
減速制御装置、方法およびプログラム
【課題】運転者が煩わしさを感じることを抑制すること。
【解決手段】車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択し、前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる。
【解決手段】車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択し、前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両を減速させる減速制御装置、方法およびプログラムに関する。
【背景技術】
【0002】
従来、回生ブレーキのみを発生させて車両を停止させる技術が知られている。例えば、特許文献1には、バッテリに対して当該バッテリの入力限界値で決定される上限の電力を充電する回生ブレーキを発生させて車両を停止させるために、回生制動開始位置を調整する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−29388号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した従来技術においては、バッテリの入力限界値で決定される上限の電力を充電する回生ブレーキを発生させるため、車両を停止させる停止位置の状況に応じた適切な減速制御を行うことができない。例えば、車両を停止させた後、停止を継続させるべき状況である場合には減速開始から停止まで長期間を費やしても運転者に煩わしさを与えることはない。しかし、車両を停止させた後、すぐに再発進可能である場合に減速開始から停止まで長期間を費やすと運転者に煩わしさを与えてしまう。
本発明は、上記課題にかんがみてなされたもので、運転者が煩わしさを感じることを抑制することが可能な技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明においては、車両を停止させるべき停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に、所定の制動期間で車両を停止させる第1減速制御を実行対象減速制御として選択する。また、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合に、第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択する。そして、実行対象減速制御を実行して停止要因に応じた停止位置にて車両を停止させる。
【0006】
すなわち、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合には、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合よりも短期間の制動期間で停止させることが可能な第2減速制御を実行対象減速制御として選択する。この構成により、停止要因が解消するタイミングが車両の運転者の運転操作に依存し、車両が早期に停止位置に到達することによって停止要因が解消し得るにもかかわらず、長期間を費やして車両を減速させる状況が発生することを防止することができる。従って、運転者が煩わしさを感じることを抑制することが可能である。
【0007】
ここで、停止要因特定手段は、車両の前方の状況に基づいて車両を停止させるべき停止要因を特定することができればよい。すなわち、車両の前方の状況には、道路の状況などの静的状況と先行車などの動的状況とが含まれ、これらの静的状況と動的状況とのそれぞれや各状況の組み合わせは車両を停止させるべき要因となり得る。そこで、停止要因特定手段においては、車両の前方の状況に対して予め停止要因を対応づけておき、停止要因を発生させるような車両の前方の状況を特定し、当該状況に対応する停止要因を特定すればよい。
【0008】
減速制御選択手段は、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に第1減速制御、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合に第2減速制御を選択することができればよい。すなわち、停止要因に応じて停止した後、早期に車両を再発進させることができる可能性がある場合に、相対的に早期に停止位置に到達する第2減速制御を選択することによって、運転者が煩わしさを感じることを抑制することができればよい。なお、停止要因が解消するタイミングが運転者の運転操作に依存する場合として、車両が停止要因に対応した停止位置に到達した時刻に応じて再発進可能になる時刻が変化する場合を想定することが可能である。また、停止要因が解消するタイミングが運転者の運転操作に依存しない場合として、車両が停止要因に対応した停止位置に到達した時刻に応じて再発進可能になる時刻が変化しない場合を想定することが可能である。
【0009】
さらに、停止要因は車両の前方の状況に応じて発生し得るが、停止要因が発生した後の車両の前方の状況によって解消し得る。また、停止要因が解消するタイミングは停止要因毎に異なり、当該停止要因が解消するタイミングが運転操作に依存するか否かは予め停止要因毎に特定することが可能である。例えば、信号機において停止信号が示されている場合、当該停止信号が示されている信号機は停止要因となるが、当該停止信号が通過許可信号に変化したことによって停止要因は解消する。当該停止要因が解消するタイミングは、信号機が示す信号の切り替えタイミングに依存するため運転者の運転操作に依存しない。また、道路上の一時停止線は停止要因となるが、一時停止線に対応した停止位置に車両を一旦停止させると停止要因は解消する。当該停止要因が解消するタイミングは、車両が停止位置に到達するタイミングに依存するため運転者の運転操作に依存する。
【0010】
そこで、停止要因毎に予め停止要因が解消するタイミングが運転者の運転操作に依存するか否かを特定して停止要因に対応づけておく。この構成によれば、減速制御選択手段によって当該対応関係を参照することによって、停止要因が解消するタイミングが運転者の運転操作に依存するか否かを特定することが可能になる。
【0011】
第1減速制御および第2減速制御は車両を減速させる際の制御方法であり、第1減速制御と第2減速制御とでは車両において減速制御を行う際に減速開始から車両停止までに要する制動期間が異なるように設定されている。すなわち、制動期間は車両に対して制動力を作用させる期間であり、当該制動期間が短いほど車両に作用させる制動力が大きくなり単位期間あたりの車速の変化が大きくなる。一般に、制動期間が短いほど単位期間あたりの消費エネルギーが大きくなるため、制動期間が短いほど燃費が悪くなる。従って、第1減速制御は、第2減速制御よりも停止までに要する期間が長いが、第2減速制御よりも燃費は良い。
【0012】
本発明においては、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に第1減速制御を実行対象減速制御として選択するため、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に、相対的に燃費が良い制御方法を選択することになる。すなわち、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合、運転者がどのような運転操作を行ったとしても停止位置において停止要因が解消するタイミングを早めることはできない。そこで、本発明においては、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に、第1減速制御を実行対象減速制御として選択する構成としており、この構成により、車両の燃費を向上させることができる。
【0013】
なお、第1減速制御および第2減速制御は、これらの減速制御を実行することによって車両を減速させることができるように規定されていればよく、制御対象となるブレーキは回生ブレーキに限定されない。従って、摩擦ブレーキなど回生ブレーキ以外のブレーキによって減速させる場合の制御方法であってもよいし、各種のブレーキの組み合わせによって減速させる場合の減速方法であってもよい。
【0014】
減速制御手段は、実行対象減速制御を実行して停止位置にて車両を停止させることができればよい。すなわち、第1減速制御や第2減速制御において制御対象とされているブレーキを制御し、第1減速制御や第2減速制御において規定された制動期間においてブレーキによる制動力を調整して制動期間の終了時点で車両を停止させることができればよい。
【0015】
さらに、回生制動部においてバッテリに対して電力を充電する回生ブレーキを発生させて停止要因に応じた停止位置に車両を停止させる構成において、バッテリの性能を低下させることなく連続して充電可能な連続充電電力を充電する回生ブレーキを発生させて減速を行う減速制御を第1減速制御とし、連続充電電力よりも大きい電力を充電する回生ブレーキを発生させて減速を行う減速制御を第2減速制御とする構成を採用してもよい。
【0016】
すなわち、第1減速制御においてバッテリに充電する目標電力を連続充電電力とすることにより、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に、バッテリの性能劣化を抑制した状態で減速を行うことが可能になる。一方、第2減速制御において連続充電電力よりも大きい電力を目標電力とすることにより、第1減速制御よりも車両に作用する制動力を大きくすることが可能になり、第1減速制御よりも短い制動期間にて車両を停止させることが可能になる。また、この構成により、第1減速制御の方が第2減速制御よりも高い効率でエネルギーを回収することが可能になり、第1減速制御の方が良い燃費となる。
【0017】
さらに、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に通常は第1減速制御を実行対象減速制御として選択し、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合に通常は第2減速制御を実行対象減速制御として選択する構成としつつ、特定の状況下においては通常の選択と異なる減速制御を実行対象減速制御として選択してもよい。例えば、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合であっても、車両の減速開始から停止までの期間を短くすべき状況である場合には、第2減速制御を実行対象減速制御として選択する構成を採用可能である。
【0018】
すなわち、車両の減速開始から停止までの期間を短くすべき状況であるにもかかわらず長い制動期間で車両を停止させると、当該車両の減速開始から停止までの期間を短くすべき状況に対応できない。そこで、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合であっても、車両の減速開始から停止までの期間を短くすべき状況である場合には、第2減速制御を実行対象減速制御として選択することにより、車両の減速開始から停止までの期間を短くすべき状況において過度に長い制動期間で車両を停止させることを防止することが可能である。
【0019】
車両の減速開始から停止までの期間を短くすべき状況は、各種の状況を想定可能であり、運転者の意志や車両の周囲の車両などによって特定される状況を想定可能である。例えば、運転者自身が早期に車両を停止させることを意図している場合に長い制動期間で車両を停止させると運転者に煩わしさを感じさせてしまうが、この場合に第2減速制御を実行対象減速制御として選択すれば、運転者に煩わしさを感じさせることはない。
【0020】
さらに、車両の周囲の車両として後続車を想定した場合、車両と後続車との距離が所定距離以下である場合に、車両の減速開始から停止までの期間を短くすべき状況であるとみなす構成を採用可能である。すなわち、車両と後続車との距離が所定距離以下である場合に車両における制動期間を長くすると、車両と後続車との距離が過度に短くなる可能性がある。そこで、車両の後方の状況に基づいて後続車と車両との距離を特定し、当該距離が所定距離以下である場合に車両の減速開始から停止までの期間を短くすべき状況であると判定する構成を採用すれば、車両と後続車との距離が過度に短くなることを防止することが可能になる。
【0021】
さらに、本発明のように停止要因が解消するタイミングの運転操作への依存性に応じて減速制御の手法を選択する手法は、方法やプログラムとしても適用可能である。また、以上のような装置、方法、プログラムは、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0022】
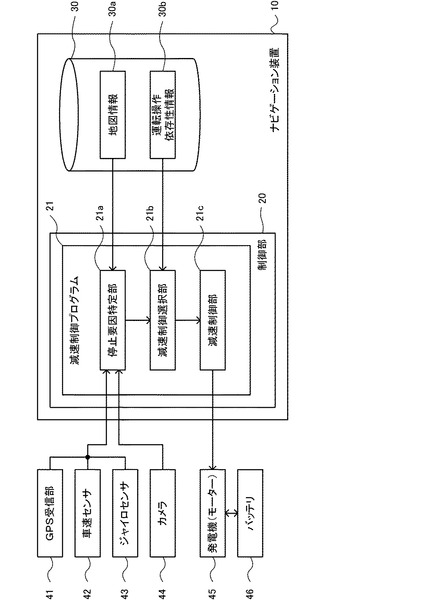
【図1】減速制御装置を含むナビゲーション装置のブロック図である。
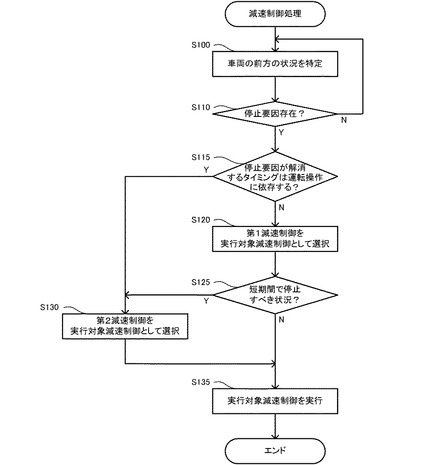
【図2】減速制御処理を示すフローチャートである。
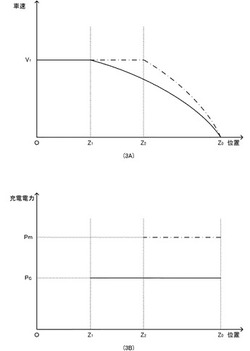
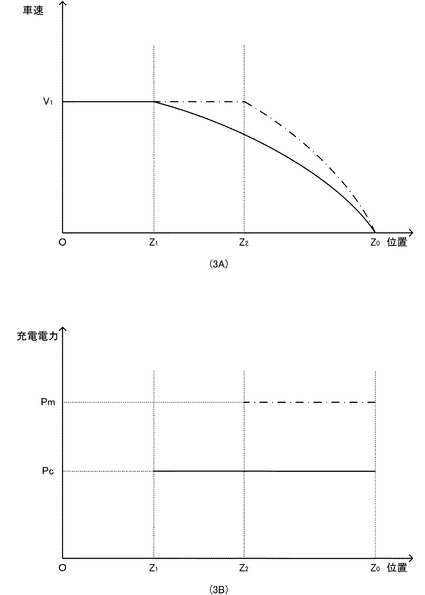
【図3】(3A)は車速の推移を模式的に示す図であり、(3B)は目標充電電力の例を示す図である。
【発明を実施するための形態】
【0023】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーション装置の構成:
(2)減速制御処理:
(3)他の実施形態:
【0024】
(1)ナビゲーション装置の構成:
図1は、本発明にかかる減速制御装置を含むナビゲーション装置10の構成を示すブロック図である。ナビゲーション装置10は、CPU,RAM,ROM等を備える制御部20、記録媒体30を備えており、記録媒体30やROMに記憶されたプログラムを制御部20で実行することが可能である。本実施形態においては、このプログラムとして減速制御プログラム21を実行可能である。
【0025】
本実施形態における車両は、GPS受信部41と車速センサ42とジャイロセンサ43とカメラ44と発電機45とバッテリ46とを備えており、各部を必要に応じて利用して制御部20が減速制御プログラム21による機能を実現する。
【0026】
GPS受信部41は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための情報を出力する。制御部20は、この信号を取得して車両の現在位置を取得する。車速センサ42は、車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車両の現在車速を取得する。ジャイロセンサ43は、車両に作用する角速度に対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、車両の走行方向を取得する。車速センサ42およびジャイロセンサ43は、GPS受信部41の出力信号から特定される車両の現在位置を補正するなどのために利用される。また、車両の現在位置は、当該車両の走行軌跡に基づいて適宜補正される。
【0027】
カメラ44は、車両の周囲(本例においては車両の前方および後方)を視野に含むように車両に対して取り付けられており、撮影した画像を示す画像データを出力する。制御部20は、図示しないインタフェースを介してこの画像データを取得して画像変換し、車両の前方に直接的あるいは間接的に停止要因となる地物(歩行者、自転車、先行車、停止信号を示している信号機等)が存在するか否かを判定する。
【0028】
発電機45は、回転子を備えるとともに当該回転子が図示しないギアを介して車輪を駆動する車軸に接続されており、車輪の回転に応じて発電機45の回転子が回転することによって発電し、発電した電力によってバッテリ46を充電する装置である。発電機45は図示しないインタフェースを介して制御部20と接続されており、制御部20は発電機45に対して制御信号を出力することによってその発電の状態を制御することで回生ブレーキを発生させ、その制動力を調整することが可能である。
【0029】
バッテリ46は、発電機45に接続されており、発電機45が発電した電力によって充電され、蓄電した電力を発電機45に対して供給して当該発電機45をモーターとして機能させる。すなわち、本実施形態における発電機45は、車両を駆動するモーターとしての機能も有しており、発電機45がバッテリ46から電力の供給を受けて回転すると、当該回転は図示しないギアを介して車輪に伝達されて車両が前進あるいは後進する。なお、本実施形態にかかる車両は図示しないエンジンを備えており、エンジンと、モーターとしての発電機45とのいずれかまたは双方によって駆動されるハイブリッド車両であるが、むろん、エンジンを備えない電気自動車に対して本発明を適用しても良い。
【0030】
記録媒体30には地図情報30aおよび運転操作依存性情報30bが記録されている。地図情報30aは、車両が走行する道路上に設定されたノードを示すノードデータ,ノード間の道路の形状を特定するための形状補間点データ,ノード同士の連結を示すリンクデータ,道路やその周辺に存在する地物(道路上の一時停止線や踏切、信号機、横断歩道など)の位置(座標)および種類を示すデータ等を含んでいる。本実施形態においては、地物の直前やその周囲で状況に応じて車両を停止させる必要がある場合に、車両を停止させる位置を停止位置として定義しており、地物を示すデータに停止位置を示すデータが対応付けられている。
【0031】
運転操作依存性情報30bは、停止要因と当該停止要因が解消するタイミングの車両の運転者の運転操作への依存性とを対応づけた情報である。すなわち、停止要因は、上述の地図情報30aが示す地物やカメラ44にて特定された地物の状況に対応して発生し得る、車両を停止させるべき要因である。本実施形態においては、地図情報30aが示す地物やカメラ44にて特定された地物の状況に対応した停止要因が予め定義されている。さらに、各停止要因が解消するタイミングが運転者の運転操作に依存するか否かが予め特定され、各停止要因に対応づけられている。なお、本実施形態においては、車両が停止要因に対応した停止位置に到達した時刻に応じて再発進可能になる時刻が変化する場合に、当該停止要因を、停止要因が解消するタイミングが運転者の運転操作に依存する停止要因とみなしている。また、車両が停止要因に対応した停止位置に到達した時刻に応じて再発進可能になる時刻が変化しない場合に、当該停止要因を、停止要因が解消するタイミングが運転者の運転操作に依存しない停止要因とみなしている。
【0032】
制御部20は、地図情報30a、カメラ44の出力信号、運転操作依存性情報30bを参照し、車両の前方に停止要因が存在する場合に回生ブレーキを利用した減速制御を行う。当該減速制御を行うために、減速制御プログラム21は、停止要因特定部21aと減速制御選択部21bと減速制御部21cとを備えている。
【0033】
停止要因特定部21aは、車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、GPS受信部41,車速センサ42,ジャイロセンサ43等の出力信号に基づいて車両の現在位置を特定するとともに、地図情報30aを参照して車両の前方の所定距離以内に存在する地物を特定する。また、制御部20は、カメラ44の出力信号に基づいて車両の前方の所定距離以内に存在する地物を特定する。そして、制御部20は、地図情報30aが示す地物やカメラ44にて特定された地物の状況に基づいて停止要因が車両の前方の所定距離以内に存在するか否かを判定する。
【0034】
減速制御選択部21bは、以上のように特定された停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に第1減速制御を実行対象減速制御として選択し、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合に第2減速制御を実行対象減速制御として選択する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、運転操作依存性情報30bを参照し、停止要因特定部21aにて特定された停止要因に対応づけられた運転操作への依存性を特定する。そして、停止要因特定部21aにて特定された停止要因に対して、停止要因が解消するタイミングが車両の運転者の運転操作に依存しないことを示す情報が対応づけられている場合に第1減速制御を実行対象減速制御として選択する。また、停止要因特定部21aにて特定された停止要因に対して、停止要因が解消するタイミングが車両の運転者の運転操作に依存することを示す情報が対応づけられている場合に第2減速制御を実行対象減速制御として選択する。
【0035】
本実施形態においては、第1減速制御、第2減速制御ともに回生ブレーキによって車両を減速させて停止させる制御であり、バッテリ46への目標充電電力が異なっている。すなわち、本実施形態においては、停止要因が解消するタイミングの運転操作への依存性に応じて目標充電電力を設定する構成となっている。具体的には、第1減速制御においてはバッテリ46の性能を低下させることなく連続して充電可能な連続充電電力を目標充電電力とし、第2減速制御においてはバッテリ46に対して充電可能な最大充電電力を目標充電電力としている。なお、最大充電電力はバッテリ46に対して充電可能な電力の最大値であるため、連続充電電力よりも大きい値である。
【0036】
本実施形態においては、以上のような目標充電電力の差異により、第2減速制御による減速の方が第1減速制御よりも制動期間が短く、相対的に悪い燃費となる。すなわち、回生ブレーキにおいては一般に、バッテリの充電電力が車両に作用する制動力の大きさと車速との積に等しい(あるいは比例する)とみなすことができる。このため、車速が共通であれば目標充電電力が大きいほど大きい制動力を発生させることが可能であり、共通の車速から減速を開始した場合には第2減速制御の方が大きい制動力を発生させることができる。従って、車両の車速が特定の状態において減速を開始した場合、停止させるまでに必要とされる制動期間は、第1減速制御よりも第2減速制御の方が短くなる。
【0037】
さらに、第1減速制御においては、バッテリ46の性能を低下させることなく連続して充電可能な連続充電電力を充電するため効率よくエネルギーを回収することができる。しかし、第2減速制御においては、連続充電電力よりも大きい最大充電電力で充電するためエネルギーの回収効率は第1減速制御よりも低下する。また、一般に、制動期間が短いほど単位期間あたりの消費エネルギーが大きくなる。従って、第1減速制御よりも第2減速制御の方が相対的に悪い燃費となる。
【0038】
減速制御部21cは、実行対象減速制御を実行して停止要因に応じた停止位置にて車両を停止させる機能を制御部20に実現させるモジュールである。すなわち、制御部20は、実行対象減速制御に対応した目標充電電力をバッテリ46に充電する回生ブレーキを発生させる場合の位置毎の車速の推移を特定することにより、車両を停止位置にて停止させるために減速を開始すべき減速開始位置を特定する。そして、車両の現在位置が当該減速開始位置と一致したあるいは当該減速開始位置を超えた時点から目標充電電力をバッテリ46に充電する回生ブレーキを発生させることによって停止要因に応じた停止位置で車両を停止させる。
【0039】
以上の構成によれば、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合には、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合よりも短期間の制動期間で停止させることが可能である。この構成により、停止要因が解消するタイミングが車両の運転者の運転操作に依存し、車両が早期に停止位置に到達することによって停止要因が解消し得るにもかかわらず、長期間を費やして車両を減速させる状況が発生することを防止することができる。従って、運転者が煩わしさを感じることを抑制することが可能である。さらに、停止要因が解消するタイミングが車両の運転者の運転操作に依存しないため車両が早期に停止位置に到達することによって停止要因が解消するか否かが不明である場合に、相対的に良い燃費で車両を減速させることが可能である。
【0040】
(2)減速制御処理:
次に、本実施形態にかかる減速制御処理を詳細に説明する。図2は、減速制御処理を示すフローチャートであり、当該減速制御処理は車両が走行している過程において所定期間毎(例えば、100ms毎)に実行される。なお、ここでは、運転操作依存性情報30bが表1のような情報である場合を想定して減速制御処理を説明する。
【表1】

【0041】
当該表1に示す例においては、停止要因として「一時停止線」「停止信号」「一時停止信号」「踏切(通過禁止中)」「踏切(通過許可中)」「料金所」「横断中の歩行者、自転車」「停止中の先行車」が挙げられている。すなわち、「一時停止線」は当該一時停止線の直前において車両を停止させるべきことを示す地物であり、車両の前方に一時停止線が存在する場合、当該一時停止線が停止要因となる。また、車両が一時停止線に対応した停止位置に到達して停止した後には周囲の安全を確認した後に再発進をすることが可能である。従って、停止位置に早く到達すれば早く再発進可能であり、停止要因が解消するタイミングは運転者の運転操作に依存する。このため、「一時停止線」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存することを示す情報が対応づけられる。
【0042】
「停止信号を示している信号機」は信号機において停止信号が示されている状態を示しており、車両の前方に停止信号を示している信号機が存在する場合、当該停止信号を示している信号機が停止要因となる。また、車両が停止信号を示している信号機に対応した停止位置に到達したとしても、停止信号が許可信号に変わるまで再発進することができない。従って、停止要因が解消するタイミングは運転者の運転操作に依存しない。このため、「停止信号を示している信号機」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存しないことを示す情報が対応づけられる。
【0043】
「一旦停止信号を示している信号機」は信号機において一旦停止信号が示されている状態(例えば赤信号が点滅している状態)を示しており、車両の前方に一旦停止信号を示している信号機が存在する場合、当該一旦停止信号を示している信号機が停止要因となる。また、車両が一旦停止信号を示している信号機に対応した停止位置に到達した場合、周囲の安全を確認した後に再発進をすることが可能である。従って、「一旦停止信号を示している信号機」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存することを示す情報が対応づけられる。
【0044】
「踏切(通過禁止中)」は踏切において遮断機が下りている状態を示しており、車両の前方に遮断機が下りている踏切が存在する場合、当該遮断機が下りている踏切が停止要因となる。また、車両が遮断機が下りている踏切に対応した停止位置に到達したとしても、遮断機が上がるまで再発進することができない。従って、「踏切(通過禁止中)」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存しないことを示す情報が対応づけられる。
【0045】
「踏切(通過許可中)」は踏切において遮断機が上がっている状態を示しており、車両の前方に遮断機が上がっている踏切が存在する場合、当該遮断機が上がっている踏切が停止要因となる。また、車両が遮断機が上がっている踏切に対応した停止位置に到達した場合、周囲の安全を確認した後に再発進をすることが可能である。従って、「踏切(通過許可中)」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存することを示す情報が対応づけられる。
【0046】
「料金所」は有料道路の料金所を示しており、車両の前方に有料道路の料金所が存在する場合、当該有料道路の料金所が停止要因となる。また、車両が有料道路の料金所に対応した停止位置に到達した場合、料金支払いが終了すると再発進をすることが可能である。従って、「料金所」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存することを示す情報が対応づけられる。
【0047】
「横断中の歩行者、自転車」は車両の前方の道路を横断中の歩行者あるいは自転車が存在する状態を示しており、車両の前方の道路を横断中の歩行者あるいは自転車が存在する場合、当該横断中の歩行者、自転車が停止要因となる。また、車両が横断中の歩行者、自転車に対応した停止位置に到達したとしても、横断中の歩行者、自転車と接触しない状況になるまで再発進することができない。従って、「横断中の歩行者、自転車」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存しないことを示す情報が対応づけられる。
【0048】
「停止中の先行車」は車両の前方の道路上に停止中の先行車が存在する状態を示しており、車両の前方の道路上に停止中の先行車が存在する場合、当該停止中の先行車が停止要因となる。また、車両が停止中の先行車に対応した停止位置に到達したとしても、停止中の先行車が移動しない限り再発進することができない。従って、「停止中の先行車」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存しないことを示す情報が対応づけられる。なお、車両の前方の道路上に停止中の先行車が存在する場合とは、例えば、車両の前方に、渋滞によって停止中の先行車が存在する場合や、道路を横切って曲がるために対向車が通過するまで待機している先行車が存在する場合等が挙げられる。
【0049】
図2に示す減速制御処理が開始されると、まず制御部20は、停止要因特定部21aの処理により、車両の前方の状況を特定する(ステップS100)。すなわち、制御部20は、GPS受信部41,車速センサ42,ジャイロセンサ43の出力信号に基づいて車両の現在位置を特定するとともに、地図情報30aを参照して車両の前方の所定距離以内に存在する地物を特定する。また、制御部20は、カメラ44の出力信号に基づいて車両の前方の所定距離以内に存在する地物を特定する。さらに、制御部20は、カメラ44の出力信号に基づいて当該地物の状態を特定する。すなわち、本実施形態においては、車両の前方の所定距離以内に存在する地物と地物の状態によって車両の前方の状況が特定される。
【0050】
次に、制御部20は、停止要因特定部21aの処理により、車両の前方の地物の状況に基づいて、車両の前方に停止要因が存在するか否かを判定する(ステップS110)。本実施形態においては、地物が停止要因を構成する場合と、地物が特定の状態となることによって停止要因を構成する場合とを想定しており、制御部20は、停止要因を構成する地物が車両の前方の所定距離以内に存在する場合に停止要因が存在すると判定する。例えば、上述の表1における「一時停止線」「一時停止信号を示している信号機」「料金所」は、地図情報30aに基づいて特定されるとともにこれらの地物自体が停止要因を構成する。また、上述の表1における「横断中の歩行者、自転車」「停止中の先行車」は、カメラ44の出力信号に基づいて特定されるとともにこれらの地物自体が停止要因を構成する。
【0051】
さらに、上述の表1における「停止信号を示している信号機」「踏切(通過禁止中)」「踏切(通過許可中)」は、それぞれに対応する地物の存在が地図情報30aあるいはカメラ44の出力信号に基づいて特定されるとともに当該地物の状態がカメラ44の出力信号に基づいて特定され、当該状態に基づいて当該地物が停止要因であるか否かが特定される。例えば、「信号機」については「停止信号を示している信号機」であれば停止要因となり、「通過許可信号を示している信号機」であれば停止要因とならない。「合流地点」については合流先の道路が混雑している状態であれば停止要因となり、合流先の道路が混雑していない状態であれば停止要因とならない。なお、「踏切」は遮断機の状態によらず停止要因となるが、遮断機の状態は運転操作への依存性に影響を与えるため、遮断機の状態に応じて「通過禁止中」、「通過許可中」のいずれかが特定される。
【0052】
ステップS110において、車両の前方に停止要因が存在すると判定されない場合、制御部20は、ステップS100以降の処理を繰り返す。ステップS110において、車両の前方に停止要因が存在すると判定された場合、制御部20は、減速制御選択部21bの処理により、停止要因が解消するタイミングが運転操作に依存するか否かを判定する(ステップS115)。すなわち、制御部20は、運転操作依存性情報30bを参照し、ステップS110にて車両の前方に存在すると判定された停止要因に対応づけられた、運転操作への依存性を示す情報を特定する。そして、当該運転操作への依存性を示す情報に基づいて停止要因が解消するタイミングが運転操作に依存するか否かを特定する。
【0053】
ステップS115において、停止要因が解消するタイミングが運転操作に依存すると判定されない場合(停止要因が解消するタイミングが運転操作に依存しない場合)、制御部20は、減速制御選択部21bの処理により、第1減速制御を実行対象減速制御として選択する(ステップS120)。すなわち、回生ブレーキを発生させる際の目標充電電力を連続充電電力に設定する。この結果、相対的に良い燃費で車両を減速させ、かつ相対的に長い制動期間で車両を停止させるように実行対象減速制御が設定される。
【0054】
一方、ステップS115において、停止要因が解消するタイミングが運転操作に依存すると判定された場合、制御部20は、減速制御選択部21bの処理により、第2減速制御を実行対象減速制御として選択する(ステップS130)。すなわち、回生ブレーキを発生させる際の目標充電電力を最大充電電力に設定する。この結果、相対的に悪い燃費で車両を減速させ、かつ相対的に短い制動距離で車両を停止させるように実行対象減速制御が設定される。
【0055】
以上のように、通常は、停止要因が解消するタイミングが運転操作に依存しない場合に第1減速制御が実行対象減速制御として選択され、停止要因が解消するタイミングが運転操作に依存する場合に第2減速制御が実行対象減速制御として選択される。しかし、車両の減速開始から停止までの期間を短くすべき状況であるにもかかわらず長い制動期間で車両を停止させると、当該車両の減速開始から停止までの期間を短くすべき状況に対応できない。そこで、本実施形態においては、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合であっても、車両の減速開始から停止までの期間を短くすべき状況である場合には、第2減速制御を実行対象減速制御として選択する構成としている。
【0056】
このため、ステップS120にて第1減速制御を実行対象減速制御として選択した後、制御部20は、減速制御選択部21bの処理により、短期間で停止すべき状況であるか否かを判定する(ステップS125)。本実施形態においては、車両と後続車との距離が所定距離以下である場合に、短期間で停止すべき状況であるであるとみなす。そこで、制御部20は、カメラ44の出力信号に基づいて車両の後方の状況を特定し、車両の後方に後続車が存在する場合にはカメラ44の出力信号に基づいて車両と後続車との距離を特定する。そして、車両と後続車との距離が所定距離以下である場合、制御部20は、短期間で停止すべき状況であると判定し、ステップS130を実行して第2減速制御を実行対象減速制御として選択する。車両と後続車との距離が所定距離以下でない場合には第1減速制御が実行対象減速制御として選択された状態を維持する。
【0057】
ステップS125あるいはS130の後、制御部20は、減速制御部21cの処理により、実行対象減速制御を実行する(ステップS135)。すなわち、制御部20は、目標充電電力を充電する回生ブレーキによって停止位置において車両を停止させるために減速を開始すべき減速開始位置を特定し、車両の現在位置が減速開始位置となった時点以後、車両が停止するまでの過程において、発電機45に対して制御信号を出力し、バッテリ46に対して目標充電電力を充電する回生ブレーキを発生させる自動減速制御を行う。
【0058】
図3は、減速開始位置を特定する処理の例を示す図である。図3Aにおいては、横軸に位置、縦軸に車速を示しており、目標充電電力としての連続充電電力を充電する回生ブレーキを発生させる場合の車速を実線、目標充電電力としての最大充電電力を充電する回生ブレーキを発生させる場合の車速を一点鎖線で示している。図3Bにおいては、横軸に位置、縦軸に充電電力の大きさを示しており、連続充電電力Pcを実線、最大充電電力Pmを一点鎖線で示している。また、本例においては原点Oが車両の現在位置であり、点Z0が停止位置である。
【0059】
本実施形態において、図3Aに示すような車速の推移は、目標充電電力をバッテリ46に充電する状態に対応した単位時間毎の車速および加速度の推移を特定する処理を繰り返すことによって決定される。以下、目標充電電力が連続充電電力Pcである場合について当該処理を説明する。
【0060】
この処理において、まず、制御部20は、発電機45によって連続充電電力を発生させてバッテリ46を充電している状態で車両に作用する制動力と当該車両の車速との積が連続充電電力に等しいとみなして制動力を定義する。すなわち、制御部20は、連続充電電力を車速で除した値によって車両に作用する制動力の大きさを定義する。また、当該制動力の大きさを車両の重量で除すことによって車両に作用する加速度の大きさを特定することができる。なお、本例において加速度は車両の前方を正の方向として定義されるため、減速時に車両に作用する加速度は負の加速度である。
【0061】
例えば、現在車速がV1(m/s),連続充電電力がPc(W)である場合、制御部20は、発電機45によってバッテリ46に対して連続充電電力Pcを充電している状態で車両に作用する制動力の大きさがPc/V1(N)であり、車両に作用する加速度a1が−Pc/(V1・M)(m/s2)であるとみなす。なお、ここでMは車両の重量である。さらに、制御部20は、単位時間T後における車両の位置が現在位置より(V1×T)(m)前方の位置であるとともに、当該位置における車速V2が(V1+(−(Pc/(V1・M))×T))(m/s)であるとみなす。このような処理によれば、現在位置より(V1×T)(m)前方の位置における制動力の大きさをPc/V2(N)、加速度a2を−Pc/(V2・M)(m/s2)として特定することができる。制御部20は、以上の処理を車速が0km/hになるまで繰り返す。以上の処理によれば、現在車速V1を0km/hまで減速させる際に必要な制動距離を特定することができる。
【0062】
そこで、制御部20は、停止位置Z0から進行方向後方に制動距離だけ離れた位置を減速開始位置Z1とする。すなわち、車両の現在位置が減速開始位置Z1と一致したあるいは減速開始位置Z1より前方となった時点で、制御部20は、発電機45を制御して連続充電電力Pcを充電する回生ブレーキで車両を減速させる。この結果、減速開始位置Z1より前方における車両の車速が図3Aの実線で示すように推移し、停止位置で車両を停止させることが可能になる。
【0063】
なお、以上の例は目標充電電力が連続充電電力Pcである場合であるが、目標充電電力が最大充電電力Pmである場合であっても同様の処理によって車速および加速度の推移を特定して減速開始位置Z2を特定することができる。そして、車両の現在位置が減速開始位置Z2と一致したあるいは減速開始位置Z2より前方となった時点で、制御部20が、発電機45を制御して最大充電電力Pmを充電する回生ブレーキで車両を減速させると、減速開始位置Z2より前方における車両の車速が図3Aの一点鎖線で示すように推移し、停止位置で車両を停止させることが可能になる。
【0064】
以上の処理によれば、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合に第2減速制御を実行して相対的に悪い燃費で車両を減速させ、かつ相対的に短い制動期間で車両を停止させることができる。また、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に、通常は、第1減速制御を実行して相対的に良い燃費で車両を減速させ、かつ相対的に長い制動期間で車両を停止させることができる。さらに、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合であっても、車両と後続車と距離が所定距離以下であって、車両の減速開始から停止までの期間を短くすべき状況においては第2減速制御を実行することができる。このため、過度に長い制動期間で車両を停止させることにより、車両と後続車との距離が過度に短くなることを防止することが可能になる。
【0065】
(3)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、停止要因が解消するタイミングの運転操作への依存性に応じて減速制御の手法を選択する限りにおいて、他にも種々の実施形態を採用可能である。
【0066】
例えば、停止要因は表1に示す例に限定されない。すなわち、車両の前方の状況には、道路の状況などの静的状況と先行車などの動的状況とが含まれ、これらの静的状況と動的状況とのそれぞれや各状況の組み合わせが車両を停止させるべき要因となり得る場合には、これらの各種の状況やその組み合わせを停止要因特定部21aの処理によって取得し、対応する停止要因を特定すればよい。例えば、合流地点が車両の前方に存在する場合であっても合流先の道路が混雑していない場合に必ずしも車両を停止させることが必要とされないのであれば、車両の前方に合流地点が存在するという静的状況と、合流先の道路の混雑度合いという動的状況との組み合わせによって停止要因が存在するか否かが特定される構成としてもよい。
【0067】
また、各種の状況に応じた停止要因が解消するタイミングの運転操作への依存性も表1に示す例に限定されない。例えば、車両の前方に料金所が存在する場合に当該料金所の存在が停止要因となるが、料金所に支払い待ちの車列が形成されている場合には停止要因が解消するタイミングは運転操作に依存せず、料金所に支払い待ちの車列が形成されていない場合には停止要因が解消するタイミングは運転操作に依存する。そこで、ある地物に関する静的状況と動的状況との組み合わせによって停止要因が解消するタイミングの運転操作への依存性が特定される構成としてもよい。
【0068】
さらに、上述の実施形態においては、回生ブレーキのみを発生させて車両を減速させる例を説明したが、むろん、回生ブレーキ以外のブレーキを発生させて車両を減速させる構成であってもよいし、各種のブレーキを組み合わせて車両を減速させる構成であってもよい。すなわち、各種のブレーキによって車両を制動させる場合、制動期間が短いほど車両に作用させる制動力が大きくなり単位期間あたりの車速の変化が大きくなる。また、一般に、制動期間が短いほど単位期間あたりの消費エネルギーが大きくなるため、制動期間が短いほど燃費が悪くなる。そこで、停止要因が解消するタイミングが運転操作に依存する場合に、停止要因が解消するタイミングが運転操作に依存しない場合よりも短い制動距離で減速させる構成とする。この構成によれば、停止要因が解消するタイミングが運転操作に依存する場合に運転者が煩わしさを感じることを抑制することが可能であり、停止要因が解消するタイミングが運転操作に依存しない場合に相対的に良い燃費で車両を減速させた後に停止させることが可能である。
【0069】
さらに、車両の減速開始から停止までの期間を短くすべき状況は、後続車の状況以外にも各種の状況を想定可能である。例えば、運転者の意志や車両の周囲の車両などによって特定される状況を想定可能である。より具体的には、運転者がナビゲーション装置10を操作しようとしている場合など、運転者自身が早期に車両を停止させることを意図している場合に長い制動期間で車両を停止させると運転者に煩わしさを感じさせてしまうが、この場合に第2減速制御を実行対象減速制御として選択すれば、運転者に煩わしさを感じさせることはない。
【0070】
さらに、上述の実施形態においては、一旦第1減速制御が実行対象減速制御として選択された後に、第2減速制御を実行対象減速制御として選択し直す構成であったが、一旦第2減速制御が実行対象減速制御として選択された後に、第1減速制御を実行対象減速制御として選択し直す構成としてもよい。例えば、停止要因が解消するタイミングが運転操作に依存すると判定されたことにより、一旦、第2減速制御が実行対象減速制御として選択された場合であっても、車両の減速開始から停止までの期間を短くすべき状況でない場合に第1減速制御を実行対象減速制御として選択し直す構成としてもよい。車両の減速開始から停止までの期間を短くすべき状況でない場合としては、例えば、運転者が目的地に向けて走行している過程において予想される予想到達時刻と運転者が意図している目的地への目標到着時刻との差分が所定期間以上である場合や、運転者ができるだけ良い燃費で走行することを望んでいる場合(例えば、ナビゲーション装置10が備えるインタフェースによって運転者が省エネルギー走行を行うように指示した場合)等が挙げられる。
【0071】
さらに、上述の実施形態における運転操作依存性情報30bでは、停止要因と当該停止要因の運転操作への依存性とが対応づけられていたが、運転操作への依存性と減速制御とは直接的に対応するため、停止要因と減速制御とを直接的に対応させるように運転操作依存性情報30bを定義してもよい。
【0072】
さらに、車両の前方に車両を徐行させるべき徐行要因が存在する場合に実行対象減速制御を選択する構成を採用しても良い。すなわち、車両の前方の状況に基づいて車両を徐行させるべき徐行要因を特定し、当該徐行区間の通過を完了するタイミングが車両の運転者の運転操作に依存しない場合に第1減速制御を実行対象減速制御として選択し、徐行区間の通過を完了するタイミングが車両の運転者の運転操作に依存する場合に第2減速制御を実行対象減速制御として選択する構成を採用可能である。この構成によれば、車両が早期に徐行区間を通過可能であるにもかかわらず、長期間を費やして徐行区間まで走行する状況が発生することを防止することができる。なお、徐行区間は、車速の上限値を予め決められた徐行速度以下にすべき区間として予め決められた区間である。例えば、車両の前方の信号機において徐行指示信号(例えば、黄色の点滅信号)が表示されている場合において、当該信号機から車両の進行方向後方へ所定距離内の区間を徐行区間とすることが可能である。また、車両の前方にETC(Electronic Toll Collection system)の料金所が存在する場合に、当該料金所を含む区間を徐行区間とすることが可能である。なお、以上のような徐行区間の例は、徐行区間の通過を完了するタイミングが車両の運転者の運転操作に依存する場合の例である。
【符号の説明】
【0073】
10…ナビゲーション装置、20…制御部、21…減速制御プログラム、21a…停止要因特定部、21b…減速制御選択部、21c…減速制御部、30…記録媒体、30a…地図情報、30b…運転操作依存性情報、41…GPS受信部、42…車速センサ、43…ジャイロセンサ、44…カメラ、45…発電機、46…バッテリ
【技術分野】
【0001】
本発明は、車両を減速させる減速制御装置、方法およびプログラムに関する。
【背景技術】
【0002】
従来、回生ブレーキのみを発生させて車両を停止させる技術が知られている。例えば、特許文献1には、バッテリに対して当該バッテリの入力限界値で決定される上限の電力を充電する回生ブレーキを発生させて車両を停止させるために、回生制動開始位置を調整する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−29388号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した従来技術においては、バッテリの入力限界値で決定される上限の電力を充電する回生ブレーキを発生させるため、車両を停止させる停止位置の状況に応じた適切な減速制御を行うことができない。例えば、車両を停止させた後、停止を継続させるべき状況である場合には減速開始から停止まで長期間を費やしても運転者に煩わしさを与えることはない。しかし、車両を停止させた後、すぐに再発進可能である場合に減速開始から停止まで長期間を費やすと運転者に煩わしさを与えてしまう。
本発明は、上記課題にかんがみてなされたもので、運転者が煩わしさを感じることを抑制することが可能な技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明においては、車両を停止させるべき停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に、所定の制動期間で車両を停止させる第1減速制御を実行対象減速制御として選択する。また、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合に、第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択する。そして、実行対象減速制御を実行して停止要因に応じた停止位置にて車両を停止させる。
【0006】
すなわち、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合には、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合よりも短期間の制動期間で停止させることが可能な第2減速制御を実行対象減速制御として選択する。この構成により、停止要因が解消するタイミングが車両の運転者の運転操作に依存し、車両が早期に停止位置に到達することによって停止要因が解消し得るにもかかわらず、長期間を費やして車両を減速させる状況が発生することを防止することができる。従って、運転者が煩わしさを感じることを抑制することが可能である。
【0007】
ここで、停止要因特定手段は、車両の前方の状況に基づいて車両を停止させるべき停止要因を特定することができればよい。すなわち、車両の前方の状況には、道路の状況などの静的状況と先行車などの動的状況とが含まれ、これらの静的状況と動的状況とのそれぞれや各状況の組み合わせは車両を停止させるべき要因となり得る。そこで、停止要因特定手段においては、車両の前方の状況に対して予め停止要因を対応づけておき、停止要因を発生させるような車両の前方の状況を特定し、当該状況に対応する停止要因を特定すればよい。
【0008】
減速制御選択手段は、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に第1減速制御、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合に第2減速制御を選択することができればよい。すなわち、停止要因に応じて停止した後、早期に車両を再発進させることができる可能性がある場合に、相対的に早期に停止位置に到達する第2減速制御を選択することによって、運転者が煩わしさを感じることを抑制することができればよい。なお、停止要因が解消するタイミングが運転者の運転操作に依存する場合として、車両が停止要因に対応した停止位置に到達した時刻に応じて再発進可能になる時刻が変化する場合を想定することが可能である。また、停止要因が解消するタイミングが運転者の運転操作に依存しない場合として、車両が停止要因に対応した停止位置に到達した時刻に応じて再発進可能になる時刻が変化しない場合を想定することが可能である。
【0009】
さらに、停止要因は車両の前方の状況に応じて発生し得るが、停止要因が発生した後の車両の前方の状況によって解消し得る。また、停止要因が解消するタイミングは停止要因毎に異なり、当該停止要因が解消するタイミングが運転操作に依存するか否かは予め停止要因毎に特定することが可能である。例えば、信号機において停止信号が示されている場合、当該停止信号が示されている信号機は停止要因となるが、当該停止信号が通過許可信号に変化したことによって停止要因は解消する。当該停止要因が解消するタイミングは、信号機が示す信号の切り替えタイミングに依存するため運転者の運転操作に依存しない。また、道路上の一時停止線は停止要因となるが、一時停止線に対応した停止位置に車両を一旦停止させると停止要因は解消する。当該停止要因が解消するタイミングは、車両が停止位置に到達するタイミングに依存するため運転者の運転操作に依存する。
【0010】
そこで、停止要因毎に予め停止要因が解消するタイミングが運転者の運転操作に依存するか否かを特定して停止要因に対応づけておく。この構成によれば、減速制御選択手段によって当該対応関係を参照することによって、停止要因が解消するタイミングが運転者の運転操作に依存するか否かを特定することが可能になる。
【0011】
第1減速制御および第2減速制御は車両を減速させる際の制御方法であり、第1減速制御と第2減速制御とでは車両において減速制御を行う際に減速開始から車両停止までに要する制動期間が異なるように設定されている。すなわち、制動期間は車両に対して制動力を作用させる期間であり、当該制動期間が短いほど車両に作用させる制動力が大きくなり単位期間あたりの車速の変化が大きくなる。一般に、制動期間が短いほど単位期間あたりの消費エネルギーが大きくなるため、制動期間が短いほど燃費が悪くなる。従って、第1減速制御は、第2減速制御よりも停止までに要する期間が長いが、第2減速制御よりも燃費は良い。
【0012】
本発明においては、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に第1減速制御を実行対象減速制御として選択するため、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に、相対的に燃費が良い制御方法を選択することになる。すなわち、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合、運転者がどのような運転操作を行ったとしても停止位置において停止要因が解消するタイミングを早めることはできない。そこで、本発明においては、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に、第1減速制御を実行対象減速制御として選択する構成としており、この構成により、車両の燃費を向上させることができる。
【0013】
なお、第1減速制御および第2減速制御は、これらの減速制御を実行することによって車両を減速させることができるように規定されていればよく、制御対象となるブレーキは回生ブレーキに限定されない。従って、摩擦ブレーキなど回生ブレーキ以外のブレーキによって減速させる場合の制御方法であってもよいし、各種のブレーキの組み合わせによって減速させる場合の減速方法であってもよい。
【0014】
減速制御手段は、実行対象減速制御を実行して停止位置にて車両を停止させることができればよい。すなわち、第1減速制御や第2減速制御において制御対象とされているブレーキを制御し、第1減速制御や第2減速制御において規定された制動期間においてブレーキによる制動力を調整して制動期間の終了時点で車両を停止させることができればよい。
【0015】
さらに、回生制動部においてバッテリに対して電力を充電する回生ブレーキを発生させて停止要因に応じた停止位置に車両を停止させる構成において、バッテリの性能を低下させることなく連続して充電可能な連続充電電力を充電する回生ブレーキを発生させて減速を行う減速制御を第1減速制御とし、連続充電電力よりも大きい電力を充電する回生ブレーキを発生させて減速を行う減速制御を第2減速制御とする構成を採用してもよい。
【0016】
すなわち、第1減速制御においてバッテリに充電する目標電力を連続充電電力とすることにより、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に、バッテリの性能劣化を抑制した状態で減速を行うことが可能になる。一方、第2減速制御において連続充電電力よりも大きい電力を目標電力とすることにより、第1減速制御よりも車両に作用する制動力を大きくすることが可能になり、第1減速制御よりも短い制動期間にて車両を停止させることが可能になる。また、この構成により、第1減速制御の方が第2減速制御よりも高い効率でエネルギーを回収することが可能になり、第1減速制御の方が良い燃費となる。
【0017】
さらに、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に通常は第1減速制御を実行対象減速制御として選択し、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合に通常は第2減速制御を実行対象減速制御として選択する構成としつつ、特定の状況下においては通常の選択と異なる減速制御を実行対象減速制御として選択してもよい。例えば、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合であっても、車両の減速開始から停止までの期間を短くすべき状況である場合には、第2減速制御を実行対象減速制御として選択する構成を採用可能である。
【0018】
すなわち、車両の減速開始から停止までの期間を短くすべき状況であるにもかかわらず長い制動期間で車両を停止させると、当該車両の減速開始から停止までの期間を短くすべき状況に対応できない。そこで、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合であっても、車両の減速開始から停止までの期間を短くすべき状況である場合には、第2減速制御を実行対象減速制御として選択することにより、車両の減速開始から停止までの期間を短くすべき状況において過度に長い制動期間で車両を停止させることを防止することが可能である。
【0019】
車両の減速開始から停止までの期間を短くすべき状況は、各種の状況を想定可能であり、運転者の意志や車両の周囲の車両などによって特定される状況を想定可能である。例えば、運転者自身が早期に車両を停止させることを意図している場合に長い制動期間で車両を停止させると運転者に煩わしさを感じさせてしまうが、この場合に第2減速制御を実行対象減速制御として選択すれば、運転者に煩わしさを感じさせることはない。
【0020】
さらに、車両の周囲の車両として後続車を想定した場合、車両と後続車との距離が所定距離以下である場合に、車両の減速開始から停止までの期間を短くすべき状況であるとみなす構成を採用可能である。すなわち、車両と後続車との距離が所定距離以下である場合に車両における制動期間を長くすると、車両と後続車との距離が過度に短くなる可能性がある。そこで、車両の後方の状況に基づいて後続車と車両との距離を特定し、当該距離が所定距離以下である場合に車両の減速開始から停止までの期間を短くすべき状況であると判定する構成を採用すれば、車両と後続車との距離が過度に短くなることを防止することが可能になる。
【0021】
さらに、本発明のように停止要因が解消するタイミングの運転操作への依存性に応じて減速制御の手法を選択する手法は、方法やプログラムとしても適用可能である。また、以上のような装置、方法、プログラムは、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0022】
【図1】減速制御装置を含むナビゲーション装置のブロック図である。
【図2】減速制御処理を示すフローチャートである。
【図3】(3A)は車速の推移を模式的に示す図であり、(3B)は目標充電電力の例を示す図である。
【発明を実施するための形態】
【0023】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーション装置の構成:
(2)減速制御処理:
(3)他の実施形態:
【0024】
(1)ナビゲーション装置の構成:
図1は、本発明にかかる減速制御装置を含むナビゲーション装置10の構成を示すブロック図である。ナビゲーション装置10は、CPU,RAM,ROM等を備える制御部20、記録媒体30を備えており、記録媒体30やROMに記憶されたプログラムを制御部20で実行することが可能である。本実施形態においては、このプログラムとして減速制御プログラム21を実行可能である。
【0025】
本実施形態における車両は、GPS受信部41と車速センサ42とジャイロセンサ43とカメラ44と発電機45とバッテリ46とを備えており、各部を必要に応じて利用して制御部20が減速制御プログラム21による機能を実現する。
【0026】
GPS受信部41は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための情報を出力する。制御部20は、この信号を取得して車両の現在位置を取得する。車速センサ42は、車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、車両の現在車速を取得する。ジャイロセンサ43は、車両に作用する角速度に対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、車両の走行方向を取得する。車速センサ42およびジャイロセンサ43は、GPS受信部41の出力信号から特定される車両の現在位置を補正するなどのために利用される。また、車両の現在位置は、当該車両の走行軌跡に基づいて適宜補正される。
【0027】
カメラ44は、車両の周囲(本例においては車両の前方および後方)を視野に含むように車両に対して取り付けられており、撮影した画像を示す画像データを出力する。制御部20は、図示しないインタフェースを介してこの画像データを取得して画像変換し、車両の前方に直接的あるいは間接的に停止要因となる地物(歩行者、自転車、先行車、停止信号を示している信号機等)が存在するか否かを判定する。
【0028】
発電機45は、回転子を備えるとともに当該回転子が図示しないギアを介して車輪を駆動する車軸に接続されており、車輪の回転に応じて発電機45の回転子が回転することによって発電し、発電した電力によってバッテリ46を充電する装置である。発電機45は図示しないインタフェースを介して制御部20と接続されており、制御部20は発電機45に対して制御信号を出力することによってその発電の状態を制御することで回生ブレーキを発生させ、その制動力を調整することが可能である。
【0029】
バッテリ46は、発電機45に接続されており、発電機45が発電した電力によって充電され、蓄電した電力を発電機45に対して供給して当該発電機45をモーターとして機能させる。すなわち、本実施形態における発電機45は、車両を駆動するモーターとしての機能も有しており、発電機45がバッテリ46から電力の供給を受けて回転すると、当該回転は図示しないギアを介して車輪に伝達されて車両が前進あるいは後進する。なお、本実施形態にかかる車両は図示しないエンジンを備えており、エンジンと、モーターとしての発電機45とのいずれかまたは双方によって駆動されるハイブリッド車両であるが、むろん、エンジンを備えない電気自動車に対して本発明を適用しても良い。
【0030】
記録媒体30には地図情報30aおよび運転操作依存性情報30bが記録されている。地図情報30aは、車両が走行する道路上に設定されたノードを示すノードデータ,ノード間の道路の形状を特定するための形状補間点データ,ノード同士の連結を示すリンクデータ,道路やその周辺に存在する地物(道路上の一時停止線や踏切、信号機、横断歩道など)の位置(座標)および種類を示すデータ等を含んでいる。本実施形態においては、地物の直前やその周囲で状況に応じて車両を停止させる必要がある場合に、車両を停止させる位置を停止位置として定義しており、地物を示すデータに停止位置を示すデータが対応付けられている。
【0031】
運転操作依存性情報30bは、停止要因と当該停止要因が解消するタイミングの車両の運転者の運転操作への依存性とを対応づけた情報である。すなわち、停止要因は、上述の地図情報30aが示す地物やカメラ44にて特定された地物の状況に対応して発生し得る、車両を停止させるべき要因である。本実施形態においては、地図情報30aが示す地物やカメラ44にて特定された地物の状況に対応した停止要因が予め定義されている。さらに、各停止要因が解消するタイミングが運転者の運転操作に依存するか否かが予め特定され、各停止要因に対応づけられている。なお、本実施形態においては、車両が停止要因に対応した停止位置に到達した時刻に応じて再発進可能になる時刻が変化する場合に、当該停止要因を、停止要因が解消するタイミングが運転者の運転操作に依存する停止要因とみなしている。また、車両が停止要因に対応した停止位置に到達した時刻に応じて再発進可能になる時刻が変化しない場合に、当該停止要因を、停止要因が解消するタイミングが運転者の運転操作に依存しない停止要因とみなしている。
【0032】
制御部20は、地図情報30a、カメラ44の出力信号、運転操作依存性情報30bを参照し、車両の前方に停止要因が存在する場合に回生ブレーキを利用した減速制御を行う。当該減速制御を行うために、減速制御プログラム21は、停止要因特定部21aと減速制御選択部21bと減速制御部21cとを備えている。
【0033】
停止要因特定部21aは、車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、GPS受信部41,車速センサ42,ジャイロセンサ43等の出力信号に基づいて車両の現在位置を特定するとともに、地図情報30aを参照して車両の前方の所定距離以内に存在する地物を特定する。また、制御部20は、カメラ44の出力信号に基づいて車両の前方の所定距離以内に存在する地物を特定する。そして、制御部20は、地図情報30aが示す地物やカメラ44にて特定された地物の状況に基づいて停止要因が車両の前方の所定距離以内に存在するか否かを判定する。
【0034】
減速制御選択部21bは、以上のように特定された停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に第1減速制御を実行対象減速制御として選択し、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合に第2減速制御を実行対象減速制御として選択する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、運転操作依存性情報30bを参照し、停止要因特定部21aにて特定された停止要因に対応づけられた運転操作への依存性を特定する。そして、停止要因特定部21aにて特定された停止要因に対して、停止要因が解消するタイミングが車両の運転者の運転操作に依存しないことを示す情報が対応づけられている場合に第1減速制御を実行対象減速制御として選択する。また、停止要因特定部21aにて特定された停止要因に対して、停止要因が解消するタイミングが車両の運転者の運転操作に依存することを示す情報が対応づけられている場合に第2減速制御を実行対象減速制御として選択する。
【0035】
本実施形態においては、第1減速制御、第2減速制御ともに回生ブレーキによって車両を減速させて停止させる制御であり、バッテリ46への目標充電電力が異なっている。すなわち、本実施形態においては、停止要因が解消するタイミングの運転操作への依存性に応じて目標充電電力を設定する構成となっている。具体的には、第1減速制御においてはバッテリ46の性能を低下させることなく連続して充電可能な連続充電電力を目標充電電力とし、第2減速制御においてはバッテリ46に対して充電可能な最大充電電力を目標充電電力としている。なお、最大充電電力はバッテリ46に対して充電可能な電力の最大値であるため、連続充電電力よりも大きい値である。
【0036】
本実施形態においては、以上のような目標充電電力の差異により、第2減速制御による減速の方が第1減速制御よりも制動期間が短く、相対的に悪い燃費となる。すなわち、回生ブレーキにおいては一般に、バッテリの充電電力が車両に作用する制動力の大きさと車速との積に等しい(あるいは比例する)とみなすことができる。このため、車速が共通であれば目標充電電力が大きいほど大きい制動力を発生させることが可能であり、共通の車速から減速を開始した場合には第2減速制御の方が大きい制動力を発生させることができる。従って、車両の車速が特定の状態において減速を開始した場合、停止させるまでに必要とされる制動期間は、第1減速制御よりも第2減速制御の方が短くなる。
【0037】
さらに、第1減速制御においては、バッテリ46の性能を低下させることなく連続して充電可能な連続充電電力を充電するため効率よくエネルギーを回収することができる。しかし、第2減速制御においては、連続充電電力よりも大きい最大充電電力で充電するためエネルギーの回収効率は第1減速制御よりも低下する。また、一般に、制動期間が短いほど単位期間あたりの消費エネルギーが大きくなる。従って、第1減速制御よりも第2減速制御の方が相対的に悪い燃費となる。
【0038】
減速制御部21cは、実行対象減速制御を実行して停止要因に応じた停止位置にて車両を停止させる機能を制御部20に実現させるモジュールである。すなわち、制御部20は、実行対象減速制御に対応した目標充電電力をバッテリ46に充電する回生ブレーキを発生させる場合の位置毎の車速の推移を特定することにより、車両を停止位置にて停止させるために減速を開始すべき減速開始位置を特定する。そして、車両の現在位置が当該減速開始位置と一致したあるいは当該減速開始位置を超えた時点から目標充電電力をバッテリ46に充電する回生ブレーキを発生させることによって停止要因に応じた停止位置で車両を停止させる。
【0039】
以上の構成によれば、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合には、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合よりも短期間の制動期間で停止させることが可能である。この構成により、停止要因が解消するタイミングが車両の運転者の運転操作に依存し、車両が早期に停止位置に到達することによって停止要因が解消し得るにもかかわらず、長期間を費やして車両を減速させる状況が発生することを防止することができる。従って、運転者が煩わしさを感じることを抑制することが可能である。さらに、停止要因が解消するタイミングが車両の運転者の運転操作に依存しないため車両が早期に停止位置に到達することによって停止要因が解消するか否かが不明である場合に、相対的に良い燃費で車両を減速させることが可能である。
【0040】
(2)減速制御処理:
次に、本実施形態にかかる減速制御処理を詳細に説明する。図2は、減速制御処理を示すフローチャートであり、当該減速制御処理は車両が走行している過程において所定期間毎(例えば、100ms毎)に実行される。なお、ここでは、運転操作依存性情報30bが表1のような情報である場合を想定して減速制御処理を説明する。
【表1】
【0041】
当該表1に示す例においては、停止要因として「一時停止線」「停止信号」「一時停止信号」「踏切(通過禁止中)」「踏切(通過許可中)」「料金所」「横断中の歩行者、自転車」「停止中の先行車」が挙げられている。すなわち、「一時停止線」は当該一時停止線の直前において車両を停止させるべきことを示す地物であり、車両の前方に一時停止線が存在する場合、当該一時停止線が停止要因となる。また、車両が一時停止線に対応した停止位置に到達して停止した後には周囲の安全を確認した後に再発進をすることが可能である。従って、停止位置に早く到達すれば早く再発進可能であり、停止要因が解消するタイミングは運転者の運転操作に依存する。このため、「一時停止線」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存することを示す情報が対応づけられる。
【0042】
「停止信号を示している信号機」は信号機において停止信号が示されている状態を示しており、車両の前方に停止信号を示している信号機が存在する場合、当該停止信号を示している信号機が停止要因となる。また、車両が停止信号を示している信号機に対応した停止位置に到達したとしても、停止信号が許可信号に変わるまで再発進することができない。従って、停止要因が解消するタイミングは運転者の運転操作に依存しない。このため、「停止信号を示している信号機」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存しないことを示す情報が対応づけられる。
【0043】
「一旦停止信号を示している信号機」は信号機において一旦停止信号が示されている状態(例えば赤信号が点滅している状態)を示しており、車両の前方に一旦停止信号を示している信号機が存在する場合、当該一旦停止信号を示している信号機が停止要因となる。また、車両が一旦停止信号を示している信号機に対応した停止位置に到達した場合、周囲の安全を確認した後に再発進をすることが可能である。従って、「一旦停止信号を示している信号機」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存することを示す情報が対応づけられる。
【0044】
「踏切(通過禁止中)」は踏切において遮断機が下りている状態を示しており、車両の前方に遮断機が下りている踏切が存在する場合、当該遮断機が下りている踏切が停止要因となる。また、車両が遮断機が下りている踏切に対応した停止位置に到達したとしても、遮断機が上がるまで再発進することができない。従って、「踏切(通過禁止中)」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存しないことを示す情報が対応づけられる。
【0045】
「踏切(通過許可中)」は踏切において遮断機が上がっている状態を示しており、車両の前方に遮断機が上がっている踏切が存在する場合、当該遮断機が上がっている踏切が停止要因となる。また、車両が遮断機が上がっている踏切に対応した停止位置に到達した場合、周囲の安全を確認した後に再発進をすることが可能である。従って、「踏切(通過許可中)」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存することを示す情報が対応づけられる。
【0046】
「料金所」は有料道路の料金所を示しており、車両の前方に有料道路の料金所が存在する場合、当該有料道路の料金所が停止要因となる。また、車両が有料道路の料金所に対応した停止位置に到達した場合、料金支払いが終了すると再発進をすることが可能である。従って、「料金所」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存することを示す情報が対応づけられる。
【0047】
「横断中の歩行者、自転車」は車両の前方の道路を横断中の歩行者あるいは自転車が存在する状態を示しており、車両の前方の道路を横断中の歩行者あるいは自転車が存在する場合、当該横断中の歩行者、自転車が停止要因となる。また、車両が横断中の歩行者、自転車に対応した停止位置に到達したとしても、横断中の歩行者、自転車と接触しない状況になるまで再発進することができない。従って、「横断中の歩行者、自転車」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存しないことを示す情報が対応づけられる。
【0048】
「停止中の先行車」は車両の前方の道路上に停止中の先行車が存在する状態を示しており、車両の前方の道路上に停止中の先行車が存在する場合、当該停止中の先行車が停止要因となる。また、車両が停止中の先行車に対応した停止位置に到達したとしても、停止中の先行車が移動しない限り再発進することができない。従って、「停止中の先行車」に対しては、表1に示すように、停止要因が解消するタイミングが運転者の運転操作に依存しないことを示す情報が対応づけられる。なお、車両の前方の道路上に停止中の先行車が存在する場合とは、例えば、車両の前方に、渋滞によって停止中の先行車が存在する場合や、道路を横切って曲がるために対向車が通過するまで待機している先行車が存在する場合等が挙げられる。
【0049】
図2に示す減速制御処理が開始されると、まず制御部20は、停止要因特定部21aの処理により、車両の前方の状況を特定する(ステップS100)。すなわち、制御部20は、GPS受信部41,車速センサ42,ジャイロセンサ43の出力信号に基づいて車両の現在位置を特定するとともに、地図情報30aを参照して車両の前方の所定距離以内に存在する地物を特定する。また、制御部20は、カメラ44の出力信号に基づいて車両の前方の所定距離以内に存在する地物を特定する。さらに、制御部20は、カメラ44の出力信号に基づいて当該地物の状態を特定する。すなわち、本実施形態においては、車両の前方の所定距離以内に存在する地物と地物の状態によって車両の前方の状況が特定される。
【0050】
次に、制御部20は、停止要因特定部21aの処理により、車両の前方の地物の状況に基づいて、車両の前方に停止要因が存在するか否かを判定する(ステップS110)。本実施形態においては、地物が停止要因を構成する場合と、地物が特定の状態となることによって停止要因を構成する場合とを想定しており、制御部20は、停止要因を構成する地物が車両の前方の所定距離以内に存在する場合に停止要因が存在すると判定する。例えば、上述の表1における「一時停止線」「一時停止信号を示している信号機」「料金所」は、地図情報30aに基づいて特定されるとともにこれらの地物自体が停止要因を構成する。また、上述の表1における「横断中の歩行者、自転車」「停止中の先行車」は、カメラ44の出力信号に基づいて特定されるとともにこれらの地物自体が停止要因を構成する。
【0051】
さらに、上述の表1における「停止信号を示している信号機」「踏切(通過禁止中)」「踏切(通過許可中)」は、それぞれに対応する地物の存在が地図情報30aあるいはカメラ44の出力信号に基づいて特定されるとともに当該地物の状態がカメラ44の出力信号に基づいて特定され、当該状態に基づいて当該地物が停止要因であるか否かが特定される。例えば、「信号機」については「停止信号を示している信号機」であれば停止要因となり、「通過許可信号を示している信号機」であれば停止要因とならない。「合流地点」については合流先の道路が混雑している状態であれば停止要因となり、合流先の道路が混雑していない状態であれば停止要因とならない。なお、「踏切」は遮断機の状態によらず停止要因となるが、遮断機の状態は運転操作への依存性に影響を与えるため、遮断機の状態に応じて「通過禁止中」、「通過許可中」のいずれかが特定される。
【0052】
ステップS110において、車両の前方に停止要因が存在すると判定されない場合、制御部20は、ステップS100以降の処理を繰り返す。ステップS110において、車両の前方に停止要因が存在すると判定された場合、制御部20は、減速制御選択部21bの処理により、停止要因が解消するタイミングが運転操作に依存するか否かを判定する(ステップS115)。すなわち、制御部20は、運転操作依存性情報30bを参照し、ステップS110にて車両の前方に存在すると判定された停止要因に対応づけられた、運転操作への依存性を示す情報を特定する。そして、当該運転操作への依存性を示す情報に基づいて停止要因が解消するタイミングが運転操作に依存するか否かを特定する。
【0053】
ステップS115において、停止要因が解消するタイミングが運転操作に依存すると判定されない場合(停止要因が解消するタイミングが運転操作に依存しない場合)、制御部20は、減速制御選択部21bの処理により、第1減速制御を実行対象減速制御として選択する(ステップS120)。すなわち、回生ブレーキを発生させる際の目標充電電力を連続充電電力に設定する。この結果、相対的に良い燃費で車両を減速させ、かつ相対的に長い制動期間で車両を停止させるように実行対象減速制御が設定される。
【0054】
一方、ステップS115において、停止要因が解消するタイミングが運転操作に依存すると判定された場合、制御部20は、減速制御選択部21bの処理により、第2減速制御を実行対象減速制御として選択する(ステップS130)。すなわち、回生ブレーキを発生させる際の目標充電電力を最大充電電力に設定する。この結果、相対的に悪い燃費で車両を減速させ、かつ相対的に短い制動距離で車両を停止させるように実行対象減速制御が設定される。
【0055】
以上のように、通常は、停止要因が解消するタイミングが運転操作に依存しない場合に第1減速制御が実行対象減速制御として選択され、停止要因が解消するタイミングが運転操作に依存する場合に第2減速制御が実行対象減速制御として選択される。しかし、車両の減速開始から停止までの期間を短くすべき状況であるにもかかわらず長い制動期間で車両を停止させると、当該車両の減速開始から停止までの期間を短くすべき状況に対応できない。そこで、本実施形態においては、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合であっても、車両の減速開始から停止までの期間を短くすべき状況である場合には、第2減速制御を実行対象減速制御として選択する構成としている。
【0056】
このため、ステップS120にて第1減速制御を実行対象減速制御として選択した後、制御部20は、減速制御選択部21bの処理により、短期間で停止すべき状況であるか否かを判定する(ステップS125)。本実施形態においては、車両と後続車との距離が所定距離以下である場合に、短期間で停止すべき状況であるであるとみなす。そこで、制御部20は、カメラ44の出力信号に基づいて車両の後方の状況を特定し、車両の後方に後続車が存在する場合にはカメラ44の出力信号に基づいて車両と後続車との距離を特定する。そして、車両と後続車との距離が所定距離以下である場合、制御部20は、短期間で停止すべき状況であると判定し、ステップS130を実行して第2減速制御を実行対象減速制御として選択する。車両と後続車との距離が所定距離以下でない場合には第1減速制御が実行対象減速制御として選択された状態を維持する。
【0057】
ステップS125あるいはS130の後、制御部20は、減速制御部21cの処理により、実行対象減速制御を実行する(ステップS135)。すなわち、制御部20は、目標充電電力を充電する回生ブレーキによって停止位置において車両を停止させるために減速を開始すべき減速開始位置を特定し、車両の現在位置が減速開始位置となった時点以後、車両が停止するまでの過程において、発電機45に対して制御信号を出力し、バッテリ46に対して目標充電電力を充電する回生ブレーキを発生させる自動減速制御を行う。
【0058】
図3は、減速開始位置を特定する処理の例を示す図である。図3Aにおいては、横軸に位置、縦軸に車速を示しており、目標充電電力としての連続充電電力を充電する回生ブレーキを発生させる場合の車速を実線、目標充電電力としての最大充電電力を充電する回生ブレーキを発生させる場合の車速を一点鎖線で示している。図3Bにおいては、横軸に位置、縦軸に充電電力の大きさを示しており、連続充電電力Pcを実線、最大充電電力Pmを一点鎖線で示している。また、本例においては原点Oが車両の現在位置であり、点Z0が停止位置である。
【0059】
本実施形態において、図3Aに示すような車速の推移は、目標充電電力をバッテリ46に充電する状態に対応した単位時間毎の車速および加速度の推移を特定する処理を繰り返すことによって決定される。以下、目標充電電力が連続充電電力Pcである場合について当該処理を説明する。
【0060】
この処理において、まず、制御部20は、発電機45によって連続充電電力を発生させてバッテリ46を充電している状態で車両に作用する制動力と当該車両の車速との積が連続充電電力に等しいとみなして制動力を定義する。すなわち、制御部20は、連続充電電力を車速で除した値によって車両に作用する制動力の大きさを定義する。また、当該制動力の大きさを車両の重量で除すことによって車両に作用する加速度の大きさを特定することができる。なお、本例において加速度は車両の前方を正の方向として定義されるため、減速時に車両に作用する加速度は負の加速度である。
【0061】
例えば、現在車速がV1(m/s),連続充電電力がPc(W)である場合、制御部20は、発電機45によってバッテリ46に対して連続充電電力Pcを充電している状態で車両に作用する制動力の大きさがPc/V1(N)であり、車両に作用する加速度a1が−Pc/(V1・M)(m/s2)であるとみなす。なお、ここでMは車両の重量である。さらに、制御部20は、単位時間T後における車両の位置が現在位置より(V1×T)(m)前方の位置であるとともに、当該位置における車速V2が(V1+(−(Pc/(V1・M))×T))(m/s)であるとみなす。このような処理によれば、現在位置より(V1×T)(m)前方の位置における制動力の大きさをPc/V2(N)、加速度a2を−Pc/(V2・M)(m/s2)として特定することができる。制御部20は、以上の処理を車速が0km/hになるまで繰り返す。以上の処理によれば、現在車速V1を0km/hまで減速させる際に必要な制動距離を特定することができる。
【0062】
そこで、制御部20は、停止位置Z0から進行方向後方に制動距離だけ離れた位置を減速開始位置Z1とする。すなわち、車両の現在位置が減速開始位置Z1と一致したあるいは減速開始位置Z1より前方となった時点で、制御部20は、発電機45を制御して連続充電電力Pcを充電する回生ブレーキで車両を減速させる。この結果、減速開始位置Z1より前方における車両の車速が図3Aの実線で示すように推移し、停止位置で車両を停止させることが可能になる。
【0063】
なお、以上の例は目標充電電力が連続充電電力Pcである場合であるが、目標充電電力が最大充電電力Pmである場合であっても同様の処理によって車速および加速度の推移を特定して減速開始位置Z2を特定することができる。そして、車両の現在位置が減速開始位置Z2と一致したあるいは減速開始位置Z2より前方となった時点で、制御部20が、発電機45を制御して最大充電電力Pmを充電する回生ブレーキで車両を減速させると、減速開始位置Z2より前方における車両の車速が図3Aの一点鎖線で示すように推移し、停止位置で車両を停止させることが可能になる。
【0064】
以上の処理によれば、停止要因が解消するタイミングが車両の運転者の運転操作に依存する場合に第2減速制御を実行して相対的に悪い燃費で車両を減速させ、かつ相対的に短い制動期間で車両を停止させることができる。また、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合に、通常は、第1減速制御を実行して相対的に良い燃費で車両を減速させ、かつ相対的に長い制動期間で車両を停止させることができる。さらに、停止要因が解消するタイミングが車両の運転者の運転操作に依存しない場合であっても、車両と後続車と距離が所定距離以下であって、車両の減速開始から停止までの期間を短くすべき状況においては第2減速制御を実行することができる。このため、過度に長い制動期間で車両を停止させることにより、車両と後続車との距離が過度に短くなることを防止することが可能になる。
【0065】
(3)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、停止要因が解消するタイミングの運転操作への依存性に応じて減速制御の手法を選択する限りにおいて、他にも種々の実施形態を採用可能である。
【0066】
例えば、停止要因は表1に示す例に限定されない。すなわち、車両の前方の状況には、道路の状況などの静的状況と先行車などの動的状況とが含まれ、これらの静的状況と動的状況とのそれぞれや各状況の組み合わせが車両を停止させるべき要因となり得る場合には、これらの各種の状況やその組み合わせを停止要因特定部21aの処理によって取得し、対応する停止要因を特定すればよい。例えば、合流地点が車両の前方に存在する場合であっても合流先の道路が混雑していない場合に必ずしも車両を停止させることが必要とされないのであれば、車両の前方に合流地点が存在するという静的状況と、合流先の道路の混雑度合いという動的状況との組み合わせによって停止要因が存在するか否かが特定される構成としてもよい。
【0067】
また、各種の状況に応じた停止要因が解消するタイミングの運転操作への依存性も表1に示す例に限定されない。例えば、車両の前方に料金所が存在する場合に当該料金所の存在が停止要因となるが、料金所に支払い待ちの車列が形成されている場合には停止要因が解消するタイミングは運転操作に依存せず、料金所に支払い待ちの車列が形成されていない場合には停止要因が解消するタイミングは運転操作に依存する。そこで、ある地物に関する静的状況と動的状況との組み合わせによって停止要因が解消するタイミングの運転操作への依存性が特定される構成としてもよい。
【0068】
さらに、上述の実施形態においては、回生ブレーキのみを発生させて車両を減速させる例を説明したが、むろん、回生ブレーキ以外のブレーキを発生させて車両を減速させる構成であってもよいし、各種のブレーキを組み合わせて車両を減速させる構成であってもよい。すなわち、各種のブレーキによって車両を制動させる場合、制動期間が短いほど車両に作用させる制動力が大きくなり単位期間あたりの車速の変化が大きくなる。また、一般に、制動期間が短いほど単位期間あたりの消費エネルギーが大きくなるため、制動期間が短いほど燃費が悪くなる。そこで、停止要因が解消するタイミングが運転操作に依存する場合に、停止要因が解消するタイミングが運転操作に依存しない場合よりも短い制動距離で減速させる構成とする。この構成によれば、停止要因が解消するタイミングが運転操作に依存する場合に運転者が煩わしさを感じることを抑制することが可能であり、停止要因が解消するタイミングが運転操作に依存しない場合に相対的に良い燃費で車両を減速させた後に停止させることが可能である。
【0069】
さらに、車両の減速開始から停止までの期間を短くすべき状況は、後続車の状況以外にも各種の状況を想定可能である。例えば、運転者の意志や車両の周囲の車両などによって特定される状況を想定可能である。より具体的には、運転者がナビゲーション装置10を操作しようとしている場合など、運転者自身が早期に車両を停止させることを意図している場合に長い制動期間で車両を停止させると運転者に煩わしさを感じさせてしまうが、この場合に第2減速制御を実行対象減速制御として選択すれば、運転者に煩わしさを感じさせることはない。
【0070】
さらに、上述の実施形態においては、一旦第1減速制御が実行対象減速制御として選択された後に、第2減速制御を実行対象減速制御として選択し直す構成であったが、一旦第2減速制御が実行対象減速制御として選択された後に、第1減速制御を実行対象減速制御として選択し直す構成としてもよい。例えば、停止要因が解消するタイミングが運転操作に依存すると判定されたことにより、一旦、第2減速制御が実行対象減速制御として選択された場合であっても、車両の減速開始から停止までの期間を短くすべき状況でない場合に第1減速制御を実行対象減速制御として選択し直す構成としてもよい。車両の減速開始から停止までの期間を短くすべき状況でない場合としては、例えば、運転者が目的地に向けて走行している過程において予想される予想到達時刻と運転者が意図している目的地への目標到着時刻との差分が所定期間以上である場合や、運転者ができるだけ良い燃費で走行することを望んでいる場合(例えば、ナビゲーション装置10が備えるインタフェースによって運転者が省エネルギー走行を行うように指示した場合)等が挙げられる。
【0071】
さらに、上述の実施形態における運転操作依存性情報30bでは、停止要因と当該停止要因の運転操作への依存性とが対応づけられていたが、運転操作への依存性と減速制御とは直接的に対応するため、停止要因と減速制御とを直接的に対応させるように運転操作依存性情報30bを定義してもよい。
【0072】
さらに、車両の前方に車両を徐行させるべき徐行要因が存在する場合に実行対象減速制御を選択する構成を採用しても良い。すなわち、車両の前方の状況に基づいて車両を徐行させるべき徐行要因を特定し、当該徐行区間の通過を完了するタイミングが車両の運転者の運転操作に依存しない場合に第1減速制御を実行対象減速制御として選択し、徐行区間の通過を完了するタイミングが車両の運転者の運転操作に依存する場合に第2減速制御を実行対象減速制御として選択する構成を採用可能である。この構成によれば、車両が早期に徐行区間を通過可能であるにもかかわらず、長期間を費やして徐行区間まで走行する状況が発生することを防止することができる。なお、徐行区間は、車速の上限値を予め決められた徐行速度以下にすべき区間として予め決められた区間である。例えば、車両の前方の信号機において徐行指示信号(例えば、黄色の点滅信号)が表示されている場合において、当該信号機から車両の進行方向後方へ所定距離内の区間を徐行区間とすることが可能である。また、車両の前方にETC(Electronic Toll Collection system)の料金所が存在する場合に、当該料金所を含む区間を徐行区間とすることが可能である。なお、以上のような徐行区間の例は、徐行区間の通過を完了するタイミングが車両の運転者の運転操作に依存する場合の例である。
【符号の説明】
【0073】
10…ナビゲーション装置、20…制御部、21…減速制御プログラム、21a…停止要因特定部、21b…減速制御選択部、21c…減速制御部、30…記録媒体、30a…地図情報、30b…運転操作依存性情報、41…GPS受信部、42…車速センサ、43…ジャイロセンサ、44…カメラ、45…発電機、46…バッテリ
【特許請求の範囲】
【請求項1】
車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定する停止要因特定手段と、
前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択する減速制御選択手段と、
前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる減速制御手段と、
を備える減速制御装置。
【請求項2】
前記車両はバッテリに対して電力を充電する回生ブレーキを発生させて減速を行う回生制動部を備え、
前記第1減速制御は前記バッテリの性能を低下させることなく連続して充電可能な連続充電電力を充電する回生ブレーキを発生させて減速を行う減速制御であり、
前記第2減速制御は前記連続充電電力よりも大きい電力を充電する回生ブレーキを発生させて減速を行う減速制御である、
請求項1に記載の減速制御装置。
【請求項3】
前記減速制御選択手段は、
前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合であっても、前記車両の減速開始から停止までの期間を短くすべき状況である場合には、前記第2減速制御を前記実行対象減速制御として選択する、
請求項1または請求項2のいずれかに記載の減速制御装置。
【請求項4】
前記減速制御選択手段は、
前記車両の後方の状況に基づいて後続車と前記車両との距離を特定し、当該距離が所定距離以下である場合に前記車両の減速開始から停止までの期間を短くすべき状況であると判定する、
請求項3に記載の減速制御装置。
【請求項5】
車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定する停止要因特定工程と、
前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択する減速制御選択工程と、
前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる減速制御工程と、
を含む減速制御方法。
【請求項6】
車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定する停止要因特定機能と、
前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択する減速制御選択機能と、
前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる減速制御機能と、
をコンピュータに実現させる減速制御プログラム。
【請求項1】
車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定する停止要因特定手段と、
前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択する減速制御選択手段と、
前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる減速制御手段と、
を備える減速制御装置。
【請求項2】
前記車両はバッテリに対して電力を充電する回生ブレーキを発生させて減速を行う回生制動部を備え、
前記第1減速制御は前記バッテリの性能を低下させることなく連続して充電可能な連続充電電力を充電する回生ブレーキを発生させて減速を行う減速制御であり、
前記第2減速制御は前記連続充電電力よりも大きい電力を充電する回生ブレーキを発生させて減速を行う減速制御である、
請求項1に記載の減速制御装置。
【請求項3】
前記減速制御選択手段は、
前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合であっても、前記車両の減速開始から停止までの期間を短くすべき状況である場合には、前記第2減速制御を前記実行対象減速制御として選択する、
請求項1または請求項2のいずれかに記載の減速制御装置。
【請求項4】
前記減速制御選択手段は、
前記車両の後方の状況に基づいて後続車と前記車両との距離を特定し、当該距離が所定距離以下である場合に前記車両の減速開始から停止までの期間を短くすべき状況であると判定する、
請求項3に記載の減速制御装置。
【請求項5】
車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定する停止要因特定工程と、
前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択する減速制御選択工程と、
前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる減速制御工程と、
を含む減速制御方法。
【請求項6】
車両の前方の状況に基づいて前記車両を停止させるべき停止要因を特定する停止要因特定機能と、
前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存しない場合には、所定の制動期間で前記車両を停止させる第1減速制御を実行対象減速制御として選択し、前記停止要因が解消するタイミングが前記車両の運転者の運転操作に依存する場合には、前記第1減速制御よりも制動期間が短い第2減速制御を実行対象減速制御として選択する減速制御選択機能と、
前記実行対象減速制御を実行して前記停止要因に応じた停止位置にて前記車両を停止させる減速制御機能と、
をコンピュータに実現させる減速制御プログラム。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−147294(P2011−147294A)
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願番号】特願2010−7265(P2010−7265)
【出願日】平成22年1月15日(2010.1.15)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願日】平成22年1月15日(2010.1.15)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]