
液体採取装置
【課題】保護容器8内に収容されたバイアル10に充填されている液体10aを採取するためのシリンジ12の注射針11aを、バイアル10のゴム栓に確実に突き刺す。
【解決手段】液体10aが充填されているバイアル10が天面の開放した保護容器8内に収容されており、この保護容器8は保護容器固定グリッパ44に保持される。保護容器8の上方に昇降可能なセンタリングガイド46が配置され、このセンタリングガイド46を下降させてバイアル10を保護容器8に対して位置決めする。位置決めしたバイアル10にシリンジ12の注射針11aを突き刺し、バイアル10内の液体を吸引して採取する。
【解決手段】液体10aが充填されているバイアル10が天面の開放した保護容器8内に収容されており、この保護容器8は保護容器固定グリッパ44に保持される。保護容器8の上方に昇降可能なセンタリングガイド46が配置され、このセンタリングガイド46を下降させてバイアル10を保護容器8に対して位置決めする。位置決めしたバイアル10にシリンジ12の注射針11aを突き刺し、バイアル10内の液体を吸引して採取する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、バイアル等の検体容器に充填されている液体を採取する液体採取装置に係り、特に、液体が充填された検体容器を保護容器内に収容した状態で、この検体容器から液体を採取する液体採取装置に関するものである。
【背景技術】
【0002】
バイアルなどの検体容器に充填されている液体を採取する場合には、バイアルに液体採取用の針を突き刺して、ポンプまたはシリンジによって吸引して液体を採取するようにしている。例えば、特許文献1には、ロボット室内にロボットを配置し、このロボット室にワーク着脱テーブルを有するストッカー室を結合しており、ロボット室内に処理容器およびポンプ等の処理機材一式が配置されたワークベースを搬入し、ワークベースごとに処理を行う「バイアル等の自動無菌試験操作装置」が記載されている。この特許文献1の装置はロボットにより吸引作業を行うが、検体容器から薬液等の検体を吸引する吸引手段としてポンプを用いており、吸引した検体を他の培養容器に充填するようにした。
【0003】
ところで、前記培養試験が行われる薬液には、人体に対して危険性が高いものが存在しており、このような薬液を検体として扱う場合には、その薬液を充填した検体容器を保護容器内に収容した状態で取り扱うようにしている。例えば、特許文献2に記載された発明では、放射性医薬が充填されたバイアルを、被爆を防ぐため、鉛製の容器内に収容している。
【特許文献1】特許第3684250号公報(第4−12頁、図1)
【特許文献2】特表2005−531334号公報(第7−13頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0004】
前記のように保護容器(鉛製容器)内に検体容器(バイアル)を収容している場合には、検体容器内の液体の採取作業を行う際にも、検体容器を保護容器内に収容したままで行う。通常検体容器は保護容器に対してクリアランスを有する状態で収容されており、保護容器を外部から保持して位置決めを行っても、内部に収容されている検体容器は位置決めされていない状態である。バイアルは小さいものも多く、針を刺す箇所も非常に狭い範囲となるので、バイアルを正確に位置決めしておかないと、液採取用の針を刺す際にミスが発生するおそれがある。
【課題を解決するための手段】
【0005】
本発明は、天面が開放した第1容器の内部に収容された第2容器に充填されている液体を採取する液体採取装置において、前記第1容器を支持する容器支持手段と、前記第2容器に液体採取用の針を刺す針突き刺し手段と、突き刺した採取用の針を介して第2容器から液体を吸引採取する吸引手段とを備え、さらに、前記容器支持手段の上方に、第2容器のセンタリングを行うセンタリング部材を昇降可能に設け、液体採取を行う際に、このセンタリング部材を下降させて第1容器内で第2容器の位置決めを行うことを特徴とするものである。
【0006】
また、請求項2に記載の発明は、前記容器支持手段とセンタリング部材とを一体的に倒立させる倒立機構を設け、倒立させた第2容器から液体を採取することを特徴とするものである。
【0007】
さらに、請求項3に記載の発明は、前記針突き刺し手段はロボットであることを特徴とするものである。
【発明の効果】
【0008】
本発明の液体採取装置は、第1容器内に収容した第2容器を、センタリング部材によって位置決めして液体の採取を行うようにしたので、小さいバイアルであっても液採取用の針を確実に突き刺すことができる。
【発明を実施するための最良の形態】
【0009】
液体が充填された第2容器を天面が開放された第1容器内に収容し、第1容器を保持する容器保持手段の上方に設けたセンタリング部材で、第2容器を第1容器内で位置決めした状態で、第2容器に液体採取用の針を突き刺し、この採取用の針を介して第2容器内の液体を吸引して採取するという構成で、液体採取用の針を第2容器に確実に突き刺すという目的を達成する。
【実施例1】
【0010】
以下、図面に示す実施例により本発明を説明する。図1は本発明の一実施例に係る液体採取装置を備えた培養試験装置の全体の構成を示す平面図である。この装置は、無菌チャンバー2内に作業ロボット4が設置され、このロボット4の作業範囲内にキャッパ等の各種処理手段が配置され、検体容器(この実施例ではバイアル)内に充填されている薬液をシリンジによって採取し、この採取した薬液を培地容器内に注入するようになっている。なお、この実施例の無菌チャンバー2は、天井から無菌エアを吹き出して内部の清浄環境を維持しているが、完全な無菌状態を維持したチャンバーである必要はない。また、作業ロボット4には、後に順次説明するように、バイアルを収容した保護容器を把持する保護容器用グリッパ、シリンジの円筒部を把持するシリンジ用グリッパ、あるいはシリンジのプランジャロッドを押圧するプレート等各種の作業を行うためのグリッパやプレート類が選択可能に備えられている。
【0011】
無菌チャンバー2の一方の壁面(図2の左側の壁面)2aに容器等の出し入れを行う開閉扉6が設けられている。この開閉扉6の内部側にトレイ置き場Pがあり、薬液が充填され、キャップ付きの保護容器(鉛容器)8内に収容されたたバイアル10(後に説明する図9(f)参照)およびシリンジ12と培地容器14が、供給トレイ16上の所定の位置に起立した状態で保持され、人手によってこの無菌チャンバー2内のトレイ置き場Pに供給される。なお、この供給トレイ16には、後に説明する培地容器14を載せるスペース18が設けられており、薬液が注入された培地容器14が、このトレイ16上に載せられて無菌チャンバー2内から取り出される。なお、請求項1の第1容器がこの実施例の保護容器10であり、第2容器がバイアル10である。また、シリンジ12が液体を吸引する吸引手段である。
【0012】
この実施例で使用されるシリンジ12について、図5により簡単に説明する。シリンジ12は、円筒部12aの一端に注射針(液体採取用の針)11aを取り付ける小径部12bが、そして、他端のガスケット13aを挿入する側の開口部にフランジ12cが形成されている。前記小径部12bに、保持カップ11bを介して注射針11aが取り付けられる。さらに、その外側から保護キャップ20が被せられる(図7参照)。フランジ12c側の開口部から円筒部12a内に挿入されたガスケット13aには、プランジャロッド13bが連結されており、このプランジャロッド13bの押圧面13cを操作することによって、ガスケット13aをシリンジ12の円筒部12a内で進退動させて、円筒部12a内に薬液を吸引し、また、その薬液を放出することができる。
【0013】
無菌チャンバー2内には、図1の左側から順に、シリンジ12の保護キャップ20を外す保護キャップ外し機構22、前記バイアル10の保護容器である鉛容器8のキャップ8a(図2参照)を外し、またバイアル10からの薬液の採取後にそのキャップ8aを装着する保護容器用キャッパ・デキャッパ24、保護容器8内に収容されているバイアル10およびシリンジ12を固定し、一体的に反転させて倒立状態にする固定・回転装置26、シリンジ12によってバイアル10から採取した薬液を、培地容器14内に注入する注入ステーション28、培地容器14のキャップ14a(図6参照)を外し、また、薬液をこの培地容器14内に注入した後に前記キャップ14aを装着する培地容器用キャッパ・デキャッパ30が配置されている。さらに、無菌チャンバー2内の、図1の上方の角には、バイアル10からの薬液採取作業が終了した保護容器8を無菌チャンバー2の外部に搬出する保護容器排出コンベヤ32が設置されている。
【0014】
前記供給トレイ16には、保護容器8を起立した状態で保持する保護容器保持孔、シリンジ12を注射針11aを下方に向けた状態で挿入して保持するシリンジ保持孔、培地容器14を起立した状態で挿入して保持する培地容器保持孔が、それぞれ3個ずつ並べて設けられており、各孔にそれぞれ保護容器8、シリンジ12および培地容器14を直立した状態で挿入して保持させる。
【0015】
保護容器用キャッパ・デキャッパ24は、図2に示すように、無菌チャンバー2の底面2a上に直立して固定されたシリンダ34のピストンロッド34aの上端に、水平な昇降ヘッド36が固定され、この昇降ヘッド36の先端部寄りに下向きの吸着パッド38が取り付けられている。この吸着パッド38の下方に、前記作動ロボット4のハンド4aに取り付けられている保護容器用グリッパ40が保持している保護容器8が供給されると、前記シリンダ34の作動によって吸着パッド38が下降し、保護容器8のキャップ8aを吸着する。その後、シリンダ34によって吸着パッド38を上昇させて保護容器8のキャップ8aを上方へ外す(図2に示す状態)。
【0016】
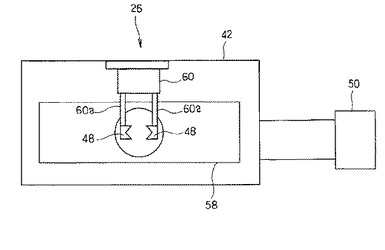
固定・回転装置26は、図3および図4に示すように、可動ベース42上に設置され、保護容器8を把持する一対の保護容器固定グリッパ(第1容器を支持する支持手段)44と、保護容器8内に収容されているバイアル10の保護容器8内での位置決めを行うセンタリングガイド(センタリング部材)46と、このセンタリングガイド46の上方でシリンジ12を保持するシリンジ固定グリッパ48とを備えている。そして、可動ベース42上に設置されたこれら保護容器固定グリッパ44と、センタリングガイド46およびシリンジ固定グリッパ48は、ロータリアクチュエータ50の作動によって、可動ベース42ごと反転されるようになっている。なお、この実施例では、ロータリアクチュエータ50が、保護容器固定グリッパ44およびセンタリングガイド46を180度回転させて倒立状態にする倒立機構を構成している。
【0017】
前記保護容器固定グリッパ44は、可動ベース42上に直立して固定された一対の支柱52上に、それぞれ固定されている一対の水平なエアシリンダ54の、ピストンロッド54aの先端に取り付けられて互いに向かい合っており、両エアシリンダ54の作動によって接近離隔し、接近時には支持台55上に載置された保護容器8を把持し、また離隔時には保護容器8を解放するようになっている。これら保護容器固定グリッパ44は、把持している保護容器8が倒立状態になっても位置がずれないように、確実に固定できるようになっている。
【0018】
センタリングガイド46は、後に説明する図9(g)に示すように環状をしており、前記可動ベース42上に直立して設置された一対のシリンダ56の、ピストンロッド56aの上端間に取り付けられた水平プレート58の下面側に固定されている。このセンタリングガイド46は、保護容器8が供給される時には、図3に示すように水平プレート58とともに上昇し、可動ベース42がロータリアクチュエータ50によって回転する際には、下降して保護容器8内に収容されているバイアル10の位置決めを行う。水平プレート58には、前記環状のセンタリングガイド46の中央の円形穴46aに連通する貫通穴58a(図9(a)参照)が形成されており、この貫通穴58a内をシリンジ12の先端に取り付けられた液体採取用の針11aが挿通される。
【0019】
シリンジ固定グリッパ48は、開閉用シリンダ60によって開閉する一対のロッド60aの先端に取り付けられており、開閉用シリンダ60の作動により接近離隔することによってシリンジ12を把持し、また解放する。これら両グリッパ48は前記水平プレート58の外側からその上方に向かって伸びており、互いに接近してシリンジ12を把持した時には、シリンジ12の中心が、前記センタリングガイド46の中心に位置するようになっている。
【0020】
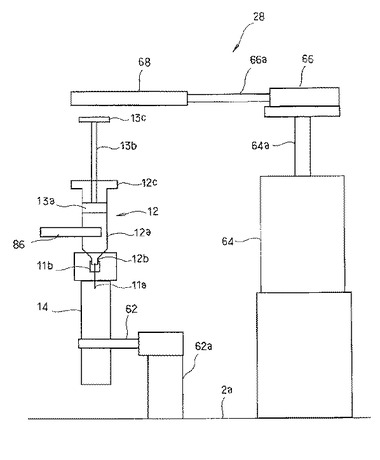
前記固定・回転装置26に隣接して、注入ステーション28が配置されている。この注入ステーション28には、図5に示すように、培地容器14を保持する培地容器保持グリッパ62と、シリンジ12のプランジャロッド12bの押圧面13cを押圧してシリンジ12内に収容されている薬液を培地容器14に注入する注入機構が設けられている。培地容器保持グリッパ62は、前記無菌チャンバー2の底面2aに固定された支柱62a上に取り付けられており、培地容器14を直立した状態でグリップする。注入機構は、前記底面2a上に直立して配置された昇降用サーボシリンダ64と、このサーボシリンダ64のピストンロッド64aの上端に取り付けられた水平シリンダ66と、この水平シリンダ66のピストンロッド66aの先端に取り付けられて水平方向に進退動するプランジャ押し込みプレート68を備えている。
【0021】
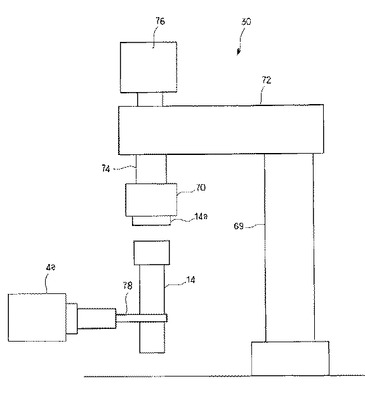
さらに、図1の最も右端側には、培地容器14のキャップ14aを外し、シリンジ12から薬液を注入した後、このキャップ14aを再び培地容器14に装着する培地容器用キャッパ・デキャッパ30が配置されている(図6参照)。この実施例の培地容器14は回転式のキャップ14aが装着されているので、この培地用キャッパ・デキャッパ30は回転可能なキャッピングヘッド70を備えている。直立した支柱69上に固定された水平な支持体72に、下端にキャッピングヘッド70が設けられた回転軸74が回転自在に支持され、モーター76の駆動によりこのキャッピングヘッド70を正逆回転させることにより、培地容器14のキャップ14aを外し、また、キャップ14aを装着する。この培地容器用キャッパ・デキャッパ30では、前記作業ロボット4のハンド4aに取り付けられた培地容器用グリッパ78によって培地容器14をグリップして、前記キャッピングヘッド70の下方に移動させ、さらに上昇させて、培地容器14のキャップ14aをキャッピングヘッド70に係合させ、その後、キャッピングヘッド70を回転させることによりキャップ14aを外す。また、キャッピングヘッド70を逆回転させることによりキャップ14aを培地容器14に螺合する。
【0022】
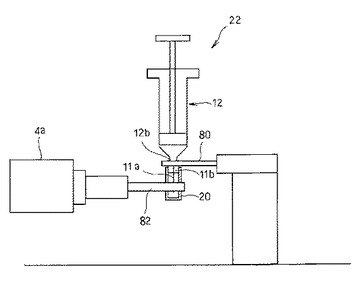
前記トレイ置き場Pに隣接して配置された保護キャップ外し機構22は、図7に示すように、シリンジ12の先端小径部12bに取り付けられている保持カップ11bを把持するグリッパ80を備えている。この実施例のシリンジ12は、先端小径部12bに注射針11aが保持カップ11bを介して取り付けられており、さらに、この注射針11aおよび保持カップ11bの外側に保護キャップ20が被せられている。この保護キャップ外し機構22では、前記保持カップ把持グリッパ80によって保持カップ11bを把持している状態で、作業ロボット4のハンド4aに取り付けた保護キャップ用グリッパ82によって保護キャップ20をグリップし、保持カップ11bから保護キャップ20を外すようになっている。なお、この保護キャップ外し機構22には、シリンジ12から外した保護キャップ20および使用済みのシリンジ12を排出するリジェクトボックス22aが設けられている。
【0023】
前記構成の培養試験装置の作動について説明する。先ず、供給トレイ16の各保持孔内に、バイアル10を収容した保護容器(鉛容器)8、バイアル10内の薬液を吸引するシリンジ12およびシリンジ12が吸引した薬液を注入される培地容器14を、それぞれ挿入して保持させる。無菌チャンバー2の開閉扉6を人手で開けてこの供給トレイ16を無菌チャンバー2内に挿入する。
【0024】
バイアル10が収容されキてャップ8aが被せられている保護容器8を、作業ロボット4の保護容器用グリッパ40で把持して供給トレイ16から取り出し、保護容器キャッパ・デキャッパ24へ移送して吸着パッド38の下方に位置させる。そこで直立したシリンダ34を作動させて昇降ヘッド36を下降させ、その下面に取り付けられている吸着パッド38を、保護容器8のキャップ8aの上面に当接させてキャップ8aを吸着する。キャップ8aを吸着した後、シリンダ34の作動によって吸着パッド38を上昇させて保護容器8のキャップ8aを外す(図2に示す状態)。外されたキャップ8aは、そのまま吸着パッド38に保持される。
【0025】
キャップ8aが外された保護容器8を、作業ロボット4の保護容器用グリッパ40で把持したまま、隣の固定・回転装置26に移動させ、両側の保護容器固定グリッパ44間の支持台55上に載せる。その後、両側の水平シリンダ54を作動させて両保護容器固定グリッパ44を接近させ、保護容器8を両側からグリップする。
【0026】
前記固定・回転装置で保護容器8を離した作業ロボット4は、次に、培地容器用グリッパ78(図6参照)によって供給トレイ16上の培地容器14を把持して取り出す。そして、取り出した培地容器14を培地容器キャッパ・デキャッパ30へ移送し、キャッピングヘッド70の下方に位置させる。その後、培地容器14を上昇させてそのキャップ14aをキャッピングヘッド70に係合させる。モータ76によってキャッピングヘッド70を回転させて培地容器14のキャップ14aを外す。このキャップ14aは、そのままキャッピングヘッド70に保持される。続いて、キャップ14aが外された培地容器14を下降させ、隣接する注入ステーション28(図5参照)に移動させる。この注入ステーション28には、培地容器保持グリッパ62が設けられており、この培地容器保持グリッパ62が、作業ロボット4の培地容器用グリッパ78から培地容器14を受け取って保持する。
【0027】
シリンジ12は、供給トレイ16のシリンジ保持孔内に液体採取用の針11aを下方に向けた状態で保持されており、フランジ12cの高さは同一になっている。ところが、シリンジ12内のガスケット13aの位置は必ずしも同一ではなく、異なっている場合がある。従って、プランジャロッド13bの上端の押圧面13cの高さも一律ではない。そこで、供給トレイ16からシリンジ12を取り出して移動させる前に、プランジャロッド12bの押圧面13cの高さ、つまりシリンジ12内のガスケット13aの位置を同一にするように補正を行う。補正後のガスケット13aの位置は、シリンジ12の円筒部12aの最も下端まで押し込んだ位置であり(図8の一番右側のシリンジ12参照)、この位置を零点と呼ぶことにする。
【0028】
作業ロボット4は、ガスケット13aが零点にある時のプランジャロッド12bの押圧面13cの位置と、供給トレイ16側の基準位置S(この実施例ではトレイ16の上面)との距離Lを記憶している。また、ガスケット13aが最も高い位置にある時の押圧面と基準位置Sとの距離+所定距離αも記憶している。そして、零点補正を行う際には、作業用ロボット4のハンド4aに取り付けられている補正用プレート84を使用する。ロボット4は、補正用プレート84を、ガスケット13aがシリンジ12内で最も高い位置にある時のプランジャロッド12bの押圧面13c(図8の左端のシリンジ12参照)の位置よりも上方(最も高い位置にある時の押圧面13cよりもαだけ上方)に移動させ、下降して押圧面13cの位置と前記基準位置Sとの距離がLとなるように、プランジャロッド13bを下降させてガスケット13aを前記零点まで押し込む。このようにロボット4の動作によって、全てのシリンジ12のガスケット13aを零点位置に揃えるようにしたので、常に正確な量の薬液を採取することができる。また、人手を介さないので、シリンジ12の無菌状態を損なうこともない。
【0029】
前述のようにガスケット13aを最も内部まで押し込んで同一の高さに揃えたシリンジ12は、供給トレイ16から取り出されて保護キャップ外し機構22に移動される(図7参照)。保護キャップ外し機構22に送られたシリンジ12は、保持カップ把持グリッパ80に引き渡される。この保持カップ把持グリッパ80は、シリンジ12の先端小径部12bに液体採取用の注射針11aを取り付けるための保持カップ11bをグリップする。注射針11aを下方に向けた状態で保持カップ把持グリッパ80に保持されているシリンジ12の下方から、ロボットハンド4aに取り付けられている保護キャップ用グリッパ82を接近させ、シリンジ12の最も下端に位置している保護キャップ20を把持する。保護キャップ20を把持した保護キャップ用グリッパ82を下降させることにより、シリンジ12から保護キャップ20を外す。シリンジ12から外した保護キャップ20は、リジェクトボックス22aに廃棄される。
【0030】
保護キャップ20を外したシリンジ12を、ロボット4のシリンジ用グリッパ86(図5参照)によってグリップして固定・回転装置26に移動させる。固定・回転装置26にはシリンジ固定グリッパ48が設けられており、シリンジ12は、ロボット4によってバイアル10に突き刺された後、このシリンジ固定グリッパ48に引き渡される。
【0031】
この固定・回転装置26の動作について、図9により説明する。前記のようにすでにこの固定・回転装置26に送られて保護容器固定グリッパ44に把持されている保護容器8の上方に、センタリングガイド46が設けられており、両シリンダ56の作動により水平プレート58とともにセンタリングガイド46を下降させ(図9(a)参照)、センタリングガイド46を保護容器8の内部に挿入する。保護容器8はキャップ8aが外された状態で、内部にバイアル10が収容されており(図9(f)参照)、保護容器8の開口とバイアル10の上部との間に環状のセンタリングガイド46を挿入して、保護容器8内でのバイアル10の位置決めを行う(図9(g)参照)。
【0032】
保護容器8内でバイアル10の位置決めをした後、保護キャップ外し機構22で保護キャップ20を外したシリンジ12を、ロボット4のシリンジ用グリッパ86が保持してこの固定・回転装置26まで移動させ、前記センタリングガイド46および水平プレート58の貫通孔の中心部の上方から垂直に下降させ(図9(b)参照)、シリンジ12の針11aをバイアル10の上面のゴム栓に突き刺して、その先端を僅かに内部に突出させる。このようにセンタリングガイド46を下降させて保護容器8内のバイアル10を位置決めした状態で、シリンジ12の液体採取用の針11aを突き刺すようにしたので、バイアル10のサイズが小さく、針11aを刺すゴム栓のスペースが狭い場合でも、確実に突き刺すことができる。その後、開閉用シリンダ60を作動させてシリンジ固定グリッパ48によりシリンジ12の円筒部12aをグリップして固定する(図9(c)参照)。なお、この実施例では、作業ロボット4がバイアル10に液体採取用の針11aを突き刺す突き刺し手段を構成している。
【0033】
前記のように保護容器8を保護容器固定グリッパ44によって把持し、この保護容器8内に収容されているバイアル10をセンタリングガイド46によって位置決めし、さらに、バイアル10のゴム栓に注射針11aを差し込んだシリンジ12をシリンジ固定グリッパ48によって把持した状態で、ロータリアクチュエータ50の作動によって可動ベース42を180度回転させることにより、これら保護容器8、バイアル10およびシリンジ12を一体として反転させて倒立状態にする(図9(d)参照)。バイアル10を正立させた状態でそのゴム栓にシリンジ12の液体採取用の針12aを突き刺すと、図9(h)に示すように、バイアル10内部の薬液10aはバイアル10の下部に溜まり、シリンジ12の針11aは上方の蓋から内部側に僅かに先端を望ませているだけなので、薬液を吸引することはできないが、反転させて倒立状態にすると、図9(j)に示すように、バイアル10のゴム栓側に薬液が溜まるので、シリンジ12により薬液を吸引することが可能になる。
【0034】
保護容器8内に収容されているバイアル10とシリンジ12とが一体的に反転されて倒立状態になった後、ロボット4のグリッパ(図示せず)によってシリンジ12のプランジャロッド13bを引き下げる(図9(e)参照)。プランジャロッド13bとともに、シリンジ12内のガスケット13aが下降し、バイアル10内の薬液10aがシリンジ12内に吸引される。バイアル10からの薬液の吸引を終了した後、ロボット4のグリッパがプランジャロッド13bを離し、続いて、ロータリアクチュエータ50によって可動ベース42を逆方向に180度回転させて、保護容器8内に収容されたバイアル10およびシリンジ12を反転させて正立状態に戻す。
【0035】
薬液を吸引して内部に収容したシリンジ12は、作業ロボット4のシリンジ保持用グリッパ86に把持されてバイアル10から抜き取られ、固定・反転装置26から注入ステーション28に移される。注入ステーション28では、キャップ14aを外された培地容器14が、注入ステーション28に設置されている培地容器保持グリッパ62に把持されて待機している。ロボット4のシリンジ保持用グリッパ86に把持されたシリンジ12は、培地容器保持グリッパ62に直立した状態で把持されている培地容器14の上方開口部から注射針11aが挿入される。注入ステーション28には、プランジャ押し込みプレート68が設けられており、シリンジ12を培地容器14の上方に移動させる際には、水平シリンダ66によって後退させておき、シリンジ12を培地容器14上に位置させた後、プランジャ押し込みプレート68を前進させて、シリンジ12のプランジャロッド13bの押圧面13cの上方に位置させる(図5に示す状態)。
【0036】
ロボット4のハンド4aに取り付けられたシリンジ用グリッパ86でシリンジ12をグリップした状態で、昇降用サーボシリンダ64の作動を作動させてプランジャ押し込みプレート68を下降させ、押圧面13cを押圧して、シリンジ12のプランジャロッド13bを押し下げる。プランジャ13cの押圧によってシリンジ12内のガスケット13aが下降し、シリンジ12内に吸引されていた薬液が培地容器14内に注入される。
【0037】
内部に収容していた薬液を放出して空になったシリンジ12は、前記シリンジ用グリッパ86に保持されたままリジェクトボックス22aに移されて廃棄される。また、シリンジ12から薬液が注入された培地容器14は、ロボット4のハンド4aに取り付けられた培地容器用グリッパ78に把持されて再び培地容器用キャッパ・デキャッパ30に戻される。この培地容器用キャッパ・デキャッパ30のキャッピングヘッド70が、先に培地容器14から取り外したキャップ14aを保持しており、ロボット4が培地容器14を上昇させて、その上端のキャップ装着部を上方のキャッピングヘッド70に保持されているキャップ14aに嵌合させる。続いてモーター76によってキャッピングヘッド70を回転させてキャップ14aを培地容器14のキャップ装着部にねじ込み、培地容器14内を密封する。
【0038】
内部に検査用の薬液を注入され、キャップ14aが装着された培地容器14は、ロボット4の培地容器用グリッパ78に把持されたまま、前記開閉扉6の前に置かれているトレイ16の培地容器14を載せるスペース18に置かれる。
【0039】
一方、固定・反転装置26の保護容器固定グリッパ44に保持されていた保護容器8は、ロボット4の保護容器用グリッパ40によってグリップされて保護容器キャッパ・デキャッパ24に移送され、前記吸着パッド38の下方に位置された後、シリンダ34の作動によって吸着パッド38が下降して再びキャップ8aが装着される。その後、排出コンベヤ32に載置され、無菌チャンバー2から排出される。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施例に係るシリンジのプランジャ位置補正装置を備えた培養検査装置の全体の構成を示す平面図である。
【図2】保護容器用キャッパ・デキャッパの側面図である。
【図3】固定・回転装置の正面図である。(実施例1)
【図4】固定・回転装置の平面図である。
【図5】注入ステーションの側面図である。
【図6】培地容器用キャッパ・デキャッパの側面図である。
【図7】保護キャップ外し機構の側面図である。
【図8】シリンジのガスケット位置補正装置の側面図である。
【図9】固定・回転装置の動作を順次説明する図である。
【符号の説明】
【0041】
4 針突き刺し手段(ロボット)
8 第1容器(保護容器)
10 第2容器(バイアル)
10a 液体
12 吸引手段(シリンジ)
44 容器支持手段
46 センタリング部材
【技術分野】
【0001】
本発明は、バイアル等の検体容器に充填されている液体を採取する液体採取装置に係り、特に、液体が充填された検体容器を保護容器内に収容した状態で、この検体容器から液体を採取する液体採取装置に関するものである。
【背景技術】
【0002】
バイアルなどの検体容器に充填されている液体を採取する場合には、バイアルに液体採取用の針を突き刺して、ポンプまたはシリンジによって吸引して液体を採取するようにしている。例えば、特許文献1には、ロボット室内にロボットを配置し、このロボット室にワーク着脱テーブルを有するストッカー室を結合しており、ロボット室内に処理容器およびポンプ等の処理機材一式が配置されたワークベースを搬入し、ワークベースごとに処理を行う「バイアル等の自動無菌試験操作装置」が記載されている。この特許文献1の装置はロボットにより吸引作業を行うが、検体容器から薬液等の検体を吸引する吸引手段としてポンプを用いており、吸引した検体を他の培養容器に充填するようにした。
【0003】
ところで、前記培養試験が行われる薬液には、人体に対して危険性が高いものが存在しており、このような薬液を検体として扱う場合には、その薬液を充填した検体容器を保護容器内に収容した状態で取り扱うようにしている。例えば、特許文献2に記載された発明では、放射性医薬が充填されたバイアルを、被爆を防ぐため、鉛製の容器内に収容している。
【特許文献1】特許第3684250号公報(第4−12頁、図1)
【特許文献2】特表2005−531334号公報(第7−13頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0004】
前記のように保護容器(鉛製容器)内に検体容器(バイアル)を収容している場合には、検体容器内の液体の採取作業を行う際にも、検体容器を保護容器内に収容したままで行う。通常検体容器は保護容器に対してクリアランスを有する状態で収容されており、保護容器を外部から保持して位置決めを行っても、内部に収容されている検体容器は位置決めされていない状態である。バイアルは小さいものも多く、針を刺す箇所も非常に狭い範囲となるので、バイアルを正確に位置決めしておかないと、液採取用の針を刺す際にミスが発生するおそれがある。
【課題を解決するための手段】
【0005】
本発明は、天面が開放した第1容器の内部に収容された第2容器に充填されている液体を採取する液体採取装置において、前記第1容器を支持する容器支持手段と、前記第2容器に液体採取用の針を刺す針突き刺し手段と、突き刺した採取用の針を介して第2容器から液体を吸引採取する吸引手段とを備え、さらに、前記容器支持手段の上方に、第2容器のセンタリングを行うセンタリング部材を昇降可能に設け、液体採取を行う際に、このセンタリング部材を下降させて第1容器内で第2容器の位置決めを行うことを特徴とするものである。
【0006】
また、請求項2に記載の発明は、前記容器支持手段とセンタリング部材とを一体的に倒立させる倒立機構を設け、倒立させた第2容器から液体を採取することを特徴とするものである。
【0007】
さらに、請求項3に記載の発明は、前記針突き刺し手段はロボットであることを特徴とするものである。
【発明の効果】
【0008】
本発明の液体採取装置は、第1容器内に収容した第2容器を、センタリング部材によって位置決めして液体の採取を行うようにしたので、小さいバイアルであっても液採取用の針を確実に突き刺すことができる。
【発明を実施するための最良の形態】
【0009】
液体が充填された第2容器を天面が開放された第1容器内に収容し、第1容器を保持する容器保持手段の上方に設けたセンタリング部材で、第2容器を第1容器内で位置決めした状態で、第2容器に液体採取用の針を突き刺し、この採取用の針を介して第2容器内の液体を吸引して採取するという構成で、液体採取用の針を第2容器に確実に突き刺すという目的を達成する。
【実施例1】
【0010】
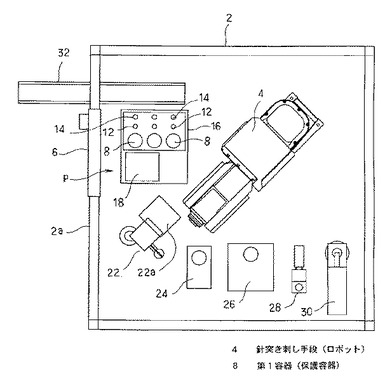
以下、図面に示す実施例により本発明を説明する。図1は本発明の一実施例に係る液体採取装置を備えた培養試験装置の全体の構成を示す平面図である。この装置は、無菌チャンバー2内に作業ロボット4が設置され、このロボット4の作業範囲内にキャッパ等の各種処理手段が配置され、検体容器(この実施例ではバイアル)内に充填されている薬液をシリンジによって採取し、この採取した薬液を培地容器内に注入するようになっている。なお、この実施例の無菌チャンバー2は、天井から無菌エアを吹き出して内部の清浄環境を維持しているが、完全な無菌状態を維持したチャンバーである必要はない。また、作業ロボット4には、後に順次説明するように、バイアルを収容した保護容器を把持する保護容器用グリッパ、シリンジの円筒部を把持するシリンジ用グリッパ、あるいはシリンジのプランジャロッドを押圧するプレート等各種の作業を行うためのグリッパやプレート類が選択可能に備えられている。
【0011】
無菌チャンバー2の一方の壁面(図2の左側の壁面)2aに容器等の出し入れを行う開閉扉6が設けられている。この開閉扉6の内部側にトレイ置き場Pがあり、薬液が充填され、キャップ付きの保護容器(鉛容器)8内に収容されたたバイアル10(後に説明する図9(f)参照)およびシリンジ12と培地容器14が、供給トレイ16上の所定の位置に起立した状態で保持され、人手によってこの無菌チャンバー2内のトレイ置き場Pに供給される。なお、この供給トレイ16には、後に説明する培地容器14を載せるスペース18が設けられており、薬液が注入された培地容器14が、このトレイ16上に載せられて無菌チャンバー2内から取り出される。なお、請求項1の第1容器がこの実施例の保護容器10であり、第2容器がバイアル10である。また、シリンジ12が液体を吸引する吸引手段である。
【0012】
この実施例で使用されるシリンジ12について、図5により簡単に説明する。シリンジ12は、円筒部12aの一端に注射針(液体採取用の針)11aを取り付ける小径部12bが、そして、他端のガスケット13aを挿入する側の開口部にフランジ12cが形成されている。前記小径部12bに、保持カップ11bを介して注射針11aが取り付けられる。さらに、その外側から保護キャップ20が被せられる(図7参照)。フランジ12c側の開口部から円筒部12a内に挿入されたガスケット13aには、プランジャロッド13bが連結されており、このプランジャロッド13bの押圧面13cを操作することによって、ガスケット13aをシリンジ12の円筒部12a内で進退動させて、円筒部12a内に薬液を吸引し、また、その薬液を放出することができる。
【0013】
無菌チャンバー2内には、図1の左側から順に、シリンジ12の保護キャップ20を外す保護キャップ外し機構22、前記バイアル10の保護容器である鉛容器8のキャップ8a(図2参照)を外し、またバイアル10からの薬液の採取後にそのキャップ8aを装着する保護容器用キャッパ・デキャッパ24、保護容器8内に収容されているバイアル10およびシリンジ12を固定し、一体的に反転させて倒立状態にする固定・回転装置26、シリンジ12によってバイアル10から採取した薬液を、培地容器14内に注入する注入ステーション28、培地容器14のキャップ14a(図6参照)を外し、また、薬液をこの培地容器14内に注入した後に前記キャップ14aを装着する培地容器用キャッパ・デキャッパ30が配置されている。さらに、無菌チャンバー2内の、図1の上方の角には、バイアル10からの薬液採取作業が終了した保護容器8を無菌チャンバー2の外部に搬出する保護容器排出コンベヤ32が設置されている。
【0014】
前記供給トレイ16には、保護容器8を起立した状態で保持する保護容器保持孔、シリンジ12を注射針11aを下方に向けた状態で挿入して保持するシリンジ保持孔、培地容器14を起立した状態で挿入して保持する培地容器保持孔が、それぞれ3個ずつ並べて設けられており、各孔にそれぞれ保護容器8、シリンジ12および培地容器14を直立した状態で挿入して保持させる。
【0015】
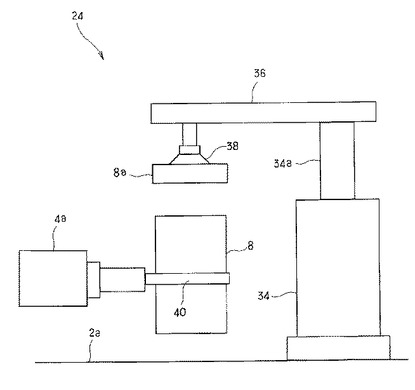
保護容器用キャッパ・デキャッパ24は、図2に示すように、無菌チャンバー2の底面2a上に直立して固定されたシリンダ34のピストンロッド34aの上端に、水平な昇降ヘッド36が固定され、この昇降ヘッド36の先端部寄りに下向きの吸着パッド38が取り付けられている。この吸着パッド38の下方に、前記作動ロボット4のハンド4aに取り付けられている保護容器用グリッパ40が保持している保護容器8が供給されると、前記シリンダ34の作動によって吸着パッド38が下降し、保護容器8のキャップ8aを吸着する。その後、シリンダ34によって吸着パッド38を上昇させて保護容器8のキャップ8aを上方へ外す(図2に示す状態)。
【0016】
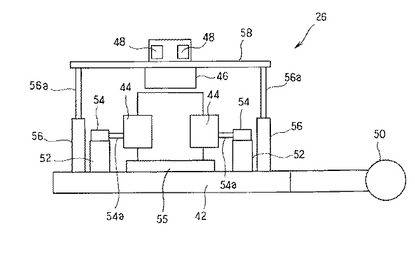
固定・回転装置26は、図3および図4に示すように、可動ベース42上に設置され、保護容器8を把持する一対の保護容器固定グリッパ(第1容器を支持する支持手段)44と、保護容器8内に収容されているバイアル10の保護容器8内での位置決めを行うセンタリングガイド(センタリング部材)46と、このセンタリングガイド46の上方でシリンジ12を保持するシリンジ固定グリッパ48とを備えている。そして、可動ベース42上に設置されたこれら保護容器固定グリッパ44と、センタリングガイド46およびシリンジ固定グリッパ48は、ロータリアクチュエータ50の作動によって、可動ベース42ごと反転されるようになっている。なお、この実施例では、ロータリアクチュエータ50が、保護容器固定グリッパ44およびセンタリングガイド46を180度回転させて倒立状態にする倒立機構を構成している。
【0017】
前記保護容器固定グリッパ44は、可動ベース42上に直立して固定された一対の支柱52上に、それぞれ固定されている一対の水平なエアシリンダ54の、ピストンロッド54aの先端に取り付けられて互いに向かい合っており、両エアシリンダ54の作動によって接近離隔し、接近時には支持台55上に載置された保護容器8を把持し、また離隔時には保護容器8を解放するようになっている。これら保護容器固定グリッパ44は、把持している保護容器8が倒立状態になっても位置がずれないように、確実に固定できるようになっている。
【0018】
センタリングガイド46は、後に説明する図9(g)に示すように環状をしており、前記可動ベース42上に直立して設置された一対のシリンダ56の、ピストンロッド56aの上端間に取り付けられた水平プレート58の下面側に固定されている。このセンタリングガイド46は、保護容器8が供給される時には、図3に示すように水平プレート58とともに上昇し、可動ベース42がロータリアクチュエータ50によって回転する際には、下降して保護容器8内に収容されているバイアル10の位置決めを行う。水平プレート58には、前記環状のセンタリングガイド46の中央の円形穴46aに連通する貫通穴58a(図9(a)参照)が形成されており、この貫通穴58a内をシリンジ12の先端に取り付けられた液体採取用の針11aが挿通される。
【0019】
シリンジ固定グリッパ48は、開閉用シリンダ60によって開閉する一対のロッド60aの先端に取り付けられており、開閉用シリンダ60の作動により接近離隔することによってシリンジ12を把持し、また解放する。これら両グリッパ48は前記水平プレート58の外側からその上方に向かって伸びており、互いに接近してシリンジ12を把持した時には、シリンジ12の中心が、前記センタリングガイド46の中心に位置するようになっている。
【0020】
前記固定・回転装置26に隣接して、注入ステーション28が配置されている。この注入ステーション28には、図5に示すように、培地容器14を保持する培地容器保持グリッパ62と、シリンジ12のプランジャロッド12bの押圧面13cを押圧してシリンジ12内に収容されている薬液を培地容器14に注入する注入機構が設けられている。培地容器保持グリッパ62は、前記無菌チャンバー2の底面2aに固定された支柱62a上に取り付けられており、培地容器14を直立した状態でグリップする。注入機構は、前記底面2a上に直立して配置された昇降用サーボシリンダ64と、このサーボシリンダ64のピストンロッド64aの上端に取り付けられた水平シリンダ66と、この水平シリンダ66のピストンロッド66aの先端に取り付けられて水平方向に進退動するプランジャ押し込みプレート68を備えている。
【0021】
さらに、図1の最も右端側には、培地容器14のキャップ14aを外し、シリンジ12から薬液を注入した後、このキャップ14aを再び培地容器14に装着する培地容器用キャッパ・デキャッパ30が配置されている(図6参照)。この実施例の培地容器14は回転式のキャップ14aが装着されているので、この培地用キャッパ・デキャッパ30は回転可能なキャッピングヘッド70を備えている。直立した支柱69上に固定された水平な支持体72に、下端にキャッピングヘッド70が設けられた回転軸74が回転自在に支持され、モーター76の駆動によりこのキャッピングヘッド70を正逆回転させることにより、培地容器14のキャップ14aを外し、また、キャップ14aを装着する。この培地容器用キャッパ・デキャッパ30では、前記作業ロボット4のハンド4aに取り付けられた培地容器用グリッパ78によって培地容器14をグリップして、前記キャッピングヘッド70の下方に移動させ、さらに上昇させて、培地容器14のキャップ14aをキャッピングヘッド70に係合させ、その後、キャッピングヘッド70を回転させることによりキャップ14aを外す。また、キャッピングヘッド70を逆回転させることによりキャップ14aを培地容器14に螺合する。
【0022】
前記トレイ置き場Pに隣接して配置された保護キャップ外し機構22は、図7に示すように、シリンジ12の先端小径部12bに取り付けられている保持カップ11bを把持するグリッパ80を備えている。この実施例のシリンジ12は、先端小径部12bに注射針11aが保持カップ11bを介して取り付けられており、さらに、この注射針11aおよび保持カップ11bの外側に保護キャップ20が被せられている。この保護キャップ外し機構22では、前記保持カップ把持グリッパ80によって保持カップ11bを把持している状態で、作業ロボット4のハンド4aに取り付けた保護キャップ用グリッパ82によって保護キャップ20をグリップし、保持カップ11bから保護キャップ20を外すようになっている。なお、この保護キャップ外し機構22には、シリンジ12から外した保護キャップ20および使用済みのシリンジ12を排出するリジェクトボックス22aが設けられている。
【0023】
前記構成の培養試験装置の作動について説明する。先ず、供給トレイ16の各保持孔内に、バイアル10を収容した保護容器(鉛容器)8、バイアル10内の薬液を吸引するシリンジ12およびシリンジ12が吸引した薬液を注入される培地容器14を、それぞれ挿入して保持させる。無菌チャンバー2の開閉扉6を人手で開けてこの供給トレイ16を無菌チャンバー2内に挿入する。
【0024】
バイアル10が収容されキてャップ8aが被せられている保護容器8を、作業ロボット4の保護容器用グリッパ40で把持して供給トレイ16から取り出し、保護容器キャッパ・デキャッパ24へ移送して吸着パッド38の下方に位置させる。そこで直立したシリンダ34を作動させて昇降ヘッド36を下降させ、その下面に取り付けられている吸着パッド38を、保護容器8のキャップ8aの上面に当接させてキャップ8aを吸着する。キャップ8aを吸着した後、シリンダ34の作動によって吸着パッド38を上昇させて保護容器8のキャップ8aを外す(図2に示す状態)。外されたキャップ8aは、そのまま吸着パッド38に保持される。
【0025】
キャップ8aが外された保護容器8を、作業ロボット4の保護容器用グリッパ40で把持したまま、隣の固定・回転装置26に移動させ、両側の保護容器固定グリッパ44間の支持台55上に載せる。その後、両側の水平シリンダ54を作動させて両保護容器固定グリッパ44を接近させ、保護容器8を両側からグリップする。
【0026】
前記固定・回転装置で保護容器8を離した作業ロボット4は、次に、培地容器用グリッパ78(図6参照)によって供給トレイ16上の培地容器14を把持して取り出す。そして、取り出した培地容器14を培地容器キャッパ・デキャッパ30へ移送し、キャッピングヘッド70の下方に位置させる。その後、培地容器14を上昇させてそのキャップ14aをキャッピングヘッド70に係合させる。モータ76によってキャッピングヘッド70を回転させて培地容器14のキャップ14aを外す。このキャップ14aは、そのままキャッピングヘッド70に保持される。続いて、キャップ14aが外された培地容器14を下降させ、隣接する注入ステーション28(図5参照)に移動させる。この注入ステーション28には、培地容器保持グリッパ62が設けられており、この培地容器保持グリッパ62が、作業ロボット4の培地容器用グリッパ78から培地容器14を受け取って保持する。
【0027】
シリンジ12は、供給トレイ16のシリンジ保持孔内に液体採取用の針11aを下方に向けた状態で保持されており、フランジ12cの高さは同一になっている。ところが、シリンジ12内のガスケット13aの位置は必ずしも同一ではなく、異なっている場合がある。従って、プランジャロッド13bの上端の押圧面13cの高さも一律ではない。そこで、供給トレイ16からシリンジ12を取り出して移動させる前に、プランジャロッド12bの押圧面13cの高さ、つまりシリンジ12内のガスケット13aの位置を同一にするように補正を行う。補正後のガスケット13aの位置は、シリンジ12の円筒部12aの最も下端まで押し込んだ位置であり(図8の一番右側のシリンジ12参照)、この位置を零点と呼ぶことにする。
【0028】
作業ロボット4は、ガスケット13aが零点にある時のプランジャロッド12bの押圧面13cの位置と、供給トレイ16側の基準位置S(この実施例ではトレイ16の上面)との距離Lを記憶している。また、ガスケット13aが最も高い位置にある時の押圧面と基準位置Sとの距離+所定距離αも記憶している。そして、零点補正を行う際には、作業用ロボット4のハンド4aに取り付けられている補正用プレート84を使用する。ロボット4は、補正用プレート84を、ガスケット13aがシリンジ12内で最も高い位置にある時のプランジャロッド12bの押圧面13c(図8の左端のシリンジ12参照)の位置よりも上方(最も高い位置にある時の押圧面13cよりもαだけ上方)に移動させ、下降して押圧面13cの位置と前記基準位置Sとの距離がLとなるように、プランジャロッド13bを下降させてガスケット13aを前記零点まで押し込む。このようにロボット4の動作によって、全てのシリンジ12のガスケット13aを零点位置に揃えるようにしたので、常に正確な量の薬液を採取することができる。また、人手を介さないので、シリンジ12の無菌状態を損なうこともない。
【0029】
前述のようにガスケット13aを最も内部まで押し込んで同一の高さに揃えたシリンジ12は、供給トレイ16から取り出されて保護キャップ外し機構22に移動される(図7参照)。保護キャップ外し機構22に送られたシリンジ12は、保持カップ把持グリッパ80に引き渡される。この保持カップ把持グリッパ80は、シリンジ12の先端小径部12bに液体採取用の注射針11aを取り付けるための保持カップ11bをグリップする。注射針11aを下方に向けた状態で保持カップ把持グリッパ80に保持されているシリンジ12の下方から、ロボットハンド4aに取り付けられている保護キャップ用グリッパ82を接近させ、シリンジ12の最も下端に位置している保護キャップ20を把持する。保護キャップ20を把持した保護キャップ用グリッパ82を下降させることにより、シリンジ12から保護キャップ20を外す。シリンジ12から外した保護キャップ20は、リジェクトボックス22aに廃棄される。
【0030】
保護キャップ20を外したシリンジ12を、ロボット4のシリンジ用グリッパ86(図5参照)によってグリップして固定・回転装置26に移動させる。固定・回転装置26にはシリンジ固定グリッパ48が設けられており、シリンジ12は、ロボット4によってバイアル10に突き刺された後、このシリンジ固定グリッパ48に引き渡される。
【0031】
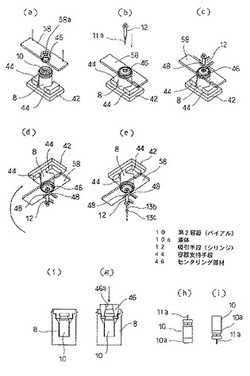
この固定・回転装置26の動作について、図9により説明する。前記のようにすでにこの固定・回転装置26に送られて保護容器固定グリッパ44に把持されている保護容器8の上方に、センタリングガイド46が設けられており、両シリンダ56の作動により水平プレート58とともにセンタリングガイド46を下降させ(図9(a)参照)、センタリングガイド46を保護容器8の内部に挿入する。保護容器8はキャップ8aが外された状態で、内部にバイアル10が収容されており(図9(f)参照)、保護容器8の開口とバイアル10の上部との間に環状のセンタリングガイド46を挿入して、保護容器8内でのバイアル10の位置決めを行う(図9(g)参照)。
【0032】
保護容器8内でバイアル10の位置決めをした後、保護キャップ外し機構22で保護キャップ20を外したシリンジ12を、ロボット4のシリンジ用グリッパ86が保持してこの固定・回転装置26まで移動させ、前記センタリングガイド46および水平プレート58の貫通孔の中心部の上方から垂直に下降させ(図9(b)参照)、シリンジ12の針11aをバイアル10の上面のゴム栓に突き刺して、その先端を僅かに内部に突出させる。このようにセンタリングガイド46を下降させて保護容器8内のバイアル10を位置決めした状態で、シリンジ12の液体採取用の針11aを突き刺すようにしたので、バイアル10のサイズが小さく、針11aを刺すゴム栓のスペースが狭い場合でも、確実に突き刺すことができる。その後、開閉用シリンダ60を作動させてシリンジ固定グリッパ48によりシリンジ12の円筒部12aをグリップして固定する(図9(c)参照)。なお、この実施例では、作業ロボット4がバイアル10に液体採取用の針11aを突き刺す突き刺し手段を構成している。
【0033】
前記のように保護容器8を保護容器固定グリッパ44によって把持し、この保護容器8内に収容されているバイアル10をセンタリングガイド46によって位置決めし、さらに、バイアル10のゴム栓に注射針11aを差し込んだシリンジ12をシリンジ固定グリッパ48によって把持した状態で、ロータリアクチュエータ50の作動によって可動ベース42を180度回転させることにより、これら保護容器8、バイアル10およびシリンジ12を一体として反転させて倒立状態にする(図9(d)参照)。バイアル10を正立させた状態でそのゴム栓にシリンジ12の液体採取用の針12aを突き刺すと、図9(h)に示すように、バイアル10内部の薬液10aはバイアル10の下部に溜まり、シリンジ12の針11aは上方の蓋から内部側に僅かに先端を望ませているだけなので、薬液を吸引することはできないが、反転させて倒立状態にすると、図9(j)に示すように、バイアル10のゴム栓側に薬液が溜まるので、シリンジ12により薬液を吸引することが可能になる。
【0034】
保護容器8内に収容されているバイアル10とシリンジ12とが一体的に反転されて倒立状態になった後、ロボット4のグリッパ(図示せず)によってシリンジ12のプランジャロッド13bを引き下げる(図9(e)参照)。プランジャロッド13bとともに、シリンジ12内のガスケット13aが下降し、バイアル10内の薬液10aがシリンジ12内に吸引される。バイアル10からの薬液の吸引を終了した後、ロボット4のグリッパがプランジャロッド13bを離し、続いて、ロータリアクチュエータ50によって可動ベース42を逆方向に180度回転させて、保護容器8内に収容されたバイアル10およびシリンジ12を反転させて正立状態に戻す。
【0035】
薬液を吸引して内部に収容したシリンジ12は、作業ロボット4のシリンジ保持用グリッパ86に把持されてバイアル10から抜き取られ、固定・反転装置26から注入ステーション28に移される。注入ステーション28では、キャップ14aを外された培地容器14が、注入ステーション28に設置されている培地容器保持グリッパ62に把持されて待機している。ロボット4のシリンジ保持用グリッパ86に把持されたシリンジ12は、培地容器保持グリッパ62に直立した状態で把持されている培地容器14の上方開口部から注射針11aが挿入される。注入ステーション28には、プランジャ押し込みプレート68が設けられており、シリンジ12を培地容器14の上方に移動させる際には、水平シリンダ66によって後退させておき、シリンジ12を培地容器14上に位置させた後、プランジャ押し込みプレート68を前進させて、シリンジ12のプランジャロッド13bの押圧面13cの上方に位置させる(図5に示す状態)。
【0036】
ロボット4のハンド4aに取り付けられたシリンジ用グリッパ86でシリンジ12をグリップした状態で、昇降用サーボシリンダ64の作動を作動させてプランジャ押し込みプレート68を下降させ、押圧面13cを押圧して、シリンジ12のプランジャロッド13bを押し下げる。プランジャ13cの押圧によってシリンジ12内のガスケット13aが下降し、シリンジ12内に吸引されていた薬液が培地容器14内に注入される。
【0037】
内部に収容していた薬液を放出して空になったシリンジ12は、前記シリンジ用グリッパ86に保持されたままリジェクトボックス22aに移されて廃棄される。また、シリンジ12から薬液が注入された培地容器14は、ロボット4のハンド4aに取り付けられた培地容器用グリッパ78に把持されて再び培地容器用キャッパ・デキャッパ30に戻される。この培地容器用キャッパ・デキャッパ30のキャッピングヘッド70が、先に培地容器14から取り外したキャップ14aを保持しており、ロボット4が培地容器14を上昇させて、その上端のキャップ装着部を上方のキャッピングヘッド70に保持されているキャップ14aに嵌合させる。続いてモーター76によってキャッピングヘッド70を回転させてキャップ14aを培地容器14のキャップ装着部にねじ込み、培地容器14内を密封する。
【0038】
内部に検査用の薬液を注入され、キャップ14aが装着された培地容器14は、ロボット4の培地容器用グリッパ78に把持されたまま、前記開閉扉6の前に置かれているトレイ16の培地容器14を載せるスペース18に置かれる。
【0039】
一方、固定・反転装置26の保護容器固定グリッパ44に保持されていた保護容器8は、ロボット4の保護容器用グリッパ40によってグリップされて保護容器キャッパ・デキャッパ24に移送され、前記吸着パッド38の下方に位置された後、シリンダ34の作動によって吸着パッド38が下降して再びキャップ8aが装着される。その後、排出コンベヤ32に載置され、無菌チャンバー2から排出される。
【図面の簡単な説明】
【0040】
【図1】本発明の一実施例に係るシリンジのプランジャ位置補正装置を備えた培養検査装置の全体の構成を示す平面図である。
【図2】保護容器用キャッパ・デキャッパの側面図である。
【図3】固定・回転装置の正面図である。(実施例1)
【図4】固定・回転装置の平面図である。
【図5】注入ステーションの側面図である。
【図6】培地容器用キャッパ・デキャッパの側面図である。
【図7】保護キャップ外し機構の側面図である。
【図8】シリンジのガスケット位置補正装置の側面図である。
【図9】固定・回転装置の動作を順次説明する図である。
【符号の説明】
【0041】
4 針突き刺し手段(ロボット)
8 第1容器(保護容器)
10 第2容器(バイアル)
10a 液体
12 吸引手段(シリンジ)
44 容器支持手段
46 センタリング部材
【特許請求の範囲】
【請求項1】
天面が開放した第1容器の内部に収容された第2容器に充填されている液体を採取する液体採取装置において、
前記第1容器を支持する容器支持手段と、前記第2容器に液体採取用の針を刺す針突き刺し手段と、突き刺した採取用の針を介して第2容器から液体を吸引採取する吸引手段とを備え、さらに、前記容器支持手段の上方に、第2容器のセンタリングを行うセンタリング部材を昇降可能に設け、液体採取を行う際に、このセンタリング部材を下降させて第1容器内で第2容器の位置決めを行うことを特徴とする液体採取装置。
【請求項2】
前記容器支持手段とセンタリング部材とを一体的に倒立させる倒立機構を設け、倒立させた第2容器から液体を採取することを特徴とする請求項1に記載の液体採取装置。
【請求項3】
前記針突き刺し手段はロボットであることを特徴とする請求項1または請求項2に記載の液体採取装置。
【請求項1】
天面が開放した第1容器の内部に収容された第2容器に充填されている液体を採取する液体採取装置において、
前記第1容器を支持する容器支持手段と、前記第2容器に液体採取用の針を刺す針突き刺し手段と、突き刺した採取用の針を介して第2容器から液体を吸引採取する吸引手段とを備え、さらに、前記容器支持手段の上方に、第2容器のセンタリングを行うセンタリング部材を昇降可能に設け、液体採取を行う際に、このセンタリング部材を下降させて第1容器内で第2容器の位置決めを行うことを特徴とする液体採取装置。
【請求項2】
前記容器支持手段とセンタリング部材とを一体的に倒立させる倒立機構を設け、倒立させた第2容器から液体を採取することを特徴とする請求項1に記載の液体採取装置。
【請求項3】
前記針突き刺し手段はロボットであることを特徴とする請求項1または請求項2に記載の液体採取装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−159464(P2007−159464A)
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願番号】特願2005−359051(P2005−359051)
【出願日】平成17年12月13日(2005.12.13)
【出願人】(000253019)澁谷工業株式会社 (503)
【Fターム(参考)】
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願日】平成17年12月13日(2005.12.13)
【出願人】(000253019)澁谷工業株式会社 (503)
【Fターム(参考)】
[ Back to top ]