
渋滞緩和システム、地上システム、渋滞予測制御装置

【課題】車線変更時の交通を統制して隘路通過時の渋滞を緩和する渋滞緩和システム、地上システム及び渋滞予測制御装置を提供すること。
【解決手段】渋滞緩和システム1において、地上システム3は、所定部Sを通過する車両の識別情報を取得する第1の識別情報取得手段14、13と、所定部を通過した第1通過時刻を取得する第1の通過時刻取得手段14、13と、隘路を通過した車両の識別情報を取得する第2の識別情報取得手段15,9と、隘路を通過した第2通過時刻を取得する第2の通過時刻取得手段15、9と、第1取得時刻に基づき前記隘路を通過する各車両の優先順位を決定する渋滞演算制御部と、優先順位を各車両に送信する送信装置と、を有し、渋滞予測制御装置20は、優先順位を受信する受信装置35と、優先順位を乗員に報知する報知装置36,37と、を有する、ことを特徴とする。
【解決手段】渋滞緩和システム1において、地上システム3は、所定部Sを通過する車両の識別情報を取得する第1の識別情報取得手段14、13と、所定部を通過した第1通過時刻を取得する第1の通過時刻取得手段14、13と、隘路を通過した車両の識別情報を取得する第2の識別情報取得手段15,9と、隘路を通過した第2通過時刻を取得する第2の通過時刻取得手段15、9と、第1取得時刻に基づき前記隘路を通過する各車両の優先順位を決定する渋滞演算制御部と、優先順位を各車両に送信する送信装置と、を有し、渋滞予測制御装置20は、優先順位を受信する受信装置35と、優先順位を乗員に報知する報知装置36,37と、を有する、ことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、隘路などの渋滞を緩和する渋滞緩和システム、地上システム、渋滞予測制御装置に関する。
【背景技術】
【0002】
道路の合流や工事箇所などでは2車線が1車線になるなど車線数が減少する。この場合、他車線の車両と自車線の車両が1つの車線に合流したり、車線変更する必要があるなど、他車線の車両の位置を把握しながら自車両の操作が要求される。
【0003】
図1は、隘路と走行する車両を示す図である。図1では、右車線に工事箇所110があるため隘路が生じ、工事箇所110の手前から2車線が一時的に1車線となっている。工事箇所110ではその所定距離手前に道路標示120が設けられることが多く、道路標示120により工事箇所110の存在を把握した右車線の車両の運転者は、独自の判断及びタイミングで左車線に車線変更する。走行通過台数が比較的多い状態で車線の変更が行われると必然的にそれまでと同じ速度で走行することが困難になり、左車線さらには右車線においても渋滞が発生する。また、走行台数が多い状態では渋滞の隊列が長くなるため、やがては右車線から左車線への車線変更に割り込みが必要となる。割り込みをいつ行うか、又は、割り込みを受け入れるか否かは、各運転者の判断に任せられているため、割り込みする側の運転者と割り込まれる側の運転者の意識のずれなどにより接触事故が誘発されることもある。さらに渋滞の隊列が延びて交差点を跨ると、その交差点と直行する道路からの車両も割り込みせざるを得ないため、混乱が助長され渋滞が長期化する場合もある。
【0004】
割り込みの意志を伝えるため、車車間通信により自車の要求を他車に伝える技術が提案されている(例えば、特許文献1参照。)。特許文献1の技術によれば、車両が割り込み要請を送信し、割り込み要請を受信した他の車両の運転者が割り込み許可すると、元の車両に割り込み許可が送信される。したがって、割り込みする側の運転者と割り込まれる側の運転者のコミュニケーションが可能となり、円滑な合流が可能となるとしている。
【特許文献1】特開2004−118608号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1記載の技術は、割り込みする側と割り込まれる側の2車両間でのみ意思の疎通を図るものであるため、ある車両間で許可された割り込みが別の車両間の割り込みに影響を与え、混乱を生じさせる可能性がある。また、割り込みのタイミングや場所が各運転者の判断に任せられている点で従来と変わらないため、割り込み時に混乱するおそれもある。また、例えば図1で右車線の複数の車両が割り込み要求を送信すると、左車線の多くの車両が割り込み要求を受信することになり、左車線の車両の運転者はどの車両から割り込み要求があったのか判別することが困難である。
【0006】
本発明は、上記課題に鑑み、車線変更時の交通を統制して隘路通過時の渋滞を緩和する渋滞緩和システム、地上システム及び渋滞予測制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題に鑑み、本発明は、車載された渋滞予測制御装置と、複数の車両が通過する隘路の渋滞を緩和する地上システムと、を有する渋滞緩和システムにおいて、地上システムは、所定部(例えば、特定点S)を通過する車両の識別情報(例えば、車両ナンバー)を取得する第1の識別情報取得手段(例えば、通信装置14又は監視カメラ13)と、所定部を通過した第1通過時刻を取得する第1の通過時刻取得手段(例えば、通信装置14又は監視カメラ13)と、隘路を通過した車両の識別情報を取得する第2の識別情報取得手段(例えば、通信装置15又は監視カメラ9)と、隘路を通過した第2通過時刻を取得する第2の通過時刻取得手段(例えば、通信装置15又は監視カメラ9)と、第1取得時刻に基づき前記隘路を通過する各車両の優先順位を決定する渋滞演算制御部と、優先順位を各車両に送信する送信装置と、を有し、渋滞予測制御装置は、優先順位を受信する受信装置と、優先順位を乗員に報知する報知装置と、を有する、ことを特徴とする。
【0008】
本発明によれば、隘路の手前の複数の車両の優先順位を決定して、それを各車両の乗員に報知することができるので、複数の車両が、互いにどの車両がどの順番で車線変更するかを把握でき、不測の事態を防止できる。また、各車両の走行位置を優先順位に従い制御するので、割り込みによる乱れも抑制でき、結果的に隘路の通過時間を最小にすることができる。
【0009】
また、本発明の一形態において、渋滞演算制御部は、第1通過時刻と第2通過時刻に基づき所定部から隘路を通過するまでの推定通過時間を推定し、該推定通過時間を各車両に送信する、ことを特徴とする。
【0010】
本発明によれば、推定通過時間を各車両に送信することで、各車両の運転者は渋滞を通過するまでの時間を予測できる。
【0011】
また、本発明一形態において、 車線が複数の道路のいずれかの車線に隘路が発生した場合、渋滞演算制御部は、所定部を通過してから隘路までの所定区間において、左右の車線を走行する車両数が均等になるように、各車両に走行すべき車線情報を送信する、ことを特徴とする。
【0012】
本発明によれば、隘路まで左右の車線を走行する車両の数を均等にできるので、一方の車線に車両が偏ることなく、渋滞を緩和することができる。
【0013】
また、本発明の一形態において、地上システムは、所定部から隘路までに存在する信号機の表示を車線毎に制御する信号機制御部を有し、信号機制御部は、優先順位が高い車両を低い車両よりも早期に通過させ、優先順位の低い車両が高い車両よりも隘路側を走行する場合は低い車両を停止させるように、信号機の表示を制御する、ことを特徴とする。
【0014】
本発明によれば、信号機の表示により複数の車両の隊列が優先順位に従ったものとなるので、隊列長も最小限にでき、結果として渋滞を緩和できる。
【0015】
また、本発明の一形態において、渋滞予測制御装置は、車線変更しなければ隘路を通過できない場合、現在の車線から隘路を通過して予めナビが設定した経路に戻る場合の、車線の変更数が最小となる車線を好ましい車線として運転者に報知する、ことを特徴とする。
【0016】
本発明によれば、隘路を通過するために車線変更が必要な場合でも、ナビが設定した車線に最も戻りやすい車線を運転者に推奨することができる。
【発明の効果】
【0017】
車線変更時の交通を統制して隘路通過時の渋滞を緩和する渋滞緩和システム、地上システム及び渋滞予測制御装置を提供することができる。
【発明を実施するための最良の形態】
【0018】
以下、本発明を実施するための最良の形態について図面を参照しながら実施例を挙げて説明する。
【実施例1】
【0019】
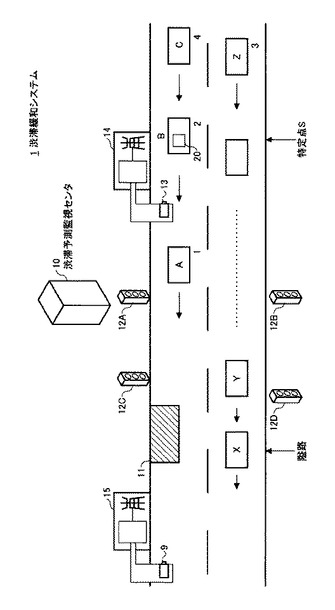
図2は、渋滞緩和システム1が適用された道路及び車両の概略図を示す。片側2車線の道路の右車線を車両A・B・Cが、左車線を車両X・Y・Z(以下、車両A〜Zを単に車両という場合がある)が走行しており、右車線に工事箇所11があり隘路となっている。隘路では2車線の車両が一車線に合流するため渋滞が予想される。渋滞予測監視センタ10は、隘路を通過するまで各車両に種々の情報を提供する。
【0020】
渋滞予測監視センタ10は通信装置14により、車載された渋滞予測制御装置20から車両の識別情報(車両ナンバー)、渋滞開始点等の特定点Sの通過時刻などを受信し、また監視カメラ13、9により車両のナンバーを撮影する。渋滞予測監視センタ10はそれらの情報に基づき隘路を通過する車両の優先順位や好ましい車線を決定し車両に送信することで、隘路の渋滞を緩和する。また、隘路手前に設置した信号機12A〜Dにより各車両の通過を制御することで、隘路を走行する車両の隊列を整える。
【0021】
また、渋滞予測監視センタ10は、通信装置15又は監視カメラ9により隘路を通過した車両の通過時刻等を受信するので、特定点Sから通信装置15又は監視カメラ9までの通過時間を元に、今後の推定通過時間を推定する。優先順位、好ましい車線及び推定通過時間は、通信装置14から各車両に送信され、車両のディスプレイに表示される。
【0022】
このような構成により、渋滞緩和システム1は、隘路の渋滞を予測すると共に、右車線の車両A・B・C及び左車線の車両X・Y・Zの隊列を制御でき、割り込みを極小にして隘路であっても快適に走行することを可能にする。また、各車両の運転者は優先順位、好ましい走行車線を把握して適切なタイミングで車線変更することができる。
【0023】
〔渋滞予測制御装置20〕
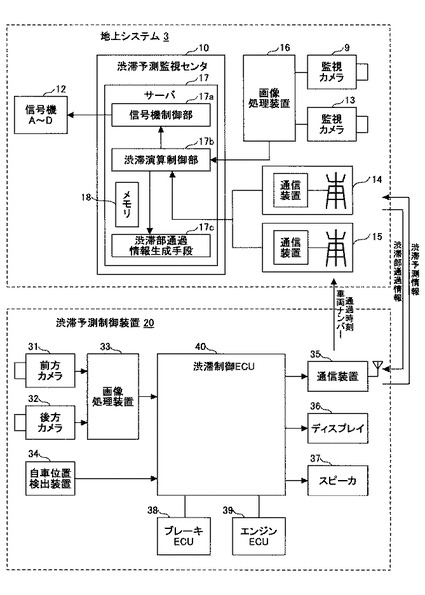
図3は、渋滞予測制御装置20及び地上システム3から成る渋滞緩和システム1のブロック図を示す。渋滞予測制御装置20は、種々のセンサ及び装置とCAN(Controller Area Network)及びLIN(Local Interconnect Network)等の車内LANを介して接続された渋滞制御ECU40により制御される。渋滞制御ECU40には、前方カメラ31、後方カメラ32と接続された画像処理装置33が接続されている。前方カメラ31は、車両前方の水平下向きに所定角範囲で広がる領域を撮影し、所定の輝度階調(例えば、256階調)のデジタル画像(以下、前方画像という)を出力する。前方カメラ31は例えば白線認識用のカメラと兼用することができる。後方カメラ32は、車両後方の水平下向きに所定角範囲で広がる領域を撮影し、所定の輝度階調のデジタル画像(以下、後方画像という)を出力する。後方カメラ32は例えば駐車支援用のカメラと兼用することができる。
【0024】
図1の車両Bの渋滞予測制御装置20の場合、前方画像には車両Bの先行車両A,後方画像には車両Bの後続車両C、のナンバープレートが撮影される。画像処理装置33は、前方画像及び後方画像それぞれを画像処理して車両ナンバーを認識する。画像処理装置33は、例えばナンバープレートが撮影される前方画像及び後方画像の下半分の領域から矩形領域をパターンマッチングなどにより抽出し、2値化処理の後、公知のOCR(Optical Charactor Reader)処理により車両ナンバーを認識する。
【0025】
渋滞制御ECU40に接続された自車位置検出装置34は、GPS(Global Positioning System)受信機の情報、車速センサ及びジャイロセンサの検出信号を利用して、自車両の位置を検出する。GPS受信機は複数のGPS衛星から受信した電波の到達時間から距離を演算することにより、自動車の位置(座標)を算出し、この位置に車速センサが検出する走行距離とジャイロセンサが検出する走行方位を累積して車両の走行経路を推定する自律航法により車両の現在位置を継続的に検出している。
【0026】
通信装置35は、渋滞予測情報を地上システム3に送信する。通信装置35と通信装置14、15は、DSRC(Dedicated Short Range Communication)、無線LAN、光ビーコン、電波ビーコン等により、狭域通信するための通信装置である。DSRCにより通信する場合、通信装置14はその前後の処理範囲において受信可能な電波を送信しており、所定以上の電波強度の通信エリアに入ると、通信装置14が要求する渋滞予測情報を送信する。
【0027】
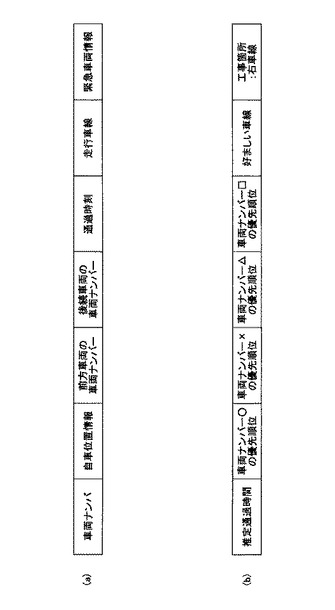
図4(a)は渋滞予測情報の一例を示す。渋滞予測情報は、自車両の車両ナンバー、自車位置情報、前方車両の車両ナンバー、後続車両の車両ナンバー、及び、特定点Sを通過した通過時刻、自車位置情報から判定される走行車線である。渋滞制御ECU40は、通信エリアに入ると通信装置35により渋滞予測情報を渋滞予測監視センタ10に送信する。なお、前方車両の車両ナンバー、後続車両の車両ナンバーを送信するのは、多くの車両ナンバーにより情報の精度を向上させるためである。
【0028】
また、通信装置35は、通信装置15との通信エリアに入ると自車両の車両ナンバー、特定点Sの通過時刻を通信装置15に送信する。これらの情報により、渋滞予測監視センタ10は後述するように、以降の車両の推定通過時間を推定できるようになる。
【0029】
ところで、一般車両同士であれば、道路を走行する上での優先関係はほとんどないが、救急車、警察車両などの緊急車両、バスなどの公共車両は、一般車両よりも優先されるべき場合が多い。このような状況に備えるため、渋滞予測情報には、緊急車両であることを示す情報、及び、緊急車両の場合には緊急の程度を示す情報である緊急車両情報が含まれる。
【0030】
また、渋滞制御ECU40は、通信装置35により渋滞予測監視センタ10から渋滞部通過情報を受信する。図4(b)は渋滞部通過情報の一例を示す。渋滞部通過情報は、特定点Sから例えば隘路(正確には通信装置15又は監視カメラ9)を通過するまでに推定される推定通過時間、車両ナンバーに対応づけられた前後車両の優先順位、好ましい車線、工事箇所11の車線、等を含む。推定通過時間、優先順位及び好ましい車線については後述する。
【0031】
そして、ディスプレイ36及びスピーカ37は、渋滞部通過情報を車両の乗員に知らせるユーザインターフェイスとなる。推定通過時間、前後左右の車両の優先順位、好ましい車線、工事箇所11の車線、がディスプレイ36に表示され、また、音声がスピーカ37から出力されるので車両の乗員は渋滞部を通過するまでの推定時間、後方車両が優先されるか否か、自車線に工事箇所11があるか否かを知ることができる。
【0032】
渋滞制御ECU40は渋滞部通過情報に基づきブレーキECU38及びエンジンECU39を制御する。例えば、渋滞度が高いためしばらく走行できない場合には、エンジンECU39によりアイドル回転を停止する省燃費制御に移行し、エアコンなどの消費電力が大きいにも関わらずエンジン回転数が低い場合にはアイドル回転数を増大させてバッテリ残量を確保する。また、渋滞の手前を高速で走行している場合、渋滞制御ECU40はブレーキECU38に減速を要求する。これにより、例えば、渋滞に気づかずに渋滞部の最後尾の車両に誤って衝突することが防止できる。
【0033】
〔地上システム3〕
地上システム3は、渋滞予測監視センタ10により制御される。渋滞予測監視センタ10は、プログラムを実行するCPU、ハードディスクドライブとRAM(以下、両者を単にメモリ18という)、ROM、NIC(Network Interface Card)などが相互にバスで接続されたコンピュータを本体とするサーバ17により構成される。CPUがプログラムを実行することで、信号機制御部17a、渋滞演算制御部17b及び渋滞部通過情報生成部17cが実現される。
【0034】
通信装置14、15、監視カメラ9、13、信号機12A〜12Dは、道路に所定間隔又は所定の場所に設けられているため、その位置は固定されている。本実施形態では、通信装置14と監視カメラ13は隘路の手前であって特定点Sの前又は後に、信号機12A〜12Dは隘路(工事箇所11)の手前に、通信装置15と監視カメラ9は工事箇所11よりも後方にある。
【0035】
渋滞予測監視センタ10には、監視カメラ9、13と接続された画像処理装置16が接続されている。監視カメラ9、13は、路面から所定の高さに水平下向きの俯角をもって設けられ、所定角範囲で広がる領域を撮影し、所定の輝度階調(例えば、256階調)のデジタル画像(以下、道路画像という)を出力する。画像処理装置16は、車両の正面又は背面が撮影された道路画像から、画像処理装置33と同様に公知のOCR(Optical Character Reader)処理により車両ナンバーを認識する。
【0036】
車両から送信された特定点Sを通過した通過時刻はメモリ18に記憶される。また、監視カメラ9により車両ナンバーが認識された車両はその撮影時刻、隘路を通過した通過時刻、をメモリ18に記憶してもよい。渋滞部通過情報生成部17cは、2地点間を通過した通過時間に基づき隘路を通過するまでの推定通過時間を推定する。
【0037】
また、通信装置14は、車両から渋滞予測情報を受信し、また、渋滞部通過情報を車両に送信する。通信装置15は、車両ナンバー、通過時刻を車両から受信する。
【0038】
・特定点S
特定点Sの特定について説明する。特定点Sは例えば渋滞開始点であり、渋滞が生じていない場合は隘路の存在を示す道路標識や路上表示の位置、又は、監視カメラ13や通信装置14の位置である。
【0039】
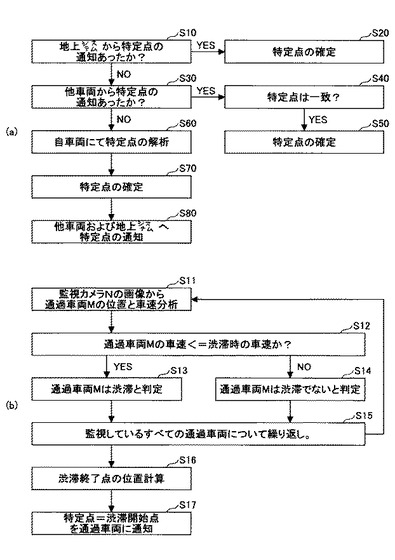
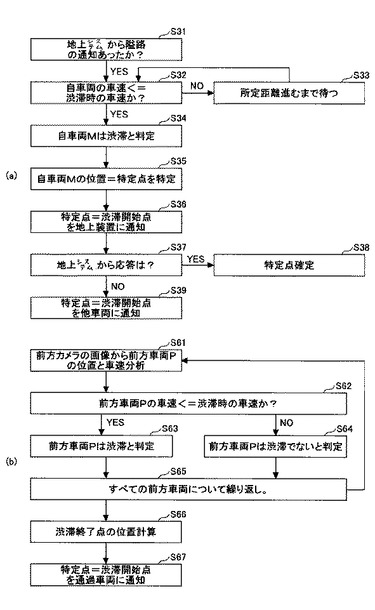
図5(a)は、渋滞制御ECU40が道路標識等を特定点Sに特定する手順のフローチャート図を示し、図5(b)は図5(a)のステップS10のフローチャート図、図6(a)はステップS30のフローチャート図、図6(b)はステップS60のフローチャート図をそれぞれ示す。
【0040】
(S10、S20)
地上システム3が特定点Sの位置を把握している場合、その位置が特定点Sとなる。図5(b)は、渋滞予測監視センタ10が渋滞開始点を特定点Sと特定する手順のフローチャート図を示す。
【0041】
渋滞予測監視センタ10は、監視カメラ13が撮影する画像から、通過した車両の位置と車速を分析する(S11)。ここでの撮影は、通過した車両のおよそ車速を判定できるものであればよいので、所定時間間隔で撮影して同じ車両が撮影されているか否か、撮影されている場合は走行距離と所定時間間隔に基づきおよその車速を算出する。
【0042】
渋滞予測監視センタ10は、通過した車両の車速が渋滞時の車速以下か否かを判定し(S12)、渋滞時の車速以下の場合(S12のYes)は渋滞していると判定し(S13)、渋滞時の車速以下でない場合(S12のNo)は渋滞していないと判定する(S14)。
【0043】
渋滞予測監視センタ10は、画像に撮影されている全ての車両についてステップS10〜S40の処理を繰り返す(S15)。このようにして渋滞予測監視センタ10は車速に基づき渋滞開始位置を特定する。
【0044】
そして、渋滞予測監視センタ10は、監視カメラ9によりステップS10とS40の処理を繰り返し、渋滞終了点も特定する(S16)。
【0045】
渋滞予測監視センタ10は、渋滞開始位置を特定点Sと特定する(S17)。
図5(a)にもどり、渋滞制御ECU40は、地上システム3から特定点Sを通知され、特定点Sの通知を受信した場合は(S10)、特定点Sを確定する(S20)。
【0046】
(S30,S40)
地上システム3から特定点Sを通知されない場合、他車両から特定点Sの通知を受ける。図6(a)は、渋滞制御ECU40が特定点Sを特定する手順のフローチャート図である。
【0047】
まず、渋滞制御ECU40は、地上システム3から隘路の通知を受信する(S31)。隘路の通知に含まれるおよその位置から渋滞制御ECU40は、近くに隘路があり渋滞が発生していることを検知するので、自車両の車速が渋滞時の車速以下か否かを判定する(S32)。渋滞時の車速以下でない場合(S32のNo)、まだ、渋滞開始位置に到達していないので所定距離走行するまで待機し(S33)、車速が渋滞時の車速以下か否かの判定を繰り返す。
【0048】
渋滞時の車速以下の場合(S32のYes)、渋滞制御ECU40は渋滞していると判定する(S34)。そして、最初に渋滞していると判定した位置を渋滞開始位置をとして、その位置を特定点Sに特定する(S35)。
【0049】
ついで、渋滞制御ECU40は、特定点S(=渋滞開始位置)を渋滞予測監視センタ10に通知する(S36)。そして、地上システム3から応答があるか否かを判定し(S37)、その特定点Sを特定点としてよいとの応答を受信した場合は特定点Sを確定する(S38)。地上システム3から応答がない場合、単に渋滞開始位置を他車両に通知する(S39)。
【0050】
図5(a)のステップS30に戻り、他車両からも特定点Sが通知されたか否か判定し(S30)、すでに隘路を通過した車両など、特定点Sを確定した他車両から路車間通信や車車間通信により特定点Sを取得する。
他車両から特定点Sの位置を取得する場合、複数の車両から特定点Sを受信すると考えられるので、渋滞制御ECU40は取得した複数の特定点Sの位置が一致する場合に(S40)、特定点Sを確定する(S50)。
(S60)
地上システム3又は他車両から特定点Sを取得できない場合、渋滞制御ECU40は自車両にて特定点Sを解析する(S60)。
【0051】
図6(b)は、渋滞制御ECU40が前方車両から特定点Sを特定する手順のフローチャート図である。
【0052】
渋滞制御ECU40は、前方カメラ31の画像から前方車両Pの位置と車速を分析する(S61)。渋滞制御ECU40は、前方車両Pの位置の変化を撮影される車体の大きさの変化から算出し、自車両の走行距離の変化と比較して前方車両Pの車速を算出する。
【0053】
そして、渋滞制御ECU40は前方車両Pの車速が渋滞時の車速以下か否かを判定する(S62)。渋滞時の車速以下でない場合(S62のNo)、まだ、渋滞開始位置に到達していないと判定し(S64)、前方車両Pの車速の算出を繰り返す。
【0054】
渋滞時の車速以下の場合(S62のYes)、渋滞制御ECU40は前方車両Pは渋滞を走行していると判定する(S63)。前方車両が複数ある場合は、渋滞制御ECU40は全ての前方車両Pについて渋滞を走行しているか否かの判定を繰り返す(S65)。
【0055】
渋滞制御ECU40は、すべての前方車両PについてステップS10〜40を繰り返し、渋滞開始位置を特定する(S66)。
【0056】
そして、渋滞制御ECU40は、渋滞開始位置を特定点Sと特定し、他車両に通知する(S67)。
【0057】
図5(a)のステップS70に戻り、以上のいずれかの方法で特定点Sを特定する(S70)。そして、渋滞制御ECU40は、地上システム3及び他車両に特定点Sを通知する(S80)。以上のようにして、特定点Sが特定され、地上システム3と車両で共有することができる。
【0058】
・優先順位
優先順位について説明する。渋滞演算制御部17bは、特定点Sに基づき車両の優先順位を決定する。一般車両については、通過時刻の早い順に優先順位が高くなる。例えば、図1では特定点Sの通過時刻は、車両A、B、Z、Cの順に早いので優先順位は、この順に車両Aの優先順位が1、車両Bが2、車両Zが3、車両Cが4となる。この優先順位に従い、各車両は隘路を通過することになる。なお、緊急車両が含まれている場合は、可能な限り高い優先順位を付与する。
【0059】
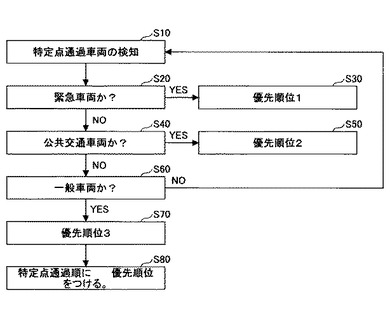
図7は、渋滞演算制御部17bが優先順位を決定する手順のフローチャート図を示す。渋滞演算制御部17bは、監視カメラ13又は通信装置14により特定点Sを車両が通過したことを検知する(S10)。
【0060】
そして、渋滞演算制御部17bは緊急車両情報があるか否か、又は、画像処理により車両が緊急車両か否かを判定し(S20)、緊急車両の場合には優先順位を1に決定する(S30)。
【0061】
緊急車両でない場合、渋滞演算制御部17bは公共交通車両か否かを判定する(S40)。公共交通車両か否かの情報は緊急車両情報に含まれている。また、当該車両が撮影された場所がバスレーンか否かにより判定してもよい。そして、公共交通車両の場合、渋滞演算制御部17bは優先順位を2に決定する(S50)。
【0062】
ついで、渋滞演算制御部17bは、緊急車両又は公共交通車両以外の一般車両であることを確認し(S60)、一般車両の優先順位を3に決定する(S70)。
【0063】
そして、渋滞演算制御部17bは、優先順位1、2、3が前後しないように保ち、優先順位1の車両の特定点Sの通過順、優先順位2の車両の特定点Sの通過順、及び、優先順位3の車両の特定点Sの通過順、に基づき最終的な優先順位を決定する(S80)。
【0064】
・推定通過時間
推定通過時間の推定について説明する。上記のように特定された特定点Sを通過したことを、通信装置14又は監視カメラ13が検出し、さらに隘路を通過したことを通信装置15又は監視カメラ9が検出するので、渋滞部通過情報生成部17cは、2地点の通過時間から、当該車両が特定点Sから隘路を通過するまでの通過時間を算出する。
【0065】
この通過時間は、渋滞部通過情報を受信する時点では過去の情報となるので、渋滞部通過情報生成部17cは、通過時間から推定通過時間を推定する。渋滞部通過情報生成部17cは、例えば、複数の車両の通過時間が単位時間にどの程度長くなっているか(又は短くなっているか)、特定点Sから隘路までの車両台数、平均車速、等に基づき推定通過時間を推定する。
【0066】
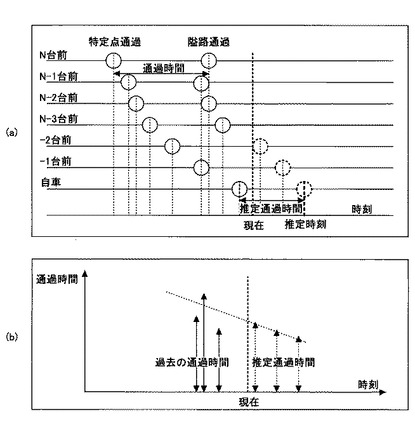
図8は、渋滞部通過情報生成部17cが推定通過時間を推定する手順のフローチャート図を、図9は推定通過時間の推定の説明図を示す。
【0067】
まず、渋滞部通過情報生成部17cは、通信装置14や監視カメラ13等により特定点Sを車両が通過したことを検知し(S10)、画像処理により認識された車両ナンバーに対応づけて通過時刻をメモリ18に記憶する(S20)。
【0068】
また、渋滞部通過情報生成部17cは、隘路を車両が通過したことを検知し(S30)、画像処理により認識された車両ナンバーに対応づけて通過時刻をメモリ18に記憶する(S40)。
【0069】
渋滞部通過情報生成部17cは、メモリ18から、特定点Sの通過時刻と隘路の通過時刻を車両ナンバー毎に抽出する(S50)。そして、「隘路の通過時刻−特定点Sの通過時刻」から通過時間を算出する(S60)。渋滞部通過情報生成部17cは、図9(a)に示したように、通過時間の算出を各車両毎に繰り返す(S70)。
【0070】
ついで、渋滞部通過情報生成部17cは、経過時間と通過時間の相関を計算する(S80)。図9(b)では、経過時間と過去の通過時間の関係を示しているが、通過時間は渋滞度に応じて変動するので、渋滞部通過情報生成部17cは経過時間と通過時間の相関(ここでは点線の傾き)を算出する。
【0071】
そして、渋滞部通過情報生成部17cは、現在の(最新の)車両の通過時間と相関に基づき、特定点Sから隘路までの推定通過時間を推定する(S90)。
【0072】
・隘路通過制御
隘路を通過する際の隊列制御について説明する。ここでは、片側2車線の道路の1車線が工事箇所11により通行できない場合を想定し、地上システム3は原則的に左右の車両が交互に隘路を通過するように各車両を制御する。
【0073】
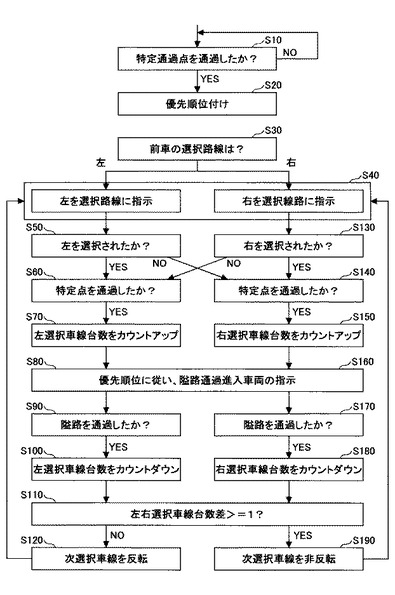
図10は、地上システム3が左右の車両を交互に隘路を通過させる手順のフローチャート図を示す。なお、図10では、特定点Sよりも手前の特定通過点を設けた。特定通過点は、特定点Sに到達するまでに減速して車線変更できる程度の距離(例えば、特定点Sから100m手前)である。
まず、渋滞予測監視センタ10は、通信装置14により車両が特定通過点を通過することを検出する(S10)。そして、渋滞演算制御部17bは、通過した車両に優先順位を付与する(S20)。
【0074】
ついで、渋滞予測監視センタ10は、1つ前の車両が左右の車線のどちらを走行したかを検知する(S30)。
【0075】
1つ前の車両が右車線を選択した場合、渋滞予測監視センタ10は当該車両に左車線を指示し(S40)、1つ前の車両が左車線を選択した場合、渋滞予測監視センタ10は当該車両に右車線を指示する(S40)。
【0076】
そして、渋滞予測監視センタ10は、当該車両が指示に車線を選択したか否かを判定する(S50、S130)。
【0077】
ステップS50において左車線を選択した場合はステップS60に進み、右車線を選択した場合はステップS140に進む。ステップS130において右車線を選択した場合はステップS60に進み、右車線を選択した場合はステップS140に進む。
【0078】
ついで、渋滞予測監視センタ10は、当該車両が特定点Sを通過したか否かを判定する(S60、S140)。特定点Sを通過したか否かは通信装置14や不図示の監視カメラにより検出される。
【0079】
特定点Sを通過した後は、隘路まで車線変更はしないものとしてそれぞれの車線を選択した車両の数をカウントアップする(S70、S150)。
【0080】
ついで、渋滞予測監視センタ10は、優先順位に従い、隘路を通過する車両を指示する(S80、S160)。すなわち、右車線の当該車両の方が優先順位が高ければ、右車線の当該車両に通過指示を送信し、左車線の当該車両には待機を指示する。また、左車線の当該車両の方が優先順位が高ければ、左車線の当該車両に通過指示を送信し、右車線の当該車両には待機を指示する。
【0081】
渋滞予測監視センタ10は、通過を指示した当該車両が隘路を通過したか否かを判定し(S90、S170)、左車線の車両が隘路を通過したら左車線を選択した車両の数をカウントダウンし(S100)、右車線の車両が隘路を通過したら右車線を選択した車両の数をカウントダウンする(S180)。
【0082】
そして、左右の車線を選択した車両の数を比較して、その差が1以上あるか否かを判定する(S110)。左右の車線を選択した車両の数が1以上でない場合(S110のNo)、渋滞予測監視センタ10は次の車両に指示する車線を反転し(S120)、左右の車線を選択した車両の数が1以上の場合(S110のYes)、渋滞予測監視センタ10は次の車両に指示する車線を反転しない(S190)。
【0083】
渋滞予測監視センタ10は、以上の処理を車両1台ごとに繰り返し、特定点Sの手前から左右に進む車両の数を均等にして、隘路の通過する車両に秩序を与えるので、渋滞している車両は左右均等に隊列を成し、左右交互に隘路を通過できるようになる。
【0084】
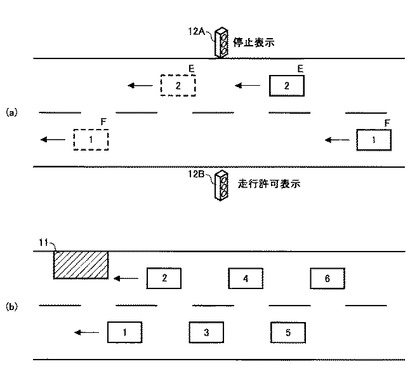
ところで、隊列の形成に信号機12A〜12Dを利用してもよい。信号機制御部17aは、優先順位のとおりに各車両が順番に隘路を通過するように信号機12A〜12Dを制御する。図1に示すように、信号機12A〜12Dは、右車線と左車線に1対に設けられ、1対の信号機12A・B、12C・Dは別々に停止表示、走行許可表示することができる。なお、右車線又は左車線のいずれかに1つの信号機を設け、1つの信号機で右車線と左車線の車両に対し別々に停止表示、走行許可表示してもよい。
【0085】
図11(a)は信号機12A〜12Dの点灯制御の一例を示す。図11(a)では車両Eの優先順位が2、車両Fの優先順位が1となっている。この場合、信号機制御部17aは、信号機12Aを停止表示、信号機12Bを走行許可表示する。車両Eが停止している間に車両Fは走行可能なので、点線で示した車両E,Fのように、隘路の手前で優先順位に従った走行順とすることができる。
【0086】
なお、1対の信号機12A、12Bの表示制御のタイミングは、監視カメラ13から信号機12A、12Bまでの距離及び推定通過時間(すなわち、平均的な車速)から決定できる。
【0087】
このような制御を信号機12A〜12Dに繰り返すことで、例えば図11(b)に示すように、優先順位に従い、複数の車両を所定の走行位置(例えば、F1のスターティンググリッド)に制御できる。図11(b)では左右の車線で互いに車両が完全には併走していないので、例えば、優先順位2の車両は優先順位3の車両の前に車線変更しやすく、優先順位4の車両は優先順位5の車両の前に車線変更しやすくなり、混乱なく隘路を走行可能となる。また、縦隊の隊列長も最小限にすることができ、結果的に隘路通過までの待ち時間を最小にすることができる。
【0088】
図11(b)のように隘路を1台ずつ通過させると時間がかかる場合があるので、片側の車線を連続して数台(5〜10台)ずつ通過させてもよい。
【0089】
・緊急車両の通過
図11(b)のように、隘路手前で車両が左右均等に隊列を成している場合等に、緊急車両が接近した場合には緊急車両を優先的に通過させる。したがって、渋滞予測監視センタ10は緊急車両よりも前方の車両に退避行動を取らせ、また、緊急車両が通過した後は、退避でできた空白地帯を速やかに詰めて後続車の割り込みを防止させ、各車両の通過時間の公平性が保たれるようにする。また、バスレーンのように公共交通が優先して走行すると定められた車線では、バスが接近した場合、一般車の進入を排除することが好ましい。
【0090】
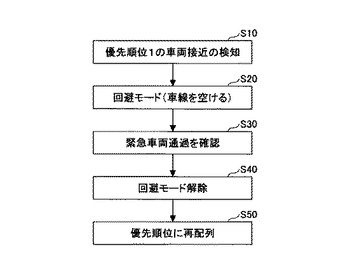
図12は、渋滞予測監視センタ10が緊急車両に隘路を優先的に通過させる手順のフローチャート図を示す。
【0091】
渋滞予測監視センタ10は、特定点Sに緊急車両の接近を検知する(S10)。渋滞予測監視センタ10は緊急車両情報により優先順位1の緊急車両が接近したことを検知すると、退避モードに入る(S20)。
【0092】
この退避モードでは、渋滞予測監視センタ10は、緊急車両よりも前方の一般車両に対し、退避を要求する。すなわち、左の車線の車両には左の路肩を利用して右車線側を空けるように指示し、右の車線の車両には右の路肩を利用して左車線側を空けるように指示する。例えば、車両のディスプレイ36には「緊急車両が接近しています、道路の中央側(右側又は左側)を空けてください」と表示される。退避モードにより2車線の中央付近が空くので、緊急車両は隘路まで渋滞の影響を受けずに通過できる。
【0093】
緊急車両の隘路の通過を検知すると(S30)、渋滞予測監視センタ10は退避モードを解除する(S40)。退避モードを解除する場合、渋滞予測監視センタ10は各車両に、元の走行位置に戻るよう指示する。これにより、優先順位に従って各社用は再度隊列を形成することができる。
【0094】
・渋滞走行中の最適なエンジン回転数の調整
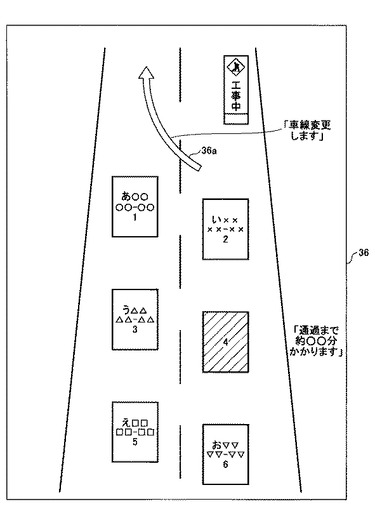
渋滞予測監視センタ10は、優先順位等の渋滞部通過情報を各車両に送信する。図13は渋滞制御ECU40がディスプレイ36に表示する渋滞部通過情報の一例を示す。図13では自車両を斜線で示し、前後の車両及び左車線の車両には車両ナンバーを表示した。渋滞制御ECU40は、工事箇所11がある車線には「車線変更します」というメッセージと車線変更矢印36aを表示するので、右車線の車両は車線変更する必要があることを把握できる。そして、自車両を含めた各車両には優先順位が表示されるので、自車両の運転者はどの車両の前に車線変更すればよいか、いつ車線変更すべきか(合流地点)を判断できる。また、推定通過時間により、渋滞制御ECU40は「通過まで約○○分かかります」等と表示するので、運転者は隘路までの通過時間を知り焦ることなく走行できる。渋滞部通過情報をこのようにビジュアルに表示することで運転者は一目で自車の位置、他車両との優先関係を把握できる。
【0095】
また、渋滞部通過情報に最適なエンジンの回転数を含めてもよい。渋滞では発電量が減少しバッテリが上がるおそれがあるのでこれを防止すると共に、消費電力のためオルタネータによる発電量を調整するよう、エンジン回転数を調整する。
【0096】
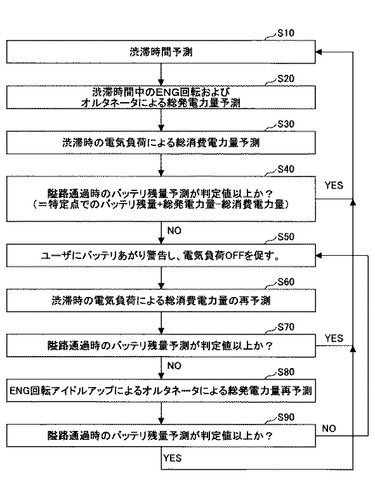
図14は、渋滞制御ECU40が最適なエンジン回転に調整する手順のフローチャート図を示す。
【0097】
まず、車両は、例えば特定点Sの通信装置14から推定通過時間を受信する(S10)。渋滞制御ECU40は、推定通過時間と車速に基づき、隘路を通過するまでの間のエンジン回転数とオルタネータによる総発電量を予測する(S20)。
【0098】
また、エアコンなどの車載装置の電気負荷に基づき、隘路を通過するまでの間の総消費電力を予測する(S30)。
【0099】
そして、渋滞制御ECU40は、隘路通過時のバッテリ残量予測が閾値以上か否かを判定する(S40)。例えば次の判定式で判定する。
【0100】
「特定点Sでのバッテリ残量+総発電量の和−総消費電力≧閾値」
閾値以上の場合、渋滞制御ECU40はステップS10から処理を繰り返し、渋滞が進むような場合には再度判定する。
【0101】
閾値以上でない場合、渋滞制御ECU40はバッテリ上がりのおそれがあるものとして、「バッテリ上がりのおそれがあります」などのメッセージを表示して、運転者に電気負荷をオフにするよう注意喚起する(S50)。
【0102】
このような注意喚起により総消費電力が低減すると期待されるので、渋滞制御ECU40は、再度、隘路通過時のバッテリ残量予測が閾値以上か否かを判定する(S60)。総消費電力が低減して、隘路通過時のバッテリ残量予測が閾値以上となればステップS10から処理を繰り返す。
【0103】
隘路通過時のバッテリ残量予測が閾値以上とならない場合、渋滞制御ECU40はエンジン回転数をアップし、アップ後の回転数による総発電量を再度予測する(S70)。そして、渋滞制御ECU40は、再度、隘路通過時のバッテリ残量予測が閾値以上か否かを判定する(S80)。
【0104】
隘路通過時のバッテリ残量予測が閾値以上とならない場合は、ステップS50からの処理を繰り返し、隘路通過時のバッテリ残量予測が閾値以上となればステップS10から処理を繰り返す(S90)。
【0105】
したがって、渋滞が生じても渋滞制御ECU40はバッテリ上がりを防止し、最適なエンジン回転数に保ち消費電力を低減できる。
【0106】
〔渋滞緩和システム1の制御手順〕
以上の構成を用いて、渋滞緩和システム1が複数の車両の隊列を制御し、渋滞部通過情報を車両に送信する制御手順について図15シーケンス図に基づき説明する。図15のシーケンス図は隘路がある場合に繰り返して実行される。
【0107】
地上システム3は、工事や事故による隘路の発生を常に収集しており、隘路が発生すると位置及びその車線と共に、上記のように特定点Sを特定しメモリ18に記憶している(S11)。
【0108】
また、車両は所定のサイクル時間毎に前後の車両の車両ナンバーを認識しており、常に最新の車両ナンバーをメモリに記憶している(S21)。なお、実施例2にて説明するように車両が隘路の位置を受信して、隘路を回避する経路を検索してもよい。
【0109】
そして、車両が通信エリアに入ると、渋滞予測監視センタ10からの要求に応じて、渋滞予測情報を渋滞予測監視センタ10に送信する(S22)。渋滞予測情報は、上述したように、自車位置情報、前後の車両の車両ナンバー及び自車両の車両ナンバー、特定点Sを通過した通過時刻、自車位置情報から判定される走行車線である。渋滞予測監視センタ10は、通信装置14により渋滞予測情報を受信し、送信した車両の車両ナンバーに対応づけてメモリ18に記憶する。なお、車両は、走行を所望する走行車線を渋滞予測監視センタ10に送信してもよい。
【0110】
そして、監視カメラ13を車両が通過すると、画像処理装置16により通過した車両の車両ナンバーを認識する(S12)。そして、画像処理装置16により認識される車両ナンバーによりメモリ18に記憶した渋滞予測情報を抽出し、走行車線が一致するか、前後の車両の車両ナンバーが一致するかなどにより、渋滞予測情報を送信した車両を照合する。
【0111】
ついで、渋滞演算制御部17bは、特定点Sの通過時刻、優先順位、各車両の好ましい走行車線を決定する(S13)。通過時刻は、例えば監視カメラ13が車両を撮影した撮影時刻又は通信装置14を通過した通過時刻であり、優先順位はこの通過時刻に基づき定められ、好ましい走行車線は、渋滞予測情報の走行車線又は所望された走行車線である。
【0112】
そして、渋滞部通過情報生成部17cは、渋滞部通過情報を生成する(S14)。渋滞部通過情報生成部17cは、ステップS13で決定した優先順位を車両ナンバーに対応づけると共に、車両毎に走行車線を決定する。また、渋滞部通過情報生成部17cは、すでに通信装置15を通過した車両の通過時間から推定通過時間を推定する。
【0113】
渋滞部通過情報が車両へ送信されると、渋滞予測制御装置20は渋滞部通過情報をディスプレイ36に表示する(S23)。渋滞制御ECU40は、推定通過時間に応じた目標アイドル回転数若しくはアイドル回転の停止を決定し、エンジンECU39にエンジン制御を要求し、また、減速が必要であればブレーキECU38に減速を要求する。
【0114】
また、渋滞予測監視センタ10の信号機制御部17aは、決定された優先順位に従い信号機12A〜12Dの表示を制御する(S15)。上述したように、1対の信号機12A,12Bで停止表示と走行許可表示を交互に切り替えたり、優先順位の高い車両に先に走行許可表示することで、車両の相対的な走行位置、隊列を制御できる。なお、信号機がない場合は、特定通過点で車両毎に走行車線を指示してもよい。
【0115】
そして、車両が通信装置15を通過するとその通過時刻から、渋滞演算制御部17bは当該車両の通過時間を利用して推定通過時間を修正する(S16)。これにより、常に推定通過時間の精度を保つことができる。
【0116】
以上説明したように、本実施例の渋滞緩和システム1は、隘路を通過する複数の車両の優先順位を決定し、各車両に送信するので複数の車両が互いにどの車両がどの順番で車線変更するかを把握でき、規律ある車線変更が可能となる。また、各車両の走行位置を優先順位に従い制御して隊列を決定するので、車線変更を容易にすることができる。運転者に優先順位を把握させ、車両の隊列も優先順位に従ったものとなることで、隊列長も最小限にでき割り込みよる乱れも抑制できるので、結果的に隘路の通過時間を最小にすることができる。
【実施例2】
【0117】
本実施例では、隘路発生時の経路選択、車線選択について説明する。なお、本実施例では適宜実施例1の構成を利用する。
【0118】
図16は、車両と隘路の関係の一例を示す。渋滞制御ECU40は、道路地図に目的地までの経路を設定しており、その経路上に隘路が発生している。本実施例の渋滞制御ECU40は、このような場合に経路通り進むのか、回避経路を選択するのかを判定し、また、適切な車線を運転者に指示することができる。
【0119】
例えば、図16(b)に示すように、片側3車線以上の道路を走行している場合であって、かつ、隘路が2車線以下の場合、車両は複数の車線を選択可能となる。しかしながら、車両を交互に左右の車線に割り振ると、隘路を通過した後に右折する車両を左車線に誘導する場合もあるため、好ましくない。そこで、取り得る車線のうち、目的地までの経路情報から隘路前後の情報を抽出し、車両にとって評価値の高い車線を運転者に指示する。なお、隘路の位置等は、通信装置14により車両に送信される。
【0120】
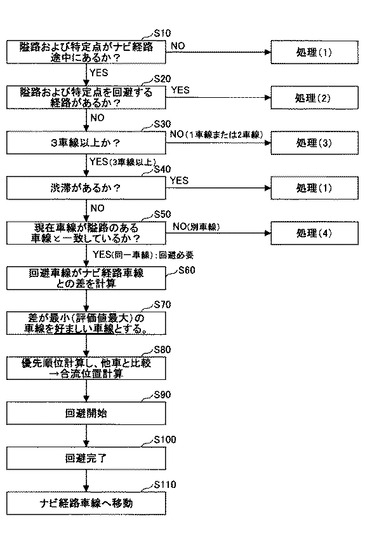
図17は、経路選択及び車線選択の処理手順を示すフローチャート図である。以下、図17に沿って説明する。
【0121】
(S10)
隘路及び特定点Sの位置が確定すると、渋滞制御ECU40は、隘路及び特定点Sが経路途中にあるか否かを判定する(S10)。そして、隘路及び特定点Sが経路途中にない場合(S10のYes)、処理(1)を実行する。
【0122】
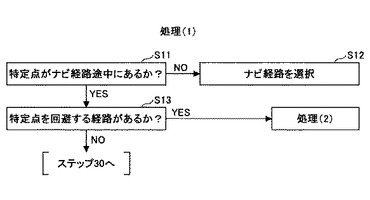
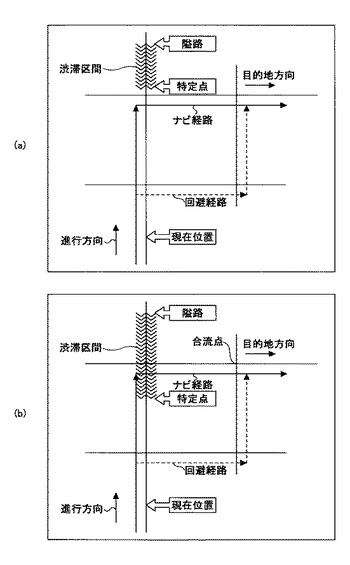
図18は処理(1)の手順を示すフローチャート図を、図19(a)は、特定点Sが経路に含まれない場合を、図19(b)は特定点Sが経路に含まれる場合を、それぞれ示す。
【0123】
渋滞制御ECU40は、特定点Sが経路上にあるか否かを判定する(S11)。特定点Sは、渋滞開始位置又は隘路手前の道路標識等であるので、特定点Sが経路に含まれていなければ、隘路による渋滞の影響を受けずに通過できると考えられる。
【0124】
したがって、図19(a)のように、特定点Sが隘路に含まれていなければ、渋滞制御ECU40は、ナビの経路をそのまま利用する(S12)。図19(b)のように、特定点Sが経路に含まれていれば、渋滞制御ECU40は、特定点Sを回避する経路があるか否かを判定する(S13)。
【0125】
そして、特定点Sを回避する経路があれば(S13のYes)、渋滞制御ECU40は処理(2)を実行する。後述するように、処理(2)では特定点Sを回避するか否かを判定する。
【0126】
特定点Sを回避する経路がなければ(S13のNo)、ステップS30の処理に進む。
【0127】
図20(a)は、処理(2)の処理手順を示すフローチャート図である。渋滞制御ECU40は、図19(b)のように特定点Sを回避する経路がある場合、元の経路を通過した方が早いのか特定点Sを回避した方が早いのかを判定する。
【0128】
渋滞制御ECU40は、特定点Sを通過し合流点まで走行した場合の所用推定時間A〔min〕を推定する(S21)。渋滞制御ECU40は、特定点Sの位置と推定通過時間から経路における渋滞部の通過時間を推定し、合流点までの所用推定時間Aを算出する。
【0129】
ついで、渋滞制御ECU40は、回避経路を通過し合流点まで走行した場合の所用推定時間B〔min〕を推定する(S22)。所用推定時間Bは、合流点までの距離により容易に算定される。
【0130】
そして、渋滞制御ECU40は、2つの所用推定時間A、Bを比較し、所用推定時間の短い経路を選択する(S23)。すなわち、A<B でない場合(S23のNo)、渋滞制御ECU40は回避経路を選択し(S24)、A<B の場合(S23のYes)、渋滞制御ECU40は特定点Sを通過する元の経路を選択する(S25)。
【0131】
元の特定点Sを通過する経路を選択した場合には図17のステップS30に戻る。
【0132】
(S20)
図17のステップS20に戻り、渋滞制御ECU40は隘路及び特定点Sを回避する経路があるか否かを判定する(S20)。隘路及び特定点Sを回避する経路がある場合(S20のYes)、渋滞制御ECU40は処理(2)を実行する。
【0133】
(S30)
図17のステップS30は、渋滞のある元の経路を選択した場合であるので、適切な車線を選択する処理となる。
【0134】
最適な車線を選択するため、渋滞制御ECU40は3車線以上か否かを判定する(S30)。1車線又は2車線であれば(S30のNo)、渋滞制御ECU40は処理(3)を実行する。
【0135】
図20(b)は、処理(3)の処理手順を示すフローチャート図である。処理(3)では、2車線かつ渋滞がない場合は、渋滞のない車線に車線変更する。なお、渋滞の有無は車速により判定され、渋滞のない場合とは大幅に減速又は停止せずに隘路を通過できる状態をいう。
【0136】
まず、渋滞制御ECU40は、2車線か否かを判定する(S31)。1車線の場合(S31のNo)は、対向車線と交互通行になる。1車線の場合には処理(5)にて説明する。
【0137】
2車線の場合(S31のYes)、渋滞制御ECU40は渋滞があるか否かを判定する(S32)。そして、渋滞がある場合は(S32のYes)、渋滞制御ECU40は処理(2)により経路を選択する。処理(2)では、合流点までの所用推定時間に応じて経路を選択する。
【0138】
渋滞がない場合は(S32のNo)、現在の走行車線と工事箇所11の車線が一致しているか否かを判定する(S33)。一致していない、すなわち別車線の場合は(S33のNo)、そのまま走行可能であるが、他車線からの合流が予想されるので処理(6)を実行する。
【0139】
現在の走行車線と工事箇所11の車線が一致する場合(S33のYes)、渋滞制御ECU40は、工事箇所11を回避するよう指示する(S34)。すなわち、工事箇所11のない車線へ車線変更するよう指示する。
【0140】
車線変更が終わり回避完了したら(S35)、渋滞制御ECU40は元の経路に戻るよう指示する(S36)。したがって、隘路を通過するために車線変更した場合でも、迅速に元の車線に戻ることができる。
【0141】
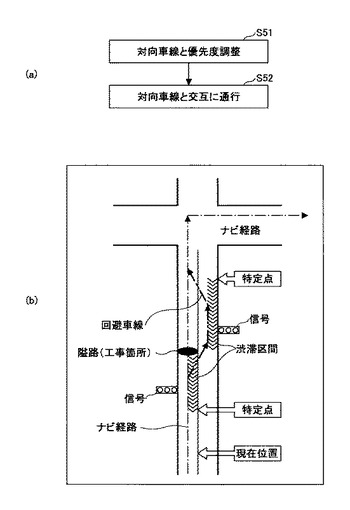
図21(a)は、処理(5)の処理手順を示すフローチャート図を、図21(b)は1車線に隘路がある道路の一例を示す。1つしかない進行方向の車線は工事箇所11により走行できないので、反対車線が隘路となり、反対車線は対向車両と交互に通行することになる。
【0142】
1車線の場合、渋滞予測監視センタ10は、走行車線だけでなく反対車線にも特定点Sを設定する。すなわち、反対車線も渋滞することが予想されるか渋滞が発生するため、
渋滞予測監視センタ10は、走行車線の特定点Sを通過した車両に優先順位を設定すると共に、反対車線の特定点Sを通過した車両に優先順位を設定し、それぞれの優先順位を各車両に送信する(S51)。例えば、走行車線の車両が通過すべきタイミングでは、走行車線の車両の優先順位は先頭から1〜Nとなり、対向車線の車両の優先順位はN+1〜となる。
【0143】
各車両の運転者は、表示された優先順位に従い、隘路を通過するか否かを決定するので、交互通行が実現できる(S52)。なお、走行車線と対向車線のうち渋滞の長い車線の車両に高い優先順位を設定することで、交通量の多い車線の渋滞を低減できる。
【0144】
図23は、処理(6)の処理手順を示すフローチャート図である。処理(6)は、2車線が渋滞しておらず、工事箇所11と走行車線とが一致していない場合の処理である。したがって、車両はそのまま走行することができる。しかしながら、工事箇所11のある他車線から自車線に車両が合流するおそれがあるので、渋滞予測監視センタ10が送信する優先順位に基づき走行位置を調整する(S61)。
【0145】
車両の運転者は優先順位に従い、他車線から車線変更する車両を自車両の前後に入るよう車速を調整、合流が完了する(S62)。
【0146】
(S40)
図17のステップS40に戻り、走行車線が3車線以上の場合の処理を説明する。3車線以上の場合、渋滞制御ECU40は渋滞があるか否かを判定する(S40)。渋滞がある場合は(S40のYes)、渋滞制御ECU40は処理(1)を実行する。
【0147】
(S50)
渋滞がない場合(S40のNo)、渋滞制御ECU40は、現在走行している車線と工事箇所11がある車線が一致するか否かを判定する(S50)。
【0148】
一致していない、すなわち別車線の場合は(S50のNo)、他車線からの合流が予想されるので処理(4)を実行する。
【0149】
処理(4)では、3車線以上の車線のいずれかを、工事箇所11と走行車線が一致しない状態で走行している場合である。図16(b)のように3車線のいずれかの車線に工事箇所11がある場合において、右車線に工事箇所11があり、車両は中央車線又は左車線を走行しているとする。したがって、車両はそのまま車線変更することなく、直進走行することができる。
【0150】
図22は、処理(4)の処理手順を示すフローチャート図である。
【0151】
渋滞制御ECU40は、まず、工事箇所11が隣接車線か否かを判定し(S41)、隣接車線でなければ、そのまま走行する(S42)。すなわち、工事箇所11のある車線と隣接していないため、工事箇所11のある車線の車両が自車線に合流するおそれも少なく、そのまま走行できる。
【0152】
工事箇所11が隣接車線の場合(S41のYes)、渋滞制御ECU40は、渋滞予測監視センタ10から送信される優先順位に従い、合流する車両があることを警告する(S43)。したがって、運転者は、優先順位に基づき合流してくる車両に注意しながら走行できる。
【0153】
(S60)
図17のステップS50に戻り、現在走行している車線と工事箇所11の車線が一致している場合(S50のYes)、回避する必要があるため、渋滞制御ECU40は回避車線と、元の経路との差を計算する(S60)。
【0154】
例えば、3車線の道路の右車線を走行している場合、中央線又は左車線と、ナビの経路との差を例えば車線数で数え、現在の走行車線から元の経路に戻るまで、トータルで何車線、車線変更するかを数える。
【0155】
(S70)
渋滞制御ECU40は、車線変更の数の最も少ない車線が好ましい(評価値最大の)車線とする(S70)。
【0156】
(S80)
車線が決定したので、実施例1と同様に、渋滞制御ECU40は渋滞予測監視センタ10から送信される優先順位に応じて合流位置を計算し、運転者に報知する(S80)。
【0157】
(S90、S100、S110)
運転者は優先順位及び合流位置を参照して車線変更することで工事箇所11の回避を開始(S90)、隘路を通過したら回避が完了する(S100)。隘路を通過した以降は、渋滞制御ECU40はナビの元の経路(車線)に戻るよう指示するので、運転者は元の経路に戻ることができる(S110)。以上で、図17の処理が終了する。
【0158】
本実施例によれば、ナビの設定した経路上に隘路又は渋滞が発生しても、回避経路を走行した場合の時間とナビの経路(渋滞)を走行した場合の所用推定時間を推定し、より早く目的地に到達する経路を決定することができる。
【0159】
また、回避経路の設定が困難な場合は、走行車線と工事箇所11の位置応じて適切な車線を指示することができる。合流が必要な場合、又は、他車線からの合流が予想される場合は、優先順位及び合流位置を表示するのでスムースに合流を完了させることができる。
【実施例3】
【0160】
実施例1では渋滞予測監視センタ10により優先順位を決定したが、本実施例では原則的に車両間で優先順位を決定し、車両間では優先順位の調整が困難な場合に渋滞予測監視センタ10に優先順位の調整を依頼する渋滞緩和システム1について説明する。
【0161】
図24は、渋滞緩和システム1が適用された道路及び車両の概略図を示す。なお、図24において図2と同一構成部分には同一の符号を付しその説明は省略する。本実施例の車両A〜Zの渋滞制御ECU40は、車両間で互いに通信する通信装置41を備え、車両A〜Zは、互いの車両情報を交換して優先順位を決定する。通信装置41は、前後の車両及び左右の車両とのみ通信する直進性の高い近赤外など光通信の通信装置であることが好ましく、送信部はLEDで受信部はフォトダイオードで構成されている。したがって、各車両は前後及び左右の所定部に送信部及び受光部を備える。
【0162】
そして、優先順位が決定できず渋滞予測監視センタ10に調整を依頼した場合には、渋滞予測監視センタ10が各車両の優先順位を決定する。
【0163】
図25は、渋滞予測制御装置20及び地上システム3から成る渋滞緩和システム1のブロック図を示す。なお、図25において図3と同一構成部分には同一の符号を付しその説明は省略する。本実施例の地上システム3は、監視カメラ13による撮影や信号機12A〜12Dの制御を必要とせず、通信装置14のみを備える。また、渋滞予測制御装置20の構成は実施例1と同様であるが、渋滞予測監視センタ10は優先順位調整部17dを、渋滞予測制御装置20は各車両間で優先順位を決定する優先順位決定部40aを有する点で実施例1と異なる。
【0164】
車両間における優先順位の決定について説明する。いずれかの車両(図24では車両A、X)が隘路を検出することで、優先順位決定部40aが優先順位の決定を開始する。隘路の検出は、例えば前方カメラ31により標識を撮影することで検出してもよいし、運転者が発見し所定のボタンを押下して渋滞予測制御装置20に入力してもよい。
【0165】
隘路が検出されると車両A、Xの渋滞予測制御装置20は隘路検出信号を同報的に車両B、C及び車両Y、Zに送信するので、隘路検出信号は車両間を次々と伝達される。各車両A〜Zの優先順位決定部40aは、走行車線と工事箇所11のある車線等に基づき優先順位を決定していく。例えば、次のような規則に従い優先順位決定部40aは優先順位を決定する。
a)同じ車線の車両では前方にある車両ほど優先順位が高くなる
b)隘路を通過直前の左右の車両では、工事箇所11のない車線の車両の方が優先順位が高い
各車線における隘路までの車両数は、通信に応答した車両数のうち、自車位置検出装置34により検出された同じ車線の車両数から検知される。また、先行車両が隘路を通過して前方の車両数が減少した場合も、通信に応答する車両数から各車線における隘路までの車両数が検知される。
【0166】
渋滞箇所11のない車線は先頭車両から隘路を通過でき、ついで、工事箇所11のある車線の車両が車線変更して隘路を通過する。一方の車線の車両が隘路を通過してその車線の車両数が少なくなると、車両数が少なくなった車線の車両の優先順位が1つずつ上がることになるので、基本的に左右の車線の車両が交互に隘路を通過できるようになる。
【0167】
図24では、車両Aと車両X)により車両Xの方が優先順位が高くなり、車両XとYではa)により車両Xの方が優先順位が高くなる。車両X、Aが通過したと仮定すると、車両B、Yについて同様に優先順位が決定でき、これを繰り返すことで後続する車両の優先順位を決定できる。
【0168】
なお、決定された優先順位は実施例1と同様にディスプレイ36に表示される。本実施例では、推定通過時間の算出は困難であるので推定通過時間の変わりに例えば車両数を表示する。
【0169】
車両間では優先順位が決定できない場合に、渋滞予測監視センタ10の優先順位調整部17dが調整する優先順位について説明する。上記のような規則が設けられていない場合や、優先順位が決定されてもそれを不満として自らのタイミングで車線変更する車両が多いため優先順位が安定しないような場合、渋滞制御ECU40は渋滞予測監視センタ10に優先順位の調整を依頼する。
【0170】
優先順位調整部17dは、依頼を受けて隘路の手前の車両A〜Zに優先順位を調整するための調整情報を送信させる。調整情報は、例えば、自車両より前方の車両数、走行車線、位置情報、緊急車両か否か、等である。渋滞予測監視センタ10は、調整情報に基づき、例えば上記の規則に従い優先順位を決定し、車両A〜Zへ送信する。なお、送信された優先順位は実施例1と同様にディスプレイ36に表示される。
【0171】
優先順位調整部17dが調整して決定した優先順位に強制力を持たせるため、優先順位が高い車両ほど大きい最大車速の走行を許可してもよい。制限された最大車速で走行すると、優先順位が高い車両ほど隘路に早く近づくことができ、優先順位に従った隊列とすることができる。また、優先順位を無視した割り込みも困難となる。
【0172】
したがって、本実施例によれば、車両間でのみ優先順位が決定できるので地上システム3の構成を簡易してコスト増を抑制できる。また、車両間では優先順位が決定できない場合には、渋滞予測監視センタ10により確実に優先順位を決定することができる。各車両の運転者は、どの車両がどの順番で車線変更するかを把握でき、規律ある車線変更が可能となる。運転者に優先順位を把握させることで、割り込みよる乱れも抑制できるので、結果的に隘路の通過時間を最小にすることができる。
【図面の簡単な説明】
【0173】
【図1】隘路と走行する車両を示す図である。
【図2】渋滞緩和システムが適用された道路及び車両の概略図である。
【図3】渋滞予測制御装置及び地上システムから成る渋滞緩和システムのブロック図である。
【図4】渋滞予測情報、渋滞部通過情報の一例を示す図である。
【図5】渋滞制御ECUが道路標識等を特定点Sに特定する手順のフローチャート図である。
【図6】渋滞制御ECUが道路標識等を特定点Sに特定する手順のフローチャート図である。
【図7】渋滞演算制御部が優先順位を決定する手順のフローチャート図である。
【図8】渋滞部通過情報生成部が推定通過時間を推定する手順のフローチャート図である。
【図9】推定通過時間の推定の説明図である。
【図10】地上システムが左右の車両を交互に隘路を通過させる手順のフローチャート図である。
【図11】信号機の点灯制御の一例を示す図である。
【図12】渋滞予測監視センタが緊急車両に隘路を優先的に通過させる手順のフローチャート図である。
【図13】渋滞制御ECUがディスプレイに表示する渋滞部通過情報の一例を示す図である。
【図14】渋滞制御ECUが最適なエンジン回転に調整する手順のフローチャート図である。
【図15】渋滞緩和システムが複数の車両の隊列を制御し、渋滞部通過情報を車両に送信する制御手順を示すシーケンス図である。
【図16】車両と隘路の関係の一例を示す図である。
【図17】経路選択及び車線選択の処理手順を示すフローチャート図である。
【図18】処理(1)の手順を示すフローチャート図である。
【図19】特定点Sと経路の関係の一例を示す図である。
【図20】処理(2)(3)の処理手順を示すフローチャート図である。
【図21】処理(5)の処理手順を示すフローチャート図と一車線に隘路がある道路の一例を示す図である。
【図22】処理(4)の処理手順を示すフローチャート図である。
【図23】処理(6)の処理手順を示すフローチャート図である。
【図24】渋滞緩和システムが適用された道路及び車両の概略図である。
【図25】渋滞予測制御装置及び地上システムから成る渋滞緩和システムのブロック図である。
【符号の説明】
【0174】
1 渋滞緩和システム
3 地上システム
10 渋滞予測監視センタ
11 工事箇所
12A〜12D 信号機
9、13 監視カメラ
14、15、35、41 通信装置
16、33 画像処理装置
17 サーバ
17a 信号機制御部
17b 渋滞演算制御部
17c 渋滞部通過情報生成部
17d 優先順位調整部
18 メモリ
20 渋滞予測制御装置
31 前方カメラ
32 後方カメラ
34 自車位置検出装置
36 ディスプレイ
37 スピーカ
38 ブレーキECU
39 エンジンECU
40 渋滞制御ECU
40a 優先順位決定部
【技術分野】
【0001】
本発明は、隘路などの渋滞を緩和する渋滞緩和システム、地上システム、渋滞予測制御装置に関する。
【背景技術】
【0002】
道路の合流や工事箇所などでは2車線が1車線になるなど車線数が減少する。この場合、他車線の車両と自車線の車両が1つの車線に合流したり、車線変更する必要があるなど、他車線の車両の位置を把握しながら自車両の操作が要求される。
【0003】
図1は、隘路と走行する車両を示す図である。図1では、右車線に工事箇所110があるため隘路が生じ、工事箇所110の手前から2車線が一時的に1車線となっている。工事箇所110ではその所定距離手前に道路標示120が設けられることが多く、道路標示120により工事箇所110の存在を把握した右車線の車両の運転者は、独自の判断及びタイミングで左車線に車線変更する。走行通過台数が比較的多い状態で車線の変更が行われると必然的にそれまでと同じ速度で走行することが困難になり、左車線さらには右車線においても渋滞が発生する。また、走行台数が多い状態では渋滞の隊列が長くなるため、やがては右車線から左車線への車線変更に割り込みが必要となる。割り込みをいつ行うか、又は、割り込みを受け入れるか否かは、各運転者の判断に任せられているため、割り込みする側の運転者と割り込まれる側の運転者の意識のずれなどにより接触事故が誘発されることもある。さらに渋滞の隊列が延びて交差点を跨ると、その交差点と直行する道路からの車両も割り込みせざるを得ないため、混乱が助長され渋滞が長期化する場合もある。
【0004】
割り込みの意志を伝えるため、車車間通信により自車の要求を他車に伝える技術が提案されている(例えば、特許文献1参照。)。特許文献1の技術によれば、車両が割り込み要請を送信し、割り込み要請を受信した他の車両の運転者が割り込み許可すると、元の車両に割り込み許可が送信される。したがって、割り込みする側の運転者と割り込まれる側の運転者のコミュニケーションが可能となり、円滑な合流が可能となるとしている。
【特許文献1】特開2004−118608号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1記載の技術は、割り込みする側と割り込まれる側の2車両間でのみ意思の疎通を図るものであるため、ある車両間で許可された割り込みが別の車両間の割り込みに影響を与え、混乱を生じさせる可能性がある。また、割り込みのタイミングや場所が各運転者の判断に任せられている点で従来と変わらないため、割り込み時に混乱するおそれもある。また、例えば図1で右車線の複数の車両が割り込み要求を送信すると、左車線の多くの車両が割り込み要求を受信することになり、左車線の車両の運転者はどの車両から割り込み要求があったのか判別することが困難である。
【0006】
本発明は、上記課題に鑑み、車線変更時の交通を統制して隘路通過時の渋滞を緩和する渋滞緩和システム、地上システム及び渋滞予測制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題に鑑み、本発明は、車載された渋滞予測制御装置と、複数の車両が通過する隘路の渋滞を緩和する地上システムと、を有する渋滞緩和システムにおいて、地上システムは、所定部(例えば、特定点S)を通過する車両の識別情報(例えば、車両ナンバー)を取得する第1の識別情報取得手段(例えば、通信装置14又は監視カメラ13)と、所定部を通過した第1通過時刻を取得する第1の通過時刻取得手段(例えば、通信装置14又は監視カメラ13)と、隘路を通過した車両の識別情報を取得する第2の識別情報取得手段(例えば、通信装置15又は監視カメラ9)と、隘路を通過した第2通過時刻を取得する第2の通過時刻取得手段(例えば、通信装置15又は監視カメラ9)と、第1取得時刻に基づき前記隘路を通過する各車両の優先順位を決定する渋滞演算制御部と、優先順位を各車両に送信する送信装置と、を有し、渋滞予測制御装置は、優先順位を受信する受信装置と、優先順位を乗員に報知する報知装置と、を有する、ことを特徴とする。
【0008】
本発明によれば、隘路の手前の複数の車両の優先順位を決定して、それを各車両の乗員に報知することができるので、複数の車両が、互いにどの車両がどの順番で車線変更するかを把握でき、不測の事態を防止できる。また、各車両の走行位置を優先順位に従い制御するので、割り込みによる乱れも抑制でき、結果的に隘路の通過時間を最小にすることができる。
【0009】
また、本発明の一形態において、渋滞演算制御部は、第1通過時刻と第2通過時刻に基づき所定部から隘路を通過するまでの推定通過時間を推定し、該推定通過時間を各車両に送信する、ことを特徴とする。
【0010】
本発明によれば、推定通過時間を各車両に送信することで、各車両の運転者は渋滞を通過するまでの時間を予測できる。
【0011】
また、本発明一形態において、 車線が複数の道路のいずれかの車線に隘路が発生した場合、渋滞演算制御部は、所定部を通過してから隘路までの所定区間において、左右の車線を走行する車両数が均等になるように、各車両に走行すべき車線情報を送信する、ことを特徴とする。
【0012】
本発明によれば、隘路まで左右の車線を走行する車両の数を均等にできるので、一方の車線に車両が偏ることなく、渋滞を緩和することができる。
【0013】
また、本発明の一形態において、地上システムは、所定部から隘路までに存在する信号機の表示を車線毎に制御する信号機制御部を有し、信号機制御部は、優先順位が高い車両を低い車両よりも早期に通過させ、優先順位の低い車両が高い車両よりも隘路側を走行する場合は低い車両を停止させるように、信号機の表示を制御する、ことを特徴とする。
【0014】
本発明によれば、信号機の表示により複数の車両の隊列が優先順位に従ったものとなるので、隊列長も最小限にでき、結果として渋滞を緩和できる。
【0015】
また、本発明の一形態において、渋滞予測制御装置は、車線変更しなければ隘路を通過できない場合、現在の車線から隘路を通過して予めナビが設定した経路に戻る場合の、車線の変更数が最小となる車線を好ましい車線として運転者に報知する、ことを特徴とする。
【0016】
本発明によれば、隘路を通過するために車線変更が必要な場合でも、ナビが設定した車線に最も戻りやすい車線を運転者に推奨することができる。
【発明の効果】
【0017】
車線変更時の交通を統制して隘路通過時の渋滞を緩和する渋滞緩和システム、地上システム及び渋滞予測制御装置を提供することができる。
【発明を実施するための最良の形態】
【0018】
以下、本発明を実施するための最良の形態について図面を参照しながら実施例を挙げて説明する。
【実施例1】
【0019】
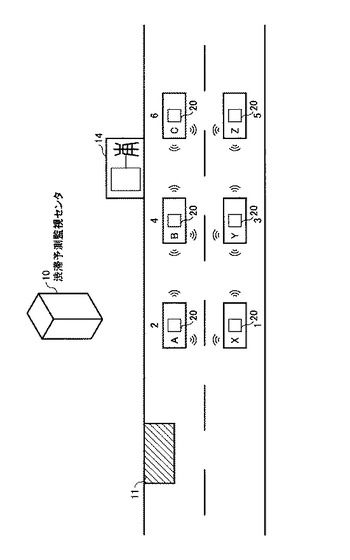
図2は、渋滞緩和システム1が適用された道路及び車両の概略図を示す。片側2車線の道路の右車線を車両A・B・Cが、左車線を車両X・Y・Z(以下、車両A〜Zを単に車両という場合がある)が走行しており、右車線に工事箇所11があり隘路となっている。隘路では2車線の車両が一車線に合流するため渋滞が予想される。渋滞予測監視センタ10は、隘路を通過するまで各車両に種々の情報を提供する。
【0020】
渋滞予測監視センタ10は通信装置14により、車載された渋滞予測制御装置20から車両の識別情報(車両ナンバー)、渋滞開始点等の特定点Sの通過時刻などを受信し、また監視カメラ13、9により車両のナンバーを撮影する。渋滞予測監視センタ10はそれらの情報に基づき隘路を通過する車両の優先順位や好ましい車線を決定し車両に送信することで、隘路の渋滞を緩和する。また、隘路手前に設置した信号機12A〜Dにより各車両の通過を制御することで、隘路を走行する車両の隊列を整える。
【0021】
また、渋滞予測監視センタ10は、通信装置15又は監視カメラ9により隘路を通過した車両の通過時刻等を受信するので、特定点Sから通信装置15又は監視カメラ9までの通過時間を元に、今後の推定通過時間を推定する。優先順位、好ましい車線及び推定通過時間は、通信装置14から各車両に送信され、車両のディスプレイに表示される。
【0022】
このような構成により、渋滞緩和システム1は、隘路の渋滞を予測すると共に、右車線の車両A・B・C及び左車線の車両X・Y・Zの隊列を制御でき、割り込みを極小にして隘路であっても快適に走行することを可能にする。また、各車両の運転者は優先順位、好ましい走行車線を把握して適切なタイミングで車線変更することができる。
【0023】
〔渋滞予測制御装置20〕
図3は、渋滞予測制御装置20及び地上システム3から成る渋滞緩和システム1のブロック図を示す。渋滞予測制御装置20は、種々のセンサ及び装置とCAN(Controller Area Network)及びLIN(Local Interconnect Network)等の車内LANを介して接続された渋滞制御ECU40により制御される。渋滞制御ECU40には、前方カメラ31、後方カメラ32と接続された画像処理装置33が接続されている。前方カメラ31は、車両前方の水平下向きに所定角範囲で広がる領域を撮影し、所定の輝度階調(例えば、256階調)のデジタル画像(以下、前方画像という)を出力する。前方カメラ31は例えば白線認識用のカメラと兼用することができる。後方カメラ32は、車両後方の水平下向きに所定角範囲で広がる領域を撮影し、所定の輝度階調のデジタル画像(以下、後方画像という)を出力する。後方カメラ32は例えば駐車支援用のカメラと兼用することができる。
【0024】
図1の車両Bの渋滞予測制御装置20の場合、前方画像には車両Bの先行車両A,後方画像には車両Bの後続車両C、のナンバープレートが撮影される。画像処理装置33は、前方画像及び後方画像それぞれを画像処理して車両ナンバーを認識する。画像処理装置33は、例えばナンバープレートが撮影される前方画像及び後方画像の下半分の領域から矩形領域をパターンマッチングなどにより抽出し、2値化処理の後、公知のOCR(Optical Charactor Reader)処理により車両ナンバーを認識する。
【0025】
渋滞制御ECU40に接続された自車位置検出装置34は、GPS(Global Positioning System)受信機の情報、車速センサ及びジャイロセンサの検出信号を利用して、自車両の位置を検出する。GPS受信機は複数のGPS衛星から受信した電波の到達時間から距離を演算することにより、自動車の位置(座標)を算出し、この位置に車速センサが検出する走行距離とジャイロセンサが検出する走行方位を累積して車両の走行経路を推定する自律航法により車両の現在位置を継続的に検出している。
【0026】
通信装置35は、渋滞予測情報を地上システム3に送信する。通信装置35と通信装置14、15は、DSRC(Dedicated Short Range Communication)、無線LAN、光ビーコン、電波ビーコン等により、狭域通信するための通信装置である。DSRCにより通信する場合、通信装置14はその前後の処理範囲において受信可能な電波を送信しており、所定以上の電波強度の通信エリアに入ると、通信装置14が要求する渋滞予測情報を送信する。
【0027】
図4(a)は渋滞予測情報の一例を示す。渋滞予測情報は、自車両の車両ナンバー、自車位置情報、前方車両の車両ナンバー、後続車両の車両ナンバー、及び、特定点Sを通過した通過時刻、自車位置情報から判定される走行車線である。渋滞制御ECU40は、通信エリアに入ると通信装置35により渋滞予測情報を渋滞予測監視センタ10に送信する。なお、前方車両の車両ナンバー、後続車両の車両ナンバーを送信するのは、多くの車両ナンバーにより情報の精度を向上させるためである。
【0028】
また、通信装置35は、通信装置15との通信エリアに入ると自車両の車両ナンバー、特定点Sの通過時刻を通信装置15に送信する。これらの情報により、渋滞予測監視センタ10は後述するように、以降の車両の推定通過時間を推定できるようになる。
【0029】
ところで、一般車両同士であれば、道路を走行する上での優先関係はほとんどないが、救急車、警察車両などの緊急車両、バスなどの公共車両は、一般車両よりも優先されるべき場合が多い。このような状況に備えるため、渋滞予測情報には、緊急車両であることを示す情報、及び、緊急車両の場合には緊急の程度を示す情報である緊急車両情報が含まれる。
【0030】
また、渋滞制御ECU40は、通信装置35により渋滞予測監視センタ10から渋滞部通過情報を受信する。図4(b)は渋滞部通過情報の一例を示す。渋滞部通過情報は、特定点Sから例えば隘路(正確には通信装置15又は監視カメラ9)を通過するまでに推定される推定通過時間、車両ナンバーに対応づけられた前後車両の優先順位、好ましい車線、工事箇所11の車線、等を含む。推定通過時間、優先順位及び好ましい車線については後述する。
【0031】
そして、ディスプレイ36及びスピーカ37は、渋滞部通過情報を車両の乗員に知らせるユーザインターフェイスとなる。推定通過時間、前後左右の車両の優先順位、好ましい車線、工事箇所11の車線、がディスプレイ36に表示され、また、音声がスピーカ37から出力されるので車両の乗員は渋滞部を通過するまでの推定時間、後方車両が優先されるか否か、自車線に工事箇所11があるか否かを知ることができる。
【0032】
渋滞制御ECU40は渋滞部通過情報に基づきブレーキECU38及びエンジンECU39を制御する。例えば、渋滞度が高いためしばらく走行できない場合には、エンジンECU39によりアイドル回転を停止する省燃費制御に移行し、エアコンなどの消費電力が大きいにも関わらずエンジン回転数が低い場合にはアイドル回転数を増大させてバッテリ残量を確保する。また、渋滞の手前を高速で走行している場合、渋滞制御ECU40はブレーキECU38に減速を要求する。これにより、例えば、渋滞に気づかずに渋滞部の最後尾の車両に誤って衝突することが防止できる。
【0033】
〔地上システム3〕
地上システム3は、渋滞予測監視センタ10により制御される。渋滞予測監視センタ10は、プログラムを実行するCPU、ハードディスクドライブとRAM(以下、両者を単にメモリ18という)、ROM、NIC(Network Interface Card)などが相互にバスで接続されたコンピュータを本体とするサーバ17により構成される。CPUがプログラムを実行することで、信号機制御部17a、渋滞演算制御部17b及び渋滞部通過情報生成部17cが実現される。
【0034】
通信装置14、15、監視カメラ9、13、信号機12A〜12Dは、道路に所定間隔又は所定の場所に設けられているため、その位置は固定されている。本実施形態では、通信装置14と監視カメラ13は隘路の手前であって特定点Sの前又は後に、信号機12A〜12Dは隘路(工事箇所11)の手前に、通信装置15と監視カメラ9は工事箇所11よりも後方にある。
【0035】
渋滞予測監視センタ10には、監視カメラ9、13と接続された画像処理装置16が接続されている。監視カメラ9、13は、路面から所定の高さに水平下向きの俯角をもって設けられ、所定角範囲で広がる領域を撮影し、所定の輝度階調(例えば、256階調)のデジタル画像(以下、道路画像という)を出力する。画像処理装置16は、車両の正面又は背面が撮影された道路画像から、画像処理装置33と同様に公知のOCR(Optical Character Reader)処理により車両ナンバーを認識する。
【0036】
車両から送信された特定点Sを通過した通過時刻はメモリ18に記憶される。また、監視カメラ9により車両ナンバーが認識された車両はその撮影時刻、隘路を通過した通過時刻、をメモリ18に記憶してもよい。渋滞部通過情報生成部17cは、2地点間を通過した通過時間に基づき隘路を通過するまでの推定通過時間を推定する。
【0037】
また、通信装置14は、車両から渋滞予測情報を受信し、また、渋滞部通過情報を車両に送信する。通信装置15は、車両ナンバー、通過時刻を車両から受信する。
【0038】
・特定点S
特定点Sの特定について説明する。特定点Sは例えば渋滞開始点であり、渋滞が生じていない場合は隘路の存在を示す道路標識や路上表示の位置、又は、監視カメラ13や通信装置14の位置である。
【0039】
図5(a)は、渋滞制御ECU40が道路標識等を特定点Sに特定する手順のフローチャート図を示し、図5(b)は図5(a)のステップS10のフローチャート図、図6(a)はステップS30のフローチャート図、図6(b)はステップS60のフローチャート図をそれぞれ示す。
【0040】
(S10、S20)
地上システム3が特定点Sの位置を把握している場合、その位置が特定点Sとなる。図5(b)は、渋滞予測監視センタ10が渋滞開始点を特定点Sと特定する手順のフローチャート図を示す。
【0041】
渋滞予測監視センタ10は、監視カメラ13が撮影する画像から、通過した車両の位置と車速を分析する(S11)。ここでの撮影は、通過した車両のおよそ車速を判定できるものであればよいので、所定時間間隔で撮影して同じ車両が撮影されているか否か、撮影されている場合は走行距離と所定時間間隔に基づきおよその車速を算出する。
【0042】
渋滞予測監視センタ10は、通過した車両の車速が渋滞時の車速以下か否かを判定し(S12)、渋滞時の車速以下の場合(S12のYes)は渋滞していると判定し(S13)、渋滞時の車速以下でない場合(S12のNo)は渋滞していないと判定する(S14)。
【0043】
渋滞予測監視センタ10は、画像に撮影されている全ての車両についてステップS10〜S40の処理を繰り返す(S15)。このようにして渋滞予測監視センタ10は車速に基づき渋滞開始位置を特定する。
【0044】
そして、渋滞予測監視センタ10は、監視カメラ9によりステップS10とS40の処理を繰り返し、渋滞終了点も特定する(S16)。
【0045】
渋滞予測監視センタ10は、渋滞開始位置を特定点Sと特定する(S17)。
図5(a)にもどり、渋滞制御ECU40は、地上システム3から特定点Sを通知され、特定点Sの通知を受信した場合は(S10)、特定点Sを確定する(S20)。
【0046】
(S30,S40)
地上システム3から特定点Sを通知されない場合、他車両から特定点Sの通知を受ける。図6(a)は、渋滞制御ECU40が特定点Sを特定する手順のフローチャート図である。
【0047】
まず、渋滞制御ECU40は、地上システム3から隘路の通知を受信する(S31)。隘路の通知に含まれるおよその位置から渋滞制御ECU40は、近くに隘路があり渋滞が発生していることを検知するので、自車両の車速が渋滞時の車速以下か否かを判定する(S32)。渋滞時の車速以下でない場合(S32のNo)、まだ、渋滞開始位置に到達していないので所定距離走行するまで待機し(S33)、車速が渋滞時の車速以下か否かの判定を繰り返す。
【0048】
渋滞時の車速以下の場合(S32のYes)、渋滞制御ECU40は渋滞していると判定する(S34)。そして、最初に渋滞していると判定した位置を渋滞開始位置をとして、その位置を特定点Sに特定する(S35)。
【0049】
ついで、渋滞制御ECU40は、特定点S(=渋滞開始位置)を渋滞予測監視センタ10に通知する(S36)。そして、地上システム3から応答があるか否かを判定し(S37)、その特定点Sを特定点としてよいとの応答を受信した場合は特定点Sを確定する(S38)。地上システム3から応答がない場合、単に渋滞開始位置を他車両に通知する(S39)。
【0050】
図5(a)のステップS30に戻り、他車両からも特定点Sが通知されたか否か判定し(S30)、すでに隘路を通過した車両など、特定点Sを確定した他車両から路車間通信や車車間通信により特定点Sを取得する。
他車両から特定点Sの位置を取得する場合、複数の車両から特定点Sを受信すると考えられるので、渋滞制御ECU40は取得した複数の特定点Sの位置が一致する場合に(S40)、特定点Sを確定する(S50)。
(S60)
地上システム3又は他車両から特定点Sを取得できない場合、渋滞制御ECU40は自車両にて特定点Sを解析する(S60)。
【0051】
図6(b)は、渋滞制御ECU40が前方車両から特定点Sを特定する手順のフローチャート図である。
【0052】
渋滞制御ECU40は、前方カメラ31の画像から前方車両Pの位置と車速を分析する(S61)。渋滞制御ECU40は、前方車両Pの位置の変化を撮影される車体の大きさの変化から算出し、自車両の走行距離の変化と比較して前方車両Pの車速を算出する。
【0053】
そして、渋滞制御ECU40は前方車両Pの車速が渋滞時の車速以下か否かを判定する(S62)。渋滞時の車速以下でない場合(S62のNo)、まだ、渋滞開始位置に到達していないと判定し(S64)、前方車両Pの車速の算出を繰り返す。
【0054】
渋滞時の車速以下の場合(S62のYes)、渋滞制御ECU40は前方車両Pは渋滞を走行していると判定する(S63)。前方車両が複数ある場合は、渋滞制御ECU40は全ての前方車両Pについて渋滞を走行しているか否かの判定を繰り返す(S65)。
【0055】
渋滞制御ECU40は、すべての前方車両PについてステップS10〜40を繰り返し、渋滞開始位置を特定する(S66)。
【0056】
そして、渋滞制御ECU40は、渋滞開始位置を特定点Sと特定し、他車両に通知する(S67)。
【0057】
図5(a)のステップS70に戻り、以上のいずれかの方法で特定点Sを特定する(S70)。そして、渋滞制御ECU40は、地上システム3及び他車両に特定点Sを通知する(S80)。以上のようにして、特定点Sが特定され、地上システム3と車両で共有することができる。
【0058】
・優先順位
優先順位について説明する。渋滞演算制御部17bは、特定点Sに基づき車両の優先順位を決定する。一般車両については、通過時刻の早い順に優先順位が高くなる。例えば、図1では特定点Sの通過時刻は、車両A、B、Z、Cの順に早いので優先順位は、この順に車両Aの優先順位が1、車両Bが2、車両Zが3、車両Cが4となる。この優先順位に従い、各車両は隘路を通過することになる。なお、緊急車両が含まれている場合は、可能な限り高い優先順位を付与する。
【0059】
図7は、渋滞演算制御部17bが優先順位を決定する手順のフローチャート図を示す。渋滞演算制御部17bは、監視カメラ13又は通信装置14により特定点Sを車両が通過したことを検知する(S10)。
【0060】
そして、渋滞演算制御部17bは緊急車両情報があるか否か、又は、画像処理により車両が緊急車両か否かを判定し(S20)、緊急車両の場合には優先順位を1に決定する(S30)。
【0061】
緊急車両でない場合、渋滞演算制御部17bは公共交通車両か否かを判定する(S40)。公共交通車両か否かの情報は緊急車両情報に含まれている。また、当該車両が撮影された場所がバスレーンか否かにより判定してもよい。そして、公共交通車両の場合、渋滞演算制御部17bは優先順位を2に決定する(S50)。
【0062】
ついで、渋滞演算制御部17bは、緊急車両又は公共交通車両以外の一般車両であることを確認し(S60)、一般車両の優先順位を3に決定する(S70)。
【0063】
そして、渋滞演算制御部17bは、優先順位1、2、3が前後しないように保ち、優先順位1の車両の特定点Sの通過順、優先順位2の車両の特定点Sの通過順、及び、優先順位3の車両の特定点Sの通過順、に基づき最終的な優先順位を決定する(S80)。
【0064】
・推定通過時間
推定通過時間の推定について説明する。上記のように特定された特定点Sを通過したことを、通信装置14又は監視カメラ13が検出し、さらに隘路を通過したことを通信装置15又は監視カメラ9が検出するので、渋滞部通過情報生成部17cは、2地点の通過時間から、当該車両が特定点Sから隘路を通過するまでの通過時間を算出する。
【0065】
この通過時間は、渋滞部通過情報を受信する時点では過去の情報となるので、渋滞部通過情報生成部17cは、通過時間から推定通過時間を推定する。渋滞部通過情報生成部17cは、例えば、複数の車両の通過時間が単位時間にどの程度長くなっているか(又は短くなっているか)、特定点Sから隘路までの車両台数、平均車速、等に基づき推定通過時間を推定する。
【0066】
図8は、渋滞部通過情報生成部17cが推定通過時間を推定する手順のフローチャート図を、図9は推定通過時間の推定の説明図を示す。
【0067】
まず、渋滞部通過情報生成部17cは、通信装置14や監視カメラ13等により特定点Sを車両が通過したことを検知し(S10)、画像処理により認識された車両ナンバーに対応づけて通過時刻をメモリ18に記憶する(S20)。
【0068】
また、渋滞部通過情報生成部17cは、隘路を車両が通過したことを検知し(S30)、画像処理により認識された車両ナンバーに対応づけて通過時刻をメモリ18に記憶する(S40)。
【0069】
渋滞部通過情報生成部17cは、メモリ18から、特定点Sの通過時刻と隘路の通過時刻を車両ナンバー毎に抽出する(S50)。そして、「隘路の通過時刻−特定点Sの通過時刻」から通過時間を算出する(S60)。渋滞部通過情報生成部17cは、図9(a)に示したように、通過時間の算出を各車両毎に繰り返す(S70)。
【0070】
ついで、渋滞部通過情報生成部17cは、経過時間と通過時間の相関を計算する(S80)。図9(b)では、経過時間と過去の通過時間の関係を示しているが、通過時間は渋滞度に応じて変動するので、渋滞部通過情報生成部17cは経過時間と通過時間の相関(ここでは点線の傾き)を算出する。
【0071】
そして、渋滞部通過情報生成部17cは、現在の(最新の)車両の通過時間と相関に基づき、特定点Sから隘路までの推定通過時間を推定する(S90)。
【0072】
・隘路通過制御
隘路を通過する際の隊列制御について説明する。ここでは、片側2車線の道路の1車線が工事箇所11により通行できない場合を想定し、地上システム3は原則的に左右の車両が交互に隘路を通過するように各車両を制御する。
【0073】
図10は、地上システム3が左右の車両を交互に隘路を通過させる手順のフローチャート図を示す。なお、図10では、特定点Sよりも手前の特定通過点を設けた。特定通過点は、特定点Sに到達するまでに減速して車線変更できる程度の距離(例えば、特定点Sから100m手前)である。
まず、渋滞予測監視センタ10は、通信装置14により車両が特定通過点を通過することを検出する(S10)。そして、渋滞演算制御部17bは、通過した車両に優先順位を付与する(S20)。
【0074】
ついで、渋滞予測監視センタ10は、1つ前の車両が左右の車線のどちらを走行したかを検知する(S30)。
【0075】
1つ前の車両が右車線を選択した場合、渋滞予測監視センタ10は当該車両に左車線を指示し(S40)、1つ前の車両が左車線を選択した場合、渋滞予測監視センタ10は当該車両に右車線を指示する(S40)。
【0076】
そして、渋滞予測監視センタ10は、当該車両が指示に車線を選択したか否かを判定する(S50、S130)。
【0077】
ステップS50において左車線を選択した場合はステップS60に進み、右車線を選択した場合はステップS140に進む。ステップS130において右車線を選択した場合はステップS60に進み、右車線を選択した場合はステップS140に進む。
【0078】
ついで、渋滞予測監視センタ10は、当該車両が特定点Sを通過したか否かを判定する(S60、S140)。特定点Sを通過したか否かは通信装置14や不図示の監視カメラにより検出される。
【0079】
特定点Sを通過した後は、隘路まで車線変更はしないものとしてそれぞれの車線を選択した車両の数をカウントアップする(S70、S150)。
【0080】
ついで、渋滞予測監視センタ10は、優先順位に従い、隘路を通過する車両を指示する(S80、S160)。すなわち、右車線の当該車両の方が優先順位が高ければ、右車線の当該車両に通過指示を送信し、左車線の当該車両には待機を指示する。また、左車線の当該車両の方が優先順位が高ければ、左車線の当該車両に通過指示を送信し、右車線の当該車両には待機を指示する。
【0081】
渋滞予測監視センタ10は、通過を指示した当該車両が隘路を通過したか否かを判定し(S90、S170)、左車線の車両が隘路を通過したら左車線を選択した車両の数をカウントダウンし(S100)、右車線の車両が隘路を通過したら右車線を選択した車両の数をカウントダウンする(S180)。
【0082】
そして、左右の車線を選択した車両の数を比較して、その差が1以上あるか否かを判定する(S110)。左右の車線を選択した車両の数が1以上でない場合(S110のNo)、渋滞予測監視センタ10は次の車両に指示する車線を反転し(S120)、左右の車線を選択した車両の数が1以上の場合(S110のYes)、渋滞予測監視センタ10は次の車両に指示する車線を反転しない(S190)。
【0083】
渋滞予測監視センタ10は、以上の処理を車両1台ごとに繰り返し、特定点Sの手前から左右に進む車両の数を均等にして、隘路の通過する車両に秩序を与えるので、渋滞している車両は左右均等に隊列を成し、左右交互に隘路を通過できるようになる。
【0084】
ところで、隊列の形成に信号機12A〜12Dを利用してもよい。信号機制御部17aは、優先順位のとおりに各車両が順番に隘路を通過するように信号機12A〜12Dを制御する。図1に示すように、信号機12A〜12Dは、右車線と左車線に1対に設けられ、1対の信号機12A・B、12C・Dは別々に停止表示、走行許可表示することができる。なお、右車線又は左車線のいずれかに1つの信号機を設け、1つの信号機で右車線と左車線の車両に対し別々に停止表示、走行許可表示してもよい。
【0085】
図11(a)は信号機12A〜12Dの点灯制御の一例を示す。図11(a)では車両Eの優先順位が2、車両Fの優先順位が1となっている。この場合、信号機制御部17aは、信号機12Aを停止表示、信号機12Bを走行許可表示する。車両Eが停止している間に車両Fは走行可能なので、点線で示した車両E,Fのように、隘路の手前で優先順位に従った走行順とすることができる。
【0086】
なお、1対の信号機12A、12Bの表示制御のタイミングは、監視カメラ13から信号機12A、12Bまでの距離及び推定通過時間(すなわち、平均的な車速)から決定できる。
【0087】
このような制御を信号機12A〜12Dに繰り返すことで、例えば図11(b)に示すように、優先順位に従い、複数の車両を所定の走行位置(例えば、F1のスターティンググリッド)に制御できる。図11(b)では左右の車線で互いに車両が完全には併走していないので、例えば、優先順位2の車両は優先順位3の車両の前に車線変更しやすく、優先順位4の車両は優先順位5の車両の前に車線変更しやすくなり、混乱なく隘路を走行可能となる。また、縦隊の隊列長も最小限にすることができ、結果的に隘路通過までの待ち時間を最小にすることができる。
【0088】
図11(b)のように隘路を1台ずつ通過させると時間がかかる場合があるので、片側の車線を連続して数台(5〜10台)ずつ通過させてもよい。
【0089】
・緊急車両の通過
図11(b)のように、隘路手前で車両が左右均等に隊列を成している場合等に、緊急車両が接近した場合には緊急車両を優先的に通過させる。したがって、渋滞予測監視センタ10は緊急車両よりも前方の車両に退避行動を取らせ、また、緊急車両が通過した後は、退避でできた空白地帯を速やかに詰めて後続車の割り込みを防止させ、各車両の通過時間の公平性が保たれるようにする。また、バスレーンのように公共交通が優先して走行すると定められた車線では、バスが接近した場合、一般車の進入を排除することが好ましい。
【0090】
図12は、渋滞予測監視センタ10が緊急車両に隘路を優先的に通過させる手順のフローチャート図を示す。
【0091】
渋滞予測監視センタ10は、特定点Sに緊急車両の接近を検知する(S10)。渋滞予測監視センタ10は緊急車両情報により優先順位1の緊急車両が接近したことを検知すると、退避モードに入る(S20)。
【0092】
この退避モードでは、渋滞予測監視センタ10は、緊急車両よりも前方の一般車両に対し、退避を要求する。すなわち、左の車線の車両には左の路肩を利用して右車線側を空けるように指示し、右の車線の車両には右の路肩を利用して左車線側を空けるように指示する。例えば、車両のディスプレイ36には「緊急車両が接近しています、道路の中央側(右側又は左側)を空けてください」と表示される。退避モードにより2車線の中央付近が空くので、緊急車両は隘路まで渋滞の影響を受けずに通過できる。
【0093】
緊急車両の隘路の通過を検知すると(S30)、渋滞予測監視センタ10は退避モードを解除する(S40)。退避モードを解除する場合、渋滞予測監視センタ10は各車両に、元の走行位置に戻るよう指示する。これにより、優先順位に従って各社用は再度隊列を形成することができる。
【0094】
・渋滞走行中の最適なエンジン回転数の調整
渋滞予測監視センタ10は、優先順位等の渋滞部通過情報を各車両に送信する。図13は渋滞制御ECU40がディスプレイ36に表示する渋滞部通過情報の一例を示す。図13では自車両を斜線で示し、前後の車両及び左車線の車両には車両ナンバーを表示した。渋滞制御ECU40は、工事箇所11がある車線には「車線変更します」というメッセージと車線変更矢印36aを表示するので、右車線の車両は車線変更する必要があることを把握できる。そして、自車両を含めた各車両には優先順位が表示されるので、自車両の運転者はどの車両の前に車線変更すればよいか、いつ車線変更すべきか(合流地点)を判断できる。また、推定通過時間により、渋滞制御ECU40は「通過まで約○○分かかります」等と表示するので、運転者は隘路までの通過時間を知り焦ることなく走行できる。渋滞部通過情報をこのようにビジュアルに表示することで運転者は一目で自車の位置、他車両との優先関係を把握できる。
【0095】
また、渋滞部通過情報に最適なエンジンの回転数を含めてもよい。渋滞では発電量が減少しバッテリが上がるおそれがあるのでこれを防止すると共に、消費電力のためオルタネータによる発電量を調整するよう、エンジン回転数を調整する。
【0096】
図14は、渋滞制御ECU40が最適なエンジン回転に調整する手順のフローチャート図を示す。
【0097】
まず、車両は、例えば特定点Sの通信装置14から推定通過時間を受信する(S10)。渋滞制御ECU40は、推定通過時間と車速に基づき、隘路を通過するまでの間のエンジン回転数とオルタネータによる総発電量を予測する(S20)。
【0098】
また、エアコンなどの車載装置の電気負荷に基づき、隘路を通過するまでの間の総消費電力を予測する(S30)。
【0099】
そして、渋滞制御ECU40は、隘路通過時のバッテリ残量予測が閾値以上か否かを判定する(S40)。例えば次の判定式で判定する。
【0100】
「特定点Sでのバッテリ残量+総発電量の和−総消費電力≧閾値」
閾値以上の場合、渋滞制御ECU40はステップS10から処理を繰り返し、渋滞が進むような場合には再度判定する。
【0101】
閾値以上でない場合、渋滞制御ECU40はバッテリ上がりのおそれがあるものとして、「バッテリ上がりのおそれがあります」などのメッセージを表示して、運転者に電気負荷をオフにするよう注意喚起する(S50)。
【0102】
このような注意喚起により総消費電力が低減すると期待されるので、渋滞制御ECU40は、再度、隘路通過時のバッテリ残量予測が閾値以上か否かを判定する(S60)。総消費電力が低減して、隘路通過時のバッテリ残量予測が閾値以上となればステップS10から処理を繰り返す。
【0103】
隘路通過時のバッテリ残量予測が閾値以上とならない場合、渋滞制御ECU40はエンジン回転数をアップし、アップ後の回転数による総発電量を再度予測する(S70)。そして、渋滞制御ECU40は、再度、隘路通過時のバッテリ残量予測が閾値以上か否かを判定する(S80)。
【0104】
隘路通過時のバッテリ残量予測が閾値以上とならない場合は、ステップS50からの処理を繰り返し、隘路通過時のバッテリ残量予測が閾値以上となればステップS10から処理を繰り返す(S90)。
【0105】
したがって、渋滞が生じても渋滞制御ECU40はバッテリ上がりを防止し、最適なエンジン回転数に保ち消費電力を低減できる。
【0106】
〔渋滞緩和システム1の制御手順〕
以上の構成を用いて、渋滞緩和システム1が複数の車両の隊列を制御し、渋滞部通過情報を車両に送信する制御手順について図15シーケンス図に基づき説明する。図15のシーケンス図は隘路がある場合に繰り返して実行される。
【0107】
地上システム3は、工事や事故による隘路の発生を常に収集しており、隘路が発生すると位置及びその車線と共に、上記のように特定点Sを特定しメモリ18に記憶している(S11)。
【0108】
また、車両は所定のサイクル時間毎に前後の車両の車両ナンバーを認識しており、常に最新の車両ナンバーをメモリに記憶している(S21)。なお、実施例2にて説明するように車両が隘路の位置を受信して、隘路を回避する経路を検索してもよい。
【0109】
そして、車両が通信エリアに入ると、渋滞予測監視センタ10からの要求に応じて、渋滞予測情報を渋滞予測監視センタ10に送信する(S22)。渋滞予測情報は、上述したように、自車位置情報、前後の車両の車両ナンバー及び自車両の車両ナンバー、特定点Sを通過した通過時刻、自車位置情報から判定される走行車線である。渋滞予測監視センタ10は、通信装置14により渋滞予測情報を受信し、送信した車両の車両ナンバーに対応づけてメモリ18に記憶する。なお、車両は、走行を所望する走行車線を渋滞予測監視センタ10に送信してもよい。
【0110】
そして、監視カメラ13を車両が通過すると、画像処理装置16により通過した車両の車両ナンバーを認識する(S12)。そして、画像処理装置16により認識される車両ナンバーによりメモリ18に記憶した渋滞予測情報を抽出し、走行車線が一致するか、前後の車両の車両ナンバーが一致するかなどにより、渋滞予測情報を送信した車両を照合する。
【0111】
ついで、渋滞演算制御部17bは、特定点Sの通過時刻、優先順位、各車両の好ましい走行車線を決定する(S13)。通過時刻は、例えば監視カメラ13が車両を撮影した撮影時刻又は通信装置14を通過した通過時刻であり、優先順位はこの通過時刻に基づき定められ、好ましい走行車線は、渋滞予測情報の走行車線又は所望された走行車線である。
【0112】
そして、渋滞部通過情報生成部17cは、渋滞部通過情報を生成する(S14)。渋滞部通過情報生成部17cは、ステップS13で決定した優先順位を車両ナンバーに対応づけると共に、車両毎に走行車線を決定する。また、渋滞部通過情報生成部17cは、すでに通信装置15を通過した車両の通過時間から推定通過時間を推定する。
【0113】
渋滞部通過情報が車両へ送信されると、渋滞予測制御装置20は渋滞部通過情報をディスプレイ36に表示する(S23)。渋滞制御ECU40は、推定通過時間に応じた目標アイドル回転数若しくはアイドル回転の停止を決定し、エンジンECU39にエンジン制御を要求し、また、減速が必要であればブレーキECU38に減速を要求する。
【0114】
また、渋滞予測監視センタ10の信号機制御部17aは、決定された優先順位に従い信号機12A〜12Dの表示を制御する(S15)。上述したように、1対の信号機12A,12Bで停止表示と走行許可表示を交互に切り替えたり、優先順位の高い車両に先に走行許可表示することで、車両の相対的な走行位置、隊列を制御できる。なお、信号機がない場合は、特定通過点で車両毎に走行車線を指示してもよい。
【0115】
そして、車両が通信装置15を通過するとその通過時刻から、渋滞演算制御部17bは当該車両の通過時間を利用して推定通過時間を修正する(S16)。これにより、常に推定通過時間の精度を保つことができる。
【0116】
以上説明したように、本実施例の渋滞緩和システム1は、隘路を通過する複数の車両の優先順位を決定し、各車両に送信するので複数の車両が互いにどの車両がどの順番で車線変更するかを把握でき、規律ある車線変更が可能となる。また、各車両の走行位置を優先順位に従い制御して隊列を決定するので、車線変更を容易にすることができる。運転者に優先順位を把握させ、車両の隊列も優先順位に従ったものとなることで、隊列長も最小限にでき割り込みよる乱れも抑制できるので、結果的に隘路の通過時間を最小にすることができる。
【実施例2】
【0117】
本実施例では、隘路発生時の経路選択、車線選択について説明する。なお、本実施例では適宜実施例1の構成を利用する。
【0118】
図16は、車両と隘路の関係の一例を示す。渋滞制御ECU40は、道路地図に目的地までの経路を設定しており、その経路上に隘路が発生している。本実施例の渋滞制御ECU40は、このような場合に経路通り進むのか、回避経路を選択するのかを判定し、また、適切な車線を運転者に指示することができる。
【0119】
例えば、図16(b)に示すように、片側3車線以上の道路を走行している場合であって、かつ、隘路が2車線以下の場合、車両は複数の車線を選択可能となる。しかしながら、車両を交互に左右の車線に割り振ると、隘路を通過した後に右折する車両を左車線に誘導する場合もあるため、好ましくない。そこで、取り得る車線のうち、目的地までの経路情報から隘路前後の情報を抽出し、車両にとって評価値の高い車線を運転者に指示する。なお、隘路の位置等は、通信装置14により車両に送信される。
【0120】
図17は、経路選択及び車線選択の処理手順を示すフローチャート図である。以下、図17に沿って説明する。
【0121】
(S10)
隘路及び特定点Sの位置が確定すると、渋滞制御ECU40は、隘路及び特定点Sが経路途中にあるか否かを判定する(S10)。そして、隘路及び特定点Sが経路途中にない場合(S10のYes)、処理(1)を実行する。
【0122】
図18は処理(1)の手順を示すフローチャート図を、図19(a)は、特定点Sが経路に含まれない場合を、図19(b)は特定点Sが経路に含まれる場合を、それぞれ示す。
【0123】
渋滞制御ECU40は、特定点Sが経路上にあるか否かを判定する(S11)。特定点Sは、渋滞開始位置又は隘路手前の道路標識等であるので、特定点Sが経路に含まれていなければ、隘路による渋滞の影響を受けずに通過できると考えられる。
【0124】
したがって、図19(a)のように、特定点Sが隘路に含まれていなければ、渋滞制御ECU40は、ナビの経路をそのまま利用する(S12)。図19(b)のように、特定点Sが経路に含まれていれば、渋滞制御ECU40は、特定点Sを回避する経路があるか否かを判定する(S13)。
【0125】
そして、特定点Sを回避する経路があれば(S13のYes)、渋滞制御ECU40は処理(2)を実行する。後述するように、処理(2)では特定点Sを回避するか否かを判定する。
【0126】
特定点Sを回避する経路がなければ(S13のNo)、ステップS30の処理に進む。
【0127】
図20(a)は、処理(2)の処理手順を示すフローチャート図である。渋滞制御ECU40は、図19(b)のように特定点Sを回避する経路がある場合、元の経路を通過した方が早いのか特定点Sを回避した方が早いのかを判定する。
【0128】
渋滞制御ECU40は、特定点Sを通過し合流点まで走行した場合の所用推定時間A〔min〕を推定する(S21)。渋滞制御ECU40は、特定点Sの位置と推定通過時間から経路における渋滞部の通過時間を推定し、合流点までの所用推定時間Aを算出する。
【0129】
ついで、渋滞制御ECU40は、回避経路を通過し合流点まで走行した場合の所用推定時間B〔min〕を推定する(S22)。所用推定時間Bは、合流点までの距離により容易に算定される。
【0130】
そして、渋滞制御ECU40は、2つの所用推定時間A、Bを比較し、所用推定時間の短い経路を選択する(S23)。すなわち、A<B でない場合(S23のNo)、渋滞制御ECU40は回避経路を選択し(S24)、A<B の場合(S23のYes)、渋滞制御ECU40は特定点Sを通過する元の経路を選択する(S25)。
【0131】
元の特定点Sを通過する経路を選択した場合には図17のステップS30に戻る。
【0132】
(S20)
図17のステップS20に戻り、渋滞制御ECU40は隘路及び特定点Sを回避する経路があるか否かを判定する(S20)。隘路及び特定点Sを回避する経路がある場合(S20のYes)、渋滞制御ECU40は処理(2)を実行する。
【0133】
(S30)
図17のステップS30は、渋滞のある元の経路を選択した場合であるので、適切な車線を選択する処理となる。
【0134】
最適な車線を選択するため、渋滞制御ECU40は3車線以上か否かを判定する(S30)。1車線又は2車線であれば(S30のNo)、渋滞制御ECU40は処理(3)を実行する。
【0135】
図20(b)は、処理(3)の処理手順を示すフローチャート図である。処理(3)では、2車線かつ渋滞がない場合は、渋滞のない車線に車線変更する。なお、渋滞の有無は車速により判定され、渋滞のない場合とは大幅に減速又は停止せずに隘路を通過できる状態をいう。
【0136】
まず、渋滞制御ECU40は、2車線か否かを判定する(S31)。1車線の場合(S31のNo)は、対向車線と交互通行になる。1車線の場合には処理(5)にて説明する。
【0137】
2車線の場合(S31のYes)、渋滞制御ECU40は渋滞があるか否かを判定する(S32)。そして、渋滞がある場合は(S32のYes)、渋滞制御ECU40は処理(2)により経路を選択する。処理(2)では、合流点までの所用推定時間に応じて経路を選択する。
【0138】
渋滞がない場合は(S32のNo)、現在の走行車線と工事箇所11の車線が一致しているか否かを判定する(S33)。一致していない、すなわち別車線の場合は(S33のNo)、そのまま走行可能であるが、他車線からの合流が予想されるので処理(6)を実行する。
【0139】
現在の走行車線と工事箇所11の車線が一致する場合(S33のYes)、渋滞制御ECU40は、工事箇所11を回避するよう指示する(S34)。すなわち、工事箇所11のない車線へ車線変更するよう指示する。
【0140】
車線変更が終わり回避完了したら(S35)、渋滞制御ECU40は元の経路に戻るよう指示する(S36)。したがって、隘路を通過するために車線変更した場合でも、迅速に元の車線に戻ることができる。
【0141】
図21(a)は、処理(5)の処理手順を示すフローチャート図を、図21(b)は1車線に隘路がある道路の一例を示す。1つしかない進行方向の車線は工事箇所11により走行できないので、反対車線が隘路となり、反対車線は対向車両と交互に通行することになる。
【0142】
1車線の場合、渋滞予測監視センタ10は、走行車線だけでなく反対車線にも特定点Sを設定する。すなわち、反対車線も渋滞することが予想されるか渋滞が発生するため、
渋滞予測監視センタ10は、走行車線の特定点Sを通過した車両に優先順位を設定すると共に、反対車線の特定点Sを通過した車両に優先順位を設定し、それぞれの優先順位を各車両に送信する(S51)。例えば、走行車線の車両が通過すべきタイミングでは、走行車線の車両の優先順位は先頭から1〜Nとなり、対向車線の車両の優先順位はN+1〜となる。
【0143】
各車両の運転者は、表示された優先順位に従い、隘路を通過するか否かを決定するので、交互通行が実現できる(S52)。なお、走行車線と対向車線のうち渋滞の長い車線の車両に高い優先順位を設定することで、交通量の多い車線の渋滞を低減できる。
【0144】
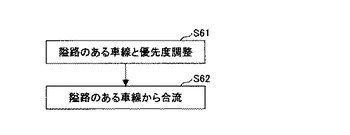
図23は、処理(6)の処理手順を示すフローチャート図である。処理(6)は、2車線が渋滞しておらず、工事箇所11と走行車線とが一致していない場合の処理である。したがって、車両はそのまま走行することができる。しかしながら、工事箇所11のある他車線から自車線に車両が合流するおそれがあるので、渋滞予測監視センタ10が送信する優先順位に基づき走行位置を調整する(S61)。
【0145】
車両の運転者は優先順位に従い、他車線から車線変更する車両を自車両の前後に入るよう車速を調整、合流が完了する(S62)。
【0146】
(S40)
図17のステップS40に戻り、走行車線が3車線以上の場合の処理を説明する。3車線以上の場合、渋滞制御ECU40は渋滞があるか否かを判定する(S40)。渋滞がある場合は(S40のYes)、渋滞制御ECU40は処理(1)を実行する。
【0147】
(S50)
渋滞がない場合(S40のNo)、渋滞制御ECU40は、現在走行している車線と工事箇所11がある車線が一致するか否かを判定する(S50)。
【0148】
一致していない、すなわち別車線の場合は(S50のNo)、他車線からの合流が予想されるので処理(4)を実行する。
【0149】
処理(4)では、3車線以上の車線のいずれかを、工事箇所11と走行車線が一致しない状態で走行している場合である。図16(b)のように3車線のいずれかの車線に工事箇所11がある場合において、右車線に工事箇所11があり、車両は中央車線又は左車線を走行しているとする。したがって、車両はそのまま車線変更することなく、直進走行することができる。
【0150】
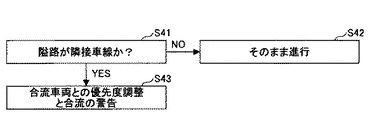
図22は、処理(4)の処理手順を示すフローチャート図である。
【0151】
渋滞制御ECU40は、まず、工事箇所11が隣接車線か否かを判定し(S41)、隣接車線でなければ、そのまま走行する(S42)。すなわち、工事箇所11のある車線と隣接していないため、工事箇所11のある車線の車両が自車線に合流するおそれも少なく、そのまま走行できる。
【0152】
工事箇所11が隣接車線の場合(S41のYes)、渋滞制御ECU40は、渋滞予測監視センタ10から送信される優先順位に従い、合流する車両があることを警告する(S43)。したがって、運転者は、優先順位に基づき合流してくる車両に注意しながら走行できる。
【0153】
(S60)
図17のステップS50に戻り、現在走行している車線と工事箇所11の車線が一致している場合(S50のYes)、回避する必要があるため、渋滞制御ECU40は回避車線と、元の経路との差を計算する(S60)。
【0154】
例えば、3車線の道路の右車線を走行している場合、中央線又は左車線と、ナビの経路との差を例えば車線数で数え、現在の走行車線から元の経路に戻るまで、トータルで何車線、車線変更するかを数える。
【0155】
(S70)
渋滞制御ECU40は、車線変更の数の最も少ない車線が好ましい(評価値最大の)車線とする(S70)。
【0156】
(S80)
車線が決定したので、実施例1と同様に、渋滞制御ECU40は渋滞予測監視センタ10から送信される優先順位に応じて合流位置を計算し、運転者に報知する(S80)。
【0157】
(S90、S100、S110)
運転者は優先順位及び合流位置を参照して車線変更することで工事箇所11の回避を開始(S90)、隘路を通過したら回避が完了する(S100)。隘路を通過した以降は、渋滞制御ECU40はナビの元の経路(車線)に戻るよう指示するので、運転者は元の経路に戻ることができる(S110)。以上で、図17の処理が終了する。
【0158】
本実施例によれば、ナビの設定した経路上に隘路又は渋滞が発生しても、回避経路を走行した場合の時間とナビの経路(渋滞)を走行した場合の所用推定時間を推定し、より早く目的地に到達する経路を決定することができる。
【0159】
また、回避経路の設定が困難な場合は、走行車線と工事箇所11の位置応じて適切な車線を指示することができる。合流が必要な場合、又は、他車線からの合流が予想される場合は、優先順位及び合流位置を表示するのでスムースに合流を完了させることができる。
【実施例3】
【0160】
実施例1では渋滞予測監視センタ10により優先順位を決定したが、本実施例では原則的に車両間で優先順位を決定し、車両間では優先順位の調整が困難な場合に渋滞予測監視センタ10に優先順位の調整を依頼する渋滞緩和システム1について説明する。
【0161】
図24は、渋滞緩和システム1が適用された道路及び車両の概略図を示す。なお、図24において図2と同一構成部分には同一の符号を付しその説明は省略する。本実施例の車両A〜Zの渋滞制御ECU40は、車両間で互いに通信する通信装置41を備え、車両A〜Zは、互いの車両情報を交換して優先順位を決定する。通信装置41は、前後の車両及び左右の車両とのみ通信する直進性の高い近赤外など光通信の通信装置であることが好ましく、送信部はLEDで受信部はフォトダイオードで構成されている。したがって、各車両は前後及び左右の所定部に送信部及び受光部を備える。
【0162】
そして、優先順位が決定できず渋滞予測監視センタ10に調整を依頼した場合には、渋滞予測監視センタ10が各車両の優先順位を決定する。
【0163】
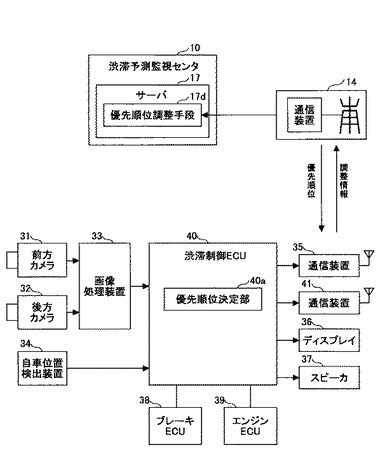
図25は、渋滞予測制御装置20及び地上システム3から成る渋滞緩和システム1のブロック図を示す。なお、図25において図3と同一構成部分には同一の符号を付しその説明は省略する。本実施例の地上システム3は、監視カメラ13による撮影や信号機12A〜12Dの制御を必要とせず、通信装置14のみを備える。また、渋滞予測制御装置20の構成は実施例1と同様であるが、渋滞予測監視センタ10は優先順位調整部17dを、渋滞予測制御装置20は各車両間で優先順位を決定する優先順位決定部40aを有する点で実施例1と異なる。
【0164】
車両間における優先順位の決定について説明する。いずれかの車両(図24では車両A、X)が隘路を検出することで、優先順位決定部40aが優先順位の決定を開始する。隘路の検出は、例えば前方カメラ31により標識を撮影することで検出してもよいし、運転者が発見し所定のボタンを押下して渋滞予測制御装置20に入力してもよい。
【0165】
隘路が検出されると車両A、Xの渋滞予測制御装置20は隘路検出信号を同報的に車両B、C及び車両Y、Zに送信するので、隘路検出信号は車両間を次々と伝達される。各車両A〜Zの優先順位決定部40aは、走行車線と工事箇所11のある車線等に基づき優先順位を決定していく。例えば、次のような規則に従い優先順位決定部40aは優先順位を決定する。
a)同じ車線の車両では前方にある車両ほど優先順位が高くなる
b)隘路を通過直前の左右の車両では、工事箇所11のない車線の車両の方が優先順位が高い
各車線における隘路までの車両数は、通信に応答した車両数のうち、自車位置検出装置34により検出された同じ車線の車両数から検知される。また、先行車両が隘路を通過して前方の車両数が減少した場合も、通信に応答する車両数から各車線における隘路までの車両数が検知される。
【0166】
渋滞箇所11のない車線は先頭車両から隘路を通過でき、ついで、工事箇所11のある車線の車両が車線変更して隘路を通過する。一方の車線の車両が隘路を通過してその車線の車両数が少なくなると、車両数が少なくなった車線の車両の優先順位が1つずつ上がることになるので、基本的に左右の車線の車両が交互に隘路を通過できるようになる。
【0167】
図24では、車両Aと車両X)により車両Xの方が優先順位が高くなり、車両XとYではa)により車両Xの方が優先順位が高くなる。車両X、Aが通過したと仮定すると、車両B、Yについて同様に優先順位が決定でき、これを繰り返すことで後続する車両の優先順位を決定できる。
【0168】
なお、決定された優先順位は実施例1と同様にディスプレイ36に表示される。本実施例では、推定通過時間の算出は困難であるので推定通過時間の変わりに例えば車両数を表示する。
【0169】
車両間では優先順位が決定できない場合に、渋滞予測監視センタ10の優先順位調整部17dが調整する優先順位について説明する。上記のような規則が設けられていない場合や、優先順位が決定されてもそれを不満として自らのタイミングで車線変更する車両が多いため優先順位が安定しないような場合、渋滞制御ECU40は渋滞予測監視センタ10に優先順位の調整を依頼する。
【0170】
優先順位調整部17dは、依頼を受けて隘路の手前の車両A〜Zに優先順位を調整するための調整情報を送信させる。調整情報は、例えば、自車両より前方の車両数、走行車線、位置情報、緊急車両か否か、等である。渋滞予測監視センタ10は、調整情報に基づき、例えば上記の規則に従い優先順位を決定し、車両A〜Zへ送信する。なお、送信された優先順位は実施例1と同様にディスプレイ36に表示される。
【0171】
優先順位調整部17dが調整して決定した優先順位に強制力を持たせるため、優先順位が高い車両ほど大きい最大車速の走行を許可してもよい。制限された最大車速で走行すると、優先順位が高い車両ほど隘路に早く近づくことができ、優先順位に従った隊列とすることができる。また、優先順位を無視した割り込みも困難となる。
【0172】
したがって、本実施例によれば、車両間でのみ優先順位が決定できるので地上システム3の構成を簡易してコスト増を抑制できる。また、車両間では優先順位が決定できない場合には、渋滞予測監視センタ10により確実に優先順位を決定することができる。各車両の運転者は、どの車両がどの順番で車線変更するかを把握でき、規律ある車線変更が可能となる。運転者に優先順位を把握させることで、割り込みよる乱れも抑制できるので、結果的に隘路の通過時間を最小にすることができる。
【図面の簡単な説明】
【0173】
【図1】隘路と走行する車両を示す図である。
【図2】渋滞緩和システムが適用された道路及び車両の概略図である。
【図3】渋滞予測制御装置及び地上システムから成る渋滞緩和システムのブロック図である。
【図4】渋滞予測情報、渋滞部通過情報の一例を示す図である。
【図5】渋滞制御ECUが道路標識等を特定点Sに特定する手順のフローチャート図である。
【図6】渋滞制御ECUが道路標識等を特定点Sに特定する手順のフローチャート図である。
【図7】渋滞演算制御部が優先順位を決定する手順のフローチャート図である。
【図8】渋滞部通過情報生成部が推定通過時間を推定する手順のフローチャート図である。
【図9】推定通過時間の推定の説明図である。
【図10】地上システムが左右の車両を交互に隘路を通過させる手順のフローチャート図である。
【図11】信号機の点灯制御の一例を示す図である。
【図12】渋滞予測監視センタが緊急車両に隘路を優先的に通過させる手順のフローチャート図である。
【図13】渋滞制御ECUがディスプレイに表示する渋滞部通過情報の一例を示す図である。
【図14】渋滞制御ECUが最適なエンジン回転に調整する手順のフローチャート図である。
【図15】渋滞緩和システムが複数の車両の隊列を制御し、渋滞部通過情報を車両に送信する制御手順を示すシーケンス図である。
【図16】車両と隘路の関係の一例を示す図である。
【図17】経路選択及び車線選択の処理手順を示すフローチャート図である。
【図18】処理(1)の手順を示すフローチャート図である。
【図19】特定点Sと経路の関係の一例を示す図である。
【図20】処理(2)(3)の処理手順を示すフローチャート図である。
【図21】処理(5)の処理手順を示すフローチャート図と一車線に隘路がある道路の一例を示す図である。
【図22】処理(4)の処理手順を示すフローチャート図である。
【図23】処理(6)の処理手順を示すフローチャート図である。
【図24】渋滞緩和システムが適用された道路及び車両の概略図である。
【図25】渋滞予測制御装置及び地上システムから成る渋滞緩和システムのブロック図である。
【符号の説明】
【0174】
1 渋滞緩和システム
3 地上システム
10 渋滞予測監視センタ
11 工事箇所
12A〜12D 信号機
9、13 監視カメラ
14、15、35、41 通信装置
16、33 画像処理装置
17 サーバ
17a 信号機制御部
17b 渋滞演算制御部
17c 渋滞部通過情報生成部
17d 優先順位調整部
18 メモリ
20 渋滞予測制御装置
31 前方カメラ
32 後方カメラ
34 自車位置検出装置
36 ディスプレイ
37 スピーカ
38 ブレーキECU
39 エンジンECU
40 渋滞制御ECU
40a 優先順位決定部
【特許請求の範囲】
【請求項1】
車載された渋滞予測制御装置と、複数の車両が通過する隘路の渋滞を緩和する地上システムと、を有する渋滞緩和システムにおいて、
前記地上システムは、
所定部を通過する車両の識別情報を取得する第1の識別情報取得手段と、
前記所定部を通過した第1通過時刻を取得する第1の通過時刻取得手段と、
前記隘路を通過した車両の識別情報を取得する第2の識別情報取得手段と、
前記隘路を通過した第2通過時刻を取得する第2の通過時刻取得手段と、
第1取得時刻に基づき前記隘路を通過する各車両の優先順位を決定する渋滞演算制御部と、前記優先順位を各車両に送信する送信装置と、を有し、
前記渋滞予測制御装置は、前記優先順位を受信する受信装置と、
前記優先順位を乗員に報知する報知装置と、を有する、
ことを特徴とする渋滞緩和システム。
【請求項2】
前記渋滞演算制御部は、第1通過時刻と第2通過時刻に基づき前記所定部から隘路を通過するまでの推定通過時間を推定し、該推定通過時間を各車両に送信する、
ことを特徴とする請求項1記載の渋滞緩和システム。
【請求項3】
車線が複数の道路のいずれかの車線に隘路が発生した場合、
前記渋滞演算制御部は、前記所定部を通過してから隘路までの所定区間において、左右の車線を走行する車両数が均等になるように、各車両に走行すべき車線情報を送信する、
ことを特徴とする請求項1記載の渋滞緩和システム。
【請求項4】
前記地上システムは、
前記所定部から隘路までに存在する信号機の表示を車線毎に制御する信号機制御部を有し、
前記信号機制御部は、前記優先順位が高い車両を低い車両よりも早期に通過させ、前記優先順位の低い車両が高い車両よりも隘路側を走行する場合は低い車両を停止させるように、前記信号機の表示を制御する、
ことを特徴とする請求項1記載の渋滞緩和システム。
【請求項5】
前記渋滞予測制御装置は、
車線変更しなければ隘路を通過できない場合、現在の車線から隘路を通過して予めナビシステムが設定した経路に戻る場合の、車線の変更数が最小となる車線を好ましい車線として運転者に報知する、
ことを特徴とする請求項1記載の渋滞緩和システム。
【請求項6】
複数の車両が通過する隘路の渋滞を緩和する地上システムであって、
所定部を通過する車両の識別情報を取得する第1の識別情報取得手段と、
前記所定部を通過した第1通過時刻を取得する第1の通過時刻取得手段と、
前記隘路を通過した車両の識別情報を取得する第2の識別情報取得手段と、
前記隘路を通過した第2通過時刻を取得する第2の通過時刻取得手段と、
第1取得時刻に基づき前記隘路を通過する各車両の優先順位を決定する渋滞演算制御部と、を有することを特徴とする地上システム。
【請求項7】
走行方向の隘路の通過情報を取得する車載された渋滞予測制御装置であって、
所定部を通過する車両の識別情報を取得する第1の識別情報取得手段と、
前記所定部を通過した第1通過時刻を取得する第1の通過時刻取得手段と、
前記隘路を通過した車両の識別情報を取得する第2の識別情報取得手段と、
前記隘路を通過した第2通過時刻を取得する第2の通過時刻取得手段と、
第1取得時刻に基づき前記隘路を通過する各車両の優先順位を決定する渋滞演算制御部と、
前記優先順位を各車両に送信する送信装置と、を有する地上システムから、
前記優先順位を受信する受信装置と、
前記優先順位を乗員に報知する報知装置と、
を有することを特徴とする渋滞予測制御装置。
【請求項1】
車載された渋滞予測制御装置と、複数の車両が通過する隘路の渋滞を緩和する地上システムと、を有する渋滞緩和システムにおいて、
前記地上システムは、
所定部を通過する車両の識別情報を取得する第1の識別情報取得手段と、
前記所定部を通過した第1通過時刻を取得する第1の通過時刻取得手段と、
前記隘路を通過した車両の識別情報を取得する第2の識別情報取得手段と、
前記隘路を通過した第2通過時刻を取得する第2の通過時刻取得手段と、
第1取得時刻に基づき前記隘路を通過する各車両の優先順位を決定する渋滞演算制御部と、前記優先順位を各車両に送信する送信装置と、を有し、
前記渋滞予測制御装置は、前記優先順位を受信する受信装置と、
前記優先順位を乗員に報知する報知装置と、を有する、
ことを特徴とする渋滞緩和システム。
【請求項2】
前記渋滞演算制御部は、第1通過時刻と第2通過時刻に基づき前記所定部から隘路を通過するまでの推定通過時間を推定し、該推定通過時間を各車両に送信する、
ことを特徴とする請求項1記載の渋滞緩和システム。
【請求項3】
車線が複数の道路のいずれかの車線に隘路が発生した場合、
前記渋滞演算制御部は、前記所定部を通過してから隘路までの所定区間において、左右の車線を走行する車両数が均等になるように、各車両に走行すべき車線情報を送信する、
ことを特徴とする請求項1記載の渋滞緩和システム。
【請求項4】
前記地上システムは、
前記所定部から隘路までに存在する信号機の表示を車線毎に制御する信号機制御部を有し、
前記信号機制御部は、前記優先順位が高い車両を低い車両よりも早期に通過させ、前記優先順位の低い車両が高い車両よりも隘路側を走行する場合は低い車両を停止させるように、前記信号機の表示を制御する、
ことを特徴とする請求項1記載の渋滞緩和システム。
【請求項5】
前記渋滞予測制御装置は、
車線変更しなければ隘路を通過できない場合、現在の車線から隘路を通過して予めナビシステムが設定した経路に戻る場合の、車線の変更数が最小となる車線を好ましい車線として運転者に報知する、
ことを特徴とする請求項1記載の渋滞緩和システム。
【請求項6】
複数の車両が通過する隘路の渋滞を緩和する地上システムであって、
所定部を通過する車両の識別情報を取得する第1の識別情報取得手段と、
前記所定部を通過した第1通過時刻を取得する第1の通過時刻取得手段と、
前記隘路を通過した車両の識別情報を取得する第2の識別情報取得手段と、
前記隘路を通過した第2通過時刻を取得する第2の通過時刻取得手段と、
第1取得時刻に基づき前記隘路を通過する各車両の優先順位を決定する渋滞演算制御部と、を有することを特徴とする地上システム。
【請求項7】
走行方向の隘路の通過情報を取得する車載された渋滞予測制御装置であって、
所定部を通過する車両の識別情報を取得する第1の識別情報取得手段と、
前記所定部を通過した第1通過時刻を取得する第1の通過時刻取得手段と、
前記隘路を通過した車両の識別情報を取得する第2の識別情報取得手段と、
前記隘路を通過した第2通過時刻を取得する第2の通過時刻取得手段と、
第1取得時刻に基づき前記隘路を通過する各車両の優先順位を決定する渋滞演算制御部と、
前記優先順位を各車両に送信する送信装置と、を有する地上システムから、
前記優先順位を受信する受信装置と、
前記優先順位を乗員に報知する報知装置と、
を有することを特徴とする渋滞予測制御装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図16】

【図17】
【図18】
【図19】
【図20】

【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2008−262418(P2008−262418A)
【公開日】平成20年10月30日(2008.10.30)
【国際特許分類】
【出願番号】特願2007−105163(P2007−105163)
【出願日】平成19年4月12日(2007.4.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成20年10月30日(2008.10.30)
【国際特許分類】
【出願日】平成19年4月12日(2007.4.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]