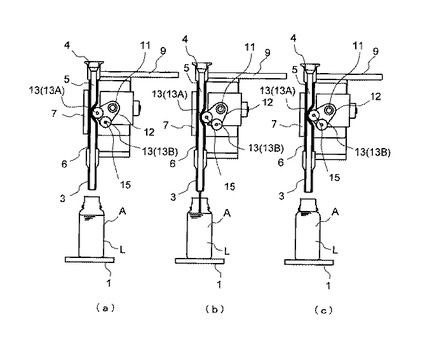
本実施形態においては、図13(a)に示すように、可撓性チューブ6からなる液流路5が閉塞状態となり、充填が終了したあと、次の容器Aに対する所定量の充填を行う際に、図13(b)に示すように、制御部14の制御により駆動モータ10Aを正回転で駆動させ、回転子12を所定量だけ正方向へ回動させて、小流量充填状態を経て大流量充填状態とする。
【0062】
本実施形態の液体充填装置においては、押さえローラ13Aの可撓性チューブ6に対する当接を解除して大流量充填状態とするとき、その押さえローラ13Aと入れ代わりに、押さえローラ13Aの直下流に配設されている復元ローラ21Aが可撓性チューブ6に係合するように、制御部14の制御により駆動モータ10Aを正回転で駆動させ、回転子12を正方向へ回動させる。その際、復元ローラ21Aは可撓性チューブ6に対し、回転子12の回動にあわせ、前記押さえローラ13Aによって押し潰されたときに拡幅となる方向から該可撓性チューブ6に当接し、最終的には、図13(b)および図15に示すように、可撓性チューブ6を復元ローラ21Aの外周面に形成されている丸溝23内に押し込むように作用する。
【0063】
これにより、押さえローラ13Aにより押圧され、偏平となっていた可撓性チューブ6は、自己の特性である可撓性による復元力とともに、復元ローラ21Aと当接することにより、その復元が補助され、断面形状が矯正されることにより、その耐久寿命を可及的に向上させることが可能となる。そして、このようにして断面形状が復元され、矯正された可撓性チューブ6は、潰れを原因とする時間当たりの充填流量のばらつきを抑えることができるので、定量充填をより確実なものとすることができる。
【0064】
特に、本実施形態のように可撓性チューブ6の復元部材21を設けることにより、押さえ部材13によって押圧されて潰れてしまった後の復元が難しかった大口径の可撓性チューブ6を安心して利用できるようになる。つまり、大口径の可撓性チューブ6も、復元部材21によって形状復元が補助されることで流量が安定する。
【0065】
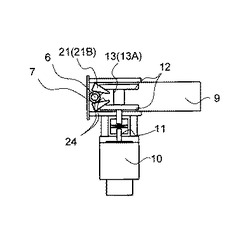
なお、本実施形態の復元ローラ21Aは、可撓性チューブ6の断面形状に倣った丸溝23が円環状に形成されており、丸溝23の内壁が可撓性チューブ6の側部に当接してガイドする構成としたが、復元部材21の構成はこれに限るものではなく、例えば、図16および図17に示すような、可撓性チューブ6の側部に当接してガイドする一対のガイド面24を備えた板状部材である復元板21Bであってもよい。
【0066】
<第4実施形態>
図18および図19に示す本実施形態の液体充填装置は、充填後の充填量検出手段による検出結果が液体Lの供給不足を示すときには不足分の液体Lを追加充填し、充填後の充填量検出手段による検出結果が液体Lの過充填を示すときには過分の液体Lを吸引して定量充填を行なう構成を備えている。
【0067】
この実施形態について、前述の第1実施形態と異なる特徴部分について説明すると、本実施形態の液体充填装置は、容器Aに充填された液体L中に充填ノズルの先端を位置させるノズル挿入機構として、充填ノズル2を容器に対し接離可能とされたノズル昇降機構を備えている。なお、前記ノズル挿入機構としては、容器Aを載置するテーブル1を充填ノズル3に対し接離可能とされたテーブル昇降機構であってもよい。これらのノズル挿入機構は、公知の構成とし、本実施形態においては、制御部14により、駆動が制御されるものとする。
【0068】
また、回転子12には、回転子12の回動によって共に可撓性チューブ6を壁部材7との間に挟み、液流路5を閉塞することが可能に、一対の押さえ部材13としての押さえローラ13A,13Bが隣位させて取り付けられている。さらに言えば、本実施形態における一対の押さえローラ13A,13Bは同寸法とされており、回転子12の回転軸11から等距離に設けられた軸15によって回転自在に、隣位させて配設されている。
【0069】
そして、前記したように構成される本発明に係る本実施形態の液体充填装置は、以下のように作用する。
【0070】
本実施形態においては、充填が終了した後、不図示の充填量検出手段による検出結果が液体Lの供給不足を示すときには、不足分の液体Lを追加充填し、逆に、充填量検出手段による検出結果が液体Lの過充填を示すときには、過分の液体Lを吸引して回収するように、制御部14は駆動モータ10Aの駆動を制御する。
【0071】
具体的には、まず、前記一対の押さえローラ13A,13Bのうち、充填ノズル3から離れた位置において可撓性チューブ6に接離する一方の押さえローラ13Aのみを用い、通常の充填作業を行う。すなわち、前記制御部14は、一方の押さえローラ13Aを用い、可撓性チューブ6を壁部材7との間に押圧して液流路5の開閉量を調整し、容器Aに液体Lを供給するように、駆動モータ10Aを正回転で駆動させるように制御し、回転子12を所定量だけ正方向に回動させる。
【0072】
そして、所定の充填が終了したら、作動手段8における制御部14の制御により駆動モータ10Aを逆回転で駆動させ、回転子12を所定量、逆方向へ回動させ、図18(a),図19(a)に示すように、一方の押さえローラ13Aが可撓性チューブ6の液流路5を閉塞させた状態とし、この状態で充填量検出手段により、充填量の過不足を検出する。
【0073】
その検出結果が液体Lの供給不足を示すときには、制御部14は、図18(b)に示すように、作動手段8における制御部14の制御により駆動モータ10Aを正回転で駆動させて、回転子12を所定量、正方向へ回動させ、小流量充填状態とする。そして、供給不足分の充填を完了させたところで、制御部14の制御により駆動モータ10Aを逆回転で駆動させて、回転子12を所定量だけ逆方向へ回動させ、再び、図18(c)に示すような閉塞状態として充填を完了させる。
【0074】
一方、図19(a)のように、容器Aに対する充填量が多く、充填量検出手段の検出結果が液体Lの過充填を示すときには、図19(b)のように、一方の押さえローラ13Aが可撓性チューブ6の液流路5を閉塞させた状態となっている状態で、不図示の充填ノズル昇降機構を駆動させ、充填ノズル3を下降させることによりその先端を容器Aに充填された液体L中に位置させる。
【0075】
この状態で、制御部14は、駆動モータ10Aを逆回転で駆動させ、図19(c)に示すように、充填ノズル3に近い位置において可撓性チューブ6に接離する他方の押さえローラ13Bにより、可撓性チューブ6を壁部材7との間に押圧しつつ、一方の押さえローラ13Aが閉塞している位置から充填ノズル3までの間の液流路5内に、負圧によって容器Aから過分な液体Lを吸い上げ、回収するように、回転子12を逆方向に回転させるように制御する。
【0076】
その後、図19(d)に示すように、前記充填ノズル昇降機構を駆動させ、充填ノズル3を上昇させて、定量充填を完了させる。
【0077】
そして、次の充填時には、一対の押さえローラ13A,13Bがともに可撓性チューブ6を押圧している状態から、制御部14の制御により駆動モータ10Aを正回転で駆動させて、回転子12を所定量だけ正方向に回動させ、一方の押さえローラ13Aのみによる閉塞状態と小流量充填状態とを経て、大流量充填状態とし、所定量の充填を実行する。
【0078】
このように、本実施形態の液体充填装置によれば、充填量検出手段により検出した充填量に基づき液体Lの微量な追加充填と回収とを行うフィードバック制御を実行することで、定量充填をさらに確実なものとすることができる。
【0079】
なお、本実施形態においては、充填量検出手段の検出結果が液体Lの過充填を示すときに、あらためて充填ノズル昇降機構を駆動させ、充填ノズル3を下降させることによりその先端を容器Aに充填された液体L中に位置させるように制御する構成としたが、例えば、常に、充填ノズル3の先端を容器Aの底部付近まで挿入してから充填を開始するように制御される充填装置の場合は、その順に従うものとする。
【0080】
<第5実施形態>
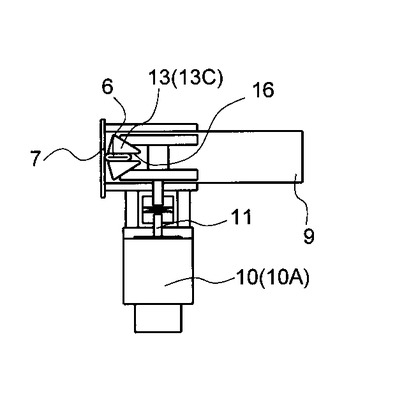
図20に示す本実施形態の液体充填装置は駆動手段10として、前述の実施形態の駆動モータ10Aに代えて、直動式電動アクチュエータ10Bを用いている。
【0081】
この実施形態について、前述の第1実施形態と異なる特徴部分について説明すると、本実施形態の液体充填装置は、押さえローラ13Aが配設された回転子12は、支持体9に対し軸26により正逆回動可能に軸支されるとともに、前記軸26を中心にして押さえローラ13Aと大きく離間する位置に、直動式電動アクチュエータ10Bの駆動により進退移動するシャフト28の先端を連結させる連結部材27が配設されている。連結部材27は回転子12に対し回転軸31により回動自在に接続されている。また、直動式電動アクチュエータ10Bは、シャフト28の先端に連設された連結部材27を回転子12に形成された回転軸31に連結させ、シャフト28の進退移動に伴って回転子12が正逆回動するように、その本体29を支持体9に対して軸30により揺動可能に配設されている。そして、制御部14は、直動式アクチュエータ10Bの駆動を制御する。なお、本実施形態においても、前述までの実施形態に倣って、押さえ部材13の可撓性チューブ6に対する押圧を弱めるときの直動式電動アクチュエータ10Bの進退方向および回転子12の回転方向を「正方向」と概念し、押さえ部材13の可撓性チューブ6に対する押圧を強めるときの前記直動式電動アクチュエータ10Bの進退方向および回転子12の回転方向を「逆方向」と概念して、以下、説明する。
【0082】
前記したように構成される本実施形態の液体充填装置は、制御部14が直動式電動アクチュエータ10Bの駆動を制御し、図20(a)に示すように、シャフト28を延伸させ(逆方向へ移動させ)ると、連結部材27は自らも回転軸27aを中心に回動しつつ、回転子12を逆方向へ押し遣り、回動させるように作用する。そして、回転子12の回動で押さえローラ13Aを可撓性チューブ6の液流路5の下流側から上流側(図面内上方)へ揺動移動させることにより、可撓性チューブ6に対する押さえローラ13Aの当接と押圧を強めることができる。
【0083】
また、制御部14が直動式電動アクチュエータ10Bの駆動を制御し、図20(b)に示すように、シャフト28を短縮させ(正方向へ移動させ)ると、連結部材27は自らも回転軸31を中心に回動しつつ、回転子12を正方向へ引っ張って回動させるように作用する。そして、回転子12の回動で押さえローラ13Aを液流路5の上流側から下流側へ(図面内下方へ)揺動移動させることにより、可撓性チューブ6に対する押さえローラ13Aの押圧を弱めたり、非当接とすることができる。
【0084】
よって、本実施形態の液体充填装置においても、制御部14により駆動手段10としての直動式電動アクチュエータ10Bの駆動を制御することで、回転子12の正逆方向の回動量を調整し、回転子12に設けられた押さえ部材13の可撓性チューブ6に対する押圧状態を変化させることにより液流路5内を流れる液体の流量を調整し、前述の各実施形態と同様の効果を得ることができる。
【0085】
本発明は、前述した実施の形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【0086】
例えば、本発明の液体充填装置における壁部材7は、図21に示すように、可撓性チューブ6の当接面に押さえ部材13の回動軌跡に沿った断面円弧状の湾曲面領域7Aを形成し、その湾曲面領域7Aと押さえ部材13との間に可撓性チューブ6を挟圧するようにしてもい。このような構成とすることで、液流路5を広い接触面で閉塞可能となり、シール効果をより向上させることができる。また、このように壁部材7を形成すると、可撓性チューブ6を押圧したままの状態で押さえ部材13が回転子12の回動に合わせて正逆方向へ移動する際のストロークが大きくなるので(図21(a)乃至図21(c)参照)、前述したような、充填ノズル3の先端の液滴や過分な液体Lの吸い上げ量や、不足分の液体の追加充填量をより多くすることが可能となる。
【0087】
このような壁部材7の構成は、図2、図7、あるいは図20に示す実施形態のように、回転子12に1つの押さえローラ13Aのみが配設されている場合や、回転子12自体を押さえ部材13として兼用する場合のみならず、図19に示す実施形態のように押さえ部材13として一対の押さえローラ13A、13Bを用いる場合等にも適用可能である。
【0088】
また、回転子12の回動に合わせて押さえ部材13が可撓性チューブ6を押圧したままの状態で正逆方向へ移動する際のストロークを大きく確保するために、壁部材7の少なくとも可撓性チューブ6の当接面を弾性部材で形成し、その可撓性チューブ6の押圧の程度により該当接面が凹状に弾性変形するように構成することも可能である。
【符号の説明】
【0089】
1 テーブル
2 タンク
3 充填ノズル
4 配管
5 液流路
6 可撓性チューブ
7 壁部材
8 作動手段
9 支持体
10 駆動手段
10A 駆動モータ
10B 直動式電動アクチュエータ
11 回転軸
12 回転子
13 押さえ部材
13A 押さえローラ
13B 押さえローラ
13C 挟圧部材
14 制御部
15 軸
16 押圧面
21 復元部材
21A 復元ローラ
21B 復元板
22 軸
23 丸溝
24 ガイド面
25 板状部材
26 軸
27 連結部材
28 シャフト
29 本体
30 軸
31 回転軸
A 容器
L 液体
【技術分野】
【0001】
本発明は、スタンディングパウチ、アンプル、壜等の容器に液体を定量充填するための液体充填装置および液体充填方法に関するものである。
【背景技術】
【0002】
充填包装業界等においては、容器へ定量充填するために、その充填経路における充填ノズルの手前に充填バルブを設け、この充填バルブを作動させることにより、充填開始および停止あるいはその充填流量の調整等が行われている。
【0003】
例えば、図22に示す充填装置においては、充填すべき液体を蓄えた不図示の液体タンクから充填ノズルまで液体を導く液通路50を設け、該液通路50の一定区間に可撓性チューブ51を設け、この可撓性チューブ51を押圧する進退移動可能な押圧部材52,53を上下に複数設けて充填バルブとし、充填時に前記押圧部材52,53により可撓性チューブ51の流量を制御すると共に、充填停止時に、下流側の押圧部材53を前進位置から後退位置へ移動させてサックバック現象を生じさせて液垂れを防止する液体充填を行っていた(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−52902号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、この押圧部材52,53の進退移動の反復作動が行われると、可撓性チューブ51に必要以上の疲労が生じて早期に劣化し、可撓性チューブ51の復元力が消失してしまい、潰れたままの状態となることで、時間当たりの充填流量が変わってしまう(少なくなる)ことがあった。
【0006】
さらには、複数個の充填ノズルを配設し、同時に供給される複数個の容器に対し一時に所定量の充填を行うように構成された充填装置(例えば、ロータリー式充填装置)の場合は、各充填ノズルに対して複数個づつ配設される押圧部材や押圧部材を作動させるエアアクチュエータにもそれぞれ個体差があり、動作時間や動作ストロークにばらつきがあるため、各充填ノズルの充填量を一定に揃えるように調整することが困難な作業となり、その調整にも経験やスキルを要するため、作業者が限られる等の様々な問題点を有していた。
【0007】
本発明は前記した問題点を解決するためになされたもので、液体の充填にあって、定量充填を確実なものとし、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することができ、可撓性チューブの耐久寿命を可及的に向上させるとともに、充填装置の配設や設定を簡単かつ確実に行うことができ、しかも、静音で駆動可能な液体充填装置と、同様に、液体の充填にあって、定量充填を確実なものとし、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することができる液体充填方法を提供することを目的としている。
【課題を解決するための手段】
【0008】
前記課題を解決する本発明の液体充填装置は、充填する液体を貯留するタンクと、容器に前記液体を注入する充填ノズルと、前記タンクと前記充填ノズルとの間に配設され、一定区間が可撓性チューブにより構成された液流路と、前記液流路の開閉操作を行う作動手段と、前記容器に対する液体の充填量を検出する充填量検出手段と、前記充填量検出手段の検出結果に基づいて前記作動手段の駆動を制御する制御部と、を備える液体充填装置であって、前記作動手段は、支持体に配設された駆動手段と、前記駆動手段の駆動により正逆回動可能とされた回転子と、前記回転子の回動により前記可撓性チューブを押圧し、前記液流路の開閉量を調整可能とされた押さえ部材を備え、前記制御部は、前記駆動手段の駆動を制御し、前記回転子の回動量を調整して前記液流路の開閉操作を行なうことを第1の特徴とする。
【0009】
また、本発明の液体充填装置は、容器に充填された液体中に充填ノズルの先端を位置させるノズル挿入機構を備え、前記回転子には、該回転子の回動により可撓性チューブを押圧して前記液流路を閉塞することが可能な一対の押さえ部材が配設されており、前記制御部は、前記充填量検出手段の検出結果により供給不足が検出された場合には、前記一対の押さえ部材のうち、前記充填ノズルから離れた位置において前記可撓性チューブに接離する一方の押さえ部材により、前記可撓性チューブを押圧して前記液流路の開閉量を調整し、前記容器に不足分の液体を追加充填するように前記駆動手段の駆動を制御し、前記充填量検出手段の検出結果により過充填が検出された場合には、前記一方の押さえ部材により液流路を閉塞した状態で、前記ノズル挿入機構を駆動させて前記容器に充填された液体中に充填ノズルの先端を位置させ、前記一対の押さえ部材のうちの前記充填ノズルに近い位置において前記可撓性チューブに接離する他方の押さえ部材で前記可撓性チューブを押圧して、前記一方の押さえ部材が閉塞している位置から充填ノズルまでの間の液流路内に前記容器から所定量の液体を負圧によって回収するように、前記駆動手段の駆動を制御することを第2の特徴とする。
【0010】
さらに、本発明の液体充填装置は、前記回転子には、可撓性チューブに対し、前記押さえ部材によって押圧されたときに拡幅となる方向から当接し、その断面形状を押圧される前の状態に復元させる復元部材が配設されており、前記制御部は、押さえ部材の可撓性チューブに対する押さえ部材の当接を解除するときに、押さえ部材と入れ変わりに復元部材が可撓性チューブに係合するように前記回転子を回動させるように前記駆動手段の駆動を制御することを第3の特徴とする。
【0011】
またさらに、本発明の液体充填装置は、充填ノズルの先端から露出する液滴の有無を検出可能なノズル先端液検知手段を備え、前記制御部は、前記充填ノズル先端液検知手段により充填ノズルの先端に液滴が検知されたときに、可撓性チューブを押圧して液流路を閉塞させている押さえ部材により引き続き可撓性チューブを押圧させて液流路を閉塞させつつ、可撓性チューブの押圧位置を液流路の上流側へ移動するように前記回転子を回動させるように前記駆動手段の駆動を制御することを第4の特徴とする。
【0012】
そして、本発明の液体充填方法は、充填する液体を貯留するタンクと充填ノズルとの間に配設された液流路の一定区間に該液流路を構成するように配設された可撓性チューブを押圧し、前記液流路内を流れる液体の流量を調整しつつ、定量充填を行なう液体充填方法であって、駆動手段の駆動を制御して回転子の正逆方向の回動量を調整し、前記回転子に設けられた押さえ部材の可撓性チューブに対する押圧状態を変化させることにより前記液流路内を流れる液体の流量を調整することを第1の特徴とする。
【0013】
また、液体充填後の前記押さえ部材が可撓性チューブを押圧してその液流路を閉塞している状態において、この閉塞状態を維持しつつ該押さえ部材の該可撓性チューブに押圧している位置を液流路の上流側へ移動させ、負圧を利用して過分な液体を該押さえ部材の該可撓性チューブに押圧している位置と前記充填ノズルとの間の液流路内に吸い上げることを第2の特徴とする。
【発明の効果】
【0014】
前述の第1の特徴を備えた液体充填装置によれば、駆動手段の駆動を制御して前記回転子の正逆方向の回動量を調整することにより、前記押さえ部材が前記可撓性チューブに非当接であり液流路を全開として大流量を得られる大容量充填状態と、前記押さえ部材が前記可撓性チューブを強く挟み込み、強く押圧して、液流路を全閉として閉塞する閉塞状態とを、前記押さえ部材が前記可撓性チューブを前記壁部材との間に挟み、押圧して、液流路を全開状態と全閉状態との間の任意の位置で半開として任意の流量を得られる小流量充填状態を介して相互に切換えることで、定量充填を実行することができる。
【0015】
このような液体充填装置は、駆動手段として、電動モータや直動式電動アクチュエータ等を用いることで実現でき、その場合には、前述の従来の充填装置のようなエアアクチュエータの配設が不必要となり、エアアクチュエータの切換(駆動)音よりも静音で充填作業を行うことができる。
【0016】
また、前記駆動手段の回動量は、充填する液体の粘性、充填量等を考慮して自動的に設定可能にプログラムミングしておくことで、該液体充填装置に設けられた操作入力手段等から必要な情報等を入力して設定することができ、作業者の経験やスキルに関わりなく、誰にでも簡単に調整することが可能となる。
【0017】
また、押さえ部材により可撓性チューブを押圧し、液流路を閉塞させた後、該押さえ部材を可撓性チューブに対する押圧方向へ更に回動させることにより、液流路内に負圧を発生させて、充填ノズル先端に残存する液滴を液流路内に吸い上げ、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することも可能となる。
【0018】
また、充填量検出手段により検出した充填量に基づき、前記駆動手段の駆動を制御して前記回転子の回動量を調整するフィードバック制御を実行することができ、定量充填を確実なものとすることができる。
【0019】
そして、第2の特徴を備えた液体充填装置によれば、充填量検出手段により検出した充填量に基づき、液体の微量な追加供給と回収とを行うフィードバック制御を実行することが可能となり、定量充填をさらに確実なものとすることができる。
【0020】
またさらに、第3の特徴を備えた液体充填装置によれば、充填後に前記復元部材を前記押さえ部材によって押し潰されたときに拡幅となる方向から前記可撓性チューブに当接させることで、可撓性チューブの潰れ形状の復元を補助することができ、可撓性チューブの耐久寿命を可及的に向上させるとともに、前記押さえ部材の非当接時における可撓性チューブの形状を常に所定の形状として保持することで定量充填をより確実なものとすることができる。
【0021】
そして、第4の特徴を備えた液体充填装置によれば、充填ノズル先端液検知手段により、充填ノズルの先端に液滴が検知されたときに、可撓性チューブを押圧し、液流路を閉塞させている押さえ部材を反充填ノズル方向へ更に回動させるように、前記駆動手段の駆動を制御し、液流路内に負圧を発生させて充填ノズル先端に残存する液滴を液流路内に吸い上げるようにすることで、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することができる。そして、このように液垂れを防止することにより、液垂れ時間を充填時間から省くことができるため、容器に対する液量充填の所要時間が短縮ができ、充填作業の効率を向上させることが可能となる。
【0022】
このように、本発明の液体充填装置によれば、液体の微量な追加充填、吸引によるフィードバック制御を可能とし、可撓性チューブの潰れ形状の復元部材を備えて定量充填を確実なものとし、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することができ、可撓性チューブの耐久寿命を可及的に向上させるとともに、充填装置の配設や設定を簡単かつ確実に行うことができる等の格別な効果を奏する。
【0023】
また、前述の第1の特徴を備えた液体充填方法によれば、駆動手段の駆動を制御して回転子の正逆方向の回動量を調整し、前記回転子に設けられた押さえ部材の可撓性チューブに対する押圧状態を変化させることにより前記液流路内を流れる液体の流量を調整することで、無段階に液体の流量を調整可能となり、液体の定量充填をより簡便かつ確実に実行することができる。また、駆動手段として、電動モータや直動式電動アクチュエータを用いれば、前述の従来の充填装置のようなエアアクチュエータの配設が不必要となり、エアアクチュエータの切換(駆動)音よりも静音で充填作業を行うことができる。
【0024】
さらに、第2の特徴を備えた液体充填方法によれば、前記押さえ部材が可撓性チューブを押圧してその液流路を閉塞している状態において、この閉塞状態を維持しつつ該押さえ部材の該可撓性チューブに押圧している位置を液流路の上流側へ移動させ、負圧を利用して過分な液体を該押さえ部材の該可撓性チューブに押圧している位置と前記充填ノズルとの間の液流路内に吸い上げることで、充填ノズル先端に残存する液滴を液流路内に吸い上げ、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止したり、過充填となった液体を容器から吸引して定量充填を実行することが可能となる。
【0025】
このように、本発明の液体充填方法によれば、静音駆動で、定量充填の精度を向上させることができ、液体の微量な追加充填と吸引によるフィードバック制御によれば、さらに高精度な定量充填が可能となる。また、充填後の液垂れを防止して充填時の容器等の汚損を未然に防止することも可能となる等の格別な効果を奏する。
【図面の簡単な説明】
【0026】
【図1】本発明の液体充填装置の基本的構成を示す要部断面図
【図2】(a)は本発明の第1実施形態の液体充填装置における大容量充填状態を示す要部断面図、(b)は本発明の第1実施形態の液体充填装置における小容量充填状態を示す要部断面図、(c)は本発明の第1実施形態の液体充填装置における閉塞状態を示す要部断面図
【図3】図2(a)の左視野要部断面図
【図4】図2(a)の図面上方から観た要部断面図
【図5】図2(b)の図面上方から観た要部断面図
【図6】図2(c)の図面上方から観た要部断面図
【図7】(a)は本発明の第1実施形態の液体充填装置における充填後に、充填ノズルに液滴がある状態を示す要部断面図、(b)は(a)の本発明の第1実施形態の液体充填装置における充填後に、充填ノズルにあった液滴を吸引した状態を示す要部断面図
【図8】本発明の第1実施形態の液体充填装置における押さえ部材の別の形状例を示す要部断面図
【図9】本発明の第1実施形態の液体充填装置における回転子の別の形状例を示す要部断面図
【図10】(a)は本発明の第2実施形態の液体充填装置における押さえ部材の形状と閉塞状態を示す要部断面図、(b)は本発明の第2実施形態の液体充填装置における押さえ部材の形状と大容量充填状態を示す要部断面図
【図11】図10(a)の図面上方から観た要部断面図
【図12】図10(b)の図面上方から観た要部断面図
【図13】(a)は本発明の第3実施形態の液体充填装置における閉塞状態を示す要部断面図、(b)は本発明の第3実施形態の液体充填装置における大容量充填状態を示し、復元部材と可撓性チューブの位置関係を示す要部断面図
【図14】図13(a)の図面上方から観た要部断面図
【図15】図13(b)の図面上方から観た要部断面図
【図16】は本発明の第3実施形態の液体充填装置における復元部材の別の形状例を示す要部断面図
【図17】図16の図面上方から観た要部断面図
【図18】(a)は本発明の第4実施形態の液体充填装置における充填量不足での閉塞状態を示す要部断面図、(b)は本発明の第4実施形態の液体充填装置における追加充填時の小容量充填状態を示す要部断面図、(c)は本発明の第4実施形態の液体充填装置における充填量補正後の閉塞状態を示す要部断面図
【図19】(a)は本発明の第4実施形態の液体充填装置における過充填での閉塞状態を示す要部断面図、(b)は本発明の第4実施形態の液体充填装置における充填ノズルの液中挿入状態を示す要部断面図、(c)は本発明の第4実施形態の液体充填装置における過分液の吸い上げ時の状態を示す要部断面図、(d)は本発明の第3実施形態の液体充填装置における過分液の吸い上げ後の閉塞状態を示す要部断面図
【図20】(a)は本発明の第5実施形態の液体充填装置における閉塞状態を示し、直動式電動アクチュエータの配設状態を示す要部断面図、(b)は本発明の第5実施形態の液体充填装置における大容量充填状態を示し、直動式電動アクチュエータの配設状態を示す要部断面図
【図21】本発明の液体充填装置における壁部材の別の構成例を示す要部断面図であり、(a)は充填直後の状態における押さえ部材と壁部材の湾曲面領域との位置関係と残存液の状態を示す要部断面図、(b)は過分液の吸い上げ時における押さえ部材と壁部材の湾曲面領域との位置関係と残存液の状態を示す要部断面図、(c)は過分液の吸い上げ後における押さえ部材と壁部材の湾曲面領域との位置関係と残存液の状態を示す要部断面図
【図22】従来の液体充填装置の概略を示す断面図
【発明を実施するための形態】
【0027】
次に、本発明の液体充填装置および液体充填方法の実施形態を図面に基づいて説明する。
【0028】
本発明の液体充填装置は、図1に示すように、テーブル1上に載置した容器Aに対し、食品等の液体の定量の充填処理が行われるものであり、充填する液体Lを貯留するタンク2と、充填部位において容器Aの上方に位置される充填ノズル3と、タンク2と充填ノズル3との間を接続させる配管4を有する液流路5と、液流路5の一定区間に配設されて前記配管4と共に該液流路5を構成する可撓性チューブ6と、液流路5に沿って配置された壁部材7との間に可撓性チューブ6を挟んで押圧し、液流路5の開閉操作を行う作動手段8とを備えている。
【0029】
<第1実施形態>
ここで、図2乃至図9に示す第1実施形態の液体充填装置において、可撓性チューブ6は、液流路5に設けたゴム等の可撓性(弾性)を有する素材により断面円形のチューブ状に形成され、タンク2に接続された配管5の端末部に接続されている。
【0030】
作動手段8は、可撓性チューブ6が配設された液流路5部分において、可撓性チューブ6を押圧し、または、その押圧を解除することで、液流路5の開閉操作を行うものであり、配管4からなる液流路5に付設した支持体9に配設された駆動手段10としての駆動モータ10Aと、この駆動モータ10Aの回転軸11と同心に軸支され、駆動モータ10Aの駆動により正逆回動可能とされた回転子12と、この回転子12の一側部に配設され、回転子12の正逆回動により、可撓性チューブ6を支持体9と一体に形成された壁部材7との間に挟み、その押圧状態(押し付け量)を調整可能とされた押さえ部材13と、入力設定された駆動条件に基づき、駆動モータ10Aの駆動を制御し、回転子12の回動量(回転角度)を調整する制御部14とを備える。また、駆動モータ10Aとしては、ステッピングモータ、サーボモータ等のモータを利用することができる。なお、以下の第4実施形態までは、押さえ部材13の可撓性チューブ6に対する押圧を弱めるときの前記駆動モータ10Aおよび回転子12の回転方向を「正方向」と概念し、押さえ部材13の可撓性チューブ6に対する押圧を強めるときの前記駆動モータ10Aおよび回転子12の回転方向を「逆方向」と概念して説明する。
【0031】
ここで、押さえ部材13は、比較的硬質材により成形されており、可撓性チューブ6の外側部においてその長さ方向の略中間部に当接するように配設されており、可撓性チューブ6を押圧し、閉塞した際の内径(幅)より幅広の当接面を有する必要がある。本実施形態においては、回転子12の回動に伴って、可撓性チューブ6の外側面を円滑に転動し得る遊転状態に軸15により取り付けられたローラ状の押さえローラ13Aを用いている。このように、押さえ部材13を回転子12に軸支し、可撓性チューブ6との係合時に自らが回転しつつ摺接させる構成とすることで、可撓性チューブ6に対する当接時の摩擦を弱めることができ、可撓性チューブ6の耐久寿命を長くすることができる。
【0032】
そして、制御部14は、充填に関する様々な情報(例えば、時間当たりの充填量、液体Lの1gの充填にかかる時間、作動手段8による液流路5の開閉動作のタイミング、該開閉動作に要する時間等)に基づき、駆動モータ10Aの駆動を制御して回転子12の正逆方向の回動量(回動角度)を調整することにより、図2(a)に示す、押さえローラ13Aが可撓性チューブ6に非当接であり、液流路5を全開として大流量を得られる状態(以下、大流量充填状態という)から、図2(b)に示す、押さえローラ13Aが可撓性チューブ6を壁部材7との間に挟み、押圧して、液流路5を全開状態と全閉状態の間の任意の位置で半開として任意の流量を得られる状態(以下、小流量充填状態という)を介し、図2(c)に示す、押さえローラ13Aが可撓性チューブ6を壁部材7との間に強く挟み込み、押圧して、液流路5を全閉として閉塞する状態(以下、閉塞状態という)とするように作動手段8を動作させ、または逆に、前記閉塞状態から、小流量充填状態を介して、大流量充填状態とするなど、作動手段8を充填バルブとして動作させて充填状態を切換える。なお、図3は図2(a)の図中左方から観た要部断面図、図4は図2(a)の図中上方から観た要部断面図、図5は図2(b)の図中上方から観た要部断面図、図6は図2(c)の図中上方から観た要部断面図であり、押さえローラ13Aと可撓性チューブ6との位置関係を示す参照図である。
【0033】
なお、本実施形態の液体充填装置は、容器Aに対する液体Lの充填量を検出するための不図示の公知の充填量検出手段を備えている。充填量検出手段は、いわゆる重量式・流量式の別を問わない。前記制御部14は、該充填量検出手段により検出した充填量に基づき、駆動モータ10Aの駆動を制御し、回転子12の回動量を調整可能とされている。
【0034】
そして、前述のように構成される本実施形態の液体充填装置において、前記作動手段8は充填バルブとして以下のように作用する。なお、本実施形態の液体充填装置における作用とその効果に関する記述は、本発明の液体充填方法の詳細な説明を兼ねるものとする(各実施形態において同じ)。
【0035】
液体供給部である液体タンク2より供給される液体Lは、液流路5としての配管4から可撓性チューブ6内に流入する。
【0036】
容器Aが液体Lの充填位置である、充填ノズル3の直下に供給されるとき、図2(c)に示すように、可撓性チューブ6は、作動手段8における制御部14の制御により駆動モータ10Aを逆回転で駆動させ、該駆動モータ10Aの回転軸11と同心で回転可能に軸支されている回転子12を所定量だけ逆方向へ回動させ、回転子12の一側部に軸支した押さえローラ13Aを、可撓性チューブ6の液流路5の下流側から上流側(図面内上方)へ所定量だけ揺動移動させて、図6に示すように、可撓性チューブ6を押圧し、液流路5を閉塞させておく。よって、押さえローラ13Aが可撓性チューブ6を押圧している箇所よりも下流側に位置する充填ノズル3へは液体Lが送り込まれない。
【0037】
この状態で、制御部14の制御により、駆動モータ10Aを正回転で駆動させて、回転子12を所定量だけ正方向へ回動させ、押さえローラ13Aを液流路5の上流側から下流側へ(図面内下方へ)揺動移動させて、図2(b)および図5に示す、小流量充填状態を介し、図2(a)および図4に示すように、押さえローラ13Aが可撓性チューブ6に非当接となる状態とする。このとき、可撓性チューブ6の可撓性により、押さえローラ13Aの押圧により形成されていた可撓性チューブ6の凹みが復元し、可撓性チューブ6からなる液流路5を全開として大流量充填状態となる。
【0038】
したがって、液体Lは、その重力または該液体Lへの加圧により可撓性チューブ6からなる液流路5内を流下し、該可撓性チューブ6の全内径量分が流動する、いわゆる大容量充填が容器Aに対し充填ノズル3から行われる。
【0039】
容器Aの充填が終了近くなれば、その定量充填等の精度を向上させるため、液流路5の流量を絞ることが望ましい。よって、制御部14の制御により駆動モータ10Aを逆回転で駆動させ、回転子12を所定量だけ逆方向へ回動させ、回転子12の一側部に軸支した押さえローラ13Aを可撓性チューブ6の液流路5の下流側から上流側へ(図面内上方へ)揺動移動させて、図2(b)および図5に示すように、小流量充填状態に切換え、容器Aに液体Lを少しずつ充填する。
【0040】
そして、液体Lの規定量が容器A内に充填されるとき、制御部14の制御により駆動モータ10Aを逆方向へ駆動させて、回転子12をさらに所定量だけ逆方向へ回動させ、回転子12の一側部に軸支した押さえローラ13Aを可撓性チューブ6の液流路5の下流側から上流側へ(図面内上方へ)さらに揺動移動させて、図2(c)に示すように、可撓性チューブ6の液流路5を閉塞させた閉塞状態とする。これにより、該液流路5を流動していた液体Lはその流動が停止され、充填が終了する。
【0041】
このように、本実施形態の液体充填装置は、液流路5の開閉を駆動モータ10Aの正逆回動駆動により回転子12を正逆方向へ回動させることによって行ない、充填バルブ動作とするので、液流路5の開閉動作の時間のばらつきが、エアアクチュエータの直動式の押さえ部材を用いる従来の充填装置に比して極めて少なくなる。また、押さえ部材13の動作ストロークのばらつきも少なくなるので、充填精度が極めて向上する。特に、複数個の充填ノズル3を配設し、同時に供給される複数個の容器Aに対し一時に所定量の充填を行うように構成された液体充填装置の場合にも、各充填ノズル3からの充填量を一定に揃えることが簡便となる。
【0042】
また、前述の従来の充填装置のようなエアアクチュエータの配設が不必要となり、エアアクチュエータの切換(駆動)音よりも静音で排気もなく、クリーンな環境で充填作業を行うことができる。
【0043】
なお、本実施形態の液体充填装置は、制御部14において充填に必要な様々な設定を管理することとなる。駆動モータ10Aの駆動については、充填する液体Lの粘性等の特性、充填量、流量、押さえ部材の回動動作スピード等を考慮し、最適な充填状況下で充填が行われる設定が選択されるようにプログラミングしておく。これにより、該液体充填装置に設けられた操作入力手段等から必要な情報等を入力することで、都度の条件にあった駆動モータ10Aの駆動を実行し、液流路5の開放と閉塞を切換えることが可能となる。
【0044】
例えば、本実施形態のように、駆動モータ10Aがステッピングモータの場合は、液体Lの種類に応じ、閉塞状態〜小容量充填状態間の切換えに必要な駆動ステップ数、小容量充填状態〜大容量充填状態間の切換えに必要な駆動ステップ数等を制御部14において管理しておき、該ステップ数を参照し、制御部14で管理する駆動モータ10Aの駆動タイミングに合わせて駆動モータ10Aを正逆回転させる制御が考えられる。充填バルブとして作動手段8を電動制御する本実施形態の液体充填装置は、流量を極めて細かく、無段階に設定することが可能となる。充填時における最終流量を微小流量に絞ることも可能であり、よって、極めて高精度に定量充填を実行することが可能となる。
【0045】
そして、液流路5の開放と閉塞をエアアクチュエータのような機構に拠らず、電動制御とすることで、該液体充填装置に設けられた操作入力手段等から必要な情報等を入力することで設定変更することができるようになるので、作業者の経験やスキルに関係なく、誰にでも簡単に調整することが可能となる。前述のような、複数個の充填ノズル3を配設し、同時に供給される複数個の容器Aに対し一時に所定量の充填を行うように構成された液体充填装置の場合には、各充填ノズル3に対応する作動手段8の制御部14を統括する制御部において一括して管理することにより、設定変更等をより簡便に行なうことが可能となる。
【0046】
また、制御部14で動作データ(ログ)を収集するようにすると、異常の発見や、数値データとして記録を残すことが可能となり、メンテナンス時の故障判断にも役立てることができる。
【0047】
また、本実施形態の液体充填装置は、充填後、図7(a)に示すように、押さえローラ13Aにより可撓性チューブ6を押圧し、液流路5を閉塞させた後、図7(b)に示すように、制御部14の制御により駆動モータ10Aをさらに逆回転で駆動させ、図7(b)に寸法Xで示すように、回転子12を所定量だけ逆方向へ回動させ、回転子12の一側部に軸支した押さえローラ13Aを可撓性チューブ6の液流路5の下流側から上流側へ(図面内上方へ)さらに揺動移動させることにより、押さえローラ13Aが可撓性チューブ6を押圧している箇所よりも下流側の液流路5に残存する微量な液体Lを上流側へ吸い上げ、充填ノズル3の先端に凹状のメニスカスが形成され、表面張力が作用した液垂れに強い液面形状として、充填後の液垂れを防止して充填時の容器等の汚損等を未然に防止することができる(サックバック効果)。
【0048】
これに関連し、充填ノズル3の近傍に、該充填ノズル3の先端の液滴を検出する小型カメラ等の充填ノズル先端液検知手段を配設し、この充填ノズル先端液検知手段により充填ノズル3の先端に液滴が検知されたときにのみ、前記サックバック効果を得るべく、制御部14の制御により駆動モータ10Aを駆動させ、回転子12を所定量だけ逆方向へ回動させ、回転子12の一側部に軸支した押さえローラ13Aを下流側から上流側へさらに揺動移動させてもよい。
【0049】
このように充填ノズル先端液検知手段を配設する構成とすれば、液垂れ防止の処理が必要な場合にのみ、作動手段8の駆動モータ10Aを動作させればよいので、1個あたりの容器Aに対する液量充填の所要時間が短縮ができ、充填作業の効率を向上させることが可能となる。
【0050】
本発明は、液垂れを防止するための手段として上述の何れの方法を採用したとしても、充填ノズル先端の液滴を吸い上げる動作を1つのアクチュエータ(駆動モータ)により実行することができることに変わりない。
【0051】
なお、本実施形態においては、押さえ部材13として、回転子12に回動自在に支持させた円盤状の押さえローラ13Aを用いたが、押さえ部材13はそれに限ることなく、例えば、この円盤状の押さえローラ13Aに代えて、図8に示すように、可撓性チューブ6に面摺接する部分が円弧状とされた略三角形状のおむすび型の押さえローラ13Bであってもよい。
【0052】
また、本実施形態において、回転子12には、図8および図9に示すように、可撓性チューブ6に対する押圧力を異ならせる複数個の押さえ部材13が配設されていてもよい。図8には、円形状の押さえローラ13Aと略三角形状のおむすび型の押さえローラ13Bとを設けた回転子12を示している。そして、図9には、回転子12の外周の3等分位置に、可撓性チューブ6による液流路5を閉塞させる際の最大押圧力を異ならせるように、回転軸11からそれぞれの軸15までの距離を等しくし、押さえローラ13A自体の径寸法を異ならせた大、中、小の3種類の押さえローラ13Aa、13Ab、13Acを配設した場合を示している。このように、回転子12に可撓性チューブ6に対する押圧力を異ならせる押さえ部材13を複数個配設しておくと、駆動モータ10Aの位相を変えることで、流体の特性や使用する可撓性チューブ6の径寸法等に応じて適切な押さえローラ13Aを簡単に選択して使用することができる。そして、最適な形状の押さえ部材13を適宜選択し、可撓性チューブ6の押圧、非押圧を調整しつつ充填処理を行うことで、液垂れの発生防止や所定流量の充填制御の精度向上をより厳密に実行することが可能であることはいうまでもない。なお、回転子12に対し、可撓性チューブ6に対する押圧力を異ならせる複数個の抑え部材13が配設される態様としては、押さえローラ13A自体の径寸法を等しくし、回転軸からそれぞれの軸15までの距離を異ならせて複数個の押さえローラ13Aを配設する態様であってもよい。
【0053】
さらには、回転子12と押さえ部材13とを兼用する構成としてもよい。すなわち、回転子12の外周に円弧状の壁部を形成し、該円弧状の壁部部分を押さえ部材13として用いるようにしてもよい。
【0054】
<第2実施形態>
図10乃至図12に示す本実施形態の液体充填装置においては、作動手段8は、押さえ部材13と壁部材7との間に位置する可撓性チューブ6を、押さえ部材13に形成された溝状の狭窄部に挟み込んで押圧することで、液体の流量を調整が可能に構成されている。
【0055】
前述の第1実施形態と異なる特徴部分について説明すると、本実施形態の回転子12に取り付けられた押さえ部材13は、可撓性チューブ6を挟むための押圧面16が外周に対向形成された挟圧部材13Cとされている。外周に形成された押圧面16は、図10(a)に示すように、駆動モータ10Aの逆回転の駆動により回転子12が逆方向へ回動することにより漸次互いの間隙が狭くなり、可撓性チューブ6を押圧面16間に強く狭んで液流路5を閉塞することができ(図11参照)、逆に、図10(b)に示すように、駆動モータ10Aの正回転の駆動により回転子12が正方向へ回動することにより、漸次互いの間隙が広くなり、可撓性チューブ6の押圧を解除して液流路5を開放することができる(図12参照)ように形成されている。なお、図11は図10(a)の図中上方から観た要部断面図、図12は図10(b)の図中上方から観た要部断面図であり、挟圧部材13Cと可撓性チューブ6との位置関係を示す参照図である。
【0056】
そして、このように構成された本実施形態の液体充填装置においても、制御部14により駆動モータ10Aの駆動を制御することで、作動手段8は充填バルブとして前述の第1実施形態と同様に作用し、同様の効果を得ることができる。
【0057】
<第3実施形態>
図13乃至図17に示す本実施形態の液体充填装置は、押さえローラ13Aの押圧によって壁部材7との間に押し潰され、押さえローラ13Aによる押圧方向と直交する径方向に延び、断面形状偏平となる可撓性チューブに対し、その押圧で拡幅となる方向から当接することにより、その形状を元の断面円形状に整えるための復元部材21を備えている。なお、図14は図13(a)の図中上方から観た要部断面図、図15は図13(b)の図中上方から観た要部断面図であり、復元部材21と可撓性チューブ6との位置関係を示す参照図である。
【0058】
以下、前述の第1実施形態と異なる特徴部分について説明すると、復元部材21は、回転子12の正方向の回転時における押さえローラ13Aの下流側に取り付けられており、押さえローラ13と同様、回転子12の回動に伴って可撓性チューブ2の外側面を円滑に転動し得る遊転状態に軸22により取り付けられたローラ状の復元ローラ21Aとして形成されている。
【0059】
この復元ローラ21Aの可撓性チューブ6に対向する外周面には、可撓性チューブ6の偏平となっている径方向側部に当接して可撓性チューブ6の形状を整えるべく、可撓性チューブ6の断面形状に倣った丸溝23が形成されている。
【0060】
前述のように構成される本実施形態の液体充填装置において、作動手段8は前述の充填バルブとして作用するとともに、以下のように、可撓性チューブ6の形状復元補助機構として作用する。
【0061】
本実施形態においては、図13(a)に示すように、可撓性チューブ6からなる液流路5が閉塞状態となり、充填が終了したあと、次の容器Aに対する所定量の充填を行う際に、図13(b)に示すように、制御部14の制御により駆動モータ10Aを正回転で駆動させ、回転子12を所定量だけ正方向へ回動させて、小流量充填状態を経て大流量充填状態とする。
【0062】
本実施形態の液体充填装置においては、押さえローラ13Aの可撓性チューブ6に対する当接を解除して大流量充填状態とするとき、その押さえローラ13Aと入れ代わりに、押さえローラ13Aの直下流に配設されている復元ローラ21Aが可撓性チューブ6に係合するように、制御部14の制御により駆動モータ10Aを正回転で駆動させ、回転子12を正方向へ回動させる。その際、復元ローラ21Aは可撓性チューブ6に対し、回転子12の回動にあわせ、前記押さえローラ13Aによって押し潰されたときに拡幅となる方向から該可撓性チューブ6に当接し、最終的には、図13(b)および図15に示すように、可撓性チューブ6を復元ローラ21Aの外周面に形成されている丸溝23内に押し込むように作用する。
【0063】
これにより、押さえローラ13Aにより押圧され、偏平となっていた可撓性チューブ6は、自己の特性である可撓性による復元力とともに、復元ローラ21Aと当接することにより、その復元が補助され、断面形状が矯正されることにより、その耐久寿命を可及的に向上させることが可能となる。そして、このようにして断面形状が復元され、矯正された可撓性チューブ6は、潰れを原因とする時間当たりの充填流量のばらつきを抑えることができるので、定量充填をより確実なものとすることができる。
【0064】
特に、本実施形態のように可撓性チューブ6の復元部材21を設けることにより、押さえ部材13によって押圧されて潰れてしまった後の復元が難しかった大口径の可撓性チューブ6を安心して利用できるようになる。つまり、大口径の可撓性チューブ6も、復元部材21によって形状復元が補助されることで流量が安定する。
【0065】
なお、本実施形態の復元ローラ21Aは、可撓性チューブ6の断面形状に倣った丸溝23が円環状に形成されており、丸溝23の内壁が可撓性チューブ6の側部に当接してガイドする構成としたが、復元部材21の構成はこれに限るものではなく、例えば、図16および図17に示すような、可撓性チューブ6の側部に当接してガイドする一対のガイド面24を備えた板状部材である復元板21Bであってもよい。
【0066】
<第4実施形態>
図18および図19に示す本実施形態の液体充填装置は、充填後の充填量検出手段による検出結果が液体Lの供給不足を示すときには不足分の液体Lを追加充填し、充填後の充填量検出手段による検出結果が液体Lの過充填を示すときには過分の液体Lを吸引して定量充填を行なう構成を備えている。
【0067】
この実施形態について、前述の第1実施形態と異なる特徴部分について説明すると、本実施形態の液体充填装置は、容器Aに充填された液体L中に充填ノズルの先端を位置させるノズル挿入機構として、充填ノズル2を容器に対し接離可能とされたノズル昇降機構を備えている。なお、前記ノズル挿入機構としては、容器Aを載置するテーブル1を充填ノズル3に対し接離可能とされたテーブル昇降機構であってもよい。これらのノズル挿入機構は、公知の構成とし、本実施形態においては、制御部14により、駆動が制御されるものとする。
【0068】
また、回転子12には、回転子12の回動によって共に可撓性チューブ6を壁部材7との間に挟み、液流路5を閉塞することが可能に、一対の押さえ部材13としての押さえローラ13A,13Bが隣位させて取り付けられている。さらに言えば、本実施形態における一対の押さえローラ13A,13Bは同寸法とされており、回転子12の回転軸11から等距離に設けられた軸15によって回転自在に、隣位させて配設されている。
【0069】
そして、前記したように構成される本発明に係る本実施形態の液体充填装置は、以下のように作用する。
【0070】
本実施形態においては、充填が終了した後、不図示の充填量検出手段による検出結果が液体Lの供給不足を示すときには、不足分の液体Lを追加充填し、逆に、充填量検出手段による検出結果が液体Lの過充填を示すときには、過分の液体Lを吸引して回収するように、制御部14は駆動モータ10Aの駆動を制御する。
【0071】
具体的には、まず、前記一対の押さえローラ13A,13Bのうち、充填ノズル3から離れた位置において可撓性チューブ6に接離する一方の押さえローラ13Aのみを用い、通常の充填作業を行う。すなわち、前記制御部14は、一方の押さえローラ13Aを用い、可撓性チューブ6を壁部材7との間に押圧して液流路5の開閉量を調整し、容器Aに液体Lを供給するように、駆動モータ10Aを正回転で駆動させるように制御し、回転子12を所定量だけ正方向に回動させる。
【0072】
そして、所定の充填が終了したら、作動手段8における制御部14の制御により駆動モータ10Aを逆回転で駆動させ、回転子12を所定量、逆方向へ回動させ、図18(a),図19(a)に示すように、一方の押さえローラ13Aが可撓性チューブ6の液流路5を閉塞させた状態とし、この状態で充填量検出手段により、充填量の過不足を検出する。
【0073】
その検出結果が液体Lの供給不足を示すときには、制御部14は、図18(b)に示すように、作動手段8における制御部14の制御により駆動モータ10Aを正回転で駆動させて、回転子12を所定量、正方向へ回動させ、小流量充填状態とする。そして、供給不足分の充填を完了させたところで、制御部14の制御により駆動モータ10Aを逆回転で駆動させて、回転子12を所定量だけ逆方向へ回動させ、再び、図18(c)に示すような閉塞状態として充填を完了させる。
【0074】
一方、図19(a)のように、容器Aに対する充填量が多く、充填量検出手段の検出結果が液体Lの過充填を示すときには、図19(b)のように、一方の押さえローラ13Aが可撓性チューブ6の液流路5を閉塞させた状態となっている状態で、不図示の充填ノズル昇降機構を駆動させ、充填ノズル3を下降させることによりその先端を容器Aに充填された液体L中に位置させる。
【0075】
この状態で、制御部14は、駆動モータ10Aを逆回転で駆動させ、図19(c)に示すように、充填ノズル3に近い位置において可撓性チューブ6に接離する他方の押さえローラ13Bにより、可撓性チューブ6を壁部材7との間に押圧しつつ、一方の押さえローラ13Aが閉塞している位置から充填ノズル3までの間の液流路5内に、負圧によって容器Aから過分な液体Lを吸い上げ、回収するように、回転子12を逆方向に回転させるように制御する。
【0076】
その後、図19(d)に示すように、前記充填ノズル昇降機構を駆動させ、充填ノズル3を上昇させて、定量充填を完了させる。
【0077】
そして、次の充填時には、一対の押さえローラ13A,13Bがともに可撓性チューブ6を押圧している状態から、制御部14の制御により駆動モータ10Aを正回転で駆動させて、回転子12を所定量だけ正方向に回動させ、一方の押さえローラ13Aのみによる閉塞状態と小流量充填状態とを経て、大流量充填状態とし、所定量の充填を実行する。
【0078】
このように、本実施形態の液体充填装置によれば、充填量検出手段により検出した充填量に基づき液体Lの微量な追加充填と回収とを行うフィードバック制御を実行することで、定量充填をさらに確実なものとすることができる。
【0079】
なお、本実施形態においては、充填量検出手段の検出結果が液体Lの過充填を示すときに、あらためて充填ノズル昇降機構を駆動させ、充填ノズル3を下降させることによりその先端を容器Aに充填された液体L中に位置させるように制御する構成としたが、例えば、常に、充填ノズル3の先端を容器Aの底部付近まで挿入してから充填を開始するように制御される充填装置の場合は、その順に従うものとする。
【0080】
<第5実施形態>
図20に示す本実施形態の液体充填装置は駆動手段10として、前述の実施形態の駆動モータ10Aに代えて、直動式電動アクチュエータ10Bを用いている。
【0081】
この実施形態について、前述の第1実施形態と異なる特徴部分について説明すると、本実施形態の液体充填装置は、押さえローラ13Aが配設された回転子12は、支持体9に対し軸26により正逆回動可能に軸支されるとともに、前記軸26を中心にして押さえローラ13Aと大きく離間する位置に、直動式電動アクチュエータ10Bの駆動により進退移動するシャフト28の先端を連結させる連結部材27が配設されている。連結部材27は回転子12に対し回転軸31により回動自在に接続されている。また、直動式電動アクチュエータ10Bは、シャフト28の先端に連設された連結部材27を回転子12に形成された回転軸31に連結させ、シャフト28の進退移動に伴って回転子12が正逆回動するように、その本体29を支持体9に対して軸30により揺動可能に配設されている。そして、制御部14は、直動式アクチュエータ10Bの駆動を制御する。なお、本実施形態においても、前述までの実施形態に倣って、押さえ部材13の可撓性チューブ6に対する押圧を弱めるときの直動式電動アクチュエータ10Bの進退方向および回転子12の回転方向を「正方向」と概念し、押さえ部材13の可撓性チューブ6に対する押圧を強めるときの前記直動式電動アクチュエータ10Bの進退方向および回転子12の回転方向を「逆方向」と概念して、以下、説明する。
【0082】
前記したように構成される本実施形態の液体充填装置は、制御部14が直動式電動アクチュエータ10Bの駆動を制御し、図20(a)に示すように、シャフト28を延伸させ(逆方向へ移動させ)ると、連結部材27は自らも回転軸27aを中心に回動しつつ、回転子12を逆方向へ押し遣り、回動させるように作用する。そして、回転子12の回動で押さえローラ13Aを可撓性チューブ6の液流路5の下流側から上流側(図面内上方)へ揺動移動させることにより、可撓性チューブ6に対する押さえローラ13Aの当接と押圧を強めることができる。
【0083】
また、制御部14が直動式電動アクチュエータ10Bの駆動を制御し、図20(b)に示すように、シャフト28を短縮させ(正方向へ移動させ)ると、連結部材27は自らも回転軸31を中心に回動しつつ、回転子12を正方向へ引っ張って回動させるように作用する。そして、回転子12の回動で押さえローラ13Aを液流路5の上流側から下流側へ(図面内下方へ)揺動移動させることにより、可撓性チューブ6に対する押さえローラ13Aの押圧を弱めたり、非当接とすることができる。
【0084】
よって、本実施形態の液体充填装置においても、制御部14により駆動手段10としての直動式電動アクチュエータ10Bの駆動を制御することで、回転子12の正逆方向の回動量を調整し、回転子12に設けられた押さえ部材13の可撓性チューブ6に対する押圧状態を変化させることにより液流路5内を流れる液体の流量を調整し、前述の各実施形態と同様の効果を得ることができる。
【0085】
本発明は、前述した実施の形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【0086】
例えば、本発明の液体充填装置における壁部材7は、図21に示すように、可撓性チューブ6の当接面に押さえ部材13の回動軌跡に沿った断面円弧状の湾曲面領域7Aを形成し、その湾曲面領域7Aと押さえ部材13との間に可撓性チューブ6を挟圧するようにしてもい。このような構成とすることで、液流路5を広い接触面で閉塞可能となり、シール効果をより向上させることができる。また、このように壁部材7を形成すると、可撓性チューブ6を押圧したままの状態で押さえ部材13が回転子12の回動に合わせて正逆方向へ移動する際のストロークが大きくなるので(図21(a)乃至図21(c)参照)、前述したような、充填ノズル3の先端の液滴や過分な液体Lの吸い上げ量や、不足分の液体の追加充填量をより多くすることが可能となる。
【0087】
このような壁部材7の構成は、図2、図7、あるいは図20に示す実施形態のように、回転子12に1つの押さえローラ13Aのみが配設されている場合や、回転子12自体を押さえ部材13として兼用する場合のみならず、図19に示す実施形態のように押さえ部材13として一対の押さえローラ13A、13Bを用いる場合等にも適用可能である。
【0088】
また、回転子12の回動に合わせて押さえ部材13が可撓性チューブ6を押圧したままの状態で正逆方向へ移動する際のストロークを大きく確保するために、壁部材7の少なくとも可撓性チューブ6の当接面を弾性部材で形成し、その可撓性チューブ6の押圧の程度により該当接面が凹状に弾性変形するように構成することも可能である。
【符号の説明】
【0089】
1 テーブル
2 タンク
3 充填ノズル
4 配管
5 液流路
6 可撓性チューブ
7 壁部材
8 作動手段
9 支持体
10 駆動手段
10A 駆動モータ
10B 直動式電動アクチュエータ
11 回転軸
12 回転子
13 押さえ部材
13A 押さえローラ
13B 押さえローラ
13C 挟圧部材
14 制御部
15 軸
16 押圧面
21 復元部材
21A 復元ローラ
21B 復元板
22 軸
23 丸溝
24 ガイド面
25 板状部材
26 軸
27 連結部材
28 シャフト
29 本体
30 軸
31 回転軸
A 容器
L 液体
【特許請求の範囲】
【請求項1】
充填する液体を貯留するタンクと、容器に前記液体を注入する充填ノズルと、前記タンクと前記充填ノズルとの間に配設され、一定区間が可撓性チューブにより構成された液流路と、前記液流路の開閉操作を行う作動手段と、前記容器に対する液体の充填量を検出する充填量検出手段と、前記充填量検出手段の検出結果に基づいて前記作動手段の駆動を制御する制御部と、を備える液体充填装置であって、
前記作動手段は、支持体に配設された駆動手段と、前記駆動手段の駆動により正逆回動可能とされた回転子と、前記回転子の回動により前記可撓性チューブを押圧し、前記液流路の開閉量を調整可能とされた押さえ部材を備え、
前記制御部は、前記駆動手段の駆動を制御し、前記回転子の回動量を調整して前記液流路の開閉操作を行なうことを特徴とする液体充填装置。
【請求項2】
容器に充填された液体中に充填ノズルの先端を位置させるノズル挿入機構を備え、
前記回転子には、該回転子の回動により可撓性チューブを押圧して前記液流路を閉塞することが可能な一対の押さえ部材が配設されており、
前記制御部は、
前記充填量検出手段の検出結果により供給不足が検出された場合には、
前記一対の押さえ部材のうち、前記充填ノズルから離れた位置において前記可撓性チューブに接離する一方の押さえ部材により前記可撓性チューブを押圧して前記液流路の開閉量を調整し、前記容器に不足分の液体を追加充填するように前記駆動手段の駆動を制御し、
前記充填量検出手段の検出結果により過充填が検出された場合には、
前記一方の押さえ部材により液流路を閉塞した状態で、前記ノズル挿入機構を駆動させて前記容器に充填された液体中に充填ノズルの先端を位置させ、前記一対の押さえ部材のうちの前記充填ノズルに近い位置において前記可撓性チューブに接離する他方の押さえ部材により、前記可撓性チューブを押圧して、前記一方の押さえ部材が閉塞している位置から充填ノズルまでの間の液流路内に前記容器から所定量の液体を負圧によって回収するように、前記駆動手段の駆動を制御することを特徴とする請求項1に記載の液体充填装置。
【請求項3】
前記回転子には、可撓性チューブに対し、前記押さえ部材によって押圧されたときに拡幅となる方向から当接し、その断面形状を押圧される前の状態に復元させる復元部材が配設されており、
前記制御部は、押さえ部材の可撓性チューブに対する押さえ部材の当接を解除するときに、押さえ部材と入れ変わりに復元部材が可撓性チューブに係合するように前記回転子を回動させるように前記駆動手段の駆動を制御することを特徴とする請求項1または請求項2に記載の液体充填装置。
【請求項4】
充填ノズルの先端から露出する液滴の有無を検出可能なノズル先端液検知手段を備え、
前記制御部は、前記充填ノズル先端液検知手段により充填ノズルの先端に液滴が検知されたときに、可撓性チューブを押圧して液流路を閉塞させている押さえ部材により引き続き可撓性チューブを押圧させて液流路を閉塞させつつ、可撓性チューブの押圧位置を液流路の上流側へ移動するように前記回転子を回動させ、ノズル先端に残存する液滴を液流路内へ吸い上げるように前記駆動手段の駆動を制御することを特徴とする請求項1乃至請求項3のいずれか1項に記載の液体充填装置。
【請求項5】
充填する液体を貯留するタンクと充填ノズルとの間に配設された液流路の一定区間に該液流路を構成するように配設された可撓性チューブを押圧し、前記液流路内を流れる液体の流量を調整しつつ、定量充填を行なう液体充填方法であって、
駆動手段の駆動を制御して回転子の正逆方向の回動量を調整し、前記回転子に設けられた押さえ部材の可撓性チューブに対する押圧状態を変化させることにより前記液流路内を流れる液体の流量を調整することを特徴とする液体充填方法。
【請求項6】
液体充填後の前記押さえ部材が可撓性チューブを押圧してその液流路を閉塞している状態において、この閉塞状態を維持しつつ該押さえ部材の該可撓性チューブに押圧している位置を液流路の上流側へ移動させ、負圧を利用して過分な液体を該押さえ部材の該可撓性チューブに押圧している位置と前記充填ノズルとの間の液流路内に吸い上げることを特徴とする請求項5に記載の液体充填方法。
【請求項1】
充填する液体を貯留するタンクと、容器に前記液体を注入する充填ノズルと、前記タンクと前記充填ノズルとの間に配設され、一定区間が可撓性チューブにより構成された液流路と、前記液流路の開閉操作を行う作動手段と、前記容器に対する液体の充填量を検出する充填量検出手段と、前記充填量検出手段の検出結果に基づいて前記作動手段の駆動を制御する制御部と、を備える液体充填装置であって、
前記作動手段は、支持体に配設された駆動手段と、前記駆動手段の駆動により正逆回動可能とされた回転子と、前記回転子の回動により前記可撓性チューブを押圧し、前記液流路の開閉量を調整可能とされた押さえ部材を備え、
前記制御部は、前記駆動手段の駆動を制御し、前記回転子の回動量を調整して前記液流路の開閉操作を行なうことを特徴とする液体充填装置。
【請求項2】
容器に充填された液体中に充填ノズルの先端を位置させるノズル挿入機構を備え、
前記回転子には、該回転子の回動により可撓性チューブを押圧して前記液流路を閉塞することが可能な一対の押さえ部材が配設されており、
前記制御部は、
前記充填量検出手段の検出結果により供給不足が検出された場合には、
前記一対の押さえ部材のうち、前記充填ノズルから離れた位置において前記可撓性チューブに接離する一方の押さえ部材により前記可撓性チューブを押圧して前記液流路の開閉量を調整し、前記容器に不足分の液体を追加充填するように前記駆動手段の駆動を制御し、
前記充填量検出手段の検出結果により過充填が検出された場合には、
前記一方の押さえ部材により液流路を閉塞した状態で、前記ノズル挿入機構を駆動させて前記容器に充填された液体中に充填ノズルの先端を位置させ、前記一対の押さえ部材のうちの前記充填ノズルに近い位置において前記可撓性チューブに接離する他方の押さえ部材により、前記可撓性チューブを押圧して、前記一方の押さえ部材が閉塞している位置から充填ノズルまでの間の液流路内に前記容器から所定量の液体を負圧によって回収するように、前記駆動手段の駆動を制御することを特徴とする請求項1に記載の液体充填装置。
【請求項3】
前記回転子には、可撓性チューブに対し、前記押さえ部材によって押圧されたときに拡幅となる方向から当接し、その断面形状を押圧される前の状態に復元させる復元部材が配設されており、
前記制御部は、押さえ部材の可撓性チューブに対する押さえ部材の当接を解除するときに、押さえ部材と入れ変わりに復元部材が可撓性チューブに係合するように前記回転子を回動させるように前記駆動手段の駆動を制御することを特徴とする請求項1または請求項2に記載の液体充填装置。
【請求項4】
充填ノズルの先端から露出する液滴の有無を検出可能なノズル先端液検知手段を備え、
前記制御部は、前記充填ノズル先端液検知手段により充填ノズルの先端に液滴が検知されたときに、可撓性チューブを押圧して液流路を閉塞させている押さえ部材により引き続き可撓性チューブを押圧させて液流路を閉塞させつつ、可撓性チューブの押圧位置を液流路の上流側へ移動するように前記回転子を回動させ、ノズル先端に残存する液滴を液流路内へ吸い上げるように前記駆動手段の駆動を制御することを特徴とする請求項1乃至請求項3のいずれか1項に記載の液体充填装置。
【請求項5】
充填する液体を貯留するタンクと充填ノズルとの間に配設された液流路の一定区間に該液流路を構成するように配設された可撓性チューブを押圧し、前記液流路内を流れる液体の流量を調整しつつ、定量充填を行なう液体充填方法であって、
駆動手段の駆動を制御して回転子の正逆方向の回動量を調整し、前記回転子に設けられた押さえ部材の可撓性チューブに対する押圧状態を変化させることにより前記液流路内を流れる液体の流量を調整することを特徴とする液体充填方法。
【請求項6】
液体充填後の前記押さえ部材が可撓性チューブを押圧してその液流路を閉塞している状態において、この閉塞状態を維持しつつ該押さえ部材の該可撓性チューブに押圧している位置を液流路の上流側へ移動させ、負圧を利用して過分な液体を該押さえ部材の該可撓性チューブに押圧している位置と前記充填ノズルとの間の液流路内に吸い上げることを特徴とする請求項5に記載の液体充填方法。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】

【図15】
【図16】
【図17】
【図18】
【図19】
【図20】

【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2013−10539(P2013−10539A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−144482(P2011−144482)
【出願日】平成23年6月29日(2011.6.29)
【出願人】(390029090)靜甲株式会社 (30)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月29日(2011.6.29)
【出願人】(390029090)靜甲株式会社 (30)
【Fターム(参考)】
[ Back to top ]