
液体噴射装置および医療機器
【課題】液体噴射装置の液体噴射を制御するアクチュエーターに対して、一定電圧の駆動信号を連続的に出力する場合にも効率よく駆動する。
【解決手段】液体噴射装置は、アクチュエーター116に対して駆動信号を印加することによって、液体を噴射する液体噴射装置であって、駆動信号の基準となる駆動波形信号WCOMを発生する駆動波形信号発生回路210と、駆動波形信号WCOMをパルス変調して変調信号MCOMを生成する変調回路220と、変調信号MCOMを電力増幅して電力増幅変調信号ACOMを生成するデジタル電力増幅器230と、電力増幅変調信号ACOMを平滑化することによって駆動信号COMを生成する平滑フィルター240と、を備え、変調回路220は、アクチュエーター116の電位を一定に保つ期間に、駆動波形信号WCOMの電圧値に応じて、キャリア周波数を変更する。
【解決手段】液体噴射装置は、アクチュエーター116に対して駆動信号を印加することによって、液体を噴射する液体噴射装置であって、駆動信号の基準となる駆動波形信号WCOMを発生する駆動波形信号発生回路210と、駆動波形信号WCOMをパルス変調して変調信号MCOMを生成する変調回路220と、変調信号MCOMを電力増幅して電力増幅変調信号ACOMを生成するデジタル電力増幅器230と、電力増幅変調信号ACOMを平滑化することによって駆動信号COMを生成する平滑フィルター240と、を備え、変調回路220は、アクチュエーター116の電位を一定に保つ期間に、駆動波形信号WCOMの電圧値に応じて、キャリア周波数を変更する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液体噴射装置および液体噴射装置を備えた医療機器において、液体の噴射を制御するアクチュエーターに駆動信号を印加して駆動する技術に関する。
【背景技術】
【0002】
医療用液体噴射装置(例えば、特許文献1参照)や液体噴射型印刷装置(インクジェットプリンター)のように、アクチュエーターに駆動信号を印加することによって液体を噴射する液体噴射装置は数多く存在する。このような液体噴射装置のアクチュエーターを駆動するためには、ある程度の電力を有する駆動信号が必要となる。そこで、駆動信号の元となる駆動波形信号を電力増幅することによって駆動信号を生成することが行われる。ここで、アナログの駆動波形信号をアナログ的に電力増幅してアナログの駆動信号を直接生成したのでは大きな電力損失が発生して電力効率が低下するので、いわゆるD級増幅器を用いて電力増幅する技術が提案されている(例えば、特許文献2、特許文献3参照)。
【0003】
D級増幅器は、次のようにして電力増幅を行う。先ず、アナログの駆動波形信号をパルス変調することによって変調信号を生成する。パルス変調には幾つかの方式が知られているが、パルス幅変調と呼ばれる方式が使用されることが一般的である。パルス幅変調と呼ばれる方式とは、変調しようとする駆動波形信号を、一定周期(変調周期)で繰り返される三角波形と比較して、駆動波形信号の電圧の方が三角波形の電圧よりも高い期間ではハイを出力し、逆に駆動波形信号の電圧の方が低い期間ではローを出力することによって、ハイとローとを繰り返す変調信号を生成する変調方式である。このようにして得られた変調信号は、駆動波形信号の電圧が高くなるほど、一変調周期内でのハイの期間の比率(オンデューティー比又はデューティー比。本明細書中ではデューティー比と呼ぶ)が高くなる。詳細は後述するが、デューティー比は駆動波形信号の電圧値又は駆動信号の電圧値と一対一の関係にある。
【0004】
D級増幅器では、パルス変調によって得られたデジタルの変調信号を電力増幅した後、平滑フィルターを通してアナログ信号に変換することによって、電力増幅された駆動信号を生成する。このようにしてデジタルの変調信号を電力増幅すれば、アナログの駆動波形信号をアナログのまま電力増幅する場合に比べて電力損失を大幅に低減することができるので、駆動信号を生成する際の電力損失を大幅に低減することが可能である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−071088号公報
【特許文献2】特開平11−204850号公報
【特許文献3】特開2007−96364号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、D級増幅器を用いてアクチュエーターを駆動する場合、アクチュエーターに対して一定電圧の駆動信号を連続的に出力する状態において、駆動波形信号の電圧値がある条件(詳細は後述する)になる場合は、増幅時に大きな電力損失が発生することがあった。その結果、アクチュエーターを駆動する際の電力効率が低下する場合があるという問題があった。
【0007】
この発明は、従来の技術が有する上述した課題の少なくとも一部を解決するためになされたものであり、アクチュエーターに対して一定電圧の駆動信号を連続的に出力する状態においても、駆動波形信号の電圧値(又は駆動信号の電圧値、又はデューティー比)によらず、どのような条件下でも常に効率よく液体噴射装置のアクチュエーターを駆動することが可能な技術の提供を目的とする。
【課題を解決するための手段】
【0008】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0009】
[適用例1]アクチュエーターに対して駆動信号を印加することによって、液体を噴射する液体噴射装置であって、前記駆動信号の基準となる駆動波形信号を発生する駆動波形信号発生回路と、前記駆動波形信号をパルス変調して変調信号を生成する変調回路と、前記変調信号を電力増幅して電力増幅変調信号を生成するデジタル電力増幅器と、前記電力増幅変調信号を平滑化することによって前記駆動信号を生成する平滑フィルターと、を備え、前記変調回路は、前記アクチュエーターの電位を一定に保つ期間に、前記駆動波形信号の電圧値に応じて、キャリア周波数を変更することを特徴とする液体噴射装置。
【0010】
これによれば、上記液体噴射装置において、液体の噴射を制御するアクチュエーターに対して一定の駆動信号を連続的に出力する状態で、かつどのような駆動波形信号の電圧値(又は駆動信号の電圧値、又はデューティー比)の条件である場合にも、デジタル電力増幅器に大きな電力損失が発生することを回避することが可能となる。
【0011】
詳細なメカニズムについては後述するが、アクチュエーターに一定の電圧を連続的に出力する状態で、かつ駆動波形信号の電圧値(又は駆動信号の電圧値、又はデューティー比)が後述する第一の電圧値より低いか又は後述する第二の電圧値より高い場合に、デジタル電力増幅器に大きな電力損失が発生することが見いだされた。更に、上述した条件下では、変調回路がパルス変調する際のキャリア周波数を変更することによって、デジタル電力増幅器における電力損失の増加を回避することが可能であることも見いだされた。従って、アクチュエーターに一定の電圧を連続的に出力している状態で、かつ駆動波形信号の電圧値が所定値より低いか又は所定値より高い場合には、キャリア周波数を変更することで、デジタル電力増幅器での増幅時に大きな電力損失が発生することを回避して、効率よく液体噴射装置のアクチュエーターを駆動することが可能となる。
【0012】
[適用例2]上記に記載の液体噴射装置であって、前記変調回路は、前記駆動波形信号の電圧値が予め定められた所定の電圧値よりも小さい範囲にある場合に、前記キャリア周波数を、前記所定の電圧値以上の範囲で設定される基準キャリア周波数よりも低いキャリア周波数に設定することを特徴とする。
【0013】
これによれば、適用例1の液体噴射装置のアクチュエーターに一定の電圧を連続的に出力する状態で、かつ駆動波形信号の電圧値が後述する所定の電圧値(又はデューティー比、又は駆動信号電圧値)より小さい場合にも、デジタル電力増幅器での増幅時に大きな電力損失が発生することを回避して、効率よく液体噴射装置のアクチュエーターを駆動することが可能となる。
【0014】
[適用例3]上記に記載の液体噴射装置であって、前記変調回路は、前記駆動波形信号の電圧値が予め定められた所定の電圧値よりも大きい範囲にある場合に、前記キャリア周波数を、前記所定の電圧値以下の範囲で設定される基準キャリア周波数よりも低いキャリア周波数に設定することを特徴とする。
【0015】
これによれば、適用例1の液体噴射装置のアクチュエーターに一定の電圧を連続的に出力する状態で、かつ駆動波形信号の電圧値が後述する所定の電圧値(又はデューティー比、又は駆動信号の電圧値)より大きい場合にも、デジタル電力増幅器での増幅時に大きな電力損失が発生することを回避して、効率よく液体噴射装置のアクチュエーターを駆動することが可能となる。
【0016】
[適用例4]上記に記載の液体噴射装置であって、前記変調回路は、第一の電圧値と、前記第一の電圧値よりも大きい第二の電圧値とが予め定められており、前記駆動波形信号の電圧値が前記第一の電圧値よりも小さい場合に、前記キャリア周波数を、前記第一の電圧値から前記第二の電圧値までの範囲で設定される基準キャリア周波数よりも低い第一のキャリア周波数に設定し、前記駆動波形信号の電圧値が前記第二の電圧値よりも大きい場合に、前記キャリア周波数を、前記基準キャリア周波数よりも低い第二のキャリア周波数に設定することを特徴とする。
【0017】
これによれば、適用例1の液体噴射装置のアクチュエーターに一定の電圧を連続的に出力する状態で、駆動波形信号の電圧値が後述する第一の電圧値より小さい場合や、駆動波形信号の電圧値が後述する第二の電圧値より大きい場合にも、デジタル電力増幅器での増幅時に大きな電力損失が発生することを回避して、効率よく液体噴射装置のアクチュエーターを駆動することが可能となる。
【0018】
[適用例5]上記記載の液体噴射装置を備えたことを特徴とする医療機器。
【0019】
これによれば、上記記載の液体噴射装置を備えた医療機器においても、該液体噴射装置のアクチュエーターに一定の電圧を連続的に出力する状態で、どのような駆動波形信号の電圧値(又は変調信号のデューティー比、又は駆動信号の電圧値)の場合にも、デジタル電力増幅器での増幅時に大きな電力損失が発生することを回避して、効率よく医療機器に備えた液体噴射装置のアクチュエーターを駆動することが可能となる。
【図面の簡単な説明】
【0020】
【図1】第1実施例の液体噴射装置の構成を示した説明図。
【図2】第1実施例の液体噴射装置に搭載されたアクチュエーター駆動回路の回路構成を示した説明図。
【図3】一定電圧のCOMを連続的に出力する場合に、デジタル電力増幅器における電力損失が、デューティー比に応じて増加する様子を示した説明図。
【図4】デジタル電力増幅器の詳細な構成を示した回路図。
【図5】一定電圧のCOMを出力した場合に、平滑フィルターのコイルに流れる電流がほぼ直線的に変化する様子を示した説明図。
【図6】一定電圧のCOMを出力した場合に、平滑フィルターのコイルに流れる電流がほぼ直線的に変化する理由を示した説明図。
【図7】一定電圧のCOMを出力した場合に、平滑フィルターのコイルに流れる電流の振幅が、デューティー比に応じて変化する様子を示した説明図。
【図8】デジタル電力増幅器の動作が切り換わる際のACOMの様子を示した説明図。
【図9】一定電圧のCOMを出力した場合に、平滑フィルターのコイルに大きな電流が流れる条件では、電力増幅時の電力損失が低下する理由を示した説明図。
【図10】一定電圧のCOMを出力した場合に、平滑フィルターのコイルに大きな電流が流れる条件では、電力増幅時の電力損失が低下する理由を示した説明図。
【図11】デジタル電力増幅器での電力増幅時に電力損失が発生する理由を示した説明図。
【図12】COMの電圧傾きが小さい場合の、平滑フィルターのコイルに流れる電流波形の例を示した説明図。
【図13】抵抗性負荷のアクチュエーターに一定電圧のCOMを連続的に出力した場合の、平滑フィルターのコイルに流れる電流の様子を示した説明図。
【図14】第1実施例の液体噴射装置の構成の一部を示した説明図。
【図15】第1実施例の液体噴射装置のデジタル電力増幅器において、電力損失の増加を回避可能な理由を示した説明図。
【図16】第1実施例で駆動波形信号情報にフラグが設定された態様を示した説明図。
【図17】DC判別信号設定処理を示した説明図。
【図18】電圧レベル判別信号設定処理を示した説明図。
【図19】電圧レベル判別信号設定処理を示した説明図。
【図20】キャリア周波数変更手段の構成例を示した説明図。
【図21】第1実施例で駆動波形信号情報にフラグが設定されたその他の態様を示した説明図。
【図22】第1実施例の変形例の液体噴射装置の一部を示した説明図。
【図23】第1実施例の変形例における、キャリア周波数設定信号書込み処理を示した説明図。
【図24】第1実施例の変形例2の液体噴射装置の一部を示した説明図。
【図25】第2実施例において、デジタル電力増幅器における電力損失の増加を回避可能な理由を示した説明図。
【図26】第2実施例における4bitのflagと、選択されるキャリア周波数との関係を示したテーブルの例を示した説明図。
【図27】第2実施例における電圧レベル判別手段が、電圧レベル判別信号を設定する電圧レベル判別信号設定処理の一例を示した説明図。
【図28】第2実施例におけるDC判別信号および電圧レベル判別信号と、キャリア周波数設定信号との対応関係を示したテーブルの説明図。
【図29】第2実施例のキャリア周波数変更手段における、キャリア周波数切り換え処理の例を示した説明図。
【図30】第1実施例と比較して、第2実施例では、COMに重畳するキャリアリップルを抑制しながら、デジタル電力増幅器での電力損失の増加を回避することが可能である様子を示した説明図。
【図31】第2実施例の変形例の液体噴射装置の一部を示した説明図。
【図32】第2実施例の変形例における、キャリア周波数切り換え処理の例を示した説明図。
【図33】第2実施例の変形例において、デジタル電力増幅器での電力損失の増加を回避可能な理由を示した説明図。
【図34】第1実施例、第2実施例およびそれぞれの変形例で説明した液体噴射装置を、インクジェットプリンターとして適用した場合の、噴射ヘッドの内部構造を示した説明図。
【図35】インクジェットプリンターのアクチュエーターであるピエゾ素子に印加する駆動信号の基となる駆動波形信号の例を示した説明図。
【発明を実施するための形態】
【0021】
以下では、上述した本願発明の内容を明確にするために、次のような順序に従って実施例を説明する。
A.第1実施例:
A−1.医療用液体噴射装置構成:
A−2.アクチュエーター駆動回路の回路構成:
A−3.デジタル電力増幅器で電力損失が発生するメカニズム:
A−4.デジタル電力増幅器での電力損失を回避するメカニズム:
A−5.第1実施例での電力損失の増加の回避方法:
A−6.第1実施例の変形例:
A−7.第1実施例の変形例2:
B.第2実施例:
B−1.第2実施例での電力損失の増加の回避方法:
B−2.第2実施例の変形例:
C.第3実施例:
C−1.液体噴射型印刷装置(インクジェットプリンター)構成:
C−2.第3実施例での電力損失の増加の回避方法:
【0022】
A.第1実施例:
A−1.医療用液体噴射装置構成:
図1は、第1実施例の液体噴射装置の構成を示した説明図である。図示されているように液体噴射装置100は、大きく分けると、液体を噴射するための脈動発生部110と、脈動発生部110に向けて流体を供給する流体供給手段120と、脈動発生部110および流体供給手段120の動作を制御する制御部130などから構成されている。液体噴射装置100は、パルス状の液体を脈動発生部110から噴射することによって、生体組織を切除又は切開することに使用する手術具としてのウォータージェットメスの一例である。
【0023】
脈動発生部110は、金属製の第2ケース113に、同じく金属製の第1ケース114を重ねた構造となっており、第2ケース113の前面には円管形状の流体噴射管112が立設され、流体噴射管112の先端にはノズル111が挿着されている。第2ケース113と第1ケース114との合わせ面には、薄い円板形状の流体室115が形成されており、流体室115は、流体噴射管112を介してノズル111に接続されている。また、第1ケース114の内部には、アクチュエーター116が設けられている。脈動発生部110と制御部130とは配線ケーブル150によって接続されており、制御部130内のアクチュエーター駆動回路200からは、配線ケーブル150を介して駆動信号がアクチュエーター116に供給される。また、配線ケーブル150はコネクターによって脈動発生部110に取り付けられている。このため、配線ケーブル150は、長さや特性の異なる種々の配線ケーブル150に取り替えることが可能となっている。
【0024】
流体供給手段120は、噴射しようとする液体(水、生理食塩水、薬液など)が収容された流体容器123から、第1接続チューブ121を介して液体を吸い上げた後、第2接続チューブ122を介して脈動発生部110の流体室115内に供給する。このため、流体室115は液体で満たされた状態となっている。
【0025】
そして、制御部130から駆動信号をアクチュエーター116に印加すると、駆動されたアクチュエーター116によって流体室115内に圧力変化が生じ、その結果、流体室115内に充満していた液体が、ノズル111からパルス状に噴射される。
【0026】
尚、液体噴射装置100のノズル111から液体を噴射する方式としては、静電方式、ピエゾ方式、膜沸騰方式などが挙げられる。静電方式は、アクチュエーターである静電ギャップに駆動信号を与えると、流体室115内に圧力変化を生じ、その圧力変化によってノズル111から液体が噴射されるというものである。ピエゾ方式は、アクチュエーターであるピエゾ素子に駆動信号を与えると、流体室115内に圧力変化を生じ、その圧力変化によってノズル111から液体が噴射されるというものである。膜沸騰方式は、第1ケース114の内部に微小ヒーターがあり、微小ヒーターによって瞬間的に加熱された液体が膜沸騰状態となって気泡が発生し、その圧力変化によってノズル111から液体が噴射されるというものである。膜沸騰方式の場合は、微小ヒーターに駆動信号を印加して流体室115内の圧力を制御するので、本実施例では膜沸騰方式に用いる微小ヒーターもアクチュエーターの一種として考える。尚、前述したピエゾ素子は容量成分を有する容量性負荷である。また前述した微小ヒーターは、一例として、抵抗成分を有する抵抗性負荷などが挙げられる。
【0027】
本発明は、何れの液体噴射方法も適用可能であるが、駆動信号の波高値や電圧増減傾きを調整することで、上述した生体組織の切除又は切開の程度等を制御可能なピエゾ素子に特に好適である。従って、以後は主に、アクチュエーター116にピエゾ素子を用いた場合を例に説明を行う。
【0028】
アクチュエーター116にピエゾ素子を用いた場合、アクチュエーター116の伸張量は、駆動信号として印加される電圧に依存する。従って、所望の特性の液体を噴射するためには、精度の良い駆動信号をアクチュエーター116に印加する必要がある。そこで、このような駆動信号を生成するために、制御部130内には、以下に説明するようなアクチュエーター駆動回路200が搭載されている。
【0029】
A−2.アクチュエーター駆動回路の回路構成:
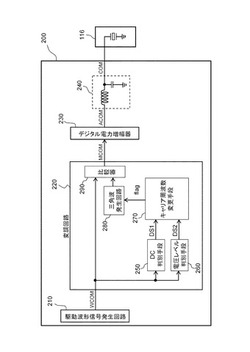
図2は、第1実施例の液体噴射装置100に搭載されたアクチュエーター駆動回路200の回路構成を示した説明図である。具体的には制御部130に搭載されたアクチュエーター駆動回路200の回路構成を示した説明図である。図示されているようにアクチュエーター駆動回路200は、駆動信号の基準となる駆動波形信号(以下、WCOM)を出力する駆動波形信号発生回路210と、駆動波形信号発生回路210から受け取ったWCOMをパルス変調して変調信号(以下、MCOM)に変換し、かつ後述するキャリア周波数設定信号(flag)によって、パルス変調する際のキャリア周波数を変更可能な変調回路220と、変調回路220からのMCOMをデジタル的に電力増幅して電力増幅変調信号(以下、ACOM)を生成するデジタル電力増幅器230と、デジタル電力増幅器230からACOMを受け取って変調成分を取り除いた後、駆動信号(以下、COM)として脈動発生部110のアクチュエーター116に供給する平滑フィルター240とを備えている。
【0030】
駆動波形信号発生回路210は、WCOMのデータを記憶した波形メモリーや、D/A変換器を備えており、波形メモリーから読み出したデータをD/A変換器でアナログ信号に変換することで、WCOMを生成する。また、変調回路220を、信号処理回路を用いてデジタル回路で構成することで、駆動波形信号発生回路210の波形メモリーから読み出したWCOMをデジタルデータのまま取り扱うようにしてもよい。
【0031】
変調回路220は、キャリア周波数fcの三角波を出力する三角波発生回路280と、駆動波形信号発生回路210から出力されたWCOMと三角波とを比較することによって、パルス波状の変調信号MCOMを生成(パルス変調)する比較器290を有している。三角波発生回路280は、WCOMがアナログ信号である場合は、オペアンプなどを用いた発振器で構成することができる。また三角波発生回路280は、WCOMがデジタル信号である場合は、マイコンやFPGAなどの制御器で構成することができる。
【0032】
また詳細は後述するが、第1実施例の変調回路220は、駆動波形信号発生回路210からのWCOMを基に、WCOMの一定電圧(直流)部分を判別して、DC判別信号(DS1)を出力するDC判別手段250と、駆動波形信号発生回路210からのWCOMを基に、WCOMの電圧値を判別して、電圧レベル判別信号(DS2)を出力する電圧レベル判別手段260と、DC判別信号と電圧レベル判別信号を基に、キャリア周波数を設定するキャリア周波数設定信号(flag)を三角波発生回路280に出力するキャリア周波数変更手段270を有している。ただし、電圧レベル判別手段260は、WCOMを基に、WCOMの電圧値に応じたパルス変調信号のデューティー比を判別して、前述したDS2を出力してもよい。以上のような構成により、第1実施例の変調回路220は、上述したキャリア周波数設定信号(flag)に基づいてキャリア周波数を変更することが可能となっている。
【0033】
尚、WCOMの電圧値とデューティー比Dとは一対一の関係にある。便宜上、以後パルス変調信号(MCOM)のデューティー比Dが1となる駆動波形信号(WCOM)の電圧値をVmaxとする。その場合、デューティー比Dに対応するWCOMの電圧値はD・Vmaxとなる。従って、前述したように、電圧レベル判別手段260は取得したWCOMの情報を基に、デューティー比の範囲を判別してDS2を出力してもよいし、WCOMの電圧値を判別してDS2を出力しても構わない。
【0034】
便宜上、以後の説明において、デューティー比D、又はWCOMの電圧値のどちらか一方の条件に注目して、課題の要因や解決策について説明する場合がある。ただし、これらは一対一の関係にある為、実際にはデューティー比D又はWCOMの電圧値のどちらの条件に注目した場合にも、同様の説明が成り立つ。従って、以後は特別に断ることなく、デューティー比D又はWCOMの電圧値のどちらか一方の条件に注目して説明を行う際には、もう一方の条件に注目しても同様の説明が成り立つことを前提に説明を行う。また駆動波形信号(WCOM)は駆動信号(COM)の基となる信号であるから、デューティー比DとCOMとも一対一の関係にある。後述するデジタル電力増幅器230の電源電圧をVddとした場合、デューティー比Dに対応するCOMの電圧値はD・Vddとなる。従って、以後は特別に断ることなく、デューティー比D又はWCOMの電圧値のどちらか一方の条件に注目して説明を行う際には、駆動信号(COM)の条件に注目しても同様の説明が成り立つことを前提に説明を行う。
【0035】
尚、本実施例では、DC判別手段250、電圧レベル判別手段260、およびキャリア周波数変更手段270は、変調回路220の内部に設ける構成としているが、変調回路220の外部に設ける構成としても構わない。その場合、変調回路220は、外部から来るキャリア周波数設定信号(flag)に基づいてキャリア周波数を変更することが可能となる。
【0036】
変調回路220によって得られたMCOMは、デジタル電力増幅器230に入力される。デジタル電力増幅器230は、プッシュ・プル接続された2つのスイッチ素子(MOSFETやIGBTなど)と、電源(出力電圧をVddとする)と、これらスイッチ素子を駆動するドライバーとを備えている。尚、MOSFETを駆動するドライバーはゲートドライバーと呼ぶ。MCOMの出力がハイの状態の場合は、ハイ側のスイッチ素子がONになり、ロー側のスイッチ素子がOFFになって、電源の電圧VddがACOMとして出力される。以後、この状態を「出力Hの状態」と称する。また、MCOMの出力がローの状態の場合は、ハイ側のスイッチ素子がOFFになり、ロー側のスイッチ素子がONになってグランドの電圧がACOMとして出力される。以後、この状態を「出力Lの状態」と称する。その結果、変調回路220の動作電圧とグランドとの間でパルス波状に変化するMCOMが、電源の電圧Vddとグランドとの間でパルス波状に変化するACOMに電力増幅される。この増幅では、プッシュ・プル接続された2つのスイッチ素子のON/OFFを切り換えているだけなので、アナログ波形を増幅する場合に比べれば、電力損失を抑制することが可能である。
【0037】
また、2つのスイッチ素子が共にONになると、電源Vddからグランドに向かって大きな突入電流が流れて素子に損傷を与える。そこで、こうしたことを回避するために、「出力Lの状態」と「出力Hの状態」との状態を切り換える際には、2つのスイッチ素子が何れもOFFとなる期間(デッドタイム期間)を経由して切り換えるようになっている。
【0038】
こうして電力増幅されたACOMは、LC回路によって構成される平滑フィルター240を通すことによってCOM(駆動信号)に変換され、アクチュエーター116に印加される。
【0039】
A−3.デジタル電力増幅器で電力損失が発生するメカニズム:
上述したように、デジタル電力増幅器230は、大きな電力損失を伴うことなくMCOMを電力増幅することが可能である。しかしある条件が成立すると、電力増幅時にデジタル電力増幅器230で大きな電力損失が発生することがある。
【0040】
図3は、一定電圧のCOMを連続的に出力する場合に、デジタル電力増幅器230における電力損失が、デューティー比に応じて増加する様子を示した説明図である。具体的にはデジタル電力増幅器230で電力損失が発生する様子を示した説明図である。図3に示すように、アクチュエーターに対して一定電圧のCOMを連続的に出力する状態において、変調信号のデューティー比がある値Xaより低くなるか、又はある値Xbより高くなると、電力損失が急激に増加する。ただし、Xa<Xbとする。尚、前述したように、WCOMの電圧値とデューティー比Dとは一対一の関係にある為、上述した条件は以下のように言い換えることができる。すなわち、アクチュエーターに対して一定電圧のCOMを連続的に出力する状態において、WCOMの電圧値がある値Xa・Vmaxより低くなるか、又はある値Xb・Vmaxより高くなると、電力損失が急激に増加する。また、前述したように、COMの電圧値とデューティー比Dとは一対一の関係にある為、上述した条件は以下のように言い換えることができる。すなわち、アクチュエーターに対して一定電圧のCOMを連続的に出力する状態において、COMの電圧値がある値Xa・Vddより低くなるか、又はある値Xb・Vddより高くなると、電力損失が急激に増加する。このような現象が生じると、WCOMをMCOMにパルス変調してから増幅したことによる省電力効果が非常に低くなるので、対策が必要となる。そのために、このような現象が生じるメカニズムを明らかにしなければならない。尚、上述したXa・Vmaxは本発明における「第一の電圧値」に相当し、また上述したXb・Vmaxは本発明における「第二の電圧値」に相当する。
【0041】
図3に示すように、本実施例では便宜上、デューティー比がYa〜Ybの範囲で、すなわち電圧値がYa・Vmax〜Yb・Vmaxの範囲で前記駆動波形信号(WCOM)を出力するものとする。ただし0<Ya<Yb<1とする。
【0042】
図4は、デジタル電力増幅器230の詳細な構成を示した回路図である。具体的には前述したデジタル電力増幅器230の内部構成を示した回路図である。図4では、スイッチ素子にMOSFETを用いた場合の回路図を示している。図4に示すように、MOSFETにはCds(ドレイン端子とソース端子との間に生じた寄生容量)、Cgd(ゲート端子とドレイン端子との間に生じた寄生容量)、およびCgs(ゲート端子とソース端子との間の寄生容量)の三つの寄生容量が存在する。尚、以後、ハイ側のMOSFETを「MOS(H)」と称し、ロー側のMOSFETを「MOS(L)」と称する。また、デジタル電力増幅器230のACOMが出力される端子を「Vs」と称する。本願の発明者らは、アクチュエーターに対して一定電圧を連続的に出力する場合には、これらの寄生容量が原因で前述した電力損失の増加が発生していることを見いだした。
【0043】
便宜上、以後はCdsに充放電される電荷を例に、上述した電力損失が発生する要因について説明を行う。ただし、CgdおよびCgsに関しても、後述するCdsの充放電の説明と同様のことが言える。以後、本実施例ではCdsのことを単に「寄生容量」と称するものとする。また、本実施例では、デジタル電力増幅器230のスイッチ素子にMOSFETを用いた場合を例に説明を行うが、スイッチ素子にIGBTなどを用いた場合や、スイッチ素子に並列に還流ダイオードを取り付けた場合なども、同様の説明が成り立つ。
【0044】
図5は、一定電圧のCOMを出力した場合に、平滑フィルター240のコイルに流れる電流がほぼ直線的に変化する様子を示した説明図である。
上述した寄生容量による電力損失発生のメカニズムを明らかにする為に、図5(a)に示す平滑フィルター240のコイルに流れる電流i(t)について説明する。図5(b)に、パルス状のACOMを平滑フィルター240に入力した場合の電流i(t)の様子を示す。便宜上、i(t)の方向を、Vs端子側から平滑フィルター240のコンデンサー側に流れる向きをプラスとし、また平滑フィルター240のコンデンサー側からVs端子側に流れる向きをマイナスとして定義する。また、図5(b)に示すように、電流i(t)のプラス側の振幅値をI1、マイナス側の振幅値をI2と表記する。ここで、ACOMのパルス変調周期はT[s](=1/fc)で、ACOMの電圧がVddに保たれるパルスのオン期間をton[s]、ACOMの電圧がグランドに保たれるパルスのオフ期間をtoff[s]とする。またここでは、ACOMのパルスのデューティー比D=ton/T(パーセント表示の場合は100×ton/T)が一定である場合、すなわち平滑フィルター240の出力電圧Vout(=D×Vdd)が一定である場合について説明を行う。以下に、i(t)の式の導出を行う。
【0045】
前述したように、本実施例ではアクチュエーター116にピエゾ素子を用いた場合を例に説明を行う。尚、ピエゾ素子は容量性の負荷である。図5(a)に示すように、容量性負荷であるアクチュエーター116は、平滑フィルター240のコンデンサーCに対して並列に接続されている。よって、平滑フィルター240のコンデンサーとアクチュエーター116とを合成容量として考え、電流i(t)の式を導出する。また便宜上、ここでは上記合成容量を単純に平滑フィルター240のコンデンサーと称する。
【0046】
図6は、一定電圧のCOMを出力した場合に、平滑フィルター240のコイルに流れる電流がほぼ直線的に変化する理由を示した説明図である。具体的には平滑フィルター240のコイルに流れる電流i(t)の算出式を示す。図6(a)はton期間について示したものであり、図6(b)はtoff期間について示したものである。図6(a)において、平滑フィルター240を構成するコイルのインダクタンスをL、コンデンサーのキャパシタンスをC、コイルに流れる初期電流(電圧Vdd印加時に流れていた電流)をI0、コンデンサーの初期電圧(電圧Vddの印加時でのコンデンサーの端子間電圧)をE0とすると、(1)式の微分方程式が成立する。(1)式を解くと、ton期間の電流i(t)は(2)式のように求められる。ここで、ω0は平滑フィルター240の共振周波数(=1/√(LC))である。また時間tonと共振周波数ω0との積がゼロ近傍の場合は、cosω0tはほぼ1、sinω0tはほぼω0tとみなすことができる。すると、(2)式は(3)式で近似することができる。(3)式より、図5(b)に示したように、ton期間の電流i(t)は時間tの経過とともに直線的に増加することが分かる。
【0047】
また、図6(b)においては(4)式の微分方程式が成立する。(4)式を解くと、toff期間の電流i(t)は(5)式のように求められる。上述したように、sinω0tをω0tとみなして、cosω0tを1とみなすと、(5)式は(6)式で近似することができる。(6)式より、図5(b)に示したように、toff期間の電流i(t)は時間tの経過とともに直線的に減少することが分かる。
【0048】
ここで、アクチュエーター116がピエゾ素子(容量性負荷)の場合は、平滑フィルター240の出力電圧Vout(=D×E)が一定の状態であれば、一変調周期Tの間でコンデンサーに出入りする電荷量は等しい値となる。これは、i(t)がプラス側とマイナス側との双方向に流れる波形であり、またそれぞれの方向におけるi(t)の振幅値I1およびI2が等しいことを示している。従って図5(b)に示したように、i(t)の振幅値の大きさを|IA|(=|I1|=|I2|)とすると、i(t)はton期間ではマイナスIAからほぼ直線的に増加してプラスIAに転じる。また、toff期間ではプラスIAからほぼ直線的に減少してマイナスIAに転じる。次に、|IA|の式の導出を行う。
【0049】
図5に示したように、電圧Vddを印加した瞬間(t=0)では、電流I=−IAであるから、(3)式においてI0=−IAとなる。また初期電圧E0は、図5の電圧Vout(=D×Vdd)に等しい。更に、時間t=tonにおいては、(3)式においてI(ton)=IAとなる。これらを(3)式に代入して整理すると、コイルに流れる電流の振幅|IA|は、図7(a)に示した(7)式によって示される。
図7は、一定電圧のCOMを出力した場合に、平滑フィルター240のコイルに流れる電流の振幅が、デューティー比に応じて変化する様子を示した説明図である。ただし、図5で示した周期Tの逆数fc(キャリア周波数)とし、(3)式のtにton=D/fcを代入している。
【0050】
(7)式から、図7(b)に示すように、|IA|はデューティー比Dが0.5の時に最大値となり、Dが0.5から小さくなるにつれて、あるいは0.5から大きくなるにつれて小さくなるカーブ特性を持つ。アクチュエーターに対して一定電圧を連続的に出力する場合、このデューティー比に対する|IA|のカーブ特性が、上述した寄生容量によって電力損失が発生する要因に繋がっていることが見いだされた。より詳細には、|IA|が後述する閾値電流Ithを下回るようなデューティー比Dとなった場合に、上述した課題が発生することが見いだされた。以後、そのメカニズムについて説明する。尚、コイル電流の振幅|I1|および|I2|(容量性負荷の場合は|IA|)がIthと等しくなるデューティー比をXaおよびXbとする。ただし、Xa<Xbであるとする。また、前述したように、デューティー比XaおよびXbに対応するWCOMの電圧値は、それぞれXa・Vmax、Xb・Vmaxである。
【0051】
図8は、デジタル電力増幅器230の動作が切り換わる際のACOMの様子を示した説明図である。具体的にはデジタル電力増幅器230が「出力Lの状態」から「出力Hの状態」に切り換わる際と、「出力Hの状態」から「出力Lの状態」に切り換わる際のVs端子の電圧波形(ACOM)の様子を示す。ただし、図8(a)は、|IA|が後述するIthよりも大きく、前述した寄生容量による電力損失が発生しない場合の様子を示している。また図8(b)は、|IA|が後述するIthよりも小さく、前述した寄生容量による電力損失が発生する場合の様子を示している。
【0052】
先ず始めに、図8(a)の場合について説明する。
図9は、一定電圧のCOMを出力した場合に、平滑フィルター240のコイルに大きな電流が流れる条件では、電力増幅時の電力損失が低下する理由を示した説明図である。具体的には図8(a)の状態[A]から状態[C]のそれぞれの場合において、MOSFETに流れる電流の様子を示す。図9(a)に示すように、「出力Lの状態」で、かつ図中の破線の矢印で示されるようなマイナス側のコイル電流i(t)が流れている状態を、状態[A]と呼ぶ。状態[A]ではMOS(H)のドレイン端子が電圧Vddに接続され、MOS(H)のソース端子はグランドに接続されているので、MOS(H)の寄生容量には電荷が蓄えられている。またMOS(L)のドレイン端子およびソース端子は何れもグランドに接続されているので、MOS(L)の寄生容量には電荷が蓄積されていない。
【0053】
図9(b)に示すように、状態[A]からデッドタイム期間に移行すると、自己誘導現象によって、図9(a)で示したコイル電流をそのまま流し続けようとする方向に起電力(逆起電力)が発生する。この状態を状態[B]と呼ぶ。図9(b)に示した破線の矢印は、前述した逆起電力によって流れる電流を表している。状態[B]では二つのMOSFETが何れもOFFの状態である。従って、前述した逆起電力による電流は、図9(b)に示したスイッチ部には流れない。一方、前述した逆起電力によって、MOS(L)の寄生容量にはドレイン端子側からソース端子側に電流が流れるので、MOS(L)の寄生容量が充電される。また、前述した逆起電力によって、MOS(H)の寄生容量にもソース端子側からドレイン端子側に電流が流れ、MOS(H)の寄生容量に蓄えられていた電荷が電源Vddに回生される。その結果、状態[B]の間は、Vsの電圧がグランドからVddに向かって上昇していく。
【0054】
ここで、|I2|(=|IA|)が大きい程、前述した逆起電力は大きくなり、状態[B]のデッドタイム期間中にVsの電圧が上昇する速度、すなわち電圧の傾きが大きくなる。図8(a)に示したように、状態[B]のデッドタイム期間の終了時に、Vsの電圧が調度Vddまで達する場合のコイル電流の振幅値(|I2|)を、閾値電流Ithと称する。前述したように、ここでは|I2|(=|IA|)がIthよりも大きい場合について説明している。この場合は、図8(a)に示したように、デッドタイム期間の終了時に、前述した逆起電力によってVsの電圧がVddまで達する。この場合、デッドタイム期間内にMOS(H)の寄生容量に蓄えられていた電荷は全て回生され、またMOS(L)の寄生容量への充電が完了する。
【0055】
デッドタイム期間の終了後に、「出力Hの状態」で、かつマイナス側のコイル電流i(t)が流れている状態を、状態[C]と呼ぶ。図9(c)に示すように、MOS(H)の寄生容量に蓄えられていた電荷が全て回生され、またMOS(L)の寄生容量への充電が完了した状態でMOS(H)がON状態になり、状態[C]に移行する。このような場合は、MOS(H)がON状態になっても、寄生容量に対して電荷の充放電は起こらない。よって、MOS(H)のオン抵抗には寄生容量が要因となる電流は流れないので、「出力Lの状態」から「出力Hの状態」に切り換える際に、MOSFETの寄生容量による損失は起こらない。
【0056】
図10は、一定電圧のCOMを出力した場合に、平滑フィルター240のコイルに大きな電流が流れる条件では、電力増幅時の電力損失が低下する理由を示した説明図である。具体的には図8(a)の状態[D]から状態[F]のそれぞれの場合において、MOSFETに流れる電流の様子を示す。図8(a)に示したように、状態[C]から時間が経つと、「出力Hの状態」で、かつ図10(a)中の破線の矢印で示されるようなプラス方向の電流が流れるようになる。この状態を、状態[D]と呼ぶ。図10(a)に示すように、状態[D]ではMOS(L)のドレイン端子が電圧Vddに接続され、MOS(L)のソース端子はグランドに接続されているので、MOS(L)の寄生容量には電荷が蓄えられている。またMOS(H)のドレイン端子およびソース端子は何れも電源Vddに接続されているので、MOS(H)の寄生容量には電荷が蓄積されていない。
【0057】
図10(b)に示すように、状態[D]からデッドタイム期間に移行すると、前述した自己誘導現象によって、図10(a)で示したコイル電流をそのまま流し続けようとする方向に起電力(逆起電力)が発生する。この状態を状態[E]と呼ぶ。図10(b)に示した破線の矢印は、前述した逆起電力によって流れる電流を表している。状態[E]では、前述した逆起電力によって、MOS(H)の寄生容量にはドレイン端子側からソース端子側に電流が流れるので、MOS(H)の寄生容量が充電される。また、MOS(L)の寄生容量にもソース端子側からドレイン端子側に電流が流れるので、MOS(L)の寄生容量に蓄えられていた電荷が、平滑フィルター240のコンデンサー側に移動し、平滑フィルター240のコンデンサーを充電する。その結果、状態[E]の間は、Vsの電圧がVddからグランドに向かって下降していく。
【0058】
ここで、|I1|(=|IA|)が大きい程、前述した逆起電力は大きくなり、状態[E]のデッドタイム期間中にVsの電圧が下降する速度、すなわち電圧の(負の)傾きが大きくなる。図8(a)に示したように、状態[E]のデッドタイム期間の終了時に、Vsの電圧が調度グランドまで達する場合のコイル電流の振幅値(|I1|)は、前述した閾値電流Ithとなる。前述したように、ここでは|I1|(=|IA|)がIthよりも大きい場合について説明している。この場合は、図8(a)に示したように、デッドタイム期間の終了時に、前述した逆起電力によってVsの電圧がグランドまで達する。この場合、デッドタイム期間内にMOS(L)の寄生容量に蓄えられていた電荷は全て平滑フィルター240のコンデンサー側に移動し、またMOS(H)の寄生容量への充電が完了する。
【0059】
デッドタイム期間の終了後に、「出力Lの状態」で、かつプラス側のコイル電流i(t)が流れている状態を、状態[F]と呼ぶ。図10(c)に示すように、MOS(L)の寄生容量に蓄えられていた電荷が全て平滑フィルター240のコンデンサー側に移動し、またMOS(H)の寄生容量への充電が完了した状態でMOS(L)がON状態になり、状態[F]に移行する。このような場合は、MOS(L)がON状態になっても、寄生容量に対して電荷の充放電は起こらない。よって、MOS(L)のオン抵抗には寄生容量が要因となる電流は流れないので、「出力Hの状態」から「出力Lの状態」に切り換える際に、MOSFETの寄生容量による損失は起こらない。尚、状態[F]の次は、前述した状態[A]に戻ることになる。
【0060】
以上が、|IA|(=|I1|=|I2|)がIthよりも大きく、前述した寄生容量による電力損失が発生しない図8(a)の場合についての説明である。次に、前述した寄生容量による電力損失が発生する図8(b)の場合について、図8(a)の場合との相違点を中心に説明する。
【0061】
前述したように、図8(b)では|I2|(=|IA|)がIthよりも小さい場合について説明している。この場合は、「出力Lの状態」から「出力Hの状態」に移行する際のデッドタイム期間内(図8(b)の状態[B])に、Vsの電圧がVddまで達しない。すると、前述したMOS(H)の寄生容量に蓄えられていた電荷の回生と、MOS(L)の寄生容量への充電は、デッドタイム期間内に完了しない。そのような状態でMOS(H)がON状態となると、状態[B]から、図8(a)の場合にはなかった状態[I]に移行する。
【0062】
図11は、デジタル電力増幅器230での電力増幅時に電力損失が発生する理由を示した説明図である。図11(a)に、図8(b)の状態[I]においてMOSFETに流れる電流の様子を示す。状態[I]では、MOS(H)がONの状態となる為、MOS(H)のドレイン端子とソース端子とは短絡状態となる。その結果、MOS(H)の寄生容量において、回生されずに残っていた電荷が、図11(a)の一点鎖線の矢印で示す電流として、MOS(H)のスイッチ部を介して流れる。またMOS(L)のドレイン端子は電圧Vddになり、ソース端子はグランドの電位に保たれている。その結果、図11(a)の二点鎖線の矢印で示す電流がMOS(H)のスイッチ部を介して流れ、MOS(L)の寄生容量が充電される。よって、MOS(H)のオン抵抗に上述した一点鎖線と二点鎖線との電流が流れる為に、状態[I]ではMOS(H)において損失が発生する。
【0063】
次に、「出力Hの状態」から「出力Lの状態」に移行する際のデッドタイム期間内(図8(b)の状態[E])について説明する。前述したように、図8(b)では|I1|(=|IA|)がIthよりも小さい場合について説明している。この場合は、状態[E]のデッドタイム期間内に、Vsの電圧がグランドまで達しない。すると、前述したMOS(L)の寄生容量に蓄えられていた電荷の平滑フィルター240のコンデンサー側への移動と、MOS(H)の寄生容量への充電は、デッドタイム期間内に完了しない。そのような状態でMOS(L)がON状態となると、状態[E]から、図8(a)にはなかった状態[J]に移行する。
【0064】
図11(b)に、図8(b)の状態[J]においてMOSFETに流れる電流の様子を示す。状態[J]では、MOS(L)がON状態となる為、MOS(L)のドレイン端子とソース端子とは短絡状態となる。その結果、MOS(L)の寄生容量において、平滑フィルター240のコンデンサー側へ移動されずに残っていた電荷が、図11(b)の一点鎖線の矢印で示す電流として、MOS(L)のスイッチ部を介して流れる。またMOS(H)のドレイン端子は電圧Vddになり、ソース端子はグランドの電位となる。その結果、図11(b)の二点鎖線の矢印で示す電流がMOS(L)のスイッチ部を介して流れ、MOS(H)の寄生容量が充電される。よって、MOS(L)のオン抵抗に上述した一点鎖線と二点鎖線との電流が流れる為に、状態[J]ではMOS(L)において損失が発生する。
【0065】
図7に示したように、アクチュエーターに対して一定電圧を連続的に出力する場合は、デューティー比が0.5より小さくなるにつれて、あるいは0.5より大きくなるにつれて、コイルの電流の振幅|IA|(=|I1|=|I2|)は小さくなる。よって、デューティー比が0.5より小さくなる程、又は大きくなる程、|IA|が閾値電流Ithを下回るような条件となり得る。その結果、上述した状態[I]や状態[J]が発生し、前述した寄生容量による損失が発生してしまう。また、アクチュエーターに対して一定電圧を連続的に出力する状態にある為、上述した状態[I]および状態[J]が、パルス変調のキャリア周波数fcに対応する高い頻度で発生する為に、非常に大きな電力損失が発生することになる。以上のことより、このような寄生容量による電力損失を回避するためには、状態[I]および状態[J]が発生しないようにすればよい。
【0066】
A−4.デジタル電力増幅器での電力損失を回避するメカニズム:
前述したように、状態[I]を発生させない為には、状態[B]におけるデッドタイム期間内に、Vsの電圧が電圧Vdd以上に上昇すればよい。すなわち、コイル電流の振幅の大きさ|I2|(容量性負荷の場合は|I2|=|IA|)が、前述したIth以上になるようにすればよい。
【0067】
また前述したように、状態[J]を発生させない為には、状態[E]におけるデッドタイム期間内に、Vsの電圧がグランド以下に下降すればよい。すなわち、コイル電流の振幅の大きさ|I1|(容量性負荷の場合は|I1|=|IA|)が、前述したIth以上になるようにすればよい。
【0068】
ここで、上述した状態[I]や状態[J]が発生しないように、|I1|(=|IA|)≧Ithおよび、|I2||(=|IA|)≧Ithの条件を満たす方法として、寄生容量の容量値、デッドタイム期間の長さ、平滑フィルター240のコイルのインダクタンス値、キャリア周波数のいずれかの値を変更することが挙げられる。上述したパラメーターの中では、キャリア周波数を変更することが比較的容易である。アクチュエーターに対して一定電圧を連続的に出力する状態で、デューティー比DがD<Xa又はD>Xbとなる場合には、(7)式に示す関係から、キャリア周波数を下げることで、|I1|(=|IA|)≧Ithおよび、|I2||(=|IA|)≧Ithの条件を満たすことが可能となる。前述したように、デューティー比DがD<Xa又はD>Xbとなる条件は、WCOMの電圧値Vに注目した場合には、VがV<Xa・Vmax又はV>Xb・Vmaxとなる条件として言い換えることが出来る。
【0069】
以上のことから、上述した状態[I]や状態[J]が発生しないように、すなわち|I1|(=|IA|)≧Ithおよび、|I2||(=|IA|)≧Ithの条件を満たすようにキャリア周波数fcを変更してやれば、アクチュエーターに対して一定電圧を連続的に出力する状態で、かつどのような駆動波形信号の電圧値(又はデューティー比、又は駆動信号の電圧値)の条件である場合にも、前述したデジタル電力増幅器230における電力損失の増加を回避することが可能となる。第1実施例の液体噴射装置100は、このような原理に基づいて、デジタル電力増幅器230での電力損失が増加しないように、パルス変調時のキャリア周波数fcを変更している。以下、第1実施例の液体噴射装置100で、アクチュエーター116に対して一定電圧を連続的に出力する状態で、駆動波形信号の電圧値VがV<Xa・Vmax又はV>Xb・Vmaxとなる場合(デューティー比DがD<Xa又はD>Xbとなる場合)に、電力損失の増加を回避する方法について具体的に説明する。
【0070】
以上では、アクチュエーターに対して一定電圧、すなわち傾きが0のCOMを連続的に出力する状態に関して説明を行ってきた。しかし、アクチュエーターに対して出力するCOMが完全な一定電圧でない場合、すなわち傾きが小さい場合でも、キャリア周波数を変更することで、前述した電力損失の増加を回避することが可能である。そこで、ここでは本発明における「一定電圧」に関する定義を行う。
【0071】
前述したように、アクチュエーターに対して一定電圧を連続的に出力した場合、平滑フィルター240のコイルに流れる電流i(t)は、以下のような特性を持つ。すなわち電流i(t)は、変調信号(MCOM)の一変調周期内で、プラスとマイナスとの双方向に流れる特性を持つ。電流i(t)がこのように流れる条件下にある場合は、キャリア周波数を下げることで、電流i(t)のプラス側の振幅の大きさ|I1|と、マイナス側の振幅値の大きさ|I2|の双方を大きくすることが出来る。従って|I1|および|I2|が前述したIthより小さい場合にも、キャリア周波数を下げることで、|I1|および|I2|の双方をIth以上とすることができ、前述した状態[I]および状態[J]の発生、すなわち前述したデジタル電力増幅器230における電力損失の増加を回避することができる。
【0072】
図12は、COMの電圧傾きが小さい場合の、平滑フィルター240のコイルに流れる電流波形の例を示した説明図である。具体的にはCOMの電圧傾きが小さい場合のコイル電流i(t)の波形例を示す。ピエゾ素子のような容量性負荷をアクチュエーター116に用いた場合、アクチュエーター116には、印加されるCOMに対して半周期だけ位相が進んだ電流Iが流れる。従って、図12に示すように、ピエゾ素子であるアクチュエーター116に対して傾きを持った電圧のCOMを駆動する場合、コイル電流i(t)は前述した電流Iに、変調回路220での変調周期に対応する三角波状の電流(図5(b)および、図6の(3)式、(6)式を参照)が重畳した波形となる。またアクチュエーター116に印加されるCOMの電圧傾きが大きいほど、前述した電流Iは大きくなる。
【0073】
図12に示すように、COMの電圧傾きが小さく、電流i(t)が一変調周期内で、プラスとマイナスとの双方向に流れる場合を考える。この場合は、前述した理由から、キャリア周波数を下げることで前述した状態[I]および状態[J]の発生、すなわち前述したデジタル電力増幅器230における電力損失の増加を回避することができる。以上のことより、本発明において、アクチュエーターに対して出力する「一定電圧」のCOMとは、以下の条件を満たすような「緩やかな傾きの電圧」のCOMまでを含むものとする。すなわち電流i(t)が、変調信号(MCOM)の一変調周期内で、プラスとマイナスとの双方向に流れていることを条件とする。
【0074】
尚、以上ではアクチュエーター116にピエゾ素子(容量性負荷)を用いた場合を例に説明を行ってきたが、前述したように、アクチュエーター116に微小ヒーターなどの抵抗性負荷を用いた場合にも、キャリア周波数を変更することで、前述したデジタル電力増幅器230における電力損失の増加を回避することができる。以下にその説明を行う。
図13は、抵抗性負荷のアクチュエーター116に一定電圧のCOMを連続的に出力した場合の、平滑フィルター240のコイルに流れる電流の様子を示した説明図である。具体的には抵抗性負荷のアクチュエーター116に一定電圧を連続的に出力した場合の、コイルに流れる電流i(t)’の波形例を示す。
【0075】
抵抗値Rの抵抗性負荷であるアクチュエーター116に一定電圧Eを連続的に出力した場合、アクチュエーター116には一定電流Ir=E/Rが流れる。従って図13に示すように、前述したコイルの電流i(t)’は、容量性負荷のアクチュエーター116の場合に説明したコイルの電流i(t)と、前述した一定電流Irとの和で表される。従って、電流i(t)’のプラス側の振幅値|I1|とマイナス側の振幅値|I2|とは、ピエゾ素子のような容量性負荷のアクチュエーター116に一定電圧を連続的に出力した場合と異なり、|I1|=|I2|(=|IA|)とならない。その点に注意した上で、上述した容量性負荷のアクチュエーター116の説明の場合と同様に、前述した電流i(t)’の振幅値|I1|と|I2|とが、それぞれ前述した閾値電流Ith以上となるようにキャリア周波数を変更する。以上のようにすることで、微小ヒーターなどの抵抗性負荷のアクチュエーター116に一定電圧を連続的に出力する状態で、駆動波形信号の電圧値(又はデューティー比、又は駆動信号の電圧値)がどのような条件にある場合にも、前述した電力損失の増加を回避することが可能となる。
【0076】
A−5.第1実施例での電力損失の増加の回避方法:
図14は、第1実施例の液体噴射装置100の構成の一部を示した説明図である。具体的には第1実施例の液体噴射装置100の構成の一部と、デジタル電力増幅器230での電力損失の増加を回避する方法の説明図を示す。図14(a)に示すように、第1実施例の駆動波形信号発生回路210は、WCOMのデジタルデータを記憶した波形メモリーと、波形メモリーに記憶されたWCOMのデータを読み出す駆動波形信号制御手段を有している。変調回路220にWCOMをデジタルデータとして入力する場合、駆動波形信号制御手段は、波形メモリーから読み出したWCOMのデジタルデータをそのまま出力する。また前述したように、変調回路220にWCOMをアナログデータとして入力する場合は、駆動波形信号制御手段にD/A変換器を備えておけばよい。本実施例では、駆動波形信号制御手段はWCOMをデジタルデータのまま出力するものとする。
【0077】
図14(a)に示すように、波形メモリーには、WCOMの出力を開始してからの経過時間tnと、そのときに出力するWCOMの電圧Vnとが記憶されている。尚、tnは経過時間ではなく、一つ前の時間tn−1からの差分データとして波形メモリーに登録してもよい。その場合は、tnを経過時間として登録する場合に比べて、波形メモリーの使用容量を低減できる可能性がある。同様に、WCOMの電圧Vnに関しても、一つ前の電圧Vn−1からの差分データとして波形メモリーに登録すれば、波形メモリーの使用容量を低減できる可能性がある。また駆動波形信号制御手段が、波形メモリーから一定の時間間隔Δt(サンプリング時間)で電圧データを読み出す場合には、前述した経過時間のデータは波形メモリーに記憶させる必要はない。
【0078】
前述したように、変調回路220は、キャリア周波数設定信号(flag)を三角波発生回路280に出力することで、flagに基づいてキャリア周波数を変更することが可能となっている。ここではflagを2ビットの信号とし、以下の3つのキャリア周波数に変更可能であるとする。1つ目は、WCOMの電圧VがXa・Vmax≦V≦Xb・Vmax(デューティー比DがXa≦D≦Xb)である場合に選択される基準キャリア周波数fc0とする。fc0は、アプリケーションに要求される種々の仕様から決定されるものである。2つ目は、アクチュエーターに対して一定電圧を連続的に出力している状態で、WCOMの電圧VがYa・Vmax≦V<Xa・Vmax(デューティー比DがYa≦D<Xa)の領域になる場合において、図8(b)に示した状態[I]および状態[J]の発生を回避可能な第一キャリア周波数fc1とする。ただし前述したように、fc1<fc0である。3つ目は、アクチュエーターに対して一定電圧を連続的に出力している状態で、WCOMの電圧VがXb・Vmax<V≦Yb・Vmax(デューティー比DがXb<D≦Yb)の領域になる場合において、図8(b)に示した状態[I]および状態[J]の発生を回避可能な第二キャリア周波数fc2とする。ただし前述したように、fc2<fc0である。
【0079】
図14(b)に示すように、flag=「00」を出力すると基準キャリア周波数fc0が選択され、flag=「01」を出力すると第一キャリア周波数fc1が選択され、またflag=「10」を出力すると第二キャリア周波数fc2が選択されるものとする。尚、変更可能なキャリア周波数の種類を増やす場合は、flagのビット数を増やすことで対応可能である。
【0080】
尚、以後は前述したfc0、fc1、fc2の3種類のキャリア周波数に変更可能な場合を例に説明を行うが、以下のようにすることで、fc1とfc2とは同じ周波数としても構わない。すなわち、アクチュエーターに対して一定電圧を連続的に出力している状態で、WCOMの電圧VがYa・Vmax≦V<Xa・Vmax又はXb・Vmax<V≦Yb・Vmax(デューティー比Dの場合はYa≦D<Xa又はXb<D≦Yb)のどちらの領域にある場合においても、図8(b)の状態[I]および状態[J]の発生を回避可能なキャリア周波数をfc1’とすれば、前述したfc1およびfc2は同じ周波数fc1’としても構わない。この場合は、flagを1ビットの信号とし、前述したfc0とfc1’との2種類のキャリア周波数に変更可能な構成とすればよい。
【0081】
また、ここではWCOMの電圧VがYa・Vmax≦V≦Yb・Vmaxの範囲で出力される液体噴射装置100の場合を例に説明を行っているが、以下のような場合も考えられる。例えば、WCOMの電圧VがYa・Vmax≦V≦Xb・Vmaxの範囲(Dの場合はYa≦D≦Xb)で出力されるような液体噴射装置100である場合や、種々の回路条件および負荷であるアクチュエーター116の電気的な特性などが要因で、V<Xa・Vmaxの範囲でのみ前述した電力損失の増加が発生するような場合が考えられる。この場合には、前述したfc0とfc1との2種類に変更可能な構成とし、アクチュエーターに対して一定電圧を連続的に出力している状態で、WCOMの電圧値VがV<Xa・Vmaxとなる場合のみ、キャリア周波数をfc1に変更するようにしてもよい。
【0082】
また、別の例として、WCOMの電圧値VがXa・Vmax≦V≦Yb・Vmaxの範囲(Dの場合はXa≦D≦Yb)で出力されるような液体噴射装置100である場合や、種々の回路条件および負荷であるアクチュエーター116の電気的な特性などが要因で、V>Xb・Vmaxの範囲でのみ前述した電力損失の増加が発生するような場合が考えられる。この場合には、前述したfc0とfc2との2種類に変更可能な構成とし、アクチュエーターに対して一定電圧を連続的に出力している状態で、WCOMの電圧値VがV>Xb・Vmaxとなる場合のみ、キャリア周波数をfc2に変更するようにしてもよい。
【0083】
図15は、第1実施例の液体噴射装置100のデジタル電力増幅器230において、電力損失の増加を回避可能な理由を示した説明図である。ただし、アクチュエーターに対して一定電圧を連続的に出力している場合の説明図である。図15(a)に示すように、WCOMの電圧値VがV<Xa・Vmaxの領域になる場合には、キャリア周波数をfc0からfc1に変更する。またVがV>Xb・Vmaxの領域になる場合には、キャリア周波数をfc0からfc2に変更する。その結果、図15(b)中に太い破線で示したように、WCOMの電圧値(又はデューティー比D、又はCOMの電圧値)がどのような条件にある場合にも、前述したデジタル電力増幅器230における電力損失を回避することが可能となる。
【0084】
次に、第1実施例の液体噴射装置100の変調回路220における、キャリア周波数の変更を判断および制御するDC判別手段250、電圧レベル判別手段260、キャリア周波数変更手段270について詳細に説明を行う。
【0085】
まず図16を用いて、DC判別手段250の説明を行う。
図16は、第1実施例で駆動波形信号(WCOM)にフラグが設定された態様を示した説明図である。図16中では、デジタルデータであるWCOMを白丸のプロットで表している。また、そのデジタルデータは時間間隔がΔtで出力されるものとする。図16では見易さの為、図中の白丸で示したデジタルデータのプロットを、実線で繋いで表示している。ここで、駆動波形信号(WCOM)は駆動信号(COM)の基となる信号であるから、アクチュエーター116に対して一定電圧のCOMを出力しているかを判別する場合、基となるWCOMの電圧波形の情報を得ることで判別することが可能である。以下は、DC判別手段250は、WCOMの情報を基にアクチュエーター116に対して一定電圧のCOMを出力しているかを判別する場合の例を示すが、COMの情報を基に判別する方法でも構わない。図16中に示した期間1および期間2のように、DC判別手段250は、WCOMが一定値(WCOMの傾きが0)の期間はDC判別信号(DS1)を「1」として出力し、またそれ以外の期間はDS1を「0」として出力する。
【0086】
図17は、DC判別信号設定処理を示した説明図である。具体的にはDC判別手段250がWCOMを基にDC判別信号(DS1)を設定するDC判別信号設定処理の一例を示す。ここで、図16で示したWCOMのデータにおいて、時間tnにおける電圧データをVnとする。また、ここではWCOMのデータがn=0からn=mまで用意されており、時間tmに到達すると、WCOMの1波形が終了となる。図17では、まずDC判別信号(DS1)の初期値として、DS1=0を設定する。その後、WCOMの電圧データの初期値として、n=−1の場合に相当する電圧データをV−1=0として設定しておく。
次に、DC判別手段250にWCOMの次のデータV0が転送されてくる。そして、V0と初期値V−1とのデータが等しいかを判別した後、等しい場合はV0のデータに対してDS=1を設定し、異なる場合はDS=0を設定する。その後、時間t0における電圧データV0を記憶する。そして、現在のデータがWCOMの波形終了点(n=m)かを判別し、n=mでなければ、WCOMの次の電圧データであるV1が転送されてくる。以後は、n=mとなるまで、上述したフローを繰り返す。また、n=mとなると、WCOMが連続出力される設定になっているかを判別する。連続出力の設定になっている場合は、再び図17に示すS101のステップに戻り、WCOMの最初のデータ(n=0)から上述したフローを繰り返す。連続出力の設定になっていない場合は、図17のフローを終了する。
【0087】
以上のようなフローにより、WCOMの1波形に渡ってDC判別信号(DS1)を設定することが可能となる。尚、図17のフローでは、WCOMのデータが連続で2点以上同じ電圧値であった場合には、DS=1となるように設定していた。ただし、図17のフローはDC判別信号(DS1)を設定する為の一例であり、例えばWCOMのデータが連続で10点以上同じ電圧値であった場合にはDS=1とする、などの処理でも構わない。
【0088】
次に、図16を用いて電圧レベル判別手段260の説明を行う。図16中に斜線を付して示した領域は、WCOMの電圧Vnが、Ya・Vmax≦Vn<Xa・Vmax又はXb・Vmax<Vn≦Yb・Vmaxとなる領域を示している。又は、WCOMの電圧Vnに対応するデューティー比Dnが、Ya≦Dn<Xa又はXb<Dn≦Ybとなる領域と言い換えることもできる。電圧レベル判別手段260は、図16中に示した期間3および期間5のように、WCOMの電圧値が図16中に示したYa・Vmax≦Vn<Xa・Vmaxの斜線領域に入る場合は、電圧レベル判別信号(DS2)を「01」として出力し、またXb・Vmax<Vn≦Yb・Vmaxの斜線領域に入る場合は、電圧レベル判別信号(DS2)を「10」として出力し、それ以外の場合はDS2を「00」として出力する。
【0089】
図18および図19は、電圧レベル判別信号設定処理を示した説明図である。具体的には電圧レベル判別手段260がWCOMを基に、電圧レベル判別信号(DS2)を設定する電圧レベル判別信号設定処理の一例を示す。ここで、図18はWCOMの電圧を基にDS2を設定する処理方法である。図18では、WCOMの情報を基にDS2を設定する場合の例を示すが、前述したように、COMの情報を基に判別する方法でも構わない。図18では、まずDS2の初期値としてDS2=00を設定する。そして時間t0におけるWCOMの電圧データV0が、上述した図16の斜線領域に入っているかを判断する。V0がYa・Vmax≦Vn<Xa・Vmaxの斜線領域に入っている場合にはV0のデータに対してDS2=01を設定し、V0がXb・Vmax<Vn≦Yb・Vmaxの斜線領域に入っている場合にはV0のデータに対してDS2=10を設定し、どちらの斜線領域にも入っていない場合にはDS2=00を設定する。その後、現在のデータがWCOMの波形終了点(n=m)かを判別する。ここではn=0であるので、WCOMの次のデータV1が転送されてくる。そうして、n=mとなるまで上述したフローを繰り返す。また、n=mとなると、WCOMが連続出力される設定になっているかを判別する。連続出力の設定になっている場合は、再び図18中に示すS201に戻り、WCOMの最初のデータ(n=0)から上述したフローを繰り返す。連続出力の設定になっていない場合は、図18のフローを終了する。以上のようなフローにより、WCOMの電圧データVnを基に、WCOMの1波形に渡って電圧レベル判別信号(DS2)を設定することが可能となる。
【0090】
次に、図19はWCOMから算出したデューティー比を基にDS2を設定する処理方法である。図19は図18に対して、S301に示すように、WCOMの電圧データVnからデューティー比Dn(Dn=Vn/Vmax)を算出するフローが追加されている。またS302およびS304において、S301で算出したDnが図16に示すYa≦Dn<Xa又はXb<Dn≦Ybの斜線領域に入っているかを判断する。後は図18に示すフローと同様である。以上のようなフローにより、WCOMの電圧Vnから算出したデューティー比を基に、WCOMの1波形に渡って電圧レベル判別信号(DS2)を設定することが可能となる。
【0091】
以上のようにして生成されたDC判別信号(DS1)および電圧レベル判別信号(DS2)は、図2および図14に示すキャリア周波数変更手段270に入力される。キャリア周波数変更手段270では、DS1が「1」かつDS2が「01」の場合に、キャリア周波数設定信号(flag)を「01」として出力する。またDS1が「1」かつDS2が「10」の場合に、flagを「10」として出力する。それ以外の場合は、flagを「00」として出力する。
図20は、キャリア周波数変更手段270の構成例を示した説明図である。図20(a)では、上述したDS1とDS2と、およびflagの対応関係が記憶されたテーブルによってflagを生成する。図20(b)では、DS1とDS2とを入力とした「AND」回路によってflagを生成する。図20(c)では、図示したflag設定処理を信号処理回路等で行うことで、flagを生成する。
【0092】
以上のようにして生成されたキャリア周波数設定信号(flag)を、変調回路220の三角波発生回路280に入力することで、WCOMに基づいて、前述したキャリア周波数fc0、fc1およびfc2の変更が実施される。その結果、図15(b)に示したように、アクチュエーターに対して一定電圧を連続的に出力する状態で、かつどのような駆動波形信号の電圧値(又はデューティー比、又は駆動信号の電圧値)の条件である場合にも、前述したデジタル電力増幅器230における電力損失の増加を回避することが可能となる。
【0093】
以上に説明した第1実施例の方法を用いることで、図16に示したWCOMに限らず、種々のWCOMに対して適切にキャリア周波数設定信号(flag)を設定することができる。
図21は、第1実施例で駆動波形信号情報にフラグが設定されたその他の態様を示した説明図である。たとえば、図21(a)に示すように、WCOMの途中に電圧が一定で、電圧VがXb・Vmax<V≦Yb・Vmax(デューティー比Dの場合はXb<D≦Yb)の斜線部に入る期間が存在している場合には、この期間のflagを「10」とし、キャリア周波数を第二キャリア周波数fc2に設定することができる。また、図21(b)に示すように、電圧が一定の期間が存在していても、WCOMの電圧値V(又はデューティー比D)が図中の斜線部に入らない場合には、この期間のflagを「00」とし、キャリア周波数を基準キャリア周波数fc0に設定することができる。このように、前述した第1実施例の方法によれば、種々のWCOMに対して適切にflagを設定して、キャリア周波数を切り換えることができる。その結果、前述したデジタル電力増幅器230での電力損失の増加を回避することが可能となる。
【0094】
A−6.第1実施例の変形例:
以上に説明した第1実施例では、キャリア周波数設定信号(flag)をリアルタイムで生成する場合を説明していた。ただし、キャリア周波数設定信号(flag)は予め用意するようにしてもよい。
【0095】
図22は、第1実施例の変形例の液体噴射装置の一部を示した説明図である。具体的には、キャリア周波数設定信号(flag)を予め用意するようにした場合の、アクチュエーター駆動回路200の構成の一部を示している。第1実施例の場合と異なり、ここでは前述したDC判別手段250、電圧レベル判別手段260、およびキャリア周波数変更手段270が、駆動波形信号発生回路210に含まれている場合を例に説明を行う。ただし、DC判別手段250、電圧レベル判別手段260、およびキャリア周波数変更手段270は、駆動波形信号発生回路210の外部に設ける構成としても構わない。また変調回路220は、第1実施例の場合と同様に、外部から来るflagに基づいてキャリア周波数を変更することが可能となっている。
【0096】
図22に示すように、駆動波形信号発生回路210中の波形メモリーには、新たにflagを記憶する為の領域が設けられている。ただし、波形メモリーのflagを記憶する為の領域には、キャリア周波数変更手段270から出力されるflagデータが書き込まれるものとする。駆動波形信号発生回路210中の駆動波形信号制御手段は、上述した波形メモリー中に記憶されたflagデータを、変調回路220の三角波発生回路280に対して出力する経路が新たに設けられている。また、駆動波形信号制御手段から変調回路220に出力する駆動波形信号(WCOM)に対して、DC判別手段250および電圧レベル判別手段260に出力する駆動波形信号をpreWCOMと称し、区別する。preWCOMは、WCOMと同じ駆動波形信号のデータであるが、WCOMよりも速い速度でデータを出力することが可能であるとする。
【0097】
図23は、第1実施例の変形例における、キャリア周波数設定信号書込み処理を示した説明図である。ここではまず、図23に示すようなキャリア周波数設定信号(flag)書込み処理を行い、駆動波形信号発生回路210中の波形メモリーに、WCOMの電圧データVnに対応するflagデータflnを、n=0〜mまで(すなわちWCOMの一波形分)記憶させる。尚、図23中のS500はflagの初期値として、flag=00を設定している。また、図23中のS502で取得するDS1は、図17に示すフローによって、DC判別手段250が出力するものである。同様に、図23中のS503で取得するDS2は、図18および図19に示すフローによって、電圧レベル判別手段260が出力するものである。図23中のS504は、図20で示した処理を実行することで、Vnに対するflag(fln)を生成する。ここで、波形メモリーに登録されているWCOMのデータが書き換えられない限り、図23に示すフローは一回実行しておくだけでよい。また、波形メモリーに複数のWCOMを記憶できる領域が設けられている場合には、それぞれのWCOMに対して図23のフローを一度ずつ実行しておけばよい。
【0098】
図23のフローを一度実行した後、駆動波形信号制御手段は、変調回路220の比較器290に対して、WCOMの電圧データVnを順次出力する。また同時に、変調回路220の三角波発生回路280に対して、図23のフローで予め記憶され、かつ電圧データVnに対応したflagデータ(fln)を順次出力する。このようにしても、前述したデジタル電力増幅器230での電力損失の増加を回避することが可能となる。また、ここでは駆動波形信号発生回路210中の波形メモリーにキャリア周波数設定信号(flag)を記憶する為の領域を設けていた。これに対し、flagを記憶する為のメモリーをキャリア周波数変更手段270に持たせておき、キャリア周波数変更手段270から直接変調回路220にflagを出力する構成としても構わない。
【0099】
A−7.第1実施例の変形例2:
図24は、第1実施例の変形例2の液体噴射装置の一部を示した説明図である。なお、図23に示したフローを人が実行し、その結果得られるflagデータを、波形メモリーに予め記憶させておくことでも対応できる。その場合は、図24に示すように、図22からDC判別手段250、電圧レベル判別手段260、およびキャリア周波数変更手段270を省いた構成で対応できる。このようにしても、前述したデジタル電力増幅器230での電力損失の増加を回避することが可能となる。
【0100】
B.第2実施例:
上述した第1実施例では、キャリア周波数fcを、基準キャリア周波数fc0と、第一キャリア周波数fc1と、第二キャリア周波数fc2の3種類に切り換えるものとしていた。すなわち、アクチュエーターに対して一定電圧を連続的に出力する状態で、WCOMの電圧値VがV<Xa・Vmax(デューティー比Dの場合はD<Xa)となる場合には、キャリア周波数をfc0からfc1に一気に引き下げるものとしていた。また、アクチュエーターに対して一定電圧を連続的に出力する状態で、COMの電圧値VがV>Xb(Dの場合はD>Xb)となる場合には、キャリア周波数をfc0からfc2に一気に引き下げるものとしていた。これに対して、より多くの種類のキャリア周波数fcを用意しておき、キャリア周波数fcを徐々に切り換えるようにしても良い。以下では、このような第2実施例について説明する。尚、第2実施例では図2で示した構成を用いて、前述した第1実施例に対して異なる部分についてのみ説明し、同様な部分については説明を省略する。
【0101】
B−1.第2実施例での電力損失の増加の回避方法:
前述した第1実施例と同様に、第2実施例においても、WCOMの電圧値はYa・Vmax〜Yb・Vmaxの範囲で用いるものとする。ただし、便宜上、本実施例では上述したデューティー比YaをY1aと表記し、またYbをY1bと表記する。
図25は、第2実施例において、デジタル電力増幅器230における電力損失の増加を回避可能な理由を示した説明図である。具体的には第2実施例でキャリア周波数を序所に切り替えた場合に、デジタル電力増幅器230での電力損失の増加を回避可能な理由を示した説明図である。図25(b)に示すように、第2実施例では、WCOMの電圧値がY1a・Vmax〜Xa・Vmaxの間に、Y2a・Vmax、Y3a・Vmax、Y4a・Vmaxといった複数の電圧値を設定する。但し、Y2a、Y3a、Y4aはデューティー比であり、Y1a<Y2a<Y3a<Y4a<Xaの関係にあるとする。図25(a)に示すように、WCOMの電圧値VがY1a・Vmax≦V<Y2a・Vmaxの間ではキャリア周波数をfc1a、Y2a・Vmax≦V<Y3a・Vmaxの間ではキャリア周波数をfc2a、Y3a・Vmax≦V<Y4a・Vmaxの間ではキャリア周波数をfc3a、Y4a・Vmax≦V<Xa・Vmaxの間ではキャリア周波数をfc4aといったように、多段階にキャリア周波数fcを切り換えていく。ここでは、WCOMの電圧値VがY1a・Vmax≦V<Xa・Vmaxの間において、fc1a〜fc4aまでの4種類のキャリア周波数に切換え可能な場合を例に説明を行う。ただし、fc1a<fc2a<fc3a<fc4a<fc0であるとする。
【0102】
次に、WCOMの電圧値がXb・Vmax〜Y1b・Vmaxの間についても同様に、たとえばY4b・Vmax、Y3b・Vmax、Y2b・Vmaxといった複数の電圧値を設定する。但し、Y4b、Y3b、Y2bはデューティー比であり、Xb<Y4b<Y3b<Y2b<Y1bの関係にあるとする。WCOMの電圧値VがXb・Vmax<V≦Y4b・Vmaxの間ではキャリア周波数をfc4b、Y4b・Vmax<V≦Y3b・Vmaxの間ではキャリア周波数をfc3b、Y3b・Vmax<V≦Y2b・Vmaxの間ではキャリア周波数をfc2b、Y2b・Vmax<V≦Y1b・Vmaxの間ではキャリア周波数をfc1bといったように、多段階にキャリア周波数fcを切り換えていく。ただし、fc1b<fc2b<fc3b<fc4b<fc0であるとする。また、WCOMの電圧値VがXa・Vmax≦V≦Xb・Vmaxの間では、キャリア周波数は第一実施例で述べた基準キャリア周波数fc0を選択する。
【0103】
図25(b)に示すように、上述したキャリア周波数fcnaは、WCOMの電圧値VがYna・Vmax≦V<Y(n+1)a・Vmaxの間において、前述したコイル電流の振幅|IA|が閾値電流Ithを下回らない周波数の上限値とする。ただし、nは1〜4の整数で、Y5aはXaと同じデューティー比であるとする。また同様に、上述したキャリア周波数fcnbは、WCOMの電圧値VがY(n+1)b・Vmax<V≦Ynb・Vmaxの間において、前述したコイル電流の振幅|IA|が閾値電流Ithを下回らない周波数の上限値とする。ただし、Y5bはXbと同じデューティー比であるとする。以上のように、各WCOMの電圧値(又はデューティー比)の期間におけるキャリア周波数fcnaおよびfcnbを求めておき、各WCOMの電圧値(又はデューティー比)の期間に応じてキャリア周波数を切り換えていけば、どのようなWCOMの電圧値(又はデューティー比、又はCOMの電圧値)の条件にある場合にも、|IA|がIthを下回らないようにすることができる。すなわち、前述した状態[I]や状態[J]の発生を回避し、前述したデジタル電力増幅器230での電力損失の増加を回避することが可能となる。
【0104】
前述したように、図2に示す変調回路220は、キャリア周波数設定信号(flag)を三角波発生回路280に出力することで、flagに基づいてキャリア周波数を変更することが可能となっている。第2実施例ではflagを4ビットの信号とし、前述した9つのキャリア周波数に変更可能であるとする。
図26は、第2実施例における4bitのflagと、選択されるキャリア周波数との関係を示したテーブルの例を示した説明図である。具体的には前述した4bitのflagと、選択されるキャリア周波数の関係を示したテーブルの例を示す。
【0105】
尚、以後は前述したfc0、fcna、fcnb(n=1〜4)の9種類のキャリア周波数に変更可能な場合を例に説明を行うが、以下のようにすることで、fcnaとfcnbとは同じ周波数としても構わない。すなわち、アクチュエーターに対して一定電圧を連続的に出力している状態で、WCOMの電圧値VがYna・Vmax≦V<Y(n+1)a・Vmax又はY(n+1)b・Vmax<V≦Ynb・Vmaxのどちらの領域にある場合においても、図8(b)の状態[I]および状態[J]の発生を回避可能なキャリア周波数をfcn’(ただし、nは1〜4の整数)とすれば、前述したfcnaおよびfcnbは同じ周波数fcn’としても構わない。この場合は、flagを3ビットの信号とし、前述したfc0とfcn’の5種類とのキャリア周波数に変更可能な構成とすればよい。
【0106】
図25に示したように、第2実施例ではWCOMの電圧値の範囲(又はデューティー比の範囲)を9つに分けた場合を例に説明している。従って第2実施例では、図2に示す電圧レベル判別手段260は、9つのWCOMの電圧値を区別可能なように、4bitの電圧レベル判別信号(DS2)を出力するものとする。前述したように、WCOMの電圧値とデューティー比Dとは一対一の対応関係にある。従って電圧レベル判別手段260は、WCOMの電圧値を判別してDS2を出力してもよいし、取得したWCOMの情報を基にデューティー比の範囲を判別してDS2を出力して構わない。
【0107】
図27は、第2実施例における電圧レベル判別手段260が、電圧レベル判別信号を設定する電圧レベル判別信号設定処理の一例を示した説明図である。具体的には第2実施例における電圧レベル判別手段260が、WCOMを基に電圧レベル判別信号(DS2)を設定する電圧レベル判別信号設定処理の一例を示す。図27は、WCOMの電圧値を基にDS2を設定する処理方法である。図27では、まずステップS600において、DS2の初期値としてDS2=0000を設定する。そしてステップS602〜S618において、時間t0におけるWCOMの電圧データV0が、上述した9つの電圧値範囲のいずれに該当するかを判断し、該当する電圧値範囲に応じて、図27に示すように4bitのDS2を設定する。その後、現在のデータがWCOMの波形終了点(n=m)かを判別する。ここではn=0であるので、WCOMの次のデータV1が転送されてくる。そうして、n=mとなるまで上述したフローを繰り返す。また、n=mとなると、WCOMが連続出力される設定になっているかを判別する。連続出力の設定になっている場合は、再び図27中に示すS601に戻り、WCOMの最初のデータ(n=0)から上述したフローを繰り返す。連続出力の設定になっていない場合は、図27のフローを終了する。以上のようなフローにより、WCOMの電圧データVnを基に、WCOMの1波形に渡って電圧レベル判別信号(DS2)を設定することが可能となる。
【0108】
また、WCOMから算出したデューティー比を基にDS2を設定する場合は、図27の設定処理を以下のように変更する。まず、図19に示したステップS301を、図27のステップS601の直後に挿入する。また図27におけるステップS602、S604、S606、S608、S610、S612、S614、S616の判断条件を、WCOMの電圧値に対応するデューティー比の条件(図25参照)に置き換える。以上の処理を行うことで、WCOMの電圧Vnから算出したデューティー比を基に、WCOMの1波形に渡って電圧レベル判別信号(DS2)を設定することが可能となる。尚、図2に示すDC判別手段250は、前述した第1実施例と同様に、図17のDC判別信号設定処理によってDC判別信号(DS1)を出力する。
【0109】
以上のようにして得られるDC判別信号(DS1)、および電圧レベル判別信号(DS2)を基に、図2に示すキャリア周波数変更手段270は4bitのキャリア周波数設定信号(flag)を出力する。
図28は、第2実施例におけるDC判別信号および電圧レベル判別信号と、キャリア周波数設定信号との対応関係を示したテーブルの説明図である。具体的にはDS1およびDS2と、flagとの対応関係を示したテーブルの例を示す。図29は、第2実施例のキャリア周波数変更手段270における、キャリア周波数切り換え処理の例を示した説明図である。第2実施例のキャリア周波数変更手段270は、図29に示すキャリア周波数切り換え処理のフローに従って、図28に示すテーブル関係を基にキャリア周波数設定信号(flag)を出力するものとする。
【0110】
ここで、図29に示すキャリア周波数切り換え処理について説明する。
図29において、まず4ビットのflagの初期値を0000に設定する。次に、一番目のWCOMの電圧データV0に対して、DC判別手段250で生成されたDS1の情報を取得する。また、V0に対して、電圧レベル判別手段260で生成されたDS2の情報も取得する。前述したように、DS1は図17に示すフローによって得られる。またDS2は、図18および図19に示すフローによって得られる。そしてステップS704において、図28に示すテーブル関係を基に、取得したDS1およびDS2の情報に対応するflagを設定する。
【0111】
図29に示したフローは、キャリア周波数を9種類の中から選択する場合の例であるが、さらに多くの種類のキャリア周波数を選択可能にする場合は、例えば図29のステップS704において参照するテーブルに、より多くの種類のflag情報を持たせておけばよい。ただし、DS2とflagのbit数は、選択可能とするキャリア周波数の種類の数に応じて変更する必要がある。従って、Y1a・Vmax〜Xa・Vmax、又はXb・Vmax〜Y1b・Vmaxの間を分割する電圧範囲の種類も、適宜設定することができる。
【0112】
以上のようにして生成されたキャリア周波数設定信号(flag)を、変調回路220の三角波発生回路280に入力することで、WCOMに基づいて、前述した9種類のキャリア周波数の変更が実施される。その結果、アクチュエーターに対して一定電圧を連続的に出力する状態で、かつどのような駆動波形信号の電圧値(又はデューティー比、又は駆動信号の電圧値)の条件である場合にも、前述したデジタル電力増幅器230における電力損失の増加を回避することが可能となる。
【0113】
尚、平滑フィルター240はローパスフィルターである為、キャリア周波数fcの値を引き下げるほど、平滑フィルター240におけるキャリア周波数成分の振幅減衰量は小さくなる。すなわち、COM(駆動信号)に重畳されるキャリアリップルの振幅が大きくなる。前述したように、第2実施例では、WCOMの電圧値がYa・Vmax≦V<Xa・Vmax又はXb・Vmax<V≦Yb・Vmaxの範囲において、キャリア周波数を段階的に引き下げている。
図30は、第1実施例と比較して、第2実施例では、COMに重畳するキャリアリップルを抑制しながら、デジタル電力増幅器230での電力損失の増加を回避することが可能である様子を示した説明図である。従って図30に示すように、第1実施例と比較して、COMに重畳するキャリアリップルを抑制しながら、前述したデジタル電力増幅器230での電力損失の増加を回避することが可能となる。
【0114】
B−2.第2実施例の変形例:
上述した第2実施例では、WCOMの電圧値(又はデューティー比)に応じてキャリア周波数fcを多段階に切り換えるものとして説明した。これに対して、WCOMの電圧値(又はデューティー比)に応じてキャリア周波数fcを連続的に切り換えるようにしても良い。
【0115】
ここでは便宜上、まずデューティー比に応じてキャリア周波数fcを連続的に切り換える場合について説明する。
図31は、第2実施例の変形例の液体噴射装置100の一部を示した説明図である。具体的にはデューティー比に応じてキャリア周波数fcを連続的に切り換える場合の、液体噴射装置100の一部の構成例を示す。図31に示した電圧レベル判別手段260は、図19の処理で生成されるDS2に加え、図19のステップS301で算出されるデューティー比Dnの情報についても、キャリア周波数変更手段270に対して出力する。図31に示すように、DS2およびDnの情報を一つの信号(DS2’)として、まとめてキャリア周波数変更手段270に出力してもよい。また、図31におけるDC判別手段250は、前述した第1実施例と同様に、図17のDC判別信号設定処理によってDC判別信号(DS1)を出力する。
【0116】
図32は、第2実施例の変形例における、キャリア周波数切り換え処理の例を示した説明図である。具体的にはデューティー比に応じてキャリア周波数fcを連続的に切り換えるために行われる、キャリア周波数切り換え処理のフローチャートである。図31に示すキャリア周波数変更手段270は、図32に示すフローに従って、キャリア周波数設定信号(flag)を出力する。ただし、図31に示すflagは、図32に示すフローに従って算出されるキャリア周波数そのものの値であるとする。もちろん、図31に示すflagはキャリア周波数の値に関連付けられたデータとして出力されても構わない。尚、図31における変調回路220は、キャリア周波数の値を示すflag情報を基に、キャリア周波数fcを設定および変更可能な構成となっている。
【0117】
次に、図32に示すキャリア周波数切り換え処理のフローチャートについて説明する。この処理は、駆動波形信号発生回路210がWCOMの出力を開始すると、キャリア周波数変更手段270によって実行される処理である。図32に示すキャリア周波数切り換え処理では、先ずステップS800において、キャリア周波数fcを前述した基準キャリア周波数fc0に設定しておく。そして、DC判別手段250において、WCOMの電圧データVnに対して生成されたDS1を取得する。また、電圧レベル判別手段260において、WCOMの電圧データVnに対して生成されたDS2と、Vnに対して算出されたデューティー比Dnを取得する。
【0118】
次に、取得したDS1、DS2、Dnの情報を基に、DS1=1かつDS2=01の場合は、デューティー比DがDn≦D<Xaの範囲で、コイル電流の振幅値|IA|≧Ithとなるキャリア周波数fcx1を算出し、算出した周波数fcx1をflagとして設定する。またDS1=1かつDS2=10の場合は、デューティー比DがXb<D≦Dnの範囲で、コイル電流の振幅値|IA|≧Ithとなるキャリア周波数fcx2を算出し、算出した周波数fcx2をflagとして設定する。また、それ以外の条件の場合は、flagを基準キャリア周波数fc0に設定する。続いて、図32の処理S802に戻り、次のWCOMの電圧データVn+1に対して上述した処理を繰り返す。また、n=mとなると、WCOMが連続出力される設定になっているかを判別する。連続出力の設定になっている場合は、再び図32中に示すS801に戻り、WCOMの最初のデータ(n=0)から上述したフローを繰り返す。連続出力の設定になっていない場合は、図32のフローを終了する。以上が、デューティー比に応じてキャリア周波数fcを連続的に切り換える場合の例についての説明である。
【0119】
次に、WCOMの電圧値に応じてキャリア周波数fcを連続的に切り換える場合の例について、前述したデューティー比の場合との相違点を中心に説明する。まず、図31に示した液体噴射装置100の構成例における電圧レベル判別手段260は、図18の処理で生成されるDS2を出力するようにする。また前述した場合と異なり、電圧レベル判別手段260はデューティー比Dnの情報については出力しない。ただし、図32に示したキャリア周波数切り換え処理において、ステップS804で行う処理を、図19で示したステップS301の内容に置き換える。以上のような処理を行うことで、WCOMの電圧値に応じてキャリア周波数fcを連続的に切り換えることが可能となる。
【0120】
図33は、第2実施例の変形例において、デジタル電力増幅器230での電力損失の増加を回避可能な理由を示した説明図である。
以上に説明した第2実施例の変形例では、図33に示すように、アクチュエーターに対して一定電圧を連続的に出力する状態において、WCOMの電圧値VがV<Xa・Vmax又はV>Xb・Vmaxとなった場合でも、平滑フィルター240のコイルに流れる電流の振幅|IA|が、閾値電流Ithに保たれるようにキャリア周波数fcを連続的に切り換えることができる。このため、出力に重畳するキャリアリップルを抑制しながら、前述したデジタル電力増幅器230での電力損失の増加を回避することが可能となる。
【0121】
C.第3実施例:
C−1.液体噴射型印刷装置(インクジェットプリンター)構成:
図34は、第1実施例、第2実施例およびそれぞれの変形例で説明した液体噴射装置100を、インクジェットプリンターとして適用した場合の、噴射ヘッドの内部構造を示した説明図である。具体的には前述した本発明における実施例のいずれかの液体噴射装置100を液体噴射型印刷装置(インクジェットプリンター)として適用した場合の、噴射ヘッド300の内部構造を示した説明図である。図示されるように、噴射ヘッド300の内部には、インクを溜めておく小さな複数のインク室301が設けられており、各インク室301の底面には、微細なインクノズル302が形成されている。また、各インク室301の壁面(図示した例では天井部分)には、前述したアクチュエーター116としてピエゾ素子303が設けられている。ピエゾ素子303には、前述したアクチュエーター駆動回路200から、駆動信号(COM)が印加される。何れかのピエゾ素子303に駆動信号を印加すると、そのピエゾ素子303が変形してインク室301の壁面(図示した例では天井)を変形させる。その結果、インク室301内のインクが押し出されるようにして、インクノズル302からインク滴として吐出されることになる。
【0122】
C−2.第3実施例での電力損失の増加の回避方法:
図35は、インクジェットプリンターのアクチュエーターであるピエゾ素子303に印加する駆動信号の基となる駆動波形信号の例を示した説明図である。具体的にはピエゾ素子303に印加する駆動信号(COM)の基となる駆動波形信号(WCOM)を例示した説明図である。インクジェットプリンターの噴射ヘッド300では、図35に示した様な台形状の駆動波形(時間とともに電圧が上昇し、その後降下して元の電圧値に戻る波形)をピエゾ素子303に印加することによって、インク滴を吐出している。このような駆動波形が印加されると、図35に示す期間A’や、さらには待機期間である期間B’において、前述したデジタル電力増幅器における電力損失の増加が起こり得る。そのような場合にも、前述した本発明における実施例のいずれかの液体噴射装置をインクジェットプリンターとして適用することで、前述した電力損失の増加を回避することが可能となる。
【0123】
以上、各種実施例のアクチュエーター駆動回路について説明したが、本発明は上記すべての実施例に限られるものではなく、その要旨を逸脱しない範囲において種々の態様で実施することが可能である。例えば、薬剤や栄養剤を内包するマイクロカプセルを形成することに用いる液体噴射装置など、医療機器を含む様々な電子機器に本実施例のアクチュエーター駆動回路を適用することで、電力効率が良く小型化の電子機器を提供することができる。また、前述したインクジェットプリンターに搭載されて、インクを噴射する噴射ノズルを駆動するためのアクチュエーター駆動回路に対しても、本発明を好適に適用することが可能である。
【符号の説明】
【0124】
100…液体噴射装置、110…脈動発生部、111…ノズル、112…流体噴射管、113…第2ケース、114…第1ケース、115…流体室、116…アクチュエーター、120…流体供給手段、121…第1接続チューブ、122…第2接続チューブ、123…流体容器、130…制御部、150…配線ケーブル、200…アクチュエーター駆動回路、210…駆動波形信号発生回路、220…変調回路、230…デジタル電力増幅器、240…平滑フィルター、250…DC判別手段、260…電圧レベル判別手段、270…キャリア周波数変更手段、280…三角波発生回路、290…比較器、300…インクジェットプリンターの噴射ヘッド、301…インク室、302…インクノズル、303…ピエゾ素子。
【技術分野】
【0001】
本発明は、液体噴射装置および液体噴射装置を備えた医療機器において、液体の噴射を制御するアクチュエーターに駆動信号を印加して駆動する技術に関する。
【背景技術】
【0002】
医療用液体噴射装置(例えば、特許文献1参照)や液体噴射型印刷装置(インクジェットプリンター)のように、アクチュエーターに駆動信号を印加することによって液体を噴射する液体噴射装置は数多く存在する。このような液体噴射装置のアクチュエーターを駆動するためには、ある程度の電力を有する駆動信号が必要となる。そこで、駆動信号の元となる駆動波形信号を電力増幅することによって駆動信号を生成することが行われる。ここで、アナログの駆動波形信号をアナログ的に電力増幅してアナログの駆動信号を直接生成したのでは大きな電力損失が発生して電力効率が低下するので、いわゆるD級増幅器を用いて電力増幅する技術が提案されている(例えば、特許文献2、特許文献3参照)。
【0003】
D級増幅器は、次のようにして電力増幅を行う。先ず、アナログの駆動波形信号をパルス変調することによって変調信号を生成する。パルス変調には幾つかの方式が知られているが、パルス幅変調と呼ばれる方式が使用されることが一般的である。パルス幅変調と呼ばれる方式とは、変調しようとする駆動波形信号を、一定周期(変調周期)で繰り返される三角波形と比較して、駆動波形信号の電圧の方が三角波形の電圧よりも高い期間ではハイを出力し、逆に駆動波形信号の電圧の方が低い期間ではローを出力することによって、ハイとローとを繰り返す変調信号を生成する変調方式である。このようにして得られた変調信号は、駆動波形信号の電圧が高くなるほど、一変調周期内でのハイの期間の比率(オンデューティー比又はデューティー比。本明細書中ではデューティー比と呼ぶ)が高くなる。詳細は後述するが、デューティー比は駆動波形信号の電圧値又は駆動信号の電圧値と一対一の関係にある。
【0004】
D級増幅器では、パルス変調によって得られたデジタルの変調信号を電力増幅した後、平滑フィルターを通してアナログ信号に変換することによって、電力増幅された駆動信号を生成する。このようにしてデジタルの変調信号を電力増幅すれば、アナログの駆動波形信号をアナログのまま電力増幅する場合に比べて電力損失を大幅に低減することができるので、駆動信号を生成する際の電力損失を大幅に低減することが可能である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−071088号公報
【特許文献2】特開平11−204850号公報
【特許文献3】特開2007−96364号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、D級増幅器を用いてアクチュエーターを駆動する場合、アクチュエーターに対して一定電圧の駆動信号を連続的に出力する状態において、駆動波形信号の電圧値がある条件(詳細は後述する)になる場合は、増幅時に大きな電力損失が発生することがあった。その結果、アクチュエーターを駆動する際の電力効率が低下する場合があるという問題があった。
【0007】
この発明は、従来の技術が有する上述した課題の少なくとも一部を解決するためになされたものであり、アクチュエーターに対して一定電圧の駆動信号を連続的に出力する状態においても、駆動波形信号の電圧値(又は駆動信号の電圧値、又はデューティー比)によらず、どのような条件下でも常に効率よく液体噴射装置のアクチュエーターを駆動することが可能な技術の提供を目的とする。
【課題を解決するための手段】
【0008】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0009】
[適用例1]アクチュエーターに対して駆動信号を印加することによって、液体を噴射する液体噴射装置であって、前記駆動信号の基準となる駆動波形信号を発生する駆動波形信号発生回路と、前記駆動波形信号をパルス変調して変調信号を生成する変調回路と、前記変調信号を電力増幅して電力増幅変調信号を生成するデジタル電力増幅器と、前記電力増幅変調信号を平滑化することによって前記駆動信号を生成する平滑フィルターと、を備え、前記変調回路は、前記アクチュエーターの電位を一定に保つ期間に、前記駆動波形信号の電圧値に応じて、キャリア周波数を変更することを特徴とする液体噴射装置。
【0010】
これによれば、上記液体噴射装置において、液体の噴射を制御するアクチュエーターに対して一定の駆動信号を連続的に出力する状態で、かつどのような駆動波形信号の電圧値(又は駆動信号の電圧値、又はデューティー比)の条件である場合にも、デジタル電力増幅器に大きな電力損失が発生することを回避することが可能となる。
【0011】
詳細なメカニズムについては後述するが、アクチュエーターに一定の電圧を連続的に出力する状態で、かつ駆動波形信号の電圧値(又は駆動信号の電圧値、又はデューティー比)が後述する第一の電圧値より低いか又は後述する第二の電圧値より高い場合に、デジタル電力増幅器に大きな電力損失が発生することが見いだされた。更に、上述した条件下では、変調回路がパルス変調する際のキャリア周波数を変更することによって、デジタル電力増幅器における電力損失の増加を回避することが可能であることも見いだされた。従って、アクチュエーターに一定の電圧を連続的に出力している状態で、かつ駆動波形信号の電圧値が所定値より低いか又は所定値より高い場合には、キャリア周波数を変更することで、デジタル電力増幅器での増幅時に大きな電力損失が発生することを回避して、効率よく液体噴射装置のアクチュエーターを駆動することが可能となる。
【0012】
[適用例2]上記に記載の液体噴射装置であって、前記変調回路は、前記駆動波形信号の電圧値が予め定められた所定の電圧値よりも小さい範囲にある場合に、前記キャリア周波数を、前記所定の電圧値以上の範囲で設定される基準キャリア周波数よりも低いキャリア周波数に設定することを特徴とする。
【0013】
これによれば、適用例1の液体噴射装置のアクチュエーターに一定の電圧を連続的に出力する状態で、かつ駆動波形信号の電圧値が後述する所定の電圧値(又はデューティー比、又は駆動信号電圧値)より小さい場合にも、デジタル電力増幅器での増幅時に大きな電力損失が発生することを回避して、効率よく液体噴射装置のアクチュエーターを駆動することが可能となる。
【0014】
[適用例3]上記に記載の液体噴射装置であって、前記変調回路は、前記駆動波形信号の電圧値が予め定められた所定の電圧値よりも大きい範囲にある場合に、前記キャリア周波数を、前記所定の電圧値以下の範囲で設定される基準キャリア周波数よりも低いキャリア周波数に設定することを特徴とする。
【0015】
これによれば、適用例1の液体噴射装置のアクチュエーターに一定の電圧を連続的に出力する状態で、かつ駆動波形信号の電圧値が後述する所定の電圧値(又はデューティー比、又は駆動信号の電圧値)より大きい場合にも、デジタル電力増幅器での増幅時に大きな電力損失が発生することを回避して、効率よく液体噴射装置のアクチュエーターを駆動することが可能となる。
【0016】
[適用例4]上記に記載の液体噴射装置であって、前記変調回路は、第一の電圧値と、前記第一の電圧値よりも大きい第二の電圧値とが予め定められており、前記駆動波形信号の電圧値が前記第一の電圧値よりも小さい場合に、前記キャリア周波数を、前記第一の電圧値から前記第二の電圧値までの範囲で設定される基準キャリア周波数よりも低い第一のキャリア周波数に設定し、前記駆動波形信号の電圧値が前記第二の電圧値よりも大きい場合に、前記キャリア周波数を、前記基準キャリア周波数よりも低い第二のキャリア周波数に設定することを特徴とする。
【0017】
これによれば、適用例1の液体噴射装置のアクチュエーターに一定の電圧を連続的に出力する状態で、駆動波形信号の電圧値が後述する第一の電圧値より小さい場合や、駆動波形信号の電圧値が後述する第二の電圧値より大きい場合にも、デジタル電力増幅器での増幅時に大きな電力損失が発生することを回避して、効率よく液体噴射装置のアクチュエーターを駆動することが可能となる。
【0018】
[適用例5]上記記載の液体噴射装置を備えたことを特徴とする医療機器。
【0019】
これによれば、上記記載の液体噴射装置を備えた医療機器においても、該液体噴射装置のアクチュエーターに一定の電圧を連続的に出力する状態で、どのような駆動波形信号の電圧値(又は変調信号のデューティー比、又は駆動信号の電圧値)の場合にも、デジタル電力増幅器での増幅時に大きな電力損失が発生することを回避して、効率よく医療機器に備えた液体噴射装置のアクチュエーターを駆動することが可能となる。
【図面の簡単な説明】
【0020】
【図1】第1実施例の液体噴射装置の構成を示した説明図。
【図2】第1実施例の液体噴射装置に搭載されたアクチュエーター駆動回路の回路構成を示した説明図。
【図3】一定電圧のCOMを連続的に出力する場合に、デジタル電力増幅器における電力損失が、デューティー比に応じて増加する様子を示した説明図。
【図4】デジタル電力増幅器の詳細な構成を示した回路図。
【図5】一定電圧のCOMを出力した場合に、平滑フィルターのコイルに流れる電流がほぼ直線的に変化する様子を示した説明図。
【図6】一定電圧のCOMを出力した場合に、平滑フィルターのコイルに流れる電流がほぼ直線的に変化する理由を示した説明図。
【図7】一定電圧のCOMを出力した場合に、平滑フィルターのコイルに流れる電流の振幅が、デューティー比に応じて変化する様子を示した説明図。
【図8】デジタル電力増幅器の動作が切り換わる際のACOMの様子を示した説明図。
【図9】一定電圧のCOMを出力した場合に、平滑フィルターのコイルに大きな電流が流れる条件では、電力増幅時の電力損失が低下する理由を示した説明図。
【図10】一定電圧のCOMを出力した場合に、平滑フィルターのコイルに大きな電流が流れる条件では、電力増幅時の電力損失が低下する理由を示した説明図。
【図11】デジタル電力増幅器での電力増幅時に電力損失が発生する理由を示した説明図。
【図12】COMの電圧傾きが小さい場合の、平滑フィルターのコイルに流れる電流波形の例を示した説明図。
【図13】抵抗性負荷のアクチュエーターに一定電圧のCOMを連続的に出力した場合の、平滑フィルターのコイルに流れる電流の様子を示した説明図。
【図14】第1実施例の液体噴射装置の構成の一部を示した説明図。
【図15】第1実施例の液体噴射装置のデジタル電力増幅器において、電力損失の増加を回避可能な理由を示した説明図。
【図16】第1実施例で駆動波形信号情報にフラグが設定された態様を示した説明図。
【図17】DC判別信号設定処理を示した説明図。
【図18】電圧レベル判別信号設定処理を示した説明図。
【図19】電圧レベル判別信号設定処理を示した説明図。
【図20】キャリア周波数変更手段の構成例を示した説明図。
【図21】第1実施例で駆動波形信号情報にフラグが設定されたその他の態様を示した説明図。
【図22】第1実施例の変形例の液体噴射装置の一部を示した説明図。
【図23】第1実施例の変形例における、キャリア周波数設定信号書込み処理を示した説明図。
【図24】第1実施例の変形例2の液体噴射装置の一部を示した説明図。
【図25】第2実施例において、デジタル電力増幅器における電力損失の増加を回避可能な理由を示した説明図。
【図26】第2実施例における4bitのflagと、選択されるキャリア周波数との関係を示したテーブルの例を示した説明図。
【図27】第2実施例における電圧レベル判別手段が、電圧レベル判別信号を設定する電圧レベル判別信号設定処理の一例を示した説明図。
【図28】第2実施例におけるDC判別信号および電圧レベル判別信号と、キャリア周波数設定信号との対応関係を示したテーブルの説明図。
【図29】第2実施例のキャリア周波数変更手段における、キャリア周波数切り換え処理の例を示した説明図。
【図30】第1実施例と比較して、第2実施例では、COMに重畳するキャリアリップルを抑制しながら、デジタル電力増幅器での電力損失の増加を回避することが可能である様子を示した説明図。
【図31】第2実施例の変形例の液体噴射装置の一部を示した説明図。
【図32】第2実施例の変形例における、キャリア周波数切り換え処理の例を示した説明図。
【図33】第2実施例の変形例において、デジタル電力増幅器での電力損失の増加を回避可能な理由を示した説明図。
【図34】第1実施例、第2実施例およびそれぞれの変形例で説明した液体噴射装置を、インクジェットプリンターとして適用した場合の、噴射ヘッドの内部構造を示した説明図。
【図35】インクジェットプリンターのアクチュエーターであるピエゾ素子に印加する駆動信号の基となる駆動波形信号の例を示した説明図。
【発明を実施するための形態】
【0021】
以下では、上述した本願発明の内容を明確にするために、次のような順序に従って実施例を説明する。
A.第1実施例:
A−1.医療用液体噴射装置構成:
A−2.アクチュエーター駆動回路の回路構成:
A−3.デジタル電力増幅器で電力損失が発生するメカニズム:
A−4.デジタル電力増幅器での電力損失を回避するメカニズム:
A−5.第1実施例での電力損失の増加の回避方法:
A−6.第1実施例の変形例:
A−7.第1実施例の変形例2:
B.第2実施例:
B−1.第2実施例での電力損失の増加の回避方法:
B−2.第2実施例の変形例:
C.第3実施例:
C−1.液体噴射型印刷装置(インクジェットプリンター)構成:
C−2.第3実施例での電力損失の増加の回避方法:
【0022】
A.第1実施例:
A−1.医療用液体噴射装置構成:
図1は、第1実施例の液体噴射装置の構成を示した説明図である。図示されているように液体噴射装置100は、大きく分けると、液体を噴射するための脈動発生部110と、脈動発生部110に向けて流体を供給する流体供給手段120と、脈動発生部110および流体供給手段120の動作を制御する制御部130などから構成されている。液体噴射装置100は、パルス状の液体を脈動発生部110から噴射することによって、生体組織を切除又は切開することに使用する手術具としてのウォータージェットメスの一例である。
【0023】
脈動発生部110は、金属製の第2ケース113に、同じく金属製の第1ケース114を重ねた構造となっており、第2ケース113の前面には円管形状の流体噴射管112が立設され、流体噴射管112の先端にはノズル111が挿着されている。第2ケース113と第1ケース114との合わせ面には、薄い円板形状の流体室115が形成されており、流体室115は、流体噴射管112を介してノズル111に接続されている。また、第1ケース114の内部には、アクチュエーター116が設けられている。脈動発生部110と制御部130とは配線ケーブル150によって接続されており、制御部130内のアクチュエーター駆動回路200からは、配線ケーブル150を介して駆動信号がアクチュエーター116に供給される。また、配線ケーブル150はコネクターによって脈動発生部110に取り付けられている。このため、配線ケーブル150は、長さや特性の異なる種々の配線ケーブル150に取り替えることが可能となっている。
【0024】
流体供給手段120は、噴射しようとする液体(水、生理食塩水、薬液など)が収容された流体容器123から、第1接続チューブ121を介して液体を吸い上げた後、第2接続チューブ122を介して脈動発生部110の流体室115内に供給する。このため、流体室115は液体で満たされた状態となっている。
【0025】
そして、制御部130から駆動信号をアクチュエーター116に印加すると、駆動されたアクチュエーター116によって流体室115内に圧力変化が生じ、その結果、流体室115内に充満していた液体が、ノズル111からパルス状に噴射される。
【0026】
尚、液体噴射装置100のノズル111から液体を噴射する方式としては、静電方式、ピエゾ方式、膜沸騰方式などが挙げられる。静電方式は、アクチュエーターである静電ギャップに駆動信号を与えると、流体室115内に圧力変化を生じ、その圧力変化によってノズル111から液体が噴射されるというものである。ピエゾ方式は、アクチュエーターであるピエゾ素子に駆動信号を与えると、流体室115内に圧力変化を生じ、その圧力変化によってノズル111から液体が噴射されるというものである。膜沸騰方式は、第1ケース114の内部に微小ヒーターがあり、微小ヒーターによって瞬間的に加熱された液体が膜沸騰状態となって気泡が発生し、その圧力変化によってノズル111から液体が噴射されるというものである。膜沸騰方式の場合は、微小ヒーターに駆動信号を印加して流体室115内の圧力を制御するので、本実施例では膜沸騰方式に用いる微小ヒーターもアクチュエーターの一種として考える。尚、前述したピエゾ素子は容量成分を有する容量性負荷である。また前述した微小ヒーターは、一例として、抵抗成分を有する抵抗性負荷などが挙げられる。
【0027】
本発明は、何れの液体噴射方法も適用可能であるが、駆動信号の波高値や電圧増減傾きを調整することで、上述した生体組織の切除又は切開の程度等を制御可能なピエゾ素子に特に好適である。従って、以後は主に、アクチュエーター116にピエゾ素子を用いた場合を例に説明を行う。
【0028】
アクチュエーター116にピエゾ素子を用いた場合、アクチュエーター116の伸張量は、駆動信号として印加される電圧に依存する。従って、所望の特性の液体を噴射するためには、精度の良い駆動信号をアクチュエーター116に印加する必要がある。そこで、このような駆動信号を生成するために、制御部130内には、以下に説明するようなアクチュエーター駆動回路200が搭載されている。
【0029】
A−2.アクチュエーター駆動回路の回路構成:
図2は、第1実施例の液体噴射装置100に搭載されたアクチュエーター駆動回路200の回路構成を示した説明図である。具体的には制御部130に搭載されたアクチュエーター駆動回路200の回路構成を示した説明図である。図示されているようにアクチュエーター駆動回路200は、駆動信号の基準となる駆動波形信号(以下、WCOM)を出力する駆動波形信号発生回路210と、駆動波形信号発生回路210から受け取ったWCOMをパルス変調して変調信号(以下、MCOM)に変換し、かつ後述するキャリア周波数設定信号(flag)によって、パルス変調する際のキャリア周波数を変更可能な変調回路220と、変調回路220からのMCOMをデジタル的に電力増幅して電力増幅変調信号(以下、ACOM)を生成するデジタル電力増幅器230と、デジタル電力増幅器230からACOMを受け取って変調成分を取り除いた後、駆動信号(以下、COM)として脈動発生部110のアクチュエーター116に供給する平滑フィルター240とを備えている。
【0030】
駆動波形信号発生回路210は、WCOMのデータを記憶した波形メモリーや、D/A変換器を備えており、波形メモリーから読み出したデータをD/A変換器でアナログ信号に変換することで、WCOMを生成する。また、変調回路220を、信号処理回路を用いてデジタル回路で構成することで、駆動波形信号発生回路210の波形メモリーから読み出したWCOMをデジタルデータのまま取り扱うようにしてもよい。
【0031】
変調回路220は、キャリア周波数fcの三角波を出力する三角波発生回路280と、駆動波形信号発生回路210から出力されたWCOMと三角波とを比較することによって、パルス波状の変調信号MCOMを生成(パルス変調)する比較器290を有している。三角波発生回路280は、WCOMがアナログ信号である場合は、オペアンプなどを用いた発振器で構成することができる。また三角波発生回路280は、WCOMがデジタル信号である場合は、マイコンやFPGAなどの制御器で構成することができる。
【0032】
また詳細は後述するが、第1実施例の変調回路220は、駆動波形信号発生回路210からのWCOMを基に、WCOMの一定電圧(直流)部分を判別して、DC判別信号(DS1)を出力するDC判別手段250と、駆動波形信号発生回路210からのWCOMを基に、WCOMの電圧値を判別して、電圧レベル判別信号(DS2)を出力する電圧レベル判別手段260と、DC判別信号と電圧レベル判別信号を基に、キャリア周波数を設定するキャリア周波数設定信号(flag)を三角波発生回路280に出力するキャリア周波数変更手段270を有している。ただし、電圧レベル判別手段260は、WCOMを基に、WCOMの電圧値に応じたパルス変調信号のデューティー比を判別して、前述したDS2を出力してもよい。以上のような構成により、第1実施例の変調回路220は、上述したキャリア周波数設定信号(flag)に基づいてキャリア周波数を変更することが可能となっている。
【0033】
尚、WCOMの電圧値とデューティー比Dとは一対一の関係にある。便宜上、以後パルス変調信号(MCOM)のデューティー比Dが1となる駆動波形信号(WCOM)の電圧値をVmaxとする。その場合、デューティー比Dに対応するWCOMの電圧値はD・Vmaxとなる。従って、前述したように、電圧レベル判別手段260は取得したWCOMの情報を基に、デューティー比の範囲を判別してDS2を出力してもよいし、WCOMの電圧値を判別してDS2を出力しても構わない。
【0034】
便宜上、以後の説明において、デューティー比D、又はWCOMの電圧値のどちらか一方の条件に注目して、課題の要因や解決策について説明する場合がある。ただし、これらは一対一の関係にある為、実際にはデューティー比D又はWCOMの電圧値のどちらの条件に注目した場合にも、同様の説明が成り立つ。従って、以後は特別に断ることなく、デューティー比D又はWCOMの電圧値のどちらか一方の条件に注目して説明を行う際には、もう一方の条件に注目しても同様の説明が成り立つことを前提に説明を行う。また駆動波形信号(WCOM)は駆動信号(COM)の基となる信号であるから、デューティー比DとCOMとも一対一の関係にある。後述するデジタル電力増幅器230の電源電圧をVddとした場合、デューティー比Dに対応するCOMの電圧値はD・Vddとなる。従って、以後は特別に断ることなく、デューティー比D又はWCOMの電圧値のどちらか一方の条件に注目して説明を行う際には、駆動信号(COM)の条件に注目しても同様の説明が成り立つことを前提に説明を行う。
【0035】
尚、本実施例では、DC判別手段250、電圧レベル判別手段260、およびキャリア周波数変更手段270は、変調回路220の内部に設ける構成としているが、変調回路220の外部に設ける構成としても構わない。その場合、変調回路220は、外部から来るキャリア周波数設定信号(flag)に基づいてキャリア周波数を変更することが可能となる。
【0036】
変調回路220によって得られたMCOMは、デジタル電力増幅器230に入力される。デジタル電力増幅器230は、プッシュ・プル接続された2つのスイッチ素子(MOSFETやIGBTなど)と、電源(出力電圧をVddとする)と、これらスイッチ素子を駆動するドライバーとを備えている。尚、MOSFETを駆動するドライバーはゲートドライバーと呼ぶ。MCOMの出力がハイの状態の場合は、ハイ側のスイッチ素子がONになり、ロー側のスイッチ素子がOFFになって、電源の電圧VddがACOMとして出力される。以後、この状態を「出力Hの状態」と称する。また、MCOMの出力がローの状態の場合は、ハイ側のスイッチ素子がOFFになり、ロー側のスイッチ素子がONになってグランドの電圧がACOMとして出力される。以後、この状態を「出力Lの状態」と称する。その結果、変調回路220の動作電圧とグランドとの間でパルス波状に変化するMCOMが、電源の電圧Vddとグランドとの間でパルス波状に変化するACOMに電力増幅される。この増幅では、プッシュ・プル接続された2つのスイッチ素子のON/OFFを切り換えているだけなので、アナログ波形を増幅する場合に比べれば、電力損失を抑制することが可能である。
【0037】
また、2つのスイッチ素子が共にONになると、電源Vddからグランドに向かって大きな突入電流が流れて素子に損傷を与える。そこで、こうしたことを回避するために、「出力Lの状態」と「出力Hの状態」との状態を切り換える際には、2つのスイッチ素子が何れもOFFとなる期間(デッドタイム期間)を経由して切り換えるようになっている。
【0038】
こうして電力増幅されたACOMは、LC回路によって構成される平滑フィルター240を通すことによってCOM(駆動信号)に変換され、アクチュエーター116に印加される。
【0039】
A−3.デジタル電力増幅器で電力損失が発生するメカニズム:
上述したように、デジタル電力増幅器230は、大きな電力損失を伴うことなくMCOMを電力増幅することが可能である。しかしある条件が成立すると、電力増幅時にデジタル電力増幅器230で大きな電力損失が発生することがある。
【0040】
図3は、一定電圧のCOMを連続的に出力する場合に、デジタル電力増幅器230における電力損失が、デューティー比に応じて増加する様子を示した説明図である。具体的にはデジタル電力増幅器230で電力損失が発生する様子を示した説明図である。図3に示すように、アクチュエーターに対して一定電圧のCOMを連続的に出力する状態において、変調信号のデューティー比がある値Xaより低くなるか、又はある値Xbより高くなると、電力損失が急激に増加する。ただし、Xa<Xbとする。尚、前述したように、WCOMの電圧値とデューティー比Dとは一対一の関係にある為、上述した条件は以下のように言い換えることができる。すなわち、アクチュエーターに対して一定電圧のCOMを連続的に出力する状態において、WCOMの電圧値がある値Xa・Vmaxより低くなるか、又はある値Xb・Vmaxより高くなると、電力損失が急激に増加する。また、前述したように、COMの電圧値とデューティー比Dとは一対一の関係にある為、上述した条件は以下のように言い換えることができる。すなわち、アクチュエーターに対して一定電圧のCOMを連続的に出力する状態において、COMの電圧値がある値Xa・Vddより低くなるか、又はある値Xb・Vddより高くなると、電力損失が急激に増加する。このような現象が生じると、WCOMをMCOMにパルス変調してから増幅したことによる省電力効果が非常に低くなるので、対策が必要となる。そのために、このような現象が生じるメカニズムを明らかにしなければならない。尚、上述したXa・Vmaxは本発明における「第一の電圧値」に相当し、また上述したXb・Vmaxは本発明における「第二の電圧値」に相当する。
【0041】
図3に示すように、本実施例では便宜上、デューティー比がYa〜Ybの範囲で、すなわち電圧値がYa・Vmax〜Yb・Vmaxの範囲で前記駆動波形信号(WCOM)を出力するものとする。ただし0<Ya<Yb<1とする。
【0042】
図4は、デジタル電力増幅器230の詳細な構成を示した回路図である。具体的には前述したデジタル電力増幅器230の内部構成を示した回路図である。図4では、スイッチ素子にMOSFETを用いた場合の回路図を示している。図4に示すように、MOSFETにはCds(ドレイン端子とソース端子との間に生じた寄生容量)、Cgd(ゲート端子とドレイン端子との間に生じた寄生容量)、およびCgs(ゲート端子とソース端子との間の寄生容量)の三つの寄生容量が存在する。尚、以後、ハイ側のMOSFETを「MOS(H)」と称し、ロー側のMOSFETを「MOS(L)」と称する。また、デジタル電力増幅器230のACOMが出力される端子を「Vs」と称する。本願の発明者らは、アクチュエーターに対して一定電圧を連続的に出力する場合には、これらの寄生容量が原因で前述した電力損失の増加が発生していることを見いだした。
【0043】
便宜上、以後はCdsに充放電される電荷を例に、上述した電力損失が発生する要因について説明を行う。ただし、CgdおよびCgsに関しても、後述するCdsの充放電の説明と同様のことが言える。以後、本実施例ではCdsのことを単に「寄生容量」と称するものとする。また、本実施例では、デジタル電力増幅器230のスイッチ素子にMOSFETを用いた場合を例に説明を行うが、スイッチ素子にIGBTなどを用いた場合や、スイッチ素子に並列に還流ダイオードを取り付けた場合なども、同様の説明が成り立つ。
【0044】
図5は、一定電圧のCOMを出力した場合に、平滑フィルター240のコイルに流れる電流がほぼ直線的に変化する様子を示した説明図である。
上述した寄生容量による電力損失発生のメカニズムを明らかにする為に、図5(a)に示す平滑フィルター240のコイルに流れる電流i(t)について説明する。図5(b)に、パルス状のACOMを平滑フィルター240に入力した場合の電流i(t)の様子を示す。便宜上、i(t)の方向を、Vs端子側から平滑フィルター240のコンデンサー側に流れる向きをプラスとし、また平滑フィルター240のコンデンサー側からVs端子側に流れる向きをマイナスとして定義する。また、図5(b)に示すように、電流i(t)のプラス側の振幅値をI1、マイナス側の振幅値をI2と表記する。ここで、ACOMのパルス変調周期はT[s](=1/fc)で、ACOMの電圧がVddに保たれるパルスのオン期間をton[s]、ACOMの電圧がグランドに保たれるパルスのオフ期間をtoff[s]とする。またここでは、ACOMのパルスのデューティー比D=ton/T(パーセント表示の場合は100×ton/T)が一定である場合、すなわち平滑フィルター240の出力電圧Vout(=D×Vdd)が一定である場合について説明を行う。以下に、i(t)の式の導出を行う。
【0045】
前述したように、本実施例ではアクチュエーター116にピエゾ素子を用いた場合を例に説明を行う。尚、ピエゾ素子は容量性の負荷である。図5(a)に示すように、容量性負荷であるアクチュエーター116は、平滑フィルター240のコンデンサーCに対して並列に接続されている。よって、平滑フィルター240のコンデンサーとアクチュエーター116とを合成容量として考え、電流i(t)の式を導出する。また便宜上、ここでは上記合成容量を単純に平滑フィルター240のコンデンサーと称する。
【0046】
図6は、一定電圧のCOMを出力した場合に、平滑フィルター240のコイルに流れる電流がほぼ直線的に変化する理由を示した説明図である。具体的には平滑フィルター240のコイルに流れる電流i(t)の算出式を示す。図6(a)はton期間について示したものであり、図6(b)はtoff期間について示したものである。図6(a)において、平滑フィルター240を構成するコイルのインダクタンスをL、コンデンサーのキャパシタンスをC、コイルに流れる初期電流(電圧Vdd印加時に流れていた電流)をI0、コンデンサーの初期電圧(電圧Vddの印加時でのコンデンサーの端子間電圧)をE0とすると、(1)式の微分方程式が成立する。(1)式を解くと、ton期間の電流i(t)は(2)式のように求められる。ここで、ω0は平滑フィルター240の共振周波数(=1/√(LC))である。また時間tonと共振周波数ω0との積がゼロ近傍の場合は、cosω0tはほぼ1、sinω0tはほぼω0tとみなすことができる。すると、(2)式は(3)式で近似することができる。(3)式より、図5(b)に示したように、ton期間の電流i(t)は時間tの経過とともに直線的に増加することが分かる。
【0047】
また、図6(b)においては(4)式の微分方程式が成立する。(4)式を解くと、toff期間の電流i(t)は(5)式のように求められる。上述したように、sinω0tをω0tとみなして、cosω0tを1とみなすと、(5)式は(6)式で近似することができる。(6)式より、図5(b)に示したように、toff期間の電流i(t)は時間tの経過とともに直線的に減少することが分かる。
【0048】
ここで、アクチュエーター116がピエゾ素子(容量性負荷)の場合は、平滑フィルター240の出力電圧Vout(=D×E)が一定の状態であれば、一変調周期Tの間でコンデンサーに出入りする電荷量は等しい値となる。これは、i(t)がプラス側とマイナス側との双方向に流れる波形であり、またそれぞれの方向におけるi(t)の振幅値I1およびI2が等しいことを示している。従って図5(b)に示したように、i(t)の振幅値の大きさを|IA|(=|I1|=|I2|)とすると、i(t)はton期間ではマイナスIAからほぼ直線的に増加してプラスIAに転じる。また、toff期間ではプラスIAからほぼ直線的に減少してマイナスIAに転じる。次に、|IA|の式の導出を行う。
【0049】
図5に示したように、電圧Vddを印加した瞬間(t=0)では、電流I=−IAであるから、(3)式においてI0=−IAとなる。また初期電圧E0は、図5の電圧Vout(=D×Vdd)に等しい。更に、時間t=tonにおいては、(3)式においてI(ton)=IAとなる。これらを(3)式に代入して整理すると、コイルに流れる電流の振幅|IA|は、図7(a)に示した(7)式によって示される。
図7は、一定電圧のCOMを出力した場合に、平滑フィルター240のコイルに流れる電流の振幅が、デューティー比に応じて変化する様子を示した説明図である。ただし、図5で示した周期Tの逆数fc(キャリア周波数)とし、(3)式のtにton=D/fcを代入している。
【0050】
(7)式から、図7(b)に示すように、|IA|はデューティー比Dが0.5の時に最大値となり、Dが0.5から小さくなるにつれて、あるいは0.5から大きくなるにつれて小さくなるカーブ特性を持つ。アクチュエーターに対して一定電圧を連続的に出力する場合、このデューティー比に対する|IA|のカーブ特性が、上述した寄生容量によって電力損失が発生する要因に繋がっていることが見いだされた。より詳細には、|IA|が後述する閾値電流Ithを下回るようなデューティー比Dとなった場合に、上述した課題が発生することが見いだされた。以後、そのメカニズムについて説明する。尚、コイル電流の振幅|I1|および|I2|(容量性負荷の場合は|IA|)がIthと等しくなるデューティー比をXaおよびXbとする。ただし、Xa<Xbであるとする。また、前述したように、デューティー比XaおよびXbに対応するWCOMの電圧値は、それぞれXa・Vmax、Xb・Vmaxである。
【0051】
図8は、デジタル電力増幅器230の動作が切り換わる際のACOMの様子を示した説明図である。具体的にはデジタル電力増幅器230が「出力Lの状態」から「出力Hの状態」に切り換わる際と、「出力Hの状態」から「出力Lの状態」に切り換わる際のVs端子の電圧波形(ACOM)の様子を示す。ただし、図8(a)は、|IA|が後述するIthよりも大きく、前述した寄生容量による電力損失が発生しない場合の様子を示している。また図8(b)は、|IA|が後述するIthよりも小さく、前述した寄生容量による電力損失が発生する場合の様子を示している。
【0052】
先ず始めに、図8(a)の場合について説明する。
図9は、一定電圧のCOMを出力した場合に、平滑フィルター240のコイルに大きな電流が流れる条件では、電力増幅時の電力損失が低下する理由を示した説明図である。具体的には図8(a)の状態[A]から状態[C]のそれぞれの場合において、MOSFETに流れる電流の様子を示す。図9(a)に示すように、「出力Lの状態」で、かつ図中の破線の矢印で示されるようなマイナス側のコイル電流i(t)が流れている状態を、状態[A]と呼ぶ。状態[A]ではMOS(H)のドレイン端子が電圧Vddに接続され、MOS(H)のソース端子はグランドに接続されているので、MOS(H)の寄生容量には電荷が蓄えられている。またMOS(L)のドレイン端子およびソース端子は何れもグランドに接続されているので、MOS(L)の寄生容量には電荷が蓄積されていない。
【0053】
図9(b)に示すように、状態[A]からデッドタイム期間に移行すると、自己誘導現象によって、図9(a)で示したコイル電流をそのまま流し続けようとする方向に起電力(逆起電力)が発生する。この状態を状態[B]と呼ぶ。図9(b)に示した破線の矢印は、前述した逆起電力によって流れる電流を表している。状態[B]では二つのMOSFETが何れもOFFの状態である。従って、前述した逆起電力による電流は、図9(b)に示したスイッチ部には流れない。一方、前述した逆起電力によって、MOS(L)の寄生容量にはドレイン端子側からソース端子側に電流が流れるので、MOS(L)の寄生容量が充電される。また、前述した逆起電力によって、MOS(H)の寄生容量にもソース端子側からドレイン端子側に電流が流れ、MOS(H)の寄生容量に蓄えられていた電荷が電源Vddに回生される。その結果、状態[B]の間は、Vsの電圧がグランドからVddに向かって上昇していく。
【0054】
ここで、|I2|(=|IA|)が大きい程、前述した逆起電力は大きくなり、状態[B]のデッドタイム期間中にVsの電圧が上昇する速度、すなわち電圧の傾きが大きくなる。図8(a)に示したように、状態[B]のデッドタイム期間の終了時に、Vsの電圧が調度Vddまで達する場合のコイル電流の振幅値(|I2|)を、閾値電流Ithと称する。前述したように、ここでは|I2|(=|IA|)がIthよりも大きい場合について説明している。この場合は、図8(a)に示したように、デッドタイム期間の終了時に、前述した逆起電力によってVsの電圧がVddまで達する。この場合、デッドタイム期間内にMOS(H)の寄生容量に蓄えられていた電荷は全て回生され、またMOS(L)の寄生容量への充電が完了する。
【0055】
デッドタイム期間の終了後に、「出力Hの状態」で、かつマイナス側のコイル電流i(t)が流れている状態を、状態[C]と呼ぶ。図9(c)に示すように、MOS(H)の寄生容量に蓄えられていた電荷が全て回生され、またMOS(L)の寄生容量への充電が完了した状態でMOS(H)がON状態になり、状態[C]に移行する。このような場合は、MOS(H)がON状態になっても、寄生容量に対して電荷の充放電は起こらない。よって、MOS(H)のオン抵抗には寄生容量が要因となる電流は流れないので、「出力Lの状態」から「出力Hの状態」に切り換える際に、MOSFETの寄生容量による損失は起こらない。
【0056】
図10は、一定電圧のCOMを出力した場合に、平滑フィルター240のコイルに大きな電流が流れる条件では、電力増幅時の電力損失が低下する理由を示した説明図である。具体的には図8(a)の状態[D]から状態[F]のそれぞれの場合において、MOSFETに流れる電流の様子を示す。図8(a)に示したように、状態[C]から時間が経つと、「出力Hの状態」で、かつ図10(a)中の破線の矢印で示されるようなプラス方向の電流が流れるようになる。この状態を、状態[D]と呼ぶ。図10(a)に示すように、状態[D]ではMOS(L)のドレイン端子が電圧Vddに接続され、MOS(L)のソース端子はグランドに接続されているので、MOS(L)の寄生容量には電荷が蓄えられている。またMOS(H)のドレイン端子およびソース端子は何れも電源Vddに接続されているので、MOS(H)の寄生容量には電荷が蓄積されていない。
【0057】
図10(b)に示すように、状態[D]からデッドタイム期間に移行すると、前述した自己誘導現象によって、図10(a)で示したコイル電流をそのまま流し続けようとする方向に起電力(逆起電力)が発生する。この状態を状態[E]と呼ぶ。図10(b)に示した破線の矢印は、前述した逆起電力によって流れる電流を表している。状態[E]では、前述した逆起電力によって、MOS(H)の寄生容量にはドレイン端子側からソース端子側に電流が流れるので、MOS(H)の寄生容量が充電される。また、MOS(L)の寄生容量にもソース端子側からドレイン端子側に電流が流れるので、MOS(L)の寄生容量に蓄えられていた電荷が、平滑フィルター240のコンデンサー側に移動し、平滑フィルター240のコンデンサーを充電する。その結果、状態[E]の間は、Vsの電圧がVddからグランドに向かって下降していく。
【0058】
ここで、|I1|(=|IA|)が大きい程、前述した逆起電力は大きくなり、状態[E]のデッドタイム期間中にVsの電圧が下降する速度、すなわち電圧の(負の)傾きが大きくなる。図8(a)に示したように、状態[E]のデッドタイム期間の終了時に、Vsの電圧が調度グランドまで達する場合のコイル電流の振幅値(|I1|)は、前述した閾値電流Ithとなる。前述したように、ここでは|I1|(=|IA|)がIthよりも大きい場合について説明している。この場合は、図8(a)に示したように、デッドタイム期間の終了時に、前述した逆起電力によってVsの電圧がグランドまで達する。この場合、デッドタイム期間内にMOS(L)の寄生容量に蓄えられていた電荷は全て平滑フィルター240のコンデンサー側に移動し、またMOS(H)の寄生容量への充電が完了する。
【0059】
デッドタイム期間の終了後に、「出力Lの状態」で、かつプラス側のコイル電流i(t)が流れている状態を、状態[F]と呼ぶ。図10(c)に示すように、MOS(L)の寄生容量に蓄えられていた電荷が全て平滑フィルター240のコンデンサー側に移動し、またMOS(H)の寄生容量への充電が完了した状態でMOS(L)がON状態になり、状態[F]に移行する。このような場合は、MOS(L)がON状態になっても、寄生容量に対して電荷の充放電は起こらない。よって、MOS(L)のオン抵抗には寄生容量が要因となる電流は流れないので、「出力Hの状態」から「出力Lの状態」に切り換える際に、MOSFETの寄生容量による損失は起こらない。尚、状態[F]の次は、前述した状態[A]に戻ることになる。
【0060】
以上が、|IA|(=|I1|=|I2|)がIthよりも大きく、前述した寄生容量による電力損失が発生しない図8(a)の場合についての説明である。次に、前述した寄生容量による電力損失が発生する図8(b)の場合について、図8(a)の場合との相違点を中心に説明する。
【0061】
前述したように、図8(b)では|I2|(=|IA|)がIthよりも小さい場合について説明している。この場合は、「出力Lの状態」から「出力Hの状態」に移行する際のデッドタイム期間内(図8(b)の状態[B])に、Vsの電圧がVddまで達しない。すると、前述したMOS(H)の寄生容量に蓄えられていた電荷の回生と、MOS(L)の寄生容量への充電は、デッドタイム期間内に完了しない。そのような状態でMOS(H)がON状態となると、状態[B]から、図8(a)の場合にはなかった状態[I]に移行する。
【0062】
図11は、デジタル電力増幅器230での電力増幅時に電力損失が発生する理由を示した説明図である。図11(a)に、図8(b)の状態[I]においてMOSFETに流れる電流の様子を示す。状態[I]では、MOS(H)がONの状態となる為、MOS(H)のドレイン端子とソース端子とは短絡状態となる。その結果、MOS(H)の寄生容量において、回生されずに残っていた電荷が、図11(a)の一点鎖線の矢印で示す電流として、MOS(H)のスイッチ部を介して流れる。またMOS(L)のドレイン端子は電圧Vddになり、ソース端子はグランドの電位に保たれている。その結果、図11(a)の二点鎖線の矢印で示す電流がMOS(H)のスイッチ部を介して流れ、MOS(L)の寄生容量が充電される。よって、MOS(H)のオン抵抗に上述した一点鎖線と二点鎖線との電流が流れる為に、状態[I]ではMOS(H)において損失が発生する。
【0063】
次に、「出力Hの状態」から「出力Lの状態」に移行する際のデッドタイム期間内(図8(b)の状態[E])について説明する。前述したように、図8(b)では|I1|(=|IA|)がIthよりも小さい場合について説明している。この場合は、状態[E]のデッドタイム期間内に、Vsの電圧がグランドまで達しない。すると、前述したMOS(L)の寄生容量に蓄えられていた電荷の平滑フィルター240のコンデンサー側への移動と、MOS(H)の寄生容量への充電は、デッドタイム期間内に完了しない。そのような状態でMOS(L)がON状態となると、状態[E]から、図8(a)にはなかった状態[J]に移行する。
【0064】
図11(b)に、図8(b)の状態[J]においてMOSFETに流れる電流の様子を示す。状態[J]では、MOS(L)がON状態となる為、MOS(L)のドレイン端子とソース端子とは短絡状態となる。その結果、MOS(L)の寄生容量において、平滑フィルター240のコンデンサー側へ移動されずに残っていた電荷が、図11(b)の一点鎖線の矢印で示す電流として、MOS(L)のスイッチ部を介して流れる。またMOS(H)のドレイン端子は電圧Vddになり、ソース端子はグランドの電位となる。その結果、図11(b)の二点鎖線の矢印で示す電流がMOS(L)のスイッチ部を介して流れ、MOS(H)の寄生容量が充電される。よって、MOS(L)のオン抵抗に上述した一点鎖線と二点鎖線との電流が流れる為に、状態[J]ではMOS(L)において損失が発生する。
【0065】
図7に示したように、アクチュエーターに対して一定電圧を連続的に出力する場合は、デューティー比が0.5より小さくなるにつれて、あるいは0.5より大きくなるにつれて、コイルの電流の振幅|IA|(=|I1|=|I2|)は小さくなる。よって、デューティー比が0.5より小さくなる程、又は大きくなる程、|IA|が閾値電流Ithを下回るような条件となり得る。その結果、上述した状態[I]や状態[J]が発生し、前述した寄生容量による損失が発生してしまう。また、アクチュエーターに対して一定電圧を連続的に出力する状態にある為、上述した状態[I]および状態[J]が、パルス変調のキャリア周波数fcに対応する高い頻度で発生する為に、非常に大きな電力損失が発生することになる。以上のことより、このような寄生容量による電力損失を回避するためには、状態[I]および状態[J]が発生しないようにすればよい。
【0066】
A−4.デジタル電力増幅器での電力損失を回避するメカニズム:
前述したように、状態[I]を発生させない為には、状態[B]におけるデッドタイム期間内に、Vsの電圧が電圧Vdd以上に上昇すればよい。すなわち、コイル電流の振幅の大きさ|I2|(容量性負荷の場合は|I2|=|IA|)が、前述したIth以上になるようにすればよい。
【0067】
また前述したように、状態[J]を発生させない為には、状態[E]におけるデッドタイム期間内に、Vsの電圧がグランド以下に下降すればよい。すなわち、コイル電流の振幅の大きさ|I1|(容量性負荷の場合は|I1|=|IA|)が、前述したIth以上になるようにすればよい。
【0068】
ここで、上述した状態[I]や状態[J]が発生しないように、|I1|(=|IA|)≧Ithおよび、|I2||(=|IA|)≧Ithの条件を満たす方法として、寄生容量の容量値、デッドタイム期間の長さ、平滑フィルター240のコイルのインダクタンス値、キャリア周波数のいずれかの値を変更することが挙げられる。上述したパラメーターの中では、キャリア周波数を変更することが比較的容易である。アクチュエーターに対して一定電圧を連続的に出力する状態で、デューティー比DがD<Xa又はD>Xbとなる場合には、(7)式に示す関係から、キャリア周波数を下げることで、|I1|(=|IA|)≧Ithおよび、|I2||(=|IA|)≧Ithの条件を満たすことが可能となる。前述したように、デューティー比DがD<Xa又はD>Xbとなる条件は、WCOMの電圧値Vに注目した場合には、VがV<Xa・Vmax又はV>Xb・Vmaxとなる条件として言い換えることが出来る。
【0069】
以上のことから、上述した状態[I]や状態[J]が発生しないように、すなわち|I1|(=|IA|)≧Ithおよび、|I2||(=|IA|)≧Ithの条件を満たすようにキャリア周波数fcを変更してやれば、アクチュエーターに対して一定電圧を連続的に出力する状態で、かつどのような駆動波形信号の電圧値(又はデューティー比、又は駆動信号の電圧値)の条件である場合にも、前述したデジタル電力増幅器230における電力損失の増加を回避することが可能となる。第1実施例の液体噴射装置100は、このような原理に基づいて、デジタル電力増幅器230での電力損失が増加しないように、パルス変調時のキャリア周波数fcを変更している。以下、第1実施例の液体噴射装置100で、アクチュエーター116に対して一定電圧を連続的に出力する状態で、駆動波形信号の電圧値VがV<Xa・Vmax又はV>Xb・Vmaxとなる場合(デューティー比DがD<Xa又はD>Xbとなる場合)に、電力損失の増加を回避する方法について具体的に説明する。
【0070】
以上では、アクチュエーターに対して一定電圧、すなわち傾きが0のCOMを連続的に出力する状態に関して説明を行ってきた。しかし、アクチュエーターに対して出力するCOMが完全な一定電圧でない場合、すなわち傾きが小さい場合でも、キャリア周波数を変更することで、前述した電力損失の増加を回避することが可能である。そこで、ここでは本発明における「一定電圧」に関する定義を行う。
【0071】
前述したように、アクチュエーターに対して一定電圧を連続的に出力した場合、平滑フィルター240のコイルに流れる電流i(t)は、以下のような特性を持つ。すなわち電流i(t)は、変調信号(MCOM)の一変調周期内で、プラスとマイナスとの双方向に流れる特性を持つ。電流i(t)がこのように流れる条件下にある場合は、キャリア周波数を下げることで、電流i(t)のプラス側の振幅の大きさ|I1|と、マイナス側の振幅値の大きさ|I2|の双方を大きくすることが出来る。従って|I1|および|I2|が前述したIthより小さい場合にも、キャリア周波数を下げることで、|I1|および|I2|の双方をIth以上とすることができ、前述した状態[I]および状態[J]の発生、すなわち前述したデジタル電力増幅器230における電力損失の増加を回避することができる。
【0072】
図12は、COMの電圧傾きが小さい場合の、平滑フィルター240のコイルに流れる電流波形の例を示した説明図である。具体的にはCOMの電圧傾きが小さい場合のコイル電流i(t)の波形例を示す。ピエゾ素子のような容量性負荷をアクチュエーター116に用いた場合、アクチュエーター116には、印加されるCOMに対して半周期だけ位相が進んだ電流Iが流れる。従って、図12に示すように、ピエゾ素子であるアクチュエーター116に対して傾きを持った電圧のCOMを駆動する場合、コイル電流i(t)は前述した電流Iに、変調回路220での変調周期に対応する三角波状の電流(図5(b)および、図6の(3)式、(6)式を参照)が重畳した波形となる。またアクチュエーター116に印加されるCOMの電圧傾きが大きいほど、前述した電流Iは大きくなる。
【0073】
図12に示すように、COMの電圧傾きが小さく、電流i(t)が一変調周期内で、プラスとマイナスとの双方向に流れる場合を考える。この場合は、前述した理由から、キャリア周波数を下げることで前述した状態[I]および状態[J]の発生、すなわち前述したデジタル電力増幅器230における電力損失の増加を回避することができる。以上のことより、本発明において、アクチュエーターに対して出力する「一定電圧」のCOMとは、以下の条件を満たすような「緩やかな傾きの電圧」のCOMまでを含むものとする。すなわち電流i(t)が、変調信号(MCOM)の一変調周期内で、プラスとマイナスとの双方向に流れていることを条件とする。
【0074】
尚、以上ではアクチュエーター116にピエゾ素子(容量性負荷)を用いた場合を例に説明を行ってきたが、前述したように、アクチュエーター116に微小ヒーターなどの抵抗性負荷を用いた場合にも、キャリア周波数を変更することで、前述したデジタル電力増幅器230における電力損失の増加を回避することができる。以下にその説明を行う。
図13は、抵抗性負荷のアクチュエーター116に一定電圧のCOMを連続的に出力した場合の、平滑フィルター240のコイルに流れる電流の様子を示した説明図である。具体的には抵抗性負荷のアクチュエーター116に一定電圧を連続的に出力した場合の、コイルに流れる電流i(t)’の波形例を示す。
【0075】
抵抗値Rの抵抗性負荷であるアクチュエーター116に一定電圧Eを連続的に出力した場合、アクチュエーター116には一定電流Ir=E/Rが流れる。従って図13に示すように、前述したコイルの電流i(t)’は、容量性負荷のアクチュエーター116の場合に説明したコイルの電流i(t)と、前述した一定電流Irとの和で表される。従って、電流i(t)’のプラス側の振幅値|I1|とマイナス側の振幅値|I2|とは、ピエゾ素子のような容量性負荷のアクチュエーター116に一定電圧を連続的に出力した場合と異なり、|I1|=|I2|(=|IA|)とならない。その点に注意した上で、上述した容量性負荷のアクチュエーター116の説明の場合と同様に、前述した電流i(t)’の振幅値|I1|と|I2|とが、それぞれ前述した閾値電流Ith以上となるようにキャリア周波数を変更する。以上のようにすることで、微小ヒーターなどの抵抗性負荷のアクチュエーター116に一定電圧を連続的に出力する状態で、駆動波形信号の電圧値(又はデューティー比、又は駆動信号の電圧値)がどのような条件にある場合にも、前述した電力損失の増加を回避することが可能となる。
【0076】
A−5.第1実施例での電力損失の増加の回避方法:
図14は、第1実施例の液体噴射装置100の構成の一部を示した説明図である。具体的には第1実施例の液体噴射装置100の構成の一部と、デジタル電力増幅器230での電力損失の増加を回避する方法の説明図を示す。図14(a)に示すように、第1実施例の駆動波形信号発生回路210は、WCOMのデジタルデータを記憶した波形メモリーと、波形メモリーに記憶されたWCOMのデータを読み出す駆動波形信号制御手段を有している。変調回路220にWCOMをデジタルデータとして入力する場合、駆動波形信号制御手段は、波形メモリーから読み出したWCOMのデジタルデータをそのまま出力する。また前述したように、変調回路220にWCOMをアナログデータとして入力する場合は、駆動波形信号制御手段にD/A変換器を備えておけばよい。本実施例では、駆動波形信号制御手段はWCOMをデジタルデータのまま出力するものとする。
【0077】
図14(a)に示すように、波形メモリーには、WCOMの出力を開始してからの経過時間tnと、そのときに出力するWCOMの電圧Vnとが記憶されている。尚、tnは経過時間ではなく、一つ前の時間tn−1からの差分データとして波形メモリーに登録してもよい。その場合は、tnを経過時間として登録する場合に比べて、波形メモリーの使用容量を低減できる可能性がある。同様に、WCOMの電圧Vnに関しても、一つ前の電圧Vn−1からの差分データとして波形メモリーに登録すれば、波形メモリーの使用容量を低減できる可能性がある。また駆動波形信号制御手段が、波形メモリーから一定の時間間隔Δt(サンプリング時間)で電圧データを読み出す場合には、前述した経過時間のデータは波形メモリーに記憶させる必要はない。
【0078】
前述したように、変調回路220は、キャリア周波数設定信号(flag)を三角波発生回路280に出力することで、flagに基づいてキャリア周波数を変更することが可能となっている。ここではflagを2ビットの信号とし、以下の3つのキャリア周波数に変更可能であるとする。1つ目は、WCOMの電圧VがXa・Vmax≦V≦Xb・Vmax(デューティー比DがXa≦D≦Xb)である場合に選択される基準キャリア周波数fc0とする。fc0は、アプリケーションに要求される種々の仕様から決定されるものである。2つ目は、アクチュエーターに対して一定電圧を連続的に出力している状態で、WCOMの電圧VがYa・Vmax≦V<Xa・Vmax(デューティー比DがYa≦D<Xa)の領域になる場合において、図8(b)に示した状態[I]および状態[J]の発生を回避可能な第一キャリア周波数fc1とする。ただし前述したように、fc1<fc0である。3つ目は、アクチュエーターに対して一定電圧を連続的に出力している状態で、WCOMの電圧VがXb・Vmax<V≦Yb・Vmax(デューティー比DがXb<D≦Yb)の領域になる場合において、図8(b)に示した状態[I]および状態[J]の発生を回避可能な第二キャリア周波数fc2とする。ただし前述したように、fc2<fc0である。
【0079】
図14(b)に示すように、flag=「00」を出力すると基準キャリア周波数fc0が選択され、flag=「01」を出力すると第一キャリア周波数fc1が選択され、またflag=「10」を出力すると第二キャリア周波数fc2が選択されるものとする。尚、変更可能なキャリア周波数の種類を増やす場合は、flagのビット数を増やすことで対応可能である。
【0080】
尚、以後は前述したfc0、fc1、fc2の3種類のキャリア周波数に変更可能な場合を例に説明を行うが、以下のようにすることで、fc1とfc2とは同じ周波数としても構わない。すなわち、アクチュエーターに対して一定電圧を連続的に出力している状態で、WCOMの電圧VがYa・Vmax≦V<Xa・Vmax又はXb・Vmax<V≦Yb・Vmax(デューティー比Dの場合はYa≦D<Xa又はXb<D≦Yb)のどちらの領域にある場合においても、図8(b)の状態[I]および状態[J]の発生を回避可能なキャリア周波数をfc1’とすれば、前述したfc1およびfc2は同じ周波数fc1’としても構わない。この場合は、flagを1ビットの信号とし、前述したfc0とfc1’との2種類のキャリア周波数に変更可能な構成とすればよい。
【0081】
また、ここではWCOMの電圧VがYa・Vmax≦V≦Yb・Vmaxの範囲で出力される液体噴射装置100の場合を例に説明を行っているが、以下のような場合も考えられる。例えば、WCOMの電圧VがYa・Vmax≦V≦Xb・Vmaxの範囲(Dの場合はYa≦D≦Xb)で出力されるような液体噴射装置100である場合や、種々の回路条件および負荷であるアクチュエーター116の電気的な特性などが要因で、V<Xa・Vmaxの範囲でのみ前述した電力損失の増加が発生するような場合が考えられる。この場合には、前述したfc0とfc1との2種類に変更可能な構成とし、アクチュエーターに対して一定電圧を連続的に出力している状態で、WCOMの電圧値VがV<Xa・Vmaxとなる場合のみ、キャリア周波数をfc1に変更するようにしてもよい。
【0082】
また、別の例として、WCOMの電圧値VがXa・Vmax≦V≦Yb・Vmaxの範囲(Dの場合はXa≦D≦Yb)で出力されるような液体噴射装置100である場合や、種々の回路条件および負荷であるアクチュエーター116の電気的な特性などが要因で、V>Xb・Vmaxの範囲でのみ前述した電力損失の増加が発生するような場合が考えられる。この場合には、前述したfc0とfc2との2種類に変更可能な構成とし、アクチュエーターに対して一定電圧を連続的に出力している状態で、WCOMの電圧値VがV>Xb・Vmaxとなる場合のみ、キャリア周波数をfc2に変更するようにしてもよい。
【0083】
図15は、第1実施例の液体噴射装置100のデジタル電力増幅器230において、電力損失の増加を回避可能な理由を示した説明図である。ただし、アクチュエーターに対して一定電圧を連続的に出力している場合の説明図である。図15(a)に示すように、WCOMの電圧値VがV<Xa・Vmaxの領域になる場合には、キャリア周波数をfc0からfc1に変更する。またVがV>Xb・Vmaxの領域になる場合には、キャリア周波数をfc0からfc2に変更する。その結果、図15(b)中に太い破線で示したように、WCOMの電圧値(又はデューティー比D、又はCOMの電圧値)がどのような条件にある場合にも、前述したデジタル電力増幅器230における電力損失を回避することが可能となる。
【0084】
次に、第1実施例の液体噴射装置100の変調回路220における、キャリア周波数の変更を判断および制御するDC判別手段250、電圧レベル判別手段260、キャリア周波数変更手段270について詳細に説明を行う。
【0085】
まず図16を用いて、DC判別手段250の説明を行う。
図16は、第1実施例で駆動波形信号(WCOM)にフラグが設定された態様を示した説明図である。図16中では、デジタルデータであるWCOMを白丸のプロットで表している。また、そのデジタルデータは時間間隔がΔtで出力されるものとする。図16では見易さの為、図中の白丸で示したデジタルデータのプロットを、実線で繋いで表示している。ここで、駆動波形信号(WCOM)は駆動信号(COM)の基となる信号であるから、アクチュエーター116に対して一定電圧のCOMを出力しているかを判別する場合、基となるWCOMの電圧波形の情報を得ることで判別することが可能である。以下は、DC判別手段250は、WCOMの情報を基にアクチュエーター116に対して一定電圧のCOMを出力しているかを判別する場合の例を示すが、COMの情報を基に判別する方法でも構わない。図16中に示した期間1および期間2のように、DC判別手段250は、WCOMが一定値(WCOMの傾きが0)の期間はDC判別信号(DS1)を「1」として出力し、またそれ以外の期間はDS1を「0」として出力する。
【0086】
図17は、DC判別信号設定処理を示した説明図である。具体的にはDC判別手段250がWCOMを基にDC判別信号(DS1)を設定するDC判別信号設定処理の一例を示す。ここで、図16で示したWCOMのデータにおいて、時間tnにおける電圧データをVnとする。また、ここではWCOMのデータがn=0からn=mまで用意されており、時間tmに到達すると、WCOMの1波形が終了となる。図17では、まずDC判別信号(DS1)の初期値として、DS1=0を設定する。その後、WCOMの電圧データの初期値として、n=−1の場合に相当する電圧データをV−1=0として設定しておく。
次に、DC判別手段250にWCOMの次のデータV0が転送されてくる。そして、V0と初期値V−1とのデータが等しいかを判別した後、等しい場合はV0のデータに対してDS=1を設定し、異なる場合はDS=0を設定する。その後、時間t0における電圧データV0を記憶する。そして、現在のデータがWCOMの波形終了点(n=m)かを判別し、n=mでなければ、WCOMの次の電圧データであるV1が転送されてくる。以後は、n=mとなるまで、上述したフローを繰り返す。また、n=mとなると、WCOMが連続出力される設定になっているかを判別する。連続出力の設定になっている場合は、再び図17に示すS101のステップに戻り、WCOMの最初のデータ(n=0)から上述したフローを繰り返す。連続出力の設定になっていない場合は、図17のフローを終了する。
【0087】
以上のようなフローにより、WCOMの1波形に渡ってDC判別信号(DS1)を設定することが可能となる。尚、図17のフローでは、WCOMのデータが連続で2点以上同じ電圧値であった場合には、DS=1となるように設定していた。ただし、図17のフローはDC判別信号(DS1)を設定する為の一例であり、例えばWCOMのデータが連続で10点以上同じ電圧値であった場合にはDS=1とする、などの処理でも構わない。
【0088】
次に、図16を用いて電圧レベル判別手段260の説明を行う。図16中に斜線を付して示した領域は、WCOMの電圧Vnが、Ya・Vmax≦Vn<Xa・Vmax又はXb・Vmax<Vn≦Yb・Vmaxとなる領域を示している。又は、WCOMの電圧Vnに対応するデューティー比Dnが、Ya≦Dn<Xa又はXb<Dn≦Ybとなる領域と言い換えることもできる。電圧レベル判別手段260は、図16中に示した期間3および期間5のように、WCOMの電圧値が図16中に示したYa・Vmax≦Vn<Xa・Vmaxの斜線領域に入る場合は、電圧レベル判別信号(DS2)を「01」として出力し、またXb・Vmax<Vn≦Yb・Vmaxの斜線領域に入る場合は、電圧レベル判別信号(DS2)を「10」として出力し、それ以外の場合はDS2を「00」として出力する。
【0089】
図18および図19は、電圧レベル判別信号設定処理を示した説明図である。具体的には電圧レベル判別手段260がWCOMを基に、電圧レベル判別信号(DS2)を設定する電圧レベル判別信号設定処理の一例を示す。ここで、図18はWCOMの電圧を基にDS2を設定する処理方法である。図18では、WCOMの情報を基にDS2を設定する場合の例を示すが、前述したように、COMの情報を基に判別する方法でも構わない。図18では、まずDS2の初期値としてDS2=00を設定する。そして時間t0におけるWCOMの電圧データV0が、上述した図16の斜線領域に入っているかを判断する。V0がYa・Vmax≦Vn<Xa・Vmaxの斜線領域に入っている場合にはV0のデータに対してDS2=01を設定し、V0がXb・Vmax<Vn≦Yb・Vmaxの斜線領域に入っている場合にはV0のデータに対してDS2=10を設定し、どちらの斜線領域にも入っていない場合にはDS2=00を設定する。その後、現在のデータがWCOMの波形終了点(n=m)かを判別する。ここではn=0であるので、WCOMの次のデータV1が転送されてくる。そうして、n=mとなるまで上述したフローを繰り返す。また、n=mとなると、WCOMが連続出力される設定になっているかを判別する。連続出力の設定になっている場合は、再び図18中に示すS201に戻り、WCOMの最初のデータ(n=0)から上述したフローを繰り返す。連続出力の設定になっていない場合は、図18のフローを終了する。以上のようなフローにより、WCOMの電圧データVnを基に、WCOMの1波形に渡って電圧レベル判別信号(DS2)を設定することが可能となる。
【0090】
次に、図19はWCOMから算出したデューティー比を基にDS2を設定する処理方法である。図19は図18に対して、S301に示すように、WCOMの電圧データVnからデューティー比Dn(Dn=Vn/Vmax)を算出するフローが追加されている。またS302およびS304において、S301で算出したDnが図16に示すYa≦Dn<Xa又はXb<Dn≦Ybの斜線領域に入っているかを判断する。後は図18に示すフローと同様である。以上のようなフローにより、WCOMの電圧Vnから算出したデューティー比を基に、WCOMの1波形に渡って電圧レベル判別信号(DS2)を設定することが可能となる。
【0091】
以上のようにして生成されたDC判別信号(DS1)および電圧レベル判別信号(DS2)は、図2および図14に示すキャリア周波数変更手段270に入力される。キャリア周波数変更手段270では、DS1が「1」かつDS2が「01」の場合に、キャリア周波数設定信号(flag)を「01」として出力する。またDS1が「1」かつDS2が「10」の場合に、flagを「10」として出力する。それ以外の場合は、flagを「00」として出力する。
図20は、キャリア周波数変更手段270の構成例を示した説明図である。図20(a)では、上述したDS1とDS2と、およびflagの対応関係が記憶されたテーブルによってflagを生成する。図20(b)では、DS1とDS2とを入力とした「AND」回路によってflagを生成する。図20(c)では、図示したflag設定処理を信号処理回路等で行うことで、flagを生成する。
【0092】
以上のようにして生成されたキャリア周波数設定信号(flag)を、変調回路220の三角波発生回路280に入力することで、WCOMに基づいて、前述したキャリア周波数fc0、fc1およびfc2の変更が実施される。その結果、図15(b)に示したように、アクチュエーターに対して一定電圧を連続的に出力する状態で、かつどのような駆動波形信号の電圧値(又はデューティー比、又は駆動信号の電圧値)の条件である場合にも、前述したデジタル電力増幅器230における電力損失の増加を回避することが可能となる。
【0093】
以上に説明した第1実施例の方法を用いることで、図16に示したWCOMに限らず、種々のWCOMに対して適切にキャリア周波数設定信号(flag)を設定することができる。
図21は、第1実施例で駆動波形信号情報にフラグが設定されたその他の態様を示した説明図である。たとえば、図21(a)に示すように、WCOMの途中に電圧が一定で、電圧VがXb・Vmax<V≦Yb・Vmax(デューティー比Dの場合はXb<D≦Yb)の斜線部に入る期間が存在している場合には、この期間のflagを「10」とし、キャリア周波数を第二キャリア周波数fc2に設定することができる。また、図21(b)に示すように、電圧が一定の期間が存在していても、WCOMの電圧値V(又はデューティー比D)が図中の斜線部に入らない場合には、この期間のflagを「00」とし、キャリア周波数を基準キャリア周波数fc0に設定することができる。このように、前述した第1実施例の方法によれば、種々のWCOMに対して適切にflagを設定して、キャリア周波数を切り換えることができる。その結果、前述したデジタル電力増幅器230での電力損失の増加を回避することが可能となる。
【0094】
A−6.第1実施例の変形例:
以上に説明した第1実施例では、キャリア周波数設定信号(flag)をリアルタイムで生成する場合を説明していた。ただし、キャリア周波数設定信号(flag)は予め用意するようにしてもよい。
【0095】
図22は、第1実施例の変形例の液体噴射装置の一部を示した説明図である。具体的には、キャリア周波数設定信号(flag)を予め用意するようにした場合の、アクチュエーター駆動回路200の構成の一部を示している。第1実施例の場合と異なり、ここでは前述したDC判別手段250、電圧レベル判別手段260、およびキャリア周波数変更手段270が、駆動波形信号発生回路210に含まれている場合を例に説明を行う。ただし、DC判別手段250、電圧レベル判別手段260、およびキャリア周波数変更手段270は、駆動波形信号発生回路210の外部に設ける構成としても構わない。また変調回路220は、第1実施例の場合と同様に、外部から来るflagに基づいてキャリア周波数を変更することが可能となっている。
【0096】
図22に示すように、駆動波形信号発生回路210中の波形メモリーには、新たにflagを記憶する為の領域が設けられている。ただし、波形メモリーのflagを記憶する為の領域には、キャリア周波数変更手段270から出力されるflagデータが書き込まれるものとする。駆動波形信号発生回路210中の駆動波形信号制御手段は、上述した波形メモリー中に記憶されたflagデータを、変調回路220の三角波発生回路280に対して出力する経路が新たに設けられている。また、駆動波形信号制御手段から変調回路220に出力する駆動波形信号(WCOM)に対して、DC判別手段250および電圧レベル判別手段260に出力する駆動波形信号をpreWCOMと称し、区別する。preWCOMは、WCOMと同じ駆動波形信号のデータであるが、WCOMよりも速い速度でデータを出力することが可能であるとする。
【0097】
図23は、第1実施例の変形例における、キャリア周波数設定信号書込み処理を示した説明図である。ここではまず、図23に示すようなキャリア周波数設定信号(flag)書込み処理を行い、駆動波形信号発生回路210中の波形メモリーに、WCOMの電圧データVnに対応するflagデータflnを、n=0〜mまで(すなわちWCOMの一波形分)記憶させる。尚、図23中のS500はflagの初期値として、flag=00を設定している。また、図23中のS502で取得するDS1は、図17に示すフローによって、DC判別手段250が出力するものである。同様に、図23中のS503で取得するDS2は、図18および図19に示すフローによって、電圧レベル判別手段260が出力するものである。図23中のS504は、図20で示した処理を実行することで、Vnに対するflag(fln)を生成する。ここで、波形メモリーに登録されているWCOMのデータが書き換えられない限り、図23に示すフローは一回実行しておくだけでよい。また、波形メモリーに複数のWCOMを記憶できる領域が設けられている場合には、それぞれのWCOMに対して図23のフローを一度ずつ実行しておけばよい。
【0098】
図23のフローを一度実行した後、駆動波形信号制御手段は、変調回路220の比較器290に対して、WCOMの電圧データVnを順次出力する。また同時に、変調回路220の三角波発生回路280に対して、図23のフローで予め記憶され、かつ電圧データVnに対応したflagデータ(fln)を順次出力する。このようにしても、前述したデジタル電力増幅器230での電力損失の増加を回避することが可能となる。また、ここでは駆動波形信号発生回路210中の波形メモリーにキャリア周波数設定信号(flag)を記憶する為の領域を設けていた。これに対し、flagを記憶する為のメモリーをキャリア周波数変更手段270に持たせておき、キャリア周波数変更手段270から直接変調回路220にflagを出力する構成としても構わない。
【0099】
A−7.第1実施例の変形例2:
図24は、第1実施例の変形例2の液体噴射装置の一部を示した説明図である。なお、図23に示したフローを人が実行し、その結果得られるflagデータを、波形メモリーに予め記憶させておくことでも対応できる。その場合は、図24に示すように、図22からDC判別手段250、電圧レベル判別手段260、およびキャリア周波数変更手段270を省いた構成で対応できる。このようにしても、前述したデジタル電力増幅器230での電力損失の増加を回避することが可能となる。
【0100】
B.第2実施例:
上述した第1実施例では、キャリア周波数fcを、基準キャリア周波数fc0と、第一キャリア周波数fc1と、第二キャリア周波数fc2の3種類に切り換えるものとしていた。すなわち、アクチュエーターに対して一定電圧を連続的に出力する状態で、WCOMの電圧値VがV<Xa・Vmax(デューティー比Dの場合はD<Xa)となる場合には、キャリア周波数をfc0からfc1に一気に引き下げるものとしていた。また、アクチュエーターに対して一定電圧を連続的に出力する状態で、COMの電圧値VがV>Xb(Dの場合はD>Xb)となる場合には、キャリア周波数をfc0からfc2に一気に引き下げるものとしていた。これに対して、より多くの種類のキャリア周波数fcを用意しておき、キャリア周波数fcを徐々に切り換えるようにしても良い。以下では、このような第2実施例について説明する。尚、第2実施例では図2で示した構成を用いて、前述した第1実施例に対して異なる部分についてのみ説明し、同様な部分については説明を省略する。
【0101】
B−1.第2実施例での電力損失の増加の回避方法:
前述した第1実施例と同様に、第2実施例においても、WCOMの電圧値はYa・Vmax〜Yb・Vmaxの範囲で用いるものとする。ただし、便宜上、本実施例では上述したデューティー比YaをY1aと表記し、またYbをY1bと表記する。
図25は、第2実施例において、デジタル電力増幅器230における電力損失の増加を回避可能な理由を示した説明図である。具体的には第2実施例でキャリア周波数を序所に切り替えた場合に、デジタル電力増幅器230での電力損失の増加を回避可能な理由を示した説明図である。図25(b)に示すように、第2実施例では、WCOMの電圧値がY1a・Vmax〜Xa・Vmaxの間に、Y2a・Vmax、Y3a・Vmax、Y4a・Vmaxといった複数の電圧値を設定する。但し、Y2a、Y3a、Y4aはデューティー比であり、Y1a<Y2a<Y3a<Y4a<Xaの関係にあるとする。図25(a)に示すように、WCOMの電圧値VがY1a・Vmax≦V<Y2a・Vmaxの間ではキャリア周波数をfc1a、Y2a・Vmax≦V<Y3a・Vmaxの間ではキャリア周波数をfc2a、Y3a・Vmax≦V<Y4a・Vmaxの間ではキャリア周波数をfc3a、Y4a・Vmax≦V<Xa・Vmaxの間ではキャリア周波数をfc4aといったように、多段階にキャリア周波数fcを切り換えていく。ここでは、WCOMの電圧値VがY1a・Vmax≦V<Xa・Vmaxの間において、fc1a〜fc4aまでの4種類のキャリア周波数に切換え可能な場合を例に説明を行う。ただし、fc1a<fc2a<fc3a<fc4a<fc0であるとする。
【0102】
次に、WCOMの電圧値がXb・Vmax〜Y1b・Vmaxの間についても同様に、たとえばY4b・Vmax、Y3b・Vmax、Y2b・Vmaxといった複数の電圧値を設定する。但し、Y4b、Y3b、Y2bはデューティー比であり、Xb<Y4b<Y3b<Y2b<Y1bの関係にあるとする。WCOMの電圧値VがXb・Vmax<V≦Y4b・Vmaxの間ではキャリア周波数をfc4b、Y4b・Vmax<V≦Y3b・Vmaxの間ではキャリア周波数をfc3b、Y3b・Vmax<V≦Y2b・Vmaxの間ではキャリア周波数をfc2b、Y2b・Vmax<V≦Y1b・Vmaxの間ではキャリア周波数をfc1bといったように、多段階にキャリア周波数fcを切り換えていく。ただし、fc1b<fc2b<fc3b<fc4b<fc0であるとする。また、WCOMの電圧値VがXa・Vmax≦V≦Xb・Vmaxの間では、キャリア周波数は第一実施例で述べた基準キャリア周波数fc0を選択する。
【0103】
図25(b)に示すように、上述したキャリア周波数fcnaは、WCOMの電圧値VがYna・Vmax≦V<Y(n+1)a・Vmaxの間において、前述したコイル電流の振幅|IA|が閾値電流Ithを下回らない周波数の上限値とする。ただし、nは1〜4の整数で、Y5aはXaと同じデューティー比であるとする。また同様に、上述したキャリア周波数fcnbは、WCOMの電圧値VがY(n+1)b・Vmax<V≦Ynb・Vmaxの間において、前述したコイル電流の振幅|IA|が閾値電流Ithを下回らない周波数の上限値とする。ただし、Y5bはXbと同じデューティー比であるとする。以上のように、各WCOMの電圧値(又はデューティー比)の期間におけるキャリア周波数fcnaおよびfcnbを求めておき、各WCOMの電圧値(又はデューティー比)の期間に応じてキャリア周波数を切り換えていけば、どのようなWCOMの電圧値(又はデューティー比、又はCOMの電圧値)の条件にある場合にも、|IA|がIthを下回らないようにすることができる。すなわち、前述した状態[I]や状態[J]の発生を回避し、前述したデジタル電力増幅器230での電力損失の増加を回避することが可能となる。
【0104】
前述したように、図2に示す変調回路220は、キャリア周波数設定信号(flag)を三角波発生回路280に出力することで、flagに基づいてキャリア周波数を変更することが可能となっている。第2実施例ではflagを4ビットの信号とし、前述した9つのキャリア周波数に変更可能であるとする。
図26は、第2実施例における4bitのflagと、選択されるキャリア周波数との関係を示したテーブルの例を示した説明図である。具体的には前述した4bitのflagと、選択されるキャリア周波数の関係を示したテーブルの例を示す。
【0105】
尚、以後は前述したfc0、fcna、fcnb(n=1〜4)の9種類のキャリア周波数に変更可能な場合を例に説明を行うが、以下のようにすることで、fcnaとfcnbとは同じ周波数としても構わない。すなわち、アクチュエーターに対して一定電圧を連続的に出力している状態で、WCOMの電圧値VがYna・Vmax≦V<Y(n+1)a・Vmax又はY(n+1)b・Vmax<V≦Ynb・Vmaxのどちらの領域にある場合においても、図8(b)の状態[I]および状態[J]の発生を回避可能なキャリア周波数をfcn’(ただし、nは1〜4の整数)とすれば、前述したfcnaおよびfcnbは同じ周波数fcn’としても構わない。この場合は、flagを3ビットの信号とし、前述したfc0とfcn’の5種類とのキャリア周波数に変更可能な構成とすればよい。
【0106】
図25に示したように、第2実施例ではWCOMの電圧値の範囲(又はデューティー比の範囲)を9つに分けた場合を例に説明している。従って第2実施例では、図2に示す電圧レベル判別手段260は、9つのWCOMの電圧値を区別可能なように、4bitの電圧レベル判別信号(DS2)を出力するものとする。前述したように、WCOMの電圧値とデューティー比Dとは一対一の対応関係にある。従って電圧レベル判別手段260は、WCOMの電圧値を判別してDS2を出力してもよいし、取得したWCOMの情報を基にデューティー比の範囲を判別してDS2を出力して構わない。
【0107】
図27は、第2実施例における電圧レベル判別手段260が、電圧レベル判別信号を設定する電圧レベル判別信号設定処理の一例を示した説明図である。具体的には第2実施例における電圧レベル判別手段260が、WCOMを基に電圧レベル判別信号(DS2)を設定する電圧レベル判別信号設定処理の一例を示す。図27は、WCOMの電圧値を基にDS2を設定する処理方法である。図27では、まずステップS600において、DS2の初期値としてDS2=0000を設定する。そしてステップS602〜S618において、時間t0におけるWCOMの電圧データV0が、上述した9つの電圧値範囲のいずれに該当するかを判断し、該当する電圧値範囲に応じて、図27に示すように4bitのDS2を設定する。その後、現在のデータがWCOMの波形終了点(n=m)かを判別する。ここではn=0であるので、WCOMの次のデータV1が転送されてくる。そうして、n=mとなるまで上述したフローを繰り返す。また、n=mとなると、WCOMが連続出力される設定になっているかを判別する。連続出力の設定になっている場合は、再び図27中に示すS601に戻り、WCOMの最初のデータ(n=0)から上述したフローを繰り返す。連続出力の設定になっていない場合は、図27のフローを終了する。以上のようなフローにより、WCOMの電圧データVnを基に、WCOMの1波形に渡って電圧レベル判別信号(DS2)を設定することが可能となる。
【0108】
また、WCOMから算出したデューティー比を基にDS2を設定する場合は、図27の設定処理を以下のように変更する。まず、図19に示したステップS301を、図27のステップS601の直後に挿入する。また図27におけるステップS602、S604、S606、S608、S610、S612、S614、S616の判断条件を、WCOMの電圧値に対応するデューティー比の条件(図25参照)に置き換える。以上の処理を行うことで、WCOMの電圧Vnから算出したデューティー比を基に、WCOMの1波形に渡って電圧レベル判別信号(DS2)を設定することが可能となる。尚、図2に示すDC判別手段250は、前述した第1実施例と同様に、図17のDC判別信号設定処理によってDC判別信号(DS1)を出力する。
【0109】
以上のようにして得られるDC判別信号(DS1)、および電圧レベル判別信号(DS2)を基に、図2に示すキャリア周波数変更手段270は4bitのキャリア周波数設定信号(flag)を出力する。
図28は、第2実施例におけるDC判別信号および電圧レベル判別信号と、キャリア周波数設定信号との対応関係を示したテーブルの説明図である。具体的にはDS1およびDS2と、flagとの対応関係を示したテーブルの例を示す。図29は、第2実施例のキャリア周波数変更手段270における、キャリア周波数切り換え処理の例を示した説明図である。第2実施例のキャリア周波数変更手段270は、図29に示すキャリア周波数切り換え処理のフローに従って、図28に示すテーブル関係を基にキャリア周波数設定信号(flag)を出力するものとする。
【0110】
ここで、図29に示すキャリア周波数切り換え処理について説明する。
図29において、まず4ビットのflagの初期値を0000に設定する。次に、一番目のWCOMの電圧データV0に対して、DC判別手段250で生成されたDS1の情報を取得する。また、V0に対して、電圧レベル判別手段260で生成されたDS2の情報も取得する。前述したように、DS1は図17に示すフローによって得られる。またDS2は、図18および図19に示すフローによって得られる。そしてステップS704において、図28に示すテーブル関係を基に、取得したDS1およびDS2の情報に対応するflagを設定する。
【0111】
図29に示したフローは、キャリア周波数を9種類の中から選択する場合の例であるが、さらに多くの種類のキャリア周波数を選択可能にする場合は、例えば図29のステップS704において参照するテーブルに、より多くの種類のflag情報を持たせておけばよい。ただし、DS2とflagのbit数は、選択可能とするキャリア周波数の種類の数に応じて変更する必要がある。従って、Y1a・Vmax〜Xa・Vmax、又はXb・Vmax〜Y1b・Vmaxの間を分割する電圧範囲の種類も、適宜設定することができる。
【0112】
以上のようにして生成されたキャリア周波数設定信号(flag)を、変調回路220の三角波発生回路280に入力することで、WCOMに基づいて、前述した9種類のキャリア周波数の変更が実施される。その結果、アクチュエーターに対して一定電圧を連続的に出力する状態で、かつどのような駆動波形信号の電圧値(又はデューティー比、又は駆動信号の電圧値)の条件である場合にも、前述したデジタル電力増幅器230における電力損失の増加を回避することが可能となる。
【0113】
尚、平滑フィルター240はローパスフィルターである為、キャリア周波数fcの値を引き下げるほど、平滑フィルター240におけるキャリア周波数成分の振幅減衰量は小さくなる。すなわち、COM(駆動信号)に重畳されるキャリアリップルの振幅が大きくなる。前述したように、第2実施例では、WCOMの電圧値がYa・Vmax≦V<Xa・Vmax又はXb・Vmax<V≦Yb・Vmaxの範囲において、キャリア周波数を段階的に引き下げている。
図30は、第1実施例と比較して、第2実施例では、COMに重畳するキャリアリップルを抑制しながら、デジタル電力増幅器230での電力損失の増加を回避することが可能である様子を示した説明図である。従って図30に示すように、第1実施例と比較して、COMに重畳するキャリアリップルを抑制しながら、前述したデジタル電力増幅器230での電力損失の増加を回避することが可能となる。
【0114】
B−2.第2実施例の変形例:
上述した第2実施例では、WCOMの電圧値(又はデューティー比)に応じてキャリア周波数fcを多段階に切り換えるものとして説明した。これに対して、WCOMの電圧値(又はデューティー比)に応じてキャリア周波数fcを連続的に切り換えるようにしても良い。
【0115】
ここでは便宜上、まずデューティー比に応じてキャリア周波数fcを連続的に切り換える場合について説明する。
図31は、第2実施例の変形例の液体噴射装置100の一部を示した説明図である。具体的にはデューティー比に応じてキャリア周波数fcを連続的に切り換える場合の、液体噴射装置100の一部の構成例を示す。図31に示した電圧レベル判別手段260は、図19の処理で生成されるDS2に加え、図19のステップS301で算出されるデューティー比Dnの情報についても、キャリア周波数変更手段270に対して出力する。図31に示すように、DS2およびDnの情報を一つの信号(DS2’)として、まとめてキャリア周波数変更手段270に出力してもよい。また、図31におけるDC判別手段250は、前述した第1実施例と同様に、図17のDC判別信号設定処理によってDC判別信号(DS1)を出力する。
【0116】
図32は、第2実施例の変形例における、キャリア周波数切り換え処理の例を示した説明図である。具体的にはデューティー比に応じてキャリア周波数fcを連続的に切り換えるために行われる、キャリア周波数切り換え処理のフローチャートである。図31に示すキャリア周波数変更手段270は、図32に示すフローに従って、キャリア周波数設定信号(flag)を出力する。ただし、図31に示すflagは、図32に示すフローに従って算出されるキャリア周波数そのものの値であるとする。もちろん、図31に示すflagはキャリア周波数の値に関連付けられたデータとして出力されても構わない。尚、図31における変調回路220は、キャリア周波数の値を示すflag情報を基に、キャリア周波数fcを設定および変更可能な構成となっている。
【0117】
次に、図32に示すキャリア周波数切り換え処理のフローチャートについて説明する。この処理は、駆動波形信号発生回路210がWCOMの出力を開始すると、キャリア周波数変更手段270によって実行される処理である。図32に示すキャリア周波数切り換え処理では、先ずステップS800において、キャリア周波数fcを前述した基準キャリア周波数fc0に設定しておく。そして、DC判別手段250において、WCOMの電圧データVnに対して生成されたDS1を取得する。また、電圧レベル判別手段260において、WCOMの電圧データVnに対して生成されたDS2と、Vnに対して算出されたデューティー比Dnを取得する。
【0118】
次に、取得したDS1、DS2、Dnの情報を基に、DS1=1かつDS2=01の場合は、デューティー比DがDn≦D<Xaの範囲で、コイル電流の振幅値|IA|≧Ithとなるキャリア周波数fcx1を算出し、算出した周波数fcx1をflagとして設定する。またDS1=1かつDS2=10の場合は、デューティー比DがXb<D≦Dnの範囲で、コイル電流の振幅値|IA|≧Ithとなるキャリア周波数fcx2を算出し、算出した周波数fcx2をflagとして設定する。また、それ以外の条件の場合は、flagを基準キャリア周波数fc0に設定する。続いて、図32の処理S802に戻り、次のWCOMの電圧データVn+1に対して上述した処理を繰り返す。また、n=mとなると、WCOMが連続出力される設定になっているかを判別する。連続出力の設定になっている場合は、再び図32中に示すS801に戻り、WCOMの最初のデータ(n=0)から上述したフローを繰り返す。連続出力の設定になっていない場合は、図32のフローを終了する。以上が、デューティー比に応じてキャリア周波数fcを連続的に切り換える場合の例についての説明である。
【0119】
次に、WCOMの電圧値に応じてキャリア周波数fcを連続的に切り換える場合の例について、前述したデューティー比の場合との相違点を中心に説明する。まず、図31に示した液体噴射装置100の構成例における電圧レベル判別手段260は、図18の処理で生成されるDS2を出力するようにする。また前述した場合と異なり、電圧レベル判別手段260はデューティー比Dnの情報については出力しない。ただし、図32に示したキャリア周波数切り換え処理において、ステップS804で行う処理を、図19で示したステップS301の内容に置き換える。以上のような処理を行うことで、WCOMの電圧値に応じてキャリア周波数fcを連続的に切り換えることが可能となる。
【0120】
図33は、第2実施例の変形例において、デジタル電力増幅器230での電力損失の増加を回避可能な理由を示した説明図である。
以上に説明した第2実施例の変形例では、図33に示すように、アクチュエーターに対して一定電圧を連続的に出力する状態において、WCOMの電圧値VがV<Xa・Vmax又はV>Xb・Vmaxとなった場合でも、平滑フィルター240のコイルに流れる電流の振幅|IA|が、閾値電流Ithに保たれるようにキャリア周波数fcを連続的に切り換えることができる。このため、出力に重畳するキャリアリップルを抑制しながら、前述したデジタル電力増幅器230での電力損失の増加を回避することが可能となる。
【0121】
C.第3実施例:
C−1.液体噴射型印刷装置(インクジェットプリンター)構成:
図34は、第1実施例、第2実施例およびそれぞれの変形例で説明した液体噴射装置100を、インクジェットプリンターとして適用した場合の、噴射ヘッドの内部構造を示した説明図である。具体的には前述した本発明における実施例のいずれかの液体噴射装置100を液体噴射型印刷装置(インクジェットプリンター)として適用した場合の、噴射ヘッド300の内部構造を示した説明図である。図示されるように、噴射ヘッド300の内部には、インクを溜めておく小さな複数のインク室301が設けられており、各インク室301の底面には、微細なインクノズル302が形成されている。また、各インク室301の壁面(図示した例では天井部分)には、前述したアクチュエーター116としてピエゾ素子303が設けられている。ピエゾ素子303には、前述したアクチュエーター駆動回路200から、駆動信号(COM)が印加される。何れかのピエゾ素子303に駆動信号を印加すると、そのピエゾ素子303が変形してインク室301の壁面(図示した例では天井)を変形させる。その結果、インク室301内のインクが押し出されるようにして、インクノズル302からインク滴として吐出されることになる。
【0122】
C−2.第3実施例での電力損失の増加の回避方法:
図35は、インクジェットプリンターのアクチュエーターであるピエゾ素子303に印加する駆動信号の基となる駆動波形信号の例を示した説明図である。具体的にはピエゾ素子303に印加する駆動信号(COM)の基となる駆動波形信号(WCOM)を例示した説明図である。インクジェットプリンターの噴射ヘッド300では、図35に示した様な台形状の駆動波形(時間とともに電圧が上昇し、その後降下して元の電圧値に戻る波形)をピエゾ素子303に印加することによって、インク滴を吐出している。このような駆動波形が印加されると、図35に示す期間A’や、さらには待機期間である期間B’において、前述したデジタル電力増幅器における電力損失の増加が起こり得る。そのような場合にも、前述した本発明における実施例のいずれかの液体噴射装置をインクジェットプリンターとして適用することで、前述した電力損失の増加を回避することが可能となる。
【0123】
以上、各種実施例のアクチュエーター駆動回路について説明したが、本発明は上記すべての実施例に限られるものではなく、その要旨を逸脱しない範囲において種々の態様で実施することが可能である。例えば、薬剤や栄養剤を内包するマイクロカプセルを形成することに用いる液体噴射装置など、医療機器を含む様々な電子機器に本実施例のアクチュエーター駆動回路を適用することで、電力効率が良く小型化の電子機器を提供することができる。また、前述したインクジェットプリンターに搭載されて、インクを噴射する噴射ノズルを駆動するためのアクチュエーター駆動回路に対しても、本発明を好適に適用することが可能である。
【符号の説明】
【0124】
100…液体噴射装置、110…脈動発生部、111…ノズル、112…流体噴射管、113…第2ケース、114…第1ケース、115…流体室、116…アクチュエーター、120…流体供給手段、121…第1接続チューブ、122…第2接続チューブ、123…流体容器、130…制御部、150…配線ケーブル、200…アクチュエーター駆動回路、210…駆動波形信号発生回路、220…変調回路、230…デジタル電力増幅器、240…平滑フィルター、250…DC判別手段、260…電圧レベル判別手段、270…キャリア周波数変更手段、280…三角波発生回路、290…比較器、300…インクジェットプリンターの噴射ヘッド、301…インク室、302…インクノズル、303…ピエゾ素子。
【特許請求の範囲】
【請求項1】
アクチュエーターに対して駆動信号を印加することによって、液体を噴射する液体噴射装置であって、
前記駆動信号の基準となる駆動波形信号を発生する駆動波形信号発生回路と、
前記駆動波形信号をパルス変調して変調信号を生成する変調回路と、
前記変調信号を電力増幅して電力増幅変調信号を生成するデジタル電力増幅器と、
前記電力増幅変調信号を平滑化することによって前記駆動信号を生成する平滑フィルターと、
を備え、
前記変調回路は、前記アクチュエーターの電位を一定に保つ期間に、前記駆動波形信号の電圧値に応じて、キャリア周波数を変更することを特徴とする液体噴射装置。
【請求項2】
請求項1に記載の液体噴射装置において、
前記変調回路は、前記駆動波形信号の電圧値が予め定められた所定の電圧値よりも小さい範囲にある場合に、前記キャリア周波数を、前記所定の電圧値以上の範囲で設定される基準キャリア周波数よりも低いキャリア周波数に設定することを特徴とする液体噴射装置。
【請求項3】
請求項1に記載の液体噴射装置において、
前記変調回路は、前記駆動波形信号の電圧値が予め定められた所定の電圧値よりも大きい範囲にある場合に、前記キャリア周波数を、前記所定の電圧値以下の範囲で設定される基準キャリア周波数よりも低いキャリア周波数に設定することを特徴とする液体噴射装置。
【請求項4】
請求項1に記載の液体噴射装置において、
前記変調回路は、
第一の電圧値と、前記第一の電圧値よりも大きい第二の電圧値とが予め定められており、前記駆動波形信号の電圧値が前記第一の電圧値よりも小さい場合に、前記キャリア周波数を、前記第一の電圧値から前記第二の電圧値までの範囲で設定される基準キャリア周波数よりも低い第一のキャリア周波数に設定し、
前記駆動波形信号の電圧値が前記第二の電圧値よりも大きい場合に、前記キャリア周波数を、前記基準キャリア周波数よりも低い第二のキャリア周波数に設定することを特徴とする液体噴射装置。
【請求項5】
請求項1ないし請求項4の何れか一項に記載の液体噴射装置を備えたことを特徴とする医療機器。
【請求項1】
アクチュエーターに対して駆動信号を印加することによって、液体を噴射する液体噴射装置であって、
前記駆動信号の基準となる駆動波形信号を発生する駆動波形信号発生回路と、
前記駆動波形信号をパルス変調して変調信号を生成する変調回路と、
前記変調信号を電力増幅して電力増幅変調信号を生成するデジタル電力増幅器と、
前記電力増幅変調信号を平滑化することによって前記駆動信号を生成する平滑フィルターと、
を備え、
前記変調回路は、前記アクチュエーターの電位を一定に保つ期間に、前記駆動波形信号の電圧値に応じて、キャリア周波数を変更することを特徴とする液体噴射装置。
【請求項2】
請求項1に記載の液体噴射装置において、
前記変調回路は、前記駆動波形信号の電圧値が予め定められた所定の電圧値よりも小さい範囲にある場合に、前記キャリア周波数を、前記所定の電圧値以上の範囲で設定される基準キャリア周波数よりも低いキャリア周波数に設定することを特徴とする液体噴射装置。
【請求項3】
請求項1に記載の液体噴射装置において、
前記変調回路は、前記駆動波形信号の電圧値が予め定められた所定の電圧値よりも大きい範囲にある場合に、前記キャリア周波数を、前記所定の電圧値以下の範囲で設定される基準キャリア周波数よりも低いキャリア周波数に設定することを特徴とする液体噴射装置。
【請求項4】
請求項1に記載の液体噴射装置において、
前記変調回路は、
第一の電圧値と、前記第一の電圧値よりも大きい第二の電圧値とが予め定められており、前記駆動波形信号の電圧値が前記第一の電圧値よりも小さい場合に、前記キャリア周波数を、前記第一の電圧値から前記第二の電圧値までの範囲で設定される基準キャリア周波数よりも低い第一のキャリア周波数に設定し、
前記駆動波形信号の電圧値が前記第二の電圧値よりも大きい場合に、前記キャリア周波数を、前記基準キャリア周波数よりも低い第二のキャリア周波数に設定することを特徴とする液体噴射装置。
【請求項5】
請求項1ないし請求項4の何れか一項に記載の液体噴射装置を備えたことを特徴とする医療機器。
【図1】


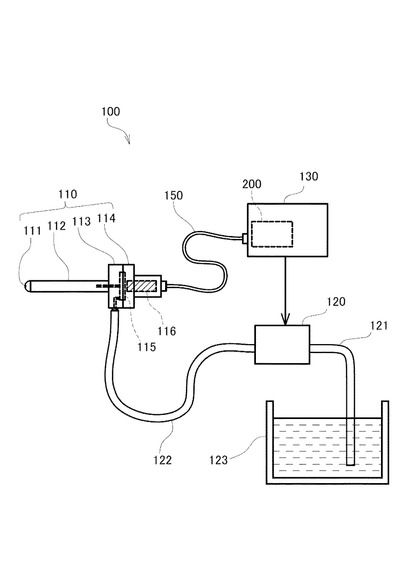
【図2】
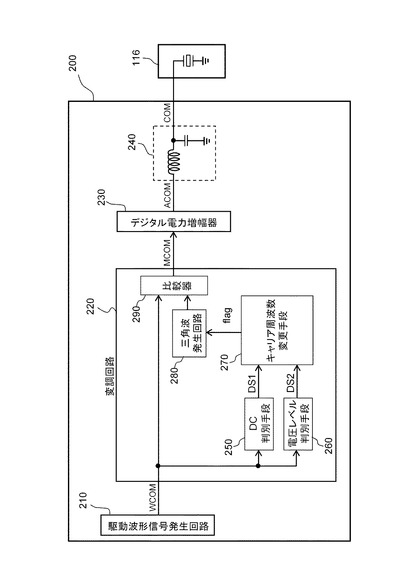
【図3】
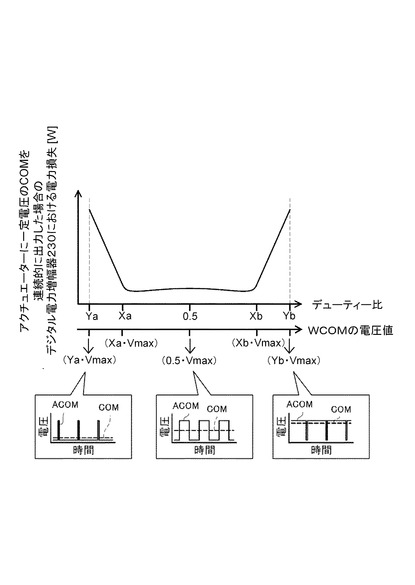
【図4】
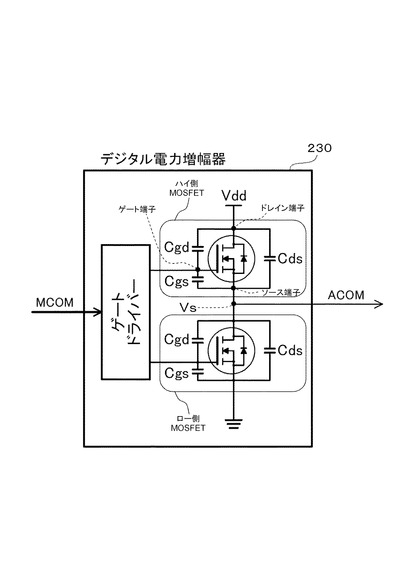
【図5】
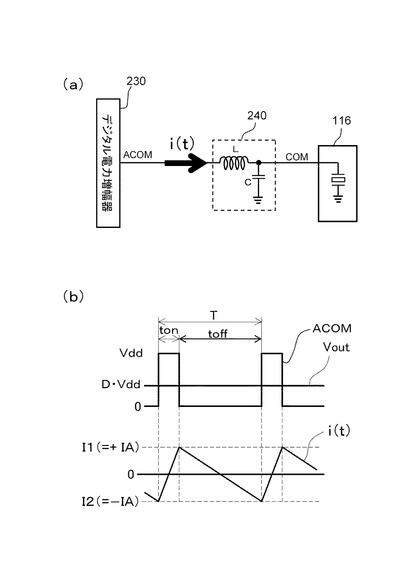
【図6】
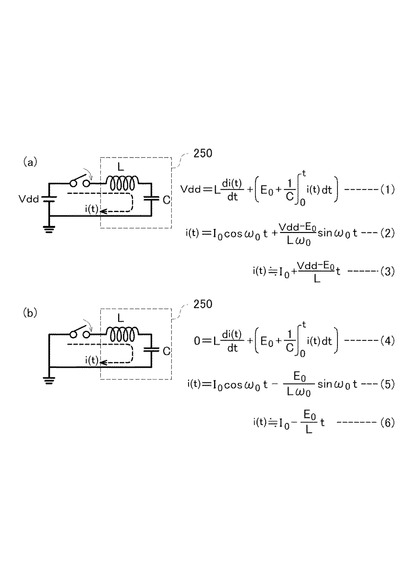
【図7】
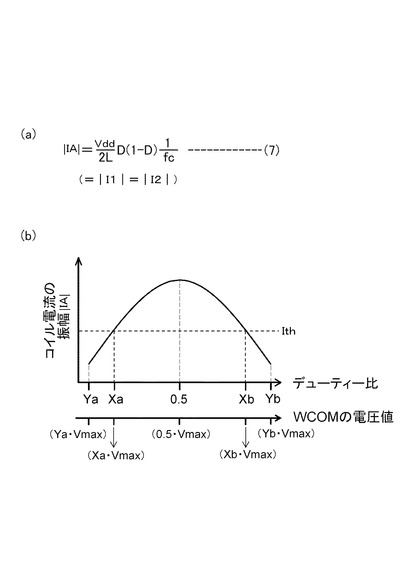
【図8】
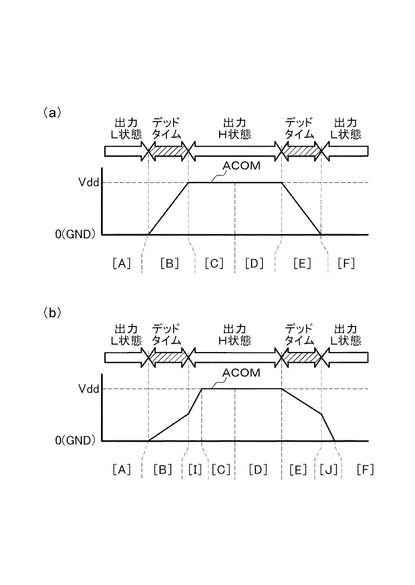
【図9】
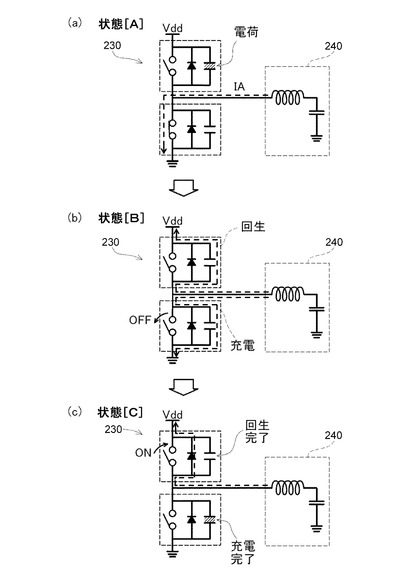
【図10】
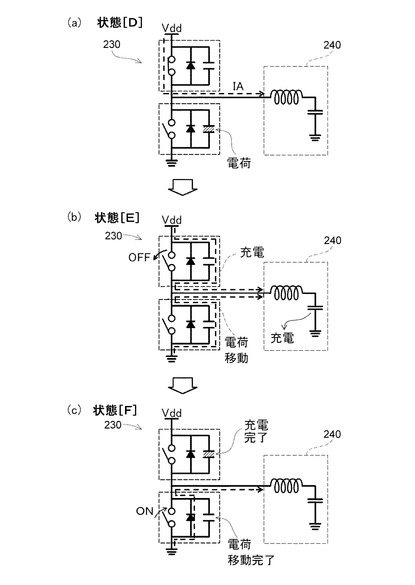
【図11】
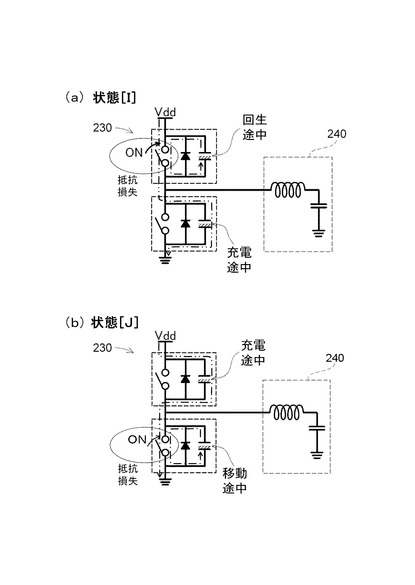
【図12】
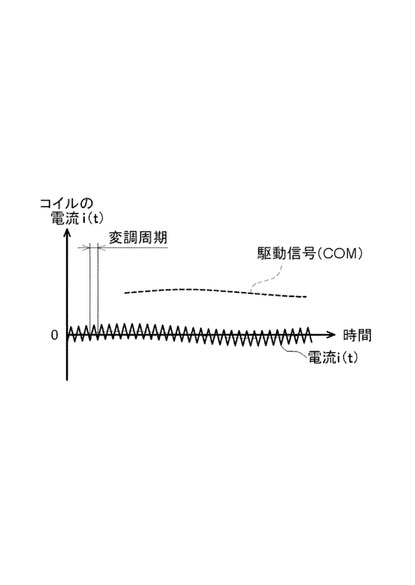
【図13】
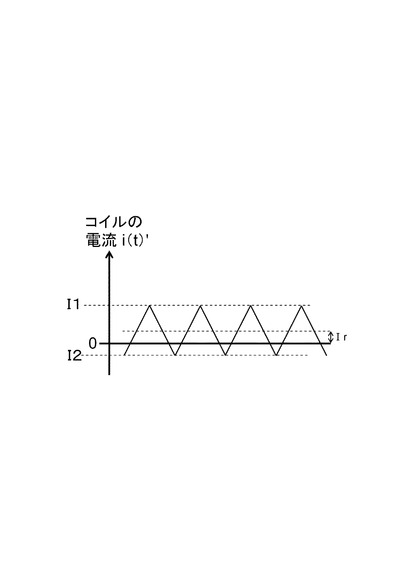
【図14】
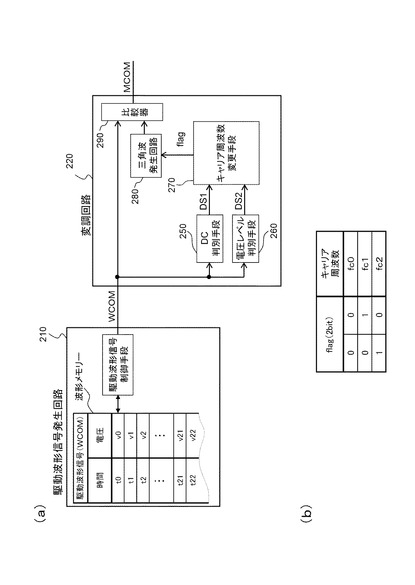
【図15】
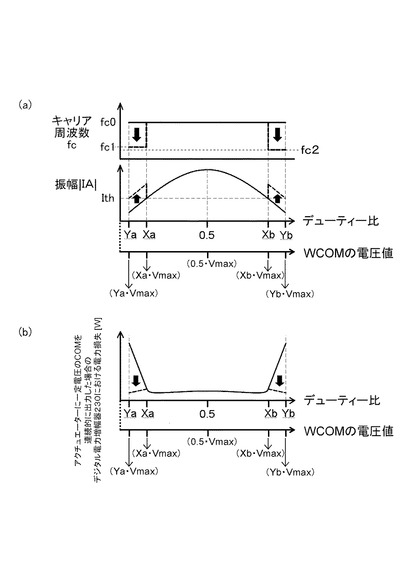
【図16】
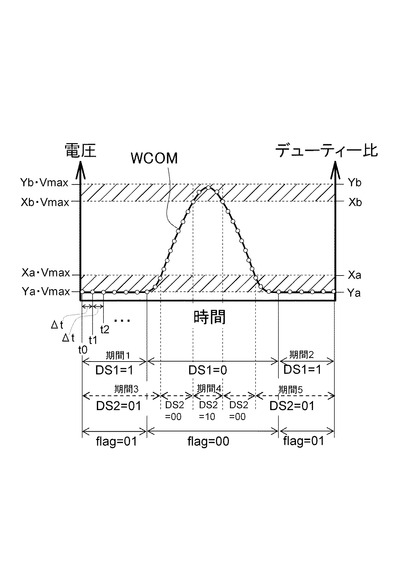
【図17】
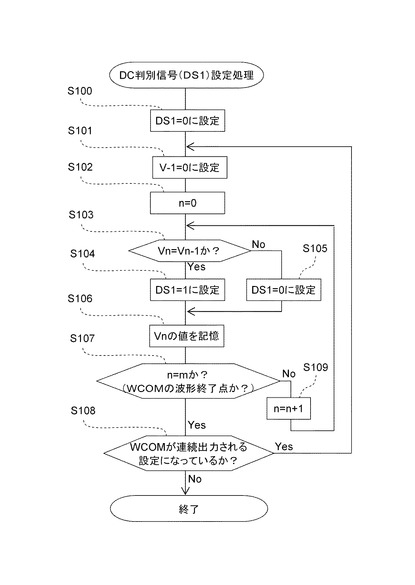
【図18】
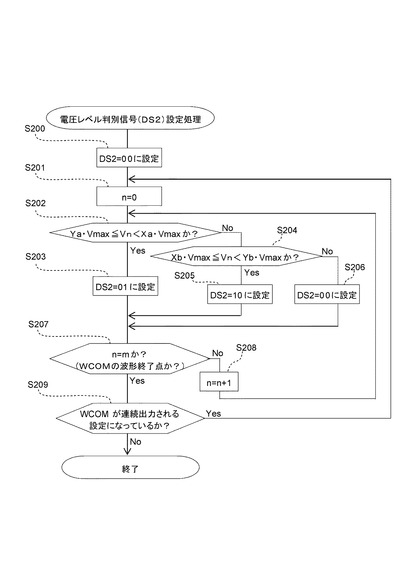
【図19】
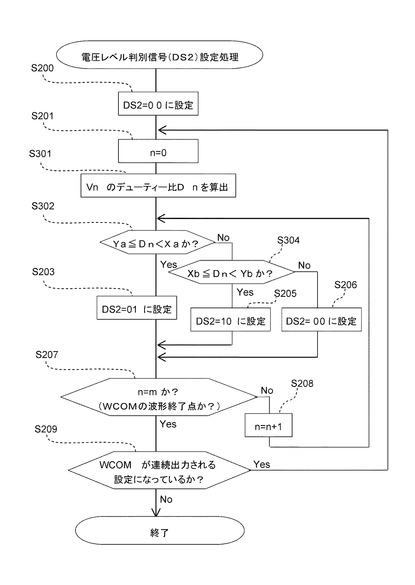
【図20】
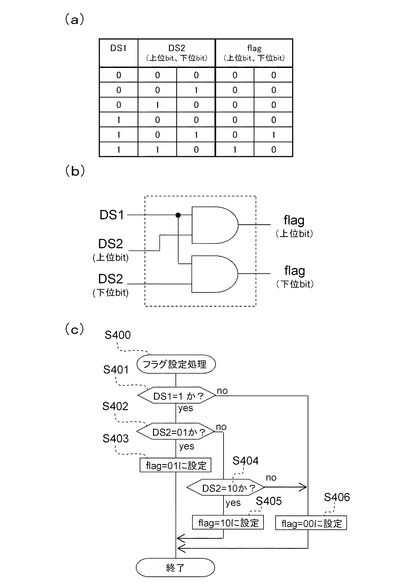
【図21】
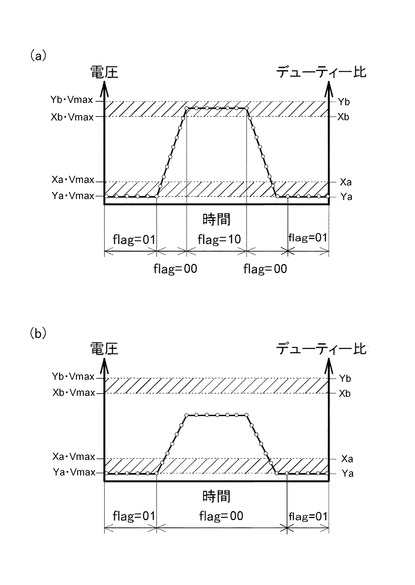
【図22】
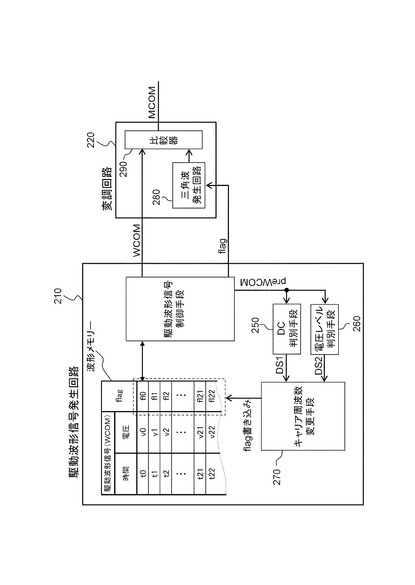
【図23】
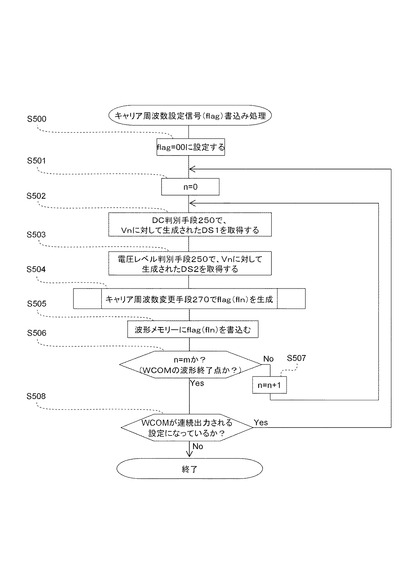
【図24】
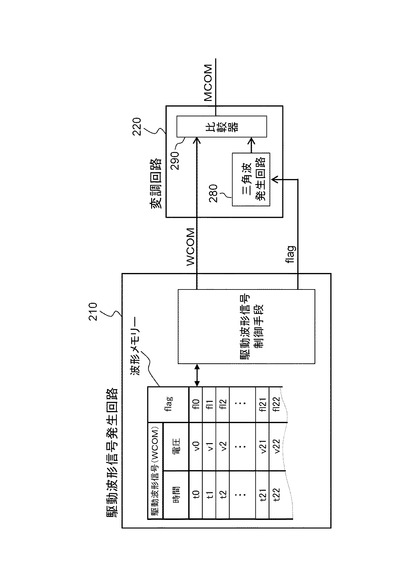
【図25】
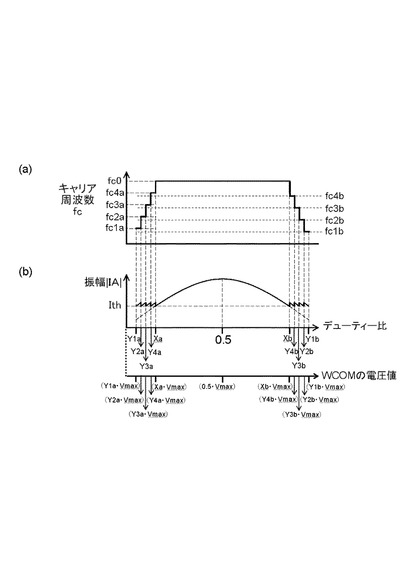
【図26】
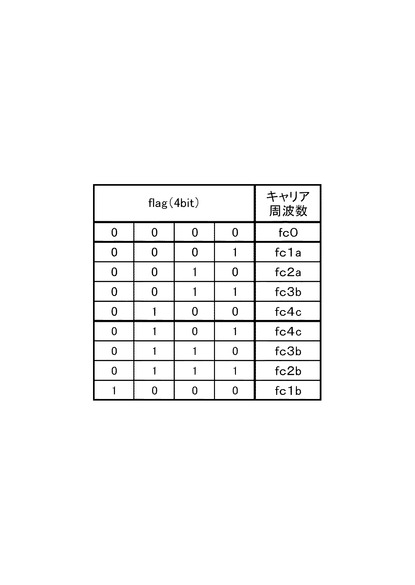
【図27】
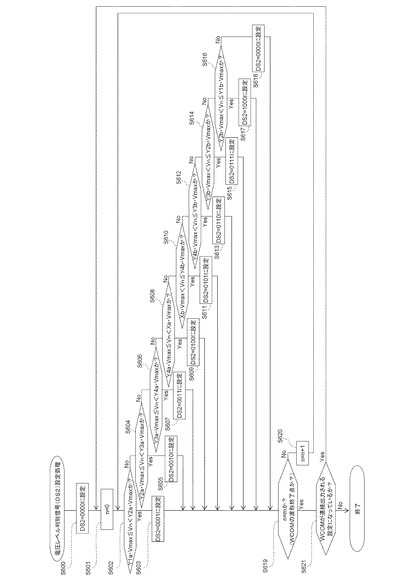
【図28】
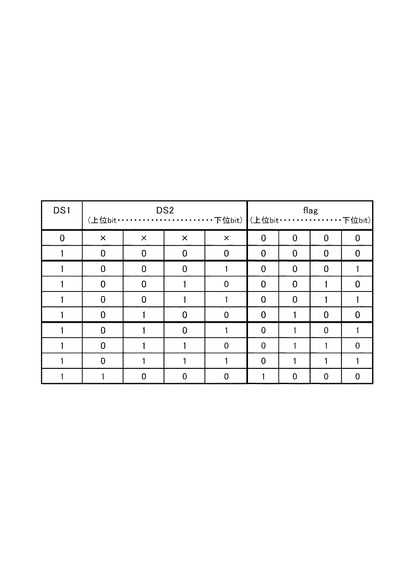
【図29】
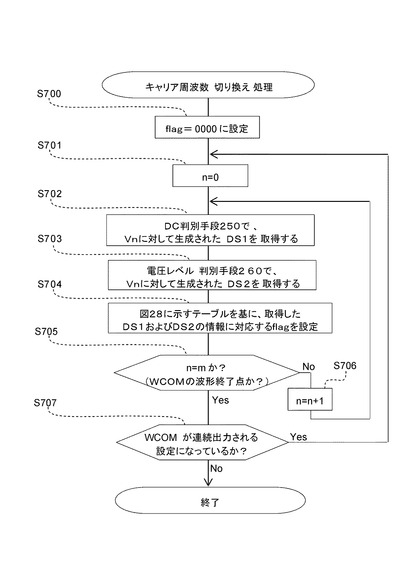
【図30】
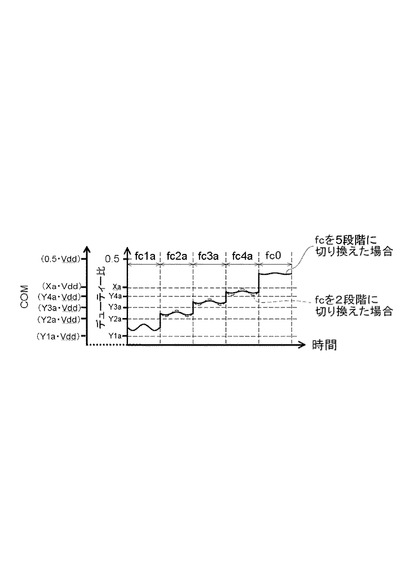
【図31】
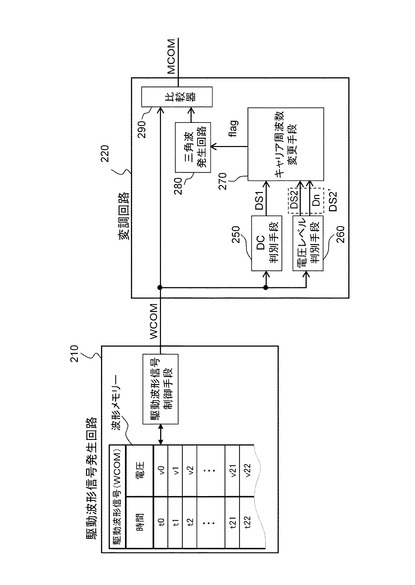
【図32】
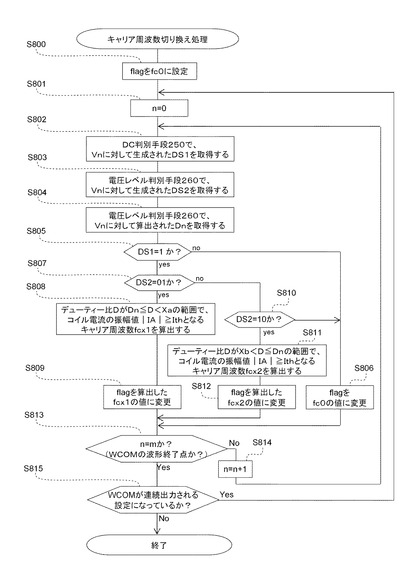
【図33】
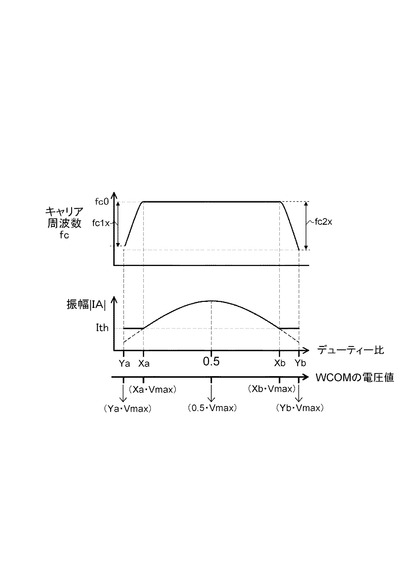
【図34】
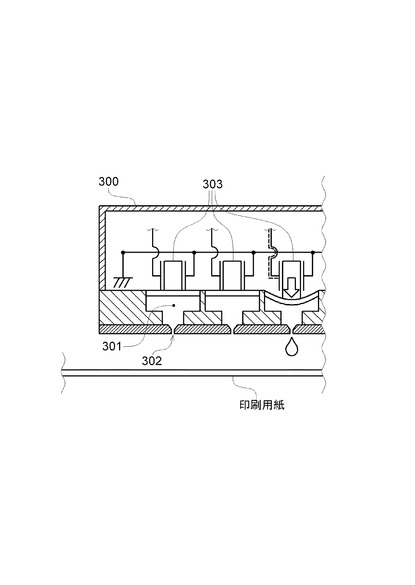
【図35】
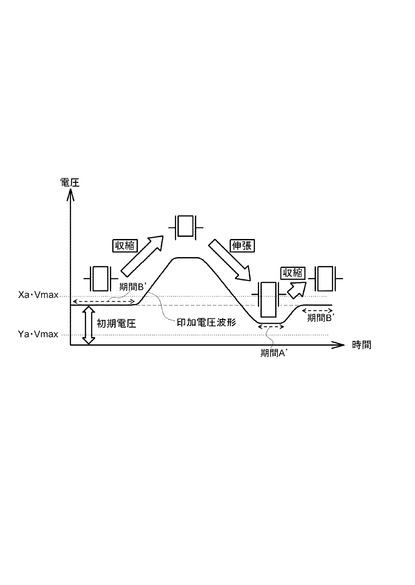
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【公開番号】特開2013−59433(P2013−59433A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−199119(P2011−199119)
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]