
渋滞範囲予測方法および装置
【課題】突発事象による渋滞が発生した場合、経路探索を繰り返すことなく、確実に渋滞範囲を回避する経路を提示する。
【解決手段】突発事象の情報を含む交通情報を取得する交通情報取得ステップと、突発事象により発生した渋滞の渋滞開始時刻,渋滞解消時刻の少なくとも一方の時刻をメッシュごとに予測する渋滞到達時刻予測ステップと、出発位置および出発時刻に基づき出発位置周辺のメッシュごとに出発地からの到達時刻を予測する到達時刻予測ステップと、突発事象により発生した渋滞が解消するまでの間に、渋滞の影響を受ける渋滞の範囲を算出する渋滞影響範囲算出ステップと、を実行し、求めた渋滞影響範囲を回避するように経路を設定することで、将来に渡って確実に渋滞を回避することができ、また、経路探索回数を削減することができる。
【解決手段】突発事象の情報を含む交通情報を取得する交通情報取得ステップと、突発事象により発生した渋滞の渋滞開始時刻,渋滞解消時刻の少なくとも一方の時刻をメッシュごとに予測する渋滞到達時刻予測ステップと、出発位置および出発時刻に基づき出発位置周辺のメッシュごとに出発地からの到達時刻を予測する到達時刻予測ステップと、突発事象により発生した渋滞が解消するまでの間に、渋滞の影響を受ける渋滞の範囲を算出する渋滞影響範囲算出ステップと、を実行し、求めた渋滞影響範囲を回避するように経路を設定することで、将来に渡って確実に渋滞を回避することができ、また、経路探索回数を削減することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーションシステムに関わり、特に渋滞の範囲を算出し、その範囲を回避する経路を提供するシステムに関する。
【背景技術】
【0002】
近年、ナビゲーションシステムを用いて現在地から目的地までの経路を誘導する際、最短時間,最短距離,一般道優先などの条件をユーザが選択することにより、ユーザにとって最適な経路を探索し、誘導・案内する技術が普及している。ユーザが最短時間経路を選択した場合、カーナビゲーション装置は現況交通情報および統計交通情報を用いて目的地までの所要時間が最短となる経路を探索する。しかし、突発事象を原因とする突発渋滞は、現況交通情報および統計交通情報を用いて、事前に予測し、回避することが困難である。そのため、そのような渋滞が発生した場合、渋滞に巻き込まれて、目的地に到達するのに予測した以上に時間がかかるという問題が生じた。そこで、渋滞が発生した場合、再度、経路探索を行い、渋滞を回避することにより、渋滞による時間のロスを最低限にとどめようとする技術が開発されてきた。
【0003】
例えば、特開2007−285998号公報に示されるように、最短時間経路上に発生している渋滞箇所に自車が到達する頃の渋滞区間を予測し、予測した渋滞区間の手前にある交差点で、利用者の所望の条件を満たす交差点から迂回を開始して前記予測した渋滞区間を回避する技術が存在する。
【0004】
また、特開2008−268149号公報に示されるように、事故の発生時刻からの経過時間に応じて回避すべき領域の面積を算出し、その領域を回避するよう経路探索を行う技術が存在する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−285998号公報
【特許文献2】特開2008−268149号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に示される技術を突発渋滞に対して用いた場合、現在、誘導・案内を行っている最短時間経路上の突発渋滞の伸縮を予測し回避することはできるが、迂回した後の経路上で当該突発渋滞に起因する渋滞に遭遇するか否かについては予測できない。そのため、突発渋滞を確実に回避するためには、迂回した後の経路上の突発渋滞についても予測を行い、もし、迂回した後の経路上に存在する突発渋滞に自車が遭遇する場合は、再び迂回を行わなければならない。
【0007】
また、特許文献2に示される技術を突発渋滞に対して用いた場合、現在の突発渋滞範囲を回避する経路を探索することができるが、回避した後の経路が、その後拡大した突発渋滞範囲に含まれるか否かについては予測できない。そのため、突発渋滞を確実に回避するためには、再探索処理を繰り返し行う必要がある。
【0008】
すなわち、これら従来技術を用いた場合、確実に突発渋滞を回避するためには、再探索処理を繰り返し行う必要があり、経路探索の回数が増えるとともに、計算量も増加する。この場合、推奨経路が頻繁に変わる可能性があるため、利用者にとっては非常に不便となる。さらに、将来の状況を考慮せずに経路設定を行うため、渋滞を回避できない状況に陥る可能性も大きくなる。
【0009】
そこで本発明は、突発事象による渋滞が発生した場合でも、時間の変化に伴う突発事象の影響範囲の変化を考慮して、予め渋滞の影響範囲を予測しておくことにより、経路の再探索を繰り返すことなく、確実に渋滞範囲を回避する経路を提示することを目的とする。
【課題を解決するための手段】
【0010】
上記の課題を解決すべく、本発明は、突発事象の情報を含む交通情報を取得する交通情報取得ステップと、突発事象による渋滞の開始時刻,解消時刻の少なくとも一方をメッシュごとに予測する渋滞到達時刻予測ステップと、出発位置および出発時刻に基づき出発位置周辺のメッシュごとに出発地からの到達時刻を予測する到達時刻予測ステップと、今後影響を受ける渋滞の範囲を算出する渋滞影響範囲算出ステップと、を実行することを特徴とする。
【0011】
また、地図上に渋滞影響範囲を重畳表示する表示ステップと、求めた渋滞影響範囲に含まれるリンクのリンクコストが大きくなるように再設定した上で経路探索を行う経路探索ステップと、を実行することを特徴とする。
【発明の効果】
【0012】
本発明によれば、将来渋滞に遭遇する可能性のある領域として渋滞影響範囲を設定するため、渋滞影響範囲を回避するように経路を設定することで、将来に渡って渋滞の進展範囲を確実に渋滞を回避することができ、経路再探索回数を削減することができる。
【図面の簡単な説明】
【0013】
【図1】本発明を用いた交通情報システムの構成図である。
【図2】地図情報の構成例を示す図である。
【図3】本発明を用いた交通情報システムの処理を表すフローチャートである。
【図4】渋滞到達時刻予測処理のフローチャートである。
【図5】渋滞伝播モデルを説明する図である。
【図6】渋滞伝播モデルにおける渋滞開始時刻・渋滞解消時刻を示す図である。
【図7】出発地からの到達時刻予測処理のフローチャートである。
【図8】到達時刻予測処理におけるメッシュ単位のダイクストラ法を説明する図である。
【図9】予測情報記憶部に格納されるデータの構成例を示す図である。
【図10】渋滞影響範囲算出処理のフローチャートである。
【図11】渋滞影響範囲の画面表示例を示す図である。
【図12】本発明を用いた交通情報システムの他の構成図である。
【図13】本発明を用いた交通情報システムの処理を表す他のフローチャートである。
【図14】予測情報記憶部に格納されるデータの構成例を示す図である。
【発明を実施するための形態】
【0014】
本発明の実施形態について、図面を参照して説明する。
【実施例1】
【0015】
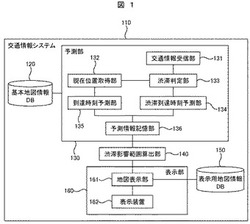
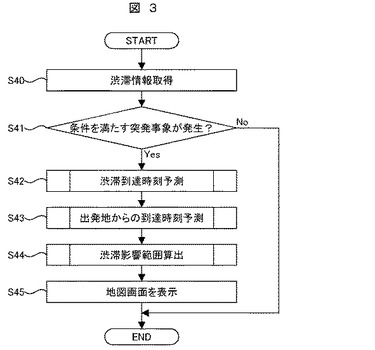
図1は、本発明を用いた交通情報システム110の構成図である。交通情報システム110は、基本地図情報DB120,予測部130,渋滞影響範囲算出部140,表示用地図情報DB150,表示部160とから構成される。
【0016】
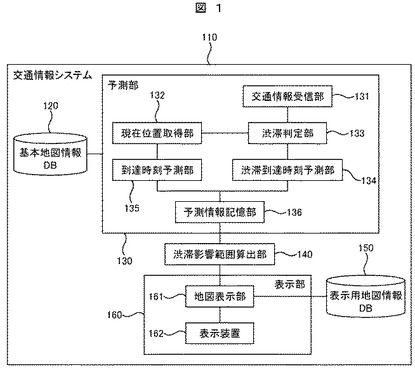
図2は、基本地図情報DB120のデータ構成を示している。基本地図情報DB120は、メッシュについての情報を表すメッシュデータ210と、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ220と、を含み、メッシュごとに格納している。メッシュは、緯度経度に基づいて設定された地図の矩形領域(例えば、緯度差40分,経度差1度の領域)を表す。メッシュの大きさは、ユーザの求める渋滞範囲の分解能,道路の構成などによって、適宜設定して良い。リンクは、道路を構成する要素であり、交差点や分岐などに指定されるノード間を結んだベクトルとして表される。このとき、同じ道路の上り方向と下り方向とは、それぞれ別のリンクとして管理される。
【0017】
メッシュデータ210は、メッシュID211と、メッシュ内平均速度212を含んでいる。メッシュID211は、各メッシュの識別コードを表し、メッシュの地図上の位置に応じて規則的に与えられており、あるメッシュのメッシュID211から隣接するメッシュのメッシュIDを求めることができる。メッシュ内平均速度212は、メッシュ内に含まれるリンクについて、後記する旅行速度224を平均した値が格納される。
【0018】
リンクデータ220は、各リンクの識別コードを表すリンクID221と、高速道路,一般国道などに分類される道路種別222と、リンクの長さを示すリンク長223と、リンクを通過する際の平均速度を表す旅行速度224と、リンクを通過する際に要する所要時間を表す旅行時間225とから構成される。
【0019】
旅行速度224には、各リンクの規制速度が格納される。また、旅行速度224は、予測対象日の日種(曜日,平日/土曜/休日,五十日,天気等)に対応して作成された統計交通情報であっても良い。この場合、予測対象日の日種に該当する過去の日が複数日あったとして、それらの同一時間帯に関するリンク旅行速度の平均値や中央値等の統計値が、リンクの統計旅行速度に該当する。統計交通情報を用いる場合、リンク一つに対し、各日種における各時間帯の交通情報が格納される。旅行時間225は、リンク長223を旅行速度224で除した値であっても良い。
【0020】
予測部130は、交通情報受信部131と、現在位置取得部132と、渋滞判定部133と、渋滞到達時刻予測部134と、到達時刻予測部135と、予測情報記憶部136とから構成される。
【0021】
交通情報受信部131は、FM多重放送受信装置,ビーコン受信装置,携帯電話,無線装置などから現況交通情報および突発事象情報を受信し、渋滞判定部に送る。現況交通情報には、リンクごとの旅行時間,渋滞度などが含まれる。突発事象情報には、規制内容(通行止め,片側規制など),原因事象(事故,工事など),規制対象リンクの道路種別,規制の位置,規制の開始時刻などについての情報が含まれる。FM多重放送受信装置は、FM放送局がFM多重放送信号として送信する概略交通情報(図形など)および文字情報などを受信する。概略交通情報および文字情報は、交通情報センタからFM放送局へ送信された現況交通情報に基づいて作成される。ビーコン受信装置は、交通管制センタが路上の通信装置であるビーコンを介して送信する詳細な現況交通情報を受信する。現況交通情報は、交通情報センタから各地域の交通管制センタへ送信されたものである。ここで、FM多重放送受信装置やビーコン受信装置は、プローブカーから送られてくる車両情報(時刻,走行速度,走行位置の情報など)を走行位置に対応するリンクに関係付けた情報を、現況情報として受信しても良い。
【0022】
現在位置取得部132は、出発地の位置を算出し、また、現在時刻を取得する。このとき、例えば、車速センサ,ジャイロセンサ,GPS受信装置などのうち少なくとも一つから取得した情報に基づき、位置の算出を行う。前記車速センサは、車輪の円周と計測される車輪の回転数の積から走行距離を測定し、さらに対となる車輪の回転数の差から曲がった角度を計測する。前記ジャイロセンサは、光ファイバファイロや振動ジャイロ等で構成され、センサが取り付けられた車両の回転した角度を検出する。ここで出発地とは、交通情報システム110が車載装置に備えられる場合は自車位置とする。また、車載装置と異なる装置、例えば、交通情報センタに交通情報システム110が備えられる場合には、出発地とはユーザが指定した地点、あるいは、車載端末から送られた自車位置とする。
【0023】
渋滞判定部133は、現在位置取得部132から取得した位置情報を考慮し、交通情報受信部131が受信した現況交通情報および突発事象情報から、影響を受ける可能性のある渋滞が発生しているか、あるいは、今後発生するか否かを判定する。具体的には、出発地から所定の距離内(例えば、50km以内)で突発事象が発生している、突発事象の発生時刻が所定の時間範囲内(例えば、現在から1時間前までの間)である、現況交通情報が所定の閾値を超えて急激に変化している(例えば、旅行速度が急激に減少している)、などの条件の中で少なくとも一つが満たされている場合、影響を受ける可能性のある渋滞が発生している、あるいは今後発生すると判定する。影響を受ける可能性のある渋滞が発生している、あるいは今後発生すると判定した場合、現況交通情報および突発事象情報を渋滞到達時刻予測部に送る。
【0024】
渋滞到達時刻予測部134は、渋滞判定部133から取得した現況交通情報と突発事象情報、および基本地図情報DB120から取得した基本地図情報から、突発事象発生位置周辺のメッシュについて、メッシュごとに渋滞開始時刻および渋滞解消時刻を算出する。また、メッシュごとに算出した渋滞開始時刻および渋滞解消時刻を、予測情報記憶部136に送る。
【0025】
到達時刻予測部135は、現在位置取得部132から取得した出発地の位置情報および基本地図情報DB120から取得した基本地図情報に基づき、出発地周辺のメッシュについて、メッシュごとの出発地からの到達時刻を算出する。また、メッシュごとに算出した出発地からの到達時刻を、予測情報記憶部136に送る。
【0026】
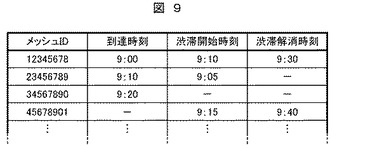
予測情報記憶部136は、渋滞到達時刻予測部134および到達時刻予測部135から送られた、メッシュごとの到達時刻,渋滞開始時刻,渋滞解消時刻を格納する。予測情報記憶部136に格納される予測情報の構成の一例を図9に示す。一つのメッシュIDにつき、到達時刻,渋滞開始時刻,渋滞解消時刻が一つずつ記録される。
【0027】
渋滞影響範囲算出部140は、予測情報記憶部136から、メッシュごとの到達時刻,渋滞開始時刻,渋滞解消時刻を読み取り、各メッシュが渋滞影響範囲に含まれるか否かを判定する。また、その結果を表示部160に送信する。
【0028】
表示用地図情報DB150には、地図表示を行う際に必要となる、道路や、その他構成物の情報が含まれている。例えば、リンクの補完点の位置座標,海岸線,湖沼,河川形状などの水系データ,行政界位置データ,鉄道位置データ,施設等の位置・形状データ,地名等表示位置データ、などに関する情報が含まれる。
【0029】
表示部160は、地図表示部161と、表示装置162とから構成される。地図表示部161は、地図情報を表示用地図情報DB150から取得し、指定された縮尺,描画方式(平面図,鳥瞰図など)で、道路、その他の地図構成物や、出発地を示すマークを描画するよう、表示装置162に描画コマンドを送る。また、渋滞影響範囲算出部140において渋滞影響範囲と判定されたメッシュを、表示装置162を見たユーザが認識できるように、メッシュの外観を通常のメッシュの外観と異なって表示するよう(例えば、色を変化させるよう)、表示装置162に描画コマンドを送る。ここで、渋滞影響範囲と判定されたあるメッシュにおいて、メッシュが海,湖,山岳地帯などに含まれており、メッシュ内に含まれるリンクがない、あるいは非常に少ない場合、地図表示部161はそのメッシュの色を通常通り表示する描画コマンドを送るとしても良い。このとき、所定の閾値を定めておき、渋滞影響範囲算出部140において渋滞影響範囲と判定されたメッシュについて、メッシュ内に含まれるリンクの数が閾値以上の場合は渋滞影響範囲として表示し、メッシュ内に含まれるリンクの数が閾値未満の場合は渋滞影響範囲外として表示する。
【0030】
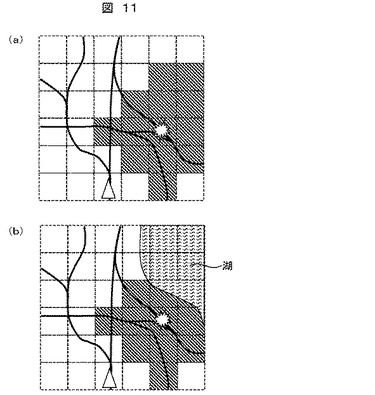
表示装置162は、CRTや液晶ディスプレイから構成され、地図表示部161から送信された描画命令を基に、地図画面の表示を行う。図11は、表示装置162における画面表示例を表している。表示装置162で、地図上に、出発地,道路,施設などとともに、渋滞影響範囲を表示することにより、将来に渡って出発地に影響を与える渋滞範囲を示すことができるため、ユーザが自らルートを変更することができる。
【0031】
以上で述べた交通情報システム110の構成により、未来の状況を予測し、影響を受ける渋滞範囲を求めることができる。よって、この範囲を回避することにより、将来に渡って確実な渋滞回避が実現できる。
【0032】
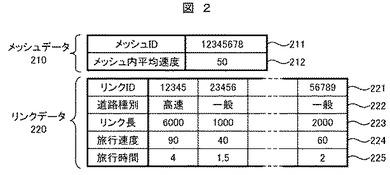
図3は、本発明の一実施形態が適用された交通情報システム110における全処理手順を示すフローチャートである。図3のフローチャートにおいて、交通情報システム110は、まず、現況交通情報および突発事象情報を、FM多重放送受信装置、ビーコン受信装置などから取得し、交通情報受信部131に取り込む(S40)。このステップは、一定周期ごと(例えば、5分ごと)に行われる。
【0033】
次に、現在位置取得部132が取得した位置情報、および、交通情報受信部131が受信した現況交通情報および突発事象情報から、渋滞判定部133では、影響を受ける可能性のある渋滞が発生しているか、あるいは、今後発生するかどうかの判定を行う(S41)。具体的には、出発地の現在位置から所定の距離内(例えば、50km以内)で突発事象が発生している、突発事象の発生時刻が所定の時間範囲内(例えば、現在から1時間前までの間)である、現況交通情報が所定の閾値を超えて急激に変化している(例えば、旅行速度が急激に減少している)、などの条件の中で少なくとも一つが満たされている場合、影響を受ける可能性のある渋滞が発生している、あるいは、今後発生すると判定する。この場合、前記現況交通情報および突発事象情報を渋滞到達時刻予測部134に送る(S41:Yes)。
【0034】
一方、出発地が影響を受ける可能性のある渋滞が発生していない、かつ、今後発生しないと判定される場合、交通情報システム110における処理は終了する(S41:No)。
【0035】
なお渋滞判定部133における判定で、交通情報受信部131が受信した突発事象の情報が、以前受信した突発事象によるものと同じか否かの判定も行い、以前受信した突発事象によるものと同じであると判定された場合には、交通情報システム110における処理を終了するようにしても良い。同じ突発事象であるか否かの判定は、例えば、突発事象の発生位置が同じ、かつ、突発事象の発生時刻が同じ、などの条件を満たすか否かにより行う。このようにすると、一つ突発事象に対して複数回予測処理を行うことを防ぐことができ、計算量の削減に繋がる。
【0036】
渋滞判定部133で条件を満たす突発事象が発生していると判定されると、渋滞到達時刻予測部134では、渋滞判定部133から送られた現況交通情報および突発事象情報に基づき、メッシュごとの渋滞開始時刻および渋滞解消時刻を算出する(S42)。そして、算出した渋滞開始時刻および渋滞解消時刻を、予測情報記憶部136に格納する。また到達時刻予測部135では、メッシュごとに出発地からの到達時刻を算出し、算出した出発地からの到達時刻を、予測情報記憶部136に格納する(S43)。次に、渋滞影響範囲算出部140では、メッシュごとの出発地からの到達時刻、渋滞開始時刻、渋滞解消時刻を予測情報記憶部136から読み取り、各メッシュが渋滞影響範囲に含まれるかどうかを判定する。そして、表示用地図情報DB150から出発地付近の地図情報を取得し、地図画面を表示するよう、地図表示部161から表示装置162に描画コマンドを送る(S44)。地図表示部161は、渋滞影響範囲算出部140から渋滞影響範囲に含まれると判定されたメッシュIDを受信し、そのメッシュの表示色を指定の色に変化させるよう、表示装置162にコマンドを送る。表示装置162は、そのコマンドを受け取り、出発地,道路,施設などとともに、地図上に渋滞影響範囲を表示する(S45)。
【0037】
図11は表示装置162の表示例を表したものである。図11(a)は、地図上において、出発地を三角形で表示し、突発事象発生位置を星型で表示し、主要道路を黒線で表示したものである。さらに、メッシュを点線で囲まれた正方形の格子で示し、渋滞影響範囲と判定されたメッシュに斜線を付して示している。
【0038】
このとき、海,湖など、道路がない地域、または、山岳地帯など、道路が少ない地域を考慮して、渋滞影響範囲を表示しても良い。図11(b)は、道路がない、あるいは、少ない地域を考慮した表示装置162の表示例を示している。ここで、湖の位置・形状データが表示用地図情報DBより得ることで、図11(b)に示すように、湖上であり、かつ渋滞影響範囲と判定された地域については、表示色の変更を行わないことにする。このような、表示色の変更を行うか否かの判定は、メッシュ内におけるリンクの本数,密度などを基に行っても良い。また、前記表示色の変更を行うかどうかの判定は、メッシュを何等分かした、各小領域について行っても良い。
【0039】
以上の処理を実行することにより、未来の渋滞状況を予測し、影響を受ける渋滞範囲を求めることができ、この渋滞範囲を回避することにより、将来に渡って確実な渋滞回避が実現できる。
【0040】
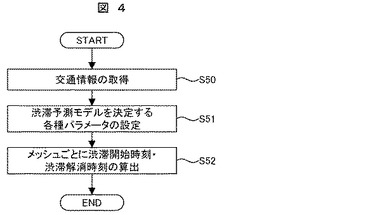
図4は、渋滞到達時刻予測部134におけるS42の処理を詳細に説明するフローチャートである。S50では、渋滞判定部133から現況交通情報および突発事象情報を取得する。次に、S51では、取得した現況交通情報および突発事象情報を用いて、渋滞伝播モデルを決定する各種パラメータを設定する。渋滞伝播モデルにおいて各種パラメータを設定することにより、将来の渋滞状況の予測が可能となる。
【0041】
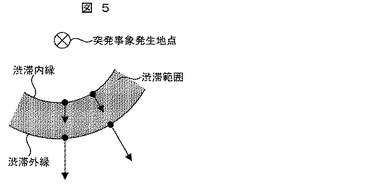
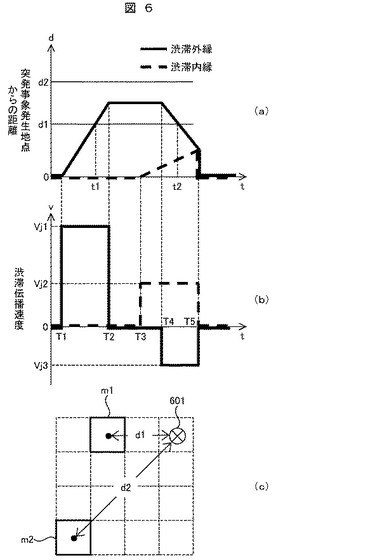
この渋滞伝播モデルの一例を、図5,図6を用いて説明する。この渋滞伝播モデルにおいては、渋滞範囲は突発事象の発生地点を中心としたドーナツ型の形状を保って伸縮すると仮定し、渋滞範囲の外縁と内縁の位置が変化する。図6(a)は、渋滞外縁と渋滞内縁の、突発事象発生位置からの距離の時間変化を表したグラフである。図6(a)において、横軸は時刻を表し、縦軸は突発事象発生位置からの距離を表している。また、図6(b)は、渋滞外縁および渋滞内縁の変位速度の時間変化を表したグラフである。図6(b)において、横軸は時刻を表し、縦軸は渋滞外縁および渋滞内縁の変位速度を表している。このとき、突発事象発生位置から外側に向かう方向を正の値としている。
【0042】
図6(a),(b)に示す渋滞伝播モデルにおいては、渋滞は時刻T1に発生し、時刻T5に解消している。渋滞外縁は、時刻T1〜T2間において一定速度Vj1(≧0)で外側に広がっていき、時刻T2〜T4間においては変化が無く、時刻T4〜T5間において一定速度Vj3(≦0)で内側に縮んでいく。一方、渋滞内縁は、時刻T1〜T3間はまだ存在せず、時刻T3〜T5において一定速度Vj2(≧0)で外側に広がっていく。
【0043】
S51は、現況交通情報および突発事象情報を用いて、図6(a)のT1,T2,T3,T4,T5,Vj1,Vj2,Vj3の各種パラメータを設定する。このため例えば、規制内容(通行止め,片側規制など),原因事象(事故,工事など),規制対象リンクの道路種別,規制の位置,規制の開始時刻などにより表される全ての状況に対し、それぞれ対応する各種パラメータの値を事前に定めておく。このとき、各種パラメータの値は、同様の状況の下で起きた過去の突発渋滞の情報から統計的に求めた値を用いても良い。また、前記各種パラメータは、一つの突発渋滞に対して一律に設定しても良いし、突発事象発生位置を中心にした一定角度ごとの範囲において、それぞれ設定しても良い。
【0044】
そしてS52では、S51で設定した各種パラメータに基づく渋滞伝播モデルと、基本地図情報DB120から取得した基本地図情報を用いて、メッシュごとに渋滞開始時刻および渋滞解消時刻を算出する。このとき、渋滞開始時刻および渋滞解消時刻の算出を行うメッシュは、例えば、突発事象発生位置と当該メッシュの代表点(例えば、メッシュの中心点)との距離が所定の範囲内(例えば、100km以内)という条件を満たすメッシュとして選ばれる。算出された渋滞開始時刻および渋滞解消時刻は、予測情報記憶部136に格納される。
【0045】
具体的なメッシュにおける渋滞開始時刻および渋滞解消時刻の算出処理について説明する。図6(c)は、地図上におけるメッシュを正方形の格子で表している。まず、突発事象発生位置601と、各メッシュの代表点(例えば、メッシュの中心点)との距離を算出する。図6(c)では、突発事象発生位置601とメッシュm1との距離はd1、メッシュm2との距離はd2となっている。
【0046】
次に、図6(a)における、渋滞外縁および渋滞内縁の位置変化を、それぞれ(式1)(式2)により表す。
d=f(t) …(式1)
d=g(t) …(式2)
【0047】
ここで、dは突発事象発生位置からの距離を表し、tは時刻を表す。これより、時刻tにおける渋滞の範囲は、以下の(式3)を満たす範囲だといえる。
g(t)≦d≦f(t) …(式3)
【0048】
また、正の微小時間Δtを設定する。例えば、Δt=5minとする。このとき、突発事象発生位置601から、距離dの位置にあるメッシュの渋滞開始時刻は、以下の条件1,条件2を満たす時刻tとして求められる。
条件1:g(t)=dあるいはf(t)=dを満たす
条件2:g(t+Δt)≦d≦f(t+Δt)を満たす
【0049】
また、メッシュの渋滞解消時刻は、以下の条件3,条件4を満たす時刻tとして求められる。
条件3:g(t)=dあるいはf(t)=dを満たす
条件4:g(t−Δt)≦d≦f(t−Δt)を満たす
【0050】
図6(c)の例において、メッシュm1については、条件1〜条件4に、d=d1を代入することにより、メッシュm1における渋滞開始時刻がt1、渋滞解消時刻がt2と求められる。一方、メッシュm2については、条件1〜条件4に、d=d2を代入しても、条件を満たす時刻tが存在せず、渋滞開始時刻も渋滞解消時刻も算出されない。このように、渋滞開始時刻と渋滞解消時刻が算出されない場合は、そのメッシュまで渋滞範囲が伝播しないことを表しており、予測情報記憶部136の該当領域は“データなし”となる。
【0051】
以上の処理により、各メッシュにおける渋滞開始時刻,渋滞解消時刻が算出される。
【0052】
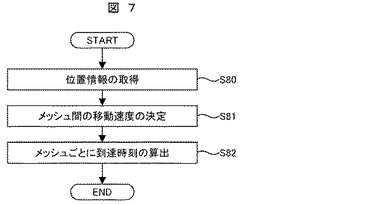
次に到達時刻予測部135におけるS43の処理の詳細を、図7,図8を用いて説明する。図7は、到達時刻予測部135における処理のフローチャートを示している。図7において、まず、現在位置取得部132が車速センサ,ジャイロセンサ,GPS受信装置などから受信した情報を基に算出した現在位置を取得する(S80)。次に、メッシュ間の移動速度を設定する(S81)。この移動速度は、基本地図情報DB120のメッシュデータに含まれるメッシュ内平均速度212を用いる。メッシュ内平均速度212が無い場合は、事前に渋滞到達時刻予測部134において予測された渋滞状況を基に、渋滞範囲に含まれるリンクの旅行速度を変更してから、メッシュごとに平均を求めてメッシュ間の移動速度を算出しても良い。そして、設定したメッシュ間の移動速度と、基本地図情報DB120から取得した基本地図情報を用いて、メッシュごとに出発地からの到達時刻を算出する(S82)。
【0053】
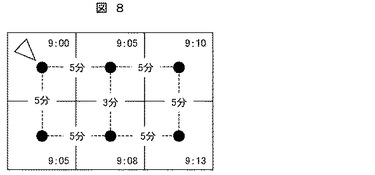
メッシュごとの到達時刻算出の具体的な処理について、図8を用いて説明する。各メッシュについて、一つの代表点(例えば、メッシュの中心点)を設定し、その代表点間の距離をメッシュ間の距離とする。メッシュ間距離をメッシュ内平均速度212で除することにより、メッシュ間の平均移動時間が求められる。図8は、各メッシュを正方形の格子で表し、各メッシュの代表点を黒丸で表し、その上に各メッシュ間の移動時間を記入したものである。そして、出発地をスタートノード、各メッシュの代表点をノードとし、メッシュの代表点間にメッシュ間の平均移動時間をリンクコストとしたリンクがあると見なしてダイクストラ法を適用することにより、出発地から各メッシュの代表点に到達するまでに必要となる最小所要時間を求めることができる。そこで、メッシュごとに求められた最小所要時間を現在時刻に加算することにより、各メッシュへの到達時刻を算出することができる。またこのとき、到達時刻の算出を行うメッシュは、例えば、出発地とメッシュの代表点(例えば、メッシュの中心点)との距離が所定の範囲内(例えば、100km以内)という条件を満たすメッシュとして選ばれる。
【0054】
図8は、図中左上のメッシュを出発地とし、出発時刻が9:00とした場合の、各メッシュへの到達時刻を、メッシュ上に記入したものである。
【0055】
以上の処理により、各メッシュにおける出発地からの到達時刻が算出される。
【0056】
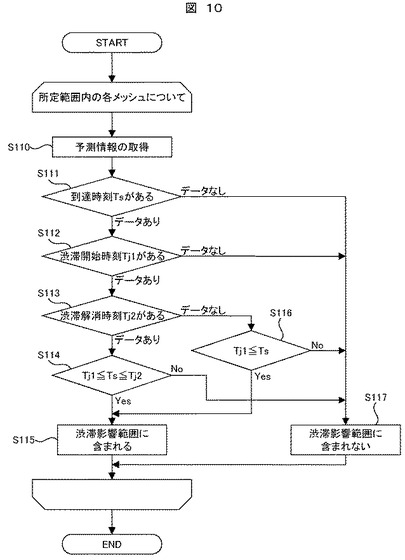
次に渋滞影響範囲算出部140におけるS44の処理の詳細を、図10を用いて説明する。この処理は、ある領域内に含まれる各メッシュについて行われる。各領域は、例えば、出発地と当該メッシュの代表点(例えば、メッシュの中心点)との距離が所定の範囲内(例えば、100km以内)という条件を満たすメッシュとして選ばれる。
【0057】
まず、渋滞影響範囲算出部140は、あるメッシュの出発地からの到達時刻,渋滞開始時刻,渋滞解消時刻を、予測情報記憶部136から読み取る(S110)。ここで、メッシュごとの到達時刻をTs、渋滞開始時刻をTj1、渋滞解消時刻をTj2とする。図9に、予測情報記憶部136に格納される、メッシュごとの出発地からの到達時刻,渋滞開始時刻,渋滞解消時刻のフォーマットの一例を示す。予測情報記憶部136には、出発地に対応したメッシュに対して所定範囲内の各メッシュについて図9に示すフォーマットのデータが格納されているものとする。
【0058】
そして、処理対象としているメッシュについて予測情報記憶部136から読み出したデータに、到達時刻Tsのデータが存在するかどうかを判定する(S111)。データがない場合は(S111:データなし)、該当メッシュは渋滞影響範囲に含まれない、と判定される(S117)。これは、図9において、メッシュIDが“45678901”のデータ例に示される状態である。
【0059】
またTsのデータがある場合は(S111:データあり)、次に、該当メッシュにおける渋滞開始時刻Tj1のデータが存在するかどうかを判定する(S112)。データがない場合は(S112:データなし)、該当メッシュは渋滞影響範囲に含まれない、と判定される(S117)。これは、図9において、メッシュIDが“34567890”のデータ例に示される状態である。
【0060】
Tj1のデータがある場合は(S112:データあり)、次に、該当メッシュにおける渋滞開始時刻Tj2のデータが存在するかどうかを判定する(S113)。データがない場合は(S113:データなし)、S116において、以下の(式4)を満たすかどうかの判定が行われる。数式(4)を満たす場合(S116:Yes)、そのメッシュは渋滞影響範囲に含まれると判定され、(式4)を満たさない場合は(S116:No)、渋滞影響範囲に含まれないと判定される(S117)。
Tj1≦Ts …(式4)
【0061】
これは、図9において、メッシュIDが“23456789”のデータ例に示される状態である。この例では、Ts=9:10,Tj1=9:05で、(式1)を満たすため、該当メッシュは渋滞影響範囲に含まれる、と判定される(S115)。
【0062】
最後に、Tj2がある場合は(S113:データあり)、S115において、以下の(式5)を満たすかどうかの判定が行われる。(式5)を満たす場合(S115:Yes)、そのメッシュは渋滞影響範囲に含まれると判定され(S115)、(式5)を満たさない場合は(S116:No)、渋滞影響範囲に含まれないと判定される(S117)。
Tj1≦Ts≦Tj2 …(式5)
【0063】
これは、図9において、メッシュIDが“12345678”の例に示される状態である。この例では、Ts=9:00,Tj1=9:10,Tj2=9:30で、数式(2)を満たさないため、当該メッシュは渋滞影響範囲に含まれない、と判定される。
【0064】
以上の処理を所定範囲内のメッシュについて、各々行う。以上の処理より、各メッシュについて渋滞影響範囲に含まれるか否かが判定される。そしてこのように、渋滞影響範囲算出部140において、メッシュごとに渋滞影響範囲に含まれるか否かを判定するものとしたことにより、計算量が削減され、処理時間が短くなる。
【0065】
また、メッシュ単位に渋滞影響範囲を判定するのではなく、リンクごとに渋滞影響範囲に含まれるか否かを判定しても良い。このとき、渋滞到達時刻予測部134および到達時刻予測部135のうち、少なくともどちらか一つにおいて、リンクごとに到達時刻の算出を行う。S42における処理で、渋滞到達時刻予測部134においてリンクごとに渋滞開始時刻および渋滞解消時刻の算出を行う場合、図6で説明をした処理では、突発事象発生位置とメッシュの代表点間の距離を用いたところを、突発事象発生位置とリンクの代表点(例えば、リンクの中間点)間の距離を用いることにする。一方、S43における処理でリンクごとに到達時刻の算出を行う場合、図8を用いて説明したメッシュ単位の到達時刻の計算処理の代わりに、通常のリンク単位のダイクストラ法を用いて、各リンクまでの所要時間を算出することにする。そして、リンクごとに渋滞影響範囲に含まれるか否かを判定する場合は、予測情報記憶部136には、メッシュIDの代わりにリンクIDが格納され、一つのリンクIDにつき、出発地からの到達時刻,渋滞開始時刻,渋滞解消時刻が一つずつ記録される。
【0066】
以上のように、リンクごとに渋滞影響範囲に含まれるか否かの判定を行う場合、メッシュ単位で予測する場合と比較して、より正確な渋滞影響範囲算出が実現できる。
【0067】
また、一つの突発事象に対して、複数回,予測処理を行っても良い。こうすることで、さらに予測の正確さを増し、適切な渋滞影響範囲を算出することができる。この場合、S42およびS43の処理では、前回算出した自車到達時刻,渋滞開始時刻,渋滞解消時刻を記憶しておくことにする。そして、S42およびS43において、各メッシュにおける出発地からの到達時刻,渋滞開始時刻,渋滞解消時刻を算出した際、前回の算出結果と比較し、差が所定の閾値を越えた場合、S44の処理を行うとしても良い。こうすることで、同じ突発事象に関して前回の予測結果と現況の交通状況の乖離が拡大した場合のみ、渋滞影響範囲の算出を繰り返すため、交通情報を受信するたびに全ステップを繰り返す場合と比較して、計算量を削減することができる。
【実施例2】
【0068】
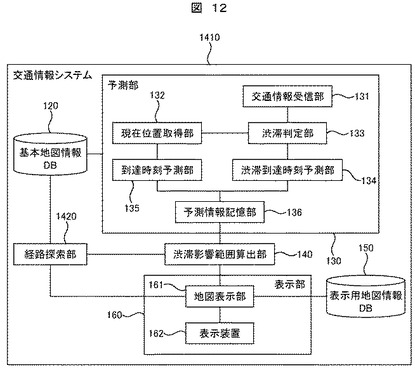
図12は、図1に示した交通情報システム110に、出発地と目的地間を結ぶ経路を探索する経路探索の機能を持つ経路探索部1420を追加した交通情報システム1410の構成図である。
【0069】
図13は、交通情報システム1410における処理手順を示すフローチャートである。図3に示したフローチャートの各ステップと同様の処理を行うステップについては、同じ略号を用いて示している。図3に示される実施例1の処理手順と比較した場合、本実施例においては、経路探索部1420における経路探索処理(S150)が加わっている。このS150では、出発地から目的地に向かう最短時間経路を、ダイクストラ法などを用いて探索する。このとき、リンクコストは、基本地図情報DB120に含まれる、リンクごとの旅行時間225を用いて設定される。また、基本地図情報DB120に含まれる統計交通情報を用いて、リンクコストを設定しても良い。さらに、交通情報受信部131から取得される現況交通情報を用いて、リンクコストを設定しても良い。
【0070】
経路探索部1420は、S44において渋滞影響範囲に含まれると判定されたメッシュのメッシュIDを、渋滞影響範囲算出部140から取得し、渋滞影響範囲に含まれると判定されたメッシュに含まれるリンクについて、リンクコストを再設定する。リンクコストの再設定においては、例えば、渋滞影響範囲内の平均速度を一律に設定し(例えば、5km/h)、各リンクにおいて、リンク長223を渋滞影響範囲内の平均速度で除して、リンクコストとする。あるいは、リンクコストは渋滞の端部に近づくほど小さく、渋滞の中央部に近づくほど大きく設定しても良い。これは、渋滞予測結果の信頼度が、渋滞の端部では低く、渋滞の中央では高いためである。
【0071】
具体的なリンクコストの算出法としては、例えば、以下のような方法がある。突発事象発生位置からの距離をdと表し、突発事象発生位置から渋滞内縁までの距離をdi、突発事象発生位置から渋滞外縁までの距離をdoとおくと、渋滞の中央部は突発事象発生位置からdm=(di+do)/2の距離にあるといえる。さらに、通常時のリンクコスト、および前記滞影響範囲内の平均速度を一律に設定して求めたリンクコストを、それぞれdを用いた関数C1(d),C2(d)と表す。このとき、突発事象発生位置からの距離dによるリンクコストC(d)を以下の(式6)から求める。ここで、N(μ,σ2)は、平均μ,分散σ2の正規分布を表す。
C(d)={1+N(C2(dm)/C1(dm),(do−di)/2)}×C1(d)
(di≦d≦doの場合) …(式6)
C(d)=C1(d) (d≦di、またはd≧doの場合)
【0072】
これにより、予測の信頼度が高い渋滞中央部は、確実に回避する一方、予測の信頼度が低い渋滞端部において、交通状況と出発地および目的地の位置関係によっては、渋滞端部を通過する経路が選択されることもあり得る。すなわち、より交通状況に即した適切な経路探索を行うことができる。
【0073】
続くS45においては、実施例1と同様に、地図表示部161は、渋滞影響範囲内と判定されたメッシュの色を変化させて表示するよう、表示装置162にコマンドを送る。このとき、表示装置162は、経路探索部1420から取得した経路情報を基に、再探索後の推奨経路を表示しても良い。
【0074】
なお、図4のS52において、渋滞到達時刻を算出するメッシュを決定する際に、目的地および出発地を含む所定領域に、メッシュの代表点が含まれることを条件としても良い。この所定領域としては、例えば、出発地と目的地を2焦点とする楕円型の内部に含まれる領域として良い。そして、図7のS82における、出発地からの到達時刻を算出するメッシュや、図3のS44における渋滞影響範囲の判定を行うメッシュについても、目的地および出発地を含む所定領域に、メッシュの代表点が含まれる場合も同様の処理を行う、として良い。
【0075】
以上のように、出発地と目的地を含む所定領域に含まれるメッシュについてのみ処理を行うとした場合、この後通過する可能性の高いメッシュについてのみ各処理を行うことになり、効率的な処理が可能となる。
【実施例3】
【0076】
実施例1および実施例2においては、道路種別を考慮せずに渋滞影響範囲の算出を行ったが、本実施例においては、道路種別を考慮した渋滞影響範囲算出について説明する。この場合の、実施例1および実施例2の構成との相違点は、基本地図情報DB120,渋滞到達時刻予測部134,到達時刻予測部135,予測情報記憶部136,地図表示部161における処理である。
【0077】
以下、実施例1および実施例2との相違点であるこれら各処理について説明する。まず、メッシュごとに渋滞影響範囲の算出を行う場合、基本地図情報DB120においては、各道路種別ごとに算出されたメッシュ内平均速度212を格納しておく。
【0078】
S172は、渋滞到達時刻算出処理で必要となる渋滞伝播モデルの各種パラメータ(図5参照)を、各道路種別ごとに求めておく。
【0079】
その上で、S42では、渋滞開始時刻および渋滞解消時刻の算出を、道路種別ごとに行う。同様に、S43は、到達時刻の算出を、道路種別ごとに行う。S42およびS43で算出した到達時刻,渋滞開始時刻,渋滞解消時刻は、予測情報記憶部136に格納される。図14は、本実施例における予測情報記憶部136に格納されるメッシュごとの出発地からの到達時刻,渋滞開始時刻,渋滞解消時刻のフォーマットを示しており、各メッシュについて道路種別ごとに、自車到達時刻,渋滞開始時刻,渋滞解消時刻が格納される。
【0080】
ここで、ある突発事象が発生した場合、発生地点のリンクの道路種別と同じ道路種別のリンクに沿って渋滞が伝播していくものとして渋滞開始時刻および渋滞解消時刻の算出が行われる。例えば、高速道路上で発生した突発事象による渋滞は、地図上での距離は近いが、道路種別の異なる一般道路には伝播しないといえる。そして突発渋滞は高速道路上で発生した突発事象を原因とする場合、一般道路上には直接渋滞範囲が伝播しないため、S45では地図上において、高速道路上における渋滞範囲に色を付け、突発渋滞の伝播の様子を表示することになる。
【0081】
あるいは、異なる道路種別間でも渋滞が伝播するとしても良い。このとき、異なる種別の道路の接続地点で新たな突発事象が発生したとみなし、渋滞伝播の予測を行う。例えば、高速道路上で発生した突発事象による渋滞が、インターチェンジから一般道路に伝播する状況が考えられる。このとき、インターチェンジを新たな突発事象発生点とおいて、一般道路上での渋滞伝播を予測する。この場合は、突発渋滞は高速道路上で発生した突発事象を原因としているが、S45では地図上において、インターチェンジを突発事象発生位置とした場合のと同様の一般道上における突発渋滞の伝播の様子を表示する。
【0082】
S44では、渋滞影響範囲算出部140の処理として、予測情報記憶部136から、各メッシュの道路種別ごとの、出発地からの到達時刻,渋滞開始時刻,渋滞解消時刻を読み取り、道路種別ごとの渋滞影響範囲の算出を行う。図14の例では、メッシュIDが“12345678”のメッシュにおいて、高速道路では(式1)が満たされるため、渋滞影響範囲に含まれると判定される。一方、一般道路では、渋滞開始時刻および渋滞解消時刻のデータが両方ないため、渋滞影響範囲に含まれないと判定される。
【0083】
地図表示部161においては、ユーザが各道路種別における渋滞影響範囲を把握できるような表示を行うよう、描画コマンドを表示装置162に送る。例えば、高速道路のリンクと一般道路のリンクが同一メッシュ内にあり、高速道路上のみで渋滞が発生する場合、前述のように高速道路の色のみを変えて表示し、一般道路の色は通常通りに表示するような描画コマンドを送る。
【符号の説明】
【0084】
110,1410 交通情報システム
120 基本地図情報DB
130 予測部
131 交通情報受信部
132 現在位置取得部
133 渋滞判定部
134 渋滞到達時刻予測部
135 到達時刻予測部
136 予測情報記憶部
140 渋滞影響範囲算出部
150 表示用地図情報DB
160 表示部
161 地図表示部
162 表示装置
1420 経路探索部
【技術分野】
【0001】
本発明は、ナビゲーションシステムに関わり、特に渋滞の範囲を算出し、その範囲を回避する経路を提供するシステムに関する。
【背景技術】
【0002】
近年、ナビゲーションシステムを用いて現在地から目的地までの経路を誘導する際、最短時間,最短距離,一般道優先などの条件をユーザが選択することにより、ユーザにとって最適な経路を探索し、誘導・案内する技術が普及している。ユーザが最短時間経路を選択した場合、カーナビゲーション装置は現況交通情報および統計交通情報を用いて目的地までの所要時間が最短となる経路を探索する。しかし、突発事象を原因とする突発渋滞は、現況交通情報および統計交通情報を用いて、事前に予測し、回避することが困難である。そのため、そのような渋滞が発生した場合、渋滞に巻き込まれて、目的地に到達するのに予測した以上に時間がかかるという問題が生じた。そこで、渋滞が発生した場合、再度、経路探索を行い、渋滞を回避することにより、渋滞による時間のロスを最低限にとどめようとする技術が開発されてきた。
【0003】
例えば、特開2007−285998号公報に示されるように、最短時間経路上に発生している渋滞箇所に自車が到達する頃の渋滞区間を予測し、予測した渋滞区間の手前にある交差点で、利用者の所望の条件を満たす交差点から迂回を開始して前記予測した渋滞区間を回避する技術が存在する。
【0004】
また、特開2008−268149号公報に示されるように、事故の発生時刻からの経過時間に応じて回避すべき領域の面積を算出し、その領域を回避するよう経路探索を行う技術が存在する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−285998号公報
【特許文献2】特開2008−268149号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に示される技術を突発渋滞に対して用いた場合、現在、誘導・案内を行っている最短時間経路上の突発渋滞の伸縮を予測し回避することはできるが、迂回した後の経路上で当該突発渋滞に起因する渋滞に遭遇するか否かについては予測できない。そのため、突発渋滞を確実に回避するためには、迂回した後の経路上の突発渋滞についても予測を行い、もし、迂回した後の経路上に存在する突発渋滞に自車が遭遇する場合は、再び迂回を行わなければならない。
【0007】
また、特許文献2に示される技術を突発渋滞に対して用いた場合、現在の突発渋滞範囲を回避する経路を探索することができるが、回避した後の経路が、その後拡大した突発渋滞範囲に含まれるか否かについては予測できない。そのため、突発渋滞を確実に回避するためには、再探索処理を繰り返し行う必要がある。
【0008】
すなわち、これら従来技術を用いた場合、確実に突発渋滞を回避するためには、再探索処理を繰り返し行う必要があり、経路探索の回数が増えるとともに、計算量も増加する。この場合、推奨経路が頻繁に変わる可能性があるため、利用者にとっては非常に不便となる。さらに、将来の状況を考慮せずに経路設定を行うため、渋滞を回避できない状況に陥る可能性も大きくなる。
【0009】
そこで本発明は、突発事象による渋滞が発生した場合でも、時間の変化に伴う突発事象の影響範囲の変化を考慮して、予め渋滞の影響範囲を予測しておくことにより、経路の再探索を繰り返すことなく、確実に渋滞範囲を回避する経路を提示することを目的とする。
【課題を解決するための手段】
【0010】
上記の課題を解決すべく、本発明は、突発事象の情報を含む交通情報を取得する交通情報取得ステップと、突発事象による渋滞の開始時刻,解消時刻の少なくとも一方をメッシュごとに予測する渋滞到達時刻予測ステップと、出発位置および出発時刻に基づき出発位置周辺のメッシュごとに出発地からの到達時刻を予測する到達時刻予測ステップと、今後影響を受ける渋滞の範囲を算出する渋滞影響範囲算出ステップと、を実行することを特徴とする。
【0011】
また、地図上に渋滞影響範囲を重畳表示する表示ステップと、求めた渋滞影響範囲に含まれるリンクのリンクコストが大きくなるように再設定した上で経路探索を行う経路探索ステップと、を実行することを特徴とする。
【発明の効果】
【0012】
本発明によれば、将来渋滞に遭遇する可能性のある領域として渋滞影響範囲を設定するため、渋滞影響範囲を回避するように経路を設定することで、将来に渡って渋滞の進展範囲を確実に渋滞を回避することができ、経路再探索回数を削減することができる。
【図面の簡単な説明】
【0013】
【図1】本発明を用いた交通情報システムの構成図である。
【図2】地図情報の構成例を示す図である。
【図3】本発明を用いた交通情報システムの処理を表すフローチャートである。
【図4】渋滞到達時刻予測処理のフローチャートである。
【図5】渋滞伝播モデルを説明する図である。
【図6】渋滞伝播モデルにおける渋滞開始時刻・渋滞解消時刻を示す図である。
【図7】出発地からの到達時刻予測処理のフローチャートである。
【図8】到達時刻予測処理におけるメッシュ単位のダイクストラ法を説明する図である。
【図9】予測情報記憶部に格納されるデータの構成例を示す図である。
【図10】渋滞影響範囲算出処理のフローチャートである。
【図11】渋滞影響範囲の画面表示例を示す図である。
【図12】本発明を用いた交通情報システムの他の構成図である。
【図13】本発明を用いた交通情報システムの処理を表す他のフローチャートである。
【図14】予測情報記憶部に格納されるデータの構成例を示す図である。
【発明を実施するための形態】
【0014】
本発明の実施形態について、図面を参照して説明する。
【実施例1】
【0015】
図1は、本発明を用いた交通情報システム110の構成図である。交通情報システム110は、基本地図情報DB120,予測部130,渋滞影響範囲算出部140,表示用地図情報DB150,表示部160とから構成される。
【0016】
図2は、基本地図情報DB120のデータ構成を示している。基本地図情報DB120は、メッシュについての情報を表すメッシュデータ210と、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ220と、を含み、メッシュごとに格納している。メッシュは、緯度経度に基づいて設定された地図の矩形領域(例えば、緯度差40分,経度差1度の領域)を表す。メッシュの大きさは、ユーザの求める渋滞範囲の分解能,道路の構成などによって、適宜設定して良い。リンクは、道路を構成する要素であり、交差点や分岐などに指定されるノード間を結んだベクトルとして表される。このとき、同じ道路の上り方向と下り方向とは、それぞれ別のリンクとして管理される。
【0017】
メッシュデータ210は、メッシュID211と、メッシュ内平均速度212を含んでいる。メッシュID211は、各メッシュの識別コードを表し、メッシュの地図上の位置に応じて規則的に与えられており、あるメッシュのメッシュID211から隣接するメッシュのメッシュIDを求めることができる。メッシュ内平均速度212は、メッシュ内に含まれるリンクについて、後記する旅行速度224を平均した値が格納される。
【0018】
リンクデータ220は、各リンクの識別コードを表すリンクID221と、高速道路,一般国道などに分類される道路種別222と、リンクの長さを示すリンク長223と、リンクを通過する際の平均速度を表す旅行速度224と、リンクを通過する際に要する所要時間を表す旅行時間225とから構成される。
【0019】
旅行速度224には、各リンクの規制速度が格納される。また、旅行速度224は、予測対象日の日種(曜日,平日/土曜/休日,五十日,天気等)に対応して作成された統計交通情報であっても良い。この場合、予測対象日の日種に該当する過去の日が複数日あったとして、それらの同一時間帯に関するリンク旅行速度の平均値や中央値等の統計値が、リンクの統計旅行速度に該当する。統計交通情報を用いる場合、リンク一つに対し、各日種における各時間帯の交通情報が格納される。旅行時間225は、リンク長223を旅行速度224で除した値であっても良い。
【0020】
予測部130は、交通情報受信部131と、現在位置取得部132と、渋滞判定部133と、渋滞到達時刻予測部134と、到達時刻予測部135と、予測情報記憶部136とから構成される。
【0021】
交通情報受信部131は、FM多重放送受信装置,ビーコン受信装置,携帯電話,無線装置などから現況交通情報および突発事象情報を受信し、渋滞判定部に送る。現況交通情報には、リンクごとの旅行時間,渋滞度などが含まれる。突発事象情報には、規制内容(通行止め,片側規制など),原因事象(事故,工事など),規制対象リンクの道路種別,規制の位置,規制の開始時刻などについての情報が含まれる。FM多重放送受信装置は、FM放送局がFM多重放送信号として送信する概略交通情報(図形など)および文字情報などを受信する。概略交通情報および文字情報は、交通情報センタからFM放送局へ送信された現況交通情報に基づいて作成される。ビーコン受信装置は、交通管制センタが路上の通信装置であるビーコンを介して送信する詳細な現況交通情報を受信する。現況交通情報は、交通情報センタから各地域の交通管制センタへ送信されたものである。ここで、FM多重放送受信装置やビーコン受信装置は、プローブカーから送られてくる車両情報(時刻,走行速度,走行位置の情報など)を走行位置に対応するリンクに関係付けた情報を、現況情報として受信しても良い。
【0022】
現在位置取得部132は、出発地の位置を算出し、また、現在時刻を取得する。このとき、例えば、車速センサ,ジャイロセンサ,GPS受信装置などのうち少なくとも一つから取得した情報に基づき、位置の算出を行う。前記車速センサは、車輪の円周と計測される車輪の回転数の積から走行距離を測定し、さらに対となる車輪の回転数の差から曲がった角度を計測する。前記ジャイロセンサは、光ファイバファイロや振動ジャイロ等で構成され、センサが取り付けられた車両の回転した角度を検出する。ここで出発地とは、交通情報システム110が車載装置に備えられる場合は自車位置とする。また、車載装置と異なる装置、例えば、交通情報センタに交通情報システム110が備えられる場合には、出発地とはユーザが指定した地点、あるいは、車載端末から送られた自車位置とする。
【0023】
渋滞判定部133は、現在位置取得部132から取得した位置情報を考慮し、交通情報受信部131が受信した現況交通情報および突発事象情報から、影響を受ける可能性のある渋滞が発生しているか、あるいは、今後発生するか否かを判定する。具体的には、出発地から所定の距離内(例えば、50km以内)で突発事象が発生している、突発事象の発生時刻が所定の時間範囲内(例えば、現在から1時間前までの間)である、現況交通情報が所定の閾値を超えて急激に変化している(例えば、旅行速度が急激に減少している)、などの条件の中で少なくとも一つが満たされている場合、影響を受ける可能性のある渋滞が発生している、あるいは今後発生すると判定する。影響を受ける可能性のある渋滞が発生している、あるいは今後発生すると判定した場合、現況交通情報および突発事象情報を渋滞到達時刻予測部に送る。
【0024】
渋滞到達時刻予測部134は、渋滞判定部133から取得した現況交通情報と突発事象情報、および基本地図情報DB120から取得した基本地図情報から、突発事象発生位置周辺のメッシュについて、メッシュごとに渋滞開始時刻および渋滞解消時刻を算出する。また、メッシュごとに算出した渋滞開始時刻および渋滞解消時刻を、予測情報記憶部136に送る。
【0025】
到達時刻予測部135は、現在位置取得部132から取得した出発地の位置情報および基本地図情報DB120から取得した基本地図情報に基づき、出発地周辺のメッシュについて、メッシュごとの出発地からの到達時刻を算出する。また、メッシュごとに算出した出発地からの到達時刻を、予測情報記憶部136に送る。
【0026】
予測情報記憶部136は、渋滞到達時刻予測部134および到達時刻予測部135から送られた、メッシュごとの到達時刻,渋滞開始時刻,渋滞解消時刻を格納する。予測情報記憶部136に格納される予測情報の構成の一例を図9に示す。一つのメッシュIDにつき、到達時刻,渋滞開始時刻,渋滞解消時刻が一つずつ記録される。
【0027】
渋滞影響範囲算出部140は、予測情報記憶部136から、メッシュごとの到達時刻,渋滞開始時刻,渋滞解消時刻を読み取り、各メッシュが渋滞影響範囲に含まれるか否かを判定する。また、その結果を表示部160に送信する。
【0028】
表示用地図情報DB150には、地図表示を行う際に必要となる、道路や、その他構成物の情報が含まれている。例えば、リンクの補完点の位置座標,海岸線,湖沼,河川形状などの水系データ,行政界位置データ,鉄道位置データ,施設等の位置・形状データ,地名等表示位置データ、などに関する情報が含まれる。
【0029】
表示部160は、地図表示部161と、表示装置162とから構成される。地図表示部161は、地図情報を表示用地図情報DB150から取得し、指定された縮尺,描画方式(平面図,鳥瞰図など)で、道路、その他の地図構成物や、出発地を示すマークを描画するよう、表示装置162に描画コマンドを送る。また、渋滞影響範囲算出部140において渋滞影響範囲と判定されたメッシュを、表示装置162を見たユーザが認識できるように、メッシュの外観を通常のメッシュの外観と異なって表示するよう(例えば、色を変化させるよう)、表示装置162に描画コマンドを送る。ここで、渋滞影響範囲と判定されたあるメッシュにおいて、メッシュが海,湖,山岳地帯などに含まれており、メッシュ内に含まれるリンクがない、あるいは非常に少ない場合、地図表示部161はそのメッシュの色を通常通り表示する描画コマンドを送るとしても良い。このとき、所定の閾値を定めておき、渋滞影響範囲算出部140において渋滞影響範囲と判定されたメッシュについて、メッシュ内に含まれるリンクの数が閾値以上の場合は渋滞影響範囲として表示し、メッシュ内に含まれるリンクの数が閾値未満の場合は渋滞影響範囲外として表示する。
【0030】
表示装置162は、CRTや液晶ディスプレイから構成され、地図表示部161から送信された描画命令を基に、地図画面の表示を行う。図11は、表示装置162における画面表示例を表している。表示装置162で、地図上に、出発地,道路,施設などとともに、渋滞影響範囲を表示することにより、将来に渡って出発地に影響を与える渋滞範囲を示すことができるため、ユーザが自らルートを変更することができる。
【0031】
以上で述べた交通情報システム110の構成により、未来の状況を予測し、影響を受ける渋滞範囲を求めることができる。よって、この範囲を回避することにより、将来に渡って確実な渋滞回避が実現できる。
【0032】
図3は、本発明の一実施形態が適用された交通情報システム110における全処理手順を示すフローチャートである。図3のフローチャートにおいて、交通情報システム110は、まず、現況交通情報および突発事象情報を、FM多重放送受信装置、ビーコン受信装置などから取得し、交通情報受信部131に取り込む(S40)。このステップは、一定周期ごと(例えば、5分ごと)に行われる。
【0033】
次に、現在位置取得部132が取得した位置情報、および、交通情報受信部131が受信した現況交通情報および突発事象情報から、渋滞判定部133では、影響を受ける可能性のある渋滞が発生しているか、あるいは、今後発生するかどうかの判定を行う(S41)。具体的には、出発地の現在位置から所定の距離内(例えば、50km以内)で突発事象が発生している、突発事象の発生時刻が所定の時間範囲内(例えば、現在から1時間前までの間)である、現況交通情報が所定の閾値を超えて急激に変化している(例えば、旅行速度が急激に減少している)、などの条件の中で少なくとも一つが満たされている場合、影響を受ける可能性のある渋滞が発生している、あるいは、今後発生すると判定する。この場合、前記現況交通情報および突発事象情報を渋滞到達時刻予測部134に送る(S41:Yes)。
【0034】
一方、出発地が影響を受ける可能性のある渋滞が発生していない、かつ、今後発生しないと判定される場合、交通情報システム110における処理は終了する(S41:No)。
【0035】
なお渋滞判定部133における判定で、交通情報受信部131が受信した突発事象の情報が、以前受信した突発事象によるものと同じか否かの判定も行い、以前受信した突発事象によるものと同じであると判定された場合には、交通情報システム110における処理を終了するようにしても良い。同じ突発事象であるか否かの判定は、例えば、突発事象の発生位置が同じ、かつ、突発事象の発生時刻が同じ、などの条件を満たすか否かにより行う。このようにすると、一つ突発事象に対して複数回予測処理を行うことを防ぐことができ、計算量の削減に繋がる。
【0036】
渋滞判定部133で条件を満たす突発事象が発生していると判定されると、渋滞到達時刻予測部134では、渋滞判定部133から送られた現況交通情報および突発事象情報に基づき、メッシュごとの渋滞開始時刻および渋滞解消時刻を算出する(S42)。そして、算出した渋滞開始時刻および渋滞解消時刻を、予測情報記憶部136に格納する。また到達時刻予測部135では、メッシュごとに出発地からの到達時刻を算出し、算出した出発地からの到達時刻を、予測情報記憶部136に格納する(S43)。次に、渋滞影響範囲算出部140では、メッシュごとの出発地からの到達時刻、渋滞開始時刻、渋滞解消時刻を予測情報記憶部136から読み取り、各メッシュが渋滞影響範囲に含まれるかどうかを判定する。そして、表示用地図情報DB150から出発地付近の地図情報を取得し、地図画面を表示するよう、地図表示部161から表示装置162に描画コマンドを送る(S44)。地図表示部161は、渋滞影響範囲算出部140から渋滞影響範囲に含まれると判定されたメッシュIDを受信し、そのメッシュの表示色を指定の色に変化させるよう、表示装置162にコマンドを送る。表示装置162は、そのコマンドを受け取り、出発地,道路,施設などとともに、地図上に渋滞影響範囲を表示する(S45)。
【0037】
図11は表示装置162の表示例を表したものである。図11(a)は、地図上において、出発地を三角形で表示し、突発事象発生位置を星型で表示し、主要道路を黒線で表示したものである。さらに、メッシュを点線で囲まれた正方形の格子で示し、渋滞影響範囲と判定されたメッシュに斜線を付して示している。
【0038】
このとき、海,湖など、道路がない地域、または、山岳地帯など、道路が少ない地域を考慮して、渋滞影響範囲を表示しても良い。図11(b)は、道路がない、あるいは、少ない地域を考慮した表示装置162の表示例を示している。ここで、湖の位置・形状データが表示用地図情報DBより得ることで、図11(b)に示すように、湖上であり、かつ渋滞影響範囲と判定された地域については、表示色の変更を行わないことにする。このような、表示色の変更を行うか否かの判定は、メッシュ内におけるリンクの本数,密度などを基に行っても良い。また、前記表示色の変更を行うかどうかの判定は、メッシュを何等分かした、各小領域について行っても良い。
【0039】
以上の処理を実行することにより、未来の渋滞状況を予測し、影響を受ける渋滞範囲を求めることができ、この渋滞範囲を回避することにより、将来に渡って確実な渋滞回避が実現できる。
【0040】
図4は、渋滞到達時刻予測部134におけるS42の処理を詳細に説明するフローチャートである。S50では、渋滞判定部133から現況交通情報および突発事象情報を取得する。次に、S51では、取得した現況交通情報および突発事象情報を用いて、渋滞伝播モデルを決定する各種パラメータを設定する。渋滞伝播モデルにおいて各種パラメータを設定することにより、将来の渋滞状況の予測が可能となる。
【0041】
この渋滞伝播モデルの一例を、図5,図6を用いて説明する。この渋滞伝播モデルにおいては、渋滞範囲は突発事象の発生地点を中心としたドーナツ型の形状を保って伸縮すると仮定し、渋滞範囲の外縁と内縁の位置が変化する。図6(a)は、渋滞外縁と渋滞内縁の、突発事象発生位置からの距離の時間変化を表したグラフである。図6(a)において、横軸は時刻を表し、縦軸は突発事象発生位置からの距離を表している。また、図6(b)は、渋滞外縁および渋滞内縁の変位速度の時間変化を表したグラフである。図6(b)において、横軸は時刻を表し、縦軸は渋滞外縁および渋滞内縁の変位速度を表している。このとき、突発事象発生位置から外側に向かう方向を正の値としている。
【0042】
図6(a),(b)に示す渋滞伝播モデルにおいては、渋滞は時刻T1に発生し、時刻T5に解消している。渋滞外縁は、時刻T1〜T2間において一定速度Vj1(≧0)で外側に広がっていき、時刻T2〜T4間においては変化が無く、時刻T4〜T5間において一定速度Vj3(≦0)で内側に縮んでいく。一方、渋滞内縁は、時刻T1〜T3間はまだ存在せず、時刻T3〜T5において一定速度Vj2(≧0)で外側に広がっていく。
【0043】
S51は、現況交通情報および突発事象情報を用いて、図6(a)のT1,T2,T3,T4,T5,Vj1,Vj2,Vj3の各種パラメータを設定する。このため例えば、規制内容(通行止め,片側規制など),原因事象(事故,工事など),規制対象リンクの道路種別,規制の位置,規制の開始時刻などにより表される全ての状況に対し、それぞれ対応する各種パラメータの値を事前に定めておく。このとき、各種パラメータの値は、同様の状況の下で起きた過去の突発渋滞の情報から統計的に求めた値を用いても良い。また、前記各種パラメータは、一つの突発渋滞に対して一律に設定しても良いし、突発事象発生位置を中心にした一定角度ごとの範囲において、それぞれ設定しても良い。
【0044】
そしてS52では、S51で設定した各種パラメータに基づく渋滞伝播モデルと、基本地図情報DB120から取得した基本地図情報を用いて、メッシュごとに渋滞開始時刻および渋滞解消時刻を算出する。このとき、渋滞開始時刻および渋滞解消時刻の算出を行うメッシュは、例えば、突発事象発生位置と当該メッシュの代表点(例えば、メッシュの中心点)との距離が所定の範囲内(例えば、100km以内)という条件を満たすメッシュとして選ばれる。算出された渋滞開始時刻および渋滞解消時刻は、予測情報記憶部136に格納される。
【0045】
具体的なメッシュにおける渋滞開始時刻および渋滞解消時刻の算出処理について説明する。図6(c)は、地図上におけるメッシュを正方形の格子で表している。まず、突発事象発生位置601と、各メッシュの代表点(例えば、メッシュの中心点)との距離を算出する。図6(c)では、突発事象発生位置601とメッシュm1との距離はd1、メッシュm2との距離はd2となっている。
【0046】
次に、図6(a)における、渋滞外縁および渋滞内縁の位置変化を、それぞれ(式1)(式2)により表す。
d=f(t) …(式1)
d=g(t) …(式2)
【0047】
ここで、dは突発事象発生位置からの距離を表し、tは時刻を表す。これより、時刻tにおける渋滞の範囲は、以下の(式3)を満たす範囲だといえる。
g(t)≦d≦f(t) …(式3)
【0048】
また、正の微小時間Δtを設定する。例えば、Δt=5minとする。このとき、突発事象発生位置601から、距離dの位置にあるメッシュの渋滞開始時刻は、以下の条件1,条件2を満たす時刻tとして求められる。
条件1:g(t)=dあるいはf(t)=dを満たす
条件2:g(t+Δt)≦d≦f(t+Δt)を満たす
【0049】
また、メッシュの渋滞解消時刻は、以下の条件3,条件4を満たす時刻tとして求められる。
条件3:g(t)=dあるいはf(t)=dを満たす
条件4:g(t−Δt)≦d≦f(t−Δt)を満たす
【0050】
図6(c)の例において、メッシュm1については、条件1〜条件4に、d=d1を代入することにより、メッシュm1における渋滞開始時刻がt1、渋滞解消時刻がt2と求められる。一方、メッシュm2については、条件1〜条件4に、d=d2を代入しても、条件を満たす時刻tが存在せず、渋滞開始時刻も渋滞解消時刻も算出されない。このように、渋滞開始時刻と渋滞解消時刻が算出されない場合は、そのメッシュまで渋滞範囲が伝播しないことを表しており、予測情報記憶部136の該当領域は“データなし”となる。
【0051】
以上の処理により、各メッシュにおける渋滞開始時刻,渋滞解消時刻が算出される。
【0052】
次に到達時刻予測部135におけるS43の処理の詳細を、図7,図8を用いて説明する。図7は、到達時刻予測部135における処理のフローチャートを示している。図7において、まず、現在位置取得部132が車速センサ,ジャイロセンサ,GPS受信装置などから受信した情報を基に算出した現在位置を取得する(S80)。次に、メッシュ間の移動速度を設定する(S81)。この移動速度は、基本地図情報DB120のメッシュデータに含まれるメッシュ内平均速度212を用いる。メッシュ内平均速度212が無い場合は、事前に渋滞到達時刻予測部134において予測された渋滞状況を基に、渋滞範囲に含まれるリンクの旅行速度を変更してから、メッシュごとに平均を求めてメッシュ間の移動速度を算出しても良い。そして、設定したメッシュ間の移動速度と、基本地図情報DB120から取得した基本地図情報を用いて、メッシュごとに出発地からの到達時刻を算出する(S82)。
【0053】
メッシュごとの到達時刻算出の具体的な処理について、図8を用いて説明する。各メッシュについて、一つの代表点(例えば、メッシュの中心点)を設定し、その代表点間の距離をメッシュ間の距離とする。メッシュ間距離をメッシュ内平均速度212で除することにより、メッシュ間の平均移動時間が求められる。図8は、各メッシュを正方形の格子で表し、各メッシュの代表点を黒丸で表し、その上に各メッシュ間の移動時間を記入したものである。そして、出発地をスタートノード、各メッシュの代表点をノードとし、メッシュの代表点間にメッシュ間の平均移動時間をリンクコストとしたリンクがあると見なしてダイクストラ法を適用することにより、出発地から各メッシュの代表点に到達するまでに必要となる最小所要時間を求めることができる。そこで、メッシュごとに求められた最小所要時間を現在時刻に加算することにより、各メッシュへの到達時刻を算出することができる。またこのとき、到達時刻の算出を行うメッシュは、例えば、出発地とメッシュの代表点(例えば、メッシュの中心点)との距離が所定の範囲内(例えば、100km以内)という条件を満たすメッシュとして選ばれる。
【0054】
図8は、図中左上のメッシュを出発地とし、出発時刻が9:00とした場合の、各メッシュへの到達時刻を、メッシュ上に記入したものである。
【0055】
以上の処理により、各メッシュにおける出発地からの到達時刻が算出される。
【0056】
次に渋滞影響範囲算出部140におけるS44の処理の詳細を、図10を用いて説明する。この処理は、ある領域内に含まれる各メッシュについて行われる。各領域は、例えば、出発地と当該メッシュの代表点(例えば、メッシュの中心点)との距離が所定の範囲内(例えば、100km以内)という条件を満たすメッシュとして選ばれる。
【0057】
まず、渋滞影響範囲算出部140は、あるメッシュの出発地からの到達時刻,渋滞開始時刻,渋滞解消時刻を、予測情報記憶部136から読み取る(S110)。ここで、メッシュごとの到達時刻をTs、渋滞開始時刻をTj1、渋滞解消時刻をTj2とする。図9に、予測情報記憶部136に格納される、メッシュごとの出発地からの到達時刻,渋滞開始時刻,渋滞解消時刻のフォーマットの一例を示す。予測情報記憶部136には、出発地に対応したメッシュに対して所定範囲内の各メッシュについて図9に示すフォーマットのデータが格納されているものとする。
【0058】
そして、処理対象としているメッシュについて予測情報記憶部136から読み出したデータに、到達時刻Tsのデータが存在するかどうかを判定する(S111)。データがない場合は(S111:データなし)、該当メッシュは渋滞影響範囲に含まれない、と判定される(S117)。これは、図9において、メッシュIDが“45678901”のデータ例に示される状態である。
【0059】
またTsのデータがある場合は(S111:データあり)、次に、該当メッシュにおける渋滞開始時刻Tj1のデータが存在するかどうかを判定する(S112)。データがない場合は(S112:データなし)、該当メッシュは渋滞影響範囲に含まれない、と判定される(S117)。これは、図9において、メッシュIDが“34567890”のデータ例に示される状態である。
【0060】
Tj1のデータがある場合は(S112:データあり)、次に、該当メッシュにおける渋滞開始時刻Tj2のデータが存在するかどうかを判定する(S113)。データがない場合は(S113:データなし)、S116において、以下の(式4)を満たすかどうかの判定が行われる。数式(4)を満たす場合(S116:Yes)、そのメッシュは渋滞影響範囲に含まれると判定され、(式4)を満たさない場合は(S116:No)、渋滞影響範囲に含まれないと判定される(S117)。
Tj1≦Ts …(式4)
【0061】
これは、図9において、メッシュIDが“23456789”のデータ例に示される状態である。この例では、Ts=9:10,Tj1=9:05で、(式1)を満たすため、該当メッシュは渋滞影響範囲に含まれる、と判定される(S115)。
【0062】
最後に、Tj2がある場合は(S113:データあり)、S115において、以下の(式5)を満たすかどうかの判定が行われる。(式5)を満たす場合(S115:Yes)、そのメッシュは渋滞影響範囲に含まれると判定され(S115)、(式5)を満たさない場合は(S116:No)、渋滞影響範囲に含まれないと判定される(S117)。
Tj1≦Ts≦Tj2 …(式5)
【0063】
これは、図9において、メッシュIDが“12345678”の例に示される状態である。この例では、Ts=9:00,Tj1=9:10,Tj2=9:30で、数式(2)を満たさないため、当該メッシュは渋滞影響範囲に含まれない、と判定される。
【0064】
以上の処理を所定範囲内のメッシュについて、各々行う。以上の処理より、各メッシュについて渋滞影響範囲に含まれるか否かが判定される。そしてこのように、渋滞影響範囲算出部140において、メッシュごとに渋滞影響範囲に含まれるか否かを判定するものとしたことにより、計算量が削減され、処理時間が短くなる。
【0065】
また、メッシュ単位に渋滞影響範囲を判定するのではなく、リンクごとに渋滞影響範囲に含まれるか否かを判定しても良い。このとき、渋滞到達時刻予測部134および到達時刻予測部135のうち、少なくともどちらか一つにおいて、リンクごとに到達時刻の算出を行う。S42における処理で、渋滞到達時刻予測部134においてリンクごとに渋滞開始時刻および渋滞解消時刻の算出を行う場合、図6で説明をした処理では、突発事象発生位置とメッシュの代表点間の距離を用いたところを、突発事象発生位置とリンクの代表点(例えば、リンクの中間点)間の距離を用いることにする。一方、S43における処理でリンクごとに到達時刻の算出を行う場合、図8を用いて説明したメッシュ単位の到達時刻の計算処理の代わりに、通常のリンク単位のダイクストラ法を用いて、各リンクまでの所要時間を算出することにする。そして、リンクごとに渋滞影響範囲に含まれるか否かを判定する場合は、予測情報記憶部136には、メッシュIDの代わりにリンクIDが格納され、一つのリンクIDにつき、出発地からの到達時刻,渋滞開始時刻,渋滞解消時刻が一つずつ記録される。
【0066】
以上のように、リンクごとに渋滞影響範囲に含まれるか否かの判定を行う場合、メッシュ単位で予測する場合と比較して、より正確な渋滞影響範囲算出が実現できる。
【0067】
また、一つの突発事象に対して、複数回,予測処理を行っても良い。こうすることで、さらに予測の正確さを増し、適切な渋滞影響範囲を算出することができる。この場合、S42およびS43の処理では、前回算出した自車到達時刻,渋滞開始時刻,渋滞解消時刻を記憶しておくことにする。そして、S42およびS43において、各メッシュにおける出発地からの到達時刻,渋滞開始時刻,渋滞解消時刻を算出した際、前回の算出結果と比較し、差が所定の閾値を越えた場合、S44の処理を行うとしても良い。こうすることで、同じ突発事象に関して前回の予測結果と現況の交通状況の乖離が拡大した場合のみ、渋滞影響範囲の算出を繰り返すため、交通情報を受信するたびに全ステップを繰り返す場合と比較して、計算量を削減することができる。
【実施例2】
【0068】
図12は、図1に示した交通情報システム110に、出発地と目的地間を結ぶ経路を探索する経路探索の機能を持つ経路探索部1420を追加した交通情報システム1410の構成図である。
【0069】
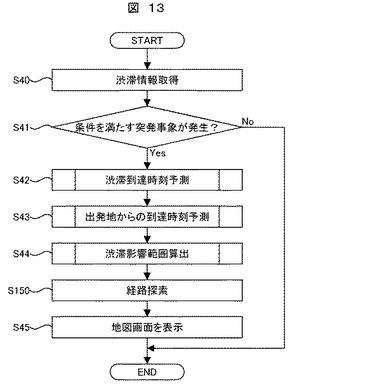
図13は、交通情報システム1410における処理手順を示すフローチャートである。図3に示したフローチャートの各ステップと同様の処理を行うステップについては、同じ略号を用いて示している。図3に示される実施例1の処理手順と比較した場合、本実施例においては、経路探索部1420における経路探索処理(S150)が加わっている。このS150では、出発地から目的地に向かう最短時間経路を、ダイクストラ法などを用いて探索する。このとき、リンクコストは、基本地図情報DB120に含まれる、リンクごとの旅行時間225を用いて設定される。また、基本地図情報DB120に含まれる統計交通情報を用いて、リンクコストを設定しても良い。さらに、交通情報受信部131から取得される現況交通情報を用いて、リンクコストを設定しても良い。
【0070】
経路探索部1420は、S44において渋滞影響範囲に含まれると判定されたメッシュのメッシュIDを、渋滞影響範囲算出部140から取得し、渋滞影響範囲に含まれると判定されたメッシュに含まれるリンクについて、リンクコストを再設定する。リンクコストの再設定においては、例えば、渋滞影響範囲内の平均速度を一律に設定し(例えば、5km/h)、各リンクにおいて、リンク長223を渋滞影響範囲内の平均速度で除して、リンクコストとする。あるいは、リンクコストは渋滞の端部に近づくほど小さく、渋滞の中央部に近づくほど大きく設定しても良い。これは、渋滞予測結果の信頼度が、渋滞の端部では低く、渋滞の中央では高いためである。
【0071】
具体的なリンクコストの算出法としては、例えば、以下のような方法がある。突発事象発生位置からの距離をdと表し、突発事象発生位置から渋滞内縁までの距離をdi、突発事象発生位置から渋滞外縁までの距離をdoとおくと、渋滞の中央部は突発事象発生位置からdm=(di+do)/2の距離にあるといえる。さらに、通常時のリンクコスト、および前記滞影響範囲内の平均速度を一律に設定して求めたリンクコストを、それぞれdを用いた関数C1(d),C2(d)と表す。このとき、突発事象発生位置からの距離dによるリンクコストC(d)を以下の(式6)から求める。ここで、N(μ,σ2)は、平均μ,分散σ2の正規分布を表す。
C(d)={1+N(C2(dm)/C1(dm),(do−di)/2)}×C1(d)
(di≦d≦doの場合) …(式6)
C(d)=C1(d) (d≦di、またはd≧doの場合)
【0072】
これにより、予測の信頼度が高い渋滞中央部は、確実に回避する一方、予測の信頼度が低い渋滞端部において、交通状況と出発地および目的地の位置関係によっては、渋滞端部を通過する経路が選択されることもあり得る。すなわち、より交通状況に即した適切な経路探索を行うことができる。
【0073】
続くS45においては、実施例1と同様に、地図表示部161は、渋滞影響範囲内と判定されたメッシュの色を変化させて表示するよう、表示装置162にコマンドを送る。このとき、表示装置162は、経路探索部1420から取得した経路情報を基に、再探索後の推奨経路を表示しても良い。
【0074】
なお、図4のS52において、渋滞到達時刻を算出するメッシュを決定する際に、目的地および出発地を含む所定領域に、メッシュの代表点が含まれることを条件としても良い。この所定領域としては、例えば、出発地と目的地を2焦点とする楕円型の内部に含まれる領域として良い。そして、図7のS82における、出発地からの到達時刻を算出するメッシュや、図3のS44における渋滞影響範囲の判定を行うメッシュについても、目的地および出発地を含む所定領域に、メッシュの代表点が含まれる場合も同様の処理を行う、として良い。
【0075】
以上のように、出発地と目的地を含む所定領域に含まれるメッシュについてのみ処理を行うとした場合、この後通過する可能性の高いメッシュについてのみ各処理を行うことになり、効率的な処理が可能となる。
【実施例3】
【0076】
実施例1および実施例2においては、道路種別を考慮せずに渋滞影響範囲の算出を行ったが、本実施例においては、道路種別を考慮した渋滞影響範囲算出について説明する。この場合の、実施例1および実施例2の構成との相違点は、基本地図情報DB120,渋滞到達時刻予測部134,到達時刻予測部135,予測情報記憶部136,地図表示部161における処理である。
【0077】
以下、実施例1および実施例2との相違点であるこれら各処理について説明する。まず、メッシュごとに渋滞影響範囲の算出を行う場合、基本地図情報DB120においては、各道路種別ごとに算出されたメッシュ内平均速度212を格納しておく。
【0078】
S172は、渋滞到達時刻算出処理で必要となる渋滞伝播モデルの各種パラメータ(図5参照)を、各道路種別ごとに求めておく。
【0079】
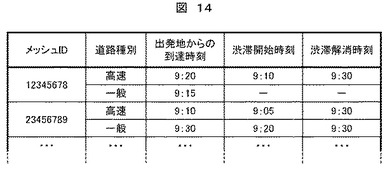
その上で、S42では、渋滞開始時刻および渋滞解消時刻の算出を、道路種別ごとに行う。同様に、S43は、到達時刻の算出を、道路種別ごとに行う。S42およびS43で算出した到達時刻,渋滞開始時刻,渋滞解消時刻は、予測情報記憶部136に格納される。図14は、本実施例における予測情報記憶部136に格納されるメッシュごとの出発地からの到達時刻,渋滞開始時刻,渋滞解消時刻のフォーマットを示しており、各メッシュについて道路種別ごとに、自車到達時刻,渋滞開始時刻,渋滞解消時刻が格納される。
【0080】
ここで、ある突発事象が発生した場合、発生地点のリンクの道路種別と同じ道路種別のリンクに沿って渋滞が伝播していくものとして渋滞開始時刻および渋滞解消時刻の算出が行われる。例えば、高速道路上で発生した突発事象による渋滞は、地図上での距離は近いが、道路種別の異なる一般道路には伝播しないといえる。そして突発渋滞は高速道路上で発生した突発事象を原因とする場合、一般道路上には直接渋滞範囲が伝播しないため、S45では地図上において、高速道路上における渋滞範囲に色を付け、突発渋滞の伝播の様子を表示することになる。
【0081】
あるいは、異なる道路種別間でも渋滞が伝播するとしても良い。このとき、異なる種別の道路の接続地点で新たな突発事象が発生したとみなし、渋滞伝播の予測を行う。例えば、高速道路上で発生した突発事象による渋滞が、インターチェンジから一般道路に伝播する状況が考えられる。このとき、インターチェンジを新たな突発事象発生点とおいて、一般道路上での渋滞伝播を予測する。この場合は、突発渋滞は高速道路上で発生した突発事象を原因としているが、S45では地図上において、インターチェンジを突発事象発生位置とした場合のと同様の一般道上における突発渋滞の伝播の様子を表示する。
【0082】
S44では、渋滞影響範囲算出部140の処理として、予測情報記憶部136から、各メッシュの道路種別ごとの、出発地からの到達時刻,渋滞開始時刻,渋滞解消時刻を読み取り、道路種別ごとの渋滞影響範囲の算出を行う。図14の例では、メッシュIDが“12345678”のメッシュにおいて、高速道路では(式1)が満たされるため、渋滞影響範囲に含まれると判定される。一方、一般道路では、渋滞開始時刻および渋滞解消時刻のデータが両方ないため、渋滞影響範囲に含まれないと判定される。
【0083】
地図表示部161においては、ユーザが各道路種別における渋滞影響範囲を把握できるような表示を行うよう、描画コマンドを表示装置162に送る。例えば、高速道路のリンクと一般道路のリンクが同一メッシュ内にあり、高速道路上のみで渋滞が発生する場合、前述のように高速道路の色のみを変えて表示し、一般道路の色は通常通りに表示するような描画コマンドを送る。
【符号の説明】
【0084】
110,1410 交通情報システム
120 基本地図情報DB
130 予測部
131 交通情報受信部
132 現在位置取得部
133 渋滞判定部
134 渋滞到達時刻予測部
135 到達時刻予測部
136 予測情報記憶部
140 渋滞影響範囲算出部
150 表示用地図情報DB
160 表示部
161 地図表示部
162 表示装置
1420 経路探索部
【特許請求の範囲】
【請求項1】
突発事象の情報を含む交通情報を取得する交通情報取得ステップと、
前記突発事象により発生した渋滞の開始時刻,解消時刻の少なくとも一方を、緯度経度に基づき分割された矩形領域であるメッシュごとに予測する渋滞到達時刻予測ステップと、
出発位置および出発時刻を取得する位置情報取得ステップと、
出発位置および出発時刻に基づき出発位置周辺のメッシュごとに出発地からの到達時刻を予測する到達時刻予測ステップと、
前記渋滞の開始時刻、および解消時刻の少なくとも一方と前記出発地からの到達時刻とを用いて、突発事象により発生した前記渋滞が発生してから解消するまでの間に渋滞の影響を受ける範囲をメッシュ毎に算出する渋滞影響範囲算出ステップと、
を実行することを特徴とする渋滞範囲予測方法。
【請求項2】
前記渋滞影響範囲算出ステップは、道路種別ごとの渋滞影響範囲を算出することを特徴とする請求項1に記載の渋滞範囲予測方法。
【請求項3】
前記渋滞影響範囲に含まれるリンクについて、渋滞影響範囲外とは異なるリンクコストを再設定した上で、出発地から目的地までの経路探索を行う経路探索ステップをさらに備えることを特徴とする請求項1に記載の渋滞範囲予測方法。
【請求項4】
突発事象の情報を含む交通情報を取得する交通情報取得部と、自車の現在位置を取得する現在位置取得部と、を備える渋滞範囲予測装置において、
前記突発事象により発生した渋滞の開始時刻,解消時刻の少なくとも一方を、緯度経度に基づき分割された矩形領域であるメッシュごとに予測する渋滞到達時刻予測部と、
現在位置および現在時刻に基づき現在位置周辺のメッシュごとに現在位置からの自車到達時刻を予測する自車到達時刻予測部と、
前記渋滞の開始時刻、および解消時刻の少なくとも一方と前記現在位置からの自車到達時刻とを用いて、突発事象により発生した前記渋滞が自車に影響する範囲をメッシュ毎に算出する渋滞影響範囲算出部と、
を備えることを特徴とする渋滞範囲予測装置。
【請求項5】
前記渋滞影響範囲算出部は、道路種別ごとの渋滞影響範囲を算出することを特徴とする請求項4に記載の渋滞範囲予測装置。
【請求項6】
前記経路探索部は、前記渋滞影響範囲に含まれるリンクについて、渋滞影響範囲外とは異なるリンクコストを再設定した上で、現在位置から目的地までの経路探索を行う経路探索部をさらに備えることを特徴とする請求項4に記載の渋滞範囲予測装置。
【請求項1】
突発事象の情報を含む交通情報を取得する交通情報取得ステップと、
前記突発事象により発生した渋滞の開始時刻,解消時刻の少なくとも一方を、緯度経度に基づき分割された矩形領域であるメッシュごとに予測する渋滞到達時刻予測ステップと、
出発位置および出発時刻を取得する位置情報取得ステップと、
出発位置および出発時刻に基づき出発位置周辺のメッシュごとに出発地からの到達時刻を予測する到達時刻予測ステップと、
前記渋滞の開始時刻、および解消時刻の少なくとも一方と前記出発地からの到達時刻とを用いて、突発事象により発生した前記渋滞が発生してから解消するまでの間に渋滞の影響を受ける範囲をメッシュ毎に算出する渋滞影響範囲算出ステップと、
を実行することを特徴とする渋滞範囲予測方法。
【請求項2】
前記渋滞影響範囲算出ステップは、道路種別ごとの渋滞影響範囲を算出することを特徴とする請求項1に記載の渋滞範囲予測方法。
【請求項3】
前記渋滞影響範囲に含まれるリンクについて、渋滞影響範囲外とは異なるリンクコストを再設定した上で、出発地から目的地までの経路探索を行う経路探索ステップをさらに備えることを特徴とする請求項1に記載の渋滞範囲予測方法。
【請求項4】
突発事象の情報を含む交通情報を取得する交通情報取得部と、自車の現在位置を取得する現在位置取得部と、を備える渋滞範囲予測装置において、
前記突発事象により発生した渋滞の開始時刻,解消時刻の少なくとも一方を、緯度経度に基づき分割された矩形領域であるメッシュごとに予測する渋滞到達時刻予測部と、
現在位置および現在時刻に基づき現在位置周辺のメッシュごとに現在位置からの自車到達時刻を予測する自車到達時刻予測部と、
前記渋滞の開始時刻、および解消時刻の少なくとも一方と前記現在位置からの自車到達時刻とを用いて、突発事象により発生した前記渋滞が自車に影響する範囲をメッシュ毎に算出する渋滞影響範囲算出部と、
を備えることを特徴とする渋滞範囲予測装置。
【請求項5】
前記渋滞影響範囲算出部は、道路種別ごとの渋滞影響範囲を算出することを特徴とする請求項4に記載の渋滞範囲予測装置。
【請求項6】
前記経路探索部は、前記渋滞影響範囲に含まれるリンクについて、渋滞影響範囲外とは異なるリンクコストを再設定した上で、現在位置から目的地までの経路探索を行う経路探索部をさらに備えることを特徴とする請求項4に記載の渋滞範囲予測装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−99798(P2011−99798A)
【公開日】平成23年5月19日(2011.5.19)
【国際特許分類】
【出願番号】特願2009−255687(P2009−255687)
【出願日】平成21年11月9日(2009.11.9)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成23年5月19日(2011.5.19)
【国際特許分類】
【出願日】平成21年11月9日(2009.11.9)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]