
深層筋活性化装置および深層筋活性化方法
【課題】深層筋を活性化させることができる深層筋活性化装置を提供する。
【解決手段】人体の表皮のうち、その表皮の近傍に位置する表皮近傍骨に振動が伝達される表皮である骨近傍表皮を、振動体により振動させることにより表皮近傍骨を振動させる。このときの振動の周波数は、活性化させようとする深層筋の近傍に位置する骨である深層筋近傍骨のn次共振周波数を含む周波数とする。この表皮近傍骨の振動が、人体の骨により伝達されて、深層筋の近傍に位置する深層筋近傍骨が振動し、深層筋近傍骨の振動により深層筋が振動させられることで、この深層筋を活性化させる。
【解決手段】人体の表皮のうち、その表皮の近傍に位置する表皮近傍骨に振動が伝達される表皮である骨近傍表皮を、振動体により振動させることにより表皮近傍骨を振動させる。このときの振動の周波数は、活性化させようとする深層筋の近傍に位置する骨である深層筋近傍骨のn次共振周波数を含む周波数とする。この表皮近傍骨の振動が、人体の骨により伝達されて、深層筋の近傍に位置する深層筋近傍骨が振動し、深層筋近傍骨の振動により深層筋が振動させられることで、この深層筋を活性化させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、深層筋活性化装置および深層筋活性化方法に関する。
【背景技術】
【0002】
リハビリテーションでは、表層筋の過緊張を緩和させることが目的の一つである。表層筋が過緊張を起こしていると、上肢・下肢の運動や行為の自由度を阻害する。それだけではなく、表層筋の過緊張は姿勢保持も困難にしてしまう。
【0003】
従来、理学療法によるリハビリテーションとして、深層筋を活性化させることで、表層筋の緊張を緩和する手法が知られている。深層筋は姿勢保持に関係する筋肉であるから、深層筋が活性化することで姿勢保持が容易になり、その結果、表層筋が自由に動けるようになることから、表層筋が緩和されるのである。
【0004】
理学療法において、深層筋を活性化させるための方法は、具体的には、理学療法士が患者に対して直接手で振動を与える方法であり、個人の技量によって結果が大きく変わってしまう。また、患者に対して直接手で振動を与えて深層筋を活性化させるこの方法は、相当の熟練が必要であり、深層筋を実際に活性化させることができる理学療法士の数は極少数である。そのため、この療法を望む患者全員が、この療法を受けられるわけではない。
【0005】
そこで、人体に振動を与えることで深層筋を活性化させることができる装置が望まれる。このような装置があれば、熟練者でなくても、この装置を用いることで深層筋を活性化させることができる。
【0006】
ここで、筋肉の緊張を緩和させることができる装置としては、たとえば、特許文献1、2のものなど種々の装置が知られている。特許文献1では、背もたれ部が傾斜しており、且つ、背もたれ部、座部に加えて下腿支持部も備えた椅子において、4つの振動要素を配置した装置が開示されている。これら4つの振動要素は、そのうちの2つが背もたれ部に配置され、1つが座部において臀部に対するように配置され、残りの1つが下腿支持部に配置されている。そして、これら4つの振動要素を、位相を互いにずらして振動させることで、体の上部から下部まで、順次、振動によるマッサージ部位が移動するローリングマッサージ効果を生じさせている。
【0007】
また、特許文献2には、超音波振動器具を患部に押し当てて超音波振動を患部に作用させることにより、筋肉を揉みほぐすことができることが開示されている。また、この特許文献2には、超音波振動は、人体表層部の患部に対しては有効に作用させることができるが、深層部の患部に対しては作用する超音波が大きく減衰して有効ではないことが記載されている。そこで、この特許文献2では、この深層部の患部を治療する目的で、人体表面に押し当てる先端部に焼結フェライトを組み込んでいる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特表平4−501073号公報
【特許文献2】特開2000−217854号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1、2に例示される、振動を筋肉に作用させる従来の器具は、いずれも表層筋に作用するだけであり、深層筋には作用しなかった。その理由は、特許文献2にもあるように、超音波(すなわち振動)は、深層部に到達するまでに大きく減衰してしまうからである。すなわち、深層筋を活性化させることができる装置は全く存在しておらず、また、装置を用いて深層筋を活性化させる方法も、従来、存在していなかった。
【0010】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、深層筋を活性化させることができる装置、装置を用いて深層筋を活性化する方法を提供することにある。
【課題を解決するための手段】
【0011】
その目的を達成するための請求項1記載の発明装置である深層筋活性化装置は、人体の表皮のうち、その表皮の近傍に位置する表皮近傍骨に振動が伝達される表皮である骨近傍表皮を振動可能な振動体を備える。そして、その振動体が、活性化させようとする深層筋の近傍に位置する骨である深層筋近傍骨のn次共振周波数(nは自然数)を含む周波数で振動する。
【0012】
本発明の深層筋活性化装置が備える振動体により骨近傍表皮を振動させると、骨近傍表皮の振動により、その表皮の近傍の骨(表皮近傍骨)が振動する。表皮近傍にある骨と、深層筋の近傍に位置する骨(深層筋近傍骨)とは、他の複数の骨により連結されていることから、表皮近傍骨の振動は、人体の骨により伝達されて、深層筋近傍骨が振動する。そして、深層筋近傍骨の振動により深層筋が振動させられる。
【0013】
加えて、振動体は、活性化させようとする深層筋の近傍に位置する深層筋近傍骨のn次共振周波数で振動することから、深層筋近傍骨もこの周波数、すなわち、自身のn次共振周波数で振動する。よって、深層筋近傍骨は大きく振動することになるので、深層筋近傍骨の近傍に存在する深層筋も大きく振動することになり、深層筋が良好に活性化される。
【0014】
ここで、活性化させようとする深層筋の近傍に位置する骨が脊椎部の骨である場合、請求項2記載の発明のように、振動体は、深層筋近傍骨としての脊椎部の骨のn次共振周波数を含む周波数で振動することが好ましい。
【0015】
このようにすれば、脊椎部の骨を大きく振動させることができ、その結果、脊椎部の骨の近傍に存在する深層筋が良好に活性化される。
【0016】
また、請求項3記載のように、振動体は、n次共振周波数を含むゆらぎを有する周波数で振動することが好ましい。人体は複雑な構造であり、深層筋や深層筋近傍骨も例外ではなく複雑な構造を有する。それ故、厳密には、部位が少しでも異なれば、共振周波数も異なる。しかしながら、互いに近接する部位の立体構造は互いに類似することから、互いに近接する部位の共振周波数は互いに近接する周波数となる。そこで、この請求項3記載のように、振動体が、n次共振周波数を含むゆらぎを有する周波数で振動するようにすると、この振動により大きく振動する深層筋近傍骨の範囲が広くなる。よって、比較的広い範囲の深層筋を活性化させることができる。
【0017】
振動体を、n次共振周波数を含むゆらぎを有する周波数で振動させるには、たとえば、請求項4記載のようにすることができる。その請求項4記載の発明では、n次共振周波数を含む所定周波数幅の白色雑音信号を生成する白色雑音信号生成部を備え、白色雑音信号生成部が生成した白色雑音信号を、n次共振周波数を中心周波数とするインパルス応答回路に通すことにより振動体への司令信号を生成する。このように、白色雑音生成部とインパルス応答回路を用いれば、容易に、振動体を所望の周波数で振動させることができる。
【0018】
請求項5以下の発明は、深層筋を活性化させる方法に関する発明である。請求項5記載の発明は、表皮のうち、その表皮の近傍に位置する表皮近傍骨に振動が伝達される表皮である骨近傍表皮を、振動体により振動させることにより表皮近傍骨を振動させ、この表皮近傍骨の振動が、前記人体の骨により伝達されて、深層筋の近傍に位置する深層筋近傍骨が振動し、深層筋近傍骨の振動により深層筋が振動させられることで、この深層筋を活性化させることを特徴とする深層筋活性化方法である。
【0019】
振動体により筋肉を活性化させる従来の方法では、活性化させようとする筋肉が表層筋であり、その表層筋が直下にある表皮に振動体を当接させて、振動を発生させていた。これに対して、この発明では、骨近傍表皮を振動させる。この骨近傍表皮は、その表皮の近傍に位置する表皮近傍骨に振動が伝達される表皮である。よって、この表皮を振動させることにより、その表皮の近傍の骨(表皮近傍骨)が振動する。表皮近傍にある骨と、深層筋の近傍に位置する骨(深層筋近傍骨)とは、他の複数の骨により連結されていることから、表皮近傍骨の振動は、人体の骨により伝達されて、深層筋近傍骨が振動する。そして、深層筋近傍骨の振動により深層筋が振動させられるので、深層筋を活性化できるのである。
【0020】
請求項6記載の発明は、表皮近傍骨が骨盤を構成する骨であり、振動体により振動させる骨近傍表皮が、骨盤を構成する骨の近傍の表皮である。また、請求項7記載の発明は、皮近傍骨が、骨盤を構成する骨のうちの坐骨であり、振動体により振動させる骨近傍表皮が、坐骨の下端部の近傍の表皮であることを特徴とする。請求項8記載の発明は、表皮近傍骨が踵骨であり、振動体により振動させる骨近傍表皮が、踵骨の下面の近傍の表皮である。
【0021】
請求項9記載の発明では、振動体により、骨近傍表皮を、活性化させようとする深層筋の近傍に位置する骨のn次共振周波数を含む周波数で振動させる。
【0022】
請求項10記載の発明では、振動体により、骨近傍表皮を、n次共振周波数を含むゆらぎを有する周波数で振動させる。
【図面の簡単な説明】
【0023】
【図1】深層筋活性化装置10を用いて深層筋を活性化させる方法を説明する図である。
【図2】深層筋活性化装置10の概略構成を示す図である。
【図3】ゆらぎを持った周波数で振動体12を振動させる場合の司令信号を例示した図である。
【図4】振動させたい部位の共振周波数を調べる方法の一例を説明する図である。
【図5】同定用振動と、センサ出力値と、振動源から振動センサ取り付け位置までの伝達特性との関係を示す図である。
【図6】振動制御部16の具体的構成を示す図である。
【発明を実施するための形態】
【0024】
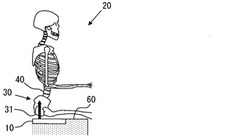
以下、本発明の実施形態を図面に基づいて説明する。図1は、深層筋活性化装置10を用いて深層筋を活性化させる方法を説明している図である。この深層筋活性化装置10は、表層筋に振動を与えることを目的としていた従来の振動装置とは異なり、骨を媒体として深層筋を振動させるために、表皮の近傍に位置する骨(表皮近傍骨)に表皮から振動を与える装置である。そこで、どの骨に振動が伝達されるかを示すために、人体は骨格図で示している。なお、深層筋活性化装置10と人体20との間に隙間があるのは、実際には、骨と深層筋活性化装置10との間には、表皮、筋肉等が存在しており、骨と深層筋活性化装置10は直接的には接触しないからである。
【0025】
図1の例では、深層筋活性化装置10は、その上面が座面と一致するように配置されている。この構成は、たとえば、椅子の座板部60にこの深層筋活性化装置10を埋め込むことで得られる。また、深層筋活性化装置10を大きくして、深層筋活性化装置10を座板部60として利用する構成としてもよい。
【0026】
この深層筋活性化装置10は、図1に矢印で示すように、座面に垂直方向に振動する。よって、上半身が略鉛直方向となるように座っている人体20に対して、正中線方向に振動を加えることになる。
【0027】
また、上半身が略鉛直方向となるように座っている場合、坐骨31の下端は表皮の近傍に位置している状態であり、坐骨31が表皮近傍骨に相当することになる。この図1において、深層筋活性化装置10が振動すると、その振動は、坐骨31を振動させる。坐骨31は骨盤30を構成する骨の一つであり、坐骨31が振動することにより骨盤30の全体が振動する。さらに、骨盤30は腰椎40とつながっている。また、図1では上腕骨により隠れてしまっているが、腰椎40は胸椎とつながっている。
【0028】
よって、坐骨31の近傍表皮を深層筋活性化装置10により振動させることで、坐骨31→骨盤30の全体→腰椎40→胸椎と、振動が伝達される。腰椎40や胸椎は、胸半棘筋などの深層筋の極近傍に位置する深層筋近傍骨であり、これら腰椎40や胸椎が振動することにより、その近傍に位置する深層筋が受動的に振動させられることになる。これにより、深層筋を活性化させることができる。
【0029】
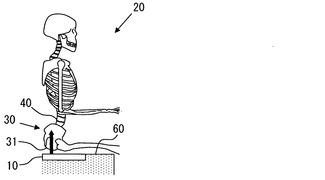
図2は、深層筋活性化装置10の概略構成を示す図である。図2に示すように、深層筋活性化装置10は、振動体12、電力増幅部14、振動制御部16を備える。これらが図示しない中空平板状の筐体内に収容されており、振動体12はその振動により筐体を振動させる。
【0030】
振動体12は、電気信号を機械的振動に変換する電気−振動変換機能を有している。たとえば、この振動体12としては、周知の種々の圧電体を用いることができる。また、所謂スピーカを用いることもできる。振動制御部16は、振動体12の振動周波数を指令する司令信号を生成して、電力増幅部14へ出力する。電力増幅部14は、司令信号を増幅し、その増幅した司令信号を振動体12へ入力する。これにより、振動体12は指令信号の周波数で振動する。
【0031】
このようにして振動体12が振動する際の周波数は、深層筋近傍骨の共振周波数のn次を含む周波数であることが好ましい。この共振周波数で振動体12が振動すれば、深層筋近傍骨は大きく振動することになるので、深層筋近傍骨の近傍に存在する深層筋も大きく振動させられ、深層筋が良好に活性化されるからである。
【0032】
よって、腰椎、胸椎の近傍の深層筋を活性化させる場合、この腰椎、胸椎の共振周波数で振動体12を振動させることが好ましい。なお、これら腰椎、胸椎の共振周波数は40Hz付近であることが既に知られている。ただし、人体は複雑な構造であり、腰椎、胸椎や、その近傍の深層筋も例外ではなく複雑な構造を有する。それ故、腰椎および胸椎を振動させようとする場合や、腰椎のみ、胸椎のみでも、ある程度の範囲を振動させようとする場合、その範囲の骨が有する共振周波数は、ある程度の周波数幅を持つことになる。そこで、振動体12を、振動させたい部位の共振周波数のn次共振周波数(nは自然数)を含む(好ましくはそのn次共振周波数を中心とする)ゆらぎをもった周波数で振動させる。
【0033】
また、単一の周波数の振動では、順応による効果低下やしびれも懸念されるが、ゆらぎを持った周波数で振動させることで、これら順応による効果低下やしびれも抑制できる。
【0034】
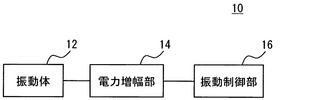
図3には、このようにゆらぎを持った周波数で振動体12を振動させる場合の司令信号を例示している。図3の例では、ある共振周波数ω0を中心とする周波数f1〜f2までの幅を持った司令信号が示されている。この司令信号が出力されることにより、振動体12も、この図3の周波数分布を持った周波数で振動する。
【0035】
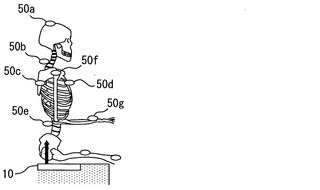
次に、振動させたい部位の共振周波数を調べる方法の一例を図4を用いて説明する。図4では、人体20の種々の部位に振動センサ50が取り付けられている。具体的には、振動センサ50aは頭頂部に取り付けられており、振動センサ50bは頚椎近傍の表皮に取り付けられており、振動センサ50cは胸椎近傍の表皮に取り付けられており、振動センサ50dは胸骨近傍の表皮に取り付けられており、振動センサ50eは腰椎近傍の表皮に取り付けられ、振動センサ50fは上腕骨の上端近傍の表皮に取り付けられており、振動センサ50gは前腕骨の先端近傍の表皮に取り付けられている。
【0036】
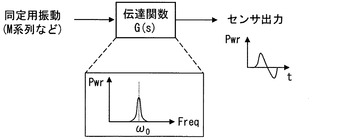
このようにして振動センサ50を取り付けた状態で、深層筋活性化装置10(或いはその他の振動発生装置でもよい)により同定用振動を発生させる。この同定用振動としては、たとえば、M系列(擬似乱数)の振動を同定用振動として発生させる。そして、この同定用振動を発生させた状態で振動センサ50により振動を検出する。
【0037】
このようにすると、図5に示すように、同定用振動が、伝達関数G(s)により変化した値が、振動センサ50からの出力信号と考えることができる。よって、同定用振動とセンサ出力値とを用いて、同定用振動が入力された部位から振動センサ50が取り付けられた部位までの伝達特性を決定することができる。図5の中央に示すグラフがこの伝達特性を概念的に示す図であり、この伝達特性においてピークとなっているのが、伝達経路が有する共振周波数ω0である。
【0038】
たとえば、振動センサ50aのセンサ出力値と同定用振動とにより、坐骨31から頭頂部までの振動の伝達特性が得られ、振動センサ50bのセンサ出力値と同定用振動とにより、坐骨31から頚椎までの振動の伝達特性が得られる。また、このように振動の伝達特性を実測する場合、得られる伝達特性は、前述のゆらぎも反映された伝達特性が得られる。
【0039】
なお、一つの振動センサ50のセンサ出力値のみを用いて、共振させようとする部位の共振周波数を決定してもよいが、複数の振動センサ50のセンサ出力結果を用いて、共振させようとする部位の共振周波数を決定するようにしてもよい。また、共振させようとする部位の共振周波数が既に知られている場合には、既に知られているその値を用いてもよい。
【0040】
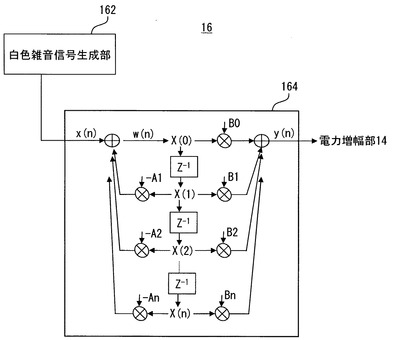
次に、共振させようとする部位の共振周波数を決定した後、その共振周波数を実際に発生させる構成を設計する方法の一例を説明する。図6に示したのは、振動制御部16の具体的構成であり、白色雑音信号生成部162と、IIRフィルタ回路164を備える。これらにより、共振させようとする部位の共振周波数を中心とするゆらぎを持った司令信号を生成し、その指令信号を電力増幅部14へ出力する。
【0041】
白色雑音信号生成部162は、目的とする司令信号の最低周波数(図3のf1)から最高周波数(図3のf2)までの白色雑音信号を生成して、IIRフィルタ回路164に入力する。IIRフィルタ回路164は、この白色雑音信号を波形整形して図3に例示したようなゆらぎを持った司令信号を生成する。
【0042】
白色雑音から所望の司令信号を生成するには、IIRフィルタ回路164のフィードバックフィルタ係数A、フィードフォワードフィルタ係数Bを適切な値に予め決定しておく必要がある。これら係数A、Bの決定方法としては、たとえば、IIRフィルタにおける周知の係数決定手法である直接法を用いる。このようにして予め係数A、Bを決定しておいたIIRフィルタ回路164に、f1からf2までの周波数幅を持つ白色雑音信号が入力されると、IIRフィルタ回路164から、図3に例示したような、振動させようとする部位の共振周波数を中心としたゆらぎを持った所望の司令信号を生成することができる。
【0043】
この司令信号が電力増幅部14により増幅されて振動体12に入力されることにより、振動体12は、振動させようとする部位の共振周波数を中心とするゆらぎを持った周波数で振動する。そして、その振動が、表皮近傍骨(図1では坐骨31)から深層筋近傍骨に伝達されて、その深層筋近傍骨が振動する。この振動により、深層筋が受動的に振動させられることにより、深層筋が活性化するのである。
【0044】
これまでの説明では、表皮近傍骨として坐骨31を例示していたが、この表皮近傍骨は、表皮の近傍に位置する骨であればよい。たとえば、骨盤を構成する坐骨以外の骨(腸骨など)や、踵骨などが表皮近傍骨である。そして、人体の表皮のうち、その表皮の振動により、前述した骨に振動が伝達される表皮が骨近傍表皮である。表皮を手で触り、骨の存在を確認できる場合、その部位は骨近傍表皮に該当し、存在を確認できた骨は、表皮近傍骨である。
【0045】
なお、骨盤は表皮近傍骨であることは前述したが、骨盤の全てが表皮の近傍に存在しているわけではない。たとえば、骨盤のうちでも、大殿筋が表皮との間に介在している部分(一般的に臀部と言われる部分)は、大殿筋が分厚い筋肉であるため、表皮近傍骨ではない。換言すれば、骨盤との間に大殿筋が介在している表皮は、骨近傍表皮ではない。この部分に振動を与えても、表層筋である大殿筋により振動が大きく減衰してしまい、深層筋に振動を伝達することができない。
【0046】
表皮を手で触って骨の存在を確認できる部位はであれば、骨近傍表皮であることは前述したが、表皮を手で触って骨の存在を確認できる部位は、人体には多数存在する。ただし、多数存在する骨近傍表皮のうちでも、この骨近傍表皮に対応する表皮近傍骨が大きな骨である表皮に振動を与えることが好ましい。骨を媒体として振動を深層筋まで伝達するには、骨近傍表皮を大きな振動強度で振動させることが好ましく、大きな骨であるほど大きな振動強度で振動させることが容易だからである。この条件を満たす表皮近傍骨としては、たとえば、骨盤を構成する骨、踵骨、頭蓋骨がある。これらの骨に振動を伝達できる表皮が骨近傍表皮であるが、踵骨に対しては、その下面(特に下面であって踵骨後部)の近傍の表皮を振動させることが好ましい。
【0047】
振動体12は、上記骨近傍表皮を振動させるものであり、振動体12の外形形状は、種々の形状が可能である。たとえば、図1の例では、振動体12により振動させられる筐体は平板形状となっていた。このように、単に板状となっていても良いし、また、上記近傍表皮の湾曲形状と嵌り合う形状となっていてもよい。
【0048】
また、前述の実施形態では、振動の周波数帯の中心が共振周波数ω0である振動を与えていたが、必ずしも、共振周波数ω0が振動の周波数帯の中心である必要はなく、共振周波数ω0を含む周波数帯の振動であればよい。また、共振周波数ω0そのものではなく、その周波数のn次の周波数を含む振動としてもよい。
【0049】
また、振動の周波数をゆらぎを持った周波数とする場合、そのゆらぎは、前述のように実測して決定してもよいし、それ以外に、ガウス分布のゆらぎや1/fゆらぎなど、ゆらぎの具体的周波数分布は種々変更してもよい。
【符号の説明】
【0050】
10 深層筋活性化装置 12 振動体 14 電力増幅部 16 振動制御部 20 人体 30 骨盤 31 坐骨 40 腰椎 50 振動センサ 60 座板部 162 白色信号生成部 164 IIRフィルタ回路
【技術分野】
【0001】
本発明は、深層筋活性化装置および深層筋活性化方法に関する。
【背景技術】
【0002】
リハビリテーションでは、表層筋の過緊張を緩和させることが目的の一つである。表層筋が過緊張を起こしていると、上肢・下肢の運動や行為の自由度を阻害する。それだけではなく、表層筋の過緊張は姿勢保持も困難にしてしまう。
【0003】
従来、理学療法によるリハビリテーションとして、深層筋を活性化させることで、表層筋の緊張を緩和する手法が知られている。深層筋は姿勢保持に関係する筋肉であるから、深層筋が活性化することで姿勢保持が容易になり、その結果、表層筋が自由に動けるようになることから、表層筋が緩和されるのである。
【0004】
理学療法において、深層筋を活性化させるための方法は、具体的には、理学療法士が患者に対して直接手で振動を与える方法であり、個人の技量によって結果が大きく変わってしまう。また、患者に対して直接手で振動を与えて深層筋を活性化させるこの方法は、相当の熟練が必要であり、深層筋を実際に活性化させることができる理学療法士の数は極少数である。そのため、この療法を望む患者全員が、この療法を受けられるわけではない。
【0005】
そこで、人体に振動を与えることで深層筋を活性化させることができる装置が望まれる。このような装置があれば、熟練者でなくても、この装置を用いることで深層筋を活性化させることができる。
【0006】
ここで、筋肉の緊張を緩和させることができる装置としては、たとえば、特許文献1、2のものなど種々の装置が知られている。特許文献1では、背もたれ部が傾斜しており、且つ、背もたれ部、座部に加えて下腿支持部も備えた椅子において、4つの振動要素を配置した装置が開示されている。これら4つの振動要素は、そのうちの2つが背もたれ部に配置され、1つが座部において臀部に対するように配置され、残りの1つが下腿支持部に配置されている。そして、これら4つの振動要素を、位相を互いにずらして振動させることで、体の上部から下部まで、順次、振動によるマッサージ部位が移動するローリングマッサージ効果を生じさせている。
【0007】
また、特許文献2には、超音波振動器具を患部に押し当てて超音波振動を患部に作用させることにより、筋肉を揉みほぐすことができることが開示されている。また、この特許文献2には、超音波振動は、人体表層部の患部に対しては有効に作用させることができるが、深層部の患部に対しては作用する超音波が大きく減衰して有効ではないことが記載されている。そこで、この特許文献2では、この深層部の患部を治療する目的で、人体表面に押し当てる先端部に焼結フェライトを組み込んでいる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特表平4−501073号公報
【特許文献2】特開2000−217854号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1、2に例示される、振動を筋肉に作用させる従来の器具は、いずれも表層筋に作用するだけであり、深層筋には作用しなかった。その理由は、特許文献2にもあるように、超音波(すなわち振動)は、深層部に到達するまでに大きく減衰してしまうからである。すなわち、深層筋を活性化させることができる装置は全く存在しておらず、また、装置を用いて深層筋を活性化させる方法も、従来、存在していなかった。
【0010】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、深層筋を活性化させることができる装置、装置を用いて深層筋を活性化する方法を提供することにある。
【課題を解決するための手段】
【0011】
その目的を達成するための請求項1記載の発明装置である深層筋活性化装置は、人体の表皮のうち、その表皮の近傍に位置する表皮近傍骨に振動が伝達される表皮である骨近傍表皮を振動可能な振動体を備える。そして、その振動体が、活性化させようとする深層筋の近傍に位置する骨である深層筋近傍骨のn次共振周波数(nは自然数)を含む周波数で振動する。
【0012】
本発明の深層筋活性化装置が備える振動体により骨近傍表皮を振動させると、骨近傍表皮の振動により、その表皮の近傍の骨(表皮近傍骨)が振動する。表皮近傍にある骨と、深層筋の近傍に位置する骨(深層筋近傍骨)とは、他の複数の骨により連結されていることから、表皮近傍骨の振動は、人体の骨により伝達されて、深層筋近傍骨が振動する。そして、深層筋近傍骨の振動により深層筋が振動させられる。
【0013】
加えて、振動体は、活性化させようとする深層筋の近傍に位置する深層筋近傍骨のn次共振周波数で振動することから、深層筋近傍骨もこの周波数、すなわち、自身のn次共振周波数で振動する。よって、深層筋近傍骨は大きく振動することになるので、深層筋近傍骨の近傍に存在する深層筋も大きく振動することになり、深層筋が良好に活性化される。
【0014】
ここで、活性化させようとする深層筋の近傍に位置する骨が脊椎部の骨である場合、請求項2記載の発明のように、振動体は、深層筋近傍骨としての脊椎部の骨のn次共振周波数を含む周波数で振動することが好ましい。
【0015】
このようにすれば、脊椎部の骨を大きく振動させることができ、その結果、脊椎部の骨の近傍に存在する深層筋が良好に活性化される。
【0016】
また、請求項3記載のように、振動体は、n次共振周波数を含むゆらぎを有する周波数で振動することが好ましい。人体は複雑な構造であり、深層筋や深層筋近傍骨も例外ではなく複雑な構造を有する。それ故、厳密には、部位が少しでも異なれば、共振周波数も異なる。しかしながら、互いに近接する部位の立体構造は互いに類似することから、互いに近接する部位の共振周波数は互いに近接する周波数となる。そこで、この請求項3記載のように、振動体が、n次共振周波数を含むゆらぎを有する周波数で振動するようにすると、この振動により大きく振動する深層筋近傍骨の範囲が広くなる。よって、比較的広い範囲の深層筋を活性化させることができる。
【0017】
振動体を、n次共振周波数を含むゆらぎを有する周波数で振動させるには、たとえば、請求項4記載のようにすることができる。その請求項4記載の発明では、n次共振周波数を含む所定周波数幅の白色雑音信号を生成する白色雑音信号生成部を備え、白色雑音信号生成部が生成した白色雑音信号を、n次共振周波数を中心周波数とするインパルス応答回路に通すことにより振動体への司令信号を生成する。このように、白色雑音生成部とインパルス応答回路を用いれば、容易に、振動体を所望の周波数で振動させることができる。
【0018】
請求項5以下の発明は、深層筋を活性化させる方法に関する発明である。請求項5記載の発明は、表皮のうち、その表皮の近傍に位置する表皮近傍骨に振動が伝達される表皮である骨近傍表皮を、振動体により振動させることにより表皮近傍骨を振動させ、この表皮近傍骨の振動が、前記人体の骨により伝達されて、深層筋の近傍に位置する深層筋近傍骨が振動し、深層筋近傍骨の振動により深層筋が振動させられることで、この深層筋を活性化させることを特徴とする深層筋活性化方法である。
【0019】
振動体により筋肉を活性化させる従来の方法では、活性化させようとする筋肉が表層筋であり、その表層筋が直下にある表皮に振動体を当接させて、振動を発生させていた。これに対して、この発明では、骨近傍表皮を振動させる。この骨近傍表皮は、その表皮の近傍に位置する表皮近傍骨に振動が伝達される表皮である。よって、この表皮を振動させることにより、その表皮の近傍の骨(表皮近傍骨)が振動する。表皮近傍にある骨と、深層筋の近傍に位置する骨(深層筋近傍骨)とは、他の複数の骨により連結されていることから、表皮近傍骨の振動は、人体の骨により伝達されて、深層筋近傍骨が振動する。そして、深層筋近傍骨の振動により深層筋が振動させられるので、深層筋を活性化できるのである。
【0020】
請求項6記載の発明は、表皮近傍骨が骨盤を構成する骨であり、振動体により振動させる骨近傍表皮が、骨盤を構成する骨の近傍の表皮である。また、請求項7記載の発明は、皮近傍骨が、骨盤を構成する骨のうちの坐骨であり、振動体により振動させる骨近傍表皮が、坐骨の下端部の近傍の表皮であることを特徴とする。請求項8記載の発明は、表皮近傍骨が踵骨であり、振動体により振動させる骨近傍表皮が、踵骨の下面の近傍の表皮である。
【0021】
請求項9記載の発明では、振動体により、骨近傍表皮を、活性化させようとする深層筋の近傍に位置する骨のn次共振周波数を含む周波数で振動させる。
【0022】
請求項10記載の発明では、振動体により、骨近傍表皮を、n次共振周波数を含むゆらぎを有する周波数で振動させる。
【図面の簡単な説明】
【0023】
【図1】深層筋活性化装置10を用いて深層筋を活性化させる方法を説明する図である。
【図2】深層筋活性化装置10の概略構成を示す図である。
【図3】ゆらぎを持った周波数で振動体12を振動させる場合の司令信号を例示した図である。
【図4】振動させたい部位の共振周波数を調べる方法の一例を説明する図である。
【図5】同定用振動と、センサ出力値と、振動源から振動センサ取り付け位置までの伝達特性との関係を示す図である。
【図6】振動制御部16の具体的構成を示す図である。
【発明を実施するための形態】
【0024】
以下、本発明の実施形態を図面に基づいて説明する。図1は、深層筋活性化装置10を用いて深層筋を活性化させる方法を説明している図である。この深層筋活性化装置10は、表層筋に振動を与えることを目的としていた従来の振動装置とは異なり、骨を媒体として深層筋を振動させるために、表皮の近傍に位置する骨(表皮近傍骨)に表皮から振動を与える装置である。そこで、どの骨に振動が伝達されるかを示すために、人体は骨格図で示している。なお、深層筋活性化装置10と人体20との間に隙間があるのは、実際には、骨と深層筋活性化装置10との間には、表皮、筋肉等が存在しており、骨と深層筋活性化装置10は直接的には接触しないからである。
【0025】
図1の例では、深層筋活性化装置10は、その上面が座面と一致するように配置されている。この構成は、たとえば、椅子の座板部60にこの深層筋活性化装置10を埋め込むことで得られる。また、深層筋活性化装置10を大きくして、深層筋活性化装置10を座板部60として利用する構成としてもよい。
【0026】
この深層筋活性化装置10は、図1に矢印で示すように、座面に垂直方向に振動する。よって、上半身が略鉛直方向となるように座っている人体20に対して、正中線方向に振動を加えることになる。
【0027】
また、上半身が略鉛直方向となるように座っている場合、坐骨31の下端は表皮の近傍に位置している状態であり、坐骨31が表皮近傍骨に相当することになる。この図1において、深層筋活性化装置10が振動すると、その振動は、坐骨31を振動させる。坐骨31は骨盤30を構成する骨の一つであり、坐骨31が振動することにより骨盤30の全体が振動する。さらに、骨盤30は腰椎40とつながっている。また、図1では上腕骨により隠れてしまっているが、腰椎40は胸椎とつながっている。
【0028】
よって、坐骨31の近傍表皮を深層筋活性化装置10により振動させることで、坐骨31→骨盤30の全体→腰椎40→胸椎と、振動が伝達される。腰椎40や胸椎は、胸半棘筋などの深層筋の極近傍に位置する深層筋近傍骨であり、これら腰椎40や胸椎が振動することにより、その近傍に位置する深層筋が受動的に振動させられることになる。これにより、深層筋を活性化させることができる。
【0029】
図2は、深層筋活性化装置10の概略構成を示す図である。図2に示すように、深層筋活性化装置10は、振動体12、電力増幅部14、振動制御部16を備える。これらが図示しない中空平板状の筐体内に収容されており、振動体12はその振動により筐体を振動させる。
【0030】
振動体12は、電気信号を機械的振動に変換する電気−振動変換機能を有している。たとえば、この振動体12としては、周知の種々の圧電体を用いることができる。また、所謂スピーカを用いることもできる。振動制御部16は、振動体12の振動周波数を指令する司令信号を生成して、電力増幅部14へ出力する。電力増幅部14は、司令信号を増幅し、その増幅した司令信号を振動体12へ入力する。これにより、振動体12は指令信号の周波数で振動する。
【0031】
このようにして振動体12が振動する際の周波数は、深層筋近傍骨の共振周波数のn次を含む周波数であることが好ましい。この共振周波数で振動体12が振動すれば、深層筋近傍骨は大きく振動することになるので、深層筋近傍骨の近傍に存在する深層筋も大きく振動させられ、深層筋が良好に活性化されるからである。
【0032】
よって、腰椎、胸椎の近傍の深層筋を活性化させる場合、この腰椎、胸椎の共振周波数で振動体12を振動させることが好ましい。なお、これら腰椎、胸椎の共振周波数は40Hz付近であることが既に知られている。ただし、人体は複雑な構造であり、腰椎、胸椎や、その近傍の深層筋も例外ではなく複雑な構造を有する。それ故、腰椎および胸椎を振動させようとする場合や、腰椎のみ、胸椎のみでも、ある程度の範囲を振動させようとする場合、その範囲の骨が有する共振周波数は、ある程度の周波数幅を持つことになる。そこで、振動体12を、振動させたい部位の共振周波数のn次共振周波数(nは自然数)を含む(好ましくはそのn次共振周波数を中心とする)ゆらぎをもった周波数で振動させる。
【0033】
また、単一の周波数の振動では、順応による効果低下やしびれも懸念されるが、ゆらぎを持った周波数で振動させることで、これら順応による効果低下やしびれも抑制できる。
【0034】
図3には、このようにゆらぎを持った周波数で振動体12を振動させる場合の司令信号を例示している。図3の例では、ある共振周波数ω0を中心とする周波数f1〜f2までの幅を持った司令信号が示されている。この司令信号が出力されることにより、振動体12も、この図3の周波数分布を持った周波数で振動する。
【0035】
次に、振動させたい部位の共振周波数を調べる方法の一例を図4を用いて説明する。図4では、人体20の種々の部位に振動センサ50が取り付けられている。具体的には、振動センサ50aは頭頂部に取り付けられており、振動センサ50bは頚椎近傍の表皮に取り付けられており、振動センサ50cは胸椎近傍の表皮に取り付けられており、振動センサ50dは胸骨近傍の表皮に取り付けられており、振動センサ50eは腰椎近傍の表皮に取り付けられ、振動センサ50fは上腕骨の上端近傍の表皮に取り付けられており、振動センサ50gは前腕骨の先端近傍の表皮に取り付けられている。
【0036】
このようにして振動センサ50を取り付けた状態で、深層筋活性化装置10(或いはその他の振動発生装置でもよい)により同定用振動を発生させる。この同定用振動としては、たとえば、M系列(擬似乱数)の振動を同定用振動として発生させる。そして、この同定用振動を発生させた状態で振動センサ50により振動を検出する。
【0037】
このようにすると、図5に示すように、同定用振動が、伝達関数G(s)により変化した値が、振動センサ50からの出力信号と考えることができる。よって、同定用振動とセンサ出力値とを用いて、同定用振動が入力された部位から振動センサ50が取り付けられた部位までの伝達特性を決定することができる。図5の中央に示すグラフがこの伝達特性を概念的に示す図であり、この伝達特性においてピークとなっているのが、伝達経路が有する共振周波数ω0である。
【0038】
たとえば、振動センサ50aのセンサ出力値と同定用振動とにより、坐骨31から頭頂部までの振動の伝達特性が得られ、振動センサ50bのセンサ出力値と同定用振動とにより、坐骨31から頚椎までの振動の伝達特性が得られる。また、このように振動の伝達特性を実測する場合、得られる伝達特性は、前述のゆらぎも反映された伝達特性が得られる。
【0039】
なお、一つの振動センサ50のセンサ出力値のみを用いて、共振させようとする部位の共振周波数を決定してもよいが、複数の振動センサ50のセンサ出力結果を用いて、共振させようとする部位の共振周波数を決定するようにしてもよい。また、共振させようとする部位の共振周波数が既に知られている場合には、既に知られているその値を用いてもよい。
【0040】
次に、共振させようとする部位の共振周波数を決定した後、その共振周波数を実際に発生させる構成を設計する方法の一例を説明する。図6に示したのは、振動制御部16の具体的構成であり、白色雑音信号生成部162と、IIRフィルタ回路164を備える。これらにより、共振させようとする部位の共振周波数を中心とするゆらぎを持った司令信号を生成し、その指令信号を電力増幅部14へ出力する。
【0041】
白色雑音信号生成部162は、目的とする司令信号の最低周波数(図3のf1)から最高周波数(図3のf2)までの白色雑音信号を生成して、IIRフィルタ回路164に入力する。IIRフィルタ回路164は、この白色雑音信号を波形整形して図3に例示したようなゆらぎを持った司令信号を生成する。
【0042】
白色雑音から所望の司令信号を生成するには、IIRフィルタ回路164のフィードバックフィルタ係数A、フィードフォワードフィルタ係数Bを適切な値に予め決定しておく必要がある。これら係数A、Bの決定方法としては、たとえば、IIRフィルタにおける周知の係数決定手法である直接法を用いる。このようにして予め係数A、Bを決定しておいたIIRフィルタ回路164に、f1からf2までの周波数幅を持つ白色雑音信号が入力されると、IIRフィルタ回路164から、図3に例示したような、振動させようとする部位の共振周波数を中心としたゆらぎを持った所望の司令信号を生成することができる。
【0043】
この司令信号が電力増幅部14により増幅されて振動体12に入力されることにより、振動体12は、振動させようとする部位の共振周波数を中心とするゆらぎを持った周波数で振動する。そして、その振動が、表皮近傍骨(図1では坐骨31)から深層筋近傍骨に伝達されて、その深層筋近傍骨が振動する。この振動により、深層筋が受動的に振動させられることにより、深層筋が活性化するのである。
【0044】
これまでの説明では、表皮近傍骨として坐骨31を例示していたが、この表皮近傍骨は、表皮の近傍に位置する骨であればよい。たとえば、骨盤を構成する坐骨以外の骨(腸骨など)や、踵骨などが表皮近傍骨である。そして、人体の表皮のうち、その表皮の振動により、前述した骨に振動が伝達される表皮が骨近傍表皮である。表皮を手で触り、骨の存在を確認できる場合、その部位は骨近傍表皮に該当し、存在を確認できた骨は、表皮近傍骨である。
【0045】
なお、骨盤は表皮近傍骨であることは前述したが、骨盤の全てが表皮の近傍に存在しているわけではない。たとえば、骨盤のうちでも、大殿筋が表皮との間に介在している部分(一般的に臀部と言われる部分)は、大殿筋が分厚い筋肉であるため、表皮近傍骨ではない。換言すれば、骨盤との間に大殿筋が介在している表皮は、骨近傍表皮ではない。この部分に振動を与えても、表層筋である大殿筋により振動が大きく減衰してしまい、深層筋に振動を伝達することができない。
【0046】
表皮を手で触って骨の存在を確認できる部位はであれば、骨近傍表皮であることは前述したが、表皮を手で触って骨の存在を確認できる部位は、人体には多数存在する。ただし、多数存在する骨近傍表皮のうちでも、この骨近傍表皮に対応する表皮近傍骨が大きな骨である表皮に振動を与えることが好ましい。骨を媒体として振動を深層筋まで伝達するには、骨近傍表皮を大きな振動強度で振動させることが好ましく、大きな骨であるほど大きな振動強度で振動させることが容易だからである。この条件を満たす表皮近傍骨としては、たとえば、骨盤を構成する骨、踵骨、頭蓋骨がある。これらの骨に振動を伝達できる表皮が骨近傍表皮であるが、踵骨に対しては、その下面(特に下面であって踵骨後部)の近傍の表皮を振動させることが好ましい。
【0047】
振動体12は、上記骨近傍表皮を振動させるものであり、振動体12の外形形状は、種々の形状が可能である。たとえば、図1の例では、振動体12により振動させられる筐体は平板形状となっていた。このように、単に板状となっていても良いし、また、上記近傍表皮の湾曲形状と嵌り合う形状となっていてもよい。
【0048】
また、前述の実施形態では、振動の周波数帯の中心が共振周波数ω0である振動を与えていたが、必ずしも、共振周波数ω0が振動の周波数帯の中心である必要はなく、共振周波数ω0を含む周波数帯の振動であればよい。また、共振周波数ω0そのものではなく、その周波数のn次の周波数を含む振動としてもよい。
【0049】
また、振動の周波数をゆらぎを持った周波数とする場合、そのゆらぎは、前述のように実測して決定してもよいし、それ以外に、ガウス分布のゆらぎや1/fゆらぎなど、ゆらぎの具体的周波数分布は種々変更してもよい。
【符号の説明】
【0050】
10 深層筋活性化装置 12 振動体 14 電力増幅部 16 振動制御部 20 人体 30 骨盤 31 坐骨 40 腰椎 50 振動センサ 60 座板部 162 白色信号生成部 164 IIRフィルタ回路
【特許請求の範囲】
【請求項1】
人体の表皮のうち、その表皮の近傍に位置する表皮近傍骨に振動が伝達される表皮である骨近傍表皮を振動可能な振動体を備え、
その振動体が、活性化させようとする深層筋の近傍に位置する骨である深層筋近傍骨のn次共振周波数(nは自然数)を含む周波数で振動することを特徴とする深層筋活性化装置。
【請求項2】
請求項1において、
前記振動体は、前記深層筋近傍骨としての脊椎部の骨のn次共振周波数を含む周波数で振動することを特徴とする深層筋活性化装置。
【請求項3】
請求項1または2において、
前記振動体が、前記n次共振周波数を含むゆらぎを有する周波数で振動することを特徴とする深層筋活性化装置。
【請求項4】
請求項3において、
前記n次共振周波数を含む所定周波数幅の白色雑音信号を生成する白色雑音信号生成部を備え、
前記白色雑音信号生成部が生成した白色雑音信号を、前記n次共振周波数を中心周波数とするインパルス応答回路に通すことにより前記振動体への司令信号を生成することを特徴とする深層筋活性化装置。
【請求項5】
人体の表皮のうち、その表皮の近傍に位置する表皮近傍骨に振動が伝達される表皮である骨近傍表皮を、振動体により振動させることにより前記表皮近傍骨を振動させ、
この表皮近傍骨の振動が、前記人体の骨により伝達されて、深層筋の近傍に位置する深層筋近傍骨が振動し、
深層筋近傍骨の振動により深層筋が振動させられることで、この深層筋を活性化させることを特徴とする深層筋活性化方法。
【請求項6】
請求項5において、
前記表皮近傍骨が骨盤を構成する骨であり、前記振動体により振動させる骨近傍表皮が、骨盤を構成する骨の近傍の表皮であることを特徴とする深層筋活性化方法。
【請求項7】
請求項6において、
前記表皮近傍骨が、骨盤を構成する骨のうちの坐骨であり、前記振動体により振動させる骨近傍表皮が、坐骨の下端部の近傍の表皮であることを特徴とする深層筋活性化方法。
【請求項8】
請求項5において、
前記表皮近傍骨が踵骨であり、前記振動体により振動させる骨近傍表皮が、踵骨の下面の近傍の表皮であることを特徴とする深層筋活性化方法。
【請求項9】
請求項5〜8のいずれか1項において、
前記振動体により、前記骨近傍表皮を、活性化させようとする深層筋の近傍に位置する骨のn次共振周波数を含む周波数で振動させることを特徴とする深層筋活性化方法。
【請求項10】
請求項9において、
前記振動体により、前記骨近傍表皮を、前記n次共振周波数を含むゆらぎを有する周波数で振動させることを特徴とする深層筋活性化方法。
【請求項1】
人体の表皮のうち、その表皮の近傍に位置する表皮近傍骨に振動が伝達される表皮である骨近傍表皮を振動可能な振動体を備え、
その振動体が、活性化させようとする深層筋の近傍に位置する骨である深層筋近傍骨のn次共振周波数(nは自然数)を含む周波数で振動することを特徴とする深層筋活性化装置。
【請求項2】
請求項1において、
前記振動体は、前記深層筋近傍骨としての脊椎部の骨のn次共振周波数を含む周波数で振動することを特徴とする深層筋活性化装置。
【請求項3】
請求項1または2において、
前記振動体が、前記n次共振周波数を含むゆらぎを有する周波数で振動することを特徴とする深層筋活性化装置。
【請求項4】
請求項3において、
前記n次共振周波数を含む所定周波数幅の白色雑音信号を生成する白色雑音信号生成部を備え、
前記白色雑音信号生成部が生成した白色雑音信号を、前記n次共振周波数を中心周波数とするインパルス応答回路に通すことにより前記振動体への司令信号を生成することを特徴とする深層筋活性化装置。
【請求項5】
人体の表皮のうち、その表皮の近傍に位置する表皮近傍骨に振動が伝達される表皮である骨近傍表皮を、振動体により振動させることにより前記表皮近傍骨を振動させ、
この表皮近傍骨の振動が、前記人体の骨により伝達されて、深層筋の近傍に位置する深層筋近傍骨が振動し、
深層筋近傍骨の振動により深層筋が振動させられることで、この深層筋を活性化させることを特徴とする深層筋活性化方法。
【請求項6】
請求項5において、
前記表皮近傍骨が骨盤を構成する骨であり、前記振動体により振動させる骨近傍表皮が、骨盤を構成する骨の近傍の表皮であることを特徴とする深層筋活性化方法。
【請求項7】
請求項6において、
前記表皮近傍骨が、骨盤を構成する骨のうちの坐骨であり、前記振動体により振動させる骨近傍表皮が、坐骨の下端部の近傍の表皮であることを特徴とする深層筋活性化方法。
【請求項8】
請求項5において、
前記表皮近傍骨が踵骨であり、前記振動体により振動させる骨近傍表皮が、踵骨の下面の近傍の表皮であることを特徴とする深層筋活性化方法。
【請求項9】
請求項5〜8のいずれか1項において、
前記振動体により、前記骨近傍表皮を、活性化させようとする深層筋の近傍に位置する骨のn次共振周波数を含む周波数で振動させることを特徴とする深層筋活性化方法。
【請求項10】
請求項9において、
前記振動体により、前記骨近傍表皮を、前記n次共振周波数を含むゆらぎを有する周波数で振動させることを特徴とする深層筋活性化方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−81619(P2013−81619A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−223532(P2011−223532)
【出願日】平成23年10月10日(2011.10.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月10日(2011.10.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]