
液状物吐出装置および方法
【課題】塗布用針を塗布対象に当接させることなく、微少な液滴を塗布対象の塗布面に的確に塗布できる液滴塗布装置を提供する。
【解決手段】塗布液を収納する塗布液収納部を通って塗布用針を降下させることにより塗布対象の塗布面に液滴を塗布する液滴塗布装置であって、塗布用針を振動させるための針振動手段と、塗布用針の振動を検出するための針振動検出手段と、針振動検出手段の検出出力において、針先端に付着した液滴が塗布対象の塗布面に接触していないときの塗布用針の共振周波数と液滴が塗布面に接触しているときの共振周波数が異なる性質を利用して針の降下動作を制御する針位置制御手段とを備える。
【解決手段】塗布液を収納する塗布液収納部を通って塗布用針を降下させることにより塗布対象の塗布面に液滴を塗布する液滴塗布装置であって、塗布用針を振動させるための針振動手段と、塗布用針の振動を検出するための針振動検出手段と、針振動検出手段の検出出力において、針先端に付着した液滴が塗布対象の塗布面に接触していないときの塗布用針の共振周波数と液滴が塗布面に接触しているときの共振周波数が異なる性質を利用して針の降下動作を制御する針位置制御手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液状物を吐出するための液状物吐出装置の塗布機構に関する。特に、本発明は、微少液滴塗布機構において、ばねを介して塗布用針に加えた振動の変化を利用して塗布用針の位置制御を行う機構に関する。
【背景技術】
【0002】
近年、微少量の液滴の生成・分注技術は、μTAS分野における化学分析やバイオ産業における薬品生成の過程において重要な役割を担っている。微少量の液滴を吐出できる装置として、高粘度の液体をpl(ピコリットル)オーダーで塗布することができるニードル式微少液滴塗布機構が提案されている。このニードル式微少液滴塗布機構は、中空の極細ガラス管と極細針(以下では塗布用針とする)から構成され、試料液体の入ったガラス管の中を通過した塗布用針を塗布面に接触させることで、微少量の液滴を塗布することができる。
【0003】
ところがこの種の従来の液滴塗布装置は、塗布用針の先端を塗布対象の塗布面に押し当てるため、押し当てた状態において試料液体が多量に塗布面へ流れ込んだり、当接した塗布用針の先端付近が曲がったり、塗布対象の塗布面を損傷させたりするといった問題があった。これらの問題を解決するために、塗布用針に取り付けた歪ゲージセンサの出力を利用して、塗布用針の歪み、撓み、および捻れ現象を検知し、塗布用針や塗布面の破損を防ぐ手段が提唱されている(特許文献1)。しかし、ニードル式微少液滴塗布機構では、通常、塗布用針の先端が非常に細いため、塗布用針と塗布面が接触した際に生じる塗布面や塗布用針の損傷が問題となるため、塗布用針は、非接触であることが理想的である。
【0004】
非接触で塗布用針を制御する手段として、顕微鏡画像や光電センサを使用して、塗布用針を塗布対象に当接させることなく微少な液滴を塗布面に的確に塗布できるようにした液滴塗布装置が提案されている(たとえば、特許文献2)。しかし、このような顕微鏡画像や光電センサを使用した塗布用針の位置決め手段では、装置の規模およびコストが大幅に増加してしまった。また、光電センサを使用する場合では、ビームの反射位置を塗布用針の真下に正確に調整する必要がある。しかし、ビームの反射位置調整には数十μmオーダーの微調整が必要であるため、この反射位置調整は非常に困難な作業であった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特願2008-208312号
【特許文献2】特開2008-191091公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、塗布用針を塗布対象に当接させることなく、微少な液滴を塗布対象の塗布面に的確に塗布できる液滴塗布装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明者は、塗布用針を塗布対象に当接させることなく微少な液滴を塗布面に的確に塗布できるようにするために、塗布用針の振動特性変化を利用することに想到し、本発明に至った。本特許は、圧電素子などを使用して、板ばねを介して塗布用針に微少振動を与え、その振動特性の変化から針の先端に付着した微少液滴と塗布面との接触を検出することに基づいた液滴塗布装置および液滴塗布方法を提供する。
【0008】
本発明は、塗布液を収納する塗布液収納部を通って塗布用針を降下させることにより塗布対象の塗布面に液滴を塗布する液滴塗布装置であって、
塗布用針を振動させるための針振動手段と、
塗布用針の振動を検出するための針振動検出手段と、
針振動検出手段の検出出力において、塗布用針の先端に付着した液滴が塗布対象の塗布面に接触していないときの針振動の共振周波数と前記液滴が前記塗布面に接触しているときの共振周波数が異なる性質を利用して、塗布用針の降下動作を制御する針位置制御手段を備えることを特徴とする、液滴塗布装置を提供する。
【0009】
また、本発明は、針振動検出手段が、塗布用針の振動変位のエンベロープを時間微分した値の絶対値が一定値以下となったことを検知したときに、塗布用針の降下動作を停止させることを特徴とする、上記液滴塗布装置を提供する。
【0010】
また、本発明は、塗布用針を振動させるための針振動手段の駆動周波数が、塗布用針の先端に液滴が付着していない状態での針振動の共振周波数の整数倍または整数分の1倍になることを特徴とする、液滴塗布装置を提供する。
【0011】
また、本発明は、針振動手段が圧電素子であることを特徴とする、液滴塗布装置を提供する。
【0012】
また、本発明は、針振動検出手段が抵抗法センサ、電磁誘導法センサまたは静電容量法センサであることを特徴とする、液滴塗布装置を提供する。
【0013】
さらに、本発明は、塗布液を収納する塗布液収納部を通って塗布用針を降下させることにより塗布対象の塗布面に液滴を塗布する液滴塗布方法であって、
塗布用針を振動させるための針振動工程と、
塗布用針の振動を検出するための針振動検出工程と、
針振動検出手段の検出出力によって前記塗布用針の降下動作を制御する針位置制御工程を備えることを特徴とする、液滴塗布方法を提供する。
【発明の効果】
【0014】
本発明によれば、塗布用針の先端に付着した液滴が塗布面に接触したことを検出して、塗布用針の降下を停止させることができる。これにより、塗布用針を塗布対象に当接させずに、的確に塗布液の液滴を塗布面に塗布することができる液滴塗布装置および液滴塗布方法を実現することができる。
【図面の簡単な説明】
【0015】
【図1】本発明に従った液滴塗布装置の一実施態様の略先的ブロック図。
【図2】本発明に従った液滴塗布装置本体の一実施態様を示す図。
【図3】本発明に従った液滴塗布装置本体の液滴塗布動作を示す図。
【図4】本発明に従った液滴塗布装置の塗布用針の動作を示す図。
【図5】塗布用針の先端に付着した液滴と塗布面が非接触の場合の塗布用針の変位を示す図。
【図6】塗布用針の先端に付着した液滴と塗布面が接触している場合の塗布用針の変位を示す図。
【図7】塗布用針の先端に付着した液滴と塗布面が時間0〜3秒まで非接触であるが、時間3〜10秒において接触している場合の塗布用針の振動の変位を示す図。
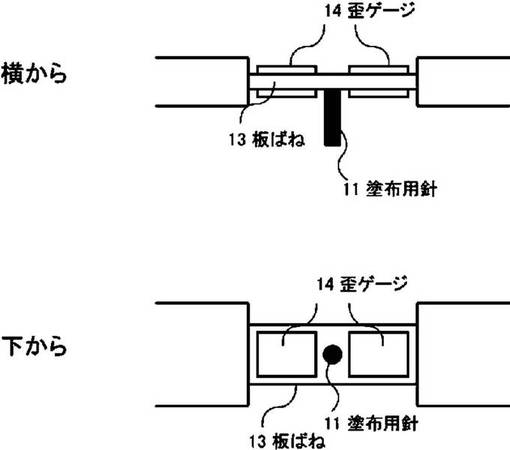
【図8】本発明に従った液滴塗布装置の針振動検出手段としての歪ゲージの一態様を示す図。
【図9】本発明に従った液滴塗布装置の針振動検出手段としての歪ゲージおよびブリッジ回路の一態様を示す図。
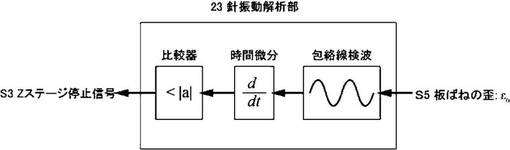
【図10】針振動解析部の構成の一態様を示す図。
【図11】駆動周波数が塗布用針の共振周波数の整数倍である場合と整数倍ではない場合の塗布用針の振動特性の違いを示す図。
【発明を実施するための形態】
【0016】
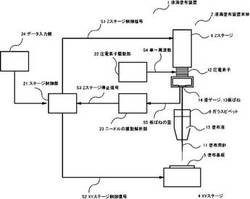
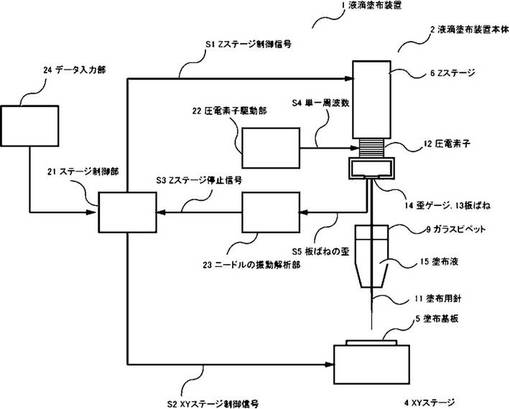
以下、本発明の液滴塗布装置を、図面を参照して詳述する。図1は、本発明に従った液滴塗布装置の一実施態様のブロック図である。液滴塗布装置1は、液滴塗布装置本体2を有する。
【0017】
液滴塗布装置本体2は、図1に示すように、XYステージ4およびZステージ6を有する。Zステージ6は、XYステージ4上の塗布基板5の表面(以下では単に塗布面とする)に上方から対向するように設けられている。
【0018】
また、Zステージ6には、針振動手段としての圧電素子12が取り付けられ、さらに板ばね13に取り付けられた針振動検出手段としての歪ゲージ14を備えている。XYステージ4上には、塗布液15が塗布される塗布基板5が載置される。また、Zステージ6には、圧電素子12、板ばね13を介して塗布用針11が取り付けられている。また、塗布用針11は、塗布液15の液滴が塗布される塗布基板5の塗布面に対して上方から対向するように設けられている。
【0019】
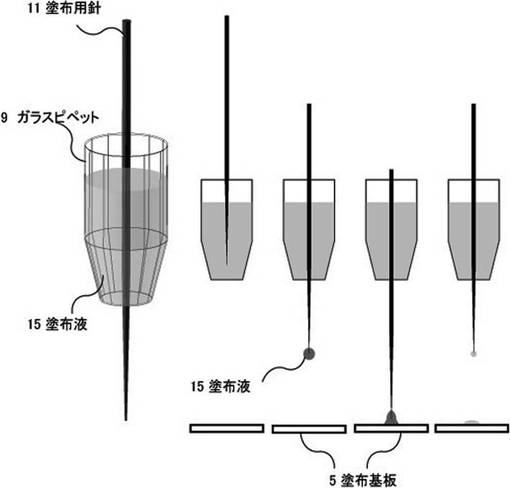
塗布用針11は、図4に示したように作動する。最初、塗布用針11の先端は、塗布液収納部(ガラスピペット9)の塗布液15中にある。次いで、塗布用針11がガラスピペット9から下方に移動する。このとき、塗布用針11の先端には、塗布液15の一部が液滴として付着する。塗布用針11がさらに下方に移動して、塗布用針11の先端に付着している塗布液15の液滴が、塗布基板5の塗布面に接触する。その後、塗布用針11は、上昇して、塗布液収納部の塗布液15中に収納される。
【0020】
本発明の液滴塗布装置は、上記のように塗布液を塗布する際に、塗布用針の振動特性変化を利用して塗布用針の位置を制御する。以下に、塗布用針の振動特性変化を利用して塗布用針の位置を制御する方法を説明する。
【0021】
本発明の液滴塗布装置は、塗布用針の先端に付着している液滴が塗布面と接触していない場合とその液滴が塗布面と接触している場合とにおいて、それぞれ塗布用針の振動特性が異なることに注目し、この塗布用針の振動特性の違いを利用してZステージ6の降下位置を制御する。
【0022】
本発明の液滴塗布装置では、塗布用針を特定の周波数および振幅で振動させておく。この塗布用針の振動特性は、塗布用針やその先端に付着している液滴の質量や液滴の粘性抵抗による影響を受けて変化する。このような塗布用針の振動特性変化に基づいて、塗布用針の先端の液滴と塗布面との接触を検出することにより、塗布用針の位置を制御することができる。
【0023】
図1では、塗布用針が板ばね13、圧電素子12を介してZステージ6に取り付けられている例を示したが、塗布用針は、任意の手段を使用して特定の周波数および振幅で振動させておくことができる。
【0024】
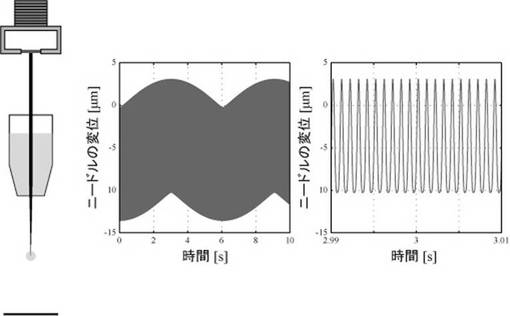
図5〜図7は、塗布用針の振動特性変化のシミュレーション結果を示している。シミュレーションは、以下のパラメータを使用して行った:
タングステン棒(塗布用針):直径0.5 mm、長さ5 cm、質量378 mg
保持用ジグ:2 mm角、質量9.52 mg
半球液滴(水):直径0.5 mm、質量0.033 mg
板ばね(歪ゲージ)の初期たわみ(液滴無し):0.25 μm
板ばね(歪ゲージ)のばね定数:7.84×103 N/m
塗布用針の長手方向振動の共振周波数(液滴無し):1 kHz
塗布用針の長手方向振動の共振周波数(液滴有り):999.9176 kHz。
【0025】
図5は、塗布用針11の先端に付着した塗布液15の液滴と塗布面が非接触の場合における塗布用針の振動変位を示している。この振動変位は、圧電素子12を周波数2 kHzおよび振幅5 μmで振動させたときに、歪ゲージ14によって検出される振動変位のシミュレーション結果であり、振動変位のエンベロープが波打つことが分かる。
【0026】
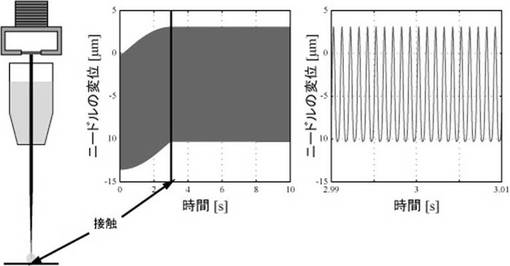
一方、図6は、上記と同様のパラメータにおいて、塗布用針11の先端に付着した塗布液15の液滴と塗布基板5の塗布面とが接触している場合に検出される塗布用針の振動変位のシミュレーション結果を示している。
【0027】
図5に示したような塗布用針の先端の液滴と塗布面とが非接触の場合とは異なり、図6に示したような塗布用針の先端の液滴と塗布面とが接触している場合では、振動変位のエンベロープが一定であることが分かる。
【0028】
また、図7は、塗布用針の先端の液滴と塗布面とが時間0〜3秒まで非接触であるが、時間3〜10秒において接触している場合の塗布用針11の振動変位のシミュレーション結果を示している。
【0029】
図5〜図7に示したように、塗布用針の先端に付着した液滴と塗布面とが非接触であるときと、接触しているときの塗布用針の振動変位のエンベロープの間には大きな差があり、この塗布用針の振動特性変化を利用して、塗布用針と塗布面との間隔を検出することができる。なお、エンベロープにこのような差の生じる原因は、接触時と非接触時とで塗布用針の共振周波数が変化するためであり、また、接触時の共振周波数と駆動周波数とが後述するようなある一定の関係を有するためである。
【0030】
上記の塗布用針の振動は、ラプラス変換を用いて解析することができる。たとえば、図5に示したように、タングステン棒などの塗布用針が板ばね(歪ゲージ)介して圧電素子に取り付けられている場合、圧電素子の変位x、板ばねのばね定数k、タングステン棒の変位yおよびタングステン棒とその先端に付着している液滴の質量をmとすると、以下の式のように運動方程式をラプラス変換することで、塗布用針の振動変位を求めることができる。
【0031】
【数1】

ラプラス変換の結果は、
【数2】
と表される。
【0032】
また、シミュレーションにおける、圧電素子の変位は、
【0033】
【数3】
と表される。
【0034】
すると、タングステン棒の変位は、
【0035】
【数4】
と表される。
【0036】
塗布用針の振動特性におけるエンベロープの変化の要因は、タングステン棒の変位が以下の式のように表されることに由来する。
【0037】
【数5】
【0038】
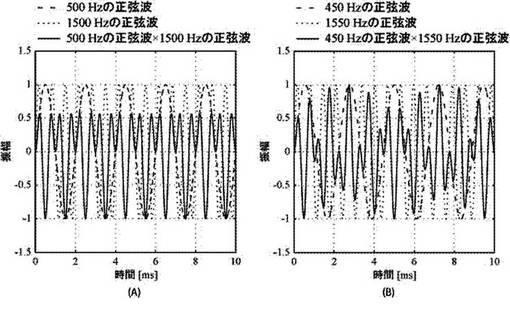
次に液滴が付着していない状態での塗布用針の共振周波数を1kHz、駆動周波数を1.9および2 kHzとして上記数5の式の下段を用いてシミュレーションを行った。2 kHzの場合は、駆動周波数は塗布用針の共振周波数の整数倍(2倍)となっており、1.9 kHzの場合には駆動周波数と共振周波数との間には整数倍の関係が成立しない。
【0039】
図11は上記シミュレーションの結果を示すもので、図11(A)の振動変位は、駆動周波数が2kHzであるため、数5より500Hzの正弦波と1500Hzの正弦波の積となる。また図11(B)の振動変位は、駆動周波数が1.9kHzであるため、数5より450Hzの正弦波と1550Hzの正弦波の積となる。先の図5〜7の場合と同様に、駆動周波数が共振周波数の整数倍(2倍)のときは振動変位のエンベロープは一定値を有する波形となる。一方、整数倍の関係が成立しない場合にはエンベロープが波打つ波形になることが明らかである。一般的には、駆動周波数が塗布用針の共振周波数の整数倍あるいは整数分の1倍に一致したときに、振動変位のエンベロープが一定値を有する波形となるため、この性質を利用すれば液滴と塗布面との接触、非接触の判定が可能となる。従って、駆動周波数は、液滴が付着していない状態での塗布用針の共振周波数の整数倍および整数分の1倍であることが好ましい。
【0040】
以下、本発明の液滴塗布装置の構成および処理手順の一例を説明する。
【0041】
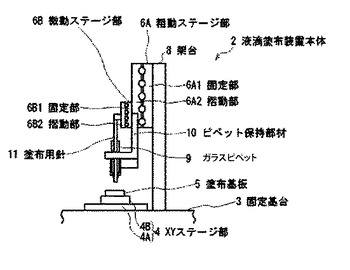
液滴塗布装置本体2は、図2および3に示すように、固定基台3上に配設されたXYステージ4を有する。固定基台3上には、塗布基板5が載置される。また、塗布面に上方から対向するように、Zステージ6が設けられている。液滴塗布装置本体2は、塗布対象に液滴を順次塗布することができる。
【0042】
この実施の形態の場合、XYステージ4は、固定基台3の所定位置に位置決めされたXステージ部4Aを有する。このXステージ部4Aが、上面に装着されたYステージ部4BをX軸方向に移動させる。一方、Yステージ部4Bが上面に載置された塗布基板5をY軸方向に移動させる。これにより、Zステージ6に対する塗布基板5のXY平面上の位置を順次位置決めできるようになされている。
【0043】
Zステージ6には、固定基台3上に上方に延長するように設けられた架台8に粗動ステージ部6Aを取り付けられている。当該粗動ステージ6Aの架台8に固着された固定部6A1には、Z軸方向に摺動する摺動部6A2に対して微動ステージ部6Bの固定部6B1が固着されている。これにより粗動ステージ部6Aは、微動ステージ部6BをZ軸方向に粗いピッチで降下または上昇させることができる。
【0044】
粗動ステージ部6Aの摺動部6A2には、下方に突出するように、塗布液収納部を構成するガラスピペット9を保持するピペット保持部材10が取り付けられている。これにより、ガラスピペット9が微動ステージ部6Bの固定部6B1と共に、Z軸方向に粗いピッチでZ軸方向に降下または上昇するようになされている。
【0045】
微動ステージ部6Bの摺動部6B2には、液滴塗布部材としての塗布用針11がZ軸方向に沿うように取り付けられている。これにより、微動ステージ6Bの摺動部6B2が固定部6B1に対して摺動動作したとき、塗布用針11がZ軸方向に沿ってガラスピペット9内を通って所定の速度で降下または上昇する。
【0046】
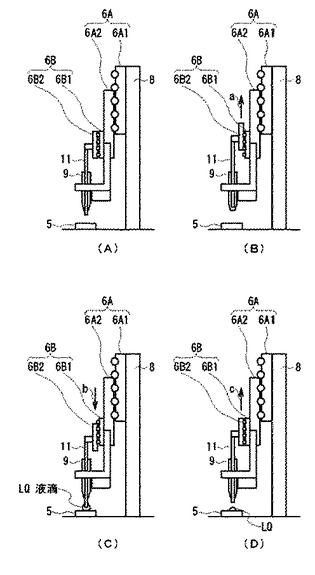
図3(A)に示すように、微動ステージ6Bの摺動部6B2が摺動動作をしていない基準位置にある状態では、粗動ステージ部6Aの摺動部6A2が液滴塗布動作位置にまで降下したとき、塗布用針11の先端部がガラスピペット9の先端より下方に突出した状態になる。
【0047】
この状態において、微動ステージ6Bの摺動部6B2が、図3(B)において矢印aで示すように上方に摺動動作することによって塗布用針11の先端がガラスピペット9の内部に引き込まれた状態になる。
【0048】
この状態において、微動ステージ6Bの摺動部6B2が、図3(B)において矢印bで示すように、基準位置(4(A))より下方に降下すると、塗布用針11の先端がガラスピペット9内に収納されている塗布液中を通って下方に突出する状態になる。
【0049】
このとき、塗布用針11の先端面およびその近傍の周面がガラスピペット9内から下方に突出する際に、ガラスピペット9内に収納されている塗布液を引き連れて下方に突出することによって塗布用針11の先端に液滴が生成され、これが塗布基板5の表面上に塗布される。
【0050】
塗布用針11の先端に付着させる液適量は、任意の量であることができ、たとえば0.1〜300plであることができる。また、塗布液の粘性は、任意の粘度であることができ、たとえば1〜350000cPであることができる。
【0051】
この状態において、微動ステージ6Bの摺動部6B2が、図3(D)において矢印cで示すように、上方に摺動動作して基準位置に戻ると液滴塗布装置本体2の液滴塗布動作の一巡動作が終了する。
【0052】
図3(A)〜(D)で示される液滴塗布装置本体2の液滴塗布動作は、ステージ制御部21から送出されるZステージ制御信号S1によってZステージ6の粗動ステージ部6Aおよび微動ステージ部6Bが駆動制御されることにより実行される。
【0053】
また図3(A)〜(D)の液滴塗布動作は、ステージ制御部21から送出されるXYステージ制御信号S2によってXYステージ4が制御されることにより、Xステージ4AおよびYステージ4Bが塗布基板5の塗布面の表面上の所望の位置に液滴を塗布することができるように、塗布用針11に対して塗布基板5の塗布面を順次位置決めする。
【0054】
図1において、ステージ制御部21は、パーソナルコンピュータなどのシステム制御ユニットによってユーザがデータ入力部24から入力する入力データと針振動解析部23から得られるZステージ停止信号S3とに基づいて制御される。
【0055】
塗布用針11の降下位置は、以下のように制御される。圧電素子駆動部22は、圧電素子12に対して単一周波数S4を与えるように圧電素子12を駆動させる。本発明の液滴塗布装置において、塗布用針11は、任意の方法で振動させることができ、塗布用針を圧電素子に取り付ける以外の手段を使用することもできる。また、本発明の液滴塗布装置において、塗布用針11は、共振周波数の0.5倍および2倍などの整数倍および整数分の1の周波数で振動させることができる。
【0056】
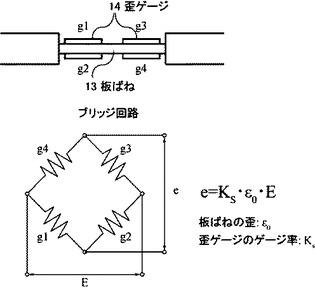
一方、塗布用針11の振動は、板ばね13に取り付けられた歪ゲージ14によって検出される。針振動は、歪ゲージにより電圧に変換され、板ばねの歪データS5として、針振動解析部23に送信される。
【0057】
本発明の液滴塗布装置において、塗布用針の振動は、針振動を電圧に変換することができる任意の手段によって検出することができる。たとえば、図8に示したように歪センサよる抵抗法センサだけでなく、差動トランス形式などの電磁誘導法センサおよび空気コンデンサの容量変化に基づく静電容量法センサによって検出することができる。
【0058】
歪ゲージの配置およびブリッジ回路の一例を図8および図9に示してある。図8は、板ばねに歪ゲージを取り付けた構成の一例を示してある。図9において、上段は、歪ゲージの配置の一例を示し、下段は、ブリッジ回路の一例を示す。
【0059】
針振動解析部23では、図10に示したように、包絡線検波によって検出された針振動のエンベロープの時間微分をとり、比較器においてその値を比較する。エンベロープの時間微分値が一定の絶対値以下となったときに、Zステージの下降を停止する信号S3をステージ制御部に送信する。図5〜7に示したように、針振動のエンベロープを時間微分した値は、塗布用針11の先端の液滴が塗布面に接触していないときは、一定値以上の絶対値を有するが、塗布面に接触したときは、その値は、塗布面に接触していないときよりも小さな値の範囲内になると考えられる。従って、一定値の範囲内になったときにZステージ停止信号S3をステージ制御部に送信する。理想的には、針振動のエンベロープを時間微分した値が0となったときに、Zステージ停止信号S3をステージ制御部に送信する。
【0060】
塗布用針11が降下するときに、ステージ制御部21からは、Zステージ制御信号S1として、塗布用針11を降下させる指令が与えられる。その結果、塗布用針11が降下していく。塗布用針11の先端の液滴の塗布液15が接触すると、針振動解析部23は、Zステージ停止信号S3をステージ制御部21に送信する。次いで、ステージ制御部21からは、Zステージ制御信号S1として、塗布用針11の降下を停止させる指令が与えられると共に、塗布用針11を上昇させる指令が与えられる。
【0061】
マイクロアレイなどのように、複数の液滴を塗布面に塗布する場合は、上記の工程を所定の回数繰り返すことにより液滴が塗布される。たとえば、以下のような手順で液滴塗布処理することができる。
【0062】
ユーザは、データ入力部24から初期設定条件および所望のXY座標に液滴を塗布する処理指令を入力する。次いで、液滴塗布処理手順に入ると、データ入力部24から入力される入力データに基づいて、ステージ制御部21に対して位置決め情報を与える。このとき、入力データは、所定のメモリに保存されていてもよい。続いて、初期設定条件に入力された条件に基づくXYステージ制御信号S2をXYステージ4に与える。これにより、塗布用針11に対して塗布基板5の塗布面を位置決めする。
【0063】
続いて、ステージ制御部21は、塗布用針11を初期設定された速度で降下させる(微動ステージ部6Bによる)と共に、針振動解析部23により、塗布する液滴と塗布面の接触の検出動作を行う。ステージ制御部21は、針振動解析部23からZステージ停止信号S3として塗布用針11の降下を停止させる指令が与えられるまで、塗布用針11を降下させる。続いて、ステージ制御部21は、塗布用針11を上昇させる。
【0064】
続いて、ステージ制御部21は、次の液滴を塗布するXY座標に移動するためのXYステージ制御信号S2をXYステージ4に与えて、塗布用針11に対して塗布基板5を位置決めする。
【0065】
上記処理を全ての液滴が塗布されるまで繰り返して、所望の位置に液滴を塗布することができる。
【符号の説明】
【0066】
1……液滴塗布装置、2……液滴塗布装置本体、3……固定基台、4……XYステージ、4A……Xステージ部、4B……Yステージ部、5……塗布基板、6……Zステージ、6A……粗動ステージ部、6A1……固定部、6A2……摺動部、6B……微動ステージ部、6B1……固定部、6B2……摺動部、8……架台、9……ガラスピペット、10……ピペット保持部材、11……塗布用針、12……圧電素子、13……板ばね、14……歪ゲージ、15……塗布液、……、21……ステージ制御部、22……圧電素子駆動部、23……針振動解析部、24……データ入力部、30……ブリッジ回路
【技術分野】
【0001】
本発明は、液状物を吐出するための液状物吐出装置の塗布機構に関する。特に、本発明は、微少液滴塗布機構において、ばねを介して塗布用針に加えた振動の変化を利用して塗布用針の位置制御を行う機構に関する。
【背景技術】
【0002】
近年、微少量の液滴の生成・分注技術は、μTAS分野における化学分析やバイオ産業における薬品生成の過程において重要な役割を担っている。微少量の液滴を吐出できる装置として、高粘度の液体をpl(ピコリットル)オーダーで塗布することができるニードル式微少液滴塗布機構が提案されている。このニードル式微少液滴塗布機構は、中空の極細ガラス管と極細針(以下では塗布用針とする)から構成され、試料液体の入ったガラス管の中を通過した塗布用針を塗布面に接触させることで、微少量の液滴を塗布することができる。
【0003】
ところがこの種の従来の液滴塗布装置は、塗布用針の先端を塗布対象の塗布面に押し当てるため、押し当てた状態において試料液体が多量に塗布面へ流れ込んだり、当接した塗布用針の先端付近が曲がったり、塗布対象の塗布面を損傷させたりするといった問題があった。これらの問題を解決するために、塗布用針に取り付けた歪ゲージセンサの出力を利用して、塗布用針の歪み、撓み、および捻れ現象を検知し、塗布用針や塗布面の破損を防ぐ手段が提唱されている(特許文献1)。しかし、ニードル式微少液滴塗布機構では、通常、塗布用針の先端が非常に細いため、塗布用針と塗布面が接触した際に生じる塗布面や塗布用針の損傷が問題となるため、塗布用針は、非接触であることが理想的である。
【0004】
非接触で塗布用針を制御する手段として、顕微鏡画像や光電センサを使用して、塗布用針を塗布対象に当接させることなく微少な液滴を塗布面に的確に塗布できるようにした液滴塗布装置が提案されている(たとえば、特許文献2)。しかし、このような顕微鏡画像や光電センサを使用した塗布用針の位置決め手段では、装置の規模およびコストが大幅に増加してしまった。また、光電センサを使用する場合では、ビームの反射位置を塗布用針の真下に正確に調整する必要がある。しかし、ビームの反射位置調整には数十μmオーダーの微調整が必要であるため、この反射位置調整は非常に困難な作業であった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特願2008-208312号
【特許文献2】特開2008-191091公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、塗布用針を塗布対象に当接させることなく、微少な液滴を塗布対象の塗布面に的確に塗布できる液滴塗布装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明者は、塗布用針を塗布対象に当接させることなく微少な液滴を塗布面に的確に塗布できるようにするために、塗布用針の振動特性変化を利用することに想到し、本発明に至った。本特許は、圧電素子などを使用して、板ばねを介して塗布用針に微少振動を与え、その振動特性の変化から針の先端に付着した微少液滴と塗布面との接触を検出することに基づいた液滴塗布装置および液滴塗布方法を提供する。
【0008】
本発明は、塗布液を収納する塗布液収納部を通って塗布用針を降下させることにより塗布対象の塗布面に液滴を塗布する液滴塗布装置であって、
塗布用針を振動させるための針振動手段と、
塗布用針の振動を検出するための針振動検出手段と、
針振動検出手段の検出出力において、塗布用針の先端に付着した液滴が塗布対象の塗布面に接触していないときの針振動の共振周波数と前記液滴が前記塗布面に接触しているときの共振周波数が異なる性質を利用して、塗布用針の降下動作を制御する針位置制御手段を備えることを特徴とする、液滴塗布装置を提供する。
【0009】
また、本発明は、針振動検出手段が、塗布用針の振動変位のエンベロープを時間微分した値の絶対値が一定値以下となったことを検知したときに、塗布用針の降下動作を停止させることを特徴とする、上記液滴塗布装置を提供する。
【0010】
また、本発明は、塗布用針を振動させるための針振動手段の駆動周波数が、塗布用針の先端に液滴が付着していない状態での針振動の共振周波数の整数倍または整数分の1倍になることを特徴とする、液滴塗布装置を提供する。
【0011】
また、本発明は、針振動手段が圧電素子であることを特徴とする、液滴塗布装置を提供する。
【0012】
また、本発明は、針振動検出手段が抵抗法センサ、電磁誘導法センサまたは静電容量法センサであることを特徴とする、液滴塗布装置を提供する。
【0013】
さらに、本発明は、塗布液を収納する塗布液収納部を通って塗布用針を降下させることにより塗布対象の塗布面に液滴を塗布する液滴塗布方法であって、
塗布用針を振動させるための針振動工程と、
塗布用針の振動を検出するための針振動検出工程と、
針振動検出手段の検出出力によって前記塗布用針の降下動作を制御する針位置制御工程を備えることを特徴とする、液滴塗布方法を提供する。
【発明の効果】
【0014】
本発明によれば、塗布用針の先端に付着した液滴が塗布面に接触したことを検出して、塗布用針の降下を停止させることができる。これにより、塗布用針を塗布対象に当接させずに、的確に塗布液の液滴を塗布面に塗布することができる液滴塗布装置および液滴塗布方法を実現することができる。
【図面の簡単な説明】
【0015】
【図1】本発明に従った液滴塗布装置の一実施態様の略先的ブロック図。
【図2】本発明に従った液滴塗布装置本体の一実施態様を示す図。
【図3】本発明に従った液滴塗布装置本体の液滴塗布動作を示す図。
【図4】本発明に従った液滴塗布装置の塗布用針の動作を示す図。
【図5】塗布用針の先端に付着した液滴と塗布面が非接触の場合の塗布用針の変位を示す図。
【図6】塗布用針の先端に付着した液滴と塗布面が接触している場合の塗布用針の変位を示す図。
【図7】塗布用針の先端に付着した液滴と塗布面が時間0〜3秒まで非接触であるが、時間3〜10秒において接触している場合の塗布用針の振動の変位を示す図。
【図8】本発明に従った液滴塗布装置の針振動検出手段としての歪ゲージの一態様を示す図。
【図9】本発明に従った液滴塗布装置の針振動検出手段としての歪ゲージおよびブリッジ回路の一態様を示す図。
【図10】針振動解析部の構成の一態様を示す図。
【図11】駆動周波数が塗布用針の共振周波数の整数倍である場合と整数倍ではない場合の塗布用針の振動特性の違いを示す図。
【発明を実施するための形態】
【0016】
以下、本発明の液滴塗布装置を、図面を参照して詳述する。図1は、本発明に従った液滴塗布装置の一実施態様のブロック図である。液滴塗布装置1は、液滴塗布装置本体2を有する。
【0017】
液滴塗布装置本体2は、図1に示すように、XYステージ4およびZステージ6を有する。Zステージ6は、XYステージ4上の塗布基板5の表面(以下では単に塗布面とする)に上方から対向するように設けられている。
【0018】
また、Zステージ6には、針振動手段としての圧電素子12が取り付けられ、さらに板ばね13に取り付けられた針振動検出手段としての歪ゲージ14を備えている。XYステージ4上には、塗布液15が塗布される塗布基板5が載置される。また、Zステージ6には、圧電素子12、板ばね13を介して塗布用針11が取り付けられている。また、塗布用針11は、塗布液15の液滴が塗布される塗布基板5の塗布面に対して上方から対向するように設けられている。
【0019】
塗布用針11は、図4に示したように作動する。最初、塗布用針11の先端は、塗布液収納部(ガラスピペット9)の塗布液15中にある。次いで、塗布用針11がガラスピペット9から下方に移動する。このとき、塗布用針11の先端には、塗布液15の一部が液滴として付着する。塗布用針11がさらに下方に移動して、塗布用針11の先端に付着している塗布液15の液滴が、塗布基板5の塗布面に接触する。その後、塗布用針11は、上昇して、塗布液収納部の塗布液15中に収納される。
【0020】
本発明の液滴塗布装置は、上記のように塗布液を塗布する際に、塗布用針の振動特性変化を利用して塗布用針の位置を制御する。以下に、塗布用針の振動特性変化を利用して塗布用針の位置を制御する方法を説明する。
【0021】
本発明の液滴塗布装置は、塗布用針の先端に付着している液滴が塗布面と接触していない場合とその液滴が塗布面と接触している場合とにおいて、それぞれ塗布用針の振動特性が異なることに注目し、この塗布用針の振動特性の違いを利用してZステージ6の降下位置を制御する。
【0022】
本発明の液滴塗布装置では、塗布用針を特定の周波数および振幅で振動させておく。この塗布用針の振動特性は、塗布用針やその先端に付着している液滴の質量や液滴の粘性抵抗による影響を受けて変化する。このような塗布用針の振動特性変化に基づいて、塗布用針の先端の液滴と塗布面との接触を検出することにより、塗布用針の位置を制御することができる。
【0023】
図1では、塗布用針が板ばね13、圧電素子12を介してZステージ6に取り付けられている例を示したが、塗布用針は、任意の手段を使用して特定の周波数および振幅で振動させておくことができる。
【0024】
図5〜図7は、塗布用針の振動特性変化のシミュレーション結果を示している。シミュレーションは、以下のパラメータを使用して行った:
タングステン棒(塗布用針):直径0.5 mm、長さ5 cm、質量378 mg
保持用ジグ:2 mm角、質量9.52 mg
半球液滴(水):直径0.5 mm、質量0.033 mg
板ばね(歪ゲージ)の初期たわみ(液滴無し):0.25 μm
板ばね(歪ゲージ)のばね定数:7.84×103 N/m
塗布用針の長手方向振動の共振周波数(液滴無し):1 kHz
塗布用針の長手方向振動の共振周波数(液滴有り):999.9176 kHz。
【0025】
図5は、塗布用針11の先端に付着した塗布液15の液滴と塗布面が非接触の場合における塗布用針の振動変位を示している。この振動変位は、圧電素子12を周波数2 kHzおよび振幅5 μmで振動させたときに、歪ゲージ14によって検出される振動変位のシミュレーション結果であり、振動変位のエンベロープが波打つことが分かる。
【0026】
一方、図6は、上記と同様のパラメータにおいて、塗布用針11の先端に付着した塗布液15の液滴と塗布基板5の塗布面とが接触している場合に検出される塗布用針の振動変位のシミュレーション結果を示している。
【0027】
図5に示したような塗布用針の先端の液滴と塗布面とが非接触の場合とは異なり、図6に示したような塗布用針の先端の液滴と塗布面とが接触している場合では、振動変位のエンベロープが一定であることが分かる。
【0028】
また、図7は、塗布用針の先端の液滴と塗布面とが時間0〜3秒まで非接触であるが、時間3〜10秒において接触している場合の塗布用針11の振動変位のシミュレーション結果を示している。
【0029】
図5〜図7に示したように、塗布用針の先端に付着した液滴と塗布面とが非接触であるときと、接触しているときの塗布用針の振動変位のエンベロープの間には大きな差があり、この塗布用針の振動特性変化を利用して、塗布用針と塗布面との間隔を検出することができる。なお、エンベロープにこのような差の生じる原因は、接触時と非接触時とで塗布用針の共振周波数が変化するためであり、また、接触時の共振周波数と駆動周波数とが後述するようなある一定の関係を有するためである。
【0030】
上記の塗布用針の振動は、ラプラス変換を用いて解析することができる。たとえば、図5に示したように、タングステン棒などの塗布用針が板ばね(歪ゲージ)介して圧電素子に取り付けられている場合、圧電素子の変位x、板ばねのばね定数k、タングステン棒の変位yおよびタングステン棒とその先端に付着している液滴の質量をmとすると、以下の式のように運動方程式をラプラス変換することで、塗布用針の振動変位を求めることができる。
【0031】
【数1】
ラプラス変換の結果は、
【数2】
と表される。
【0032】
また、シミュレーションにおける、圧電素子の変位は、
【0033】
【数3】
と表される。
【0034】
すると、タングステン棒の変位は、
【0035】
【数4】
と表される。
【0036】
塗布用針の振動特性におけるエンベロープの変化の要因は、タングステン棒の変位が以下の式のように表されることに由来する。
【0037】
【数5】
【0038】
次に液滴が付着していない状態での塗布用針の共振周波数を1kHz、駆動周波数を1.9および2 kHzとして上記数5の式の下段を用いてシミュレーションを行った。2 kHzの場合は、駆動周波数は塗布用針の共振周波数の整数倍(2倍)となっており、1.9 kHzの場合には駆動周波数と共振周波数との間には整数倍の関係が成立しない。
【0039】
図11は上記シミュレーションの結果を示すもので、図11(A)の振動変位は、駆動周波数が2kHzであるため、数5より500Hzの正弦波と1500Hzの正弦波の積となる。また図11(B)の振動変位は、駆動周波数が1.9kHzであるため、数5より450Hzの正弦波と1550Hzの正弦波の積となる。先の図5〜7の場合と同様に、駆動周波数が共振周波数の整数倍(2倍)のときは振動変位のエンベロープは一定値を有する波形となる。一方、整数倍の関係が成立しない場合にはエンベロープが波打つ波形になることが明らかである。一般的には、駆動周波数が塗布用針の共振周波数の整数倍あるいは整数分の1倍に一致したときに、振動変位のエンベロープが一定値を有する波形となるため、この性質を利用すれば液滴と塗布面との接触、非接触の判定が可能となる。従って、駆動周波数は、液滴が付着していない状態での塗布用針の共振周波数の整数倍および整数分の1倍であることが好ましい。
【0040】
以下、本発明の液滴塗布装置の構成および処理手順の一例を説明する。
【0041】
液滴塗布装置本体2は、図2および3に示すように、固定基台3上に配設されたXYステージ4を有する。固定基台3上には、塗布基板5が載置される。また、塗布面に上方から対向するように、Zステージ6が設けられている。液滴塗布装置本体2は、塗布対象に液滴を順次塗布することができる。
【0042】
この実施の形態の場合、XYステージ4は、固定基台3の所定位置に位置決めされたXステージ部4Aを有する。このXステージ部4Aが、上面に装着されたYステージ部4BをX軸方向に移動させる。一方、Yステージ部4Bが上面に載置された塗布基板5をY軸方向に移動させる。これにより、Zステージ6に対する塗布基板5のXY平面上の位置を順次位置決めできるようになされている。
【0043】
Zステージ6には、固定基台3上に上方に延長するように設けられた架台8に粗動ステージ部6Aを取り付けられている。当該粗動ステージ6Aの架台8に固着された固定部6A1には、Z軸方向に摺動する摺動部6A2に対して微動ステージ部6Bの固定部6B1が固着されている。これにより粗動ステージ部6Aは、微動ステージ部6BをZ軸方向に粗いピッチで降下または上昇させることができる。
【0044】
粗動ステージ部6Aの摺動部6A2には、下方に突出するように、塗布液収納部を構成するガラスピペット9を保持するピペット保持部材10が取り付けられている。これにより、ガラスピペット9が微動ステージ部6Bの固定部6B1と共に、Z軸方向に粗いピッチでZ軸方向に降下または上昇するようになされている。
【0045】
微動ステージ部6Bの摺動部6B2には、液滴塗布部材としての塗布用針11がZ軸方向に沿うように取り付けられている。これにより、微動ステージ6Bの摺動部6B2が固定部6B1に対して摺動動作したとき、塗布用針11がZ軸方向に沿ってガラスピペット9内を通って所定の速度で降下または上昇する。
【0046】
図3(A)に示すように、微動ステージ6Bの摺動部6B2が摺動動作をしていない基準位置にある状態では、粗動ステージ部6Aの摺動部6A2が液滴塗布動作位置にまで降下したとき、塗布用針11の先端部がガラスピペット9の先端より下方に突出した状態になる。
【0047】
この状態において、微動ステージ6Bの摺動部6B2が、図3(B)において矢印aで示すように上方に摺動動作することによって塗布用針11の先端がガラスピペット9の内部に引き込まれた状態になる。
【0048】
この状態において、微動ステージ6Bの摺動部6B2が、図3(B)において矢印bで示すように、基準位置(4(A))より下方に降下すると、塗布用針11の先端がガラスピペット9内に収納されている塗布液中を通って下方に突出する状態になる。
【0049】
このとき、塗布用針11の先端面およびその近傍の周面がガラスピペット9内から下方に突出する際に、ガラスピペット9内に収納されている塗布液を引き連れて下方に突出することによって塗布用針11の先端に液滴が生成され、これが塗布基板5の表面上に塗布される。
【0050】
塗布用針11の先端に付着させる液適量は、任意の量であることができ、たとえば0.1〜300plであることができる。また、塗布液の粘性は、任意の粘度であることができ、たとえば1〜350000cPであることができる。
【0051】
この状態において、微動ステージ6Bの摺動部6B2が、図3(D)において矢印cで示すように、上方に摺動動作して基準位置に戻ると液滴塗布装置本体2の液滴塗布動作の一巡動作が終了する。
【0052】
図3(A)〜(D)で示される液滴塗布装置本体2の液滴塗布動作は、ステージ制御部21から送出されるZステージ制御信号S1によってZステージ6の粗動ステージ部6Aおよび微動ステージ部6Bが駆動制御されることにより実行される。
【0053】
また図3(A)〜(D)の液滴塗布動作は、ステージ制御部21から送出されるXYステージ制御信号S2によってXYステージ4が制御されることにより、Xステージ4AおよびYステージ4Bが塗布基板5の塗布面の表面上の所望の位置に液滴を塗布することができるように、塗布用針11に対して塗布基板5の塗布面を順次位置決めする。
【0054】
図1において、ステージ制御部21は、パーソナルコンピュータなどのシステム制御ユニットによってユーザがデータ入力部24から入力する入力データと針振動解析部23から得られるZステージ停止信号S3とに基づいて制御される。
【0055】
塗布用針11の降下位置は、以下のように制御される。圧電素子駆動部22は、圧電素子12に対して単一周波数S4を与えるように圧電素子12を駆動させる。本発明の液滴塗布装置において、塗布用針11は、任意の方法で振動させることができ、塗布用針を圧電素子に取り付ける以外の手段を使用することもできる。また、本発明の液滴塗布装置において、塗布用針11は、共振周波数の0.5倍および2倍などの整数倍および整数分の1の周波数で振動させることができる。
【0056】
一方、塗布用針11の振動は、板ばね13に取り付けられた歪ゲージ14によって検出される。針振動は、歪ゲージにより電圧に変換され、板ばねの歪データS5として、針振動解析部23に送信される。
【0057】
本発明の液滴塗布装置において、塗布用針の振動は、針振動を電圧に変換することができる任意の手段によって検出することができる。たとえば、図8に示したように歪センサよる抵抗法センサだけでなく、差動トランス形式などの電磁誘導法センサおよび空気コンデンサの容量変化に基づく静電容量法センサによって検出することができる。
【0058】
歪ゲージの配置およびブリッジ回路の一例を図8および図9に示してある。図8は、板ばねに歪ゲージを取り付けた構成の一例を示してある。図9において、上段は、歪ゲージの配置の一例を示し、下段は、ブリッジ回路の一例を示す。
【0059】
針振動解析部23では、図10に示したように、包絡線検波によって検出された針振動のエンベロープの時間微分をとり、比較器においてその値を比較する。エンベロープの時間微分値が一定の絶対値以下となったときに、Zステージの下降を停止する信号S3をステージ制御部に送信する。図5〜7に示したように、針振動のエンベロープを時間微分した値は、塗布用針11の先端の液滴が塗布面に接触していないときは、一定値以上の絶対値を有するが、塗布面に接触したときは、その値は、塗布面に接触していないときよりも小さな値の範囲内になると考えられる。従って、一定値の範囲内になったときにZステージ停止信号S3をステージ制御部に送信する。理想的には、針振動のエンベロープを時間微分した値が0となったときに、Zステージ停止信号S3をステージ制御部に送信する。
【0060】
塗布用針11が降下するときに、ステージ制御部21からは、Zステージ制御信号S1として、塗布用針11を降下させる指令が与えられる。その結果、塗布用針11が降下していく。塗布用針11の先端の液滴の塗布液15が接触すると、針振動解析部23は、Zステージ停止信号S3をステージ制御部21に送信する。次いで、ステージ制御部21からは、Zステージ制御信号S1として、塗布用針11の降下を停止させる指令が与えられると共に、塗布用針11を上昇させる指令が与えられる。
【0061】
マイクロアレイなどのように、複数の液滴を塗布面に塗布する場合は、上記の工程を所定の回数繰り返すことにより液滴が塗布される。たとえば、以下のような手順で液滴塗布処理することができる。
【0062】
ユーザは、データ入力部24から初期設定条件および所望のXY座標に液滴を塗布する処理指令を入力する。次いで、液滴塗布処理手順に入ると、データ入力部24から入力される入力データに基づいて、ステージ制御部21に対して位置決め情報を与える。このとき、入力データは、所定のメモリに保存されていてもよい。続いて、初期設定条件に入力された条件に基づくXYステージ制御信号S2をXYステージ4に与える。これにより、塗布用針11に対して塗布基板5の塗布面を位置決めする。
【0063】
続いて、ステージ制御部21は、塗布用針11を初期設定された速度で降下させる(微動ステージ部6Bによる)と共に、針振動解析部23により、塗布する液滴と塗布面の接触の検出動作を行う。ステージ制御部21は、針振動解析部23からZステージ停止信号S3として塗布用針11の降下を停止させる指令が与えられるまで、塗布用針11を降下させる。続いて、ステージ制御部21は、塗布用針11を上昇させる。
【0064】
続いて、ステージ制御部21は、次の液滴を塗布するXY座標に移動するためのXYステージ制御信号S2をXYステージ4に与えて、塗布用針11に対して塗布基板5を位置決めする。
【0065】
上記処理を全ての液滴が塗布されるまで繰り返して、所望の位置に液滴を塗布することができる。
【符号の説明】
【0066】
1……液滴塗布装置、2……液滴塗布装置本体、3……固定基台、4……XYステージ、4A……Xステージ部、4B……Yステージ部、5……塗布基板、6……Zステージ、6A……粗動ステージ部、6A1……固定部、6A2……摺動部、6B……微動ステージ部、6B1……固定部、6B2……摺動部、8……架台、9……ガラスピペット、10……ピペット保持部材、11……塗布用針、12……圧電素子、13……板ばね、14……歪ゲージ、15……塗布液、……、21……ステージ制御部、22……圧電素子駆動部、23……針振動解析部、24……データ入力部、30……ブリッジ回路
【特許請求の範囲】
【請求項1】
塗布液を収納する塗布液収納部を通って塗布用針を降下させることにより塗布対象に液滴を塗布する液滴塗布装置であって、
前記塗布用針を振動させるための針振動手段と、
前記塗布用針の振動を検出するための針振動検出手段と、
前記針振動検出手段の検出出力において、前記液滴が前記塗布面に接触していないときの共振周波数と前記液滴が前記塗布面に接触したときの共振周波数とが異なる性質を利用して、前記塗布用針の降下動作を制御する針位置制御手段と
を備えることを特徴とする、液滴塗布装置。
【請求項2】
前記針位置制御手段は、前記塗布用針の振動変位のエンベロープを時間微分した値の絶対値が一定値以下となったときに、前記塗布用針の降下動作を停止させることを特徴とする、請求項1に記載の液滴塗布装置。
【請求項3】
前記針振動手段の駆動周波数は、前記液滴の付着しない状態における前記塗布用針の共振周波数の整数倍または整数分の1倍にすることを特徴とする、請求項1または2に記載の液滴塗布装置。
【請求項4】
前記針振動手段は、圧電素子または電磁駆動素子であることを特徴とする、請求項1〜3のいずれか1項に記載の液滴塗布装置。
【請求項5】
前記針振動検出手段は、抵抗法センサ、電磁誘導法センサまたは静電容量法センサであることを特徴とする、請求項1〜4のいずれか1項に記載の液滴塗布装置。
【請求項6】
塗布液を収納する塗布液収納部を通って塗布用針を降下させることにより塗布対象に液滴を塗布する液滴塗布方法であって、
前記塗布用針を振動させるための針振動工程と、
前記塗布用針の振動を検出するための針振動検出工程と、
前記針振動検出手段の検出出力によって前記塗布用針の降下動作を制御する針位置制御工程と
を備えることを特徴とする、液滴塗布方法。
【請求項1】
塗布液を収納する塗布液収納部を通って塗布用針を降下させることにより塗布対象に液滴を塗布する液滴塗布装置であって、
前記塗布用針を振動させるための針振動手段と、
前記塗布用針の振動を検出するための針振動検出手段と、
前記針振動検出手段の検出出力において、前記液滴が前記塗布面に接触していないときの共振周波数と前記液滴が前記塗布面に接触したときの共振周波数とが異なる性質を利用して、前記塗布用針の降下動作を制御する針位置制御手段と
を備えることを特徴とする、液滴塗布装置。
【請求項2】
前記針位置制御手段は、前記塗布用針の振動変位のエンベロープを時間微分した値の絶対値が一定値以下となったときに、前記塗布用針の降下動作を停止させることを特徴とする、請求項1に記載の液滴塗布装置。
【請求項3】
前記針振動手段の駆動周波数は、前記液滴の付着しない状態における前記塗布用針の共振周波数の整数倍または整数分の1倍にすることを特徴とする、請求項1または2に記載の液滴塗布装置。
【請求項4】
前記針振動手段は、圧電素子または電磁駆動素子であることを特徴とする、請求項1〜3のいずれか1項に記載の液滴塗布装置。
【請求項5】
前記針振動検出手段は、抵抗法センサ、電磁誘導法センサまたは静電容量法センサであることを特徴とする、請求項1〜4のいずれか1項に記載の液滴塗布装置。
【請求項6】
塗布液を収納する塗布液収納部を通って塗布用針を降下させることにより塗布対象に液滴を塗布する液滴塗布方法であって、
前記塗布用針を振動させるための針振動工程と、
前記塗布用針の振動を検出するための針振動検出工程と、
前記針振動検出手段の検出出力によって前記塗布用針の降下動作を制御する針位置制御工程と
を備えることを特徴とする、液滴塗布方法。
【図2】

【図3】
【図9】
【図1】
【図4】
【図5】
【図6】

【図7】
【図8】
【図10】
【図11】
【図3】
【図9】
【図1】
【図4】
【図5】
【図6】
【図7】
【図8】
【図10】
【図11】
【公開番号】特開2011−174907(P2011−174907A)
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願番号】特願2010−62665(P2010−62665)
【出願日】平成22年3月18日(2010.3.18)
【出願人】(505246066)株式会社アプライド・マイクロシステム (7)
【出願人】(504133110)国立大学法人電気通信大学 (383)
【Fターム(参考)】
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願日】平成22年3月18日(2010.3.18)
【出願人】(505246066)株式会社アプライド・マイクロシステム (7)
【出願人】(504133110)国立大学法人電気通信大学 (383)
【Fターム(参考)】
[ Back to top ]