
減速補助装置を備えるエレベータ
【課題】本発明は、昇降路のピットの深さが緩衝装置のストロークによらないエレベータを提供する。
【解決手段】一実施形態のエレベータ1は、乗籠3と釣合錘4とがメインロープ5によって昇降路2内につるべ式に吊下げられたエレベータであって、第1の永久磁石41と、第1の電磁石42と、第2の電磁石43とを備える。第1の永久磁石41は、釣合錘4に搭載される。第1の電磁石42は、乗籠3の減速を開始する必要がある限界位置Cから昇降路2の床2Aまでの距離に少なくとも相当する距離にわたって昇降路2の上部に配置され、第1の永久磁石41を下方へ引き下げる方向に磁力を発生する。第2の電磁石43は、昇降路2の上端に設置され、第1の永久磁石41と反発する磁力を発生する。
【解決手段】一実施形態のエレベータ1は、乗籠3と釣合錘4とがメインロープ5によって昇降路2内につるべ式に吊下げられたエレベータであって、第1の永久磁石41と、第1の電磁石42と、第2の電磁石43とを備える。第1の永久磁石41は、釣合錘4に搭載される。第1の電磁石42は、乗籠3の減速を開始する必要がある限界位置Cから昇降路2の床2Aまでの距離に少なくとも相当する距離にわたって昇降路2の上部に配置され、第1の永久磁石41を下方へ引き下げる方向に磁力を発生する。第2の電磁石43は、昇降路2の上端に設置され、第1の永久磁石41と反発する磁力を発生する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、定格速度を超えて降下した乗籠がピット床に到達する前に安全に減速停止させる緩衝装置を備えるエレベータに関する。
【背景技術】
【0002】
エレベータは、乗籠が定格速度を超えて降下した場合、乗籠が昇降路の下のピット床に衝突しないように乗籠を受け止める緩衝装置を装備している。緩衝装置は、乗籠内の乗客に対して安全に減速停止させなければならない。そして、乗籠を減速させるときの減速度の上限が定められている。その結果、乗籠の移動速度が速いと、それに応じて緩衝装置が乗籠を減速ために必要なストロークも長くなる。したがって、高層ビルに設置される高速エレベータの緩衝装置は、長さが十数メートルを超えるものもある。
【0003】
緩衝装置は、バネ式およびオイル式やこれらを組み合わせた形式のものが一般に知られている他、磁石と超伝導体との反発力によって受け止める磁気式のものも知られている。これらの緩衝装置は、乗籠の下部とピット床との間に設置され、乗籠を安全に停止させることを目的としている。
【0004】
また、乗籠または釣合錘が昇降路の下部で緩衝装置によって急激に減速停止された場合に、メインロープの反対側に取り付けられている釣合錘または乗籠が勢い余って昇降路の天井に衝突しないように、乗籠および釣合錘と昇降路の天井との間に緩衝装置を装備したエレベータがある。このエレベータは、乗籠または釣合錘が飛び上がることを想定しており、乗籠や釣合錘を受け止めるために昇降路上部に必要となる空間を小さくすることを目的としている。そして、このエレベータは、乗籠が昇降路の下部で急減速されたときに釣合錘が昇降路の上部で飛び上がるのを防止するとともに、釣合錘が昇降路の下部で急減速されたときに乗籠が昇降路の上部で飛び上がるのを防止する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−64862号公報
【特許文献2】実開平2−132083号公報
【特許文献3】特開昭61−169475号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、乗籠を安全に減速停止させるときの最大減速度が規定されているため、いずれのエレベータの緩衝装置も乗籠をピット床に衝突させないために必要となるストロークは変わらない。緩衝装置は、通常運転時において、乗籠が接触しないようにピットに配置される。したがって、緩衝装置を設置するピットの深さは、緩衝装置のストロークに応じた深さが必要である。
【0007】
そこで、本発明は、昇降路のピットの深さが緩衝装置のストロークによらないエレベータを提供する。
【課題を解決するための手段】
【0008】
一実施形態のエレベータは、昇降路の上部に設置された巻上機にメインロープが巻き掛けられ、乗籠と釣合錘とがメインロープによって昇降路内につるべ式に吊下げられたエレベータであって、第1の永久磁石と、第1の電磁石と、第2の電磁石とを備える。第1の永久磁石は、釣合錘に搭載される。第1の電磁石は、昇降路の床に達する直前で乗籠を安全に停止させるために乗籠の減速を開始する必要がある限界位置から昇降路の床までの距離に少なくとも相当する距離にわたって昇降路の上部に配置され、第1の永久磁石を下方へ引き下げる方向に磁力を発生する。第2の電磁石は、昇降路の上端に設置され、第1の永久磁石と反発する磁力を発生する。
【図面の簡単な説明】
【0009】
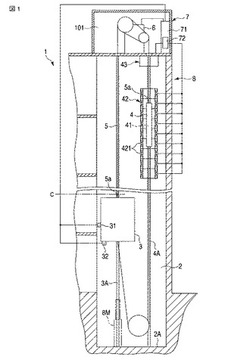
【図1】第1の実施形態のエレベータを模式的に示す断面図。
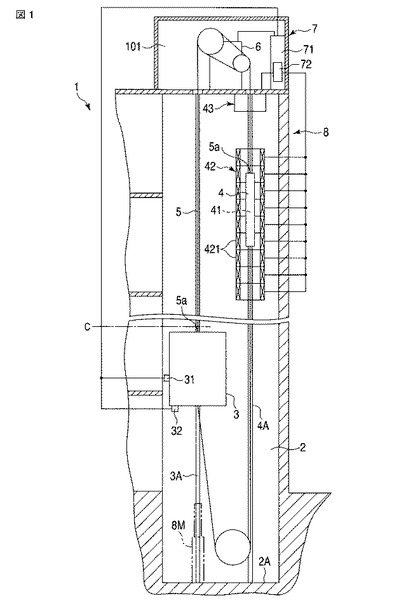
【図2】第2の実施形態のエレベータを模式的に示す断面図。
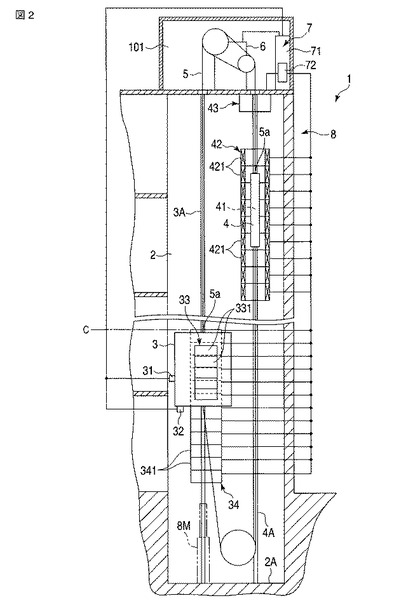
【図3】図2に示したエレベータの乗籠が昇降路の下部にある場合の断面図。
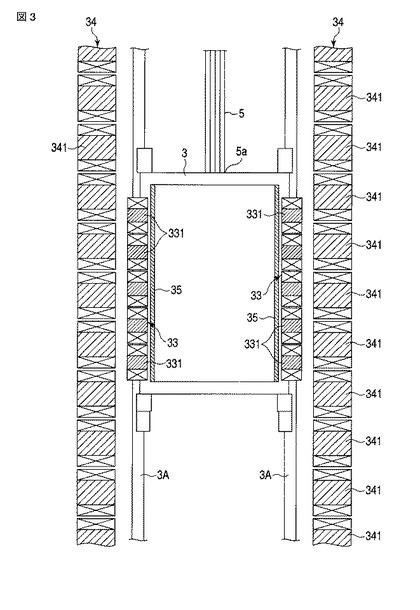
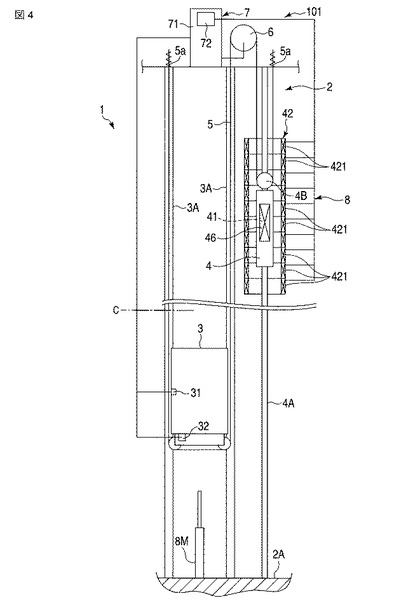
【図4】第3の実施形態のエレベータを模式的に示す断面図。
【発明を実施するための形態】
【0010】
第1の実施形態のエレベータ1について、図1を参照して説明する。図1に示すエレベータ1は、昇降路2内につるべ式に乗籠3と釣合錘4とがメインロープ5によって吊り下げられたエレベータ1である。巻上機6は、昇降路2の上部に設置されている。このエレベータ1の場合、最上階よりも上に機械室101が設置されており、巻上機6はその機械室101に据えられる。メインロープ5は、この巻上機6に巻き掛けられて、その端部5aは、乗籠3と釣合錘4にそれぞれ直接連結されている。巻上機6が駆動され、乗籠3が上昇すると釣合錘4が下降し、乗籠3が下降すると釣合錘4が上昇する。このエレベータ1は、いわゆる「1:1形」にローピングされている。
【0011】
図1に示すように、エレベータ1は、第1の永久磁石41と、第1の電磁石42と、第2の電磁石43と、速度センサ31と、位置検出センサ32と、緩衝制御装置71とを備える。第1の永久磁石41は、釣合錘4に搭載される。第1の永久磁石41は、釣合錘4の上と下に磁極が作られる向きに配置される。
【0012】
第1の電磁石42は、昇降路2の上部において鉛直方向に一定の距離にわたって設置されている。この場合の一定の距離とは、乗籠3が最大降下速度を超えて移動していても昇降路2の床2Aに到達する直前に乗籠3を安全に停止させるために、乗籠3の減速を開始する必要がある限界位置Cから床2Aまでの距離に少なくとも相当する距離である。第1の電磁石42は、設置された区間において、釣合錘4に搭載された第1の永久磁石41を下方へ引き下げる方向に磁力を発生する。
【0013】
この第1の電磁石42は、複数のコイルセグメント421によって構成され、釣合錘4が移動する軌跡の周囲に配置される。第1の実施形態の場合、釣合錘4は、錘用ガイドレール4Aによって案内されている。各コイルセグメント421は、この錘用ガイドレール4Aも含めてこれを取り巻く外周に捲回されるコイルで構成される。各コイルセグメント421は、釣合錘4の位置に応じて発生する磁場の向きを切り替えられ、第1の永久磁石41を下方へ引き下げる方向へ作用する。
【0014】
第2の電磁石43は、昇降路2の上端に釣合錘4の軌跡を横切って配置される。この第2の電磁石43は、電力が供給されると第1の永久磁石41と反発する磁力を発生する。第2の電磁石43は、乗籠3が昇降路2の床2Aに達する直前の位置に在るときに、釣合錘4に搭載された第1の永久磁石41に対して作用する。
【0015】
速度センサ31は、乗籠3の移動速度を検出する。乗籠3の速度は、巻上機6の回転数やガバナーによっても検出することができる。しかし、これらの装置は、エレベータ1が正常に運行されているときに機能するものである。したがって、乗籠3が巻上機6のブレーキやガバナーに連動している非常停止装置によっても停止できない場合には、巻上機6やガバナーの速度検出機能は有効であるかわからない。したがって、第1の実施形態では、速度センサ31は、巻上機6やガバナーとは別系統で設けられ、乗籠3の外部に設置され、昇降路2の内壁や籠用ガイドレール3Aに対して非接触に乗籠3の移動速度を検出する。非接触の速度センサ31として、超音波ドップラー式のセンサを採用する。あるいは、進行方向に2つの光量検知センサを設置し、2つのセンサから得られる信号の波形の相関関係から、乗籠3の移動速度を算出してもよい。
【0016】
位置検出センサ32は、昇降路2の床2Aから乗籠3までの距離を測定する。直接的に乗籠3から昇降路2の床2Aまでの距離を測定する場合は、位置検出センサ32は、乗籠3の下部に取り付けるか、または、昇降路2の床2Aに設置される。直接的に距離を計測するセンサとして、三角測量法やタイムオブフライト法を利用したものが採用される。位置検出センサ32によって計測すべき距離は、乗籠3の移動速度に応じた限界位置Cであるから、籠用ガイドレール3Aや昇降路2の内壁にあらかじめ配置されたマーカーを検出することで乗籠3の絶対位置を判定する位置検出センサ32であってもよい。この場合は、位置検出センサ32は、乗籠3の下部に限らず側部や上部に設置されていても良い。
【0017】
緩衝制御装置71は、機械室101に配置される制御盤7の一部に設けられていてもよいし、独立して設置されても良い。この緩衝制御装置71は、第1の電磁石42、第2の電磁石43の各コイルセグメント421、速度センサ31、位置検出センサ32にそれぞれ接続されている。緩衝制御装置71は、速度センサ31によって検出された乗籠3の移動速度が乗籠3に設定される最大速度を超えている状態で、位置検出センサ32によって限界位置Cを検出すると、第1の電磁石42を作動させる。
【0018】
第1の実施形態のエレベータ1は、さらに停電時にも第1の電磁石42および第2の電磁石43に電力を供給するための二次電池72を備える。第1の電磁石42および第2の電磁石43は、昇降路2の最上部に配置されている。つまり、乗籠3が最下階に着床するために接近するまたは他の階に移動するために離床する度に、釣合錘4に搭載された第1の永久磁石41が第1の電磁石42および第2の電磁石43に接近または離間する。そこで、第1の電磁石42が作動していない状況、つまり通常運転中において、第1の電磁石42および第2の電磁石43に対して第1の永久磁石41が接近または離間するときの誘導起電力によって、二次電池72を蓄電する。二次電池72が十分に充電されている場合、発生する電力は、エレベータ1で利用するか、建物に供給してもよい。
【0019】
図1に示すように乗籠3が限界位置Cを越えた場合、釣合錘4は、第1の電磁石42が設置された区間に入っており、第1の永久磁石41は、第1の電磁石42の磁力の影響を受ける位置に在る。乗籠3が限界位置Cに差し掛かったときに最大速度を超えて降下していれば、緩衝制御装置71が作動して第1の電磁石42に通電される。その結果、第1の永久磁石41が下方へ引き下げられる方向に力を受け、釣合錘が減速する。つまり、メインロープ5によって連結されている乗籠3も減速される。そして、釣合錘4が昇降路2の最上部に達すると、第2の電磁石43が緩衝制御装置71によって作動される。第1の永久磁石41は、第1の電磁石42によって下方へ引き下げる磁力を受けるとともに、第2の電磁石43によって下方へ押し戻される磁力を受ける。釣合錘4は、昇降路2の上部に保持され、メインロープ5で連結された乗籠3は、昇降路の下部で停止する。
【0020】
なお、この明細書において、「限界位置」とは、移動中の乗籠3の移動速度および昇降路2内における位置に応じて適宜変化するものであってもよい。この場合、緩衝制御装置71は、巻上機6やガバナーの動作の異常を制御盤7を介して検知した場合に、速度センサ31および位置検出センサ32の信号から限界位置Cを設定し、この限界位置Cに乗籠3が接近した場合に第1の電磁石42および第2の電磁石43をそれぞれ作動させるように制御する。また、乗籠3に設定される限界位置Cに対応する釣合錘4の位置が第1の電磁石42の設置範囲内になる場合、乗籠3の減速率が小さくなるように、乗籠3が限界位置Cに達する前の段階から第1の電磁石42を作動させてもよい。
【0021】
以上のように構成されたエレベータ1は、乗籠3が最大速度を超えて降下するようなことがあった場合に、この乗籠3につるべ式にメインロープ5で連結された釣合錘4を減速し停止させることによって、乗籠3を安全に減速及び停止させる。このエレベータ1の場合、磁力で釣合錘4を制動させるため、乗籠3の下にストロークの長い緩衝装置を必要としない。つまり、釣合錘4に搭載された第1の永久磁石41と、釣合錘4の軌跡の周囲に配置される第1の電磁石42と、昇降路2の上端に配置される第2の電磁石43は、乗籠3を非常停止させる必要が生じた場合に緩衝装置8として機能する。
【0022】
釣合錘4は、通常運転状態において第1の電磁石42及び第2の電磁石43の磁力を受けず、乗籠3を非常停止させる必要が生じたときにのみ緩衝制御装置71によって作動された第1の電磁石42及び第2の電磁石43の磁力を受け、通常の移動範囲内において減速及び停止される。そして、乗籠3もまた通常の移動範囲内において、減速および停止される。つまり、第1の永久磁石41と第1の電磁石42および第2の電磁石43とは、緩衝装置として機能し、緩衝装置8としてのストロークは、乗籠3及び釣合錘4が通常運転において移動する範囲にオーバーラップしている。その結果、乗籠3の最大移動速度に応じたストロークの長い機械式の緩衝装置を昇降路のピットに設置しなくても良い。
【0023】
さらに、釣合錘4を停止することによって乗籠3が停止する位置を最下階の着床位置に設定すれば、第1の永久磁石41と第1の電磁石42と第2の電磁石43によって構成される緩衝装置8が作動した場合、直ちに乗客を脱出させることができる。
【0024】
第1の電磁石42の各コイルセグメント421は、昇降路2の上端に近いほど、強い磁力を発生するように構成してもよい。このようにすることで、釣合錘4ひいては乗籠3を減速させる力を徐々に強めることに適している。また、釣合錘4が第1の電磁石42に挿入されるにしたがって、第1の永久磁石が受ける力が増大し、移動速度も低下する。したがって、昇降路2の上端に近くなるほど磁力を弱くしてもよい。
【0025】
また、乗籠3が釣合錘4とすれ違うときに乗籠3の乗客に第1の永久磁石41の磁場の影響が無いように、釣合錘4の軌道に面した乗籠3の側壁に磁気遮蔽材を設置してもよい。さらに、釣合錘4を保持したい位置に第2の永久磁石を設置しても良い。第1の電磁石42及び第2の電磁石43に対して供給される電力が低下しても、第2の永久磁石で第1の永久磁石41を保持する。第2の永久磁石が通常運転中において第1の永久磁石41と引き合わないように、第2の永久磁石の外側に第2の永久磁石の磁場を打ち消すための消磁コイルを設置する。
【0026】
昇降路2の床2Aには、乗籠3が限界位置C近傍から自由落下すること、または、第1の電磁石42が設置されている範囲内に釣合錘4がある状態で乗籠3が自由落下することを想定した場合にも、乗籠3を安全に受け止めるための機械式の緩衝装置8Mを設置する。このときの乗籠3の移動速度は、最大速度よりも十分に小さい。したがって、緩衝装置8Mは、最大速度の乗籠3を受け止める場合よりもストロークの短いもので十分である。つまり、緩衝装置8Mのために必要となる昇降路2のピットは浅くなる。現状の建物のピットを掘り下げることなく、乗籠3の移動速度を速くする、または乗籠3の移動速度が速いエレベータ1にリニューアルすることも可能である。
【0027】
またこのエレベータ1によれば、釣合錘4を磁力で制動することによって、釣合錘4にメインロープ5で連結された乗籠3を減速および停止させる。したがって、高速エレベータとして乗籠3に空力特性を考慮してカウルやフードが取り付けられている場合でも、これらを損傷させない。
【0028】
第2の実施形態のエレベータ1について、図2および図3を参照して説明する。図2に示すエレベータ1は、第1の実施形態のエレベータ1が備える第1の永久磁石41、第1の電磁石42、第2の電磁石43、速度センサ31、位置検出センサ32、緩衝制御装置71などの設備に加えて、さらに、第3の電磁石33および第4の電磁石34を備える。各図中において第1の実施形態と同じ機能を有する構成には同一の符号を付し、詳細な説明は、第1の実施形態における対応する記載を参酌する。
【0029】
第3の電磁石33は、図2および図3に示すように、籠用ガイドレール3Aに面した乗籠3の側壁に配置される。第3の電磁石33は、乗籠3の移動方向に並ぶ複数のユニット331によって構成されている。各ユニット331に必要な電力は、乗籠3に接続されるテールコードを介して供給される。第3の電磁石33は、ユニット331ごとに電流および電圧を制御することによって所望する磁場を発生させる。
【0030】
第4の電磁石34は、図3に示すように第3の電磁石に対峙するように、乗籠3の軌道に対して籠用ガイドレール3Aの外側で、乗籠3に設定される最大降下速度以上の速度に対して設定される図2に示す限界位置Cから昇降路2の下端までの範囲に少なくとも設置される。したがって限界位置Cよりも上から第4の電磁石34を設置してもよい。この第4の電磁石34は、乗籠3の移動方向に並ぶ複数のユニット341によって構成されている。
【0031】
各ユニット341は、第1の電磁石42のコイルセグメント421や第3の電磁石33のユニット331と同様に個別に制御され所望する磁場を発生する。第2の実施形態の場合、第3の電磁石33が形成する磁場に対して作用することで、第3の電磁石33を上方へ引き上げる方向に磁力を発生させるように、第4の電磁石34は制御される。
【0032】
また、このエレベータ1において、第3の電磁石33および第4の電磁石34が発生する磁場が乗籠3に入らないように、乗籠3は、図3に示すように側壁の外側で第3の電磁石33との間に磁気遮蔽材35を有している。乗籠3は、天井や床にも磁気遮蔽材を配置してもよい。
【0033】
このように構成されたエレベータ1において、最大速度を超えて乗籠3が降下し、かつ巻上機6のブレーキや、ガバナーに連動する非常停止装置によっても乗籠3を停止できない場合、速度センサ31および位置検出センサ32の出力信号を基に、緩衝制御装置71は、第1の電磁石42を作動させて釣合錘4を減速させるとともに、第3の電磁石33および第4の電磁石34を作動させて乗籠3も減速させる。
【0034】
このように、第2の実施形態のエレベータ1は、釣合錘4側だけでなく乗籠3側にも電磁石を配置して乗籠3を減速させる。したがって、第1の永久磁石41、第1の電磁石42、第2の電磁石43、第3の電磁石33、第4の電磁石34として、磁力の小さいものを採用することができ、装置が嵩張らない。
【0035】
第1の電磁石42、第2の電磁石43、第3の電磁石33、第4の電磁石34は、停電などによって外部から電力を得られない場合にも作動するように、二次電池72に接続される。第1の実施形態と同様にエレベータ1が通常運転している間、二次電池72は、乗籠3が最下階に接近して釣合錘4が第1の電磁石42および第2の電磁石に接近する場合、および乗籠3が最下階から他の階へ移動して釣合錘4が第1の電磁石42および第2の電磁石43から離間する場合、それぞれにおいて第1の永久磁石41と第1の電磁石42および第2の電磁石43との間に発生する誘導起電力によって蓄電される。二次電池72の容量を超えて発生される電力は、エレベータ1の他の部分で消費する。また、第1の電磁石42および第2の電磁石43で発生する電力を第3の電磁石33および第4の電磁石34に供給して、最下階における乗籠3の制動に利用してもよい。
【0036】
第3の電磁石33および第4の電磁石34は、乗籠3の移動方向に同じピッチで配列されていてもよいし、異なるピッチで配列されていてもよい。第3の電磁石33と第4の電磁石34は、乗籠3の位置に応じて乗籠3を上方へ引き上げる方向へ最大の力を発揮するように、緩衝制御装置71によって各ユニット331,341の電流の向きをスイッチングされる。
【0037】
なお、乗籠3に搭載される第3の電磁石33の代わりに第3の永久磁石を搭載してもよい。その場合、第3の永久磁石の磁場を打ち消すための消磁コイルを設置する。消磁コイルに必要な電力は、乗籠3に接続されるテールコードを介して供給し、第3の永久磁石と第4の電磁石34によって乗籠3を減速させる場合に、消磁コイルに通じる電力を遮断する。
【0038】
第3の実施形態のエレベータ1について図4を参照して説明する。図4に示すエレベータにおいて、メインロープ5は、乗籠3の下部をくぐるように巻き掛けられるとともに、釣合錘4の上部に取り付けられたプーリ4Bにも巻き掛けられた、いわゆる「2:1形」にローピングされている。したがって、メインロープ5の端部5aは、籠用ガイドレール3Aの上端および錘用ガイドレール4Aの上端に用意されるロープヒッチに固定される。第1の実施形態のエレベータ1と同じ機能を有する構成は、図4中において同一の符号を付し、その詳細な説明は、第1の実施形態の記載を参酌する。
【0039】
第3の実施形態のエレベータ1は、釣合錘4に搭載された第1の永久磁石41の磁力を相殺する磁場を発生させるために、釣合錘4に消磁コイル46を搭載している。この場合、消磁コイル46は、錘用ガイドレール4Aを介して電力が供給される。なお、釣合錘4に対して電力供給用のケーブルを乗籠3のテールコードと同様に接続するか、乗籠3の下部から釣合錘4の下部に接続されるコンペンセイティングロープに電力供給用のケーブルを加えて電力を供給してもよい。また、釣合錘4に二次電池を搭載して電力をまかなう場合は、エレベータ1が休止している間、あるいは、電力が低下した段階で、昇降路内に設置される給電ポイントに釣合錘4を移動させて二次電池を充電する。
【0040】
エレベータ1が通常運転中である場合は、この消磁コイル46に通電して第1の永久磁石41の磁力を弱めるまたは封じ込める。乗籠3を昇降路2の下部で停止させる必要がある場合、消磁コイル46の電力を遮断して第1の永久磁石41の磁力を発揮させる。
【0041】
また、第1の永久磁石41および消磁コイル46を搭載する代わりに、第1の永久磁石の基になる強磁性体と、これを磁化させるための着磁コイルおよび瞬発的に大きな電力を発生させるためのバッテリとを釣合錘に搭載してもよい。着磁される前の強磁性体は磁力を発揮しないので、昇降路中に浮遊する磁性粉や微物を引き付けることもない。そして、乗籠3を停止させる必要が生じた場合に、緩衝制御装置71から無線で釣合錘4に通信してバッテリの電力を放出させ着磁コイルに電流を流すことによって、強磁性体を磁化させ、永久磁石にする。第1の実施形態の場合と同様に、釣合錘4を第1の電磁石42によって減速および停止させることで、乗籠3も安全に停止させる。
【0042】
このように、第3の実施形態の第1の永久磁石41(または、強磁性体)と第1の電磁石42とは、第1の実施形態および第2の実施形態と同様に緩衝装置8として機能する。限界位置Cよりも低い位置で乗籠3を非常停止させる必要が生じた場合に備えて、機械式の緩衝装置8Mを昇降路2の床2Aに設置しても良い。この場合、乗籠3を機械式の緩衝装置のみで受け止める場合に比べて、作動ストロークの短い機械式の緩衝装置8Mを備えるだけでよい。その結果、このエレベータ1は、昇降路2のピットを浅くすることができる。
【0043】
なお、上述の各実施形態において電磁石であったものを永久磁石の基となる強磁性体およびこの強磁性体を磁化させるための着磁コイルで構成してもよい。強磁性体は、磁化していない状態において磁力が生じていない。したがって、初期設置されるときは、周囲に磁場の影響を及ぼさない。そして、緩衝装置として乗籠3を停止させる必要が生じた場合、各強磁性体に対応して配置されている着磁コイルに電流を流し、強磁性体を磁化させる。これによって発生した磁力で、乗籠3および釣合錘4を減速および停止させる。
【0044】
強磁性体を磁化させるための電力は、瞬間的なものでよいので、停電などによって電力が十分に得られない場合でも、小さな二次電池ですべての強磁性体を磁化させることも容易である。一度磁化された強磁性体は、その後、エレベータ1を通常運転するのに弊害の無いように、着磁コイルに電流を流すことで磁力を打ち消すか、着磁コイルを利用して磁化した強磁性体を脱磁するか、または、エレベータ1を復旧させる際に着磁されていない強磁性体と交換する。
【0045】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することを意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0046】
1…エレベータ、2…昇降路、2A…床、3…乗籠、4…釣合錘、5…メインロープ、6…巻上機、31…速度センサ、32…位置検出センサ、33…第3の電磁石、34…第4の電磁石、35…磁気遮蔽材、41…第1の永久磁石、42…第1の電磁石、421…コイルセグメント、43…第2の電磁石、46…消磁コイル、71…緩衝制御装置、72…二次電池、C…限界位置、8…緩衝装置(第1の永久磁石41と第1の電磁石42と第2の電磁石43)。
【技術分野】
【0001】
本発明の実施形態は、定格速度を超えて降下した乗籠がピット床に到達する前に安全に減速停止させる緩衝装置を備えるエレベータに関する。
【背景技術】
【0002】
エレベータは、乗籠が定格速度を超えて降下した場合、乗籠が昇降路の下のピット床に衝突しないように乗籠を受け止める緩衝装置を装備している。緩衝装置は、乗籠内の乗客に対して安全に減速停止させなければならない。そして、乗籠を減速させるときの減速度の上限が定められている。その結果、乗籠の移動速度が速いと、それに応じて緩衝装置が乗籠を減速ために必要なストロークも長くなる。したがって、高層ビルに設置される高速エレベータの緩衝装置は、長さが十数メートルを超えるものもある。
【0003】
緩衝装置は、バネ式およびオイル式やこれらを組み合わせた形式のものが一般に知られている他、磁石と超伝導体との反発力によって受け止める磁気式のものも知られている。これらの緩衝装置は、乗籠の下部とピット床との間に設置され、乗籠を安全に停止させることを目的としている。
【0004】
また、乗籠または釣合錘が昇降路の下部で緩衝装置によって急激に減速停止された場合に、メインロープの反対側に取り付けられている釣合錘または乗籠が勢い余って昇降路の天井に衝突しないように、乗籠および釣合錘と昇降路の天井との間に緩衝装置を装備したエレベータがある。このエレベータは、乗籠または釣合錘が飛び上がることを想定しており、乗籠や釣合錘を受け止めるために昇降路上部に必要となる空間を小さくすることを目的としている。そして、このエレベータは、乗籠が昇降路の下部で急減速されたときに釣合錘が昇降路の上部で飛び上がるのを防止するとともに、釣合錘が昇降路の下部で急減速されたときに乗籠が昇降路の上部で飛び上がるのを防止する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−64862号公報
【特許文献2】実開平2−132083号公報
【特許文献3】特開昭61−169475号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、乗籠を安全に減速停止させるときの最大減速度が規定されているため、いずれのエレベータの緩衝装置も乗籠をピット床に衝突させないために必要となるストロークは変わらない。緩衝装置は、通常運転時において、乗籠が接触しないようにピットに配置される。したがって、緩衝装置を設置するピットの深さは、緩衝装置のストロークに応じた深さが必要である。
【0007】
そこで、本発明は、昇降路のピットの深さが緩衝装置のストロークによらないエレベータを提供する。
【課題を解決するための手段】
【0008】
一実施形態のエレベータは、昇降路の上部に設置された巻上機にメインロープが巻き掛けられ、乗籠と釣合錘とがメインロープによって昇降路内につるべ式に吊下げられたエレベータであって、第1の永久磁石と、第1の電磁石と、第2の電磁石とを備える。第1の永久磁石は、釣合錘に搭載される。第1の電磁石は、昇降路の床に達する直前で乗籠を安全に停止させるために乗籠の減速を開始する必要がある限界位置から昇降路の床までの距離に少なくとも相当する距離にわたって昇降路の上部に配置され、第1の永久磁石を下方へ引き下げる方向に磁力を発生する。第2の電磁石は、昇降路の上端に設置され、第1の永久磁石と反発する磁力を発生する。
【図面の簡単な説明】
【0009】
【図1】第1の実施形態のエレベータを模式的に示す断面図。
【図2】第2の実施形態のエレベータを模式的に示す断面図。
【図3】図2に示したエレベータの乗籠が昇降路の下部にある場合の断面図。
【図4】第3の実施形態のエレベータを模式的に示す断面図。
【発明を実施するための形態】
【0010】
第1の実施形態のエレベータ1について、図1を参照して説明する。図1に示すエレベータ1は、昇降路2内につるべ式に乗籠3と釣合錘4とがメインロープ5によって吊り下げられたエレベータ1である。巻上機6は、昇降路2の上部に設置されている。このエレベータ1の場合、最上階よりも上に機械室101が設置されており、巻上機6はその機械室101に据えられる。メインロープ5は、この巻上機6に巻き掛けられて、その端部5aは、乗籠3と釣合錘4にそれぞれ直接連結されている。巻上機6が駆動され、乗籠3が上昇すると釣合錘4が下降し、乗籠3が下降すると釣合錘4が上昇する。このエレベータ1は、いわゆる「1:1形」にローピングされている。
【0011】
図1に示すように、エレベータ1は、第1の永久磁石41と、第1の電磁石42と、第2の電磁石43と、速度センサ31と、位置検出センサ32と、緩衝制御装置71とを備える。第1の永久磁石41は、釣合錘4に搭載される。第1の永久磁石41は、釣合錘4の上と下に磁極が作られる向きに配置される。
【0012】
第1の電磁石42は、昇降路2の上部において鉛直方向に一定の距離にわたって設置されている。この場合の一定の距離とは、乗籠3が最大降下速度を超えて移動していても昇降路2の床2Aに到達する直前に乗籠3を安全に停止させるために、乗籠3の減速を開始する必要がある限界位置Cから床2Aまでの距離に少なくとも相当する距離である。第1の電磁石42は、設置された区間において、釣合錘4に搭載された第1の永久磁石41を下方へ引き下げる方向に磁力を発生する。
【0013】
この第1の電磁石42は、複数のコイルセグメント421によって構成され、釣合錘4が移動する軌跡の周囲に配置される。第1の実施形態の場合、釣合錘4は、錘用ガイドレール4Aによって案内されている。各コイルセグメント421は、この錘用ガイドレール4Aも含めてこれを取り巻く外周に捲回されるコイルで構成される。各コイルセグメント421は、釣合錘4の位置に応じて発生する磁場の向きを切り替えられ、第1の永久磁石41を下方へ引き下げる方向へ作用する。
【0014】
第2の電磁石43は、昇降路2の上端に釣合錘4の軌跡を横切って配置される。この第2の電磁石43は、電力が供給されると第1の永久磁石41と反発する磁力を発生する。第2の電磁石43は、乗籠3が昇降路2の床2Aに達する直前の位置に在るときに、釣合錘4に搭載された第1の永久磁石41に対して作用する。
【0015】
速度センサ31は、乗籠3の移動速度を検出する。乗籠3の速度は、巻上機6の回転数やガバナーによっても検出することができる。しかし、これらの装置は、エレベータ1が正常に運行されているときに機能するものである。したがって、乗籠3が巻上機6のブレーキやガバナーに連動している非常停止装置によっても停止できない場合には、巻上機6やガバナーの速度検出機能は有効であるかわからない。したがって、第1の実施形態では、速度センサ31は、巻上機6やガバナーとは別系統で設けられ、乗籠3の外部に設置され、昇降路2の内壁や籠用ガイドレール3Aに対して非接触に乗籠3の移動速度を検出する。非接触の速度センサ31として、超音波ドップラー式のセンサを採用する。あるいは、進行方向に2つの光量検知センサを設置し、2つのセンサから得られる信号の波形の相関関係から、乗籠3の移動速度を算出してもよい。
【0016】
位置検出センサ32は、昇降路2の床2Aから乗籠3までの距離を測定する。直接的に乗籠3から昇降路2の床2Aまでの距離を測定する場合は、位置検出センサ32は、乗籠3の下部に取り付けるか、または、昇降路2の床2Aに設置される。直接的に距離を計測するセンサとして、三角測量法やタイムオブフライト法を利用したものが採用される。位置検出センサ32によって計測すべき距離は、乗籠3の移動速度に応じた限界位置Cであるから、籠用ガイドレール3Aや昇降路2の内壁にあらかじめ配置されたマーカーを検出することで乗籠3の絶対位置を判定する位置検出センサ32であってもよい。この場合は、位置検出センサ32は、乗籠3の下部に限らず側部や上部に設置されていても良い。
【0017】
緩衝制御装置71は、機械室101に配置される制御盤7の一部に設けられていてもよいし、独立して設置されても良い。この緩衝制御装置71は、第1の電磁石42、第2の電磁石43の各コイルセグメント421、速度センサ31、位置検出センサ32にそれぞれ接続されている。緩衝制御装置71は、速度センサ31によって検出された乗籠3の移動速度が乗籠3に設定される最大速度を超えている状態で、位置検出センサ32によって限界位置Cを検出すると、第1の電磁石42を作動させる。
【0018】
第1の実施形態のエレベータ1は、さらに停電時にも第1の電磁石42および第2の電磁石43に電力を供給するための二次電池72を備える。第1の電磁石42および第2の電磁石43は、昇降路2の最上部に配置されている。つまり、乗籠3が最下階に着床するために接近するまたは他の階に移動するために離床する度に、釣合錘4に搭載された第1の永久磁石41が第1の電磁石42および第2の電磁石43に接近または離間する。そこで、第1の電磁石42が作動していない状況、つまり通常運転中において、第1の電磁石42および第2の電磁石43に対して第1の永久磁石41が接近または離間するときの誘導起電力によって、二次電池72を蓄電する。二次電池72が十分に充電されている場合、発生する電力は、エレベータ1で利用するか、建物に供給してもよい。
【0019】
図1に示すように乗籠3が限界位置Cを越えた場合、釣合錘4は、第1の電磁石42が設置された区間に入っており、第1の永久磁石41は、第1の電磁石42の磁力の影響を受ける位置に在る。乗籠3が限界位置Cに差し掛かったときに最大速度を超えて降下していれば、緩衝制御装置71が作動して第1の電磁石42に通電される。その結果、第1の永久磁石41が下方へ引き下げられる方向に力を受け、釣合錘が減速する。つまり、メインロープ5によって連結されている乗籠3も減速される。そして、釣合錘4が昇降路2の最上部に達すると、第2の電磁石43が緩衝制御装置71によって作動される。第1の永久磁石41は、第1の電磁石42によって下方へ引き下げる磁力を受けるとともに、第2の電磁石43によって下方へ押し戻される磁力を受ける。釣合錘4は、昇降路2の上部に保持され、メインロープ5で連結された乗籠3は、昇降路の下部で停止する。
【0020】
なお、この明細書において、「限界位置」とは、移動中の乗籠3の移動速度および昇降路2内における位置に応じて適宜変化するものであってもよい。この場合、緩衝制御装置71は、巻上機6やガバナーの動作の異常を制御盤7を介して検知した場合に、速度センサ31および位置検出センサ32の信号から限界位置Cを設定し、この限界位置Cに乗籠3が接近した場合に第1の電磁石42および第2の電磁石43をそれぞれ作動させるように制御する。また、乗籠3に設定される限界位置Cに対応する釣合錘4の位置が第1の電磁石42の設置範囲内になる場合、乗籠3の減速率が小さくなるように、乗籠3が限界位置Cに達する前の段階から第1の電磁石42を作動させてもよい。
【0021】
以上のように構成されたエレベータ1は、乗籠3が最大速度を超えて降下するようなことがあった場合に、この乗籠3につるべ式にメインロープ5で連結された釣合錘4を減速し停止させることによって、乗籠3を安全に減速及び停止させる。このエレベータ1の場合、磁力で釣合錘4を制動させるため、乗籠3の下にストロークの長い緩衝装置を必要としない。つまり、釣合錘4に搭載された第1の永久磁石41と、釣合錘4の軌跡の周囲に配置される第1の電磁石42と、昇降路2の上端に配置される第2の電磁石43は、乗籠3を非常停止させる必要が生じた場合に緩衝装置8として機能する。
【0022】
釣合錘4は、通常運転状態において第1の電磁石42及び第2の電磁石43の磁力を受けず、乗籠3を非常停止させる必要が生じたときにのみ緩衝制御装置71によって作動された第1の電磁石42及び第2の電磁石43の磁力を受け、通常の移動範囲内において減速及び停止される。そして、乗籠3もまた通常の移動範囲内において、減速および停止される。つまり、第1の永久磁石41と第1の電磁石42および第2の電磁石43とは、緩衝装置として機能し、緩衝装置8としてのストロークは、乗籠3及び釣合錘4が通常運転において移動する範囲にオーバーラップしている。その結果、乗籠3の最大移動速度に応じたストロークの長い機械式の緩衝装置を昇降路のピットに設置しなくても良い。
【0023】
さらに、釣合錘4を停止することによって乗籠3が停止する位置を最下階の着床位置に設定すれば、第1の永久磁石41と第1の電磁石42と第2の電磁石43によって構成される緩衝装置8が作動した場合、直ちに乗客を脱出させることができる。
【0024】
第1の電磁石42の各コイルセグメント421は、昇降路2の上端に近いほど、強い磁力を発生するように構成してもよい。このようにすることで、釣合錘4ひいては乗籠3を減速させる力を徐々に強めることに適している。また、釣合錘4が第1の電磁石42に挿入されるにしたがって、第1の永久磁石が受ける力が増大し、移動速度も低下する。したがって、昇降路2の上端に近くなるほど磁力を弱くしてもよい。
【0025】
また、乗籠3が釣合錘4とすれ違うときに乗籠3の乗客に第1の永久磁石41の磁場の影響が無いように、釣合錘4の軌道に面した乗籠3の側壁に磁気遮蔽材を設置してもよい。さらに、釣合錘4を保持したい位置に第2の永久磁石を設置しても良い。第1の電磁石42及び第2の電磁石43に対して供給される電力が低下しても、第2の永久磁石で第1の永久磁石41を保持する。第2の永久磁石が通常運転中において第1の永久磁石41と引き合わないように、第2の永久磁石の外側に第2の永久磁石の磁場を打ち消すための消磁コイルを設置する。
【0026】
昇降路2の床2Aには、乗籠3が限界位置C近傍から自由落下すること、または、第1の電磁石42が設置されている範囲内に釣合錘4がある状態で乗籠3が自由落下することを想定した場合にも、乗籠3を安全に受け止めるための機械式の緩衝装置8Mを設置する。このときの乗籠3の移動速度は、最大速度よりも十分に小さい。したがって、緩衝装置8Mは、最大速度の乗籠3を受け止める場合よりもストロークの短いもので十分である。つまり、緩衝装置8Mのために必要となる昇降路2のピットは浅くなる。現状の建物のピットを掘り下げることなく、乗籠3の移動速度を速くする、または乗籠3の移動速度が速いエレベータ1にリニューアルすることも可能である。
【0027】
またこのエレベータ1によれば、釣合錘4を磁力で制動することによって、釣合錘4にメインロープ5で連結された乗籠3を減速および停止させる。したがって、高速エレベータとして乗籠3に空力特性を考慮してカウルやフードが取り付けられている場合でも、これらを損傷させない。
【0028】
第2の実施形態のエレベータ1について、図2および図3を参照して説明する。図2に示すエレベータ1は、第1の実施形態のエレベータ1が備える第1の永久磁石41、第1の電磁石42、第2の電磁石43、速度センサ31、位置検出センサ32、緩衝制御装置71などの設備に加えて、さらに、第3の電磁石33および第4の電磁石34を備える。各図中において第1の実施形態と同じ機能を有する構成には同一の符号を付し、詳細な説明は、第1の実施形態における対応する記載を参酌する。
【0029】
第3の電磁石33は、図2および図3に示すように、籠用ガイドレール3Aに面した乗籠3の側壁に配置される。第3の電磁石33は、乗籠3の移動方向に並ぶ複数のユニット331によって構成されている。各ユニット331に必要な電力は、乗籠3に接続されるテールコードを介して供給される。第3の電磁石33は、ユニット331ごとに電流および電圧を制御することによって所望する磁場を発生させる。
【0030】
第4の電磁石34は、図3に示すように第3の電磁石に対峙するように、乗籠3の軌道に対して籠用ガイドレール3Aの外側で、乗籠3に設定される最大降下速度以上の速度に対して設定される図2に示す限界位置Cから昇降路2の下端までの範囲に少なくとも設置される。したがって限界位置Cよりも上から第4の電磁石34を設置してもよい。この第4の電磁石34は、乗籠3の移動方向に並ぶ複数のユニット341によって構成されている。
【0031】
各ユニット341は、第1の電磁石42のコイルセグメント421や第3の電磁石33のユニット331と同様に個別に制御され所望する磁場を発生する。第2の実施形態の場合、第3の電磁石33が形成する磁場に対して作用することで、第3の電磁石33を上方へ引き上げる方向に磁力を発生させるように、第4の電磁石34は制御される。
【0032】
また、このエレベータ1において、第3の電磁石33および第4の電磁石34が発生する磁場が乗籠3に入らないように、乗籠3は、図3に示すように側壁の外側で第3の電磁石33との間に磁気遮蔽材35を有している。乗籠3は、天井や床にも磁気遮蔽材を配置してもよい。
【0033】
このように構成されたエレベータ1において、最大速度を超えて乗籠3が降下し、かつ巻上機6のブレーキや、ガバナーに連動する非常停止装置によっても乗籠3を停止できない場合、速度センサ31および位置検出センサ32の出力信号を基に、緩衝制御装置71は、第1の電磁石42を作動させて釣合錘4を減速させるとともに、第3の電磁石33および第4の電磁石34を作動させて乗籠3も減速させる。
【0034】
このように、第2の実施形態のエレベータ1は、釣合錘4側だけでなく乗籠3側にも電磁石を配置して乗籠3を減速させる。したがって、第1の永久磁石41、第1の電磁石42、第2の電磁石43、第3の電磁石33、第4の電磁石34として、磁力の小さいものを採用することができ、装置が嵩張らない。
【0035】
第1の電磁石42、第2の電磁石43、第3の電磁石33、第4の電磁石34は、停電などによって外部から電力を得られない場合にも作動するように、二次電池72に接続される。第1の実施形態と同様にエレベータ1が通常運転している間、二次電池72は、乗籠3が最下階に接近して釣合錘4が第1の電磁石42および第2の電磁石に接近する場合、および乗籠3が最下階から他の階へ移動して釣合錘4が第1の電磁石42および第2の電磁石43から離間する場合、それぞれにおいて第1の永久磁石41と第1の電磁石42および第2の電磁石43との間に発生する誘導起電力によって蓄電される。二次電池72の容量を超えて発生される電力は、エレベータ1の他の部分で消費する。また、第1の電磁石42および第2の電磁石43で発生する電力を第3の電磁石33および第4の電磁石34に供給して、最下階における乗籠3の制動に利用してもよい。
【0036】
第3の電磁石33および第4の電磁石34は、乗籠3の移動方向に同じピッチで配列されていてもよいし、異なるピッチで配列されていてもよい。第3の電磁石33と第4の電磁石34は、乗籠3の位置に応じて乗籠3を上方へ引き上げる方向へ最大の力を発揮するように、緩衝制御装置71によって各ユニット331,341の電流の向きをスイッチングされる。
【0037】
なお、乗籠3に搭載される第3の電磁石33の代わりに第3の永久磁石を搭載してもよい。その場合、第3の永久磁石の磁場を打ち消すための消磁コイルを設置する。消磁コイルに必要な電力は、乗籠3に接続されるテールコードを介して供給し、第3の永久磁石と第4の電磁石34によって乗籠3を減速させる場合に、消磁コイルに通じる電力を遮断する。
【0038】
第3の実施形態のエレベータ1について図4を参照して説明する。図4に示すエレベータにおいて、メインロープ5は、乗籠3の下部をくぐるように巻き掛けられるとともに、釣合錘4の上部に取り付けられたプーリ4Bにも巻き掛けられた、いわゆる「2:1形」にローピングされている。したがって、メインロープ5の端部5aは、籠用ガイドレール3Aの上端および錘用ガイドレール4Aの上端に用意されるロープヒッチに固定される。第1の実施形態のエレベータ1と同じ機能を有する構成は、図4中において同一の符号を付し、その詳細な説明は、第1の実施形態の記載を参酌する。
【0039】
第3の実施形態のエレベータ1は、釣合錘4に搭載された第1の永久磁石41の磁力を相殺する磁場を発生させるために、釣合錘4に消磁コイル46を搭載している。この場合、消磁コイル46は、錘用ガイドレール4Aを介して電力が供給される。なお、釣合錘4に対して電力供給用のケーブルを乗籠3のテールコードと同様に接続するか、乗籠3の下部から釣合錘4の下部に接続されるコンペンセイティングロープに電力供給用のケーブルを加えて電力を供給してもよい。また、釣合錘4に二次電池を搭載して電力をまかなう場合は、エレベータ1が休止している間、あるいは、電力が低下した段階で、昇降路内に設置される給電ポイントに釣合錘4を移動させて二次電池を充電する。
【0040】
エレベータ1が通常運転中である場合は、この消磁コイル46に通電して第1の永久磁石41の磁力を弱めるまたは封じ込める。乗籠3を昇降路2の下部で停止させる必要がある場合、消磁コイル46の電力を遮断して第1の永久磁石41の磁力を発揮させる。
【0041】
また、第1の永久磁石41および消磁コイル46を搭載する代わりに、第1の永久磁石の基になる強磁性体と、これを磁化させるための着磁コイルおよび瞬発的に大きな電力を発生させるためのバッテリとを釣合錘に搭載してもよい。着磁される前の強磁性体は磁力を発揮しないので、昇降路中に浮遊する磁性粉や微物を引き付けることもない。そして、乗籠3を停止させる必要が生じた場合に、緩衝制御装置71から無線で釣合錘4に通信してバッテリの電力を放出させ着磁コイルに電流を流すことによって、強磁性体を磁化させ、永久磁石にする。第1の実施形態の場合と同様に、釣合錘4を第1の電磁石42によって減速および停止させることで、乗籠3も安全に停止させる。
【0042】
このように、第3の実施形態の第1の永久磁石41(または、強磁性体)と第1の電磁石42とは、第1の実施形態および第2の実施形態と同様に緩衝装置8として機能する。限界位置Cよりも低い位置で乗籠3を非常停止させる必要が生じた場合に備えて、機械式の緩衝装置8Mを昇降路2の床2Aに設置しても良い。この場合、乗籠3を機械式の緩衝装置のみで受け止める場合に比べて、作動ストロークの短い機械式の緩衝装置8Mを備えるだけでよい。その結果、このエレベータ1は、昇降路2のピットを浅くすることができる。
【0043】
なお、上述の各実施形態において電磁石であったものを永久磁石の基となる強磁性体およびこの強磁性体を磁化させるための着磁コイルで構成してもよい。強磁性体は、磁化していない状態において磁力が生じていない。したがって、初期設置されるときは、周囲に磁場の影響を及ぼさない。そして、緩衝装置として乗籠3を停止させる必要が生じた場合、各強磁性体に対応して配置されている着磁コイルに電流を流し、強磁性体を磁化させる。これによって発生した磁力で、乗籠3および釣合錘4を減速および停止させる。
【0044】
強磁性体を磁化させるための電力は、瞬間的なものでよいので、停電などによって電力が十分に得られない場合でも、小さな二次電池ですべての強磁性体を磁化させることも容易である。一度磁化された強磁性体は、その後、エレベータ1を通常運転するのに弊害の無いように、着磁コイルに電流を流すことで磁力を打ち消すか、着磁コイルを利用して磁化した強磁性体を脱磁するか、または、エレベータ1を復旧させる際に着磁されていない強磁性体と交換する。
【0045】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することを意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0046】
1…エレベータ、2…昇降路、2A…床、3…乗籠、4…釣合錘、5…メインロープ、6…巻上機、31…速度センサ、32…位置検出センサ、33…第3の電磁石、34…第4の電磁石、35…磁気遮蔽材、41…第1の永久磁石、42…第1の電磁石、421…コイルセグメント、43…第2の電磁石、46…消磁コイル、71…緩衝制御装置、72…二次電池、C…限界位置、8…緩衝装置(第1の永久磁石41と第1の電磁石42と第2の電磁石43)。
【特許請求の範囲】
【請求項1】
昇降路の上部に設置された巻上機にメインロープが巻き掛けられ、乗籠と釣合錘とが前記メインロープによって前記昇降路内につるべ式に吊下げられたエレベータであって、
前記釣合錘に搭載される第1の永久磁石と、
前記昇降路の床に達する直前で前記乗籠を安全に停止させるために前記乗籠の減速を開始する必要がある限界位置から前記床までの距離に少なくとも相当する距離にわたって前記昇降路の上部に配置されて前記第1の永久磁石を下方へ引き下げる方向に磁力を発生する第1の電磁石と、
前記昇降路の上端に設置されて前記第1の永久磁石と反発する磁力を発生する第2の電磁石と、を備える
ことを特徴とするエレベータ。
【請求項2】
前記乗籠の移動速度を検出する速度センサと、
前記昇降路の床から前記乗籠までの距離を測る位置検出センサと、
前記速度センサによって検出された移動速度が前記乗籠に設定される最大速度を超えている状態で前記位置検出センサによって前記限界位置が検出された場合に前記第1の電磁石を作動させる緩衝制御装置と、をさらに備える
ことを特徴とする請求項1に記載されたエレベータ。
【請求項3】
前記第1の電磁石は、前記釣合錘が移動する軌跡の周囲に配置される
ことを特徴とする請求項1に記載されたエレベータ。
【請求項4】
前記第1の電磁石および前記第2の電磁石に電力を供給する二次電池をさらに備える
ことを特徴とする請求項1に記載されたエレベータ。
【請求項5】
前記第1の電磁石および第2の電磁石が作動していない状態で前記釣合錘が移動する場合、前記第1の永久磁石と前記第1の電磁石および第2の電磁石とが相対的に移動することによって生じる誘導起電力を前記二次電池に蓄電する
ことを特徴とする請求項4に記載されたエレベータ。
【請求項6】
前記第1の電磁石は、複数のコイルセグメントによって構成され、前記昇降路の上端に近いコイルセグメントの方が強い磁力を発生する
ことを特徴とする請求項1に記載されたエレベータ。
【請求項7】
前記乗籠に搭載されて磁力を発生する第3の電磁石と、
少なくとも前記限界位置から前記昇降路の下端までの範囲に設置されて前記第3の電磁石を上方へ引き上げる方向に磁力を発生させる第4の電磁石と、をさらに備える
ことを特徴とする請求項1に記載されたエレベータ。
【請求項8】
前記乗籠は、側壁の外側に磁気遮蔽材を有し、
前記第3の電磁石は、前記磁気遮蔽材を隔てて前記乗籠の外側に配置される
ことを特徴とする請求項7に記載されたエレベータ。
【請求項9】
前記釣合錘は、前記第1の永久磁石の磁力を相殺する磁場を発生する消磁コイルを搭載し、
前記消磁コイルは、前記釣合錘を案内する錘用ガイドレールを介して給電される
ことを特徴とする請求項1に記載されたエレベータ。
【請求項10】
前記昇降路の床に単独で前記乗籠を受け止めるために必要なストロークよりも短いストロークの緩衝装置をさらに備える
ことを特徴とする請求項1に記載されたエレベータ。
【請求項11】
前記第1の永久磁石は、この基となる強磁性体と、前記強磁性体を磁化させるための着磁コイルと、前記着磁コイルに電流を流すためのバッテリーで構成され、前記乗籠を停止させる場合に、前記着磁コイルに電流を流して前記強磁性体を磁化させて作られる
ことを特徴とする請求項1に記載されたエレベータ。
【請求項1】
昇降路の上部に設置された巻上機にメインロープが巻き掛けられ、乗籠と釣合錘とが前記メインロープによって前記昇降路内につるべ式に吊下げられたエレベータであって、
前記釣合錘に搭載される第1の永久磁石と、
前記昇降路の床に達する直前で前記乗籠を安全に停止させるために前記乗籠の減速を開始する必要がある限界位置から前記床までの距離に少なくとも相当する距離にわたって前記昇降路の上部に配置されて前記第1の永久磁石を下方へ引き下げる方向に磁力を発生する第1の電磁石と、
前記昇降路の上端に設置されて前記第1の永久磁石と反発する磁力を発生する第2の電磁石と、を備える
ことを特徴とするエレベータ。
【請求項2】
前記乗籠の移動速度を検出する速度センサと、
前記昇降路の床から前記乗籠までの距離を測る位置検出センサと、
前記速度センサによって検出された移動速度が前記乗籠に設定される最大速度を超えている状態で前記位置検出センサによって前記限界位置が検出された場合に前記第1の電磁石を作動させる緩衝制御装置と、をさらに備える
ことを特徴とする請求項1に記載されたエレベータ。
【請求項3】
前記第1の電磁石は、前記釣合錘が移動する軌跡の周囲に配置される
ことを特徴とする請求項1に記載されたエレベータ。
【請求項4】
前記第1の電磁石および前記第2の電磁石に電力を供給する二次電池をさらに備える
ことを特徴とする請求項1に記載されたエレベータ。
【請求項5】
前記第1の電磁石および第2の電磁石が作動していない状態で前記釣合錘が移動する場合、前記第1の永久磁石と前記第1の電磁石および第2の電磁石とが相対的に移動することによって生じる誘導起電力を前記二次電池に蓄電する
ことを特徴とする請求項4に記載されたエレベータ。
【請求項6】
前記第1の電磁石は、複数のコイルセグメントによって構成され、前記昇降路の上端に近いコイルセグメントの方が強い磁力を発生する
ことを特徴とする請求項1に記載されたエレベータ。
【請求項7】
前記乗籠に搭載されて磁力を発生する第3の電磁石と、
少なくとも前記限界位置から前記昇降路の下端までの範囲に設置されて前記第3の電磁石を上方へ引き上げる方向に磁力を発生させる第4の電磁石と、をさらに備える
ことを特徴とする請求項1に記載されたエレベータ。
【請求項8】
前記乗籠は、側壁の外側に磁気遮蔽材を有し、
前記第3の電磁石は、前記磁気遮蔽材を隔てて前記乗籠の外側に配置される
ことを特徴とする請求項7に記載されたエレベータ。
【請求項9】
前記釣合錘は、前記第1の永久磁石の磁力を相殺する磁場を発生する消磁コイルを搭載し、
前記消磁コイルは、前記釣合錘を案内する錘用ガイドレールを介して給電される
ことを特徴とする請求項1に記載されたエレベータ。
【請求項10】
前記昇降路の床に単独で前記乗籠を受け止めるために必要なストロークよりも短いストロークの緩衝装置をさらに備える
ことを特徴とする請求項1に記載されたエレベータ。
【請求項11】
前記第1の永久磁石は、この基となる強磁性体と、前記強磁性体を磁化させるための着磁コイルと、前記着磁コイルに電流を流すためのバッテリーで構成され、前記乗籠を停止させる場合に、前記着磁コイルに電流を流して前記強磁性体を磁化させて作られる
ことを特徴とする請求項1に記載されたエレベータ。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−218888(P2012−218888A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−86549(P2011−86549)
【出願日】平成23年4月8日(2011.4.8)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月8日(2011.4.8)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
[ Back to top ]