
渋滞予兆表示方法
【課題】渋滞予兆を的確におこなうと共にその予兆結果を運転者にとって見やすくわかりやすく表示して、運転者が渋滞の回避あるいは解消のための運転操作を迅速におこなうことが可能な渋滞予兆表示方法を提供する。
【解決手段】自車両の加速度を検出するステップと、検出した加速度の周波数分析から周波数に対応するパワースペクトルを算出するステップと、算出したパワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出するステップと、傾き極大値に応じて自車両前方での渋滞予兆度を算出するステップと、渋滞予兆度に応じた表示をおこなうステップとを含む。
【解決手段】自車両の加速度を検出するステップと、検出した加速度の周波数分析から周波数に対応するパワースペクトルを算出するステップと、算出したパワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出するステップと、傾き極大値に応じて自車両前方での渋滞予兆度を算出するステップと、渋滞予兆度に応じた表示をおこなうステップとを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、渋滞予兆表示方法に関し、より具体的には、自車両の加速度から渋滞予兆を判定しその渋滞予兆結果を表示する方法に関する。
【背景技術】
【0002】
従来から、車両用運転支援装置において渋滞予測方法が提案されている。例えば、特許文献1には、レーダ装置による検出結果から自車両の前方及び後方の所定距離内に存在する他車両の車両密度を算出し、その車両密度を用いて自車両の走行状態が渋滞の発生原因になり得るか否かを判定することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−262862号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1を含む従来の方法では、渋滞予測結果の表示が必ずしも運転者にとって見やすくわかりやすいものとは言えず、運転者が渋滞の回避あるいは解消のための運転操作を迅速におこなう上でさらなる改善の余地がある。
【0005】
したがって、本発明の目的は、渋滞予兆を的確におこなうと共にその予兆結果を運転者にとって見やすくわかりやすく表示して、運転者が渋滞の回避あるいは解消のための運転操作を迅速におこなうことが可能な渋滞予兆表示方法を提供することである。
【課題を解決するための手段】
【0006】
本発明は、自車両の加速度を検出するステップと、検出した加速度の周波数分析から周波数に対応するパワースペクトルを算出するステップと、算出したパワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出するステップと、傾き極大値に応じて自車両前方での渋滞予兆度を算出するステップと、渋滞予兆度に応じた表示をおこなうステップと、を含む渋滞予兆表示方法である。
【0007】
本発明によれば、渋滞予兆を視覚的に把握できるので、運転者が渋滞の回避あるいは解消のための運転操作へ迅速に移行することが可能となる。
【0008】
本発明の一形態によると、さらに、自車両と先行車両との車間距離を検出するステップを含み、表示をおこなうステップはその車間距離も同時に表示する。
【0009】
本発明の一形態によれば、渋滞予兆と共に先行車両との車間距離をも視覚的に把握できるので、運転者が車間距離を把握した上で渋滞の回避あるいは解消のための運転操作をとることが可能となる。
【0010】
本発明の一形態によると、表示をおこなうステップは、渋滞予兆が有る場合と無い場合とで表示形態を変化させる。
【0011】
本発明の一形態によれば、渋滞予兆の有無を即座に把握することができるので速やかに渋滞への進行を防ぐために適した運転操作へ移行することが可能となる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施例に従う、渋滞予兆表示方法を実施する装置の構成を示す図である。
【図2】本発明の一実施例に従う、加速度スペクトルを示す図である。
【図3】本発明の一実施例に従う、渋滞予兆度と傾き極大値との関係を説明するための図である。
【図4】本発明の一実施例に従う、表示器の配置例を示す図である。
【図5】本発明の一実施例に従う、表示器による表示例を示す図である。
【図6】本発明の一実施例に従う、渋滞予兆表示制御のフローチャートである。
【発明を実施するための形態】
【0013】
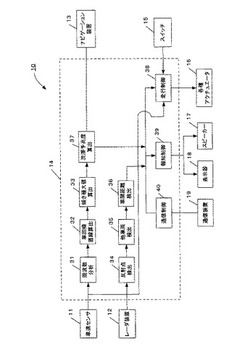
図面を参照しながら本発明の実施の形態を説明する。図1は、本発明の一実施形態に従う、渋滞予兆表示方法を実施する渋滞予兆表示装置10の構成を示す図である。渋滞予兆表示装置10は車両に搭載される。渋滞予兆表示装置10は、1つの装置としてあるいは他の装置の一部として車両に搭載することができる。
【0014】
渋滞予兆表示装置10は、車速センサ11、レーダ装置12、ナビゲーション装置13、処理装置14、スイッチ15、各種アクチュエータ16、スピーカー17、表示器18、および通信装置19を備える形で構成される。なお、処理装置14は、ナビゲーション装置13の中に組み込んでもよい。また、スピーカー17および表示器18は、ナビゲーション装置13が備える該当機能を利用してもよい。
【0015】
車速センサ11は、自車両の加速度を検出し、その検出信号を処理装置14へ送る。レーダ装置12は、自車両の周辺に設定される所定の検出対象領域を複数の角度領域に分割し、各角度領域を走査(スキャン)しながら赤外光レーザやミリ波等の電磁波を発信する。レーダ装置12は、検出対象領域における物体からの反射信号(電磁波)を受信し、その反射信号を処理装置14へ送る。
【0016】
ナビゲーション装置13は、GPS信号等の測位信号を受信して、その測位信号から自車両の現在位置を算出する。また、ナビゲーション装置13は、車速センサ11およびヨーレートセンサ(図示なし)等が検出した加速度およびヨーレートから自律航法を用いて自車両の現在位置を算出することもできる。ナビゲーション装置13は、地図データを備え、表示する地図上に自車両の現在位置、目的地までの経路情報や渋滞情報等を出力する機能を有する。
【0017】
処理装置14は、周波数分析部31、単回帰直線算出部32、傾き極大値算出部33、反射点検出部34、他車両検出部35、車間距離検出部36、渋滞予兆算出部37、走行制御部38、報知制御部39、および通信制御部40を備える。各ブロックの機能は、処理装置14が有するコンピュータ(CPU)によって実現される。各ブロックの機能の詳細は後述する。
【0018】
処理装置14は、ハードウエア構成として、例えば、入力アナログ信号をデジタル信号に変換するA/D変換回路、各種演算処理を行う中央演算処理装置(CPU)、CPUが演算に際してデータを記憶するのに使用するRAM、CPUが実行するプログラムおよび用いるデータ(テーブル、マップを含む)を記憶するROM、スピーカー17に対する駆動信号および表示器18に対する表示信号などを出力する出力回路を備えている。
【0019】
スイッチ15は、自車両の走行制御に係る各種信号を処理装置14へ出力する。各種信号には、例えばアクセルペダルの操作(位置)信号、自動走行制御(ACC)に係る各種信号(制御開始、制御停止、目標車速、車間距離等)などが含まれる。
【0020】
各種アクチュエータ16は、複数のアクチュエータの総称として用いており、例えばスロットルアクチュエータ、ブレーキアクチュエータ、ステアリングアクチュエータ等が含まれる。
【0021】
表示器18は、LCD等のディスプレイを含み、タッチパネル機能を有するディスプレイとすることができる。表示器18は、音声出力部および音声入力部を備える構成でもよい。表示器18は、報知制御部39からの制御信号に応じて、所定の警報情報を表示したり、所定の警告灯を点滅ないし点灯させることによって、運転者に報知する。スピーカー17は、報知制御部39からの制御信号に応じて所定の警報音や音声を出力することによって、運転者に報知する。
【0022】
通信装置19は、通信制御部40による制御下で、無線通信によって他車両あるいはサーバ装置(図示なし)や中継局(図示なし)と通信を行い、渋滞予兆算出37から出力される渋滞予兆算出結果と位置情報を対応付けて送信したり、他車両等から渋滞情報等を受信する。取得された情報は、通信制御部40を介して報知制御部39あるいは走行制御部38に送られる。
【0023】
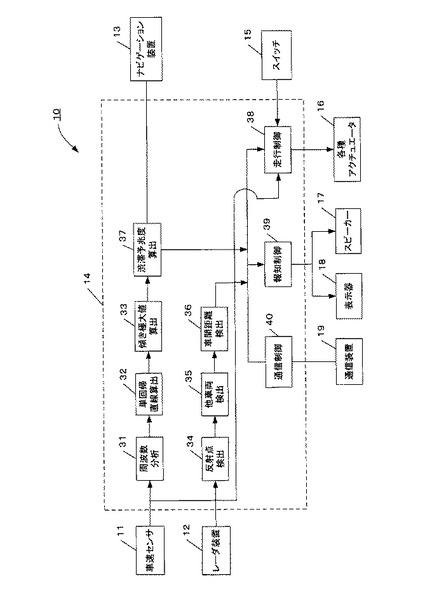
次に処理装置14の各ブロックの機能について説明する。周波数分析部31は、車速センサ11が検出した自車両の加速度について周波数分析を行い、パワースペクトルを算出する。図2に2つの異なる走行状態(a)、(b)におけるパワースペクトルの例を示す。図2では、パワースペクトルとして周波数に対応した加速度スペクトル51、53が例示されている。
【0024】
単回帰直線算出部32は、得られたパワースペクトルに対して単回帰分析をおこない単回帰直線を算出する。図2の例では、符号52、54で指示される直線がそれぞれ加速度スペクトル51、53に対して得られる単回帰直線である。
【0025】
傾き極大値算出部33は、得られた単回帰直線から傾き極大値を算出する。図2の例では、最初に単回帰直線52、54の傾きを算出する。すなわち、図2において、所定の周波数範囲Y(例えば、数秒から数分の時間範囲に対応する周波数範囲、0〜0.5Hz等)でのスペクトル値の変化Xに基づき傾きα(=Y/X)を算出する。図2では(a)と(b)での傾きα1、α2が得られる。
【0026】
次に、得られた傾きαの差分、すなわち所定の時間間隔での傾きαkとαk−1との差分Δα(=αk―αk−1)を算出する。得られた差分Δαの時間変化、あるいは差分Δαから得られるパラメータ(例えば、絶対値|Δα|、2乗値(Δα)2等)の時間変化の極大値を求める。得られた極大値を傾き極大値として処理装置14内のメモリ(RAM等)に格納する。
【0027】
反射点検出部34は、レーダ装置12が検出した反射信号から反射点(物体)の位置を検出する。他車両検出部35は、反射点検出部34から出力される反射点の位置情報に基づき、隣り合う反射点間の距離、反射点の分布状態等から自車両の周辺に存在する少なくとも1台以上の他車両を検出する。車間距離検出部36は、反射点検出部34が検出した他車両情報から自車両と他車両との間の車間距離を検出し、その結果を走行制御部38、報知制御部39、および通信制御部40へ出力する。
【0028】
渋滞予兆算出部37は、傾き極大値算出部33により算出された傾き極大値に応じて渋滞予兆度を算出する。ここで、渋滞予兆度は、自車両前方にける道路(車線)において渋滞に至る可能性を示すパラメータとして定義する。すなわち、渋滞予兆度は、渋滞となる可能性が高い場合に大きくなり、その可能性が低い場合に小さくなる。この渋滞予兆度を本発明では傾き極大値から算出する。
【0029】
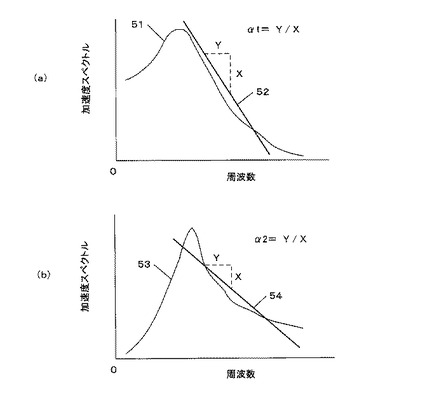
図3は、渋滞予兆度と傾き極大値との関係を説明するための図である。図3の直線56、57は、図2の直線52、54と同様に単回帰直線算出部32によって求められる単回帰直線である。単回帰直線56は傾きαが小さい場合の例であり、単回帰直線57は傾きαが大きい場合の例である。渋滞予兆度の大小を判定する閾値については、任意の値を定めることができるが、一般的に(1/f)ゆらぎ特性として知られている「−45度」をその値とすることができる。
【0030】
傾きαが小さい場合は、先行車両から受ける衝撃波(振動、ゆらぎ)が小さい場合に相当し、車間距離が短くなって車群が密になる、すなわち渋滞に至る可能性が大きい場合に相当する。この場合、渋滞予兆度は大きな値をとる。逆に傾きαが大きい場合は、先行車両から受ける衝撃波(振動、ゆらぎ)が大きい場合に相当し、車間距離が短くなりにくく車群が密になりにくい、すなわち渋滞に至る可能性が小さ場合に相当する。この場合、渋滞予兆度は小さな値をとる。なお、ここで言う衝撃波(振動、ゆらぎ)とは、各車両が加速および減速の動作を繰り返すことにより後方の車両にその動作(前後の動き)を一種の振動として伝播させることを意味する。図3の例では、単回帰直線56から単回帰直線57へ向かって傾きαが大きくなるにつれて、渋滞に至る可能性が低くなっていく、すなわち渋滞予兆度が小さくなっていく関係にある。
【0031】
したがって、本発明ではこの単回帰直線の傾きの大きさ、より具体的には、傾き極大値算出部33によって算出された傾き極大値(例えば、|Δα|、(Δα)2等の時間変化の極大値)に応じて渋滞予兆度を算出する。具体的には、例えば傾き極大値(x)と渋滞予兆度(y)との関係を示す関数(例えば、y=ax+b)を予め求めておき、傾き極大値算出部33によって算出された傾き極大値(x)に対する渋滞予兆度(y)を算出する。あるいは、傾き極大値と対応する渋滞予兆度の値との関係を予め作成してテーブルとしてメモリに格納しておき、算出された傾き極大値に対する渋滞予兆度をそのテーブルを参照して求めることもできる。
【0032】
渋滞予兆算出部37は、算出した渋滞予兆度を含む制御信号を走行制御部38、報知制御部39、および通信制御部40に送る。また、渋滞予兆算出部37は、渋滞予兆度をナビゲーション装置13に出力する。ナビゲーション装置13は、渋滞予兆算出部37から受信した渋滞予兆度と、通信制御部40から出力される他車両において予測された渋滞予測結果等とに基づき、渋滞を回避するように自車両の経路探索や経路誘導を行うことができる。
【0033】
走行制御部38は、渋滞予兆算出部37から出力される渋滞予兆度と通信制御部40から出力される他車両において予測された渋滞発生予測結果等と、スイッチ15から出力される各種信号と、車速センサ11から出力される自車両の加速度の検出結果と、車間距離検出部36から出力される車間距離の検出結果とに基づき、各種アクチュエータを制御することにより、自車両の走行を制御する。
【0034】
報知制御部43は、渋滞予兆算出部37から出力される渋滞予兆度と通信制御部40から出力される他車両において予測された渋滞発生予測結果等とに基づき、表示器18およびスピーカー17による報知制御をおこなう。報知制御部43は、例えば、「減速して車間距離を取ること」等をスピーカー17から音声で伝えたりするための制御信号を送る。
【0035】
図4は、本発明の一実施例に従う、車室内での表示器の配置例を示す図である。図4では、表示部63を、車室の中心線C上に位置するルームミラー62の下部に設置する場合と、フロントカバー部60の上に設置する場合を例示している。表示部63は、ナビゲーション装置13の表示部61の一部として組み込むあるいはその上部等に配置してもよい。なお、表示部63は、車室の中心付近に位置することが望ましい。その理由は、表示部63が車室の中心付近に位置することにより、運転者の視線方向が左右いずれに向かっていても、表示部63を運転者の視野内に入れることができるからである。
【0036】
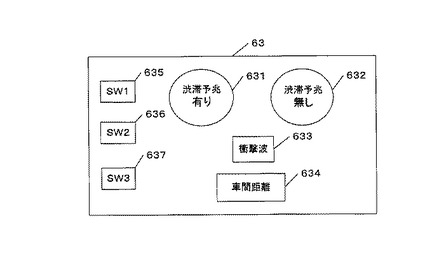
図5は、表示部63の表示例を示す図である。表示部63は、渋滞予兆の有無を表示する点灯部631、632を有する。点灯部631は、渋滞予兆度が所定値以下の場合、すなわち渋滞の可能性が低い場合に所定の色(例えば緑色)で点灯あるいは点滅する。点灯部632は、渋滞予兆度が所定値より大きい場合、すなわち渋滞の可能性が高い場合に所定の色(例えば赤色)で点灯あるいは点滅する。なお、図の点灯部631、632内の文字表示は説明のために記載されているもので実際には表示してもしなくてもよい。この渋滞予兆の有無の表示により、運転者は前方での渋滞の可能性を視覚的に把握することができ、減速して車間距離をとる等の渋滞回避のための運転に速やかに移行することが可能となる。
【0037】
表示ブロック633は、上述した衝撃波が所定の大きさ以上の場合に所定の色(例えば白色)で点灯する。衝撃波の大きさは、渋滞予兆算出部37において渋滞予兆度を算出する際に用いる傾き極大値の時間的変化(微分値)の大きさ等から算出することができる。例えば、その時間的変化が小さい場合には衝撃波は小さく、時間的変化が大きい場合には衝撃波は大きくなるので、所定のしきい値を設けて、そのしきい値を越えた場合に点灯部633を点灯させるようにする。なお、この衝撃波の有無の表示633は設けなくてもよく、適宜設定することができる。表示ブロック634には、車間距離検出部36から送られる車間距離(m)を表示する。
【0038】
表示ブロック635、636、637は、スイッチボタンであり、それぞれ、点灯部631、632の表示をオフさせるスイッチ、表示ブロック633の表示をオフさせるスイッチ、表示部63全体の表示をオフさせるスイッチである。運転者は各スイッチを押す(触れる)ことにより、手動で対応する表示機能を停止させることができる。
【0039】
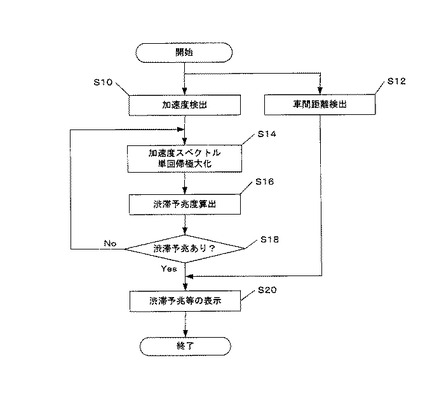
図6は、本発明の一実施例に従う、渋滞予兆表示制御のフローチャートである。なお、各ステップの詳細は既に説明した通りである。ステップS10において、車速センサ11によって自車両の加速度を検出する。並行して、ステップS12において、レーダ装置12からの出力信号に基づき自車両の周辺の車両との車間距離を検出する(図1のブロック34〜36)。
【0040】
ステップS14において、加速度スペクトル単回帰極大化をおこなう。具体的には、上述した傾き極大値を算出する(図1のブロック31〜33)。ステップS16において、渋滞予兆度を算出する(図1のブロック37)。ステップS18において、渋滞予兆の有無、すなわち渋滞予兆度が所定値より大きいか否かを判定する。この判定がYesの場合、次のステップS20において渋滞予兆の有無等の表示をおこなう。ステップS18の判定がNoの場合、ステップS14に戻り以降のフローを繰り返す。
【0041】
以上、本発明の実施の形態について説明したが、本発明はこのような実施形態に限定されることはなく、本発明の趣旨を逸脱しない範囲において改変して用いることができる。
【符号の説明】
【0042】
10 渋滞予兆表示装置
14 処理装置
51、53 加速度(パワー)スペクトル
52、54、56、57 単回帰直線
63 表示部
【技術分野】
【0001】
本発明は、渋滞予兆表示方法に関し、より具体的には、自車両の加速度から渋滞予兆を判定しその渋滞予兆結果を表示する方法に関する。
【背景技術】
【0002】
従来から、車両用運転支援装置において渋滞予測方法が提案されている。例えば、特許文献1には、レーダ装置による検出結果から自車両の前方及び後方の所定距離内に存在する他車両の車両密度を算出し、その車両密度を用いて自車両の走行状態が渋滞の発生原因になり得るか否かを判定することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−262862号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1を含む従来の方法では、渋滞予測結果の表示が必ずしも運転者にとって見やすくわかりやすいものとは言えず、運転者が渋滞の回避あるいは解消のための運転操作を迅速におこなう上でさらなる改善の余地がある。
【0005】
したがって、本発明の目的は、渋滞予兆を的確におこなうと共にその予兆結果を運転者にとって見やすくわかりやすく表示して、運転者が渋滞の回避あるいは解消のための運転操作を迅速におこなうことが可能な渋滞予兆表示方法を提供することである。
【課題を解決するための手段】
【0006】
本発明は、自車両の加速度を検出するステップと、検出した加速度の周波数分析から周波数に対応するパワースペクトルを算出するステップと、算出したパワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出するステップと、傾き極大値に応じて自車両前方での渋滞予兆度を算出するステップと、渋滞予兆度に応じた表示をおこなうステップと、を含む渋滞予兆表示方法である。
【0007】
本発明によれば、渋滞予兆を視覚的に把握できるので、運転者が渋滞の回避あるいは解消のための運転操作へ迅速に移行することが可能となる。
【0008】
本発明の一形態によると、さらに、自車両と先行車両との車間距離を検出するステップを含み、表示をおこなうステップはその車間距離も同時に表示する。
【0009】
本発明の一形態によれば、渋滞予兆と共に先行車両との車間距離をも視覚的に把握できるので、運転者が車間距離を把握した上で渋滞の回避あるいは解消のための運転操作をとることが可能となる。
【0010】
本発明の一形態によると、表示をおこなうステップは、渋滞予兆が有る場合と無い場合とで表示形態を変化させる。
【0011】
本発明の一形態によれば、渋滞予兆の有無を即座に把握することができるので速やかに渋滞への進行を防ぐために適した運転操作へ移行することが可能となる。
【図面の簡単な説明】
【0012】
【図1】本発明の一実施例に従う、渋滞予兆表示方法を実施する装置の構成を示す図である。
【図2】本発明の一実施例に従う、加速度スペクトルを示す図である。
【図3】本発明の一実施例に従う、渋滞予兆度と傾き極大値との関係を説明するための図である。
【図4】本発明の一実施例に従う、表示器の配置例を示す図である。
【図5】本発明の一実施例に従う、表示器による表示例を示す図である。
【図6】本発明の一実施例に従う、渋滞予兆表示制御のフローチャートである。
【発明を実施するための形態】
【0013】
図面を参照しながら本発明の実施の形態を説明する。図1は、本発明の一実施形態に従う、渋滞予兆表示方法を実施する渋滞予兆表示装置10の構成を示す図である。渋滞予兆表示装置10は車両に搭載される。渋滞予兆表示装置10は、1つの装置としてあるいは他の装置の一部として車両に搭載することができる。
【0014】
渋滞予兆表示装置10は、車速センサ11、レーダ装置12、ナビゲーション装置13、処理装置14、スイッチ15、各種アクチュエータ16、スピーカー17、表示器18、および通信装置19を備える形で構成される。なお、処理装置14は、ナビゲーション装置13の中に組み込んでもよい。また、スピーカー17および表示器18は、ナビゲーション装置13が備える該当機能を利用してもよい。
【0015】
車速センサ11は、自車両の加速度を検出し、その検出信号を処理装置14へ送る。レーダ装置12は、自車両の周辺に設定される所定の検出対象領域を複数の角度領域に分割し、各角度領域を走査(スキャン)しながら赤外光レーザやミリ波等の電磁波を発信する。レーダ装置12は、検出対象領域における物体からの反射信号(電磁波)を受信し、その反射信号を処理装置14へ送る。
【0016】
ナビゲーション装置13は、GPS信号等の測位信号を受信して、その測位信号から自車両の現在位置を算出する。また、ナビゲーション装置13は、車速センサ11およびヨーレートセンサ(図示なし)等が検出した加速度およびヨーレートから自律航法を用いて自車両の現在位置を算出することもできる。ナビゲーション装置13は、地図データを備え、表示する地図上に自車両の現在位置、目的地までの経路情報や渋滞情報等を出力する機能を有する。
【0017】
処理装置14は、周波数分析部31、単回帰直線算出部32、傾き極大値算出部33、反射点検出部34、他車両検出部35、車間距離検出部36、渋滞予兆算出部37、走行制御部38、報知制御部39、および通信制御部40を備える。各ブロックの機能は、処理装置14が有するコンピュータ(CPU)によって実現される。各ブロックの機能の詳細は後述する。
【0018】
処理装置14は、ハードウエア構成として、例えば、入力アナログ信号をデジタル信号に変換するA/D変換回路、各種演算処理を行う中央演算処理装置(CPU)、CPUが演算に際してデータを記憶するのに使用するRAM、CPUが実行するプログラムおよび用いるデータ(テーブル、マップを含む)を記憶するROM、スピーカー17に対する駆動信号および表示器18に対する表示信号などを出力する出力回路を備えている。
【0019】
スイッチ15は、自車両の走行制御に係る各種信号を処理装置14へ出力する。各種信号には、例えばアクセルペダルの操作(位置)信号、自動走行制御(ACC)に係る各種信号(制御開始、制御停止、目標車速、車間距離等)などが含まれる。
【0020】
各種アクチュエータ16は、複数のアクチュエータの総称として用いており、例えばスロットルアクチュエータ、ブレーキアクチュエータ、ステアリングアクチュエータ等が含まれる。
【0021】
表示器18は、LCD等のディスプレイを含み、タッチパネル機能を有するディスプレイとすることができる。表示器18は、音声出力部および音声入力部を備える構成でもよい。表示器18は、報知制御部39からの制御信号に応じて、所定の警報情報を表示したり、所定の警告灯を点滅ないし点灯させることによって、運転者に報知する。スピーカー17は、報知制御部39からの制御信号に応じて所定の警報音や音声を出力することによって、運転者に報知する。
【0022】
通信装置19は、通信制御部40による制御下で、無線通信によって他車両あるいはサーバ装置(図示なし)や中継局(図示なし)と通信を行い、渋滞予兆算出37から出力される渋滞予兆算出結果と位置情報を対応付けて送信したり、他車両等から渋滞情報等を受信する。取得された情報は、通信制御部40を介して報知制御部39あるいは走行制御部38に送られる。
【0023】
次に処理装置14の各ブロックの機能について説明する。周波数分析部31は、車速センサ11が検出した自車両の加速度について周波数分析を行い、パワースペクトルを算出する。図2に2つの異なる走行状態(a)、(b)におけるパワースペクトルの例を示す。図2では、パワースペクトルとして周波数に対応した加速度スペクトル51、53が例示されている。
【0024】
単回帰直線算出部32は、得られたパワースペクトルに対して単回帰分析をおこない単回帰直線を算出する。図2の例では、符号52、54で指示される直線がそれぞれ加速度スペクトル51、53に対して得られる単回帰直線である。
【0025】
傾き極大値算出部33は、得られた単回帰直線から傾き極大値を算出する。図2の例では、最初に単回帰直線52、54の傾きを算出する。すなわち、図2において、所定の周波数範囲Y(例えば、数秒から数分の時間範囲に対応する周波数範囲、0〜0.5Hz等)でのスペクトル値の変化Xに基づき傾きα(=Y/X)を算出する。図2では(a)と(b)での傾きα1、α2が得られる。
【0026】
次に、得られた傾きαの差分、すなわち所定の時間間隔での傾きαkとαk−1との差分Δα(=αk―αk−1)を算出する。得られた差分Δαの時間変化、あるいは差分Δαから得られるパラメータ(例えば、絶対値|Δα|、2乗値(Δα)2等)の時間変化の極大値を求める。得られた極大値を傾き極大値として処理装置14内のメモリ(RAM等)に格納する。
【0027】
反射点検出部34は、レーダ装置12が検出した反射信号から反射点(物体)の位置を検出する。他車両検出部35は、反射点検出部34から出力される反射点の位置情報に基づき、隣り合う反射点間の距離、反射点の分布状態等から自車両の周辺に存在する少なくとも1台以上の他車両を検出する。車間距離検出部36は、反射点検出部34が検出した他車両情報から自車両と他車両との間の車間距離を検出し、その結果を走行制御部38、報知制御部39、および通信制御部40へ出力する。
【0028】
渋滞予兆算出部37は、傾き極大値算出部33により算出された傾き極大値に応じて渋滞予兆度を算出する。ここで、渋滞予兆度は、自車両前方にける道路(車線)において渋滞に至る可能性を示すパラメータとして定義する。すなわち、渋滞予兆度は、渋滞となる可能性が高い場合に大きくなり、その可能性が低い場合に小さくなる。この渋滞予兆度を本発明では傾き極大値から算出する。
【0029】
図3は、渋滞予兆度と傾き極大値との関係を説明するための図である。図3の直線56、57は、図2の直線52、54と同様に単回帰直線算出部32によって求められる単回帰直線である。単回帰直線56は傾きαが小さい場合の例であり、単回帰直線57は傾きαが大きい場合の例である。渋滞予兆度の大小を判定する閾値については、任意の値を定めることができるが、一般的に(1/f)ゆらぎ特性として知られている「−45度」をその値とすることができる。
【0030】
傾きαが小さい場合は、先行車両から受ける衝撃波(振動、ゆらぎ)が小さい場合に相当し、車間距離が短くなって車群が密になる、すなわち渋滞に至る可能性が大きい場合に相当する。この場合、渋滞予兆度は大きな値をとる。逆に傾きαが大きい場合は、先行車両から受ける衝撃波(振動、ゆらぎ)が大きい場合に相当し、車間距離が短くなりにくく車群が密になりにくい、すなわち渋滞に至る可能性が小さ場合に相当する。この場合、渋滞予兆度は小さな値をとる。なお、ここで言う衝撃波(振動、ゆらぎ)とは、各車両が加速および減速の動作を繰り返すことにより後方の車両にその動作(前後の動き)を一種の振動として伝播させることを意味する。図3の例では、単回帰直線56から単回帰直線57へ向かって傾きαが大きくなるにつれて、渋滞に至る可能性が低くなっていく、すなわち渋滞予兆度が小さくなっていく関係にある。
【0031】
したがって、本発明ではこの単回帰直線の傾きの大きさ、より具体的には、傾き極大値算出部33によって算出された傾き極大値(例えば、|Δα|、(Δα)2等の時間変化の極大値)に応じて渋滞予兆度を算出する。具体的には、例えば傾き極大値(x)と渋滞予兆度(y)との関係を示す関数(例えば、y=ax+b)を予め求めておき、傾き極大値算出部33によって算出された傾き極大値(x)に対する渋滞予兆度(y)を算出する。あるいは、傾き極大値と対応する渋滞予兆度の値との関係を予め作成してテーブルとしてメモリに格納しておき、算出された傾き極大値に対する渋滞予兆度をそのテーブルを参照して求めることもできる。
【0032】
渋滞予兆算出部37は、算出した渋滞予兆度を含む制御信号を走行制御部38、報知制御部39、および通信制御部40に送る。また、渋滞予兆算出部37は、渋滞予兆度をナビゲーション装置13に出力する。ナビゲーション装置13は、渋滞予兆算出部37から受信した渋滞予兆度と、通信制御部40から出力される他車両において予測された渋滞予測結果等とに基づき、渋滞を回避するように自車両の経路探索や経路誘導を行うことができる。
【0033】
走行制御部38は、渋滞予兆算出部37から出力される渋滞予兆度と通信制御部40から出力される他車両において予測された渋滞発生予測結果等と、スイッチ15から出力される各種信号と、車速センサ11から出力される自車両の加速度の検出結果と、車間距離検出部36から出力される車間距離の検出結果とに基づき、各種アクチュエータを制御することにより、自車両の走行を制御する。
【0034】
報知制御部43は、渋滞予兆算出部37から出力される渋滞予兆度と通信制御部40から出力される他車両において予測された渋滞発生予測結果等とに基づき、表示器18およびスピーカー17による報知制御をおこなう。報知制御部43は、例えば、「減速して車間距離を取ること」等をスピーカー17から音声で伝えたりするための制御信号を送る。
【0035】
図4は、本発明の一実施例に従う、車室内での表示器の配置例を示す図である。図4では、表示部63を、車室の中心線C上に位置するルームミラー62の下部に設置する場合と、フロントカバー部60の上に設置する場合を例示している。表示部63は、ナビゲーション装置13の表示部61の一部として組み込むあるいはその上部等に配置してもよい。なお、表示部63は、車室の中心付近に位置することが望ましい。その理由は、表示部63が車室の中心付近に位置することにより、運転者の視線方向が左右いずれに向かっていても、表示部63を運転者の視野内に入れることができるからである。
【0036】
図5は、表示部63の表示例を示す図である。表示部63は、渋滞予兆の有無を表示する点灯部631、632を有する。点灯部631は、渋滞予兆度が所定値以下の場合、すなわち渋滞の可能性が低い場合に所定の色(例えば緑色)で点灯あるいは点滅する。点灯部632は、渋滞予兆度が所定値より大きい場合、すなわち渋滞の可能性が高い場合に所定の色(例えば赤色)で点灯あるいは点滅する。なお、図の点灯部631、632内の文字表示は説明のために記載されているもので実際には表示してもしなくてもよい。この渋滞予兆の有無の表示により、運転者は前方での渋滞の可能性を視覚的に把握することができ、減速して車間距離をとる等の渋滞回避のための運転に速やかに移行することが可能となる。
【0037】
表示ブロック633は、上述した衝撃波が所定の大きさ以上の場合に所定の色(例えば白色)で点灯する。衝撃波の大きさは、渋滞予兆算出部37において渋滞予兆度を算出する際に用いる傾き極大値の時間的変化(微分値)の大きさ等から算出することができる。例えば、その時間的変化が小さい場合には衝撃波は小さく、時間的変化が大きい場合には衝撃波は大きくなるので、所定のしきい値を設けて、そのしきい値を越えた場合に点灯部633を点灯させるようにする。なお、この衝撃波の有無の表示633は設けなくてもよく、適宜設定することができる。表示ブロック634には、車間距離検出部36から送られる車間距離(m)を表示する。
【0038】
表示ブロック635、636、637は、スイッチボタンであり、それぞれ、点灯部631、632の表示をオフさせるスイッチ、表示ブロック633の表示をオフさせるスイッチ、表示部63全体の表示をオフさせるスイッチである。運転者は各スイッチを押す(触れる)ことにより、手動で対応する表示機能を停止させることができる。
【0039】
図6は、本発明の一実施例に従う、渋滞予兆表示制御のフローチャートである。なお、各ステップの詳細は既に説明した通りである。ステップS10において、車速センサ11によって自車両の加速度を検出する。並行して、ステップS12において、レーダ装置12からの出力信号に基づき自車両の周辺の車両との車間距離を検出する(図1のブロック34〜36)。
【0040】
ステップS14において、加速度スペクトル単回帰極大化をおこなう。具体的には、上述した傾き極大値を算出する(図1のブロック31〜33)。ステップS16において、渋滞予兆度を算出する(図1のブロック37)。ステップS18において、渋滞予兆の有無、すなわち渋滞予兆度が所定値より大きいか否かを判定する。この判定がYesの場合、次のステップS20において渋滞予兆の有無等の表示をおこなう。ステップS18の判定がNoの場合、ステップS14に戻り以降のフローを繰り返す。
【0041】
以上、本発明の実施の形態について説明したが、本発明はこのような実施形態に限定されることはなく、本発明の趣旨を逸脱しない範囲において改変して用いることができる。
【符号の説明】
【0042】
10 渋滞予兆表示装置
14 処理装置
51、53 加速度(パワー)スペクトル
52、54、56、57 単回帰直線
63 表示部
【特許請求の範囲】
【請求項1】
自車両の加速度を検出するステップと、
検出した加速度の周波数分析から周波数に対応するパワースペクトルを算出するステップと、
算出したパワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出するステップと、
傾き極大値に応じて自車両前方での渋滞予兆度を算出するステップと、
渋滞予兆度に応じた表示をおこなうステップと、
を含む渋滞予兆表示方法。
【請求項2】
さらに、自車両と先行車両との車間距離を検出するステップを含み、
前記表示をおこなうステップは当該車間距離も同時に表示する、請求項1に記載の渋滞予兆表示方法。
【請求項3】
前記表示をおこなうステップは、渋滞予兆が有る場合と無い場合とで表示形態を変化させる、請求項1または2に記載の渋滞予兆表示方法。
【請求項1】
自車両の加速度を検出するステップと、
検出した加速度の周波数分析から周波数に対応するパワースペクトルを算出するステップと、
算出したパワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出するステップと、
傾き極大値に応じて自車両前方での渋滞予兆度を算出するステップと、
渋滞予兆度に応じた表示をおこなうステップと、
を含む渋滞予兆表示方法。
【請求項2】
さらに、自車両と先行車両との車間距離を検出するステップを含み、
前記表示をおこなうステップは当該車間距離も同時に表示する、請求項1に記載の渋滞予兆表示方法。
【請求項3】
前記表示をおこなうステップは、渋滞予兆が有る場合と無い場合とで表示形態を変化させる、請求項1または2に記載の渋滞予兆表示方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−128614(P2012−128614A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−278756(P2010−278756)
【出願日】平成22年12月15日(2010.12.15)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【出願人】(504137912)国立大学法人 東京大学 (1,942)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月15日(2010.12.15)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【出願人】(504137912)国立大学法人 東京大学 (1,942)
【Fターム(参考)】
[ Back to top ]