
清掃ロボットシステム及びその制御方法
【課題】 太陽光発電及び太陽熱発電システムで使用される太陽電池パネルや反射鏡などの板状部材を、作業性が高く、かつ経済的に清掃するための清掃ロボットシステム及びその制御方法を提供する。
【解決手段】 太陽光発電用パネル又は太陽熱発電用反射鏡の平面状あるいは曲面状の板状部材4a、4bを清掃する清掃ロボットシステム1であって、清掃の対象となる前記板状部材4上を走行する機能と清掃する機能を有した多数の清掃ロボット2と、前記清掃ロボット2を第1の板状部材4aから第2の板状部材4bへ移動させる搬送機能を有しているアレンジロボット3とを備えており、前記清掃ロボット2が、前記板状部材4に吸着しながら清掃を行うための吸着機構を有しており、多数の前記清掃ロボット2と、前記清掃ロボット2よりも少ない数の前記アレンジロボット3が協働して、太陽光発電又は太陽熱発電プラントに設置された板状部材4を清掃する。
【解決手段】 太陽光発電用パネル又は太陽熱発電用反射鏡の平面状あるいは曲面状の板状部材4a、4bを清掃する清掃ロボットシステム1であって、清掃の対象となる前記板状部材4上を走行する機能と清掃する機能を有した多数の清掃ロボット2と、前記清掃ロボット2を第1の板状部材4aから第2の板状部材4bへ移動させる搬送機能を有しているアレンジロボット3とを備えており、前記清掃ロボット2が、前記板状部材4に吸着しながら清掃を行うための吸着機構を有しており、多数の前記清掃ロボット2と、前記清掃ロボット2よりも少ない数の前記アレンジロボット3が協働して、太陽光発電又は太陽熱発電プラントに設置された板状部材4を清掃する。
【発明の詳細な説明】
【技術分野】
【0001】
サービスロボットあるいは、フィールドロボットのうち、ガラス面等を清掃するロボットシステムに関するものである。特に、太陽光発電のソーラーパネルと呼ばれる発電素子や、太陽熱発電に使われる反射鏡などを清掃する清掃ロボットシステムに関するものである。
【背景技術】
【0002】
近年、数十万KWにも及ぶ大規模な太陽光(太陽電池等)あるいは太陽熱(太陽光集光システム等)発電システムの普及が進みつつある状況である。例えば、太陽光を集光して発電を行なう太陽熱発電システムは、太陽光を反射鏡であるヘリオスタットによりシステム中央部の上方に反射し、この反射光をセンターリフレクタと呼ばれる大型反射鏡で下方に設置されたキャビティーレシーバー(受熱部)に集光するビームダウン式太陽熱発電システムが知られている(特許文献1参照)。
【0003】
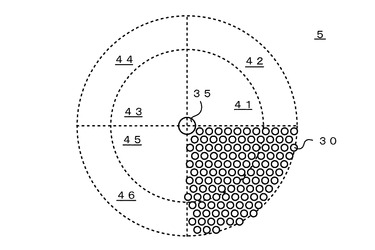
図3にビームダウン式太陽熱発電プラント5の平面概略図を示す。反射鏡である複数のヘリオスタット30がそれぞれ太陽を追尾しながら、その反射光を第2の反射鏡であるセンターリフレクタ35に集光し、センターリフレクタ35に集光された反射光を、受熱部を循環している溶融塩等の熱媒に集光して加熱する。この加熱された熱媒の熱エネルギーを蒸気タービン等により電気エネルギーに変換する発電システムが前記太陽熱発電システムの1例である。
【0004】
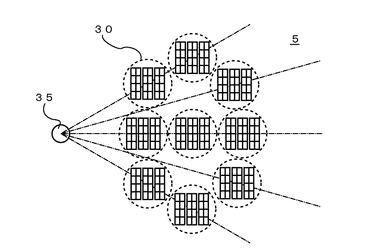
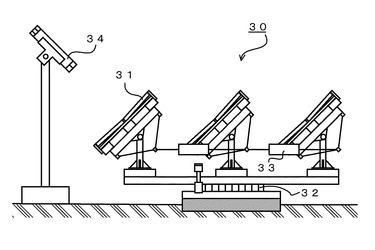
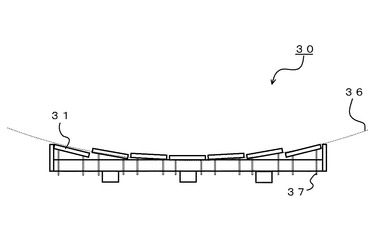
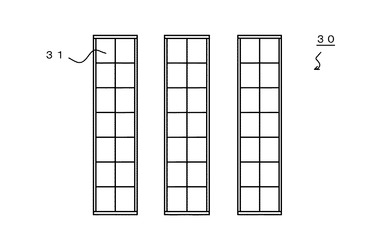
図4は、前記ヘリオスタット30の側面図を示しており、ヘリオスタット30は、小反射鏡であるファセット31を複数枚組み合わせて構成されており、図4では3基のヘリオスタット30を共通の回転機構32に設置し、傾動機構33で連結しており、太陽光追尾センサ34の信号により、太陽を自動追尾するよう構成されている。前記ヘリオスタット30は集光効率向上を目的として、図5に示す断面図のように、前記ファセット31が回転円錐面である擬似曲面36を形成するように、ファセット調整ボルト37によりファセット31の角度を調整するように構成されている。図6は、前記ヘリオスタット30の上面図であり、複数のファセット31により反射鏡を形成している。
【0005】
ここで使用されている反射鏡であるヘリオスタットや、太陽光発電システムのパネル等が塵埃や鳥の糞等によって汚れ、発電効率が減少する問題は指摘されているが、その対策はまだ確立されていない。現状としては、人手によって清掃作業を行う方式が取られているが、重労働であり、高所作業となって足場の設置が必要となる場合もあり、作業効率の低下とコストアップを招く。また、作業性の悪さから、反射鏡やパネル等のガラス面を傷つける危険性もある。今後、発電システムの更なる大規模化が進むと、機能的及び経済的に問題が大きくなっていく傾向がある。太陽光及び太陽熱発電システムは中東などの砂漠地域に設置されることが多いため、砂塵によりパネルや反射鏡が汚れやすく、また、気温が高いために人手による作業が困難になる場合もある。
【0006】
つまり、人手によるこれらの清掃作業は、作業者の安全面の問題と、作業対象であるパネルや鏡のガラス面を傷つける危険性の問題を有しており、また発電システムの規模が大きくなると清掃コストは比例して大きくなってしまい、スケール効果を得られないという問題を有している。太陽光や太陽熱発電システムそのものは、大規模なほどスケール効果が得られ、あるいは量産効果によって、発電コストが抑制できるため、大規模な発電システムほど相対的に清掃作業にかかるメンテナンスコストの占める割合は大きくなる。
【0007】
一方で、ロボットにより清掃作業を行うことも考えられる。本願の出願人は、ビルの窓や水族館のガラスを清掃するロボットに関する出願を過去に行っており、回転ブラシと遠隔操作による清掃システムを、前記発電システムに拡大適用することも考えた(特許文献2参照)。
【0008】
しかし、発電システムの規模が拡大し、清掃作業の頻度や絶対量が増加してくると、ロボットを設置するための初期コストがロボットの大型化等で増加し、また、ロボットの消費エネルギーや人手による遠隔操作のために運転コストが増加し、経済性が悪化するため現状での適用は困難である可能性が高い。
【0009】
つまり、前記発電システムの規模が大きくなり、太陽電池パネルや反射鏡のユニットサイズが大きくなると(6m×12mなどの太陽電池パネルも出現している)、これらを清掃するための単一型のロボットのサイズは大きくなり、例えば門型クレーンのような大型かつ大重量の機械(ロボット)になってしまい、このロボットの価格(初期コスト)も当然高くなるという問題を有している。パネルや反射鏡の清掃作業そのものは、ガラス面を清掃するだけであり、前述したロボットに大きな出力は必要ないが、ロボット自身の自重を支えて動かすための動力(運転コスト)が無視できないほど大きくなってくる。これは非効率であり、経済性を損なう。また、遠隔操作のための人手も必要となり、清掃作業者の労働環境が改善されるだけで、経済性は改善されない。
【0010】
また、個々の太陽光発電及び太陽熱発電システムの、パネルや反射鏡のサイズ等の仕様にあわせて、個別にロボットを設計製作することになり、これもこのロボットの価格が高くなる原因となる。
【特許文献1】特許2951297号
【特許文献2】特開平08−256953号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
本発明は、上記の問題を解決するためになされたものであり、その目的は、太陽光発電及び太陽熱発電システムで使用される太陽電池パネルや反射鏡などの板状部材を、作業性が高く、かつ経済的に清掃するための清掃ロボットシステム及びその制御方法を提供することにある。
【課題を解決するための手段】
【0012】
上記の目的を達成するための本発明に係る清掃ロボットシステムは、太陽光発電用パネル又は太陽熱発電用反射鏡の平面状あるいは曲面状の板状部材を清掃する清掃ロボットシステムであって、清掃の対象となる前記板状部材上を走行する機能と清掃する機能を有した多数の清掃ロボットと、前記清掃ロボットを第1の板状部材から第2の板状部材へ移動させる搬送機能を有しているアレンジロボットとを備えており、前記清掃ロボットが、前記板状部材に吸着しながら清掃を行うための吸着機構を有しており、多数の前記清掃ロボットと、前記清掃ロボットよりも少ない数の前記アレンジロボットが協働して、太陽光発電又は太陽熱発電プラントに設置された板状部材を清掃することを特徴とする。
【0013】
この構成により、前記清掃ロボットの小型化、及び低コスト化を実現することができる。つまり、前記清掃ロボットシステムは2種類の自律型ロボットに作業を分担させており、前記清掃ロボットは、パネル面或いは反射鏡面である板状部材の清掃と、その面内で移動を自動で行い、前記アレンジロボットは、前記清掃ロボットを清掃作業の終わった第1の板状部材から別の第2の板状部材へ移動させることと、複数の清掃ロボットの作業状況の監視、把握と、中央管理センターと通信を行い、作業状況を報告し、作業指示を受ける等の作業を自動で行うよう構成している。
【0014】
前記中央管理センターでは運転員が、アレンジロボット(大規模システムではこれも複数になることがある)からの状況報告を受け、必要に応じて作業指示を出し、また、ロボットでは対処しきれない事態が発生した場合は、前記運転員が現場に行って必要な作業を行う構成としている。
【0015】
すなわち、前記清掃ロボットの前記板状部材間の移動は、前記アレンジロボットにより行うため、清掃ロボットは、清掃機能及び板状部材上を移動する機能のみを有していればよく、地表面より高い位置に設置された板状部材間を移動するための機能を除くことで、小型化、低コスト化を実現することができる。このため、特に発電プラントの規模が大きくなり、必要となる清掃のためのロボットの数が多くなるほど、本発明の清掃ロボットを採用することによるコストメリットを得ることができる。
【0016】
また、太陽光発電用パネル及び太陽熱発電用反射鏡の板状部材は、発電効率を上げるために、太陽の動きを追尾する機能を有している場合が多く、ほとんどの場合は地表面に対して傾斜角を有した状態、つまり傾いた状態で運用されている。そのため、前記清掃ロボットに吸着機構を付加したことで、発電を行なっている日中であっても、清掃ロボットを使用することができる。
【0017】
さらに、太陽光発電用反射鏡で曲面状になっている板状部材もあり、この様な板状部材であっても、吸着機構を備えている清掃ロボットであれば、吸着させながら清掃を行うことができる。
【0018】
加えて、前記板状部材が発電状態にない夜間であっても、清掃のために板状部材を水平に移動させる手間がないため、清掃作業の作業効率を向上させることができる。なお、本発明の清掃ロボットシステムでは、2種類以上の自立型ロボットにより構成することができるため、更に、ロボットの行う作業を分割し、ロボットの種類を増やすこともできる。
【0019】
上記の清掃ロボットシステムにおいて、前記吸着機構が、前記清掃ロボットと前記板状部材の間に負圧を発生させて、前記板状部材に吸着する真空吸着機構であることを特徴とする。この構成により、前記吸着機構を簡易な構造としながら、確実な吸着を実現することができる。
【0020】
上記の清掃ロボットシステムにおいて、前記アレンジロボットが、前記清掃ロボットに板状部材の清掃のための水及び洗浄液と、移動及び清掃のためのエネルギーを供給するための補給設備機能を有していることを特徴とする。
【0021】
この構成により、清掃ロボットの小型化及び価格(初期コスト)を低下させることができる。つまり、前記アレンジロボットに、清掃ロボットを移動させる機能に加えて、前記板状部材の清掃のために必要となる、例えば水や洗浄液等の補給や動力となる電気を充電したりする補給設備機能を設置することにより、前記清掃ロボットの更なる小型化が実現できる。特に大規模の発電プラントで使用する場合には、大量の水や洗浄液等が必要となるが、前記アレンジロボットに補給設備があれば、前記清掃ロボットは、少なくとも1つの板状部材を清掃する水や動力を有していればよいため、小型化を進めることができる。
【0022】
上記の清掃ロボットシステムにおいて、前記アレンジロボット1台と複数の前記清掃ロボットからなるグループと、複数の前記グループを管理するマネジメントロボット1台と複数の前記グループからなる集団とを有し、前記集団により、前記太陽光発電又は太陽熱発電プラント内の予め定めた作業領域の板状部材の清掃を行うことを特徴とする。
【0023】
この構成により、前記アレンジロボットは複数台の清掃ロボットを管理し、前記マネジメントロボットは複数台のアレンジロボットを管理することで、システム全体を有機的に運用することができ、多大なスケールメリットを得ることができる。つまり、広大な太陽光発電又は太陽熱発電のプラントにおいて、多数の作業領域を区分し、この作業領域に複数の前記グループを割り当て、清掃作業を行い、清掃作業の進度又は、板状部材の汚れ度合いにより、前記グループを他の未作業の作業領域に移動させる判断を前記マネジメントロボットが行うことで、清掃の作業効率を向上させることができる。
【0024】
特に、ビームダウン式太陽熱発電プラントの場合には、反射鏡であるヘリオスタットの向きが前記作業領域によりことなるため、例えば風等の影響で砂が付着する場合には、ヘリオスタットの向きにより汚れ度合いがことなるため、優先的かつ効率的に清掃作業を行うためには、前記グループを割り当てる前記作業領域の選定が重要となり、すなわちマネジメントロボットの存在が重要となる。
【0025】
なお、前記マネジメントロボット及びアレンジロボットの変わりに作業員が介入して、又はこの清掃ロボットシステムの一部として作業することもできる。つまり、例えば、アレンジロボットの走行路面の一部が破壊等され、走行が困難となった場合、その領域の清掃ロボットの移動は、作業員により行うことができ、また、反射鏡の点検等の作業が行われており、その領域を避けて清掃を行う場合に、マネジメントロボットの変わりに人間が判断して、前記グループの移動先の領域を選定することもできる。
【0026】
上記の目的を達成するための本発明に係る清掃ロボットシステムの制御方法は、前記アレンジロボット1台と複数の前記清掃ロボットによりグループを編成し、複数の前記グループにより、清掃を行う際の清掃ロボットシステムの制御方法において、複数の前記グループが、複数の前記作業領域のうちから割り当てられた作業領域で、それぞれ清掃作業を行い、さらに、前記グループは、割り当てられた作業領域における清掃作業が終了したときに、次の作業領域の指示を受ける第1の制御と、前記アレンジロボットが、前記作業領域内で、かつ、割り当てられた板状部材の清掃を完了した清掃ロボットを、清掃未完了の板状部材に移動させる第2の制御を行うことを特徴とする。この構成により、前述した清掃ロボットシステムと同様の作用効果を得ることができる。
【0027】
上記の清掃ロボットシステムの制御方法において、前記グループの前記作業領域を移動させる場合に、前記第1の制御と前記第2の制御を同時に行うことを特徴とする。
【0028】
この構成により、アレンジロボットを制御するための第1の制御と、アレンジロボットが清掃ロボットを制御するための第2の制御の2段階で制御を行うことができる。これにより、第1の制御と第2の制御を同時平行で行う必要が発生した場合に、作業領域の移動指示を受けたアレンジロボットは、板状部材の清掃を完了した清掃ロボットを、次の作業領域の板状部材に順次移動させる制御として行うことができる。
【0029】
この制御により、作業領域内の板状部材の清掃を全て終了したのちに、清掃ロボットを移動させる場合に比べて、作業領域の変更を短時間かつ効率的に行うことができる。つまり、上記の制御は、第1の作業領域の清掃作業が全て完了した後に、第2の作業領域にグループを移動させる方法と比べて、第1の作業領域と第2の作業領域で清掃作業を行う移行期間が存在するため、ほとんどの清掃ロボットが休むことなく清掃作業を続けている状態が多くなる。そのため、清掃作業全体の作業効率を向上させることができる。
【0030】
上記の清掃ロボットシステムの制御方法において、前記第1の制御を、マネジメントロボットで行う制御方法であって、前記マネジメントロボットが複数の前記アレンジロボットに、前記作業領域の割り当てを指示することを特徴とする。
【0031】
この構成により、太陽光発電又は太陽熱発電プラントの大規模化が進んだ場合でも、効率的に清掃作業を進めることができる。つまり、清掃作業自体は、基本的にロボットが中心になって行い、作業員はその監視及び緊急時の対応のみを行えばよいため、清掃作業の作業性及び経済性を向上させることができる。
【発明の効果】
【0032】
本発明に係る清掃ロボットシステム及びその制御方法によれば、太陽光発電及び太陽熱発電システムで使用される太陽電池パネルや反射鏡(ヘリオスタット)などの板状部材を、前記板状部材の清掃と面内の移動機能を有した清掃ロボットと、前記清掃ロボットを第1の板状部材から異なる第2の板状部材に移動させるための機能を有するアレンジロボットの少なくとも2種類のロボットにより清掃させる清掃ロボットシステム及びその制御方法とすることで、清掃作業の作業性が向上し、かつ経済性を向上させることができる。
【発明を実施するための最良の形態】
【0033】
以下、本発明に係る実施の形態の清掃ロボットシステム及びその制御方法について、図面を参照しながら説明する。図1に、本発明に係る実施の形態の清掃ロボットシステムの構成を示す。
【0034】
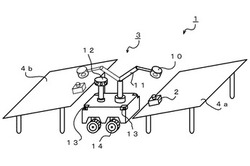
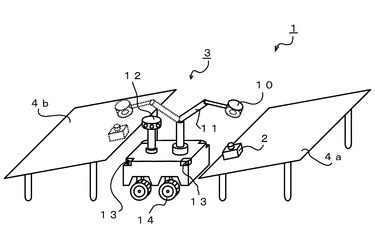
この清掃ロボットシステム1は、清掃対象である例えば、太陽光発電用パネル又は太陽熱発電用反射鏡等の板状部材4a、4bを清掃するための清掃ロボット2と、前記清掃ロボット2を第1の板状部材4aから第2の板状部材4bに移動させるためのアレンジロボット3からなる。前記清掃ロボット2は、例えば、洗浄用の水や洗浄液等を噴射する装置や、回転ブラシ等で板状部材4の表面を清掃する清掃機能を有しており、かつ、板状部材4の面内を移動するための移動機能を有している。
【0035】
アレンジロボット3は、前記清掃ロボット2を第1の板状部材4aから第2の板状部材4bに移動させるための把持アダプタ10をロボットアーム11の先端に有している。この把持アダプタ10により、前記清掃ロボット2を把持し、他の板状部材4に移動させることができる。また、発電プラント等で本発明の清掃ロボットシステムを運用する際には、多数の前記清掃ロボット2と、前記清掃ロボット2よりも少ない数のアレンジロボット3を使用するため、前記アレンジロボット3は発電プラント内の板状部材4の間を走りながら作業を行うため、走行輪14と、ロボット本体の四隅に3Dレーザスキャナ等の周囲物体との距離測定手段を有している。ここで、走行輪14はクローラ(無限軌道)あるいは移動脚でもよい。さらに、傾斜、回転及び伸縮等が可能な全方位可動カメラ12を有している。
【0036】
前記板状部材4は、例えば、太陽光発電用パネル(太陽電池等)であって、横10m、奥行き10、高さは1mから8mとなるようなサイズがあり、前記清掃ロボット2にパネル(板状部材)間を移動するための構造を付加すると大型化が避けられない問題が発生する。そこで、本発明では、板状部材4の清掃を行うための清掃ロボット2と、前記清掃ロボット2を、清掃終了後に、次の異なる板状部材4に移動させるためのアレンジロボット3に機能を分割した。この機能分担によって、清掃ロボット2及びアレンジロボット3のそれぞれが必要最小限のサイズ、重量、パワーで、必要十分な性能を実現できる。
【0037】
すなわち、清掃ロボット2は比較的小型軽量で、基本的に必要な清掃作業と、かつ必要な作業効率を維持する移動速度を持つような、清掃作業に専念特化したロボットとすることができる。前記清掃ロボット2は、他の板状部材4に移ることはできないが、この動作をアレンジロボット3に委ねることにより、無駄の無い最適設計をすることができる。また、アレンジロボット3は、細かい清掃作業を前記清掃ロボット2に任せることによって
、移送や、作業管理、通信連絡といった上位の機能に専念できる。
【0038】
また、前記アレンジロボット3に水や洗浄液等のタンクを搭載して、前記清掃ロボット2を把持アダプタ10で把持して移動させる際に、前記把持アダプタ10を介して前記清掃ロボットに備えた補給口に、水や洗浄液を補給する構成とすることができる。同様に、清掃ロボットの移動及び清掃のための電力等のエネルギーを供給する構成とすることができる。
【0039】
この構成により、前記清掃ロボット2に搭載する水や洗浄液等のタンクは、最低限、1枚の板状部材4を清掃するために必要な量あればよいため、前記清掃ロボット2のさらなる小型化を実現することができる。また、清掃ロボットにエネルギー供給をする機会が多くなるため、例えば、エネルギー源が電力である場合は、清掃ロボットのバッテリーを小型化することができ、化石燃料である場合は、燃料タンクを小型化することができる。
【0040】
ここで、水等の補給は把持アダプタ10を使用せずに、例えば、アレンジロボット3の内部や上面に、前記清掃ロボット2を格納するドックを設け、前記ドックに水や洗浄液等の補給、及び充電等の補給設備を併設してもよい。
【0041】
また、アレンジロボットは、清掃ロボットの予備品を携行し、水、洗浄液、充電等の補給を行う代わりに、清掃ロボット全体を取り替える方式としてもよい。この場合、アレンジロボットは、次の清掃ロボットを取替え、移送を行うまでの時間を利用して、回収した清掃ロボットに水、洗浄液の補給と充電を行う。これによって作業全体の時間短縮を図ることができる。
【0042】
図2は、ビームダウン式太陽熱発電プラント5の平面図を示しており、センターリフレクタ35を中心に多数のヘリオスタット30を配置している。ここで、ヘリオスタット30は前記発電プラント5の一部にのみ図示されているが、通常は前記リフレクタ35を中心に、濃淡はあるものの、360度すべてにヘリオスタット30を設置している。また、清掃ロボットシステム1の制御上、前記発電プラント5を8つの作業領域に分割して示している(第1作業領域41、第2作業領域42、第3作業領域43等)。
【0043】
本発明の清掃ロボットシステム1は、前記アレンジロボット1台と、前記清掃ロボット複数台(例えば5〜20台)で1つのグループを形成し、少なくとも1つのグループが前記発電プラント5内で清掃作業を行う構成としている。前記アレンジロボットは、管理センターの運転員による遠隔操作とすることもできるが、小規模な発電プラントの場合はともかく、板状部材が数万枚、前記アレンジロボットが10台以上、前記清掃ロボットが100台以上といった大規模なシステムになると、前記アレンジロボット3は自立的に作業を行うことが必要となってくる。
【0044】
すなわち、清掃ロボット2を監視或いは無線通信を受けて前記発電プラントの作業状況を把握し、第1の板状部材4aの清掃作業が終わったら、その清掃ロボット2を把持して次の第2の板状部材4bに移動させる。前記清掃ロボット2を新しい板状部材4に移したときに、前記清掃ロボット2を板状部材4に確実に吸着させるために、清掃ロボットに規定の力を加えて前記板状部材4に押し付ける場合もある。
【0045】
また、定期的に清掃ロボット2の充電や、水や洗浄液の補充も必要である。これらの作業のためには、前記清掃ロボット2の位置と姿勢、板状部材4の位置、地面の状況など、周囲の一切の環境を認識して作業計画を立て、実行する必要がある。これは基本的に知能ロボットあるいは自律ロボットといわれるものの機能であり、環境認識、判断、動作制御、外部通信などの要素技術が必要であるが、現在のロボット技術はこのような機能を実現
できる状況にあり、知能ロボットとしてのアレンジロボット3を実現することができる。
【0046】
図2に示す8つの作業領域に対して、例えば、1台のアレンジロボット3と15台の清掃ロボット2からなるグループを形成し、前記グループを2組と、それを統括する1台のマネジメントロボットから構成する清掃ロボットシステムの制御方法の実施例に関して説明する。前記マネジメントロボットは、中央管理センターで運転員が行っていたアレンジロボット3の統括を代わって行うものであり、清掃ロボットシステムの大規模化及び自動化に貢献するものである。
【0047】
第1グループを第1作業領域41に、第2グループを第2作業領域42に配置して、清掃作業を開始する。各グループのアレンジロボット3は、それぞれの作業領域内で清掃作業の完了した清掃ロボット2を次の板状部材4へ移動させていく。このとき、作業領域内におけるアレンジロボット3の移動距離が最も少なくなるように制御することで、1台あたりのアレンジロボット3が統括可能とする清掃ロボット2の数を増やすことができる。
【0048】
指定された作業領域内の板状部材4の清掃が全て完了する以前に、アレンジロボット3は前記マネジメントロボットと通信を行い、次に移動すべき作業領域の指定を受けるようにする。そして、それぞれの清掃ロボット2が作業を完了する予定時刻の間隔が大きい場合には、現在、把持している清掃ロボット2を次の作業領域まで移動させることを開始していく。つまり、グループ内の清掃ロボット2が異なる作業領域で清掃作業を行っている作業領域移行状態が存在することになる。この判断をアレンジロボット3又はマネジメントロボットが行い、作業領域の移行を実行する。
【0049】
また、マネジメントロボットは、統括している複数の前記アレンジロボットの移動距離の合計が最も少なくなるように、移動先の作業領域を決定していく。特に、太陽熱発電プラントの場合は、作業領域によってヘリオスタットの台数が異なる場合がある。つまり、センターリフレクタ35の北側であって、前記センターリフレクタ35の影になるような場所には、ヘリオスタット35の設置台数を少なくする場合である。
【0050】
さらに、発電プラントの規模が拡大し、作業領域の数が多くなる場合は、1台のマネジメントロボットが複数のグループを統括するように構成することもできる。前記マネジメントロボットは中央管理センターに設置されたコンピュータ又は、発電プラント内を移動可能とするロボットとすることができる。
【図面の簡単な説明】
【0051】
【図1】本発明に係る実施の形態の清掃ロボットシステムの構成を示す概略図である。
【図2】ビームダウン式太陽熱発電システムの平面図である。
【図3】ビームダウン式太陽熱発電システムの平面図である。
【図4】ヘリオスタットの側面図である。
【図5】ヘリオスタットにおけるファセットの状態を示した概略図である。
【図6】ヘリオスタットのファセットの配列を示した概略図である。
【符号の説明】
【0052】
1 清掃ロボットシステム
2 清掃ロボット
3 アレンジロボット
4a 第1の板状部材
4b 第2の板状部材
5 ビームダウン式太陽熱発電プラント
【技術分野】
【0001】
サービスロボットあるいは、フィールドロボットのうち、ガラス面等を清掃するロボットシステムに関するものである。特に、太陽光発電のソーラーパネルと呼ばれる発電素子や、太陽熱発電に使われる反射鏡などを清掃する清掃ロボットシステムに関するものである。
【背景技術】
【0002】
近年、数十万KWにも及ぶ大規模な太陽光(太陽電池等)あるいは太陽熱(太陽光集光システム等)発電システムの普及が進みつつある状況である。例えば、太陽光を集光して発電を行なう太陽熱発電システムは、太陽光を反射鏡であるヘリオスタットによりシステム中央部の上方に反射し、この反射光をセンターリフレクタと呼ばれる大型反射鏡で下方に設置されたキャビティーレシーバー(受熱部)に集光するビームダウン式太陽熱発電システムが知られている(特許文献1参照)。
【0003】
図3にビームダウン式太陽熱発電プラント5の平面概略図を示す。反射鏡である複数のヘリオスタット30がそれぞれ太陽を追尾しながら、その反射光を第2の反射鏡であるセンターリフレクタ35に集光し、センターリフレクタ35に集光された反射光を、受熱部を循環している溶融塩等の熱媒に集光して加熱する。この加熱された熱媒の熱エネルギーを蒸気タービン等により電気エネルギーに変換する発電システムが前記太陽熱発電システムの1例である。
【0004】
図4は、前記ヘリオスタット30の側面図を示しており、ヘリオスタット30は、小反射鏡であるファセット31を複数枚組み合わせて構成されており、図4では3基のヘリオスタット30を共通の回転機構32に設置し、傾動機構33で連結しており、太陽光追尾センサ34の信号により、太陽を自動追尾するよう構成されている。前記ヘリオスタット30は集光効率向上を目的として、図5に示す断面図のように、前記ファセット31が回転円錐面である擬似曲面36を形成するように、ファセット調整ボルト37によりファセット31の角度を調整するように構成されている。図6は、前記ヘリオスタット30の上面図であり、複数のファセット31により反射鏡を形成している。
【0005】
ここで使用されている反射鏡であるヘリオスタットや、太陽光発電システムのパネル等が塵埃や鳥の糞等によって汚れ、発電効率が減少する問題は指摘されているが、その対策はまだ確立されていない。現状としては、人手によって清掃作業を行う方式が取られているが、重労働であり、高所作業となって足場の設置が必要となる場合もあり、作業効率の低下とコストアップを招く。また、作業性の悪さから、反射鏡やパネル等のガラス面を傷つける危険性もある。今後、発電システムの更なる大規模化が進むと、機能的及び経済的に問題が大きくなっていく傾向がある。太陽光及び太陽熱発電システムは中東などの砂漠地域に設置されることが多いため、砂塵によりパネルや反射鏡が汚れやすく、また、気温が高いために人手による作業が困難になる場合もある。
【0006】
つまり、人手によるこれらの清掃作業は、作業者の安全面の問題と、作業対象であるパネルや鏡のガラス面を傷つける危険性の問題を有しており、また発電システムの規模が大きくなると清掃コストは比例して大きくなってしまい、スケール効果を得られないという問題を有している。太陽光や太陽熱発電システムそのものは、大規模なほどスケール効果が得られ、あるいは量産効果によって、発電コストが抑制できるため、大規模な発電システムほど相対的に清掃作業にかかるメンテナンスコストの占める割合は大きくなる。
【0007】
一方で、ロボットにより清掃作業を行うことも考えられる。本願の出願人は、ビルの窓や水族館のガラスを清掃するロボットに関する出願を過去に行っており、回転ブラシと遠隔操作による清掃システムを、前記発電システムに拡大適用することも考えた(特許文献2参照)。
【0008】
しかし、発電システムの規模が拡大し、清掃作業の頻度や絶対量が増加してくると、ロボットを設置するための初期コストがロボットの大型化等で増加し、また、ロボットの消費エネルギーや人手による遠隔操作のために運転コストが増加し、経済性が悪化するため現状での適用は困難である可能性が高い。
【0009】
つまり、前記発電システムの規模が大きくなり、太陽電池パネルや反射鏡のユニットサイズが大きくなると(6m×12mなどの太陽電池パネルも出現している)、これらを清掃するための単一型のロボットのサイズは大きくなり、例えば門型クレーンのような大型かつ大重量の機械(ロボット)になってしまい、このロボットの価格(初期コスト)も当然高くなるという問題を有している。パネルや反射鏡の清掃作業そのものは、ガラス面を清掃するだけであり、前述したロボットに大きな出力は必要ないが、ロボット自身の自重を支えて動かすための動力(運転コスト)が無視できないほど大きくなってくる。これは非効率であり、経済性を損なう。また、遠隔操作のための人手も必要となり、清掃作業者の労働環境が改善されるだけで、経済性は改善されない。
【0010】
また、個々の太陽光発電及び太陽熱発電システムの、パネルや反射鏡のサイズ等の仕様にあわせて、個別にロボットを設計製作することになり、これもこのロボットの価格が高くなる原因となる。
【特許文献1】特許2951297号
【特許文献2】特開平08−256953号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
本発明は、上記の問題を解決するためになされたものであり、その目的は、太陽光発電及び太陽熱発電システムで使用される太陽電池パネルや反射鏡などの板状部材を、作業性が高く、かつ経済的に清掃するための清掃ロボットシステム及びその制御方法を提供することにある。
【課題を解決するための手段】
【0012】
上記の目的を達成するための本発明に係る清掃ロボットシステムは、太陽光発電用パネル又は太陽熱発電用反射鏡の平面状あるいは曲面状の板状部材を清掃する清掃ロボットシステムであって、清掃の対象となる前記板状部材上を走行する機能と清掃する機能を有した多数の清掃ロボットと、前記清掃ロボットを第1の板状部材から第2の板状部材へ移動させる搬送機能を有しているアレンジロボットとを備えており、前記清掃ロボットが、前記板状部材に吸着しながら清掃を行うための吸着機構を有しており、多数の前記清掃ロボットと、前記清掃ロボットよりも少ない数の前記アレンジロボットが協働して、太陽光発電又は太陽熱発電プラントに設置された板状部材を清掃することを特徴とする。
【0013】
この構成により、前記清掃ロボットの小型化、及び低コスト化を実現することができる。つまり、前記清掃ロボットシステムは2種類の自律型ロボットに作業を分担させており、前記清掃ロボットは、パネル面或いは反射鏡面である板状部材の清掃と、その面内で移動を自動で行い、前記アレンジロボットは、前記清掃ロボットを清掃作業の終わった第1の板状部材から別の第2の板状部材へ移動させることと、複数の清掃ロボットの作業状況の監視、把握と、中央管理センターと通信を行い、作業状況を報告し、作業指示を受ける等の作業を自動で行うよう構成している。
【0014】
前記中央管理センターでは運転員が、アレンジロボット(大規模システムではこれも複数になることがある)からの状況報告を受け、必要に応じて作業指示を出し、また、ロボットでは対処しきれない事態が発生した場合は、前記運転員が現場に行って必要な作業を行う構成としている。
【0015】
すなわち、前記清掃ロボットの前記板状部材間の移動は、前記アレンジロボットにより行うため、清掃ロボットは、清掃機能及び板状部材上を移動する機能のみを有していればよく、地表面より高い位置に設置された板状部材間を移動するための機能を除くことで、小型化、低コスト化を実現することができる。このため、特に発電プラントの規模が大きくなり、必要となる清掃のためのロボットの数が多くなるほど、本発明の清掃ロボットを採用することによるコストメリットを得ることができる。
【0016】
また、太陽光発電用パネル及び太陽熱発電用反射鏡の板状部材は、発電効率を上げるために、太陽の動きを追尾する機能を有している場合が多く、ほとんどの場合は地表面に対して傾斜角を有した状態、つまり傾いた状態で運用されている。そのため、前記清掃ロボットに吸着機構を付加したことで、発電を行なっている日中であっても、清掃ロボットを使用することができる。
【0017】
さらに、太陽光発電用反射鏡で曲面状になっている板状部材もあり、この様な板状部材であっても、吸着機構を備えている清掃ロボットであれば、吸着させながら清掃を行うことができる。
【0018】
加えて、前記板状部材が発電状態にない夜間であっても、清掃のために板状部材を水平に移動させる手間がないため、清掃作業の作業効率を向上させることができる。なお、本発明の清掃ロボットシステムでは、2種類以上の自立型ロボットにより構成することができるため、更に、ロボットの行う作業を分割し、ロボットの種類を増やすこともできる。
【0019】
上記の清掃ロボットシステムにおいて、前記吸着機構が、前記清掃ロボットと前記板状部材の間に負圧を発生させて、前記板状部材に吸着する真空吸着機構であることを特徴とする。この構成により、前記吸着機構を簡易な構造としながら、確実な吸着を実現することができる。
【0020】
上記の清掃ロボットシステムにおいて、前記アレンジロボットが、前記清掃ロボットに板状部材の清掃のための水及び洗浄液と、移動及び清掃のためのエネルギーを供給するための補給設備機能を有していることを特徴とする。
【0021】
この構成により、清掃ロボットの小型化及び価格(初期コスト)を低下させることができる。つまり、前記アレンジロボットに、清掃ロボットを移動させる機能に加えて、前記板状部材の清掃のために必要となる、例えば水や洗浄液等の補給や動力となる電気を充電したりする補給設備機能を設置することにより、前記清掃ロボットの更なる小型化が実現できる。特に大規模の発電プラントで使用する場合には、大量の水や洗浄液等が必要となるが、前記アレンジロボットに補給設備があれば、前記清掃ロボットは、少なくとも1つの板状部材を清掃する水や動力を有していればよいため、小型化を進めることができる。
【0022】
上記の清掃ロボットシステムにおいて、前記アレンジロボット1台と複数の前記清掃ロボットからなるグループと、複数の前記グループを管理するマネジメントロボット1台と複数の前記グループからなる集団とを有し、前記集団により、前記太陽光発電又は太陽熱発電プラント内の予め定めた作業領域の板状部材の清掃を行うことを特徴とする。
【0023】
この構成により、前記アレンジロボットは複数台の清掃ロボットを管理し、前記マネジメントロボットは複数台のアレンジロボットを管理することで、システム全体を有機的に運用することができ、多大なスケールメリットを得ることができる。つまり、広大な太陽光発電又は太陽熱発電のプラントにおいて、多数の作業領域を区分し、この作業領域に複数の前記グループを割り当て、清掃作業を行い、清掃作業の進度又は、板状部材の汚れ度合いにより、前記グループを他の未作業の作業領域に移動させる判断を前記マネジメントロボットが行うことで、清掃の作業効率を向上させることができる。
【0024】
特に、ビームダウン式太陽熱発電プラントの場合には、反射鏡であるヘリオスタットの向きが前記作業領域によりことなるため、例えば風等の影響で砂が付着する場合には、ヘリオスタットの向きにより汚れ度合いがことなるため、優先的かつ効率的に清掃作業を行うためには、前記グループを割り当てる前記作業領域の選定が重要となり、すなわちマネジメントロボットの存在が重要となる。
【0025】
なお、前記マネジメントロボット及びアレンジロボットの変わりに作業員が介入して、又はこの清掃ロボットシステムの一部として作業することもできる。つまり、例えば、アレンジロボットの走行路面の一部が破壊等され、走行が困難となった場合、その領域の清掃ロボットの移動は、作業員により行うことができ、また、反射鏡の点検等の作業が行われており、その領域を避けて清掃を行う場合に、マネジメントロボットの変わりに人間が判断して、前記グループの移動先の領域を選定することもできる。
【0026】
上記の目的を達成するための本発明に係る清掃ロボットシステムの制御方法は、前記アレンジロボット1台と複数の前記清掃ロボットによりグループを編成し、複数の前記グループにより、清掃を行う際の清掃ロボットシステムの制御方法において、複数の前記グループが、複数の前記作業領域のうちから割り当てられた作業領域で、それぞれ清掃作業を行い、さらに、前記グループは、割り当てられた作業領域における清掃作業が終了したときに、次の作業領域の指示を受ける第1の制御と、前記アレンジロボットが、前記作業領域内で、かつ、割り当てられた板状部材の清掃を完了した清掃ロボットを、清掃未完了の板状部材に移動させる第2の制御を行うことを特徴とする。この構成により、前述した清掃ロボットシステムと同様の作用効果を得ることができる。
【0027】
上記の清掃ロボットシステムの制御方法において、前記グループの前記作業領域を移動させる場合に、前記第1の制御と前記第2の制御を同時に行うことを特徴とする。
【0028】
この構成により、アレンジロボットを制御するための第1の制御と、アレンジロボットが清掃ロボットを制御するための第2の制御の2段階で制御を行うことができる。これにより、第1の制御と第2の制御を同時平行で行う必要が発生した場合に、作業領域の移動指示を受けたアレンジロボットは、板状部材の清掃を完了した清掃ロボットを、次の作業領域の板状部材に順次移動させる制御として行うことができる。
【0029】
この制御により、作業領域内の板状部材の清掃を全て終了したのちに、清掃ロボットを移動させる場合に比べて、作業領域の変更を短時間かつ効率的に行うことができる。つまり、上記の制御は、第1の作業領域の清掃作業が全て完了した後に、第2の作業領域にグループを移動させる方法と比べて、第1の作業領域と第2の作業領域で清掃作業を行う移行期間が存在するため、ほとんどの清掃ロボットが休むことなく清掃作業を続けている状態が多くなる。そのため、清掃作業全体の作業効率を向上させることができる。
【0030】
上記の清掃ロボットシステムの制御方法において、前記第1の制御を、マネジメントロボットで行う制御方法であって、前記マネジメントロボットが複数の前記アレンジロボットに、前記作業領域の割り当てを指示することを特徴とする。
【0031】
この構成により、太陽光発電又は太陽熱発電プラントの大規模化が進んだ場合でも、効率的に清掃作業を進めることができる。つまり、清掃作業自体は、基本的にロボットが中心になって行い、作業員はその監視及び緊急時の対応のみを行えばよいため、清掃作業の作業性及び経済性を向上させることができる。
【発明の効果】
【0032】
本発明に係る清掃ロボットシステム及びその制御方法によれば、太陽光発電及び太陽熱発電システムで使用される太陽電池パネルや反射鏡(ヘリオスタット)などの板状部材を、前記板状部材の清掃と面内の移動機能を有した清掃ロボットと、前記清掃ロボットを第1の板状部材から異なる第2の板状部材に移動させるための機能を有するアレンジロボットの少なくとも2種類のロボットにより清掃させる清掃ロボットシステム及びその制御方法とすることで、清掃作業の作業性が向上し、かつ経済性を向上させることができる。
【発明を実施するための最良の形態】
【0033】
以下、本発明に係る実施の形態の清掃ロボットシステム及びその制御方法について、図面を参照しながら説明する。図1に、本発明に係る実施の形態の清掃ロボットシステムの構成を示す。
【0034】
この清掃ロボットシステム1は、清掃対象である例えば、太陽光発電用パネル又は太陽熱発電用反射鏡等の板状部材4a、4bを清掃するための清掃ロボット2と、前記清掃ロボット2を第1の板状部材4aから第2の板状部材4bに移動させるためのアレンジロボット3からなる。前記清掃ロボット2は、例えば、洗浄用の水や洗浄液等を噴射する装置や、回転ブラシ等で板状部材4の表面を清掃する清掃機能を有しており、かつ、板状部材4の面内を移動するための移動機能を有している。
【0035】
アレンジロボット3は、前記清掃ロボット2を第1の板状部材4aから第2の板状部材4bに移動させるための把持アダプタ10をロボットアーム11の先端に有している。この把持アダプタ10により、前記清掃ロボット2を把持し、他の板状部材4に移動させることができる。また、発電プラント等で本発明の清掃ロボットシステムを運用する際には、多数の前記清掃ロボット2と、前記清掃ロボット2よりも少ない数のアレンジロボット3を使用するため、前記アレンジロボット3は発電プラント内の板状部材4の間を走りながら作業を行うため、走行輪14と、ロボット本体の四隅に3Dレーザスキャナ等の周囲物体との距離測定手段を有している。ここで、走行輪14はクローラ(無限軌道)あるいは移動脚でもよい。さらに、傾斜、回転及び伸縮等が可能な全方位可動カメラ12を有している。
【0036】
前記板状部材4は、例えば、太陽光発電用パネル(太陽電池等)であって、横10m、奥行き10、高さは1mから8mとなるようなサイズがあり、前記清掃ロボット2にパネル(板状部材)間を移動するための構造を付加すると大型化が避けられない問題が発生する。そこで、本発明では、板状部材4の清掃を行うための清掃ロボット2と、前記清掃ロボット2を、清掃終了後に、次の異なる板状部材4に移動させるためのアレンジロボット3に機能を分割した。この機能分担によって、清掃ロボット2及びアレンジロボット3のそれぞれが必要最小限のサイズ、重量、パワーで、必要十分な性能を実現できる。
【0037】
すなわち、清掃ロボット2は比較的小型軽量で、基本的に必要な清掃作業と、かつ必要な作業効率を維持する移動速度を持つような、清掃作業に専念特化したロボットとすることができる。前記清掃ロボット2は、他の板状部材4に移ることはできないが、この動作をアレンジロボット3に委ねることにより、無駄の無い最適設計をすることができる。また、アレンジロボット3は、細かい清掃作業を前記清掃ロボット2に任せることによって
、移送や、作業管理、通信連絡といった上位の機能に専念できる。
【0038】
また、前記アレンジロボット3に水や洗浄液等のタンクを搭載して、前記清掃ロボット2を把持アダプタ10で把持して移動させる際に、前記把持アダプタ10を介して前記清掃ロボットに備えた補給口に、水や洗浄液を補給する構成とすることができる。同様に、清掃ロボットの移動及び清掃のための電力等のエネルギーを供給する構成とすることができる。
【0039】
この構成により、前記清掃ロボット2に搭載する水や洗浄液等のタンクは、最低限、1枚の板状部材4を清掃するために必要な量あればよいため、前記清掃ロボット2のさらなる小型化を実現することができる。また、清掃ロボットにエネルギー供給をする機会が多くなるため、例えば、エネルギー源が電力である場合は、清掃ロボットのバッテリーを小型化することができ、化石燃料である場合は、燃料タンクを小型化することができる。
【0040】
ここで、水等の補給は把持アダプタ10を使用せずに、例えば、アレンジロボット3の内部や上面に、前記清掃ロボット2を格納するドックを設け、前記ドックに水や洗浄液等の補給、及び充電等の補給設備を併設してもよい。
【0041】
また、アレンジロボットは、清掃ロボットの予備品を携行し、水、洗浄液、充電等の補給を行う代わりに、清掃ロボット全体を取り替える方式としてもよい。この場合、アレンジロボットは、次の清掃ロボットを取替え、移送を行うまでの時間を利用して、回収した清掃ロボットに水、洗浄液の補給と充電を行う。これによって作業全体の時間短縮を図ることができる。
【0042】
図2は、ビームダウン式太陽熱発電プラント5の平面図を示しており、センターリフレクタ35を中心に多数のヘリオスタット30を配置している。ここで、ヘリオスタット30は前記発電プラント5の一部にのみ図示されているが、通常は前記リフレクタ35を中心に、濃淡はあるものの、360度すべてにヘリオスタット30を設置している。また、清掃ロボットシステム1の制御上、前記発電プラント5を8つの作業領域に分割して示している(第1作業領域41、第2作業領域42、第3作業領域43等)。
【0043】
本発明の清掃ロボットシステム1は、前記アレンジロボット1台と、前記清掃ロボット複数台(例えば5〜20台)で1つのグループを形成し、少なくとも1つのグループが前記発電プラント5内で清掃作業を行う構成としている。前記アレンジロボットは、管理センターの運転員による遠隔操作とすることもできるが、小規模な発電プラントの場合はともかく、板状部材が数万枚、前記アレンジロボットが10台以上、前記清掃ロボットが100台以上といった大規模なシステムになると、前記アレンジロボット3は自立的に作業を行うことが必要となってくる。
【0044】
すなわち、清掃ロボット2を監視或いは無線通信を受けて前記発電プラントの作業状況を把握し、第1の板状部材4aの清掃作業が終わったら、その清掃ロボット2を把持して次の第2の板状部材4bに移動させる。前記清掃ロボット2を新しい板状部材4に移したときに、前記清掃ロボット2を板状部材4に確実に吸着させるために、清掃ロボットに規定の力を加えて前記板状部材4に押し付ける場合もある。
【0045】
また、定期的に清掃ロボット2の充電や、水や洗浄液の補充も必要である。これらの作業のためには、前記清掃ロボット2の位置と姿勢、板状部材4の位置、地面の状況など、周囲の一切の環境を認識して作業計画を立て、実行する必要がある。これは基本的に知能ロボットあるいは自律ロボットといわれるものの機能であり、環境認識、判断、動作制御、外部通信などの要素技術が必要であるが、現在のロボット技術はこのような機能を実現
できる状況にあり、知能ロボットとしてのアレンジロボット3を実現することができる。
【0046】
図2に示す8つの作業領域に対して、例えば、1台のアレンジロボット3と15台の清掃ロボット2からなるグループを形成し、前記グループを2組と、それを統括する1台のマネジメントロボットから構成する清掃ロボットシステムの制御方法の実施例に関して説明する。前記マネジメントロボットは、中央管理センターで運転員が行っていたアレンジロボット3の統括を代わって行うものであり、清掃ロボットシステムの大規模化及び自動化に貢献するものである。
【0047】
第1グループを第1作業領域41に、第2グループを第2作業領域42に配置して、清掃作業を開始する。各グループのアレンジロボット3は、それぞれの作業領域内で清掃作業の完了した清掃ロボット2を次の板状部材4へ移動させていく。このとき、作業領域内におけるアレンジロボット3の移動距離が最も少なくなるように制御することで、1台あたりのアレンジロボット3が統括可能とする清掃ロボット2の数を増やすことができる。
【0048】
指定された作業領域内の板状部材4の清掃が全て完了する以前に、アレンジロボット3は前記マネジメントロボットと通信を行い、次に移動すべき作業領域の指定を受けるようにする。そして、それぞれの清掃ロボット2が作業を完了する予定時刻の間隔が大きい場合には、現在、把持している清掃ロボット2を次の作業領域まで移動させることを開始していく。つまり、グループ内の清掃ロボット2が異なる作業領域で清掃作業を行っている作業領域移行状態が存在することになる。この判断をアレンジロボット3又はマネジメントロボットが行い、作業領域の移行を実行する。
【0049】
また、マネジメントロボットは、統括している複数の前記アレンジロボットの移動距離の合計が最も少なくなるように、移動先の作業領域を決定していく。特に、太陽熱発電プラントの場合は、作業領域によってヘリオスタットの台数が異なる場合がある。つまり、センターリフレクタ35の北側であって、前記センターリフレクタ35の影になるような場所には、ヘリオスタット35の設置台数を少なくする場合である。
【0050】
さらに、発電プラントの規模が拡大し、作業領域の数が多くなる場合は、1台のマネジメントロボットが複数のグループを統括するように構成することもできる。前記マネジメントロボットは中央管理センターに設置されたコンピュータ又は、発電プラント内を移動可能とするロボットとすることができる。
【図面の簡単な説明】
【0051】
【図1】本発明に係る実施の形態の清掃ロボットシステムの構成を示す概略図である。
【図2】ビームダウン式太陽熱発電システムの平面図である。
【図3】ビームダウン式太陽熱発電システムの平面図である。
【図4】ヘリオスタットの側面図である。
【図5】ヘリオスタットにおけるファセットの状態を示した概略図である。
【図6】ヘリオスタットのファセットの配列を示した概略図である。
【符号の説明】
【0052】
1 清掃ロボットシステム
2 清掃ロボット
3 アレンジロボット
4a 第1の板状部材
4b 第2の板状部材
5 ビームダウン式太陽熱発電プラント
【特許請求の範囲】
【請求項1】
太陽光発電用パネル又は太陽熱発電用反射鏡の平面状あるいは曲面状の板状部材を清掃する清掃ロボットシステムであって、清掃の対象となる前記板状部材上を走行する機能と清掃する機能を有した多数の清掃ロボットと、前記清掃ロボットを第1の板状部材から第2の板状部材へ移動させる搬送機能を有しているアレンジロボットとを備えており、
前記清掃ロボットが、前記板状部材に吸着しながら清掃を行うための吸着機構を有しており、多数の前記清掃ロボットと、前記清掃ロボットよりも少ない数の前記アレンジロボットが協働して、太陽光発電又は太陽熱発電プラントに設置された板状部材を清掃することを特徴とする清掃ロボットシステム。
【請求項2】
前記吸着機構が、前記清掃ロボットと前記板状部材の間に負圧を発生させて、前記板状部材に吸着する真空吸着機構であることを特徴とする請求項1に記載の清掃ロボットシステム。
【請求項3】
前記アレンジロボットが、前記清掃ロボットに板状部材の清掃のための水及び洗浄液と、移動及び清掃のためのエネルギーを供給するための補給設備機能を有していることを特徴とする請求項1又は2に記載の清掃ロボットシステム。
【請求項4】
前記アレンジロボット1台と複数の前記清掃ロボットからなるグループと、複数の前記グループを管理するマネジメントロボット1台と複数の前記グループからなる集団とを有し、前記集団により、前記太陽光発電又は太陽熱発電プラント内の予め定めた作業領域の板状部材の清掃を行うことを特徴とする請求項1乃至3のいずれか1つに記載の清掃ロボットシステム。
【請求項5】
前記アレンジロボット1台と複数の前記清掃ロボットによりグループを編成し、複数の前記グループにより、清掃を行う際の清掃ロボットシステムの制御方法において、
複数の前記グループが、複数の前記作業領域のうちから割り当てられた作業領域で、それぞれ清掃作業を行い、さらに、前記グループは、割り当てられた作業領域における清掃作業が終了したときに、次の作業領域の指示を受ける第1の制御と、前記アレンジロボットが、前記作業領域内で、かつ、割り当てられた板状部材の清掃を完了した清掃ロボットを、清掃未完了の板状部材に移動させる第2の制御を行うことを特徴とする清掃ロボットシステムの制御方法。
【請求項6】
前記グループの前記作業領域を移動させる場合に、前記第1の制御と前記第2の制御を同時に行うことを特徴とする請求項5に記載の清掃ロボットシステムの制御方法。
【請求項7】
前記第1の制御を、マネジメントロボットで行う制御方法であって、前記マネジメントロボットが複数の前記アレンジロボットに、前記作業領域の割り当てを指示することを特徴とする請求項5又は6に記載の清掃ロボットシステムの制御方法。
【請求項1】
太陽光発電用パネル又は太陽熱発電用反射鏡の平面状あるいは曲面状の板状部材を清掃する清掃ロボットシステムであって、清掃の対象となる前記板状部材上を走行する機能と清掃する機能を有した多数の清掃ロボットと、前記清掃ロボットを第1の板状部材から第2の板状部材へ移動させる搬送機能を有しているアレンジロボットとを備えており、
前記清掃ロボットが、前記板状部材に吸着しながら清掃を行うための吸着機構を有しており、多数の前記清掃ロボットと、前記清掃ロボットよりも少ない数の前記アレンジロボットが協働して、太陽光発電又は太陽熱発電プラントに設置された板状部材を清掃することを特徴とする清掃ロボットシステム。
【請求項2】
前記吸着機構が、前記清掃ロボットと前記板状部材の間に負圧を発生させて、前記板状部材に吸着する真空吸着機構であることを特徴とする請求項1に記載の清掃ロボットシステム。
【請求項3】
前記アレンジロボットが、前記清掃ロボットに板状部材の清掃のための水及び洗浄液と、移動及び清掃のためのエネルギーを供給するための補給設備機能を有していることを特徴とする請求項1又は2に記載の清掃ロボットシステム。
【請求項4】
前記アレンジロボット1台と複数の前記清掃ロボットからなるグループと、複数の前記グループを管理するマネジメントロボット1台と複数の前記グループからなる集団とを有し、前記集団により、前記太陽光発電又は太陽熱発電プラント内の予め定めた作業領域の板状部材の清掃を行うことを特徴とする請求項1乃至3のいずれか1つに記載の清掃ロボットシステム。
【請求項5】
前記アレンジロボット1台と複数の前記清掃ロボットによりグループを編成し、複数の前記グループにより、清掃を行う際の清掃ロボットシステムの制御方法において、
複数の前記グループが、複数の前記作業領域のうちから割り当てられた作業領域で、それぞれ清掃作業を行い、さらに、前記グループは、割り当てられた作業領域における清掃作業が終了したときに、次の作業領域の指示を受ける第1の制御と、前記アレンジロボットが、前記作業領域内で、かつ、割り当てられた板状部材の清掃を完了した清掃ロボットを、清掃未完了の板状部材に移動させる第2の制御を行うことを特徴とする清掃ロボットシステムの制御方法。
【請求項6】
前記グループの前記作業領域を移動させる場合に、前記第1の制御と前記第2の制御を同時に行うことを特徴とする請求項5に記載の清掃ロボットシステムの制御方法。
【請求項7】
前記第1の制御を、マネジメントロボットで行う制御方法であって、前記マネジメントロボットが複数の前記アレンジロボットに、前記作業領域の割り当てを指示することを特徴とする請求項5又は6に記載の清掃ロボットシステムの制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−155308(P2010−155308A)
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願番号】特願2008−335191(P2008−335191)
【出願日】平成20年12月26日(2008.12.26)
【特許番号】特許第4477685号(P4477685)
【特許公報発行日】平成22年6月9日(2010.6.9)
【出願人】(000005902)三井造船株式会社 (1,723)
【Fターム(参考)】
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願日】平成20年12月26日(2008.12.26)
【特許番号】特許第4477685号(P4477685)
【特許公報発行日】平成22年6月9日(2010.6.9)
【出願人】(000005902)三井造船株式会社 (1,723)
【Fターム(参考)】
[ Back to top ]