
深さ調整および接触力制御を備えた単回穿刺ランス固定具
ランセットの長手方向軸にほぼ平行方向に可動である穿刺端を有するランセットで皮膚に穿刺するためのランス機構固定具であって、順方向ストロークの際、穿刺端が第1の位置から第2の位置へと可動であり、戻りストロークの際、穿刺端が第2の位置から第1の位置へと可動である。ランセットの動きは、スロットカムおよびランセットに連結されたカムフォロアを含むカム機構によって制御される。駆動部材によってスロットカムに線形の力が加えられ、その線形動作およびスロットパスの形状によってランセットが第1の位置から第2の位置へと動き、かつ第1の位置へと戻る。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は一般に血液監視デバイスに関し、より詳細には、分析用の血液試料を採取するようにユーザの皮膚を穿刺するためのランス機構に関する。
【背景技術】
【0002】
多くの場合、血液試料を迅速に採取し、血液試料の分析を実施することが必要である。血液の採取は可能な限り無痛であることが好ましい。血液試料を無痛で採取する必要性の一例は血糖監視システムに関連したものであり、ユーザは自分の血糖値を監視するためにシステムを頻繁に使用しなければならない。
【0003】
血糖濃度が不規則な人は、血糖濃度を自己監視する。不規則な血糖濃度は、糖尿病などの疾患を含む様々な理由によってもたらされることがある。血糖濃度を監視する目的は、血糖濃度を測定し、値が高すぎるまたは低すぎる場合は、是正措置を講じて値を正常範囲内に回復することである。是正措置を講じないと重大な合併症を引き起こすことがある。血糖値が低下しすぎる低血糖症として知られる状態になると、神経が過敏になり、具合が悪くなり、混乱を生じ、それにより失神することもある。また、血糖値が高すぎる高血糖症として知られる状態になると、深刻な病気になる場合がある。低血糖症と高血糖症のどちらの状態も、生命を脅かす緊急事態となる可能性がある。
【0004】
血糖値を監視する1つの方法は、携帯型の手持ち式血糖検査デバイスを使用することである。これらのデバイスは携帯型であることから、ユーザはどこにいても血糖値を簡便に検査することができる。血糖値を調べるために、ランスデバイスを使用して血液滴を指先から採取する。ランスデバイスは皮膚を穿刺するランセットを含む。指先上で必要量の血液を出した後、血糖検査デバイスを使用して血液を採取し、血糖値を測定する。
【0005】
ランス機構の分野での顕著な進歩にもかかわらず、穿刺深さの変動は依然として問題となっている。多くの従来技術のランスデバイスは、実際のランセットに連結されたばねを使用してランセットを穿刺深さへと動かす。ランセットを引き戻すとばねが圧縮される。ばねは解除されると伸長し、それによりランセットが穿刺深さに順方向に推進される。従来技術のランスデバイスに伴う1つの問題は、ランセットの穿刺深さが、ばねの硬度を示すばね定数に依存することである。硬度を含むばねの機械的性質は、使用時間の経過とともに劣化する傾向にある。また、ばねの取付部は過剰な負荷がかかると「クリープ」または変形を生じやすい。したがって、多くの従来技術のランスの穿刺深さは時間の経過とともに減少することがある。ランセットの穿刺深さが時間の経過とともに減少すると、ランセットは、適切な血糖分析に必要である血液の必要量を抽出するのに十分な深さの切創を形成しない場合がある。ランスが分析に必要な量または容量の血液を採取されていないことにユーザが気付かない場合、不十分なランスによって誤った分析が行われることがある。あるいは、不十分なランスが行われたことにユーザが気付いた場合、ユーザは再度ランスを行う必要があり、ユーザの皮膚に別の切創が形成され、より多くの痛みが生じる。ユーザは、時間の経過とともに劣化したランセットを、最終的に交換しなければならない。
【0006】
多くの従来技術のランスデバイスに関連する同様の問題は、ばねによってランセットを穿刺深さまで順方向に進めるとき、ばねが静止長さを過ぎて伸長することである。これが起きると、次いでばねはランセットを引き戻す。しかし、ばねの振動性により、ランセットはその静止長さを過ぎて引き戻される。したがってランセットは振動を続け、それによりランセットの穿刺端がユーザの皮膚に切創を数回形成することになる。言い換えると、ばね定数依存性のデバイスを作動するたびにユーザの皮膚は数回ランスされ、結果としてより大きい切創が形成される。ユーザの皮膚により大きい切創が形成されると、そのことによってユーザにより多くの痛みがもたらされ、切創が治癒するまでの時間がより長くなる。この振動効果を軽減するために、いくつかの従来技術デバイスではダンパおよび内部ストッパの使用を採用してきた。しかし、これらの機能の性能は部品の公差など様々な要因によって予測不可能である。
【0007】
多くの従来技術のランスデバイスに関連する別の問題は、ユーザがランセットの針先端と皮膚の間の隙間を精密に調整することによって穿刺深さを精密に制御することができないことである。調整可能なエンドキャップを使用して皮膚とランセット針先端の間の距離を変える従来技術のデバイスもあるが、(a)使い捨てのランセット針の長さが様々である、(b)不透明なエンドキャップの使用によってユーザが皮膚と針先端の間の距離を目視確認することができない、という理由により、穿刺深さは不安定なままとなることがある。この穿刺深さの問題をさらに構成しているのは、皮膚が弾性であることから、エンドキャップにかかる力の変動によって、エンドキャップの穴の大きさに関連して皮膚の伸びまたは膨らみの程度が様々であり、皮膚とランセットの針先端の間の隙間が変化することである。エンドキャップにかかる力の大きさを制御する、従来技術のランスデバイスはない。
【発明の開示】
【発明が解決しようとする課題】
【0008】
したがって、ランセットを既知の距離だけ精密に動かし、穿刺深さを目視調整することができ、接触力を制御する、ランス機構が必要とされている。
【課題を解決するための手段】
【0009】
皮膚を穿刺するためのランス機構が提供される。ランス機構は、皮膚を穿刺するようになされた穿刺端を有するランセットを含む。ランセットの穿刺端は、順方向ストロークの際、第1の位置から第2の位置へ可動であり、戻りストロークの際、第2の位置から第1の位置へと可動である。
【0010】
ランセットの動作は、スロットカムおよびカムフォロアを含むカム機構によって制御される。ランセットは、可動のスロットカムに係合するカムフォロアに連結される。駆動部材によってスロットカムに線形の力が加えられ、その線形動作およびスロットパス形状によってランセットは第1の位置から第2の位置へと動き、かつ第1の位置へと戻る。
【発明を実施するための最良の形態】
【0011】
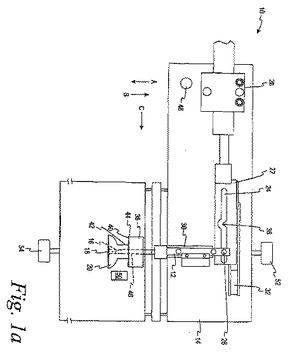
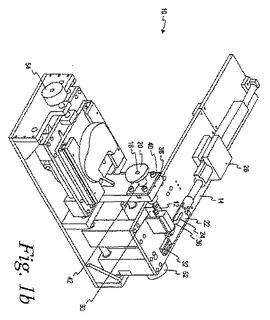
図1aおよび1bを参照すると、本発明のランス機構10が詳細に説明されている。ランス機構10は固定具14上のランセット12を含む。ランセット12は、皮膚を穿刺して分析用の血液滴を採取するようになされた鋭利な穿刺端16を有する。血液試料を採取するために、ランセット12の穿刺端16は、エンドキャップ20に形成された穴18を通り、患者の皮膚を穿刺するように突き出る。ユーザの皮膚に初期切創を形成した後、ランセット12はエンドキャップ20の穴18を通って元に戻る。
【0012】
ランス機構10は好ましくは、より大きな切創を形成することになる振動を起こさずに、ランセット12を起動する。ストロークの際、ランセット12の穿刺端16は、スロットカム22の動作によってエンドキャップ20を通って穿刺深さに到達し、かつ元に戻るように導かれる。この実施形態のスロットカム22には、全体的にV字形またはU字形または湾曲したスロットパス24が形成されており、ランセット12に取り付けられたカムフォロア26にスロットパス24をたどらせる。ランセット12はストロークの際、スロットカム22に係合したカムフォロア26とともに既知の距離を動く。ストローク距離は、ばね定数およびばねの静止長さを越えるばねの伸長によってではなく、スロットカム22のスロットパス24によって規定される。
【0013】
この実施形態では、ランセット12の穿刺端16をユーザの皮膚を通して所望の穿刺深さへと動かすのに必要な力が、リニアモータ28によって提供される。リニアモータ28は、スロットカム22をその長手方向軸に平行な方向に動かす。スロットカム22の線形動作によって、ランセット12に取り付けられたカムフォロア26がスロットパス24に沿って導かれ、取り付けられたランセット12をスロットカム22の方向にほぼ垂直な方向に動かす。リニアモータ28はトリガ48によって作動させることができる。作動すると、トリガによってリニアモータ28が駆動され、それによりスロットカム22が移動しランス機構10が起動することになる。
【0014】
本発明の代替実施形態では、リニアモータ28はばね駆動機構に置き換えることができる。この代替実施形態では、スロットカム22に連結された圧縮されたばねが伸長することにより、スロットカム22を線形方向に動かすのに必要な力がもたらされ、ランス機構10が起動する。
【0015】
起動前位置(図1a)に配置されたランセット12は、ストロークの際、ランセット12およびカムフォロア26が配置されているスロットパス24上の位置に応じて矢印Aおよび矢印Bで示す方向に可動である。固定具14はランセット12の動作を拘束する第1の溝30を含む。第1の溝30はランセット12の長手方向軸にほぼ平行である。
【0016】
図1aおよび1bをさらに参照すると、固定具14はスロットカム22の動作を拘束する第2の溝32も含む。スロットカム22および第2の溝32は、ランセット12に対してほぼ垂直に固定具14上に配設されている。スロットカム22は起動前位置(図1a)から起動後位置(図3a)へ、矢印Cで示す方向に動く。スロットカム22が起動前位置から起動後位置へと動くことによって、ランセット12は第1の位置から第2の位置へ、かつ再び第1の位置へと動く。スロットカム22は、スロットパス24に配設された全体的にV字形またはU字形の湾曲36を有する。スロットパス24の形状とスロットカム22の線形動作の組み合わせによって、ランセット12はエンドキャップ20の方に向かい、かつスロットカム22の移動方向に対して垂直な方向へと導かれる。
【0017】
固定具14はエンドキャップ取付板38を含む。エンドキャップ取付板38は、ランセットがエンドキャップ取付板38に形成された穴46を通過するように配置されている。環状ロードセル40が、エンドキャップ取付板38の裏面44上に取り付けられている。エンドキャップ20の基部42が、環状ロードセル40上に取り付けられている。エンドキャップ20および環状ロードセル40はランセット12の移動軸に沿って配置されており、ストロークの際、ランセット12の穿刺端16はエンドキャップ20に形成された穴18を通って突き出る。環状ロードセル40は、エンドキャップ20に力がかかるとき、エンドキャップ20から環状ロードセル40にかかる力を電子的に記録し、所定の力がかかるとリニアモータ28を駆動させる。
【0018】
本発明の代替実施形態では、力を記録する電子的環状ロードセル40は、機械的ばね式機構に置き換えることができる。このばね式機構は、ばねが圧縮された距離をもとにしてエンドキャップ20にかかる力の大きさを測定するように、あらかじめ設定された硬度を備えたばねを含む。所定の距離だけ圧縮されると、ばね式機構はリニアモータ28を作動させる。
【0019】
固定具14は、(a)エンドキャップ20内部で起きる事象を観察および記録し、(b)皮膚表面と穿刺端16の間の隙間を確認することによってランセット12の穿刺深さを測定し調整しやすくする、高速ビデオシステム50を含む。ビデオシステム50は、ランセット12の穿刺端16がエンドキャップ20の穴18を通過し皮膚表面へと入ることを観察するように、エンドキャップ20に隣接して配置される。エンドキャップ20を透明とし、および/またはエンドキャップ20にスロットまたは窓を形成し、それを通してビデオシステムがエンドキャップ20内部で起きる事象を観察できることが、企図されている。
【0020】
代替実施形態では、高速ビデオシステム50を観察レンズおよび適切な測定マークを備えたエンドキャップに置き換えることができる。この代替実施形態では、ユーザは皮膚表面と穿刺部の間の隙間を観察レンズを通して物理的に観察し確認し、ランセット12の穿刺深さを所望通りに調整することができる。
【0021】
ここで図1bを参照すると、固定具14は穿刺端調整機構52を含む。穿刺端調整機構52は、ランセット12が上に配設された固定具14の一部をランセットの移動軸に平行に動かす、ねじ切りされたノブアセンブリを含むことが企図されている。穿刺端調整機構52によって、エンドキャップ20内での皮膚表面に対する穿刺端16の位置を調整することができる。固定具14は、エンドキャップ調整機構54を含むこともできる。エンドキャップ調整部材54は、エンドキャップ取付板38を含む固定具14の一部をランセット12の移動軸に平行に動かす、ねじ切りされたノブアセンブリを含むことが企図されている。エンドキャップ調整機構54によって、穿刺端16の位置に対するエンドキャップ20の位置を調整することができる。
【0022】
代替実施形態では、エンドキャップ調整機構54およびねじ切りされたノブアセンブリを、穿刺端16と皮膚表面の間の隙間を調整するための機構を含む、調整可能なエンドキャップの使用に置き換えることができる。このような調整可能なエンドキャップの例は、米国特許第5,916,230号に記載されており、参照によってこれを本明細書に援用する。
【0023】
ランス機構の動作を、図1aおよび1bの参照から始めて、以下に述べる。ユーザの皮膚をランスするために、ユーザはランセット移動軸に沿ってエンドキャップ20に皮膚を押し付ける。一般に、皮膚はユーザの指または手の皮膚である。ただし、代替部位を使用できることも企図されている。図1aおよび1bでは、ランス機構10はランセット12が第1の位置にある起動前位置で示されている。ユーザがエンドキャップ20に力を加えると、環状ロードセル40がかかった力の大きさを測定し記録する。ユーザは、所定の大きさの力が達成され環状ロードセル40によって記録されるまで、エンドキャップ20に力を加え続ける。
【0024】
本発明の一実施形態では、所定の(閾値の)大きさの力が達成されると、指示ランプ(図示せず)が点灯し、所望の圧力が加えられていることをユーザに知らせる。本発明の別の実施形態では、可視の力測定器(図示せず)が、エンドキャップ20に加えられている力の大きさをユーザに表示する。所定の大きさの力をエンドキャップ20に対して維持しながら、ユーザはエンドキャップ20に形成された穴18内の皮膚表面とランセット12の穿刺端16の間の隙間を調整して、精密な穿刺深さに設定する。ランセット調整部材52およびエンドキャップ調整部材54を使用して、穿刺深さの調整が達成される。皮膚表面に対する、ランセット12の穿刺端16の起動前位置は、矢印Aおよび矢印Bで示す双方向に動かすことができる。ランセット12の穿刺端16に対する、エンドキャップ20の起動前位置は、矢印Aおよび矢印Bで示す双方向に動かすこともできる。
【0025】
高速ビデオで制御された深さ調整システム50を使用することによって、例えば、穿刺端16および皮膚表面位置に対する精密な調整を制御することができる。高速ビデオシステム50はエンドキャップ20内部の画像をユーザに示す。皮膚表面と穿刺端16の間の隙間の確認および精密な調整を容易にするために、ビデオシステム50は、あらかじめ測定された測定値マークをエンドキャップ20内部の画像に重ね合わせる。代替実施形態では、透明なエンドキャップの上または近くで視認することのできる測定マーク、または不透明なエンドキャップ内で観察レンズを使用することによって、穿刺端16および皮膚表面の位置を確認することができる。
【0026】
所定の力をエンドキャップ20に加えながら皮膚表面と穿刺端16の間の隙間を調整した後、ユーザはランス機構トリガ48を準備する。準備後、トリガ48は作動されるとリニアモータ28を駆動し、それによりランス機構10が起動する。したがって、一実施形態では、(a)ランス機構が準備され、(b)穿刺深さを設定するために使用されるエンドキャップ20にユーザが所定の大きさの力を加えたとき、ランセットが起動する。適正な大きさの力が加えられると、次いでリニアモータ28が駆動し、ランス機構10が起動することになる。
【0027】
リニアモータ28は駆動すると、図1aの矢印Cで示す方向にスロットカム22を迅速に加速する。スロットカム22の矢印C方向への線形動作によって、カムフォロア26がスロットパス24に沿って導かれる。その後、スロットパス24のV字またはU字形状36に沿って、スロットカム22が線形動作することによって、カムフォロア26に取り付けられたランセット12が矢印Aで示す線形方向に移動する(順方向ストローク)。
【0028】
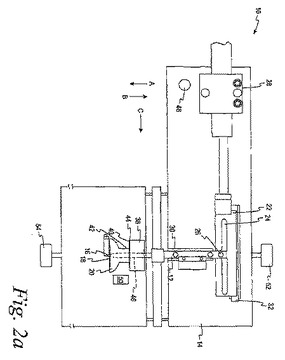
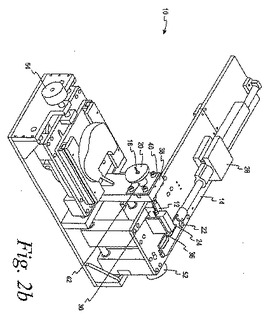
ここで図2aおよび2bを参照すると、スロットパス24のV字またはU字形状36によって、カムフォロア26および取り付けられたランセット12がスロットパス24のV字またはU字形状36の底部へと導かれるように、リニアモータ28はスロットカム22をそれが移動できる距離のほぼ半分だけ動かす。この第2の位置にあるとき、穿刺端16はエンドキャップ20に形成された穴18を越えて突き出るのに十分な距離である穿刺深さと等しい距離dをすでに移動している。距離dは、スロットパス24の大きさおよび形状、ならびに皮膚表面と穿刺端の間の起動前の隙間に依存する。図2aおよび2bに示すように、ランセット12は、取り付けられたカムフォロア26がスロットパス24のV字またはU字形状36の底部に到達するとき、矢印Aで示す方向への動作を停止する。
【0029】
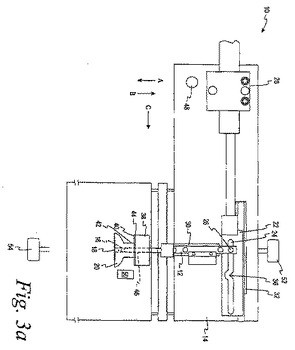
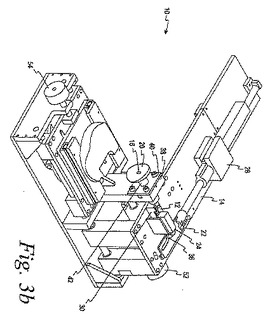
ここで図3aおよび3bを参照すると、リニアモータ28によってスロットカム22は、リニアモータおよび第2の溝によって可能になる距離全体(または全ストローク)を動く。スロットカム22が矢印Cの方向に移動し続けると、スロットパス24は係合したカムフォロア26およびランセットを、スロットパス24のV字またはU字形状36に沿って導き続ける。上述したようにカムフォロア26がスロットパス24のV字またはU字形状36の底部に到達した後(図2a、2b)、カムフォロア26は矢印Aで示す方向にそれ以上強制されない。スロットカム22が矢印Cの方向に線形動作を続けることによって、カムフォロア26に取り付けられたランセット12がスロットパス24をたどり、それによりランスが図3aおよび3bに示す位置へと矢印Bで示す方向に移動する(戻りストローク)。図3aおよび3bに示す位置にあるとき、穿刺端16は皮膚から離れて引き戻され、エンドキャップ20に形成された穴18を通って順方向ストロークの際に移動した距離と等しい距離だけ戻る。穿刺端16はランス機構10が起動される前と同じ(第1の)位置へと戻る(戻りストローク)。したがって、ランス機構10の起動によって、ランス12は1回だけ順方向ストロークおよび戻りストロークを行うことになる。ランセット12の線形動作はスロットパス24の一定の形状によって拘束されることから、ランス12は振動せず、ランセット12および穿刺端16が矢印Aの方向にさらに動くことを防ぐ。スロットカム22を使用することによって、ランセットの移動距離はランス機構10の寿命にわたって一定のままとなり、それによりユーザは穿刺深さを一定かつ精密に設定することができる。
【0030】
本発明では、ランセット12の順方向ストロークは、スロットカム22のスロットパス24の大きさおよび形状ならびに皮膚表面と穿刺端16の間の隙間に依存する。ランセット12の一定の移動距離を変更するように、スロットパス24の形状を変化させることができることが、企図されている。ランセット12の一定の移動速度を変更するように、スロットパス24の形状を変化させることができることも、さらに企図されている。
実施形態A
皮膚を穿刺するためのランス機構固定具であって、
皮膚を穿刺するようになされた穿刺端を有し、穿刺端がランセットの長手方向軸にほぼ平行な方向に可動であり、ランセットの穿刺端が順方向ストロークの際、第1の位置から第2の位置へと可動であり、ランセットの穿刺端が戻りストロークの際、第2の位置から第1の位置へと可動である、固定具上に配設されたランセットと、
スロットカムおよびカムフォロアを含み、カムフォロアがランセットに連結されており、スロットカムの長手方向軸がランセットの長手方向軸にほぼ垂直になるようにカムフォロアがスロットカムに係合しており、カムフォロアおよび連結されたランセットを一定の距離だけ動かすようにスロットカムがその長手方向軸に沿って可動であるカム機構と、
スロットカムに連結され、スロットカムを動かすことを補助するようになされた駆動部材とを含む、ランス機構固定具。
実施形態B
ランセットの移動軸に沿って位置するエンドキャップをさらに含み、エンドキャップが皮膚表面を穿刺端からある距離に配置し、エンドキャップが穿刺端が皮膚表面を穿刺するときに通過する穴を含む、実施形態Aのランス機構。
実施形態C
エンドキャップにかかる力の大きさを記録する、エンドキャップに連結された力記録部材をさらに含む、実施形態Bのランス機構。
実施形態D
力記録部材が環状ロードセルである、実施形態Cのランス機構。
実施形態E
力記録部材がばね式機構である、実施形態Cのランス機構。
実施形態F
所定の大きさの力がエンドキャップにかかると力記録部材が駆動部材を作動する、実施形態Cのランス機構。
実施形態G
ランセットの穿刺深さを調整するための穿刺端調整機構およびエンドキャップ調整機構をさらに含む、実施形態Bのランス機構。
実施形態H
高速ビデオシステムをさらに含む、実施形態Gのランス機構。
実施形態I
エンドキャップがほぼ透明で測定マークを備えている、実施形態Gのランス機構。
実施形態J
エンドキャップが観察レンズおよび測定マークを含む、実施形態Gのランス機構。
実施形態K
駆動部材がリニア誘導モータである、実施形態Aのランス機構。
実施形態L
駆動部材がばね駆動機構である、実施形態Aのランス機構。
実施形態M
スロットカムの長手方向軸がランセットの長手方向軸にほぼ垂直である、実施形態Aのランス機構。
実施形態N
スロットカムの長手方向軸がランセットの長手方向軸に垂直である、実施形態Mのランス機構。
実施形態O
皮膚を穿刺するためのランス機構固定具であって、
皮膚を穿刺するようになされた穿刺端を有し、穿刺端がランセットの長手方向軸にほぼ平行な方向に可動であり、ランセットの穿刺端が順方向ストロークの際、第1の位置から第2の位置へと可動であり、ランセットの穿刺端が戻りストロークの際、第2の位置から第1の位置へと可動である、固定具上に配設されたランセットと、
スロットカムおよびカムフォロアを含み、カムフォロアがランセットに連結されており、スロットカムの長手方向軸がランセットの長手方向軸にほぼ垂直になるようにカムフォロアがスロットカムに係合しており、カムフォロアおよび連結されたランセットを一定の距離だけ動かすようにスロットカムがその長手方向軸に沿って可動であるカム機構と、
スロットカムに連結され、スロットカムを動かすことを補助するようになされた駆動部材と、
ランセットの移動軸に沿って位置し、皮膚表面を穿刺端からある距離に配置し、穿刺端が皮膚表面を穿刺するときに通過する穴を含むエンドキャップとを含む、ランス機構固定具。
実施形態P
エンドキャップにかかる力の大きさを記録する、エンドキャップに連結された力記録部材をさらに含む、実施形態Oのランス機構。
実施形態Q
力記録部材が環状ロードセルである、実施形態Pのランス機構。
実施形態R
力記録部材がばね式機構である、実施形態Pのランス機構。
実施形態S
所定の大きさの力がエンドキャップにかかると力記録部材が駆動部材を作動する、実施形態Pのランス機構。
実施形態T
ランセットの穿刺深さを調整するための穿刺端調整機構およびエンドキャップ調整機構をさらに含む、実施形態Oのランス機構。
実施形態U
高速ビデオシステムをさらに含む、実施形態Tのランス機構。
実施形態V
エンドキャップがほぼ透明で測定マークを備えている、実施形態Tのランス機構。
実施形態W
エンドキャップが観察レンズおよび測定マークを含む、実施形態Tのランス機構。
実施形態X
駆動部材がリニア誘導モータを含む、実施形態Oのランス機構。
実施形態Y
駆動部材がばね駆動機構を含む、実施形態Oのランス機構。
実施形態Z
スロットカムの長手方向軸がランセットの長手方向軸に垂直である、実施形態Oのランス機構。
実施形態AA
皮膚を穿刺するためのランス機構固定具であって、
皮膚を穿刺するようになされた穿刺端を有し、穿刺端がランセットの長手方向軸にほぼ平行な方向に可動であり、ランセットの穿刺端が順方向ストロークの際、第1の位置から第2の位置へと可動であり、ランセットの穿刺端が戻りストロークの際、第2の位置から第1の位置へと可動である、固定具上に配設されたランセットと、
スロットカムおよびカムフォロアを含み、カムフォロアがランセットに連結されており、スロットカムの長手方向軸がランセットの長手方向軸にほぼ垂直になるようにカムフォロアがスロットカムに係合しており、カムフォロアおよび連結されたランセットを一定の距離だけ動かすようにスロットカムがその長手方向軸に沿って可動であるカム機構と、
スロットカムに連結され、スロットカムを一定距離だけ動かすことを補助するようになされたばねデバイスと、
ランセットの移動軸に沿って位置し、皮膚表面を穿刺端からある距離に配置し、穿刺端が皮膚を穿刺するときに通過する穴を含むエンドキャップと、
エンドキャップにかかる力の大きさを記録し、所定の大きさの力がエンドキャップにかかると駆動部材を作動する、エンドキャップに連結された力記録部材と、
ランセットの穿刺端の穿刺深さを調整するための穿刺端調整機構およびエンドキャップ調整機構とを含む、ランス機構固定具。
方法BB
ランス機構を使用して血液試料を採取するように皮膚を穿刺するための方法であって、ランス機構がスロットカム、ランセット、エンドキャップ、駆動部材、トリガを含み、
力記録部材に連結されたエンドキャップにユーザの皮膚を押し付ける動作と、
エンドキャップに加えられた力を測定する動作と、
所定の大きさの力がエンドキャップにかかると駆動部材を作動する動作とを含み、駆動部材がスロットカムを線形方向に動かし、スロットカムの線形動作がランセットを第1の位置から第2の位置へ、かつ第1の位置へと戻るように動かし、それによりユーザの皮膚に単回穿刺が行われる方法。
方法CC
皮膚表面と穿刺端の間の所望の隙間を確保するように、穿刺端およびエンドキャップの位置を調整する動作をさらに含む、方法BBの方法。
【0031】
本発明は様々な修正および代替形態を受け入れる余地があるが、特定の実施形態を図面において例を使用して示し、詳細に説明した。ただし、これは本発明を開示された特定の形態に制限するものではなく、反対に、添付の特許請求の範囲に規定される本発明の精神および範囲内に含まれるあらゆる修正、等価物、代替を包含するものである。
【図面の簡単な説明】
【0032】
【図1a】本発明の一実施形態による、ランス前位置で示すランス機構の上面図である。
【図1b】本発明の一実施形態による、ランス前位置で示すランス機構の斜視図である。
【図2a】本発明の一実施形態による、おおよそのストローク中の位置で示すランス機構の上面図である。
【図2b】本発明の一実施形態による、おおよそのストローク中の位置で示すランス機構の斜視図である。
【図3a】本発明の一実施形態による、ランス後位置で示すランス機構の上面図である。
【図3b】本発明の一実施形態による、ランス後位置で示すランス機構の斜視図である。
【技術分野】
【0001】
本発明は一般に血液監視デバイスに関し、より詳細には、分析用の血液試料を採取するようにユーザの皮膚を穿刺するためのランス機構に関する。
【背景技術】
【0002】
多くの場合、血液試料を迅速に採取し、血液試料の分析を実施することが必要である。血液の採取は可能な限り無痛であることが好ましい。血液試料を無痛で採取する必要性の一例は血糖監視システムに関連したものであり、ユーザは自分の血糖値を監視するためにシステムを頻繁に使用しなければならない。
【0003】
血糖濃度が不規則な人は、血糖濃度を自己監視する。不規則な血糖濃度は、糖尿病などの疾患を含む様々な理由によってもたらされることがある。血糖濃度を監視する目的は、血糖濃度を測定し、値が高すぎるまたは低すぎる場合は、是正措置を講じて値を正常範囲内に回復することである。是正措置を講じないと重大な合併症を引き起こすことがある。血糖値が低下しすぎる低血糖症として知られる状態になると、神経が過敏になり、具合が悪くなり、混乱を生じ、それにより失神することもある。また、血糖値が高すぎる高血糖症として知られる状態になると、深刻な病気になる場合がある。低血糖症と高血糖症のどちらの状態も、生命を脅かす緊急事態となる可能性がある。
【0004】
血糖値を監視する1つの方法は、携帯型の手持ち式血糖検査デバイスを使用することである。これらのデバイスは携帯型であることから、ユーザはどこにいても血糖値を簡便に検査することができる。血糖値を調べるために、ランスデバイスを使用して血液滴を指先から採取する。ランスデバイスは皮膚を穿刺するランセットを含む。指先上で必要量の血液を出した後、血糖検査デバイスを使用して血液を採取し、血糖値を測定する。
【0005】
ランス機構の分野での顕著な進歩にもかかわらず、穿刺深さの変動は依然として問題となっている。多くの従来技術のランスデバイスは、実際のランセットに連結されたばねを使用してランセットを穿刺深さへと動かす。ランセットを引き戻すとばねが圧縮される。ばねは解除されると伸長し、それによりランセットが穿刺深さに順方向に推進される。従来技術のランスデバイスに伴う1つの問題は、ランセットの穿刺深さが、ばねの硬度を示すばね定数に依存することである。硬度を含むばねの機械的性質は、使用時間の経過とともに劣化する傾向にある。また、ばねの取付部は過剰な負荷がかかると「クリープ」または変形を生じやすい。したがって、多くの従来技術のランスの穿刺深さは時間の経過とともに減少することがある。ランセットの穿刺深さが時間の経過とともに減少すると、ランセットは、適切な血糖分析に必要である血液の必要量を抽出するのに十分な深さの切創を形成しない場合がある。ランスが分析に必要な量または容量の血液を採取されていないことにユーザが気付かない場合、不十分なランスによって誤った分析が行われることがある。あるいは、不十分なランスが行われたことにユーザが気付いた場合、ユーザは再度ランスを行う必要があり、ユーザの皮膚に別の切創が形成され、より多くの痛みが生じる。ユーザは、時間の経過とともに劣化したランセットを、最終的に交換しなければならない。
【0006】
多くの従来技術のランスデバイスに関連する同様の問題は、ばねによってランセットを穿刺深さまで順方向に進めるとき、ばねが静止長さを過ぎて伸長することである。これが起きると、次いでばねはランセットを引き戻す。しかし、ばねの振動性により、ランセットはその静止長さを過ぎて引き戻される。したがってランセットは振動を続け、それによりランセットの穿刺端がユーザの皮膚に切創を数回形成することになる。言い換えると、ばね定数依存性のデバイスを作動するたびにユーザの皮膚は数回ランスされ、結果としてより大きい切創が形成される。ユーザの皮膚により大きい切創が形成されると、そのことによってユーザにより多くの痛みがもたらされ、切創が治癒するまでの時間がより長くなる。この振動効果を軽減するために、いくつかの従来技術デバイスではダンパおよび内部ストッパの使用を採用してきた。しかし、これらの機能の性能は部品の公差など様々な要因によって予測不可能である。
【0007】
多くの従来技術のランスデバイスに関連する別の問題は、ユーザがランセットの針先端と皮膚の間の隙間を精密に調整することによって穿刺深さを精密に制御することができないことである。調整可能なエンドキャップを使用して皮膚とランセット針先端の間の距離を変える従来技術のデバイスもあるが、(a)使い捨てのランセット針の長さが様々である、(b)不透明なエンドキャップの使用によってユーザが皮膚と針先端の間の距離を目視確認することができない、という理由により、穿刺深さは不安定なままとなることがある。この穿刺深さの問題をさらに構成しているのは、皮膚が弾性であることから、エンドキャップにかかる力の変動によって、エンドキャップの穴の大きさに関連して皮膚の伸びまたは膨らみの程度が様々であり、皮膚とランセットの針先端の間の隙間が変化することである。エンドキャップにかかる力の大きさを制御する、従来技術のランスデバイスはない。
【発明の開示】
【発明が解決しようとする課題】
【0008】
したがって、ランセットを既知の距離だけ精密に動かし、穿刺深さを目視調整することができ、接触力を制御する、ランス機構が必要とされている。
【課題を解決するための手段】
【0009】
皮膚を穿刺するためのランス機構が提供される。ランス機構は、皮膚を穿刺するようになされた穿刺端を有するランセットを含む。ランセットの穿刺端は、順方向ストロークの際、第1の位置から第2の位置へ可動であり、戻りストロークの際、第2の位置から第1の位置へと可動である。
【0010】
ランセットの動作は、スロットカムおよびカムフォロアを含むカム機構によって制御される。ランセットは、可動のスロットカムに係合するカムフォロアに連結される。駆動部材によってスロットカムに線形の力が加えられ、その線形動作およびスロットパス形状によってランセットは第1の位置から第2の位置へと動き、かつ第1の位置へと戻る。
【発明を実施するための最良の形態】
【0011】
図1aおよび1bを参照すると、本発明のランス機構10が詳細に説明されている。ランス機構10は固定具14上のランセット12を含む。ランセット12は、皮膚を穿刺して分析用の血液滴を採取するようになされた鋭利な穿刺端16を有する。血液試料を採取するために、ランセット12の穿刺端16は、エンドキャップ20に形成された穴18を通り、患者の皮膚を穿刺するように突き出る。ユーザの皮膚に初期切創を形成した後、ランセット12はエンドキャップ20の穴18を通って元に戻る。
【0012】
ランス機構10は好ましくは、より大きな切創を形成することになる振動を起こさずに、ランセット12を起動する。ストロークの際、ランセット12の穿刺端16は、スロットカム22の動作によってエンドキャップ20を通って穿刺深さに到達し、かつ元に戻るように導かれる。この実施形態のスロットカム22には、全体的にV字形またはU字形または湾曲したスロットパス24が形成されており、ランセット12に取り付けられたカムフォロア26にスロットパス24をたどらせる。ランセット12はストロークの際、スロットカム22に係合したカムフォロア26とともに既知の距離を動く。ストローク距離は、ばね定数およびばねの静止長さを越えるばねの伸長によってではなく、スロットカム22のスロットパス24によって規定される。
【0013】
この実施形態では、ランセット12の穿刺端16をユーザの皮膚を通して所望の穿刺深さへと動かすのに必要な力が、リニアモータ28によって提供される。リニアモータ28は、スロットカム22をその長手方向軸に平行な方向に動かす。スロットカム22の線形動作によって、ランセット12に取り付けられたカムフォロア26がスロットパス24に沿って導かれ、取り付けられたランセット12をスロットカム22の方向にほぼ垂直な方向に動かす。リニアモータ28はトリガ48によって作動させることができる。作動すると、トリガによってリニアモータ28が駆動され、それによりスロットカム22が移動しランス機構10が起動することになる。
【0014】
本発明の代替実施形態では、リニアモータ28はばね駆動機構に置き換えることができる。この代替実施形態では、スロットカム22に連結された圧縮されたばねが伸長することにより、スロットカム22を線形方向に動かすのに必要な力がもたらされ、ランス機構10が起動する。
【0015】
起動前位置(図1a)に配置されたランセット12は、ストロークの際、ランセット12およびカムフォロア26が配置されているスロットパス24上の位置に応じて矢印Aおよび矢印Bで示す方向に可動である。固定具14はランセット12の動作を拘束する第1の溝30を含む。第1の溝30はランセット12の長手方向軸にほぼ平行である。
【0016】
図1aおよび1bをさらに参照すると、固定具14はスロットカム22の動作を拘束する第2の溝32も含む。スロットカム22および第2の溝32は、ランセット12に対してほぼ垂直に固定具14上に配設されている。スロットカム22は起動前位置(図1a)から起動後位置(図3a)へ、矢印Cで示す方向に動く。スロットカム22が起動前位置から起動後位置へと動くことによって、ランセット12は第1の位置から第2の位置へ、かつ再び第1の位置へと動く。スロットカム22は、スロットパス24に配設された全体的にV字形またはU字形の湾曲36を有する。スロットパス24の形状とスロットカム22の線形動作の組み合わせによって、ランセット12はエンドキャップ20の方に向かい、かつスロットカム22の移動方向に対して垂直な方向へと導かれる。
【0017】
固定具14はエンドキャップ取付板38を含む。エンドキャップ取付板38は、ランセットがエンドキャップ取付板38に形成された穴46を通過するように配置されている。環状ロードセル40が、エンドキャップ取付板38の裏面44上に取り付けられている。エンドキャップ20の基部42が、環状ロードセル40上に取り付けられている。エンドキャップ20および環状ロードセル40はランセット12の移動軸に沿って配置されており、ストロークの際、ランセット12の穿刺端16はエンドキャップ20に形成された穴18を通って突き出る。環状ロードセル40は、エンドキャップ20に力がかかるとき、エンドキャップ20から環状ロードセル40にかかる力を電子的に記録し、所定の力がかかるとリニアモータ28を駆動させる。
【0018】
本発明の代替実施形態では、力を記録する電子的環状ロードセル40は、機械的ばね式機構に置き換えることができる。このばね式機構は、ばねが圧縮された距離をもとにしてエンドキャップ20にかかる力の大きさを測定するように、あらかじめ設定された硬度を備えたばねを含む。所定の距離だけ圧縮されると、ばね式機構はリニアモータ28を作動させる。
【0019】
固定具14は、(a)エンドキャップ20内部で起きる事象を観察および記録し、(b)皮膚表面と穿刺端16の間の隙間を確認することによってランセット12の穿刺深さを測定し調整しやすくする、高速ビデオシステム50を含む。ビデオシステム50は、ランセット12の穿刺端16がエンドキャップ20の穴18を通過し皮膚表面へと入ることを観察するように、エンドキャップ20に隣接して配置される。エンドキャップ20を透明とし、および/またはエンドキャップ20にスロットまたは窓を形成し、それを通してビデオシステムがエンドキャップ20内部で起きる事象を観察できることが、企図されている。
【0020】
代替実施形態では、高速ビデオシステム50を観察レンズおよび適切な測定マークを備えたエンドキャップに置き換えることができる。この代替実施形態では、ユーザは皮膚表面と穿刺部の間の隙間を観察レンズを通して物理的に観察し確認し、ランセット12の穿刺深さを所望通りに調整することができる。
【0021】
ここで図1bを参照すると、固定具14は穿刺端調整機構52を含む。穿刺端調整機構52は、ランセット12が上に配設された固定具14の一部をランセットの移動軸に平行に動かす、ねじ切りされたノブアセンブリを含むことが企図されている。穿刺端調整機構52によって、エンドキャップ20内での皮膚表面に対する穿刺端16の位置を調整することができる。固定具14は、エンドキャップ調整機構54を含むこともできる。エンドキャップ調整部材54は、エンドキャップ取付板38を含む固定具14の一部をランセット12の移動軸に平行に動かす、ねじ切りされたノブアセンブリを含むことが企図されている。エンドキャップ調整機構54によって、穿刺端16の位置に対するエンドキャップ20の位置を調整することができる。
【0022】
代替実施形態では、エンドキャップ調整機構54およびねじ切りされたノブアセンブリを、穿刺端16と皮膚表面の間の隙間を調整するための機構を含む、調整可能なエンドキャップの使用に置き換えることができる。このような調整可能なエンドキャップの例は、米国特許第5,916,230号に記載されており、参照によってこれを本明細書に援用する。
【0023】
ランス機構の動作を、図1aおよび1bの参照から始めて、以下に述べる。ユーザの皮膚をランスするために、ユーザはランセット移動軸に沿ってエンドキャップ20に皮膚を押し付ける。一般に、皮膚はユーザの指または手の皮膚である。ただし、代替部位を使用できることも企図されている。図1aおよび1bでは、ランス機構10はランセット12が第1の位置にある起動前位置で示されている。ユーザがエンドキャップ20に力を加えると、環状ロードセル40がかかった力の大きさを測定し記録する。ユーザは、所定の大きさの力が達成され環状ロードセル40によって記録されるまで、エンドキャップ20に力を加え続ける。
【0024】
本発明の一実施形態では、所定の(閾値の)大きさの力が達成されると、指示ランプ(図示せず)が点灯し、所望の圧力が加えられていることをユーザに知らせる。本発明の別の実施形態では、可視の力測定器(図示せず)が、エンドキャップ20に加えられている力の大きさをユーザに表示する。所定の大きさの力をエンドキャップ20に対して維持しながら、ユーザはエンドキャップ20に形成された穴18内の皮膚表面とランセット12の穿刺端16の間の隙間を調整して、精密な穿刺深さに設定する。ランセット調整部材52およびエンドキャップ調整部材54を使用して、穿刺深さの調整が達成される。皮膚表面に対する、ランセット12の穿刺端16の起動前位置は、矢印Aおよび矢印Bで示す双方向に動かすことができる。ランセット12の穿刺端16に対する、エンドキャップ20の起動前位置は、矢印Aおよび矢印Bで示す双方向に動かすこともできる。
【0025】
高速ビデオで制御された深さ調整システム50を使用することによって、例えば、穿刺端16および皮膚表面位置に対する精密な調整を制御することができる。高速ビデオシステム50はエンドキャップ20内部の画像をユーザに示す。皮膚表面と穿刺端16の間の隙間の確認および精密な調整を容易にするために、ビデオシステム50は、あらかじめ測定された測定値マークをエンドキャップ20内部の画像に重ね合わせる。代替実施形態では、透明なエンドキャップの上または近くで視認することのできる測定マーク、または不透明なエンドキャップ内で観察レンズを使用することによって、穿刺端16および皮膚表面の位置を確認することができる。
【0026】
所定の力をエンドキャップ20に加えながら皮膚表面と穿刺端16の間の隙間を調整した後、ユーザはランス機構トリガ48を準備する。準備後、トリガ48は作動されるとリニアモータ28を駆動し、それによりランス機構10が起動する。したがって、一実施形態では、(a)ランス機構が準備され、(b)穿刺深さを設定するために使用されるエンドキャップ20にユーザが所定の大きさの力を加えたとき、ランセットが起動する。適正な大きさの力が加えられると、次いでリニアモータ28が駆動し、ランス機構10が起動することになる。
【0027】
リニアモータ28は駆動すると、図1aの矢印Cで示す方向にスロットカム22を迅速に加速する。スロットカム22の矢印C方向への線形動作によって、カムフォロア26がスロットパス24に沿って導かれる。その後、スロットパス24のV字またはU字形状36に沿って、スロットカム22が線形動作することによって、カムフォロア26に取り付けられたランセット12が矢印Aで示す線形方向に移動する(順方向ストローク)。
【0028】
ここで図2aおよび2bを参照すると、スロットパス24のV字またはU字形状36によって、カムフォロア26および取り付けられたランセット12がスロットパス24のV字またはU字形状36の底部へと導かれるように、リニアモータ28はスロットカム22をそれが移動できる距離のほぼ半分だけ動かす。この第2の位置にあるとき、穿刺端16はエンドキャップ20に形成された穴18を越えて突き出るのに十分な距離である穿刺深さと等しい距離dをすでに移動している。距離dは、スロットパス24の大きさおよび形状、ならびに皮膚表面と穿刺端の間の起動前の隙間に依存する。図2aおよび2bに示すように、ランセット12は、取り付けられたカムフォロア26がスロットパス24のV字またはU字形状36の底部に到達するとき、矢印Aで示す方向への動作を停止する。
【0029】
ここで図3aおよび3bを参照すると、リニアモータ28によってスロットカム22は、リニアモータおよび第2の溝によって可能になる距離全体(または全ストローク)を動く。スロットカム22が矢印Cの方向に移動し続けると、スロットパス24は係合したカムフォロア26およびランセットを、スロットパス24のV字またはU字形状36に沿って導き続ける。上述したようにカムフォロア26がスロットパス24のV字またはU字形状36の底部に到達した後(図2a、2b)、カムフォロア26は矢印Aで示す方向にそれ以上強制されない。スロットカム22が矢印Cの方向に線形動作を続けることによって、カムフォロア26に取り付けられたランセット12がスロットパス24をたどり、それによりランスが図3aおよび3bに示す位置へと矢印Bで示す方向に移動する(戻りストローク)。図3aおよび3bに示す位置にあるとき、穿刺端16は皮膚から離れて引き戻され、エンドキャップ20に形成された穴18を通って順方向ストロークの際に移動した距離と等しい距離だけ戻る。穿刺端16はランス機構10が起動される前と同じ(第1の)位置へと戻る(戻りストローク)。したがって、ランス機構10の起動によって、ランス12は1回だけ順方向ストロークおよび戻りストロークを行うことになる。ランセット12の線形動作はスロットパス24の一定の形状によって拘束されることから、ランス12は振動せず、ランセット12および穿刺端16が矢印Aの方向にさらに動くことを防ぐ。スロットカム22を使用することによって、ランセットの移動距離はランス機構10の寿命にわたって一定のままとなり、それによりユーザは穿刺深さを一定かつ精密に設定することができる。
【0030】
本発明では、ランセット12の順方向ストロークは、スロットカム22のスロットパス24の大きさおよび形状ならびに皮膚表面と穿刺端16の間の隙間に依存する。ランセット12の一定の移動距離を変更するように、スロットパス24の形状を変化させることができることが、企図されている。ランセット12の一定の移動速度を変更するように、スロットパス24の形状を変化させることができることも、さらに企図されている。
実施形態A
皮膚を穿刺するためのランス機構固定具であって、
皮膚を穿刺するようになされた穿刺端を有し、穿刺端がランセットの長手方向軸にほぼ平行な方向に可動であり、ランセットの穿刺端が順方向ストロークの際、第1の位置から第2の位置へと可動であり、ランセットの穿刺端が戻りストロークの際、第2の位置から第1の位置へと可動である、固定具上に配設されたランセットと、
スロットカムおよびカムフォロアを含み、カムフォロアがランセットに連結されており、スロットカムの長手方向軸がランセットの長手方向軸にほぼ垂直になるようにカムフォロアがスロットカムに係合しており、カムフォロアおよび連結されたランセットを一定の距離だけ動かすようにスロットカムがその長手方向軸に沿って可動であるカム機構と、
スロットカムに連結され、スロットカムを動かすことを補助するようになされた駆動部材とを含む、ランス機構固定具。
実施形態B
ランセットの移動軸に沿って位置するエンドキャップをさらに含み、エンドキャップが皮膚表面を穿刺端からある距離に配置し、エンドキャップが穿刺端が皮膚表面を穿刺するときに通過する穴を含む、実施形態Aのランス機構。
実施形態C
エンドキャップにかかる力の大きさを記録する、エンドキャップに連結された力記録部材をさらに含む、実施形態Bのランス機構。
実施形態D
力記録部材が環状ロードセルである、実施形態Cのランス機構。
実施形態E
力記録部材がばね式機構である、実施形態Cのランス機構。
実施形態F
所定の大きさの力がエンドキャップにかかると力記録部材が駆動部材を作動する、実施形態Cのランス機構。
実施形態G
ランセットの穿刺深さを調整するための穿刺端調整機構およびエンドキャップ調整機構をさらに含む、実施形態Bのランス機構。
実施形態H
高速ビデオシステムをさらに含む、実施形態Gのランス機構。
実施形態I
エンドキャップがほぼ透明で測定マークを備えている、実施形態Gのランス機構。
実施形態J
エンドキャップが観察レンズおよび測定マークを含む、実施形態Gのランス機構。
実施形態K
駆動部材がリニア誘導モータである、実施形態Aのランス機構。
実施形態L
駆動部材がばね駆動機構である、実施形態Aのランス機構。
実施形態M
スロットカムの長手方向軸がランセットの長手方向軸にほぼ垂直である、実施形態Aのランス機構。
実施形態N
スロットカムの長手方向軸がランセットの長手方向軸に垂直である、実施形態Mのランス機構。
実施形態O
皮膚を穿刺するためのランス機構固定具であって、
皮膚を穿刺するようになされた穿刺端を有し、穿刺端がランセットの長手方向軸にほぼ平行な方向に可動であり、ランセットの穿刺端が順方向ストロークの際、第1の位置から第2の位置へと可動であり、ランセットの穿刺端が戻りストロークの際、第2の位置から第1の位置へと可動である、固定具上に配設されたランセットと、
スロットカムおよびカムフォロアを含み、カムフォロアがランセットに連結されており、スロットカムの長手方向軸がランセットの長手方向軸にほぼ垂直になるようにカムフォロアがスロットカムに係合しており、カムフォロアおよび連結されたランセットを一定の距離だけ動かすようにスロットカムがその長手方向軸に沿って可動であるカム機構と、
スロットカムに連結され、スロットカムを動かすことを補助するようになされた駆動部材と、
ランセットの移動軸に沿って位置し、皮膚表面を穿刺端からある距離に配置し、穿刺端が皮膚表面を穿刺するときに通過する穴を含むエンドキャップとを含む、ランス機構固定具。
実施形態P
エンドキャップにかかる力の大きさを記録する、エンドキャップに連結された力記録部材をさらに含む、実施形態Oのランス機構。
実施形態Q
力記録部材が環状ロードセルである、実施形態Pのランス機構。
実施形態R
力記録部材がばね式機構である、実施形態Pのランス機構。
実施形態S
所定の大きさの力がエンドキャップにかかると力記録部材が駆動部材を作動する、実施形態Pのランス機構。
実施形態T
ランセットの穿刺深さを調整するための穿刺端調整機構およびエンドキャップ調整機構をさらに含む、実施形態Oのランス機構。
実施形態U
高速ビデオシステムをさらに含む、実施形態Tのランス機構。
実施形態V
エンドキャップがほぼ透明で測定マークを備えている、実施形態Tのランス機構。
実施形態W
エンドキャップが観察レンズおよび測定マークを含む、実施形態Tのランス機構。
実施形態X
駆動部材がリニア誘導モータを含む、実施形態Oのランス機構。
実施形態Y
駆動部材がばね駆動機構を含む、実施形態Oのランス機構。
実施形態Z
スロットカムの長手方向軸がランセットの長手方向軸に垂直である、実施形態Oのランス機構。
実施形態AA
皮膚を穿刺するためのランス機構固定具であって、
皮膚を穿刺するようになされた穿刺端を有し、穿刺端がランセットの長手方向軸にほぼ平行な方向に可動であり、ランセットの穿刺端が順方向ストロークの際、第1の位置から第2の位置へと可動であり、ランセットの穿刺端が戻りストロークの際、第2の位置から第1の位置へと可動である、固定具上に配設されたランセットと、
スロットカムおよびカムフォロアを含み、カムフォロアがランセットに連結されており、スロットカムの長手方向軸がランセットの長手方向軸にほぼ垂直になるようにカムフォロアがスロットカムに係合しており、カムフォロアおよび連結されたランセットを一定の距離だけ動かすようにスロットカムがその長手方向軸に沿って可動であるカム機構と、
スロットカムに連結され、スロットカムを一定距離だけ動かすことを補助するようになされたばねデバイスと、
ランセットの移動軸に沿って位置し、皮膚表面を穿刺端からある距離に配置し、穿刺端が皮膚を穿刺するときに通過する穴を含むエンドキャップと、
エンドキャップにかかる力の大きさを記録し、所定の大きさの力がエンドキャップにかかると駆動部材を作動する、エンドキャップに連結された力記録部材と、
ランセットの穿刺端の穿刺深さを調整するための穿刺端調整機構およびエンドキャップ調整機構とを含む、ランス機構固定具。
方法BB
ランス機構を使用して血液試料を採取するように皮膚を穿刺するための方法であって、ランス機構がスロットカム、ランセット、エンドキャップ、駆動部材、トリガを含み、
力記録部材に連結されたエンドキャップにユーザの皮膚を押し付ける動作と、
エンドキャップに加えられた力を測定する動作と、
所定の大きさの力がエンドキャップにかかると駆動部材を作動する動作とを含み、駆動部材がスロットカムを線形方向に動かし、スロットカムの線形動作がランセットを第1の位置から第2の位置へ、かつ第1の位置へと戻るように動かし、それによりユーザの皮膚に単回穿刺が行われる方法。
方法CC
皮膚表面と穿刺端の間の所望の隙間を確保するように、穿刺端およびエンドキャップの位置を調整する動作をさらに含む、方法BBの方法。
【0031】
本発明は様々な修正および代替形態を受け入れる余地があるが、特定の実施形態を図面において例を使用して示し、詳細に説明した。ただし、これは本発明を開示された特定の形態に制限するものではなく、反対に、添付の特許請求の範囲に規定される本発明の精神および範囲内に含まれるあらゆる修正、等価物、代替を包含するものである。
【図面の簡単な説明】
【0032】
【図1a】本発明の一実施形態による、ランス前位置で示すランス機構の上面図である。
【図1b】本発明の一実施形態による、ランス前位置で示すランス機構の斜視図である。
【図2a】本発明の一実施形態による、おおよそのストローク中の位置で示すランス機構の上面図である。
【図2b】本発明の一実施形態による、おおよそのストローク中の位置で示すランス機構の斜視図である。
【図3a】本発明の一実施形態による、ランス後位置で示すランス機構の上面図である。
【図3b】本発明の一実施形態による、ランス後位置で示すランス機構の斜視図である。
【特許請求の範囲】
【請求項1】
皮膚を穿刺するためのランス機構固定具であって、
皮膚を穿刺するようになされた穿刺端を有し、前記穿刺端がランセットの長手方向軸にほぼ平行な方向に可動であり、前記穿刺端が順方向ストロークの際に第1の位置から第2の位置へと可動であり、前記穿刺端が戻りストロークの際に前記第2の位置から前記第1の位置へと可動である、固定具に配設されたランセットと、
スロットカムおよびカムフォロアを含み、前記カムフォロアが前記ランセットに連結されており、前記スロットカムの長手方向軸が前記ランセットの長手方向軸にほぼ垂直になるように前記カムフォロアが前記スロットカムに係合しており、前記カムフォロアおよび連結された前記ランセットを一定の距離だけ動かすように前記スロットカムがその長手方向軸に沿って可動であるカム機構と、
前記スロットカムに連結され、前記スロットカムを動かすことを補助するようになされた駆動部材とを含む、ランス機構固定具。
【請求項2】
前記ランセットの移動軸に沿って位置するエンドキャップをさらに含み、前記エンドキャップが皮膚表面を前記穿刺端からある距離に配置し、前記エンドキャップが前記穿刺端が前記皮膚表面を穿刺するときに通過する穴を含む、請求項1に記載のランス機構。
【請求項3】
前記エンドキャップにかかる力の大きさを記録する、前記エンドキャップに連結された力記録部材をさらに含む、請求項2に記載のランス機構。
【請求項4】
前記力記録部材が環状ロードセルである、請求項3に記載のランス機構。
【請求項5】
前記力記録部材がばね式機構である、請求項3に記載のランス機構。
【請求項6】
所定の大きさの力が前記エンドキャップにかかると前記力記録部材が前記駆動部材を作動する、請求項3に記載のランス機構。
【請求項7】
前記ランセットの穿刺深さを調整するための穿刺端調整機構およびエンドキャップ調整機構をさらに含む、請求項2に記載のランス機構。
【請求項8】
高速ビデオシステムをさらに含む、請求項7に記載のランス機構。
【請求項9】
前記エンドキャップがほぼ透明で測定マークを備えている、請求項7に記載のランス機構。
【請求項10】
前記エンドキャップが観察レンズおよび測定マークを含む、請求項7に記載のランス機構。
【請求項11】
前記駆動部材がリニア誘導モータである、請求項1に記載のランス機構。
【請求項12】
前記駆動部材がばね駆動機構である、請求項1に記載のランス機構。
【請求項13】
前記スロットカムの長手方向軸が前記ランセットの長手方向軸にほぼ垂直である、請求項1に記載のランス機構。
【請求項14】
前記スロットカムの長手方向軸が前記ランセットの長手方向軸に垂直である、請求項13に記載のランス機構。
【請求項15】
皮膚を穿刺するためのランス機構固定具であって、
皮膚を穿刺するようになされた穿刺端を有し、前記穿刺端がランセットの長手方向軸にほぼ平行な方向に可動であり、前記穿刺端が順方向ストロークの際に第1の位置から第2の位置へと可動であり、前記穿刺端が戻りストロークの際に前記第2の位置から前記第1の位置へと可動である、固定具に配設されたランセットと、
スロットカムおよびカムフォロアを含み、前記カムフォロアが前記ランセットに連結されており、前記スロットカムの長手方向軸が前記ランセットの長手方向軸にほぼ垂直になるように前記カムフォロアが前記スロットカムに係合しており、前記カムフォロアおよび連結された前記ランセットを一定の距離だけ動かすように前記スロットカムがその長手方向軸に沿って可動であるカム機構と、
前記スロットカムに連結され、前記スロットカムを動かすことを補助するようになされた駆動部材と、
前記ランセットの移動軸に沿って位置し、皮膚表面を前記穿刺端からある距離に配置し、前記穿刺端が前記皮膚表面を穿刺するときに通過する穴を含むエンドキャップとを含む、ランス機構固定具。
【請求項16】
前記エンドキャップにかかる力の大きさを記録する、前記エンドキャップに連結された力記録部材をさらに含む、請求項15に記載のランス機構。
【請求項17】
前記力記録部材が環状ロードセルである、請求項16に記載のランス機構。
【請求項18】
前記力記録部材がばね式機構である、請求項16に記載のランス機構。
【請求項19】
所定の大きさの力が前記エンドキャップにかかると前記力記録部材が前記駆動部材を作動するようになされている、請求項16に記載のランス機構。
【請求項20】
前記ランセットの穿刺深さを調整するための穿刺端調整機構およびエンドキャップ調整機構をさらに含む、請求項15に記載のランス機構。
【請求項21】
高速ビデオシステムをさらに含む、請求項20に記載のランス機構。
【請求項22】
前記エンドキャップがほぼ透明で測定マークを備えている、請求項20に記載のランス機構。
【請求項23】
前記エンドキャップが観察レンズおよび測定マークを含む、請求項20に記載のランス機構。
【請求項24】
前記駆動部材がリニア誘導モータを含む、請求項15に記載のランス機構。
【請求項25】
前記駆動部材がばね駆動機構を含む、請求項15に記載のランス機構。
【請求項26】
前記スロットカムの長手方向軸が前記ランセットの長手方向軸に垂直である、請求項15に記載のランス機構。
【請求項27】
皮膚を穿刺するためのランス機構固定具であって、
皮膚を穿刺するようになされた穿刺端を有し、前記穿刺端がランセットの長手方向軸にほぼ平行な方向に可動であり、前記穿刺端が順方向ストロークの際に第1の位置から第2の位置へと可動であり、前記穿刺端が戻りストロークの際に前記第2の位置から前記第1の位置へと可動である、固定具に配設されたランセットと、
スロットカムおよびカムフォロアを含み、前記カムフォロアが前記ランセットに連結されており、前記スロットカムの長手方向軸が前記ランセットの長手方向軸にほぼ垂直になるように前記カムフォロアが前記スロットカムに係合しており、前記カムフォロアおよび連結された前記ランセットを一定の距離だけ動かすように前記スロットカムがその長手方向軸に沿って可動であるカム機構と、
前記スロットカムに連結され、前記スロットカムを一定距離だけ動かすことを補助するようになされたばねデバイスと、
前記ランセットの移動軸に沿って位置し、皮膚表面を前記穿刺端からある距離に配置し、前記穿刺端が前記皮膚を穿刺するときに通過する穴を含むエンドキャップと、
前記エンドキャップにかかる力の大きさを記録し、所定の大きさの力が前記エンドキャップにかかると前記駆動部材を作動する、前記エンドキャップに連結された力記録部材と、
前記ランセットの穿刺深さを調整するための穿刺端調整機構およびエンドキャップ調整機構とを含む、ランス機構固定具。
【請求項28】
ランス機構を使用して血液試料を採取するように皮膚を穿刺するための方法であって、前記ランス機構がスロットカム、ランセット、エンドキャップ、駆動部材およびトリガを含み、
力記録部材に連結された前記エンドキャップにユーザの皮膚を押し付ける動作と、
前記エンドキャップに加えられた力を測定する動作と、
所定の大きさの力が前記エンドキャップにかかると前記駆動部材を作動する動作とを含み、
前記駆動部材が前記スロットカムを線形方向に動かし、前記スロットカムの線形動作が前記ランセットを第1の位置から第2の位置へ、かつ前記第1の位置へと戻るように動かし、それによりユーザの皮膚に単回穿刺が行われる方法。
【請求項29】
前記皮膚表面と前記穿刺端の間の所望の隙間を確保するように、前記穿刺端および前記エンドキャップの位置を調整する動作をさらに含む、請求項28に記載の方法。
【請求項1】
皮膚を穿刺するためのランス機構固定具であって、
皮膚を穿刺するようになされた穿刺端を有し、前記穿刺端がランセットの長手方向軸にほぼ平行な方向に可動であり、前記穿刺端が順方向ストロークの際に第1の位置から第2の位置へと可動であり、前記穿刺端が戻りストロークの際に前記第2の位置から前記第1の位置へと可動である、固定具に配設されたランセットと、
スロットカムおよびカムフォロアを含み、前記カムフォロアが前記ランセットに連結されており、前記スロットカムの長手方向軸が前記ランセットの長手方向軸にほぼ垂直になるように前記カムフォロアが前記スロットカムに係合しており、前記カムフォロアおよび連結された前記ランセットを一定の距離だけ動かすように前記スロットカムがその長手方向軸に沿って可動であるカム機構と、
前記スロットカムに連結され、前記スロットカムを動かすことを補助するようになされた駆動部材とを含む、ランス機構固定具。
【請求項2】
前記ランセットの移動軸に沿って位置するエンドキャップをさらに含み、前記エンドキャップが皮膚表面を前記穿刺端からある距離に配置し、前記エンドキャップが前記穿刺端が前記皮膚表面を穿刺するときに通過する穴を含む、請求項1に記載のランス機構。
【請求項3】
前記エンドキャップにかかる力の大きさを記録する、前記エンドキャップに連結された力記録部材をさらに含む、請求項2に記載のランス機構。
【請求項4】
前記力記録部材が環状ロードセルである、請求項3に記載のランス機構。
【請求項5】
前記力記録部材がばね式機構である、請求項3に記載のランス機構。
【請求項6】
所定の大きさの力が前記エンドキャップにかかると前記力記録部材が前記駆動部材を作動する、請求項3に記載のランス機構。
【請求項7】
前記ランセットの穿刺深さを調整するための穿刺端調整機構およびエンドキャップ調整機構をさらに含む、請求項2に記載のランス機構。
【請求項8】
高速ビデオシステムをさらに含む、請求項7に記載のランス機構。
【請求項9】
前記エンドキャップがほぼ透明で測定マークを備えている、請求項7に記載のランス機構。
【請求項10】
前記エンドキャップが観察レンズおよび測定マークを含む、請求項7に記載のランス機構。
【請求項11】
前記駆動部材がリニア誘導モータである、請求項1に記載のランス機構。
【請求項12】
前記駆動部材がばね駆動機構である、請求項1に記載のランス機構。
【請求項13】
前記スロットカムの長手方向軸が前記ランセットの長手方向軸にほぼ垂直である、請求項1に記載のランス機構。
【請求項14】
前記スロットカムの長手方向軸が前記ランセットの長手方向軸に垂直である、請求項13に記載のランス機構。
【請求項15】
皮膚を穿刺するためのランス機構固定具であって、
皮膚を穿刺するようになされた穿刺端を有し、前記穿刺端がランセットの長手方向軸にほぼ平行な方向に可動であり、前記穿刺端が順方向ストロークの際に第1の位置から第2の位置へと可動であり、前記穿刺端が戻りストロークの際に前記第2の位置から前記第1の位置へと可動である、固定具に配設されたランセットと、
スロットカムおよびカムフォロアを含み、前記カムフォロアが前記ランセットに連結されており、前記スロットカムの長手方向軸が前記ランセットの長手方向軸にほぼ垂直になるように前記カムフォロアが前記スロットカムに係合しており、前記カムフォロアおよび連結された前記ランセットを一定の距離だけ動かすように前記スロットカムがその長手方向軸に沿って可動であるカム機構と、
前記スロットカムに連結され、前記スロットカムを動かすことを補助するようになされた駆動部材と、
前記ランセットの移動軸に沿って位置し、皮膚表面を前記穿刺端からある距離に配置し、前記穿刺端が前記皮膚表面を穿刺するときに通過する穴を含むエンドキャップとを含む、ランス機構固定具。
【請求項16】
前記エンドキャップにかかる力の大きさを記録する、前記エンドキャップに連結された力記録部材をさらに含む、請求項15に記載のランス機構。
【請求項17】
前記力記録部材が環状ロードセルである、請求項16に記載のランス機構。
【請求項18】
前記力記録部材がばね式機構である、請求項16に記載のランス機構。
【請求項19】
所定の大きさの力が前記エンドキャップにかかると前記力記録部材が前記駆動部材を作動するようになされている、請求項16に記載のランス機構。
【請求項20】
前記ランセットの穿刺深さを調整するための穿刺端調整機構およびエンドキャップ調整機構をさらに含む、請求項15に記載のランス機構。
【請求項21】
高速ビデオシステムをさらに含む、請求項20に記載のランス機構。
【請求項22】
前記エンドキャップがほぼ透明で測定マークを備えている、請求項20に記載のランス機構。
【請求項23】
前記エンドキャップが観察レンズおよび測定マークを含む、請求項20に記載のランス機構。
【請求項24】
前記駆動部材がリニア誘導モータを含む、請求項15に記載のランス機構。
【請求項25】
前記駆動部材がばね駆動機構を含む、請求項15に記載のランス機構。
【請求項26】
前記スロットカムの長手方向軸が前記ランセットの長手方向軸に垂直である、請求項15に記載のランス機構。
【請求項27】
皮膚を穿刺するためのランス機構固定具であって、
皮膚を穿刺するようになされた穿刺端を有し、前記穿刺端がランセットの長手方向軸にほぼ平行な方向に可動であり、前記穿刺端が順方向ストロークの際に第1の位置から第2の位置へと可動であり、前記穿刺端が戻りストロークの際に前記第2の位置から前記第1の位置へと可動である、固定具に配設されたランセットと、
スロットカムおよびカムフォロアを含み、前記カムフォロアが前記ランセットに連結されており、前記スロットカムの長手方向軸が前記ランセットの長手方向軸にほぼ垂直になるように前記カムフォロアが前記スロットカムに係合しており、前記カムフォロアおよび連結された前記ランセットを一定の距離だけ動かすように前記スロットカムがその長手方向軸に沿って可動であるカム機構と、
前記スロットカムに連結され、前記スロットカムを一定距離だけ動かすことを補助するようになされたばねデバイスと、
前記ランセットの移動軸に沿って位置し、皮膚表面を前記穿刺端からある距離に配置し、前記穿刺端が前記皮膚を穿刺するときに通過する穴を含むエンドキャップと、
前記エンドキャップにかかる力の大きさを記録し、所定の大きさの力が前記エンドキャップにかかると前記駆動部材を作動する、前記エンドキャップに連結された力記録部材と、
前記ランセットの穿刺深さを調整するための穿刺端調整機構およびエンドキャップ調整機構とを含む、ランス機構固定具。
【請求項28】
ランス機構を使用して血液試料を採取するように皮膚を穿刺するための方法であって、前記ランス機構がスロットカム、ランセット、エンドキャップ、駆動部材およびトリガを含み、
力記録部材に連結された前記エンドキャップにユーザの皮膚を押し付ける動作と、
前記エンドキャップに加えられた力を測定する動作と、
所定の大きさの力が前記エンドキャップにかかると前記駆動部材を作動する動作とを含み、
前記駆動部材が前記スロットカムを線形方向に動かし、前記スロットカムの線形動作が前記ランセットを第1の位置から第2の位置へ、かつ前記第1の位置へと戻るように動かし、それによりユーザの皮膚に単回穿刺が行われる方法。
【請求項29】
前記皮膚表面と前記穿刺端の間の所望の隙間を確保するように、前記穿刺端および前記エンドキャップの位置を調整する動作をさらに含む、請求項28に記載の方法。
【図1a】

【図1b】
【図2a】
【図2b】
【図3a】
【図3b】
【図1b】
【図2a】
【図2b】
【図3a】
【図3b】
【公表番号】特表2008−512194(P2008−512194A)
【公表日】平成20年4月24日(2008.4.24)
【国際特許分類】
【出願番号】特願2007−531280(P2007−531280)
【出願日】平成17年9月8日(2005.9.8)
【国際出願番号】PCT/US2005/031766
【国際公開番号】WO2006/031535
【国際公開日】平成18年3月23日(2006.3.23)
【出願人】(503106111)バイエル・ヘルスケア・エルエルシー (154)
【Fターム(参考)】
【公表日】平成20年4月24日(2008.4.24)
【国際特許分類】
【出願日】平成17年9月8日(2005.9.8)
【国際出願番号】PCT/US2005/031766
【国際公開番号】WO2006/031535
【国際公開日】平成18年3月23日(2006.3.23)
【出願人】(503106111)バイエル・ヘルスケア・エルエルシー (154)
【Fターム(参考)】
[ Back to top ]