
液体処理システム及び液体処理方法
【課題】簡素な構成で精度の高い処理をすることができる液体処理システム1及び液体処理方法を提供すること。
【解決手段】液性の生物学的材料を処理する液体処理システム1であって、所定の作業空間内に設定された軸線回りに回動自在に設けられた胴部41と、胴部41に設けられ少なくとも3自由度以上の自由度を有する第一腕部45Lと、胴部41に設けられ少なくとも3自由度以上の自由度を有する第二腕部45Rと、胴部41、第一腕部45L、及び第二腕部45Rをそれぞれ動作させる駆動手段75と、作業空間内且つ第一腕部45Lと第二腕部45Rとの少なくともいずれかの可動範囲内に配置された理化学機器10と、を備え、理化学機器10の位置及び形状に基づいたティーチングプレイバックにより駆動手段75を動作させて理化学機器10を用いた生物学的材料の処理をすることを特徴とする。
【解決手段】液性の生物学的材料を処理する液体処理システム1であって、所定の作業空間内に設定された軸線回りに回動自在に設けられた胴部41と、胴部41に設けられ少なくとも3自由度以上の自由度を有する第一腕部45Lと、胴部41に設けられ少なくとも3自由度以上の自由度を有する第二腕部45Rと、胴部41、第一腕部45L、及び第二腕部45Rをそれぞれ動作させる駆動手段75と、作業空間内且つ第一腕部45Lと第二腕部45Rとの少なくともいずれかの可動範囲内に配置された理化学機器10と、を備え、理化学機器10の位置及び形状に基づいたティーチングプレイバックにより駆動手段75を動作させて理化学機器10を用いた生物学的材料の処理をすることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液性の生物学的材料を処理する液体処理システム及びそのシステムを用いた液体処理方法に関する。
【背景技術】
【0002】
従来、生物学や医学の分野では、生物に由来する材料を検体とした分析が行なわれている。生物に由来する材料は、血液や尿などの生物材料や、培養細胞の懸濁液など、液性の材料であることが多い。このような液性の材料は、液体を精度よく定量することができる機器(たとえばマイクロピペッター)を用いて処理される。
【0003】
近年、多数の検体を迅速に分析したり、人体に有害な検体を分析したりする目的で、分析機器等を操作するロボットを備えたシステムが知られている。たとえば特許文献1には、インキュベーターや遠心分離機など培養操作に必要な機器類と、これらの機器類を操作するロボットとを備えた自動細胞培養装置が記載されている。特許文献1に記載の自動細胞培養装置は、人手に代えてロボットに培養操作をさせることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−54690号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の自動培養装置では、ロボットによって好適に操作可能な専用の機器類がロボットと協動するようになっているので、手作業による従来の分析と同一の機器構成及び手順を再現することが困難である。さらに、ロボット専用の機器類及びロボット専用の消耗品を要するので、装置構成が大掛かりとなり且つランニングコストが高くなるおそれがある。
【0006】
本発明は、上述した事情に鑑みてなされたものであって、その目的は、簡素な構成で精度の高い処理をすることができる液体処理システム及び液体処理方法を提供することである。
【課題を解決するための手段】
【0007】
上記課題を解決するために、この発明は以下の手段を提案している。
本発明の液体処理システムは、液性の生物学的材料を処理する液体処理システムであって、所定の作業空間内に設定された軸線回りに回動自在に設けられた胴部と、前記胴部に設けられ少なくとも3自由度以上の自由度を有する第一腕部と、前記胴部に設けられ少なくとも3自由度以上の自由度を有する第二腕部と、前記胴部、前記第一腕部、及び前記第二腕部をそれぞれ動作させる駆動手段と、前記作業空間内且つ前記第一腕部と前記第二腕部との少なくともいずれかの可動範囲内に配置された理化学機器と、を備え、前記理化学機器の位置及び形状に基づいたティーチングプレイバックにより前記駆動手段を動作させて前記理化学機器を用いた前記生物学的材料の処理をすることを特徴とする液体処理システムである。
【0008】
また、前記第一腕部は前記理化学機器を取り扱うための第一ロボットハンドを備え、前記第二腕部は前記理化学機器を取り扱うための第二ロボットハンドを備え、前記理化学機器であって互いに異なる処理を行う複数の理化学機器が、前記第一ロボットハンドと前記第二ロボットハンドとの少なくともいずれかの可動範囲内に配置されていることが好ましい。
【0009】
また、前記複数の理化学機器であって前記生物学的材料の処理のうち所定の手順に従って実行される処理に用いられる全ての理化学機器が前記第一ロボットハンドと前記第二ロボットハンドとの双方の可動範囲内に配置されていることが好ましい。
【0010】
また、本発明の液体処理システムは、前記第一ロボットハンドと前記第二ロボットハンドとの相対位置を検出し、前記第一腕部と前記第二腕部とを協調動作させることが好ましい。
【0011】
また、前記第一ロボットハンドと前記第二ロボットハンドとは同形であることが好ましい。
【0012】
また、本発明の液体処理システムは、前記液性の生物学的材料として、付着性の培養細胞が懸濁された細胞懸濁液を調製するシステムであり、前記理化学機器は、前記培養細胞が培養される培養面を底部に有し上部が開口された培養容器と、前記培養細胞を前記培養面からかきとるブレードが設けられたセルスクレーパーと、を含み、前記第一ロボットハンドは、前記開口が上に向けられた状態で前記培養容器を把持し、前記第二ロボットハンドは、前記セルスクレーパーを把持し、前記第一腕部及び前記第二腕部は、前記培養面において前記培養面の中央から離間した一箇所に、前記中央と前記一箇所とを結ぶ直線と交差する方向に前記ブレードの長手方向が向くように、前記ブレードを接触させ、前記一箇所において前記培養面に接触された前記ブレードを、前記一箇所から前記中央を通って反対側まで前記培養面に沿って移動させ、前記反対側まで移動された前記ブレードを、前記ブレードの長手方向の延長線上であって前記ブレードの長手方向の両端よりも外側の一点を回転軸として、前記両端のうち前記一点から遠い側の端が前記培養面の外縁に位置するまで、前記培養面と前記ブレードとが接触された状態で回転させ、前記一点から遠い側の前記ブレードの端を前記外縁に沿わせた状態で、前記培養面に前記ブレードが接触された状態で前記ブレードを前記培養面に対して相対移動させることを特徴とし、さらに、前記第一腕部は、前記ブレードを前記培養面上で移動させているときには、前記培養容器内にある細胞懸濁液が前記培養容器の一部に集積されるように前記培養容器を傾斜させ、前記培養面から剥離された前記培養細胞を含む細胞懸濁液が前記培養容器に対する前記ブレードの移動方向の前方に位置するように、前記第二腕部と協調動作されることが好ましい。
【0013】
また、前記第一ロボットハンドと前記第二ロボットハンドとのうち少なくとも前記第二ロボットハンドは、開閉動作可能な一対のビットを有し、前記一対のビットは、前記培養容器の深さ方向における前記培養容器の外寸以上の長さを有する棒状の把持部材を4つ備え、前記把持部材は、前記一対のビットの各々に、互いに平行に2つずつ配置されており、各前記把持部材の先端は、同一の仮想平面内に存する、ことを特徴とし、さらに、前記第二ロボットハンドは、前記培養容器の開口側から底部側へ向かって前記把持部材を移動させて前記培養容器の外周を囲むように前記把持部材を配置し、前記一対のビットを閉じることにより、前記把持部材の先端によって前記培養容器の底部の外周を保持し、且つ前記先端よりも基端側の前記把持部材の外周面によって前記培養容器の外周面を保持することが好ましい。
【0014】
また、前記理化学機器は、容器本体部、及び可撓性のヒンジによって前記容器本体部と連結された押蓋式の蓋部、を有するマイクロチューブと、前記マイクロチューブの底部が差し込まれる孔を有して前記マイクロチューブを保持するチューブラックと、を含み、前記第一ロボットハンドと前記第二ロボットハンドとの少なくとも何れかは、前記蓋部が挿入される第一凹部を有するビットを備え、前記第一腕部と前記第二腕部とのうち前記ビットを備える少なくとも一方は、前記蓋部によって閉じられた状態で前記チューブラックに保持された前記マイクロチューブの前記蓋部のうち前記ヒンジの反対側に位置する部分を前記第一凹部に係止させて、前記ビットにおける前記第一凹部以外の一部を前記ヒンジに当接させ、前記ヒンジを支点として前記蓋部を前記容器本体部から引き抜き、または、前記容器本体部に対して前記蓋部が外れた状態で前記チューブラックに保持された前記マイクロチューブの前記蓋部を前記ビットによって押圧して前記ヒンジを湾曲させ、さらに前記蓋部の一部を前記ビットによって押圧して前記容器本体部内に押し込むことが好ましい。
【0015】
また、前記ビットは、前記第一凹部を有する第一ビットと、前記第一凹部と同形の第二凹部を有し前記第一ビットに対して相対移動される第二ビットと、を有し、前記第一ビットと前記第二ビットとは、前記第一凹部と前記第二凹部とが各々の開口が正対するように対向配置され、前記第一ビットと前記第二ビットとは、互いに離間する2点で前記マイクロチューブの容器本体部の外周面を支持する突起部をそれぞれ備え、前記第一凹部及び前記第二凹部は、前記マイクロチューブの蓋部及び前記容器本体部の開口端に形成されたフランジ部が、前記蓋部の厚さ方向に所定のクリアランスが残る状態で挿入されることを特徴とし、前記ビットは、前記マイクロチューブに振動を与えて前記マイクロチューブ内の液体を攪拌する処理において、前記突起部と前記外周面との間に隙間を有する状態で前記マイクロチューブを保持することが好ましい。
【0016】
また、本発明の液体処理システムは、前記第一腕部及び前記第二腕部が少なくとも6自由度以上の自由度を有することが好ましい。
【0017】
また、本発明の液体処理システムは、前記第一腕部及び前記第二腕部を含め前記胴部には2以上の腕部が設けられていることが好ましい。
【0018】
また、前記理化学機器には、電力の供給を受けて動作する汎用理化学機器と、単回使用の汎用容器と、前記汎用容器を保持するラックとの少なくとも何れかが含まれていてもよい。
【0019】
本発明の液体処理方法は、本発明の液体処理システムを用いることを特徴とする液体処理方法である。
【発明の効果】
【0020】
本発明の液体処理システム及び液体処理方法によれば、簡素な構成で精度の高い処理をすることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態の液体処理システムを示す平面図である。
【図2】同液体処理システムにおけるロボットの拡大図である。
【図3】同ロボットに設けられたロボットハンドの斜視図である。
【図4】同ロボットに設けられたロボットハンドの斜視図である。
【図5】同ロボットハンドの正面図である。
【図6】同ロボットハンドの平面図である。
【図7】同ロボットハンドの下面図である。
【図8】同ロボットハンドの左側面図である。
【図9】同ロボットハンドの右側面図である。
【図10】同ロボットハンドの背面図である。
【図11】同ロボットハンドの一部の構成を示す拡大図である。
【図12】本発明の液体処理方法を示すフローチャートである。
【図13】同液体処理システムの使用時の動作を説明するための図である。
【図14】同液体処理システムの使用時の動作を説明するための図である。
【図15】同液体処理システムの使用時の動作を説明するための図である。
【図16】同液体処理システムの使用時の動作を説明するための図である。
【図17】同液体処理システムの使用時の動作を説明するための図である。
【図18】同液体処理システムの使用時の動作を説明するための図である。
【図19】同液体処理システムの使用時の動作を説明するための図である。
【図20】同液体処理システムの使用時の動作を説明するための図である。
【図21】同液体処理システムの使用時の動作を説明するための図である。
【図22】同液体処理システムの使用時の動作を説明するための図である。
【図23】同液体処理システムの使用時の動作を説明するための図である。
【図24】同液体処理システムの使用時の動作を説明するための図である。
【発明を実施するための形態】
【0022】
本発明の一実施形態の液体処理システムについて説明する。
本実施形態の液体処理システムは、液性の生物学的材料を処理するシステムである。
本明細書において、液性の生物学的材料とは、生体を構成する物質を含有する液体、細胞や組織などの懸濁液、尿や汗などの代謝産物や分泌物等、を含み、流動性を有する材料を指す。
【0023】
本実施形態では、液体処理システムの例として、付着性の培養細胞が懸濁された細胞懸濁液を調製し、細胞懸濁液を材料として分析用の試料を調製するシステムについて説明する。
【0024】
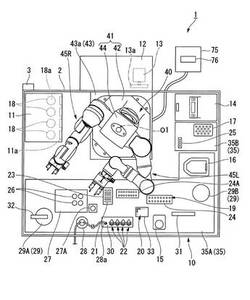
まず、液体処理システムの構成について、図1ないし図10を参照して説明する。図1は、本実施形態の液体処理システムを示す平面図である。図2は、液体処理システムにおけるロボットの拡大図である。図3及び図4は、ロボットに設けられたロボットハンドの斜視図である。図5ないし図10は、ロボットハンドの六面図であり、順に、正面図、平面図、下面図、左側面図、右側面図、背面図である。図11は、ロボットハンドの一部の拡大図である。
【0025】
図1に示すように、液体処理システム1は、所定の作業空間を規定する枠体2と、枠体2内に配置された理化学機器10及び作業台35と、枠体2内に配置され第一腕部45Lと第二腕部45Rとを有するロボット40とを備える。
【0026】
枠体2は、作業空間を直方体状の空間として仕切り、ロボット40の動作可能範囲を規定し、且つロボット40と人とが接触する危険性を下げる目的で設けられている。
枠体2には、作業空間の内外の境界面に検出領域を有する光学センサ3が取り付けられている。光学センサ3は、枠体2内に物体が進入したり、枠体2内の物体が枠体2外に出たりした場合に、所定の注意喚起信号を発する。なお、液体処理システム1は、所定の注意喚起信号に基づいてシステム全体の動作を停止させるようになっていてもよい。
【0027】
理化学機器10は、生物学分野における実験用機器及び消耗品などを含む。たとえば、電力の供給を受けて動作する汎用理化学機器、単回使用の汎用容器及び器具や、汎用容器を保持するラックなどが本明細書における理化学機器10に含まれる。
具体的には、本実施形態では、液体処理システム1は、電力の供給を受けて動作する理化学機器10として、CO2インキュベータ11、スライド式のドアを有する保冷庫12、ローテータ13、遠心機14、ミキサー15、アルミブロック恒温槽16、及びマイクロチューブ用シェーカー17を備える。
また、単回使用の汎用器具として、培養容器18と、マイクロチューブ19(汎用容器)と、ピペットチップ20と、セルスクレーパー21とを備える。なお、単回使用の汎用器具を洗浄して繰り返し使用することも可能である。
本実施形態では、培養容器18は、付着性の細胞が培養される培養面18aを底部に有し上部が開口された所謂細胞培養ディッシュである。本実施形態では、培養容器18の培養面18aは円形となっている。
【0028】
マイクロチューブ19(図11参照)は、一般的な樹脂製のチューブであって、押蓋式のマイクロチューブである。具体的には、マイクロチューブ19は、容器本体部19aと、可撓性のヒンジ19cによって容器本体部19aと連結された押蓋式の蓋部19bとを有する。また、容器本体部19aの開口部分には、フランジ状に外側へ張り出したフランジ部19dが形成されている。
なお、スクリューキャップ式のマイクロチューブを本実施形態の液体処理システム1用のマイクロチューブ19として採用することもできる。
【0029】
セルスクレーパー21(図21参照)は、培養容器18の培養面18aから培養細胞をかきとるブレード21aと、ロボット40によって把持される柄部21bとを有する。ブレード21aは、可撓性を有する樹脂製であり、培養面18aに押し付けられると僅かに弾性変形して培養面18aに密着する。本実施形態では、後述するかきとり動作において好適に培養面18a上の培養細胞をかきとる目的で、ブレード21aの長さは、培養容器18の培養面18aの直径の1/3以上の長さとなっている。
【0030】
また、本実施形態では、本明細書における理化学機器10の一部として、ロボット40によって使用されるマイクロピペッター22が設けられている(図20参照)。マイクロピペッター22は、公知の構成を有する本体22aと、本体22aの把持部に固定されたアダプタ22bとを有する。アダプタ22bは、後述する一対のビット64によって把持される部材であり、互いに平行に形成された外面が把持されるようになっている。
【0031】
作業台35上には、上記セルスクレーパー21を保持するスタンド23と、マイクロチューブ19の底部が差し込まれる孔を有してマイクロチューブ19を保持するチューブラック24及び作業用のチューブラック24Aと、磁性体ビーズを吸着させるための磁石25と、蓋付き容器26内に貯留される試薬を保管する試薬保管ブロック27と、蓋付き容器26の蓋を載置する載置台27Aと、ミキサー15(たとえばボルテックス(登録商標))と、液体を吸引廃棄する際に液体を貯留させるトラップ28と、使い捨ての器具を廃棄するための廃棄容器29(廃棄容器29A、29B)と、マイクロピペッター22を保持するピペッターラック30と、マイクロピペッター22のプッシュロッドを移動させるために作業台35上に固定された吸引吐出用治具31と、マイクロピペッター22のイジェクトボタンを操作するためのイジェクト用治具32と、マイクロピペッター22に取り付けて使用される単回使用のピペットチップ20が収容されたチップラック33とがそれぞれ位置決めされて設けられている。
【0032】
トラップ28は、図示しないアスピレーター(吸引ポンプ)に接続されており、ロボット40によってアスピレーターの動作が制御される。トラップ28には、液体を吸引するための管路部材28aの一端が接続されており、管路部材28aの他端には、先端が先細に形成された筒状のアスピレーティングチップ(不図示)が取り付けられている。
イジェクト用治具32は、廃棄容器29の開口の上に配置されている。
なお、作業台35上に設けられる上記各構成は、本明細書でいう理化学機器10に含まれる。
【0033】
以上に説明した理化学機器10は、第一腕部45Lと第二腕部45Rとの少なくともいずれかの可動範囲内に配置されている。本実施形態では、これらの理化学機器10は、ロボット40に設けられた後述する第一ロボットハンド60Lと第二ロボットハンド60Rとの双方の可動範囲内に配置されている。理化学機器10は、第一ロボットハンド60Lまたは第二ロボットハンド60Rによって操作される。
【0034】
図1及び図2に示すように、ロボット40は、胴部41と、第一腕部45Lと、第二腕部45Rと、駆動手段75とを備える。
胴部41は、作業空間の基底面43aに固定された固定部42と、固定部42に連結された旋回部44とを備える。本実施形態では、固定部42は、略板状の台座43を介して枠体2に固定されており、台座43の上面が水平な基底面43aとなっている。台座43は、床面に対する基底面43aの傾きを調整可能な複数の脚を有していてもよい。
固定部42と旋回部44とは、作業空間内に設定された軸線(本実施形態では基底面43aに垂直な軸線O1)回りに相対回動自在である。さらに、旋回部44は、駆動手段75から発せられる駆動信号に従って固定部42に対して旋回動作されるようになっている。
【0035】
第一腕部45Lは、胴部41に設けられ6自由度以上の自由度を有する多関節アーム46と、多関節アーム46の先端に設けられたロボットハンド60とを備えている。
【0036】
多関節アーム46は、胴部41側から順に、第一フレーム47、第二フレーム48、第三フレーム49、第四フレーム50、第五フレーム51、及び第六フレーム52を備える。
本実施形態では、多関節アーム46が直線状態である場合の第一フレーム47側を多関節アーム46の基端側と表記し、同状態における第六フレーム52側を多関節アーム46の先端側と表記する。
【0037】
多関節アーム46を構成する各フレームの接続構造については、公知の接続構造を採用することができる。たとえば、国際公開第2007/037131号明細書に開示された多関節マニピュレータを本実施形態の多関節アーム46に適用することができる。各フレームの接続構造の一例を次に示す。
【0038】
第一フレーム47は、胴部41から水平方向へ第一回転軸が延びるフレームであり、胴部41に対して第一回転軸回りに回転する。第二フレーム48は、第一回転軸と直交する第二回転軸回りに第一フレーム47に対して回転するフレームである。第三フレーム49は、第二回転軸と直交する第三回転軸回りに第二フレーム48に対して回転するフレームである。第四フレーム50は、第三回転軸と直交する第四回転軸回りに第三フレーム49に対して回転するフレームである。第五フレーム51は、第四回転軸と直交する第五回転軸回りに第四フレーム50に対して回転するフレームである。第六フレーム52は、第五回転軸と直交する第六回転軸回りに第五フレーム51に対して回転するフレームである。第六フレーム52の先端には、上記ロボットハンド60が、第六回転軸と直交する第七回転軸回りに回転可能に接続されている。
【0039】
本実施形態では、多関節アーム46は、駆動手段75によって、第一回転軸ないし第七回転軸の計7つの回転軸を個別に回転させることができる。すなわち、本実施形態の多関節アーム46は、7自由度を有する。多関節アーム46が6自由度を有していれば3次元空間において多関節アーム46の先端を所望の姿勢に配置することができるが、本実施形態の液体処理システム1は、6自由度に1つの冗長軸を加えた7自由度を有するので、6自由度を有する場合よりも狭い空間内で多関節アーム46の先端を移動させることができる。
【0040】
図2に示すように、本実施形態では、第一腕部45Lと第二腕部45Rとにそれぞれ同形のロボットハンド60(第一ロボットハンド60L、第二ロボットハンド60R)が設けられている。
ロボットハンド60には、第六フレーム52に対するロボットハンド60の回転軸(上記第七回転軸)と直交する方向へ一対のビット64を進退動作させるグリッパ61と、グリッパ61によって把持対象物が把持されたときの反力を検知する把持センサ62と、グリッパ61と一体に第七回転軸回りに回転されるレーザー光源及び光センサを有するレーザーセンサ63と、を備える。
【0041】
グリッパ61は、板状のベース61aを介して第六フレーム52に固定されている。ロボットハンド60は、ベース61aと第六フレーム52との間で着脱可能となっている。なお、本実施形態では、ロボットハンド60を他の構造のロボットハンドに交換して作業をすることは必須ではない。
【0042】
グリッパ61としては、電力の供給を受けて開閉動作を行なう電動グリッパが採用されている。把持センサ62によって反力を検知することにより、グリッパ61は、一対のビット64によって把持対象物を所定の把持力で把持したり、一対のビット64に把持された把持対象物を他の物体に所定の押圧力で押し付けたりすることができる。
【0043】
把持センサ62は、ベース61aに固定されており、図示しない信号線を介してグリッパ61と電気的に接続されている。
【0044】
レーザーセンサ63は、ベース61aに固定されている。レーザーセンサ63は、後述するカラーマーカーを検出したことに基づいて駆動手段75の動作を切り替える目的で設けられている。
【0045】
一対のビット64は、互いに向かい合わされた状態で面対称となる対称形の第一ビット65および第二ビット74を有している。以下では、第一ビット65の構成を中心に説明し、第二ビット74の構成については、対応する部分に対応する符号(添え字「−2」を有する)を必要に応じて付すことで説明を省略する。
【0046】
図3ないし図10に示すように、第一ビット65は、グリッパ61に連結される本体部材66と、本体部材66に固定された把持部材73とを備える。
【0047】
本体部材66は、たとえば金属の板材から切り出された略板状部材であり、グリッパ61に基端が連結され、多関節アーム46の先端側へと突出して設けられている。本体部材66は、グリッパ61によって基端が平行移動され、第二ビット74に対して平行に近接あるいは離間されることにより開閉動作する。
【0048】
本体部材66の基端から先端へ向かう方向における本体部材66の寸法は、把持対象物を好適に把持できる範囲内で短いことが好ましい。これは、本体部材66がコンパクトであるほうが作業空間内における本体部材66の取り回しが容易となるからである。また、本実施形態では、本体部材66を移動させるグリッパ61からの力がかかる基端が本体部材66における力点及び支点となり、把持対象物が把持される先端が作用点となる。このため、本体部材66の基端から先端へ向かう方向における本体部材66の寸法が短い方が、支点と作用点との距離を短くすることができ、本体部材66の先端の位置精度を高めることができる。
【0049】
本体部材66の外面であって第二ビット74側に向けられた面(以下、この面を「内側面67」と称する。)には、基端から先端へ向って、大径把持部68と小径把持部69とがこの順に並べて形成されている。
【0050】
大径把持部68は、一対のビット64の開方向へ向かって内側面67が窪んだ形状を有している。大径把持部68における内側面67の形状は、本体部材66の板厚方向に交線L1が延びる2平面(第一面及68aび第二面68b)を有するように曲がった面形状となっている。
大径把持部68は、円柱形や円筒形の部材を、その部材の中心軸線が上記交線L1と平行となる向きに位置決めして把持するために最適化された形状とされている。すなわち、上記円柱形や円筒形の部材は、外周面に第一面及び第二面が同時に接触するように把持される。このとき、グリッパ61から伝わる把持力によって、上記円柱形や円筒形の部材は、その中心軸線が上記交線L1と平行となるように位置決めして保持される。
【0051】
小径把持部69は、大径把持部68の先端側に形成され一対のビット64の開方向へ向かって内側面67が矩形状に窪んだ矩形凹部70(第一凹部)と、矩形凹部70の先端側に形成された爪部71とを有する。
【0052】
矩形凹部70は、本体部材66の基端から先端に向かう方向における開口寸法が、マイクロチューブ19の蓋部19bの周縁及びフランジ部19dの周縁が自在に挿脱可能となるように僅かにクリアランスを有する寸法とされている。さらに、矩形凹部70の深さは、マイクロチューブ19の蓋部19bの周縁及びフランジ部19dの周縁が矩形凹部70に収容された状態で爪部71の突出端がマイクロチューブ19の容器本体部19aの外周面に接触可能となる深さに設定されている。
【0053】
爪部71は、本体部材66を先端から基端へ向って見たときに中央が矩形状に切り取られた形状を有している。爪部71によって、マイクロチューブ19の蓋部19bの外周面とフランジ部19dの外周面をともに把持することができる。さらに、爪部71によって、マイクロチューブ19の容器本体部19aの外周面を把持することもできる。本体部材66を先端から基端へ向かって見たときの爪部71の突出端は、マイクロチューブ19等の円柱あるいは円筒状の部材を把持する際にこの部材の外周面と当接する突起部72となっている。
なお、爪部71は、矩形状に中央が切り取られた形状であることに代えて、V字状に中央が切り取られた形状であっても構わない。
【0054】
本体部材66の板厚方向から爪部71を見たときに、爪部71における内側面67は、本体部材66の基端から先端へ向う直線(以下「長手軸線X1」と称する。)と平行とされている。爪部71と矩形凹部70との境界部分は、本体部材66の板厚方向から見たときに、一対のビット64の開閉方向に沿う直線(以下、「幅軸線Y1」と称する。)と上記長手軸線X1との双方に交差するように傾斜して形成されている。
【0055】
把持部材73は、培養容器18を把持するために最適化された部材である。把持部材73は、本体部材66の板厚方向の両面のうちの一方(以下、この面を「本体部材66の表面」と称する。)から、本体部材66の板厚方向に延びる棒状部材であり、本体部材66の内側面67よりも一対のビット64の開方向側にオフセットされた位置に設けられている。
把持部材73は、一対のビット64の各々に、互いに平行に2つずつ配置されている。第一ビット65に配置された2つの把持部材73は、本体部材66の板厚方向から見たときに、長手軸線X1と平行な直線上に各把持部材73の中心軸線がともに位置するように配置されている。
【0056】
本体部材66の表面から把持部材73の突出端まで本体部材66の板厚方向に測った寸法は、培養容器18の深さ方向における培養容器18の外寸と等しいか、当該外寸よりもわずかに長い。また、2つの把持部材73の当該寸法は互いに等しい。
【0057】
第二ビット74は、第一ビット65に形成された大径把持部68及び小径把持部69と面対称な形状を有する大径把持部68−2及び小径把持部69−2を有する。また、小径把持部69−2には、第一ビット65の矩形凹部70と面対称に形成された矩形凹部70−2(第二凹部)が設けられている。さらに、第二ビット74は、2つの上記把持部材73を備える。
第一ビット65及び第二ビット74に設けられた計4つの把持部材73は、先端が同一の仮想平面内に存する。
【0058】
図11に示すように、本実施形態では、第一ビット65の矩形凹部70(第一凹部)と第二ビット74の矩形凹部70−2(第二凹部)とのいずれも、蓋部19bによって閉じられた状態のマイクロチューブ19のフランジ部19d及びヒンジ19c部分をともに挿入可能な寸法となっている。
【0059】
図2に示すように、第二腕部45Rは、第一腕部45Lと左右対称に構成され第一腕部45Lと同様の接続構造を有する多関節アーム46と、第一ロボットハンド60Lと同形の第二ロボットハンド60Rとを備える。第二腕部45Rの構成は、第一腕部45Lと左右対称な形状である点以外は第一腕部45Lと同一である。本明細書では、第二腕部45Rの構成要素について、対応する部分に対応する符号(添え字「R」を有する)を必要に応じて付すことで説明を省略する。
第二腕部45Rに設けられたロボットハンド60(第二ロボットハンド60R)は、第一腕部45Lに設けられたロボットハンド60(第一ロボットハンド60L)と同一である。このため、対応する部分に対応する符号(添え字「R」を有する)を必要に応じて付すことで説明を省略する。
【0060】
図1に示す駆動手段75は、胴部41、第一腕部45L、及び第二腕部45Rをそれぞれ動作させるアクチュエータ(不図示)と、アクチュエータに対して所定の駆動信号を出力する制御手段76とを備える。
本実施形態では、アクチュエータとして、サーボ機構を有する電動モータが採用されている。このため、エアシリンダ等の流体圧駆動によるアクチュエータと比較して、位置精度が高く、駆動開始時及び駆動終了時の振動が少ない。
【0061】
制御手段76は、胴部41、第一腕部45L、及び第二腕部45Rの動作手順を入力するためのコントローラを接続することができるようになっており、コントローラを介してロボット40に対してティーチング(教示)により動作手順を記憶させることができる。なお、所謂ダイレクトティーチングによって動作手順を記憶させてもよい。制御手段76は、記憶された動作手順に基づいて各アクチュエータに出力する駆動信号を生成して各アクチュエータを動作させる。すなわち、ロボット40は、理化学機器10の位置及び形状に基づいたティーチングプレイバックにより駆動手段75が各アクチュエータを動作させ、ティーチングによって記憶された動作を再生する。
【0062】
また、制御手段76は、第一腕部45L及び第二腕部45Rに設けられた各アクチュエータのサーボ機構による変位量の情報に基づいて、第一ロボットハンド60Lと第二ロボットハンド60Rとの相対位置を検出し、上述のティーチングに従って、第一ロボットハンド60Lと第二ロボットハンド60Rとを協調動作させることができる。
さらに、制御手段76は、レーザーセンサ63からの所定の出力を受信し、理化学機器10の位置に対応した位置にロボットハンド60を位置決めするようになっている。
【0063】
次に、液体処理システム1を用いて液性の生物学的材料を処理する本実施形態の液体処理方法について、液体処理方法を実施するための液体処理システム1の動作とともに、図12ないし図24を参照して説明する。図12は、本実施形態の液体処理方法を示すフローチャートである。図13ないし図24は、液体処理システム1の使用時の動作を説明するための図である。
【0064】
まず、液体処理システム1が稼働状態にある場合のシステムレイアウトについて説明する。
図1に示すように、液体処理システム1における各理化学機器10は、枠体2の内側あるいは枠体2と隣接した位置に設置される。たとえば、本実施形態では、ローテータ13が内部に配置された保冷庫12のみ枠体2の外側に設置され、他の理化学機器10は枠体2の内側に設置されている。
【0065】
電力によって駆動される理化学機器10はすべて通電可能状態とされている。本実施形態では、電力によって駆動される理化学機器10に対する制御は、すべてロボット40を介して行なわれる。なお、状況によっては液体処理システム1による処理に全く使用されない可能性がある理化学機器10をシステム内に有していても良く、この場合には、使用されない理化学機器10の制御がロボット40によって行なわれる必要がない場合がある。
【0066】
また、本実施形態では、遠心機14には、ローターの重量バランスをとるためのバランスチューブが取り付けられており、バランスチューブには、レーザーセンサ63によって検出されるカラーマーカーが設けられている。
また、ローテータ13には、マイクロチューブ19が取り付けられるチューブ取付部13aにカラーマーカーが設けられている。
【0067】
また、作業台35上に固定されたチューブラック24には、予め複数のマイクロチューブ19がセットされている。本実施形態では、初期状態では、マイクロチューブ19の蓋部19bは閉じられている。なお、マイクロチューブ19の蓋が初期状態では開いているものとしてロボット40に教示すれば、マイクロチューブ19の蓋部19bが開いた状態でマイクロチューブ19がチューブラック24にセットされていてもよい。また、詳細な説明は省略するが、バルク品として供給されるマイクロチューブ19の袋内からマイクロチューブ19を取り出してチューブラック24にセットするまでの動作をロボット40にさせてもよい。
【0068】
さらに、作業台35上に固定された試薬保管ブロック27には、一連の処理に必要となる液性の試薬類が所定の温度で保管されている。試薬保管ブロック27に保管される試薬は、液体処理システム1に適用される処理の種類に応じて適宜選択される。一例を挙げれば、このような試薬類としては、細胞回収液、細胞溶解液、洗浄液、緩衝液などが挙げられる。
【0069】
また、アルミブロック恒温槽16は0℃ないし4℃程度の温度に設定されており、当該温度範囲にて保管される液性の試薬類がセットされている。アルミブロック恒温槽16に保管される試薬類としては、抗体が固定された磁性体ビーズ、溶出液、その他酵素類であり、マイクロチューブ19等に分注されている。
【0070】
次に、培養細胞に含まれる所定のタンパク質を回収して精製する手技を例に、液体処理システム1の動作をステップごとに説明する。以下に例示する手技は、質量分析によりタンパク質の構造等を決定するためにタンパク質が精製された分析用試料を得るために用いられる手技である。
なお、以下の説明では、液体処理システム1による動作が共通若しくは類似するステップについては、詳細がすでに説明されたステップの符号を付すことで重複する説明を省略する。
【0071】
(ステップS1:細胞回収用のマイクロチューブの準備)
ロボット40は、マイクロチューブ19がセットされたチューブラック24まで第一ロボットハンド60Lを移動させる。さらに、蓋部19bが閉じられることで屈曲状態となっているヒンジ19cに一対のビット64の一部が接触する状態でマイクロチューブ19の整列方向に第一ロボットハンド60Lを直線移動させる。これにより、チューブラック24におけるマイクロチューブ19の向きが揃う。
【0072】
ロボット40は、第一ロボットハンド60Lに設けられた一対のビット64をグリッパ61によって開き、第一ロボットハンド60Lの長手軸線X1を鉛直方向に向けた状態で、マイクロチューブ19の側方から一対のビット64をマイクロチューブ19に近づける。一対のビット64に形成された矩形凹部70にマイクロチューブ19の蓋部19bが挿入される位置で、ロボット40は第一ロボットハンド60Lの移動を停止させる。
【0073】
さらに、ロボット40は、グリッパ61によって一対のビット64を閉じる。マイクロチューブ19の容器本体部19aの外周面と一対のビット64の爪部71とが接触すると、接触センサによって反力が検知される。接触センサが反力を検知したら、ロボット40はグリッパ61による一対のビット64の閉動作を停止させる。このとき、ロボット40は、一対のビット64の間にマイクロチューブ19のヒンジ19cが位置するように、蓋部19b及びフランジ部19dが矩形凹部70内に挿入された状態でマイクロチューブ19を把持している。さらに、マイクロチューブ19は、爪部71によって外周面が把持された状態となる。
【0074】
ロボット40は、第一ロボットハンド60Lを上昇させ、チューブラック24からマイクロチューブ19を引き抜く。さらに、ロボット40は、作業用のチューブラック24Aへと第一ロボットハンド60Lを移動させ、マイクロチューブ19をチューブラック24Aに載置する。
【0075】
ロボット40は、グリッパ61により一対のビット64を開動作させ、さらに、グリッパ61を90度回転させ、再び一対のビット64を閉動作させる。このとき、図13に示すように、一対のビット64の長手軸線X1は、垂直状態から僅かに傾斜される。そして、第一ビット65と第二ビット74との一方の先端はヒンジ19cの上部に当接し、蓋部19bにおいてヒンジ19cと反対側の部分は第一ビット65と第二ビット74との他方の矩形凹部(矩形凹部70若しくは矩形凹部70−2)の内部に挿入される。ロボット40は、蓋部19bとヒンジ19cとをそれぞれ前述の通り矩形凹部70に係止させて、ヒンジ19cを回動中心としてロボットハンド60を回動させ、蓋部19bを容器本体部19aから引き抜く。これにより、蓋部19bはヒンジ19cを支点として回動され、マイクロチューブ19の蓋が僅かに開く。
【0076】
さらに、図14に示すように、ロボット40(図2参照)は、開けられた蓋の内面側を一対のビット64によって押圧して、屈曲状態で曲がり癖が付いたヒンジ19cを伸ばし、蓋を完全に開く。蓋が完全に開いている状態とは、容器本体部19aの開口の上部が蓋部19bに覆われていない状態を指す。
【0077】
第一ロボットハンド60Lによってマイクロチューブ19の蓋を開ける動作と平行して、ロボット40は、第二ロボットハンド60Rを、CO2インキュベータ11の前まで移動させる。このとき、ロボット40は、一対のビット64の姿勢を、把持部材73の先端(突出端)が下向きとなる姿勢にする。
CO2インキュベータ11の開口シャッタ11aは、第二ロボットハンド60Rが開口シャッタの前に配置されたときにロボット40から発せられる所定の信号に基づいて開放される。
【0078】
図15に示すように、ロボット40は、第二ロボットハンド60Rのグリッパ61によって一対のビット64を開動作させる。このとき、グリッパ61は、グリッパ61の稼働範囲として設定された最大値まで一対のビット64を開く。また、ロボット40は、4つの把持部材73が培養容器18の外周を囲む位置となるように一対のビット64を配置し、培養容器18が載置されている面に4つの把持部材73の先端が接するまで第二ロボットハンド60Rを下降させる。養容器が載置されている面に4つの把持部材73の先端が接する状態で、ロボット40は、グリッパ61によって一対のビット64を閉動作させる。一対のビット64が閉動作されると、一対のビット64に設けられた4つの把持部材73の先端は、培養容器18の底の外周に接し、培養容器18の底部の外周を保持する。さらに、把持部材73の先端よりも基端側(一対のビット64との取付部側)では、把持部材73の外周面によって培養容器18の外周面が保持される。
【0079】
ロボット40は、第二ロボットハンド60Rの一対のビット64によって培養容器18が把持された状態で、CO2インキュベータ11の開口シャッタ11aを通じて培養容器18を取り出す。CO2インキュベータ11の開口シャッタ11aを通じて培養容器18が取り出されたときには、第一ロボットハンド60Lを用いてマイクロチューブ19の蓋を開ける動作は終了している。
【0080】
図16に示すように、ロボット40は、第一ロボットハンド60Lの一対のビット64に設けられた把持部材73の先端が上側を向くように、第一ロボットハンド60Lの姿勢を制御する。さらに、ロボット40は、第二ロボットハンド60Rによって把持されている培養容器18の大きさよりも僅かに大きく第一ロボットハンド60Lの一対のビット64を開く。
【0081】
続いて、第二ロボットハンド60Rは、第一ロボットハンド60Lに設けられた把持部材73の内側に培養容器18を載置する。第一ロボットハンド60Lは、培養容器18が載置された後、グリッパ61によって一対のビット64を閉動作させ、培養容器18を把持する。これにより、第一ロボットハンド60Lは、培養容器18の開口が上に向けられた状態で培養容器18の底面を支持しつつ培養容器18を把持する。培養容器18の底面が支持されている状態なので、培養容器18の開口を通じて器具等を培養容器18内に挿入するのが容易となる。
【0082】
(ステップS2:培養液の除去)
CO2インキュベータ11内から取り出された培養容器18内には、培養細胞と、培養細胞に栄養を供給するための培養液とが入っている。
ロボット40は、第一ロボットハンド60Lによって培養容器18を把持し、第二ロボットハンド60Rは何も把持していない状態となっている。また、第一ロボット40は、培養容器18の底面を傾斜させ、培養容器18内の培養液を容器の一部に移動させる。
【0083】
ロボット40は、第二ロボットハンド60Rによって、トラップ28から伸びる管路部材28aを把持する。ロボット40は、使い捨てのアスピレーティングチップを管路部材28aの端部に差し込んで、管路部材28aにアスピレーティングチップを取り付ける。続いて、ロボット40は、トラップ28内に負圧を生じさせるために、アスピレーターの駆動を開始させる信号をアスピレーターに出力する。なお、アスピレーターは常時駆動されていても構わない。
【0084】
ロボット40は、第二ロボットハンド60Rを第一ロボットハンド60Lの上まで移動させ、管路部材28aの先端に取り付けられたアスピレーティングチップの先端を、培養容器18内で培養液が貯留されている部分(傾斜された培養容器18の最下端)に差し入れる。
これにより、培養容器18内の培養液は、管路部材28aを通じてトラップ28内へ廃棄される。
【0085】
ロボット40は、所定時間だけアスピレーティングチップの先端を培養容器18の最下端に差し入れて保持し、所定時間の経過後に、アスピレーティングチップを培養容器18から引き抜く。さらに、ロボット40は、アスピレーティングチップの先端が上に向くように第二ロボットハンド60Rを回動させ、管路部材28a内に残っている培養液をトラップ28へと移動させる。その後、ロボット40は、第二ロボットハンド60Rによって把持されている管路部材28aを元の位置に戻す。
【0086】
(ステップS3:細胞回収液の添加)
ロボット40は、培養液が除去された培養容器18を第一ロボットハンド60Lによって把持し、第二ロボットハンド60Rは何も把持していない状態となっている。また、第一ロボット40は、培養容器18の底面を水平状態とする。
【0087】
図1及び図17に示すように、ロボット40は、第二ロボットハンド60Rを、試薬保管ブロック27まで移動させる。さらに、ロボット40は、第二ロボットハンド60Rの一対のビット64の長手軸線X1が鉛直方向に向くように第二ロボットハンド60Rの姿勢を制御する。さらに、細胞回収液が収容された蓋付き容器26の蓋の外周面を、第二ロボットハンド60Rの一対のビット64の爪部71によって把持する。さらに、ロボット40は、第二ロボットハンド60Rを載置台27Aまで移動させ、蓋付き容器26の蓋を載置台27Aに載せる。
【0088】
続いて、ロボット40は、第二ロボットハンド60Rによって、マイクロピペッター22のアダプタ22bを把持し、ピペッターラック30からマイクロピペッター22を取り外す。さらに、ピペットチップ20をマイクロピペッター22に取り付ける。
【0089】
続いて、図18に示すように、ロボット40は、蓋が外された蓋付き容器26の開口の上部まで第二ロボットハンド60Rを移動させる。このとき、ロボット40は、ピペットチップ20の先端が下向きとなるようにマイクロピペッター22を立てた状態で、第二ロボットハンド60Rによりマイクロピペッター22を保持している。
【0090】
ピペットチップ20が蓋付き容器26の開口の上部まで移動されたら、培養容器18を保持した状態の第一ロボットハンド60Lを第二ロボットハンド60Rの上方へ移動させる。その後、第一ロボットハンド60Lを下降させ、マイクロピペッター22のプッシュロッドを第一ロボットハンド60Lの外面の一部によって押圧する。
【0091】
本実施形態では、手作業で液体の定量操作をするためのマイクロピペッター22と同一のマイクロピペッター22が採用されており、プッシュロッドには、軽い動作で進退動作可能な第一領域と、第一領域よりも動作に力を要する第二領域とが設定されている。ロボット40は、プッシュロッドを、第一領域と第二領域との境界(第一ストップ位置)まで押圧する。
【0092】
その後、ロボット40は、第一ロボットハンド60Lと第二ロボットハンド60Rとの相対位置が固定された状態を維持しつつ、第一ロボットハンド60L及び第二ロボットハンド60Rを下降させる。ピペットチップ20の先端が細胞回収液の液面より僅かに下となる位置で、ロボット40は第一ロボットハンド60L及び第二ロボットハンド60Rを停止させ、その後、第一ロボットハンド60Lのみを上昇させる。これにより、プッシュロッドが上昇し、ピペットチップ20内に細胞回収液が吸引される。
【0093】
ピペットチップ20内に細胞回収液が吸引された後、図19に示すように、ロボット40は、第一ロボットハンド60Lと第二ロボットハンド60Rとを、第二ロボットハンド60Rが第一ロボットハンド60Lの上方になるように相対移動させる。このとき、ピペットは立てられた向きで保持され、ピペットチップ20の先端が培養容器18の培養面18aに向けられた状態とされる。
【0094】
ロボット40は、第一ロボットハンド60Lと第二ロボットハンド60Rとの相対位置が固定された状態で、第一ロボットハンド60L及び第二ロボットハンド60Rを、吸引吐出用治具31の下方へ移動させる。さらに、ロボット40は、第一ロボットハンド60L及び第二ロボットハンド60Rを上昇させてプッシュロッドを吸引吐出用治具31に接触させ、プッシュロッドを押してピペットチップ20内の細胞回収液を培養容器18内に吐出させる。第一ロボットハンド60Lと第二ロボットハンド60Rとの相対位置が固定された状態で細胞回収液を吐出させるので、細胞回収液を吐出している間、培養容器18の培養面18aとピペットチップ20の先端との距離は一定に保たれている。
【0095】
細胞回収液が培養容器18内に吐出されたら、図20に示すように第二ロボットハンド60Rはイジェクト用治具32の下へと移動され、第二ロボットハンド60Rが移動されることによって、マイクロピペッター22のイジェクトボタン22cがイジェクト用治具32に押される。これにより、マイクロピペッター22からピペットチップ20が外れ、廃棄容器29(図1参照)内に落下する。
【0096】
さらに、ロボット40は、第二ロボットハンド60Rによってピペットチップ20を外している動作と平行して、第一ロボットハンド60Lを水平面内で旋回動作させ、培養容器18内に吐出された細胞回収液を培養面18aに広げる。なお、ロボット40は、細胞回収液を培養面18aに広げるステップにおいて、培養面18aを僅かに傾斜させるように第一ロボットハンド60Lを傾斜させつつ旋回させてもよい。
【0097】
ピペットチップ20を外すステップが終了した後、第二ロボットハンド60Rは、マイクロピペッター22を元の位置に戻す。
【0098】
(ステップS4:細胞のかきとり)
ロボット40は、細胞回収液が入っている培養容器18を第一ロボットハンド60Lによって把持し、第二ロボットハンド60Rは何も把持していない状態となっている。また、第一ロボットハンド60Lは、培養面18a上の細胞が乾燥するのを防止するために、培養容器18の底面を水平状態とする。
【0099】
図21に示すように、第二ロボットハンド60Rは、スタンド23に保持されたセルスクレーパー21を把持し、第一ロボットハンド60Lに把持された培養容器18の培養面18aにブレード21aを接触させる。このとき、第一ロボットハンド60Lは、培養容器18の培養面18aを水平状態から一方向に傾ける。
【0100】
細胞をかきとる動作を開始するときの第一腕部45L及び第二腕部45Rの初期位置は、培養面18aの中央を回転中心として培養容器18を回転させることができる可動範囲が残る姿勢で第一腕部45Lが培養容器18を保持し、培養面18aの中央部を回転中心としてセルスクレーパー21を回転させることができる可動範囲が残る姿勢で第二腕部45Rがセルスクレーパー21を保持する位置関係となる。さらに、第一腕部45L及び第二腕部45Rの初期位置は、培養面18aの中央部を回転中心として培養容器18に対してセルスクレーパー21が360度相対回転することができるように設定される。
【0101】
細胞のかきとり動作の詳細について図22を参照して説明する。
図22に示すように、第一腕部45L及び第二腕部45R(図2参照)は、まず、培養面18aにおいて培養面18aの中央から離間した一箇所P1にブレード21aを接触させる。このときのブレード21aの向きは、培養面18aの中央と前記一箇所とを結ぶ直線と交差する方向にブレード21aの長手方向が向く向きとなっている。ブレード21aは培養面18aに押し付けられ、ブレード21aは僅かに弾性変形して培養面18aと密着される。
【0102】
続いて、前記一箇所において培養面18aに接触されたブレード21aを、前記一箇所から培養面18aの中央を通って反対側まで培養面18aに沿って移動させる。これにより、培養面18aの中央部分に付着している細胞がブレード21aによってかきとられる。また、培養面18aの中央部分の細胞をかきとるステップでは、傾けられた培養容器18の上側から下側へ向ってブレード21aを移動させて細胞をかきとる。これにより、ブレード21aによってかきとられた細胞は、細胞回収液とともに培養容器18の下端に集められる。
【0103】
さらに、培養面18aの中央部分に付着している細胞がかきとられた状態で、第一腕部45L及び第二腕部45Rは、ブレード21aの長手方向の延長線上であってブレード21aの長手方向の両端のうちの一方若しくは両端よりも外側の一点(符号P2で示す)を回転軸として、ブレード21aの両端のうち回転軸となる一点から遠い側の端P3が培養面18aの外縁に位置するまでブレード21aを回転させる。これにより、培養面18aに沿って移動されるブレード21aの進行方向がブレード21a上の何れの位置でも反転することなく、ブレード21aが捻られるような外力をかけることなくブレード21aの向きを変えることができる。
【0104】
続いて、ブレード21aの回転軸となる上記一点から遠い側のブレード21aの端P3を培養面18aの外縁に沿わせた状態で、培養面18aにブレード21aが接触された状態を維持しつつ、ブレード21aを培養面18aに対して相対移動させる。このとき、第一腕部45Lは、ブレード21aを培養面18a上で移動させているときには、培養容器18内にある細胞回収液と細胞との混合物(細胞懸濁液)が培養容器18の一部に集積されるように、培養容器18の傾斜状態を順次変更する。具体的には、培養面18aから剥離された培養細胞を含む細胞懸濁液が、培養容器18に対するブレード21aの移動方向の前方に位置するように、培養容器18の傾斜状態が変更される。このとき、培養面18aに沿ってブレード21aを移動させる動作も同時に行なわれており、第一腕部45Lと第二腕部45Rとは、培養容器18及びセルスクレーパー21の相対位置が三次元的に相対移動するように協調動作される。
【0105】
ブレード21aが培養面18aの外縁に沿って360度回転動作された後、第二ロボットハンド60Rは、セルスクレーパー21を回転させて、セルスクレーパー21の進行方向前方にある細胞を、傾斜された培養容器18の最下端に回収する。その後、第二ロボットハンド60Rは、セルスクレーパー21を廃棄容器29に廃棄する。
【0106】
(ステップS5:細胞の回収)
ロボット40は、細胞回収液が入っている培養容器18を第一ロボットハンド60Lによって把持し、第二ロボットハンド60Rは何も把持していない状態となっている。また、第一ロボットハンド60Lは、細胞のかきとりが終了したときの培養容器18の位置から培養容器18の位置関係を変えることなく、培養容器18の一箇所に細胞懸濁液を保持している。
【0107】
第二ロボットハンド60Rは、上記ステップS3と同様に、マイクロピペッター22を把持して新たなピペットチップ20をマイクロピペッター22に取り付ける。さらに、ピペットチップ20の先端が培養面18aに向けれた状態となるように、第一ロボットハンド60Lの上方に第二ロボットハンド60Rを移動させる。
【0108】
さらに、ロボット40は、第一ロボットハンド60Lと第二ロボットハンド60Rとを、吸引吐出用治具31の下へと移動させる(図19参照)。第一ロボットハンド60Lと第二ロボットハンド60Rとが吸引吐出用治具31の下へと到着した後、ロボット40は、第二ロボットハンド60Rを上昇させ、マイクロピペッター22のプッシュロッドを上記第一ストップ位置まで押し下げる。その後、第一ロボットハンド60Lを上昇させ、細胞懸濁液内にピペットチップ20の先端を差し入れる。ピペットチップ20の先端は、傾斜された培養容器18の最下端に位置決めされる。ロボット40は、第一ロボットハンド60Lと第二ロボットハンド60Rとの相対位置が固定された状態で第一ロボットハンド60Lと第二ロボットハンド60Rとを下降させる。これにより、プッシュロッドを押圧していた吸引吐出用治具31はプッシュロッドから離間し、ピペットチップ20内には細胞懸濁液が吸引される。
【0109】
ロボット40は、第二ロボットハンド60Rを、作業用のチューブラック24Aに配置されたマイクロチューブ19の開口の上方へと移動させる。さらに、マイクロチューブ19の容器本体部19a内にピペットチップ20を差し入れる。本実施形態では、マイクロチューブ19の容器本体部19aにピペットチップ20を差し入れる動作において、まず、マイクロピペッター22を垂直に立てた状態でマイクロピペッター22を下降させ、マイクロチューブ19の容器本体部19a内にピペットチップ20の先端を挿入する。その後、マイクロピペッター22が垂直軸からわずかに傾斜するように第二ロボットハンド60Rを傾斜させる。これにより、ピペットチップ20の先端は容器本体部19aの内側の側面へと向けられる。
【0110】
ロボット40は、上記ステップS3と同様の手順によって、第一ロボットハンド60Lの一部によってプッシュロッドを押圧し、細胞懸濁液をピペットチップ20から吐出させる。ピペットチップ20から吐出された細胞懸濁液は、容器本体部19aの内面に沿って容器本体部19aの底へと流れ込む。
【0111】
ロボット40は、第二ロボットハンド60Rのグリッパ61に連結された一対のビット64を、蓋が開けられた状態のマイクロチューブ19に当接させ、一対のビット64によって蓋部19bを押圧してマイクロチューブ19のヒンジ19cを湾曲させる。さらに、一対のビット64によって蓋部19bを押圧して容器本体部19a内に蓋部19bを押し込む。
これにより、マイクロチューブ19の蓋が閉められる。
【0112】
なお、第二ロボットハンド60Rによってマイクロチューブ19の蓋が閉められるのと平行して、第一ロボットハンド60Lは、廃棄容器29の上に移動され、廃棄容器29の上で、把持部材73の先端が下に向けられるように第一ロボットハンド60Lが回転され、さらにグリッパ61によって一対のビット64が開動作される。これにより、培養容器18は、廃棄容器29内に落下する。
【0113】
(ステップS6:細胞の分離)
ロボット40は、第一ロボットハンド60L、第二ロボットハンド60Rともに何も把持していない状態となっている。
ロボット40は、第一ロボットハンド60Lと第二ロボットハンド60Rとの何れか一方(本実施形態では第一ロボットハンド60L)によって、マイクロチューブ19を把持する。このとき、ロボット40は、第一ロボットハンド60Lの長手軸線X1が鉛直方向を向き一対のビット64の先端が下を向くように第一ロボットハンド60Lの姿勢を制御する。また、ロボット40は、細胞懸濁液が内部に収容されたマイクロチューブ19の上に一対のビット64が位置するように第一ロボットハンド60Lの位置を移動させる。さらに、ロボット40は、第一ロボットハンド60Lのグリッパ61によって一対のビット64を開動作させてから、矩形凹部70の高さがマイクロチューブ19の蓋部19b及びフランジ部19dの高さと一致するまで第一ロボットハンド60Lを下降させる。
【0114】
矩形凹部70の高さがマイクロチューブ19の蓋部19b及びフランジ部19dの高さと一致している状態で、ロボット40はグリッパ61により一対のビット64を閉じる。これにより、マイクロチューブ19は、爪部71によって容器本体部19aの外周面が保持された状態で一対のビット64によって把持される。
【0115】
ロボット40は、作業用のチューブラック24Aからマイクロチューブ19を引き抜くように第一ロボットハンド60Lを上昇させ、胴部41の旋回部44を固定部42に対して回動させて、旋回部44の正面を遠心機14へ向ける。旋回部44の正面が遠心機14に向けられている状態では、ロボット40の第一腕部45L及び第二腕部45Rはともに遠心機14を操作しやすい位置関係になる。
【0116】
ロボット40は、マイクロチューブ19を把持している第一腕部45L以外の腕部(第二腕部45R)によって、遠心機14の蓋を開ける。本実施形態では、遠心機14の蓋は、ヒンジによって遠心機14の本体と連結された蓋である。ロボット40は、遠心機14の蓋の上面を第二ロボットハンド60Rの一対のビット64によって押下して、蓋のロックを解除する。さらに、第二ロボットハンド60Rの把持部材73の一部を遠心機14の蓋の下面に係合させ、第二ロボットハンド60Rを上昇させて遠心機14の蓋を開ける。第二ロボットハンド60Rは、蓋が開くときの蓋の軌跡に沿って蓋を移動させる。
【0117】
本実施形態では、遠心機14のローターには、細胞懸濁液が収容されたマイクロチューブ19の重量と略等しいバランスチューブが予め取り付けられている。ロボット40は、第二ロボットハンド60Rに取り付けられたレーザーセンサ63により、ローター内におけるバランスチューブの位置を検出する。バランスチューブの位置が検出されたら、第二ロボットハンド60Rによって、ローター若しくはバランスチューブを把持して、バランスチューブが遠心機14の正面側に位置するようにローターを回転移動させる。
【0118】
第一ロボットハンド60Lは、回転軸を間に挟んでバランスチューブと反対側に、第一ロボットハンド60Lによって把持されたマイクロチューブ19を取り付ける。本実施形態では、マイクロチューブ19を取り付ける部分が遠心機14の奥側となるようにローターを回転させるので、アングルローター式の遠心機14であっても、第一ロボットハンド60Lによってマイクロチューブ19をローターに取り付けやすい。
【0119】
ロボット40は、第二ロボットハンド60Rを用いて、遠心機14の蓋を開けたときの動作とは逆順で遠心機14の蓋を閉め、遠心機14の回転数及び動作時間を決定するボタンに対して所定の値の入力し、遠心機14の動作を開始させる。本実施形態では、ロボット40は、遠心機14の制御パネルに設けられた押しボタンスイッチを押すことによって入力を行なうようになっている。
【0120】
遠心機14の動作が停止したら、ロボット40は、再び第二ロボットハンド60Rを用いて遠心機14の蓋を開ける。続いて、ロボット40は、第二ロボットハンド60Rに取り付けられたレーザーセンサ63により、ローター内におけるバランスチューブの位置を検出する。バランスチューブの位置が検出されたら、マイクロチューブ19をローターに取り付ける際の上記動作と同様にバランスチューブを正面側へと移動させ、細胞懸濁液が収容されたマイクロチューブ19を第一ロボットハンド60Lの一対のビット64によって把持する。
【0121】
このとき、図23に示すように、第一ロボットハンド60Lは、一対のビット64の爪部71がマイクロチューブ19の蓋部19bおよびフランジ部19dの外周面に当接するようにしてマイクロチューブ19を把持する。これは、本実施形態で例示する遠心機14のローターが、マイクロチューブ19のうち蓋部19b、ヒンジ19c、及びフランジ部19dを除いた全てがローター内に入り込む孔によってマイクロチューブ19を保持してるので、一動作で容器本体部19aの外周面を把持するのが難しいことが理由である。
【0122】
一対のビット64の爪部71によってマイクロチューブ19の蓋部19bおよびフランジ部19dの外周面が把持された状態で、胴部41の旋回部44は固定部42に対して旋回されて再び作業台35に向けられる。
遠心機14による処理後のマイクロチューブ19内は、細胞のペレットが底部に張り付き、細胞回収液が細胞のペレットに重層された状態となっている。
【0123】
ロボット40は、第一ロボットハンド60Lを移動させ、細胞のペレットを有するマイクロチューブ19を作業用のチューブラック24Aに載置する。さらに、上述のステップS1と同様の手順により、マイクロチューブ19の蓋を開ける。その後、上記ステップS5と同様の手順により、吸引吐出用治具31を使用して、マイクロチューブ19内の細胞回収液を回収して、ピペットチップ20とともに廃棄容器29に廃棄する。
【0124】
(ステップS7:細胞溶解液の添加)
ロボット40は、細胞のペレットが収容され蓋が開いた状態のマイクロチューブ19が第一ロボットハンド60Lによって把持され、マイクロピペッター22が第二ロボットハンド60Rに把持された状態となっている。
ロボット40は、試薬保管ブロック27において細胞溶解液が収容された蓋付き容器26の蓋を上記ステップS3で説明したのと同様の動作により開け、細胞溶解液をピペットチップ20内に吸引し、ピペットチップ20内に吸引された細胞溶解液をマイクロチューブ19内に吐出させる。さらに、ロボット40は、マイクロチューブ19を作業用のチューブラック24Aに載置し、上記ステップS5で説明したのと同様の動作によってマイクロチューブ19の蓋を閉める。
【0125】
(ステップS8:試料の攪拌)
ロボット40は、細胞のペレット及び細胞溶解液が収容され蓋が閉じられた状態のマイクロチューブ19が第一ロボットハンド60Lによって把持された状態となっている。第二ロボット40の状態については特に限定されない。
【0126】
ロボット40は、上記ステップS6で説明したのと同様の動作により、マイクロチューブ19の蓋部19bおよびフランジ部19dが矩形凹部70内に入り込む位置関係で、第一ロボットハンド60Lの一対のビット64によってマイクロチューブ19を保持する。
【0127】
このとき、上記ステップS6における動作とは異なり、第一ロボット40の一対のビット64は、容器本体部19aの外周面を爪部71が押圧している状態よりもわずかに開いた状態でマイクロチューブ19を保持している。さらに、一対のビット64は、蓋部19bの厚さ方向にわずかにクリアランスが残るように矩形凹部70の寸法が設定されている。このため、一対のビット64に保持されたマイクロチューブ19は、蓋部19b及びフランジ部19dの近傍を支点として揺動可能となっている。
【0128】
ロボット40は、第一ロボットハンド60Lをミキサー15(ボルテックスミキサー15(登録商標))の上まで移動させ、マイクロチューブ19の底が下になる状態で第一ロボットハンド60Lを下降させる。マイクロチューブ19の底がミキサー15に接触するとミキサー15のスイッチが入り、マイクロチューブ19内の細胞ペレット及び細胞溶解液は攪拌される。
【0129】
(ステップS9:アルミブロック恒温槽による静置)
ロボット40は、細胞のペレット及び細胞溶解液が収容され蓋が閉じられた状態のマイクロチューブ19が第一ロボットハンド60Lによって把持された状態となっている。なお、第二ロボットハンド60Rは何も把持していない状態となっている。
【0130】
ミキサー15によって攪拌されたマイクロチューブ19は、第一ロボットハンド60Lによって保持されている。この状態で、胴部41の旋回部44が固定部42に対して旋回し、旋回部44の正面がアルミブロック恒温槽16に向けられる。ロボット40は、第二ロボットハンド60Rによってアルミブロック恒温槽16の蓋を把持して当該蓋を開ける。
【0131】
アルミブロック恒温槽16の蓋が開けられたら、第一ロボットハンド60Lが移動され、第一ロボットハンド60Lに把持されたマイクロチューブ19がアルミブロックに取り付けられる。
ロボット40は、アルミブロック恒温槽16の蓋を開ける手順と逆順で蓋を閉め、細胞溶解液に溶解された細胞ペレットを、所定の温度で所定時間だけ静置する。
【0132】
所定時間が経過した後、ロボット40は、アルミブロック恒温槽16の蓋を再び開け、第一ロボットハンド60Lの爪部71によってマイクロチューブ19の蓋部19bおよびフランジ部19dの外周面を把持し、マイクロチューブ19を作業用のチューブラック24Aに載置する。
【0133】
(ステップS10:細胞残滓の除去及び磁性体ビーズの添加)
ロボット40は、アルミブロック恒温槽16によって冷却された細胞のペレット及び細胞溶解液が収容されたマイクロチューブ19が第一ロボットハンド60Lによって把持された状態となっている。なお、第二ロボットハンド60Rは何も把持していない状態となっている。
【0134】
細胞残滓の除去は、アルミブロック恒温槽16によって冷却された細胞のペレット及び細胞溶解液が収容されたマイクロチューブ19を遠心分離(上記ステップS6参照)し、マイクロチューブ19内の上清をマイクロピペッター22を用いて回収(上記ステップS5参照)することにより行なわれる。細胞残滓は、上清を取り終えたマイクロチューブ19の底にペレット状になっており、マイクロチューブ19ごと廃棄容器29に廃棄される。
【0135】
磁性体ビーズの添加は、回収された上清を、磁性体ビーズが収容されたマイクロチューブ19内に吐出することにより行なわれる。なお、磁性体ビーズが収容されたマイクロチューブ19は、アルミブロック恒温槽16内に保管されているものを取り出して利用することができる。
【0136】
(ステップS11:試料とビーズとの混和)
ロボット40は、第一ロボットハンド60L及び第二ロボットハンド60Rが何も把持していない状態となっている。
ロボット40は、作業用のチューブラック24Aに載置されたマイクロチューブ19を、第二ロボットハンド60Rの一対のビット64によって上から把持する(上記ステップS6参照)。さらに、第二ロボットハンド60Rによって把持されたマイクロチューブ19は第一ロボットハンド60Lに受け渡される。具体的には、図24に示すように、第二ロボットハンド60Rによって蓋部19b及びフランジ部19dの近傍が把持されたマイクロチューブ19は、第一ロボットハンド60Lの一対のビット64によって、対向する矩形凹部70の間に容器本体部19aの外周面が挟まれるように把持される。
【0137】
次に、ロボット40は、旋回部44の正面が保冷庫12に向くように、固定部42に対して旋回部44を旋回動作させる。なお、ロボット40は、第二ロボットハンド60Rから第一ロボットハンド60Lへのマイクロチューブ19の受け渡しをしながら旋回部44が旋回されるようになっていてもよい。
【0138】
次に、ロボット40は、保冷庫12のドアを第二ロボットハンド60Rを用いて移動させ、保冷庫12内に配置されたローテータ13にマイクロチューブ19を取り付ける。ローテータ13は、ロボット40が発する駆動信号によって電源が入り、チューブ取付部13aが回転するようになっている。
ロボット40は、チューブ取付部13aを回転させ、又は第一ロボットハンド60Lを回転させるとともに、レーザーセンサ63によってチューブ取付部13a上のカラーマーカーを検出することにより、チューブ取付部13aを所定の初期位置にセットし、初期位置にセットされたチューブ取り付け部にマイクロチューブ19を取り付ける。
【0139】
その後、ロボット40は、第二ロボットハンド60Rを用いて保冷庫12のドアを閉め、ローテータ13を回転させる駆動信号を発する。これにより、上清と磁性体ビーズとはローテータ13によって混合される。
ローテータ13によって所定の時間だけ混合操作がなされたら、ロボット40によって、ローテータ13が停止され、第一ロボットハンド60L若しくは第二ロボットハンド60Rによって、取り付け時とは逆順でチューブ取付部13aからマイクロチューブ19が取り外される。さらに、マイクロチューブ19は、作業用のチューブラック24Aに載置される。
【0140】
(ステップS12:ビーズの洗浄)
ロボット40は、ローテータ13から取り外されて作業用のチューブラック24Aに載置されたマイクロチューブ19の蓋を開け(上記ステップS1参照)、作業台35に設けられた磁石25までマイクロチューブ19を搬送し、当該マイクロチューブ19を磁石25に取り付ける。これにより、磁性体ビーズは磁石25に吸着される。
【0141】
ロボット40は、第二ロボットハンド60Rによってマイクロピペッター22を把持し、第一ロボットハンド60Lによってプッシュロッドを操作することにより、マイクロチューブ19内の液体を吸引して液体を廃棄する。さらに、蓋付き容器26内に収容された洗浄液をマイクロピペッター22を用いてマイクロチューブ19内に加える。
【0142】
その後、ロボット40は、マイクロチューブ19の蓋を閉め(上記ステップS5参照。)、第一ロボットハンド60Lによって磁石25からマイクロチューブ19を取り外して保持する。その後、第一腕部45Lを動作させることにより、第一ロボットハンド60Lを上下反転させる動作を複数回繰り返し、第一ロボットハンド60Lに保持されたマイクロチューブ19内の洗浄液と磁性体ビーズとを転倒混和する。
【0143】
ステップS12においては、たとえば洗浄液による洗浄操作を複数回(たとえば3回)繰り返すことが好ましい。これにより、磁性体ビーズは洗浄液によって洗浄される。
最後の洗浄操作の後、磁石25によって磁性体ビーズを吸着させた状態で、ロボット40によってマイクロピペッター22を操作して洗浄液を除去する。
【0144】
(ステップS13:タンパク質の溶出)
ロボット40は、上記ステップS12において洗浄液が除去されたビーズに、溶出液を添加する。本実施形態では、溶出液は、アルミブロック恒温槽16内に配置されたマイクロチューブ19内に配置されており、ロボット40は、マイクロチューブ19の蓋を開け、マイクロチューブ19内の溶出液をピペットチップ20内に吸引して用いる(上記ステップS1及びステップS3参照)。
溶出液が添加された後、ロボット40はマイクロチューブ19の蓋を閉め(上記ステップS5参照)、ミキサー15により攪拌する(上記ステップS8参照)。さらに、ロボット40は、ミキサー15による攪拌操作がなされたマイクロチューブ19を、アルミブロック恒温槽16に取り付けて、所定時間だけ静置する(上記ステップS9参照)。
ステップS13では、磁性体ビーズの抗体からタンパク質が外れ、溶出液中に溶出される。
【0145】
(ステップS14:ビーズの除去及びタンパク質の回収)
ステップS14では、マイクロチューブ19を磁石25に取り付け、上記ステップS13においてタンパク質が溶出された溶出液をマイクロピペッター22を使用して回収し、新たなマイクロチューブ19へと溶出液を移す。これで、磁性体ビーズと溶出液とが分離される。
【0146】
ロボット40は、磁性体ビーズから分離された溶出液が収容されたマイクロチューブ19に、タンパク質を沈殿させるための所定の試薬を加え、アルミブロック恒温槽16によって所定の時間だけ冷却状態で静置し(上記ステップS9参照)、冷却された溶出液が収容されたマイクロチューブ19を遠心機14に取り付けて遠心分離する(上記ステップS6参照)。遠心分離されることにより、溶出液中のタンパク質はペレットとしてマイクロチューブ19の底に集められる。
【0147】
(ステップS15:上清の廃棄およびペレットの洗浄)
ステップS15では、ロボット40は、第二ロボットハンド60Rによってマイクロピペッター22を把持し、第一ロボットハンド60Lでマイクロチューブ19を把持し、マイクロピペッター22を用いてマイクロチューブ19内の上清を廃棄する。
続いて、上記ステップS12にて使用された洗浄液とは組成が異なる他の洗浄液を、マイクロチューブ19に加える。その後、第一腕部45Lによって第一ロボットハンド60Lを反転させて、洗浄液とペレットとを転倒混和する。
その後、マイクロチューブ19を遠心機14に取り付けてペレットを再びマイクロチューブ19の底に沈殿させる(上記ステップS6参照)。
その後、洗浄液を除去し、ペレットを溶解させる再溶解液をマイクロチューブ19に加え、マイクロチューブ用シェーカー17にマイクロチューブ19を取り付けてペレットと再溶解液とを混合させる。
ステップS15により、ペレットが再溶解液に溶解された再溶解試料が生じる。
【0148】
(ステップS16:酵素消化)
ステップS15では、ロボット40は、マイクロチューブ用シェーカー17からマイクロチューブ19を取り出し、タンパク質を分解する所定の酵素液をマイクロチューブ19に加える。
その後、ミキサー15によって酵素液と再溶解試料とを混合し(上記ステップS8参照)、遠心機14によって飛沫をマイクロチューブ19の底部に回収し(上記ステップS6参照)、試薬保管ブロック27若しくはCO2インキュベータ11内など、所定の温度に設定された機器によって所定温度で静置する。
以上の各ステップによって、質量分析に使用される分析用試料が精製される。
【0149】
以上説明したように、本実施形態の液体処理システム1及び液体処理方法によれば、複数の腕部(第一腕部45L及び第二腕部45R)を有するロボット40を用いて理化学機器10を操作するので、多数のロボット40をシステム内に備えるシステムと比較して構成を簡素にすることができる。
【0150】
また、本実施形態の液体処理システム1は、液体の処理に用いられる全ての理化学機器10が第一ロボットハンド60Lと第二ロボットハンド60Rとの双方の可動範囲内に配置されているので、一台のロボット40によって一連の処理を行うことができる。
【0151】
また、第一ロボットハンド60Lと第二ロボットハンド60Rとが同形なので、ロボットハンド60の左右によらず同じ処理ができる。このため、旋回部44を旋回させる範囲に制限が生じるような狭い作業空間においても好適に処理を行うことができる。
【0152】
また、本実施形態の液体処理システム1は、従来手作業で行っていた分析用試料の調製を、人手で行なうのと同様の理化学機器10を用いて自動化することができる。このため分析用試料を調製するだけのために専用の理化学機器を設計して採用する場合と比較して、システムを安価に構築することができる。
【0153】
また、アダプタ22bを設ける程度で一般的な理化学機器10を用いたシステムを構築することができ、人間と同等の自由度を有するロボット40によって各理化学機器10を制御できるので、手作業を想定して考案されたプロトコール(作業手順)を容易に自動化することができる。また、論文等に記載されたとおりの機器構成やプロトコールに基づいたシステムを容易に構築することができる。
【0154】
また、本実施形態における細胞のかきとり動作では、セルスクレーパー21のブレード21aを培養面18aから離すことなく一筆書きにより細胞をかきとることができる。このため、細胞にかかる外力を最小限に抑えることができ、細胞を用いて精製された試料の品質を高めることができる。
【0155】
また、細胞のかきとり動作においてブレード21aの進行方向が反転することがないので、ブレード21aが捻れたりしてブレード21aと培養面18aとの間に隙間が生じる可能性を低く抑えることができる。これにより、細胞の回収率を安定させることができる。
【0156】
また、ブレード21aの進行方向の前方に細胞懸濁液を集めながら細胞をかきとるようにブレード21aが移動されるので、かきとられた細胞は直ちに液体中に分散する。このため、細胞の一部が乾いてしまう可能性を低く抑えることができ、作業ごとの細胞のコンディションのばらつきを低く抑えることができる。
【0157】
また、上述の細胞のかきとり動作のように手作業で行なう場合には無理な姿勢となる動作でも、ロボット40によれば無理なく繰り返し実行できるので、手作業によって作業を行なう場合と比較して高品質の分析用試料を再現性良く調製することができる。
【0158】
また、ロボット40の多関節アーム46が7自由度を有しているので、狭い空間内でロボットハンド60を容易に所望の姿勢にすることができる。その結果、理化学機器10が高い密度で配置された空間であってもロボット40を動作させることができ、システムを小型化することができる。また、ロボット40の胴部41の周囲で胴部41に近い位置でもロボットハンド60を好適に動作させることができるので、システム内のデッドスペースが少ない。
【0159】
また、本実施形態では、多関節アーム46が7自由度を有しているので、理化学機器10のレイアウトの一部が変更された場合でも、理化学機器10が占有する空間を避けてロボット40を動作させるためのティーチングが容易である。
【0160】
また、各ロボットハンド60に設けられた一対のビット64は、マイクロチューブ19を姿勢が異なる3通りの持ち方で把持することができる。このため、理化学機器10の形状に応じて最適な持ち方を選択することができる。また、マイクロチューブ19の蓋部19b及びフランジ部19dが矩形凹部70内に挿入された状態でマイクロチューブ19を把持した場合に、容器本体部19aをとの間に僅かな隙間を空けて緩く掴む持ち方をすることができるので、ミキサー15を使用した場合にマイクロチューブ19の内容物がよく攪拌される。
【0161】
また、マイクロチューブ19の蓋を開ける際に、ヒンジ19cに一対のビット64の一部を当接させているので、ヒンジ19cの弾力によって蓋部19bが開こうとするのを、ヒンジ19cに当接された一対のビット64によって支えることができる。これにより、蓋部19bが勢いよく開いてマイクロチューブ19が振動する可能性を低く抑え、マイクロチューブ19内に収容された試料に振動が伝わりにくくなる。その結果、高品質の分析用試料を再現性良く調製することができる。
【0162】
また、第一ロボットハンド60Lと第二ロボットハンド60Rとがいずれも一対のビット64を有しているので、第一ロボットハンド60Lと第二ロボットハンド60Rとの間でマイクロチューブ19の受け渡しをしてマイクロチューブ19の持ち方を変えることができる。これにより、マイクロチューブ19と一旦載置してから別の持ち方で掴みなおすよりも素早く持ち方を変えることができる。さらに、旋回部44を旋回動作させている間に持ち替えを完了させることもでき、異なる理化学機器10間でマイクロチューブ19を移載する処理速度が速い。
【0163】
また、4つの把持部材73によって培養容器18の底部の外周を保持することができるので、培養容器18の外周面を構成する壁部に大きな力がかからない。このため、培養容器18が変形したり割れたりするのを防止することができる。
なお、培養容器18の培養面18aが湾曲した状態で把持されていると、セルスクレーパー21のブレード21aと培養面18aとの密着状態が安定せずかきとり動作ごとに細胞の回収率や細胞のコンディションにばらつきが生じるおそれがある。これに対して、本実施形態では、培養容器18の底部の外周を把持部材73によって保持することにより、培養容器18の底部が湾曲するのを抑えることができ、細胞の回収率や細胞のコンディションを安定させることができる。
【0164】
また、本実施形態では、押蓋式のマイクロチューブの蓋部を開閉することができるので、スクリューキャップ式のマイクロチューブを必要とする場合よりも消耗品のコストが低い。
【0165】
以上、本発明の実施形態について図面を参照して詳述したが、具体的な構成はこの実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更等も含まれる。
たとえば、上述の実施形態では、ロボット40は、第一腕部45Lと第二腕部45Rとの2つの腕部を備えている例を示したが、3以上の腕部を同一の胴部41に備えるロボット40とすることもできる。この場合、一人の手作業では困難な処理をロボット40にさせることができる。
【0166】
上述の実施形態では、第一腕部45Lおよび第二腕部45Rは7自由度を有する多関節アーム46を備えている例を示したが、7自由度未満の自由度とすることもできる。この場合、各腕部の動作の制限は増えるが、ロボット40の構成をシンプルにすることができる。
また、上述の実施形態及び変形例において示した構成要素は適宜に組み合わせて構成することが可能である。
【符号の説明】
【0167】
1 液体処理システム
2 枠体
3 光学センサ
10 理化学機器
11 CO2インキュベータ
12 保冷庫
13 ローテータ
14 遠心機
15 ミキサー
16 アルミブロック恒温槽
17 マイクロチューブ用シェーカー
18 培養容器
18a 培養面
19 マイクロチューブ
19a 容器本体部
19b 蓋部
19c ヒンジ
19d フランジ部
20 ピペットチップ
21 セルスクレーパー
21a ブレード
21b 柄部
22 マイクロピペッター
22a 本体
22b アダプタ
22c イジェクトボタン
23 スタンド
24、24A チューブラック
25 磁石
26 蓋付き容器
27 試薬保管ブロック
27A 載置台
28 トラップ
28a 管路部材
29、29A 廃棄容器
30 ピペッターラック
31 吸引吐出用治具
32 イジェクト用治具
33 チップラック
35 作業台
40 ロボット
41 胴部
42 固定部
43 台座
43a 基底面
44 旋回部
45L 第一腕部
45R 第二腕部
46 多関節アーム
60 ロボットハンド
60L 第一ロボットハンド
60R 第二ロボットハンド
61 グリッパ
62 把持センサ
63 レーザーセンサ
64 一対のビット
65 第一ビット
66 本体部材
67 内側面
68 大径把持部
69 小径把持部
70 矩形凹部
71 爪部
72 突起部
73 把持部材
74 ビット
75 駆動手段
76 制御手段
【技術分野】
【0001】
本発明は、液性の生物学的材料を処理する液体処理システム及びそのシステムを用いた液体処理方法に関する。
【背景技術】
【0002】
従来、生物学や医学の分野では、生物に由来する材料を検体とした分析が行なわれている。生物に由来する材料は、血液や尿などの生物材料や、培養細胞の懸濁液など、液性の材料であることが多い。このような液性の材料は、液体を精度よく定量することができる機器(たとえばマイクロピペッター)を用いて処理される。
【0003】
近年、多数の検体を迅速に分析したり、人体に有害な検体を分析したりする目的で、分析機器等を操作するロボットを備えたシステムが知られている。たとえば特許文献1には、インキュベーターや遠心分離機など培養操作に必要な機器類と、これらの機器類を操作するロボットとを備えた自動細胞培養装置が記載されている。特許文献1に記載の自動細胞培養装置は、人手に代えてロボットに培養操作をさせることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−54690号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の自動培養装置では、ロボットによって好適に操作可能な専用の機器類がロボットと協動するようになっているので、手作業による従来の分析と同一の機器構成及び手順を再現することが困難である。さらに、ロボット専用の機器類及びロボット専用の消耗品を要するので、装置構成が大掛かりとなり且つランニングコストが高くなるおそれがある。
【0006】
本発明は、上述した事情に鑑みてなされたものであって、その目的は、簡素な構成で精度の高い処理をすることができる液体処理システム及び液体処理方法を提供することである。
【課題を解決するための手段】
【0007】
上記課題を解決するために、この発明は以下の手段を提案している。
本発明の液体処理システムは、液性の生物学的材料を処理する液体処理システムであって、所定の作業空間内に設定された軸線回りに回動自在に設けられた胴部と、前記胴部に設けられ少なくとも3自由度以上の自由度を有する第一腕部と、前記胴部に設けられ少なくとも3自由度以上の自由度を有する第二腕部と、前記胴部、前記第一腕部、及び前記第二腕部をそれぞれ動作させる駆動手段と、前記作業空間内且つ前記第一腕部と前記第二腕部との少なくともいずれかの可動範囲内に配置された理化学機器と、を備え、前記理化学機器の位置及び形状に基づいたティーチングプレイバックにより前記駆動手段を動作させて前記理化学機器を用いた前記生物学的材料の処理をすることを特徴とする液体処理システムである。
【0008】
また、前記第一腕部は前記理化学機器を取り扱うための第一ロボットハンドを備え、前記第二腕部は前記理化学機器を取り扱うための第二ロボットハンドを備え、前記理化学機器であって互いに異なる処理を行う複数の理化学機器が、前記第一ロボットハンドと前記第二ロボットハンドとの少なくともいずれかの可動範囲内に配置されていることが好ましい。
【0009】
また、前記複数の理化学機器であって前記生物学的材料の処理のうち所定の手順に従って実行される処理に用いられる全ての理化学機器が前記第一ロボットハンドと前記第二ロボットハンドとの双方の可動範囲内に配置されていることが好ましい。
【0010】
また、本発明の液体処理システムは、前記第一ロボットハンドと前記第二ロボットハンドとの相対位置を検出し、前記第一腕部と前記第二腕部とを協調動作させることが好ましい。
【0011】
また、前記第一ロボットハンドと前記第二ロボットハンドとは同形であることが好ましい。
【0012】
また、本発明の液体処理システムは、前記液性の生物学的材料として、付着性の培養細胞が懸濁された細胞懸濁液を調製するシステムであり、前記理化学機器は、前記培養細胞が培養される培養面を底部に有し上部が開口された培養容器と、前記培養細胞を前記培養面からかきとるブレードが設けられたセルスクレーパーと、を含み、前記第一ロボットハンドは、前記開口が上に向けられた状態で前記培養容器を把持し、前記第二ロボットハンドは、前記セルスクレーパーを把持し、前記第一腕部及び前記第二腕部は、前記培養面において前記培養面の中央から離間した一箇所に、前記中央と前記一箇所とを結ぶ直線と交差する方向に前記ブレードの長手方向が向くように、前記ブレードを接触させ、前記一箇所において前記培養面に接触された前記ブレードを、前記一箇所から前記中央を通って反対側まで前記培養面に沿って移動させ、前記反対側まで移動された前記ブレードを、前記ブレードの長手方向の延長線上であって前記ブレードの長手方向の両端よりも外側の一点を回転軸として、前記両端のうち前記一点から遠い側の端が前記培養面の外縁に位置するまで、前記培養面と前記ブレードとが接触された状態で回転させ、前記一点から遠い側の前記ブレードの端を前記外縁に沿わせた状態で、前記培養面に前記ブレードが接触された状態で前記ブレードを前記培養面に対して相対移動させることを特徴とし、さらに、前記第一腕部は、前記ブレードを前記培養面上で移動させているときには、前記培養容器内にある細胞懸濁液が前記培養容器の一部に集積されるように前記培養容器を傾斜させ、前記培養面から剥離された前記培養細胞を含む細胞懸濁液が前記培養容器に対する前記ブレードの移動方向の前方に位置するように、前記第二腕部と協調動作されることが好ましい。
【0013】
また、前記第一ロボットハンドと前記第二ロボットハンドとのうち少なくとも前記第二ロボットハンドは、開閉動作可能な一対のビットを有し、前記一対のビットは、前記培養容器の深さ方向における前記培養容器の外寸以上の長さを有する棒状の把持部材を4つ備え、前記把持部材は、前記一対のビットの各々に、互いに平行に2つずつ配置されており、各前記把持部材の先端は、同一の仮想平面内に存する、ことを特徴とし、さらに、前記第二ロボットハンドは、前記培養容器の開口側から底部側へ向かって前記把持部材を移動させて前記培養容器の外周を囲むように前記把持部材を配置し、前記一対のビットを閉じることにより、前記把持部材の先端によって前記培養容器の底部の外周を保持し、且つ前記先端よりも基端側の前記把持部材の外周面によって前記培養容器の外周面を保持することが好ましい。
【0014】
また、前記理化学機器は、容器本体部、及び可撓性のヒンジによって前記容器本体部と連結された押蓋式の蓋部、を有するマイクロチューブと、前記マイクロチューブの底部が差し込まれる孔を有して前記マイクロチューブを保持するチューブラックと、を含み、前記第一ロボットハンドと前記第二ロボットハンドとの少なくとも何れかは、前記蓋部が挿入される第一凹部を有するビットを備え、前記第一腕部と前記第二腕部とのうち前記ビットを備える少なくとも一方は、前記蓋部によって閉じられた状態で前記チューブラックに保持された前記マイクロチューブの前記蓋部のうち前記ヒンジの反対側に位置する部分を前記第一凹部に係止させて、前記ビットにおける前記第一凹部以外の一部を前記ヒンジに当接させ、前記ヒンジを支点として前記蓋部を前記容器本体部から引き抜き、または、前記容器本体部に対して前記蓋部が外れた状態で前記チューブラックに保持された前記マイクロチューブの前記蓋部を前記ビットによって押圧して前記ヒンジを湾曲させ、さらに前記蓋部の一部を前記ビットによって押圧して前記容器本体部内に押し込むことが好ましい。
【0015】
また、前記ビットは、前記第一凹部を有する第一ビットと、前記第一凹部と同形の第二凹部を有し前記第一ビットに対して相対移動される第二ビットと、を有し、前記第一ビットと前記第二ビットとは、前記第一凹部と前記第二凹部とが各々の開口が正対するように対向配置され、前記第一ビットと前記第二ビットとは、互いに離間する2点で前記マイクロチューブの容器本体部の外周面を支持する突起部をそれぞれ備え、前記第一凹部及び前記第二凹部は、前記マイクロチューブの蓋部及び前記容器本体部の開口端に形成されたフランジ部が、前記蓋部の厚さ方向に所定のクリアランスが残る状態で挿入されることを特徴とし、前記ビットは、前記マイクロチューブに振動を与えて前記マイクロチューブ内の液体を攪拌する処理において、前記突起部と前記外周面との間に隙間を有する状態で前記マイクロチューブを保持することが好ましい。
【0016】
また、本発明の液体処理システムは、前記第一腕部及び前記第二腕部が少なくとも6自由度以上の自由度を有することが好ましい。
【0017】
また、本発明の液体処理システムは、前記第一腕部及び前記第二腕部を含め前記胴部には2以上の腕部が設けられていることが好ましい。
【0018】
また、前記理化学機器には、電力の供給を受けて動作する汎用理化学機器と、単回使用の汎用容器と、前記汎用容器を保持するラックとの少なくとも何れかが含まれていてもよい。
【0019】
本発明の液体処理方法は、本発明の液体処理システムを用いることを特徴とする液体処理方法である。
【発明の効果】
【0020】
本発明の液体処理システム及び液体処理方法によれば、簡素な構成で精度の高い処理をすることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施形態の液体処理システムを示す平面図である。
【図2】同液体処理システムにおけるロボットの拡大図である。
【図3】同ロボットに設けられたロボットハンドの斜視図である。
【図4】同ロボットに設けられたロボットハンドの斜視図である。
【図5】同ロボットハンドの正面図である。
【図6】同ロボットハンドの平面図である。
【図7】同ロボットハンドの下面図である。
【図8】同ロボットハンドの左側面図である。
【図9】同ロボットハンドの右側面図である。
【図10】同ロボットハンドの背面図である。
【図11】同ロボットハンドの一部の構成を示す拡大図である。
【図12】本発明の液体処理方法を示すフローチャートである。
【図13】同液体処理システムの使用時の動作を説明するための図である。
【図14】同液体処理システムの使用時の動作を説明するための図である。
【図15】同液体処理システムの使用時の動作を説明するための図である。
【図16】同液体処理システムの使用時の動作を説明するための図である。
【図17】同液体処理システムの使用時の動作を説明するための図である。
【図18】同液体処理システムの使用時の動作を説明するための図である。
【図19】同液体処理システムの使用時の動作を説明するための図である。
【図20】同液体処理システムの使用時の動作を説明するための図である。
【図21】同液体処理システムの使用時の動作を説明するための図である。
【図22】同液体処理システムの使用時の動作を説明するための図である。
【図23】同液体処理システムの使用時の動作を説明するための図である。
【図24】同液体処理システムの使用時の動作を説明するための図である。
【発明を実施するための形態】
【0022】
本発明の一実施形態の液体処理システムについて説明する。
本実施形態の液体処理システムは、液性の生物学的材料を処理するシステムである。
本明細書において、液性の生物学的材料とは、生体を構成する物質を含有する液体、細胞や組織などの懸濁液、尿や汗などの代謝産物や分泌物等、を含み、流動性を有する材料を指す。
【0023】
本実施形態では、液体処理システムの例として、付着性の培養細胞が懸濁された細胞懸濁液を調製し、細胞懸濁液を材料として分析用の試料を調製するシステムについて説明する。
【0024】
まず、液体処理システムの構成について、図1ないし図10を参照して説明する。図1は、本実施形態の液体処理システムを示す平面図である。図2は、液体処理システムにおけるロボットの拡大図である。図3及び図4は、ロボットに設けられたロボットハンドの斜視図である。図5ないし図10は、ロボットハンドの六面図であり、順に、正面図、平面図、下面図、左側面図、右側面図、背面図である。図11は、ロボットハンドの一部の拡大図である。
【0025】
図1に示すように、液体処理システム1は、所定の作業空間を規定する枠体2と、枠体2内に配置された理化学機器10及び作業台35と、枠体2内に配置され第一腕部45Lと第二腕部45Rとを有するロボット40とを備える。
【0026】
枠体2は、作業空間を直方体状の空間として仕切り、ロボット40の動作可能範囲を規定し、且つロボット40と人とが接触する危険性を下げる目的で設けられている。
枠体2には、作業空間の内外の境界面に検出領域を有する光学センサ3が取り付けられている。光学センサ3は、枠体2内に物体が進入したり、枠体2内の物体が枠体2外に出たりした場合に、所定の注意喚起信号を発する。なお、液体処理システム1は、所定の注意喚起信号に基づいてシステム全体の動作を停止させるようになっていてもよい。
【0027】
理化学機器10は、生物学分野における実験用機器及び消耗品などを含む。たとえば、電力の供給を受けて動作する汎用理化学機器、単回使用の汎用容器及び器具や、汎用容器を保持するラックなどが本明細書における理化学機器10に含まれる。
具体的には、本実施形態では、液体処理システム1は、電力の供給を受けて動作する理化学機器10として、CO2インキュベータ11、スライド式のドアを有する保冷庫12、ローテータ13、遠心機14、ミキサー15、アルミブロック恒温槽16、及びマイクロチューブ用シェーカー17を備える。
また、単回使用の汎用器具として、培養容器18と、マイクロチューブ19(汎用容器)と、ピペットチップ20と、セルスクレーパー21とを備える。なお、単回使用の汎用器具を洗浄して繰り返し使用することも可能である。
本実施形態では、培養容器18は、付着性の細胞が培養される培養面18aを底部に有し上部が開口された所謂細胞培養ディッシュである。本実施形態では、培養容器18の培養面18aは円形となっている。
【0028】
マイクロチューブ19(図11参照)は、一般的な樹脂製のチューブであって、押蓋式のマイクロチューブである。具体的には、マイクロチューブ19は、容器本体部19aと、可撓性のヒンジ19cによって容器本体部19aと連結された押蓋式の蓋部19bとを有する。また、容器本体部19aの開口部分には、フランジ状に外側へ張り出したフランジ部19dが形成されている。
なお、スクリューキャップ式のマイクロチューブを本実施形態の液体処理システム1用のマイクロチューブ19として採用することもできる。
【0029】
セルスクレーパー21(図21参照)は、培養容器18の培養面18aから培養細胞をかきとるブレード21aと、ロボット40によって把持される柄部21bとを有する。ブレード21aは、可撓性を有する樹脂製であり、培養面18aに押し付けられると僅かに弾性変形して培養面18aに密着する。本実施形態では、後述するかきとり動作において好適に培養面18a上の培養細胞をかきとる目的で、ブレード21aの長さは、培養容器18の培養面18aの直径の1/3以上の長さとなっている。
【0030】
また、本実施形態では、本明細書における理化学機器10の一部として、ロボット40によって使用されるマイクロピペッター22が設けられている(図20参照)。マイクロピペッター22は、公知の構成を有する本体22aと、本体22aの把持部に固定されたアダプタ22bとを有する。アダプタ22bは、後述する一対のビット64によって把持される部材であり、互いに平行に形成された外面が把持されるようになっている。
【0031】
作業台35上には、上記セルスクレーパー21を保持するスタンド23と、マイクロチューブ19の底部が差し込まれる孔を有してマイクロチューブ19を保持するチューブラック24及び作業用のチューブラック24Aと、磁性体ビーズを吸着させるための磁石25と、蓋付き容器26内に貯留される試薬を保管する試薬保管ブロック27と、蓋付き容器26の蓋を載置する載置台27Aと、ミキサー15(たとえばボルテックス(登録商標))と、液体を吸引廃棄する際に液体を貯留させるトラップ28と、使い捨ての器具を廃棄するための廃棄容器29(廃棄容器29A、29B)と、マイクロピペッター22を保持するピペッターラック30と、マイクロピペッター22のプッシュロッドを移動させるために作業台35上に固定された吸引吐出用治具31と、マイクロピペッター22のイジェクトボタンを操作するためのイジェクト用治具32と、マイクロピペッター22に取り付けて使用される単回使用のピペットチップ20が収容されたチップラック33とがそれぞれ位置決めされて設けられている。
【0032】
トラップ28は、図示しないアスピレーター(吸引ポンプ)に接続されており、ロボット40によってアスピレーターの動作が制御される。トラップ28には、液体を吸引するための管路部材28aの一端が接続されており、管路部材28aの他端には、先端が先細に形成された筒状のアスピレーティングチップ(不図示)が取り付けられている。
イジェクト用治具32は、廃棄容器29の開口の上に配置されている。
なお、作業台35上に設けられる上記各構成は、本明細書でいう理化学機器10に含まれる。
【0033】
以上に説明した理化学機器10は、第一腕部45Lと第二腕部45Rとの少なくともいずれかの可動範囲内に配置されている。本実施形態では、これらの理化学機器10は、ロボット40に設けられた後述する第一ロボットハンド60Lと第二ロボットハンド60Rとの双方の可動範囲内に配置されている。理化学機器10は、第一ロボットハンド60Lまたは第二ロボットハンド60Rによって操作される。
【0034】
図1及び図2に示すように、ロボット40は、胴部41と、第一腕部45Lと、第二腕部45Rと、駆動手段75とを備える。
胴部41は、作業空間の基底面43aに固定された固定部42と、固定部42に連結された旋回部44とを備える。本実施形態では、固定部42は、略板状の台座43を介して枠体2に固定されており、台座43の上面が水平な基底面43aとなっている。台座43は、床面に対する基底面43aの傾きを調整可能な複数の脚を有していてもよい。
固定部42と旋回部44とは、作業空間内に設定された軸線(本実施形態では基底面43aに垂直な軸線O1)回りに相対回動自在である。さらに、旋回部44は、駆動手段75から発せられる駆動信号に従って固定部42に対して旋回動作されるようになっている。
【0035】
第一腕部45Lは、胴部41に設けられ6自由度以上の自由度を有する多関節アーム46と、多関節アーム46の先端に設けられたロボットハンド60とを備えている。
【0036】
多関節アーム46は、胴部41側から順に、第一フレーム47、第二フレーム48、第三フレーム49、第四フレーム50、第五フレーム51、及び第六フレーム52を備える。
本実施形態では、多関節アーム46が直線状態である場合の第一フレーム47側を多関節アーム46の基端側と表記し、同状態における第六フレーム52側を多関節アーム46の先端側と表記する。
【0037】
多関節アーム46を構成する各フレームの接続構造については、公知の接続構造を採用することができる。たとえば、国際公開第2007/037131号明細書に開示された多関節マニピュレータを本実施形態の多関節アーム46に適用することができる。各フレームの接続構造の一例を次に示す。
【0038】
第一フレーム47は、胴部41から水平方向へ第一回転軸が延びるフレームであり、胴部41に対して第一回転軸回りに回転する。第二フレーム48は、第一回転軸と直交する第二回転軸回りに第一フレーム47に対して回転するフレームである。第三フレーム49は、第二回転軸と直交する第三回転軸回りに第二フレーム48に対して回転するフレームである。第四フレーム50は、第三回転軸と直交する第四回転軸回りに第三フレーム49に対して回転するフレームである。第五フレーム51は、第四回転軸と直交する第五回転軸回りに第四フレーム50に対して回転するフレームである。第六フレーム52は、第五回転軸と直交する第六回転軸回りに第五フレーム51に対して回転するフレームである。第六フレーム52の先端には、上記ロボットハンド60が、第六回転軸と直交する第七回転軸回りに回転可能に接続されている。
【0039】
本実施形態では、多関節アーム46は、駆動手段75によって、第一回転軸ないし第七回転軸の計7つの回転軸を個別に回転させることができる。すなわち、本実施形態の多関節アーム46は、7自由度を有する。多関節アーム46が6自由度を有していれば3次元空間において多関節アーム46の先端を所望の姿勢に配置することができるが、本実施形態の液体処理システム1は、6自由度に1つの冗長軸を加えた7自由度を有するので、6自由度を有する場合よりも狭い空間内で多関節アーム46の先端を移動させることができる。
【0040】
図2に示すように、本実施形態では、第一腕部45Lと第二腕部45Rとにそれぞれ同形のロボットハンド60(第一ロボットハンド60L、第二ロボットハンド60R)が設けられている。
ロボットハンド60には、第六フレーム52に対するロボットハンド60の回転軸(上記第七回転軸)と直交する方向へ一対のビット64を進退動作させるグリッパ61と、グリッパ61によって把持対象物が把持されたときの反力を検知する把持センサ62と、グリッパ61と一体に第七回転軸回りに回転されるレーザー光源及び光センサを有するレーザーセンサ63と、を備える。
【0041】
グリッパ61は、板状のベース61aを介して第六フレーム52に固定されている。ロボットハンド60は、ベース61aと第六フレーム52との間で着脱可能となっている。なお、本実施形態では、ロボットハンド60を他の構造のロボットハンドに交換して作業をすることは必須ではない。
【0042】
グリッパ61としては、電力の供給を受けて開閉動作を行なう電動グリッパが採用されている。把持センサ62によって反力を検知することにより、グリッパ61は、一対のビット64によって把持対象物を所定の把持力で把持したり、一対のビット64に把持された把持対象物を他の物体に所定の押圧力で押し付けたりすることができる。
【0043】
把持センサ62は、ベース61aに固定されており、図示しない信号線を介してグリッパ61と電気的に接続されている。
【0044】
レーザーセンサ63は、ベース61aに固定されている。レーザーセンサ63は、後述するカラーマーカーを検出したことに基づいて駆動手段75の動作を切り替える目的で設けられている。
【0045】
一対のビット64は、互いに向かい合わされた状態で面対称となる対称形の第一ビット65および第二ビット74を有している。以下では、第一ビット65の構成を中心に説明し、第二ビット74の構成については、対応する部分に対応する符号(添え字「−2」を有する)を必要に応じて付すことで説明を省略する。
【0046】
図3ないし図10に示すように、第一ビット65は、グリッパ61に連結される本体部材66と、本体部材66に固定された把持部材73とを備える。
【0047】
本体部材66は、たとえば金属の板材から切り出された略板状部材であり、グリッパ61に基端が連結され、多関節アーム46の先端側へと突出して設けられている。本体部材66は、グリッパ61によって基端が平行移動され、第二ビット74に対して平行に近接あるいは離間されることにより開閉動作する。
【0048】
本体部材66の基端から先端へ向かう方向における本体部材66の寸法は、把持対象物を好適に把持できる範囲内で短いことが好ましい。これは、本体部材66がコンパクトであるほうが作業空間内における本体部材66の取り回しが容易となるからである。また、本実施形態では、本体部材66を移動させるグリッパ61からの力がかかる基端が本体部材66における力点及び支点となり、把持対象物が把持される先端が作用点となる。このため、本体部材66の基端から先端へ向かう方向における本体部材66の寸法が短い方が、支点と作用点との距離を短くすることができ、本体部材66の先端の位置精度を高めることができる。
【0049】
本体部材66の外面であって第二ビット74側に向けられた面(以下、この面を「内側面67」と称する。)には、基端から先端へ向って、大径把持部68と小径把持部69とがこの順に並べて形成されている。
【0050】
大径把持部68は、一対のビット64の開方向へ向かって内側面67が窪んだ形状を有している。大径把持部68における内側面67の形状は、本体部材66の板厚方向に交線L1が延びる2平面(第一面及68aび第二面68b)を有するように曲がった面形状となっている。
大径把持部68は、円柱形や円筒形の部材を、その部材の中心軸線が上記交線L1と平行となる向きに位置決めして把持するために最適化された形状とされている。すなわち、上記円柱形や円筒形の部材は、外周面に第一面及び第二面が同時に接触するように把持される。このとき、グリッパ61から伝わる把持力によって、上記円柱形や円筒形の部材は、その中心軸線が上記交線L1と平行となるように位置決めして保持される。
【0051】
小径把持部69は、大径把持部68の先端側に形成され一対のビット64の開方向へ向かって内側面67が矩形状に窪んだ矩形凹部70(第一凹部)と、矩形凹部70の先端側に形成された爪部71とを有する。
【0052】
矩形凹部70は、本体部材66の基端から先端に向かう方向における開口寸法が、マイクロチューブ19の蓋部19bの周縁及びフランジ部19dの周縁が自在に挿脱可能となるように僅かにクリアランスを有する寸法とされている。さらに、矩形凹部70の深さは、マイクロチューブ19の蓋部19bの周縁及びフランジ部19dの周縁が矩形凹部70に収容された状態で爪部71の突出端がマイクロチューブ19の容器本体部19aの外周面に接触可能となる深さに設定されている。
【0053】
爪部71は、本体部材66を先端から基端へ向って見たときに中央が矩形状に切り取られた形状を有している。爪部71によって、マイクロチューブ19の蓋部19bの外周面とフランジ部19dの外周面をともに把持することができる。さらに、爪部71によって、マイクロチューブ19の容器本体部19aの外周面を把持することもできる。本体部材66を先端から基端へ向かって見たときの爪部71の突出端は、マイクロチューブ19等の円柱あるいは円筒状の部材を把持する際にこの部材の外周面と当接する突起部72となっている。
なお、爪部71は、矩形状に中央が切り取られた形状であることに代えて、V字状に中央が切り取られた形状であっても構わない。
【0054】
本体部材66の板厚方向から爪部71を見たときに、爪部71における内側面67は、本体部材66の基端から先端へ向う直線(以下「長手軸線X1」と称する。)と平行とされている。爪部71と矩形凹部70との境界部分は、本体部材66の板厚方向から見たときに、一対のビット64の開閉方向に沿う直線(以下、「幅軸線Y1」と称する。)と上記長手軸線X1との双方に交差するように傾斜して形成されている。
【0055】
把持部材73は、培養容器18を把持するために最適化された部材である。把持部材73は、本体部材66の板厚方向の両面のうちの一方(以下、この面を「本体部材66の表面」と称する。)から、本体部材66の板厚方向に延びる棒状部材であり、本体部材66の内側面67よりも一対のビット64の開方向側にオフセットされた位置に設けられている。
把持部材73は、一対のビット64の各々に、互いに平行に2つずつ配置されている。第一ビット65に配置された2つの把持部材73は、本体部材66の板厚方向から見たときに、長手軸線X1と平行な直線上に各把持部材73の中心軸線がともに位置するように配置されている。
【0056】
本体部材66の表面から把持部材73の突出端まで本体部材66の板厚方向に測った寸法は、培養容器18の深さ方向における培養容器18の外寸と等しいか、当該外寸よりもわずかに長い。また、2つの把持部材73の当該寸法は互いに等しい。
【0057】
第二ビット74は、第一ビット65に形成された大径把持部68及び小径把持部69と面対称な形状を有する大径把持部68−2及び小径把持部69−2を有する。また、小径把持部69−2には、第一ビット65の矩形凹部70と面対称に形成された矩形凹部70−2(第二凹部)が設けられている。さらに、第二ビット74は、2つの上記把持部材73を備える。
第一ビット65及び第二ビット74に設けられた計4つの把持部材73は、先端が同一の仮想平面内に存する。
【0058】
図11に示すように、本実施形態では、第一ビット65の矩形凹部70(第一凹部)と第二ビット74の矩形凹部70−2(第二凹部)とのいずれも、蓋部19bによって閉じられた状態のマイクロチューブ19のフランジ部19d及びヒンジ19c部分をともに挿入可能な寸法となっている。
【0059】
図2に示すように、第二腕部45Rは、第一腕部45Lと左右対称に構成され第一腕部45Lと同様の接続構造を有する多関節アーム46と、第一ロボットハンド60Lと同形の第二ロボットハンド60Rとを備える。第二腕部45Rの構成は、第一腕部45Lと左右対称な形状である点以外は第一腕部45Lと同一である。本明細書では、第二腕部45Rの構成要素について、対応する部分に対応する符号(添え字「R」を有する)を必要に応じて付すことで説明を省略する。
第二腕部45Rに設けられたロボットハンド60(第二ロボットハンド60R)は、第一腕部45Lに設けられたロボットハンド60(第一ロボットハンド60L)と同一である。このため、対応する部分に対応する符号(添え字「R」を有する)を必要に応じて付すことで説明を省略する。
【0060】
図1に示す駆動手段75は、胴部41、第一腕部45L、及び第二腕部45Rをそれぞれ動作させるアクチュエータ(不図示)と、アクチュエータに対して所定の駆動信号を出力する制御手段76とを備える。
本実施形態では、アクチュエータとして、サーボ機構を有する電動モータが採用されている。このため、エアシリンダ等の流体圧駆動によるアクチュエータと比較して、位置精度が高く、駆動開始時及び駆動終了時の振動が少ない。
【0061】
制御手段76は、胴部41、第一腕部45L、及び第二腕部45Rの動作手順を入力するためのコントローラを接続することができるようになっており、コントローラを介してロボット40に対してティーチング(教示)により動作手順を記憶させることができる。なお、所謂ダイレクトティーチングによって動作手順を記憶させてもよい。制御手段76は、記憶された動作手順に基づいて各アクチュエータに出力する駆動信号を生成して各アクチュエータを動作させる。すなわち、ロボット40は、理化学機器10の位置及び形状に基づいたティーチングプレイバックにより駆動手段75が各アクチュエータを動作させ、ティーチングによって記憶された動作を再生する。
【0062】
また、制御手段76は、第一腕部45L及び第二腕部45Rに設けられた各アクチュエータのサーボ機構による変位量の情報に基づいて、第一ロボットハンド60Lと第二ロボットハンド60Rとの相対位置を検出し、上述のティーチングに従って、第一ロボットハンド60Lと第二ロボットハンド60Rとを協調動作させることができる。
さらに、制御手段76は、レーザーセンサ63からの所定の出力を受信し、理化学機器10の位置に対応した位置にロボットハンド60を位置決めするようになっている。
【0063】
次に、液体処理システム1を用いて液性の生物学的材料を処理する本実施形態の液体処理方法について、液体処理方法を実施するための液体処理システム1の動作とともに、図12ないし図24を参照して説明する。図12は、本実施形態の液体処理方法を示すフローチャートである。図13ないし図24は、液体処理システム1の使用時の動作を説明するための図である。
【0064】
まず、液体処理システム1が稼働状態にある場合のシステムレイアウトについて説明する。
図1に示すように、液体処理システム1における各理化学機器10は、枠体2の内側あるいは枠体2と隣接した位置に設置される。たとえば、本実施形態では、ローテータ13が内部に配置された保冷庫12のみ枠体2の外側に設置され、他の理化学機器10は枠体2の内側に設置されている。
【0065】
電力によって駆動される理化学機器10はすべて通電可能状態とされている。本実施形態では、電力によって駆動される理化学機器10に対する制御は、すべてロボット40を介して行なわれる。なお、状況によっては液体処理システム1による処理に全く使用されない可能性がある理化学機器10をシステム内に有していても良く、この場合には、使用されない理化学機器10の制御がロボット40によって行なわれる必要がない場合がある。
【0066】
また、本実施形態では、遠心機14には、ローターの重量バランスをとるためのバランスチューブが取り付けられており、バランスチューブには、レーザーセンサ63によって検出されるカラーマーカーが設けられている。
また、ローテータ13には、マイクロチューブ19が取り付けられるチューブ取付部13aにカラーマーカーが設けられている。
【0067】
また、作業台35上に固定されたチューブラック24には、予め複数のマイクロチューブ19がセットされている。本実施形態では、初期状態では、マイクロチューブ19の蓋部19bは閉じられている。なお、マイクロチューブ19の蓋が初期状態では開いているものとしてロボット40に教示すれば、マイクロチューブ19の蓋部19bが開いた状態でマイクロチューブ19がチューブラック24にセットされていてもよい。また、詳細な説明は省略するが、バルク品として供給されるマイクロチューブ19の袋内からマイクロチューブ19を取り出してチューブラック24にセットするまでの動作をロボット40にさせてもよい。
【0068】
さらに、作業台35上に固定された試薬保管ブロック27には、一連の処理に必要となる液性の試薬類が所定の温度で保管されている。試薬保管ブロック27に保管される試薬は、液体処理システム1に適用される処理の種類に応じて適宜選択される。一例を挙げれば、このような試薬類としては、細胞回収液、細胞溶解液、洗浄液、緩衝液などが挙げられる。
【0069】
また、アルミブロック恒温槽16は0℃ないし4℃程度の温度に設定されており、当該温度範囲にて保管される液性の試薬類がセットされている。アルミブロック恒温槽16に保管される試薬類としては、抗体が固定された磁性体ビーズ、溶出液、その他酵素類であり、マイクロチューブ19等に分注されている。
【0070】
次に、培養細胞に含まれる所定のタンパク質を回収して精製する手技を例に、液体処理システム1の動作をステップごとに説明する。以下に例示する手技は、質量分析によりタンパク質の構造等を決定するためにタンパク質が精製された分析用試料を得るために用いられる手技である。
なお、以下の説明では、液体処理システム1による動作が共通若しくは類似するステップについては、詳細がすでに説明されたステップの符号を付すことで重複する説明を省略する。
【0071】
(ステップS1:細胞回収用のマイクロチューブの準備)
ロボット40は、マイクロチューブ19がセットされたチューブラック24まで第一ロボットハンド60Lを移動させる。さらに、蓋部19bが閉じられることで屈曲状態となっているヒンジ19cに一対のビット64の一部が接触する状態でマイクロチューブ19の整列方向に第一ロボットハンド60Lを直線移動させる。これにより、チューブラック24におけるマイクロチューブ19の向きが揃う。
【0072】
ロボット40は、第一ロボットハンド60Lに設けられた一対のビット64をグリッパ61によって開き、第一ロボットハンド60Lの長手軸線X1を鉛直方向に向けた状態で、マイクロチューブ19の側方から一対のビット64をマイクロチューブ19に近づける。一対のビット64に形成された矩形凹部70にマイクロチューブ19の蓋部19bが挿入される位置で、ロボット40は第一ロボットハンド60Lの移動を停止させる。
【0073】
さらに、ロボット40は、グリッパ61によって一対のビット64を閉じる。マイクロチューブ19の容器本体部19aの外周面と一対のビット64の爪部71とが接触すると、接触センサによって反力が検知される。接触センサが反力を検知したら、ロボット40はグリッパ61による一対のビット64の閉動作を停止させる。このとき、ロボット40は、一対のビット64の間にマイクロチューブ19のヒンジ19cが位置するように、蓋部19b及びフランジ部19dが矩形凹部70内に挿入された状態でマイクロチューブ19を把持している。さらに、マイクロチューブ19は、爪部71によって外周面が把持された状態となる。
【0074】
ロボット40は、第一ロボットハンド60Lを上昇させ、チューブラック24からマイクロチューブ19を引き抜く。さらに、ロボット40は、作業用のチューブラック24Aへと第一ロボットハンド60Lを移動させ、マイクロチューブ19をチューブラック24Aに載置する。
【0075】
ロボット40は、グリッパ61により一対のビット64を開動作させ、さらに、グリッパ61を90度回転させ、再び一対のビット64を閉動作させる。このとき、図13に示すように、一対のビット64の長手軸線X1は、垂直状態から僅かに傾斜される。そして、第一ビット65と第二ビット74との一方の先端はヒンジ19cの上部に当接し、蓋部19bにおいてヒンジ19cと反対側の部分は第一ビット65と第二ビット74との他方の矩形凹部(矩形凹部70若しくは矩形凹部70−2)の内部に挿入される。ロボット40は、蓋部19bとヒンジ19cとをそれぞれ前述の通り矩形凹部70に係止させて、ヒンジ19cを回動中心としてロボットハンド60を回動させ、蓋部19bを容器本体部19aから引き抜く。これにより、蓋部19bはヒンジ19cを支点として回動され、マイクロチューブ19の蓋が僅かに開く。
【0076】
さらに、図14に示すように、ロボット40(図2参照)は、開けられた蓋の内面側を一対のビット64によって押圧して、屈曲状態で曲がり癖が付いたヒンジ19cを伸ばし、蓋を完全に開く。蓋が完全に開いている状態とは、容器本体部19aの開口の上部が蓋部19bに覆われていない状態を指す。
【0077】
第一ロボットハンド60Lによってマイクロチューブ19の蓋を開ける動作と平行して、ロボット40は、第二ロボットハンド60Rを、CO2インキュベータ11の前まで移動させる。このとき、ロボット40は、一対のビット64の姿勢を、把持部材73の先端(突出端)が下向きとなる姿勢にする。
CO2インキュベータ11の開口シャッタ11aは、第二ロボットハンド60Rが開口シャッタの前に配置されたときにロボット40から発せられる所定の信号に基づいて開放される。
【0078】
図15に示すように、ロボット40は、第二ロボットハンド60Rのグリッパ61によって一対のビット64を開動作させる。このとき、グリッパ61は、グリッパ61の稼働範囲として設定された最大値まで一対のビット64を開く。また、ロボット40は、4つの把持部材73が培養容器18の外周を囲む位置となるように一対のビット64を配置し、培養容器18が載置されている面に4つの把持部材73の先端が接するまで第二ロボットハンド60Rを下降させる。養容器が載置されている面に4つの把持部材73の先端が接する状態で、ロボット40は、グリッパ61によって一対のビット64を閉動作させる。一対のビット64が閉動作されると、一対のビット64に設けられた4つの把持部材73の先端は、培養容器18の底の外周に接し、培養容器18の底部の外周を保持する。さらに、把持部材73の先端よりも基端側(一対のビット64との取付部側)では、把持部材73の外周面によって培養容器18の外周面が保持される。
【0079】
ロボット40は、第二ロボットハンド60Rの一対のビット64によって培養容器18が把持された状態で、CO2インキュベータ11の開口シャッタ11aを通じて培養容器18を取り出す。CO2インキュベータ11の開口シャッタ11aを通じて培養容器18が取り出されたときには、第一ロボットハンド60Lを用いてマイクロチューブ19の蓋を開ける動作は終了している。
【0080】
図16に示すように、ロボット40は、第一ロボットハンド60Lの一対のビット64に設けられた把持部材73の先端が上側を向くように、第一ロボットハンド60Lの姿勢を制御する。さらに、ロボット40は、第二ロボットハンド60Rによって把持されている培養容器18の大きさよりも僅かに大きく第一ロボットハンド60Lの一対のビット64を開く。
【0081】
続いて、第二ロボットハンド60Rは、第一ロボットハンド60Lに設けられた把持部材73の内側に培養容器18を載置する。第一ロボットハンド60Lは、培養容器18が載置された後、グリッパ61によって一対のビット64を閉動作させ、培養容器18を把持する。これにより、第一ロボットハンド60Lは、培養容器18の開口が上に向けられた状態で培養容器18の底面を支持しつつ培養容器18を把持する。培養容器18の底面が支持されている状態なので、培養容器18の開口を通じて器具等を培養容器18内に挿入するのが容易となる。
【0082】
(ステップS2:培養液の除去)
CO2インキュベータ11内から取り出された培養容器18内には、培養細胞と、培養細胞に栄養を供給するための培養液とが入っている。
ロボット40は、第一ロボットハンド60Lによって培養容器18を把持し、第二ロボットハンド60Rは何も把持していない状態となっている。また、第一ロボット40は、培養容器18の底面を傾斜させ、培養容器18内の培養液を容器の一部に移動させる。
【0083】
ロボット40は、第二ロボットハンド60Rによって、トラップ28から伸びる管路部材28aを把持する。ロボット40は、使い捨てのアスピレーティングチップを管路部材28aの端部に差し込んで、管路部材28aにアスピレーティングチップを取り付ける。続いて、ロボット40は、トラップ28内に負圧を生じさせるために、アスピレーターの駆動を開始させる信号をアスピレーターに出力する。なお、アスピレーターは常時駆動されていても構わない。
【0084】
ロボット40は、第二ロボットハンド60Rを第一ロボットハンド60Lの上まで移動させ、管路部材28aの先端に取り付けられたアスピレーティングチップの先端を、培養容器18内で培養液が貯留されている部分(傾斜された培養容器18の最下端)に差し入れる。
これにより、培養容器18内の培養液は、管路部材28aを通じてトラップ28内へ廃棄される。
【0085】
ロボット40は、所定時間だけアスピレーティングチップの先端を培養容器18の最下端に差し入れて保持し、所定時間の経過後に、アスピレーティングチップを培養容器18から引き抜く。さらに、ロボット40は、アスピレーティングチップの先端が上に向くように第二ロボットハンド60Rを回動させ、管路部材28a内に残っている培養液をトラップ28へと移動させる。その後、ロボット40は、第二ロボットハンド60Rによって把持されている管路部材28aを元の位置に戻す。
【0086】
(ステップS3:細胞回収液の添加)
ロボット40は、培養液が除去された培養容器18を第一ロボットハンド60Lによって把持し、第二ロボットハンド60Rは何も把持していない状態となっている。また、第一ロボット40は、培養容器18の底面を水平状態とする。
【0087】
図1及び図17に示すように、ロボット40は、第二ロボットハンド60Rを、試薬保管ブロック27まで移動させる。さらに、ロボット40は、第二ロボットハンド60Rの一対のビット64の長手軸線X1が鉛直方向に向くように第二ロボットハンド60Rの姿勢を制御する。さらに、細胞回収液が収容された蓋付き容器26の蓋の外周面を、第二ロボットハンド60Rの一対のビット64の爪部71によって把持する。さらに、ロボット40は、第二ロボットハンド60Rを載置台27Aまで移動させ、蓋付き容器26の蓋を載置台27Aに載せる。
【0088】
続いて、ロボット40は、第二ロボットハンド60Rによって、マイクロピペッター22のアダプタ22bを把持し、ピペッターラック30からマイクロピペッター22を取り外す。さらに、ピペットチップ20をマイクロピペッター22に取り付ける。
【0089】
続いて、図18に示すように、ロボット40は、蓋が外された蓋付き容器26の開口の上部まで第二ロボットハンド60Rを移動させる。このとき、ロボット40は、ピペットチップ20の先端が下向きとなるようにマイクロピペッター22を立てた状態で、第二ロボットハンド60Rによりマイクロピペッター22を保持している。
【0090】
ピペットチップ20が蓋付き容器26の開口の上部まで移動されたら、培養容器18を保持した状態の第一ロボットハンド60Lを第二ロボットハンド60Rの上方へ移動させる。その後、第一ロボットハンド60Lを下降させ、マイクロピペッター22のプッシュロッドを第一ロボットハンド60Lの外面の一部によって押圧する。
【0091】
本実施形態では、手作業で液体の定量操作をするためのマイクロピペッター22と同一のマイクロピペッター22が採用されており、プッシュロッドには、軽い動作で進退動作可能な第一領域と、第一領域よりも動作に力を要する第二領域とが設定されている。ロボット40は、プッシュロッドを、第一領域と第二領域との境界(第一ストップ位置)まで押圧する。
【0092】
その後、ロボット40は、第一ロボットハンド60Lと第二ロボットハンド60Rとの相対位置が固定された状態を維持しつつ、第一ロボットハンド60L及び第二ロボットハンド60Rを下降させる。ピペットチップ20の先端が細胞回収液の液面より僅かに下となる位置で、ロボット40は第一ロボットハンド60L及び第二ロボットハンド60Rを停止させ、その後、第一ロボットハンド60Lのみを上昇させる。これにより、プッシュロッドが上昇し、ピペットチップ20内に細胞回収液が吸引される。
【0093】
ピペットチップ20内に細胞回収液が吸引された後、図19に示すように、ロボット40は、第一ロボットハンド60Lと第二ロボットハンド60Rとを、第二ロボットハンド60Rが第一ロボットハンド60Lの上方になるように相対移動させる。このとき、ピペットは立てられた向きで保持され、ピペットチップ20の先端が培養容器18の培養面18aに向けられた状態とされる。
【0094】
ロボット40は、第一ロボットハンド60Lと第二ロボットハンド60Rとの相対位置が固定された状態で、第一ロボットハンド60L及び第二ロボットハンド60Rを、吸引吐出用治具31の下方へ移動させる。さらに、ロボット40は、第一ロボットハンド60L及び第二ロボットハンド60Rを上昇させてプッシュロッドを吸引吐出用治具31に接触させ、プッシュロッドを押してピペットチップ20内の細胞回収液を培養容器18内に吐出させる。第一ロボットハンド60Lと第二ロボットハンド60Rとの相対位置が固定された状態で細胞回収液を吐出させるので、細胞回収液を吐出している間、培養容器18の培養面18aとピペットチップ20の先端との距離は一定に保たれている。
【0095】
細胞回収液が培養容器18内に吐出されたら、図20に示すように第二ロボットハンド60Rはイジェクト用治具32の下へと移動され、第二ロボットハンド60Rが移動されることによって、マイクロピペッター22のイジェクトボタン22cがイジェクト用治具32に押される。これにより、マイクロピペッター22からピペットチップ20が外れ、廃棄容器29(図1参照)内に落下する。
【0096】
さらに、ロボット40は、第二ロボットハンド60Rによってピペットチップ20を外している動作と平行して、第一ロボットハンド60Lを水平面内で旋回動作させ、培養容器18内に吐出された細胞回収液を培養面18aに広げる。なお、ロボット40は、細胞回収液を培養面18aに広げるステップにおいて、培養面18aを僅かに傾斜させるように第一ロボットハンド60Lを傾斜させつつ旋回させてもよい。
【0097】
ピペットチップ20を外すステップが終了した後、第二ロボットハンド60Rは、マイクロピペッター22を元の位置に戻す。
【0098】
(ステップS4:細胞のかきとり)
ロボット40は、細胞回収液が入っている培養容器18を第一ロボットハンド60Lによって把持し、第二ロボットハンド60Rは何も把持していない状態となっている。また、第一ロボットハンド60Lは、培養面18a上の細胞が乾燥するのを防止するために、培養容器18の底面を水平状態とする。
【0099】
図21に示すように、第二ロボットハンド60Rは、スタンド23に保持されたセルスクレーパー21を把持し、第一ロボットハンド60Lに把持された培養容器18の培養面18aにブレード21aを接触させる。このとき、第一ロボットハンド60Lは、培養容器18の培養面18aを水平状態から一方向に傾ける。
【0100】
細胞をかきとる動作を開始するときの第一腕部45L及び第二腕部45Rの初期位置は、培養面18aの中央を回転中心として培養容器18を回転させることができる可動範囲が残る姿勢で第一腕部45Lが培養容器18を保持し、培養面18aの中央部を回転中心としてセルスクレーパー21を回転させることができる可動範囲が残る姿勢で第二腕部45Rがセルスクレーパー21を保持する位置関係となる。さらに、第一腕部45L及び第二腕部45Rの初期位置は、培養面18aの中央部を回転中心として培養容器18に対してセルスクレーパー21が360度相対回転することができるように設定される。
【0101】
細胞のかきとり動作の詳細について図22を参照して説明する。
図22に示すように、第一腕部45L及び第二腕部45R(図2参照)は、まず、培養面18aにおいて培養面18aの中央から離間した一箇所P1にブレード21aを接触させる。このときのブレード21aの向きは、培養面18aの中央と前記一箇所とを結ぶ直線と交差する方向にブレード21aの長手方向が向く向きとなっている。ブレード21aは培養面18aに押し付けられ、ブレード21aは僅かに弾性変形して培養面18aと密着される。
【0102】
続いて、前記一箇所において培養面18aに接触されたブレード21aを、前記一箇所から培養面18aの中央を通って反対側まで培養面18aに沿って移動させる。これにより、培養面18aの中央部分に付着している細胞がブレード21aによってかきとられる。また、培養面18aの中央部分の細胞をかきとるステップでは、傾けられた培養容器18の上側から下側へ向ってブレード21aを移動させて細胞をかきとる。これにより、ブレード21aによってかきとられた細胞は、細胞回収液とともに培養容器18の下端に集められる。
【0103】
さらに、培養面18aの中央部分に付着している細胞がかきとられた状態で、第一腕部45L及び第二腕部45Rは、ブレード21aの長手方向の延長線上であってブレード21aの長手方向の両端のうちの一方若しくは両端よりも外側の一点(符号P2で示す)を回転軸として、ブレード21aの両端のうち回転軸となる一点から遠い側の端P3が培養面18aの外縁に位置するまでブレード21aを回転させる。これにより、培養面18aに沿って移動されるブレード21aの進行方向がブレード21a上の何れの位置でも反転することなく、ブレード21aが捻られるような外力をかけることなくブレード21aの向きを変えることができる。
【0104】
続いて、ブレード21aの回転軸となる上記一点から遠い側のブレード21aの端P3を培養面18aの外縁に沿わせた状態で、培養面18aにブレード21aが接触された状態を維持しつつ、ブレード21aを培養面18aに対して相対移動させる。このとき、第一腕部45Lは、ブレード21aを培養面18a上で移動させているときには、培養容器18内にある細胞回収液と細胞との混合物(細胞懸濁液)が培養容器18の一部に集積されるように、培養容器18の傾斜状態を順次変更する。具体的には、培養面18aから剥離された培養細胞を含む細胞懸濁液が、培養容器18に対するブレード21aの移動方向の前方に位置するように、培養容器18の傾斜状態が変更される。このとき、培養面18aに沿ってブレード21aを移動させる動作も同時に行なわれており、第一腕部45Lと第二腕部45Rとは、培養容器18及びセルスクレーパー21の相対位置が三次元的に相対移動するように協調動作される。
【0105】
ブレード21aが培養面18aの外縁に沿って360度回転動作された後、第二ロボットハンド60Rは、セルスクレーパー21を回転させて、セルスクレーパー21の進行方向前方にある細胞を、傾斜された培養容器18の最下端に回収する。その後、第二ロボットハンド60Rは、セルスクレーパー21を廃棄容器29に廃棄する。
【0106】
(ステップS5:細胞の回収)
ロボット40は、細胞回収液が入っている培養容器18を第一ロボットハンド60Lによって把持し、第二ロボットハンド60Rは何も把持していない状態となっている。また、第一ロボットハンド60Lは、細胞のかきとりが終了したときの培養容器18の位置から培養容器18の位置関係を変えることなく、培養容器18の一箇所に細胞懸濁液を保持している。
【0107】
第二ロボットハンド60Rは、上記ステップS3と同様に、マイクロピペッター22を把持して新たなピペットチップ20をマイクロピペッター22に取り付ける。さらに、ピペットチップ20の先端が培養面18aに向けれた状態となるように、第一ロボットハンド60Lの上方に第二ロボットハンド60Rを移動させる。
【0108】
さらに、ロボット40は、第一ロボットハンド60Lと第二ロボットハンド60Rとを、吸引吐出用治具31の下へと移動させる(図19参照)。第一ロボットハンド60Lと第二ロボットハンド60Rとが吸引吐出用治具31の下へと到着した後、ロボット40は、第二ロボットハンド60Rを上昇させ、マイクロピペッター22のプッシュロッドを上記第一ストップ位置まで押し下げる。その後、第一ロボットハンド60Lを上昇させ、細胞懸濁液内にピペットチップ20の先端を差し入れる。ピペットチップ20の先端は、傾斜された培養容器18の最下端に位置決めされる。ロボット40は、第一ロボットハンド60Lと第二ロボットハンド60Rとの相対位置が固定された状態で第一ロボットハンド60Lと第二ロボットハンド60Rとを下降させる。これにより、プッシュロッドを押圧していた吸引吐出用治具31はプッシュロッドから離間し、ピペットチップ20内には細胞懸濁液が吸引される。
【0109】
ロボット40は、第二ロボットハンド60Rを、作業用のチューブラック24Aに配置されたマイクロチューブ19の開口の上方へと移動させる。さらに、マイクロチューブ19の容器本体部19a内にピペットチップ20を差し入れる。本実施形態では、マイクロチューブ19の容器本体部19aにピペットチップ20を差し入れる動作において、まず、マイクロピペッター22を垂直に立てた状態でマイクロピペッター22を下降させ、マイクロチューブ19の容器本体部19a内にピペットチップ20の先端を挿入する。その後、マイクロピペッター22が垂直軸からわずかに傾斜するように第二ロボットハンド60Rを傾斜させる。これにより、ピペットチップ20の先端は容器本体部19aの内側の側面へと向けられる。
【0110】
ロボット40は、上記ステップS3と同様の手順によって、第一ロボットハンド60Lの一部によってプッシュロッドを押圧し、細胞懸濁液をピペットチップ20から吐出させる。ピペットチップ20から吐出された細胞懸濁液は、容器本体部19aの内面に沿って容器本体部19aの底へと流れ込む。
【0111】
ロボット40は、第二ロボットハンド60Rのグリッパ61に連結された一対のビット64を、蓋が開けられた状態のマイクロチューブ19に当接させ、一対のビット64によって蓋部19bを押圧してマイクロチューブ19のヒンジ19cを湾曲させる。さらに、一対のビット64によって蓋部19bを押圧して容器本体部19a内に蓋部19bを押し込む。
これにより、マイクロチューブ19の蓋が閉められる。
【0112】
なお、第二ロボットハンド60Rによってマイクロチューブ19の蓋が閉められるのと平行して、第一ロボットハンド60Lは、廃棄容器29の上に移動され、廃棄容器29の上で、把持部材73の先端が下に向けられるように第一ロボットハンド60Lが回転され、さらにグリッパ61によって一対のビット64が開動作される。これにより、培養容器18は、廃棄容器29内に落下する。
【0113】
(ステップS6:細胞の分離)
ロボット40は、第一ロボットハンド60L、第二ロボットハンド60Rともに何も把持していない状態となっている。
ロボット40は、第一ロボットハンド60Lと第二ロボットハンド60Rとの何れか一方(本実施形態では第一ロボットハンド60L)によって、マイクロチューブ19を把持する。このとき、ロボット40は、第一ロボットハンド60Lの長手軸線X1が鉛直方向を向き一対のビット64の先端が下を向くように第一ロボットハンド60Lの姿勢を制御する。また、ロボット40は、細胞懸濁液が内部に収容されたマイクロチューブ19の上に一対のビット64が位置するように第一ロボットハンド60Lの位置を移動させる。さらに、ロボット40は、第一ロボットハンド60Lのグリッパ61によって一対のビット64を開動作させてから、矩形凹部70の高さがマイクロチューブ19の蓋部19b及びフランジ部19dの高さと一致するまで第一ロボットハンド60Lを下降させる。
【0114】
矩形凹部70の高さがマイクロチューブ19の蓋部19b及びフランジ部19dの高さと一致している状態で、ロボット40はグリッパ61により一対のビット64を閉じる。これにより、マイクロチューブ19は、爪部71によって容器本体部19aの外周面が保持された状態で一対のビット64によって把持される。
【0115】
ロボット40は、作業用のチューブラック24Aからマイクロチューブ19を引き抜くように第一ロボットハンド60Lを上昇させ、胴部41の旋回部44を固定部42に対して回動させて、旋回部44の正面を遠心機14へ向ける。旋回部44の正面が遠心機14に向けられている状態では、ロボット40の第一腕部45L及び第二腕部45Rはともに遠心機14を操作しやすい位置関係になる。
【0116】
ロボット40は、マイクロチューブ19を把持している第一腕部45L以外の腕部(第二腕部45R)によって、遠心機14の蓋を開ける。本実施形態では、遠心機14の蓋は、ヒンジによって遠心機14の本体と連結された蓋である。ロボット40は、遠心機14の蓋の上面を第二ロボットハンド60Rの一対のビット64によって押下して、蓋のロックを解除する。さらに、第二ロボットハンド60Rの把持部材73の一部を遠心機14の蓋の下面に係合させ、第二ロボットハンド60Rを上昇させて遠心機14の蓋を開ける。第二ロボットハンド60Rは、蓋が開くときの蓋の軌跡に沿って蓋を移動させる。
【0117】
本実施形態では、遠心機14のローターには、細胞懸濁液が収容されたマイクロチューブ19の重量と略等しいバランスチューブが予め取り付けられている。ロボット40は、第二ロボットハンド60Rに取り付けられたレーザーセンサ63により、ローター内におけるバランスチューブの位置を検出する。バランスチューブの位置が検出されたら、第二ロボットハンド60Rによって、ローター若しくはバランスチューブを把持して、バランスチューブが遠心機14の正面側に位置するようにローターを回転移動させる。
【0118】
第一ロボットハンド60Lは、回転軸を間に挟んでバランスチューブと反対側に、第一ロボットハンド60Lによって把持されたマイクロチューブ19を取り付ける。本実施形態では、マイクロチューブ19を取り付ける部分が遠心機14の奥側となるようにローターを回転させるので、アングルローター式の遠心機14であっても、第一ロボットハンド60Lによってマイクロチューブ19をローターに取り付けやすい。
【0119】
ロボット40は、第二ロボットハンド60Rを用いて、遠心機14の蓋を開けたときの動作とは逆順で遠心機14の蓋を閉め、遠心機14の回転数及び動作時間を決定するボタンに対して所定の値の入力し、遠心機14の動作を開始させる。本実施形態では、ロボット40は、遠心機14の制御パネルに設けられた押しボタンスイッチを押すことによって入力を行なうようになっている。
【0120】
遠心機14の動作が停止したら、ロボット40は、再び第二ロボットハンド60Rを用いて遠心機14の蓋を開ける。続いて、ロボット40は、第二ロボットハンド60Rに取り付けられたレーザーセンサ63により、ローター内におけるバランスチューブの位置を検出する。バランスチューブの位置が検出されたら、マイクロチューブ19をローターに取り付ける際の上記動作と同様にバランスチューブを正面側へと移動させ、細胞懸濁液が収容されたマイクロチューブ19を第一ロボットハンド60Lの一対のビット64によって把持する。
【0121】
このとき、図23に示すように、第一ロボットハンド60Lは、一対のビット64の爪部71がマイクロチューブ19の蓋部19bおよびフランジ部19dの外周面に当接するようにしてマイクロチューブ19を把持する。これは、本実施形態で例示する遠心機14のローターが、マイクロチューブ19のうち蓋部19b、ヒンジ19c、及びフランジ部19dを除いた全てがローター内に入り込む孔によってマイクロチューブ19を保持してるので、一動作で容器本体部19aの外周面を把持するのが難しいことが理由である。
【0122】
一対のビット64の爪部71によってマイクロチューブ19の蓋部19bおよびフランジ部19dの外周面が把持された状態で、胴部41の旋回部44は固定部42に対して旋回されて再び作業台35に向けられる。
遠心機14による処理後のマイクロチューブ19内は、細胞のペレットが底部に張り付き、細胞回収液が細胞のペレットに重層された状態となっている。
【0123】
ロボット40は、第一ロボットハンド60Lを移動させ、細胞のペレットを有するマイクロチューブ19を作業用のチューブラック24Aに載置する。さらに、上述のステップS1と同様の手順により、マイクロチューブ19の蓋を開ける。その後、上記ステップS5と同様の手順により、吸引吐出用治具31を使用して、マイクロチューブ19内の細胞回収液を回収して、ピペットチップ20とともに廃棄容器29に廃棄する。
【0124】
(ステップS7:細胞溶解液の添加)
ロボット40は、細胞のペレットが収容され蓋が開いた状態のマイクロチューブ19が第一ロボットハンド60Lによって把持され、マイクロピペッター22が第二ロボットハンド60Rに把持された状態となっている。
ロボット40は、試薬保管ブロック27において細胞溶解液が収容された蓋付き容器26の蓋を上記ステップS3で説明したのと同様の動作により開け、細胞溶解液をピペットチップ20内に吸引し、ピペットチップ20内に吸引された細胞溶解液をマイクロチューブ19内に吐出させる。さらに、ロボット40は、マイクロチューブ19を作業用のチューブラック24Aに載置し、上記ステップS5で説明したのと同様の動作によってマイクロチューブ19の蓋を閉める。
【0125】
(ステップS8:試料の攪拌)
ロボット40は、細胞のペレット及び細胞溶解液が収容され蓋が閉じられた状態のマイクロチューブ19が第一ロボットハンド60Lによって把持された状態となっている。第二ロボット40の状態については特に限定されない。
【0126】
ロボット40は、上記ステップS6で説明したのと同様の動作により、マイクロチューブ19の蓋部19bおよびフランジ部19dが矩形凹部70内に入り込む位置関係で、第一ロボットハンド60Lの一対のビット64によってマイクロチューブ19を保持する。
【0127】
このとき、上記ステップS6における動作とは異なり、第一ロボット40の一対のビット64は、容器本体部19aの外周面を爪部71が押圧している状態よりもわずかに開いた状態でマイクロチューブ19を保持している。さらに、一対のビット64は、蓋部19bの厚さ方向にわずかにクリアランスが残るように矩形凹部70の寸法が設定されている。このため、一対のビット64に保持されたマイクロチューブ19は、蓋部19b及びフランジ部19dの近傍を支点として揺動可能となっている。
【0128】
ロボット40は、第一ロボットハンド60Lをミキサー15(ボルテックスミキサー15(登録商標))の上まで移動させ、マイクロチューブ19の底が下になる状態で第一ロボットハンド60Lを下降させる。マイクロチューブ19の底がミキサー15に接触するとミキサー15のスイッチが入り、マイクロチューブ19内の細胞ペレット及び細胞溶解液は攪拌される。
【0129】
(ステップS9:アルミブロック恒温槽による静置)
ロボット40は、細胞のペレット及び細胞溶解液が収容され蓋が閉じられた状態のマイクロチューブ19が第一ロボットハンド60Lによって把持された状態となっている。なお、第二ロボットハンド60Rは何も把持していない状態となっている。
【0130】
ミキサー15によって攪拌されたマイクロチューブ19は、第一ロボットハンド60Lによって保持されている。この状態で、胴部41の旋回部44が固定部42に対して旋回し、旋回部44の正面がアルミブロック恒温槽16に向けられる。ロボット40は、第二ロボットハンド60Rによってアルミブロック恒温槽16の蓋を把持して当該蓋を開ける。
【0131】
アルミブロック恒温槽16の蓋が開けられたら、第一ロボットハンド60Lが移動され、第一ロボットハンド60Lに把持されたマイクロチューブ19がアルミブロックに取り付けられる。
ロボット40は、アルミブロック恒温槽16の蓋を開ける手順と逆順で蓋を閉め、細胞溶解液に溶解された細胞ペレットを、所定の温度で所定時間だけ静置する。
【0132】
所定時間が経過した後、ロボット40は、アルミブロック恒温槽16の蓋を再び開け、第一ロボットハンド60Lの爪部71によってマイクロチューブ19の蓋部19bおよびフランジ部19dの外周面を把持し、マイクロチューブ19を作業用のチューブラック24Aに載置する。
【0133】
(ステップS10:細胞残滓の除去及び磁性体ビーズの添加)
ロボット40は、アルミブロック恒温槽16によって冷却された細胞のペレット及び細胞溶解液が収容されたマイクロチューブ19が第一ロボットハンド60Lによって把持された状態となっている。なお、第二ロボットハンド60Rは何も把持していない状態となっている。
【0134】
細胞残滓の除去は、アルミブロック恒温槽16によって冷却された細胞のペレット及び細胞溶解液が収容されたマイクロチューブ19を遠心分離(上記ステップS6参照)し、マイクロチューブ19内の上清をマイクロピペッター22を用いて回収(上記ステップS5参照)することにより行なわれる。細胞残滓は、上清を取り終えたマイクロチューブ19の底にペレット状になっており、マイクロチューブ19ごと廃棄容器29に廃棄される。
【0135】
磁性体ビーズの添加は、回収された上清を、磁性体ビーズが収容されたマイクロチューブ19内に吐出することにより行なわれる。なお、磁性体ビーズが収容されたマイクロチューブ19は、アルミブロック恒温槽16内に保管されているものを取り出して利用することができる。
【0136】
(ステップS11:試料とビーズとの混和)
ロボット40は、第一ロボットハンド60L及び第二ロボットハンド60Rが何も把持していない状態となっている。
ロボット40は、作業用のチューブラック24Aに載置されたマイクロチューブ19を、第二ロボットハンド60Rの一対のビット64によって上から把持する(上記ステップS6参照)。さらに、第二ロボットハンド60Rによって把持されたマイクロチューブ19は第一ロボットハンド60Lに受け渡される。具体的には、図24に示すように、第二ロボットハンド60Rによって蓋部19b及びフランジ部19dの近傍が把持されたマイクロチューブ19は、第一ロボットハンド60Lの一対のビット64によって、対向する矩形凹部70の間に容器本体部19aの外周面が挟まれるように把持される。
【0137】
次に、ロボット40は、旋回部44の正面が保冷庫12に向くように、固定部42に対して旋回部44を旋回動作させる。なお、ロボット40は、第二ロボットハンド60Rから第一ロボットハンド60Lへのマイクロチューブ19の受け渡しをしながら旋回部44が旋回されるようになっていてもよい。
【0138】
次に、ロボット40は、保冷庫12のドアを第二ロボットハンド60Rを用いて移動させ、保冷庫12内に配置されたローテータ13にマイクロチューブ19を取り付ける。ローテータ13は、ロボット40が発する駆動信号によって電源が入り、チューブ取付部13aが回転するようになっている。
ロボット40は、チューブ取付部13aを回転させ、又は第一ロボットハンド60Lを回転させるとともに、レーザーセンサ63によってチューブ取付部13a上のカラーマーカーを検出することにより、チューブ取付部13aを所定の初期位置にセットし、初期位置にセットされたチューブ取り付け部にマイクロチューブ19を取り付ける。
【0139】
その後、ロボット40は、第二ロボットハンド60Rを用いて保冷庫12のドアを閉め、ローテータ13を回転させる駆動信号を発する。これにより、上清と磁性体ビーズとはローテータ13によって混合される。
ローテータ13によって所定の時間だけ混合操作がなされたら、ロボット40によって、ローテータ13が停止され、第一ロボットハンド60L若しくは第二ロボットハンド60Rによって、取り付け時とは逆順でチューブ取付部13aからマイクロチューブ19が取り外される。さらに、マイクロチューブ19は、作業用のチューブラック24Aに載置される。
【0140】
(ステップS12:ビーズの洗浄)
ロボット40は、ローテータ13から取り外されて作業用のチューブラック24Aに載置されたマイクロチューブ19の蓋を開け(上記ステップS1参照)、作業台35に設けられた磁石25までマイクロチューブ19を搬送し、当該マイクロチューブ19を磁石25に取り付ける。これにより、磁性体ビーズは磁石25に吸着される。
【0141】
ロボット40は、第二ロボットハンド60Rによってマイクロピペッター22を把持し、第一ロボットハンド60Lによってプッシュロッドを操作することにより、マイクロチューブ19内の液体を吸引して液体を廃棄する。さらに、蓋付き容器26内に収容された洗浄液をマイクロピペッター22を用いてマイクロチューブ19内に加える。
【0142】
その後、ロボット40は、マイクロチューブ19の蓋を閉め(上記ステップS5参照。)、第一ロボットハンド60Lによって磁石25からマイクロチューブ19を取り外して保持する。その後、第一腕部45Lを動作させることにより、第一ロボットハンド60Lを上下反転させる動作を複数回繰り返し、第一ロボットハンド60Lに保持されたマイクロチューブ19内の洗浄液と磁性体ビーズとを転倒混和する。
【0143】
ステップS12においては、たとえば洗浄液による洗浄操作を複数回(たとえば3回)繰り返すことが好ましい。これにより、磁性体ビーズは洗浄液によって洗浄される。
最後の洗浄操作の後、磁石25によって磁性体ビーズを吸着させた状態で、ロボット40によってマイクロピペッター22を操作して洗浄液を除去する。
【0144】
(ステップS13:タンパク質の溶出)
ロボット40は、上記ステップS12において洗浄液が除去されたビーズに、溶出液を添加する。本実施形態では、溶出液は、アルミブロック恒温槽16内に配置されたマイクロチューブ19内に配置されており、ロボット40は、マイクロチューブ19の蓋を開け、マイクロチューブ19内の溶出液をピペットチップ20内に吸引して用いる(上記ステップS1及びステップS3参照)。
溶出液が添加された後、ロボット40はマイクロチューブ19の蓋を閉め(上記ステップS5参照)、ミキサー15により攪拌する(上記ステップS8参照)。さらに、ロボット40は、ミキサー15による攪拌操作がなされたマイクロチューブ19を、アルミブロック恒温槽16に取り付けて、所定時間だけ静置する(上記ステップS9参照)。
ステップS13では、磁性体ビーズの抗体からタンパク質が外れ、溶出液中に溶出される。
【0145】
(ステップS14:ビーズの除去及びタンパク質の回収)
ステップS14では、マイクロチューブ19を磁石25に取り付け、上記ステップS13においてタンパク質が溶出された溶出液をマイクロピペッター22を使用して回収し、新たなマイクロチューブ19へと溶出液を移す。これで、磁性体ビーズと溶出液とが分離される。
【0146】
ロボット40は、磁性体ビーズから分離された溶出液が収容されたマイクロチューブ19に、タンパク質を沈殿させるための所定の試薬を加え、アルミブロック恒温槽16によって所定の時間だけ冷却状態で静置し(上記ステップS9参照)、冷却された溶出液が収容されたマイクロチューブ19を遠心機14に取り付けて遠心分離する(上記ステップS6参照)。遠心分離されることにより、溶出液中のタンパク質はペレットとしてマイクロチューブ19の底に集められる。
【0147】
(ステップS15:上清の廃棄およびペレットの洗浄)
ステップS15では、ロボット40は、第二ロボットハンド60Rによってマイクロピペッター22を把持し、第一ロボットハンド60Lでマイクロチューブ19を把持し、マイクロピペッター22を用いてマイクロチューブ19内の上清を廃棄する。
続いて、上記ステップS12にて使用された洗浄液とは組成が異なる他の洗浄液を、マイクロチューブ19に加える。その後、第一腕部45Lによって第一ロボットハンド60Lを反転させて、洗浄液とペレットとを転倒混和する。
その後、マイクロチューブ19を遠心機14に取り付けてペレットを再びマイクロチューブ19の底に沈殿させる(上記ステップS6参照)。
その後、洗浄液を除去し、ペレットを溶解させる再溶解液をマイクロチューブ19に加え、マイクロチューブ用シェーカー17にマイクロチューブ19を取り付けてペレットと再溶解液とを混合させる。
ステップS15により、ペレットが再溶解液に溶解された再溶解試料が生じる。
【0148】
(ステップS16:酵素消化)
ステップS15では、ロボット40は、マイクロチューブ用シェーカー17からマイクロチューブ19を取り出し、タンパク質を分解する所定の酵素液をマイクロチューブ19に加える。
その後、ミキサー15によって酵素液と再溶解試料とを混合し(上記ステップS8参照)、遠心機14によって飛沫をマイクロチューブ19の底部に回収し(上記ステップS6参照)、試薬保管ブロック27若しくはCO2インキュベータ11内など、所定の温度に設定された機器によって所定温度で静置する。
以上の各ステップによって、質量分析に使用される分析用試料が精製される。
【0149】
以上説明したように、本実施形態の液体処理システム1及び液体処理方法によれば、複数の腕部(第一腕部45L及び第二腕部45R)を有するロボット40を用いて理化学機器10を操作するので、多数のロボット40をシステム内に備えるシステムと比較して構成を簡素にすることができる。
【0150】
また、本実施形態の液体処理システム1は、液体の処理に用いられる全ての理化学機器10が第一ロボットハンド60Lと第二ロボットハンド60Rとの双方の可動範囲内に配置されているので、一台のロボット40によって一連の処理を行うことができる。
【0151】
また、第一ロボットハンド60Lと第二ロボットハンド60Rとが同形なので、ロボットハンド60の左右によらず同じ処理ができる。このため、旋回部44を旋回させる範囲に制限が生じるような狭い作業空間においても好適に処理を行うことができる。
【0152】
また、本実施形態の液体処理システム1は、従来手作業で行っていた分析用試料の調製を、人手で行なうのと同様の理化学機器10を用いて自動化することができる。このため分析用試料を調製するだけのために専用の理化学機器を設計して採用する場合と比較して、システムを安価に構築することができる。
【0153】
また、アダプタ22bを設ける程度で一般的な理化学機器10を用いたシステムを構築することができ、人間と同等の自由度を有するロボット40によって各理化学機器10を制御できるので、手作業を想定して考案されたプロトコール(作業手順)を容易に自動化することができる。また、論文等に記載されたとおりの機器構成やプロトコールに基づいたシステムを容易に構築することができる。
【0154】
また、本実施形態における細胞のかきとり動作では、セルスクレーパー21のブレード21aを培養面18aから離すことなく一筆書きにより細胞をかきとることができる。このため、細胞にかかる外力を最小限に抑えることができ、細胞を用いて精製された試料の品質を高めることができる。
【0155】
また、細胞のかきとり動作においてブレード21aの進行方向が反転することがないので、ブレード21aが捻れたりしてブレード21aと培養面18aとの間に隙間が生じる可能性を低く抑えることができる。これにより、細胞の回収率を安定させることができる。
【0156】
また、ブレード21aの進行方向の前方に細胞懸濁液を集めながら細胞をかきとるようにブレード21aが移動されるので、かきとられた細胞は直ちに液体中に分散する。このため、細胞の一部が乾いてしまう可能性を低く抑えることができ、作業ごとの細胞のコンディションのばらつきを低く抑えることができる。
【0157】
また、上述の細胞のかきとり動作のように手作業で行なう場合には無理な姿勢となる動作でも、ロボット40によれば無理なく繰り返し実行できるので、手作業によって作業を行なう場合と比較して高品質の分析用試料を再現性良く調製することができる。
【0158】
また、ロボット40の多関節アーム46が7自由度を有しているので、狭い空間内でロボットハンド60を容易に所望の姿勢にすることができる。その結果、理化学機器10が高い密度で配置された空間であってもロボット40を動作させることができ、システムを小型化することができる。また、ロボット40の胴部41の周囲で胴部41に近い位置でもロボットハンド60を好適に動作させることができるので、システム内のデッドスペースが少ない。
【0159】
また、本実施形態では、多関節アーム46が7自由度を有しているので、理化学機器10のレイアウトの一部が変更された場合でも、理化学機器10が占有する空間を避けてロボット40を動作させるためのティーチングが容易である。
【0160】
また、各ロボットハンド60に設けられた一対のビット64は、マイクロチューブ19を姿勢が異なる3通りの持ち方で把持することができる。このため、理化学機器10の形状に応じて最適な持ち方を選択することができる。また、マイクロチューブ19の蓋部19b及びフランジ部19dが矩形凹部70内に挿入された状態でマイクロチューブ19を把持した場合に、容器本体部19aをとの間に僅かな隙間を空けて緩く掴む持ち方をすることができるので、ミキサー15を使用した場合にマイクロチューブ19の内容物がよく攪拌される。
【0161】
また、マイクロチューブ19の蓋を開ける際に、ヒンジ19cに一対のビット64の一部を当接させているので、ヒンジ19cの弾力によって蓋部19bが開こうとするのを、ヒンジ19cに当接された一対のビット64によって支えることができる。これにより、蓋部19bが勢いよく開いてマイクロチューブ19が振動する可能性を低く抑え、マイクロチューブ19内に収容された試料に振動が伝わりにくくなる。その結果、高品質の分析用試料を再現性良く調製することができる。
【0162】
また、第一ロボットハンド60Lと第二ロボットハンド60Rとがいずれも一対のビット64を有しているので、第一ロボットハンド60Lと第二ロボットハンド60Rとの間でマイクロチューブ19の受け渡しをしてマイクロチューブ19の持ち方を変えることができる。これにより、マイクロチューブ19と一旦載置してから別の持ち方で掴みなおすよりも素早く持ち方を変えることができる。さらに、旋回部44を旋回動作させている間に持ち替えを完了させることもでき、異なる理化学機器10間でマイクロチューブ19を移載する処理速度が速い。
【0163】
また、4つの把持部材73によって培養容器18の底部の外周を保持することができるので、培養容器18の外周面を構成する壁部に大きな力がかからない。このため、培養容器18が変形したり割れたりするのを防止することができる。
なお、培養容器18の培養面18aが湾曲した状態で把持されていると、セルスクレーパー21のブレード21aと培養面18aとの密着状態が安定せずかきとり動作ごとに細胞の回収率や細胞のコンディションにばらつきが生じるおそれがある。これに対して、本実施形態では、培養容器18の底部の外周を把持部材73によって保持することにより、培養容器18の底部が湾曲するのを抑えることができ、細胞の回収率や細胞のコンディションを安定させることができる。
【0164】
また、本実施形態では、押蓋式のマイクロチューブの蓋部を開閉することができるので、スクリューキャップ式のマイクロチューブを必要とする場合よりも消耗品のコストが低い。
【0165】
以上、本発明の実施形態について図面を参照して詳述したが、具体的な構成はこの実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更等も含まれる。
たとえば、上述の実施形態では、ロボット40は、第一腕部45Lと第二腕部45Rとの2つの腕部を備えている例を示したが、3以上の腕部を同一の胴部41に備えるロボット40とすることもできる。この場合、一人の手作業では困難な処理をロボット40にさせることができる。
【0166】
上述の実施形態では、第一腕部45Lおよび第二腕部45Rは7自由度を有する多関節アーム46を備えている例を示したが、7自由度未満の自由度とすることもできる。この場合、各腕部の動作の制限は増えるが、ロボット40の構成をシンプルにすることができる。
また、上述の実施形態及び変形例において示した構成要素は適宜に組み合わせて構成することが可能である。
【符号の説明】
【0167】
1 液体処理システム
2 枠体
3 光学センサ
10 理化学機器
11 CO2インキュベータ
12 保冷庫
13 ローテータ
14 遠心機
15 ミキサー
16 アルミブロック恒温槽
17 マイクロチューブ用シェーカー
18 培養容器
18a 培養面
19 マイクロチューブ
19a 容器本体部
19b 蓋部
19c ヒンジ
19d フランジ部
20 ピペットチップ
21 セルスクレーパー
21a ブレード
21b 柄部
22 マイクロピペッター
22a 本体
22b アダプタ
22c イジェクトボタン
23 スタンド
24、24A チューブラック
25 磁石
26 蓋付き容器
27 試薬保管ブロック
27A 載置台
28 トラップ
28a 管路部材
29、29A 廃棄容器
30 ピペッターラック
31 吸引吐出用治具
32 イジェクト用治具
33 チップラック
35 作業台
40 ロボット
41 胴部
42 固定部
43 台座
43a 基底面
44 旋回部
45L 第一腕部
45R 第二腕部
46 多関節アーム
60 ロボットハンド
60L 第一ロボットハンド
60R 第二ロボットハンド
61 グリッパ
62 把持センサ
63 レーザーセンサ
64 一対のビット
65 第一ビット
66 本体部材
67 内側面
68 大径把持部
69 小径把持部
70 矩形凹部
71 爪部
72 突起部
73 把持部材
74 ビット
75 駆動手段
76 制御手段
【特許請求の範囲】
【請求項1】
液性の生物学的材料を処理する液体処理システムであって、
所定の作業空間内に設定された軸線回りに回動自在に設けられた胴部と、
前記胴部に設けられ少なくとも3自由度以上の自由度を有する第一腕部と、
前記胴部に設けられ少なくとも3自由度以上の自由度を有する第二腕部と、
前記胴部、前記第一腕部、及び前記第二腕部をそれぞれ動作させる駆動手段と、
前記作業空間内且つ前記第一腕部と前記第二腕部との少なくともいずれかの可動範囲内に配置された理化学機器と、
を備え、
前記理化学機器の位置及び形状に基づいたティーチングプレイバックにより前記駆動手段を動作させて前記理化学機器を用いた前記生物学的材料の処理をする
ことを特徴とする液体処理システム。
【請求項2】
請求項1に記載の液体処理システムであって、
前記第一腕部は前記理化学機器を取り扱うための第一ロボットハンドを備え、
前記第二腕部は前記理化学機器を取り扱うための第二ロボットハンドを備え、
前記理化学機器であって互いに異なる処理を行う複数の理化学機器が、前記第一ロボットハンドと前記第二ロボットハンドとの少なくともいずれかの可動範囲内に配置されていることを特徴とする液体処理システム。
【請求項3】
請求項2に記載の液体処理システムであって、
前記複数の理化学機器であって前記生物学的材料の処理のうち所定の手順に従って実行される処理に用いられる全ての理化学機器が前記第一ロボットハンドと前記第二ロボットハンドとの双方の可動範囲内に配置されていることを特徴とする液体処理システム。
【請求項4】
請求項2または請求項3に記載の液体処理システムであって、
前記第一ロボットハンドと前記第二ロボットハンドとの相対位置を検出し、前記第一腕部と前記第二腕部とを協調動作させる
ことを特徴とする液体処理システム。
【請求項5】
請求項2から請求項4のいずれか一項に記載の液体処理システムであって、
前記第一ロボットハンドと前記第二ロボットハンドとは同形であることを特徴とする液体処理システム。
【請求項6】
請求項2から請求項5のいずれか一項に記載の液体処理システムであって、
前記液体処理システムは、前記液性の生物学的材料として、付着性の培養細胞が懸濁された細胞懸濁液を調製するシステムであり、
前記理化学機器は、
前記培養細胞が培養される培養面を底部に有し上部が開口された培養容器と、
前記培養細胞を前記培養面からかきとるブレードが設けられたセルスクレーパーと、
を含み、
前記第一ロボットハンドは、前記開口が上に向けられた状態で前記培養容器を把持し、
前記第二ロボットハンドは、前記セルスクレーパーを把持し、
前記第一腕部及び前記第二腕部は、
前記培養面において前記培養面の中央から離間した一箇所に、前記中央と前記一箇所とを結ぶ直線と交差する方向に前記ブレードの長手方向が向くように、前記ブレードを接触させ、
前記一箇所において前記培養面に接触された前記ブレードを、前記一箇所から前記中央を通って反対側まで前記培養面に沿って移動させ、
前記反対側まで移動された前記ブレードを、前記ブレードの長手方向の延長線上であって前記ブレードの長手方向の両端よりも外側の一点を回転軸として、前記両端のうち前記一点から遠い側の端が前記培養面の外縁に位置するまで、前記培養面と前記ブレードとが接触された状態で、回転させ、
前記一点から遠い側の前記ブレードの端を前記外縁に沿わせた状態で、前記培養面に前記ブレードが接触された状態で前記ブレードを前記培養面に対して相対移動させる
ことを特徴とし、
さらに、
前記第一腕部は、
前記ブレードを前記培養面上で移動させているときには、前記培養容器内にある細胞懸濁液が前記培養容器の一部に集積されるように前記培養容器を傾斜させ、前記培養面から剥離された前記培養細胞を含む細胞懸濁液が前記培養容器に対する前記ブレードの移動方向の前方に位置するように、前記第二腕部と協調動作される
ことを特徴とする液体処理システム。
【請求項7】
請求項6に記載の液体処理システムであって、
前記第一ロボットハンドと前記第二ロボットハンドとのうち少なくとも前記第二ロボットハンドは、
開閉動作可能な一対のビットを有し、
前記一対のビットは、
前記培養容器の深さ方向における前記培養容器の外寸以上の長さを有する棒状の把持部材を4つ備え、
前記把持部材は、前記一対のビットの各々に、互いに平行に2つずつ配置されており、
各前記把持部材の先端は、同一の仮想平面内に存する
ことを特徴とし、
さらに、
前記第二ロボットハンドは、
前記培養容器の開口側から底部側へ向かって前記把持部材を移動させて前記培養容器の外周を囲むように前記把持部材を配置し、
前記一対のビットを閉じることにより、前記把持部材の先端によって前記培養容器の底部の外周を保持し、且つ前記先端よりも基端側の前記把持部材の外周面によって前記培養容器の外周面を保持する
ことを特徴とする液体処理システム。
【請求項8】
請求項2から請求項5のいずれか一項に記載の液体処理システムであって、
前記理化学機器は、
容器本体部、及び可撓性のヒンジによって前記容器本体部と連結された押蓋式の蓋部、を有するマイクロチューブと、
前記マイクロチューブの底部が差し込まれる孔を有して前記マイクロチューブを保持するチューブラックと、
を含み、
前記第一ロボットハンドと前記第二ロボットハンドとの少なくとも何れかは、前記蓋部が挿入される第一凹部を有するビットを備え、
前記第一腕部と前記第二腕部とのうち前記ビットを備える少なくとも一方は、
前記蓋部によって閉じられた状態で前記チューブラックに保持された前記マイクロチューブの前記蓋部のうち前記ヒンジの反対側に位置する部分を前記第一凹部に係止させて、前記ビットにおける前記第一凹部以外の一部を前記ヒンジに当接させ、前記ヒンジを支点として前記蓋部を前記容器本体部から引き抜き、
または、
前記容器本体部に対して前記蓋部が外れた状態で前記チューブラックに保持された前記マイクロチューブの前記蓋部を前記ビットによって押圧して前記ヒンジを湾曲させ、さらに前記蓋部の一部を前記ビットによって押圧して前記容器本体部内に押し込む
ことを特徴とする液体処理システム。
【請求項9】
請求項8に記載の液体処理システムであって、
前記ビットは、
前記第一凹部を有する第一ビットと、
前記第一凹部と同形の第二凹部を有し前記第一ビットに対して相対移動される第二ビットと、
を有し、
前記第一ビットと前記第二ビットとは、前記第一凹部と前記第二凹部とが各々の開口が正対するように対向配置され、
前記第一ビットと前記第二ビットとは、互いに離間する2点で前記マイクロチューブの容器本体部の外周面を支持する突起部をそれぞれ備え、
前記第一凹部及び前記第二凹部は、前記マイクロチューブの蓋部及び前記容器本体部の開口端に形成されたフランジ部が、前記蓋部の厚さ方向に所定のクリアランスが残る状態で挿入されることを特徴とし、
前記ビットは、
前記マイクロチューブに振動を与えて前記マイクロチューブ内の液体を攪拌する処理において、前記突起部と前記外周面との間に隙間を有する状態で前記マイクロチューブを保持する
ことを特徴とする液体処理システム。
【請求項10】
請求項1から請求項9のいずれか一項に記載の液体処理システムであって、
前記第一腕部及び前記第二腕部が少なくとも6自由度以上の自由度を有することを特徴とする液体処理システム。
【請求項11】
請求項1から請求項10のいずれか一項に記載の液体処理システムであって、
前記第一腕部及び前記第二腕部を含め前記胴部には2以上の腕部が設けられていることを特徴とする液体処理システム。
【請求項12】
請求項1から請求項11のいずれか一項に記載の液体処理システムであって、
前記理化学機器には、電力の供給を受けて動作する汎用理化学機器と、単回使用の汎用容器と、前記汎用容器を保持するラックとの少なくとも何れかが含まれていることを特徴とする液体処理システム。
【請求項13】
請求項1から請求項12のいずれか一項に記載の液体処理システムを用いることを特徴とする液体処理方法。
【請求項1】
液性の生物学的材料を処理する液体処理システムであって、
所定の作業空間内に設定された軸線回りに回動自在に設けられた胴部と、
前記胴部に設けられ少なくとも3自由度以上の自由度を有する第一腕部と、
前記胴部に設けられ少なくとも3自由度以上の自由度を有する第二腕部と、
前記胴部、前記第一腕部、及び前記第二腕部をそれぞれ動作させる駆動手段と、
前記作業空間内且つ前記第一腕部と前記第二腕部との少なくともいずれかの可動範囲内に配置された理化学機器と、
を備え、
前記理化学機器の位置及び形状に基づいたティーチングプレイバックにより前記駆動手段を動作させて前記理化学機器を用いた前記生物学的材料の処理をする
ことを特徴とする液体処理システム。
【請求項2】
請求項1に記載の液体処理システムであって、
前記第一腕部は前記理化学機器を取り扱うための第一ロボットハンドを備え、
前記第二腕部は前記理化学機器を取り扱うための第二ロボットハンドを備え、
前記理化学機器であって互いに異なる処理を行う複数の理化学機器が、前記第一ロボットハンドと前記第二ロボットハンドとの少なくともいずれかの可動範囲内に配置されていることを特徴とする液体処理システム。
【請求項3】
請求項2に記載の液体処理システムであって、
前記複数の理化学機器であって前記生物学的材料の処理のうち所定の手順に従って実行される処理に用いられる全ての理化学機器が前記第一ロボットハンドと前記第二ロボットハンドとの双方の可動範囲内に配置されていることを特徴とする液体処理システム。
【請求項4】
請求項2または請求項3に記載の液体処理システムであって、
前記第一ロボットハンドと前記第二ロボットハンドとの相対位置を検出し、前記第一腕部と前記第二腕部とを協調動作させる
ことを特徴とする液体処理システム。
【請求項5】
請求項2から請求項4のいずれか一項に記載の液体処理システムであって、
前記第一ロボットハンドと前記第二ロボットハンドとは同形であることを特徴とする液体処理システム。
【請求項6】
請求項2から請求項5のいずれか一項に記載の液体処理システムであって、
前記液体処理システムは、前記液性の生物学的材料として、付着性の培養細胞が懸濁された細胞懸濁液を調製するシステムであり、
前記理化学機器は、
前記培養細胞が培養される培養面を底部に有し上部が開口された培養容器と、
前記培養細胞を前記培養面からかきとるブレードが設けられたセルスクレーパーと、
を含み、
前記第一ロボットハンドは、前記開口が上に向けられた状態で前記培養容器を把持し、
前記第二ロボットハンドは、前記セルスクレーパーを把持し、
前記第一腕部及び前記第二腕部は、
前記培養面において前記培養面の中央から離間した一箇所に、前記中央と前記一箇所とを結ぶ直線と交差する方向に前記ブレードの長手方向が向くように、前記ブレードを接触させ、
前記一箇所において前記培養面に接触された前記ブレードを、前記一箇所から前記中央を通って反対側まで前記培養面に沿って移動させ、
前記反対側まで移動された前記ブレードを、前記ブレードの長手方向の延長線上であって前記ブレードの長手方向の両端よりも外側の一点を回転軸として、前記両端のうち前記一点から遠い側の端が前記培養面の外縁に位置するまで、前記培養面と前記ブレードとが接触された状態で、回転させ、
前記一点から遠い側の前記ブレードの端を前記外縁に沿わせた状態で、前記培養面に前記ブレードが接触された状態で前記ブレードを前記培養面に対して相対移動させる
ことを特徴とし、
さらに、
前記第一腕部は、
前記ブレードを前記培養面上で移動させているときには、前記培養容器内にある細胞懸濁液が前記培養容器の一部に集積されるように前記培養容器を傾斜させ、前記培養面から剥離された前記培養細胞を含む細胞懸濁液が前記培養容器に対する前記ブレードの移動方向の前方に位置するように、前記第二腕部と協調動作される
ことを特徴とする液体処理システム。
【請求項7】
請求項6に記載の液体処理システムであって、
前記第一ロボットハンドと前記第二ロボットハンドとのうち少なくとも前記第二ロボットハンドは、
開閉動作可能な一対のビットを有し、
前記一対のビットは、
前記培養容器の深さ方向における前記培養容器の外寸以上の長さを有する棒状の把持部材を4つ備え、
前記把持部材は、前記一対のビットの各々に、互いに平行に2つずつ配置されており、
各前記把持部材の先端は、同一の仮想平面内に存する
ことを特徴とし、
さらに、
前記第二ロボットハンドは、
前記培養容器の開口側から底部側へ向かって前記把持部材を移動させて前記培養容器の外周を囲むように前記把持部材を配置し、
前記一対のビットを閉じることにより、前記把持部材の先端によって前記培養容器の底部の外周を保持し、且つ前記先端よりも基端側の前記把持部材の外周面によって前記培養容器の外周面を保持する
ことを特徴とする液体処理システム。
【請求項8】
請求項2から請求項5のいずれか一項に記載の液体処理システムであって、
前記理化学機器は、
容器本体部、及び可撓性のヒンジによって前記容器本体部と連結された押蓋式の蓋部、を有するマイクロチューブと、
前記マイクロチューブの底部が差し込まれる孔を有して前記マイクロチューブを保持するチューブラックと、
を含み、
前記第一ロボットハンドと前記第二ロボットハンドとの少なくとも何れかは、前記蓋部が挿入される第一凹部を有するビットを備え、
前記第一腕部と前記第二腕部とのうち前記ビットを備える少なくとも一方は、
前記蓋部によって閉じられた状態で前記チューブラックに保持された前記マイクロチューブの前記蓋部のうち前記ヒンジの反対側に位置する部分を前記第一凹部に係止させて、前記ビットにおける前記第一凹部以外の一部を前記ヒンジに当接させ、前記ヒンジを支点として前記蓋部を前記容器本体部から引き抜き、
または、
前記容器本体部に対して前記蓋部が外れた状態で前記チューブラックに保持された前記マイクロチューブの前記蓋部を前記ビットによって押圧して前記ヒンジを湾曲させ、さらに前記蓋部の一部を前記ビットによって押圧して前記容器本体部内に押し込む
ことを特徴とする液体処理システム。
【請求項9】
請求項8に記載の液体処理システムであって、
前記ビットは、
前記第一凹部を有する第一ビットと、
前記第一凹部と同形の第二凹部を有し前記第一ビットに対して相対移動される第二ビットと、
を有し、
前記第一ビットと前記第二ビットとは、前記第一凹部と前記第二凹部とが各々の開口が正対するように対向配置され、
前記第一ビットと前記第二ビットとは、互いに離間する2点で前記マイクロチューブの容器本体部の外周面を支持する突起部をそれぞれ備え、
前記第一凹部及び前記第二凹部は、前記マイクロチューブの蓋部及び前記容器本体部の開口端に形成されたフランジ部が、前記蓋部の厚さ方向に所定のクリアランスが残る状態で挿入されることを特徴とし、
前記ビットは、
前記マイクロチューブに振動を与えて前記マイクロチューブ内の液体を攪拌する処理において、前記突起部と前記外周面との間に隙間を有する状態で前記マイクロチューブを保持する
ことを特徴とする液体処理システム。
【請求項10】
請求項1から請求項9のいずれか一項に記載の液体処理システムであって、
前記第一腕部及び前記第二腕部が少なくとも6自由度以上の自由度を有することを特徴とする液体処理システム。
【請求項11】
請求項1から請求項10のいずれか一項に記載の液体処理システムであって、
前記第一腕部及び前記第二腕部を含め前記胴部には2以上の腕部が設けられていることを特徴とする液体処理システム。
【請求項12】
請求項1から請求項11のいずれか一項に記載の液体処理システムであって、
前記理化学機器には、電力の供給を受けて動作する汎用理化学機器と、単回使用の汎用容器と、前記汎用容器を保持するラックとの少なくとも何れかが含まれていることを特徴とする液体処理システム。
【請求項13】
請求項1から請求項12のいずれか一項に記載の液体処理システムを用いることを特徴とする液体処理方法。
【図1】


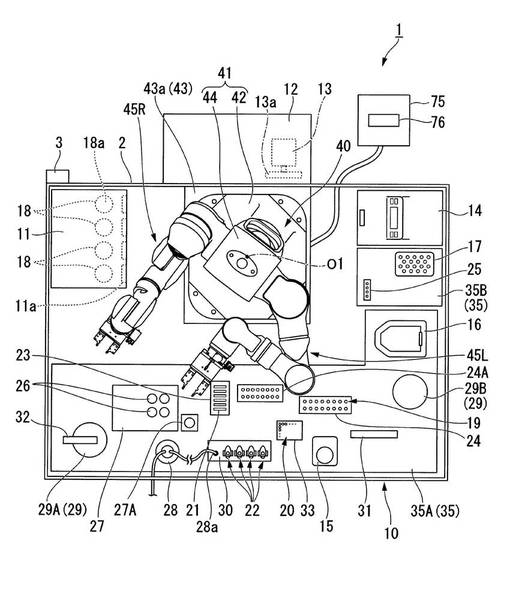
【図2】
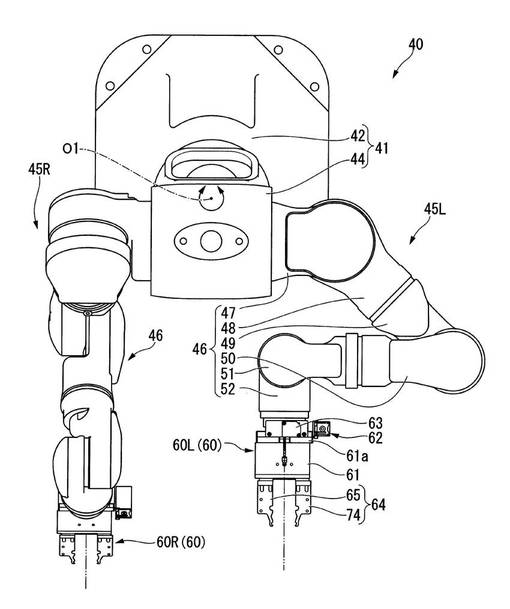
【図3】
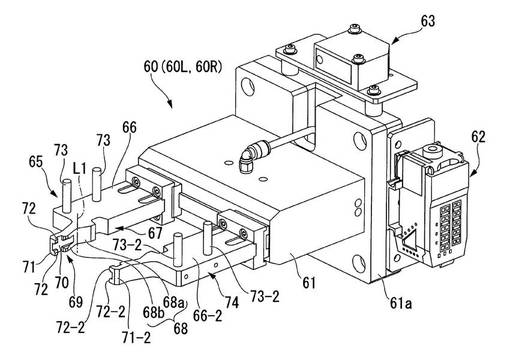
【図4】
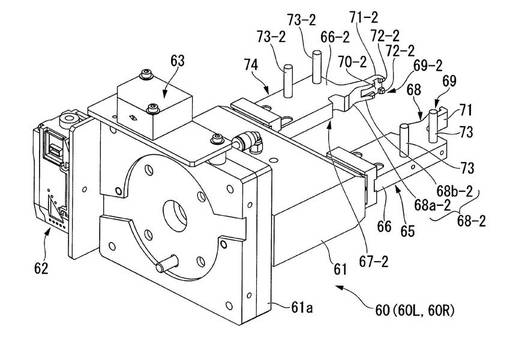
【図5】
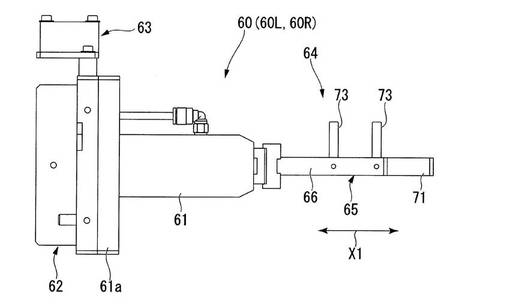
【図6】
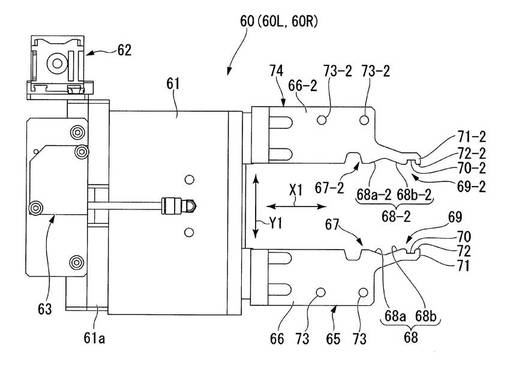
【図7】
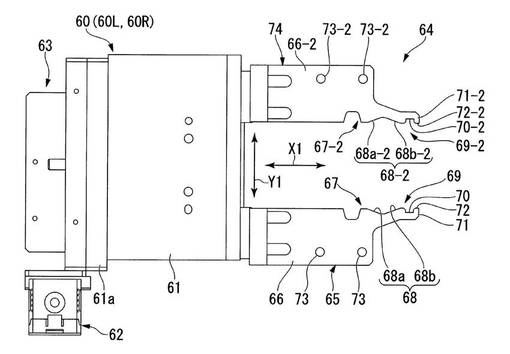
【図8】
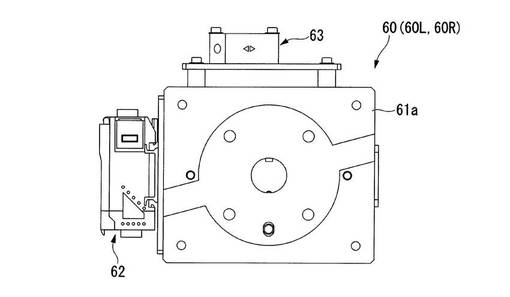
【図9】
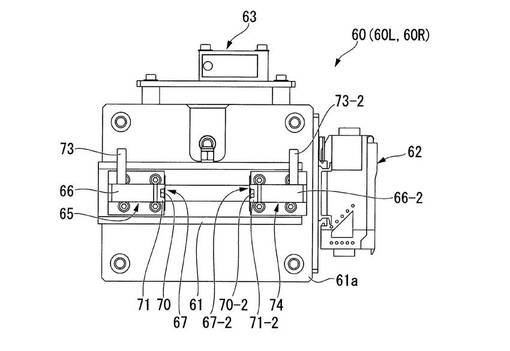
【図10】

【図11】
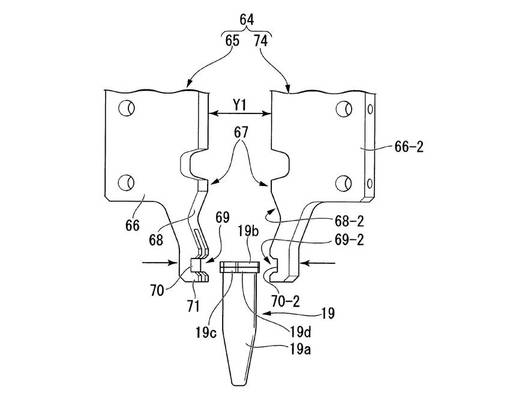
【図12】
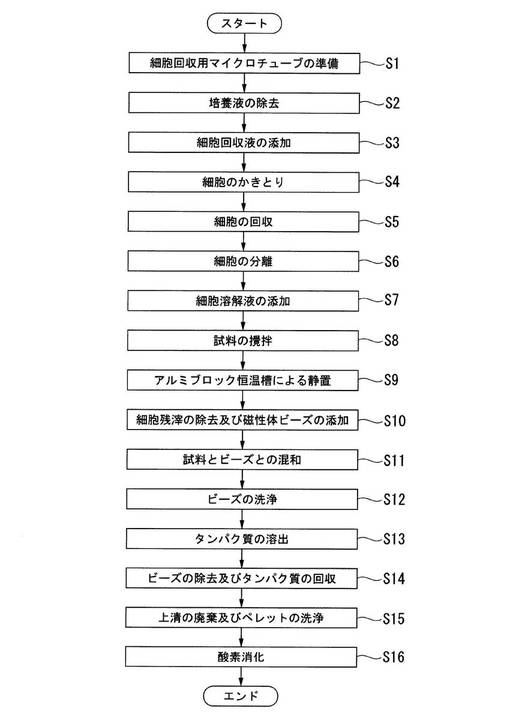
【図13】
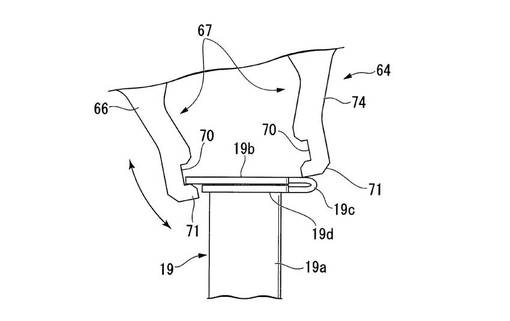
【図14】
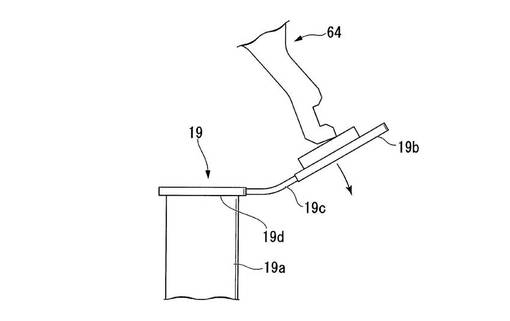
【図15】
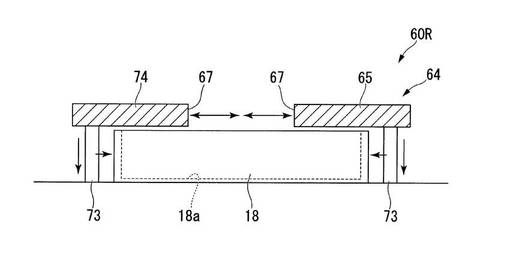
【図16】
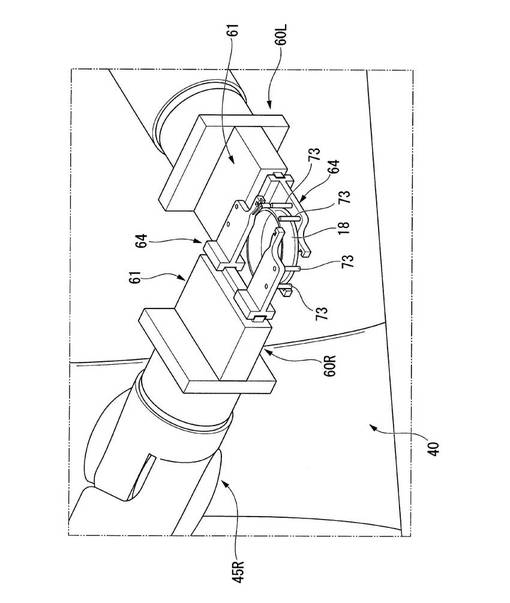
【図17】
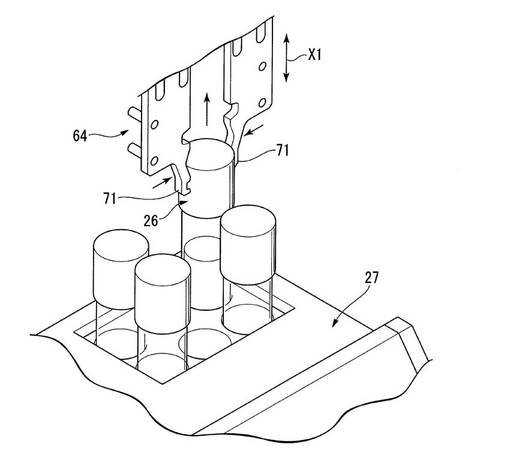
【図18】
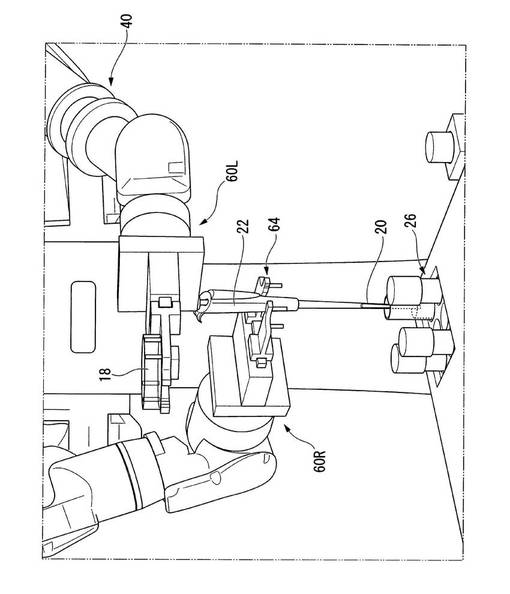
【図19】
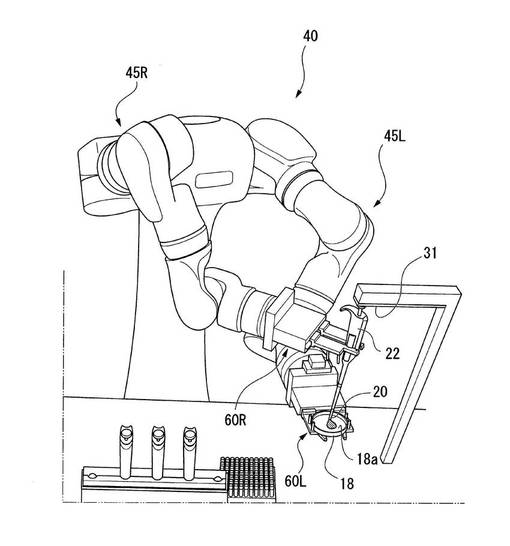
【図20】
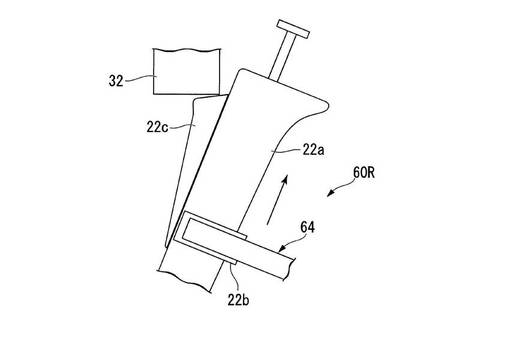
【図21】
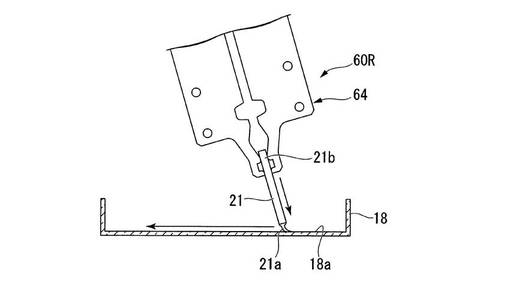
【図22】
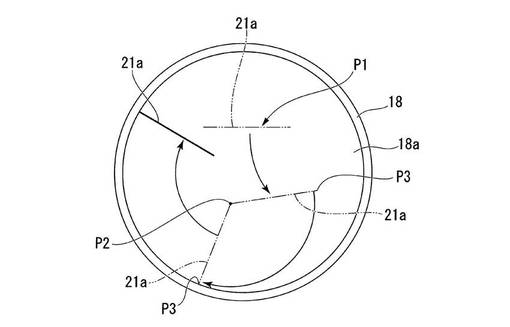
【図23】
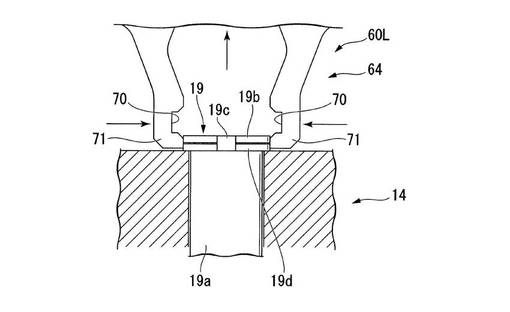
【図24】
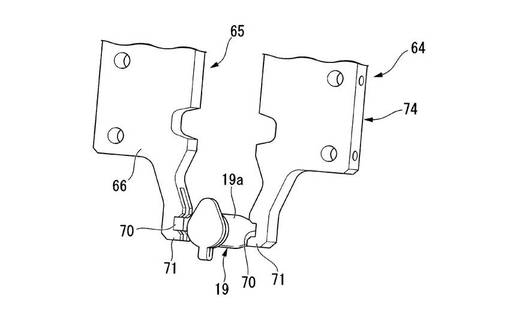
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2013−9618(P2013−9618A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−143457(P2011−143457)
【出願日】平成23年6月28日(2011.6.28)
【出願人】(000006622)株式会社安川電機 (2,482)
【出願人】(503318666)日京テクノス株式会社 (19)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月28日(2011.6.28)
【出願人】(000006622)株式会社安川電機 (2,482)
【出願人】(503318666)日京テクノス株式会社 (19)
【Fターム(参考)】
[ Back to top ]