
液体吐出装置
【課題】加湿液がない状態においても、吐出口からの液体吐出性能を回復させる。
【解決手段】プリンタは、キャップ手段と、生成した加湿空気を吐出空間に供給する加湿空気供給機構と、吐出口からインクを排出させるインク排出動作を行う排出手段と、タンク内の水の有無を検出するセンサと、これらを制御する制御部とを含んでいる。制御部は、キャップ手段が吐出空間を封止状態としてから加湿空気供給機構が加湿メンテナンスを行うまでに、センサがタンク内の水が無いことを検出した場合、水が有ると検出した場合よりも、インク排出動作におけるインク排出量が多くなるように、排出手段を制御する。
【解決手段】プリンタは、キャップ手段と、生成した加湿空気を吐出空間に供給する加湿空気供給機構と、吐出口からインクを排出させるインク排出動作を行う排出手段と、タンク内の水の有無を検出するセンサと、これらを制御する制御部とを含んでいる。制御部は、キャップ手段が吐出空間を封止状態としてから加湿空気供給機構が加湿メンテナンスを行うまでに、センサがタンク内の水が無いことを検出した場合、水が有ると検出した場合よりも、インク排出動作におけるインク排出量が多くなるように、排出手段を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液体を吐出する液体吐出装置に関する。
【背景技術】
【0002】
液体吐出装置は、インク等の液体を吐出する吐出口が開口した吐出面を有するヘッドを備えている。この吐出口から液体が吐出されない状況が長時間続くと、吐出口近傍の液体の水分が蒸発して増粘し、吐出口に目詰まりが生じる。この吐出口の目詰まりを抑制するための技術として、例えば、下記特許文献1に記載された技術が知られている。
【0003】
特許文献1に記載された技術では、凹状のキャッピング部によって吐出面を覆うことで、外部空間から隔てられた吐出空間を形成する。そして、キャッピング部の底面に空気供給口及び空気排出口が形成された空気流路を有する空調装置により、加湿した空気を空気供給口から吐出空間内に供給し、且つ吐出空間内の空気を空気排出口から排出することで吐出口近傍の液体を加湿している。こうして、吐出口近傍の液体の乾燥が抑制され、吐出口の目詰まりが抑制される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−212138号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の技術において、空調装置が、例えば、加湿液を用いて加湿空気の湿度を調整している場合、当該加湿液が無くなると、空気の湿度を調整することができなくなる。この状態で、湿度調整がされていない空気が吐出空間内に供給されると、吐出口近傍の液体の水分が蒸発して粘性が増加する。つまり、吐出口に詰まりが生じ、吐出不良が生じるという問題がある。
【0006】
そこで、本発明の目的は、加湿液がない状態においても、吐出口からの液体吐出性能を回復させることが可能な液体吐出装置を提供することである。
【課題を解決するための手段】
【0007】
本発明の液体吐出装置は、液体を吐出するための吐出口が形成された液体吐出ヘッドと、前記吐出口と対向する吐出空間が外部空間から封止された封止状態と、前記吐出空間が前記外部空間に対して開放された非封止状態とを取り得るキャップ手段と、加湿空気を生成するための加湿液が貯留された貯留部を有し、加湿空気を生成するとともに前記封止状態の前記吐出空間内に加湿空気を供給する加湿動作を行う加湿空気供給機構と、前記吐出口から液体を排出させる排出手段と、前記吐出空間を前記封止状態とするように前記キャップ手段を制御した後に前記加湿動作を行うように前記加湿空気供給機構を制御するとともに、前記加湿動作後の待機状態において、印刷指令を受信すると、前記吐出空間を前記非封止状態とするように前記キャップ手段を制御した後に前記吐出口から液体を排出させる液体排出動作を行うように前記排出手段を制御する制御手段と、前記貯留部内の加湿液の有無を検出する検出手段とを備えている。そして、前記制御手段は、前記キャップ手段が前記吐出空間を前記封止状態としてから前記加湿空気供給機構が前記加湿動作を開始するまでに、前記検出手段が前記貯留部内の加湿液が無いことを検出した場合、前記加湿液が有ると検出したときよりも、前記液体排出動作における前記吐出口からの液体排出量が多くなるように、前記排出手段を制御する。
【発明の効果】
【0008】
本発明の液体吐出装置によると、加湿液がない状態で加湿動作を行っていた場合においても、吐出口からの液体吐出性能を回復させることが可能となる。そのため、印刷指令に基づいて形成された画像の品質を維持することが可能となる。
【図面の簡単な説明】
【0009】
【図1】本発明の液体吐出装置の一実施形態によるインクジェットプリンタの内部構造を示す概略側面図である。
【図2】図1のプリンタに含まれるインクジェットヘッドのヘッド本体を示す平面図である。
【図3】図2の一点鎖線で囲まれた領域を示す拡大図である。
【図4】図3に示すIV−IV線に沿った部分断面図である。
【図5】図4の一点鎖線で囲まれた領域を示す拡大図である。
【図6】図1のプリンタに含まれるヘッドホルダ及び加湿空気供給機構を示す概略図である。
【図7】図6の一点鎖線で囲まれた領域を示す部分断面図であり、キャップが離隔位置にある状況を示す図である。
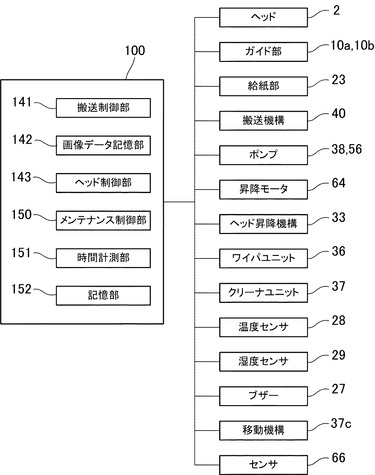
【図8】図1に示す制御部の機能ブロック図である。
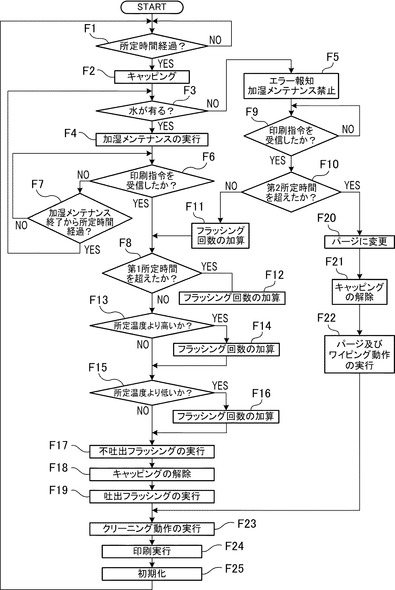
【図9】図1のプリンタの制御部が実行するメンテナンス動作に関する一連の動作フローを示すフローチャート図である。
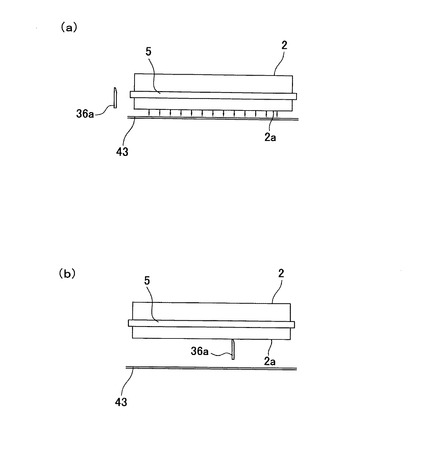
【図10】ワイピング動作を説明するための動作状況図である。
【発明を実施するための形態】
【0010】
以下、本発明の好適な実施の形態について、図面を参照しつつ説明する。
【0011】
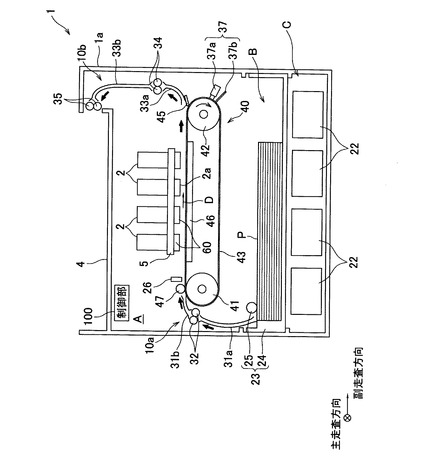
先ず、図1を参照し、本発明の液体吐出装置の一実施形態であるインクジェットプリンタ1の全体構成について説明する。
【0012】
プリンタ1は、直方体形状の筐体1aを有する。筐体1aの天板上部には、排紙部4が設けられている。筐体1aの内部空間は、上から順に空間A,B,Cに区分できる。空間A,Bには、給紙部23から排紙部4に向かう用紙搬送経路が形成されており、図1に示す黒太矢印に沿って用紙Pが搬送される。空間Aでは、用紙Pへの画像形成と、用紙Pの排紙部4への搬送が行われる。空間Bでは、用紙Pの搬送経路への給紙が行われる。空間Cからは、空間Aのインクジェットヘッド2に対するインク供給が行われる。
【0013】
空間Aには、4つのインクジェットヘッド2(以下、ヘッド2と称する)、搬送機構40、用紙Pをガイドする2つのガイド部10a,10b、加湿メンテナンスに用いられる加湿空気供給機構50(図6参照)、ヘッド昇降機構33(図8参照)、ワイパユニット36(図8参照)、クリーナユニット37、ブザー27(図8参照)、温度センサ28(図8参照)、湿度センサ29(図8参照)、及び、制御部100等が配置されている。なお、温度センサ28及び湿度センサ29は、ヘッド2近傍に配置されており、検出した温度及び湿度を示す信号を制御部100に出力する。また、ブザー27は、制御部100近傍に配置されている。
【0014】
4つのヘッド2からは、マゼンタ、イエロー、シアン、ブラックのいずれかのインク滴が吐出される。これら4つのヘッド2は、主走査方向に長尺な略直方体形状を有する。また、4つのヘッド2は、副走査方向に所定ピッチで並び、ヘッドホルダ5を介して筐体1aに支持されている。ヘッドホルダ5によって、ヘッド2の下面と搬送ベルト43(搬送機構40)との間には、記録に適した所定の間隙が形成される。
【0015】
各ヘッド2は、ヘッド本体3に加えて、アクチュエータユニット21、リザーバユニット、フレキシブルプリント配線基板(FPC)、制御基板等が積層された積層体である。ヘッド本体3(流路ユニット9)の下面は、吐出口108が開口しており、吐出面2aである。制御基板で調整された信号は、FPC上のドライバICで駆動信号に変換され、さらにアクチュエータユニット21に出力される。アクチュエータユニット21が駆動されると、リザーバユニットから供給されたインクが、吐出口108から吐出されることになる。
【0016】
加湿空気供給機構50を構成するキャップ60が、ヘッドホルダ5に取り付けられている。キャップ60は、ヘッド2毎に配設された環状部材であって、平面視でヘッド2を内包する。キャップ60の構成、動作、機能等は、後に詳述する。
【0017】
ヘッド昇降機構33は、ヘッドホルダ5を昇降させ、4つのヘッド2が印刷位置と退避位置の間で移動する。印刷位置では、4つのヘッド2が搬送ベルト43と印刷に適した間隔で対向する。退避位置では、4つのヘッド2が搬送ベル43から印刷位置以上の間隔で離隔する。退避位置では、4つのヘッド2と搬送ベルト43との間の空間を、ワイパユニット36が移動可能である。
【0018】
ワイパユニット36は、4つのワイパ36a(図10参照)を有し、各吐出面2aを払拭する。ワイパ36aは、ゴムなどの板状弾性部材である。なお、図10においては、1のワイパ36aのみ示している。ワイパユニット36は、ワイパ36aを、ヘッド2の吐出面2aに接触させつつ主走査方向に沿って移動させることによって、吐出面2aを払拭する。
【0019】
クリーナユニット37は、洗浄液塗布部材37a、ブレード37b及びこれらを移動させる移動機構37c(図8参照)を有し、搬送ベルト43の外周面をクリーニングする。クリーナユニット37は、図1に示すように、搬送ベルト43の右下方であって、ベルトローラ42に対向して配置されている。洗浄液塗布部材37aは、多孔質体(例えば、スポンジ)とこれを支持する支持部材から構成され、ブレード37bは、板状弾性部材(例えば、ゴム)で構成される。共に、搬送ベルト43を全幅に亘って接触可能である。後述のクリーニング動作において、移動機構37cは、洗浄液塗布部材37a及びブレード37bを搬送ベルト43の外周面に当接する。搬送ベルト43が走行すると、多孔質体から外周面に洗浄液が塗布され、下流側のブレード37bにより洗浄液が外周面の汚れと共に掻き取られる。
【0020】
搬送機構40は、2つのベルトローラ41,42と、搬送ベルト43と、プラテン46と、ニップローラ47と、剥離プレート45とを有している。搬送ベルト43は、両ローラ41,42の間に巻回されたエンドレスのベルトである。プラテン46は、4つのヘッド2に対向配置され、搬送ベルト43の上側ループを内側から支える。ベルトローラ42は、駆動ローラであって、搬送ベルト43を走行させる。ベルトローラ42は、図示しないモータによって、図1中時計回りに回転される。ベルトローラ41は、従動ローラであって、搬送ベルト43の走行によって回転される。搬送ベルト43の外周面には、弱粘着性のシリコン層が形成されている。ニップローラ47は、給紙部23から搬送されてきた用紙Pを搬送ベルト43の外周面に押さえ付ける。用紙Pは、シリコン層によって搬送ベルト43に保持され、ヘッド2に向かって搬送される。剥離プレート45は、搬送されてきた用紙Pを搬送ベルト43から剥離し、下流側の排紙部4へと導く。
【0021】
2つのガイド部10a,10bは、搬送機構40を挟んで配置されている。搬送方向上流側のガイド部10aは、2つのガイド31a,31bと送りローラ対32とを有し、給紙部23と搬送機構40とを繋ぐ。画像形成用の用紙Pが、搬送機構40に向けて搬送される。搬送方向下流側のガイド部10bは、2つのガイド33a,33bと2つの送りローラ対34,35とを有し、搬送機構40と排紙部4とを繋ぐ。画像形成後の用紙Pが、排紙部4に向けて搬送される。
【0022】
空間Bには、給紙部23が配置されている。給紙部23は、給紙トレイ24及び給紙ローラ25を有する。このうち、給紙トレイ24が、筐体1aに対して着脱可能となっている。給紙トレイ24は、上方に開口する箱であり、複数の用紙Pを収納可能である。給紙ローラ25は、給紙トレイ24内で最も上方にある用紙Pを送り出す。
【0023】
ここで、副走査方向とは、搬送機構40によって搬送される用紙搬送方向Dと平行な方向であり、主走査方向とは、水平面に平行且つ副走査方向に直交する方向である。
【0024】
空間Cには、インクを貯留する4つのカートリッジ22が筐体1aに着脱可能に配置されている。4つのカートリッジ22には、マゼンタ、シアン、イエロー、及びブラックのインクが貯留されており、対応するヘッド2にチューブ(不図示)及びポンプ38(図8参照)を介して接続されている。なお、各ポンプ38(強制排出手段:排出手段の一部)は、ヘッド2にインクを強制的に送るとき(すなわち、パージ動作や液体の初期導入が行われるとき)に制御部100によって駆動される。これ以外は停止状態にあり、ヘッド2のインク供給を妨げない。
【0025】
次に、制御部100について説明する。制御部100は、プリンタ1各部の動作を制御してプリンタ1全体の動作を司る。制御部100は、外部装置(プリンタ1と接続されたPC等)から供給された印刷指令に基づいて、画像形成動作を制御する。具体的には、制御部100は、用紙Pの搬送動作、用紙Pの搬送に同期したインク吐出動作等を制御する。
【0026】
制御部100は、外部装置から受信した印刷指令に基づいて、給紙部23、搬送機構40、及び、各送りローラ対32,34,35を駆動する。給紙トレイ24から送り出された用紙Pは、上流側ガイド部10aによりガイドされ搬送機構40に送られる。搬送機構40によって搬送される用紙Pは、ヘッド2のすぐ下方を通過する際に、制御部100によってヘッド2が制御され、各ヘッド2からインク滴が順に吐出される。これにより、用紙Pの表面に所望のカラー画像が形成される。インクの吐出動作は、用紙センサ26からの検知信号に基づく。用紙センサ26は、ヘッド2よりも搬送方向Dの上流に配置されており、用紙Pの先端を検知する。インクの吐出タイミングは、検知信号により決められる。そして、画像が形成された用紙Pは、剥離プレート45によって搬送ベルト43から剥離された後、下流側ガイド部10bによりガイドされて、筐体1a上部から排紙部4に排出される。
【0027】
制御部100はまた、ヘッド2のインク吐出特性の回復を行うメンテナンス動作を制御する。制御部100は、メンテナンス動作によって、ヘッド2のインク吐出特性の回復・維持や記録に係わる準備を行う。メンテナンス動作には、パージやフラッシング動作、吐出面2aのワイピング動作、搬送ベルト43のクリーニング動作、キャッピングや加湿によるインクの増粘防止動作等が含まれる。
【0028】
パージ動作では、ポンプ38が駆動されて、全ての吐出口108からインクが強制的に排出される。このとき、アクチュエータは駆動されない。フラッシング動作には、吐出フラッシングと、不吐出フラッシングとがある。吐出フラッシングでは、アクチュエータが駆動されて、全ての吐出口108からインクが吐出される。不吐出フラッシングでは、アクチュエータが駆動されて、吐出口108からインクを吐出することなく吐出口108に形成されたインクメニスカスが振動される。吐出フラッシングは、吐出フラッシングデータ(画像データと異なるデータ)に基づいて行われる。不吐出フラッシングにおいても、不吐出フラッシングデータに基づいて行われる。ワイピング動作では、吐出面2aがワイパ36a(図10参照)によって払拭される。ワイピング動作は、パージ動作後に行われ、吐出面2a上の残留インクや異物が取り除かれる。また、クリーニング動作では、搬送ベルト43がクリーナユニット37によって払拭される。クリーニング動作は、パージ及び吐出フラッシング後に行われ、搬送ベルト43上のインクや異物が除去される。
【0029】
キャッピングでは、図6に示すように、キャップ60により吐出空間(吐出面2a(吐出口108)と対向する空間)S1が外部空間S2から隔離される。加湿動作(加湿メンテナンス)では、図6に示すように、隔離された吐出空間S1に加湿空気が供給される。キャッピングにより、吐出空間S1内に水蒸気が留まり、加湿により乾燥がさらに抑制される。
【0030】
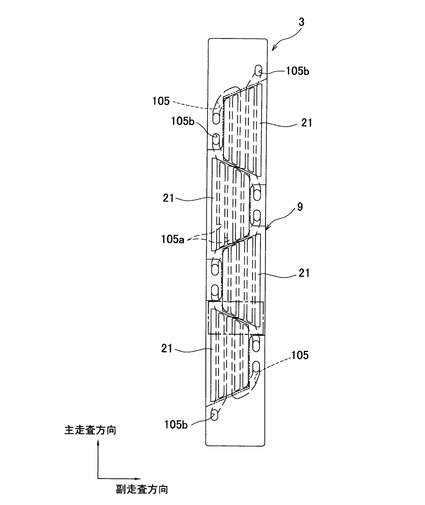
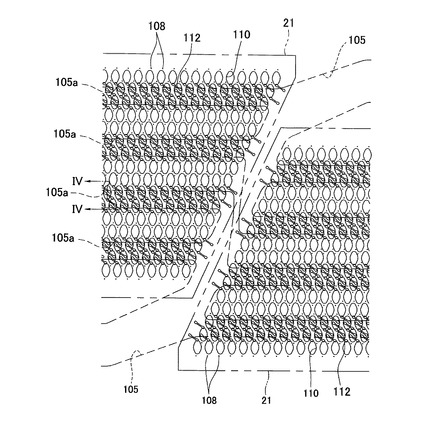
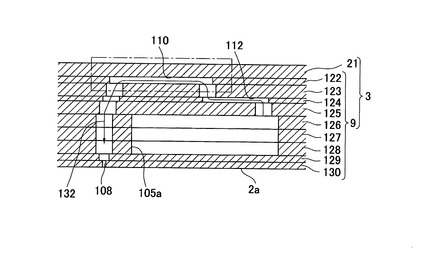
次に、図2〜図5を参照しつつヘッド2のヘッド本体3について詳細に説明する。図3では説明の都合上、アクチュエータユニット21の下方にあって破線で描くべき圧力室110、アパーチャ112及び吐出口108を実線で描いている。
【0031】
ヘッド本体3は、図2に示すように、流路ユニット9の上面に4つのアクチュエータユニット21が固定された積層体である。流路ユニット9の下面が、吐出面2aである。流路ユニット9の内部にはインク流路が形成され、アクチュエータユニット21はこの流路内のインクに吐出エネルギーを付与する。
【0032】
流路ユニット9は、図4に示すように、ステンレス製の9枚の金属プレート122〜130を積層した積層体である。流路ユニット9の上面には、図2に示すように、リザーバユニットに連通する計10個のインク供給口105bが開口している。流路ユニット9の内部には、図2〜図4に示すように、インク供給口105bを一端とするマニホールド流路105、及び、マニホールド流路105から分岐した複数の副マニホールド流路105aが形成されている。さらに、各副マニホールド流路105aの出口から圧力室110を経て吐出口108に至る複数の個別インク流路132が形成されている。吐出面2aに形成された多数の吐出口108は、マトリクス状に配置されており、主走査方向(一方向)に関してこの方向の解像度である600dpiの間隔で配列されている。
【0033】
図2〜図4に示すように、リザーバユニットからインク供給口105bに供給されたインクは、マニホールド流路105(副マニホールド流路105a)に流入する。副マニホールド流路105a内のインクは、各個別インク流路132に分配され、アパーチャ112及び圧力室110を経て吐出口108に至る。
【0034】
次に、アクチュエータユニット21について説明する。図2に示すように、4つのアクチュエータユニット21は、それぞれ台形の平面形状を有しており、インク供給口105bを避けるよう主走査方向に千鳥状に配置されている。さらに、各アクチュエータユニット21の平行対向辺は主走査方向に沿っており、隣接するアクチュエータユニット21の斜辺同士は副走査方向に沿って重なっている。
【0035】
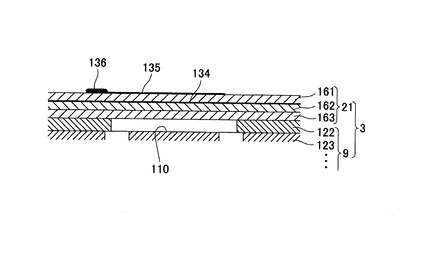
図5に示すように、アクチュエータユニット21は、強誘電性を有するチタン酸ジルコン酸鉛(PZT)系セラミックス製の3枚の圧電層161〜163から構成されたピエゾ式アクチュエータである。最上層の圧電層161は、厚み方向に分極されている。また、圧電層161の上面には、複数の個別電極135が形成されている。個別電極135は、圧力室110と対向している。個別電極135の先端には、個別ランド136が設けられている。圧電層161とその下側の圧電層162との間には、界面全体に形成された共通電極134が介在している。なお、共通電極134には、すべての圧力室110に対応する領域において、等しくグランド電位が付与されている。一方、個別電極135には、個別ランド136を介して駆動信号が選択的に供給される。
【0036】
個別電極135を共通電極134と異なる電位にすると、個別電極135と圧力室110とで挟まれた部分が、圧力室110に対して変形する。このように個別電極135に対応した部分が、個別のアクチュエータ(排出手段の一部)として働く。つまり、アクチュエータユニット21には、圧力室110に対応した数のアクチュエータが作り込まれており、それぞれ圧力室110内のインクに選択的に吐出エネルギーを与える。
【0037】
ここで、アクチュエータユニット21の駆動方法について述べる。アクチュエータユニット21は、圧力室110から離れた上側1枚の圧電層161を駆動活性部(両電極134,135に挟まれた部分)が含まれる層とし、且つ圧力室110に近い下側2枚の圧電層162、163を非活性層とした、いわゆるユニモルフタイプのアクチュエータである。例えば、分極方向と電界の印加方向とが同じであれば、駆動活性部は、分極方向に直交する方向(平面方向)に縮む。このとき、下方の圧電層162、163に対して、平面方向への歪みに差が生じるので、圧電層161〜163全体(個別のアクチュエータ)が、圧力室110側へ凸に変形(ユニモルフ変形)する。これにより圧力室110内のインクに圧力(吐出エネルギー)が付与され、吐出口108からインク滴が吐出される。
【0038】
なお、本実施形態においては、個別電極135の電位が、予め所定の電位が付与されているところ、駆動信号が供給されて、一旦グランド電位となり、その後の所定のタイミングで再び所定電位に復帰する。個別電極135がグランド電位となるタイミングでは、圧電層161〜163が元の状態に戻り、圧力室110の容積が増加するので、副マニホールド流路105aから個別インク流路132へとインクが吸い込まれる。また、再び個別電極135に所定の電位が付与されたタイミングでは、圧電層161〜163において個別のアクチュエータ部分が圧力室110側に凸となるように変形し、圧力室110の容積が低下(インクの圧力が上昇)するので、吐出口108からインク滴が吐出される。
【0039】
次に、図6及び図7を参照し、ヘッドホルダ5及びこれに取り付けられたキャップ手段の構成について説明する。
【0040】
ヘッドホルダ5は、金属等からなる枠状フレームであり、ヘッド2の側面を全周に亘って支持している。ヘッドホルダ5には、キャップ60と一対のジョイント51とが取り付けられている。キャップ60及びジョイント51は、共に加湿空気供給機構50の構成部材であって、キャップ60が閉ざされた吐出空間S1を作り、空間内の空気がジョイント51を介して加湿空気と置換される。ここで、ヘッドホルダ5とヘッド2との当接部は、全周に亘って封止剤で封止されている。また、ヘッドホルダ5とキャップ60との当接部は、全周に亘って接着剤で固定されている。
【0041】
一対のジョイント51は、吐出空間S1に対する加湿空気の出入口である。一対のジョイント51は、図6に示すように、供給口51aを持つ左側ジョイント51と排出口51bを持つ右側ジョイント51とから構成され、ヘッド2を主走査方向に挟んで配置されている。加湿メンテナンスでは、吐出空間S1に対し、供給口51aから加湿空気が供給され、排出口51bから空気が排出される。
【0042】
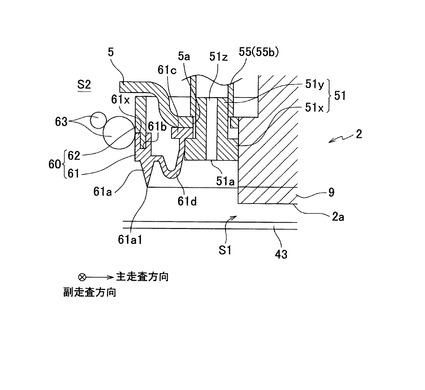
ジョイント51は、方形状の基端部51x、及び、基端部51xから延出した円柱状の先端部51yを含んでいる。基端部51xの方が、先端部51yより外形サイズが大きい。基端部51xは、副走査方向を長手方向とし、その長手方向の幅(長さ)は、吐出面2aとほぼ同じになっている。内部には、図7に示すように、基端部51xから先端部51yに亘って、鉛直方向に沿った中空空間51zが形成されている。中空空間51zは、先端部51yでは円柱状空間であり、これに繋がる基端部51xでは供給口51aに向かって拡開する扇状空間である。供給口51aは、副走査方向に長い。
【0043】
ヘッドホルダ5には、平面視円形の貫通孔5aが形成されており、ジョイント51は、先端部51yが貫通孔5aに貫挿された状態で、ヘッドホルダ5に固定されている。先端部51yは、貫通孔5aよりも一回り小さいが、両者間の隙間には封止剤等が充填されて、封止される。
【0044】
キャップ60は、平面視でヘッド2の外周を取り囲む矩形の環状部材であり、主走査方向に長い。キャップ60は、図7に示すように、ヘッドホルダ5に支持された弾性体61、及び、昇降可能な可動体62を含む。
【0045】
弾性体61は、ゴム等の環状弾性材料からなり、平面視でヘッド2を囲んでいる。弾性体61は、図7に示すように、基部61x、基部61xの下面から突出した突出部61a、ヘッドホルダ5に固定された固定部61c、及び、基部61xと固定部61cとを接続する接続部61dを含む。このうち、突出部61aは、断面が三角形である。また、固定部61cは、断面がT字状である。固定部61cの上端部分は、接着剤等によって、ヘッドホルダ5に固定されている。固定部61cはまた、ヘッドホルダ5と各ジョイント51の基端部51xとで挟持されている。接続部61dは、固定部61cの下端から湾曲しつつ外側(平面視で吐出面2aから離隔する方向)に延び、基部61xの下側側面に接続している。接続部61dは、可動体62の昇降に伴って変形する。基部61xの上面には、凹部61bが形成されており、可動体62の下端と嵌合している。
【0046】
可動体62は、環状の剛材料(例えば、ステンレス)からなり、平面視でヘッド2の外周を取り囲んでいる。可動体62は、弾性体61に支持されて、ヘッドホルダ5に対して鉛直方向に相対移動可能である。可動体62は、複数のギア63と接続されている。制御部100による制御の下、昇降モータ64(図8参照)が駆動されると、ギア63が回転して可動体62が昇降する。このとき、基部61xも、共に昇降する。これにより、突出部61aの先端61a1と吐出面2aとの相対位置が、鉛直方向に変化する。本実施形態では、1つの昇降モータ64から、各キャップ60用の複数のギア63に対して、その駆動力が選択的に伝達される。
【0047】
突出部61aは、可動体62の昇降に伴って、先端61a1が搬送ベルト43の外周面に当接する当接位置(図6に示す位置)と、外周面から離隔した離隔位置(図7に示す位置)とを選択的に取る。当接位置では、吐出空間S1が、外部空間S2から隔離された封止状態となっている。また、離隔位置では、吐出空間S1が外部空間S2に対して開放された非封止状態となっている。このようなキャップ60、複数のギア63を含む伝達機構、ヘッドホルダ5、昇降モータ64、及び、搬送ベルト43によって、キャップ手段が構成されている。
【0048】
次に、図6を参照し、加湿空気供給機構50の構成について説明する。
【0049】
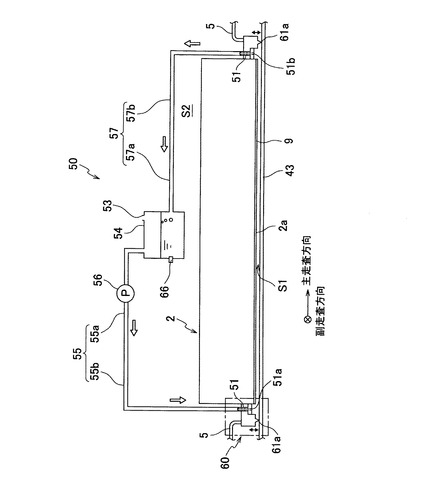
加湿空気供給機構50は、図6に示すように、一対のジョイント51、チューブ55,57、ポンプ56及びタンク54などを含む。チューブ55は、4つのヘッド2に共通の主部55a及び主部55aから分岐した4つの分岐部55bを含む。分岐部55bは、それぞれジョイント51と繋がる。ポンプ56は主部55aに設けられている。チューブ57も、チューブ55と同様に4つのヘッド2に共通の主部57a及び4つの分岐部57bを含む。分岐部57bも、それぞれジョイント51と繋がる。なお、図6では、1組の分岐部55b、57bと1つのヘッド2との接続状態が示されている。実際は、1つの主部55a、57aに対して、4つのヘッド2が分岐部55b、57bを介して並列的に接続されている。
【0050】
チューブ55の一端(分岐部55bの先端)は左側ジョイント51の先端部51yに嵌合し、他端はタンク54に接続されている。一方、チューブ57の一端(分岐部57bの先端)は右側ジョイント51の先端51yに嵌合し、他端はタンク54に接続されている。このように、チューブ55、57は、吐出空間S1とタンク54とを連通させている。ここで、キャップ60が封止状態にあるとき、ポンプ56による加湿空気の循環が可能となる。
【0051】
タンク(貯留部)54は、下部空間に水(加湿液)を貯留し、且つ、上部空間に、下部空間の水により加湿された加湿空気を貯蔵している。また、タンク54の上壁には、タンク54内と大気とを連通する大気連通孔53が形成されている。チューブ57は、タンク54の下部空間(水中)と連通している。一方、チューブ55は、タンク54の上部空間と連通している。なお、タンク54内の水がチューブ57に流れ込まないよう、チューブ57には図示しない逆止弁が取り付けられており、図6中白抜き矢印方向にのみ空気が流れるようになっている。
【0052】
タンク54の側壁には、センサ66が設けられている。センサ66は、鉛直方向に関して、チューブ57の接続口と同じ高さレベルにあり、タンク54内の水の有無を検出する。検出信号は、制御部100に出力される。例えば、タンク54内の水面が接続口と同じ高さ以下にあるとき、センサ66は、水が無いと検出する。水面が接続口の上にあるとき、センサ66は、水が有ると検出する。水がなければ、循環する空気によりインク増粘を助長する虞があるので、制御部100はインクの増粘防止動作(ポンプ56の駆動)を禁止する。水が有れば、空気の加湿は可能なので、制御部100は増粘防止動作を実行する。
【0053】
この構成において、増粘防止動作の加湿メンテナンスが実行されると、制御部100の制御により、ポンプ56が駆動され、図6に示すように、タンク54内の空気が白抜き矢印に沿って循環する。上部空間の加湿空気は、供給口51aから吐出空間S1に供給される。このとき、吐出空間S1は封止状態であるため、内部の空気が加湿空気に置換されながら排出口51bに向かって流れる。チューブ57はタンク54と水中で連通しているため、吐出空間S1内の空気は、タンク54で加湿される。生成された加湿空気は、ポンプ56の駆動が続く間、吐出空間S1に供給される。
【0054】
次に、図8を参照しつつ、制御部100について説明する。制御部100は、CPU(Central Processing Unit)と、CPUが実行するプログラム及びこれらプログラムに使用されるデータを書き替え可能に記憶するROM(Read Only Memory)と、プログラム実行時にデータを一時的に記憶するRAM(Random Access Memory)とを含んでいる。制御部100を構成する各機能部は、これらハードウェアとROM内のソフトウェアとが協働して構築されている。図8に示すように、制御部100は、搬送制御部141と、画像データ記憶部142と、ヘッド制御部143と、メンテナンス制御部150と、時間計測部151、記憶部152とを有している。
【0055】
搬送制御部141は、外部装置から受信した印刷指令に基づいて、用紙Pが搬送方向に沿って所定速度で搬送されるように、給紙部23、ガイド部10a,10b、及び、搬送機構40の各動作を制御する。画像データ記憶部142は、外部装置からの印刷指令に含まれる画像データを記憶する。ヘッド制御部143は、搬送機構40に搬送された用紙Pに画像データ記憶部142に記憶された画像データに係る画像が印刷されるように、及び、フラッシング動作が行われるようにヘッド2を制御する。
【0056】
時間計測部(計測手段)151は、各種制御部によるイベントの完了時点、及び各時点間の時間等を計時する。例えば、イベントには、画像データに基づく印刷、キャップ手段によるキャッピング、加湿空気供給機構による加湿メンテナンス、制御部100による印刷指令の受信等が含まれる。計時される時点間の時間には、待機時間がある。待機時間は、加湿メンテナンス完了時点から印刷指令受信時点までの時間であるが、タンク54内に水がない場合には、メンテナンス制御部150が加湿動作を禁止した時点から印刷指令受信時点までの時間である。
【0057】
記憶部152は、初期状態として、フラッシング動作の基本データ(基本フラッシングデータ)を記憶している。本実施の形態では、フラッシング動作は、不吐出フラッシングと吐出フラッシングから構成される。基本データには、不吐出フラッシング及び吐出フラッシングでのアクチュエータの駆動回数に関する情報が含まれている。この駆動回数は、全アクチュエータに共通である。フラッシングデータは、書き換え可能であり、必要に応じて初期状態に戻せる。
【0058】
メンテナンス制御部150は、キャッピング及び加湿メンテナンスによる増粘防止動作を行う際に、可動体62(突出部61aの先端61a1)を昇降させる昇降モータ64、及び、加湿空気供給機構50のポンプ56の駆動を制御する。このとき、メンテナンス制御部150は、センサ66がタンク54内に水が有ることを検出している場合、所定の加湿メンテナンスを行う。一方、センサ66がタンク54内に水が無いことを検出した場合、メンテナンス制御部150は、加湿動作を禁止する(すなわち、ポンプ56を駆動しない)。なお、センサ66による水の有無の検出は、キャッピング中に行われる。さらに、加湿メンテナンスの前には、少なくとも1回の検出が行われる。
【0059】
また、メンテナンス制御部150は、加湿メンテナンスが終了してから印刷指令を受信するまでに、センサ66がタンク54内に水が有ることを検出している場合、所定時間毎に加湿メンテナンスを繰り返す。このときに、センサ66がタンク54内に水が無いことを検出した場合、メンテナンス制御部150は、加湿動作を禁止する。
【0060】
また、印刷の実行に際して、メンテナンス制御部150は、センサ66がタンク54内に水があることを検出したときに、フラッシング動作を行うように、ヘッド制御部143を介してアクチュエータを制御する。メンテナンス制御部150は、センサ66が水の無いことを検出したときにも、待機時間が第2所定時間以下であれば、フラッシング動作を行う制御を行う。フラッシング動作は、印刷に係る準備動作であって、記憶部152に記憶されたフラッシングデータに基づいて行われる。本実施形態のフラッシング動作としては、不吐出フラッシングの後、キャッピングの解除を挟んで、吐出フラッシングが行われる。つまり、印刷指令を受信すると、キャッピング状態のまま不吐出フラッシングが行われ、その後、キャッピングの解除及び搬送ベルト43への吐出フラッシングと続く。このとき、吐出フラッシングによるインク吐出量は、センサ66による検出結果によって異なる。メンテナンス制御部150は、センサ66が水の無いことを検出した場合は、水が有ることを検出した場合よりもインク吐出量が増加する。具体的には、吐出フラッシングにおけるインク滴の吐出回数を増加させる。このとき、メンテナンス制御部150によって、記憶部152にあるフラッシングデータが書き換えられる。例えば、タンク54内に水が有る場合(初期状態のフラッシングデータ)に比べて、1000回の吐出回数の増加が指示される。変形例として、1回の吐出による液適量を増加させてもよい。この場合は、同じ吐出回数でもインク吐出量は増加する。
【0061】
また、別の変形例として、フラッシング動作において、上述の実施形態の吐出フラッシングの後に、さらに不吐出フラッシング及び吐出フラッシングを繰り返し行ってもよい。こうすれば、吐出フラッシングによる増粘インクの排出、及び、不吐出フラッシングの振動による増粘インクの撹拌が複数回に亘って繰り返されることによって、吐出口108からの液体吐出性能をより一層効果的に回復させることが可能となる。
【0062】
また、メンテナンス制御部150は、印刷の実行に際して、待機時間が第1所定時間よりも長くなるほど、吐出フラッシングによるインク吐出量を増加する。インク吐出量の増加は、吐出回数の増加により実現される。このとき、メンテナンス制御部150によって、記憶部152にある吐出フラッシングデータが書き換えられる。例えば、メンテナンス制御部150は、待機時間が第1所定時間よりも10分長くなる毎に、100回の回数加算を指示する。なお、メンテナンス制御部150は、待機時間が第1所定時間以下の場合、その時点で記憶部152に記憶されているフラッシングデータ(不吐出フラッシングデータ及び吐出フラッシングデータを含む)に基づいて、アクチュエータの駆動を制御する。例えば、センサ66が水の有ることを検出した場合、メンテナンス制御部150は、基本フラッシングデータに基づく制御を行う。センサ66が水の無いことを検出した場合、メンテナンス制御部150は、吐出フラッシングデータが書き換えられたフラッシングデータに基づく制御を行う。変形例として、第1所定時間はゼロであってもよい。こうすれば、時間が経過する度に、吐出フラッシングの液体吐吐出回数が増加する。
【0063】
また、メンテナンス制御部150は、センサ66が水の無いことを検出し、待機時間が第2所定時間よりも長くなると、記憶部152に記憶されたフラッシングデータをパージ動作が行われるデータに書き換える。この後、メンテナンス制御部150は、記憶部152に記憶されたデータに基づいて、フラッシング動作に代えてパージ動作及びワイピング動作を行うように、ポンプ38、ヘッド昇降機構33及びワイパユニット36を制御する。なお、パージ動作によるインク排出量は、吐出フラッシングによるインク吐出量よりも大幅に多い。
【0064】
また、メンテナンス制御部150は、温度センサ28によって検出された温度が所定温度よりも高くなるほど、吐出フラッシングによるインク吐出量が増加するように、液体吐出回数を増加させる。このとき、メンテナンス制御部150によって、記憶部152にある吐出フラッシングデータが書き換えられる。例えば、メンテナンス制御部150は、温度が所定温度よりも1℃高くなる毎に、100回の回数加算を指示する。変形例として、所定温度はゼロであってもよい。こうすれば、温度が高くなるほど、吐出フラッシングの液体吐吐出回数が増加する。
【0065】
また、メンテナンス制御部150は、湿度センサ29によって検出された湿度が所定湿度よりも低くなるほど、吐出フラッシングによるインク吐出量が増加するように、液体吐出回数を増加させる。このとき、メンテナンス制御部150によって、記憶部152にある吐出フラッシングデータが書き換えられる。例えば、メンテナンス制御部150は、湿度が所定湿度よりも5%低くなる毎に、100回の回数加算を指示する。変形例として、所定湿度は100%であってもよい。こうすれば、湿度が低くなるほど、吐出フラッシングの液体吐吐出回数が増加する。
【0066】
また、メンテナンス制御部150は、吐出フラッシング及びパージ動作が行われた後に、搬送ベルト43のクリーニング動作を行う。このとき、メンテナンス制御部150は、洗浄液塗布部材37a及びブレード37bを当接位置に移動させるように、移動機構37cを制御するとともに、搬送制御部141を介して搬送ベルト43を時計回りに走行させるように、搬送機構40を制御する。これにより、搬送ベルト43の外周面に洗浄液が塗布され、外周面上のインクが、洗浄液と共にブレード37bに掻き取られる。
【0067】
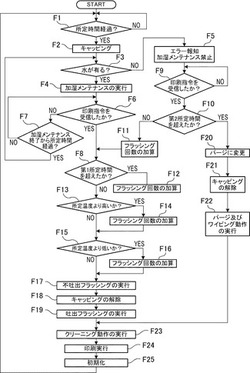
次に、図9を参照し、メンテナンス動作に係るプリンタ1の一連の動作フローについて説明する。なお、この図9の動作フローの開始時における状態は、印刷終了後の待機状態である。印刷終了時点より、時間計測部151が計時を始める。
【0068】
まず、制御部100が、時間計測部151による計時結果に基づいて、先の印刷が終了した時から所定時間経過したか否かを判定する(F1)。所定時間経過していないと判定した場合には、ステップF1の処理に戻る。なお、所定時間経過する前に外部装置から印刷指令を受信した際には、搬送制御部141及びヘッド制御部143によって当該印刷指令に基づく印刷が行われる。
【0069】
一方、所定時間経過したと判定した場合には、メンテナンス制御部150が、昇降モータ64を制御して吐出面2aをキャッピング(吐出空間S1を封止状態に)する(F2)。次に、ステップF3において、制御部100が、センサ66の出力からタンク54内に水があるか否かを判定する。水が有るとステップF4に進み、水が無いとステップF5に進む。
【0070】
ステップF4においては、メンテナンス制御部150が、ポンプ56を駆動し、所定時間の加湿メンテナンスを行う。これにより、吐出空間S1が加湿空気で満たされ、吐出口108近傍のインクの乾燥が抑制される。この後、ステップF6に進む。
【0071】
ステップF6においては、制御部100が、印刷指令を受信したか否かを判定する。印刷指令を受信した場合、ステップF8に進み、印刷指令を受信していない場合はステップF7に進む。ステップF7においては、制御部100が、加湿メンテナンスが終了してから所定時間が経過したか否か判定し、経過していない場合はステップF6に戻り、経過した場合はステップF3に戻る。ステップF3に戻ったとき、制御部100が水が有ると判定した場合、上述と同様にステップF4に進み、再度加湿メンテナンスが行われる。
【0072】
ステップF5においては、制御部100が、ユーザに水が無いことを知らせるための音を発する(エラー報知)ようにブザー27を制御するとともに、メンテナンス制御部150が、加湿メンテナンスを禁止する。これにより、ユーザに水(加湿液)が無くなっていることを報知することが可能となる。
【0073】
次に、ステップF9において、制御部100が、印刷指令を受信したか否かを判定する。この判定は、印刷指令を受信するまで継続される。制御部100は、印刷指令を受信すると、ステップF10に進む。ステップF10においては、制御部100が、時間計測部151の計時結果より、待機時間が第2所定時間を超えているか否かを判定する。このときの待機時間は、加湿メンテナンスの禁止時点(ステップF5)から指令受信時点(ステップF9)までの経過時間である。
【0074】
ここで、待機時間が第2所定時間以下の場合、ステップF11に進む。ステップF11では、メンテナンス制御部150が、記憶部152にあるフラッシングデータを書き換える。例えば、吐出フラッシングでの吐出回数が、1000回増やされる。吐出回数の加算処理の後、制御部100は、ステップF8に進む。一方、待機時間が第2所定時間を超えた場合、制御部100は、ステップF20に進む。
【0075】
ステップF8においては、制御部100が、待機時間が第2所定時間よりも短い第1所定時間を超えたか否かを判定する。そして、待機時間が第1所定時間を超えた場合、ステップF12に進み、第1所定時間以下の場合、ステップF13に進む。ステップF12においては、メンテナンス制御部150が、待機時間が第1所定時間よりも長くなるほど、吐出フラッシングによる液体吐出回数が増加するように、記憶部152のフラッシングデータを書き換える。例えば、現状の吐出回数に、待機時間が第1所定時間よりも10分長くなる毎に、吐出回数を100回ずつ加算していく。そして、ステップF13に進む。
【0076】
ステップF13においては、制御部100が、温度センサ28によって検出された温度が所定温度よりも高いか否かを判定する。そして、所定温度よりも高い場合、ステップF14に進み、所定温度以下の場合、ステップF15に進む。ステップF14においては、メンテナンス制御部150が、検出された温度が所定温度よりも高くなるほど、吐出フラッシングによる液体吐出回数が増加するように、記憶部152のフラッシングデータを書き換える。例えば、現状の吐出回数に、温度が1℃高くなる毎に、吐出回数を100回ずつ加算していく。そして、ステップF15に進む。
【0077】
ステップF15においては、制御部100が、湿度センサ29によって検出された湿度が所定湿度よりも低いか否かを判定する。そして、所定湿度よりも低い場合、ステップF16に進み、所定湿度以上の場合、ステップF17に進む。ステップF16においては、メンテナンス制御部150が、検出された湿度が所定湿度よりも低くなるほど、吐出フラッシングによる液体吐出回数が増加するように、記憶部152のフラッシングデータを書き換える。例えば、現状の吐出回数に、湿度が5%低くなる毎に、吐出回数を100回ずつ加算していく。そして、ステップF17に進む。
【0078】
ステップF17においては、メンテナンス制御部150が、ヘッド2のアクチュエータを制御して不吐出フラッシングを実行する。次にステップF18において、メンテナンス制御部150が、昇降モータ64を制御してキャッピングを解除し吐出空間S1を非封止状態にする。このときも、不吐出フラッシングは継続して行われている。
【0079】
次に、ステップF19において、メンテナンス制御部150が、記憶部152に記憶されたフラッシングデータに基づいた吐出フラッシング動作を行う。つまり、ステップF3でタンク54内に水が有ると判定された場合、及び、ステップF10で待機時間が第2所定時間以下の場合は、メンテナンス制御部150が、ヘッド2のアクチュエータを制御して、設定された吐出回数だけ各吐出口108から搬送ベルト43上にインク滴を吐出させる(吐出フラッシング)。
【0080】
次に、ステップF20においては、メンテナンス制御部150が、吐出フラッシングに代えてパージ動作を行うように、記憶部152のフラッシングデータをパージ動作が行われるデータに書き換える。そして、ステップF21に進む。
【0081】
次に、ステップF21においては、ステップF18と同様に、メンテナンス制御部150が、昇降モータ64を制御してキャッピングを解除し吐出空間S1を非封止状態にする。その後、ステップF22において、メンテナンス制御部150が、加圧のパージ及びワイピング動作を行う。つまり、メンテナンス制御部150が、ポンプ38を制御して、すべての吐出口108からインクを強制的に排出させる(パージ動作)。変形例として、凹形状のキャップ部材で吐出面2aを覆って吐出空間S1を封止状態とし、当該吐出空間S1の圧力を吐出口108に形成されたインクメニスカス耐圧よりも低い負圧にしてもよい。こうすることで、吐出口108内のインクを吸引パージすることが可能となる。
【0082】
メンテナンス制御部150は、図10(a)に示すように、パージ動作を行った後、ヘッド昇降機構33を制御して4つのヘッド2を印刷位置から退避位置に移動させる。この後、図10(b)に示すように、メンテナンス制御部150は、ワイパユニット36を制御して吐出面2aをワイパ36aで払拭する(ワイピング動作)。そして、メンテナンス制御部150は、ワイピング動作が終了すると、ヘッド昇降機構33を制御して、4つのヘッド2を印刷位置に戻す。
【0083】
次に、ステップF23において、メンテナンス制御部150が、移動機構37cを制御して洗浄液塗布部材37a及びブレード37bを当接位置に移動させるとともに、搬送制御部141を介して搬送機構40を制御し、搬送ベルト43を時計回りに走行させる。これにより、搬送ベルト43の外周面に洗浄液が塗布され、外周面上のインクが、洗浄液と共にブレード37bに掻き取られる(クリーニング動作)。
【0084】
次に、ステップF24において、搬送制御部141及びヘッド制御部143によって、ステップF6,F9において受信した印刷指令に基づく印刷が行われる。次に、ステップF25において、制御部100が、記憶部152に記憶されたデータを初期化する(初期状態に戻される)。こうして、ステップF1の処理に戻る。
【0085】
以上に述べたように、本実施形態のプリンタ1によると、タンク54内の水(加湿液)が無い場合は、吐出口108からの吐出フラッシングにおけるインク排出量が、水がある時よりも多くなるため、吐出口108近傍の増粘したインクを効果的に排出することが可能となる。このため、吐出口108からの液体吐出性能を回復させることが可能となる。したがって、印刷指令に基づいて形成された画像の品質を維持することが可能となる。加えて、タンク54内の水が無くなり、ユーザがタンク54内に水を補充するまで(加湿メンテナンスが可能になるまで)の間において、吐出口108の液体吐出性能を回復させ、当該ヘッド2により形成された画像の品質を維持することができる。
【0086】
また、加湿メンテナンスを行う前においてタンク54内の水が無くなった場合は、加湿メンテナンスを禁止している。これにより、加湿されていない空気が封止状態の吐出空間S1に供給されなくなり、吐出口近傍のインクの乾燥が助長されなくなる。
【0087】
また、待機時間が第1所定時間よりも長くなるほど、吐出フラッシングによるインク排出量が多くなるため、待機時間が長くなっても、吐出口108からの液体吐出性能をより効果的に回復させることが可能となる。
【0088】
また、温度が所定温度よりも高くなるほど、吐出フラッシングによるインク排出量が多くなるため、温度が高くなっても、吐出口108からの液体吐出性能をより効果的に回復させることが可能となる。
【0089】
また、湿度が所定湿度よりも低くなるほど、吐出フラッシングによるインク排出量が多くなるため、湿度が低くなっても、吐出口108からの液体吐出性能をより効果的に回復させることが可能となる。
【0090】
また、フラッシング動作において、吐出フラッシングの前に不吐出フラッシングを行うため、吐出口108からの液体吐出性能をより効果的に回復させることが可能となる。
【0091】
タンク54内に水が無く、待機時間が第2所定時間を超える場合に、吐出フラッシングに代えてパージ動作が行われる。このため、吐出口108近傍のインクの乾燥が進んでいても、パージ動作によって確実に吐出口108からの液体吐出性能を回復させることが可能となる。
【0092】
以上、本発明の好適な実施の形態について説明したが、本発明は上述の実施の形態に限られるものではなく、特許請求の範囲に記載した限りにおいて様々な変更が可能なものである。例えば、上述の実施形態においては、タンク54内の水が無くなると、吐出フラッシングにおけるインク排出量が、水が有るときよりも多くなっているが、水がない場合は、待機時間に拘わらず吐出フラッシングに代えてパージ動作を行ってもよい。この場合、パージ動作におけるインク排出量は、吐出フラッシングよりも非常に多いため、吐出口108近傍の増粘したインクを効果的に排出することが可能となる。したがって、上述と同様な効果を得ることができる。また、第2所定時間を超えても吐出フラッシングに代えてパージ動作を行わなくてもよい。また、不吐出フラッシングが行われていなくてもよい。また、温度及び湿度センサ28,29が設けられていなくてもよい。これらの場合は、制御が簡単になる。
上述の実施形態では、第2所定時間について、時間計測の起点を加湿メンテナンスの禁止時点(ステップF5)としたが、先の印刷完了直後には水が無いと判定された場合、キャップ手段によるキャッピング完了時点(ステップF2)を起点としてもよい。
【0093】
また、吐出空間S1を封止状態と非封止状態とに取り得るキャップ手段として、吐出面2aと対向する底部及びこの底部の周縁に立設された環状部を有するキャップと、環状部の先端が吐出面2aと当接する位置及び吐出面2aから離隔した位置にキャップを移動させる移動機構とを含んで構成されていてもよい。この場合、キャップの底部に加湿空気を供給する供給口と排出口とが設けられていてもよい。
【0094】
本発明は、ライン式・シリアル式のいずれにも適用可能であり、また、プリンタに限定されず、ファクシミリやコピー機等にも適用可能であり、さらに、インク以外の液体を吐出させることで記録を行う液体吐出装置にも適用可能である。記録媒体は、用紙Pに限定されず、記録可能な様々な媒体であってよい。さらに、本発明は、インクの吐出方式にかかわらず適用できる。例えば、本実施の形態では、圧電素子を用いたが、抵抗加熱方式でも、静電容量方式でもよい。
【符号の説明】
【0095】
1 インクジェットプリンタ(液体吐出装置)
2 インクジェットヘッド(液体吐出ヘッド)
27 ブザー(報知手段)
28 温度センサ(温度検出手段)
29 湿度センサ(湿度検出手段)
38 ポンプ(強制排出手段)
50 加湿空気供給機構
54 タンク(貯留部)
100 制御部(制御手段)
108 吐出口
151 時間計測部(計測手段)
S1 吐出空間
S2 外部空間
【技術分野】
【0001】
本発明は、液体を吐出する液体吐出装置に関する。
【背景技術】
【0002】
液体吐出装置は、インク等の液体を吐出する吐出口が開口した吐出面を有するヘッドを備えている。この吐出口から液体が吐出されない状況が長時間続くと、吐出口近傍の液体の水分が蒸発して増粘し、吐出口に目詰まりが生じる。この吐出口の目詰まりを抑制するための技術として、例えば、下記特許文献1に記載された技術が知られている。
【0003】
特許文献1に記載された技術では、凹状のキャッピング部によって吐出面を覆うことで、外部空間から隔てられた吐出空間を形成する。そして、キャッピング部の底面に空気供給口及び空気排出口が形成された空気流路を有する空調装置により、加湿した空気を空気供給口から吐出空間内に供給し、且つ吐出空間内の空気を空気排出口から排出することで吐出口近傍の液体を加湿している。こうして、吐出口近傍の液体の乾燥が抑制され、吐出口の目詰まりが抑制される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−212138号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載の技術において、空調装置が、例えば、加湿液を用いて加湿空気の湿度を調整している場合、当該加湿液が無くなると、空気の湿度を調整することができなくなる。この状態で、湿度調整がされていない空気が吐出空間内に供給されると、吐出口近傍の液体の水分が蒸発して粘性が増加する。つまり、吐出口に詰まりが生じ、吐出不良が生じるという問題がある。
【0006】
そこで、本発明の目的は、加湿液がない状態においても、吐出口からの液体吐出性能を回復させることが可能な液体吐出装置を提供することである。
【課題を解決するための手段】
【0007】
本発明の液体吐出装置は、液体を吐出するための吐出口が形成された液体吐出ヘッドと、前記吐出口と対向する吐出空間が外部空間から封止された封止状態と、前記吐出空間が前記外部空間に対して開放された非封止状態とを取り得るキャップ手段と、加湿空気を生成するための加湿液が貯留された貯留部を有し、加湿空気を生成するとともに前記封止状態の前記吐出空間内に加湿空気を供給する加湿動作を行う加湿空気供給機構と、前記吐出口から液体を排出させる排出手段と、前記吐出空間を前記封止状態とするように前記キャップ手段を制御した後に前記加湿動作を行うように前記加湿空気供給機構を制御するとともに、前記加湿動作後の待機状態において、印刷指令を受信すると、前記吐出空間を前記非封止状態とするように前記キャップ手段を制御した後に前記吐出口から液体を排出させる液体排出動作を行うように前記排出手段を制御する制御手段と、前記貯留部内の加湿液の有無を検出する検出手段とを備えている。そして、前記制御手段は、前記キャップ手段が前記吐出空間を前記封止状態としてから前記加湿空気供給機構が前記加湿動作を開始するまでに、前記検出手段が前記貯留部内の加湿液が無いことを検出した場合、前記加湿液が有ると検出したときよりも、前記液体排出動作における前記吐出口からの液体排出量が多くなるように、前記排出手段を制御する。
【発明の効果】
【0008】
本発明の液体吐出装置によると、加湿液がない状態で加湿動作を行っていた場合においても、吐出口からの液体吐出性能を回復させることが可能となる。そのため、印刷指令に基づいて形成された画像の品質を維持することが可能となる。
【図面の簡単な説明】
【0009】
【図1】本発明の液体吐出装置の一実施形態によるインクジェットプリンタの内部構造を示す概略側面図である。
【図2】図1のプリンタに含まれるインクジェットヘッドのヘッド本体を示す平面図である。
【図3】図2の一点鎖線で囲まれた領域を示す拡大図である。
【図4】図3に示すIV−IV線に沿った部分断面図である。
【図5】図4の一点鎖線で囲まれた領域を示す拡大図である。
【図6】図1のプリンタに含まれるヘッドホルダ及び加湿空気供給機構を示す概略図である。
【図7】図6の一点鎖線で囲まれた領域を示す部分断面図であり、キャップが離隔位置にある状況を示す図である。
【図8】図1に示す制御部の機能ブロック図である。
【図9】図1のプリンタの制御部が実行するメンテナンス動作に関する一連の動作フローを示すフローチャート図である。
【図10】ワイピング動作を説明するための動作状況図である。
【発明を実施するための形態】
【0010】
以下、本発明の好適な実施の形態について、図面を参照しつつ説明する。
【0011】
先ず、図1を参照し、本発明の液体吐出装置の一実施形態であるインクジェットプリンタ1の全体構成について説明する。
【0012】
プリンタ1は、直方体形状の筐体1aを有する。筐体1aの天板上部には、排紙部4が設けられている。筐体1aの内部空間は、上から順に空間A,B,Cに区分できる。空間A,Bには、給紙部23から排紙部4に向かう用紙搬送経路が形成されており、図1に示す黒太矢印に沿って用紙Pが搬送される。空間Aでは、用紙Pへの画像形成と、用紙Pの排紙部4への搬送が行われる。空間Bでは、用紙Pの搬送経路への給紙が行われる。空間Cからは、空間Aのインクジェットヘッド2に対するインク供給が行われる。
【0013】
空間Aには、4つのインクジェットヘッド2(以下、ヘッド2と称する)、搬送機構40、用紙Pをガイドする2つのガイド部10a,10b、加湿メンテナンスに用いられる加湿空気供給機構50(図6参照)、ヘッド昇降機構33(図8参照)、ワイパユニット36(図8参照)、クリーナユニット37、ブザー27(図8参照)、温度センサ28(図8参照)、湿度センサ29(図8参照)、及び、制御部100等が配置されている。なお、温度センサ28及び湿度センサ29は、ヘッド2近傍に配置されており、検出した温度及び湿度を示す信号を制御部100に出力する。また、ブザー27は、制御部100近傍に配置されている。
【0014】
4つのヘッド2からは、マゼンタ、イエロー、シアン、ブラックのいずれかのインク滴が吐出される。これら4つのヘッド2は、主走査方向に長尺な略直方体形状を有する。また、4つのヘッド2は、副走査方向に所定ピッチで並び、ヘッドホルダ5を介して筐体1aに支持されている。ヘッドホルダ5によって、ヘッド2の下面と搬送ベルト43(搬送機構40)との間には、記録に適した所定の間隙が形成される。
【0015】
各ヘッド2は、ヘッド本体3に加えて、アクチュエータユニット21、リザーバユニット、フレキシブルプリント配線基板(FPC)、制御基板等が積層された積層体である。ヘッド本体3(流路ユニット9)の下面は、吐出口108が開口しており、吐出面2aである。制御基板で調整された信号は、FPC上のドライバICで駆動信号に変換され、さらにアクチュエータユニット21に出力される。アクチュエータユニット21が駆動されると、リザーバユニットから供給されたインクが、吐出口108から吐出されることになる。
【0016】
加湿空気供給機構50を構成するキャップ60が、ヘッドホルダ5に取り付けられている。キャップ60は、ヘッド2毎に配設された環状部材であって、平面視でヘッド2を内包する。キャップ60の構成、動作、機能等は、後に詳述する。
【0017】
ヘッド昇降機構33は、ヘッドホルダ5を昇降させ、4つのヘッド2が印刷位置と退避位置の間で移動する。印刷位置では、4つのヘッド2が搬送ベルト43と印刷に適した間隔で対向する。退避位置では、4つのヘッド2が搬送ベル43から印刷位置以上の間隔で離隔する。退避位置では、4つのヘッド2と搬送ベルト43との間の空間を、ワイパユニット36が移動可能である。
【0018】
ワイパユニット36は、4つのワイパ36a(図10参照)を有し、各吐出面2aを払拭する。ワイパ36aは、ゴムなどの板状弾性部材である。なお、図10においては、1のワイパ36aのみ示している。ワイパユニット36は、ワイパ36aを、ヘッド2の吐出面2aに接触させつつ主走査方向に沿って移動させることによって、吐出面2aを払拭する。
【0019】
クリーナユニット37は、洗浄液塗布部材37a、ブレード37b及びこれらを移動させる移動機構37c(図8参照)を有し、搬送ベルト43の外周面をクリーニングする。クリーナユニット37は、図1に示すように、搬送ベルト43の右下方であって、ベルトローラ42に対向して配置されている。洗浄液塗布部材37aは、多孔質体(例えば、スポンジ)とこれを支持する支持部材から構成され、ブレード37bは、板状弾性部材(例えば、ゴム)で構成される。共に、搬送ベルト43を全幅に亘って接触可能である。後述のクリーニング動作において、移動機構37cは、洗浄液塗布部材37a及びブレード37bを搬送ベルト43の外周面に当接する。搬送ベルト43が走行すると、多孔質体から外周面に洗浄液が塗布され、下流側のブレード37bにより洗浄液が外周面の汚れと共に掻き取られる。
【0020】
搬送機構40は、2つのベルトローラ41,42と、搬送ベルト43と、プラテン46と、ニップローラ47と、剥離プレート45とを有している。搬送ベルト43は、両ローラ41,42の間に巻回されたエンドレスのベルトである。プラテン46は、4つのヘッド2に対向配置され、搬送ベルト43の上側ループを内側から支える。ベルトローラ42は、駆動ローラであって、搬送ベルト43を走行させる。ベルトローラ42は、図示しないモータによって、図1中時計回りに回転される。ベルトローラ41は、従動ローラであって、搬送ベルト43の走行によって回転される。搬送ベルト43の外周面には、弱粘着性のシリコン層が形成されている。ニップローラ47は、給紙部23から搬送されてきた用紙Pを搬送ベルト43の外周面に押さえ付ける。用紙Pは、シリコン層によって搬送ベルト43に保持され、ヘッド2に向かって搬送される。剥離プレート45は、搬送されてきた用紙Pを搬送ベルト43から剥離し、下流側の排紙部4へと導く。
【0021】
2つのガイド部10a,10bは、搬送機構40を挟んで配置されている。搬送方向上流側のガイド部10aは、2つのガイド31a,31bと送りローラ対32とを有し、給紙部23と搬送機構40とを繋ぐ。画像形成用の用紙Pが、搬送機構40に向けて搬送される。搬送方向下流側のガイド部10bは、2つのガイド33a,33bと2つの送りローラ対34,35とを有し、搬送機構40と排紙部4とを繋ぐ。画像形成後の用紙Pが、排紙部4に向けて搬送される。
【0022】
空間Bには、給紙部23が配置されている。給紙部23は、給紙トレイ24及び給紙ローラ25を有する。このうち、給紙トレイ24が、筐体1aに対して着脱可能となっている。給紙トレイ24は、上方に開口する箱であり、複数の用紙Pを収納可能である。給紙ローラ25は、給紙トレイ24内で最も上方にある用紙Pを送り出す。
【0023】
ここで、副走査方向とは、搬送機構40によって搬送される用紙搬送方向Dと平行な方向であり、主走査方向とは、水平面に平行且つ副走査方向に直交する方向である。
【0024】
空間Cには、インクを貯留する4つのカートリッジ22が筐体1aに着脱可能に配置されている。4つのカートリッジ22には、マゼンタ、シアン、イエロー、及びブラックのインクが貯留されており、対応するヘッド2にチューブ(不図示)及びポンプ38(図8参照)を介して接続されている。なお、各ポンプ38(強制排出手段:排出手段の一部)は、ヘッド2にインクを強制的に送るとき(すなわち、パージ動作や液体の初期導入が行われるとき)に制御部100によって駆動される。これ以外は停止状態にあり、ヘッド2のインク供給を妨げない。
【0025】
次に、制御部100について説明する。制御部100は、プリンタ1各部の動作を制御してプリンタ1全体の動作を司る。制御部100は、外部装置(プリンタ1と接続されたPC等)から供給された印刷指令に基づいて、画像形成動作を制御する。具体的には、制御部100は、用紙Pの搬送動作、用紙Pの搬送に同期したインク吐出動作等を制御する。
【0026】
制御部100は、外部装置から受信した印刷指令に基づいて、給紙部23、搬送機構40、及び、各送りローラ対32,34,35を駆動する。給紙トレイ24から送り出された用紙Pは、上流側ガイド部10aによりガイドされ搬送機構40に送られる。搬送機構40によって搬送される用紙Pは、ヘッド2のすぐ下方を通過する際に、制御部100によってヘッド2が制御され、各ヘッド2からインク滴が順に吐出される。これにより、用紙Pの表面に所望のカラー画像が形成される。インクの吐出動作は、用紙センサ26からの検知信号に基づく。用紙センサ26は、ヘッド2よりも搬送方向Dの上流に配置されており、用紙Pの先端を検知する。インクの吐出タイミングは、検知信号により決められる。そして、画像が形成された用紙Pは、剥離プレート45によって搬送ベルト43から剥離された後、下流側ガイド部10bによりガイドされて、筐体1a上部から排紙部4に排出される。
【0027】
制御部100はまた、ヘッド2のインク吐出特性の回復を行うメンテナンス動作を制御する。制御部100は、メンテナンス動作によって、ヘッド2のインク吐出特性の回復・維持や記録に係わる準備を行う。メンテナンス動作には、パージやフラッシング動作、吐出面2aのワイピング動作、搬送ベルト43のクリーニング動作、キャッピングや加湿によるインクの増粘防止動作等が含まれる。
【0028】
パージ動作では、ポンプ38が駆動されて、全ての吐出口108からインクが強制的に排出される。このとき、アクチュエータは駆動されない。フラッシング動作には、吐出フラッシングと、不吐出フラッシングとがある。吐出フラッシングでは、アクチュエータが駆動されて、全ての吐出口108からインクが吐出される。不吐出フラッシングでは、アクチュエータが駆動されて、吐出口108からインクを吐出することなく吐出口108に形成されたインクメニスカスが振動される。吐出フラッシングは、吐出フラッシングデータ(画像データと異なるデータ)に基づいて行われる。不吐出フラッシングにおいても、不吐出フラッシングデータに基づいて行われる。ワイピング動作では、吐出面2aがワイパ36a(図10参照)によって払拭される。ワイピング動作は、パージ動作後に行われ、吐出面2a上の残留インクや異物が取り除かれる。また、クリーニング動作では、搬送ベルト43がクリーナユニット37によって払拭される。クリーニング動作は、パージ及び吐出フラッシング後に行われ、搬送ベルト43上のインクや異物が除去される。
【0029】
キャッピングでは、図6に示すように、キャップ60により吐出空間(吐出面2a(吐出口108)と対向する空間)S1が外部空間S2から隔離される。加湿動作(加湿メンテナンス)では、図6に示すように、隔離された吐出空間S1に加湿空気が供給される。キャッピングにより、吐出空間S1内に水蒸気が留まり、加湿により乾燥がさらに抑制される。
【0030】
次に、図2〜図5を参照しつつヘッド2のヘッド本体3について詳細に説明する。図3では説明の都合上、アクチュエータユニット21の下方にあって破線で描くべき圧力室110、アパーチャ112及び吐出口108を実線で描いている。
【0031】
ヘッド本体3は、図2に示すように、流路ユニット9の上面に4つのアクチュエータユニット21が固定された積層体である。流路ユニット9の下面が、吐出面2aである。流路ユニット9の内部にはインク流路が形成され、アクチュエータユニット21はこの流路内のインクに吐出エネルギーを付与する。
【0032】
流路ユニット9は、図4に示すように、ステンレス製の9枚の金属プレート122〜130を積層した積層体である。流路ユニット9の上面には、図2に示すように、リザーバユニットに連通する計10個のインク供給口105bが開口している。流路ユニット9の内部には、図2〜図4に示すように、インク供給口105bを一端とするマニホールド流路105、及び、マニホールド流路105から分岐した複数の副マニホールド流路105aが形成されている。さらに、各副マニホールド流路105aの出口から圧力室110を経て吐出口108に至る複数の個別インク流路132が形成されている。吐出面2aに形成された多数の吐出口108は、マトリクス状に配置されており、主走査方向(一方向)に関してこの方向の解像度である600dpiの間隔で配列されている。
【0033】
図2〜図4に示すように、リザーバユニットからインク供給口105bに供給されたインクは、マニホールド流路105(副マニホールド流路105a)に流入する。副マニホールド流路105a内のインクは、各個別インク流路132に分配され、アパーチャ112及び圧力室110を経て吐出口108に至る。
【0034】
次に、アクチュエータユニット21について説明する。図2に示すように、4つのアクチュエータユニット21は、それぞれ台形の平面形状を有しており、インク供給口105bを避けるよう主走査方向に千鳥状に配置されている。さらに、各アクチュエータユニット21の平行対向辺は主走査方向に沿っており、隣接するアクチュエータユニット21の斜辺同士は副走査方向に沿って重なっている。
【0035】
図5に示すように、アクチュエータユニット21は、強誘電性を有するチタン酸ジルコン酸鉛(PZT)系セラミックス製の3枚の圧電層161〜163から構成されたピエゾ式アクチュエータである。最上層の圧電層161は、厚み方向に分極されている。また、圧電層161の上面には、複数の個別電極135が形成されている。個別電極135は、圧力室110と対向している。個別電極135の先端には、個別ランド136が設けられている。圧電層161とその下側の圧電層162との間には、界面全体に形成された共通電極134が介在している。なお、共通電極134には、すべての圧力室110に対応する領域において、等しくグランド電位が付与されている。一方、個別電極135には、個別ランド136を介して駆動信号が選択的に供給される。
【0036】
個別電極135を共通電極134と異なる電位にすると、個別電極135と圧力室110とで挟まれた部分が、圧力室110に対して変形する。このように個別電極135に対応した部分が、個別のアクチュエータ(排出手段の一部)として働く。つまり、アクチュエータユニット21には、圧力室110に対応した数のアクチュエータが作り込まれており、それぞれ圧力室110内のインクに選択的に吐出エネルギーを与える。
【0037】
ここで、アクチュエータユニット21の駆動方法について述べる。アクチュエータユニット21は、圧力室110から離れた上側1枚の圧電層161を駆動活性部(両電極134,135に挟まれた部分)が含まれる層とし、且つ圧力室110に近い下側2枚の圧電層162、163を非活性層とした、いわゆるユニモルフタイプのアクチュエータである。例えば、分極方向と電界の印加方向とが同じであれば、駆動活性部は、分極方向に直交する方向(平面方向)に縮む。このとき、下方の圧電層162、163に対して、平面方向への歪みに差が生じるので、圧電層161〜163全体(個別のアクチュエータ)が、圧力室110側へ凸に変形(ユニモルフ変形)する。これにより圧力室110内のインクに圧力(吐出エネルギー)が付与され、吐出口108からインク滴が吐出される。
【0038】
なお、本実施形態においては、個別電極135の電位が、予め所定の電位が付与されているところ、駆動信号が供給されて、一旦グランド電位となり、その後の所定のタイミングで再び所定電位に復帰する。個別電極135がグランド電位となるタイミングでは、圧電層161〜163が元の状態に戻り、圧力室110の容積が増加するので、副マニホールド流路105aから個別インク流路132へとインクが吸い込まれる。また、再び個別電極135に所定の電位が付与されたタイミングでは、圧電層161〜163において個別のアクチュエータ部分が圧力室110側に凸となるように変形し、圧力室110の容積が低下(インクの圧力が上昇)するので、吐出口108からインク滴が吐出される。
【0039】
次に、図6及び図7を参照し、ヘッドホルダ5及びこれに取り付けられたキャップ手段の構成について説明する。
【0040】
ヘッドホルダ5は、金属等からなる枠状フレームであり、ヘッド2の側面を全周に亘って支持している。ヘッドホルダ5には、キャップ60と一対のジョイント51とが取り付けられている。キャップ60及びジョイント51は、共に加湿空気供給機構50の構成部材であって、キャップ60が閉ざされた吐出空間S1を作り、空間内の空気がジョイント51を介して加湿空気と置換される。ここで、ヘッドホルダ5とヘッド2との当接部は、全周に亘って封止剤で封止されている。また、ヘッドホルダ5とキャップ60との当接部は、全周に亘って接着剤で固定されている。
【0041】
一対のジョイント51は、吐出空間S1に対する加湿空気の出入口である。一対のジョイント51は、図6に示すように、供給口51aを持つ左側ジョイント51と排出口51bを持つ右側ジョイント51とから構成され、ヘッド2を主走査方向に挟んで配置されている。加湿メンテナンスでは、吐出空間S1に対し、供給口51aから加湿空気が供給され、排出口51bから空気が排出される。
【0042】
ジョイント51は、方形状の基端部51x、及び、基端部51xから延出した円柱状の先端部51yを含んでいる。基端部51xの方が、先端部51yより外形サイズが大きい。基端部51xは、副走査方向を長手方向とし、その長手方向の幅(長さ)は、吐出面2aとほぼ同じになっている。内部には、図7に示すように、基端部51xから先端部51yに亘って、鉛直方向に沿った中空空間51zが形成されている。中空空間51zは、先端部51yでは円柱状空間であり、これに繋がる基端部51xでは供給口51aに向かって拡開する扇状空間である。供給口51aは、副走査方向に長い。
【0043】
ヘッドホルダ5には、平面視円形の貫通孔5aが形成されており、ジョイント51は、先端部51yが貫通孔5aに貫挿された状態で、ヘッドホルダ5に固定されている。先端部51yは、貫通孔5aよりも一回り小さいが、両者間の隙間には封止剤等が充填されて、封止される。
【0044】
キャップ60は、平面視でヘッド2の外周を取り囲む矩形の環状部材であり、主走査方向に長い。キャップ60は、図7に示すように、ヘッドホルダ5に支持された弾性体61、及び、昇降可能な可動体62を含む。
【0045】
弾性体61は、ゴム等の環状弾性材料からなり、平面視でヘッド2を囲んでいる。弾性体61は、図7に示すように、基部61x、基部61xの下面から突出した突出部61a、ヘッドホルダ5に固定された固定部61c、及び、基部61xと固定部61cとを接続する接続部61dを含む。このうち、突出部61aは、断面が三角形である。また、固定部61cは、断面がT字状である。固定部61cの上端部分は、接着剤等によって、ヘッドホルダ5に固定されている。固定部61cはまた、ヘッドホルダ5と各ジョイント51の基端部51xとで挟持されている。接続部61dは、固定部61cの下端から湾曲しつつ外側(平面視で吐出面2aから離隔する方向)に延び、基部61xの下側側面に接続している。接続部61dは、可動体62の昇降に伴って変形する。基部61xの上面には、凹部61bが形成されており、可動体62の下端と嵌合している。
【0046】
可動体62は、環状の剛材料(例えば、ステンレス)からなり、平面視でヘッド2の外周を取り囲んでいる。可動体62は、弾性体61に支持されて、ヘッドホルダ5に対して鉛直方向に相対移動可能である。可動体62は、複数のギア63と接続されている。制御部100による制御の下、昇降モータ64(図8参照)が駆動されると、ギア63が回転して可動体62が昇降する。このとき、基部61xも、共に昇降する。これにより、突出部61aの先端61a1と吐出面2aとの相対位置が、鉛直方向に変化する。本実施形態では、1つの昇降モータ64から、各キャップ60用の複数のギア63に対して、その駆動力が選択的に伝達される。
【0047】
突出部61aは、可動体62の昇降に伴って、先端61a1が搬送ベルト43の外周面に当接する当接位置(図6に示す位置)と、外周面から離隔した離隔位置(図7に示す位置)とを選択的に取る。当接位置では、吐出空間S1が、外部空間S2から隔離された封止状態となっている。また、離隔位置では、吐出空間S1が外部空間S2に対して開放された非封止状態となっている。このようなキャップ60、複数のギア63を含む伝達機構、ヘッドホルダ5、昇降モータ64、及び、搬送ベルト43によって、キャップ手段が構成されている。
【0048】
次に、図6を参照し、加湿空気供給機構50の構成について説明する。
【0049】
加湿空気供給機構50は、図6に示すように、一対のジョイント51、チューブ55,57、ポンプ56及びタンク54などを含む。チューブ55は、4つのヘッド2に共通の主部55a及び主部55aから分岐した4つの分岐部55bを含む。分岐部55bは、それぞれジョイント51と繋がる。ポンプ56は主部55aに設けられている。チューブ57も、チューブ55と同様に4つのヘッド2に共通の主部57a及び4つの分岐部57bを含む。分岐部57bも、それぞれジョイント51と繋がる。なお、図6では、1組の分岐部55b、57bと1つのヘッド2との接続状態が示されている。実際は、1つの主部55a、57aに対して、4つのヘッド2が分岐部55b、57bを介して並列的に接続されている。
【0050】
チューブ55の一端(分岐部55bの先端)は左側ジョイント51の先端部51yに嵌合し、他端はタンク54に接続されている。一方、チューブ57の一端(分岐部57bの先端)は右側ジョイント51の先端51yに嵌合し、他端はタンク54に接続されている。このように、チューブ55、57は、吐出空間S1とタンク54とを連通させている。ここで、キャップ60が封止状態にあるとき、ポンプ56による加湿空気の循環が可能となる。
【0051】
タンク(貯留部)54は、下部空間に水(加湿液)を貯留し、且つ、上部空間に、下部空間の水により加湿された加湿空気を貯蔵している。また、タンク54の上壁には、タンク54内と大気とを連通する大気連通孔53が形成されている。チューブ57は、タンク54の下部空間(水中)と連通している。一方、チューブ55は、タンク54の上部空間と連通している。なお、タンク54内の水がチューブ57に流れ込まないよう、チューブ57には図示しない逆止弁が取り付けられており、図6中白抜き矢印方向にのみ空気が流れるようになっている。
【0052】
タンク54の側壁には、センサ66が設けられている。センサ66は、鉛直方向に関して、チューブ57の接続口と同じ高さレベルにあり、タンク54内の水の有無を検出する。検出信号は、制御部100に出力される。例えば、タンク54内の水面が接続口と同じ高さ以下にあるとき、センサ66は、水が無いと検出する。水面が接続口の上にあるとき、センサ66は、水が有ると検出する。水がなければ、循環する空気によりインク増粘を助長する虞があるので、制御部100はインクの増粘防止動作(ポンプ56の駆動)を禁止する。水が有れば、空気の加湿は可能なので、制御部100は増粘防止動作を実行する。
【0053】
この構成において、増粘防止動作の加湿メンテナンスが実行されると、制御部100の制御により、ポンプ56が駆動され、図6に示すように、タンク54内の空気が白抜き矢印に沿って循環する。上部空間の加湿空気は、供給口51aから吐出空間S1に供給される。このとき、吐出空間S1は封止状態であるため、内部の空気が加湿空気に置換されながら排出口51bに向かって流れる。チューブ57はタンク54と水中で連通しているため、吐出空間S1内の空気は、タンク54で加湿される。生成された加湿空気は、ポンプ56の駆動が続く間、吐出空間S1に供給される。
【0054】
次に、図8を参照しつつ、制御部100について説明する。制御部100は、CPU(Central Processing Unit)と、CPUが実行するプログラム及びこれらプログラムに使用されるデータを書き替え可能に記憶するROM(Read Only Memory)と、プログラム実行時にデータを一時的に記憶するRAM(Random Access Memory)とを含んでいる。制御部100を構成する各機能部は、これらハードウェアとROM内のソフトウェアとが協働して構築されている。図8に示すように、制御部100は、搬送制御部141と、画像データ記憶部142と、ヘッド制御部143と、メンテナンス制御部150と、時間計測部151、記憶部152とを有している。
【0055】
搬送制御部141は、外部装置から受信した印刷指令に基づいて、用紙Pが搬送方向に沿って所定速度で搬送されるように、給紙部23、ガイド部10a,10b、及び、搬送機構40の各動作を制御する。画像データ記憶部142は、外部装置からの印刷指令に含まれる画像データを記憶する。ヘッド制御部143は、搬送機構40に搬送された用紙Pに画像データ記憶部142に記憶された画像データに係る画像が印刷されるように、及び、フラッシング動作が行われるようにヘッド2を制御する。
【0056】
時間計測部(計測手段)151は、各種制御部によるイベントの完了時点、及び各時点間の時間等を計時する。例えば、イベントには、画像データに基づく印刷、キャップ手段によるキャッピング、加湿空気供給機構による加湿メンテナンス、制御部100による印刷指令の受信等が含まれる。計時される時点間の時間には、待機時間がある。待機時間は、加湿メンテナンス完了時点から印刷指令受信時点までの時間であるが、タンク54内に水がない場合には、メンテナンス制御部150が加湿動作を禁止した時点から印刷指令受信時点までの時間である。
【0057】
記憶部152は、初期状態として、フラッシング動作の基本データ(基本フラッシングデータ)を記憶している。本実施の形態では、フラッシング動作は、不吐出フラッシングと吐出フラッシングから構成される。基本データには、不吐出フラッシング及び吐出フラッシングでのアクチュエータの駆動回数に関する情報が含まれている。この駆動回数は、全アクチュエータに共通である。フラッシングデータは、書き換え可能であり、必要に応じて初期状態に戻せる。
【0058】
メンテナンス制御部150は、キャッピング及び加湿メンテナンスによる増粘防止動作を行う際に、可動体62(突出部61aの先端61a1)を昇降させる昇降モータ64、及び、加湿空気供給機構50のポンプ56の駆動を制御する。このとき、メンテナンス制御部150は、センサ66がタンク54内に水が有ることを検出している場合、所定の加湿メンテナンスを行う。一方、センサ66がタンク54内に水が無いことを検出した場合、メンテナンス制御部150は、加湿動作を禁止する(すなわち、ポンプ56を駆動しない)。なお、センサ66による水の有無の検出は、キャッピング中に行われる。さらに、加湿メンテナンスの前には、少なくとも1回の検出が行われる。
【0059】
また、メンテナンス制御部150は、加湿メンテナンスが終了してから印刷指令を受信するまでに、センサ66がタンク54内に水が有ることを検出している場合、所定時間毎に加湿メンテナンスを繰り返す。このときに、センサ66がタンク54内に水が無いことを検出した場合、メンテナンス制御部150は、加湿動作を禁止する。
【0060】
また、印刷の実行に際して、メンテナンス制御部150は、センサ66がタンク54内に水があることを検出したときに、フラッシング動作を行うように、ヘッド制御部143を介してアクチュエータを制御する。メンテナンス制御部150は、センサ66が水の無いことを検出したときにも、待機時間が第2所定時間以下であれば、フラッシング動作を行う制御を行う。フラッシング動作は、印刷に係る準備動作であって、記憶部152に記憶されたフラッシングデータに基づいて行われる。本実施形態のフラッシング動作としては、不吐出フラッシングの後、キャッピングの解除を挟んで、吐出フラッシングが行われる。つまり、印刷指令を受信すると、キャッピング状態のまま不吐出フラッシングが行われ、その後、キャッピングの解除及び搬送ベルト43への吐出フラッシングと続く。このとき、吐出フラッシングによるインク吐出量は、センサ66による検出結果によって異なる。メンテナンス制御部150は、センサ66が水の無いことを検出した場合は、水が有ることを検出した場合よりもインク吐出量が増加する。具体的には、吐出フラッシングにおけるインク滴の吐出回数を増加させる。このとき、メンテナンス制御部150によって、記憶部152にあるフラッシングデータが書き換えられる。例えば、タンク54内に水が有る場合(初期状態のフラッシングデータ)に比べて、1000回の吐出回数の増加が指示される。変形例として、1回の吐出による液適量を増加させてもよい。この場合は、同じ吐出回数でもインク吐出量は増加する。
【0061】
また、別の変形例として、フラッシング動作において、上述の実施形態の吐出フラッシングの後に、さらに不吐出フラッシング及び吐出フラッシングを繰り返し行ってもよい。こうすれば、吐出フラッシングによる増粘インクの排出、及び、不吐出フラッシングの振動による増粘インクの撹拌が複数回に亘って繰り返されることによって、吐出口108からの液体吐出性能をより一層効果的に回復させることが可能となる。
【0062】
また、メンテナンス制御部150は、印刷の実行に際して、待機時間が第1所定時間よりも長くなるほど、吐出フラッシングによるインク吐出量を増加する。インク吐出量の増加は、吐出回数の増加により実現される。このとき、メンテナンス制御部150によって、記憶部152にある吐出フラッシングデータが書き換えられる。例えば、メンテナンス制御部150は、待機時間が第1所定時間よりも10分長くなる毎に、100回の回数加算を指示する。なお、メンテナンス制御部150は、待機時間が第1所定時間以下の場合、その時点で記憶部152に記憶されているフラッシングデータ(不吐出フラッシングデータ及び吐出フラッシングデータを含む)に基づいて、アクチュエータの駆動を制御する。例えば、センサ66が水の有ることを検出した場合、メンテナンス制御部150は、基本フラッシングデータに基づく制御を行う。センサ66が水の無いことを検出した場合、メンテナンス制御部150は、吐出フラッシングデータが書き換えられたフラッシングデータに基づく制御を行う。変形例として、第1所定時間はゼロであってもよい。こうすれば、時間が経過する度に、吐出フラッシングの液体吐吐出回数が増加する。
【0063】
また、メンテナンス制御部150は、センサ66が水の無いことを検出し、待機時間が第2所定時間よりも長くなると、記憶部152に記憶されたフラッシングデータをパージ動作が行われるデータに書き換える。この後、メンテナンス制御部150は、記憶部152に記憶されたデータに基づいて、フラッシング動作に代えてパージ動作及びワイピング動作を行うように、ポンプ38、ヘッド昇降機構33及びワイパユニット36を制御する。なお、パージ動作によるインク排出量は、吐出フラッシングによるインク吐出量よりも大幅に多い。
【0064】
また、メンテナンス制御部150は、温度センサ28によって検出された温度が所定温度よりも高くなるほど、吐出フラッシングによるインク吐出量が増加するように、液体吐出回数を増加させる。このとき、メンテナンス制御部150によって、記憶部152にある吐出フラッシングデータが書き換えられる。例えば、メンテナンス制御部150は、温度が所定温度よりも1℃高くなる毎に、100回の回数加算を指示する。変形例として、所定温度はゼロであってもよい。こうすれば、温度が高くなるほど、吐出フラッシングの液体吐吐出回数が増加する。
【0065】
また、メンテナンス制御部150は、湿度センサ29によって検出された湿度が所定湿度よりも低くなるほど、吐出フラッシングによるインク吐出量が増加するように、液体吐出回数を増加させる。このとき、メンテナンス制御部150によって、記憶部152にある吐出フラッシングデータが書き換えられる。例えば、メンテナンス制御部150は、湿度が所定湿度よりも5%低くなる毎に、100回の回数加算を指示する。変形例として、所定湿度は100%であってもよい。こうすれば、湿度が低くなるほど、吐出フラッシングの液体吐吐出回数が増加する。
【0066】
また、メンテナンス制御部150は、吐出フラッシング及びパージ動作が行われた後に、搬送ベルト43のクリーニング動作を行う。このとき、メンテナンス制御部150は、洗浄液塗布部材37a及びブレード37bを当接位置に移動させるように、移動機構37cを制御するとともに、搬送制御部141を介して搬送ベルト43を時計回りに走行させるように、搬送機構40を制御する。これにより、搬送ベルト43の外周面に洗浄液が塗布され、外周面上のインクが、洗浄液と共にブレード37bに掻き取られる。
【0067】
次に、図9を参照し、メンテナンス動作に係るプリンタ1の一連の動作フローについて説明する。なお、この図9の動作フローの開始時における状態は、印刷終了後の待機状態である。印刷終了時点より、時間計測部151が計時を始める。
【0068】
まず、制御部100が、時間計測部151による計時結果に基づいて、先の印刷が終了した時から所定時間経過したか否かを判定する(F1)。所定時間経過していないと判定した場合には、ステップF1の処理に戻る。なお、所定時間経過する前に外部装置から印刷指令を受信した際には、搬送制御部141及びヘッド制御部143によって当該印刷指令に基づく印刷が行われる。
【0069】
一方、所定時間経過したと判定した場合には、メンテナンス制御部150が、昇降モータ64を制御して吐出面2aをキャッピング(吐出空間S1を封止状態に)する(F2)。次に、ステップF3において、制御部100が、センサ66の出力からタンク54内に水があるか否かを判定する。水が有るとステップF4に進み、水が無いとステップF5に進む。
【0070】
ステップF4においては、メンテナンス制御部150が、ポンプ56を駆動し、所定時間の加湿メンテナンスを行う。これにより、吐出空間S1が加湿空気で満たされ、吐出口108近傍のインクの乾燥が抑制される。この後、ステップF6に進む。
【0071】
ステップF6においては、制御部100が、印刷指令を受信したか否かを判定する。印刷指令を受信した場合、ステップF8に進み、印刷指令を受信していない場合はステップF7に進む。ステップF7においては、制御部100が、加湿メンテナンスが終了してから所定時間が経過したか否か判定し、経過していない場合はステップF6に戻り、経過した場合はステップF3に戻る。ステップF3に戻ったとき、制御部100が水が有ると判定した場合、上述と同様にステップF4に進み、再度加湿メンテナンスが行われる。
【0072】
ステップF5においては、制御部100が、ユーザに水が無いことを知らせるための音を発する(エラー報知)ようにブザー27を制御するとともに、メンテナンス制御部150が、加湿メンテナンスを禁止する。これにより、ユーザに水(加湿液)が無くなっていることを報知することが可能となる。
【0073】
次に、ステップF9において、制御部100が、印刷指令を受信したか否かを判定する。この判定は、印刷指令を受信するまで継続される。制御部100は、印刷指令を受信すると、ステップF10に進む。ステップF10においては、制御部100が、時間計測部151の計時結果より、待機時間が第2所定時間を超えているか否かを判定する。このときの待機時間は、加湿メンテナンスの禁止時点(ステップF5)から指令受信時点(ステップF9)までの経過時間である。
【0074】
ここで、待機時間が第2所定時間以下の場合、ステップF11に進む。ステップF11では、メンテナンス制御部150が、記憶部152にあるフラッシングデータを書き換える。例えば、吐出フラッシングでの吐出回数が、1000回増やされる。吐出回数の加算処理の後、制御部100は、ステップF8に進む。一方、待機時間が第2所定時間を超えた場合、制御部100は、ステップF20に進む。
【0075】
ステップF8においては、制御部100が、待機時間が第2所定時間よりも短い第1所定時間を超えたか否かを判定する。そして、待機時間が第1所定時間を超えた場合、ステップF12に進み、第1所定時間以下の場合、ステップF13に進む。ステップF12においては、メンテナンス制御部150が、待機時間が第1所定時間よりも長くなるほど、吐出フラッシングによる液体吐出回数が増加するように、記憶部152のフラッシングデータを書き換える。例えば、現状の吐出回数に、待機時間が第1所定時間よりも10分長くなる毎に、吐出回数を100回ずつ加算していく。そして、ステップF13に進む。
【0076】
ステップF13においては、制御部100が、温度センサ28によって検出された温度が所定温度よりも高いか否かを判定する。そして、所定温度よりも高い場合、ステップF14に進み、所定温度以下の場合、ステップF15に進む。ステップF14においては、メンテナンス制御部150が、検出された温度が所定温度よりも高くなるほど、吐出フラッシングによる液体吐出回数が増加するように、記憶部152のフラッシングデータを書き換える。例えば、現状の吐出回数に、温度が1℃高くなる毎に、吐出回数を100回ずつ加算していく。そして、ステップF15に進む。
【0077】
ステップF15においては、制御部100が、湿度センサ29によって検出された湿度が所定湿度よりも低いか否かを判定する。そして、所定湿度よりも低い場合、ステップF16に進み、所定湿度以上の場合、ステップF17に進む。ステップF16においては、メンテナンス制御部150が、検出された湿度が所定湿度よりも低くなるほど、吐出フラッシングによる液体吐出回数が増加するように、記憶部152のフラッシングデータを書き換える。例えば、現状の吐出回数に、湿度が5%低くなる毎に、吐出回数を100回ずつ加算していく。そして、ステップF17に進む。
【0078】
ステップF17においては、メンテナンス制御部150が、ヘッド2のアクチュエータを制御して不吐出フラッシングを実行する。次にステップF18において、メンテナンス制御部150が、昇降モータ64を制御してキャッピングを解除し吐出空間S1を非封止状態にする。このときも、不吐出フラッシングは継続して行われている。
【0079】
次に、ステップF19において、メンテナンス制御部150が、記憶部152に記憶されたフラッシングデータに基づいた吐出フラッシング動作を行う。つまり、ステップF3でタンク54内に水が有ると判定された場合、及び、ステップF10で待機時間が第2所定時間以下の場合は、メンテナンス制御部150が、ヘッド2のアクチュエータを制御して、設定された吐出回数だけ各吐出口108から搬送ベルト43上にインク滴を吐出させる(吐出フラッシング)。
【0080】
次に、ステップF20においては、メンテナンス制御部150が、吐出フラッシングに代えてパージ動作を行うように、記憶部152のフラッシングデータをパージ動作が行われるデータに書き換える。そして、ステップF21に進む。
【0081】
次に、ステップF21においては、ステップF18と同様に、メンテナンス制御部150が、昇降モータ64を制御してキャッピングを解除し吐出空間S1を非封止状態にする。その後、ステップF22において、メンテナンス制御部150が、加圧のパージ及びワイピング動作を行う。つまり、メンテナンス制御部150が、ポンプ38を制御して、すべての吐出口108からインクを強制的に排出させる(パージ動作)。変形例として、凹形状のキャップ部材で吐出面2aを覆って吐出空間S1を封止状態とし、当該吐出空間S1の圧力を吐出口108に形成されたインクメニスカス耐圧よりも低い負圧にしてもよい。こうすることで、吐出口108内のインクを吸引パージすることが可能となる。
【0082】
メンテナンス制御部150は、図10(a)に示すように、パージ動作を行った後、ヘッド昇降機構33を制御して4つのヘッド2を印刷位置から退避位置に移動させる。この後、図10(b)に示すように、メンテナンス制御部150は、ワイパユニット36を制御して吐出面2aをワイパ36aで払拭する(ワイピング動作)。そして、メンテナンス制御部150は、ワイピング動作が終了すると、ヘッド昇降機構33を制御して、4つのヘッド2を印刷位置に戻す。
【0083】
次に、ステップF23において、メンテナンス制御部150が、移動機構37cを制御して洗浄液塗布部材37a及びブレード37bを当接位置に移動させるとともに、搬送制御部141を介して搬送機構40を制御し、搬送ベルト43を時計回りに走行させる。これにより、搬送ベルト43の外周面に洗浄液が塗布され、外周面上のインクが、洗浄液と共にブレード37bに掻き取られる(クリーニング動作)。
【0084】
次に、ステップF24において、搬送制御部141及びヘッド制御部143によって、ステップF6,F9において受信した印刷指令に基づく印刷が行われる。次に、ステップF25において、制御部100が、記憶部152に記憶されたデータを初期化する(初期状態に戻される)。こうして、ステップF1の処理に戻る。
【0085】
以上に述べたように、本実施形態のプリンタ1によると、タンク54内の水(加湿液)が無い場合は、吐出口108からの吐出フラッシングにおけるインク排出量が、水がある時よりも多くなるため、吐出口108近傍の増粘したインクを効果的に排出することが可能となる。このため、吐出口108からの液体吐出性能を回復させることが可能となる。したがって、印刷指令に基づいて形成された画像の品質を維持することが可能となる。加えて、タンク54内の水が無くなり、ユーザがタンク54内に水を補充するまで(加湿メンテナンスが可能になるまで)の間において、吐出口108の液体吐出性能を回復させ、当該ヘッド2により形成された画像の品質を維持することができる。
【0086】
また、加湿メンテナンスを行う前においてタンク54内の水が無くなった場合は、加湿メンテナンスを禁止している。これにより、加湿されていない空気が封止状態の吐出空間S1に供給されなくなり、吐出口近傍のインクの乾燥が助長されなくなる。
【0087】
また、待機時間が第1所定時間よりも長くなるほど、吐出フラッシングによるインク排出量が多くなるため、待機時間が長くなっても、吐出口108からの液体吐出性能をより効果的に回復させることが可能となる。
【0088】
また、温度が所定温度よりも高くなるほど、吐出フラッシングによるインク排出量が多くなるため、温度が高くなっても、吐出口108からの液体吐出性能をより効果的に回復させることが可能となる。
【0089】
また、湿度が所定湿度よりも低くなるほど、吐出フラッシングによるインク排出量が多くなるため、湿度が低くなっても、吐出口108からの液体吐出性能をより効果的に回復させることが可能となる。
【0090】
また、フラッシング動作において、吐出フラッシングの前に不吐出フラッシングを行うため、吐出口108からの液体吐出性能をより効果的に回復させることが可能となる。
【0091】
タンク54内に水が無く、待機時間が第2所定時間を超える場合に、吐出フラッシングに代えてパージ動作が行われる。このため、吐出口108近傍のインクの乾燥が進んでいても、パージ動作によって確実に吐出口108からの液体吐出性能を回復させることが可能となる。
【0092】
以上、本発明の好適な実施の形態について説明したが、本発明は上述の実施の形態に限られるものではなく、特許請求の範囲に記載した限りにおいて様々な変更が可能なものである。例えば、上述の実施形態においては、タンク54内の水が無くなると、吐出フラッシングにおけるインク排出量が、水が有るときよりも多くなっているが、水がない場合は、待機時間に拘わらず吐出フラッシングに代えてパージ動作を行ってもよい。この場合、パージ動作におけるインク排出量は、吐出フラッシングよりも非常に多いため、吐出口108近傍の増粘したインクを効果的に排出することが可能となる。したがって、上述と同様な効果を得ることができる。また、第2所定時間を超えても吐出フラッシングに代えてパージ動作を行わなくてもよい。また、不吐出フラッシングが行われていなくてもよい。また、温度及び湿度センサ28,29が設けられていなくてもよい。これらの場合は、制御が簡単になる。
上述の実施形態では、第2所定時間について、時間計測の起点を加湿メンテナンスの禁止時点(ステップF5)としたが、先の印刷完了直後には水が無いと判定された場合、キャップ手段によるキャッピング完了時点(ステップF2)を起点としてもよい。
【0093】
また、吐出空間S1を封止状態と非封止状態とに取り得るキャップ手段として、吐出面2aと対向する底部及びこの底部の周縁に立設された環状部を有するキャップと、環状部の先端が吐出面2aと当接する位置及び吐出面2aから離隔した位置にキャップを移動させる移動機構とを含んで構成されていてもよい。この場合、キャップの底部に加湿空気を供給する供給口と排出口とが設けられていてもよい。
【0094】
本発明は、ライン式・シリアル式のいずれにも適用可能であり、また、プリンタに限定されず、ファクシミリやコピー機等にも適用可能であり、さらに、インク以外の液体を吐出させることで記録を行う液体吐出装置にも適用可能である。記録媒体は、用紙Pに限定されず、記録可能な様々な媒体であってよい。さらに、本発明は、インクの吐出方式にかかわらず適用できる。例えば、本実施の形態では、圧電素子を用いたが、抵抗加熱方式でも、静電容量方式でもよい。
【符号の説明】
【0095】
1 インクジェットプリンタ(液体吐出装置)
2 インクジェットヘッド(液体吐出ヘッド)
27 ブザー(報知手段)
28 温度センサ(温度検出手段)
29 湿度センサ(湿度検出手段)
38 ポンプ(強制排出手段)
50 加湿空気供給機構
54 タンク(貯留部)
100 制御部(制御手段)
108 吐出口
151 時間計測部(計測手段)
S1 吐出空間
S2 外部空間
【特許請求の範囲】
【請求項1】
液体を吐出するための吐出口が形成された液体吐出ヘッドと、
前記吐出口と対向する吐出空間が外部空間から封止された封止状態と、前記吐出空間が前記外部空間に対して開放された非封止状態とを取り得るキャップ手段と、
加湿空気を生成するための加湿液が貯留された貯留部を有し、加湿空気を生成するとともに前記封止状態の前記吐出空間内に加湿空気を供給する加湿動作を行う加湿空気供給機構と、
前記吐出口から液体を排出させる排出手段と、
前記吐出空間を前記封止状態とするように前記キャップ手段を制御した後に前記加湿動作を行うように前記加湿空気供給機構を制御するとともに、前記加湿動作後の待機状態において、印刷指令を受信すると、前記吐出空間を前記非封止状態とするように前記キャップ手段を制御した後に前記吐出口から液体を排出させる液体排出動作を行うように前記排出手段を制御する制御手段と、
前記貯留部内の加湿液の有無を検出する検出手段とを備えており、
前記制御手段は、前記キャップ手段が前記吐出空間を前記封止状態としてから前記加湿空気供給機構が前記加湿動作を開始するまでに、前記検出手段が前記貯留部内の加湿液が無いことを検出した場合、前記加湿液が有ると検出したときよりも、前記液体排出動作における前記吐出口からの液体排出量が多くなるように、前記排出手段を制御することを特徴とする液体吐出装置。
【請求項2】
前記制御手段は、前記キャップ手段が前記吐出空間を前記封止状態としてから前記加湿空気供給機構が前記加湿動作を開始するまでに、前記検出手段が前記貯留部内の加湿液が無いことを検出した場合、前記加湿動作を禁止するように前記加湿空気供給機構を制御することを特徴とする請求項1に記載の液体吐出装置。
【請求項3】
前記排出手段は、前記液体吐出ヘッド内の液体に圧力を付与することで、前記吐出口から液滴を吐出させるアクチュエータを有しており、
前記制御手段は、前記液体排出動作として前記吐出口から液滴を吐出させる吐出フラッシングを行うように前記アクチュエータを制御することを特徴とする請求項1又は2に記載の液体吐出装置。
【請求項4】
前記印刷指令を受信するまでの前記待機状態の時間を計測する計測手段をさらに備えており、
前記制御手段は、前記計測手段によって計測された前記時間が長くなるに連れて、前記吐出フラッシングにおける液体排出量が多くなるように、前記アクチュエータを制御することを特徴とする請求項3に記載の液体吐出装置。
【請求項5】
前記液体吐出ヘッド周辺の湿度を検出する湿度検出手段をさらに備えており、
前記制御手段は、前記湿度検出手段が検出した湿度が低くなるに連れて、前記吐出フラッシングにおける液体排出量が多くなるように、前記アクチュエータを制御することを特徴とする請求項3又は4に記載の液体吐出装置。
【請求項6】
前記液体吐出ヘッド周辺の温度を検出する温度検出手段をさらに備えており、
前記制御手段は、前記温度検出手段が検出した温度が高くなるに連れて、前記吐出フラッシングにおける液体排出量が多くなるように、前記アクチュエータを制御することを特徴とする請求項3〜5のいずれか1項に記載の液体吐出装置。
【請求項7】
前記制御手段は、前記印刷指令を受信してから前記吐出フラッシングを行うまでに、前記吐出口から液体を吐出させることなく当該吐出口に形成された液体メニスカスを振動させる不吐出フラッシングを行うように、前記アクチュエータを制御することを特徴とする請求項3〜6のいずれか1項に記載の液体吐出装置。
【請求項8】
前記制御手段は、前記不吐出フラッシング及び前記吐出フラッシングが交互に繰り返し行われるように、前記アクチュエータを制御することを特徴とする請求項7に記載の液体吐出装置。
【請求項9】
前記印刷指令を受信するまでの前記待機状態の時間を計測する計測手段をさらに備えており、
前記排出手段は、前記液体吐出ヘッドに液体を送液する又は前記吐出口内の液体を吸引することで、前記吐出口から液体を強制的に排出するパージ動作を行う強制排出手段をさらに有しており、
前記制御手段は、前記キャップ手段が前記吐出空間を前記封止状態としてから前記加湿空気供給機構が前記加湿動作を開始するまでに、前記検出手段が前記貯留部内の加湿液が無いことを検出した場合、前記計測手段によって計測された前記時間が所定時間以下のときには、前記吐出フラッシングを行うように前記アクチュエータを制御し、前記計測手段によって計測された前記時間が前記所定時間を超えるときには、前記パージ動作を行うように前記強制排出手段を制御することを特徴とする請求項3〜8のいずれか1項に記載の液体吐出装置。
【請求項10】
前記検出手段が前記貯留部内の加湿液が無いことを検出したときに、加湿液が無いことを報知する報知手段をさらに備えていることを特徴とする請求項1〜9のいずれか1項に記載の液体吐出装置。
【請求項1】
液体を吐出するための吐出口が形成された液体吐出ヘッドと、
前記吐出口と対向する吐出空間が外部空間から封止された封止状態と、前記吐出空間が前記外部空間に対して開放された非封止状態とを取り得るキャップ手段と、
加湿空気を生成するための加湿液が貯留された貯留部を有し、加湿空気を生成するとともに前記封止状態の前記吐出空間内に加湿空気を供給する加湿動作を行う加湿空気供給機構と、
前記吐出口から液体を排出させる排出手段と、
前記吐出空間を前記封止状態とするように前記キャップ手段を制御した後に前記加湿動作を行うように前記加湿空気供給機構を制御するとともに、前記加湿動作後の待機状態において、印刷指令を受信すると、前記吐出空間を前記非封止状態とするように前記キャップ手段を制御した後に前記吐出口から液体を排出させる液体排出動作を行うように前記排出手段を制御する制御手段と、
前記貯留部内の加湿液の有無を検出する検出手段とを備えており、
前記制御手段は、前記キャップ手段が前記吐出空間を前記封止状態としてから前記加湿空気供給機構が前記加湿動作を開始するまでに、前記検出手段が前記貯留部内の加湿液が無いことを検出した場合、前記加湿液が有ると検出したときよりも、前記液体排出動作における前記吐出口からの液体排出量が多くなるように、前記排出手段を制御することを特徴とする液体吐出装置。
【請求項2】
前記制御手段は、前記キャップ手段が前記吐出空間を前記封止状態としてから前記加湿空気供給機構が前記加湿動作を開始するまでに、前記検出手段が前記貯留部内の加湿液が無いことを検出した場合、前記加湿動作を禁止するように前記加湿空気供給機構を制御することを特徴とする請求項1に記載の液体吐出装置。
【請求項3】
前記排出手段は、前記液体吐出ヘッド内の液体に圧力を付与することで、前記吐出口から液滴を吐出させるアクチュエータを有しており、
前記制御手段は、前記液体排出動作として前記吐出口から液滴を吐出させる吐出フラッシングを行うように前記アクチュエータを制御することを特徴とする請求項1又は2に記載の液体吐出装置。
【請求項4】
前記印刷指令を受信するまでの前記待機状態の時間を計測する計測手段をさらに備えており、
前記制御手段は、前記計測手段によって計測された前記時間が長くなるに連れて、前記吐出フラッシングにおける液体排出量が多くなるように、前記アクチュエータを制御することを特徴とする請求項3に記載の液体吐出装置。
【請求項5】
前記液体吐出ヘッド周辺の湿度を検出する湿度検出手段をさらに備えており、
前記制御手段は、前記湿度検出手段が検出した湿度が低くなるに連れて、前記吐出フラッシングにおける液体排出量が多くなるように、前記アクチュエータを制御することを特徴とする請求項3又は4に記載の液体吐出装置。
【請求項6】
前記液体吐出ヘッド周辺の温度を検出する温度検出手段をさらに備えており、
前記制御手段は、前記温度検出手段が検出した温度が高くなるに連れて、前記吐出フラッシングにおける液体排出量が多くなるように、前記アクチュエータを制御することを特徴とする請求項3〜5のいずれか1項に記載の液体吐出装置。
【請求項7】
前記制御手段は、前記印刷指令を受信してから前記吐出フラッシングを行うまでに、前記吐出口から液体を吐出させることなく当該吐出口に形成された液体メニスカスを振動させる不吐出フラッシングを行うように、前記アクチュエータを制御することを特徴とする請求項3〜6のいずれか1項に記載の液体吐出装置。
【請求項8】
前記制御手段は、前記不吐出フラッシング及び前記吐出フラッシングが交互に繰り返し行われるように、前記アクチュエータを制御することを特徴とする請求項7に記載の液体吐出装置。
【請求項9】
前記印刷指令を受信するまでの前記待機状態の時間を計測する計測手段をさらに備えており、
前記排出手段は、前記液体吐出ヘッドに液体を送液する又は前記吐出口内の液体を吸引することで、前記吐出口から液体を強制的に排出するパージ動作を行う強制排出手段をさらに有しており、
前記制御手段は、前記キャップ手段が前記吐出空間を前記封止状態としてから前記加湿空気供給機構が前記加湿動作を開始するまでに、前記検出手段が前記貯留部内の加湿液が無いことを検出した場合、前記計測手段によって計測された前記時間が所定時間以下のときには、前記吐出フラッシングを行うように前記アクチュエータを制御し、前記計測手段によって計測された前記時間が前記所定時間を超えるときには、前記パージ動作を行うように前記強制排出手段を制御することを特徴とする請求項3〜8のいずれか1項に記載の液体吐出装置。
【請求項10】
前記検出手段が前記貯留部内の加湿液が無いことを検出したときに、加湿液が無いことを報知する報知手段をさらに備えていることを特徴とする請求項1〜9のいずれか1項に記載の液体吐出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−35152(P2013−35152A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−171100(P2011−171100)
【出願日】平成23年8月4日(2011.8.4)
【出願人】(000005267)ブラザー工業株式会社 (13,856)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月4日(2011.8.4)
【出願人】(000005267)ブラザー工業株式会社 (13,856)
【Fターム(参考)】
[ Back to top ]