
渋滞検知装置及びプログラム
【課題】 片側複数車線の道路における渋滞の発生有無を検知することが可能な1つのドップラー方式の検出センサを用いた渋滞検知装置の提供。
【解決手段】 片側複数車線を走行中の1乃至複数の車両に対し放射した送信波と、車両からの反射波との差分波を周波数分析した結果に基づいて、車両の速度を算出するための周波数スペクトルを、振幅値が大きい順に抽出した複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを基準に特定する。すなわち、特定した振幅値が小さい周波数スペクトルの周波数を基準として他の周波数スペクトルの周波数との比較を行い、この比較により得られた周波数が小さい方の周波数スペクトルから速度を算出する。算出した速度を所定値と比較して渋滞発生の有無を判定する。これにより、片側複数車線の道路における渋滞の発生有無を検知することが、1つのドップラー方式の検出センサを用いるだけでできるようになる。
【解決手段】 片側複数車線を走行中の1乃至複数の車両に対し放射した送信波と、車両からの反射波との差分波を周波数分析した結果に基づいて、車両の速度を算出するための周波数スペクトルを、振幅値が大きい順に抽出した複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを基準に特定する。すなわち、特定した振幅値が小さい周波数スペクトルの周波数を基準として他の周波数スペクトルの周波数との比較を行い、この比較により得られた周波数が小さい方の周波数スペクトルから速度を算出する。算出した速度を所定値と比較して渋滞発生の有無を判定する。これにより、片側複数車線の道路における渋滞の発生有無を検知することが、1つのドップラー方式の検出センサを用いるだけでできるようになる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路上で発生する渋滞を検知する渋滞検知装置及びプログラムに関し、特に1つのドップラー方式の検出センサを用いて片側複数車線の道路における渋滞の発生有無を検知する技術に関する。
【背景技術】
【0002】
従来から、道路上を走行する通行車両に向けて超音波やマイクロ波等のビーム(電波)を発射し、道路上を走行中の車両からの反射波を受信することに応じて、該道路上における渋滞の発生有無を検知する、所謂ドップラー方式の検出センサを用いた渋滞検知装置(単にドップラー方式の渋滞検知装置とも呼ぶ)が知られている。ドップラー方式の検出センサを用いた装置の一例を挙げると、下記に示す特許文献1又は特許文献2に記載の装置などがある。
【0003】
従来知られたドップラー方式の渋滞検知装置においては、発射したビーム(電波)と受信した反射波との差分波を周波数分析することによって得られる周波数スペクトル分布に従い、車両の速度と相関関係がある複数の周波数スペクトルの中から最も振幅値(ピーク値)が大きい周波数スペクトルを1つ特定し、該特定した周波数スペクトルの周波数(つまりはドップラー周波数)に基づく速度が所定値以下(例えば、高速道路では毎時40キロメートル(km/h)以下など)であれば、該道路上において渋滞が発生したと検知する。すなわち、道路上を一番速く走行している車両の速度を特定し、該速度が所定速度を下回っているか否かによって渋滞の発生有無を検知するようになっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−288674号公報
【特許文献2】特開2008−51613号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したように、従来知られたドップラー方式の渋滞検知装置においては、受信した反射波に基づく周波数スペクトル分布のうち最もピーク値が大きい周波数スペクトルを特定し、該特定した周波数スペクトルに基づく車速(つまりは、道路上を一番速く走行している車両の速度)が所定速度を下回っていれば全ての車両が当然に所定速度を下回るので渋滞が発生していると看做す発想しかない。そのため、追い越し車線及び走行車線からなる片側2車線あるいは追い越し車線及び第1,第2走行車線からなる片側3車線などといった片側複数車線の道路において、例えば1車線のみ(又は3車線のうちの2車線)が渋滞しているような場合(具体例をあげると高速道路のインター出口渋滞、渋滞発生開始時、渋滞解消時などであって、このような状態は特に高速道路などにおいて往々にして発生するが、これを便宜的に特有な渋滞と呼ぶ)、従来では1つのドップラー方式の検出センサを用いただけではこうした特有な渋滞を検知することができなかった。これは、複数車線のうち渋滞中の車線以外では車両が順調に流れて走行していることから、渋滞中の車線以外を走行中の車両の速度は所定速度を下回ることがないことに起因する。
【0006】
そこで、この点を解決するために、片側複数車線の各車線(レーン)毎にドップラー式の検知センサを配置しておき、各車線個別に該車線上を走行中の車両の速度を検知することによって、片側複数車線における前記特有な渋滞を含む全ての渋滞の発生有無を検知させるようにしていた(これは、いうなれば複数のドップラー方式の検出センサを用いた渋滞検知装置である)。
【0007】
しかし、上述したようにドップラー式の検知センサを片側複数車線の各車線毎に配置する場合、道路に架橋するなどの大掛かりな工事が必要であり設置が容易でないこと、また複数車線のうち特定の1車線のみに関して走行中の車両の速度を確実に検出させるためにビームの指向方向などをそれぞれ勘案して複数のドップラー式の検知センサをそれぞれ正確に取り付けしなければならず面倒であること、さらに渋滞が発生しやすい場所が道路事情等によって変わったとしても、架橋するなどして一度設置されてしまうと容易に移動させることができずに役に立たなくなってしまう恐れがあることなどの問題がある。
【0008】
以上のように、従来のドップラー式の検知センサを利用した装置は片側複数車線の道路における渋滞を検知するのには設置の観点から全く向いておらず、ましてや1つのドップラー式の検知センサを用いただけでは片側複数車線の道路における渋滞、特には上記したような片側複数車線の道路で発生しうる特有な渋滞の発生有無を検知することは不可能であった。
【0009】
また、上述したドップラー方式の渋滞検知装置とは別に、1台の検知センサのみを用いて片側複数車線の道路における渋滞を検知する装置がある。その一例として、複数車線に渡る大型のループコイルを道路に埋め込んでおき、このループコイル上を車が通過することによる磁界の乱れから車両の通過時刻を測定することに応じて、数メートルという狭い範囲で当該車両の速度を求め、この車両の速度が所定速度よりも速いか否かによって渋滞を検知するループコイル方式の検知センサを用いた渋滞検知装置が従来知られている。しかし、こうしたループコイル方式の渋滞検知装置はループコイルそのものが大変高価であるし、またループコイルを路面下に埋設するといった大掛かりな工事が必要とされることから、上述したドップラー方式の渋滞検知装置と同様に使い勝手が悪いと言える。
【0010】
本発明は上述の点に鑑みてなされたもので、1つのドップラー方式の検出センサを用いて片側複数車線の道路における渋滞の発生有無を検知することが可能な、小型かつ安価な渋滞検知装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明に係る渋滞検知装置は、片側複数車線を走行中の1乃至複数の車両に対し送信波を放射すると共に前記車両からの反射波を受信するセンサ手段と、前記送信波と前記反射波との差分波を周波数分析する周波数分析手段と、前記周波数分析手段による周波数分析結果に基づいて振幅値が大きい順に1乃至複数の周波数スペクトルを抽出し、該抽出した1乃至複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを特定する特定手段と、前記特定した振幅値が小さい周波数スペクトルの周波数と前記抽出した他の周波数スペクトルの周波数とを比較して、周波数が小さい方の周波数スペクトルから速度を算出する算出手段と、前記算出した速度を所定値と比較して渋滞発生の有無を判定する判定手段とを具える。
【0012】
本発明によれば、片側複数車線を走行中の1乃至複数の車両に対し放射した送信波と、前記車両からの反射波との差分波を周波数分析することによって得られる周波数分析結果に基づいて、渋滞発生の有無を判定する際の車両の速度を算出するために用いる周波数スペクトルを、振幅値が大きい順に抽出した複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを基準に特定するようにした。すなわち、振幅値が小さい周波数スペクトルを特定し、該特定した振幅値が小さい周波数スペクトルの周波数を基準として抽出した他の周波数スペクトルの周波数との比較を行い、この比較により得られた周波数が小さい方の周波数スペクトルから速度を算出する。そして、算出した速度を所定値と比較して渋滞発生の有無を判定する。これにより、例えば高速道路等でよく見られる特有な渋滞を含む片側複数車線の道路で発生しうる渋滞の発生有無を検知することが、1つのドップラー方式の検出センサを用いるだけでできるようになる。また、こうした装置は小型かつ安価であって持ち運びやすいことから、道路脇への設置が簡易であるし、設置箇所を移動することも容易となる。
【0013】
本発明は装置の発明として構成し実施することができるのみならず、方法の発明として構成し実施することができる。また、本発明は、コンピュータまたはDSP等のプロセッサのプログラムの形態で実施することができるし、そのようなプログラムを記憶した記憶媒体の形態で実施することもできる。
【発明の効果】
【0014】
本発明によれば、振幅値が大きい順に抽出した複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを基準に他の周波数スペクトルとの比較を行うことによって、片側複数車線の道路で発生しうる渋滞の発生有無の検知を行うのに用いる車両の速度を算出するようにしたことから、1つのドップラー方式の検出センサを用いるだけで片側複数車線の道路で発生しうる特有な渋滞を含む全ての渋滞についてその発生有無を検知することができるようになる、という効果を奏する。
【図面の簡単な説明】
【0015】
【図1】本発明に係る渋滞検知装置の一実施例を示す概念図である。
【図2】本発明に係る渋滞検知装置の片側複数車線の道路における設置態様の一例を示す概念図である。
【図3】渋滞判定処理の一実施例を示すフローチャートである。
【図4】片側2車線の道路において検出される周波数分布の一例を示す概念図である。
【発明を実施するための形態】
【0016】
以下、この発明の実施の形態を添付図面に従って詳細に説明する。
【0017】
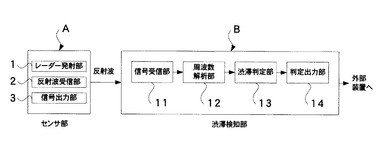
図1は、本発明に係る渋滞検知装置の一実施例を示す概念図である。本発明に係る渋滞検知装置は、センサ部Aと渋滞検知部Bとを含んでなる。センサ部Aは、後述する図2に示すように片側複数車線の道路脇に設置されており、複数車線を走行中の車両の速度をドップラー方式にて計測検知するためにビーム(電波)を複数車線全体にわたって放射状に発射すると共に、該ビームの放射に応じて該複数車線上を走行中の車両からの反射波を受信し、該受信した反射波を出力信号として出力できるようになっている。すなわち、センサ部Aは複数車線全体にわたって予め決められた所定の送信周波数(例えば24.15GHz)のビーム(電波:送信波)を放射するレーダー発射部1と、複数車線上を走行中の車両からの反射波を受信する反射波受信部2と、さらに渋滞検知部Bに対して前記受信した反射波を出力する信号出力部3とを具える。
【0018】
他方、渋滞検知装置Bは、信号受信部11と、周波数解析部12と、渋滞判定部13と、判定出力部14とを具える。信号受信部11は、センサ部Aから出力される反射波を取得する。周波数解析部12は、前記取得した反射波と前記センサ部Aから放射されるビーム(電波:送信波)との比較により得られる差分波を周波数分析して周波数スペクトル分布を得る。こうした周波数分析によって周波数スペクトル分布を得る処理は公知のどのようなものを用いてもよいことから、ここでの詳しい説明を省略する。
【0019】
渋滞判定部13は、前記周波数スペクトル分布に従って1つの周波数スペクトルを特定し、該特定した周波数スペクトルに基づき導き出される速度により渋滞の発生有無を判定する。この渋滞の発生有無を判定する処理の詳細については後述する(図3参照)。判定出力部14は、例えば「渋滞発生中」、「渋滞追突注意」などといった渋滞が発生していることの注意を運転者に対し促す表示が可能な電光掲示板、あるいは道路状況を一括管理する道路管制センター等に設けられた交通管制制御装置などの外部装置に対して、前記判定した渋滞の発生有無を出力する。
【0020】
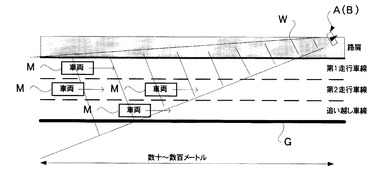
ここで、本発明に係る渋滞検知装置の片側複数車線の道路における設置態様の一例を図2に示す。図2に示すように、本発明に係る渋滞検知装置は、例えば路肩や中央分離帯のガードレールGなどといった、第1走行車線(あるいは登坂車線),第2走行車線, 追い越し車線などからなる片側複数車線の道路全体を見渡すことができる任意の箇所の道路脇に設置される。
【0021】
渋滞検知装置を道路脇に設置する際には、特にセンサ部Aのレーダー発射部1(図1参照)が渋滞発生の監視対象とする片側複数車線全てをカバーしつつ、かつ各車線上を走行する車両Mに対向する向きに超音波やマイクロ波あるいはミリ波などのビームW(電波)を所定範囲以上(例えば数十〜数百メートルの範囲)の走行方向にわたって届くように放射状に発射(放射)することができ、また反射波受信部2(図1参照)が片側複数車線のいずれの車線上を走行中の1乃至複数のどの車両Mからであっても前記放射されたビーム(電波)の反射波を受信することができるように、センサ部Aのレーダー発射部1や反射波受信部2の角度や高さなどが調整されて設置される。
【0022】
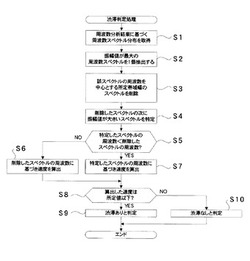
次に、上記した渋滞判定部13による渋滞の発生有無の判定処理について、図3を用いて説明する。図3は、渋滞判定部13による渋滞判定処理の一実施例を示すフローチャートである。ただし、ここでは説明を理解しやすくするために、片側2車線の場合における渋滞判定の手順を例に示している。
【0023】
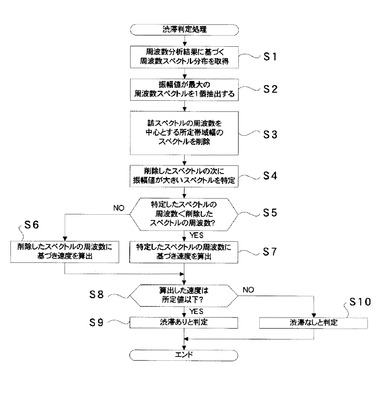
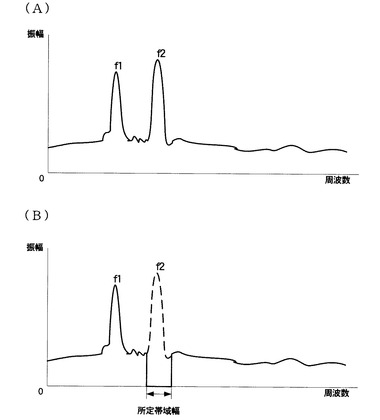
ステップS1は、周波数解析部12(図1参照)から周波数分析結果に基づく周波数スペクトル分布を取得する。ここで、上記周波数解析部12による周波数分析結果である周波数スペクトル分布の一例を図4に示す。図4は片側2車線の道路において検出される周波数分布の一例を示す概念図であり、図4(A)では各車線を走行中の車両がセンサ部A(図1参照)からの距離が異なりかつ速度差がある場合を示している。図4において、縦軸はセンサ部Aからの距離に対応する振幅値であり、横軸は車両の速度に対応する周波数を示す。
【0024】
図4(A)に示すように、片側2車線の道路上においてセンサ部Aからの距離が異なりかつ各車線を速度差のある車が走行中である場合には、異なる振幅値(ピーク値)をもつ2つの大きな周波数スペクトルが現れる。ドップラー周波数f1(以下、単に周波数とも呼ぶ)の周波数スペクトルは他の車両と比較すると相対的に速度が遅くかつセンサ部Aからの距離が遠い車両が存在することを示し、他方ドップラー周波数f2の周波数スペクトルは他の車両と比較すると相対的に速度が速くかつセンサ部Aからの距離が近い車両が存在することを示す。
【0025】
図3の説明に戻って、ステップS2は、前記取得した周波数スペクトル分布に基づき振幅値が最大の(他と比べて突出している)周波数スペクトルを1個抽出する。図4(A)の例では、振幅値が最大の周波数(f2)の周波数スペクトルが抽出されることになる。ただし、ここでは、所定の帯域幅内にある1乃至複数の周波数スペクトルのうち振幅値が最大の周波数スペクトルを代表として抽出するのがよい(後述する図4(B)参照)。なお、上記ステップS2において、振幅値が大きい周波数スペクトルを1つも抽出することができない場合には「渋滞なし」と検知してよい。ステップS3は、前記抽出した振幅値が最大の周波数スペクトルの周波数を中心とする所定帯域幅内にあるすべての周波数スペクトルを削除する。ステップS4は、前記削除した周波数スペクトルの次に振幅値が大きい周波数スペクトルを特定する。
【0026】
図4(B)は、振幅値が最大の周波数スペクトル(f2)及び該周波数スペクトルの周波数を中心とする所定帯域幅内にあるすべての周波数の周波数スペクトルが削除された後の周波数スペクトル分布を示す。上記ステップS3において周波数スペクトルを削除する範囲の所定帯域幅は、所定の速度範囲に相当する。
【0027】
すなわち、一般的に、高速道路のような片側複数車線を走行中の車両の速度を計測すると、特に同じ車線を走行中である複数の各車両の速度には大きな開きがないことが多く、そうした場合には上記周波数スペクトル分布における最大振幅値を持つ周波数スペクトルの前後(両隣)の少なくともいずれかに次の最大振幅値を持つ周波数スペクトルが現れることが多い。そこで、本実施例においては振幅値が一番大きい周波数スペクトル(f2)及び該周波数スペクトルの周波数を中心とする所定帯域幅内にあるすべての周波数の周波数スペクトルを削除する、つまりは非常に近い2つの速度について同時に削除することによって、速度が異なる多くの車両のうち前記所定帯域幅に対応する速度よりも速度が遅い車両を際立たせて抽出するようにしている。これは、特に同じ車線を走行中の複数の車両のうち速度が近いものを1つにまとめて(集約して)処理することを示している。なお、前記所定帯域幅(速度範囲)は、周波数解析部12の周波数分解能によって変えてよいことは言うまでもない。
【0028】
ステップS5は、特定した周波数スペクトルの周波数と削除した周波数スペクトルの周波数とを比較し、特定した周波数スペクトルの周波数が削除した周波数スペクトルの周波数よりも低いか否かを判定する。特定した周波数スペクトルの周波数が削除した周波数スペクトルの周波数よりも低くないと判定した場合には(ステップS5のNO)、削除した周波数スペクトルの周波数に基づき車両の速度を算出する(ステップS6)。
【0029】
一方、特定した周波数スペクトルの周波数が削除した周波数スペクトルの周波数よりも低いと判定した場合には(ステップS5のYES)、特定した周波数スペクトルの周波数に基づき車両の速度を算出する(ステップS7)。図4の例では、特定した周波数スペクトルの周波数(f1)が削除した周波数スペクトルの周波数(f2)よりも低いことから、特定した周波数スペクトルの周波数(f1)に基づき車両の速度を算出することになる。このようにして、前記特定した振幅値が小さい周波数スペクトルの周波数と他の周波数スペクトルの周波数とを比較して、周波数が小さい方の周波数スペクトルから車両の速度を算出する。なお、上記ステップS5において、特定した周波数スペクトルの周波数の振幅値が「0」に近い場合には、削除した周波数スペクトルの周波数との比較を行うことなくステップS6の処理へ行く。
【0030】
上記したステップS6,ステップS7の各処理において、(それぞれ削除、特定、抽出した)1個の周波数スペクトルの周波数(ドップラー周波数)に基づき車両の速度を算出するには、数1に示すようなドップラーの公式を利用する。
(数1)
f=2V/λ=161・V
ここで、fはドップラー周波数、Vは車両の速度(m/sec)、λはレーダー発射部1から発射されるビーム(電波)の波長である。波長λについて、レーダー発射部1から発射されるビーム(電波)の送信周波数が例えば24.15GHzである場合には、数1の「2/λ」は約「161」となる(λ=0.012422メートル)。そして、速度(m/s)を時速(km/h)に変換するには3.6倍(60×60/100)すればよいことから、車両の速度(時速)は下記に示す数2により算出されることになる。
(数2)
V=f×3.6/161(km/h)
なお、ドップラー周波数fを求める方式としては、パルスカウント方式、レシプロカル方式、周波数測定方式などが従来公知である。このうち、周波数測定方式は、信号処理でSN比の改善をはかることが簡易であり、また他の方式と比べると非常に感度がよいという特徴を持つことから、本発明に係る渋滞検知装置においても採用するのに最適である。
【0031】
上記したステップS6又はステップS7の各処理後、それぞれの処理によって算出された速度が所定値(例えば、高速道路では毎時40キロメートル)以下であるか否かを判定する(ステップS8)。算出した速度が所定値以下であると判定した場合には(ステップS8のYES)、予め決められた渋滞状態を表す所定の速度以下で車両が走行中であることから「渋滞あり」と判定する(ステップS9)。この場合、少なくとも2車線のうちの少なくともいずれか一方において渋滞が発生していれば「渋滞あり」と検知することになる。これは、両車線において渋滞が発生している場合は勿論のこと、例えば高速道路のインター出口渋滞などのような1車線のみが渋滞している場合においても、渋滞最後尾車両への追突などの事故を防止するために運転者に対して注意を促すことができるようにするために、「渋滞あり」と検知するようにしている。
【0032】
一方、算出した速度が所定値以下でないと判定した場合には(ステップS8のNO)、所定値以上の速度で車両が走行中であることから「渋滞なし」と判定する(ステップS10)。この場合、2車線の両車線共に渋滞が発生しておらず、特に運転者に対して注意を促す必要がないために「渋滞なし」と検知する。
【0033】
なお、上記図3では片側2車線の場合における渋滞判定の処理を例に示したが、車線数が片側3車線あるいはそれ以上である場合においても、上記したように取得した周波数スペクトル分布に基づき振幅値が低い周波数スペクトルを特定し、該特定した周波数スペクトルの周波数に基づき車両の速度を算出すればよい。ただし、上述した渋滞検知処理の一部手順等を適宜変更する必要があるのは勿論である。例えば、上記ステップS2〜ステップS4の処理を繰り返すことで、周波数解析部12(図1参照)から取得した周波数分析結果に基づく周波数スペクトル分布に基づいて振幅値が大きい順に1乃至複数の周波数スペクトルを抽出し、該抽出した1乃至複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを特定するようにすればよい。そして、特定した振幅値が小さい周波数スペクトルの周波数と前記抽出した他の周波数スペクトルの周波数とを比較して、周波数が小さい方の周波数スペクトルから渋滞判定のために用いる速度を算出するようにするとよい。
【0034】
ここで、図2に示したような片側3車線の道路における渋滞の検知について、具体例を用いて説明する。第1の例として、3車線全てにおいて車両が1台も走行していない場合(所謂「道ががらがら」である状態)がある。この場合には、振幅値の大きい周波数スペクトルを1つも抽出することができないので、「渋滞なし」と検知される。第2の例として、3車線のいずれか1車線のみを車両が走行している場合がある(他の車線は車両が走行していない)。この場合には、振幅値の大きい周波数スペクトルが1つ抽出されるので、該抽出された車両の速度に応じた1つの周波数スペクトルのみに基づき渋滞判定が行われる。このときに「渋滞あり」と判定されると、これは3車線のうちの1車線のみが渋滞している特有な渋滞を検知したことになる。
【0035】
第3の例として、3車線のうちいずれか2車線を車両が走行している場合がある(1車線は車両が走行していない)。この場合には、各車線を走行中の車両の速度が同じであれば振幅値の大きい周波数スペクトルが1つ、異なっていれば振幅値の大きい周波数スペクトルが2つ抽出されることになる。振幅値の大きい周波数スペクトルが1つのみ抽出された場合には、該抽出された周波数スペクトルのみに基づき渋滞判定が行われる。このときに「渋滞あり」と判定されると、これは3車線のうちの2車線が共に渋滞している特有な渋滞(例えば渋滞発生開始時などに多く見られる渋滞)を検知したことになる。
【0036】
一方、振幅値の大きい周波数スペクトルが2つ抽出された場合には、上述したような振幅値が低いほうの周波数スペクトルの特定処理(上記ステップS4及びステップS5参照)に基づいて決定されるいずれかの周波数スペクトルに基づき渋滞判定が行われる。このときに「渋滞あり」と判定されると、これは3車線のうちのいずれか1車線のみが渋滞している特有な渋滞を検知したことになる。
【0037】
第4の例として、3車線の全ての車線を車両が走行している場合がある。この場合には、各車線を走行中の車両の速度が全て同じであれば振幅値の大きい周波数スペクトルが1つ、いずれか2車線を走行中の車両の速度が同じであれば振幅値の大きい周波数スペクトルが2つ、3車線を走行中の車両の速度が全て異なっていれば振幅値の大きい周波数スペクトルが3つ抽出されることになる。振幅値の大きい周波数スペクトルが1つのみ抽出された場合には、該抽出された周波数スペクトルのみに基づき渋滞判定が行われる。このときに「渋滞あり」と判定されると、これは3車線全てが渋滞している一般的な渋滞を検知したことになる。反対に、「渋滞なし」と判定されると、これは3車線全てにおいて渋滞が発生しておらず車両が順調に走行していることを表す。
【0038】
上記第4の例において振幅値の大きい周波数スペクトルが2つ抽出された場合には、上述したような振幅値が低いほうの周波数スペクトルの特定処理(上記ステップS4及びステップS5参照)に基づいて決定されるいずれかの周波数スペクトルに基づき渋滞判定が行われる。このときに「渋滞あり」と判定されると、これは3車線のうちのいずれか1車線のみ又はいずれか2車線が渋滞している特有な渋滞を検知したことになる。
【0039】
上記第4の例において振幅値の大きい周波数スペクトルが3つ抽出された場合には、上述したような振幅値が低いほうの周波数スペクトルの特定処理(上記ステップS4及びステップS5参照)に基づいて決定されるいずれかの周波数スペクトルに基づき渋滞判定が行われる。このときに「渋滞あり」と判定されると、これは3車線のうちのいずれか1車線のみが渋滞している特有な渋滞を検知したことになる。
【0040】
このようにして、本発明においては、片側複数車線を走行中の1乃至複数の車両に対し放射したビーム(送信波)と、前記車両からの反射波との差分波を周波数分析することによって得られる周波数分析結果に基づいて、渋滞発生の有無を判定する際の車両の速度を算出するために用いる周波数スペクトルを、振幅値が小さい周波数スペクトルを基準に特定する。すなわち、振幅値が大きい順に抽出した複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを特定し、該特定した振幅値が小さい周波数スペクトルの周波数を基準として他の周波数スペクトルの周波数との比較を行い、この比較により得られた周波数が小さい方の周波数スペクトルから車両の速度を算出する。そして、算出した速度を所定値と比較して渋滞発生の有無を判定する。これにより、1つのドップラー方式の検出センサでは検知できなかった特有な渋滞を含む片側複数車線の道路で発生しうる渋滞の発生有無を検知することが、1つのドップラー方式の検出センサを用いるだけでできるようになる。また、こうした装置は小型かつ安価であって持ち運びやすいことから、道路脇への設置が簡易であるし、設置箇所を移動することも容易となる。
【0041】
なお、上述した実施例においては、渋滞検知部B側に周波数解析部12を含む構成としたがこれに限らず、周波数解析部12をセンサ部A側に構成しておき、渋滞検知部Bはセンサ部Aから前記周波数解析部12による周波数分析結果である周波数スペクトル分布を受信して、該受信した周波数スペクトル分布に基づき渋滞検知を行うようにしてもよい。
【0042】
なお、本発明に係る渋滞検知装置は図1に示したようなセンサ部Aと渋滞検知部Bとを共に内蔵する構成に限らず、別途構成された外部の1乃至複数のセンサ部Aと通信可能に接続される構成であってよいことは言うまでもない。その場合、上記した信号出力部3及び信号受信部11は、例えばUSB(ユニバーサル・シリアル・バス)、IEEE1394(アイトリプルイー1394)、ブルートゥース(商標)、赤外線送受信器等の通信インタフェース、さらにはLAN(Local Area Network)やインターネット、電話回線等の有線あるいは無線の通信ネットワークを介して信号やデータ等を送受信することができるネットワークインタフェースであってもよい。
【0043】
上記のようなネットワークインタフェース構成とした場合、道路上の距離が遠く離れた多数の地点に配置された多数のセンサ部Aそれぞれから通信ネットワークを介して信号を受信し、各地点毎での渋滞検知を行うことを1台の渋滞検知部Bのみにより行うことができるようにしてもよい。そうすると、例えば渋滞検知部Bを道路管制センター等に配置しておき、これと各地点に配置した多数のセンサ部Aとを有線又は無線の通信ネットワークで結ぶことによって、道路管制センター等で各地点から出力された出力信号を集中的に管理して道路全体にわたって渋滞発生の有無を検知することが、より簡易な構成であって持ち運び可能な小型のセンサ部Aのみを任意の地点の道路脇に設置するだけで実現することができ非常に便利である。
【符号の説明】
【0044】
A…センサ装置
B…渋滞検知装置
G…ガードレール(又は中央分離帯)
M…車両
W…ビーム(電波)
1…レーダー発射部
2…反射波受信部
3…信号出力部
11…信号受信部
12…周波数解析部
13…渋滞判定部
14…判定出力部
【技術分野】
【0001】
本発明は、道路上で発生する渋滞を検知する渋滞検知装置及びプログラムに関し、特に1つのドップラー方式の検出センサを用いて片側複数車線の道路における渋滞の発生有無を検知する技術に関する。
【背景技術】
【0002】
従来から、道路上を走行する通行車両に向けて超音波やマイクロ波等のビーム(電波)を発射し、道路上を走行中の車両からの反射波を受信することに応じて、該道路上における渋滞の発生有無を検知する、所謂ドップラー方式の検出センサを用いた渋滞検知装置(単にドップラー方式の渋滞検知装置とも呼ぶ)が知られている。ドップラー方式の検出センサを用いた装置の一例を挙げると、下記に示す特許文献1又は特許文献2に記載の装置などがある。
【0003】
従来知られたドップラー方式の渋滞検知装置においては、発射したビーム(電波)と受信した反射波との差分波を周波数分析することによって得られる周波数スペクトル分布に従い、車両の速度と相関関係がある複数の周波数スペクトルの中から最も振幅値(ピーク値)が大きい周波数スペクトルを1つ特定し、該特定した周波数スペクトルの周波数(つまりはドップラー周波数)に基づく速度が所定値以下(例えば、高速道路では毎時40キロメートル(km/h)以下など)であれば、該道路上において渋滞が発生したと検知する。すなわち、道路上を一番速く走行している車両の速度を特定し、該速度が所定速度を下回っているか否かによって渋滞の発生有無を検知するようになっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−288674号公報
【特許文献2】特開2008−51613号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したように、従来知られたドップラー方式の渋滞検知装置においては、受信した反射波に基づく周波数スペクトル分布のうち最もピーク値が大きい周波数スペクトルを特定し、該特定した周波数スペクトルに基づく車速(つまりは、道路上を一番速く走行している車両の速度)が所定速度を下回っていれば全ての車両が当然に所定速度を下回るので渋滞が発生していると看做す発想しかない。そのため、追い越し車線及び走行車線からなる片側2車線あるいは追い越し車線及び第1,第2走行車線からなる片側3車線などといった片側複数車線の道路において、例えば1車線のみ(又は3車線のうちの2車線)が渋滞しているような場合(具体例をあげると高速道路のインター出口渋滞、渋滞発生開始時、渋滞解消時などであって、このような状態は特に高速道路などにおいて往々にして発生するが、これを便宜的に特有な渋滞と呼ぶ)、従来では1つのドップラー方式の検出センサを用いただけではこうした特有な渋滞を検知することができなかった。これは、複数車線のうち渋滞中の車線以外では車両が順調に流れて走行していることから、渋滞中の車線以外を走行中の車両の速度は所定速度を下回ることがないことに起因する。
【0006】
そこで、この点を解決するために、片側複数車線の各車線(レーン)毎にドップラー式の検知センサを配置しておき、各車線個別に該車線上を走行中の車両の速度を検知することによって、片側複数車線における前記特有な渋滞を含む全ての渋滞の発生有無を検知させるようにしていた(これは、いうなれば複数のドップラー方式の検出センサを用いた渋滞検知装置である)。
【0007】
しかし、上述したようにドップラー式の検知センサを片側複数車線の各車線毎に配置する場合、道路に架橋するなどの大掛かりな工事が必要であり設置が容易でないこと、また複数車線のうち特定の1車線のみに関して走行中の車両の速度を確実に検出させるためにビームの指向方向などをそれぞれ勘案して複数のドップラー式の検知センサをそれぞれ正確に取り付けしなければならず面倒であること、さらに渋滞が発生しやすい場所が道路事情等によって変わったとしても、架橋するなどして一度設置されてしまうと容易に移動させることができずに役に立たなくなってしまう恐れがあることなどの問題がある。
【0008】
以上のように、従来のドップラー式の検知センサを利用した装置は片側複数車線の道路における渋滞を検知するのには設置の観点から全く向いておらず、ましてや1つのドップラー式の検知センサを用いただけでは片側複数車線の道路における渋滞、特には上記したような片側複数車線の道路で発生しうる特有な渋滞の発生有無を検知することは不可能であった。
【0009】
また、上述したドップラー方式の渋滞検知装置とは別に、1台の検知センサのみを用いて片側複数車線の道路における渋滞を検知する装置がある。その一例として、複数車線に渡る大型のループコイルを道路に埋め込んでおき、このループコイル上を車が通過することによる磁界の乱れから車両の通過時刻を測定することに応じて、数メートルという狭い範囲で当該車両の速度を求め、この車両の速度が所定速度よりも速いか否かによって渋滞を検知するループコイル方式の検知センサを用いた渋滞検知装置が従来知られている。しかし、こうしたループコイル方式の渋滞検知装置はループコイルそのものが大変高価であるし、またループコイルを路面下に埋設するといった大掛かりな工事が必要とされることから、上述したドップラー方式の渋滞検知装置と同様に使い勝手が悪いと言える。
【0010】
本発明は上述の点に鑑みてなされたもので、1つのドップラー方式の検出センサを用いて片側複数車線の道路における渋滞の発生有無を検知することが可能な、小型かつ安価な渋滞検知装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明に係る渋滞検知装置は、片側複数車線を走行中の1乃至複数の車両に対し送信波を放射すると共に前記車両からの反射波を受信するセンサ手段と、前記送信波と前記反射波との差分波を周波数分析する周波数分析手段と、前記周波数分析手段による周波数分析結果に基づいて振幅値が大きい順に1乃至複数の周波数スペクトルを抽出し、該抽出した1乃至複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを特定する特定手段と、前記特定した振幅値が小さい周波数スペクトルの周波数と前記抽出した他の周波数スペクトルの周波数とを比較して、周波数が小さい方の周波数スペクトルから速度を算出する算出手段と、前記算出した速度を所定値と比較して渋滞発生の有無を判定する判定手段とを具える。
【0012】
本発明によれば、片側複数車線を走行中の1乃至複数の車両に対し放射した送信波と、前記車両からの反射波との差分波を周波数分析することによって得られる周波数分析結果に基づいて、渋滞発生の有無を判定する際の車両の速度を算出するために用いる周波数スペクトルを、振幅値が大きい順に抽出した複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを基準に特定するようにした。すなわち、振幅値が小さい周波数スペクトルを特定し、該特定した振幅値が小さい周波数スペクトルの周波数を基準として抽出した他の周波数スペクトルの周波数との比較を行い、この比較により得られた周波数が小さい方の周波数スペクトルから速度を算出する。そして、算出した速度を所定値と比較して渋滞発生の有無を判定する。これにより、例えば高速道路等でよく見られる特有な渋滞を含む片側複数車線の道路で発生しうる渋滞の発生有無を検知することが、1つのドップラー方式の検出センサを用いるだけでできるようになる。また、こうした装置は小型かつ安価であって持ち運びやすいことから、道路脇への設置が簡易であるし、設置箇所を移動することも容易となる。
【0013】
本発明は装置の発明として構成し実施することができるのみならず、方法の発明として構成し実施することができる。また、本発明は、コンピュータまたはDSP等のプロセッサのプログラムの形態で実施することができるし、そのようなプログラムを記憶した記憶媒体の形態で実施することもできる。
【発明の効果】
【0014】
本発明によれば、振幅値が大きい順に抽出した複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを基準に他の周波数スペクトルとの比較を行うことによって、片側複数車線の道路で発生しうる渋滞の発生有無の検知を行うのに用いる車両の速度を算出するようにしたことから、1つのドップラー方式の検出センサを用いるだけで片側複数車線の道路で発生しうる特有な渋滞を含む全ての渋滞についてその発生有無を検知することができるようになる、という効果を奏する。
【図面の簡単な説明】
【0015】
【図1】本発明に係る渋滞検知装置の一実施例を示す概念図である。
【図2】本発明に係る渋滞検知装置の片側複数車線の道路における設置態様の一例を示す概念図である。
【図3】渋滞判定処理の一実施例を示すフローチャートである。
【図4】片側2車線の道路において検出される周波数分布の一例を示す概念図である。
【発明を実施するための形態】
【0016】
以下、この発明の実施の形態を添付図面に従って詳細に説明する。
【0017】
図1は、本発明に係る渋滞検知装置の一実施例を示す概念図である。本発明に係る渋滞検知装置は、センサ部Aと渋滞検知部Bとを含んでなる。センサ部Aは、後述する図2に示すように片側複数車線の道路脇に設置されており、複数車線を走行中の車両の速度をドップラー方式にて計測検知するためにビーム(電波)を複数車線全体にわたって放射状に発射すると共に、該ビームの放射に応じて該複数車線上を走行中の車両からの反射波を受信し、該受信した反射波を出力信号として出力できるようになっている。すなわち、センサ部Aは複数車線全体にわたって予め決められた所定の送信周波数(例えば24.15GHz)のビーム(電波:送信波)を放射するレーダー発射部1と、複数車線上を走行中の車両からの反射波を受信する反射波受信部2と、さらに渋滞検知部Bに対して前記受信した反射波を出力する信号出力部3とを具える。
【0018】
他方、渋滞検知装置Bは、信号受信部11と、周波数解析部12と、渋滞判定部13と、判定出力部14とを具える。信号受信部11は、センサ部Aから出力される反射波を取得する。周波数解析部12は、前記取得した反射波と前記センサ部Aから放射されるビーム(電波:送信波)との比較により得られる差分波を周波数分析して周波数スペクトル分布を得る。こうした周波数分析によって周波数スペクトル分布を得る処理は公知のどのようなものを用いてもよいことから、ここでの詳しい説明を省略する。
【0019】
渋滞判定部13は、前記周波数スペクトル分布に従って1つの周波数スペクトルを特定し、該特定した周波数スペクトルに基づき導き出される速度により渋滞の発生有無を判定する。この渋滞の発生有無を判定する処理の詳細については後述する(図3参照)。判定出力部14は、例えば「渋滞発生中」、「渋滞追突注意」などといった渋滞が発生していることの注意を運転者に対し促す表示が可能な電光掲示板、あるいは道路状況を一括管理する道路管制センター等に設けられた交通管制制御装置などの外部装置に対して、前記判定した渋滞の発生有無を出力する。
【0020】
ここで、本発明に係る渋滞検知装置の片側複数車線の道路における設置態様の一例を図2に示す。図2に示すように、本発明に係る渋滞検知装置は、例えば路肩や中央分離帯のガードレールGなどといった、第1走行車線(あるいは登坂車線),第2走行車線, 追い越し車線などからなる片側複数車線の道路全体を見渡すことができる任意の箇所の道路脇に設置される。
【0021】
渋滞検知装置を道路脇に設置する際には、特にセンサ部Aのレーダー発射部1(図1参照)が渋滞発生の監視対象とする片側複数車線全てをカバーしつつ、かつ各車線上を走行する車両Mに対向する向きに超音波やマイクロ波あるいはミリ波などのビームW(電波)を所定範囲以上(例えば数十〜数百メートルの範囲)の走行方向にわたって届くように放射状に発射(放射)することができ、また反射波受信部2(図1参照)が片側複数車線のいずれの車線上を走行中の1乃至複数のどの車両Mからであっても前記放射されたビーム(電波)の反射波を受信することができるように、センサ部Aのレーダー発射部1や反射波受信部2の角度や高さなどが調整されて設置される。
【0022】
次に、上記した渋滞判定部13による渋滞の発生有無の判定処理について、図3を用いて説明する。図3は、渋滞判定部13による渋滞判定処理の一実施例を示すフローチャートである。ただし、ここでは説明を理解しやすくするために、片側2車線の場合における渋滞判定の手順を例に示している。
【0023】
ステップS1は、周波数解析部12(図1参照)から周波数分析結果に基づく周波数スペクトル分布を取得する。ここで、上記周波数解析部12による周波数分析結果である周波数スペクトル分布の一例を図4に示す。図4は片側2車線の道路において検出される周波数分布の一例を示す概念図であり、図4(A)では各車線を走行中の車両がセンサ部A(図1参照)からの距離が異なりかつ速度差がある場合を示している。図4において、縦軸はセンサ部Aからの距離に対応する振幅値であり、横軸は車両の速度に対応する周波数を示す。
【0024】
図4(A)に示すように、片側2車線の道路上においてセンサ部Aからの距離が異なりかつ各車線を速度差のある車が走行中である場合には、異なる振幅値(ピーク値)をもつ2つの大きな周波数スペクトルが現れる。ドップラー周波数f1(以下、単に周波数とも呼ぶ)の周波数スペクトルは他の車両と比較すると相対的に速度が遅くかつセンサ部Aからの距離が遠い車両が存在することを示し、他方ドップラー周波数f2の周波数スペクトルは他の車両と比較すると相対的に速度が速くかつセンサ部Aからの距離が近い車両が存在することを示す。
【0025】
図3の説明に戻って、ステップS2は、前記取得した周波数スペクトル分布に基づき振幅値が最大の(他と比べて突出している)周波数スペクトルを1個抽出する。図4(A)の例では、振幅値が最大の周波数(f2)の周波数スペクトルが抽出されることになる。ただし、ここでは、所定の帯域幅内にある1乃至複数の周波数スペクトルのうち振幅値が最大の周波数スペクトルを代表として抽出するのがよい(後述する図4(B)参照)。なお、上記ステップS2において、振幅値が大きい周波数スペクトルを1つも抽出することができない場合には「渋滞なし」と検知してよい。ステップS3は、前記抽出した振幅値が最大の周波数スペクトルの周波数を中心とする所定帯域幅内にあるすべての周波数スペクトルを削除する。ステップS4は、前記削除した周波数スペクトルの次に振幅値が大きい周波数スペクトルを特定する。
【0026】
図4(B)は、振幅値が最大の周波数スペクトル(f2)及び該周波数スペクトルの周波数を中心とする所定帯域幅内にあるすべての周波数の周波数スペクトルが削除された後の周波数スペクトル分布を示す。上記ステップS3において周波数スペクトルを削除する範囲の所定帯域幅は、所定の速度範囲に相当する。
【0027】
すなわち、一般的に、高速道路のような片側複数車線を走行中の車両の速度を計測すると、特に同じ車線を走行中である複数の各車両の速度には大きな開きがないことが多く、そうした場合には上記周波数スペクトル分布における最大振幅値を持つ周波数スペクトルの前後(両隣)の少なくともいずれかに次の最大振幅値を持つ周波数スペクトルが現れることが多い。そこで、本実施例においては振幅値が一番大きい周波数スペクトル(f2)及び該周波数スペクトルの周波数を中心とする所定帯域幅内にあるすべての周波数の周波数スペクトルを削除する、つまりは非常に近い2つの速度について同時に削除することによって、速度が異なる多くの車両のうち前記所定帯域幅に対応する速度よりも速度が遅い車両を際立たせて抽出するようにしている。これは、特に同じ車線を走行中の複数の車両のうち速度が近いものを1つにまとめて(集約して)処理することを示している。なお、前記所定帯域幅(速度範囲)は、周波数解析部12の周波数分解能によって変えてよいことは言うまでもない。
【0028】
ステップS5は、特定した周波数スペクトルの周波数と削除した周波数スペクトルの周波数とを比較し、特定した周波数スペクトルの周波数が削除した周波数スペクトルの周波数よりも低いか否かを判定する。特定した周波数スペクトルの周波数が削除した周波数スペクトルの周波数よりも低くないと判定した場合には(ステップS5のNO)、削除した周波数スペクトルの周波数に基づき車両の速度を算出する(ステップS6)。
【0029】
一方、特定した周波数スペクトルの周波数が削除した周波数スペクトルの周波数よりも低いと判定した場合には(ステップS5のYES)、特定した周波数スペクトルの周波数に基づき車両の速度を算出する(ステップS7)。図4の例では、特定した周波数スペクトルの周波数(f1)が削除した周波数スペクトルの周波数(f2)よりも低いことから、特定した周波数スペクトルの周波数(f1)に基づき車両の速度を算出することになる。このようにして、前記特定した振幅値が小さい周波数スペクトルの周波数と他の周波数スペクトルの周波数とを比較して、周波数が小さい方の周波数スペクトルから車両の速度を算出する。なお、上記ステップS5において、特定した周波数スペクトルの周波数の振幅値が「0」に近い場合には、削除した周波数スペクトルの周波数との比較を行うことなくステップS6の処理へ行く。
【0030】
上記したステップS6,ステップS7の各処理において、(それぞれ削除、特定、抽出した)1個の周波数スペクトルの周波数(ドップラー周波数)に基づき車両の速度を算出するには、数1に示すようなドップラーの公式を利用する。
(数1)
f=2V/λ=161・V
ここで、fはドップラー周波数、Vは車両の速度(m/sec)、λはレーダー発射部1から発射されるビーム(電波)の波長である。波長λについて、レーダー発射部1から発射されるビーム(電波)の送信周波数が例えば24.15GHzである場合には、数1の「2/λ」は約「161」となる(λ=0.012422メートル)。そして、速度(m/s)を時速(km/h)に変換するには3.6倍(60×60/100)すればよいことから、車両の速度(時速)は下記に示す数2により算出されることになる。
(数2)
V=f×3.6/161(km/h)
なお、ドップラー周波数fを求める方式としては、パルスカウント方式、レシプロカル方式、周波数測定方式などが従来公知である。このうち、周波数測定方式は、信号処理でSN比の改善をはかることが簡易であり、また他の方式と比べると非常に感度がよいという特徴を持つことから、本発明に係る渋滞検知装置においても採用するのに最適である。
【0031】
上記したステップS6又はステップS7の各処理後、それぞれの処理によって算出された速度が所定値(例えば、高速道路では毎時40キロメートル)以下であるか否かを判定する(ステップS8)。算出した速度が所定値以下であると判定した場合には(ステップS8のYES)、予め決められた渋滞状態を表す所定の速度以下で車両が走行中であることから「渋滞あり」と判定する(ステップS9)。この場合、少なくとも2車線のうちの少なくともいずれか一方において渋滞が発生していれば「渋滞あり」と検知することになる。これは、両車線において渋滞が発生している場合は勿論のこと、例えば高速道路のインター出口渋滞などのような1車線のみが渋滞している場合においても、渋滞最後尾車両への追突などの事故を防止するために運転者に対して注意を促すことができるようにするために、「渋滞あり」と検知するようにしている。
【0032】
一方、算出した速度が所定値以下でないと判定した場合には(ステップS8のNO)、所定値以上の速度で車両が走行中であることから「渋滞なし」と判定する(ステップS10)。この場合、2車線の両車線共に渋滞が発生しておらず、特に運転者に対して注意を促す必要がないために「渋滞なし」と検知する。
【0033】
なお、上記図3では片側2車線の場合における渋滞判定の処理を例に示したが、車線数が片側3車線あるいはそれ以上である場合においても、上記したように取得した周波数スペクトル分布に基づき振幅値が低い周波数スペクトルを特定し、該特定した周波数スペクトルの周波数に基づき車両の速度を算出すればよい。ただし、上述した渋滞検知処理の一部手順等を適宜変更する必要があるのは勿論である。例えば、上記ステップS2〜ステップS4の処理を繰り返すことで、周波数解析部12(図1参照)から取得した周波数分析結果に基づく周波数スペクトル分布に基づいて振幅値が大きい順に1乃至複数の周波数スペクトルを抽出し、該抽出した1乃至複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを特定するようにすればよい。そして、特定した振幅値が小さい周波数スペクトルの周波数と前記抽出した他の周波数スペクトルの周波数とを比較して、周波数が小さい方の周波数スペクトルから渋滞判定のために用いる速度を算出するようにするとよい。
【0034】
ここで、図2に示したような片側3車線の道路における渋滞の検知について、具体例を用いて説明する。第1の例として、3車線全てにおいて車両が1台も走行していない場合(所謂「道ががらがら」である状態)がある。この場合には、振幅値の大きい周波数スペクトルを1つも抽出することができないので、「渋滞なし」と検知される。第2の例として、3車線のいずれか1車線のみを車両が走行している場合がある(他の車線は車両が走行していない)。この場合には、振幅値の大きい周波数スペクトルが1つ抽出されるので、該抽出された車両の速度に応じた1つの周波数スペクトルのみに基づき渋滞判定が行われる。このときに「渋滞あり」と判定されると、これは3車線のうちの1車線のみが渋滞している特有な渋滞を検知したことになる。
【0035】
第3の例として、3車線のうちいずれか2車線を車両が走行している場合がある(1車線は車両が走行していない)。この場合には、各車線を走行中の車両の速度が同じであれば振幅値の大きい周波数スペクトルが1つ、異なっていれば振幅値の大きい周波数スペクトルが2つ抽出されることになる。振幅値の大きい周波数スペクトルが1つのみ抽出された場合には、該抽出された周波数スペクトルのみに基づき渋滞判定が行われる。このときに「渋滞あり」と判定されると、これは3車線のうちの2車線が共に渋滞している特有な渋滞(例えば渋滞発生開始時などに多く見られる渋滞)を検知したことになる。
【0036】
一方、振幅値の大きい周波数スペクトルが2つ抽出された場合には、上述したような振幅値が低いほうの周波数スペクトルの特定処理(上記ステップS4及びステップS5参照)に基づいて決定されるいずれかの周波数スペクトルに基づき渋滞判定が行われる。このときに「渋滞あり」と判定されると、これは3車線のうちのいずれか1車線のみが渋滞している特有な渋滞を検知したことになる。
【0037】
第4の例として、3車線の全ての車線を車両が走行している場合がある。この場合には、各車線を走行中の車両の速度が全て同じであれば振幅値の大きい周波数スペクトルが1つ、いずれか2車線を走行中の車両の速度が同じであれば振幅値の大きい周波数スペクトルが2つ、3車線を走行中の車両の速度が全て異なっていれば振幅値の大きい周波数スペクトルが3つ抽出されることになる。振幅値の大きい周波数スペクトルが1つのみ抽出された場合には、該抽出された周波数スペクトルのみに基づき渋滞判定が行われる。このときに「渋滞あり」と判定されると、これは3車線全てが渋滞している一般的な渋滞を検知したことになる。反対に、「渋滞なし」と判定されると、これは3車線全てにおいて渋滞が発生しておらず車両が順調に走行していることを表す。
【0038】
上記第4の例において振幅値の大きい周波数スペクトルが2つ抽出された場合には、上述したような振幅値が低いほうの周波数スペクトルの特定処理(上記ステップS4及びステップS5参照)に基づいて決定されるいずれかの周波数スペクトルに基づき渋滞判定が行われる。このときに「渋滞あり」と判定されると、これは3車線のうちのいずれか1車線のみ又はいずれか2車線が渋滞している特有な渋滞を検知したことになる。
【0039】
上記第4の例において振幅値の大きい周波数スペクトルが3つ抽出された場合には、上述したような振幅値が低いほうの周波数スペクトルの特定処理(上記ステップS4及びステップS5参照)に基づいて決定されるいずれかの周波数スペクトルに基づき渋滞判定が行われる。このときに「渋滞あり」と判定されると、これは3車線のうちのいずれか1車線のみが渋滞している特有な渋滞を検知したことになる。
【0040】
このようにして、本発明においては、片側複数車線を走行中の1乃至複数の車両に対し放射したビーム(送信波)と、前記車両からの反射波との差分波を周波数分析することによって得られる周波数分析結果に基づいて、渋滞発生の有無を判定する際の車両の速度を算出するために用いる周波数スペクトルを、振幅値が小さい周波数スペクトルを基準に特定する。すなわち、振幅値が大きい順に抽出した複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを特定し、該特定した振幅値が小さい周波数スペクトルの周波数を基準として他の周波数スペクトルの周波数との比較を行い、この比較により得られた周波数が小さい方の周波数スペクトルから車両の速度を算出する。そして、算出した速度を所定値と比較して渋滞発生の有無を判定する。これにより、1つのドップラー方式の検出センサでは検知できなかった特有な渋滞を含む片側複数車線の道路で発生しうる渋滞の発生有無を検知することが、1つのドップラー方式の検出センサを用いるだけでできるようになる。また、こうした装置は小型かつ安価であって持ち運びやすいことから、道路脇への設置が簡易であるし、設置箇所を移動することも容易となる。
【0041】
なお、上述した実施例においては、渋滞検知部B側に周波数解析部12を含む構成としたがこれに限らず、周波数解析部12をセンサ部A側に構成しておき、渋滞検知部Bはセンサ部Aから前記周波数解析部12による周波数分析結果である周波数スペクトル分布を受信して、該受信した周波数スペクトル分布に基づき渋滞検知を行うようにしてもよい。
【0042】
なお、本発明に係る渋滞検知装置は図1に示したようなセンサ部Aと渋滞検知部Bとを共に内蔵する構成に限らず、別途構成された外部の1乃至複数のセンサ部Aと通信可能に接続される構成であってよいことは言うまでもない。その場合、上記した信号出力部3及び信号受信部11は、例えばUSB(ユニバーサル・シリアル・バス)、IEEE1394(アイトリプルイー1394)、ブルートゥース(商標)、赤外線送受信器等の通信インタフェース、さらにはLAN(Local Area Network)やインターネット、電話回線等の有線あるいは無線の通信ネットワークを介して信号やデータ等を送受信することができるネットワークインタフェースであってもよい。
【0043】
上記のようなネットワークインタフェース構成とした場合、道路上の距離が遠く離れた多数の地点に配置された多数のセンサ部Aそれぞれから通信ネットワークを介して信号を受信し、各地点毎での渋滞検知を行うことを1台の渋滞検知部Bのみにより行うことができるようにしてもよい。そうすると、例えば渋滞検知部Bを道路管制センター等に配置しておき、これと各地点に配置した多数のセンサ部Aとを有線又は無線の通信ネットワークで結ぶことによって、道路管制センター等で各地点から出力された出力信号を集中的に管理して道路全体にわたって渋滞発生の有無を検知することが、より簡易な構成であって持ち運び可能な小型のセンサ部Aのみを任意の地点の道路脇に設置するだけで実現することができ非常に便利である。
【符号の説明】
【0044】
A…センサ装置
B…渋滞検知装置
G…ガードレール(又は中央分離帯)
M…車両
W…ビーム(電波)
1…レーダー発射部
2…反射波受信部
3…信号出力部
11…信号受信部
12…周波数解析部
13…渋滞判定部
14…判定出力部
【特許請求の範囲】
【請求項1】
片側複数車線を走行中の1乃至複数の車両に対し送信波を放射すると共に前記車両からの反射波を受信するセンサ手段と、
前記送信波と前記反射波との差分波を周波数分析する周波数分析手段と、
前記周波数分析手段による周波数分析結果に基づいて振幅値が大きい順に1乃至複数の周波数スペクトルを抽出し、該抽出した1乃至複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを特定する特定手段と、
前記特定した振幅値が小さい周波数スペクトルの周波数と前記抽出した他の周波数スペクトルの周波数とを比較して、周波数が小さい方の周波数スペクトルから速度を算出する算出手段と、
前記算出した速度を所定値と比較して渋滞発生の有無を判定する判定手段と
を具える渋滞検知装置。
【請求項2】
前記特定手段は周波数スペクトルを抽出する際に、所定の帯域幅内にある1乃至複数の周波数スペクトルのうち振幅値が最大の周波数スペクトルを代表として順次に抽出することを特徴とする請求項1に記載の渋滞検知装置。
【請求項3】
コンピュータに、
片側複数車線を走行中の1乃至複数の車両に対し送信波を放射すると共に前記車両からの反射波を受信する手順と、
前記送信波と前記反射波との差分波を周波数分析する手順と、
前記周波数分析による周波数分析結果に基づいて振幅値が大きい順に1乃至複数の周波数スペクトルを抽出し、該抽出した1乃至複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを特定する手順と、
前記特定した振幅値が小さい周波数スペクトルの周波数と前記抽出した他の周波数スペクトルの周波数とを比較して、周波数が小さい方の周波数スペクトルから速度を算出する手順と、
前記算出した速度を所定値と比較して渋滞発生の有無を判定する手順と
を実行させるためのプログラム。
【請求項1】
片側複数車線を走行中の1乃至複数の車両に対し送信波を放射すると共に前記車両からの反射波を受信するセンサ手段と、
前記送信波と前記反射波との差分波を周波数分析する周波数分析手段と、
前記周波数分析手段による周波数分析結果に基づいて振幅値が大きい順に1乃至複数の周波数スペクトルを抽出し、該抽出した1乃至複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを特定する特定手段と、
前記特定した振幅値が小さい周波数スペクトルの周波数と前記抽出した他の周波数スペクトルの周波数とを比較して、周波数が小さい方の周波数スペクトルから速度を算出する算出手段と、
前記算出した速度を所定値と比較して渋滞発生の有無を判定する判定手段と
を具える渋滞検知装置。
【請求項2】
前記特定手段は周波数スペクトルを抽出する際に、所定の帯域幅内にある1乃至複数の周波数スペクトルのうち振幅値が最大の周波数スペクトルを代表として順次に抽出することを特徴とする請求項1に記載の渋滞検知装置。
【請求項3】
コンピュータに、
片側複数車線を走行中の1乃至複数の車両に対し送信波を放射すると共に前記車両からの反射波を受信する手順と、
前記送信波と前記反射波との差分波を周波数分析する手順と、
前記周波数分析による周波数分析結果に基づいて振幅値が大きい順に1乃至複数の周波数スペクトルを抽出し、該抽出した1乃至複数の周波数スペクトルのうち振幅値が小さい周波数スペクトルを特定する手順と、
前記特定した振幅値が小さい周波数スペクトルの周波数と前記抽出した他の周波数スペクトルの周波数とを比較して、周波数が小さい方の周波数スペクトルから速度を算出する手順と、
前記算出した速度を所定値と比較して渋滞発生の有無を判定する手順と
を実行させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−237727(P2010−237727A)
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願番号】特願2009−81728(P2009−81728)
【出願日】平成21年3月30日(2009.3.30)
【出願人】(509089351)株式会社サイデン (2)
【出願人】(507194017)株式会社高速道路総合技術研究所 (33)
【出願人】(504254345)有限会社松野企画 (2)
【Fターム(参考)】
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願日】平成21年3月30日(2009.3.30)
【出願人】(509089351)株式会社サイデン (2)
【出願人】(507194017)株式会社高速道路総合技術研究所 (33)
【出願人】(504254345)有限会社松野企画 (2)
【Fターム(参考)】
[ Back to top ]