
減揺制御の双胴船およびその制御方法
【課題】高速双胴船のピッチングを低減するとともに、減揺装置を設けても走航抵抗を低減して乗り心地の向上と燃料経済性の向上をはかることができる減揺装置を提供する。
【解決手段】双胴船1の両側の船体3の船尾部5間のトンネル状部4に、ピッチング制御のために水中翼6を水没状態として揺動制御駆動自在に設け、双胴船1の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部5の水中翼6の仰角を加減制御して減揺し、波の状態に応じて走航抵抗が最小になるようにして航行できるようにしている。
【解決手段】双胴船1の両側の船体3の船尾部5間のトンネル状部4に、ピッチング制御のために水中翼6を水没状態として揺動制御駆動自在に設け、双胴船1の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部5の水中翼6の仰角を加減制御して減揺し、波の状態に応じて走航抵抗が最小になるようにして航行できるようにしている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、旅客船、漁船、観光船等の船舶分野における減揺制御の双胴船およびその制御方法に関するものである。
【背景技術】
【0002】
双胴船は、安定した航行ができることで知られ、さらに水中翼を装着して高速航行がはかられることが知られている。
そしてまた、特開平6−263082号公報や特開平9−272488号公報のように水中翼の両側部にフラップ状の補助翼を設けて、ピッチングやローリングの低減をはかって減揺航行することが提案されている。
【0003】
しかし、上記のように水中翼、補助翼を設けてピッチングやローリングの低減をはかって減揺航行することができるものの、特にピッチングの制御では水中翼の両側部のフラップ状の補助翼を揺動制御しているもので、ピッチングの制御が十分でなかった。
【0004】
また、従来、一般的に減揺装置は、走航抵抗の増加を招くと考えられていて、水中翼を装着すると走航抵抗となって燃料経済性に劣るものであった。
【発明の概要】
【発明が解決しようとする課題】
【0005】
そのため、高速双胴船のピッチングを低減するとともに、減揺装置を設けても走航抵抗を低減して乗り心地の向上と燃料経済性の向上をはかることが課題であった。
【課題を解決するための手段】
【0006】
本発明は、上記のような点に鑑みたもので、上記の課題を解決するために、双胴船の両側の船体の船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御自在に設けたことを特徴とする減揺制御の双胴船を提供するにある。
【0007】
また、双胴船の両側の船体の船尾部間のトンネル状部の直後部にトンネル状部の全幅にわたって水中翼を設けたことを特徴とする減揺制御の双胴船を提供するにある。
【0008】
また、双胴船の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の揺動角度を加減制御するように形成した減揺制御の双胴船を提供するにある。
【0009】
さらに、波の状態に応じて走航抵抗が最小になるように姿勢制御装置によって水中翼の仰角を加減制御するように形成した減揺制御の双胴船を提供するにある。
【0010】
さらにまた、双胴船の両側の船体の中央連結部船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御駆動自在に設け、双胴船の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の仰角を加減制御して減揺することを特徴とする減揺制御の双胴船の制御方法を提供するにある。
【発明の効果】
【0011】
本発明の減揺制御の双胴船は、双胴船の両側の船体の船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御自在に設けたことによって、双胴船の両側の船体間のトンネル状部を流れる水流中で水中翼を揺動制御でき、船尾を所要の通り上下させて必要な大きな揚力でピッチング制御を行うことができて、ピッチング角を低減して双胴船の走航抵抗を減少して航行できる。そのため、乗り心地の向上と燃料経済性の向上をはかることができる。双胴船の中央のトンネル状部を流れる水流は、船体の速度よりも速く、また水面高さも外側の水面よりも高く、この水流の中に水中翼を設置することによって、船体のピッチングを抑制するのに必要な大きな揚力を得ることができ、双胴船の走航抵抗を減少できるものである。
また、双胴船の船体の後方の船尾部に設置すると、水中翼によって偏向された水流が船体に当たって騒音を発生することがなくなる。さらに、流木等が水中翼に当たっても船体を破損することがなく安全である。
【0012】
特に、双胴船の両側の船体の船尾部間のトンネル状部の直後部にトンネル状部の全幅にわたって水中翼を設けたことによって、船尾間のトンネル状部の全幅の水中翼を揺動制御でき、船尾を最大の揚力で上下させて上記のようにピッチング制御を行うことができて双胴船を減揺制御できる。
【0013】
また、双胴船の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の揺動角度を加減制御するように形成したことによって、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の揺動角度を加減できて、双胴船の乗り心地の向上と燃料経済性の向上をはかれる。
【0014】
そしてまた、波の状態に応じて走航抵抗が最小になるように姿勢制御装置によって水中翼の揺動角度を加減制御するように形成したことによって、波の状態に応じて水中翼の揺動角度を加減して、水中翼を設けるにもかかわらず、双胴船の走航抵抗を減少して双胴船の乗り心地の向上と燃料経済性の向上をはかれる。
【0015】
さらに、双胴船の両側の船体の船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御駆動自在に設け、双胴船の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の揺動角度を加減制御して減揺するすることによって、上記のように水中翼の揺動角度を加減して、水中翼を設けるにもかかわらず、双胴船の走航抵抗を減少して双胴船の乗り心地の向上と燃料経済性の向上をはかれる。
【図面の簡単な説明】
【0016】
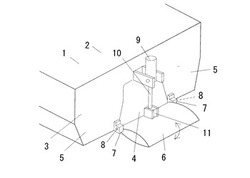
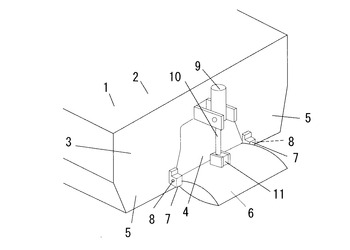
【図1】本発明の双胴船の一実施例の一部省略した後部斜視図、
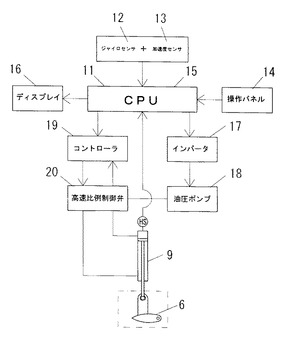
【図2】同上の水中翼の制御ブロック図、
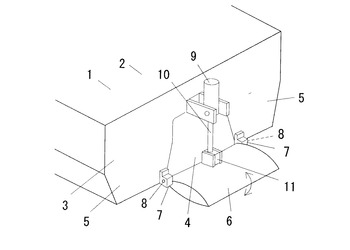
【図3】同上の他の実施例の一部省略した後部斜視図、
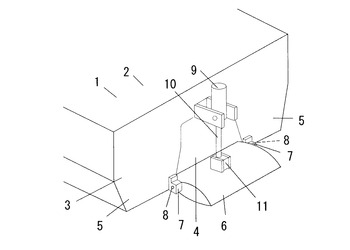
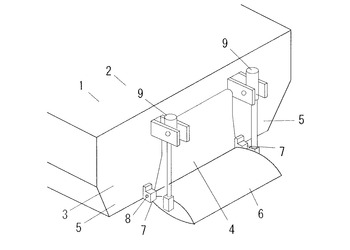
【図4】同上の他の実施例の一部省略した後部斜視図、
【図5】同上のさらに他の実施例の一部省略した後部斜視図、
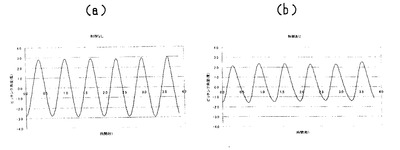
【図6】同上の揺動制御実験のピッチング制御無し(a)と、制御有り(b)とのピッチング角度の比較図、
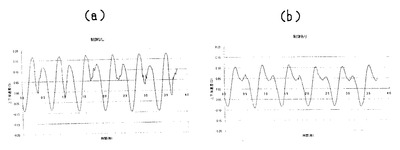
【図7】同上の揺動制御実験のピッチング制御無し(a)と、制御有り(b)との上下加速度の比較図。
【発明を実施するための形態】
【0017】
本発明の減揺制御の双胴船およびその制御方法は、双胴船の両側の船体の船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御自在としたことを特徴としている。
【0018】
減揺制御の双胴船1は、図1のように船本体2として左右対称状に船体3を設けていて、このクロスデッキ下の両側の船体3間のトンネル状部4に船首側から船尾5側にわたってスクリューを介して水流を通過して走航するようにしている。特に、双胴船1の両側の船体3の船尾5部間のトンネル状部4にその全幅にわたってピッチング制御のために水中翼6を水没状態として設け、ピッチング制御のときに水中翼6を−15度〜+15度、好ましくは−10度〜+10度の角度にわたって駆動制御するようにしている。±15度を越えると抵抗が増えて好ましくない。
【0019】
そのため、図1のように船尾5部の対向する内側の後面下端部に、水中翼6を軸支する翼軸支部7をそれぞれ水平に設けて水中翼6の両側部の揺動用軸8を軸着し、船尾5の中央部に油圧シリンダー等の揺動駆動装置9を取着して、この揺動駆動装置9のロッド10部を固定台11を介して水中翼6の上面の中央部に連結し、水中翼6を後述のように多次元PID制御によって揺動駆動してピッチング制御をはかっている。水中翼6の支持部の翼軸支部7を揚力中心に設定すると、水中翼仰角の駆動システムの負荷が小さくでき、必要な油圧システムが小規模にできて好ましい。なお、船体2のキール部等から下方に出っ張りがないようにしておくと、浅瀬でも安全となる。
【0020】
このようにして双胴船1の船尾5間の全幅にわたって水中翼6を水没状態とし、双胴間のトンネル状部4を流れる高速の水流を利用して水中翼6を揺動制御駆動し、船尾5側を大きく揚力を発生して上下させてピッチング制御を行うことができて双胴船1を減揺制御して航行できるようにしている。
【0021】
上記水中翼6は、船本体2と比べて幅が1:2〜4、長さが1:100〜10、アスペクト比は通常の範囲として十分に船尾5側の揚力を発生するものとし、船本体2のほぼ重心部に設置した船体制御部11のジャイロセンサや傾斜センサ等の姿勢制御装置12や加速度センサ13を介して図2のように操作パネル14の操作によってCPU15を作動し、ディスプレイ16に表示するとともに、インバータ17を介して油圧ポンプ18を駆動制御し、コントローラ19を介して高速の比例制御弁やサーボ弁等の制御器20で油圧シリンダーの揺動駆動装置8を駆動制御し、水中翼6の揺動角度を検出する水中翼センサーHSで検出してその出力値を船体制御部11にフィードバックしたり、サーボモータを介したりしてPID制御、ファジー制御、ロバスト制御等による多次元制御をして、水中翼6を目的の仰角、俯角に駆動制御をしてピッチングを抑制するようにできる。
【0022】
たとえば、走航時、向い波の場合は船首を下げ、追い波の場合は船首を上げ、さらに波が高い場合は加速度センサ13にもとづいて水中翼6の揺動角度を高めに設定するなど波高や向い波、追い波等の波の状態に応じて、船尾5の水中翼6を目的の仰角、俯角に上記手段による多次元制御をして走航抵抗が最小になるように姿勢制御装置12を介して揺動制御して双胴船1を減揺制御して航行できる。なお、船体2が非常に不安定になる追い波の場合でも、水中翼6が水流の中にあるので、減揺効果が減少することがなく、安全性を向上できる。
【0023】
また、図3、図4のように水中翼6を船尾5の下端部の水中翼6の長さの1/10〜1/2の少し前方側や、水中翼6の厚さの1/2〜2倍の少し上または下方側に装着して、上記のようにピッチング制御することができる。水中翼6は、海面の自由境界に近い程揚力が減少し、また下端後部側程翼端の渦で船体3が抑制されるので、できるだけ船尾5部の下端前部側に設けるのが好ましい。また、水中翼6の前縁は、船体3の下面と同じ面、あるいは上記のように若干前方に位置し、水中翼6の前縁が船体3の下端面の若干前方に位置する場合には水中翼6の揚力中心を翼支持部と一致させることによって、翼の仰角を制御する力を少なくできる。
【0024】
さらに、図5のように水中翼6の揺動駆動装置9を船尾5の中央でなく、水中翼6の側部の船本体2のトンネル状部4の両側の船体3の内側部に装着して左右を同調制御するようにし、トンネル状部4を通過する高速の水流に揺動駆動装置9が当たらずに流体抵抗を低減するようにすることが好ましい。
【0025】
上記双胴船1について、水槽での実験モデルで、ジャイロセンサの姿勢制御装置12の出力をピッチング角速度ωとし、この数値積分をピッチング角θとし、水中翼6の制御角度P(t) として、P(t)=A・θ(t) +B・ω(t) +Cとして減揺制御できる。
ここに、A、B、Cは定数で、モデル実験、実機の航行時の測定、荒天時での測定など各種の試験を行なって定め、Cは走航中の航体トリムを定める値で、静水時の実験での走航抵抗が最中になるトリム角を定めておくものである。
【0026】
各種の波の状態で制御パラメータを設定して、これらのパラメータにもとづいてCPU15でジャイロセンサの姿勢制御装置12、加速度センサ13のデータから瞬時に判断して所要のパラメータに切り換えて、走航抵抗が最小になるようにジャイロセンサの姿勢制御装置12を介して揺動制御して双胴船1を所要の減揺航行を行なうようにできる。なお、上記した本発明の趣旨にもとづいて、P(t)=F(θ(t),ω(t))等としてファジー 制御、ロバスト制御等の制御方法でも実施することができる。
【実施例】
【0027】
図1、図2は、本発明の一実施例を示すもので、減揺制御の双胴船1は、両側の船体3の船尾5部間のトンネル状部4の船尾5部の対向する内側の後面下端部に翼軸支部7をそれぞれ水平に設けて水中翼6の両側部の揺動用軸8を軸着し、船尾5の中央部に油圧シリンダーの揺動駆動装置9を固着し、この揺動駆動装置9のロッド10部を固定台11を介して水中翼6の上面の中央部と連結して、船尾5部間のトンネル状部4にその全幅にわたって水中翼6を水没状態として揺動制御駆動自在に設け、水中翼6を−15度〜+15度の角度にわたって駆動制御するようにしている。
【0028】
上記水中翼6は、船本体2と比べて幅が1:2、長さが1:30、アスペクト比は通常の範囲として、図2のように船本体2のほぼ重心部に設置した船体制御部11のジャイロセンサの姿勢制御装置12および加速度センサ13を介して操作パネル14の操作によってCPU15を作動し、ディスプレイ16に表示するとともに、インバータ17を介して油圧ポンプ18を駆動制御し、コントローラ19を介して高速の比例制御弁の制御器20で油圧シリンダーの揺動駆動装置8を駆動制御し、水中翼6の揺動角度を水中翼センサーHSで検出してその出力値を船体制御部11にフィードバックし多次元PID制御して、所要の目的の仰角、俯角に多次元PID制御して双胴船1を減揺制御するようにしている。
【0029】
そのため、双胴船1の船尾5間の全幅にわたって水没状態の水中翼6によって、双胴間のトンネル状部4を流れる高速の水流を利用して揺動制御駆動して船尾5側を大きく揚力を発生して上下させて、ピッチング制御を行うことができ、双胴船1の走航抵抗が最小になるようにジャイロセンサの姿勢制御装置12を介して揺動制御して双胴船1をよりよく減揺制御して航行できる。船体3のトリムは、水中翼6の角度を手動等で調整し、速度が最高になるところをトリムとし、水中翼6はこのときの角度をニュートラル点として、上下に仰角を変えて減揺のための揚力を発生させるようにできる。
【0030】
また、図3、図4のように水中翼6を船尾5の下端部の水中翼6の長さの1/3位の少し前方側や、水中翼6の厚みの2倍の高さの少し上方側に装着することができる。水中翼6は、海面の自由境界に近い程揚力が減少し、また下端後部側程翼端の渦で船体3が抑制されるので、できるだけ下端前部側に設けることによって、より大きな揚力を発生できて好ましい。
【0031】
さらにまた、図5は、本発明のさらに他の実施例を示すもので、水中翼6の揺動駆動装置9を船尾5の中央でなく、水中翼6の側部の船本体2のトンネル状部4の両側の船体3の内側部に装着して左右を同調制御するようにしている。本実施例では、トンネル状部4を通過する高速の水流に揺動駆動装置9が当たらずに流体抵抗を低減することができ、双胴船1のより効率よく航行させることができる。
【0032】
本発明の双胴船1の水槽での実験モデルで、実機S船の25の1の模型船とし、翼長133mm、翼幅50mm、翼厚15%の対称水中翼とし、船速を2.7m/s、排水量を満載状態相当、波高3cm、波長3mの向かい波等として、上記したように水中翼6の揺動角度P(t)=A・θ(t) +B・ω(t) +Cとして入力して実験した。A、B、Cは、モデル実験、実機の航行時の測定値にもとづいてデータ送信して出力した。
【0033】
その結果、図6(a)、(b)のように、水中翼をピッチング制御しない場合(a)とピッチング制御した場合(b)のように、ピッチング制御を行なうことで、ピッチング角は3.7÷5.8=0.64で、64%に低減できた。
また、図7(a)、(b)のように、同上での上下加速度の変化も上下加速度は0.18÷0.25=0.72で、72%に上下加速度を低減できた。そのため、上記水中翼6の制御角度P(t) に加速度センサの検出値を加味することが、波高等で水中翼6を急に大きく揺動して減揺するのに有効である。
【0034】
また、船体の走航抵抗は、ピッチング制御しない場合は987gであったが、ピッチング制御した場合は699gであり、699÷987=0.71で、ほぼ30%の低減率であり、減揺装置の利用によって乗り心地の向上と燃料経済性の向上をはかることができる。一般的に、減揺装置は抵抗の増加を招くとの議論があったが、上記のようにピッチング制御することによって船体の走航トリムを抵抗が少ない状態に制御でき、その船体の抵抗減少が水中翼の動作による水中翼の増加抵抗を上回るものである。
【産業上の利用可能性】
【0035】
本発明は、旅客船、漁船、観光船等の船舶分野における減揺制御の双胴船およびその制御方法に利用できるものである。
【符号の説明】
【0036】
1…双胴船 2…船本体 3…胴体 4…トンネル状部 5…船尾
6…水中翼 9…揺動駆動装置 22…トリムタブ
【先行技術文献】
【特許文献】
【0037】
【特許文献1】特開平6−263082号公報
【特許文献2】特開平9−272488号公報
【技術分野】
【0001】
本発明は、旅客船、漁船、観光船等の船舶分野における減揺制御の双胴船およびその制御方法に関するものである。
【背景技術】
【0002】
双胴船は、安定した航行ができることで知られ、さらに水中翼を装着して高速航行がはかられることが知られている。
そしてまた、特開平6−263082号公報や特開平9−272488号公報のように水中翼の両側部にフラップ状の補助翼を設けて、ピッチングやローリングの低減をはかって減揺航行することが提案されている。
【0003】
しかし、上記のように水中翼、補助翼を設けてピッチングやローリングの低減をはかって減揺航行することができるものの、特にピッチングの制御では水中翼の両側部のフラップ状の補助翼を揺動制御しているもので、ピッチングの制御が十分でなかった。
【0004】
また、従来、一般的に減揺装置は、走航抵抗の増加を招くと考えられていて、水中翼を装着すると走航抵抗となって燃料経済性に劣るものであった。
【発明の概要】
【発明が解決しようとする課題】
【0005】
そのため、高速双胴船のピッチングを低減するとともに、減揺装置を設けても走航抵抗を低減して乗り心地の向上と燃料経済性の向上をはかることが課題であった。
【課題を解決するための手段】
【0006】
本発明は、上記のような点に鑑みたもので、上記の課題を解決するために、双胴船の両側の船体の船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御自在に設けたことを特徴とする減揺制御の双胴船を提供するにある。
【0007】
また、双胴船の両側の船体の船尾部間のトンネル状部の直後部にトンネル状部の全幅にわたって水中翼を設けたことを特徴とする減揺制御の双胴船を提供するにある。
【0008】
また、双胴船の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の揺動角度を加減制御するように形成した減揺制御の双胴船を提供するにある。
【0009】
さらに、波の状態に応じて走航抵抗が最小になるように姿勢制御装置によって水中翼の仰角を加減制御するように形成した減揺制御の双胴船を提供するにある。
【0010】
さらにまた、双胴船の両側の船体の中央連結部船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御駆動自在に設け、双胴船の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の仰角を加減制御して減揺することを特徴とする減揺制御の双胴船の制御方法を提供するにある。
【発明の効果】
【0011】
本発明の減揺制御の双胴船は、双胴船の両側の船体の船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御自在に設けたことによって、双胴船の両側の船体間のトンネル状部を流れる水流中で水中翼を揺動制御でき、船尾を所要の通り上下させて必要な大きな揚力でピッチング制御を行うことができて、ピッチング角を低減して双胴船の走航抵抗を減少して航行できる。そのため、乗り心地の向上と燃料経済性の向上をはかることができる。双胴船の中央のトンネル状部を流れる水流は、船体の速度よりも速く、また水面高さも外側の水面よりも高く、この水流の中に水中翼を設置することによって、船体のピッチングを抑制するのに必要な大きな揚力を得ることができ、双胴船の走航抵抗を減少できるものである。
また、双胴船の船体の後方の船尾部に設置すると、水中翼によって偏向された水流が船体に当たって騒音を発生することがなくなる。さらに、流木等が水中翼に当たっても船体を破損することがなく安全である。
【0012】
特に、双胴船の両側の船体の船尾部間のトンネル状部の直後部にトンネル状部の全幅にわたって水中翼を設けたことによって、船尾間のトンネル状部の全幅の水中翼を揺動制御でき、船尾を最大の揚力で上下させて上記のようにピッチング制御を行うことができて双胴船を減揺制御できる。
【0013】
また、双胴船の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の揺動角度を加減制御するように形成したことによって、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の揺動角度を加減できて、双胴船の乗り心地の向上と燃料経済性の向上をはかれる。
【0014】
そしてまた、波の状態に応じて走航抵抗が最小になるように姿勢制御装置によって水中翼の揺動角度を加減制御するように形成したことによって、波の状態に応じて水中翼の揺動角度を加減して、水中翼を設けるにもかかわらず、双胴船の走航抵抗を減少して双胴船の乗り心地の向上と燃料経済性の向上をはかれる。
【0015】
さらに、双胴船の両側の船体の船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御駆動自在に設け、双胴船の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の揺動角度を加減制御して減揺するすることによって、上記のように水中翼の揺動角度を加減して、水中翼を設けるにもかかわらず、双胴船の走航抵抗を減少して双胴船の乗り心地の向上と燃料経済性の向上をはかれる。
【図面の簡単な説明】
【0016】
【図1】本発明の双胴船の一実施例の一部省略した後部斜視図、
【図2】同上の水中翼の制御ブロック図、
【図3】同上の他の実施例の一部省略した後部斜視図、
【図4】同上の他の実施例の一部省略した後部斜視図、
【図5】同上のさらに他の実施例の一部省略した後部斜視図、
【図6】同上の揺動制御実験のピッチング制御無し(a)と、制御有り(b)とのピッチング角度の比較図、
【図7】同上の揺動制御実験のピッチング制御無し(a)と、制御有り(b)との上下加速度の比較図。
【発明を実施するための形態】
【0017】
本発明の減揺制御の双胴船およびその制御方法は、双胴船の両側の船体の船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御自在としたことを特徴としている。
【0018】
減揺制御の双胴船1は、図1のように船本体2として左右対称状に船体3を設けていて、このクロスデッキ下の両側の船体3間のトンネル状部4に船首側から船尾5側にわたってスクリューを介して水流を通過して走航するようにしている。特に、双胴船1の両側の船体3の船尾5部間のトンネル状部4にその全幅にわたってピッチング制御のために水中翼6を水没状態として設け、ピッチング制御のときに水中翼6を−15度〜+15度、好ましくは−10度〜+10度の角度にわたって駆動制御するようにしている。±15度を越えると抵抗が増えて好ましくない。
【0019】
そのため、図1のように船尾5部の対向する内側の後面下端部に、水中翼6を軸支する翼軸支部7をそれぞれ水平に設けて水中翼6の両側部の揺動用軸8を軸着し、船尾5の中央部に油圧シリンダー等の揺動駆動装置9を取着して、この揺動駆動装置9のロッド10部を固定台11を介して水中翼6の上面の中央部に連結し、水中翼6を後述のように多次元PID制御によって揺動駆動してピッチング制御をはかっている。水中翼6の支持部の翼軸支部7を揚力中心に設定すると、水中翼仰角の駆動システムの負荷が小さくでき、必要な油圧システムが小規模にできて好ましい。なお、船体2のキール部等から下方に出っ張りがないようにしておくと、浅瀬でも安全となる。
【0020】
このようにして双胴船1の船尾5間の全幅にわたって水中翼6を水没状態とし、双胴間のトンネル状部4を流れる高速の水流を利用して水中翼6を揺動制御駆動し、船尾5側を大きく揚力を発生して上下させてピッチング制御を行うことができて双胴船1を減揺制御して航行できるようにしている。
【0021】
上記水中翼6は、船本体2と比べて幅が1:2〜4、長さが1:100〜10、アスペクト比は通常の範囲として十分に船尾5側の揚力を発生するものとし、船本体2のほぼ重心部に設置した船体制御部11のジャイロセンサや傾斜センサ等の姿勢制御装置12や加速度センサ13を介して図2のように操作パネル14の操作によってCPU15を作動し、ディスプレイ16に表示するとともに、インバータ17を介して油圧ポンプ18を駆動制御し、コントローラ19を介して高速の比例制御弁やサーボ弁等の制御器20で油圧シリンダーの揺動駆動装置8を駆動制御し、水中翼6の揺動角度を検出する水中翼センサーHSで検出してその出力値を船体制御部11にフィードバックしたり、サーボモータを介したりしてPID制御、ファジー制御、ロバスト制御等による多次元制御をして、水中翼6を目的の仰角、俯角に駆動制御をしてピッチングを抑制するようにできる。
【0022】
たとえば、走航時、向い波の場合は船首を下げ、追い波の場合は船首を上げ、さらに波が高い場合は加速度センサ13にもとづいて水中翼6の揺動角度を高めに設定するなど波高や向い波、追い波等の波の状態に応じて、船尾5の水中翼6を目的の仰角、俯角に上記手段による多次元制御をして走航抵抗が最小になるように姿勢制御装置12を介して揺動制御して双胴船1を減揺制御して航行できる。なお、船体2が非常に不安定になる追い波の場合でも、水中翼6が水流の中にあるので、減揺効果が減少することがなく、安全性を向上できる。
【0023】
また、図3、図4のように水中翼6を船尾5の下端部の水中翼6の長さの1/10〜1/2の少し前方側や、水中翼6の厚さの1/2〜2倍の少し上または下方側に装着して、上記のようにピッチング制御することができる。水中翼6は、海面の自由境界に近い程揚力が減少し、また下端後部側程翼端の渦で船体3が抑制されるので、できるだけ船尾5部の下端前部側に設けるのが好ましい。また、水中翼6の前縁は、船体3の下面と同じ面、あるいは上記のように若干前方に位置し、水中翼6の前縁が船体3の下端面の若干前方に位置する場合には水中翼6の揚力中心を翼支持部と一致させることによって、翼の仰角を制御する力を少なくできる。
【0024】
さらに、図5のように水中翼6の揺動駆動装置9を船尾5の中央でなく、水中翼6の側部の船本体2のトンネル状部4の両側の船体3の内側部に装着して左右を同調制御するようにし、トンネル状部4を通過する高速の水流に揺動駆動装置9が当たらずに流体抵抗を低減するようにすることが好ましい。
【0025】
上記双胴船1について、水槽での実験モデルで、ジャイロセンサの姿勢制御装置12の出力をピッチング角速度ωとし、この数値積分をピッチング角θとし、水中翼6の制御角度P(t) として、P(t)=A・θ(t) +B・ω(t) +Cとして減揺制御できる。
ここに、A、B、Cは定数で、モデル実験、実機の航行時の測定、荒天時での測定など各種の試験を行なって定め、Cは走航中の航体トリムを定める値で、静水時の実験での走航抵抗が最中になるトリム角を定めておくものである。
【0026】
各種の波の状態で制御パラメータを設定して、これらのパラメータにもとづいてCPU15でジャイロセンサの姿勢制御装置12、加速度センサ13のデータから瞬時に判断して所要のパラメータに切り換えて、走航抵抗が最小になるようにジャイロセンサの姿勢制御装置12を介して揺動制御して双胴船1を所要の減揺航行を行なうようにできる。なお、上記した本発明の趣旨にもとづいて、P(t)=F(θ(t),ω(t))等としてファジー 制御、ロバスト制御等の制御方法でも実施することができる。
【実施例】
【0027】
図1、図2は、本発明の一実施例を示すもので、減揺制御の双胴船1は、両側の船体3の船尾5部間のトンネル状部4の船尾5部の対向する内側の後面下端部に翼軸支部7をそれぞれ水平に設けて水中翼6の両側部の揺動用軸8を軸着し、船尾5の中央部に油圧シリンダーの揺動駆動装置9を固着し、この揺動駆動装置9のロッド10部を固定台11を介して水中翼6の上面の中央部と連結して、船尾5部間のトンネル状部4にその全幅にわたって水中翼6を水没状態として揺動制御駆動自在に設け、水中翼6を−15度〜+15度の角度にわたって駆動制御するようにしている。
【0028】
上記水中翼6は、船本体2と比べて幅が1:2、長さが1:30、アスペクト比は通常の範囲として、図2のように船本体2のほぼ重心部に設置した船体制御部11のジャイロセンサの姿勢制御装置12および加速度センサ13を介して操作パネル14の操作によってCPU15を作動し、ディスプレイ16に表示するとともに、インバータ17を介して油圧ポンプ18を駆動制御し、コントローラ19を介して高速の比例制御弁の制御器20で油圧シリンダーの揺動駆動装置8を駆動制御し、水中翼6の揺動角度を水中翼センサーHSで検出してその出力値を船体制御部11にフィードバックし多次元PID制御して、所要の目的の仰角、俯角に多次元PID制御して双胴船1を減揺制御するようにしている。
【0029】
そのため、双胴船1の船尾5間の全幅にわたって水没状態の水中翼6によって、双胴間のトンネル状部4を流れる高速の水流を利用して揺動制御駆動して船尾5側を大きく揚力を発生して上下させて、ピッチング制御を行うことができ、双胴船1の走航抵抗が最小になるようにジャイロセンサの姿勢制御装置12を介して揺動制御して双胴船1をよりよく減揺制御して航行できる。船体3のトリムは、水中翼6の角度を手動等で調整し、速度が最高になるところをトリムとし、水中翼6はこのときの角度をニュートラル点として、上下に仰角を変えて減揺のための揚力を発生させるようにできる。
【0030】
また、図3、図4のように水中翼6を船尾5の下端部の水中翼6の長さの1/3位の少し前方側や、水中翼6の厚みの2倍の高さの少し上方側に装着することができる。水中翼6は、海面の自由境界に近い程揚力が減少し、また下端後部側程翼端の渦で船体3が抑制されるので、できるだけ下端前部側に設けることによって、より大きな揚力を発生できて好ましい。
【0031】
さらにまた、図5は、本発明のさらに他の実施例を示すもので、水中翼6の揺動駆動装置9を船尾5の中央でなく、水中翼6の側部の船本体2のトンネル状部4の両側の船体3の内側部に装着して左右を同調制御するようにしている。本実施例では、トンネル状部4を通過する高速の水流に揺動駆動装置9が当たらずに流体抵抗を低減することができ、双胴船1のより効率よく航行させることができる。
【0032】
本発明の双胴船1の水槽での実験モデルで、実機S船の25の1の模型船とし、翼長133mm、翼幅50mm、翼厚15%の対称水中翼とし、船速を2.7m/s、排水量を満載状態相当、波高3cm、波長3mの向かい波等として、上記したように水中翼6の揺動角度P(t)=A・θ(t) +B・ω(t) +Cとして入力して実験した。A、B、Cは、モデル実験、実機の航行時の測定値にもとづいてデータ送信して出力した。
【0033】
その結果、図6(a)、(b)のように、水中翼をピッチング制御しない場合(a)とピッチング制御した場合(b)のように、ピッチング制御を行なうことで、ピッチング角は3.7÷5.8=0.64で、64%に低減できた。
また、図7(a)、(b)のように、同上での上下加速度の変化も上下加速度は0.18÷0.25=0.72で、72%に上下加速度を低減できた。そのため、上記水中翼6の制御角度P(t) に加速度センサの検出値を加味することが、波高等で水中翼6を急に大きく揺動して減揺するのに有効である。
【0034】
また、船体の走航抵抗は、ピッチング制御しない場合は987gであったが、ピッチング制御した場合は699gであり、699÷987=0.71で、ほぼ30%の低減率であり、減揺装置の利用によって乗り心地の向上と燃料経済性の向上をはかることができる。一般的に、減揺装置は抵抗の増加を招くとの議論があったが、上記のようにピッチング制御することによって船体の走航トリムを抵抗が少ない状態に制御でき、その船体の抵抗減少が水中翼の動作による水中翼の増加抵抗を上回るものである。
【産業上の利用可能性】
【0035】
本発明は、旅客船、漁船、観光船等の船舶分野における減揺制御の双胴船およびその制御方法に利用できるものである。
【符号の説明】
【0036】
1…双胴船 2…船本体 3…胴体 4…トンネル状部 5…船尾
6…水中翼 9…揺動駆動装置 22…トリムタブ
【先行技術文献】
【特許文献】
【0037】
【特許文献1】特開平6−263082号公報
【特許文献2】特開平9−272488号公報
【特許請求の範囲】
【請求項1】
双胴船の両側の船体の船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御自在に設けたことを特徴とする減揺制御の双胴船。
【請求項2】
双胴船の両側の船体の船尾部間のトンネル状部の直後部にトンネル状部の全幅にわたって水中翼を設けた請求項1に記載の減揺制御の双胴船。
【請求項3】
双胴船の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の仰角を加減制御するように形成した請求項1または2に記載の減揺制御の双胴船。
【請求項4】
波の状態に応じて走航抵抗が最小になるように姿勢制御装置によって水中翼の仰角を加減制御するように形成した請求項3に記載の減揺制御の双胴船。
【請求項5】
双胴船の両側の船体の船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御駆動自在に設け、双胴船の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の仰角を加減制御して減揺することを特徴とする減揺制御の双胴船の制御方法。
【請求項1】
双胴船の両側の船体の船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御自在に設けたことを特徴とする減揺制御の双胴船。
【請求項2】
双胴船の両側の船体の船尾部間のトンネル状部の直後部にトンネル状部の全幅にわたって水中翼を設けた請求項1に記載の減揺制御の双胴船。
【請求項3】
双胴船の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の仰角を加減制御するように形成した請求項1または2に記載の減揺制御の双胴船。
【請求項4】
波の状態に応じて走航抵抗が最小になるように姿勢制御装置によって水中翼の仰角を加減制御するように形成した請求項3に記載の減揺制御の双胴船。
【請求項5】
双胴船の両側の船体の船尾部間のトンネル状部にピッチング制御のために水中翼を水没状態として揺動制御駆動自在に設け、双胴船の中心部または重心部に姿勢制御装置を配設し、ピッチングに対してピッチング角を減少させるように姿勢制御装置によって船尾部の水中翼の仰角を加減制御して減揺することを特徴とする減揺制御の双胴船の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−251596(P2011−251596A)
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願番号】特願2010−125487(P2010−125487)
【出願日】平成22年6月1日(2010.6.1)
【出願人】(591083118)ツネイシホールディングス株式会社 (18)
【出願人】(510152541)有限会社宮阪技研 (1)
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願日】平成22年6月1日(2010.6.1)
【出願人】(591083118)ツネイシホールディングス株式会社 (18)
【出願人】(510152541)有限会社宮阪技研 (1)
[ Back to top ]