
液晶露光装置及び露光処理方法
【課題】フォトマスクの変形を補正することによって転写精度を向上させる液晶露光装置を提供する。
【解決手段】ステージ機構42,43と、フォトマスク71を支持するフォトマスク支持フレームと、フォトマスク支持フレームの歪みを検出する歪み検出手段と、フォトマスク71の変形を補正する補正手段と、フォトマスク71の変形パターンと歪みの分布とが対応して記憶されている変形パターン記憶手段と、歪み検出手段によって検出された歪み分布と、変形パターン記憶手段から読み出した変形パターンの歪み分布とを比較して、フォトマスク71の変形パターンを推定し、推定した変形パターン、及び、歪み検出手段によって検出された歪み量に基づいて、フォトマスク71の変形を打ち消す補正量を算出し、当該補正量に対応する電圧を補正手段に対して出力する制御手段と、を備える。
【解決手段】ステージ機構42,43と、フォトマスク71を支持するフォトマスク支持フレームと、フォトマスク支持フレームの歪みを検出する歪み検出手段と、フォトマスク71の変形を補正する補正手段と、フォトマスク71の変形パターンと歪みの分布とが対応して記憶されている変形パターン記憶手段と、歪み検出手段によって検出された歪み分布と、変形パターン記憶手段から読み出した変形パターンの歪み分布とを比較して、フォトマスク71の変形パターンを推定し、推定した変形パターン、及び、歪み検出手段によって検出された歪み量に基づいて、フォトマスク71の変形を打ち消す補正量を算出し、当該補正量に対応する電圧を補正手段に対して出力する制御手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、フォトマスクに形成されたパターンをガラス基板に転写する液晶露光装置及び露光処理方法に関する。
【背景技術】
【0002】
液晶パネルの製造では、プロキミシティ露光方式の液晶露光装置が広く用いられている。プロキミシティ露光方式では、フォトレジスト膜などが形成されたガラス基板とフォトマスクとの間を1mm以内に近づけ、露光用ランプからの光をフォトマスクに照射し、当該フォトマスクに形成されたパターンをガラス基板に転写する。
【0003】
また、プロキミシティ露光方式においては、フォトマスクとガラス基板の平坦度及び平行度が転写精度に大きく影響する。すなわち、転写時においてフォトマスクとガラス基板とをそれぞれ平坦とし、かつ、フォトマスクとガラス基板とを平行とすることにより、高い転写精度を実現することができる。
なお、近年は、スマートフォン、タブレットパソコンなどの普及により、中小型の高解像度パネルの需要が高まっており、液晶露光装置の転写精度をより高めることが求められている。
【0004】
特許文献1には、基板(ガラス基板)を保持するチャックを多数の点で支持しながら、チャックに保持された基板の位置決め、及び、前記基板とフォトマスクとのギャップ制御を行う、プロミキシティ露光方式の露光装置(液晶露光装置)について記載されている。当該技術によれば、基板とフォトマスクとのギャップを制御することによって、露光精度を向上させることができる。
【0005】
また、特許文献2には、マスク(フォトマスク)の周縁部を保持することで当該マスクの上方に気密室を形成するマスクホルダを備え、当該マスクホルダにマスク吸着路と、エア吸引路などが形成されたマスク保持装置について記載されている。当該技術によれば、マスク吸着路を介して気密室からエアを吸引することによってマスクを吸着保持し、かつ、エア吸引路を介して気密室内のエアを吸引することによって、マスクの自重によるたわみを防止することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−235019号公報
【特許文献2】特開2003−131388号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載の技術では、基板(ガラス基板)の平坦度を高めることができるものの、外乱によってフォトマスクにねじれが生じた場合には、基板とフォトマスクとが平行にならないという問題がある。つまり、フォトマスクにねじれが生じた場合には、フォトマスクの各点と、これに対応する基板の各点との距離に差が生じて、転写精度が低下してしまうという問題がある。
【0008】
なお、前記した「外乱」として、例えば、基板(ガラス基板)を移動させるステージの変形や、露光装置(液晶露光装置)が設置されている床の経時的な変化や、露光装置が設置されている室内での局部的な温度変化などが挙げられる。
フォトマスク支持フレームの高さを調整する高さ調整機構が前記のような外乱を受けると、当該高さ調整機構の支持点の位置関係がくずれ、フォトマスク支持フレームにねじれが生じてしまう。そうすると、フォトマスク支持フレームの前記ねじれに追従してフォトマスクもねじれることとなる。
【0009】
また、特許文献2に記載の技術では、エア吸引路を介して気密室内のエアを吸引することによってマスク(フォトマスク)の自重によるたわみを補正できるものの、マスクがねじれた場合に、当該ねじれを補正することができないという問題がある。つまり、マスクがねじれた場合において気密室の気圧を低下させても、ねじれが残ったままマスクが上方(気密室側)に吸引されることになる。そうすると、前記した特許文献1の場合と同様に、マスクのねじれによって転写精度が低下してしまうという問題がある。
【0010】
ちなみに、「たわみ」とは、部材が外力の作用によって湾曲した際、荷重を受ける前の部材の軸線と直角方向に変位することを指す。また、「ねじれ」とは、弾性体の一端を固定し、他端に、軸方向に力のモーメントをもつ偶力を働かせたとき起こる変形を指す。
なお、以下の記載において「変形」とは、前記の「たわみ」及び「ねじれ」を含むものとする。
【0011】
そこで、本発明は、転写精度が向上された液晶露光装置及び露光処理方法を提供することを課題とする。
【課題を解決するための手段】
【0012】
前記課題を解決するために、本発明に係る液晶露光装置は、ガラス基板をフォトマスクに対して相対的に移動させるステージ機構と、前記フォトマスクを支持するフォトマスク支持フレームと、前記フォトマスク支持フレームの各位置での歪みを検出する複数の歪み検出手段と、前記フォトマスクの変形を補正する補正手段と、前記歪み検出手段の各位置での歪み分布と、前記フォトマスクの変形パターンと、が対応して記憶されている変形パターン記憶手段と、前記ステージ機構を駆動させて前記ガラス基板を転写位置に移動させ、前記歪み検出手段によって検出された歪み分布と、前記変形パターン記憶手段から読み出した変形パターンの歪み分布とを比較して、前記フォトマスクの変形パターンを推定し、推定した前記変形パターン、及び、前記歪み検出手段によって検出された歪み量に基づいて、前記フォトマスクの変形を打ち消す補正量を算出し、当該補正量に対応する電圧を前記補正手段に対して出力する制御手段と、を備えることを特徴とする。
【0013】
また、本発明に係る露光処理方法は、ステージ機構を駆動させてガラス基板を転写位置に移動させるステップと、フォトマスクを支持するフォトマスク支持フレームの各位置での歪みを、複数の歪み検出手段を用いて検出するステップと、複数の前記歪み検出手段によって検出された歪み分布と、変形パターン記憶手段から読み出した変形パターンの歪み分布とを比較して、前記フォトマスクの変形パターンを推定するステップと、推定した前記変形パターン、及び、前記歪み検出手段によって検出された歪み量に基づいて、前記フォトマスクの変形を打ち消す補正量を算出するステップと、当該補正量に対応する電圧を、前記フォトマスクの変形を補正する補正手段に対して出力するステップと、有することを特徴とする。
【発明の効果】
【0014】
本発明により、転写精度が向上された液晶露光装置及び露光処理方法を提供することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1実施形態に係る液晶露光装置の外観斜視図である。
【図2】液晶露光装置の側面図(一部断面透視図)である。
【図3】フォトマスク支持フレームに設置された歪み検出手段と、補正手段の設置位置を示す外観斜視図である。
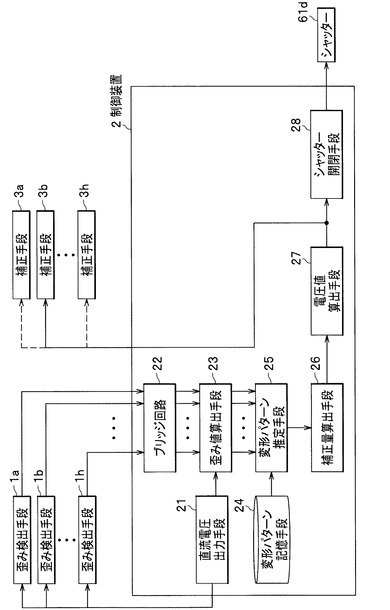
【図4】歪み検出手段と、制御装置と、補正手段との関係を示すブロック図である。
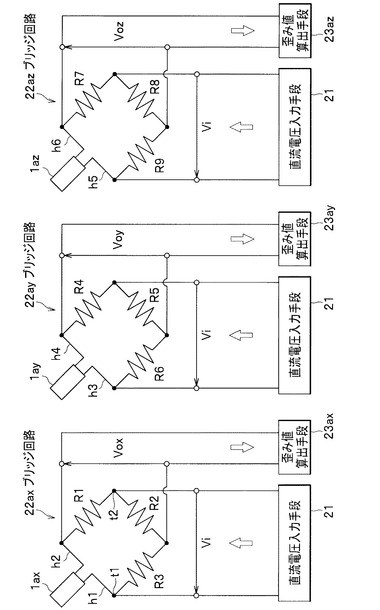
【図5】歪み検出手段と、制御装置の直流電圧出力手段・ブリッジ回路・歪み値算出手段との関係を示す説明図である。
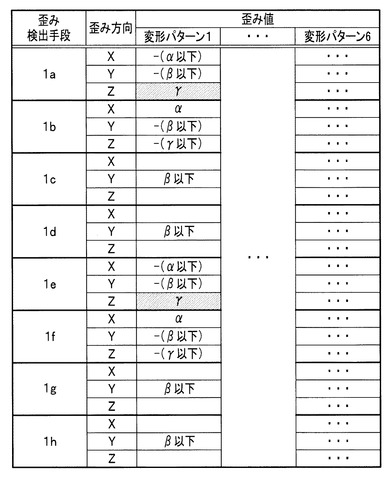
【図6】制御装置の変形パターン記憶手段に記憶されている変形パターンテーブルを示す図である。
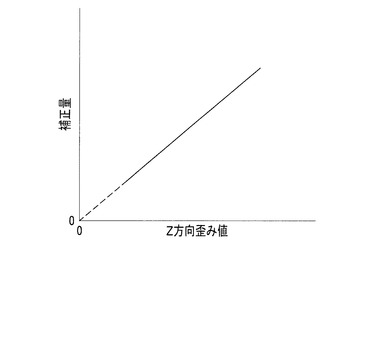
【図7】Z方向歪み値と補正量との関係を示すグラフである。
【図8】補正手段をフォトマスク支持フレームの上面に対して垂直方向に伸縮自在に設置した場合の断面図であり、(a)はフォトマスク支持フレームが変形した場合であり、(b)は、補正手段によって前記変形を補正した場合である。
【図9】補正手段をフォトマスク支持フレームの内側面に対して垂直方向に伸縮自在に設置した場合の断面図であり、(a)はフォトマスク支持フレームが変形した場合であり、(b)は、補正手段によって前記変形を補正した場合である。
【図10】制御装置におけるフォトマスクの変形補正処理の流れを示すフローチャートである。
【図11】本発明の第2実施形態に係る液晶露光装置において、フォトマスク支持フレームに設置された歪み検出手段と、補正手段の設置位置を示す外観斜視図である。
【図12】歪み検出手段と、制御装置の直流電圧出力手段・歪み値算出手段との関係を示す説明図である。
【発明を実施するための形態】
【0016】
本発明の実施形態について、適宜図面を参照しながら詳細に説明する。なお、各図において、共通する部分には同一の符号を付し、重複した説明を省略する。
【0017】
≪第1実施形態≫
<液晶露光装置の構成>
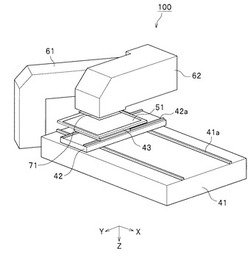
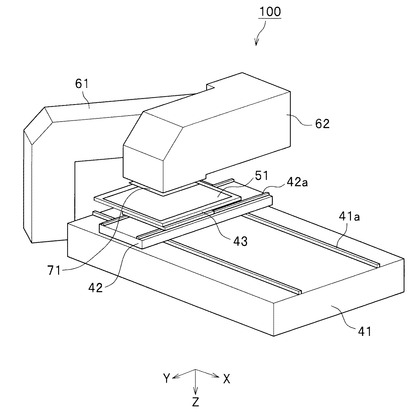
図1は、本発明の第1実施形態に係る液晶露光装置の外観斜視図である。液晶露光装置100は、フォトリソグラフィ技術によりフォトマスク71の微細パターンをガラス基板51上に投影・転写するものである。
図1に示すように、液晶露光装置100は、ベース41と、Xステージ機構42と、Yステージ機構43と、ランプハウス61と、ミラーハウス62と、フォトマスク71と、を備える。
ベース41は、図示しない床面上に設置されており、ベース41の上面には、Xガイドレール41aが対で形成されている。Xステージ42は、ベース41上をXガイドレール41aに沿ってX方向に移動可能となっている。また、Xステージ42の上面には、Yガイドレール42aが対で形成されている。Yステージ43は、Xステージ42上をYガイドレール42aに沿ってY方向に移動可能となっている。
【0018】
なお、Xステージ機構42と、Yステージ機構43とは、後記する制御装置2(図2参照)からの指令によって駆動するアクチュエータ(図示せず)により、それぞれX方向、Y方向に移動可能となっている。そして、当該移動に対応して、Yステージ43上に載置(吸着)されたガラス基板51をX,Y方向に移動させ、所望の転写位置まで移動させることができるようになっている。
ちなみに、ガラス基板51は外部の搬送ロボット(図示せず)によってYステージ43上に載置され、チャック43a(図2参照)によって吸着される。そして、転写が終了すると、チャック43aによる吸着が解除され、ガラス基板51は前記搬送ロボットによってYステージ43から取り上げられる。
【0019】
ランプハウス61は、後記する水銀ランプ61a、集光鏡61b、フライアレンズ61c、シャッター61d(図2参照)などを収容する筐体である。ミラーハウス62は、後記する集光鏡62a、平面鏡62b(図2参照)などを収容する筐体である。
フォトマスク71は、例えば、石英又はガラスなどで構成されており、ガラス基板51に転写するパターン(例えば、電子部品の回路パターン)の原版となるものである。
【0020】
なお、液晶露光装置100は、図1に示す構成の他に、後記する歪み検出手段1、制御装置2、補正手段3、フォトマスク支持フレーム72、高さ調整機構81などを備える(図2参照)。
【0021】
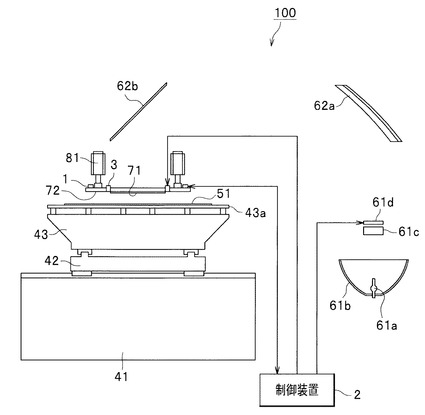
図2は、液晶露光装置の側面図(一部断面透視図)である。前記したように、水銀ランプ61a、集光鏡61b、フライアイレンズ61c、シャッター61dなどが、ランプハウス61(図1参照)内に設置されている。水銀ランプ61a(高輝度放電ランプ)61aから放出された光は、集光鏡61bによって集光され、フライアイレンズ61cを通過して強度分布が均一化される。そして、シャッター61dは、制御装置2からの指令に従って、水銀ランプ61aからの光を通過又は遮断する。
【0022】
また、前記したように、集光鏡62a、平面鏡62bなどがミラーハウス62(図1参照)内に設置されている。集光鏡62a及び平面鏡62bは、フライアイレンズ61cを介して照射された光を反射して、当該光がフォトマスク71に対して垂直に照射されるように設置されている。
【0023】
フォトマスク支持フレーム72は、フォトマスク71を支持するものである。フォトマスク支持フレーム72は、外周フレーム72a(図3参照)と、当該外周フレーム72aと一体に形成された内周フレーム72b(図3参照)と、を備える。ここで、「一体に形成」とは、外周フレーム72aと内周フレーム72bとが別部材ではあるが、溶接やボルト締めなどによって剛に接続されている場合も含む。
なお、フォトマスク支持フレーム72の下面には、図示しないチャックが設置されており、当該チャックの負圧によってフォトマスク71がフォトマスク支持フレーム72に吸着される。
【0024】
高さ調整機構81は、図3に示す外周フレーム72a(図3参照)の隅部A,B,C,D付近の上面にそれぞれ設置され、制御装置2からの指令に従ってフォトマスク71の高さ調整を行う。ちなみに、図3では、高さ調整機構81(図2参照)の図示を省略している。また、高さ調整機構81は、図示しない筐体によって上から支持されている。
【0025】
歪み検出手段1(1a,1b,・・・,1h:図3参照)は、フォトマスク支持フレーム72の外周フレーム72a(図3参照)の上面及び外側面に設置されている。歪み検出手段1は、例えば、金属製の歪みゲージであり、その抵抗値(電気抵抗)が歪みの量に比例して変動するものである。
【0026】
制御装置2は、歪み検出手段1を回路の一部として含むブリッジ回路22(図4参照)を備え、直流電圧を歪み検出手段1に対して出力し、歪み検出手段1の抵抗値の変化から歪み値を算出する。さらに、制御装置2は、歪み値の分布からフォトマスク71の変形パターンを推定して補正量を算出し、当該補正量に対応する電圧を補正手段3に対して出力する。
補正手段3(3a,3b,・・・,3h:図3参照)は、フォトマスク支持フレーム72の内周フレーム72b(図3参照)の内部に設置されている。補正手段3は、例えば、圧電素子(ピエゾ素子)であり、印加される電圧に応じて圧電効果により変形するものである。
【0027】
したがって、制御装置2から電圧が印加されると、補正手段3は当該電圧に応じて変形する。その際、補正手段3はフォトマスク支持フレーム72に密着するように設置されているため、補正手段3の変形に応じてフォトマスク支持フレーム72及びフォトマスク71も変形して、フォトマスク71の変形(ねじれ、たわみなど)が補正される。
【0028】
(1.歪み検出手段)
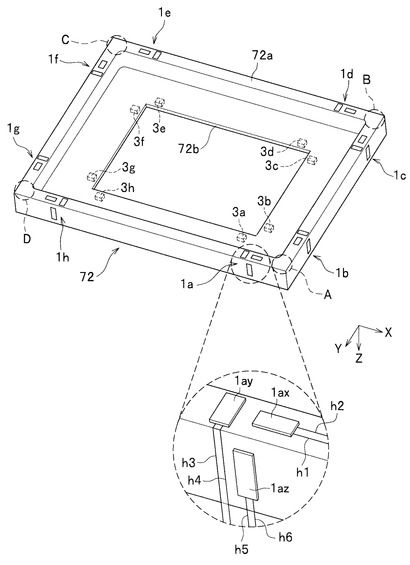
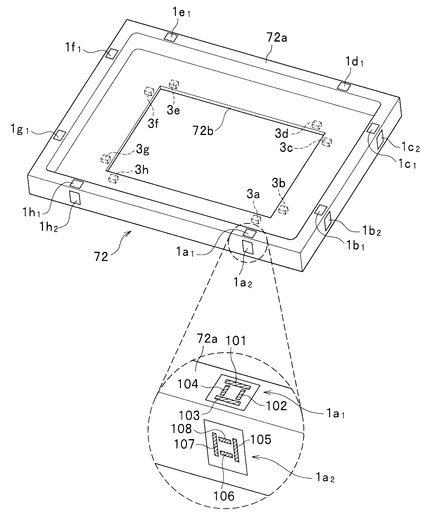
図3に示すように、8組の歪み検出手段1a,1b,・・・,1hが外周フレーム72aの上面及び外側面に設置されている。なお、各歪み検出手段1a,1b,・・・,1hを総称して、歪み検出手段1と称することがあるものとする。
また、フォトマスク71の変形を補正する8個の補正手段3a,3b,・・・,3hが、内周フレーム72bの内部に設置されている。図3に示すように、それぞれの補正手段3のX−Y方向における設置位置は、それぞれの歪み検出手段1のX−Y方向における設置位置に対応している。
なお、各補正手段3a,3b,・・・,3hを総称して、補正手段3と称することがあるものとする。
【0029】
図3の部分拡大図に示すように、歪み検出手段1aは、X方向の歪みを検出する歪み検出手段1ax、Y方向の歪みを検出する歪み検出手段1ay、Z方向の歪みを検出する歪み検出手段1azを有している。
例えば、歪み検出手段1axは、外周フレーム72aの上面のX軸方向と平行に設置されている。そして、歪み検出手段1axは、外周フレーム72aのうち歪み検出手段1axが設置されている箇所がX方向に伸びた場合にはその抵抗値が大きくなり、X方向に縮んだ場合にはその抵抗値が下がるようになっている。歪み検出手段1ay,1azについても前記と同様である。そして、これらの歪み検出手段1ax,1ay,1azで一組の歪み検出手段1aを構成する。
また、他の7組の歪み検出手段1b,・・・,1hについても前記と同様のことがいえる。つまり、外周フレーム72aには、X,Y,Z方向の歪みを検出するための歪み検出手段が8組(つまり、合計24個の歪み検出手段1が)設置されている。
【0030】
また、図3に示すように、外周フレーム72aの四隅である隅部A,B,C,Dをそれぞれ挟むように、二組ずつの歪み検出手段1が設置されている。これは、外周フレーム72aの上面に設置されている高さ調整機構81(図2参照)の支持点の位置関係がくずれた場合、その影響による歪みが隅部A,B,C,D付近で最も大きく生じるからである。つまり、歪み検出手段1を外周フレーム72aの各隅部A,B,C,D付近に設置することによって、フォトマスク支持フレーム72の微少な変形(歪み)をより敏感に検出することができる。
【0031】
(2.制御装置)
図4は、歪み検出手段と、制御装置と、補正手段との関係を示すブロック図である。
制御装置2は、直流電圧出力手段21と、ブリッジ回路22と、歪み値算出手段23と、変形パターン記憶手段24と、変形パターン推定手段25と、補正量算出手段26と、電圧値算出手段27と、シャッター開閉手段28と、を備える。
図4に示すように、直流電圧出力手段21は、図示しない電源から供給される直流電圧を、各歪み検出手段1a,1b・・・,1hに対して出力する。
ブリッジ回路22は、歪み検出手段1を回路の一部として含み、各歪み検出手段1に対応して複数設けられている。そして、ブリッジ回路22は、直流電圧出力手段21から電圧が印加される2端子とは対角線の関係にある2端子間の電圧を増幅し、歪み値算出手段23に対して出力する(図5参照)。
【0032】
歪み値算出手段23は、直流電圧出力手段21及びブリッジ回路22から入力された電圧値に基づいて、フォトマスク支持フレーム72のうち、各歪み検出手段1が設置されている箇所での歪み値を算出し、変形パターン推定手段25に出力する。
変形パターン記憶手段24には、それぞれの歪み検出手段1の設置位置での歪み分布と、フォトマスク71の各変形パターンとが対応して記憶されている。
変形パターン推定手段25は、歪み検出手段1によって検出された歪み値の分布(歪み値算出手段23からの入力値)と、変形パターン記憶手段24から読み出した変形パターンとを比較して、フォトマスク71の変形パターンを推定する。そして、変形パターン推定手段25は、推定した変形パターン及びひずみ検出手段1の歪み値を補正量算出手段26に出力する。
【0033】
補正量算出手段26は、変形パターン推定手段25から入力された変形パターン及びひずみ検出手段1の歪み値に基づいて、フォトマスク71の変形を打ち消す補正量を算出し、当該補正量を電圧値算出手段27に出力する。
電圧値算出手段27は、補正手段3が前記補正量だけ変形するのに必要な電圧値を算出し、その電圧を補正手段3に対して出力する。
【0034】
シャッター開閉手段28は、圧電素子である補正手段3が変形に要するのに必要な時間ΔTを、図示しない記憶手段から読み出す。そして、シャッター開閉手段28は、電圧値算出手段27が補正手段3に対して電圧を出力した時刻t1を基準(時刻0)として、時刻t1から前記時間ΔTが経過したと判断した場合、シャッター61dに対して開指令の信号を出力する。ちなみに、シャッター開閉手段28は、前記時間ΔTに所定の余裕時間を加えた時間が経過した場合に、シャッター61dに対して開指令の信号を出力することとしてもよい。
そして、シャッター61dが開状態となった場合に、制御装置2は、水銀ランプ61aから光を放出させる。
【0035】
次に、制御装置2の各手段22〜27について詳細に説明する。
図5に示すように、例えば、ブリッジ回路22aは、歪み検出手段1ax,1ay,1azにそれぞれ対応して、これらの歪み検出手段を一部に含むブリッジ回路(ホイーストンブリッジ)22ax,22ay,22azを形成している。ちなみに、図5に示すブリッジ回路22axの歪み検出手段1axに接続された配線h1,h2は、制御装置2から出て歪み検出手段1axに接続されている(図3参照)。
【0036】
そして、例えば、ブリッジ回路22axの出力電圧Voxは、図示しない電圧増幅手段によって増幅されて、歪み値算出手段23axに出力される。
同様に、直流電圧出力手段21からブリッジ回路22ay,22azに対してそれぞれ所定の電圧Viが入力され、各出力電圧Voy,Vozが、図示しない電圧増幅手段によって増幅されて、歪み値算出手段23ay,23azに出力される。
【0037】
図4において、歪み値算出手段23は、ブリッジ回路22の各抵抗の抵抗値と、直流電圧出力手段21からの電圧値Vi及びブリッジ回路22からの各電圧値Voに基づいて、フォトマスク支持フレーム72のうち、各歪み検出手段1が設置されている箇所における歪み値を算出する。
ここで、歪み検出手段1の歪み値εは、以下の(式1)で求められる。なお、以下の(式1)において、Rは歪み検出手段1のゲージ抵抗、ΔRは歪み検出手段1が歪みを受けたときの抵抗変化量、Kはゲージ率である。
ε=ΔR/(K・R) ・・・(式1)
【0038】
このようにして、ブリッジ回路22としてホイーストンブリッジを採用することにより、温度変化の影響による検出誤差を少なくすることができる。また、歪み検出手段1の抵抗値の微少な変化を検出し、その抵抗値の変化に基づいて歪み値εを正確に算出することができる。
そして、X方向・Y方向・Z方向それぞれにおける歪みを検出する8組の歪み検出手段1a,1b,・・・,1hに対応して、24(=8×3)個の歪み値が算出される(図6参照)。
さらに、歪み値算出手段23は、各歪み検出手段1に対応した24個の歪み値を変形パターン推定手段25に出力する。ちなみに、前記歪み値は、高さ調整機構81によってフォトマスク71の高さ調整を行った際の歪み値を基準(歪み値ゼロ)とした場合の歪み値であり、高さ調整時からの歪み値の変化量を表す。
【0039】
変形パターン記憶手段24には、それぞれの歪み検出手段1の設置位置での歪み分布と、フォトマスク71の変形パターンとが対応して記憶されている。
なお、変形パターンとして、例えば、以下に示す(1)〜(6)の6通りのパターンがある。ただし、変形パターンは、以下に示す(1)〜(6)のパターンのみに限定されるものではない。
以下の記載において、例えば、「隅部Aが隅部Bに対して所定量だけ高い」とは、フォトマスク71がガラス基板51と略平行となっている状態から、隅部A(図3参照)が所定量だけ高くなる、及び/又は、隅部B(図3参照)が所定量だけ低くなる状態を指すものとする
【0040】
(1)隅部B,Dが隅部A,Cに対して所定量だけ高い状態。
(2)隅部B,Dが隅部A,Cに対して所定量だけ低い状態。
(3)隅部Aが隅部Bに対して所定量だけ高い、及び/又は、隅部Cが隅部Dに対して所定量だけ低い状態。
(4)隅部Aが隅部Bに対して所定量だけ低い、及び/又は、隅部Cが隅部Dに対して所定量だけ高い状態。
(5)隅部Bが隅部Cに対して所定量だけ高い、及び/又は、隅部Aが隅部Dに対して所定量だけ低い状態。
(6)隅部Bが隅部Cに対して所定量だけ低い、及び/又は、隅部Aが隅部Dに対して所定量だけ高い状態。
【0041】
図6に示すように、変形パターン記憶手段24には、それぞれの歪み検出手段1の設置位置(8箇所)及び検出される歪み方向(X、Y,Z方向)における24個の歪み値の分布と、上記の6個の変形パターンとが対応付けて記憶されている。ちなみに、図6に示す「変形パターン1」は、前記で示した6個の変形パターンのうち(1)に該当する。
【0042】
なお、図6に示す歪み値の分布において、例えば歪み値αとは、予め設定されたX方向における歪み値であり、変形パターンを推定する際の閾値となる。また、歪み値β,γについても同様である。
また、歪み値α,β,γは正の値であるものとする。例えば、変形パターン1に示すように、歪み検出手段1axの歪み値が「−(α以下)」であり、歪み検出手段1ayの歪み値が「−(β以下)」であるとは、前記各歪み値の符号が歪み検出手段1azの歪み値γの符号と反転しており、かつ、それぞれの歪み値の絶対値がα以下、β以下であるという条件を示している。
【0043】
また、図6に示す変形パターン1において、歪み測定手段1az,1ezに対応する閾値は、それぞれγとなっている(網掛け部分参照)。これは、歪み測定手段1az,1ezに対応して算出された歪み値のうちいずれか一方又は両方が、閾値γ以上であるという条件を示している。
これらの歪み値の分布と歪みパターンとの対応関係は、予め実験やシミュレーションを用いて取得され、歪みパターン記憶手段24に記憶されている。
【0044】
変形パターン推定手段25(図4参照)は、歪み値算出手段23からの入力値(24個の歪み値)と、変形パターン記憶手段24から読み出した各変形パターンに対応する歪み値の分布条件とを比較して、フォトマスク71の変形パターンを推定する。つまり、変形パターン推定手段25は、歪み値算出手段23からの入力されたそれぞれの歪み値の分布に基づいて、図6に示す6通りのうち、どの変形パターンに該当するかを推定する。
ちなみに、図6に示す6通りの変形パターンのいずれにも該当しない場合、変形パターン推定手段25は、フォトマスク71が変形していないものと判断する。
【0045】
そして、変形パターン推定手段25は、歪み値算出手段23から入力された24個の歪み値のうち、推定した変形パターンに対応する歪み値の分布条件において、Z方向での歪み値がγとして設定された箇所の歪み値を、補正量算出手段26(図4参照)に出力する。
例えば、変形パターン推定手段25は、図6に示す変形パターン1であると推定した場合には、網掛け部分で示す歪み検出手段1az,1ezに対応する2個の歪み値を補正量算出手段26に出力する。
これは、後記するように、補正手段3がフォトマスク支持フレーム72をZ方向に変形させることによって、フォトマスク71の変形(ねじれ、たわみなど)を補正するからである。
【0046】
補正量算出手段26は、変形パターン推定手段25から入力される歪み値に基づいて、フォトマスク71の変形を打ち消す補正量を算出し、当該補正量及び前記歪み値を与えた歪み検出手段1の識別情報を電圧値算出手段27に出力する。
図7は、Z方向歪み値と補正量との関係を示すグラフである。図7に示すように、Z方向歪み値と補正量とは比例関係となっている。なお、図7に示すZ方向歪み値と補正量との関係は、予め実験又はシミュレーションによって取得され、それぞれの変形パターンに対応して、補正量算出手段26の図示しない記憶部に記憶されているものとする。
例えば、図6の変形パターン1では、補正量算出手段26は、歪み検出手段1az,1ezに対応する2個の歪み値から、図7に示す関係に基づいて補正量を算出する。そして、補正量算出手段26は、算出した補正量(変形量)及び当該補正量だけ変形させる補正手段3の識別情報(補正手段3a,3eの識別情報)を電圧値算出手段27に出力する(図4参照)。
【0047】
ちなみに、前記したように、補正手段3のX−Y方向における設置位置は、歪み検出手段1のX−Y方向における設置位置に対応した配置となっている。例えば、歪み検出手段1azの歪み値(Z方向歪み値)を用いてフォトマスク71の変形を補正する場合、当該歪み検出手段1azに対応する補正手段3a(図3参照)を変形させることによって補正する。
【0048】
電圧値算出手段27は、補正手段3が前記補正量だけ変形するのに必要な電圧値を算出し、その電圧を補正手段3に対して出力する。なお、補正手段3の変形量(補正量)と、その際に印加される電圧との関係は図示しない記憶手段に記憶されている。電圧値算出手段27は、補正量算出手段26から入力される補正量と、前記記憶手段から読み出したデータに基づいて補正手段3に印加する電圧を算出し、当該電圧を補正手段3に出力する。また、電圧値算出手段27は、前記電圧を補正手段3に出力した時刻をシャッター開閉手段28に出力する。
【0049】
(3.補正手段)
補正手段3は圧電素子(ピエゾ素子)であり、印加される電圧に応じて変形するようになっている。
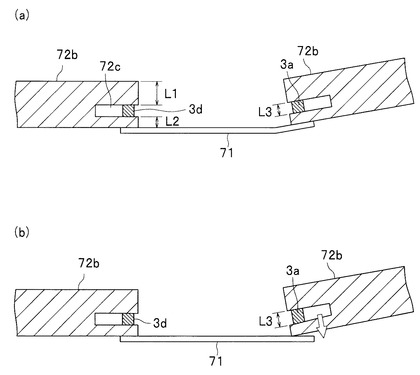
図8に示すように、フォトマスク支持フレーム72の内周フレーム72bには、補正手段3の設置位置に対応して、内周フレーム72bの内側面に対し垂直に穿たれた所定長の長穴部72cが形成されている。
なお、フォトマスク支持フレーム72の内周フレーム72bは、外周フレーム72a(図3参照)よりも軟質の(剛性が低い)部材で構成されている。つまり、内周フレーム72bは外周フレーム72aよりも変形しやすくなっている。
【0050】
また、図8(a)に示すように、長穴部72cの下側の内面と内周フレーム72bの下面との距離L2は、長穴部72cの上側の内面と内周フレーム72bの上面との距離L1よりも小さくなるように設計されている。これは、補正手段3がZ方向に伸縮した場合に、内周フレーム72bのうち、フォトマスク71が吸着されている側(下側)を変形しやすくするためである。
また、補正手段3は、長穴部72c内の上面及び下面に密着し、長穴部72c内で内周フレーム72bの上面に対して垂直方向に伸縮自在に設置されている。そして、補正手段3は、電圧値算出手段27から入力(印加)された電圧に応じて所定量だけ伸縮する。
【0051】
例えば、高さ調整機構81(図1参照)の支持点の高さ関係が外乱によってくずれ、図3に示すフォトフレーム72の隅部Bよりも隅部Aのほうが高くなったとする。この場合、フォトフレーム72が変形するため、図8(a)に示す右側の内周フレーム72bが変形する。そうすると、図示しないチャックによって内周フレーム72bの下面に吸着されているフォトフレーム71も、内周フレーム72bの変形に追従して変形することとなる。
【0052】
ここで、図8(b)に示すように、補正手段3aに電圧を印加して伸長させ、内周フレーム72bの伸縮方向における長さL3を大きくした場合、内周フレーム72bのうち補正手段3aの下面に密着している部分が下側に押圧され、長穴部72cの開口部がさらに開かれる。つまり、内周フレーム72bのうち、補正手段3aが設置されている部分が局部的に変形する。
そして、フォトマスク71は内周フレーム72bの変形に応じて変形し、図8(b)に示すようにフォトマスク71とガラス基板51(図2参照)とが略平行になる。
【0053】
ちなみに、図8(a)に示した場合とは逆に、フォトマスク71の右側が下がっている場合には、補正手段3aの前記長さL3を小さくするように変形させることによって、内周フレーム72bのうち補正手段3aの下面に密着している部分を上側に引き付ける。
【0054】
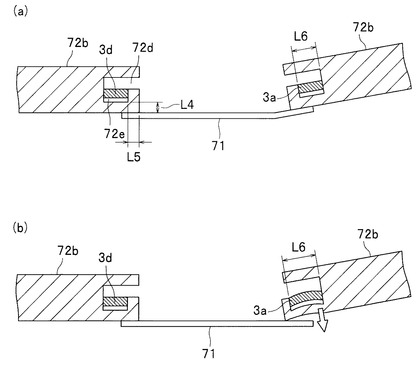
また、補正手段3を、図9(a)に示すように設置してもよい。この場合には、フォトマスク支持フレーム72の内周フレーム72bには、補正手段3の設置位置に対応して、内周フレーム72bの内側面に対し垂直に穿たれた所定長の第1長穴部72dが形成されている。また、第1長穴部72dと連通し、下方向に伸びることによって第1長穴部72dとともにL字状の長穴部を形成する第2長穴部72eが形成されている。このように補正手段3を設置することによって、内周フレーム72bをより薄く形成することができる。
なお、前記で説明したように、フォトマスク支持フレーム72の内周フレーム72bは、外周フレーム72a(図3参照)よりも軟質の(剛性が低い)部材で構成されている。
【0055】
また、第2長穴部72eの底面と内周フレーム72bの下面との距離L4が比較的小さくなるように設計されている。同様に、第1長穴部72dの底面に対向する第2長穴部72eの内壁面と内周フレーム72bの内側面との距離L5も比較的小さくなるように設計されている。これは、補正手段3の伸縮に応じて内周フレーム72bが変形しやすくするためである。
【0056】
補正手段3は、第2長穴部72e内で内周フレーム72bの内側面に対し垂直方向に伸縮自在に設置され、補正手段3の伸縮方向に対応する前記L字状の長穴部の内面と密着している。また、補正手段3は、電圧値算出手段27から入力(印加)された電圧に応じて所定量だけ伸縮する。
例えば、図9(a)に示すように、右側の内周フレーム72bが変形した場合、図9(b)に示すように、補正手段3aが伸長する。補正手段3aの伸縮方向における長さL6が大きくなった場合、補正手段3aの前記変形に追従して、内周フレーム72bが下側に押圧される。つまり、内周フレーム72bのうち、補正手段3aが設置されている部分が局部的に変形する。
そして、フォトマスク71が内周フレーム72bの変形に応じて変形し、図9(b)に示すフォトマスク71とガラス基板51(図2参照)とが略平行になる。
【0057】
<転写処理の概要>
図1、図2に示した液晶露光装置100において、フォトマスク71の下面のパターンをガラス基板51に転写する一連の動作は、以下のとおりである。
まず、搬送ロボット(図示せず)が、ガラス基板51をチャック43a(図2参照)上に置き、チャック43aがガラス基板51を真空吸着する。次に、制御装置2の指令に従って、アクチュエータ(図示せず)がXステージ42と、Yステージ43とをそれぞれ所定の位置に移動させる。そして、制御装置2の指令に従って、高さ調整機構81(図2参照)がフォトマスク71とガラス基板51が平行かつ数十〜数百μmの間隔になるように調整する。なお、前記のようにいったん高さ調整した後は、転写が終了するまで高さ調整機構81を用いた調整は行わない。
【0058】
次に、制御装置2は、歪み検出手段1によって検出された歪みの分布に基づいて、補正手段3に所定の電圧を印加し、補正手段3を変形させることによりフォトマスク71の変形(ねじれ、たわみなど)を補正する。その後、制御装置2からの指令に従ってシャッター61d(図2参照)が開き、水銀ランプ61a(図2参照)の光を通過させてフォトマスク71の下面のパターンをガラス基板51に転写する。
【0059】
なお、フォトマスク71のパターンをガラス基板51に1回転写することによって、当該ガラス基板51に対する転写処理が終了するとは限らない。つまり、フォトマスク71のサイズに対してガラス基板51のサイズが大きい場合には、1枚のガラス基板51に対して複数回(例えば、4回)の転写を行うこととなる。この場合、制御装置2は、転写ごとにXステージ機構42(図1参照)及びYステージ機構43(図1参照)を駆動することによって、ガラス基板51の位置を所定の転写位置に移動させる。
【0060】
さらに、制御装置2は、フォトマスク71のパターンを転写する各転写位置にガラス基板51を移動させる毎に補正手段3の変形量(補正量)を算出し、当該補正量に対応する電圧を補正手段3に出力する。
【0061】
<フォトマスクの変形補正処理の処理手順>
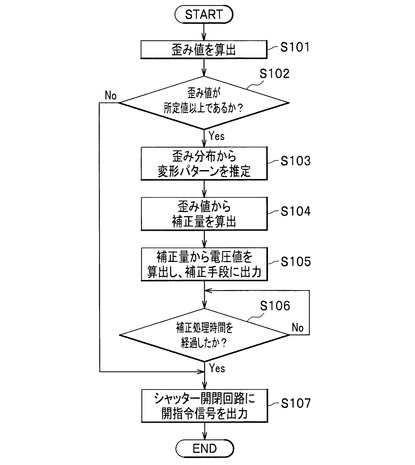
図10は、制御装置におけるフォトマスクの変形補正処理の流れを示すフローチャートである。
まず、ステップS101で、制御装置2の歪み値算出手段23(図4参照)は、直流電圧出力手段21から入力される電圧値、及び、各歪み検出手段1に対応するブリッジ回路22から入力される電圧値に基づいて、各歪み値を算出する。
【0062】
ステップS102で、制御装置2の変形パターン推定手段25(図4参照)は、歪み値が所定値以上であるか否かを判断する。より具体的には、変形パターン推定手段25は、変形パターンごとに特定の歪み検出手段1(例えば、変形パターン1の場合には、歪み検出手段1az,1bx,1ez,1fx:図6参照)の歪み値が所定値以上であるか否かを判断する。
ステップS102で、歪み値が所定値以上である場合(ステップS102→Yes)、制御装置2の処理はステップS103に進む。また、ステップS102で、歪み値が所定値未満である場合(ステップS102→No)、制御装置2の処理はステップS107に進む。
【0063】
ステップS103で、変形パターン推定手段25(図4参照)は、歪み値算出手段23によって算出された歪み値の分布から、フォトマスク71の変形パターンを推定(特定)する。
ステップS104で、制御装置2の補正量算出手段26(図4参照)は、歪み値から補正量を算出する。より具体的には、補正量算出手段26は、ステップS103で推定した変形パターンに対応する歪み値の分布条件において、Z方向での歪み値が所定値(α)以上として設定された歪み検出手段1の歪み値(例えば、変形パターン1では、歪み検出手段1az,1ezの歪み値:図6参照)から、補正量を算出する。
【0064】
ステップS105で、制御装置2の電圧値算出手段27(図4参照)は、前記補正量に基づいて、当該補正量だけ補正手段(圧電素子)3を変形させるための電圧値を算出し、特定の補正手段3(例えば、変形パターン1に該当する場合には、補正手段3a,3e:図6参照)に前記電圧を出力する。
ステップS106で、制御装置2のシャッター開閉手段28(図4参照)は、電圧値算出手段27が補正手段3に対して電圧を出力した時刻から補正処理時間が経過下か否かを判断する。ちなみに、補正処理時間とは、前記したように補正手段3が電圧を印加されてから変形を終えるまでに要する時間(+所定の余裕時間)である。
【0065】
ステップS106で、補正処理時間が経過した場合、制御装置2の処理はステップS107に進む。ステップS106で、補正処理時間が経過していない場合、シャッター開閉手段28はステップS106の処理を繰り返す。
ステップS107で、シャッター開閉手段28は、シャッター61d(図2参照)に内蔵されているシャッター開閉回路(図示せず)対して、シャッター開指令信号を出力する。
【0066】
<効果>
本実施形態に係る液晶露光装置100によれば、制御装置2が、歪み検出手段1によって検出された歪みの分布を、変形パターン記憶手段24に記憶されている各変形パターンにおける歪み値の分布と比較することによって、フォトマスク71の変形パターンを適切かつ容易に推定することができる。
【0067】
外周フレーム72aの上面に設置されている高さ調整機構81(図2参照)の位置関係がくずれた場合に、その影響によって最も変形しやすいのは、隅部A,B,C,D(図3参照)付近である。したがって、隅部A,B,C,D付近に設置されている歪み検出手段1によって高さ調整機構81の位置関係のずれによって生じるフォトマスク支持フレーム72の微少な歪みを検出することができる。
【0068】
また、補正手段3は、フォトマスク支持フレーム72のうちの内周フレーム72bに設置されている。当該内周フレーム72bは、外周フレーム72aよりも剛性が低い部材で構成されているため、補正手段3の変形に応じて変形しやすくなっている。つまり、補正手段3の伸縮を内周フレーム72b及びフォトマスク71の変形に適切に反映させることができる。
一方、外周フレーム72aは内周フレーム72bよりも剛性が高い部材で構成されているため、補正手段3の伸縮に伴う内周フレーム72bの変形の影響を受けることがない。したがって、外周フレーム72a及び高さ調整機構81に余計な応力がかからず、フォトマスク71を安定して支持することができる。
【0069】
このようにして、液晶露光装置100は、フォトマスク支持フレーム72の一部を変形させることによって、フォトマスク71の変形(ねじれ、たわみなど)を補正することができる。したがって、フォトマスク71とガラス基板51とを平行にすることにより、転写精度を向上させることができる。
【0070】
また、従来技術では、フォトマスク71が変形してしまった場合、フォトマスク71の全面の変形を測定するか、ガラス基板51への転写結果から変形の度合いを判断していた。そして、高さ調整機構81を微少に動かすことにより、フォトマスク71の変形を補正していた。このように、従来技術では、フォトマスク71が変形した場合の補正に長時間を要し、生産性が低下してしまうという問題があった。
これに対して本実施形態に係る液晶露光装置100では、いったん高さ調整を行った後は転写が終了するまで高さ調整を行わず、フォトマスク支持フレーム72に設置された補正手段3を変形させることによって短時間でフォトマスク71の変形(ねじれ、たわみなど)を補正し、生産性の向上を図ることができる。
【0071】
≪第2実施形態≫
第1実施形態では、歪み検出手段1として歪みゲージを用いたが、第2実施形態では、歪み検出手段1として不純物拡散抵抗で構成されるブリッジ回路を用いる点が異なる。その他の構成については、第2実施形態は第1実施形態と同様である。
したがって、第1実施形態と異なる部分について説明し、重複する部分については説明を省略する。
【0072】
図11に示すように、歪み検出手段1は、フォトマスク支持フレーム72の外周フレーム72aの上面及び側面に設置されている。
なお、各歪み検出手段1a(1a1,1a2:以下、同様である。),1b,・・・,1hの設置位置は、第1実施形態で説明した各歪み検出手段1a,1b,・・・,1h(図3参照)の設置位置に対応している。ちなみに、各補正手段3の設置位置は、第1実施形態の場合と同様である。
【0073】
また、歪み検出手段1はp型不純物拡散抵抗であり、外部から応力が加わることによって変形し、当該変形に対応して抵抗値が変化するようになっている。図11の部分拡大図に示すように、外周フレーム72aの上面に設置されたシリコン基板1a1上に、4個のp型不純物拡散抵抗101,102,103,104が設置されている。また、p型不純物拡散抵抗101,103は、自身が設置される外周フレーム72aの稜線に平行になるように設置されている。また、p型不純物拡散抵抗102,104は、自身が設置される外周フレーム72aの稜線に垂直になるように設置されている。
また、外周フレーム72aの側面に設置されたシリコン基板1a2上に、4個のp型不純物拡散抵抗105,106,107,108が設置されている。なお、各抵抗の配置は前記したものと同様であるから、説明を省略する。
【0074】
ここで、各p型不純物拡散抵抗は、自身に電流が流れる方向(長手方向)が、シリコン基板1a1,1a2の結晶方位と一致するように設置されている。これによって、図12に示すように、p型不純物拡散抵抗101,102,103,104、及び、p型不純物拡散抵抗105,106,107,108がそれぞれ接続されて、ホイーストンブリッジを構成している。
また、図12に示すように、2個のホイーストンブリッジは、制御装置2の直流電流入力手段21と、歪み値算出手段23(23ax,23ay,23az)に接続されている。つまり、図11に示す各シリコン基板1a1,1a2・・・1h1,1h2に設置されたそれぞれのp型不純物拡散抵抗で構成されるブリッジ回路が、図4に示すブリッジ回路22に相当する。
【0075】
このように各p型不純物拡散抵抗を配置することにより、ピエゾ抵抗効果によって大きな抵抗値の変化が得られ、高感度で外周フレーム72aの歪みを検出することができる。
なお、歪みを検出した後の制御装置2の動作は、第1実施形態で説明したものと同様であるから、説明を省略する。
【0076】
<効果>
本実施形態に係る液晶露光装置100Aによれば、歪み検出手段1としてp型不純物拡散抵抗を用いる。これによって、当該歪み検出手段1は、その内部に微細なブリッジ回路を形成することとなる。したがって、前記ブリッジ回路が小さく内部を磁束が通り抜け難くなり、ブリッジ回路に対する電磁ノイズの影響を低減することができる。
【0077】
また、p型不純物拡散抵抗を用いた歪み検出手段1は、歪みゲージを用いた歪み検出手段に比べ温度の影響を受けにくく、かつ、より高感度である。したがって、p型不純物拡散抵抗を用いた歪み検出手段1を用いることで、高精度な歪み測定が可能となる。これによって制御装置2は、外周フレーム72aの変形パターンをより適切に推定し、かつ、フォトマスク71をガラス基板51と平行にするための補正量も適切に算出することが可能となる。
【0078】
≪変形例≫
以上、本発明に係る液晶露光装置について、各実施形態により説明したが、本発明の趣旨はこれらの記載に限定されるものではなく、種々の変更などを行うことができる。
例えば、第1実施形態では、歪み検出手段1(図3参照)を外周フレーム72aの上面及び外側面に設置することとしたが、これに限らない。すなわち、X方向又はY方向の歪みを検出する歪み検出手段1を外周フレーム72aの下面又は内部に設けてもよい。
ちなみに、歪み検出手段1を外周フレーム72aの内部に設ける場合には、例えば、外周フレーム72aの上面に対して平行な長穴部(図示せず)を設け、当該長穴部の上側又は下側の内面に歪み検出手段1を設置することとすればよい。
同様に、Z方向の歪みを検出する歪み検出手段1を外周フレーム72aの内側面又は内部に設置することとしてもよい。
【0079】
また、第1実施形態では、X方向の歪み検出手段1と、Y方向の歪み検出手段1とをX−Y平面上において異なる位置に設置していたが(図3参照)、これに限らない。すなわち、X方向の歪み検出手段1と、Y方向の歪み検出手段1とを積層させることとしてもよい。
【0080】
また、第1実施形態では、歪み検出手段1を一部に含むブリッジ回路22によって歪みを検出することとしたが、これに限らない。例えば、歪み検出手段1として圧電体(図示せず)付近に超電導体(図示せず)を設置し、移動電界の作用で超電導体中のキャリアの抵抗率を測定することによって、歪みを検出することとしてもよい。この場合には、歪み検出手段1と制御装置2とを非接触とすることができる。
【0081】
また、前記各実施形態では、ブリッジ回路22(図4参照)としてホイーストンブリッジを用いた例を示したが、これに限らない。すなわち、歪み検出手段1の微少な抵抗値の変化を検出できるものであれば、他のブリッジ回路を用いてもよい。
また、前記各実施形態では、補正手段3として圧電素子(ピエゾ素子)を用いたが、これに限らない。例えば、補正手段3として、空圧又は油圧で駆動するアクチュエータを使用してもよい。
【0082】
また、前記各実施形態では、8個の補正手段3を内周フレーム72bに設置することとしたが、これに限らない。前記したように、補正手段3の伸縮によって、内周フレーム72bのうち補正手段3aが設置されている部分が局部的に変形する。したがって、補正手段3を多数設けることによって、より高次の変形にも対応できる。
また、第2実施形態では、歪み検出手段1としてp型不純物拡散抵抗を用いたが、p型不純物拡散抵抗に代えてn型不純物拡散抵抗を用いてもよい。
【0083】
また、前記した各実施形態では、フォトマスク支持フレーム72(図3参照)を、外周フレーム72aと、外周フレーム72aに対して剛性が低い内周フレーム72bとを一体で形成することとしたが、これに限らない。すなわち、外周フレーム72aと内周フレーム72bとを同じ部材で形成してもよい。この場合でも、例えば、図8の長さL2で示す部分を肉薄に形成することによって、補正手段3がZ方向に伸縮した場合に、内周フレーム72bのうち、フォトマスク71が吸着されている側(下側)が変形しやすくなる。
【0084】
また、前記した各実施形態では、フォトマスク支持フレーム72(図3参照)の外周フレーム72aに歪み検出手段1を設置することとしたが、これに限らない。すなわち外周フレーム72aに代えて、内周フレーム72bに歪み検出手段1を設置することとしてもよい。
【0085】
また、前記した各実施形態では、フォトマスク支持フレーム72(図3参照)の内周フレーム72bに補正手段3を設置することとしたが、これに限らない。すなわち内周フレーム72bに代えて、外周フレーム72aに補正手段3を設置することとしてもよい。この場合には、外周フレーム72aのうち、垂直方向に見てフォトマスク71が吸着されている領域まで穿たれた溝部を形成し、例えば、図8の長さL2に示す部分と同様に、フォトマスク71が吸着される側を肉薄にする。これによって、外周フレーム72aに設置された補正手段3の変形に追従して、フォトマスク71も変形することとなる。
【0086】
また、前記した各実施形態では、歪み検出手段1と補正手段3とが1対1で対応していることとしたが、これに限らない。すなわち、例えば、歪みパターンの数(上記各実施形態では6パターン)に対応して所定箇所に補正手段3を設置することとしてもよい。
【符号の説明】
【0087】
100,100A 液晶露光装置
1,1a,1b,1c,1d,1e,1f,1g,1h 歪み検出手段
2 制御装置
21 直流電圧出力手段(制御手段)
22 ブリッジ回路
23 歪み値算出手段(制御手段)
24 変形パターン記憶手段
25 変形パターン推定手段(制御手段)
26 補正量算出手段(制御手段)
27 電圧値算出手段(制御手段)
3,3a,3b,3c,3d,3e,3f,3g,3h 補正手段
42 Xステージ機構(ステージ機構)
43 Yステージ機構(ステージ機構)
51 ガラス基板
71 フォトマスク
72 フォトマスク支持フレーム
72a 外周フレーム
72b 内周フレーム
72c 長穴部
72d 第1長穴部
72e 第2長穴部
81 高さ調整機構
A,B,C,D 隅部
101,102,103,104,105,106,107,108 p型不純物拡散抵抗(不純物拡散抵抗)
【技術分野】
【0001】
本発明は、フォトマスクに形成されたパターンをガラス基板に転写する液晶露光装置及び露光処理方法に関する。
【背景技術】
【0002】
液晶パネルの製造では、プロキミシティ露光方式の液晶露光装置が広く用いられている。プロキミシティ露光方式では、フォトレジスト膜などが形成されたガラス基板とフォトマスクとの間を1mm以内に近づけ、露光用ランプからの光をフォトマスクに照射し、当該フォトマスクに形成されたパターンをガラス基板に転写する。
【0003】
また、プロキミシティ露光方式においては、フォトマスクとガラス基板の平坦度及び平行度が転写精度に大きく影響する。すなわち、転写時においてフォトマスクとガラス基板とをそれぞれ平坦とし、かつ、フォトマスクとガラス基板とを平行とすることにより、高い転写精度を実現することができる。
なお、近年は、スマートフォン、タブレットパソコンなどの普及により、中小型の高解像度パネルの需要が高まっており、液晶露光装置の転写精度をより高めることが求められている。
【0004】
特許文献1には、基板(ガラス基板)を保持するチャックを多数の点で支持しながら、チャックに保持された基板の位置決め、及び、前記基板とフォトマスクとのギャップ制御を行う、プロミキシティ露光方式の露光装置(液晶露光装置)について記載されている。当該技術によれば、基板とフォトマスクとのギャップを制御することによって、露光精度を向上させることができる。
【0005】
また、特許文献2には、マスク(フォトマスク)の周縁部を保持することで当該マスクの上方に気密室を形成するマスクホルダを備え、当該マスクホルダにマスク吸着路と、エア吸引路などが形成されたマスク保持装置について記載されている。当該技術によれば、マスク吸着路を介して気密室からエアを吸引することによってマスクを吸着保持し、かつ、エア吸引路を介して気密室内のエアを吸引することによって、マスクの自重によるたわみを防止することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−235019号公報
【特許文献2】特開2003−131388号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1に記載の技術では、基板(ガラス基板)の平坦度を高めることができるものの、外乱によってフォトマスクにねじれが生じた場合には、基板とフォトマスクとが平行にならないという問題がある。つまり、フォトマスクにねじれが生じた場合には、フォトマスクの各点と、これに対応する基板の各点との距離に差が生じて、転写精度が低下してしまうという問題がある。
【0008】
なお、前記した「外乱」として、例えば、基板(ガラス基板)を移動させるステージの変形や、露光装置(液晶露光装置)が設置されている床の経時的な変化や、露光装置が設置されている室内での局部的な温度変化などが挙げられる。
フォトマスク支持フレームの高さを調整する高さ調整機構が前記のような外乱を受けると、当該高さ調整機構の支持点の位置関係がくずれ、フォトマスク支持フレームにねじれが生じてしまう。そうすると、フォトマスク支持フレームの前記ねじれに追従してフォトマスクもねじれることとなる。
【0009】
また、特許文献2に記載の技術では、エア吸引路を介して気密室内のエアを吸引することによってマスク(フォトマスク)の自重によるたわみを補正できるものの、マスクがねじれた場合に、当該ねじれを補正することができないという問題がある。つまり、マスクがねじれた場合において気密室の気圧を低下させても、ねじれが残ったままマスクが上方(気密室側)に吸引されることになる。そうすると、前記した特許文献1の場合と同様に、マスクのねじれによって転写精度が低下してしまうという問題がある。
【0010】
ちなみに、「たわみ」とは、部材が外力の作用によって湾曲した際、荷重を受ける前の部材の軸線と直角方向に変位することを指す。また、「ねじれ」とは、弾性体の一端を固定し、他端に、軸方向に力のモーメントをもつ偶力を働かせたとき起こる変形を指す。
なお、以下の記載において「変形」とは、前記の「たわみ」及び「ねじれ」を含むものとする。
【0011】
そこで、本発明は、転写精度が向上された液晶露光装置及び露光処理方法を提供することを課題とする。
【課題を解決するための手段】
【0012】
前記課題を解決するために、本発明に係る液晶露光装置は、ガラス基板をフォトマスクに対して相対的に移動させるステージ機構と、前記フォトマスクを支持するフォトマスク支持フレームと、前記フォトマスク支持フレームの各位置での歪みを検出する複数の歪み検出手段と、前記フォトマスクの変形を補正する補正手段と、前記歪み検出手段の各位置での歪み分布と、前記フォトマスクの変形パターンと、が対応して記憶されている変形パターン記憶手段と、前記ステージ機構を駆動させて前記ガラス基板を転写位置に移動させ、前記歪み検出手段によって検出された歪み分布と、前記変形パターン記憶手段から読み出した変形パターンの歪み分布とを比較して、前記フォトマスクの変形パターンを推定し、推定した前記変形パターン、及び、前記歪み検出手段によって検出された歪み量に基づいて、前記フォトマスクの変形を打ち消す補正量を算出し、当該補正量に対応する電圧を前記補正手段に対して出力する制御手段と、を備えることを特徴とする。
【0013】
また、本発明に係る露光処理方法は、ステージ機構を駆動させてガラス基板を転写位置に移動させるステップと、フォトマスクを支持するフォトマスク支持フレームの各位置での歪みを、複数の歪み検出手段を用いて検出するステップと、複数の前記歪み検出手段によって検出された歪み分布と、変形パターン記憶手段から読み出した変形パターンの歪み分布とを比較して、前記フォトマスクの変形パターンを推定するステップと、推定した前記変形パターン、及び、前記歪み検出手段によって検出された歪み量に基づいて、前記フォトマスクの変形を打ち消す補正量を算出するステップと、当該補正量に対応する電圧を、前記フォトマスクの変形を補正する補正手段に対して出力するステップと、有することを特徴とする。
【発明の効果】
【0014】
本発明により、転写精度が向上された液晶露光装置及び露光処理方法を提供することができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1実施形態に係る液晶露光装置の外観斜視図である。
【図2】液晶露光装置の側面図(一部断面透視図)である。
【図3】フォトマスク支持フレームに設置された歪み検出手段と、補正手段の設置位置を示す外観斜視図である。
【図4】歪み検出手段と、制御装置と、補正手段との関係を示すブロック図である。
【図5】歪み検出手段と、制御装置の直流電圧出力手段・ブリッジ回路・歪み値算出手段との関係を示す説明図である。
【図6】制御装置の変形パターン記憶手段に記憶されている変形パターンテーブルを示す図である。
【図7】Z方向歪み値と補正量との関係を示すグラフである。
【図8】補正手段をフォトマスク支持フレームの上面に対して垂直方向に伸縮自在に設置した場合の断面図であり、(a)はフォトマスク支持フレームが変形した場合であり、(b)は、補正手段によって前記変形を補正した場合である。
【図9】補正手段をフォトマスク支持フレームの内側面に対して垂直方向に伸縮自在に設置した場合の断面図であり、(a)はフォトマスク支持フレームが変形した場合であり、(b)は、補正手段によって前記変形を補正した場合である。
【図10】制御装置におけるフォトマスクの変形補正処理の流れを示すフローチャートである。
【図11】本発明の第2実施形態に係る液晶露光装置において、フォトマスク支持フレームに設置された歪み検出手段と、補正手段の設置位置を示す外観斜視図である。
【図12】歪み検出手段と、制御装置の直流電圧出力手段・歪み値算出手段との関係を示す説明図である。
【発明を実施するための形態】
【0016】
本発明の実施形態について、適宜図面を参照しながら詳細に説明する。なお、各図において、共通する部分には同一の符号を付し、重複した説明を省略する。
【0017】
≪第1実施形態≫
<液晶露光装置の構成>
図1は、本発明の第1実施形態に係る液晶露光装置の外観斜視図である。液晶露光装置100は、フォトリソグラフィ技術によりフォトマスク71の微細パターンをガラス基板51上に投影・転写するものである。
図1に示すように、液晶露光装置100は、ベース41と、Xステージ機構42と、Yステージ機構43と、ランプハウス61と、ミラーハウス62と、フォトマスク71と、を備える。
ベース41は、図示しない床面上に設置されており、ベース41の上面には、Xガイドレール41aが対で形成されている。Xステージ42は、ベース41上をXガイドレール41aに沿ってX方向に移動可能となっている。また、Xステージ42の上面には、Yガイドレール42aが対で形成されている。Yステージ43は、Xステージ42上をYガイドレール42aに沿ってY方向に移動可能となっている。
【0018】
なお、Xステージ機構42と、Yステージ機構43とは、後記する制御装置2(図2参照)からの指令によって駆動するアクチュエータ(図示せず)により、それぞれX方向、Y方向に移動可能となっている。そして、当該移動に対応して、Yステージ43上に載置(吸着)されたガラス基板51をX,Y方向に移動させ、所望の転写位置まで移動させることができるようになっている。
ちなみに、ガラス基板51は外部の搬送ロボット(図示せず)によってYステージ43上に載置され、チャック43a(図2参照)によって吸着される。そして、転写が終了すると、チャック43aによる吸着が解除され、ガラス基板51は前記搬送ロボットによってYステージ43から取り上げられる。
【0019】
ランプハウス61は、後記する水銀ランプ61a、集光鏡61b、フライアレンズ61c、シャッター61d(図2参照)などを収容する筐体である。ミラーハウス62は、後記する集光鏡62a、平面鏡62b(図2参照)などを収容する筐体である。
フォトマスク71は、例えば、石英又はガラスなどで構成されており、ガラス基板51に転写するパターン(例えば、電子部品の回路パターン)の原版となるものである。
【0020】
なお、液晶露光装置100は、図1に示す構成の他に、後記する歪み検出手段1、制御装置2、補正手段3、フォトマスク支持フレーム72、高さ調整機構81などを備える(図2参照)。
【0021】
図2は、液晶露光装置の側面図(一部断面透視図)である。前記したように、水銀ランプ61a、集光鏡61b、フライアイレンズ61c、シャッター61dなどが、ランプハウス61(図1参照)内に設置されている。水銀ランプ61a(高輝度放電ランプ)61aから放出された光は、集光鏡61bによって集光され、フライアイレンズ61cを通過して強度分布が均一化される。そして、シャッター61dは、制御装置2からの指令に従って、水銀ランプ61aからの光を通過又は遮断する。
【0022】
また、前記したように、集光鏡62a、平面鏡62bなどがミラーハウス62(図1参照)内に設置されている。集光鏡62a及び平面鏡62bは、フライアイレンズ61cを介して照射された光を反射して、当該光がフォトマスク71に対して垂直に照射されるように設置されている。
【0023】
フォトマスク支持フレーム72は、フォトマスク71を支持するものである。フォトマスク支持フレーム72は、外周フレーム72a(図3参照)と、当該外周フレーム72aと一体に形成された内周フレーム72b(図3参照)と、を備える。ここで、「一体に形成」とは、外周フレーム72aと内周フレーム72bとが別部材ではあるが、溶接やボルト締めなどによって剛に接続されている場合も含む。
なお、フォトマスク支持フレーム72の下面には、図示しないチャックが設置されており、当該チャックの負圧によってフォトマスク71がフォトマスク支持フレーム72に吸着される。
【0024】
高さ調整機構81は、図3に示す外周フレーム72a(図3参照)の隅部A,B,C,D付近の上面にそれぞれ設置され、制御装置2からの指令に従ってフォトマスク71の高さ調整を行う。ちなみに、図3では、高さ調整機構81(図2参照)の図示を省略している。また、高さ調整機構81は、図示しない筐体によって上から支持されている。
【0025】
歪み検出手段1(1a,1b,・・・,1h:図3参照)は、フォトマスク支持フレーム72の外周フレーム72a(図3参照)の上面及び外側面に設置されている。歪み検出手段1は、例えば、金属製の歪みゲージであり、その抵抗値(電気抵抗)が歪みの量に比例して変動するものである。
【0026】
制御装置2は、歪み検出手段1を回路の一部として含むブリッジ回路22(図4参照)を備え、直流電圧を歪み検出手段1に対して出力し、歪み検出手段1の抵抗値の変化から歪み値を算出する。さらに、制御装置2は、歪み値の分布からフォトマスク71の変形パターンを推定して補正量を算出し、当該補正量に対応する電圧を補正手段3に対して出力する。
補正手段3(3a,3b,・・・,3h:図3参照)は、フォトマスク支持フレーム72の内周フレーム72b(図3参照)の内部に設置されている。補正手段3は、例えば、圧電素子(ピエゾ素子)であり、印加される電圧に応じて圧電効果により変形するものである。
【0027】
したがって、制御装置2から電圧が印加されると、補正手段3は当該電圧に応じて変形する。その際、補正手段3はフォトマスク支持フレーム72に密着するように設置されているため、補正手段3の変形に応じてフォトマスク支持フレーム72及びフォトマスク71も変形して、フォトマスク71の変形(ねじれ、たわみなど)が補正される。
【0028】
(1.歪み検出手段)
図3に示すように、8組の歪み検出手段1a,1b,・・・,1hが外周フレーム72aの上面及び外側面に設置されている。なお、各歪み検出手段1a,1b,・・・,1hを総称して、歪み検出手段1と称することがあるものとする。
また、フォトマスク71の変形を補正する8個の補正手段3a,3b,・・・,3hが、内周フレーム72bの内部に設置されている。図3に示すように、それぞれの補正手段3のX−Y方向における設置位置は、それぞれの歪み検出手段1のX−Y方向における設置位置に対応している。
なお、各補正手段3a,3b,・・・,3hを総称して、補正手段3と称することがあるものとする。
【0029】
図3の部分拡大図に示すように、歪み検出手段1aは、X方向の歪みを検出する歪み検出手段1ax、Y方向の歪みを検出する歪み検出手段1ay、Z方向の歪みを検出する歪み検出手段1azを有している。
例えば、歪み検出手段1axは、外周フレーム72aの上面のX軸方向と平行に設置されている。そして、歪み検出手段1axは、外周フレーム72aのうち歪み検出手段1axが設置されている箇所がX方向に伸びた場合にはその抵抗値が大きくなり、X方向に縮んだ場合にはその抵抗値が下がるようになっている。歪み検出手段1ay,1azについても前記と同様である。そして、これらの歪み検出手段1ax,1ay,1azで一組の歪み検出手段1aを構成する。
また、他の7組の歪み検出手段1b,・・・,1hについても前記と同様のことがいえる。つまり、外周フレーム72aには、X,Y,Z方向の歪みを検出するための歪み検出手段が8組(つまり、合計24個の歪み検出手段1が)設置されている。
【0030】
また、図3に示すように、外周フレーム72aの四隅である隅部A,B,C,Dをそれぞれ挟むように、二組ずつの歪み検出手段1が設置されている。これは、外周フレーム72aの上面に設置されている高さ調整機構81(図2参照)の支持点の位置関係がくずれた場合、その影響による歪みが隅部A,B,C,D付近で最も大きく生じるからである。つまり、歪み検出手段1を外周フレーム72aの各隅部A,B,C,D付近に設置することによって、フォトマスク支持フレーム72の微少な変形(歪み)をより敏感に検出することができる。
【0031】
(2.制御装置)
図4は、歪み検出手段と、制御装置と、補正手段との関係を示すブロック図である。
制御装置2は、直流電圧出力手段21と、ブリッジ回路22と、歪み値算出手段23と、変形パターン記憶手段24と、変形パターン推定手段25と、補正量算出手段26と、電圧値算出手段27と、シャッター開閉手段28と、を備える。
図4に示すように、直流電圧出力手段21は、図示しない電源から供給される直流電圧を、各歪み検出手段1a,1b・・・,1hに対して出力する。
ブリッジ回路22は、歪み検出手段1を回路の一部として含み、各歪み検出手段1に対応して複数設けられている。そして、ブリッジ回路22は、直流電圧出力手段21から電圧が印加される2端子とは対角線の関係にある2端子間の電圧を増幅し、歪み値算出手段23に対して出力する(図5参照)。
【0032】
歪み値算出手段23は、直流電圧出力手段21及びブリッジ回路22から入力された電圧値に基づいて、フォトマスク支持フレーム72のうち、各歪み検出手段1が設置されている箇所での歪み値を算出し、変形パターン推定手段25に出力する。
変形パターン記憶手段24には、それぞれの歪み検出手段1の設置位置での歪み分布と、フォトマスク71の各変形パターンとが対応して記憶されている。
変形パターン推定手段25は、歪み検出手段1によって検出された歪み値の分布(歪み値算出手段23からの入力値)と、変形パターン記憶手段24から読み出した変形パターンとを比較して、フォトマスク71の変形パターンを推定する。そして、変形パターン推定手段25は、推定した変形パターン及びひずみ検出手段1の歪み値を補正量算出手段26に出力する。
【0033】
補正量算出手段26は、変形パターン推定手段25から入力された変形パターン及びひずみ検出手段1の歪み値に基づいて、フォトマスク71の変形を打ち消す補正量を算出し、当該補正量を電圧値算出手段27に出力する。
電圧値算出手段27は、補正手段3が前記補正量だけ変形するのに必要な電圧値を算出し、その電圧を補正手段3に対して出力する。
【0034】
シャッター開閉手段28は、圧電素子である補正手段3が変形に要するのに必要な時間ΔTを、図示しない記憶手段から読み出す。そして、シャッター開閉手段28は、電圧値算出手段27が補正手段3に対して電圧を出力した時刻t1を基準(時刻0)として、時刻t1から前記時間ΔTが経過したと判断した場合、シャッター61dに対して開指令の信号を出力する。ちなみに、シャッター開閉手段28は、前記時間ΔTに所定の余裕時間を加えた時間が経過した場合に、シャッター61dに対して開指令の信号を出力することとしてもよい。
そして、シャッター61dが開状態となった場合に、制御装置2は、水銀ランプ61aから光を放出させる。
【0035】
次に、制御装置2の各手段22〜27について詳細に説明する。
図5に示すように、例えば、ブリッジ回路22aは、歪み検出手段1ax,1ay,1azにそれぞれ対応して、これらの歪み検出手段を一部に含むブリッジ回路(ホイーストンブリッジ)22ax,22ay,22azを形成している。ちなみに、図5に示すブリッジ回路22axの歪み検出手段1axに接続された配線h1,h2は、制御装置2から出て歪み検出手段1axに接続されている(図3参照)。
【0036】
そして、例えば、ブリッジ回路22axの出力電圧Voxは、図示しない電圧増幅手段によって増幅されて、歪み値算出手段23axに出力される。
同様に、直流電圧出力手段21からブリッジ回路22ay,22azに対してそれぞれ所定の電圧Viが入力され、各出力電圧Voy,Vozが、図示しない電圧増幅手段によって増幅されて、歪み値算出手段23ay,23azに出力される。
【0037】
図4において、歪み値算出手段23は、ブリッジ回路22の各抵抗の抵抗値と、直流電圧出力手段21からの電圧値Vi及びブリッジ回路22からの各電圧値Voに基づいて、フォトマスク支持フレーム72のうち、各歪み検出手段1が設置されている箇所における歪み値を算出する。
ここで、歪み検出手段1の歪み値εは、以下の(式1)で求められる。なお、以下の(式1)において、Rは歪み検出手段1のゲージ抵抗、ΔRは歪み検出手段1が歪みを受けたときの抵抗変化量、Kはゲージ率である。
ε=ΔR/(K・R) ・・・(式1)
【0038】
このようにして、ブリッジ回路22としてホイーストンブリッジを採用することにより、温度変化の影響による検出誤差を少なくすることができる。また、歪み検出手段1の抵抗値の微少な変化を検出し、その抵抗値の変化に基づいて歪み値εを正確に算出することができる。
そして、X方向・Y方向・Z方向それぞれにおける歪みを検出する8組の歪み検出手段1a,1b,・・・,1hに対応して、24(=8×3)個の歪み値が算出される(図6参照)。
さらに、歪み値算出手段23は、各歪み検出手段1に対応した24個の歪み値を変形パターン推定手段25に出力する。ちなみに、前記歪み値は、高さ調整機構81によってフォトマスク71の高さ調整を行った際の歪み値を基準(歪み値ゼロ)とした場合の歪み値であり、高さ調整時からの歪み値の変化量を表す。
【0039】
変形パターン記憶手段24には、それぞれの歪み検出手段1の設置位置での歪み分布と、フォトマスク71の変形パターンとが対応して記憶されている。
なお、変形パターンとして、例えば、以下に示す(1)〜(6)の6通りのパターンがある。ただし、変形パターンは、以下に示す(1)〜(6)のパターンのみに限定されるものではない。
以下の記載において、例えば、「隅部Aが隅部Bに対して所定量だけ高い」とは、フォトマスク71がガラス基板51と略平行となっている状態から、隅部A(図3参照)が所定量だけ高くなる、及び/又は、隅部B(図3参照)が所定量だけ低くなる状態を指すものとする
【0040】
(1)隅部B,Dが隅部A,Cに対して所定量だけ高い状態。
(2)隅部B,Dが隅部A,Cに対して所定量だけ低い状態。
(3)隅部Aが隅部Bに対して所定量だけ高い、及び/又は、隅部Cが隅部Dに対して所定量だけ低い状態。
(4)隅部Aが隅部Bに対して所定量だけ低い、及び/又は、隅部Cが隅部Dに対して所定量だけ高い状態。
(5)隅部Bが隅部Cに対して所定量だけ高い、及び/又は、隅部Aが隅部Dに対して所定量だけ低い状態。
(6)隅部Bが隅部Cに対して所定量だけ低い、及び/又は、隅部Aが隅部Dに対して所定量だけ高い状態。
【0041】
図6に示すように、変形パターン記憶手段24には、それぞれの歪み検出手段1の設置位置(8箇所)及び検出される歪み方向(X、Y,Z方向)における24個の歪み値の分布と、上記の6個の変形パターンとが対応付けて記憶されている。ちなみに、図6に示す「変形パターン1」は、前記で示した6個の変形パターンのうち(1)に該当する。
【0042】
なお、図6に示す歪み値の分布において、例えば歪み値αとは、予め設定されたX方向における歪み値であり、変形パターンを推定する際の閾値となる。また、歪み値β,γについても同様である。
また、歪み値α,β,γは正の値であるものとする。例えば、変形パターン1に示すように、歪み検出手段1axの歪み値が「−(α以下)」であり、歪み検出手段1ayの歪み値が「−(β以下)」であるとは、前記各歪み値の符号が歪み検出手段1azの歪み値γの符号と反転しており、かつ、それぞれの歪み値の絶対値がα以下、β以下であるという条件を示している。
【0043】
また、図6に示す変形パターン1において、歪み測定手段1az,1ezに対応する閾値は、それぞれγとなっている(網掛け部分参照)。これは、歪み測定手段1az,1ezに対応して算出された歪み値のうちいずれか一方又は両方が、閾値γ以上であるという条件を示している。
これらの歪み値の分布と歪みパターンとの対応関係は、予め実験やシミュレーションを用いて取得され、歪みパターン記憶手段24に記憶されている。
【0044】
変形パターン推定手段25(図4参照)は、歪み値算出手段23からの入力値(24個の歪み値)と、変形パターン記憶手段24から読み出した各変形パターンに対応する歪み値の分布条件とを比較して、フォトマスク71の変形パターンを推定する。つまり、変形パターン推定手段25は、歪み値算出手段23からの入力されたそれぞれの歪み値の分布に基づいて、図6に示す6通りのうち、どの変形パターンに該当するかを推定する。
ちなみに、図6に示す6通りの変形パターンのいずれにも該当しない場合、変形パターン推定手段25は、フォトマスク71が変形していないものと判断する。
【0045】
そして、変形パターン推定手段25は、歪み値算出手段23から入力された24個の歪み値のうち、推定した変形パターンに対応する歪み値の分布条件において、Z方向での歪み値がγとして設定された箇所の歪み値を、補正量算出手段26(図4参照)に出力する。
例えば、変形パターン推定手段25は、図6に示す変形パターン1であると推定した場合には、網掛け部分で示す歪み検出手段1az,1ezに対応する2個の歪み値を補正量算出手段26に出力する。
これは、後記するように、補正手段3がフォトマスク支持フレーム72をZ方向に変形させることによって、フォトマスク71の変形(ねじれ、たわみなど)を補正するからである。
【0046】
補正量算出手段26は、変形パターン推定手段25から入力される歪み値に基づいて、フォトマスク71の変形を打ち消す補正量を算出し、当該補正量及び前記歪み値を与えた歪み検出手段1の識別情報を電圧値算出手段27に出力する。
図7は、Z方向歪み値と補正量との関係を示すグラフである。図7に示すように、Z方向歪み値と補正量とは比例関係となっている。なお、図7に示すZ方向歪み値と補正量との関係は、予め実験又はシミュレーションによって取得され、それぞれの変形パターンに対応して、補正量算出手段26の図示しない記憶部に記憶されているものとする。
例えば、図6の変形パターン1では、補正量算出手段26は、歪み検出手段1az,1ezに対応する2個の歪み値から、図7に示す関係に基づいて補正量を算出する。そして、補正量算出手段26は、算出した補正量(変形量)及び当該補正量だけ変形させる補正手段3の識別情報(補正手段3a,3eの識別情報)を電圧値算出手段27に出力する(図4参照)。
【0047】
ちなみに、前記したように、補正手段3のX−Y方向における設置位置は、歪み検出手段1のX−Y方向における設置位置に対応した配置となっている。例えば、歪み検出手段1azの歪み値(Z方向歪み値)を用いてフォトマスク71の変形を補正する場合、当該歪み検出手段1azに対応する補正手段3a(図3参照)を変形させることによって補正する。
【0048】
電圧値算出手段27は、補正手段3が前記補正量だけ変形するのに必要な電圧値を算出し、その電圧を補正手段3に対して出力する。なお、補正手段3の変形量(補正量)と、その際に印加される電圧との関係は図示しない記憶手段に記憶されている。電圧値算出手段27は、補正量算出手段26から入力される補正量と、前記記憶手段から読み出したデータに基づいて補正手段3に印加する電圧を算出し、当該電圧を補正手段3に出力する。また、電圧値算出手段27は、前記電圧を補正手段3に出力した時刻をシャッター開閉手段28に出力する。
【0049】
(3.補正手段)
補正手段3は圧電素子(ピエゾ素子)であり、印加される電圧に応じて変形するようになっている。
図8に示すように、フォトマスク支持フレーム72の内周フレーム72bには、補正手段3の設置位置に対応して、内周フレーム72bの内側面に対し垂直に穿たれた所定長の長穴部72cが形成されている。
なお、フォトマスク支持フレーム72の内周フレーム72bは、外周フレーム72a(図3参照)よりも軟質の(剛性が低い)部材で構成されている。つまり、内周フレーム72bは外周フレーム72aよりも変形しやすくなっている。
【0050】
また、図8(a)に示すように、長穴部72cの下側の内面と内周フレーム72bの下面との距離L2は、長穴部72cの上側の内面と内周フレーム72bの上面との距離L1よりも小さくなるように設計されている。これは、補正手段3がZ方向に伸縮した場合に、内周フレーム72bのうち、フォトマスク71が吸着されている側(下側)を変形しやすくするためである。
また、補正手段3は、長穴部72c内の上面及び下面に密着し、長穴部72c内で内周フレーム72bの上面に対して垂直方向に伸縮自在に設置されている。そして、補正手段3は、電圧値算出手段27から入力(印加)された電圧に応じて所定量だけ伸縮する。
【0051】
例えば、高さ調整機構81(図1参照)の支持点の高さ関係が外乱によってくずれ、図3に示すフォトフレーム72の隅部Bよりも隅部Aのほうが高くなったとする。この場合、フォトフレーム72が変形するため、図8(a)に示す右側の内周フレーム72bが変形する。そうすると、図示しないチャックによって内周フレーム72bの下面に吸着されているフォトフレーム71も、内周フレーム72bの変形に追従して変形することとなる。
【0052】
ここで、図8(b)に示すように、補正手段3aに電圧を印加して伸長させ、内周フレーム72bの伸縮方向における長さL3を大きくした場合、内周フレーム72bのうち補正手段3aの下面に密着している部分が下側に押圧され、長穴部72cの開口部がさらに開かれる。つまり、内周フレーム72bのうち、補正手段3aが設置されている部分が局部的に変形する。
そして、フォトマスク71は内周フレーム72bの変形に応じて変形し、図8(b)に示すようにフォトマスク71とガラス基板51(図2参照)とが略平行になる。
【0053】
ちなみに、図8(a)に示した場合とは逆に、フォトマスク71の右側が下がっている場合には、補正手段3aの前記長さL3を小さくするように変形させることによって、内周フレーム72bのうち補正手段3aの下面に密着している部分を上側に引き付ける。
【0054】
また、補正手段3を、図9(a)に示すように設置してもよい。この場合には、フォトマスク支持フレーム72の内周フレーム72bには、補正手段3の設置位置に対応して、内周フレーム72bの内側面に対し垂直に穿たれた所定長の第1長穴部72dが形成されている。また、第1長穴部72dと連通し、下方向に伸びることによって第1長穴部72dとともにL字状の長穴部を形成する第2長穴部72eが形成されている。このように補正手段3を設置することによって、内周フレーム72bをより薄く形成することができる。
なお、前記で説明したように、フォトマスク支持フレーム72の内周フレーム72bは、外周フレーム72a(図3参照)よりも軟質の(剛性が低い)部材で構成されている。
【0055】
また、第2長穴部72eの底面と内周フレーム72bの下面との距離L4が比較的小さくなるように設計されている。同様に、第1長穴部72dの底面に対向する第2長穴部72eの内壁面と内周フレーム72bの内側面との距離L5も比較的小さくなるように設計されている。これは、補正手段3の伸縮に応じて内周フレーム72bが変形しやすくするためである。
【0056】
補正手段3は、第2長穴部72e内で内周フレーム72bの内側面に対し垂直方向に伸縮自在に設置され、補正手段3の伸縮方向に対応する前記L字状の長穴部の内面と密着している。また、補正手段3は、電圧値算出手段27から入力(印加)された電圧に応じて所定量だけ伸縮する。
例えば、図9(a)に示すように、右側の内周フレーム72bが変形した場合、図9(b)に示すように、補正手段3aが伸長する。補正手段3aの伸縮方向における長さL6が大きくなった場合、補正手段3aの前記変形に追従して、内周フレーム72bが下側に押圧される。つまり、内周フレーム72bのうち、補正手段3aが設置されている部分が局部的に変形する。
そして、フォトマスク71が内周フレーム72bの変形に応じて変形し、図9(b)に示すフォトマスク71とガラス基板51(図2参照)とが略平行になる。
【0057】
<転写処理の概要>
図1、図2に示した液晶露光装置100において、フォトマスク71の下面のパターンをガラス基板51に転写する一連の動作は、以下のとおりである。
まず、搬送ロボット(図示せず)が、ガラス基板51をチャック43a(図2参照)上に置き、チャック43aがガラス基板51を真空吸着する。次に、制御装置2の指令に従って、アクチュエータ(図示せず)がXステージ42と、Yステージ43とをそれぞれ所定の位置に移動させる。そして、制御装置2の指令に従って、高さ調整機構81(図2参照)がフォトマスク71とガラス基板51が平行かつ数十〜数百μmの間隔になるように調整する。なお、前記のようにいったん高さ調整した後は、転写が終了するまで高さ調整機構81を用いた調整は行わない。
【0058】
次に、制御装置2は、歪み検出手段1によって検出された歪みの分布に基づいて、補正手段3に所定の電圧を印加し、補正手段3を変形させることによりフォトマスク71の変形(ねじれ、たわみなど)を補正する。その後、制御装置2からの指令に従ってシャッター61d(図2参照)が開き、水銀ランプ61a(図2参照)の光を通過させてフォトマスク71の下面のパターンをガラス基板51に転写する。
【0059】
なお、フォトマスク71のパターンをガラス基板51に1回転写することによって、当該ガラス基板51に対する転写処理が終了するとは限らない。つまり、フォトマスク71のサイズに対してガラス基板51のサイズが大きい場合には、1枚のガラス基板51に対して複数回(例えば、4回)の転写を行うこととなる。この場合、制御装置2は、転写ごとにXステージ機構42(図1参照)及びYステージ機構43(図1参照)を駆動することによって、ガラス基板51の位置を所定の転写位置に移動させる。
【0060】
さらに、制御装置2は、フォトマスク71のパターンを転写する各転写位置にガラス基板51を移動させる毎に補正手段3の変形量(補正量)を算出し、当該補正量に対応する電圧を補正手段3に出力する。
【0061】
<フォトマスクの変形補正処理の処理手順>
図10は、制御装置におけるフォトマスクの変形補正処理の流れを示すフローチャートである。
まず、ステップS101で、制御装置2の歪み値算出手段23(図4参照)は、直流電圧出力手段21から入力される電圧値、及び、各歪み検出手段1に対応するブリッジ回路22から入力される電圧値に基づいて、各歪み値を算出する。
【0062】
ステップS102で、制御装置2の変形パターン推定手段25(図4参照)は、歪み値が所定値以上であるか否かを判断する。より具体的には、変形パターン推定手段25は、変形パターンごとに特定の歪み検出手段1(例えば、変形パターン1の場合には、歪み検出手段1az,1bx,1ez,1fx:図6参照)の歪み値が所定値以上であるか否かを判断する。
ステップS102で、歪み値が所定値以上である場合(ステップS102→Yes)、制御装置2の処理はステップS103に進む。また、ステップS102で、歪み値が所定値未満である場合(ステップS102→No)、制御装置2の処理はステップS107に進む。
【0063】
ステップS103で、変形パターン推定手段25(図4参照)は、歪み値算出手段23によって算出された歪み値の分布から、フォトマスク71の変形パターンを推定(特定)する。
ステップS104で、制御装置2の補正量算出手段26(図4参照)は、歪み値から補正量を算出する。より具体的には、補正量算出手段26は、ステップS103で推定した変形パターンに対応する歪み値の分布条件において、Z方向での歪み値が所定値(α)以上として設定された歪み検出手段1の歪み値(例えば、変形パターン1では、歪み検出手段1az,1ezの歪み値:図6参照)から、補正量を算出する。
【0064】
ステップS105で、制御装置2の電圧値算出手段27(図4参照)は、前記補正量に基づいて、当該補正量だけ補正手段(圧電素子)3を変形させるための電圧値を算出し、特定の補正手段3(例えば、変形パターン1に該当する場合には、補正手段3a,3e:図6参照)に前記電圧を出力する。
ステップS106で、制御装置2のシャッター開閉手段28(図4参照)は、電圧値算出手段27が補正手段3に対して電圧を出力した時刻から補正処理時間が経過下か否かを判断する。ちなみに、補正処理時間とは、前記したように補正手段3が電圧を印加されてから変形を終えるまでに要する時間(+所定の余裕時間)である。
【0065】
ステップS106で、補正処理時間が経過した場合、制御装置2の処理はステップS107に進む。ステップS106で、補正処理時間が経過していない場合、シャッター開閉手段28はステップS106の処理を繰り返す。
ステップS107で、シャッター開閉手段28は、シャッター61d(図2参照)に内蔵されているシャッター開閉回路(図示せず)対して、シャッター開指令信号を出力する。
【0066】
<効果>
本実施形態に係る液晶露光装置100によれば、制御装置2が、歪み検出手段1によって検出された歪みの分布を、変形パターン記憶手段24に記憶されている各変形パターンにおける歪み値の分布と比較することによって、フォトマスク71の変形パターンを適切かつ容易に推定することができる。
【0067】
外周フレーム72aの上面に設置されている高さ調整機構81(図2参照)の位置関係がくずれた場合に、その影響によって最も変形しやすいのは、隅部A,B,C,D(図3参照)付近である。したがって、隅部A,B,C,D付近に設置されている歪み検出手段1によって高さ調整機構81の位置関係のずれによって生じるフォトマスク支持フレーム72の微少な歪みを検出することができる。
【0068】
また、補正手段3は、フォトマスク支持フレーム72のうちの内周フレーム72bに設置されている。当該内周フレーム72bは、外周フレーム72aよりも剛性が低い部材で構成されているため、補正手段3の変形に応じて変形しやすくなっている。つまり、補正手段3の伸縮を内周フレーム72b及びフォトマスク71の変形に適切に反映させることができる。
一方、外周フレーム72aは内周フレーム72bよりも剛性が高い部材で構成されているため、補正手段3の伸縮に伴う内周フレーム72bの変形の影響を受けることがない。したがって、外周フレーム72a及び高さ調整機構81に余計な応力がかからず、フォトマスク71を安定して支持することができる。
【0069】
このようにして、液晶露光装置100は、フォトマスク支持フレーム72の一部を変形させることによって、フォトマスク71の変形(ねじれ、たわみなど)を補正することができる。したがって、フォトマスク71とガラス基板51とを平行にすることにより、転写精度を向上させることができる。
【0070】
また、従来技術では、フォトマスク71が変形してしまった場合、フォトマスク71の全面の変形を測定するか、ガラス基板51への転写結果から変形の度合いを判断していた。そして、高さ調整機構81を微少に動かすことにより、フォトマスク71の変形を補正していた。このように、従来技術では、フォトマスク71が変形した場合の補正に長時間を要し、生産性が低下してしまうという問題があった。
これに対して本実施形態に係る液晶露光装置100では、いったん高さ調整を行った後は転写が終了するまで高さ調整を行わず、フォトマスク支持フレーム72に設置された補正手段3を変形させることによって短時間でフォトマスク71の変形(ねじれ、たわみなど)を補正し、生産性の向上を図ることができる。
【0071】
≪第2実施形態≫
第1実施形態では、歪み検出手段1として歪みゲージを用いたが、第2実施形態では、歪み検出手段1として不純物拡散抵抗で構成されるブリッジ回路を用いる点が異なる。その他の構成については、第2実施形態は第1実施形態と同様である。
したがって、第1実施形態と異なる部分について説明し、重複する部分については説明を省略する。
【0072】
図11に示すように、歪み検出手段1は、フォトマスク支持フレーム72の外周フレーム72aの上面及び側面に設置されている。
なお、各歪み検出手段1a(1a1,1a2:以下、同様である。),1b,・・・,1hの設置位置は、第1実施形態で説明した各歪み検出手段1a,1b,・・・,1h(図3参照)の設置位置に対応している。ちなみに、各補正手段3の設置位置は、第1実施形態の場合と同様である。
【0073】
また、歪み検出手段1はp型不純物拡散抵抗であり、外部から応力が加わることによって変形し、当該変形に対応して抵抗値が変化するようになっている。図11の部分拡大図に示すように、外周フレーム72aの上面に設置されたシリコン基板1a1上に、4個のp型不純物拡散抵抗101,102,103,104が設置されている。また、p型不純物拡散抵抗101,103は、自身が設置される外周フレーム72aの稜線に平行になるように設置されている。また、p型不純物拡散抵抗102,104は、自身が設置される外周フレーム72aの稜線に垂直になるように設置されている。
また、外周フレーム72aの側面に設置されたシリコン基板1a2上に、4個のp型不純物拡散抵抗105,106,107,108が設置されている。なお、各抵抗の配置は前記したものと同様であるから、説明を省略する。
【0074】
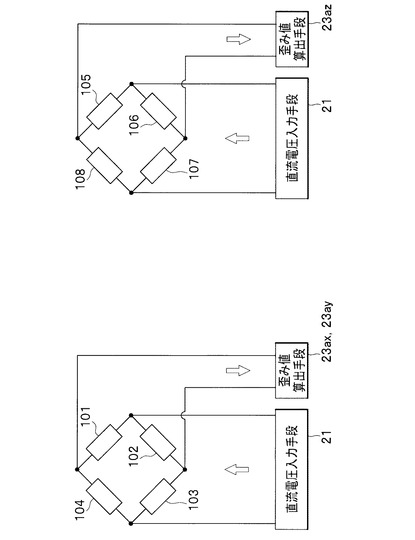
ここで、各p型不純物拡散抵抗は、自身に電流が流れる方向(長手方向)が、シリコン基板1a1,1a2の結晶方位と一致するように設置されている。これによって、図12に示すように、p型不純物拡散抵抗101,102,103,104、及び、p型不純物拡散抵抗105,106,107,108がそれぞれ接続されて、ホイーストンブリッジを構成している。
また、図12に示すように、2個のホイーストンブリッジは、制御装置2の直流電流入力手段21と、歪み値算出手段23(23ax,23ay,23az)に接続されている。つまり、図11に示す各シリコン基板1a1,1a2・・・1h1,1h2に設置されたそれぞれのp型不純物拡散抵抗で構成されるブリッジ回路が、図4に示すブリッジ回路22に相当する。
【0075】
このように各p型不純物拡散抵抗を配置することにより、ピエゾ抵抗効果によって大きな抵抗値の変化が得られ、高感度で外周フレーム72aの歪みを検出することができる。
なお、歪みを検出した後の制御装置2の動作は、第1実施形態で説明したものと同様であるから、説明を省略する。
【0076】
<効果>
本実施形態に係る液晶露光装置100Aによれば、歪み検出手段1としてp型不純物拡散抵抗を用いる。これによって、当該歪み検出手段1は、その内部に微細なブリッジ回路を形成することとなる。したがって、前記ブリッジ回路が小さく内部を磁束が通り抜け難くなり、ブリッジ回路に対する電磁ノイズの影響を低減することができる。
【0077】
また、p型不純物拡散抵抗を用いた歪み検出手段1は、歪みゲージを用いた歪み検出手段に比べ温度の影響を受けにくく、かつ、より高感度である。したがって、p型不純物拡散抵抗を用いた歪み検出手段1を用いることで、高精度な歪み測定が可能となる。これによって制御装置2は、外周フレーム72aの変形パターンをより適切に推定し、かつ、フォトマスク71をガラス基板51と平行にするための補正量も適切に算出することが可能となる。
【0078】
≪変形例≫
以上、本発明に係る液晶露光装置について、各実施形態により説明したが、本発明の趣旨はこれらの記載に限定されるものではなく、種々の変更などを行うことができる。
例えば、第1実施形態では、歪み検出手段1(図3参照)を外周フレーム72aの上面及び外側面に設置することとしたが、これに限らない。すなわち、X方向又はY方向の歪みを検出する歪み検出手段1を外周フレーム72aの下面又は内部に設けてもよい。
ちなみに、歪み検出手段1を外周フレーム72aの内部に設ける場合には、例えば、外周フレーム72aの上面に対して平行な長穴部(図示せず)を設け、当該長穴部の上側又は下側の内面に歪み検出手段1を設置することとすればよい。
同様に、Z方向の歪みを検出する歪み検出手段1を外周フレーム72aの内側面又は内部に設置することとしてもよい。
【0079】
また、第1実施形態では、X方向の歪み検出手段1と、Y方向の歪み検出手段1とをX−Y平面上において異なる位置に設置していたが(図3参照)、これに限らない。すなわち、X方向の歪み検出手段1と、Y方向の歪み検出手段1とを積層させることとしてもよい。
【0080】
また、第1実施形態では、歪み検出手段1を一部に含むブリッジ回路22によって歪みを検出することとしたが、これに限らない。例えば、歪み検出手段1として圧電体(図示せず)付近に超電導体(図示せず)を設置し、移動電界の作用で超電導体中のキャリアの抵抗率を測定することによって、歪みを検出することとしてもよい。この場合には、歪み検出手段1と制御装置2とを非接触とすることができる。
【0081】
また、前記各実施形態では、ブリッジ回路22(図4参照)としてホイーストンブリッジを用いた例を示したが、これに限らない。すなわち、歪み検出手段1の微少な抵抗値の変化を検出できるものであれば、他のブリッジ回路を用いてもよい。
また、前記各実施形態では、補正手段3として圧電素子(ピエゾ素子)を用いたが、これに限らない。例えば、補正手段3として、空圧又は油圧で駆動するアクチュエータを使用してもよい。
【0082】
また、前記各実施形態では、8個の補正手段3を内周フレーム72bに設置することとしたが、これに限らない。前記したように、補正手段3の伸縮によって、内周フレーム72bのうち補正手段3aが設置されている部分が局部的に変形する。したがって、補正手段3を多数設けることによって、より高次の変形にも対応できる。
また、第2実施形態では、歪み検出手段1としてp型不純物拡散抵抗を用いたが、p型不純物拡散抵抗に代えてn型不純物拡散抵抗を用いてもよい。
【0083】
また、前記した各実施形態では、フォトマスク支持フレーム72(図3参照)を、外周フレーム72aと、外周フレーム72aに対して剛性が低い内周フレーム72bとを一体で形成することとしたが、これに限らない。すなわち、外周フレーム72aと内周フレーム72bとを同じ部材で形成してもよい。この場合でも、例えば、図8の長さL2で示す部分を肉薄に形成することによって、補正手段3がZ方向に伸縮した場合に、内周フレーム72bのうち、フォトマスク71が吸着されている側(下側)が変形しやすくなる。
【0084】
また、前記した各実施形態では、フォトマスク支持フレーム72(図3参照)の外周フレーム72aに歪み検出手段1を設置することとしたが、これに限らない。すなわち外周フレーム72aに代えて、内周フレーム72bに歪み検出手段1を設置することとしてもよい。
【0085】
また、前記した各実施形態では、フォトマスク支持フレーム72(図3参照)の内周フレーム72bに補正手段3を設置することとしたが、これに限らない。すなわち内周フレーム72bに代えて、外周フレーム72aに補正手段3を設置することとしてもよい。この場合には、外周フレーム72aのうち、垂直方向に見てフォトマスク71が吸着されている領域まで穿たれた溝部を形成し、例えば、図8の長さL2に示す部分と同様に、フォトマスク71が吸着される側を肉薄にする。これによって、外周フレーム72aに設置された補正手段3の変形に追従して、フォトマスク71も変形することとなる。
【0086】
また、前記した各実施形態では、歪み検出手段1と補正手段3とが1対1で対応していることとしたが、これに限らない。すなわち、例えば、歪みパターンの数(上記各実施形態では6パターン)に対応して所定箇所に補正手段3を設置することとしてもよい。
【符号の説明】
【0087】
100,100A 液晶露光装置
1,1a,1b,1c,1d,1e,1f,1g,1h 歪み検出手段
2 制御装置
21 直流電圧出力手段(制御手段)
22 ブリッジ回路
23 歪み値算出手段(制御手段)
24 変形パターン記憶手段
25 変形パターン推定手段(制御手段)
26 補正量算出手段(制御手段)
27 電圧値算出手段(制御手段)
3,3a,3b,3c,3d,3e,3f,3g,3h 補正手段
42 Xステージ機構(ステージ機構)
43 Yステージ機構(ステージ機構)
51 ガラス基板
71 フォトマスク
72 フォトマスク支持フレーム
72a 外周フレーム
72b 内周フレーム
72c 長穴部
72d 第1長穴部
72e 第2長穴部
81 高さ調整機構
A,B,C,D 隅部
101,102,103,104,105,106,107,108 p型不純物拡散抵抗(不純物拡散抵抗)
【特許請求の範囲】
【請求項1】
フォトマスクとガラス基板とを所定の間隔で対向配置し、前記フォトマスクのパターンを前記ガラス基板に転写する液晶露光装置において、
前記ガラス基板を前記フォトマスクに対して相対的に移動させるステージ機構と、
前記フォトマスクを支持するフォトマスク支持フレームと、
前記フォトマスク支持フレームの各位置での歪みを検出する複数の歪み検出手段と、
前記フォトマスクの変形を補正する補正手段と、
前記歪み検出手段の各位置での歪み分布と、前記フォトマスクの変形パターンと、が対応して記憶されている変形パターン記憶手段と、
前記ステージ機構を駆動させて前記ガラス基板を転写位置に移動させ、
前記歪み検出手段によって検出された歪み分布と、前記変形パターン記憶手段から読み出した変形パターンの歪み分布とを比較して、前記フォトマスクの変形パターンを推定し、
推定した前記変形パターン、及び、前記歪み検出手段によって検出された歪み量に基づいて、前記フォトマスクの変形を打ち消す補正量を算出し、当該補正量に対応する電圧を前記補正手段に対して出力する制御手段と、を備えること
を特徴とする液晶露光装置。
【請求項2】
前記フォトマスク支持フレームは、一体に形成された外周フレームと、内周フレームとを有し、
複数の前記歪み検出手段は、前記外周フレームに設置され、
前記補正手段は、前記内周フレームに設置されていること
を特徴とする請求項1に記載の液晶露光装置。
【請求項3】
前記フォトマスク支持フレームは、前記外周フレームの剛性に対して前記内周フレームの剛性が低くなるように構成されていること
を特徴とする請求項2に記載の液晶露光装置。
【請求項4】
前記制御手段は、前記ステージ機構を駆動することによって、前記フォトマスクのパターンを転写する各転写位置に前記ガラス基板を移動させる毎に、前記補正量を算出し、当該補正量に対応する電圧を前記補正手段に対して出力すること
を特徴とする請求項1から請求項3のいずれか一項に記載の液晶露光装置。
【請求項5】
前記歪み検出手段は、外部から応力が加わることによって変形し、当該変形に対応して抵抗値が変化する歪みゲージであること
を特徴とする請求項1から請求項4のいずれか一項に記載の液晶露光装置。
【請求項6】
前記歪み検出手段は、外部から応力が加わることによって変形し、当該変形に対応して抵抗値が変化する不純物拡散抵抗で構成されるブリッジ回路であること
を特徴とする請求項1から請求項4のいずれか一項に記載の液晶露光装置。
【請求項7】
前記内周フレームには、前記補正手段の設置位置に対応して、当該内周フレームの内側面に対し垂直に穿たれた長穴部が形成され、
前記補正手段は、前記長穴部内で前記内周フレームの上面に対して垂直方向に伸縮自在に設置され、前記長穴部内の上面及び下面に密着していること
を特徴とする請求項2から請求項6のいずれか一項に記載の液晶露光装置。
【請求項8】
前記内周フレームには、前記補正手段の設置位置に対応して、当該内周フレームの内側面に対し垂直に穿たれた第1長穴部と、
前記第1長穴部と連通し、下方向に伸びることによって前記第1長穴部とともにL字状の長穴部を形成する第2長穴部と、が形成され、
前記補正手段は、前記第2長穴部内で前記内周フレームの内側面に対し垂直方向に伸縮自在に設置され、前記L字状の長穴部の前記伸縮方向に対応する内面と密着していること
を特徴とする請求項2から請求項6のいずれか一項に記載の液晶露光装置。
【請求項9】
フォトマスクとガラス基板とを所定の間隔で対向配置し、前記フォトマスクのパターンを前記ガラス基板に転写する液晶露光装置の露光処理方法において、
ステージ機構を駆動させて前記ガラス基板を転写位置に移動させるステップと、
前記フォトマスクを支持するフォトマスク支持フレームの各位置での歪みを、複数の歪み検出手段を用いて検出するステップと、
複数の前記歪み検出手段によって検出された歪み分布と、変形パターン記憶手段から読み出した変形パターンの歪み分布とを比較して、前記フォトマスクの変形パターンを推定するステップと、
推定した前記変形パターン、及び、前記歪み検出手段によって検出された歪み量に基づいて、前記フォトマスクの変形を打ち消す補正量を算出するステップと、
当該補正量に対応する電圧を、前記フォトマスクの変形を補正する補正手段に対して出力するステップと、有すること
を特徴とする露光処理方法。
【請求項1】
フォトマスクとガラス基板とを所定の間隔で対向配置し、前記フォトマスクのパターンを前記ガラス基板に転写する液晶露光装置において、
前記ガラス基板を前記フォトマスクに対して相対的に移動させるステージ機構と、
前記フォトマスクを支持するフォトマスク支持フレームと、
前記フォトマスク支持フレームの各位置での歪みを検出する複数の歪み検出手段と、
前記フォトマスクの変形を補正する補正手段と、
前記歪み検出手段の各位置での歪み分布と、前記フォトマスクの変形パターンと、が対応して記憶されている変形パターン記憶手段と、
前記ステージ機構を駆動させて前記ガラス基板を転写位置に移動させ、
前記歪み検出手段によって検出された歪み分布と、前記変形パターン記憶手段から読み出した変形パターンの歪み分布とを比較して、前記フォトマスクの変形パターンを推定し、
推定した前記変形パターン、及び、前記歪み検出手段によって検出された歪み量に基づいて、前記フォトマスクの変形を打ち消す補正量を算出し、当該補正量に対応する電圧を前記補正手段に対して出力する制御手段と、を備えること
を特徴とする液晶露光装置。
【請求項2】
前記フォトマスク支持フレームは、一体に形成された外周フレームと、内周フレームとを有し、
複数の前記歪み検出手段は、前記外周フレームに設置され、
前記補正手段は、前記内周フレームに設置されていること
を特徴とする請求項1に記載の液晶露光装置。
【請求項3】
前記フォトマスク支持フレームは、前記外周フレームの剛性に対して前記内周フレームの剛性が低くなるように構成されていること
を特徴とする請求項2に記載の液晶露光装置。
【請求項4】
前記制御手段は、前記ステージ機構を駆動することによって、前記フォトマスクのパターンを転写する各転写位置に前記ガラス基板を移動させる毎に、前記補正量を算出し、当該補正量に対応する電圧を前記補正手段に対して出力すること
を特徴とする請求項1から請求項3のいずれか一項に記載の液晶露光装置。
【請求項5】
前記歪み検出手段は、外部から応力が加わることによって変形し、当該変形に対応して抵抗値が変化する歪みゲージであること
を特徴とする請求項1から請求項4のいずれか一項に記載の液晶露光装置。
【請求項6】
前記歪み検出手段は、外部から応力が加わることによって変形し、当該変形に対応して抵抗値が変化する不純物拡散抵抗で構成されるブリッジ回路であること
を特徴とする請求項1から請求項4のいずれか一項に記載の液晶露光装置。
【請求項7】
前記内周フレームには、前記補正手段の設置位置に対応して、当該内周フレームの内側面に対し垂直に穿たれた長穴部が形成され、
前記補正手段は、前記長穴部内で前記内周フレームの上面に対して垂直方向に伸縮自在に設置され、前記長穴部内の上面及び下面に密着していること
を特徴とする請求項2から請求項6のいずれか一項に記載の液晶露光装置。
【請求項8】
前記内周フレームには、前記補正手段の設置位置に対応して、当該内周フレームの内側面に対し垂直に穿たれた第1長穴部と、
前記第1長穴部と連通し、下方向に伸びることによって前記第1長穴部とともにL字状の長穴部を形成する第2長穴部と、が形成され、
前記補正手段は、前記第2長穴部内で前記内周フレームの内側面に対し垂直方向に伸縮自在に設置され、前記L字状の長穴部の前記伸縮方向に対応する内面と密着していること
を特徴とする請求項2から請求項6のいずれか一項に記載の液晶露光装置。
【請求項9】
フォトマスクとガラス基板とを所定の間隔で対向配置し、前記フォトマスクのパターンを前記ガラス基板に転写する液晶露光装置の露光処理方法において、
ステージ機構を駆動させて前記ガラス基板を転写位置に移動させるステップと、
前記フォトマスクを支持するフォトマスク支持フレームの各位置での歪みを、複数の歪み検出手段を用いて検出するステップと、
複数の前記歪み検出手段によって検出された歪み分布と、変形パターン記憶手段から読み出した変形パターンの歪み分布とを比較して、前記フォトマスクの変形パターンを推定するステップと、
推定した前記変形パターン、及び、前記歪み検出手段によって検出された歪み量に基づいて、前記フォトマスクの変形を打ち消す補正量を算出するステップと、
当該補正量に対応する電圧を、前記フォトマスクの変形を補正する補正手段に対して出力するステップと、有すること
を特徴とする露光処理方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−101272(P2013−101272A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−245746(P2011−245746)
【出願日】平成23年11月9日(2011.11.9)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月9日(2011.11.9)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]