
液面検知装置
【課題】使用条件に制限を受けることなく、試験管1内の液面を正確に検知する装置を提供する。
【解決手段】液状物質が収納された筒状容器1の一部に光202を照射する照射部2と、照射部2から照射された光202が筒状容器1を透過した透過光を検出する検出部601とを有する液面検知装置であって、照射部2を筒状容器1の軸心と平行方向に移動させるのに連動して、透過光を検出可能な位置に検出部601を移動させるように、照射部2と検出部601との相対位置を制御する制御部7を有する液面検知装置を提供する。
【解決手段】液状物質が収納された筒状容器1の一部に光202を照射する照射部2と、照射部2から照射された光202が筒状容器1を透過した透過光を検出する検出部601とを有する液面検知装置であって、照射部2を筒状容器1の軸心と平行方向に移動させるのに連動して、透過光を検出可能な位置に検出部601を移動させるように、照射部2と検出部601との相対位置を制御する制御部7を有する液面検知装置を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液面検知装置に係り、特に、生化学,免疫,遺伝子検査等の技術分野において、血液,尿等の生体などの液状物質をサンプルとして取り扱う液面検知装置に関するものである。
【背景技術】
【0002】
従来からある生化学分析,近年広く使われて来ている免疫分析、または、あらたに市場が拡がって遺伝子分析などの分野で使われる血液自動分析装置の使用現場では、患者より採血した後の血液を遠心分離にかける等の前処理を施す過程に加えて、さらに各該当分析装置まで搬送する過程を自動的に行う装置が使われている。こうした装置は、試験管に入れられた血液サンプルを検体と呼称されることに因んで、一般的に、検体前処理装置と呼ばれている。
【0003】
しかし、こうした検体前処理装置を使っていても、実際の分析作業の現場では、いまだに一部の作業は、手作業に依存しており、こうした作業が日々繰り返されている。
【0004】
そうした作業の1つとして、遠心分離後に試験管内にある血清量から可能な分析項目を割り出す作業がある。この作業において、仮に、元々ある血清量よりも多くの血清量を必要とする分析項目を計画してしまうと、この分析項目を実施する過程における最終段階では、試験管内に残った少ない量を吸い出して分注せざるを得なくなり、本来吸ってはいけない血清下の分離剤を吸ってしまい、分注エラーを起こすことがあった。
【0005】
従来技術による検体前処理装置では、分注エラーを起こしてしまったら、その復旧作業を行わなければならないため、その分だけ装置稼働率を落とす結果を招いていた。
【0006】
従来からも、こうした事態へ対応する技術としては、物理的に大きな赤外光面光源やラインセンサ等を設けたり、プローブを垂らして液面との静電容量を計測したりして試験管内の液面を検知する手法が提案されている。その一例を特許文献1に示す。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第03733086号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上述した手法のうち、特許文献1に記載の手法では、物理的に大きな赤外光面光源やラインセンサを設けなければならず、設置スペース的にもコスト的にも無駄が多く、使用条件に制限を受けるという問題があった。
【0009】
また、上述した手法のうち、静電容量による手法では、実際にプローブを試験管内へ差し入れるために栓をいったん開く必要があり、開いた試験管内に汚染物が入り込み、試料が汚染されてしまうという欠点があった。さらには、試験管内へプローブを差し入れた際に、プローブに試料等が付着し、その後に、新たに別の試験管内へプローブを差し入れると、プローブに付着した試料等の付着物により、当該別の試験管内の試料が汚染されたりしてしまうという欠点があった。これらの欠点である試料間での汚染を考慮すれば、使用条件に制限を受けるという問題があった。
【0010】
本発明は、このような点に鑑みてなされたものであり、使用条件に制限を受けることなく、筒状容器内の液面を正確に検知する装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明の一態様によれば、液状物質が収納された筒状容器の一部に光を照射する照射部と、該照射部から照射された光が前記筒状容器を透過した透過光を検出する検出部とを有する液面検知装置であって、前記照射部を前記筒状容器の軸心と平行方向に移動させるのに連動して、前記透過光を検出可能な位置に前記検出部を移動させるように、前記照射部と前記検知部との相対位置を制御する制御部を有する液面検知装置が提供される。
【発明の効果】
【0012】
本発明に係る液面検知装置によれば、使用条件に制限を受けることなく、試験管内の液面を正確に検知することができる。
【図面の簡単な説明】
【0013】
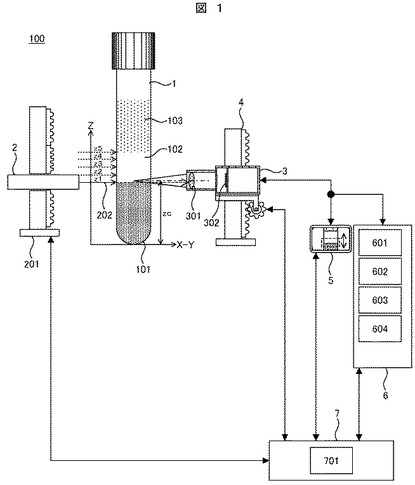
【図1】本発明の第一の実施形態の構成を示す図である。
【図2】本発明の第一の実施形態にかかる試験管の画像と、その画像処理結果であるZ方向位置z1のときのZ方向プロファイルとの関係を示した説明図である。
【図3】図2で示した、各Z方向位置z1〜z5夫々の液面検知領域を使った画像処理の途中結果を示した図である。
【図4A】図3におけるz1の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【図4B】図4Aに示される画像プロファイルに1次微分処理をかけた際に示される図である。
【図4C】図4Bに示される画像プロファイルに2次微分処理をかけた際に示される図である。
【図5A】図3におけるz2の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【図5B】図5Aに示される画像プロファイルに1次微分処理をかけた際に示される図である。
【図5C】図5Bに示される画像プロファイルに2次微分処理をかけた際に示される図である。
【図6A】図3におけるz3の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【図6B】図6Aに示される画像プロファイルに1次微分処理をかけた際に示される図である。
【図6C】図6Bに示される画像プロファイルに2次微分処理をかけた際に示される図である。
【図7A】図3におけるz4の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【図7B】図7Aに示される画像プロファイルに1次微分処理をかけた際に示される図である。
【図7C】図7Bに示される画像プロファイルに2次微分処理をかけた際に示される図である。
【図8A】図3におけるz5の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【図8B】図8Aに示される画像プロファイルに1次微分処理をかけた際に示される図である。
【図8C】図8Bに示される画像プロファイルに2次微分処理をかけた際に示される図である。
【図9】本発明の第一の実施形態にかかるフローを示した説明図である。
【図10】本発明の第二の実施形態の構成を示す図である。
【発明を実施するための形態】
【0014】
<本発明の第一の実施形態>
以下、本発明の一実施形態を図面に即して説明する。なお、この実施の形態は例示として挙げるものであり、これにより本発明を限定的に解釈するものではない。
【0015】
まず、本発明の一実施形態に係る液面検知装置について説明する。
【0016】
図1は、本発明の第一の実施形態に係る液面検知装置の構成図である。図1に示されているように、検体としての液状物質101〜103が、筒状容器としての試験管1に収納されている。
【0017】
液状物質101〜103としては、例えば、患者から採取した血液検体であり、血液検体は、遠心分離等の方法により、下層側の血餅101層と、上層側の血清103層とに分離されている。試験管1には、さらに、分離剤102が収納されており、血餅101と血清103とは、分離剤102層によって隔離されているよう構成されている。
【0018】
試験管1は、各種樹脂材料や各種ガラス材料などから構成された実質的に透明な上下方向に細長い有底筒状であって、円筒状あるいはテーパ状の容器である。
【0019】
図1に示されているように、ここでは、試験管1の軸心に対し平行方向をZ方向、試験管1の軸心に対し垂直方向をX方向,Y方向としている。
【0020】
なお、液状物質101〜103としては、血液や尿等の生体試料,当該生体試料と試薬とを混合した混合液、これらが反応した反応液等が挙げられる。
【0021】
試験管1は、図示しない試験管保持部に保持されている。試験管保持部は、図示しない試験管保持台に保持されている。
【0022】
なお、試験管1が、試験管保持部または/および試験管保持台に保持された状態でなくても、例えば、試験管1単独でも本発明の液面検知装置にて、液面を検知するようにしても良い。
【0023】
試験管1の側壁外側であって一方側には、光としてのレーザ202を試験管1へ照射する光照射手段としてのレーザ照射部2が設けられている。レーザ照射部2は、光源として、検体の液面を検知するために、試験管1の側壁に向けてレーザ202を照射するように構成されている。なお、レーザ照射部2は、特にレーザ発振装置として構成しても良い。
【0024】
レーザ照射部2は、レーザ照射部2を試験管1の軸心と平行方向へ移動させる駆動手段としての駆動部201により保持されている。
【0025】
駆動部201は、レーザ照射部2を昇降させるように構成されている。すなわち、図1に示されているように、駆動部201は、レーザ照射部2をZ方向に移動させるように構成されている。駆動部201は、ボールねじやギア,タイミングベルト等をモータ等により駆動されるように構成されている。駆動部201は、試験管1の軸心に対し平行方向に置かれたガイドに沿って移動するよう構成されている。
【0026】
試験管1の側壁外側であって他方側には、撮像部としてのカメラ3が設けられている。
カメラ3は、試験管1を挟んでレーザ照射部2と対向する位置に配置されるように構成されている。カメラ3は、検体の液面検知のために、レーザ照射部2から照射されたレーザ202が試験管1を透過した透過光としての光学像を少なくとも含む、試験管1側壁を撮像(以下、撮影ともいう。)する撮像手段として構成されている。
【0027】
カメラ3には、レーザ照射部2から照射されたレーザ202が試験管1を透過した光学像を少なくとも含む、試験管1側壁を一旦結像するための結像部、結像手段としてのレンズ301が設けられている。さらに、カメラ3には、レンズ301で結像した像を結ぶ位置に複数の結像検出器が格子状に並んで構成された撮像媒体302が設けられている。
【0028】
カメラ3は、カメラ3を試験管1の軸心と平行方向へ移動させる駆動手段としてのカメラ駆動部4により保持されている。
【0029】
カメラ駆動部4は、カメラ3を昇降させるように構成されている。すなわち、図1に示されているように、カメラ駆動部4は、カメラ3をZ方向に移動させるように構成されている。カメラ駆動部4は、ボールねじやギア,タイミングベルト等をモータ等により駆動されるように構成されている。カメラ駆動部4は、試験管1の軸心に対し平行方向に置かれたガイドに沿って移動するよう構成されている。
【0030】
カメラ駆動部4は、後述する制御部7による制御により、カメラ3をレーザ照射部2のZ方向への移動にともなって試験管1の撮像視野を必要に応じて移動させるためにカメラ3をZ方向へ移動させるように構成されている。
【0031】
カメラ3は、カメラ3が撮像する映像(画像ともいう。)を表示するための表示部としてのモニター5に電気的に接続されている。
【0032】
モニター5は、例えばCRT(Cathode-Ray Tube),液晶ディスプレイなどで構成されており、操作画面,データ入力画面,カメラ3が次々に映し出す映像や撮像した映像、若しくは、後述する画像処理装置6にて処理された画像をモニターする表示手段として構成されている。
【0033】
カメラ3は、カメラ3が次々に映し出す映像を画像処理にかけて液面検知結果を出力する画像処理手段としての画像処理装置6に電気的に接続されている。
【0034】
画像処理装置6は、カメラ3からの映像を画像処理して液面検知結果を出力するよう構成されている。
【0035】
具体的には、画像処理装置6は、カメラ3の撮像媒体302から得られる試験管1内の液体像から異なる液体同士の境界面または液体と気体との境界面を抽出可能なように構成される。
【0036】
画像処理装置6には、像切り出し手段としての像切り出し部601と、演算処理手段としての演算処理部602と、相対位置算出手段としての相対位置算出部603と、境界面算出手段としての境界面算出手段604と、が設けられている。
【0037】
検出部若しくは検出手段としての像切り出し部601は、カメラ3の撮像媒体302によって得られた像の一部を切り出すように構成されている。像切り出し部601は、液面を、画像処理しやすくするため、若しくは、より正確に検知しやすくするために画像処理上、必要とされる領域を特定し、切り出すように構成されている。
【0038】
具体的には、像切り出し部601は、撮像媒体302によって得られた像の一部として透過光の存在する領域を液面検知領域として切り出すように構成されている。
【0039】
演算処理部602は、画像を構成する各画素が取得する光量を試験管1の軸心に対し垂直方向に加算し、得られる輝度曲線に演算処理を施すように構成されている。
【0040】
具体的には、演算処理部602は、画像を構成する各画素が取得する光量を試験管1の軸心に対し垂直方向に加算し、得られる輝度曲線に一次微分演算処理および二次微分演算処理を施すように構成されている。好適には、演算処理部602は、画像として、像切り出し部601が切り出した液面検知領域を構成する各画素が取得する光量を試験管1の軸心に対し垂直方向に加算し、得られる輝度曲線に一次微分演算処理および二次微分演算処理を施すように構成されていると良い。
【0041】
相対位置算出部603は、演算処理部602が演算処理した結果等に基づき、Z方向のレーザ照射部2,カメラ3との相対位置を算出するように構成されている。なお、相対位置算出部603は、演算処理部602が演算処理した結果等に基づき、Z方向のレーザ照射部2,カメラ3との相対位置と、レーザ照射部2と像切り出し部601が切り出した液面検知領域との相対位置とを算出するように構成されていても良い。
【0042】
境界面算出部604は、演算処理部602が演算処理した際に、異なる液体同士の境界面または液体と気体との境界面を検出したときに、その画像中での境界面位置を求め、さらに、この境界面位置と相対位置算出部603が算出したカメラ3の移動量とに基づき、試験管1内での異なる液体同士の境界面または液体と気体との境界面のZ方向での位置を算出するように構成されている。なお、境界面算出部604は、演算処理部602が演算処理した際に、異なる液体同士の境界面または液体と気体との境界面を検出したときに、その画像中での境界面位置を求め、さらに、この境界面位置と相対位置算出部603が算出したカメラ3の移動量、レーザ照射部2と像切り出し部601が切り出した液面検知領域との相対位置とに基づき、試験管1内での異なる液体同士の境界面または液体と気体との境界面のZ方向での位置を算出するように構成されていても良い。
【0043】
画像処理装置6は、画像処理した液面検知結果を出力し表示させるようにモニター5に電気的に接続されている。
【0044】
駆動部201,カメラ駆動部4,モニター5,画像処理装置6は、少なくとも駆動部201,カメラ駆動部4,画像処理装置6を制御する制御部7に電気的に接続されている。
【0045】
制御部7は、レーザ照射部2を試験管1の軸心と平行方向に移動させるのに連動して、試験管1を透過した透過光を検出可能な位置に像切り出し部601若しくは/及びカメラ3を移動させるように、レーザ照射部2とカメラ3とのZ方向の相対位置を制御するように構成されている。
【0046】
制御部7には、記憶手段としての記憶部701が設けられている。
【0047】
記憶部701は、レーザ照射部2と像切り出し部601若しくは/及びカメラ3の相対的な位置関係が、各液層を構成する既知の液状物質の各境界面を挟んでの組合せに関連付けされて記憶される等の、レーザ照射部2とカメラ3とのZ方向の相対位置情報や、液面検知装置の各部に対応する各種アプリケーションプログラム、後述するフローチャートを実行するためのプログラム等の各種プログラムおよび各種データが予め記憶されているとともに、各プログラムで処理されたデータおよび制御部7に接続された各部からの入力データ等が記憶されるように構成されている。
【0048】
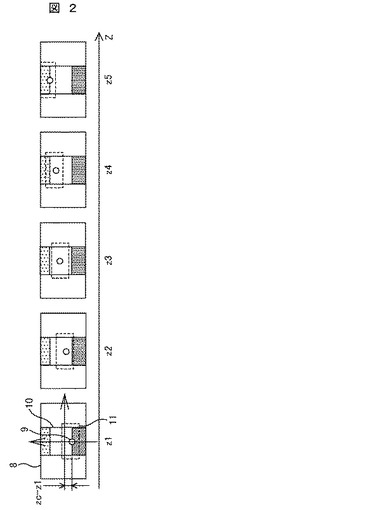
次に、本発明の第一の実施形態に係る液面検知装置において、画像処理装置6へ入力される試験管1の画像と、画像処理装置6による画像処理結果であるZ方向プロファイルとの関係を図2に示す。
【0049】
8は、画像処理装置6に入力される試験管1の側壁を写した画像を、9は画像8に写りこんでいるレーザ照射部2の照射スポットを、10は画像8に写りこんでいる試験管1の像を、11は画像8上にレーザ照射部2の移動に合わせて移動させる像切り出し部601が切り出す液面検知領域を示している。
【0050】
これらの画像8は、紙面横方向左から右に順番にレーザ照射部2のZ方向高さがz1,z2,z3・・・とz1〜z5まで順々に変わるに従って液面検知領域11の画像8上の位置をZ方向へzcの高さ位置からΔZ分ずつ移動させることを示している。なお、ここで言うzcとは、カメラ3におけるレンズ301の中心位置の高さ位置であるが、適宜、変更が可能であり、例えば、レンズ301の下端位置の高さ位置をzcとして定義しても良い。
【0051】
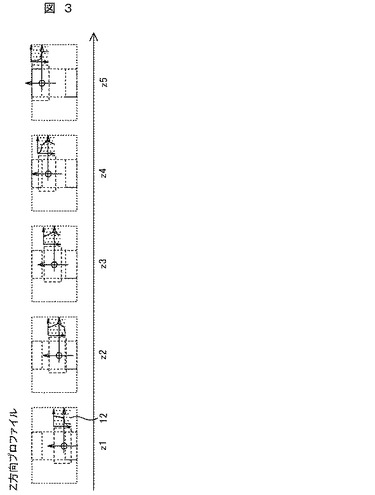
図3に、図2で示した、画像8の中の液面検知領域11を使った画像処理装置6による画像処理の途中結果12を液面検知に使用するためのZ方向プロファイルを各Z方向位置z1〜z5夫々に対して夫々、示している。なお、この途中結果12は、画像処置装置6の演算処理部602が、画像を構成する各画素が取得する光量を試験管1の軸心に対し垂直方向に加算し得られた輝度曲線として示されている。ここで、異なる液体同士の境界面または液体と気体との境界面に照射スポット9がかかる場合には、光の屈折具合等が液体同士、液体と気体とで異なることとなるため、輝度が急激に変化する箇所が、境界面だと判定することができることとなる。
【0052】
次に、図4〜図8に、図3で示したz1〜z5の高さ位置夫々における液面検知領域11から得られたZ方向プロファイルの途中結果12からの一連の画像処理装置6の演算処理部602における画像処理の流れを各Z方向位置に関連させて示している。
【0053】
図4Aは、図3におけるz1の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【0054】
Z方向z1では、画像処理装置6で得られるZ方向プロファイルの途中結果12は図4Aに示されるような形となる。なお、図4Aでは、縦軸を輝度(Fb(z))、横軸をZ方向の高さ位置で示している。
【0055】
このように、取得画像中に液面が存在すると同図に示すようなZ字形または逆Z字形のグラフをもつ画像プロファイルとなる。すなわち、この画像プロファイルが示すグラフの形態がZ字形または逆Z字形になることで、液面検知領域11内に液面が存在することを把握することができる。
【0056】
次に、図4Aに示される画像プロファイルに1次微分処理をかけると図4Bに示されるような、液面位置に凸型のピークを持つグラフをもつ画像プロファイルとなる。なお、図4Bでは、縦軸を、輝度を一次微分処理した際の値(Fb′)、横軸をZ方向の高さ位置で示している。
【0057】
次に、図4Bに示される画像プロファイルに2次微分処理をかけると図4Cに示されるような、丁度、液面位置で(Fb″)=0をクロスするグラフを得て、この0となる位置が元画像プロファイルでの変曲点として検知される。
【0058】
なお、図4Cでは、縦軸を、輝度を一次微分処理した際の値をさらに二次微分処理した際の値(Fb″)、横軸をZ方向の高さ位置で示している。
【0059】
この検知された変曲点が画像プロファイル上での液面位置となる。同図では、その液面位置をレーザ照射位置であるz1からのオフセットZ_offset1として示している。
最終的に、このz1+Z_offset1が、Z方向での液面位置として検知される。
【0060】
すなわち、一次微分処理した後、その二次微分処理することで、液面検知領域11内の液面位置を検知することができる。
【0061】
図5Aは、図3におけるz2の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【0062】
Z方向z2では、画像処理装置6で得られるZ方向プロファイルの途中結果12は図5Aに示されるような形となる。なお、図5Aでは、縦軸を輝度(Fb(z))、横軸をZ方向の高さ位置で示している。
【0063】
このように、取得画像中に液面が存在しないと同図に示すような上に凸形のグラフをもつ画像プロファイルとなる。すなわち、この画像プロファイルが示すグラフの形態が上に凸形になることで、液面検知領域11内に液面が存在しないことを把握することができる。
【0064】
次に、図5Aに示される画像プロファイルに1次微分処理をかけると図5Bに示されるような、凸型のピークが持たないグラフをもつ画像プロファイルとなる。なお、図5Bでは、縦軸を、輝度を一次微分処理した際の値(Fb′)、横軸をZ方向の高さ位置で示している。
【0065】
次に、図5Bに示される画像プロファイルに2次微分処理をかけると図5Cに示されるような、グラフが(Fb″)=0をクロスする変曲点を得ることができない。なお、図5Cでは、縦軸を、輝度を一次微分処理した際の値をさらに二次微分処理した際の値(Fb″)、横軸をZ方向の高さ位置で示している。
【0066】
すなわち、図5Aに示される画像プロファイルに1次微分および2次微分をかけてもグラフが(Fb″)=0をクロスする変曲点を得ることはできず、このような場合、取得画像中に液面が存在しないと検知することが可能となる。
【0067】
図6Aは、図3におけるz3の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【0068】
Z方向z3では、画像処理装置6で得られるZ方向プロファイルの途中結果12は図6Aに示されるような形となる。なお、図6Aでは、縦軸を輝度(Fb(z))、横軸をZ方向の高さ位置で示している。
【0069】
このように、取得画像中に液面が存在しないと同図に示すような上に凸形のグラフをもつ画像プロファイルとなる。すなわち、この画像プロファイルが示すグラフの形態が上に凸形になることで、液面検知領域11内に液面が存在しないことを把握することができる。
【0070】
次に、図6Aに示される画像プロファイルに1次微分処理をかけると図6Bに示されるような、凸型のピークが持たないグラフをもつ画像プロファイルとなる。なお、図6Bでは、縦軸を、輝度を一次微分処理した際の値(Fb′)、横軸をZ方向の高さ位置で示している。
【0071】
次に、図6Bに示される画像プロファイルに2次微分処理をかけると図6Cに示されるような、グラフが(Fb″)=0をクロスする変曲点を得ることができない。なお、図6Cでは、縦軸を、輝度を一次微分処理した際の値をさらに二次微分処理した際の値(Fb″)、横軸をZ方向の高さ位置で示している。
【0072】
すなわち、図6Aに示される画像プロファイルに1次微分および2次微分をかけてもグラフが0をクロスする変曲点を得ることはできず、このような場合、取得画像中に液面が存在しないと検知することが可能となる。
【0073】
図7Aは、図3におけるz4の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【0074】
Z方向z4では、画像処理装置6で得られるZ方向プロファイルの途中結果12は図7Aに示されるような形となる。なお、図7Aでは、縦軸を輝度(Fb(z))、横軸をZ方向の高さ位置で示している。
【0075】
このように、取得画像中に液面が存在しないと同図に示すような上に凸形のグラフをもつ画像プロファイルとなる。すなわち、この画像プロファイルが示すグラフの形態が上に凸形になることで、液面検知領域11内に液面が存在しないことを把握することができる。
【0076】
次に、図7Aに示される画像プロファイルに1次微分処理をかけると図7Bに示されるような、凸型のピークが持たないグラフをもつ画像プロファイルとなる。なお、図7Bでは、縦軸を、輝度を一次微分処理した際の値(Fb′)、横軸をZ方向の高さ位置で示している。
【0077】
次に、図7Bに示される画像プロファイルに2次微分処理をかけると図7Cに示されるような、グラフが(Fb″)=0をクロスする変曲点を得ることができない。なお、図7Cでは、縦軸を、輝度を一次微分処理した際の値をさらに二次微分処理した際の値(Fb″)、横軸をZ方向の高さ位置で示している。
【0078】
すなわち、図7Aに示される画像プロファイルに1次微分および2次微分をかけてもグラフが0をクロスする変曲点を得ることはできず、このような場合、取得画像中に液面が存在しないと検知することが可能となる。
【0079】
図8Aは、図3におけるz5の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【0080】
Z方向z5では、画像処理装置6で得られるZ方向プロファイルの途中結果12は図8Aに示されるような形となる。なお、図8Aでは、縦軸を輝度(Fb(z))、横軸をZ方向の高さ位置で示している。
【0081】
このように、取得画像中に液面が存在すると同図に示すような逆Z字形またはZ字形のグラフをもつ画像プロファイルとなる。すなわち、この画像プロファイルが示すグラフの形態がZ字形または逆Z字形になることで、液面検知領域11内に液面が存在することを把握することができる。
【0082】
次に、図8Aに示される画像プロファイルに1次微分処理をかけると図8Bに示されるような、液面位置に凸型のピークを持つグラフをもつ画像プロファイルとなる。なお、図8Bでは、縦軸を、輝度を一次微分処理した際の値(Fb′)、横軸をZ方向の高さ位置で示している。
【0083】
次に、図8Bに示される画像プロファイルに2次微分処理をかけると図8Cに示されるような、丁度、液面位置で(Fb″)=0をクロスするグラフを得て、この0となる位置が元画像プロファイルでの変曲点として検知される。
【0084】
なお、図8Cでは、縦軸を、輝度を一次微分処理した際の値をさらに二次微分処理した際の値(Fb″)、横軸をZ方向の高さ位置で示している。
【0085】
この検知された変曲点が画像プロファイル上での液面位置となる。同図では、その液面位置をレーザ照射位置であるz1からのオフセットZ_offset5として示している。
最終的に、このz1+Z_offset5が、Z方向での液面位置として検知される。
【0086】
すなわち、一次微分処理した後、その二次微分処理することで、液面検知領域11内の液面位置を検知することができる。
【0087】
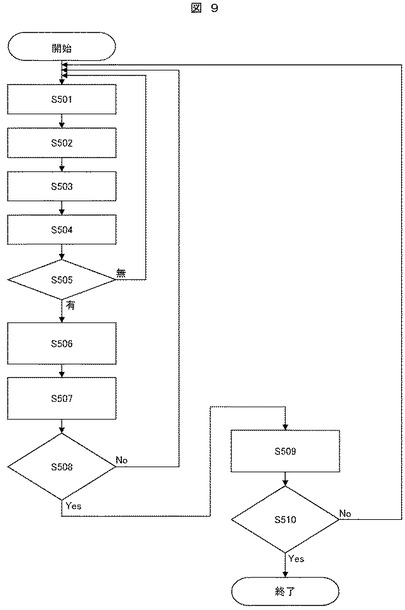
次に本発明の第一の実施形態に係る液面検知装置を使用して、試験管1内の液面を検知する方法について、図9を参照しながら説明する。図9は、本発明の実施形態に係る液面検知工程のフロー図である。ここで、これらのフロー図における各機能を実現するためのプログラムは、コンピュータに読み取り可能なプログラムの形態で記憶部701に格納されており、制御部7はこのプログラムにしたがった動作を逐次実行する。
【0088】
まず、前提として、記憶部701に記憶されたレーザ照射部2と像切り出し部601若しくは/及びカメラ3とのZ方向の相対位置情報に基づき、駆動部201とカメラ駆動部4とによりレーザ照射部2のZ方向の高さ位置と、カメラ駆動部4のZ方向の高さ位置と最適位置となるように制御される。ここでは、カメラ3におけるレンズ301の中心位置のZ方向の高さ位置をzcとする。なお、予め、記憶部701等に、カメラ3のZ方向における移動可能最大値,カメラが撮像する画像の上端値、Z字形または逆Z字形のグラフをもつ画像プロファイルの情報等は記憶されている。また、制御部7は、レーザ照射部2を試験管1の軸心と平行方向に移動させるのに連動して、レーザ202を検出可能な位置に像切り出し部601が、液面検知領域11の切り出す位置,形,大きさを記憶部701に記憶された情報に従って制御する。
【0089】
次に、駆動部201により、レーザ照射部2を、Z方向へzcの高さ位置からΔz分の距離だけ上昇させる(S501)。
【0090】
次にレーザ照射部2からレーザ202を試験管1の側壁へ向けて水平方向へ照射し、試験管1および試験管1内の液状物質101〜103を透過した透過光によりカメラ3が撮像する(S502)。
【0091】
画像処理装置6の像切り出し部601が切り出す、液面検知領域(画像処理領域ともいう。)11をZ方向にΔz分だけ移動する(S503)。
【0092】
次に演算処理部602が、液面検知領域11内の画像を構成する各画素が取得する光量を試験管1の軸心に対し垂直方向に加算し、液面検知領域11内に極値(Z字形または逆Z字形のグラフをもつ画像プロファイル)が有るか否かを探索する(S504)。
【0093】
次に、演算処理部602が処理した結果、極値(Z字形または逆Z字形のグラフをもつ画像プロファイル)が有ったか否かを記憶部701に記憶された情報に基づき、判定する(S505)。
【0094】
その結果、極値が無いのであれば、(S501)へ戻り、極値の有る液面検知領域11が得られるまで上述した(S501)〜(S505)を繰り返す。
【0095】
一方、その結果、極値が有るのであれば、演算処理部602が、(S504)で演算した結果を用いて、得られる輝度曲線に一次微分演算処理および二次微分演算処理を施し、境界面算出部604が、画像上の極値位置(Z_offset位置)を算出する(S506)。
【0096】
次に境界面算出部604が、画像上の極値位置(Z_offset位置)と、zcとで、液境界面位置f(zc,z+Z_offset)を算出する(S507)。
【0097】
ここで、fは任意関数が用いられる。
【0098】
カメラ3が撮像する画像の上端位置に比べ液面検知領域11の上端位置が同等若しくは低いのであれば(Z≧画像上端位置)、(S501)へ戻る(S508)。
【0099】
一方、カメラ3が撮像する画像の上端位置よりも液面検知領域11の上端位置が高いのであれば(Z<画像上端位置)、(S509)へ進む(S508)。
【0100】
なお、(S508)は、(S507)の次の工程とせずに(S505)と(S506)との間、すなわち(S505)の次の工程としても良い。この場合、画像の上端位置よりも液面検知領域11の上端位置が高い場合に、わざわざ(S506)の工程をせずに済む。
【0101】
相対位置算出部603は、演算処理部602が演算処理した結果等に基づき、Z方向の相対位置を算出し、カメラ3をΔstep分だけ上昇させる(S509)。
【0102】
次に、カメラ3の移動度合い(zc+Δstep)がカメラ3移動可能最大値よりも小さいのであれば、(S501)へ戻る(S510)。
【0103】
一方、カメラ3の移動度合い(zc+Δstep)がカメラ3移動可能最大値と同等若しくはそれよりも大きいのであれば、終了する(S510)。
【0104】
なお、(S510)は、(S509)の次の工程とせずに(S508)と(S509)との間、すなわち(S508)の次の工程としても良い。この場合、カメラ3移動可能最大値よりもカメラ3の移動度合い(zc+Δstep)が大きい場合に、わざわざ(S509)の工程をせずに済む。
【0105】
この一連の処理を、試験管全長分について実施することで、試験管内に存在する液面がどの位置にあっても、それを検知することが可能となる。
【0106】
<第二の実施形態>
以下に、本発明の第二の実施形態について図10を参照しながら説明する。
【0107】
図10に示されている通り、上述した本発明の第一の実施形態と構成としては、ほぼ同様であり、異なる点としては、試験管1の側壁であってレーザ照射部分にバーコードラベル紙110が貼り付けられている点と、レーザ照射部からのレーザ光の波長域が異なる点と、レーザ光の波長域に選択的な感度を持つカメラが備えられている点であり、その他は同様である。
【0108】
実際の血液サンプルを入れた容器である試験管1には、多くの場合に、その側面に個別試料を区別するためのバーコードラベル紙110が貼り付けられている。このバーコードラベル紙110は、試験管1のほぼ側面全周が覆われてしまっていることが多い。この場合、上述した特許文献1にも記載のある手法として、光の透過率を計測することによって液面を検知する方法では、バーコードラベルを構成する紙による光の吸収と散乱の影響を受けて、不鮮明な信号となるため、この信号を正確に検知しにくくなるという欠点があった。すなわち、この欠点を考慮すれば、使用条件に制限を受けるという問題があった。
【0109】
また、その他の手法として、単にカメラで撮像し検知する手法があるがこの手法では、試験管1の側壁から検知する場合には、バーコードラベル紙110が貼付けられている隙間がなければ検知できず、また、隙間があったとしても、その隙間を探す必要が生じたり、また、検知する領域が狭くなってしまったりするという欠点があった。すなわち、この欠点を考慮すれば、使用条件に制限を受けるという問題があった。
【0110】
このように試験管1の側壁であってレーザ照射部分にバーコードラベル紙110が貼り付けられている場合には、700nm以上900nm以下の近赤外線領域の波長を持つレーザ2022をレーザ照射部2201から照射する。カメラ311は、検体の液面検知のために、レーザ照射部2021から照射されたレーザ2022が試験管1を透過した透過光としての光学像を撮像(以下、撮影ともいう。)するよう、700nm以上900nm以下の近赤外線領域の波長をもつレーザ2022の波長域に選択的な感度を持つ検出手段若しくは撮像手段として構成されている。
【0111】
700nm以上900nm以下の近赤外線領域の波長をもつレーザ2022は、試験管1および検体のみならず、バーコードラベル紙110をも透過することができるため、レーザ2022の照射位置が、バーコードラベル紙110の配置に依存される等、使用条件に制限を受けることなく、試験管1内の検体の液面を検知する感度と確度を上げることができる。特に、レーザバーコードラベル紙110が側壁全面に貼られているときには有効となる。本実施形態では、バーコードラベル紙110を側面全面に貼られた状態の試験管1内で、可視光では不可視の液面の検知を、ノイズに影響を受けることなく実現することができる。
【0112】
<本発明の他の実施形態>
以上、本発明の実施形態を具体的に説明したが、本発明は上述の実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。
【0113】
例えば、上述した実施形態では、レーザ照射部2や液面検知領域11をZ方向にΔz分の距離だけ上昇させるように説明したが、下降させるように構成しても良い。
【0114】
また、上述した実施形態では、制御部と画像処理装置とモニターとを個別に設けるように説明したが、制御部と画像処理装置とが一体として構成されても良いし、その他2つ以上若しくは全部が一体として構成されても良い。
【0115】
また、上述した実施形態では、モニターを設けるように説明したが、液面検知具合の確認をしなくても良いのであれば、設けなくても良い。
【0116】
また、上述した実施形態では、画像処理装置6に、像切り出し手段としての像切り出し部601と、演算処理手段としての演算処理部602と、相対位置算出手段としての相対位置算出部603と、境界面算出手段としての境界面算出手段604と、が設けられているように説明したが、これらの一つ以上が一体として構成されても良いし、これらの一つ以上が制御部に設けられるように構成されても良い。また、記憶部701が、画像処理装置6に設けられるように構成されても良い。
【符号の説明】
【0117】
1 試験管
2 レーザ照射部
3 撮像装置(カメラ)
4 カメラ駆動部
5 モニター
6 画像処理装置
7 制御部
8 画像
9 照射スポット
10 画像8に写りこんでいる試験管1の像
11 液面検知領域
12 Z方向プロファイルの途中結果
【技術分野】
【0001】
本発明は、液面検知装置に係り、特に、生化学,免疫,遺伝子検査等の技術分野において、血液,尿等の生体などの液状物質をサンプルとして取り扱う液面検知装置に関するものである。
【背景技術】
【0002】
従来からある生化学分析,近年広く使われて来ている免疫分析、または、あらたに市場が拡がって遺伝子分析などの分野で使われる血液自動分析装置の使用現場では、患者より採血した後の血液を遠心分離にかける等の前処理を施す過程に加えて、さらに各該当分析装置まで搬送する過程を自動的に行う装置が使われている。こうした装置は、試験管に入れられた血液サンプルを検体と呼称されることに因んで、一般的に、検体前処理装置と呼ばれている。
【0003】
しかし、こうした検体前処理装置を使っていても、実際の分析作業の現場では、いまだに一部の作業は、手作業に依存しており、こうした作業が日々繰り返されている。
【0004】
そうした作業の1つとして、遠心分離後に試験管内にある血清量から可能な分析項目を割り出す作業がある。この作業において、仮に、元々ある血清量よりも多くの血清量を必要とする分析項目を計画してしまうと、この分析項目を実施する過程における最終段階では、試験管内に残った少ない量を吸い出して分注せざるを得なくなり、本来吸ってはいけない血清下の分離剤を吸ってしまい、分注エラーを起こすことがあった。
【0005】
従来技術による検体前処理装置では、分注エラーを起こしてしまったら、その復旧作業を行わなければならないため、その分だけ装置稼働率を落とす結果を招いていた。
【0006】
従来からも、こうした事態へ対応する技術としては、物理的に大きな赤外光面光源やラインセンサ等を設けたり、プローブを垂らして液面との静電容量を計測したりして試験管内の液面を検知する手法が提案されている。その一例を特許文献1に示す。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第03733086号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上述した手法のうち、特許文献1に記載の手法では、物理的に大きな赤外光面光源やラインセンサを設けなければならず、設置スペース的にもコスト的にも無駄が多く、使用条件に制限を受けるという問題があった。
【0009】
また、上述した手法のうち、静電容量による手法では、実際にプローブを試験管内へ差し入れるために栓をいったん開く必要があり、開いた試験管内に汚染物が入り込み、試料が汚染されてしまうという欠点があった。さらには、試験管内へプローブを差し入れた際に、プローブに試料等が付着し、その後に、新たに別の試験管内へプローブを差し入れると、プローブに付着した試料等の付着物により、当該別の試験管内の試料が汚染されたりしてしまうという欠点があった。これらの欠点である試料間での汚染を考慮すれば、使用条件に制限を受けるという問題があった。
【0010】
本発明は、このような点に鑑みてなされたものであり、使用条件に制限を受けることなく、筒状容器内の液面を正確に検知する装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明の一態様によれば、液状物質が収納された筒状容器の一部に光を照射する照射部と、該照射部から照射された光が前記筒状容器を透過した透過光を検出する検出部とを有する液面検知装置であって、前記照射部を前記筒状容器の軸心と平行方向に移動させるのに連動して、前記透過光を検出可能な位置に前記検出部を移動させるように、前記照射部と前記検知部との相対位置を制御する制御部を有する液面検知装置が提供される。
【発明の効果】
【0012】
本発明に係る液面検知装置によれば、使用条件に制限を受けることなく、試験管内の液面を正確に検知することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の第一の実施形態の構成を示す図である。
【図2】本発明の第一の実施形態にかかる試験管の画像と、その画像処理結果であるZ方向位置z1のときのZ方向プロファイルとの関係を示した説明図である。
【図3】図2で示した、各Z方向位置z1〜z5夫々の液面検知領域を使った画像処理の途中結果を示した図である。
【図4A】図3におけるz1の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【図4B】図4Aに示される画像プロファイルに1次微分処理をかけた際に示される図である。
【図4C】図4Bに示される画像プロファイルに2次微分処理をかけた際に示される図である。
【図5A】図3におけるz2の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【図5B】図5Aに示される画像プロファイルに1次微分処理をかけた際に示される図である。
【図5C】図5Bに示される画像プロファイルに2次微分処理をかけた際に示される図である。
【図6A】図3におけるz3の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【図6B】図6Aに示される画像プロファイルに1次微分処理をかけた際に示される図である。
【図6C】図6Bに示される画像プロファイルに2次微分処理をかけた際に示される図である。
【図7A】図3におけるz4の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【図7B】図7Aに示される画像プロファイルに1次微分処理をかけた際に示される図である。
【図7C】図7Bに示される画像プロファイルに2次微分処理をかけた際に示される図である。
【図8A】図3におけるz5の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【図8B】図8Aに示される画像プロファイルに1次微分処理をかけた際に示される図である。
【図8C】図8Bに示される画像プロファイルに2次微分処理をかけた際に示される図である。
【図9】本発明の第一の実施形態にかかるフローを示した説明図である。
【図10】本発明の第二の実施形態の構成を示す図である。
【発明を実施するための形態】
【0014】
<本発明の第一の実施形態>
以下、本発明の一実施形態を図面に即して説明する。なお、この実施の形態は例示として挙げるものであり、これにより本発明を限定的に解釈するものではない。
【0015】
まず、本発明の一実施形態に係る液面検知装置について説明する。
【0016】
図1は、本発明の第一の実施形態に係る液面検知装置の構成図である。図1に示されているように、検体としての液状物質101〜103が、筒状容器としての試験管1に収納されている。
【0017】
液状物質101〜103としては、例えば、患者から採取した血液検体であり、血液検体は、遠心分離等の方法により、下層側の血餅101層と、上層側の血清103層とに分離されている。試験管1には、さらに、分離剤102が収納されており、血餅101と血清103とは、分離剤102層によって隔離されているよう構成されている。
【0018】
試験管1は、各種樹脂材料や各種ガラス材料などから構成された実質的に透明な上下方向に細長い有底筒状であって、円筒状あるいはテーパ状の容器である。
【0019】
図1に示されているように、ここでは、試験管1の軸心に対し平行方向をZ方向、試験管1の軸心に対し垂直方向をX方向,Y方向としている。
【0020】
なお、液状物質101〜103としては、血液や尿等の生体試料,当該生体試料と試薬とを混合した混合液、これらが反応した反応液等が挙げられる。
【0021】
試験管1は、図示しない試験管保持部に保持されている。試験管保持部は、図示しない試験管保持台に保持されている。
【0022】
なお、試験管1が、試験管保持部または/および試験管保持台に保持された状態でなくても、例えば、試験管1単独でも本発明の液面検知装置にて、液面を検知するようにしても良い。
【0023】
試験管1の側壁外側であって一方側には、光としてのレーザ202を試験管1へ照射する光照射手段としてのレーザ照射部2が設けられている。レーザ照射部2は、光源として、検体の液面を検知するために、試験管1の側壁に向けてレーザ202を照射するように構成されている。なお、レーザ照射部2は、特にレーザ発振装置として構成しても良い。
【0024】
レーザ照射部2は、レーザ照射部2を試験管1の軸心と平行方向へ移動させる駆動手段としての駆動部201により保持されている。
【0025】
駆動部201は、レーザ照射部2を昇降させるように構成されている。すなわち、図1に示されているように、駆動部201は、レーザ照射部2をZ方向に移動させるように構成されている。駆動部201は、ボールねじやギア,タイミングベルト等をモータ等により駆動されるように構成されている。駆動部201は、試験管1の軸心に対し平行方向に置かれたガイドに沿って移動するよう構成されている。
【0026】
試験管1の側壁外側であって他方側には、撮像部としてのカメラ3が設けられている。
カメラ3は、試験管1を挟んでレーザ照射部2と対向する位置に配置されるように構成されている。カメラ3は、検体の液面検知のために、レーザ照射部2から照射されたレーザ202が試験管1を透過した透過光としての光学像を少なくとも含む、試験管1側壁を撮像(以下、撮影ともいう。)する撮像手段として構成されている。
【0027】
カメラ3には、レーザ照射部2から照射されたレーザ202が試験管1を透過した光学像を少なくとも含む、試験管1側壁を一旦結像するための結像部、結像手段としてのレンズ301が設けられている。さらに、カメラ3には、レンズ301で結像した像を結ぶ位置に複数の結像検出器が格子状に並んで構成された撮像媒体302が設けられている。
【0028】
カメラ3は、カメラ3を試験管1の軸心と平行方向へ移動させる駆動手段としてのカメラ駆動部4により保持されている。
【0029】
カメラ駆動部4は、カメラ3を昇降させるように構成されている。すなわち、図1に示されているように、カメラ駆動部4は、カメラ3をZ方向に移動させるように構成されている。カメラ駆動部4は、ボールねじやギア,タイミングベルト等をモータ等により駆動されるように構成されている。カメラ駆動部4は、試験管1の軸心に対し平行方向に置かれたガイドに沿って移動するよう構成されている。
【0030】
カメラ駆動部4は、後述する制御部7による制御により、カメラ3をレーザ照射部2のZ方向への移動にともなって試験管1の撮像視野を必要に応じて移動させるためにカメラ3をZ方向へ移動させるように構成されている。
【0031】
カメラ3は、カメラ3が撮像する映像(画像ともいう。)を表示するための表示部としてのモニター5に電気的に接続されている。
【0032】
モニター5は、例えばCRT(Cathode-Ray Tube),液晶ディスプレイなどで構成されており、操作画面,データ入力画面,カメラ3が次々に映し出す映像や撮像した映像、若しくは、後述する画像処理装置6にて処理された画像をモニターする表示手段として構成されている。
【0033】
カメラ3は、カメラ3が次々に映し出す映像を画像処理にかけて液面検知結果を出力する画像処理手段としての画像処理装置6に電気的に接続されている。
【0034】
画像処理装置6は、カメラ3からの映像を画像処理して液面検知結果を出力するよう構成されている。
【0035】
具体的には、画像処理装置6は、カメラ3の撮像媒体302から得られる試験管1内の液体像から異なる液体同士の境界面または液体と気体との境界面を抽出可能なように構成される。
【0036】
画像処理装置6には、像切り出し手段としての像切り出し部601と、演算処理手段としての演算処理部602と、相対位置算出手段としての相対位置算出部603と、境界面算出手段としての境界面算出手段604と、が設けられている。
【0037】
検出部若しくは検出手段としての像切り出し部601は、カメラ3の撮像媒体302によって得られた像の一部を切り出すように構成されている。像切り出し部601は、液面を、画像処理しやすくするため、若しくは、より正確に検知しやすくするために画像処理上、必要とされる領域を特定し、切り出すように構成されている。
【0038】
具体的には、像切り出し部601は、撮像媒体302によって得られた像の一部として透過光の存在する領域を液面検知領域として切り出すように構成されている。
【0039】
演算処理部602は、画像を構成する各画素が取得する光量を試験管1の軸心に対し垂直方向に加算し、得られる輝度曲線に演算処理を施すように構成されている。
【0040】
具体的には、演算処理部602は、画像を構成する各画素が取得する光量を試験管1の軸心に対し垂直方向に加算し、得られる輝度曲線に一次微分演算処理および二次微分演算処理を施すように構成されている。好適には、演算処理部602は、画像として、像切り出し部601が切り出した液面検知領域を構成する各画素が取得する光量を試験管1の軸心に対し垂直方向に加算し、得られる輝度曲線に一次微分演算処理および二次微分演算処理を施すように構成されていると良い。
【0041】
相対位置算出部603は、演算処理部602が演算処理した結果等に基づき、Z方向のレーザ照射部2,カメラ3との相対位置を算出するように構成されている。なお、相対位置算出部603は、演算処理部602が演算処理した結果等に基づき、Z方向のレーザ照射部2,カメラ3との相対位置と、レーザ照射部2と像切り出し部601が切り出した液面検知領域との相対位置とを算出するように構成されていても良い。
【0042】
境界面算出部604は、演算処理部602が演算処理した際に、異なる液体同士の境界面または液体と気体との境界面を検出したときに、その画像中での境界面位置を求め、さらに、この境界面位置と相対位置算出部603が算出したカメラ3の移動量とに基づき、試験管1内での異なる液体同士の境界面または液体と気体との境界面のZ方向での位置を算出するように構成されている。なお、境界面算出部604は、演算処理部602が演算処理した際に、異なる液体同士の境界面または液体と気体との境界面を検出したときに、その画像中での境界面位置を求め、さらに、この境界面位置と相対位置算出部603が算出したカメラ3の移動量、レーザ照射部2と像切り出し部601が切り出した液面検知領域との相対位置とに基づき、試験管1内での異なる液体同士の境界面または液体と気体との境界面のZ方向での位置を算出するように構成されていても良い。
【0043】
画像処理装置6は、画像処理した液面検知結果を出力し表示させるようにモニター5に電気的に接続されている。
【0044】
駆動部201,カメラ駆動部4,モニター5,画像処理装置6は、少なくとも駆動部201,カメラ駆動部4,画像処理装置6を制御する制御部7に電気的に接続されている。
【0045】
制御部7は、レーザ照射部2を試験管1の軸心と平行方向に移動させるのに連動して、試験管1を透過した透過光を検出可能な位置に像切り出し部601若しくは/及びカメラ3を移動させるように、レーザ照射部2とカメラ3とのZ方向の相対位置を制御するように構成されている。
【0046】
制御部7には、記憶手段としての記憶部701が設けられている。
【0047】
記憶部701は、レーザ照射部2と像切り出し部601若しくは/及びカメラ3の相対的な位置関係が、各液層を構成する既知の液状物質の各境界面を挟んでの組合せに関連付けされて記憶される等の、レーザ照射部2とカメラ3とのZ方向の相対位置情報や、液面検知装置の各部に対応する各種アプリケーションプログラム、後述するフローチャートを実行するためのプログラム等の各種プログラムおよび各種データが予め記憶されているとともに、各プログラムで処理されたデータおよび制御部7に接続された各部からの入力データ等が記憶されるように構成されている。
【0048】
次に、本発明の第一の実施形態に係る液面検知装置において、画像処理装置6へ入力される試験管1の画像と、画像処理装置6による画像処理結果であるZ方向プロファイルとの関係を図2に示す。
【0049】
8は、画像処理装置6に入力される試験管1の側壁を写した画像を、9は画像8に写りこんでいるレーザ照射部2の照射スポットを、10は画像8に写りこんでいる試験管1の像を、11は画像8上にレーザ照射部2の移動に合わせて移動させる像切り出し部601が切り出す液面検知領域を示している。
【0050】
これらの画像8は、紙面横方向左から右に順番にレーザ照射部2のZ方向高さがz1,z2,z3・・・とz1〜z5まで順々に変わるに従って液面検知領域11の画像8上の位置をZ方向へzcの高さ位置からΔZ分ずつ移動させることを示している。なお、ここで言うzcとは、カメラ3におけるレンズ301の中心位置の高さ位置であるが、適宜、変更が可能であり、例えば、レンズ301の下端位置の高さ位置をzcとして定義しても良い。
【0051】
図3に、図2で示した、画像8の中の液面検知領域11を使った画像処理装置6による画像処理の途中結果12を液面検知に使用するためのZ方向プロファイルを各Z方向位置z1〜z5夫々に対して夫々、示している。なお、この途中結果12は、画像処置装置6の演算処理部602が、画像を構成する各画素が取得する光量を試験管1の軸心に対し垂直方向に加算し得られた輝度曲線として示されている。ここで、異なる液体同士の境界面または液体と気体との境界面に照射スポット9がかかる場合には、光の屈折具合等が液体同士、液体と気体とで異なることとなるため、輝度が急激に変化する箇所が、境界面だと判定することができることとなる。
【0052】
次に、図4〜図8に、図3で示したz1〜z5の高さ位置夫々における液面検知領域11から得られたZ方向プロファイルの途中結果12からの一連の画像処理装置6の演算処理部602における画像処理の流れを各Z方向位置に関連させて示している。
【0053】
図4Aは、図3におけるz1の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【0054】
Z方向z1では、画像処理装置6で得られるZ方向プロファイルの途中結果12は図4Aに示されるような形となる。なお、図4Aでは、縦軸を輝度(Fb(z))、横軸をZ方向の高さ位置で示している。
【0055】
このように、取得画像中に液面が存在すると同図に示すようなZ字形または逆Z字形のグラフをもつ画像プロファイルとなる。すなわち、この画像プロファイルが示すグラフの形態がZ字形または逆Z字形になることで、液面検知領域11内に液面が存在することを把握することができる。
【0056】
次に、図4Aに示される画像プロファイルに1次微分処理をかけると図4Bに示されるような、液面位置に凸型のピークを持つグラフをもつ画像プロファイルとなる。なお、図4Bでは、縦軸を、輝度を一次微分処理した際の値(Fb′)、横軸をZ方向の高さ位置で示している。
【0057】
次に、図4Bに示される画像プロファイルに2次微分処理をかけると図4Cに示されるような、丁度、液面位置で(Fb″)=0をクロスするグラフを得て、この0となる位置が元画像プロファイルでの変曲点として検知される。
【0058】
なお、図4Cでは、縦軸を、輝度を一次微分処理した際の値をさらに二次微分処理した際の値(Fb″)、横軸をZ方向の高さ位置で示している。
【0059】
この検知された変曲点が画像プロファイル上での液面位置となる。同図では、その液面位置をレーザ照射位置であるz1からのオフセットZ_offset1として示している。
最終的に、このz1+Z_offset1が、Z方向での液面位置として検知される。
【0060】
すなわち、一次微分処理した後、その二次微分処理することで、液面検知領域11内の液面位置を検知することができる。
【0061】
図5Aは、図3におけるz2の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【0062】
Z方向z2では、画像処理装置6で得られるZ方向プロファイルの途中結果12は図5Aに示されるような形となる。なお、図5Aでは、縦軸を輝度(Fb(z))、横軸をZ方向の高さ位置で示している。
【0063】
このように、取得画像中に液面が存在しないと同図に示すような上に凸形のグラフをもつ画像プロファイルとなる。すなわち、この画像プロファイルが示すグラフの形態が上に凸形になることで、液面検知領域11内に液面が存在しないことを把握することができる。
【0064】
次に、図5Aに示される画像プロファイルに1次微分処理をかけると図5Bに示されるような、凸型のピークが持たないグラフをもつ画像プロファイルとなる。なお、図5Bでは、縦軸を、輝度を一次微分処理した際の値(Fb′)、横軸をZ方向の高さ位置で示している。
【0065】
次に、図5Bに示される画像プロファイルに2次微分処理をかけると図5Cに示されるような、グラフが(Fb″)=0をクロスする変曲点を得ることができない。なお、図5Cでは、縦軸を、輝度を一次微分処理した際の値をさらに二次微分処理した際の値(Fb″)、横軸をZ方向の高さ位置で示している。
【0066】
すなわち、図5Aに示される画像プロファイルに1次微分および2次微分をかけてもグラフが(Fb″)=0をクロスする変曲点を得ることはできず、このような場合、取得画像中に液面が存在しないと検知することが可能となる。
【0067】
図6Aは、図3におけるz3の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【0068】
Z方向z3では、画像処理装置6で得られるZ方向プロファイルの途中結果12は図6Aに示されるような形となる。なお、図6Aでは、縦軸を輝度(Fb(z))、横軸をZ方向の高さ位置で示している。
【0069】
このように、取得画像中に液面が存在しないと同図に示すような上に凸形のグラフをもつ画像プロファイルとなる。すなわち、この画像プロファイルが示すグラフの形態が上に凸形になることで、液面検知領域11内に液面が存在しないことを把握することができる。
【0070】
次に、図6Aに示される画像プロファイルに1次微分処理をかけると図6Bに示されるような、凸型のピークが持たないグラフをもつ画像プロファイルとなる。なお、図6Bでは、縦軸を、輝度を一次微分処理した際の値(Fb′)、横軸をZ方向の高さ位置で示している。
【0071】
次に、図6Bに示される画像プロファイルに2次微分処理をかけると図6Cに示されるような、グラフが(Fb″)=0をクロスする変曲点を得ることができない。なお、図6Cでは、縦軸を、輝度を一次微分処理した際の値をさらに二次微分処理した際の値(Fb″)、横軸をZ方向の高さ位置で示している。
【0072】
すなわち、図6Aに示される画像プロファイルに1次微分および2次微分をかけてもグラフが0をクロスする変曲点を得ることはできず、このような場合、取得画像中に液面が存在しないと検知することが可能となる。
【0073】
図7Aは、図3におけるz4の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【0074】
Z方向z4では、画像処理装置6で得られるZ方向プロファイルの途中結果12は図7Aに示されるような形となる。なお、図7Aでは、縦軸を輝度(Fb(z))、横軸をZ方向の高さ位置で示している。
【0075】
このように、取得画像中に液面が存在しないと同図に示すような上に凸形のグラフをもつ画像プロファイルとなる。すなわち、この画像プロファイルが示すグラフの形態が上に凸形になることで、液面検知領域11内に液面が存在しないことを把握することができる。
【0076】
次に、図7Aに示される画像プロファイルに1次微分処理をかけると図7Bに示されるような、凸型のピークが持たないグラフをもつ画像プロファイルとなる。なお、図7Bでは、縦軸を、輝度を一次微分処理した際の値(Fb′)、横軸をZ方向の高さ位置で示している。
【0077】
次に、図7Bに示される画像プロファイルに2次微分処理をかけると図7Cに示されるような、グラフが(Fb″)=0をクロスする変曲点を得ることができない。なお、図7Cでは、縦軸を、輝度を一次微分処理した際の値をさらに二次微分処理した際の値(Fb″)、横軸をZ方向の高さ位置で示している。
【0078】
すなわち、図7Aに示される画像プロファイルに1次微分および2次微分をかけてもグラフが0をクロスする変曲点を得ることはできず、このような場合、取得画像中に液面が存在しないと検知することが可能となる。
【0079】
図8Aは、図3におけるz5の高さ位置における液面検知領域11から得られたZ方向プロファイルの途中結果12を90度反時計回りに回転させた図である。
【0080】
Z方向z5では、画像処理装置6で得られるZ方向プロファイルの途中結果12は図8Aに示されるような形となる。なお、図8Aでは、縦軸を輝度(Fb(z))、横軸をZ方向の高さ位置で示している。
【0081】
このように、取得画像中に液面が存在すると同図に示すような逆Z字形またはZ字形のグラフをもつ画像プロファイルとなる。すなわち、この画像プロファイルが示すグラフの形態がZ字形または逆Z字形になることで、液面検知領域11内に液面が存在することを把握することができる。
【0082】
次に、図8Aに示される画像プロファイルに1次微分処理をかけると図8Bに示されるような、液面位置に凸型のピークを持つグラフをもつ画像プロファイルとなる。なお、図8Bでは、縦軸を、輝度を一次微分処理した際の値(Fb′)、横軸をZ方向の高さ位置で示している。
【0083】
次に、図8Bに示される画像プロファイルに2次微分処理をかけると図8Cに示されるような、丁度、液面位置で(Fb″)=0をクロスするグラフを得て、この0となる位置が元画像プロファイルでの変曲点として検知される。
【0084】
なお、図8Cでは、縦軸を、輝度を一次微分処理した際の値をさらに二次微分処理した際の値(Fb″)、横軸をZ方向の高さ位置で示している。
【0085】
この検知された変曲点が画像プロファイル上での液面位置となる。同図では、その液面位置をレーザ照射位置であるz1からのオフセットZ_offset5として示している。
最終的に、このz1+Z_offset5が、Z方向での液面位置として検知される。
【0086】
すなわち、一次微分処理した後、その二次微分処理することで、液面検知領域11内の液面位置を検知することができる。
【0087】
次に本発明の第一の実施形態に係る液面検知装置を使用して、試験管1内の液面を検知する方法について、図9を参照しながら説明する。図9は、本発明の実施形態に係る液面検知工程のフロー図である。ここで、これらのフロー図における各機能を実現するためのプログラムは、コンピュータに読み取り可能なプログラムの形態で記憶部701に格納されており、制御部7はこのプログラムにしたがった動作を逐次実行する。
【0088】
まず、前提として、記憶部701に記憶されたレーザ照射部2と像切り出し部601若しくは/及びカメラ3とのZ方向の相対位置情報に基づき、駆動部201とカメラ駆動部4とによりレーザ照射部2のZ方向の高さ位置と、カメラ駆動部4のZ方向の高さ位置と最適位置となるように制御される。ここでは、カメラ3におけるレンズ301の中心位置のZ方向の高さ位置をzcとする。なお、予め、記憶部701等に、カメラ3のZ方向における移動可能最大値,カメラが撮像する画像の上端値、Z字形または逆Z字形のグラフをもつ画像プロファイルの情報等は記憶されている。また、制御部7は、レーザ照射部2を試験管1の軸心と平行方向に移動させるのに連動して、レーザ202を検出可能な位置に像切り出し部601が、液面検知領域11の切り出す位置,形,大きさを記憶部701に記憶された情報に従って制御する。
【0089】
次に、駆動部201により、レーザ照射部2を、Z方向へzcの高さ位置からΔz分の距離だけ上昇させる(S501)。
【0090】
次にレーザ照射部2からレーザ202を試験管1の側壁へ向けて水平方向へ照射し、試験管1および試験管1内の液状物質101〜103を透過した透過光によりカメラ3が撮像する(S502)。
【0091】
画像処理装置6の像切り出し部601が切り出す、液面検知領域(画像処理領域ともいう。)11をZ方向にΔz分だけ移動する(S503)。
【0092】
次に演算処理部602が、液面検知領域11内の画像を構成する各画素が取得する光量を試験管1の軸心に対し垂直方向に加算し、液面検知領域11内に極値(Z字形または逆Z字形のグラフをもつ画像プロファイル)が有るか否かを探索する(S504)。
【0093】
次に、演算処理部602が処理した結果、極値(Z字形または逆Z字形のグラフをもつ画像プロファイル)が有ったか否かを記憶部701に記憶された情報に基づき、判定する(S505)。
【0094】
その結果、極値が無いのであれば、(S501)へ戻り、極値の有る液面検知領域11が得られるまで上述した(S501)〜(S505)を繰り返す。
【0095】
一方、その結果、極値が有るのであれば、演算処理部602が、(S504)で演算した結果を用いて、得られる輝度曲線に一次微分演算処理および二次微分演算処理を施し、境界面算出部604が、画像上の極値位置(Z_offset位置)を算出する(S506)。
【0096】
次に境界面算出部604が、画像上の極値位置(Z_offset位置)と、zcとで、液境界面位置f(zc,z+Z_offset)を算出する(S507)。
【0097】
ここで、fは任意関数が用いられる。
【0098】
カメラ3が撮像する画像の上端位置に比べ液面検知領域11の上端位置が同等若しくは低いのであれば(Z≧画像上端位置)、(S501)へ戻る(S508)。
【0099】
一方、カメラ3が撮像する画像の上端位置よりも液面検知領域11の上端位置が高いのであれば(Z<画像上端位置)、(S509)へ進む(S508)。
【0100】
なお、(S508)は、(S507)の次の工程とせずに(S505)と(S506)との間、すなわち(S505)の次の工程としても良い。この場合、画像の上端位置よりも液面検知領域11の上端位置が高い場合に、わざわざ(S506)の工程をせずに済む。
【0101】
相対位置算出部603は、演算処理部602が演算処理した結果等に基づき、Z方向の相対位置を算出し、カメラ3をΔstep分だけ上昇させる(S509)。
【0102】
次に、カメラ3の移動度合い(zc+Δstep)がカメラ3移動可能最大値よりも小さいのであれば、(S501)へ戻る(S510)。
【0103】
一方、カメラ3の移動度合い(zc+Δstep)がカメラ3移動可能最大値と同等若しくはそれよりも大きいのであれば、終了する(S510)。
【0104】
なお、(S510)は、(S509)の次の工程とせずに(S508)と(S509)との間、すなわち(S508)の次の工程としても良い。この場合、カメラ3移動可能最大値よりもカメラ3の移動度合い(zc+Δstep)が大きい場合に、わざわざ(S509)の工程をせずに済む。
【0105】
この一連の処理を、試験管全長分について実施することで、試験管内に存在する液面がどの位置にあっても、それを検知することが可能となる。
【0106】
<第二の実施形態>
以下に、本発明の第二の実施形態について図10を参照しながら説明する。
【0107】
図10に示されている通り、上述した本発明の第一の実施形態と構成としては、ほぼ同様であり、異なる点としては、試験管1の側壁であってレーザ照射部分にバーコードラベル紙110が貼り付けられている点と、レーザ照射部からのレーザ光の波長域が異なる点と、レーザ光の波長域に選択的な感度を持つカメラが備えられている点であり、その他は同様である。
【0108】
実際の血液サンプルを入れた容器である試験管1には、多くの場合に、その側面に個別試料を区別するためのバーコードラベル紙110が貼り付けられている。このバーコードラベル紙110は、試験管1のほぼ側面全周が覆われてしまっていることが多い。この場合、上述した特許文献1にも記載のある手法として、光の透過率を計測することによって液面を検知する方法では、バーコードラベルを構成する紙による光の吸収と散乱の影響を受けて、不鮮明な信号となるため、この信号を正確に検知しにくくなるという欠点があった。すなわち、この欠点を考慮すれば、使用条件に制限を受けるという問題があった。
【0109】
また、その他の手法として、単にカメラで撮像し検知する手法があるがこの手法では、試験管1の側壁から検知する場合には、バーコードラベル紙110が貼付けられている隙間がなければ検知できず、また、隙間があったとしても、その隙間を探す必要が生じたり、また、検知する領域が狭くなってしまったりするという欠点があった。すなわち、この欠点を考慮すれば、使用条件に制限を受けるという問題があった。
【0110】
このように試験管1の側壁であってレーザ照射部分にバーコードラベル紙110が貼り付けられている場合には、700nm以上900nm以下の近赤外線領域の波長を持つレーザ2022をレーザ照射部2201から照射する。カメラ311は、検体の液面検知のために、レーザ照射部2021から照射されたレーザ2022が試験管1を透過した透過光としての光学像を撮像(以下、撮影ともいう。)するよう、700nm以上900nm以下の近赤外線領域の波長をもつレーザ2022の波長域に選択的な感度を持つ検出手段若しくは撮像手段として構成されている。
【0111】
700nm以上900nm以下の近赤外線領域の波長をもつレーザ2022は、試験管1および検体のみならず、バーコードラベル紙110をも透過することができるため、レーザ2022の照射位置が、バーコードラベル紙110の配置に依存される等、使用条件に制限を受けることなく、試験管1内の検体の液面を検知する感度と確度を上げることができる。特に、レーザバーコードラベル紙110が側壁全面に貼られているときには有効となる。本実施形態では、バーコードラベル紙110を側面全面に貼られた状態の試験管1内で、可視光では不可視の液面の検知を、ノイズに影響を受けることなく実現することができる。
【0112】
<本発明の他の実施形態>
以上、本発明の実施形態を具体的に説明したが、本発明は上述の実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。
【0113】
例えば、上述した実施形態では、レーザ照射部2や液面検知領域11をZ方向にΔz分の距離だけ上昇させるように説明したが、下降させるように構成しても良い。
【0114】
また、上述した実施形態では、制御部と画像処理装置とモニターとを個別に設けるように説明したが、制御部と画像処理装置とが一体として構成されても良いし、その他2つ以上若しくは全部が一体として構成されても良い。
【0115】
また、上述した実施形態では、モニターを設けるように説明したが、液面検知具合の確認をしなくても良いのであれば、設けなくても良い。
【0116】
また、上述した実施形態では、画像処理装置6に、像切り出し手段としての像切り出し部601と、演算処理手段としての演算処理部602と、相対位置算出手段としての相対位置算出部603と、境界面算出手段としての境界面算出手段604と、が設けられているように説明したが、これらの一つ以上が一体として構成されても良いし、これらの一つ以上が制御部に設けられるように構成されても良い。また、記憶部701が、画像処理装置6に設けられるように構成されても良い。
【符号の説明】
【0117】
1 試験管
2 レーザ照射部
3 撮像装置(カメラ)
4 カメラ駆動部
5 モニター
6 画像処理装置
7 制御部
8 画像
9 照射スポット
10 画像8に写りこんでいる試験管1の像
11 液面検知領域
12 Z方向プロファイルの途中結果
【特許請求の範囲】
【請求項1】
液状物質が収納された筒状容器の一部に光を照射する照射部と、該照射部から照射された光が前記筒状容器を透過した透過光を検出する検出部とを有する液面検知装置であって、
前記照射部を前記筒状容器の軸心と平行方向に移動させるのに連動して、前記透過光を検出可能な位置に前記検出部を移動させるように、前記照射部と前記検知部との相対位置を制御する制御部を有する液面検知装置。
【請求項2】
前記照射部を前記筒状容器の軸心と平行方向に移動させる第一駆動部と、前記筒状容器を撮像する撮像部を前記筒状容器の軸心と平行方向に移動させる第二駆動部と、
前記照射部を前記筒状容器の軸心と平行方向に移動させるのに連動して、前記透過光を検出可能な位置に前記撮像部を移動させるように、前記照射部と前記撮像部との相対位置情報を記憶する記憶部を有し、前記制御部は、前記相対位置記憶部に記憶された前記相対位置情報を基に前記第一駆動部および前記第二駆動部とを制御する請求項1の液面検知装置。
【請求項3】
請求項1の液面検知装置において、
前記筒状容器を撮像する撮像部からの前記筒状容器の画像を処理して液面を検知する画像処理装置を備えている液面検知装置。
【請求項4】
請求項1の液面検知装置において、
前記筒状容器を撮像する撮像部を有し前記検出器は、前記撮像部によって得られた画像の一部を切り出すように構成されている液面検知装置。
【請求項5】
請求項1の液面検知装置において、
前記筒状容器を撮像する撮像部を有し、前記撮像部によって得られた画像を構成する各画素にて取得する光量を前記筒状容器の軸心方向とは垂直方向に加算処理したことにより得られる輝度曲線に演算処理を施し
前記画像から異なる液体同士の境界面または液体と気体との境界面を抽出する演算処理部を有する液面検知装置。
【請求項6】
請求項5の液面検知装置において、
前記演算処理部は、前記輝度曲線に二次微分演算をかけることで、前記輝度曲線の変曲点を求め、その結果を基に前記画像から異なる液体同士の境界面または液体と気体との境界面を抽出する液面検知装置。
【請求項7】
請求項5の液面検知装置において、
前記輝度曲線の演算処理によって液体間境界面または液体間境界面を検知したときに、前記画像中での境界面位置を求める境界面算出部を有する液面検知装置。
【請求項8】
請求項7の液面検知装置において、
前記境界面算出部は、
前記求めた境界面位置と、前記撮像部の移動量と、に基づき、前記筒状容器内での前記境界面の前記筒状容器の軸心と平行方向の位置を求める液面検知装置。
【請求項9】
請求項1乃至請求項8の液面検知装置において、
前記照射部からの光の波長は、700nm以上900nm以下の領域である液面検知装置。
【請求項1】
液状物質が収納された筒状容器の一部に光を照射する照射部と、該照射部から照射された光が前記筒状容器を透過した透過光を検出する検出部とを有する液面検知装置であって、
前記照射部を前記筒状容器の軸心と平行方向に移動させるのに連動して、前記透過光を検出可能な位置に前記検出部を移動させるように、前記照射部と前記検知部との相対位置を制御する制御部を有する液面検知装置。
【請求項2】
前記照射部を前記筒状容器の軸心と平行方向に移動させる第一駆動部と、前記筒状容器を撮像する撮像部を前記筒状容器の軸心と平行方向に移動させる第二駆動部と、
前記照射部を前記筒状容器の軸心と平行方向に移動させるのに連動して、前記透過光を検出可能な位置に前記撮像部を移動させるように、前記照射部と前記撮像部との相対位置情報を記憶する記憶部を有し、前記制御部は、前記相対位置記憶部に記憶された前記相対位置情報を基に前記第一駆動部および前記第二駆動部とを制御する請求項1の液面検知装置。
【請求項3】
請求項1の液面検知装置において、
前記筒状容器を撮像する撮像部からの前記筒状容器の画像を処理して液面を検知する画像処理装置を備えている液面検知装置。
【請求項4】
請求項1の液面検知装置において、
前記筒状容器を撮像する撮像部を有し前記検出器は、前記撮像部によって得られた画像の一部を切り出すように構成されている液面検知装置。
【請求項5】
請求項1の液面検知装置において、
前記筒状容器を撮像する撮像部を有し、前記撮像部によって得られた画像を構成する各画素にて取得する光量を前記筒状容器の軸心方向とは垂直方向に加算処理したことにより得られる輝度曲線に演算処理を施し
前記画像から異なる液体同士の境界面または液体と気体との境界面を抽出する演算処理部を有する液面検知装置。
【請求項6】
請求項5の液面検知装置において、
前記演算処理部は、前記輝度曲線に二次微分演算をかけることで、前記輝度曲線の変曲点を求め、その結果を基に前記画像から異なる液体同士の境界面または液体と気体との境界面を抽出する液面検知装置。
【請求項7】
請求項5の液面検知装置において、
前記輝度曲線の演算処理によって液体間境界面または液体間境界面を検知したときに、前記画像中での境界面位置を求める境界面算出部を有する液面検知装置。
【請求項8】
請求項7の液面検知装置において、
前記境界面算出部は、
前記求めた境界面位置と、前記撮像部の移動量と、に基づき、前記筒状容器内での前記境界面の前記筒状容器の軸心と平行方向の位置を求める液面検知装置。
【請求項9】
請求項1乃至請求項8の液面検知装置において、
前記照射部からの光の波長は、700nm以上900nm以下の領域である液面検知装置。
【図1】


【図2】
【図3】
【図4A】

【図4B】

【図4C】

【図5A】

【図5B】

【図5C】

【図6A】

【図6B】

【図6C】

【図7A】

【図7B】

【図7C】

【図8A】

【図8B】

【図8C】

【図9】
【図10】

【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5A】
【図5B】
【図5C】
【図6A】
【図6B】
【図6C】
【図7A】
【図7B】
【図7C】
【図8A】
【図8B】
【図8C】
【図9】
【図10】
【公開番号】特開2012−173226(P2012−173226A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−37772(P2011−37772)
【出願日】平成23年2月24日(2011.2.24)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月24日(2011.2.24)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]