
渋滞判定装置及びコンピュータプログラム
【課題】交差点付近を走行する車両による渋滞要因を判定することができる渋滞判定装置及び該渋滞判定装置を実現するためのコンピュータプログラムを提供する。
【解決手段】通信部12は、車両の走行状態に関する車両情報を取得する。車両判定部13は、車両情報に基づいて、交差点に向かって走行する車両が右折車両か直進車両かの別を判定する。渋滞判定部14は、右折車両の停止位置が右折専用車線より上流側にあって、直進車両の右折専用車線より上流側での速度が、右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定する。
【解決手段】通信部12は、車両の走行状態に関する車両情報を取得する。車両判定部13は、車両情報に基づいて、交差点に向かって走行する車両が右折車両か直進車両かの別を判定する。渋滞判定部14は、右折車両の停止位置が右折専用車線より上流側にあって、直進車両の右折専用車線より上流側での速度が、右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、交差点付近に存在する車両による渋滞要因を判定する渋滞判定装置及び該渋滞判定装置を実現するためのコンピュータプログラムに関する。
【背景技術】
【0002】
交差点では、処理容量が低下することで渋滞が発生する。そして、交差点での処理容量の最適化を図るために種々の信号制御方法が行われている。
【0003】
交差点の各流入路に対してどのような時間比率で交通権を与えるかは、通常、交差点への流入交通量に応じて決定される。ここで、交通権のことを現示、時間比率のことをスプリットという。スプリットは、信号灯器の表示サイクル1回分の時間における各現示の青時間の比率に相当する。スプリットは、各信号灯器の灯色切替タイミングの決定に用いられる。通常、スプリットは、負荷率比配分等のアルゴリズムによって決定される。
【0004】
負荷率比配分方式は、流入台数、待ち行列及び飽和交通流率から得られる負荷率を現示毎に求め、負荷率の比に応じてスプリットを配分するアルゴリズムであり、このようなアルゴリズムを用いた信号制御システムが開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−27024号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1のような従来の信号制御システムにあっては、交差点への流入台数を計測するため、通常は、交差点の上流地点に車両感知器を設置しておき、車両感知器で感知した信号に基づいて流入台数を計測している。しかし、交差点の手前で右折専用車線が直進車線と分岐して併設されたような交差点の場合、交差点の上流地点での渋滞の要因が、直進車両ではなく右折車両であるときは、直進用の青信号時間を長くしても、右折車両の処理容量は改善されず、却って無駄な青信号時間が増大し、渋滞に拍車をかけるという問題があった。また、車両感知器で計測した計測結果だけでは、渋滞の要因を判別することができなかった。
【0007】
本発明は、斯かる事情に鑑みてなされたものであり、交差点付近の渋滞要因を判定することができる渋滞判定装置及び該渋滞判定装置を実現するためのコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
第1発明に係る渋滞判定装置は、右折専用車線が設けられた交差点付近に存在する車両による渋滞要因を判定する渋滞判定装置において、車両の位置を含む走行状態に関する車両情報を取得する車両情報取得手段と、該車両情報取得手段で取得した車両情報に基づいて右折車両か直進車両かの別を判定する車両判定手段と、該車両判定手段で判定した右折車両の停止位置が右折専用車線より上流側にあって、前記車両判定手段で判定した直進車両の前記右折専用車線より上流側での速度が、前記右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定する渋滞判定手段とを備えることを特徴とする。
【0009】
第2発明に係る渋滞判定装置は、第1発明において、前記渋滞判定手段で右折渋滞と判定した場合、右折用の青信号時間を延長する信号制御手段を備えることを特徴とする。
【0010】
第3発明に係る渋滞判定装置は、第2発明において、前記車両判定手段で判定した右折車両の位置を特定する特定手段を備え、前記信号制御手段は、前記特定手段で位置を特定した右折車両が交差点を通過するまでの間、右折用の青信号時間を延長するように構成してあることを特徴とする。
【0011】
第4発明に係る渋滞判定装置は、第2発明において、前記車両判定手段で判定した右折車両及び直進車両の台数を計数する計数手段を備え、前記信号制御手段は、前記計数手段で計数した台数に基づいて右折用の青信号時間を延長するように構成してあることを特徴とする。
【0012】
第5発明に係る渋滞判定装置は、第1発明乃至第4発明のいずれか1つにおいて、前記車両判定手段で判定した右折車両の停止位置が、交差点より上流側の所定位置より上流にある場合、前記渋滞判定手段の判定処理を起動する起動手段を備えることを特徴とする。
【0013】
第6発明に係る渋滞判定装置は、第1発明乃至第4発明のいずれか1つにおいて、前記車両判定手段で判定した右折車両の交差点流出領域での速度が速度閾値より速い場合、前記渋滞判定手段の判定処理を起動する起動手段を備えることを特徴とする。
【0014】
第7発明に係る渋滞判定装置は、第1発明乃至第6発明のいずれか1つにおいて、前記渋滞判定手段は、前記車両判定手段で判定した直進車両の前記右折専用車線より上流側での速度と前記右折専用車線に併設された直進車線での速度との差分が第1閾値以上である場合、右折車両による右折渋滞と判定するように構成してあることを特徴とする。
【0015】
第8発明に係る渋滞判定装置は、第1発明乃至第6発明のいずれか1つにおいて、前記渋滞判定手段は、前記車両判定手段で判定した直進車両の前記右折専用車線より上流側での速度が第2閾値以下であり、前記右折専用車線に併設された直進車線での速度が前記第2閾値より大きい第3閾値以上である場合、右折車両による右折渋滞と判定するように構成してあることを特徴とする。
【0016】
第9発明に係るコンピュータプログラムは、コンピュータに、右折専用車線が設けられた交差点付近に存在する車両による渋滞要因を判定するステップを実行させるためのコンピュータプログラムにおいて、コンピュータに、車両の位置を含む走行状態に関する車両情報に基づいて右折車両か直進車両かの別を判定するステップと、該判定するステップで判定した右折車両の停止位置が右折専用車線より上流側にあって、前記判定ステップで判定した直進車両の前記右折専用車線より上流側での速度が、前記右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定するステップとを実行させることを特徴とする。
【0017】
第1発明及び第9発明にあっては、車両の位置を含む走行状態に関する車両情報を取得する。車両情報の取得は、例えば、車車間通信により車両間で送受信されている車両情報を取得することができる。車両情報は、例えば、車両固有の識別子である車両ID、車両の位置及び速度、ウインカースイッチの状態(左又は右ウインカーのオン/オフ)、アクセルの状態(アクセルのオン/オフ)、ブレーキの状態(ブレーキのオン/オフ)などである。取得した車両情報に基づいて右折車両か直進車両かの別を判定する。右折車両か直進車両かの別は、ウインカースイッチの状態により判定してもよく、あるいは予め交差点付近の直進車線及び右折専用車線の位置情報を含む道路情報を記憶しておき、道路情報と車両の位置とにより当該車両が右折専用車線にいるか否かを判定してもよい。また、交差点付近の車両の走行軌跡(所定時間毎又は所定距離毎の複数の車両位置)に基づいて、車両が流入路からどの流出路に走行したかを判定し、直進方向の流出路に走行した車両を直進車両、右折方向の流出路に走行した車両を右折車両と判定することもできる。
【0018】
右折車両の停止位置が右折専用車線より上流側にあって、直進車両の当該右折専用車線より上流側での速度が、当該右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定する。右折専用車線より上流側の位置は、右折専用車線が直進車線から分岐した分岐点より上流側であればよい。分岐点より上流側で渋滞が発生している場合、右折車両による渋滞か直進車両による渋滞が考えられる。そこで、分岐点より上流側での直進車両の速度が、右折専用車線と併設の直進車線での直進車両の速度より遅い場合には、右折専用車線と併設の直進車線での直進車両は渋滞することなく走行していると考えられるので、渋滞は右折車両による右折渋滞であると判定することができる。これにより、交差点付近を走行する車両による渋滞要因が直進車両ではなく右折車両によるものであると判定することができる。
【0019】
第2発明にあっては、右折渋滞と判定した場合、右折用の青信号時間を延長する。渋滞の要因が右折渋滞によるものであると判明した場合に右折用の青信号時間を延長することにより、無駄な青信号時間が発生することなく、渋滞の早期解消を図ることができる。
【0020】
第3発明にあっては、右折車両の位置を特定し、特定した位置に基づいて右折車両が右折車線の停止線を通過するか否かを判定する。そして、右折車両が右折車線の停止線を通過するまでの間、右折用の青信号時間を延長する。なお、位置は、1つの位置でもよく、あるいは複数の位置を用いた走行軌跡でもよい。例えば、右折すると判定された右折車両が複数存在する場合、前後の右折車両が所定の距離内にあって、車群を形成しているときには、最後尾にある右折車両が右折車線の停止線を通過するまで右折用の青信号時間を延長する。前後の右折車両の間に1台又は数台の直進車両が存在するような場合でも、後続の右折車両が右折車線の停止線を通過するように、所定の距離を予め設定しておくことができる。
【0021】
また、右折専用車線の分岐点付近に存在する右折車両が右折車線の停止線を通過するまでの間、右折用の青信号時間を延長してもよい。この場合、車車間通信機能を具備しない車両であって右折予定の車両が右折車両の前(下流側)に存在するときでも、当該右折予定の車両も右折車線の停止線を通過させることができる。また、前後の右折車両の離隔距離が所定の距離閾値より大きい場合には、前の右折車両が右折車線の停止線を通過するまでの間、右折用の青信号時間を延長すればよい。これにより、右折用の青信号時間を無用に長くする事態を防止するとともに、渋滞の早期解消を図ることができる。
【0022】
第4発明にあっては、右折車両及び直進車両の台数を計数し、計数した台数に基づいて右折用の青信号時間を延長する。例えば、渋滞車両に対する右折車両の比率及び直進車両の比率を用いて、信号灯器の表示サイクル1回分の時間における直進用の青信号時間及び右折用の青信号時時間を算出し、右折用の青信号時間が算出した時間になるように延長する。また、右折車両の位置と予め定められた車頭間隔とに基づいて右折車両の台数を求めることもできる。この場合、車車間通信機能を具備しない車両であって右折予定の車両が右折車両の間に存在するときでも、当該右折予定の車両も右折車線の停止線を通過させることができる。これにより、右折用の青信号時間を無用に長くする事態を防止するとともに、渋滞の早期解消を図ることができる。
【0023】
第5発明にあっては、右折車両の停止位置が、交差点より上流側の所定位置より上流にある場合、渋滞判定の処理を起動する。所定位置は、例えば、飽和交通流率、青信号時間(直進用及び右折用を含む)及び平均車頭間隔を積算した値とすることができる。ここで、飽和交通流率は、常時青信号であった場合に、1車線・1時間当たりに最大で流れる交通量であり、一般的に2秒に1台程度である。これにより、信号灯器の1回の青信号時間の間に交差点を流出することができる台数を超えた台数の車両が交差点の上流側にあるときに渋滞が発生していると判定して渋滞要因の判定処理を起動することができるので、渋滞時にだけ渋滞要因の判定処理を行うことができ、処理労力を低減することができる。
【0024】
第6発明にあっては、右折車両の交差点流出領域での速度が速度閾値(例えば、10km/h)より速い場合、渋滞判定の処理を起動する。交差点流出領域は、右折車両が交差点を通過して進入する交差する道路の領域であって、例えば、交差点から所定の距離(例えば、交差点から20m)内の領域とすることができる。右折車両の交差点流出領域での速度が速度閾値より速い場合には、交差点の流出先で渋滞(先詰まり)が発生していないと判定することができるので、渋滞の要因から先詰まりを除外した状態で渋滞要因を判定することができ、精度良く渋滞要因を判定することができる。
【0025】
第7発明にあっては、直進車両の右折専用車線より上流側での速度と右折専用車線に併設された直進車線での速度との差分が第1閾値以上である場合、右折車両による右折渋滞と判定する。分岐点より上流側での直進車両の速度と右折専用車線と併設の直進車線での直進車両の速度との差分が第1閾値以上である場合には、右折専用車線と併設の直進車線での直進車両は渋滞することなく走行していると考えられるので、渋滞は右折車両による右折渋滞であると判定することができる。これにより、交差点付近を走行する車両による渋滞要因が直進車両ではなく右折車両によるものであると判定することができる。
【0026】
第8発明にあっては、直進車両の前記右折専用車線より上流側での速度が第2閾値以下であり、右折専用車線に併設された直進車線での速度が第3閾値以上である場合、右折車両による右折渋滞と判定する。ここで、第2閾値<第3閾値である。分岐点より上流側での直進車両の速度が第2閾値以下であり、右折専用車線と併設の直進車線での直進車両の速度が第3閾値以上である場合には、右折専用車線と併設の直進車線での直進車両は渋滞することなく走行していると考えられるので、渋滞は右折車両による右折渋滞であると判定することができる。これにより、交差点付近を走行する車両による渋滞要因が直進車両ではなく右折車両によるものであると判定することができる。
【発明の効果】
【0027】
本発明によれば、交差点付近の渋滞要因が右折車両によるものであると判定することができる。
【図面の簡単な説明】
【0028】
【図1】本実施の形態に係る渋滞判定装置による交差点の渋滞要因判定の模式図である。
【図2】車車間通信の一例を示す説明図である。
【図3】本実施の形態の渋滞判定装置により渋滞判定を行う交差点の一例を示す模式図である。
【図4】本実施の形態に係る渋滞判定装置の構成の一例を示すブロック図である。
【図5】本実施の形態の渋滞判定装置による右折渋滞判定の一例を示す模式図である。
【図6】本実施の形態の渋滞判定装置による右折渋滞判定の他の例を示す模式図である。
【図7】本実施の形態の渋滞判定装置による右折渋滞判定の他の例を示す模式図である。
【図8】本実施の形態の渋滞判定装置の渋滞判定処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0029】
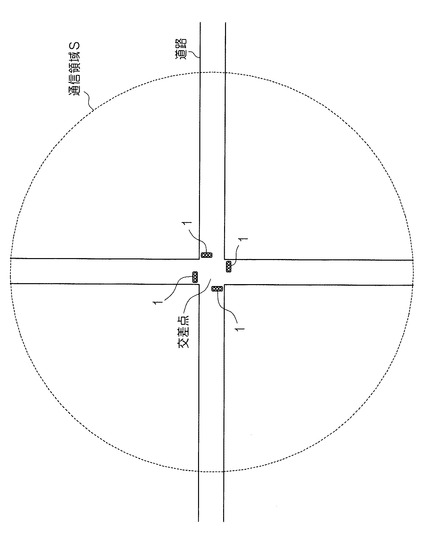
以下、本発明を実施の形態を示す図面に基づいて説明する。図1は本実施の形態に係る渋滞判定装置10による交差点の渋滞要因判定の模式図である。渋滞判定装置10は、交差点を含む所要の範囲の通信領域S内を走行する車両同士が行う車車間通信により送受信される車両情報を取得することにより、交差点の渋滞要因を判定する。渋滞判定装置10は、渋滞要因が交差点での右折車両による右折渋滞であると判定した場合、交差点の右折用の青信号時間を延長することにより、渋滞解消を図る。
【0030】
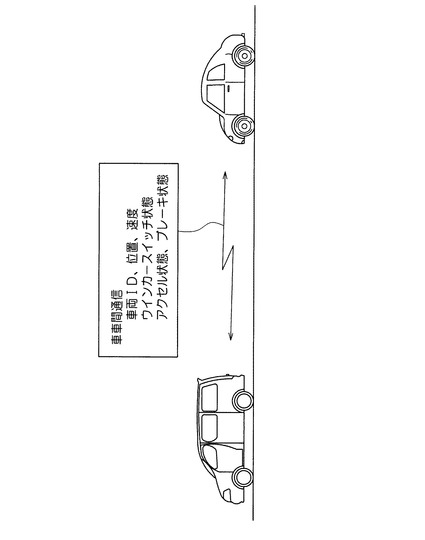
図2は車車間通信の一例を示す説明図である。車車間通信では、車両の前方又は後方を走行する周辺車両との間で車両情報の送受信を行うことができる。車両情報は、車両の走行状態に関する情報であり、例えば、車両固有の識別子である車両ID、車両の位置及び速度、ウインカースイッチの状態(左又は右ウインカーのオン/オフ)、アクセル状態(アクセルのオン/オフ)、ブレーキ状態(ブレーキのオン/オフ)などの情報を含む。
【0031】
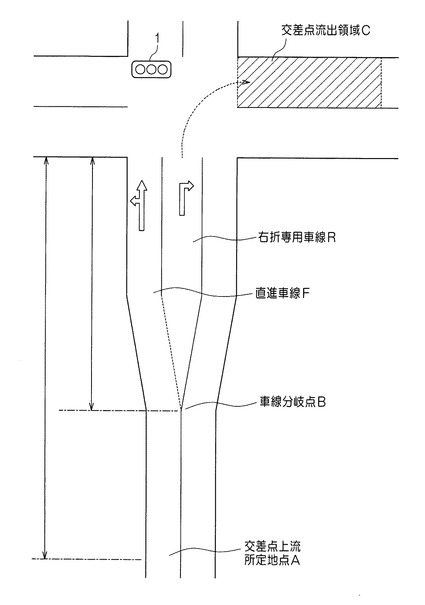
図3は本実施の形態の渋滞判定装置10により渋滞判定を行う交差点の一例を示す模式図である。図3に示すように、交差点の上流側には、右折専用車線Rが直進車線から分岐した車線分岐点Bがある。交差点と車線分岐点Bとの間は、右折専用車線Rに併設された直進車線Fがある。車線分岐点Bよりも上流側には、渋滞が発生しているか否かを判定するための基準としての所定地点Aを設けている。所定地点Aは、例えば、飽和交通流率、青信号時間(直進用及び右折用を含む)及び平均車頭間隔をそれぞれ積算した値とすることができる。ここで、飽和交通流率は、常時青信号であった場合に、1車線・1時間当たりに最大で流れる交通量であり、一般的に2秒に1台程度である。
【0032】
また、直進車線F及び右折専用車線Rに対する信号灯器1を設けてある。信号灯器1は、青直進、青右折などの信号灯色を表示することができる。右折専用車線Rを走行した右折車両が交差点を通過して進入する道路には、交差点流出領域Cを設けてある。交差点流出領域Cは、交差点から所定の距離(例えば、20m程度)の範囲内の領域である。交差点流出領域Cは、交差点を右折した右折車両が交差点の流出先で渋滞(先詰まり)しているか否かを判定するための領域である。なお、図3の例では、簡略化のため右折専用車線Rを、交差する4つの道路のうち1つに設ける構成であるが、かかる構成に限定されるものではなく、交差する各道路に右折専用車線を設けた構成でもよい。
【0033】
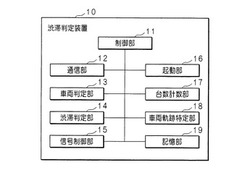
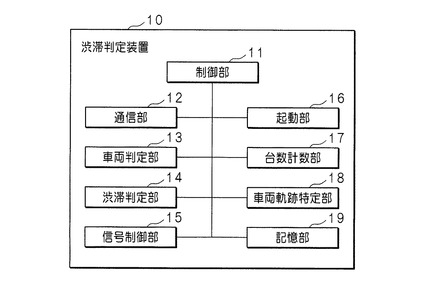
図4は本実施の形態に係る渋滞判定装置10の構成の一例を示すブロック図である。渋滞判定装置10は、装置全体を制御するための制御部11、通信部12、車両の走行状態を判定する車両判定部13、渋滞要因を判定する渋滞判定部14、信号灯器1の灯色表示時間を調整するための信号制御部15、渋滞判定部14の処理を起動する起動部16、台数計数部17、車両軌跡特定部18、交差点付近の直進車線F及び右折専用車線R等の位置情報を含む道路情報を記憶する記憶部19などを備える。
【0034】
交通信号制御機が渋滞判定装置10であってもよい。すなわち、本実施の形態の渋滞判定装置10は、交通信号制御機そのものである。あるいは、交通信号制御機に対して指令を与える上位装置である中央の信号制御装置が渋滞判定装置10であってもよい。すなわち、本実施の形態の渋滞判定装置10は、中央の信号制御装置であってもよい。
【0035】
通信部12は、車両の走行状態に関する車両情報を取得する車両情報取得手段としての機能を有する。通信部12は、例えば、中域通信としてUHF帯における無線通信機能を備える。なお、UHF帯に限定されるものではなく、VHF帯における通信機能、無線LANなどの通信機能を備えるものでもよい。通信部12は、図1に例示した通信領域S内に存在する車両同士の車車間通信で送受信される車両情報を取得(受信)する。通信部12が取得する車両情報は、例えば、車両固有の識別子である車両ID、車両の位置及び速度、ウインカースイッチの状態(左又は右ウインカーのオン/オフ)、アクセル状態(アクセルのオン/オフ)、ブレーキ状態(ブレーキのオン/オフ)などの情報である。
【0036】
車両判定部13は、通信部12で取得した車両情報に基づいて、交差点に向かう車両が右折車両か直進車両かの別を判定する車両判定手段としての機能を有する。右折車両であるか否かの判定は、例えば、右ウインカーがオンである車両を右折車両と判定することができる。また、右折車両であるか否かの判定は、交差点付近の道路地図を参照して、車両の位置が右折専用車線Rにあるか否かによっても判定することができる。また、車両判定部13は、交差点付近の車両の走行軌跡(所定時間毎又は所定距離毎の複数の車両位置)に基づいて、車両が流入路からどの流出路に走行したかを判定し、直進方向の流出路に走行した車両を直進車両、右折方向の流出路に走行した車両を右折車両と判定することもできる。
【0037】
また、直進車両であるか否かの判定は、例えば、右ウインカーがオフである車両を直進車両と判定することができる。なお、左ウインカーがオンである車両は、厳密にいえば直進車両ではなく左折車両であるが、右折車両か直進車両かの別を判断する上では、直進車両として扱ってもよい。また、直進車両であるか否かの判定は、交差点付近の道路地図を参照して、車両の位置が右折専用車線Rに併設の直進車線Fにあるか否かによっても判定することができる。
【0038】
渋滞判定部14は、右折車両の停止位置が右折専用車線Rより上流側にあって、直進車両の右折専用車線Rより上流側での速度が、右折専用車線Rに併設された直進車線Fでの速度よりも遅い場合、右折車両による右折渋滞と判定する渋滞判定手段としての機能を有する。
【0039】
起動部16は、渋滞判定部14による渋滞判定処理を起動する起動手段としての機能を有する。以下、交差点における渋滞が右折車両による右折渋滞の判定方法、及び渋滞判定処理の起動条件について説明する。
【0040】
図5は本実施の形態の渋滞判定装置10による右折渋滞判定の一例を示す模式図である。図5は右折車両による渋滞が発生している状況を模式的に表現したものであり、図中模様を付した車両は右折車両であり、模様のない車両は直進車両を表す。
【0041】
右折渋滞であるか否かの判定は、2つの条件により判定することができる。第1の条件は、右折車両の停止位置が右折専用車線Rより上流側にあること、すなわち、停止状態の右折車両が右折専用車線Rからあふれ出し、車線分岐点Bより上流側に存在することである。第2の条件は、直進車両の右折専用車線Rより上流側での速度が、右折専用車線Rに併設された直進車線Fでの速度よりも遅いということである。
【0042】
第1の条件に関し、右折車両の停止位置が右折専用車線Rより上流側にあるか否かの判定は、例えば、右ウインカーがオンである車両の位置が、車線分岐点Bよりも上流側(交差点から離れる方向)にあって、当該車両の速度がゼロであるかどうかで判定することができる。なお、車線分岐点Bよりどの程度上流側であればよいかは、適宜設定することができるが、一例としては、車線分岐点Bと所定地点Aとの間の任意の地点でもよく、あるいは所定地点Aよりさらに上流側の地点としてもよい。図5の例では、所定地点A付近に右折車両201が存在している。
【0043】
第2の条件に関し、右折車両が右折専用車線Rからあふれ出している状態では、車線分岐点Bより上流側に存在する直進車両(例えば、図5の直進車両202)は、右折車両の存在により渋滞に巻き込まれ、停止か比較的遅い速度で走行することになる。一方、車線分岐点Bと交差点との間、すなわち、右折専用車線Rに併設された直進車線Fでは、右折車両により走行が妨げられることがないので、直進車両(例えば、図5の直進車両203)は比較的速い速度で走行することができる。すなわち、前述の2つの条件を充足する場合、交差点での渋滞は、右折車両による右折渋滞であると判定することができる。
【0044】
上述のように、車線分岐点Bより上流側で渋滞が発生している場合、右折車両による渋滞か直進車両による渋滞が考えられる。そこで、車線分岐点Bより上流側での直進車両の速度が、右折専用車線Rと併設の直進車線Fでの直進車両の速度より遅い場合には、右折専用車線Rと併設の直進車線Fでの直進車両は渋滞することなく走行していると考えられるので、渋滞は右折車両による右折渋滞であると判定することができる。これにより、交差点付近を走行する車両による渋滞要因が直進車両ではなく右折車両によるものであると判定することができる。なお、車線分岐点Bより上流側での直進車両と、右折専用車線Rと併設の直進車線Fでの直進車両とは、異なる車両でもよく、あるいは同一の車両であってもよい。
【0045】
上述の例では、第2の条件として、直進車両の右折専用車線Rより上流側での速度が、右折専用車線Rに併設された直進車線Fでの速度よりも遅いとしたが、この第2の条件には、次の条件も含む。例えば、第2の条件として、直進車両の右折専用車線Rより上流側での速度と、右折専用車線Rに併設された直進車線Fでの速度との速度差が第1閾値としての速度閾値Vth1(例えば、20km/h)以上とすることができる。また、別の第2の条件として、直進車両の右折専用車線Rより上流側での速度が第2閾値としての速度閾値Vth2(例えば、10km/h)以下(遅く)であり、かる右折専用車線Rに併設された直進車線Fでの速度が第3閾値としての速度閾値Vth3(例えば、30km/h)以上(速い)とすることもできる。ここで、第2閾値<第3閾値である。
【0046】
図6は本実施の形態の渋滞判定装置10による右折渋滞判定の他の例を示す模式図である。図6の例は、交差点の渋滞が右折車両による右折渋滞ではない場合を示す。図6の例では、右折車両201の停止位置が、交差点より上流側の所定位置Aより上流にあるので、起動部16は、渋滞判定部14による渋滞判定処理を起動する。
【0047】
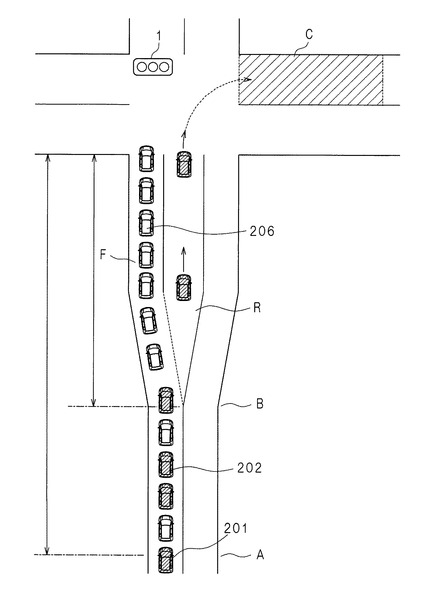
図6の例では、右折車両201の停止位置が右折専用車線Rより上流側にあるので、第1の条件を充足する。しかし、図6の例に示すように、直進車両が交差点まで渋滞している場合(すなわち、渋滞の要因が右折車両ではなく直進車両である場合)、右折専用車線Rに併設された直進車線Fでの直進車両206は、右折専用車線Rより上流側に存在する直進車両202と同様に停止、あるいは比較的遅い速度で走行しているので、右折専用車線Rより上流側に存在する直進車両202の速度が、右折専用車線Rに併設された直進車線Fでの直進車両206の速度よりも遅いという第2の条件は充足しない。従って、図6の例に示すような状態では、渋滞判定部14は、右折渋滞ではないと判定する。
【0048】
次に、渋滞判定処理の起動条件について説明する。起動部16は、車両判定部13で判定した右折車両の停止位置が、交差点より上流側の所定位置Aより上流にある場合、渋滞判定の処理を起動する。図5の例では、停止中の右折車両201が所定地点Aより上流側に存在しているので、渋滞判定部14による渋滞判定処理が行われる。これにより、信号灯器の1回の青信号時間の間に交差点を流出することができる台数を超えた台数の車両が交差点の上流側に停止しているときに渋滞が発生していると判定し渋滞要因の判定処理を起動することができるので、渋滞時にだけ渋滞要因の判定処理を行うことができ、処理労力を低減することができる。
【0049】
また、別の起動条件を設けることもできる。すなわち、起動部16は、右折車両の交差点流出領域Cでの速度が速度閾値(例えば、10km/h)より速い場合、渋滞判定処理を起動する。すなわち、右折車両が交差点を右折して交差点流出領域Cで渋滞している場合には、渋滞判定部14による渋滞判定処理を行わないようにする。図5の例では、交差点で右折した右折車両204の交差点流出領域Cでの速度が速度閾値より速い速度で走行している状態を表している。右折車両の交差点流出領域Cでの速度が速度閾値より速い場合には、交差点の流出先で渋滞(先詰まり)が発生していないと判定することができるので、渋滞の要因から先詰まりを除外した状態で渋滞要因を判定することができ、精度良く渋滞要因を判定することができる。
【0050】
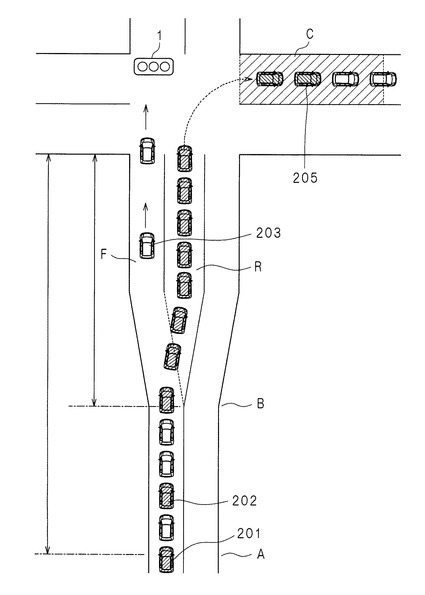
図7は本実施の形態の渋滞判定装置10による右折渋滞判定の他の例を示す模式図である。図7の例は、交差点で右折した車両が、交差点流出領域Cで渋滞している場合を示す。図7の例では、仮に渋滞判定部14で渋滞判定を行った場合には、図5の場合と同様に、第1の条件及び第2の条件を充足するので、右折渋滞であると判定することになる。このような場合、信号灯器1の右折用の青信号時間を延長しても、右折先の道路で渋滞しているため、交差点での右折渋滞を解消することができない。そこで、図7の例で示すような状態、すなわち、右折車両が交差点を右折して交差点流出領域Cで渋滞している場合には、渋滞判定部14による渋滞判定処理を行わないようにする。
【0051】
信号制御部15は、渋滞判定部14で右折渋滞と判定した場合、右折用の青信号時間を延長する信号制御手段としての機能を有する。右折渋滞が渋滞の要因であると判明した場合に右折用の青信号時間を延長することにより、無駄な青信号時間が発生することなく、渋滞の早期解消を図ることができる。
【0052】
台数計数部17は、渋滞判定部14で判定した右折車両及び直進車両の台数を計数する計数手段としての機能を有する。そして、信号制御部15は、台数計数部17で計数した台数に基づいて右折用の青信号時間を延長する。
【0053】
例えば、渋滞車両に対する右折車両の比率及び直進車両の比率を用いて、信号灯器の表示サイクル1回分の時間における直進用の青信号時間及び右折用の青信号時時間を算出し、右折用の青信号時間が算出した時間になるように延長する。また、右折車両の位置と予め定められた車頭間隔とに基づいて右折車両の台数を求めることもできる。この場合、車車間通信機能を具備しない車両であって右折予定の車両が右折車両の間に存在するときでも、当該右折予定の車両も交差点を通過させることができる。これにより、右折用の青信号時間を無用に長くする事態を防止するとともに、渋滞の早期解消を図ることができる。なお、右折車両の位置から求めた車両台数を用いて青時間延長をする代わりに、車両感知器で計測した渋滞長を車頭間隔で除算して求めた車両台数を用いて青信号時間延長をしてもよい。
【0054】
車両軌跡特定部18は、渋滞判定部14で判定した右折車両の位置を特定する特定手段としての機能を有する。なお、位置は、1つの位置でもよく、あるいは複数の位置を用いた走行軌跡でもよい。車両軌跡特定部18は、右折車両の位置を特定し、特定した位置に基づいて右折車両が右折車線の停止線を通過するか否かを判定する。そして、信号制御部15は、右折車両が交差点(例えば、右折車線の停止線とすることができる)を通過するまでの間、右折用の青信号時間を延長する。
【0055】
例えば、右折すると判定された右折車両が複数存在する場合、前後の右折車両が所定の距離内にあって、車群を形成しているときには、最後尾にある右折車両が右折車線の停止線を通過するまで右折用の青信号時間を延長する。所定の距離は、前後の右折車両の間に1台又は数台の直進車両が存在するような場合でも、後続の右折車両が右折車線の停止線を通過するようにするために予め設定しておくことができる。また、右折専用車線の分岐点付近に存在する右折車両が右折車線の停止線を通過するまでの間、右折用の青信号時間を延長してもよい。この場合、車車間通信機能を具備しない車両であって右折予定の車両が右折車両の前(下流側)に存在するときでも、当該右折予定の車両も右折車線の停止線を通過させることができる。また、前後の右折車両の離隔距離が所定の距離閾値より大きい場合には、前の右折車両が右折車線の停止線を通過するまでの間、右折用の青信号時間を延長すればよい。これにより、右折用の青信号時間を無用に長くする事態を防止するとともに、渋滞の早期解消を図ることができる。
【0056】
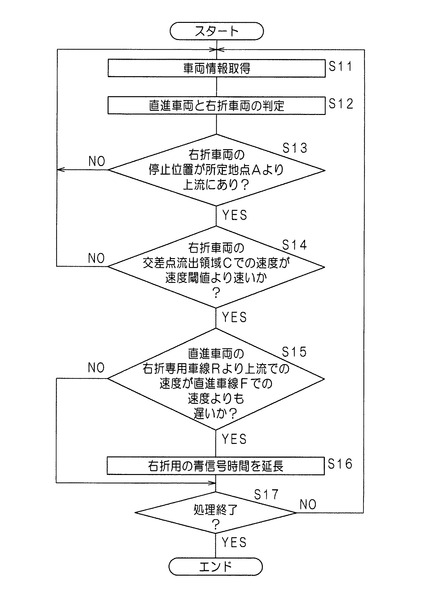
次に、本実施の形態の渋滞判定装置10の動作について説明する。図8は本実施の形態の渋滞判定装置10の渋滞判定処理の手順を示すフローチャートである。制御部11が渋滞判定装置10内の各部を制御するので、以下では、制御部11が処理を行うものとして説明する。
【0057】
制御部11は、通信領域S内の車両から走行状態に関する車両情報を取得し(S11)、取得した車両情報に基づいて、直進車両と右折車両との別を判定する(S12)。制御部11は、右折車両の停止位置が所定地点Aより上流にあるか否かを判定し(S13)、停止位置が所定地点Aより上流にない場合(S13でNO)、交差点での渋滞が青信号時間を調整する必要があるほどではなく、渋滞要因の判定を行う必要がないとして、ステップS11以降の処理を続ける。
【0058】
右折車両の停止位置が所定地点Aより上流にある場合(S13でYES)、制御部11は、右折車両の交差点流出領域Cでの速度が速度閾値より速いか否かを判定する(S14)。右折車両の交差点流出領域Cでの速度が速度閾値より速くない場合(S14でNO)、制御部11は、右折先の道路で渋滞が発生しているとして、渋滞要因の判定を行うことなくステップS11以降の処理を続ける。
【0059】
右折車両の交差点流出領域Cでの速度が速度閾値より速い場合(S14でYES)、制御部11は、直進車両の右折専用車線Rより上流での速度が、直進車線Fでの速度よりも遅いか否かを判定する(S15)。
【0060】
直進車両の右折専用車線Rより上流での速度が、直進車線Fでの速度よりも遅い場合(S15でYES)、制御部11は、渋滞の要因が右折車両による右折渋滞であるとして、右折用の青信号時間を延長する(S16)。直進車両の右折専用車線Rより上流での速度が、直進車線Fでの速度よりも遅くない場合(S15でNO)、制御部11は、ステップS16の処理を行わずに後述のステップS17の処理を行う。
【0061】
制御部11は、処理を終了するか否かを判定し(S17)、処理を終了しない場合(S17でNO)、ステップS11以降の処理を繰り返し、処理を終了すると判定した場合(S17でYES)、処理を終了する。
【0062】
上述の処理手順では、ステップS13及びステップS14における判定がいずれもYESの場合に、渋滞判定処理を行うが、これに限定されるものではなく、ステップS14の処理を省略することもできる。
【0063】
渋滞判定装置10は、CPU、RAMなどを備えた汎用コンピュータを用いて実現することもできる。すなわち、図8に示すような処理手順を定めたプログラムコードをコンピュータに備えられたRAMにロードし、プログラムコードをCPUで実行することにより、コンピュータ上で渋滞判定装置を実現することができる。
【0064】
上述の実施の形態で、交差点流出領域Cで渋滞が発生している場合、渋滞判定装置10が、交差点流出領域Cの下流側の交差点における渋滞要因を判定した結果を用いて、下流側の交差点の青信号時間を延長して、交差点流出領域Cでの渋滞を解消させるようにすることもできる。
【0065】
上述の実施の形態において、渋滞判定の処理は、交差点の信号灯器の灯色の表示時間、切替タイミングなどの信号情報を取得しておき、信号灯器の灯色の切替タイミングに同期させて行うこともできる。例えば、交差点の信号灯器の灯色が青信号(右折用の青信号も含む)である時間帯において、上述の第1の条件及び第2の条件を充足するか否かを判定してもよい。これにより、青信号の時間帯における渋滞を解消することができる。また、複数のサイクルを含む所定の時間の間、繰り返し渋滞判定を行って、右折渋滞が繰り返し継続する場合に、右折用の青信号時間を延長するようにしてもよい。これにより、過渡的な右折渋滞を除外して青信号時間が頻繁に変化する事態を抑制しつつ、慢性的な右折渋滞を解消させることができる。
【0066】
上述の実施の形態では、渋滞判定装置10は、交通信号制御機又は中央の信号制御装置であったが、これに限定されるものではない。例えば、渋滞判定装置10を交通信号制御機又は信号制御装置と別の装置とし、渋滞判定装置10が交通信号制御機又は信号制御装置に青信号時間の延長の指示を出力し、交通信号制御機又は信号制御装置がこの指示に従って青信号時間を延長してもよい。
【0067】
開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0068】
11 制御部
12 通信部(車両情報取得手段)
13 車両判定部(車両判定手段)
14 渋滞判定部(渋滞判定手段)
15 信号制御部(信号制御手段)
16 起動部(起動手段)
17 台数計数部(計数手段)
18 車両軌跡特定部(特定手段)
19 記憶部
【技術分野】
【0001】
本発明は、交差点付近に存在する車両による渋滞要因を判定する渋滞判定装置及び該渋滞判定装置を実現するためのコンピュータプログラムに関する。
【背景技術】
【0002】
交差点では、処理容量が低下することで渋滞が発生する。そして、交差点での処理容量の最適化を図るために種々の信号制御方法が行われている。
【0003】
交差点の各流入路に対してどのような時間比率で交通権を与えるかは、通常、交差点への流入交通量に応じて決定される。ここで、交通権のことを現示、時間比率のことをスプリットという。スプリットは、信号灯器の表示サイクル1回分の時間における各現示の青時間の比率に相当する。スプリットは、各信号灯器の灯色切替タイミングの決定に用いられる。通常、スプリットは、負荷率比配分等のアルゴリズムによって決定される。
【0004】
負荷率比配分方式は、流入台数、待ち行列及び飽和交通流率から得られる負荷率を現示毎に求め、負荷率の比に応じてスプリットを配分するアルゴリズムであり、このようなアルゴリズムを用いた信号制御システムが開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−27024号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1のような従来の信号制御システムにあっては、交差点への流入台数を計測するため、通常は、交差点の上流地点に車両感知器を設置しておき、車両感知器で感知した信号に基づいて流入台数を計測している。しかし、交差点の手前で右折専用車線が直進車線と分岐して併設されたような交差点の場合、交差点の上流地点での渋滞の要因が、直進車両ではなく右折車両であるときは、直進用の青信号時間を長くしても、右折車両の処理容量は改善されず、却って無駄な青信号時間が増大し、渋滞に拍車をかけるという問題があった。また、車両感知器で計測した計測結果だけでは、渋滞の要因を判別することができなかった。
【0007】
本発明は、斯かる事情に鑑みてなされたものであり、交差点付近の渋滞要因を判定することができる渋滞判定装置及び該渋滞判定装置を実現するためのコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
第1発明に係る渋滞判定装置は、右折専用車線が設けられた交差点付近に存在する車両による渋滞要因を判定する渋滞判定装置において、車両の位置を含む走行状態に関する車両情報を取得する車両情報取得手段と、該車両情報取得手段で取得した車両情報に基づいて右折車両か直進車両かの別を判定する車両判定手段と、該車両判定手段で判定した右折車両の停止位置が右折専用車線より上流側にあって、前記車両判定手段で判定した直進車両の前記右折専用車線より上流側での速度が、前記右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定する渋滞判定手段とを備えることを特徴とする。
【0009】
第2発明に係る渋滞判定装置は、第1発明において、前記渋滞判定手段で右折渋滞と判定した場合、右折用の青信号時間を延長する信号制御手段を備えることを特徴とする。
【0010】
第3発明に係る渋滞判定装置は、第2発明において、前記車両判定手段で判定した右折車両の位置を特定する特定手段を備え、前記信号制御手段は、前記特定手段で位置を特定した右折車両が交差点を通過するまでの間、右折用の青信号時間を延長するように構成してあることを特徴とする。
【0011】
第4発明に係る渋滞判定装置は、第2発明において、前記車両判定手段で判定した右折車両及び直進車両の台数を計数する計数手段を備え、前記信号制御手段は、前記計数手段で計数した台数に基づいて右折用の青信号時間を延長するように構成してあることを特徴とする。
【0012】
第5発明に係る渋滞判定装置は、第1発明乃至第4発明のいずれか1つにおいて、前記車両判定手段で判定した右折車両の停止位置が、交差点より上流側の所定位置より上流にある場合、前記渋滞判定手段の判定処理を起動する起動手段を備えることを特徴とする。
【0013】
第6発明に係る渋滞判定装置は、第1発明乃至第4発明のいずれか1つにおいて、前記車両判定手段で判定した右折車両の交差点流出領域での速度が速度閾値より速い場合、前記渋滞判定手段の判定処理を起動する起動手段を備えることを特徴とする。
【0014】
第7発明に係る渋滞判定装置は、第1発明乃至第6発明のいずれか1つにおいて、前記渋滞判定手段は、前記車両判定手段で判定した直進車両の前記右折専用車線より上流側での速度と前記右折専用車線に併設された直進車線での速度との差分が第1閾値以上である場合、右折車両による右折渋滞と判定するように構成してあることを特徴とする。
【0015】
第8発明に係る渋滞判定装置は、第1発明乃至第6発明のいずれか1つにおいて、前記渋滞判定手段は、前記車両判定手段で判定した直進車両の前記右折専用車線より上流側での速度が第2閾値以下であり、前記右折専用車線に併設された直進車線での速度が前記第2閾値より大きい第3閾値以上である場合、右折車両による右折渋滞と判定するように構成してあることを特徴とする。
【0016】
第9発明に係るコンピュータプログラムは、コンピュータに、右折専用車線が設けられた交差点付近に存在する車両による渋滞要因を判定するステップを実行させるためのコンピュータプログラムにおいて、コンピュータに、車両の位置を含む走行状態に関する車両情報に基づいて右折車両か直進車両かの別を判定するステップと、該判定するステップで判定した右折車両の停止位置が右折専用車線より上流側にあって、前記判定ステップで判定した直進車両の前記右折専用車線より上流側での速度が、前記右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定するステップとを実行させることを特徴とする。
【0017】
第1発明及び第9発明にあっては、車両の位置を含む走行状態に関する車両情報を取得する。車両情報の取得は、例えば、車車間通信により車両間で送受信されている車両情報を取得することができる。車両情報は、例えば、車両固有の識別子である車両ID、車両の位置及び速度、ウインカースイッチの状態(左又は右ウインカーのオン/オフ)、アクセルの状態(アクセルのオン/オフ)、ブレーキの状態(ブレーキのオン/オフ)などである。取得した車両情報に基づいて右折車両か直進車両かの別を判定する。右折車両か直進車両かの別は、ウインカースイッチの状態により判定してもよく、あるいは予め交差点付近の直進車線及び右折専用車線の位置情報を含む道路情報を記憶しておき、道路情報と車両の位置とにより当該車両が右折専用車線にいるか否かを判定してもよい。また、交差点付近の車両の走行軌跡(所定時間毎又は所定距離毎の複数の車両位置)に基づいて、車両が流入路からどの流出路に走行したかを判定し、直進方向の流出路に走行した車両を直進車両、右折方向の流出路に走行した車両を右折車両と判定することもできる。
【0018】
右折車両の停止位置が右折専用車線より上流側にあって、直進車両の当該右折専用車線より上流側での速度が、当該右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定する。右折専用車線より上流側の位置は、右折専用車線が直進車線から分岐した分岐点より上流側であればよい。分岐点より上流側で渋滞が発生している場合、右折車両による渋滞か直進車両による渋滞が考えられる。そこで、分岐点より上流側での直進車両の速度が、右折専用車線と併設の直進車線での直進車両の速度より遅い場合には、右折専用車線と併設の直進車線での直進車両は渋滞することなく走行していると考えられるので、渋滞は右折車両による右折渋滞であると判定することができる。これにより、交差点付近を走行する車両による渋滞要因が直進車両ではなく右折車両によるものであると判定することができる。
【0019】
第2発明にあっては、右折渋滞と判定した場合、右折用の青信号時間を延長する。渋滞の要因が右折渋滞によるものであると判明した場合に右折用の青信号時間を延長することにより、無駄な青信号時間が発生することなく、渋滞の早期解消を図ることができる。
【0020】
第3発明にあっては、右折車両の位置を特定し、特定した位置に基づいて右折車両が右折車線の停止線を通過するか否かを判定する。そして、右折車両が右折車線の停止線を通過するまでの間、右折用の青信号時間を延長する。なお、位置は、1つの位置でもよく、あるいは複数の位置を用いた走行軌跡でもよい。例えば、右折すると判定された右折車両が複数存在する場合、前後の右折車両が所定の距離内にあって、車群を形成しているときには、最後尾にある右折車両が右折車線の停止線を通過するまで右折用の青信号時間を延長する。前後の右折車両の間に1台又は数台の直進車両が存在するような場合でも、後続の右折車両が右折車線の停止線を通過するように、所定の距離を予め設定しておくことができる。
【0021】
また、右折専用車線の分岐点付近に存在する右折車両が右折車線の停止線を通過するまでの間、右折用の青信号時間を延長してもよい。この場合、車車間通信機能を具備しない車両であって右折予定の車両が右折車両の前(下流側)に存在するときでも、当該右折予定の車両も右折車線の停止線を通過させることができる。また、前後の右折車両の離隔距離が所定の距離閾値より大きい場合には、前の右折車両が右折車線の停止線を通過するまでの間、右折用の青信号時間を延長すればよい。これにより、右折用の青信号時間を無用に長くする事態を防止するとともに、渋滞の早期解消を図ることができる。
【0022】
第4発明にあっては、右折車両及び直進車両の台数を計数し、計数した台数に基づいて右折用の青信号時間を延長する。例えば、渋滞車両に対する右折車両の比率及び直進車両の比率を用いて、信号灯器の表示サイクル1回分の時間における直進用の青信号時間及び右折用の青信号時時間を算出し、右折用の青信号時間が算出した時間になるように延長する。また、右折車両の位置と予め定められた車頭間隔とに基づいて右折車両の台数を求めることもできる。この場合、車車間通信機能を具備しない車両であって右折予定の車両が右折車両の間に存在するときでも、当該右折予定の車両も右折車線の停止線を通過させることができる。これにより、右折用の青信号時間を無用に長くする事態を防止するとともに、渋滞の早期解消を図ることができる。
【0023】
第5発明にあっては、右折車両の停止位置が、交差点より上流側の所定位置より上流にある場合、渋滞判定の処理を起動する。所定位置は、例えば、飽和交通流率、青信号時間(直進用及び右折用を含む)及び平均車頭間隔を積算した値とすることができる。ここで、飽和交通流率は、常時青信号であった場合に、1車線・1時間当たりに最大で流れる交通量であり、一般的に2秒に1台程度である。これにより、信号灯器の1回の青信号時間の間に交差点を流出することができる台数を超えた台数の車両が交差点の上流側にあるときに渋滞が発生していると判定して渋滞要因の判定処理を起動することができるので、渋滞時にだけ渋滞要因の判定処理を行うことができ、処理労力を低減することができる。
【0024】
第6発明にあっては、右折車両の交差点流出領域での速度が速度閾値(例えば、10km/h)より速い場合、渋滞判定の処理を起動する。交差点流出領域は、右折車両が交差点を通過して進入する交差する道路の領域であって、例えば、交差点から所定の距離(例えば、交差点から20m)内の領域とすることができる。右折車両の交差点流出領域での速度が速度閾値より速い場合には、交差点の流出先で渋滞(先詰まり)が発生していないと判定することができるので、渋滞の要因から先詰まりを除外した状態で渋滞要因を判定することができ、精度良く渋滞要因を判定することができる。
【0025】
第7発明にあっては、直進車両の右折専用車線より上流側での速度と右折専用車線に併設された直進車線での速度との差分が第1閾値以上である場合、右折車両による右折渋滞と判定する。分岐点より上流側での直進車両の速度と右折専用車線と併設の直進車線での直進車両の速度との差分が第1閾値以上である場合には、右折専用車線と併設の直進車線での直進車両は渋滞することなく走行していると考えられるので、渋滞は右折車両による右折渋滞であると判定することができる。これにより、交差点付近を走行する車両による渋滞要因が直進車両ではなく右折車両によるものであると判定することができる。
【0026】
第8発明にあっては、直進車両の前記右折専用車線より上流側での速度が第2閾値以下であり、右折専用車線に併設された直進車線での速度が第3閾値以上である場合、右折車両による右折渋滞と判定する。ここで、第2閾値<第3閾値である。分岐点より上流側での直進車両の速度が第2閾値以下であり、右折専用車線と併設の直進車線での直進車両の速度が第3閾値以上である場合には、右折専用車線と併設の直進車線での直進車両は渋滞することなく走行していると考えられるので、渋滞は右折車両による右折渋滞であると判定することができる。これにより、交差点付近を走行する車両による渋滞要因が直進車両ではなく右折車両によるものであると判定することができる。
【発明の効果】
【0027】
本発明によれば、交差点付近の渋滞要因が右折車両によるものであると判定することができる。
【図面の簡単な説明】
【0028】
【図1】本実施の形態に係る渋滞判定装置による交差点の渋滞要因判定の模式図である。
【図2】車車間通信の一例を示す説明図である。
【図3】本実施の形態の渋滞判定装置により渋滞判定を行う交差点の一例を示す模式図である。
【図4】本実施の形態に係る渋滞判定装置の構成の一例を示すブロック図である。
【図5】本実施の形態の渋滞判定装置による右折渋滞判定の一例を示す模式図である。
【図6】本実施の形態の渋滞判定装置による右折渋滞判定の他の例を示す模式図である。
【図7】本実施の形態の渋滞判定装置による右折渋滞判定の他の例を示す模式図である。
【図8】本実施の形態の渋滞判定装置の渋滞判定処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0029】
以下、本発明を実施の形態を示す図面に基づいて説明する。図1は本実施の形態に係る渋滞判定装置10による交差点の渋滞要因判定の模式図である。渋滞判定装置10は、交差点を含む所要の範囲の通信領域S内を走行する車両同士が行う車車間通信により送受信される車両情報を取得することにより、交差点の渋滞要因を判定する。渋滞判定装置10は、渋滞要因が交差点での右折車両による右折渋滞であると判定した場合、交差点の右折用の青信号時間を延長することにより、渋滞解消を図る。
【0030】
図2は車車間通信の一例を示す説明図である。車車間通信では、車両の前方又は後方を走行する周辺車両との間で車両情報の送受信を行うことができる。車両情報は、車両の走行状態に関する情報であり、例えば、車両固有の識別子である車両ID、車両の位置及び速度、ウインカースイッチの状態(左又は右ウインカーのオン/オフ)、アクセル状態(アクセルのオン/オフ)、ブレーキ状態(ブレーキのオン/オフ)などの情報を含む。
【0031】
図3は本実施の形態の渋滞判定装置10により渋滞判定を行う交差点の一例を示す模式図である。図3に示すように、交差点の上流側には、右折専用車線Rが直進車線から分岐した車線分岐点Bがある。交差点と車線分岐点Bとの間は、右折専用車線Rに併設された直進車線Fがある。車線分岐点Bよりも上流側には、渋滞が発生しているか否かを判定するための基準としての所定地点Aを設けている。所定地点Aは、例えば、飽和交通流率、青信号時間(直進用及び右折用を含む)及び平均車頭間隔をそれぞれ積算した値とすることができる。ここで、飽和交通流率は、常時青信号であった場合に、1車線・1時間当たりに最大で流れる交通量であり、一般的に2秒に1台程度である。
【0032】
また、直進車線F及び右折専用車線Rに対する信号灯器1を設けてある。信号灯器1は、青直進、青右折などの信号灯色を表示することができる。右折専用車線Rを走行した右折車両が交差点を通過して進入する道路には、交差点流出領域Cを設けてある。交差点流出領域Cは、交差点から所定の距離(例えば、20m程度)の範囲内の領域である。交差点流出領域Cは、交差点を右折した右折車両が交差点の流出先で渋滞(先詰まり)しているか否かを判定するための領域である。なお、図3の例では、簡略化のため右折専用車線Rを、交差する4つの道路のうち1つに設ける構成であるが、かかる構成に限定されるものではなく、交差する各道路に右折専用車線を設けた構成でもよい。
【0033】
図4は本実施の形態に係る渋滞判定装置10の構成の一例を示すブロック図である。渋滞判定装置10は、装置全体を制御するための制御部11、通信部12、車両の走行状態を判定する車両判定部13、渋滞要因を判定する渋滞判定部14、信号灯器1の灯色表示時間を調整するための信号制御部15、渋滞判定部14の処理を起動する起動部16、台数計数部17、車両軌跡特定部18、交差点付近の直進車線F及び右折専用車線R等の位置情報を含む道路情報を記憶する記憶部19などを備える。
【0034】
交通信号制御機が渋滞判定装置10であってもよい。すなわち、本実施の形態の渋滞判定装置10は、交通信号制御機そのものである。あるいは、交通信号制御機に対して指令を与える上位装置である中央の信号制御装置が渋滞判定装置10であってもよい。すなわち、本実施の形態の渋滞判定装置10は、中央の信号制御装置であってもよい。
【0035】
通信部12は、車両の走行状態に関する車両情報を取得する車両情報取得手段としての機能を有する。通信部12は、例えば、中域通信としてUHF帯における無線通信機能を備える。なお、UHF帯に限定されるものではなく、VHF帯における通信機能、無線LANなどの通信機能を備えるものでもよい。通信部12は、図1に例示した通信領域S内に存在する車両同士の車車間通信で送受信される車両情報を取得(受信)する。通信部12が取得する車両情報は、例えば、車両固有の識別子である車両ID、車両の位置及び速度、ウインカースイッチの状態(左又は右ウインカーのオン/オフ)、アクセル状態(アクセルのオン/オフ)、ブレーキ状態(ブレーキのオン/オフ)などの情報である。
【0036】
車両判定部13は、通信部12で取得した車両情報に基づいて、交差点に向かう車両が右折車両か直進車両かの別を判定する車両判定手段としての機能を有する。右折車両であるか否かの判定は、例えば、右ウインカーがオンである車両を右折車両と判定することができる。また、右折車両であるか否かの判定は、交差点付近の道路地図を参照して、車両の位置が右折専用車線Rにあるか否かによっても判定することができる。また、車両判定部13は、交差点付近の車両の走行軌跡(所定時間毎又は所定距離毎の複数の車両位置)に基づいて、車両が流入路からどの流出路に走行したかを判定し、直進方向の流出路に走行した車両を直進車両、右折方向の流出路に走行した車両を右折車両と判定することもできる。
【0037】
また、直進車両であるか否かの判定は、例えば、右ウインカーがオフである車両を直進車両と判定することができる。なお、左ウインカーがオンである車両は、厳密にいえば直進車両ではなく左折車両であるが、右折車両か直進車両かの別を判断する上では、直進車両として扱ってもよい。また、直進車両であるか否かの判定は、交差点付近の道路地図を参照して、車両の位置が右折専用車線Rに併設の直進車線Fにあるか否かによっても判定することができる。
【0038】
渋滞判定部14は、右折車両の停止位置が右折専用車線Rより上流側にあって、直進車両の右折専用車線Rより上流側での速度が、右折専用車線Rに併設された直進車線Fでの速度よりも遅い場合、右折車両による右折渋滞と判定する渋滞判定手段としての機能を有する。
【0039】
起動部16は、渋滞判定部14による渋滞判定処理を起動する起動手段としての機能を有する。以下、交差点における渋滞が右折車両による右折渋滞の判定方法、及び渋滞判定処理の起動条件について説明する。
【0040】
図5は本実施の形態の渋滞判定装置10による右折渋滞判定の一例を示す模式図である。図5は右折車両による渋滞が発生している状況を模式的に表現したものであり、図中模様を付した車両は右折車両であり、模様のない車両は直進車両を表す。
【0041】
右折渋滞であるか否かの判定は、2つの条件により判定することができる。第1の条件は、右折車両の停止位置が右折専用車線Rより上流側にあること、すなわち、停止状態の右折車両が右折専用車線Rからあふれ出し、車線分岐点Bより上流側に存在することである。第2の条件は、直進車両の右折専用車線Rより上流側での速度が、右折専用車線Rに併設された直進車線Fでの速度よりも遅いということである。
【0042】
第1の条件に関し、右折車両の停止位置が右折専用車線Rより上流側にあるか否かの判定は、例えば、右ウインカーがオンである車両の位置が、車線分岐点Bよりも上流側(交差点から離れる方向)にあって、当該車両の速度がゼロであるかどうかで判定することができる。なお、車線分岐点Bよりどの程度上流側であればよいかは、適宜設定することができるが、一例としては、車線分岐点Bと所定地点Aとの間の任意の地点でもよく、あるいは所定地点Aよりさらに上流側の地点としてもよい。図5の例では、所定地点A付近に右折車両201が存在している。
【0043】
第2の条件に関し、右折車両が右折専用車線Rからあふれ出している状態では、車線分岐点Bより上流側に存在する直進車両(例えば、図5の直進車両202)は、右折車両の存在により渋滞に巻き込まれ、停止か比較的遅い速度で走行することになる。一方、車線分岐点Bと交差点との間、すなわち、右折専用車線Rに併設された直進車線Fでは、右折車両により走行が妨げられることがないので、直進車両(例えば、図5の直進車両203)は比較的速い速度で走行することができる。すなわち、前述の2つの条件を充足する場合、交差点での渋滞は、右折車両による右折渋滞であると判定することができる。
【0044】
上述のように、車線分岐点Bより上流側で渋滞が発生している場合、右折車両による渋滞か直進車両による渋滞が考えられる。そこで、車線分岐点Bより上流側での直進車両の速度が、右折専用車線Rと併設の直進車線Fでの直進車両の速度より遅い場合には、右折専用車線Rと併設の直進車線Fでの直進車両は渋滞することなく走行していると考えられるので、渋滞は右折車両による右折渋滞であると判定することができる。これにより、交差点付近を走行する車両による渋滞要因が直進車両ではなく右折車両によるものであると判定することができる。なお、車線分岐点Bより上流側での直進車両と、右折専用車線Rと併設の直進車線Fでの直進車両とは、異なる車両でもよく、あるいは同一の車両であってもよい。
【0045】
上述の例では、第2の条件として、直進車両の右折専用車線Rより上流側での速度が、右折専用車線Rに併設された直進車線Fでの速度よりも遅いとしたが、この第2の条件には、次の条件も含む。例えば、第2の条件として、直進車両の右折専用車線Rより上流側での速度と、右折専用車線Rに併設された直進車線Fでの速度との速度差が第1閾値としての速度閾値Vth1(例えば、20km/h)以上とすることができる。また、別の第2の条件として、直進車両の右折専用車線Rより上流側での速度が第2閾値としての速度閾値Vth2(例えば、10km/h)以下(遅く)であり、かる右折専用車線Rに併設された直進車線Fでの速度が第3閾値としての速度閾値Vth3(例えば、30km/h)以上(速い)とすることもできる。ここで、第2閾値<第3閾値である。
【0046】
図6は本実施の形態の渋滞判定装置10による右折渋滞判定の他の例を示す模式図である。図6の例は、交差点の渋滞が右折車両による右折渋滞ではない場合を示す。図6の例では、右折車両201の停止位置が、交差点より上流側の所定位置Aより上流にあるので、起動部16は、渋滞判定部14による渋滞判定処理を起動する。
【0047】
図6の例では、右折車両201の停止位置が右折専用車線Rより上流側にあるので、第1の条件を充足する。しかし、図6の例に示すように、直進車両が交差点まで渋滞している場合(すなわち、渋滞の要因が右折車両ではなく直進車両である場合)、右折専用車線Rに併設された直進車線Fでの直進車両206は、右折専用車線Rより上流側に存在する直進車両202と同様に停止、あるいは比較的遅い速度で走行しているので、右折専用車線Rより上流側に存在する直進車両202の速度が、右折専用車線Rに併設された直進車線Fでの直進車両206の速度よりも遅いという第2の条件は充足しない。従って、図6の例に示すような状態では、渋滞判定部14は、右折渋滞ではないと判定する。
【0048】
次に、渋滞判定処理の起動条件について説明する。起動部16は、車両判定部13で判定した右折車両の停止位置が、交差点より上流側の所定位置Aより上流にある場合、渋滞判定の処理を起動する。図5の例では、停止中の右折車両201が所定地点Aより上流側に存在しているので、渋滞判定部14による渋滞判定処理が行われる。これにより、信号灯器の1回の青信号時間の間に交差点を流出することができる台数を超えた台数の車両が交差点の上流側に停止しているときに渋滞が発生していると判定し渋滞要因の判定処理を起動することができるので、渋滞時にだけ渋滞要因の判定処理を行うことができ、処理労力を低減することができる。
【0049】
また、別の起動条件を設けることもできる。すなわち、起動部16は、右折車両の交差点流出領域Cでの速度が速度閾値(例えば、10km/h)より速い場合、渋滞判定処理を起動する。すなわち、右折車両が交差点を右折して交差点流出領域Cで渋滞している場合には、渋滞判定部14による渋滞判定処理を行わないようにする。図5の例では、交差点で右折した右折車両204の交差点流出領域Cでの速度が速度閾値より速い速度で走行している状態を表している。右折車両の交差点流出領域Cでの速度が速度閾値より速い場合には、交差点の流出先で渋滞(先詰まり)が発生していないと判定することができるので、渋滞の要因から先詰まりを除外した状態で渋滞要因を判定することができ、精度良く渋滞要因を判定することができる。
【0050】
図7は本実施の形態の渋滞判定装置10による右折渋滞判定の他の例を示す模式図である。図7の例は、交差点で右折した車両が、交差点流出領域Cで渋滞している場合を示す。図7の例では、仮に渋滞判定部14で渋滞判定を行った場合には、図5の場合と同様に、第1の条件及び第2の条件を充足するので、右折渋滞であると判定することになる。このような場合、信号灯器1の右折用の青信号時間を延長しても、右折先の道路で渋滞しているため、交差点での右折渋滞を解消することができない。そこで、図7の例で示すような状態、すなわち、右折車両が交差点を右折して交差点流出領域Cで渋滞している場合には、渋滞判定部14による渋滞判定処理を行わないようにする。
【0051】
信号制御部15は、渋滞判定部14で右折渋滞と判定した場合、右折用の青信号時間を延長する信号制御手段としての機能を有する。右折渋滞が渋滞の要因であると判明した場合に右折用の青信号時間を延長することにより、無駄な青信号時間が発生することなく、渋滞の早期解消を図ることができる。
【0052】
台数計数部17は、渋滞判定部14で判定した右折車両及び直進車両の台数を計数する計数手段としての機能を有する。そして、信号制御部15は、台数計数部17で計数した台数に基づいて右折用の青信号時間を延長する。
【0053】
例えば、渋滞車両に対する右折車両の比率及び直進車両の比率を用いて、信号灯器の表示サイクル1回分の時間における直進用の青信号時間及び右折用の青信号時時間を算出し、右折用の青信号時間が算出した時間になるように延長する。また、右折車両の位置と予め定められた車頭間隔とに基づいて右折車両の台数を求めることもできる。この場合、車車間通信機能を具備しない車両であって右折予定の車両が右折車両の間に存在するときでも、当該右折予定の車両も交差点を通過させることができる。これにより、右折用の青信号時間を無用に長くする事態を防止するとともに、渋滞の早期解消を図ることができる。なお、右折車両の位置から求めた車両台数を用いて青時間延長をする代わりに、車両感知器で計測した渋滞長を車頭間隔で除算して求めた車両台数を用いて青信号時間延長をしてもよい。
【0054】
車両軌跡特定部18は、渋滞判定部14で判定した右折車両の位置を特定する特定手段としての機能を有する。なお、位置は、1つの位置でもよく、あるいは複数の位置を用いた走行軌跡でもよい。車両軌跡特定部18は、右折車両の位置を特定し、特定した位置に基づいて右折車両が右折車線の停止線を通過するか否かを判定する。そして、信号制御部15は、右折車両が交差点(例えば、右折車線の停止線とすることができる)を通過するまでの間、右折用の青信号時間を延長する。
【0055】
例えば、右折すると判定された右折車両が複数存在する場合、前後の右折車両が所定の距離内にあって、車群を形成しているときには、最後尾にある右折車両が右折車線の停止線を通過するまで右折用の青信号時間を延長する。所定の距離は、前後の右折車両の間に1台又は数台の直進車両が存在するような場合でも、後続の右折車両が右折車線の停止線を通過するようにするために予め設定しておくことができる。また、右折専用車線の分岐点付近に存在する右折車両が右折車線の停止線を通過するまでの間、右折用の青信号時間を延長してもよい。この場合、車車間通信機能を具備しない車両であって右折予定の車両が右折車両の前(下流側)に存在するときでも、当該右折予定の車両も右折車線の停止線を通過させることができる。また、前後の右折車両の離隔距離が所定の距離閾値より大きい場合には、前の右折車両が右折車線の停止線を通過するまでの間、右折用の青信号時間を延長すればよい。これにより、右折用の青信号時間を無用に長くする事態を防止するとともに、渋滞の早期解消を図ることができる。
【0056】
次に、本実施の形態の渋滞判定装置10の動作について説明する。図8は本実施の形態の渋滞判定装置10の渋滞判定処理の手順を示すフローチャートである。制御部11が渋滞判定装置10内の各部を制御するので、以下では、制御部11が処理を行うものとして説明する。
【0057】
制御部11は、通信領域S内の車両から走行状態に関する車両情報を取得し(S11)、取得した車両情報に基づいて、直進車両と右折車両との別を判定する(S12)。制御部11は、右折車両の停止位置が所定地点Aより上流にあるか否かを判定し(S13)、停止位置が所定地点Aより上流にない場合(S13でNO)、交差点での渋滞が青信号時間を調整する必要があるほどではなく、渋滞要因の判定を行う必要がないとして、ステップS11以降の処理を続ける。
【0058】
右折車両の停止位置が所定地点Aより上流にある場合(S13でYES)、制御部11は、右折車両の交差点流出領域Cでの速度が速度閾値より速いか否かを判定する(S14)。右折車両の交差点流出領域Cでの速度が速度閾値より速くない場合(S14でNO)、制御部11は、右折先の道路で渋滞が発生しているとして、渋滞要因の判定を行うことなくステップS11以降の処理を続ける。
【0059】
右折車両の交差点流出領域Cでの速度が速度閾値より速い場合(S14でYES)、制御部11は、直進車両の右折専用車線Rより上流での速度が、直進車線Fでの速度よりも遅いか否かを判定する(S15)。
【0060】
直進車両の右折専用車線Rより上流での速度が、直進車線Fでの速度よりも遅い場合(S15でYES)、制御部11は、渋滞の要因が右折車両による右折渋滞であるとして、右折用の青信号時間を延長する(S16)。直進車両の右折専用車線Rより上流での速度が、直進車線Fでの速度よりも遅くない場合(S15でNO)、制御部11は、ステップS16の処理を行わずに後述のステップS17の処理を行う。
【0061】
制御部11は、処理を終了するか否かを判定し(S17)、処理を終了しない場合(S17でNO)、ステップS11以降の処理を繰り返し、処理を終了すると判定した場合(S17でYES)、処理を終了する。
【0062】
上述の処理手順では、ステップS13及びステップS14における判定がいずれもYESの場合に、渋滞判定処理を行うが、これに限定されるものではなく、ステップS14の処理を省略することもできる。
【0063】
渋滞判定装置10は、CPU、RAMなどを備えた汎用コンピュータを用いて実現することもできる。すなわち、図8に示すような処理手順を定めたプログラムコードをコンピュータに備えられたRAMにロードし、プログラムコードをCPUで実行することにより、コンピュータ上で渋滞判定装置を実現することができる。
【0064】
上述の実施の形態で、交差点流出領域Cで渋滞が発生している場合、渋滞判定装置10が、交差点流出領域Cの下流側の交差点における渋滞要因を判定した結果を用いて、下流側の交差点の青信号時間を延長して、交差点流出領域Cでの渋滞を解消させるようにすることもできる。
【0065】
上述の実施の形態において、渋滞判定の処理は、交差点の信号灯器の灯色の表示時間、切替タイミングなどの信号情報を取得しておき、信号灯器の灯色の切替タイミングに同期させて行うこともできる。例えば、交差点の信号灯器の灯色が青信号(右折用の青信号も含む)である時間帯において、上述の第1の条件及び第2の条件を充足するか否かを判定してもよい。これにより、青信号の時間帯における渋滞を解消することができる。また、複数のサイクルを含む所定の時間の間、繰り返し渋滞判定を行って、右折渋滞が繰り返し継続する場合に、右折用の青信号時間を延長するようにしてもよい。これにより、過渡的な右折渋滞を除外して青信号時間が頻繁に変化する事態を抑制しつつ、慢性的な右折渋滞を解消させることができる。
【0066】
上述の実施の形態では、渋滞判定装置10は、交通信号制御機又は中央の信号制御装置であったが、これに限定されるものではない。例えば、渋滞判定装置10を交通信号制御機又は信号制御装置と別の装置とし、渋滞判定装置10が交通信号制御機又は信号制御装置に青信号時間の延長の指示を出力し、交通信号制御機又は信号制御装置がこの指示に従って青信号時間を延長してもよい。
【0067】
開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0068】
11 制御部
12 通信部(車両情報取得手段)
13 車両判定部(車両判定手段)
14 渋滞判定部(渋滞判定手段)
15 信号制御部(信号制御手段)
16 起動部(起動手段)
17 台数計数部(計数手段)
18 車両軌跡特定部(特定手段)
19 記憶部
【特許請求の範囲】
【請求項1】
右折専用車線が設けられた交差点付近に存在する車両による渋滞要因を判定する渋滞判定装置において、
車両の位置を含む走行状態に関する車両情報を取得する車両情報取得手段と、
該車両情報取得手段で取得した車両情報に基づいて右折車両か直進車両かの別を判定する車両判定手段と、
該車両判定手段で判定した右折車両の停止位置が右折専用車線より上流側にあって、前記車両判定手段で判定した直進車両の前記右折専用車線より上流側での速度が、前記右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定する渋滞判定手段と
を備えることを特徴とする渋滞判定装置。
【請求項2】
前記渋滞判定手段で右折渋滞と判定した場合、右折用の青信号時間を延長する信号制御手段を備えることを特徴とする請求項1に記載の渋滞判定装置。
【請求項3】
前記車両判定手段で判定した右折車両の位置を特定する特定手段を備え、
前記信号制御手段は、
前記特定手段で位置を特定した右折車両が交差点を通過するまでの間、右折用の青信号時間を延長するように構成してあることを特徴とする請求項2に記載の渋滞判定装置。
【請求項4】
前記車両判定手段で判定した右折車両及び直進車両の台数を計数する計数手段を備え、
前記信号制御手段は、
前記計数手段で計数した台数に基づいて右折用の青信号時間を延長するように構成してあることを特徴とする請求項2に記載の渋滞判定装置。
【請求項5】
前記車両判定手段で判定した右折車両の停止位置が、交差点より上流側の所定位置より上流にある場合、前記渋滞判定手段の判定処理を起動する起動手段を備えることを特徴とする請求項1乃至請求項4のいずれか1項に記載の渋滞判定装置。
【請求項6】
前記車両判定手段で判定した右折車両の交差点流出領域での速度が速度閾値より速い場合、前記渋滞判定手段の判定処理を起動する起動手段を備えることを特徴とする請求項1乃至請求項4のいずれか1項に記載の渋滞判定装置。
【請求項7】
前記渋滞判定手段は、
前記車両判定手段で判定した直進車両の前記右折専用車線より上流側での速度と前記右折専用車線に併設された直進車線での速度との差分が第1閾値以上である場合、右折車両による右折渋滞と判定するように構成してあることを特徴とする請求項1乃至請求項6のいずれか1項に記載の渋滞判定装置。
【請求項8】
前記渋滞判定手段は、
前記車両判定手段で判定した直進車両の前記右折専用車線より上流側での速度が第2閾値以下であり、前記右折専用車線に併設された直進車線での速度が前記第2閾値より大きい第3閾値以上である場合、右折車両による右折渋滞と判定するように構成してあることを特徴とする請求項1乃至請求項6のいずれか1項に記載の渋滞判定装置。
【請求項9】
コンピュータに、右折専用車線が設けられた交差点付近に存在する車両による渋滞要因を判定するステップを実行させるためのコンピュータプログラムにおいて、
コンピュータに、
車両の位置を含む走行状態に関する車両情報に基づいて右折車両か直進車両かの別を判定するステップと、
該判定するステップで判定した右折車両の停止位置が右折専用車線より上流側にあって、前記判定ステップで判定した直進車両の前記右折専用車線より上流側での速度が、前記右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定するステップと
を実行させることを特徴とするコンピュータプログラム。
【請求項1】
右折専用車線が設けられた交差点付近に存在する車両による渋滞要因を判定する渋滞判定装置において、
車両の位置を含む走行状態に関する車両情報を取得する車両情報取得手段と、
該車両情報取得手段で取得した車両情報に基づいて右折車両か直進車両かの別を判定する車両判定手段と、
該車両判定手段で判定した右折車両の停止位置が右折専用車線より上流側にあって、前記車両判定手段で判定した直進車両の前記右折専用車線より上流側での速度が、前記右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定する渋滞判定手段と
を備えることを特徴とする渋滞判定装置。
【請求項2】
前記渋滞判定手段で右折渋滞と判定した場合、右折用の青信号時間を延長する信号制御手段を備えることを特徴とする請求項1に記載の渋滞判定装置。
【請求項3】
前記車両判定手段で判定した右折車両の位置を特定する特定手段を備え、
前記信号制御手段は、
前記特定手段で位置を特定した右折車両が交差点を通過するまでの間、右折用の青信号時間を延長するように構成してあることを特徴とする請求項2に記載の渋滞判定装置。
【請求項4】
前記車両判定手段で判定した右折車両及び直進車両の台数を計数する計数手段を備え、
前記信号制御手段は、
前記計数手段で計数した台数に基づいて右折用の青信号時間を延長するように構成してあることを特徴とする請求項2に記載の渋滞判定装置。
【請求項5】
前記車両判定手段で判定した右折車両の停止位置が、交差点より上流側の所定位置より上流にある場合、前記渋滞判定手段の判定処理を起動する起動手段を備えることを特徴とする請求項1乃至請求項4のいずれか1項に記載の渋滞判定装置。
【請求項6】
前記車両判定手段で判定した右折車両の交差点流出領域での速度が速度閾値より速い場合、前記渋滞判定手段の判定処理を起動する起動手段を備えることを特徴とする請求項1乃至請求項4のいずれか1項に記載の渋滞判定装置。
【請求項7】
前記渋滞判定手段は、
前記車両判定手段で判定した直進車両の前記右折専用車線より上流側での速度と前記右折専用車線に併設された直進車線での速度との差分が第1閾値以上である場合、右折車両による右折渋滞と判定するように構成してあることを特徴とする請求項1乃至請求項6のいずれか1項に記載の渋滞判定装置。
【請求項8】
前記渋滞判定手段は、
前記車両判定手段で判定した直進車両の前記右折専用車線より上流側での速度が第2閾値以下であり、前記右折専用車線に併設された直進車線での速度が前記第2閾値より大きい第3閾値以上である場合、右折車両による右折渋滞と判定するように構成してあることを特徴とする請求項1乃至請求項6のいずれか1項に記載の渋滞判定装置。
【請求項9】
コンピュータに、右折専用車線が設けられた交差点付近に存在する車両による渋滞要因を判定するステップを実行させるためのコンピュータプログラムにおいて、
コンピュータに、
車両の位置を含む走行状態に関する車両情報に基づいて右折車両か直進車両かの別を判定するステップと、
該判定するステップで判定した右折車両の停止位置が右折専用車線より上流側にあって、前記判定ステップで判定した直進車両の前記右折専用車線より上流側での速度が、前記右折専用車線に併設された直進車線での速度よりも遅い場合、右折車両による右折渋滞と判定するステップと
を実行させることを特徴とするコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−192051(P2011−192051A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2010−58014(P2010−58014)
【出願日】平成22年3月15日(2010.3.15)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願日】平成22年3月15日(2010.3.15)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]