
渋滞判定装置、渋滞判定方法及びコンピュータプログラム

【課題】プローブ情報に基づく渋滞判定を簡単な判定ロジックで行うことができる渋滞判定装置を提供する。
【解決手段】プローブ車両が生成したプローブ情報に基づいて道路が渋滞か否かを判定するための渋滞判定装置に関する。この判定装置は、プローブ情報に基づいてプローブ車両の走行速度、走行位置及び走行時刻を取得する取得手段と、プローブ車両の走行経路に含まれる複数の判定区間MSiのうち、低速閾値以下である走行速度Vでのプローブ車両の走行が特定の判定区間MSiにおいて継続する場合に、当該判定区間MSiを渋滞区間と判定する判定手段とを備える。
【解決手段】プローブ車両が生成したプローブ情報に基づいて道路が渋滞か否かを判定するための渋滞判定装置に関する。この判定装置は、プローブ情報に基づいてプローブ車両の走行速度、走行位置及び走行時刻を取得する取得手段と、プローブ車両の走行経路に含まれる複数の判定区間MSiのうち、低速閾値以下である走行速度Vでのプローブ車両の走行が特定の判定区間MSiにおいて継続する場合に、当該判定区間MSiを渋滞区間と判定する判定手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プローブ車両が生成した走行位置等を含むプローブ情報に基づいて、道路の渋滞を判定する渋滞判定装置、この装置が行う渋滞判定方法、及び、この方法を実行するためのコンピュータプログラムに関する。
【背景技術】
【0002】
地上に設置された計測装置で交通情報を計測する機器として、光ビーコン、超音波式車両感知器、ループ式車両感知器、画像感知器及び遠赤外センサが知られている。特に一般道路では、超音波式感知器が広く利用されており、幹線道路では、交差点からの距離をベースとした設置基準が決められている。
しかし、より詳細な情報をドライバに提供するという観点からすると、この設置基準は十分ではなく、特に道路の渋滞情報を上記機器で正確に計測するのは困難である。
【0003】
そこで、道路の渋滞情報を求める交通情報算出システムとして、動画撮影が可能なカメラを道路に設置し、このカメラで取得した道路の所定範囲の撮影画像を画像処理することにより、道路に発生した交通渋滞の状態や、交通渋滞の列の末尾を経時的に判定したり、その検出結果の経時変化に基づいて、交通渋滞の列が延伸するか減縮するかを判定したりするシステムが、既に知られている(特許文献1参照)。
【0004】
しかし、この従来の交通情報算出システムでは、撮影画像を画像処理して交通渋滞の状況等を判定するので、インフラ側にカメラの設置が必須な高価なシステムとなるし、カメラを設置していない道路の状況が分からないため、限られた場所での渋滞状況しか把握できない。
【特許文献1】特開2001−101569号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
一方、地上の計測機器を利用しない交通情報の収集方法として、プローブ車両が生成したプローブ情報を光ビーコンや携帯電話機等を通じて交通管制センタに送信し、このセンタにおいてリンク旅行時間を推定する技術が検討及び実験され、その一部が既に実用化されている。
上記プローブ情報には、プローブ車両の走行速度、走行位置及び走行時刻が含まれているため、例えば、プローブ車両の平均速度が、ある特定の区間において所定の閾値以下になる場合には、一応、この区間で渋滞が発生している可能性があると推定できる。
【0006】
しかし、ある区間でのプローブ車両の平均速度の低下は、走行途中で遭遇した交差点での信号待ちが原因であることもあり得るので、プローブ車両の平均速度に基づいて渋滞か否かを正確に判定するためには、交差点の信号切り替えタイミングとの関係を判定ロジックに含める必要があり、その判定ロジックが非常に複雑になる。
本発明は、このような問題点に鑑み、プローブ情報に基づく渋滞判定を簡単な判定ロジックで行うことができる渋滞判定装置等を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の渋滞判定装置(請求項1)は、プローブ車両が生成したプローブ情報に基づいて道路が渋滞か否かを判定するための渋滞判定装置であって、前記プローブ情報に基づいて前記プローブ車両の走行速度、走行位置及び走行時刻を取得する取得手段と、前記プローブ車両の走行経路に含まれる複数の判定区間のうち、低速閾値以下の前記走行速度での前記プローブ車両の走行が特定の前記判定区間において継続する場合に、当該判定区間を渋滞区間と判定する判定手段と、を備えていることを特徴とする。
【0008】
本発明の渋滞判定装置によれば、上記判定手段が、低速閾値以下の走行速度でのプローブ車両の走行(低速走行)が特定の判定区間において継続するか否かにより、当該判定区間が渋滞区間であるか否かを判定する。この場合、特定の判定区間の全域に渡ってプローブ車両の低速走行が継続しているなら、交差点の信号待ちが原因かどうかを判断するまでもなく、当該判定区間において渋滞が生じている蓋然性が高いと言える。
このため、本発明の渋滞判定装置によれば、走行経路に含まれる交差点の信号切り替えタイミングを考慮しなくても、特定の判定区間が渋滞区間であるか否かを判定でき、プローブ情報に基づく渋滞判定を簡単な判定ロジックで行うことができる。
【0009】
なお、「プローブ情報」とは、少なくとも車両の走行位置及び走行時刻を含む情報のことをいう。このプローブ情報には、走行速度が含まれていても良い。また、「プローブ車両」とは、上記プローブ情報を提供することができる車両のことをいう。
プローブ情報の生成は、例えば、ナビゲーションシステム等の車載装置や、運転者を含む搭乗者が所持する携帯電話等の携帯端末装置において行われる。
また、上記の通り、「プローブ情報」には、走行位置及び走行時刻のみが含まれ、走行速度は走行位置と走行時刻から算出する場合もある。従って、取得手段は、走行位置と走行時刻については、プローブ車両から直接取得するが、走行速度については、プローブ車両から直接取得しても良いし、走行位置と走行時刻とから算出することにより取得しても良い。
【0010】
本発明の渋滞判定装置において、前記判定手段は、前記渋滞区間の判定条件として、更に次の(a)又は(b)の条件、若しくは、これらの双方の条件を付加することにしてもよい(請求項2)。
(a) 前記判定区間を走行する前記プローブ車両による、加速閾値以上の加速回数が所定回数以上であること
(b) 前記判定区間を走行する前記プローブ車両による、減速閾値以下の減速回数が所定回数以上であること
【0011】
また、本発明の渋滞判定装置において、前記判定手段は、前記渋滞区間の判定条件として、更に次の(c)の条件を付加することにしてもよい(請求項3)。
(c) 前記判定区間を走行する前記プローブ車両による、加速閾値以上でかつ減速閾値以下である加減速ペアの回数が所定回数以上であること
【0012】
上記条件(a)〜(c)が渋滞区間の判定条件になる理由は、渋滞中の道路を低速走行する車両のドライバは、前方を走行する車両と衝突しないように、頻繁に加減速を繰り返す運転方法を採るのが経験則として認められ、この運転方法が行われる車両には、比較的短い時間内での加速度と減速度とが頻繁に発生するからである。
この場合、判定区間を走行中のプローブ車両の走行速度だけでなく、そのプローブ車両に発生した加速回数や減速回数によっても、判定区間が渋滞区間か否かを判定するので、渋滞区間の判定精度を向上することができる。
【0013】
一方、判定された渋滞区間が、上流側から順に判定される複数の判定区間のうちで最初に検出されたものであれば、当該渋滞区間の上流端が渋滞末尾であると考えられる。
そこで、本発明の渋滞判定装置において、前記判定手段として、前記渋滞区間が、前記渋滞区間と判定されない非渋滞区間の下流側に位置する場合に、当該渋滞区間の上流端を渋滞末尾と判定するものを採用すれば(請求項4)、渋滞区間を利用して渋滞末尾を簡単に判定できるようになる。
【0014】
また、本発明の渋滞判定装置において、前記判定手段として、前記複数の判定区間の中から、前記プローブ車両が渋滞でなく自由に走行可能な自由走行区間を判定し、前記渋滞区間が前記自由走行区間の下流側に位置する場合に、当該渋滞区間の上流端を渋滞末尾と判定するものを採用することもできる(請求項5)。
具体的には、前記判定手段は、前記複数の判定区間のうち、前記プローブ車両の平均速度が高速閾値以上となる当該判定区間を前記自由走行区間であると判定することができる(請求項6)。
【0015】
本発明の渋滞判定装置において、前記判定手段において、前記低速閾値は、前記判定区間における前記プローブ車両の平均速度に基づいて設定することが好ましく(請求項7)、また、前記高速閾値についても、前記判定区間における前記プローブ車両の平均速度に基づいて設定することが好ましい(請求項8)。
その理由は、ある道路を走行する車両の平均速度は、道路の車線数や幅員、或いは、近隣施設の有無や都心又は地方などの道路条件の違いによって変化するので、判定区間における平均速度に基づいて閾値を設定すれば、その閾値を一律に設定する場合に比べて、判定区間となった道路固有の閾値を個別にかつ適切に設定することができ、渋滞区間や自由走行区間の判定をより正確に行うことができるからである。
【0016】
ところで、プローブ車両の平均速度と高速閾値とを対比して前記自由走行区間を判定する場合において、交通信号による停止のために走行速度がゼロとなる場合をプローブ車両の平均速度の算出データとして使用すると、信号待ち等の渋滞以外の原因のためにプローブ車両の平均速度が低くなり、自由走行区間の判定精度に影響が生じる。
そこで、前記判定手段は、交通信号による停止のためにゼロとなった前記走行速度による影響を軽減するように、前記自由走行区間の判定のための平均速度を算出することが好ましい(請求項9)。
【0017】
また、実際に渋滞が生じている場合であっても、プローブ車両の走行速度が瞬間的に低速閾値を超えてから低速閾値以下に戻る急変動が生じる現象が、経験的に認められる。従って、このような走行速度の急変動については、渋滞区間の判定の際に除外しないと、実際に渋滞している判定区間を渋滞でないと誤判定することになる。
そこで、本発明の渋滞判定装置において、前記判定手段は、瞬間的に前記低速閾値を超えかつ当該低速閾値以下に戻る急激な前記走行速度の変動値を、前記渋滞区間の判定のためのデータから除外することが好ましい(請求項10)。
【0018】
本発明の渋滞判定装置において、前記取得手段は、複数のプローブ車両からそれぞれプローブ情報を取得することができ、前記判定手段は、複数のプローブ情報に基づいて同じリンクについての渋滞末尾の位置と時刻を検出することができる。
そこで、本発明の渋滞判定装置は、同じリンクについて前記判定手段が判定した複数の前記渋滞末尾の位置と時刻とに基づいて、前記渋滞の伸縮の伝搬速度を求める情報生成手段を、更に備えていること好ましい(請求項11)。
この場合、上記情報生成手段において、前記渋滞の伸縮の伝搬速度に基づいて前記リンクのリンク旅行時間を補正するようにすれば(請求項12)、将来発生し得る渋滞の伸縮を加味した正確なリンク旅行時間を求めることができる。
【0019】
本発明の渋滞判定方法(請求項13)は、本発明の渋滞判定装置(請求項1)が行う渋滞の判定方法であって、当該渋滞判定装置(請求項1)と同様の作用効果を奏する。
本発明のコンピュータプログラム(請求項14)は、本発明の渋滞判定装置(請求項1)が行う判定処理をコンピュータに実行させるためのコンピュータプログラムであって、当該渋滞判定装置(請求項1)と同様の作用効果を奏する。
【発明の効果】
【0020】
以上の通り、本発明によれば、走行経路に含まれる交差点の信号切り替えタイミングを考慮しなくても、特定の判定区間が渋滞区間であるか否かを判定できるので、プローブ情報に基づく渋滞判定を簡単な判定ロジックで行うことができる。
【発明を実施するための最良の形態】
【0021】
〔システムの全体構成〕
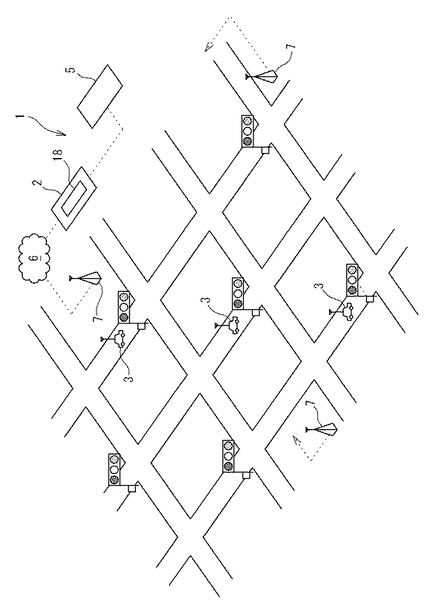
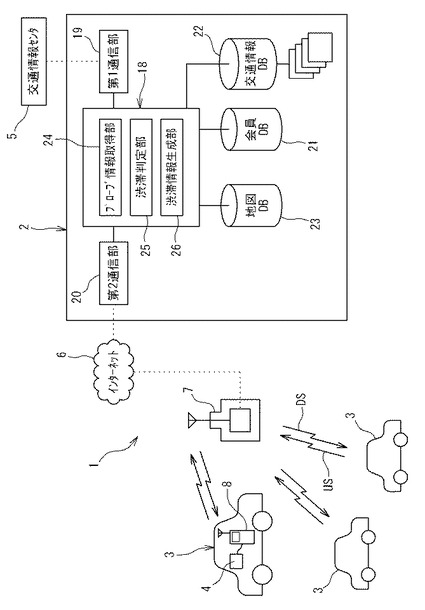
図1は、本発明の渋滞判定装置を有するナビゲーションシステムの全体構成を示す概略構成図であり、図2は、同システムの機能ブロック図である。
図1及び図2に示すように、本実施形態のナビゲーションシステム1は、サーバ装置2と、複数のプローブ車両3にそれぞれ搭載された車載装置4とから構成されている。
なお、本明細書において、「車両」とは、自動車、原動機付き自転車、軽車両及びトロリーバス等のことをいう。また、「車載装置」とは、車両に搭載されており、その搭乗者に対して目的地までの経路を案内するいわゆるナビゲーション装置のことをいう。
【0022】
このナビゲーションシステム1は、予め入会登録された会員(ユーザ)のプローブ車両3自体をセンサとして、各車両3からサーバ装置2が情報収集し、メンバー間で相互に情報提供し合って運用することにより、サーバ装置2が各会員に対して有用な交通情報を提供するようにしたものである。
従って、本システム1によれば、通常のVICS(登録商標:Vehicle Information and Communication System)情報とともに、このVICS情報に含まれていないより詳細かつ動的な交通情報を、各会員の車両3に提供することができる。
【0023】
本システム1のサーバ装置2は、専用の通信回線を介して交通情報センタ5に接続されており、必要に応じてVICS情報を交通情報センタ5から入手している。また、サーバ装置2は、インターネット網6を通じて携帯電話機8の無線基地局7と双方向で通信可能である。
各車両3の車両装置4は、搭乗者の携帯端末である携帯電話機8を介して、無線基地局7と双方向で通信可能であり、無線基地局7は上記インターネット網6に接続されている。このため、各車両3の車両装置4は、ほぼリアルタイムでサーバ装置2に対して情報を送受信可能となっている。
【0024】
〔車載装置の構成〕
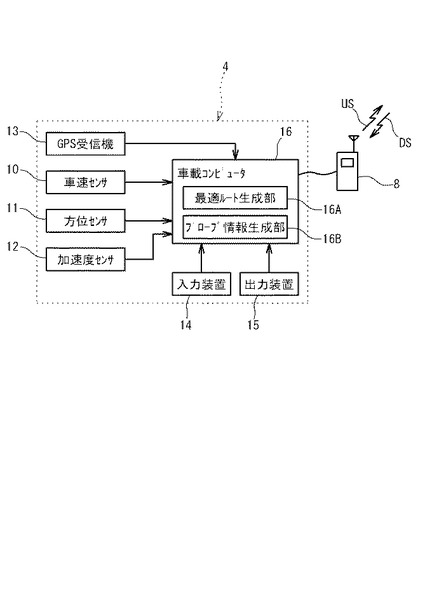
図3は、プローブ車両3に搭載される車載装置4の構成を示す機能ブロック図である。
各プローブ車両3の車載装置4は、車速センサ10と、方位センサ11と、加速度センサ12と、GPS(Global Positioning System )受信機13と、タッチパネル等よりなる入力装置14と、ディスプレイ及びスピーカ等よりなる出力装置15と、車載コンピュータ16とを含む。
【0025】
車載コンピュータ16は、HDDやメモリ等よりなる記憶装置と、この記憶装置から各種のコンピュータプログラムを読み出して実行する演算装置とを含んでいる。
車載コンピュータ16の記憶装置には、道路地図データを含む地図データベースが記録されており、車載コンピュータ16は、記憶装置内の地図データを、GPS受信機13で検出した車両3の現在位置とマッチングさせ、出力装置15のディスプレイ画面上に表示可能となっている。
【0026】
車載コンピュータ16の記憶装置には、上記地図データベースの他に、演算装置が実行する各種のコンピュータプログラムが格納されており、車載コンピュータ16は、当該コンピュータプログラムを用いて演算装置が実行する機能部として、車両3の最適経路の探索処理を行うルート生成部16Aと、サーバ装置2にアップロードするプローブ情報を生成するプローブ情報生成部16Bとを備えている。
【0027】
このうち、ルート生成部16Aは、入力装置14で入力された所定の旅行条件に基づいて、車両3の最適な走行経路を演算するものであり、例えば、出発地点から目的地点までの最小のリンクコストとなる最適経路を探索する、ダイクストラ法又はポテンシャル法を利用した経路探索ロジックを実行可能である。
入力装置14において入力可能な所定の旅行条件としては、出発地点(現在地点を含む。)や目的地点のほか、経由地や優先経路(一般道路優先又は有料道路優先や、距離優先又は道幅優先)等がある。
【0028】
車載コンピュータ16の記憶装置が記憶する地図データベースには、交差点データとリンクデータとが含まれている。
交差点データは、交差点IDと交差点位置とを対応付けたデータである。また、リンクデータは、特定リンクのリンクIDに対して、特定リンクの始点・終点・補間点の位置、特定リンクの始点に接続するリンクID、特定リンクの終点に接続するリンクID、及び、特定リンクのリンクコストを対応付けたデータよりなる。
【0029】
リンクコストは、例えば、特定リンクとその終点に接続するリンクの組み合わせの数だけ用意されており、特定リンクの始点に進入してから当該特定リンクの終点を退出し、次に接続するリンクの始点に進入するまでに要する時間として設定されている。
すなわち、リンクコストには、特定リンクの始点から終点までを走行するのに要するコスト(時間)と、その特定リンクの終点から次のリンクの始点までを走行するのに要するコスト(時間)、つまり、交差点通過に要するコストが含まれている。
【0030】
また、リンクコストは、平日、土曜、日曜及び祝日といった日種別ごとに、現時点から1日先までの5分毎のデータ(すなわち、現時点のリンクコスト、5分先のリンクコスト、10分先のリンクコスト、… …、23時間55分先のリンクコスト、24時間先のリンクコスト)が用意されている。これらのデータは、例えば、ダウンリンク情報DSに含まれる交通情報データベース23のVICS情報等に基づいて作成される。
【0031】
一方、車載コンピュータ16のプローブ情報生成部16Bは、所定時間ごと(例えば、0.1秒毎)又は所定距離ごと(例えば、5m毎)に、自車の走行速度、走行位置、走行時刻及び加減速度に関するデータを各種センサ10〜13から取得しており、これらのデータを含むプローブ情報を生成する。
また、情報生成部16Bが生成した上記プローブ情報は、車載コンピュータ16の記憶装置の一次記憶領域(メモリ)にいったん記憶され、リアルタイム或いは所定時間(例えば、1分ごと)に、アップリンク情報USに含めてサーバ装置2に送信される。
【0032】
なお、車載コンピュータ16の記憶装置の一次記憶領域には、サーバ装置2から受信するダウンリンク情報DSも保存することができる。
このダウンリンク情報DSに、サーバ装置2で生成された渋滞情報やその他の交通規制等の交通情報が含まれている場合には、ルート生成部16Aは、それらの交通情報を、最適経路探索の演算に利用する。
【0033】
〔サーバ装置の内部構成〕
図2に示すように、本実施形態のサーバ装置2は、ワークステーション等よりなる処理コンピュータ18と、この処理コンピュータ18に接続された通信インターフェースよりなる第1及び第2通信部19,20と、各種データベース21〜23とから構成されている。
【0034】
このうち、第1通信部19は、専用回線で交通情報センタ5に接続されている。また、第2通信部20は、インターネット網6を介して前記無線基地局7に接続され、この無線基地局7と車両3の搭乗者の携帯電話機8との間の無線通信を通じて、車載装置4との間で情報の送受信を行う。
各データベース21〜23のうち、会員データベース21には、当該システム1に参加する登録会員の識別情報が保存されている。処理コンピュータ18は、会員データベース21に記録されている特定の登録会員の車載装置4から受信したプローブ情報に基づき、後述する渋滞判定処理を実行可能である。
【0035】
交通情報データベース22には、第1通信部19が受信した交通情報センタ5からのVICS情報が保存される。このVICS情報は、処理コンピュータ18がセンタ5からのVICS情報を抽出するごとに更新され、ほぼ最新の情報が保持される。
また、交通情報データベース22には、特定の登録会員から受信したプローブ情報に含まれる、走行速度、走行位置、走行時刻及び加減速度に関するデータも保存される。なお、地図データベース23には、前記車載コンピュータ16の場合と同様に、交差点データとリンクデータとを含む道路地図データが含まれている。
【0036】
〔処理コンピュータの構成及び機能〕
処理コンピュータ18は、HDDやメモリ等よりなる記憶装置と、この記憶装置から各種のコンピュータプログラムを読み出して実行する演算装置とを含んでいる。
上記各コンピュータプログラムのうちの1つは、前記プローブ情報に基づいて道路に渋滞が生じている否かを判定する処理を行うものであり、この判定処理用のプログラムの機能部分として、プローブ情報取得部(取得手段)24と、渋滞判定部(判定手段)25と、渋滞情報生成部(情報生成手段)26とを含んでいる。
【0037】
このうち、プローブ情報取得部25は、インターネット6を通じて第2通信部20から得られる各会員のプローブ車両3が生成したプローブ情報を、その車両IDごとに常時取得している。また、情報取得部25は、プローブ情報に含まれる走行速度、走行位置、走行時刻及び加減速度に関するデータを、いったん交通情報データベース23に記憶させる。
一方、渋滞判定部25は、特定会員の車両IDを有するプローブ車両3についてのプローブ情報に基づいて、道路に渋滞が生じているか否かの判定処理を行う。以下、この判定処理について、説明する。
【0038】
〔渋滞判定処理の原理と手順〕
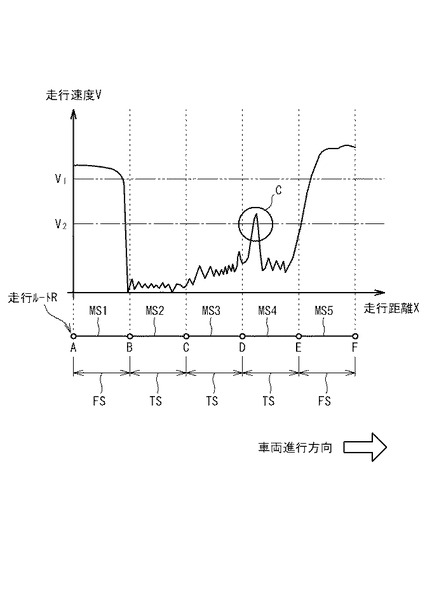
図4は、渋滞判定部25による渋滞判定の原理を説明するための、プローブ車両3の走行距離Xと走行速度Vとの関係を示すグラフである。
ここで、図4において、走行ルートRは、あるプローブ車両3の走行経路の一部を形成するルートであり、MSi(i=1〜6)は、この走行ルートRを、渋滞判定に適した所定の判定距離(例えば、500m)で分割した判定区間を示している。この判定距離は、1回の信号待ちで生じる待ち行列長(例えば、150m)よりも長い距離に設定されているものとする。
【0039】
また、図4の走行ルートRにおいて、FSは、プローブ車両3が渋滞でなく自由に走行可能な自由走行区間を示し、TSは、プローブ車両3が所定速度以下でののろのろ運転(停止も含む。)でしか走行できない渋滞区間を示している。
更に、図4に示すグラフにおいて、V1は、判定区間MSiが自由走行区間FSであるか否かを判定するための高速閾値であり、V2は、判定区間MSiが渋滞区間TSであるか否かを判定するための低速閾値である。
【0040】
上記各閾値V1,V2は、予め設定された固定値であってもよいが、本実施形態では、各車両3のプローブ情報に含まれる走行速度Vから求めるリンク平均速度VLから動的に設定している。
例えば、ある特定のリンクのリンク長が150mであり、その平均コストが10秒であるとすると、リンク平均速度VLは54km/hとなる。
そこで、この平均速度54km/hに所定の係数を掛けることにより、V1,V2を設定することができる。
【0041】
なお、ここでは、V1に対する係数αを1.0、V2に対する係数βを0.6する。従って、V1及びV2はそれぞれ次の値となる。
V1=α×VL=54km/h
V2=β×VL=32.4km/h
このように、本実施形態において、各閾値V1,V2をリンク平均速度VLに基づいて動的に設定したのは、次の理由による。
すなわち、道路を走行する車両3の平均速度は、道路の車線数や幅員、近隣施設の有無や都心又は地方などの道路条件の違いによって変化する。従って、各閾値V1,V2を固定値にすると、道路条件の相違による平均速度の変化に対応できず、判定の精度が悪くなると考えられる。そこで、本実施形態では、判定区間MSiにおけるリンク平均速度VLに対する割合で各閾値V1,V2を動的に設定することにより、判定区間MSiの道路条件に適合した閾値V1,V2を個別に求めるようにしている。
図4のグラフは、上記走行ルートRを走行するプローブ車両3の、当該走行ルートRに対する走行距離X(横軸)と走行速度V(縦軸)の関係を示している。
【0042】
例えば、図4のグラフでは、走行ルートRに含まれるすべての判定区間MSi(i=1〜5)のうち、最初の判定区間MS1と最後の判定区間MS5においては、当該区間MS1,MS5のほぼ全長に渡って走行速度Vが高速閾値V1を超えているので、この区間MS1,MS5では、プローブ車両3が自由に走行していた可能性が高いと言える。
一方、2番目の判定区間MS2から4番目の判定区間MS4においては、当該区間MS2〜MS4の全長に渡って走行速度Vが低速閾値V2を下回っているので(円C内の瞬間値を除く。)、この区間MS2〜MS4では、プローブ車両3で低速走行(のろのろ運転)が行われており、渋滞が発生している可能性が高いと言える。
【0043】
そこで、本実施形態の渋滞判定部25は、次の手順(1)〜(5)を実行して、走行ルートRに含まれる渋滞区間TSの有無を判定し、その渋滞末尾及び渋滞終点を検出する。
(1) 特定のプローブ車両3について、走行ルートRに含まれるプローブ情報を収集し、走行ルートRに対して複数の判定区間MSi(i=1〜5)を割り当てる。
(2) 各判定区間MSiについて、その上流側から順に、次の判定条件(ア)及び(イ)に基づき、当該判定区間MSiが自由走行区間FS又は渋滞区間TSのいずれであるかを判定する。
【0044】
(ア) 判定区間MSi(i=1〜5)におけるプローブ車両3の「平均速度Vm」が高速閾値V1以上である場合には、自由走行区間FSと判定する。
(イ) 判定区間MSi(i=1〜5)において、プローブ車両3の「走行速度V」(瞬時値)が高速閾値V2以下である状態が継続している場合には、渋滞区間TSと判定する。
【0045】
(3) 隣接する2つの判定区間MSi,MSi+1において、上流側の判定区間MSi(図4ではMS1)が自由走行区間FSであり、下流側の判定区間MSi+1(図4ではMS2)が渋滞区間TSである場合には、その下流側の判定区間MSi+1の上流端(図4の地点B)を、渋滞末尾とする。
(4) 最初の渋滞区間TSの検出以降も、次に自由走行区間FS(図4では判定区間MS5)が検出されるまで、上流側から順に上記(2)の区間判定を繰り返す。
(5) 次の自由走行区間FSが検出された場合に、これに隣接する上流側の渋滞区間TSの下流端(図4の地点E)を、渋滞終点とする。
【0046】
〔渋滞区間の判定条件の強化〕
ところで、渋滞中の道路を低速走行する車両3のドライバは、その前方を走行する車両3と衝突しないように、頻繁に加減速を繰り返す運転方法を採るのが一般的であり、この場合、車両3には、比較的短い時間内での加速度と減速度とが頻繁に発生することになる(図4のグラフにおける、地点Bから地点Eまでに見られる走行速度Vの上下微変動)。
従って、プローブ車両3に生じる加減速回数の頻度も、渋滞区間TSの判定条件となり得ると考えられる。
【0047】
そこで、本実施形態の渋滞判定部25では、渋滞区間TSの判定条件として、走行速度Vに基づく前記判定条件(イ)に加えて、次の判定条件(ウ)を更に有している。
(ウ) 判定区間MSiを走行するプローブ車両3による、ある加速閾値(例えば、毎秒5km/h)以上でかつ減速閾値(例えば、毎秒3km/h)以下である加減速ペアの回数が、所定回数(例えば、10回)以上であること。
なお、上記加減速ペアの回数を用いる代わりに、加速閾値以上の加速回数が所定回数以上であること、又は、減速閾値以下の減速回数が所定回数以上であることのいずれか一方を採用してもよく、若しくは、これらの双方を採用することにしてもよい。
【0048】
また、実際の渋滞区間では、前方を走行する車両3との車間距離を詰めるために、急発進の直後に急停車する車両3もあり、この場合の走行速度Vは、例えば図4の円C内に示すように、瞬間的かつ急激に低速閾値V2を超え、再び、低速閾値V2以下に急降下する挙動になる。
従って、かかる瞬間的な走行速度Vの変動については、渋滞区間TSの判定の際に除外しないと、実際には渋滞している判定区間MSiを渋滞でないと誤判定してしまう。そこで、本実施形態の渋滞判定部25は、瞬間的に低速閾値V2を超えているような走行速度Vについては、渋滞区間TSの判定のためのデータから除外するようになっている。
【0049】
〔自由走行区間の判定に用いる平均速度〕
プローブ車両3の平均速度Vmと高速閾値V1とを対比して自由走行区間FSであるか否かを判定する(前記判定条件(ア))に当たって、交通信号による停止のために走行速度Vがゼロとなる場合を、プローブ車両3の平均速度Vmの算出データに含めると、渋滞以外の原因のためにプローブ車両3の平均速度Vmが必要以上に低くなってしまい、自由走行区間FSの判定精度が悪くなる。
【0050】
そこで、本実施形態の渋滞判定部25は、交通信号による停止のためにゼロとなった走行速度Vが、自由走行区間FSの判定条件(ア)で用いる平均速度Vmに余り影響しない算出方法を採用している。図5は、その算出方法を示すグラフである。
図5に示すように、ここでは、ある判定区間MSiが、同じ距離の複数の分割区間DSj(j=1〜5)に分割されており、分割区間DS4と分割区間DS5の間のノード4において、交通信号による停止のために走行速度Vがゼロとなっているものとする。
【0051】
そして、図5(a)に示す算出方法では、各ノード1〜5での走行速度Vの瞬間値を用いて、判定区間MSiにおける車両3の平均速度Vmを算出するが、この際、ノード4での瞬間値を除外し、残りのノード1,2,3,5の瞬間値を用いて、平均速度Vmを算出するようになっている。
一方、図5(b)に示す算出方法では、各分割区間DSjの分割平均速度Vdj(j=1〜5)をそれぞれ算出し、この分割平均速度Vdjの更に平均をとって、判定区間MSiにおける車両3の平均速度Vmとしている。
【0052】
〔渋滞判定のフローチャート〕
図6は、上記渋滞判定部25が行う判定処理を示すフローチャートである。
図6に示すように、渋滞判定部25は、まず、最初の判定区間MS1での平均速度Vmが高速閾値V1以上となるか否か(判定条件(ア))を判定する(ステップS1)。
この判定結果がNOである場合には、渋滞判定部25は、判定区間MSiを下流側に1ずつ移動し、同じ判定を繰り返す(ステップS2)。
【0053】
ある判定区間MSiについての上記判定結果がYESの場合には、渋滞判定部25は、判定区間MSiを1つ下流側に移動した上で(ステップS3)、その下流側の判定区間MSiの全域において、車両3の走行速度Vが低速閾値V2となる状態が継続しているか否か(判定条件(イ))を判定する(ステップS4)。
この判定結果がYESである場合には、渋滞判定部25は、更に、判定区間MSiを走行する車両3において、所定の加減速動作が所定頻度以上で発生しているか否か(判定条件(ウ))を判定する(ステップS5)。
【0054】
この判定結果がYESである場合には、渋滞判定部25は、当該判定区間MSiについての渋滞末尾が決定済みか否かを判定し(ステップS6)、決定済みでない場合には、当該判定区間MSiでの渋滞末尾を決定した上で(ステップS7)、判定区間MSiを1つ下流側に移動して(ステップS8)、前記ステップS4に戻る。
また、当該判定区間MSiについての渋滞末尾が既に決定済みである場合には、その末尾決定を行わずに、判定区間MSiを1つ下流側に移動して(ステップS8)、前記ステップS4に戻る。
【0055】
一方、前記ステップS4(判定条件(イ))での判定結果がNOである場合には、渋滞判定部25は、判定区間MSiを走行する車両3の走行速度Vが低速閾値V2を超えた原因が瞬間的なものか否かを判定し(ステップS9)、この判定結果がYESである場合には、当該ステップS4の判定結果をYESに変更する。
上記ステップS5での判定結果がNOである場合、又は、上記ステップS9での判定結果がNOである場合には、渋滞判定部25は、渋滞末尾が決定済みか否かを判定する(ステップS10)。
【0056】
上記ステップS10での判定結果がNOである場合には、渋滞判定部25は、判定処理をステップS3の手前に戻し、ステップS10でのその判定結果がYESである場合には、渋滞判定部25は、渋滞区間TSを決定して(ステップS11)、処理を終了する。
【0057】
このように、本実施形態の処理コンピュータ18によれば、各判定区間MSiにおいて、低速閾値V2以下の走行速度Vでのプローブ車両3の走行(低速走行)が継続するか否かにより、当該判定区間MSiが渋滞区間TSであるか否かを判定するので、走行経路に含まれる交差点の信号切り替えタイミングを考慮しなくても、特定の判定区間MSiが渋滞区間TSであるか否かを判定することができる。このため、プローブ情報に基づく渋滞判定を簡単な判定ロジックで行うことができる。
【0058】
〔渋滞情報生成部の処理内容〕
次に、図7〜図9を参照しつつ、前記渋滞情報生成部26の処理内容を説明する。
本実施形態の渋滞情報生成部26は、前記渋滞判定部25が、複数のプローブ車両3からのプローブ情報に基づいて同じ渋滞を検出していることを前提として、その渋滞末尾の伸縮状態と、その渋滞の伸縮の伝搬速度を算出する。
【0059】
図7は、渋滞の伸縮判定の原理を示す説明図である。
図7に示す例では、同じリンクLについて、車両3Aとこれと別の車両3Bのプローブ情報に基づいて、それぞれ渋滞末尾Pが検出されているものとする。
そして、車両3Aでは、時刻Ta(=13:00)に渋滞末尾Pが判定され、その末尾Pの位置がリンクLの始端から距離La(=1000m)の位置であったとし、車両3Bでは、時刻Tb(=13:15)に渋滞末尾Pが判定され、その末尾Pの位置がリンクLの始端から距離Lb(=500m)の位置であったする。
【0060】
この場合、時刻Taから時刻Tbまでの15分の間に、渋滞末尾Pの位置が500m(=La−Lb)だけ上流側に移動しているので、このリンクLに生じた渋滞は、延伸中であると判断される。このように、Ta<Tbの場合において、La>Lbであれば、リンクLに生じている渋滞が延伸していると判断することができる。
逆に、La<Lbであれば、リンクLに生じた渋滞は減縮していると判断することができる。
【0061】
そこで、本実施形態の渋滞情報生成部26は、渋滞の延伸又は減縮の伝搬速度をJvとして、この伝搬速度Jvを次の式に基づいて算出する。
Jv=(La−Lb)/(Tb−Ta)
なお、図7の例では、渋滞が15分で500m拡大しているので、上記伝搬速度Jvは2km/hとなる。
【0062】
〔渋滞の状況レベル〕
図8は、上記伝搬速度Jvに対応する渋滞の状況レベルを判定するための、参照テーブル(LUT)の一例を示している。
本実施形態の処理コンピュータ18は、この図8に示す参照テーブルを記憶装置に記憶しており、渋滞情報生成部26は、自身で算出した伝搬速度Jvを当該参照テーブルに当てはめ、現在生じている渋滞の状況レベル1〜4を判定する。
【0063】
図8に例示する参照テーブルでは、伝搬速度Jvの正負と、正負の各閾値との大小比較とにより、渋滞の状況レベルが4段階に区分されている。
このうち、状況レベル1では、伝搬速度Jvが正の閾値a(例えば、a=1km/h)以上の範囲であり、この場合、渋滞が拡大中であると判定される。また、状況レベル2では、伝搬速度Jvがa>Jv≧0の範囲にあり、この場合には、渋滞が緩やかに拡大中であると判定される。
【0064】
更に、状況レベル3では、伝搬速度Jvが0>Jv≧b(例えば、b=−1km/h)の範囲にあり、この場合には、渋滞が緩やかに縮小中であると判定される。また、状況レベル4では、伝搬速度Jvが負の閾値b以下の範囲であり、この場合には、渋滞が縮小中であると判定される。
【0065】
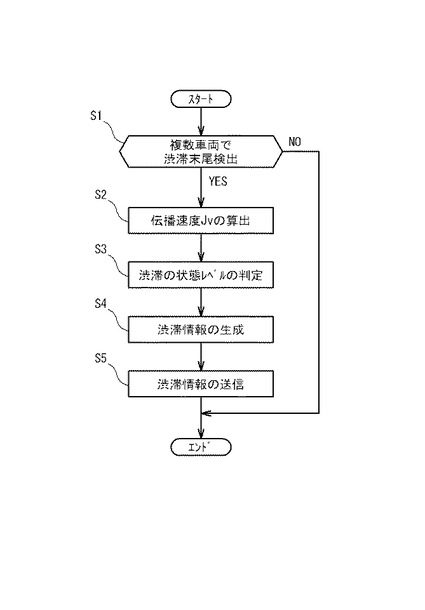
図9は、渋滞情報生成部26の処理内容を示すフローチャートである。
図9に示すように、渋滞情報生成部26は、同じ場所の渋滞ついて、渋滞判定部25が複数の車両3A,3Bに基づいて渋滞末尾を検出できたか否かを判定し(ステップS1)、この判定結果がYESである場合に、前記した渋滞の伝搬速度Jvを算出する(ステップS2)。
【0066】
次に、渋滞情報生成部26は、前記参照テーブル(図8)に基づいて渋滞の状況レベルを判定し(ステップS3)、ダウンリンク情報DSに含めるための渋滞情報を生成して(ステップS4)、そのダウンリンク情報DSを、第2通信部20を介して各車両3に送信する(ステップS5)。
上記渋滞情報には、渋滞が生じている区間と、その渋滞末尾の位置と、その渋滞の状況レベルが含まれる。従って、車載装置4のディスプレイ画面を通じて当該渋滞情報の内容をドライバに提示することにより、ドライバに渋滞を回避したルート選択を促すことができる。また、最適ルート生成部16Aにおいて、渋滞区間を回避した経路探索を行わせることにしてもよい。
【0067】
一方、本実施形態の渋滞情報生成部26は、リンク旅行時間の補正機能を有しており、補正後のリンク旅行時間をダウンリンク情報DSに含めて車両3に送信する。
具体的には、渋滞情報生成部26は、渋滞発生前のリンク旅行時間T0に対して、伝播速度Jvによって決定される前記状況レベル1〜3に対応して予め設定された第1係数Kvと、距離に比例して設定された第2係数Klとを乗算することにより、補正リンク旅行時間Thを算出する。
すなわち、補正リンク旅行時間Th=K1×K2×T0となる。
【0068】
ここで、第1係数Kvと第2係数Kvlとは、例えば、次のように設定される。
(1) 第1係数Kv
状況レベル1の場合は、Kv=2、状況レベル2及び3の場合は、Kv=1
(2) 第2係数Kl
K1=渋滞長Lv(距離との比例係数を1とする。)
【0069】
この場合、渋滞長Lvが1kmで、伝播速度Jvが2km/h(状況レベル1)であるとし、補正前のリンク旅行時間T0が10分であるとすると、補正リンク旅行時間は、10×2×1=20分となる。
このように、本実施形態の渋滞情報生成部26では、渋滞の伸縮の伝搬速度Jvに対応してリンク旅行時間T0を補正し、この補正後のリンク旅行時間Thをダウンリンク情報DSに含めて車両3に送信するようになっている。このため、車載装置4の車載コンピュータ16(最適ルート生成部16A)は、招来の渋滞状況の予測を加味した補正後のリンク旅行時間Thを利用した、より正確な最適経路の探索を行うことができる。
【0070】
〔その他の変形例〕
今回開示した各実施形態は本発明の例示であって制限的なものではない。本発明の範囲は、上記実施形態ではなく特許請求の範囲によって示され、特許請求の範囲とその構成と均等な意味及び範囲内での全ての変更が含まれる。
例えば、上記実施形態の渋滞判定部25において、判定区間MSiが自由走行区間FSであるか否かの判定を行う代わりに、判定区間MSが渋滞区間TS以外の非渋滞区間であるか否かを判定し、渋滞区間TSがその非渋滞区間の下流側に位置する場合に、当該渋滞区間TSの上流端を渋滞末尾と判定するようにしてもよい。
【0071】
また、上記実施形態では、予め割り当てられた所定の判定区間MSiに対して、自由走行区間FSか渋滞区間TSかの判定処理を行っているが、走行ルートRに対して自由走行区間FSとなる区間を先に設定し、この区間の終点を起点として、判定区間を動的に割り当てることにしてもよい。
更に、上記実施形態では、サーバ装置2と車載装置4との間の無線通信を、携帯電話機8で行っているが、この他に、例えば、光ビーコン、無線LAN、DSRC(Dedicated Short Range Communication )等の比較的エリアの狭い路車間通信で行うこともできる。
【0072】
上記実施形態では、サーバ装置2の処理コンピュータ18が渋滞判定を行っているが、各車両3に搭載された車載装置4が独自に当該渋滞判定経路を行うことにしてもよい。すなわち、本発明の渋滞判定装置は、車載装置4の車載コンピュータ16に組み込むことも可能である。
更に、上記実施形態では、サーバ装置2と複数の車載装置4とからなるナビゲーションシステム1を例示しているが、当該システム1の構成要素は車載装置4以外のものであってもよい。例えば、サーバ装置2とインターネット通信可能な携帯電話機やノートPC等の端末装置を、上記ナビゲーションシステム1の構成要素とすることもできる。
【0073】
また、プローブ情報は、車載装置4が生成する場合に限らず、運転者を含む搭乗者が所有する携帯電話機8等の携帯端末装置が生成してもよい。
更に、上記実施形態では、プローブ車両3の走行速度をプローブ情報に含めているが、走行速度については必ずしもプローブ情報に含まれていなくても良い。この場合、サーバ装置2のプローブ情報取得部24において、プローブ情報から抽出した走行位置と走行時刻とから、走行速度を算出するようにすればよい。
【図面の簡単な説明】
【0074】
【図1】ナビゲーションシステムの全体構成を示す概略構成図である。
【図2】ナビゲーションシステムの機能ブロック図である。
【図3】車載装置の構成を示す機能ブロック図である。
【図4】プローブ車両の走行距離と走行速度との関係を示すグラフである。
【図5】判定区間での平均速度の算出方法を示すためのグラフである。
【図6】渋滞判定部が行う判定処理を示すフローチャートである。
【図7】渋滞の伸縮判定の原理を示す説明図である。
【図8】渋滞の状況レベルを判定するための参照テーブルである。
【図9】渋滞情報生成部の処理内容を示すフローチャートである。
【符号の説明】
【0075】
1 ナビゲーションシステム
2 サーバ装置
3 プローブ車両
4 車載装置
5 交通情報センタ
6 イーサネット網
7 無線基地局
8 携帯電話機
18 処理コンピュータ(渋滞判定装置)
19 第1通信部
20 第2通信部
21 会員データベース
22 交通情報データベース
23 地図データベース
24 プローブ情報取得部(取得手段)
25 渋滞判定部(判定手段)
26 渋滞情報生成部(情報生成手段)
MSi 判定区間
FS 自由走行区間
TS 渋滞区間
【技術分野】
【0001】
本発明は、プローブ車両が生成した走行位置等を含むプローブ情報に基づいて、道路の渋滞を判定する渋滞判定装置、この装置が行う渋滞判定方法、及び、この方法を実行するためのコンピュータプログラムに関する。
【背景技術】
【0002】
地上に設置された計測装置で交通情報を計測する機器として、光ビーコン、超音波式車両感知器、ループ式車両感知器、画像感知器及び遠赤外センサが知られている。特に一般道路では、超音波式感知器が広く利用されており、幹線道路では、交差点からの距離をベースとした設置基準が決められている。
しかし、より詳細な情報をドライバに提供するという観点からすると、この設置基準は十分ではなく、特に道路の渋滞情報を上記機器で正確に計測するのは困難である。
【0003】
そこで、道路の渋滞情報を求める交通情報算出システムとして、動画撮影が可能なカメラを道路に設置し、このカメラで取得した道路の所定範囲の撮影画像を画像処理することにより、道路に発生した交通渋滞の状態や、交通渋滞の列の末尾を経時的に判定したり、その検出結果の経時変化に基づいて、交通渋滞の列が延伸するか減縮するかを判定したりするシステムが、既に知られている(特許文献1参照)。
【0004】
しかし、この従来の交通情報算出システムでは、撮影画像を画像処理して交通渋滞の状況等を判定するので、インフラ側にカメラの設置が必須な高価なシステムとなるし、カメラを設置していない道路の状況が分からないため、限られた場所での渋滞状況しか把握できない。
【特許文献1】特開2001−101569号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
一方、地上の計測機器を利用しない交通情報の収集方法として、プローブ車両が生成したプローブ情報を光ビーコンや携帯電話機等を通じて交通管制センタに送信し、このセンタにおいてリンク旅行時間を推定する技術が検討及び実験され、その一部が既に実用化されている。
上記プローブ情報には、プローブ車両の走行速度、走行位置及び走行時刻が含まれているため、例えば、プローブ車両の平均速度が、ある特定の区間において所定の閾値以下になる場合には、一応、この区間で渋滞が発生している可能性があると推定できる。
【0006】
しかし、ある区間でのプローブ車両の平均速度の低下は、走行途中で遭遇した交差点での信号待ちが原因であることもあり得るので、プローブ車両の平均速度に基づいて渋滞か否かを正確に判定するためには、交差点の信号切り替えタイミングとの関係を判定ロジックに含める必要があり、その判定ロジックが非常に複雑になる。
本発明は、このような問題点に鑑み、プローブ情報に基づく渋滞判定を簡単な判定ロジックで行うことができる渋滞判定装置等を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の渋滞判定装置(請求項1)は、プローブ車両が生成したプローブ情報に基づいて道路が渋滞か否かを判定するための渋滞判定装置であって、前記プローブ情報に基づいて前記プローブ車両の走行速度、走行位置及び走行時刻を取得する取得手段と、前記プローブ車両の走行経路に含まれる複数の判定区間のうち、低速閾値以下の前記走行速度での前記プローブ車両の走行が特定の前記判定区間において継続する場合に、当該判定区間を渋滞区間と判定する判定手段と、を備えていることを特徴とする。
【0008】
本発明の渋滞判定装置によれば、上記判定手段が、低速閾値以下の走行速度でのプローブ車両の走行(低速走行)が特定の判定区間において継続するか否かにより、当該判定区間が渋滞区間であるか否かを判定する。この場合、特定の判定区間の全域に渡ってプローブ車両の低速走行が継続しているなら、交差点の信号待ちが原因かどうかを判断するまでもなく、当該判定区間において渋滞が生じている蓋然性が高いと言える。
このため、本発明の渋滞判定装置によれば、走行経路に含まれる交差点の信号切り替えタイミングを考慮しなくても、特定の判定区間が渋滞区間であるか否かを判定でき、プローブ情報に基づく渋滞判定を簡単な判定ロジックで行うことができる。
【0009】
なお、「プローブ情報」とは、少なくとも車両の走行位置及び走行時刻を含む情報のことをいう。このプローブ情報には、走行速度が含まれていても良い。また、「プローブ車両」とは、上記プローブ情報を提供することができる車両のことをいう。
プローブ情報の生成は、例えば、ナビゲーションシステム等の車載装置や、運転者を含む搭乗者が所持する携帯電話等の携帯端末装置において行われる。
また、上記の通り、「プローブ情報」には、走行位置及び走行時刻のみが含まれ、走行速度は走行位置と走行時刻から算出する場合もある。従って、取得手段は、走行位置と走行時刻については、プローブ車両から直接取得するが、走行速度については、プローブ車両から直接取得しても良いし、走行位置と走行時刻とから算出することにより取得しても良い。
【0010】
本発明の渋滞判定装置において、前記判定手段は、前記渋滞区間の判定条件として、更に次の(a)又は(b)の条件、若しくは、これらの双方の条件を付加することにしてもよい(請求項2)。
(a) 前記判定区間を走行する前記プローブ車両による、加速閾値以上の加速回数が所定回数以上であること
(b) 前記判定区間を走行する前記プローブ車両による、減速閾値以下の減速回数が所定回数以上であること
【0011】
また、本発明の渋滞判定装置において、前記判定手段は、前記渋滞区間の判定条件として、更に次の(c)の条件を付加することにしてもよい(請求項3)。
(c) 前記判定区間を走行する前記プローブ車両による、加速閾値以上でかつ減速閾値以下である加減速ペアの回数が所定回数以上であること
【0012】
上記条件(a)〜(c)が渋滞区間の判定条件になる理由は、渋滞中の道路を低速走行する車両のドライバは、前方を走行する車両と衝突しないように、頻繁に加減速を繰り返す運転方法を採るのが経験則として認められ、この運転方法が行われる車両には、比較的短い時間内での加速度と減速度とが頻繁に発生するからである。
この場合、判定区間を走行中のプローブ車両の走行速度だけでなく、そのプローブ車両に発生した加速回数や減速回数によっても、判定区間が渋滞区間か否かを判定するので、渋滞区間の判定精度を向上することができる。
【0013】
一方、判定された渋滞区間が、上流側から順に判定される複数の判定区間のうちで最初に検出されたものであれば、当該渋滞区間の上流端が渋滞末尾であると考えられる。
そこで、本発明の渋滞判定装置において、前記判定手段として、前記渋滞区間が、前記渋滞区間と判定されない非渋滞区間の下流側に位置する場合に、当該渋滞区間の上流端を渋滞末尾と判定するものを採用すれば(請求項4)、渋滞区間を利用して渋滞末尾を簡単に判定できるようになる。
【0014】
また、本発明の渋滞判定装置において、前記判定手段として、前記複数の判定区間の中から、前記プローブ車両が渋滞でなく自由に走行可能な自由走行区間を判定し、前記渋滞区間が前記自由走行区間の下流側に位置する場合に、当該渋滞区間の上流端を渋滞末尾と判定するものを採用することもできる(請求項5)。
具体的には、前記判定手段は、前記複数の判定区間のうち、前記プローブ車両の平均速度が高速閾値以上となる当該判定区間を前記自由走行区間であると判定することができる(請求項6)。
【0015】
本発明の渋滞判定装置において、前記判定手段において、前記低速閾値は、前記判定区間における前記プローブ車両の平均速度に基づいて設定することが好ましく(請求項7)、また、前記高速閾値についても、前記判定区間における前記プローブ車両の平均速度に基づいて設定することが好ましい(請求項8)。
その理由は、ある道路を走行する車両の平均速度は、道路の車線数や幅員、或いは、近隣施設の有無や都心又は地方などの道路条件の違いによって変化するので、判定区間における平均速度に基づいて閾値を設定すれば、その閾値を一律に設定する場合に比べて、判定区間となった道路固有の閾値を個別にかつ適切に設定することができ、渋滞区間や自由走行区間の判定をより正確に行うことができるからである。
【0016】
ところで、プローブ車両の平均速度と高速閾値とを対比して前記自由走行区間を判定する場合において、交通信号による停止のために走行速度がゼロとなる場合をプローブ車両の平均速度の算出データとして使用すると、信号待ち等の渋滞以外の原因のためにプローブ車両の平均速度が低くなり、自由走行区間の判定精度に影響が生じる。
そこで、前記判定手段は、交通信号による停止のためにゼロとなった前記走行速度による影響を軽減するように、前記自由走行区間の判定のための平均速度を算出することが好ましい(請求項9)。
【0017】
また、実際に渋滞が生じている場合であっても、プローブ車両の走行速度が瞬間的に低速閾値を超えてから低速閾値以下に戻る急変動が生じる現象が、経験的に認められる。従って、このような走行速度の急変動については、渋滞区間の判定の際に除外しないと、実際に渋滞している判定区間を渋滞でないと誤判定することになる。
そこで、本発明の渋滞判定装置において、前記判定手段は、瞬間的に前記低速閾値を超えかつ当該低速閾値以下に戻る急激な前記走行速度の変動値を、前記渋滞区間の判定のためのデータから除外することが好ましい(請求項10)。
【0018】
本発明の渋滞判定装置において、前記取得手段は、複数のプローブ車両からそれぞれプローブ情報を取得することができ、前記判定手段は、複数のプローブ情報に基づいて同じリンクについての渋滞末尾の位置と時刻を検出することができる。
そこで、本発明の渋滞判定装置は、同じリンクについて前記判定手段が判定した複数の前記渋滞末尾の位置と時刻とに基づいて、前記渋滞の伸縮の伝搬速度を求める情報生成手段を、更に備えていること好ましい(請求項11)。
この場合、上記情報生成手段において、前記渋滞の伸縮の伝搬速度に基づいて前記リンクのリンク旅行時間を補正するようにすれば(請求項12)、将来発生し得る渋滞の伸縮を加味した正確なリンク旅行時間を求めることができる。
【0019】
本発明の渋滞判定方法(請求項13)は、本発明の渋滞判定装置(請求項1)が行う渋滞の判定方法であって、当該渋滞判定装置(請求項1)と同様の作用効果を奏する。
本発明のコンピュータプログラム(請求項14)は、本発明の渋滞判定装置(請求項1)が行う判定処理をコンピュータに実行させるためのコンピュータプログラムであって、当該渋滞判定装置(請求項1)と同様の作用効果を奏する。
【発明の効果】
【0020】
以上の通り、本発明によれば、走行経路に含まれる交差点の信号切り替えタイミングを考慮しなくても、特定の判定区間が渋滞区間であるか否かを判定できるので、プローブ情報に基づく渋滞判定を簡単な判定ロジックで行うことができる。
【発明を実施するための最良の形態】
【0021】
〔システムの全体構成〕
図1は、本発明の渋滞判定装置を有するナビゲーションシステムの全体構成を示す概略構成図であり、図2は、同システムの機能ブロック図である。
図1及び図2に示すように、本実施形態のナビゲーションシステム1は、サーバ装置2と、複数のプローブ車両3にそれぞれ搭載された車載装置4とから構成されている。
なお、本明細書において、「車両」とは、自動車、原動機付き自転車、軽車両及びトロリーバス等のことをいう。また、「車載装置」とは、車両に搭載されており、その搭乗者に対して目的地までの経路を案内するいわゆるナビゲーション装置のことをいう。
【0022】
このナビゲーションシステム1は、予め入会登録された会員(ユーザ)のプローブ車両3自体をセンサとして、各車両3からサーバ装置2が情報収集し、メンバー間で相互に情報提供し合って運用することにより、サーバ装置2が各会員に対して有用な交通情報を提供するようにしたものである。
従って、本システム1によれば、通常のVICS(登録商標:Vehicle Information and Communication System)情報とともに、このVICS情報に含まれていないより詳細かつ動的な交通情報を、各会員の車両3に提供することができる。
【0023】
本システム1のサーバ装置2は、専用の通信回線を介して交通情報センタ5に接続されており、必要に応じてVICS情報を交通情報センタ5から入手している。また、サーバ装置2は、インターネット網6を通じて携帯電話機8の無線基地局7と双方向で通信可能である。
各車両3の車両装置4は、搭乗者の携帯端末である携帯電話機8を介して、無線基地局7と双方向で通信可能であり、無線基地局7は上記インターネット網6に接続されている。このため、各車両3の車両装置4は、ほぼリアルタイムでサーバ装置2に対して情報を送受信可能となっている。
【0024】
〔車載装置の構成〕
図3は、プローブ車両3に搭載される車載装置4の構成を示す機能ブロック図である。
各プローブ車両3の車載装置4は、車速センサ10と、方位センサ11と、加速度センサ12と、GPS(Global Positioning System )受信機13と、タッチパネル等よりなる入力装置14と、ディスプレイ及びスピーカ等よりなる出力装置15と、車載コンピュータ16とを含む。
【0025】
車載コンピュータ16は、HDDやメモリ等よりなる記憶装置と、この記憶装置から各種のコンピュータプログラムを読み出して実行する演算装置とを含んでいる。
車載コンピュータ16の記憶装置には、道路地図データを含む地図データベースが記録されており、車載コンピュータ16は、記憶装置内の地図データを、GPS受信機13で検出した車両3の現在位置とマッチングさせ、出力装置15のディスプレイ画面上に表示可能となっている。
【0026】
車載コンピュータ16の記憶装置には、上記地図データベースの他に、演算装置が実行する各種のコンピュータプログラムが格納されており、車載コンピュータ16は、当該コンピュータプログラムを用いて演算装置が実行する機能部として、車両3の最適経路の探索処理を行うルート生成部16Aと、サーバ装置2にアップロードするプローブ情報を生成するプローブ情報生成部16Bとを備えている。
【0027】
このうち、ルート生成部16Aは、入力装置14で入力された所定の旅行条件に基づいて、車両3の最適な走行経路を演算するものであり、例えば、出発地点から目的地点までの最小のリンクコストとなる最適経路を探索する、ダイクストラ法又はポテンシャル法を利用した経路探索ロジックを実行可能である。
入力装置14において入力可能な所定の旅行条件としては、出発地点(現在地点を含む。)や目的地点のほか、経由地や優先経路(一般道路優先又は有料道路優先や、距離優先又は道幅優先)等がある。
【0028】
車載コンピュータ16の記憶装置が記憶する地図データベースには、交差点データとリンクデータとが含まれている。
交差点データは、交差点IDと交差点位置とを対応付けたデータである。また、リンクデータは、特定リンクのリンクIDに対して、特定リンクの始点・終点・補間点の位置、特定リンクの始点に接続するリンクID、特定リンクの終点に接続するリンクID、及び、特定リンクのリンクコストを対応付けたデータよりなる。
【0029】
リンクコストは、例えば、特定リンクとその終点に接続するリンクの組み合わせの数だけ用意されており、特定リンクの始点に進入してから当該特定リンクの終点を退出し、次に接続するリンクの始点に進入するまでに要する時間として設定されている。
すなわち、リンクコストには、特定リンクの始点から終点までを走行するのに要するコスト(時間)と、その特定リンクの終点から次のリンクの始点までを走行するのに要するコスト(時間)、つまり、交差点通過に要するコストが含まれている。
【0030】
また、リンクコストは、平日、土曜、日曜及び祝日といった日種別ごとに、現時点から1日先までの5分毎のデータ(すなわち、現時点のリンクコスト、5分先のリンクコスト、10分先のリンクコスト、… …、23時間55分先のリンクコスト、24時間先のリンクコスト)が用意されている。これらのデータは、例えば、ダウンリンク情報DSに含まれる交通情報データベース23のVICS情報等に基づいて作成される。
【0031】
一方、車載コンピュータ16のプローブ情報生成部16Bは、所定時間ごと(例えば、0.1秒毎)又は所定距離ごと(例えば、5m毎)に、自車の走行速度、走行位置、走行時刻及び加減速度に関するデータを各種センサ10〜13から取得しており、これらのデータを含むプローブ情報を生成する。
また、情報生成部16Bが生成した上記プローブ情報は、車載コンピュータ16の記憶装置の一次記憶領域(メモリ)にいったん記憶され、リアルタイム或いは所定時間(例えば、1分ごと)に、アップリンク情報USに含めてサーバ装置2に送信される。
【0032】
なお、車載コンピュータ16の記憶装置の一次記憶領域には、サーバ装置2から受信するダウンリンク情報DSも保存することができる。
このダウンリンク情報DSに、サーバ装置2で生成された渋滞情報やその他の交通規制等の交通情報が含まれている場合には、ルート生成部16Aは、それらの交通情報を、最適経路探索の演算に利用する。
【0033】
〔サーバ装置の内部構成〕
図2に示すように、本実施形態のサーバ装置2は、ワークステーション等よりなる処理コンピュータ18と、この処理コンピュータ18に接続された通信インターフェースよりなる第1及び第2通信部19,20と、各種データベース21〜23とから構成されている。
【0034】
このうち、第1通信部19は、専用回線で交通情報センタ5に接続されている。また、第2通信部20は、インターネット網6を介して前記無線基地局7に接続され、この無線基地局7と車両3の搭乗者の携帯電話機8との間の無線通信を通じて、車載装置4との間で情報の送受信を行う。
各データベース21〜23のうち、会員データベース21には、当該システム1に参加する登録会員の識別情報が保存されている。処理コンピュータ18は、会員データベース21に記録されている特定の登録会員の車載装置4から受信したプローブ情報に基づき、後述する渋滞判定処理を実行可能である。
【0035】
交通情報データベース22には、第1通信部19が受信した交通情報センタ5からのVICS情報が保存される。このVICS情報は、処理コンピュータ18がセンタ5からのVICS情報を抽出するごとに更新され、ほぼ最新の情報が保持される。
また、交通情報データベース22には、特定の登録会員から受信したプローブ情報に含まれる、走行速度、走行位置、走行時刻及び加減速度に関するデータも保存される。なお、地図データベース23には、前記車載コンピュータ16の場合と同様に、交差点データとリンクデータとを含む道路地図データが含まれている。
【0036】
〔処理コンピュータの構成及び機能〕
処理コンピュータ18は、HDDやメモリ等よりなる記憶装置と、この記憶装置から各種のコンピュータプログラムを読み出して実行する演算装置とを含んでいる。
上記各コンピュータプログラムのうちの1つは、前記プローブ情報に基づいて道路に渋滞が生じている否かを判定する処理を行うものであり、この判定処理用のプログラムの機能部分として、プローブ情報取得部(取得手段)24と、渋滞判定部(判定手段)25と、渋滞情報生成部(情報生成手段)26とを含んでいる。
【0037】
このうち、プローブ情報取得部25は、インターネット6を通じて第2通信部20から得られる各会員のプローブ車両3が生成したプローブ情報を、その車両IDごとに常時取得している。また、情報取得部25は、プローブ情報に含まれる走行速度、走行位置、走行時刻及び加減速度に関するデータを、いったん交通情報データベース23に記憶させる。
一方、渋滞判定部25は、特定会員の車両IDを有するプローブ車両3についてのプローブ情報に基づいて、道路に渋滞が生じているか否かの判定処理を行う。以下、この判定処理について、説明する。
【0038】
〔渋滞判定処理の原理と手順〕
図4は、渋滞判定部25による渋滞判定の原理を説明するための、プローブ車両3の走行距離Xと走行速度Vとの関係を示すグラフである。
ここで、図4において、走行ルートRは、あるプローブ車両3の走行経路の一部を形成するルートであり、MSi(i=1〜6)は、この走行ルートRを、渋滞判定に適した所定の判定距離(例えば、500m)で分割した判定区間を示している。この判定距離は、1回の信号待ちで生じる待ち行列長(例えば、150m)よりも長い距離に設定されているものとする。
【0039】
また、図4の走行ルートRにおいて、FSは、プローブ車両3が渋滞でなく自由に走行可能な自由走行区間を示し、TSは、プローブ車両3が所定速度以下でののろのろ運転(停止も含む。)でしか走行できない渋滞区間を示している。
更に、図4に示すグラフにおいて、V1は、判定区間MSiが自由走行区間FSであるか否かを判定するための高速閾値であり、V2は、判定区間MSiが渋滞区間TSであるか否かを判定するための低速閾値である。
【0040】
上記各閾値V1,V2は、予め設定された固定値であってもよいが、本実施形態では、各車両3のプローブ情報に含まれる走行速度Vから求めるリンク平均速度VLから動的に設定している。
例えば、ある特定のリンクのリンク長が150mであり、その平均コストが10秒であるとすると、リンク平均速度VLは54km/hとなる。
そこで、この平均速度54km/hに所定の係数を掛けることにより、V1,V2を設定することができる。
【0041】
なお、ここでは、V1に対する係数αを1.0、V2に対する係数βを0.6する。従って、V1及びV2はそれぞれ次の値となる。
V1=α×VL=54km/h
V2=β×VL=32.4km/h
このように、本実施形態において、各閾値V1,V2をリンク平均速度VLに基づいて動的に設定したのは、次の理由による。
すなわち、道路を走行する車両3の平均速度は、道路の車線数や幅員、近隣施設の有無や都心又は地方などの道路条件の違いによって変化する。従って、各閾値V1,V2を固定値にすると、道路条件の相違による平均速度の変化に対応できず、判定の精度が悪くなると考えられる。そこで、本実施形態では、判定区間MSiにおけるリンク平均速度VLに対する割合で各閾値V1,V2を動的に設定することにより、判定区間MSiの道路条件に適合した閾値V1,V2を個別に求めるようにしている。
図4のグラフは、上記走行ルートRを走行するプローブ車両3の、当該走行ルートRに対する走行距離X(横軸)と走行速度V(縦軸)の関係を示している。
【0042】
例えば、図4のグラフでは、走行ルートRに含まれるすべての判定区間MSi(i=1〜5)のうち、最初の判定区間MS1と最後の判定区間MS5においては、当該区間MS1,MS5のほぼ全長に渡って走行速度Vが高速閾値V1を超えているので、この区間MS1,MS5では、プローブ車両3が自由に走行していた可能性が高いと言える。
一方、2番目の判定区間MS2から4番目の判定区間MS4においては、当該区間MS2〜MS4の全長に渡って走行速度Vが低速閾値V2を下回っているので(円C内の瞬間値を除く。)、この区間MS2〜MS4では、プローブ車両3で低速走行(のろのろ運転)が行われており、渋滞が発生している可能性が高いと言える。
【0043】
そこで、本実施形態の渋滞判定部25は、次の手順(1)〜(5)を実行して、走行ルートRに含まれる渋滞区間TSの有無を判定し、その渋滞末尾及び渋滞終点を検出する。
(1) 特定のプローブ車両3について、走行ルートRに含まれるプローブ情報を収集し、走行ルートRに対して複数の判定区間MSi(i=1〜5)を割り当てる。
(2) 各判定区間MSiについて、その上流側から順に、次の判定条件(ア)及び(イ)に基づき、当該判定区間MSiが自由走行区間FS又は渋滞区間TSのいずれであるかを判定する。
【0044】
(ア) 判定区間MSi(i=1〜5)におけるプローブ車両3の「平均速度Vm」が高速閾値V1以上である場合には、自由走行区間FSと判定する。
(イ) 判定区間MSi(i=1〜5)において、プローブ車両3の「走行速度V」(瞬時値)が高速閾値V2以下である状態が継続している場合には、渋滞区間TSと判定する。
【0045】
(3) 隣接する2つの判定区間MSi,MSi+1において、上流側の判定区間MSi(図4ではMS1)が自由走行区間FSであり、下流側の判定区間MSi+1(図4ではMS2)が渋滞区間TSである場合には、その下流側の判定区間MSi+1の上流端(図4の地点B)を、渋滞末尾とする。
(4) 最初の渋滞区間TSの検出以降も、次に自由走行区間FS(図4では判定区間MS5)が検出されるまで、上流側から順に上記(2)の区間判定を繰り返す。
(5) 次の自由走行区間FSが検出された場合に、これに隣接する上流側の渋滞区間TSの下流端(図4の地点E)を、渋滞終点とする。
【0046】
〔渋滞区間の判定条件の強化〕
ところで、渋滞中の道路を低速走行する車両3のドライバは、その前方を走行する車両3と衝突しないように、頻繁に加減速を繰り返す運転方法を採るのが一般的であり、この場合、車両3には、比較的短い時間内での加速度と減速度とが頻繁に発生することになる(図4のグラフにおける、地点Bから地点Eまでに見られる走行速度Vの上下微変動)。
従って、プローブ車両3に生じる加減速回数の頻度も、渋滞区間TSの判定条件となり得ると考えられる。
【0047】
そこで、本実施形態の渋滞判定部25では、渋滞区間TSの判定条件として、走行速度Vに基づく前記判定条件(イ)に加えて、次の判定条件(ウ)を更に有している。
(ウ) 判定区間MSiを走行するプローブ車両3による、ある加速閾値(例えば、毎秒5km/h)以上でかつ減速閾値(例えば、毎秒3km/h)以下である加減速ペアの回数が、所定回数(例えば、10回)以上であること。
なお、上記加減速ペアの回数を用いる代わりに、加速閾値以上の加速回数が所定回数以上であること、又は、減速閾値以下の減速回数が所定回数以上であることのいずれか一方を採用してもよく、若しくは、これらの双方を採用することにしてもよい。
【0048】
また、実際の渋滞区間では、前方を走行する車両3との車間距離を詰めるために、急発進の直後に急停車する車両3もあり、この場合の走行速度Vは、例えば図4の円C内に示すように、瞬間的かつ急激に低速閾値V2を超え、再び、低速閾値V2以下に急降下する挙動になる。
従って、かかる瞬間的な走行速度Vの変動については、渋滞区間TSの判定の際に除外しないと、実際には渋滞している判定区間MSiを渋滞でないと誤判定してしまう。そこで、本実施形態の渋滞判定部25は、瞬間的に低速閾値V2を超えているような走行速度Vについては、渋滞区間TSの判定のためのデータから除外するようになっている。
【0049】
〔自由走行区間の判定に用いる平均速度〕
プローブ車両3の平均速度Vmと高速閾値V1とを対比して自由走行区間FSであるか否かを判定する(前記判定条件(ア))に当たって、交通信号による停止のために走行速度Vがゼロとなる場合を、プローブ車両3の平均速度Vmの算出データに含めると、渋滞以外の原因のためにプローブ車両3の平均速度Vmが必要以上に低くなってしまい、自由走行区間FSの判定精度が悪くなる。
【0050】
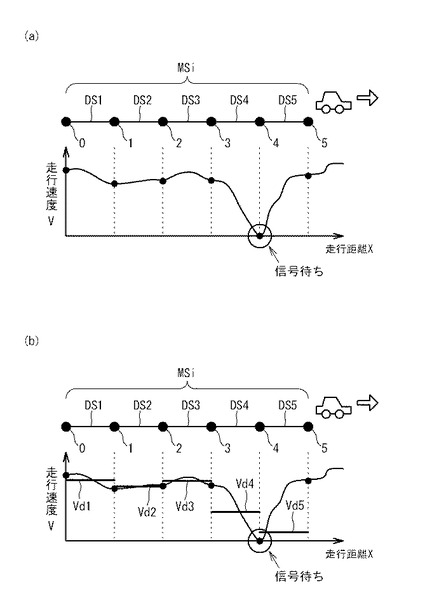
そこで、本実施形態の渋滞判定部25は、交通信号による停止のためにゼロとなった走行速度Vが、自由走行区間FSの判定条件(ア)で用いる平均速度Vmに余り影響しない算出方法を採用している。図5は、その算出方法を示すグラフである。
図5に示すように、ここでは、ある判定区間MSiが、同じ距離の複数の分割区間DSj(j=1〜5)に分割されており、分割区間DS4と分割区間DS5の間のノード4において、交通信号による停止のために走行速度Vがゼロとなっているものとする。
【0051】
そして、図5(a)に示す算出方法では、各ノード1〜5での走行速度Vの瞬間値を用いて、判定区間MSiにおける車両3の平均速度Vmを算出するが、この際、ノード4での瞬間値を除外し、残りのノード1,2,3,5の瞬間値を用いて、平均速度Vmを算出するようになっている。
一方、図5(b)に示す算出方法では、各分割区間DSjの分割平均速度Vdj(j=1〜5)をそれぞれ算出し、この分割平均速度Vdjの更に平均をとって、判定区間MSiにおける車両3の平均速度Vmとしている。
【0052】
〔渋滞判定のフローチャート〕
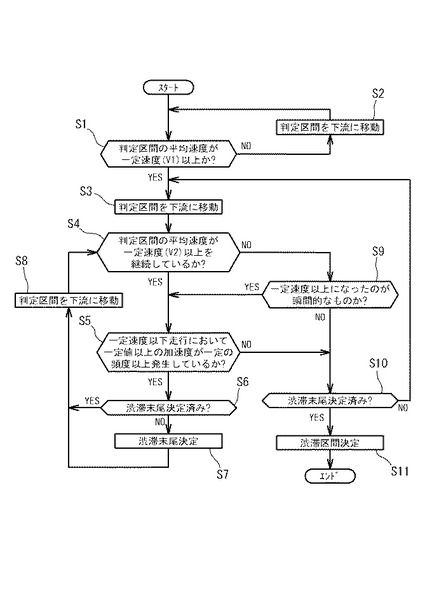
図6は、上記渋滞判定部25が行う判定処理を示すフローチャートである。
図6に示すように、渋滞判定部25は、まず、最初の判定区間MS1での平均速度Vmが高速閾値V1以上となるか否か(判定条件(ア))を判定する(ステップS1)。
この判定結果がNOである場合には、渋滞判定部25は、判定区間MSiを下流側に1ずつ移動し、同じ判定を繰り返す(ステップS2)。
【0053】
ある判定区間MSiについての上記判定結果がYESの場合には、渋滞判定部25は、判定区間MSiを1つ下流側に移動した上で(ステップS3)、その下流側の判定区間MSiの全域において、車両3の走行速度Vが低速閾値V2となる状態が継続しているか否か(判定条件(イ))を判定する(ステップS4)。
この判定結果がYESである場合には、渋滞判定部25は、更に、判定区間MSiを走行する車両3において、所定の加減速動作が所定頻度以上で発生しているか否か(判定条件(ウ))を判定する(ステップS5)。
【0054】
この判定結果がYESである場合には、渋滞判定部25は、当該判定区間MSiについての渋滞末尾が決定済みか否かを判定し(ステップS6)、決定済みでない場合には、当該判定区間MSiでの渋滞末尾を決定した上で(ステップS7)、判定区間MSiを1つ下流側に移動して(ステップS8)、前記ステップS4に戻る。
また、当該判定区間MSiについての渋滞末尾が既に決定済みである場合には、その末尾決定を行わずに、判定区間MSiを1つ下流側に移動して(ステップS8)、前記ステップS4に戻る。
【0055】
一方、前記ステップS4(判定条件(イ))での判定結果がNOである場合には、渋滞判定部25は、判定区間MSiを走行する車両3の走行速度Vが低速閾値V2を超えた原因が瞬間的なものか否かを判定し(ステップS9)、この判定結果がYESである場合には、当該ステップS4の判定結果をYESに変更する。
上記ステップS5での判定結果がNOである場合、又は、上記ステップS9での判定結果がNOである場合には、渋滞判定部25は、渋滞末尾が決定済みか否かを判定する(ステップS10)。
【0056】
上記ステップS10での判定結果がNOである場合には、渋滞判定部25は、判定処理をステップS3の手前に戻し、ステップS10でのその判定結果がYESである場合には、渋滞判定部25は、渋滞区間TSを決定して(ステップS11)、処理を終了する。
【0057】
このように、本実施形態の処理コンピュータ18によれば、各判定区間MSiにおいて、低速閾値V2以下の走行速度Vでのプローブ車両3の走行(低速走行)が継続するか否かにより、当該判定区間MSiが渋滞区間TSであるか否かを判定するので、走行経路に含まれる交差点の信号切り替えタイミングを考慮しなくても、特定の判定区間MSiが渋滞区間TSであるか否かを判定することができる。このため、プローブ情報に基づく渋滞判定を簡単な判定ロジックで行うことができる。
【0058】
〔渋滞情報生成部の処理内容〕
次に、図7〜図9を参照しつつ、前記渋滞情報生成部26の処理内容を説明する。
本実施形態の渋滞情報生成部26は、前記渋滞判定部25が、複数のプローブ車両3からのプローブ情報に基づいて同じ渋滞を検出していることを前提として、その渋滞末尾の伸縮状態と、その渋滞の伸縮の伝搬速度を算出する。
【0059】
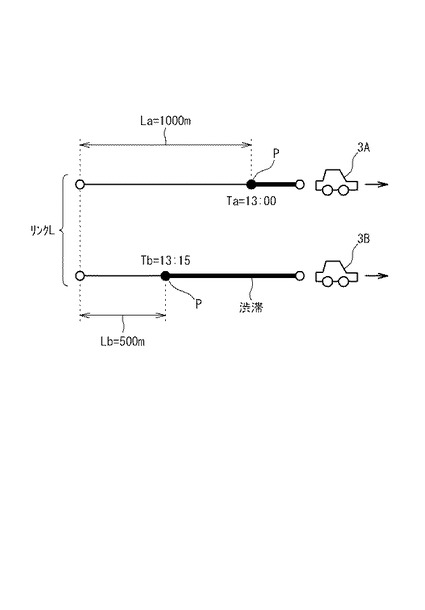
図7は、渋滞の伸縮判定の原理を示す説明図である。
図7に示す例では、同じリンクLについて、車両3Aとこれと別の車両3Bのプローブ情報に基づいて、それぞれ渋滞末尾Pが検出されているものとする。
そして、車両3Aでは、時刻Ta(=13:00)に渋滞末尾Pが判定され、その末尾Pの位置がリンクLの始端から距離La(=1000m)の位置であったとし、車両3Bでは、時刻Tb(=13:15)に渋滞末尾Pが判定され、その末尾Pの位置がリンクLの始端から距離Lb(=500m)の位置であったする。
【0060】
この場合、時刻Taから時刻Tbまでの15分の間に、渋滞末尾Pの位置が500m(=La−Lb)だけ上流側に移動しているので、このリンクLに生じた渋滞は、延伸中であると判断される。このように、Ta<Tbの場合において、La>Lbであれば、リンクLに生じている渋滞が延伸していると判断することができる。
逆に、La<Lbであれば、リンクLに生じた渋滞は減縮していると判断することができる。
【0061】
そこで、本実施形態の渋滞情報生成部26は、渋滞の延伸又は減縮の伝搬速度をJvとして、この伝搬速度Jvを次の式に基づいて算出する。
Jv=(La−Lb)/(Tb−Ta)
なお、図7の例では、渋滞が15分で500m拡大しているので、上記伝搬速度Jvは2km/hとなる。
【0062】
〔渋滞の状況レベル〕
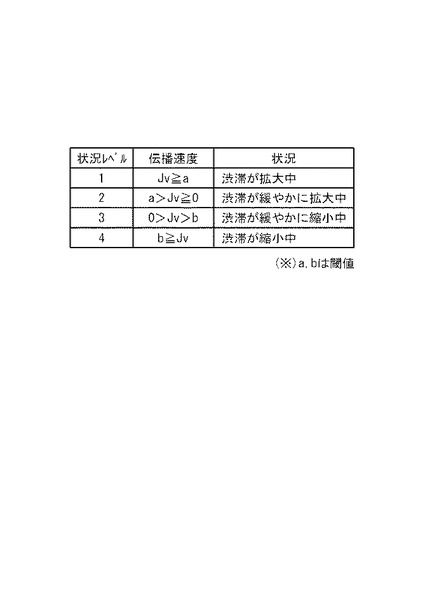
図8は、上記伝搬速度Jvに対応する渋滞の状況レベルを判定するための、参照テーブル(LUT)の一例を示している。
本実施形態の処理コンピュータ18は、この図8に示す参照テーブルを記憶装置に記憶しており、渋滞情報生成部26は、自身で算出した伝搬速度Jvを当該参照テーブルに当てはめ、現在生じている渋滞の状況レベル1〜4を判定する。
【0063】
図8に例示する参照テーブルでは、伝搬速度Jvの正負と、正負の各閾値との大小比較とにより、渋滞の状況レベルが4段階に区分されている。
このうち、状況レベル1では、伝搬速度Jvが正の閾値a(例えば、a=1km/h)以上の範囲であり、この場合、渋滞が拡大中であると判定される。また、状況レベル2では、伝搬速度Jvがa>Jv≧0の範囲にあり、この場合には、渋滞が緩やかに拡大中であると判定される。
【0064】
更に、状況レベル3では、伝搬速度Jvが0>Jv≧b(例えば、b=−1km/h)の範囲にあり、この場合には、渋滞が緩やかに縮小中であると判定される。また、状況レベル4では、伝搬速度Jvが負の閾値b以下の範囲であり、この場合には、渋滞が縮小中であると判定される。
【0065】
図9は、渋滞情報生成部26の処理内容を示すフローチャートである。
図9に示すように、渋滞情報生成部26は、同じ場所の渋滞ついて、渋滞判定部25が複数の車両3A,3Bに基づいて渋滞末尾を検出できたか否かを判定し(ステップS1)、この判定結果がYESである場合に、前記した渋滞の伝搬速度Jvを算出する(ステップS2)。
【0066】
次に、渋滞情報生成部26は、前記参照テーブル(図8)に基づいて渋滞の状況レベルを判定し(ステップS3)、ダウンリンク情報DSに含めるための渋滞情報を生成して(ステップS4)、そのダウンリンク情報DSを、第2通信部20を介して各車両3に送信する(ステップS5)。
上記渋滞情報には、渋滞が生じている区間と、その渋滞末尾の位置と、その渋滞の状況レベルが含まれる。従って、車載装置4のディスプレイ画面を通じて当該渋滞情報の内容をドライバに提示することにより、ドライバに渋滞を回避したルート選択を促すことができる。また、最適ルート生成部16Aにおいて、渋滞区間を回避した経路探索を行わせることにしてもよい。
【0067】
一方、本実施形態の渋滞情報生成部26は、リンク旅行時間の補正機能を有しており、補正後のリンク旅行時間をダウンリンク情報DSに含めて車両3に送信する。
具体的には、渋滞情報生成部26は、渋滞発生前のリンク旅行時間T0に対して、伝播速度Jvによって決定される前記状況レベル1〜3に対応して予め設定された第1係数Kvと、距離に比例して設定された第2係数Klとを乗算することにより、補正リンク旅行時間Thを算出する。
すなわち、補正リンク旅行時間Th=K1×K2×T0となる。
【0068】
ここで、第1係数Kvと第2係数Kvlとは、例えば、次のように設定される。
(1) 第1係数Kv
状況レベル1の場合は、Kv=2、状況レベル2及び3の場合は、Kv=1
(2) 第2係数Kl
K1=渋滞長Lv(距離との比例係数を1とする。)
【0069】
この場合、渋滞長Lvが1kmで、伝播速度Jvが2km/h(状況レベル1)であるとし、補正前のリンク旅行時間T0が10分であるとすると、補正リンク旅行時間は、10×2×1=20分となる。
このように、本実施形態の渋滞情報生成部26では、渋滞の伸縮の伝搬速度Jvに対応してリンク旅行時間T0を補正し、この補正後のリンク旅行時間Thをダウンリンク情報DSに含めて車両3に送信するようになっている。このため、車載装置4の車載コンピュータ16(最適ルート生成部16A)は、招来の渋滞状況の予測を加味した補正後のリンク旅行時間Thを利用した、より正確な最適経路の探索を行うことができる。
【0070】
〔その他の変形例〕
今回開示した各実施形態は本発明の例示であって制限的なものではない。本発明の範囲は、上記実施形態ではなく特許請求の範囲によって示され、特許請求の範囲とその構成と均等な意味及び範囲内での全ての変更が含まれる。
例えば、上記実施形態の渋滞判定部25において、判定区間MSiが自由走行区間FSであるか否かの判定を行う代わりに、判定区間MSが渋滞区間TS以外の非渋滞区間であるか否かを判定し、渋滞区間TSがその非渋滞区間の下流側に位置する場合に、当該渋滞区間TSの上流端を渋滞末尾と判定するようにしてもよい。
【0071】
また、上記実施形態では、予め割り当てられた所定の判定区間MSiに対して、自由走行区間FSか渋滞区間TSかの判定処理を行っているが、走行ルートRに対して自由走行区間FSとなる区間を先に設定し、この区間の終点を起点として、判定区間を動的に割り当てることにしてもよい。
更に、上記実施形態では、サーバ装置2と車載装置4との間の無線通信を、携帯電話機8で行っているが、この他に、例えば、光ビーコン、無線LAN、DSRC(Dedicated Short Range Communication )等の比較的エリアの狭い路車間通信で行うこともできる。
【0072】
上記実施形態では、サーバ装置2の処理コンピュータ18が渋滞判定を行っているが、各車両3に搭載された車載装置4が独自に当該渋滞判定経路を行うことにしてもよい。すなわち、本発明の渋滞判定装置は、車載装置4の車載コンピュータ16に組み込むことも可能である。
更に、上記実施形態では、サーバ装置2と複数の車載装置4とからなるナビゲーションシステム1を例示しているが、当該システム1の構成要素は車載装置4以外のものであってもよい。例えば、サーバ装置2とインターネット通信可能な携帯電話機やノートPC等の端末装置を、上記ナビゲーションシステム1の構成要素とすることもできる。
【0073】
また、プローブ情報は、車載装置4が生成する場合に限らず、運転者を含む搭乗者が所有する携帯電話機8等の携帯端末装置が生成してもよい。
更に、上記実施形態では、プローブ車両3の走行速度をプローブ情報に含めているが、走行速度については必ずしもプローブ情報に含まれていなくても良い。この場合、サーバ装置2のプローブ情報取得部24において、プローブ情報から抽出した走行位置と走行時刻とから、走行速度を算出するようにすればよい。
【図面の簡単な説明】
【0074】
【図1】ナビゲーションシステムの全体構成を示す概略構成図である。
【図2】ナビゲーションシステムの機能ブロック図である。
【図3】車載装置の構成を示す機能ブロック図である。
【図4】プローブ車両の走行距離と走行速度との関係を示すグラフである。
【図5】判定区間での平均速度の算出方法を示すためのグラフである。
【図6】渋滞判定部が行う判定処理を示すフローチャートである。
【図7】渋滞の伸縮判定の原理を示す説明図である。
【図8】渋滞の状況レベルを判定するための参照テーブルである。
【図9】渋滞情報生成部の処理内容を示すフローチャートである。
【符号の説明】
【0075】
1 ナビゲーションシステム
2 サーバ装置
3 プローブ車両
4 車載装置
5 交通情報センタ
6 イーサネット網
7 無線基地局
8 携帯電話機
18 処理コンピュータ(渋滞判定装置)
19 第1通信部
20 第2通信部
21 会員データベース
22 交通情報データベース
23 地図データベース
24 プローブ情報取得部(取得手段)
25 渋滞判定部(判定手段)
26 渋滞情報生成部(情報生成手段)
MSi 判定区間
FS 自由走行区間
TS 渋滞区間
【特許請求の範囲】
【請求項1】
プローブ車両が生成したプローブ情報に基づいて道路が渋滞か否かを判定するための渋滞判定装置であって、
前記プローブ情報に基づいて前記プローブ車両の走行速度、走行位置及び走行時刻を取得する取得手段と、
前記プローブ車両の走行経路に含まれる複数の判定区間のうち、低速閾値以下である前記走行速度での前記プローブ車両の走行が特定の前記判定区間において継続する場合に、当該判定区間を渋滞区間と判定する判定手段と、を備えていることを特徴とする渋滞判定装置。
【請求項2】
前記判定手段は、前記渋滞区間の判定条件として、更に次の(a)又は(b)の条件、若しくは、これらの双方の条件を有する請求項1に記載の渋滞判定装置。
(a) 前記判定区間を走行する前記プローブ車両による、加速閾値以上の加速回数が所定回数以上であること
(b) 前記判定区間を走行する前記プローブ車両による、減速閾値以下の減速回数が所定回数以上であること
【請求項3】
前記判定手段は、前記渋滞区間の判定条件として、更に次の(c)の条件を有する請求項1に記載の渋滞判定装置。
(c) 前記判定区間を走行する前記プローブ車両による、加速閾値以上でかつ減速閾値以下である加減速ペアの回数が所定回数以上であること
【請求項4】
前記判定手段は、前記渋滞区間が、前記渋滞区間と判定されない非渋滞区間の下流側に位置する場合に、当該渋滞区間の上流端を渋滞末尾と判定する請求項1〜3のいずれか1項に記載の渋滞判定装置。
【請求項5】
前記判定手段は、前記複数の判定区間の中から、前記プローブ車両が渋滞でなく自由に走行可能な自由走行区間を判定し、
前記渋滞区間が前記自由走行区間の下流側に位置する場合に、当該渋滞区間の上流端を渋滞の末尾と判定する請求項4に記載の渋滞判定装置。
【請求項6】
前記判定手段は、前記複数の判定区間のうち、前記プローブ車両の平均速度が高速閾値以上となる当該判定区間を前記自由走行区間であると判定する請求項5に記載の渋滞判定装置。
【請求項7】
前記判定手段は、前記低速閾値を、前記判定区間における前記プローブ車両の平均速度に基づいて設定する請求項1〜6のいずれか1項に記載の渋滞判定装置。
【請求項8】
前記判定手段は、前記高速閾値を、前記判定区間における前記プローブ車両の平均速度に基づいて設定する請求項6又は7に記載の渋滞判定装置。
【請求項9】
前記判定手段は、交通信号による停止のためにゼロとなった前記走行速度による影響を軽減するように、前記自由走行区間の判定のための平均速度を算出する請求項6に記載の渋滞判定装置。
【請求項10】
前記判定手段は、瞬間的に前記低速閾値を超えかつ当該低速閾値以下に戻る急激な前記走行速度の変動値を、前記渋滞区間の判定のためのデータから除外する請求項1に記載の渋滞判定装置。
【請求項11】
同じリンクについて前記判定手段が判定した複数の前記渋滞末尾の位置と時刻とに基づいて、前記渋滞の伸縮の伝搬速度を求める情報生成手段を、更に備えている請求項4に記載の渋滞判定装置。
【請求項12】
前記情報生成手段は、前記渋滞の伸縮の伝搬速度に基づいて前記リンクのリンク旅行時間を補正する請求項11に記載の渋滞判定装置。
【請求項13】
プローブ車両が生成したプローブ情報に基づいて道路が渋滞か否かを判定する方法であって、
前記プローブ車両の走行速度、走行位置及び走行時刻を含む前記プローブ情報を取得し、
前記プローブ車両の走行経路に含まれる複数の判定区間のうち、低速閾値以下の前記走行速度である前記プローブ車両の走行が特定の前記判定区間において継続する場合に、当該判定区間を渋滞区間と判定することを特徴とする渋滞判定方法。
【請求項14】
プローブ車両が生成したプローブ情報に基づいて道路が渋滞か否かを判定する判定処理を、コンピュータに実行させるコンピュータプログラムであって、
前記プローブ車両の走行速度、走行位置及び走行時刻を含む前記プローブ情報を取得するステップと、
前記プローブ車両の走行経路に含まれる複数の判定区間のうち、低速閾値以下の前記走行速度である前記プローブ車両の走行が特定の前記判定区間において継続する場合に、当該判定区間を渋滞区間と判定するステップと、を含むことを特徴とするコンピュータプログラム。
【請求項1】
プローブ車両が生成したプローブ情報に基づいて道路が渋滞か否かを判定するための渋滞判定装置であって、
前記プローブ情報に基づいて前記プローブ車両の走行速度、走行位置及び走行時刻を取得する取得手段と、
前記プローブ車両の走行経路に含まれる複数の判定区間のうち、低速閾値以下である前記走行速度での前記プローブ車両の走行が特定の前記判定区間において継続する場合に、当該判定区間を渋滞区間と判定する判定手段と、を備えていることを特徴とする渋滞判定装置。
【請求項2】
前記判定手段は、前記渋滞区間の判定条件として、更に次の(a)又は(b)の条件、若しくは、これらの双方の条件を有する請求項1に記載の渋滞判定装置。
(a) 前記判定区間を走行する前記プローブ車両による、加速閾値以上の加速回数が所定回数以上であること
(b) 前記判定区間を走行する前記プローブ車両による、減速閾値以下の減速回数が所定回数以上であること
【請求項3】
前記判定手段は、前記渋滞区間の判定条件として、更に次の(c)の条件を有する請求項1に記載の渋滞判定装置。
(c) 前記判定区間を走行する前記プローブ車両による、加速閾値以上でかつ減速閾値以下である加減速ペアの回数が所定回数以上であること
【請求項4】
前記判定手段は、前記渋滞区間が、前記渋滞区間と判定されない非渋滞区間の下流側に位置する場合に、当該渋滞区間の上流端を渋滞末尾と判定する請求項1〜3のいずれか1項に記載の渋滞判定装置。
【請求項5】
前記判定手段は、前記複数の判定区間の中から、前記プローブ車両が渋滞でなく自由に走行可能な自由走行区間を判定し、
前記渋滞区間が前記自由走行区間の下流側に位置する場合に、当該渋滞区間の上流端を渋滞の末尾と判定する請求項4に記載の渋滞判定装置。
【請求項6】
前記判定手段は、前記複数の判定区間のうち、前記プローブ車両の平均速度が高速閾値以上となる当該判定区間を前記自由走行区間であると判定する請求項5に記載の渋滞判定装置。
【請求項7】
前記判定手段は、前記低速閾値を、前記判定区間における前記プローブ車両の平均速度に基づいて設定する請求項1〜6のいずれか1項に記載の渋滞判定装置。
【請求項8】
前記判定手段は、前記高速閾値を、前記判定区間における前記プローブ車両の平均速度に基づいて設定する請求項6又は7に記載の渋滞判定装置。
【請求項9】
前記判定手段は、交通信号による停止のためにゼロとなった前記走行速度による影響を軽減するように、前記自由走行区間の判定のための平均速度を算出する請求項6に記載の渋滞判定装置。
【請求項10】
前記判定手段は、瞬間的に前記低速閾値を超えかつ当該低速閾値以下に戻る急激な前記走行速度の変動値を、前記渋滞区間の判定のためのデータから除外する請求項1に記載の渋滞判定装置。
【請求項11】
同じリンクについて前記判定手段が判定した複数の前記渋滞末尾の位置と時刻とに基づいて、前記渋滞の伸縮の伝搬速度を求める情報生成手段を、更に備えている請求項4に記載の渋滞判定装置。
【請求項12】
前記情報生成手段は、前記渋滞の伸縮の伝搬速度に基づいて前記リンクのリンク旅行時間を補正する請求項11に記載の渋滞判定装置。
【請求項13】
プローブ車両が生成したプローブ情報に基づいて道路が渋滞か否かを判定する方法であって、
前記プローブ車両の走行速度、走行位置及び走行時刻を含む前記プローブ情報を取得し、
前記プローブ車両の走行経路に含まれる複数の判定区間のうち、低速閾値以下の前記走行速度である前記プローブ車両の走行が特定の前記判定区間において継続する場合に、当該判定区間を渋滞区間と判定することを特徴とする渋滞判定方法。
【請求項14】
プローブ車両が生成したプローブ情報に基づいて道路が渋滞か否かを判定する判定処理を、コンピュータに実行させるコンピュータプログラムであって、
前記プローブ車両の走行速度、走行位置及び走行時刻を含む前記プローブ情報を取得するステップと、
前記プローブ車両の走行経路に含まれる複数の判定区間のうち、低速閾値以下の前記走行速度である前記プローブ車両の走行が特定の前記判定区間において継続する場合に、当該判定区間を渋滞区間と判定するステップと、を含むことを特徴とするコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−20462(P2010−20462A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2008−179108(P2008−179108)
【出願日】平成20年7月9日(2008.7.9)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.イーサネット
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成20年7月9日(2008.7.9)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.イーサネット
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
[ Back to top ]