
温度推定装置及び温度推定方法
【課題】モータの駆動停止後において、モータを備える電子機器を構成する機器構成部材の温度の推定精度を向上させることができる温度推定装置及び温度推定方法を提供する。
【解決手段】温度推定部53は、ブラシの温度暫定値TZb(n)を推定するブラシ温度暫定値演算部60と、ヨークの温度推定値Ty(n)を取得するヨーク温度推定値演算部70と、ハウジングの温度推定値Th(n)を取得するハウジング温度推定値演算部80と、ブラシの温度推定値Tb(n)を設定するブラシ温度推定値特定部90と、を備えている。ブラシ温度推定値特定部90は、モータの駆動時には、温度暫定値TZb(n)をブラシの今回の温度推定値Tb(n)とし、モータの駆動停止後には、温度暫定値TZb(n)、温度推定値Ty(n)及び温度推定値Th(n)のうち最も高温となる値に基づきブラシの今回の温度推定値Tb(n)を設定する。
【解決手段】温度推定部53は、ブラシの温度暫定値TZb(n)を推定するブラシ温度暫定値演算部60と、ヨークの温度推定値Ty(n)を取得するヨーク温度推定値演算部70と、ハウジングの温度推定値Th(n)を取得するハウジング温度推定値演算部80と、ブラシの温度推定値Tb(n)を設定するブラシ温度推定値特定部90と、を備えている。ブラシ温度推定値特定部90は、モータの駆動時には、温度暫定値TZb(n)をブラシの今回の温度推定値Tb(n)とし、モータの駆動停止後には、温度暫定値TZb(n)、温度推定値Ty(n)及び温度推定値Th(n)のうち最も高温となる値に基づきブラシの今回の温度推定値Tb(n)を設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータを備える電子機器の構成部材の温度を推定する温度推定装置及び温度推定方法に関する。
【背景技術】
【0002】
従来、モータを備える電子機器として、例えば特許文献1に記載される電動パワーステアリング装置が提案されている。この特許文献1には、モータの温度を検出するためのセンサを用いることなく、モータの温度上昇量の推定値を演算する方法が開示されている。具体的には、以下に示す関係式(式1)に基づきモータの温度上昇量の推定値(Δθ)が演算される。そして、このように演算された温度上昇量の推定値(Δθ)をモータの駆動開始前の温度に対して加算することにより、モータの温度推定値が取得される。
【0003】
【数1】

ただし、Δθ…温度上昇量の推定値、HTA…モータの駆動時における損失電力、TRS…モータの熱抵抗、t…モータの駆動時間、T…モータの熱時定数
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−34283号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一般に、モータの温度を推定する場合には、モータに設けられたブラシの温度が推定される。これは、ブラシが過熱状態になると、ブラシの故障に起因したモータの故障に繋がるためである。
【0006】
ところで、モータの駆動時では、ブラシに代表される対象部材の温度上昇量の推定値は、関係式(式1)を用いて演算される。しかし、モータの駆動停止後においては、関係式(式1)を用いた演算では、損失電力(HTA)が「0(零)」となる。すなわち、特許文献1には、モータの駆動停止後における温度変化量を推定する方法が開示されていない。
【0007】
そこで、近年では、対象部材での発熱量と対象部材からの放熱量とを推定し、該発熱量と放熱量との差分に基づき対象部材の温度変化量を推定する方法が考えられている。この方法では、モータの駆動停止時でも、対象部材の温度変化量を推定可能である。一般的に、対象部材からの放熱量は、モータの設置環境の雰囲気温度を考慮して推定される。
【0008】
しかしながら、対象部材からの放熱量は、対象部材の周辺の雰囲気温度だけではなく、対象部材の周辺に位置する周辺部材(例えば、ヨーク)の温度などによっても変動する。そのため、対象部材の周辺に位置する周辺部材の温度も考慮しつつ対象部材からの放熱量を推定しないと、モータの駆動停止後において対象部材の温度が精度良く推定されないおそれがある。
【0009】
本発明は、このような事情に鑑みてなされたものである。その目的は、モータの駆動停止後において、モータを備える電子機器を構成する機器構成部材の温度の推定精度を向上させることができる温度推定装置及び温度推定方法を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明は、モータ(20)を備える電子機器(12)を構成する機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち対象部材(28)の温度を、予め設定された周期毎に推定する温度推定装置であって、前記対象部材(28)の温度暫定値(TZb(n))を推定する暫定値推定手段(60、S17)と、前記機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち前記対象部材(28)以外の他の機器構成部材(21,30)の温度(Ty(n),Th(n))を取得する温度取得手段(70,80、S19)と、前記対象部材(28)の温度推定値(Tb(n))を設定する推定値設定手段(90、S22,S23)と、を備え、前記推定値設定手段(90、S22,S23)は、前記モータ(20)の駆動時には、前記暫定値推定手段(60、S17)によって推定された前記対象部材(28)の今回の温度暫定値(TZb(n))を、前記対象部材(28)の今回の温度推定値(Tb(n))とし、前記モータ(20)の駆動停止後には、前記モータ(20)の駆動中では前記対象部材(28)の温度暫定値(TZb(n))よりも低温であった特定の機器構成部材(21,30)の今回の温度(Ty(n),Th(n))と、前記対象部材の今回の温度暫定値(TZb(n))とのうち最も高温となる値に基づき前記対象部材(28)の今回の温度推定値(Tb(n))を設定することを要旨とする。
【0011】
モータの駆動が停止した場合には、対象部材を含む各機器構成部材の温度は低くなっていく。このとき、対象部材からの放熱量は、該対象部材の周辺に位置する他の機器構成部材の温度に応じた量になる。すなわち、対象部材のほうが特定の機器構成部材よりも高温である場合、対象部材からの放熱量は、温度差が小さいほど少なくなる。そして、対象部材の温度が特定の機器構成部材の温度と同程度となると、モータの駆動時には特定の機器構成部材よりも高温であった対象部材の温度は、特定の機器構成部材の温度よりも下回らない。
【0012】
そこで、本発明では、対象部材の温度暫定値は、該対象部材の周辺に位置する他の機器構成部材の温度とは関係なく推定される。そして、モータの駆動停止後においては、対象部材の温度暫定値と特定の機器構成部材の温度とのうち最も高温となる値に基づき、対象部材の今回の温度推定値が設定される。すなわち、モータの駆動停止後においては、対象部材の周辺に位置する他の機器構成部材の温度を加味して、対象部材の温度推定値が取得される。そのため、モータの駆動停止後において、モータを備える電子機器を構成する機器構成部材の温度の推定精度を向上させることができる。
【0013】
本発明の温度推定装置において、前記暫定値推定手段(60、S13,S15,S16,S17)は、前記モータ(20)に入力される入力エネルギに相当する入力エネルギ相当値(Pin)と前記モータ(20)から出力される出力エネルギに相当する出力エネルギ相当値(Pout)との差分に基づき、前記モータ(20)の発熱量(Ein)を演算する発熱量演算手段(63、S13)と、前記対象部材(28)の前回の温度暫定値(TZb(n−1))と前記電子機器(12)の設置環境の雰囲気温度(Tf)との差分と、前記対象部材(28)の熱特性を示す熱係数(A)とに基づき、前記対象部材(28)からの放熱量(Eout_B)を演算する放熱量演算手段(65、S15)と、前記各演算手段(63,65、S13、S15)によって演算された発熱量(Ein)と放熱量(Eout_B)との差分とに基づき前記対象部材(28)の温度上昇量(ΔTb(n))を取得し、該温度上昇量(ΔTb(n))と前記対象部材の前回の温度暫定値(TZb(n))とに基づき前記対象部材の今回の温度暫定値(TZb(n))を演算する暫定値演算手段(67、S16,S17)と、を有することが好ましい。
【0014】
上記構成によれば、モータの発熱量は、モータに入力される入力エネルギに相当する入力エネルギ相当値とモータから出力される出力エネルギに相当する出力エネルギ相当値とを用いて演算される。また、対象部材からの放熱量は、対象部材の前回の温度暫定値と雰囲気温度との差分を、対象部材の熱特性を示す熱係数で除算することにより取得される。この熱係数を、実験やシミュレーションなどによって予め設定しておくことにより、放熱量の推定精度を向上させることができる。そして、このようにして演算されたモータの発熱量と対象部材からの放熱量との差分に基づき、前回のタイミングと今回のタイミングとの間での対象部材の温度上昇量が取得される。したがって、モータの駆動時においては、精度の良い温度上昇量を用いることにより、対象部材の温度の推定精度を向上させることができる。
【0015】
本発明の温度推定装置において、前記モータ(20)は、ブラシ付きのモータであり、前記暫定値推定手段(60、S17)は、前記モータ(20)のブラシ(28)の温度暫定値(TZb(n))を、前記対象部材の温度暫定値として推定し、前記推定値設定手段(90、S22,S23)は、前記モータ(20)の駆動停止後には、前記温度取得手段(70,80、S19)によって取得された前記特定の機器構成部材(21,30)の今回の温度(Ty(n),Th(n))と、前記暫定値推定手段(60、S17)によって推定された前記ブラシ(28)の今回の温度暫定値(TZb(n))とのうち最も高温となる値に基づき前記ブラシ(28)の今回の温度推定値(Tb(n))を設定することが好ましい。
【0016】
ブラシ付きのモータでは、ブラシが摺動するため、該ブラシは高温になりやすい。こうしたブラシが温度上昇によって故障してしまうと、モータの故障にも繋がる。そのため、ブラシの温度を精度良く推定する必要がある。この点、本発明では、ブラシの温度が、精度良く推定される。そのため、ブラシが高温になり過ぎる前に、モータの駆動を制限するような制限制御を、適切なタイミングで開始させることができる。
【0017】
本発明の温度推定装置において、前記温度取得手段(70,80、S19)は、前記対象部材(28)よりも熱容量の多い他の機器構成部材(21,30)の温度(Ty(n),Th(n))を取得することが好ましい。
【0018】
モータの駆動時には、熱容量の多い部材ほど温度上昇しにくく、モータの駆動停止後には、熱容量の多い部材ほど温度低下しにくい。そのため、モータの駆動時には、対象部材の方が、該対象部材よりも熱容量の多い特定の機器構成部材よりも高温となりやすい。また、モータの駆動停止後には、対象部材の温度変化速度が、該対象部材よりも熱容量の多い特定の機器構成部材の温度変化速度よりも速くなりやすい。しかし、対象部材の温度は、特定の機器構成部材の温度に近づくと、該特定の機器構成部材の温度と同じような変化を示すようになる。
【0019】
そこで、本発明では、モータの駆動停止後においては、対象部材の温度暫定値が特定の機器構成部材の温度推定値未満となった場合に、対象部材の温度推定値は、特定の機器構成部材の温度推定値に基づいた値に設定される。このように他の機器構成部材の温度を加味して対象部材の温度を推定することにより、その推定精度を向上させることができる。
【0020】
本発明の温度推定装置において、前記温度取得手段(70,80、S13,S15,S16,S19)は、前記モータ(20)に入力される入力エネルギに相当する入力エネルギ相当値(Pin)と前記モータ(20)から出力される出力エネルギに相当する出力エネルギ相当値(Pout)との差分に基づき、前記モータ(20)の発熱量(Ein)を演算する発熱量演算手段(73,83、S13)と、前記他の機器構成部材(21,30)の前回の温度推定値(Ty(n−1),Th(n−1))と前記電子機器(12)の設置環境の雰囲気温度(Tf)との差分と、前記他の機器構成部材(21,30)の熱特性に基づく熱係数(A)とに基づき、前記他の機器構成部材(21,30)からの放熱量(Eout_Y,Eout_H)を演算する放熱量演算手段(75,85、S15)と、前記各演算手段(73,75,83,85、S13,S15)によって演算された発熱量(Ein)と放熱量(Eout_Y,Eout_H)との差分とに基づき前記他の機器構成部材(21,30)の温度上昇量(ΔTy(n),ΔTh(n))を取得し、該温度上昇量(ΔTy(n),ΔTh(n))と前記他の機器構成部材(21,30)の前回の温度推定値(Ty(n−1),Th(n−1))とに基づき前記他の機器構成部材(21,30)の今回の温度推定値(Ty(n),Th(n))を演算する推定値演算手段(77,87、S16,S19)と、を有するが好ましい。
【0021】
上記構成によれば、対象部材以外の他の機器構成部材の温度を、専用の温度センサを用いることなく推定することができる。
本発明は、モータ(20)を備える電子機器(12)を構成する機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち対象部材(28)の温度を、予め設定された周期毎に推定させるための温度推定方法であって、前記対象部材(28)の温度暫定値(TZb(n))を推定させる暫定値推定ステップ(S17)と、前記機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち前記対象部材(28)以外の他の機器構成部材(21,30)の温度(Ty(n),Th(n))を取得させる温度取得ステップ(S19)と、前記モータ(20)の駆動時に、前記暫定値推定ステップ(S17)で推定した前記対象部材(28)の温度暫定値(TZb(n))を、前記対象部材(28)の今回の温度推定値(Tb(n))とさせるモータ駆動時推定値設定ステップ(S22)と、前記モータ(20)の駆動停止後に、前記モータ(20)の駆動中には前記対象部材の温度暫定値(TZb(n))よりも低温であった特定の機器構成部材(21,30)の今回の温度(Ty(n),Th(n))と、前記対象部材(28)の今回の温度暫定値(TZb(n))とのうち最も高温となる値に基づき前記対象部材(28)の今回の温度推定値(Tb(n))を設定させるモータ停止時推定値設定ステップ(S23)と、を有することを要旨とする。
【0022】
上記構成によれば、上記温度推定装置と同等の作用・効果を得ることができる。
なお、本発明をわかりやすく説明するために実施形態を示す図面の符号に対応づけて説明したが、本発明が実施形態に限定されるものではないことは言うまでもない。
【図面の簡単な説明】
【0023】
【図1】本発明の温度推定装置を備える電子機器の一実施形態であるブレーキハイドロユニットを説明する断面図。
【図2】ブレーキハイドロユニットの概略構成を説明するブロック図。
【図3】温度推定部の機能を詳細に説明するブロック図。
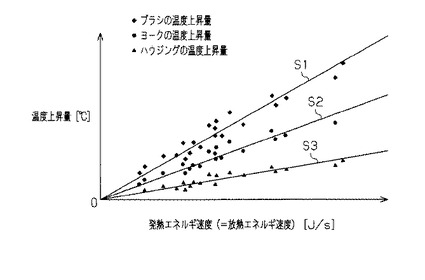
【図4】機器構成部材の発熱エネルギ速度と温度上昇量との関係を示すグラフ。
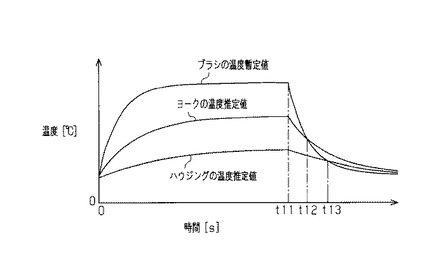
【図5】ブラシの温度暫定値、ヨークの温度推定値及びハウジングの温度推定値の変化を示すグラフ。
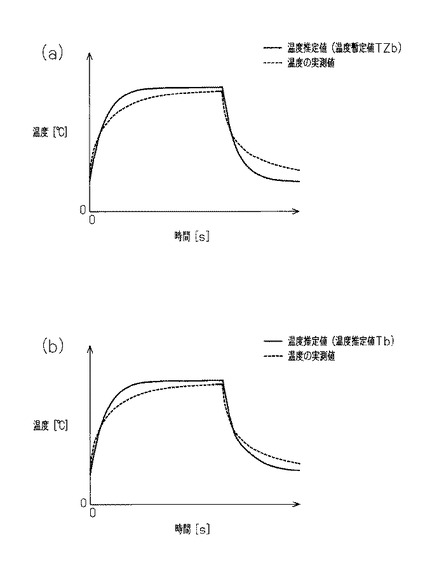
【図6】(a)はモータの停止後でも温度暫定値をブラシの温度推定値とした場合の温度推定値と温度の実測値との比較を示すグラフ、(b)はモータの停止後ではブラシの温度推定値をヨーク及びハウジングの温度推定値を考慮して設定した場合の温度推定値と温度の実測値との比較を示すグラフ。
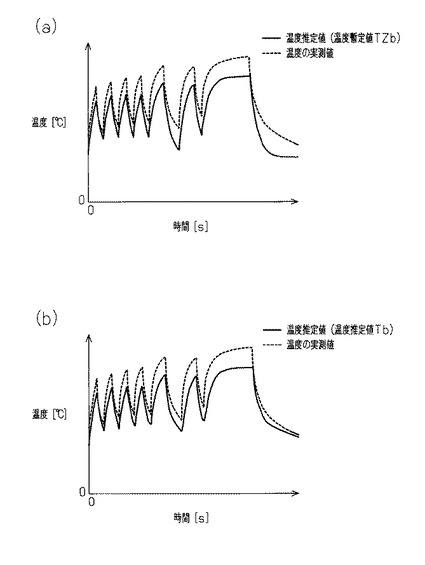
【図7】(a)はモータの停止後でも温度暫定値をブラシの温度推定値とした場合の温度推定値と温度の実測値との比較を示すグラフ、(b)はモータの停止後ではブラシの温度推定値をヨーク及びハウジングの温度推定値を考慮して設定した場合の温度推定値と温度の実測値との比較を示すグラフ。
【図8】本実施形態における温度推定処理ルーチンを説明するフローチャート。
【発明を実施するための形態】
【0024】
以下、本発明を具体化した一実施形態を図1〜図8に従って説明する。
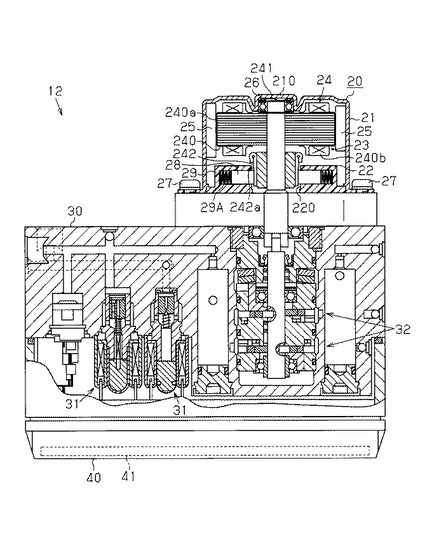
図1及び図2に示すように、本実施形態の電子機器は、車両に搭載される車輪11に対する制動力を調整すべく駆動するブレーキハイドロユニット12である。このブレーキハイドロユニット12は、モータ20と、該モータ20が取り付けられる略直方体状のハウジング(機器構成部材)30と、該ハウジング30においてモータ20の取り付け位置とは異なる位置(本実施形態では、反対側の位置)に固定される収容ケース40とを備えている。
【0025】
本実施形態のモータ20は、ブラシ付きの直流モータである。こうしたモータ20は、ハウジング30側に開口する有底略円筒状のヨーク(機器構成部材)21と、ヨーク21の開口部を閉塞する板状のエンドプレート(機器構成部材)22と、ヨーク21及びエンドプレート22によって形成された内部空間23に配置されるロータ24とを備えている。ヨーク21は、内部空間23で発生する磁気の外部への漏れを抑制する金属で構成されている。こうしたヨーク21の内周面には、周方向に沿って等間隔に複数の磁石(機器構成部材)25が固定されている。また、ヨーク21の底部の略中央には、軸受(機器構成部材)26が収容される軸受保持部210が一体的に形成されている。こうしたヨーク21は、複数(図1では2つのみ図示)のボルト27によってハウジング30に固定される。つまり、モータ20は、ヨーク21を介してハウジング30に取り付けられる。
【0026】
エンドプレート22は、合成樹脂によって構成されている。こうしたエンドプレート22の中央には、板厚方向に貫く貫通孔220が形成されている。また、エンドプレート22には、ロータ24に摺接する複数のブラシ(機器構成部材)28を保持するブラシホルダ29が一体的に形成されている。このブラシホルダ29は、ブラシ28の径方向外側に配置される付勢部材(機器構成部材)29Aを介して対象部材の一例としてのブラシ28を保持している。すなわち、ブラシ28は、付勢部材29Aによって径方向内側に付勢されている。
【0027】
ロータ24の電機子240は、ヨーク21に固定された磁石25に対向して配置されている。こうした電機子240は、コア(機器構成部材)240aと、該コア240aに巻回された複数の電機子コイル(機器構成部材)240bとを有している。ロータ24の出力軸(機器構成部材)241は、軸受保持部210内に収容された軸受26を介して回転自在な状態でヨーク21に支持されている。こうした出力軸241に、電機子240が固定されている。また、出力軸241は、エンドプレート22に形成された貫通孔220を貫いてハウジング30内に突出している。ロータ24の整流子(機器構成部材)242は、出力軸241において電機子240よりもハウジング30側の部分に固定されている。こうした整流子242の外周には、電機子コイル240bに電気的に接続された複数の整流子片242aが周方向に沿って等間隔で配設されている。
【0028】
各ブラシ28は、整流子242の径方向外側に配置されている。こうした各ブラシ28は、整流子242の整流子片242aに摺接している。そして、ブラシ28からは、整流子片242aを介して電機子コイル240bに電流が供給される。
【0029】
ハウジング30は、重量及び剛性の観点で優れた材料(例えば、アルミニウムなどの金属)で構成されている。こうしたハウジング30内には、車輪11に対する制動力を調整するための各種電磁弁31及びモータ20を駆動源とする駆動部の一例としてのポンプ32などが収容されている。そして、各種電磁弁31及びポンプ32の作動によって、車両の車輪11に設けられたホイールシリンダ33内の液圧が調整される。その結果、車輪11には、ホイールシリンダ33の液圧に応じた制動力が付与される。
【0030】
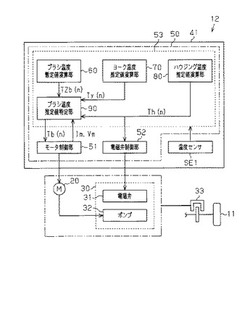
収容ケース40内には、回路基板41が収容されている。この回路基板41には、図2に示すように、CPU、ROM及びRAMなどで構成される制御装置50と、回路基板41の温度を検出するための温度センサSE1と、電磁弁31やモータ20を駆動させるための各種ドライバー回路(図示略)となどが設けられている。
【0031】
次に、本実施形態の制御装置50について図2、図3及び図4を参照して説明する。
図2に示すように、制御装置50は、ソフトウエアによって構築される機能部として、モータ20の制御を司るモータ制御部51、各種電磁弁31の制御を司る電磁弁制御部52及び温度推定装置の一例としての温度推定部53を備えている。
【0032】
モータ制御部51には、モータ20に流れる電流値を検出するための電流センサ(図示略)と、モータ20に印加される電圧値を検出するための電圧センサ(図示略)とが電気的に接続されている。そして、モータ制御部51は、各センサからの検出信号に基づき、モータ20に流れる電流値Imと、モータ20に印加される電圧値Vmとを取得する。そして、モータ制御部51は、取得した電流値Im及び電圧値Vmを特定するための入力情報を温度推定部53に出力する。
【0033】
また、モータ制御部51には、温度推定部53によって演算されたモータ20のブラシ28の温度推定値Tb(n)を特定するための温度情報が入力される。そして、モータ制御部51は、入力された温度情報で特定される温度推定値Tb(n)が、モータ20が過熱状態であるか否かを判断するために予め設定された温度閾値以上であるか否かを判定する。モータ制御部51は、温度推定値Tb(n)が温度閾値未満である場合にはモータ20の制御を継続する一方、温度推定値Tb(n)が温度閾値以上である場合にはモータ20の駆動を制限する制限制御を行う。なお、制限制御としては、例えば、一定期間の間、モータ20の駆動を禁止する制御、規定速度以上でのモータ20の駆動を規制する制御などが挙げられる。
【0034】
電磁弁制御部52には、温度推定部53によって演算されたハウジング30の温度推定値Th(n)を特定するための温度情報が入力される。そして、電磁弁制御部52は、入力された温度情報で特定されるハウジング30の温度推定値Th(n)に基づき、電磁弁31に流す電流値を設定する。すなわち、電磁弁31に流す電流値は、ハウジング30の温度推定値Th(n)によって補正される。
【0035】
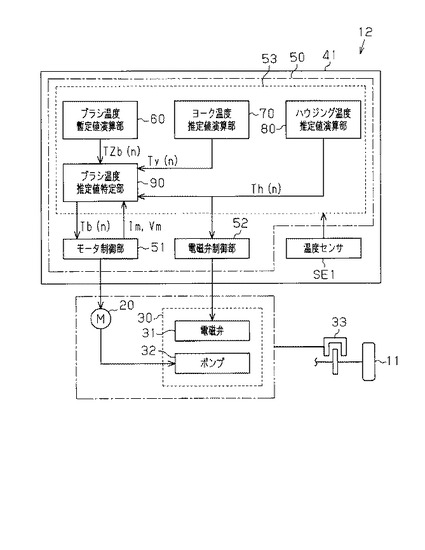
温度推定部53は、ブレーキハイドロユニット12を構成する複数の機器構成部材の温度を推定する。具体的には、温度推定部53は、モータ20のブラシ(対象部材)28と、モータ20を構成する部材のうちブラシ28以外の他の機器構成部材の一例としてのヨーク21及びハウジング30の温度を推定する。こうした温度推定部53は、機能部として、暫定値推定手段の一例としてのブラシ温度暫定値演算部60と、温度取得手段の一例としてのヨーク温度推定値演算部70と、温度取得手段の一例としてのハウジング温度推定値演算部80と、推定値設定手段の一例としてのブラシ温度推定値特定部90とを有している。なお、ヨーク21及びハウジング30の熱容量は、ブラシ28の熱容量よりも多い。つまり、本実施形態では、ヨーク21及びハウジング30が、特定の機器構成部材に該当する。
【0036】
まず、ブラシ温度暫定値演算部60について説明する。
ブラシ温度暫定値演算部60は、モータ20での発熱量及びブラシ28からの放熱量などを考慮し、ブラシ28の温度暫定値TZb(n)を演算する。こうしたブラシ温度暫定値演算部60は、図3に示すように、機能部として、入力電力演算部61、出力電力演算部62、発熱エネルギ演算部63、雰囲気温度演算部64、放熱エネルギ演算部65、温度上昇量演算部66、温度暫定値演算部67及び温度暫定値記憶部68を有している。
【0037】
入力電力演算部61は、モータ20に入力される入力エネルギに相当する入力エネルギ相当値の一例として、モータ20に入力される入力電力Pinを演算する。具体的には、入力電力演算部61は、モータ制御部51からの入力情報で特定される電流値Im及び電圧値Vmを下記の関係式(式2)に代入することにより、入力電力Pinを演算する。そして、入力電力演算部61は、演算した入力電力Pinを発熱エネルギ演算部63に出力する。
【0038】
【数2】
出力電力演算部62は、モータ20から出力される出力エネルギに相当する出力エネルギ相当値の一例として、モータ20から出力される出力電力Poutを演算する。具体的には、出力電力演算部62は、モータ制御部51からの入力情報で特定される電流値Imに含まれるリップル(即ち、周期的な変動)の周期等に基づき、モータ20の回転数N及び駆動トルクTを推定する。続いて、出力電力演算部62は、モータ20の出力軸241の回転数N及びモータ20の駆動トルクTを下記の関係式(式3)に代入することにより、出力電力Poutを演算する。そして、出力電力演算部62は、演算した出力電力Poutを発熱エネルギ演算部63に出力する。
【0039】
【数3】
発熱エネルギ演算部63は、モータ20の単位時間あたりの発熱量である発熱エネルギ速度Einを演算する。この発熱エネルギ速度Einの単位は、「J/s(ジュール/秒)」である。具体的には、発熱エネルギ演算部63は、入力電力演算部61で演算された入力電力Pinから出力電力演算部62で演算された出力電力Poutを減算し、該減算結果(=Pin−Pout)をモータ20の発熱エネルギ速度Einとする。本実施形態では、モータ20の単位時間あたりの発熱量のことを、単位が「J(ジュール)」を「時間(秒)」で除算した値であることを明確にするために「発熱エネルギ速度」と称する。そして、発熱エネルギ演算部63は、演算した発熱エネルギ速度Einを温度上昇量演算部66に出力する。したがって、本実施形態では、発熱エネルギ演算部63が、入力電力Pinと出力電力Poutとの差分(=Pin−Pout)に基づき、モータ20の発熱エネルギ速度Einを演算する発熱量演算手段として機能する。
【0040】
雰囲気温度演算部64は、回路基板41に設けられた温度センサSE1からの検出信号に基づき、収容ケース40内の温度を検出すると共に、該収容ケース40内の温度に基づきモータ20の設置環境の雰囲気温度Tfを推定する。例えば、雰囲気温度演算部64は、検出した収容ケース40内の温度に予め設定されたオフセット値を加算し、該値を雰囲気温度Tfとする。オフセット値は、収容ケース40内とモータ20の周辺との温度差に相当する値であって、実験やシミュレーションなどによって設定される。そして、雰囲気温度演算部64は、演算した雰囲気温度Tfを放熱エネルギ演算部65に出力する。
【0041】
放熱エネルギ演算部65は、モータ20から放出される単位時間あたりの放熱量である放熱エネルギ速度Eout(Eout_B)を演算する。この放熱エネルギ速度Eoutの単位は、「J/s(ジュール/秒)」である。具体的には、放熱エネルギ演算部65は、前回のタイミングで演算したブラシ28の温度暫定値TZb(n−1)を温度暫定値記憶部68から読み出す。そして、放熱エネルギ演算部65は、ブラシ28の前回の温度暫定値TZb(n−1)、雰囲気温度演算部64によって演算された雰囲気温度Tf及びブラシ28の熱特性を示す熱係数Aを下記の関係式(式3)に代入することにより、モータ20からの放熱エネルギ速度Eout_Bを演算する。続いて、放熱エネルギ演算部65は、演算したブラシ28からの放熱エネルギ速度Eout_Bを温度上昇量演算部66に出力する。したがって、本実施形態では、放熱エネルギ演算部65が、ブラシ28の前回の温度暫定値TZb(n−1)と雰囲気温度Tfとの差分と、ブラシ28の熱特性を示す熱係数Aとに基づき、ブラシ28からの放熱エネルギ速度Eout_Bを演算する放熱量演算手段として機能する。本実施形態では、対象部材から放出される単位時間あたりの放熱量のことを、単位が「J(ジュール)」を「時間(秒)」で除算した値であることを明確にするために「放熱エネルギ速度」と称する。
【0042】
【数4】
ここで、ブラシ28、ヨーク21及びハウジング30などの機器構成部材の熱特性を示す熱係数Aについて、図4を参照して説明する。熱係数Aとは、図4に示す対象部材に伝達された発熱エネルギ速度と、対象部材の温度上昇量の増加量との関係(図4における各直線の傾き)を示す係数である。
【0043】
図4に示すグラフは、以下に説明するようにして作成される。
まず始めに、規定の温度雰囲気(例えば、30℃)の基で、機器構成部材に温度センサを取り付けると共に、モータ20の回転数N及び駆動トルクTを計測できる状態にしてモータ20が駆動される。このとき、モータ20には、所定の電流値Im、電圧値Vmが与えられる。こうしたモータ20の駆動により、発熱エネルギ速度のほうが放熱エネルギ速度よりも大きい間では、機器構成部材の温度が上昇する。しかし、機器構成部材の温度が上昇すると、次第に放熱エネルギ速度が大きくなり、機器構成部材の温度上昇速度が低下する。そして、発熱エネルギ速度と放熱エネルギ速度とが釣り合うようになると、機器構成部材の温度が変化しない状態になる。その後、モータ20に与えられる電流値Im、電圧値Vmを上記関係式(式2)に代入することにより、モータ20に対する入力電力Pinが演算され、上記関係式(式3)に基づき、モータ20からの出力電力Poutが演算され、さらに、温度センサからの検出信号に基づき機器構成部材の温度が検出される。
【0044】
そして、機器構成部材の温度が変化しない状態になってから演算された入力電力Pinから出力電力Poutを減算することにより、モータ20の発熱エネルギ速度Einが演算される。このように演算されたモータ20の発熱エネルギ速度Einと、モータ20の駆動を開始させてからの機器構成部材の温度上昇量とが計測結果として取得される。こうした計測結果は、モータ20に対する入力電力Pinを変更して複数取得される。そして、取得された複数の計測結果をプロットすることにより、図4に示すグラフが作成される。
【0045】
なお、機器構成部材の温度が変化しない状態とは、モータ20の発熱エネルギ速度Einと機器構成部材からの放熱エネルギ速度Eoutとが釣り合っている状態である。そのため、機器構成部材の温度が変化しない状態で演算された入力電力Pin及び出力電力Poutに基づいたモータ20の発熱エネルギ速度Einは、この時点での機器構成部材からの放熱エネルギ速度Eoutと言い換えてもよい。つまり、図4に示すグラフは、機器構成部材からの放熱エネルギ速度Eoutと機器構成部材の温度上昇量との関係を説明するグラフでもある。
【0046】
図4からも明らかなように、機器構成部材の一例であるブラシ28の温度上昇量は、モータ20の発熱エネルギ速度Einの値が大きいほど多い。しかも、ブラシ28の温度上昇量と発熱エネルギ速度Einとの間には、比例関係がある。つまり、ブラシ28の温度上昇量と発熱エネルギ速度Einとの関係は、一次関数で示すことができる。図4では、温度上昇量と発熱エネルギ速度Einとの関係を示す一次関数は、第1の直線S1で示されている。そして、この第1の直線S1を示す式の傾きが、ブラシ28の熱係数Aに相当する。
【0047】
同様に、機器構成部材の一例であるヨーク21の温度上昇量とモータ20の発熱エネルギ速度Einとの間には、比例関係がある。つまり、ヨーク21の温度上昇量と発熱エネルギ速度Einとの関係は、一次関数で示される。図4では、ヨーク21の温度上昇量と発熱エネルギ速度Einとの関係を示す一次関数は、第2の直線S2で示されている。そして、この第2の直線S2を示す式の傾きが、ヨーク21の熱係数Aに相当する。
【0048】
同様に、機器構成部材の一例であるハウジング30の温度上昇量とモータ20の発熱エネルギ速度Einとの間には、比例関係がある。つまり、ハウジング30の温度上昇量と発熱エネルギ速度Einとの関係は、一次関数で示される。図4では、ハウジング30の温度上昇量と発熱エネルギ速度Einとの関係を示す一次関数は、第3の直線S3で示されている。そして、この第3の直線S3を示す式の傾きが、ハウジング30の熱係数Aに相当する。
【0049】
本実施形態では、ブラシ28、ヨーク21及びハウジング30のうち、ブラシ28の熱係数Aが最も大きく、ヨーク21の熱係数Aが二番目に大きく、ハウジング30の熱係数Aが最も小さい。これは、機器構成部材を構成する材質、機器構成部材の体積、モータ20と機器構成部材との距離などによって決まる(図1参照)。そして、このように取得された各部材の熱係数Aは、予め用意されている。
【0050】
図3に示すように、温度上昇量演算部66は、ブラシ28の単位時間あたりの温度上昇量の推定値である温度上昇速度ΔTb(n)を演算する。具体的には、温度上昇量演算部66は、発熱エネルギ演算部63で演算された発熱エネルギ速度Einと、放熱エネルギ演算部65で演算された放熱エネルギ速度Eout(Eout_B)とを下記の関係式(式5)に代入することにより、ブラシ28の温度上昇速度ΔTb(n)を演算する。そして、温度上昇量演算部66は、演算した温度上昇速度ΔTb(n)を温度暫定値演算部67に出力する。なお、ブラシ28用の係数Kは、「1J(ジュール)」当りの温度上昇量を示す定数であって、ブラシ28でのエネルギの出入りによって該ブラシ28の温度がどのように変化するかを示す比例定数である。
【0051】
【数5】
温度暫定値演算部67は、ブラシの今回の温度暫定値TZb(n)を演算する。具体的には、温度暫定値演算部67は、温度上昇量演算部66で演算された温度上昇速度ΔTb(n)と、温度暫定値記憶部68に記憶されるブラシ28の前回の温度暫定値TZb(n−1)とを下記の関係式(式6)に代入することにより、ブラシ28の今回の温度暫定値TZb(n)を演算する。関係式(式6)における時間tsは、温度暫定値TZbの演算間隔に相当する時間である。つまり、関係式(式6)における「ΔTb(n)・ts」は、所定周期に相当する時間でのブラシ28の温度上昇量の推定値に相当する。したがって、本実施形態では、温度上昇量演算部66及び温度暫定値演算部67により、ブラシ28の今回の温度暫定値TZb(n)を演算する暫定値演算手段が構成される。そして、温度暫定値演算部67は、演算したブラシ28の今回の温度暫定値TZb(n)を、温度暫定値記憶部68に記憶すると共に、ブラシ温度推定値特定部90に出力する。
【0052】
【数6】
次に、ヨーク温度推定値演算部70について説明する。
【0053】
ヨーク温度推定値演算部70は、モータ20での発熱量及びヨーク21からの放熱量などを考慮し、ヨーク21の温度推定値Ty(n)を演算する。こうしたヨーク温度推定値演算部70は、機能部として、入力電力取得部71、出力電力取得部72、発熱エネルギ演算部73、雰囲気温度取得部74、放熱エネルギ演算部75、温度上昇量演算部76、温度推定値演算部77及び温度推定値記憶部78を有している。
【0054】
入力電力取得部71は、ブラシ温度暫定値演算部60の入力電力演算部61で演算された入力電力Pinを取得し、該入力電力Pinを発熱エネルギ演算部73に出力する。
出力電力取得部72は、ブラシ温度暫定値演算部60の出力電力演算部62で演算された出力電力Poutを取得し、該出力電力Poutを発熱エネルギ演算部73に出力する。
【0055】
発熱エネルギ演算部73は、ブラシ温度暫定値演算部60の発熱エネルギ演算部63と同一方法で、モータ20の単位時間あたりの発熱量である発熱エネルギ速度Einを演算し、該発熱エネルギ速度Einを温度上昇量演算部76に出力する。したがって、本実施形態では、発熱エネルギ演算部73が、入力電力Pinと出力電力Poutとの差分(=Pin−Pout)に基づき、モータ20の発熱エネルギ速度Einを演算する発熱量演算手段として機能する。
【0056】
雰囲気温度取得部74は、ブラシ温度暫定値演算部60の雰囲気温度演算部64で演算された雰囲気温度Tfを取得し、該雰囲気温度Tfを放熱エネルギ演算部75に出力する。
【0057】
放熱エネルギ演算部75は、ヨーク21から放出される単位時間あたりの放熱量である放熱エネルギ速度Eoutを演算する。具体的には、放熱エネルギ演算部75は、前回のタイミングで演算したヨーク21の温度推定値Ty(n−1)を温度推定値記憶部78から読み出す。そして、放熱エネルギ演算部75は、上記関係式(式4)を利用し、ヨーク21からの放熱エネルギ速度Eout(Eout_Y)を演算する。このとき、放熱エネルギ演算部75は、ブラシ28の前回の温度暫定値TZb(n−1)の代わりに、ヨーク21の前回の温度推定値Ty(n−1)を代入することにより、ヨーク21からの放熱エネルギ速度Eout_Yを演算する。したがって、本実施形態では、放熱エネルギ演算部75が、ヨーク(他の機器構成部材)21の前回の温度推定値Ty(n−1)と雰囲気温度Tfとの差分と、ヨーク21の熱特性を示す熱係数Aとに基づき、ヨーク21からの放熱エネルギ速度Eout_Yを演算する放熱量演算手段として機能する。
【0058】
温度上昇量演算部76は、ヨーク21の単位時間あたりの温度上昇量の推定値である温度上昇速度ΔTy(n)を演算する。具体的には、温度上昇量演算部76は、発熱エネルギ演算部73で演算された発熱エネルギ速度Einと、放熱エネルギ演算部75で演算された放熱エネルギ速度Eout(Eout_Y)とを上記関係式(式5)に代入することにより、ヨーク21の温度上昇速度ΔTy(n)を演算する。この場合、ヨーク21用の係数Kには、ヨーク21の熱容量の逆数が設定される。そして、温度上昇量演算部76は、演算した温度上昇速度ΔTy(n)を温度推定値演算部77に出力する。
【0059】
温度推定値演算部77は、上記関係式(式6)を利用し、ヨーク21の今回の温度推定値Ty(n)を演算する。このとき、温度推定値演算部77は、ブラシ28の前回の温度暫定値TZb(n−1)の代わりにヨーク21の前回の温度推定値Ty(n−1)を代入すると共に、ブラシ28の温度上昇速度ΔTb(n)の代わりにヨーク21の温度上昇速度ΔTy(n)を代入する。したがって、本実施形態では、温度上昇量演算部76及び温度推定値演算部77により、ヨーク(他の機器構成部材)21の今回の温度推定値Ty(n)を推定する推定値演算手段が構成される。そして、温度推定値演算部77は、演算したヨーク21の今回の温度推定値Ty(n)を、温度推定値記憶部78に記憶すると共に、ブラシ温度推定値特定部90に出力する。
【0060】
次に、ハウジング温度推定値演算部80について説明する。
ハウジング温度推定値演算部80は、モータ20での発熱量及びハウジング30からの放熱量などを考慮し、ハウジング30の温度推定値Th(n)を演算する。こうしたハウジング温度推定値演算部80は、機能部として、入力電力取得部81、出力電力取得部82、発熱エネルギ演算部83、雰囲気温度取得部84、放熱エネルギ演算部85、温度上昇量演算部86、温度推定値演算部87及び温度推定値記憶部88を有している。
【0061】
入力電力取得部81は、ブラシ温度暫定値演算部60の入力電力演算部61で演算された入力電力Pinを取得し、該入力電力Pinを発熱エネルギ演算部83に出力する。
出力電力取得部82は、ブラシ温度暫定値演算部60の出力電力演算部62で演算された出力電力Poutを取得し、該出力電力Poutを発熱エネルギ演算部83に出力する。
【0062】
発熱エネルギ演算部83は、ブラシ温度暫定値演算部60の発熱エネルギ演算部63と同一方法で、モータ20の単位時間あたりの発熱量である発熱エネルギ速度Einを演算し、該発熱エネルギ速度Einを温度上昇量演算部86に出力する。したがって、本実施形態では、発熱エネルギ演算部83が、入力電力Pinと出力電力Poutとの差分(=Pin−Pout)に基づき、モータ20の発熱エネルギ速度Einを演算する発熱量演算手段として機能する。
【0063】
雰囲気温度取得部84は、ブラシ温度暫定値演算部60の雰囲気温度演算部64で演算された雰囲気温度Tfを取得し、該雰囲気温度Tfを放熱エネルギ演算部85に出力する。
【0064】
放熱エネルギ演算部85は、ハウジング30から放出される単位時間あたりの放熱量である放熱エネルギ速度Eout(Eout_H)を演算する。具体的には、放熱エネルギ演算部85は、前回のタイミングで演算したハウジング30の温度推定値Th(n−1)を温度推定値記憶部88から読み出す。そして、放熱エネルギ演算部85は、上記関係式(式4)を利用し、ハウジング30からの放熱エネルギ速度Eout_Hを演算する。このとき、放熱エネルギ演算部85は、ブラシ28の前回の温度暫定値TZb(n−1)の代わりに、ハウジング30の前回の温度推定値Th(n−1)を代入することにより、ハウジング30からの放熱エネルギ速度Eout_Hを演算する。したがって、本実施形態では、放熱エネルギ演算部85が、ハウジング(他の機器構成部材)30の前回の温度推定値Th(n−1)と雰囲気温度Tfとの差分と、ハウジング30の熱特性を示す熱係数Aとに基づき、ハウジング30からの放熱エネルギ速度Eout_Hを演算する放熱量演算手段として機能する。
【0065】
温度上昇量演算部86は、ハウジング30の単位時間あたりの温度上昇量の推定値である温度上昇速度ΔTh(n)を演算する。具体的には、温度上昇量演算部86は、発熱エネルギ演算部83で演算された発熱エネルギ速度Einと、放熱エネルギ演算部85で演算された放熱エネルギ速度Eout(Eout_H)とを上記関係式(式5)に代入することにより、ハウジング30の温度上昇速度ΔTh(n)を演算する。この場合、ハウジング30用の係数Kには、ハウジング30の熱容量の逆数が設定される。そして、温度上昇量演算部86は、演算した温度上昇速度ΔTh(n)を温度推定値演算部87に出力する。
【0066】
温度推定値演算部87は、上記関係式(式6)を利用し、ハウジング30の今回の温度推定値Th(n)を演算する。このとき、温度推定値演算部87は、ブラシ28の前回の温度暫定値TZb(n−1)の代わりにハウジング30の前回の温度推定値Th(n−1)を代入すると共に、ブラシ28の温度上昇速度ΔTb(n)の代わりにハウジング30の温度上昇速度ΔTh(n)を代入する。したがって、本実施形態では、温度上昇量演算部86及び温度推定値演算部87により、ハウジング(他の機器構成部材)30の今回の温度推定値Th(n)を推定する推定値演算手段が構成される。そして、温度推定値演算部87は、演算したハウジング30の今回の温度推定値Th(n)を、温度推定値記憶部88に記憶すると共に、ブラシ温度推定値特定部90に出力する。
【0067】
次に、ブラシ温度推定値特定部90について説明する。
ブラシ温度推定値特定部90は、ブラシ28の今回の温度暫定値TZb(n)、ヨーク21の今回の温度推定値Tb(n)及びハウジング30の今回の温度推定値Th(n)に基づき、ブラシ28の今回の温度推定値Tb(n)を特定(設定)する。具体的には、ブラシ温度推定値特定部90は、モータ20の駆動時には、ブラシ28の今回の温度暫定値TZb(n)を、ブラシ28の今回の温度推定値Tb(n)とする。一方、ブラシ温度推定値特定部90は、モータ20の駆動後の停止時には、ブラシ28の今回の温度暫定値TZb(n)、ヨーク21の今回の温度推定値Tb(n)及びハウジング30の今回の温度推定値Th(n)のうち、最も大きな値をブラシ28の今回の温度推定値Tb(n)とする。
【0068】
ここで、上記の方法でブラシ28の温度を推定する理由について、図5〜図7を参照して説明する。
図5に示すグラフには、ブラシ28の温度暫定値TZb、ヨーク21の温度推定値Ty及びハウジング30の温度推定値Thがプロットされている。図5に示すように、モータ20の駆動中においては、自身が発熱源でもあり且つ熱容量が最も少ないブラシ28の温度暫定値TZbは、ヨーク21及びハウジング30の温度推定値Ty,Thに比べて大きな値になる。また、2番目に熱容量の少ないヨーク21の温度推定値Tyは、ハウジング30の温度推定値Thに比べて大きな値になる。
【0069】
その一方で、モータ20の駆動が停止する第1のタイミングt11以降では、ブラシ28の温度暫定値TZb、ヨーク21及びハウジング30の温度推定値Ty,Thは、小さくなる。特に熱容量の最も少ないブラシ28の温度暫定値TZbは、急激に小さくなる。そして、ブラシ28の温度暫定値TZbは、第2のタイミングt12を経過した時点で、ヨーク21の温度推定値Tyよりも小さくなり、その後の第3のタイミングt13を経過した時点で、ハウジング30の温度推定値Thよりも小さくなる。
【0070】
しかし、モータ20の駆動停止後では、ブラシ28の温度は、図5での温度暫定値TZbのように変化しない。すなわち、ブラシ28からの実際の放熱エネルギ速度は、特にモータ20の停止時では、ブラシ28周辺の温度、即ち雰囲気温度Tfだけではなく、ブラシ28の周辺に位置する他の部材(この場合、ヨーク21やハウジング30)の温度によって決まる。ヨーク21及びハウジング30の熱容量がブラシ28よりも熱容量が多いため、ヨーク21及びハウジング30の温度はブラシ28のように急激には低下しない。
【0071】
つまり、モータ20の停止後において、ブラシ28のほうがヨーク21よりも高温である間では、ブラシ28からヨーク21やハウジング30側に熱が移動するため、ブラシ28の温度が急激に変化する。しかし、ブラシ28とヨーク21とがほぼ同一温度となると、ブラシ28とヨーク21との間での熱移動がほとんど無くなり、ブラシ28の温度は、ヨーク21の温度を大きく下回らない。すなわち、ブラシ28の温度は、ヨーク21の温度と略同一速度で低下するようになる。
【0072】
上記第2のタイミングt12が経過すると、ブラシ28及びヨーク21の熱は、ブラシ28及びヨーク21よりも高温のハウジング30側に移動する。しかし、ブラシ28及びヨーク21の温度がハウジング30の温度とほぼ同一温度となると、ブラシ28及びヨーク21とハウジング30との間での熱移動がほとんど無くなり、ブラシ28及びヨーク21の温度は、ハウジング30の温度を大きく下回らない。すなわち、ブラシ28及びヨーク21の温度は、ハウジング30の温度と略同一速度で低下するようになる。
【0073】
これに対し、温度暫定値TZbは、モータ20での発熱エネルギ速度Einと、雰囲気温度Tfを利用して演算される放熱エネルギ速度Eout_Bとに基づき演算される。すなわち、温度暫定値TZbは、ブラシ28の周辺に位置する他の機器構成部材の温度を加味することなく演算された値である。そのため、図6(a)に示すように、モータ20の駆動停止後では、温度暫定値TZbは、ブラシ28の実際の温度から大きく乖離するおそれがある。
【0074】
そこで、本実施形態では、モータ20の駆動中及び駆動停止後から第2のタイミングt12までは、温度暫定値TZbがヨーク21及びハウジング30の温度推定値Ty,Thよりも高温であるため、温度暫定値TZbがブラシ28の温度推定値Tbとされる。また、第2のタイミングt12以降からヨーク21の温度推定値Tyがハウジング30の温度推定値Th未満になるまでの間では、温度暫定値TZbがヨーク21の温度推定値Tyを下回るため、ヨーク21の温度推定値Tyが、ブラシ28の温度推定値Tbとされる。そして、ヨーク21の温度推定値Tyがハウジング30の温度推定値Th未満になった場合では、ハウジング30の温度推定値Thが、ブラシ28の温度推定値Tbとされる。その結果、図6(a)(b)に示すように、モータ20の駆動停止後において、ブラシ28の温度推定値Tbは、温度暫定値TZbと比較してブラシ28の温度の実測値に近い値となる。
【0075】
図7(a)(b)には、モータ20の駆動と停止とを連続して繰り返す場合のブラシ28の温度暫定値TZbとブラシ28の温度推定値Tbとの変動する様子が示されている。図7(a)(b)に示すように、モータ20の駆動と停止とを連続して繰り返す場合であっても、本実施形態の推定方法で設定したブラシ28の温度推定値Tbは、ブラシ28の温度暫定値TZb(図7(a)参照)よりもブラシ28の温度の実測値に近い値となる。
【0076】
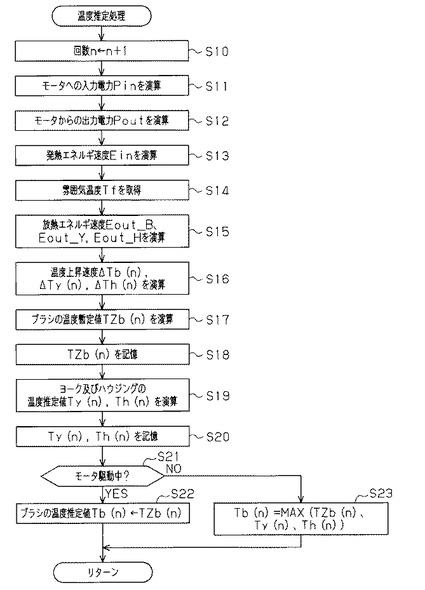
次に、モータ20のブラシ28、ヨーク21及びハウジング30の温度を推定するための温度推定処理ルーチンについて、図8に示すフローチャートを参照して説明する。この温度推定処理ルーチンは、予め設定された所定周期毎に実行される処理ルーチンである。なお、所定周期は、上記時間tsと一致している。
【0077】
さて、温度推定処理ルーチンにおいて、温度推定部53は、回数nを「1」だけインクリメントする(ステップS10)。続いて、温度推定部53は、上記関係式(式2)を用いてモータ20への入力電力Pinを演算し(ステップS11)、上記関係式(式3)を用いてモータ20からの出力電力Poutを演算する(ステップS12)。すなわち、ステップS11では、モータ20に流れる電流値Imとモータ20に印加される電圧値Vmとを乗算することにより、入力電力Pinが導き出される。また、ステップS12では、モータ20の回転数Nと駆動トルクTと定数(=0.14796)とを乗算することにより、出力電力Poutが導き出される。
【0078】
そして、温度推定部53は、ステップS11で演算した入力電力PinからステップS12で演算した出力電力Poutを減算してモータ20からの発熱エネルギ速度Ein(=Pin−Pout)を演算する(ステップS13)。続いて、温度推定部53は、モータ20の設置環境の雰囲気温度Tfを取得する(ステップS14)。
【0079】
そして、温度推定部53は、上記関係式(式4)を用い、ブラシ28からの放熱エネルギ速度Eout_B、ヨーク21からの放熱エネルギ速度Eout_Y及びハウジング30からの放熱エネルギ速度Eout_Hを演算する(ステップS15)。すなわち、ブラシ28の前回の温度暫定値TZb(n−1)から雰囲気温度Tfを減算し、該減算値(=(TZb(n−1)−Tf))をブラシ28の熱特性を示す熱係数Aで除算することにより、ブラシ28の放熱エネルギ速度Eout_Bが導き出される。また、ヨーク21の前回の温度推定値Ty(n−1)から雰囲気温度Tfを減算し、該減算値(=(Ty(n−1)−Tf))をヨーク21の熱特性を示す熱係数Aで除算することにより、ヨーク21の放熱エネルギ速度Eout_Yが導き出される。さらに、ハウジング30の前回の温度推定値Th(n−1)から雰囲気温度Tfを減算し、該減算値(=(Th(n−1)−Tf))をハウジング30の熱特性を示す熱係数Aで除算することにより、ハウジング30の放熱エネルギ速度Eout_Hが導き出される。
【0080】
続いて、温度推定部53は、上記関係式(式5)を用い、ブラシ28の温度上昇速度ΔTb(n)、ヨーク21の温度上昇速度ΔTy(n)及びハウジング30の温度上昇速度ΔTh(n)を演算する(ステップS16)。すなわち、モータ20の発熱エネルギ速度Einからブラシ28の放熱エネルギ速度Eout_Bを減算し、該減算値(=(Ein−Eout_B))にブラシ28用の係数Kを乗算することにより、ブラシ28の今回の温度上昇速度ΔTb(n)が導き出される。また、モータ20の発熱エネルギ速度Einからヨーク21の放熱エネルギ速度Eout_Yを減算し、該減算値(=(Ein−Eout_Y))にヨーク21用の係数Kを乗算することにより、ヨーク21の今回の温度上昇速度ΔTy(n)が導き出される。さらに、モータ20の発熱エネルギ速度Einからハウジング30の放熱エネルギ速度Eout_Hを減算し、該減算値(=(Ein−Eout_H))にハウジング30用の係数Kを乗算することにより、ハウジング30の今回の温度上昇速度ΔTy(n)が導き出される。
【0081】
ここで、対象部材の温度上昇速度を演算する場合に、対象部材の発熱エネルギ速度の代わりに、モータ20の発熱エネルギ速度Einを用いる理由について説明する。
ブレーキハイドロユニット12の主な発熱源は、モータ20である。このモータ20が駆動すると、該駆動に基づき発生した熱は、ブレーキハイドロユニット12を構成する各機器構成部材に伝達される。その結果、各機器構成部材の温度が上昇する。つまり、各機器構成部材の温度上昇は、モータ20の駆動に基づいた温度上昇である。そのため、各機器構成部材の温度上昇速度は、モータ20の駆動速度、即ちモータ20の発熱エネルギ速度Einとほぼ比例する。そのため、対象部材の発熱エネルギ速度を個別に取得しなくても、モータ20の発熱エネルギ速度Einを用いることにより、各機器構成部材の今回の温度上昇速度が導き出される。
【0082】
フローチャートの説明に戻り、温度推定部53は、上記関係式(式6)を用い、ブラシ28の今回の温度暫定値TZb(n)を演算する(ステップS17)。すなわち、ブラシ28の今回の温度上昇速度ΔTb(n)に時間tsを乗算し、所定周期での温度上昇量(=(ΔTb(n)・ts))に対してブラシ28の前回の温度暫定値TZb(n−1)を加算することにより、ブラシ28の今回の温度暫定値TZb(n)が導き出される。したがって、本実施形態では、ステップS17が、暫定値推定ステップに相当する。
【0083】
続いて、温度推定部53は、ステップS17で演算したブラシ28の今回の温度暫定値TZb(n)を温度暫定値記憶部68に記憶させる(ステップS18)。そして、温度推定部53は、上記関係式(式6)を用い、ヨーク21の今回の温度推定値Ty(n)及びハウジング30の今回の温度推定値Th(n)を演算する(ステップS19)。すなわち、ヨーク21の今回の温度上昇速度ΔTy(n)に時間tsを乗算し、所定周期での温度上昇量(=(ΔTy(n)・ts))に対してヨーク21の前回の温度推定値Ty(n−1)を加算することにより、ヨーク21の今回の温度推定値Ty(n)が導き出される。同様に、ハウジング30の今回の温度上昇速度ΔTh(n)に時間tsを乗算し、所定周期での温度上昇量(=(ΔTh(n)・ts))に対してハウジング30の前回の温度推定値Th(n−1)を加算することにより、ハウジング30の今回の温度推定値Th(n)が導き出される。したがって、本実施形態では、ステップS19が、温度取得ステップに相当する。
【0084】
続いて、温度推定部53は、ステップS19で演算したヨーク21の今回の温度推定値Ty(n)を温度推定値記憶部78に記憶させると共に、ハウジング30の今回の温度推定値Th(n)を温度推定値記憶部88に記憶させる(ステップS20)。そして、温度推定部53は、モータ20が駆動中であるか否かを判定する(ステップS21)。モータ20が駆動中である場合(ステップS21:YES)、温度推定部53は、ステップS17で演算したブラシ28の今回の温度暫定値TZb(n)を、ブラシ28の今回の温度推定値Tb(n)とする(ステップS22)。その後、温度推定部53は、温度推定処理ルーチンを一旦終了する。したがって、本実施形態では、ステップS22が、モータ駆動時推定値設定ステップに相当する。
【0085】
一方、モータ20が停止中である場合(ステップS21:NO)、温度推定部53は、ステップS17で演算したブラシ28の今回の温度暫定値TZb(n)、ステップS19で演算したヨーク21の今回の温度推定値Ty(n)及びハウジング30の今回の温度推定値Th(n)のうち最も高温となる値を、ブラシ28の今回の温度推定値Tb(n)とする(ステップS23)。その後、温度推定部53は、温度推定処理ルーチンを一旦終了する。したがって、本実施形態では、ステップS23が、モータ停止時推定値設定ステップに相当する。
【0086】
したがって、本実施形態では、以下に示す効果を得ることができる。
(1)モータ20の駆動停止後では、ブラシ28の温度は、ブラシ28の温度暫定値TZb(n)と、モータ20の駆動中ではブラシ28の温度暫定値TZb(n)よりも低温だったヨーク21及びハウジング30の温度推定値Ty(n),Th(n)とに基づき推定される。すなわち、ブラシ28の温度推定値Ty(n)は、ブラシ28の温度暫定値TZb(n)、ヨーク21及びハウジング30の温度推定値Ty(n),Th(n)のうち最高値とされる。これは、モータ20の駆動停止後では、ブラシ28は、該ブラシ28よりも熱容量の大きなヨーク21及びハウジング30よりも低温になる可能性が低いためである。このようにモータ20の駆動停止後においては、ブラシ28の周辺に位置する他の機器構成部材(ヨーク21、ハウジング30)の温度推定値を加味して、ブラシ28の温度推定値Tb(n)が取得される。したがって、モータ20の駆動停止後において、ブレーキハイドロユニット12を構成する機器構成部材の一つであるブラシ28の温度の推定精度を向上させることができる。
【0087】
(2)ハウジング30は、ブレーキハイドロユニット12を構成する複数の機器構成部材のうち最も熱容量の多い部材である。そのため、モータ20の駆動停止時では、ブラシ28の温度がハウジング30の温度を下回らない。そこで、本実施形態では、熱容量の最も多いハウジング30の温度推定値Thが取得される。そして、モータ20の駆動停止時では、ハウジング30の今回の温度推定値Th(n)を考慮しつつ、ブラシ28の今回の温度推定値Tb(n)が設定される。そのため、ブラシ28の温度の推定精度を向上させることができる。
【0088】
(3)モータ20の発熱エネルギ速度Einは、モータ20への入力電力Pinからモータ20からの出力電力Poutを減算することにより導き出される。また、ブラシ28からの放熱エネルギ速度Eout_Bは、ブラシ28の前回の温度暫定値TZb(n−1)から雰囲気温度Tfを減算した値を、ブラシ28の熱特性を示す熱係数Aで除算することにより取得される。放熱エネルギ速度Eout_Bの演算時にブラシ28の前回の温度暫定値TZb(n−1)と雰囲気温度Tfとの差分を利用する理由は、該差分の大小によって、ブラシ28からの単位時間あたりの放熱量が変動するためである。そのため、熱係数Aを適切な値に設定しておくことにより、ブラシ28からの放熱エネルギ速度Eout_Bの推定精度を向上させることができる。
【0089】
そして、このようにして演算されたモータ20の発熱エネルギ速度Einとブラシ28からの放熱エネルギ速度Eout_Bとに基づき、ブラシ28の温度上昇速度ΔTb(n)が取得される。その結果、ブラシ28の今回の温度暫定値TZb(n)の推定精度が向上する。そして、モータ20の駆動時には、演算した温度暫定値TZb(n)が、ブラシ28の温度推定値Tb(n)とされる。したがって、モータ20の駆動時でのブラシ28の温度の推定精度を向上させることができる。
【0090】
(4)もし仮に、モータ20の停止時におけるブラシ28の温度の推定精度が悪かったとすると、モータ20の駆動中におけるブラシ28の温度上昇速度ΔTb(n)を精度良く取得できても、モータ20の駆動中のブラシ28の温度を精度良く推定することはできない。これは、モータ20の駆動開始直前のブラシ28の温度推定値が実際の温度と乖離しているためである。この点、本実施形態では、モータ20の停止時でもブラシ28の温度が精度良く推定される分、モータ20の駆動中のブラシ28の温度を精度良く推定することができる。
【0091】
(5)モータ20の発熱エネルギ速度Einを演算する方法としては、モータ20に流れる電流値Imを2乗した値に所定の比例定数を乗算する方法も考えられる。この方法では、モータ20からのアウトプットを利用しない一方で、モータ20に対するインプット(即ち、電流値)を利用して、モータ20の発熱エネルギ速度Einが演算される。この場合、モータ20の駆動トルクが変動するような状況では、発熱エネルギ速度Einの推定精度にばらつきが生じるおそれがある。この点、本実施形態では、モータ20への入力電力Pinとモータ20からの出力電力Poutとを用いて、発熱エネルギ速度Einが演算される。つまり、本実施形態では、モータ20に対するインプットだけではなくモータ20からのアウトプットも利用して、モータ20の発熱エネルギ速度Einが演算される。したがって、モータ20の駆動トルクTに変動が生じる場合であっても、モータ20の発熱エネルギ速度Einが精度良く推定されるため、ブラシ28の温度の推定精度を向上させることができる。
【0092】
(6)特に、減速時に回生制動力を利用可能な車両においては、運転手によって要求される制動力(以下、「要求制動力」ともいう。)が、付与可能な回生制動力の最大値以下である場合には、ブレーキハイドロユニット12が駆動しない。その一方で、要求制動力が回生制動力の最大値を超える場合には、要求制動力と回生制動力との差分を補うようにブレーキハイドロユニット12が駆動する。しかも、このときのモータ20に要求される駆動トルクTは、要求制動力と回生制動力との差分の大きさによって変動する。こうした使用環境の元で駆動するブレーキハイドロユニット12を構成するブラシ28の温度が、本実施形態の温度推定方法で推定される。換言すると、本実施形態の温度推定方法では、モータ20の駆動態様がその時々によって変動するブレーキハイドロユニット12のブラシ28の温度の推定精度を向上させることができる。
【0093】
(7)ブラシ付きのモータ20では、ブラシ28がロータ24に摺動するため、該ブラシ28は高温になりやすい。こうしたブラシ28が温度上昇によって故障してしまうと、モータ20の故障にも繋がる。この点、本実施形態では、ブラシ28の温度が精度良く推定されるため、ブラシ28が高温になり過ぎる前に、モータ20の駆動を制限するような制限制御を、適切なタイミングで開始させることができる。
【0094】
(8)また、ブラシ28の温度が精度良く推定されるため、制限制御の開始タイミングを特定するための温度閾値を、比較的高い値に設定することができる。その結果、本来はモータ20を未だ駆動させていてもよいタイミングで、上記制限制御が開始されてしまうことを抑制できる。つまり、モータ20の連続駆動の許容時間を長くすることができる。
【0095】
(9)ヨーク21及びハウジング30の温度推定値Ty(n),Th(n)は、ブラシ28の温度暫定値TZb(n)の演算方法と同一方法で演算される。すなわち、ヨーク21及びハウジング30の温度推定値Ty(n),Th(n)を、専用の温度センサを用いることなく推定することができる。
【0096】
(10)ハウジング30内に収容される電磁弁31の中には、温度によって作動特性が変化するものもある。こうした電磁弁31の温度は、ハウジング30の温度変化に応じて変化する。そのため、ハウジング30において電磁弁31近傍の部位の温度を精度良く推定することができれば、該ハウジング30内に収容される電磁弁31の温度を推定することができる。この点、本実施形態では、ハウジング30において電磁弁31近傍の部位の温度が精度良く推定される。そのため、ハウジング30において電磁弁31近傍の部位の温度に応じて、電磁弁31に流す電流値を調整することにより、電磁弁31の温度変化に基づいた電磁弁31の作動態様のばらつきが抑制される。したがって、車輪11に対する制動力を適切に制御できる。
【0097】
(11)温度センサSE1は、回路基板41に設けられる制御装置50の温度を検出するためのセンサである。本実施形態では、こうした温度センサSE1を利用して、雰囲気温度Tfが取得される。そのため、モータ20付近の温度を検出するための温度センサを設けなくても、雰囲気温度Tfを適切に設定でき、ひいてはブラシ28、ヨーク21及びハウジング30の放熱エネルギ速度Eout_B,Eout_Y,Eout_Hの推定精度を向上させることができる。
【0098】
なお、実施形態は以下のような別の実施形態に変更してもよい。
・実施形態において、ブラシ28以外の他の機器構成部材の温度の推定方法は、上記の方法以外の他の任意の方法であってもよい。例えば、モータ20に流れる電流値Imを2乗した値に所定の比例定数を乗算してモータ20の発熱エネルギ速度Einを導出し、該発熱エネルギ速度Einを用いヨーク21及びハウジング30の温度推定値Ty(n),Th(n)を演算してもよい。
【0099】
・実施形態において、ブラシ28以外の他の機器構成部材の温度を検出するための温度センサを設け、該センサからの検出信号に基づき他の機器構成部材の温度を検出するようにしてもよい。この場合、モータ20の駆動停止後では、検出した他の機器構成部材の温度を用い、ブラシ28の温度を推定するようにしてもよい。
【0100】
・実施形態において、ヨーク21の温度推定値Ty(n)を取得しなくてもよい。この場合、モータ20の駆動停止後では、ブラシ28の温度暫定値TZb(n)及びハウジング30の温度推定値Th(n)のうち最大値に基づき、ブラシ28の温度推定値Tb(n)が設定される。
【0101】
・実施形態において、ヨーク21及びハウジング30以外の他の機器構成部材(例えば、エンドプレート22)の温度推定値を取得するようにしてもよい。ただし、温度を取得する機器構成部材は、対象部材であるブラシ28よりも熱容量の大きな部材であることが好ましい。そして、モータ20の駆動停止後では、エンドプレート22の温度推定値も利用しつつ、ブラシ28の温度推定値Tb(n)が設定される。
【0102】
・実施形態において、対象部材は、ブラシ28以外の他の機器構成部材(例えば、電機子コイル240b)であってもよい。ただし、対象部材は、ブレーキハイドロユニット12を構成する各機器構成部材のうち、最も熱容量の多い部材(この場合、ハウジング30)以外であることが好ましい。
【0103】
・モータ20の駆動停止後においては、ヨーク21の温度推定値Ty(n)を、該温度推定値Ty(n)及びハウジング30の温度推定値Th(n)のうち最も大きな値としてもよい。
【0104】
・実施形態において、対象部材の温度の推定方法は、上記の方法以外の他の任意の方法であってもよい。例えば、モータ20に流れる電流値Imを2乗した値に所定の比例定数を乗算してモータ20の発熱エネルギ速度Einを導出し、該発熱エネルギ速度Einを用い対象部材の温度暫定値を演算してもよい。
【0105】
・モータ20の駆動停止後において、温度暫定値TZb(n)が他の機器構成部材の温度未満になった場合には、該温度に所定の係数を乗算した値を、ブラシ28の温度推定値Tb(n)としてもよい。
【0106】
このとき、温度暫定値TZb(n)がヨーク21の温度推定値Ty(n)未満になった場合には、該温度推定値Ty(n)に所定の第1係数(1よりも大きな値であって、例えば「1.1」)を乗算した値を、ブラシ28の温度推定値Tb(n)としてもよい。その後、ヨーク21の温度推定値Ty(n)がハウジング30の温度推定値Th(n)未満になった場合には、該温度推定値Th(n)に所定の第2係数(1よりも大きな値であって、例えば「1.2」)を乗算した値を、ブラシ28の温度推定値Tb(n)としてもよい。この場合、第2係数は、第1係数よりも大きな値であることが好ましい。
【0107】
・実施形態において、車両のエンジンルーム内の温度を検出するための温度センサが、エンジンルーム内に設置されている場合、雰囲気温度演算部64は、該温度センサからの検出信号に基づきブレーキハイドロユニット12付近の雰囲気温度Tfを検出してもよい。
【0108】
また、雰囲気温度Tfは、車両のイグニッションスイッチがオンになった直後に取得された温度としてもよい。このときの雰囲気温度Tfは、予め設定された温度であってもよい。
【0109】
・実施形態において、温度推定処理ルーチンは、車両のイグニッションスイッチがオフになっても継続させてよい。この場合、ブラシ28の温度推定値Tb(n)が雰囲気温度Tfと一致するようになった場合に、温度推定処理ルーチンを終了させてもよい。
【0110】
・実施形態において、モータ20の出力軸241近傍に回転数検出用のセンサ(例えば、ロータリーエンコーダ)を設け、該センサからの検出信号に基づきモータ20の回転数Nを検出してもよい。この場合には、回転数検出用のセンサからの出力を用いて、モータ20の駆動トルクTを検出してもよい。
【0111】
・実施形態において、トルク検出センサをモータ20に設け、該センサからの検出信号に基づきモータ20の駆動トルクTを検出してもよい。
・実施形態において、電子機器に搭載されるモータは、ブラシレスのモータであってもよい。すなわち、モータは、ステッピングモータ及びボイスコイルモータなどであってもよい。
【0112】
・本発明の電子機器を、車載の電子機器であれば、ブレーキハイドロユニット以外の他の機器に具体化してもよい。例えば、電子機器を、電動パワーステアリング装置に具体化してもよいし、電動パーキングブレーキ装置に具体化してもよい。
【0113】
・本発明の電子機器を、洗濯機や食器洗浄機などの家庭用電子機器に具体化してもよい。
次に、上記実施形態及び別の実施形態から把握できる技術的思想を以下に追記する。
【0114】
(イ)前記温度取得手段(70、S19)は、前記モータ(20)のヨーク(21)の温度(Ty(n))を、前記他の機器構成部材の温度として取得することを特徴とするに記載の温度推定装置。
【0115】
(ロ)前記電子機器(12)は、前記モータ(20)を駆動源とする駆動部(32)が収容されるハウジング(30)をさらに備え、前記モータ(20)は、そのヨーク(21)を介して取り付けられる前記ハウジング(30)に取り付けられており、
前記温度取得手段(80、S19)は、前記ハウジング(30)の温度(Th(n))を、前記他の機器構成部材の温度として取得することを特徴とする温度推定装置。
【0116】
ハウジング内には、制御装置などによって制御される電磁弁などの制御対象が収容されている。こうした制御対象の作動特性は、自身の温度によって多少変化する。そのため、制御対象の温度を正確に推定できれば、制御対象を、より適切に制御することができる。そのため、ハウジングの温度を正確に推定できれば、該推定結果に基づいた制御対象の制御を行うことにより、該制御対象を、より適切に作動させることができる。この点、本発明では、ハウジングの温度が精度良く推定される。その結果、このハウジングの温度推定値に基づいた制御対象の制御を行うことにより、該電磁弁を、より適切に作動させることができる。
【0117】
(ハ)前記電子機器(12)は、車両に搭載される車輪(11)に対する制動力を調整するものであり、
前記ハウジング(30)内には、前記車輪(11)に対する制動力を調整すべく作動する電磁弁(31)が設けられていることを特徴とする温度推定装置。
【0118】
上記構成によれば、ハウジングの温度を精度良く推定し、該推定結果に基づいた電磁弁の制御を行うことにより、該電磁弁を、より適切に作動させることができる。すなわち、車輪に対する制動力を、適切に調整することができる。
【符号の説明】
【0119】
11…車輪、12…電子機器の一例としてのブレーキハイドロユニット。20…モータ、21…機器構成部材及び対象部材の一例としてのヨーク、22…機器構成部材及び対象部材の一例としてのエンドプレート、240a…機器構成部材及び対象部材の一例としてのコア、240b…機器構成部材及び対象部材の一例としての電機子コイル、241…機器構成部材及び対象部材の一例としての出力軸、242…機器構成部材及び対象部材の一例としての整流子、25…機器構成部材及び対象部材の一例としての磁石、26…機器構成部材及び対象部材の一例としての軸受、28…機器構成部材及び対象部材の一例としてのブラシ、29A…機器構成部材及び対象部材の一例としての付勢部材、30…機器構成部材及び対象部材の一例としてのハウジング、31…電磁弁、32…駆動部の一例としてのポンプ、53…温度推定装置の一例としての温度推定部、60…暫定値推定手段の一例としてのブラシ温度暫定値演算部、63…発熱量演算手段の一例としての発熱エネルギ演算部、65…放熱量演算手段の一例としての放熱エネルギ演算部、66…暫定値演算手段を構成する温度上昇量演算部、67…暫定値演算手段を構成する温度暫定値演算部、70…温度取得手段の一例としてのヨーク温度推定値演算部、73,83…発熱量演算手段の一例としての発熱エネルギ演算部、75,85…放熱量演算手段の一例としての放熱エネルギ演算部、76,86…推定値演算手段を構成する温度上昇量演算部、77,87…推定値演算手段を構成する温度推定値演算部、80…温度取得手段の一例としてのハウジング温度推定値演算部、90…推定値設定手段の一例としてのブラシ温度推定値特定部、A…熱係数、Ein…発熱量の一例としての発熱エネルギ速度、Eout,Eout_B,Eout_Y,Eout_H…放熱量の一例としての放熱エネルギ速度、Pin…入力エネルギ相当値の一例としての入力電力、Pout…出力エネルギ相当値の一例としての出力電力、Tf…雰囲気温度、Tb(n)…対象部材の今回の温度推定値、Tb(n−1)…対象部材の前回の温度推定値、Ty(n),Th(n)…他の機器構成部材の今回の温度推定値、Ty(n−1),Th(n−1)…他の機器構成部材の前回の温度推定値、TZb(n)…対象部材の今回の温度暫定値、TZb(n−1)…対象部材の前回の温度暫定値、ΔTb(n)…対象部材の温度上昇速度、ΔTy(n),ΔTh(n)…他の機器構成部材の温度上昇速度。
【技術分野】
【0001】
本発明は、モータを備える電子機器の構成部材の温度を推定する温度推定装置及び温度推定方法に関する。
【背景技術】
【0002】
従来、モータを備える電子機器として、例えば特許文献1に記載される電動パワーステアリング装置が提案されている。この特許文献1には、モータの温度を検出するためのセンサを用いることなく、モータの温度上昇量の推定値を演算する方法が開示されている。具体的には、以下に示す関係式(式1)に基づきモータの温度上昇量の推定値(Δθ)が演算される。そして、このように演算された温度上昇量の推定値(Δθ)をモータの駆動開始前の温度に対して加算することにより、モータの温度推定値が取得される。
【0003】
【数1】
ただし、Δθ…温度上昇量の推定値、HTA…モータの駆動時における損失電力、TRS…モータの熱抵抗、t…モータの駆動時間、T…モータの熱時定数
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−34283号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一般に、モータの温度を推定する場合には、モータに設けられたブラシの温度が推定される。これは、ブラシが過熱状態になると、ブラシの故障に起因したモータの故障に繋がるためである。
【0006】
ところで、モータの駆動時では、ブラシに代表される対象部材の温度上昇量の推定値は、関係式(式1)を用いて演算される。しかし、モータの駆動停止後においては、関係式(式1)を用いた演算では、損失電力(HTA)が「0(零)」となる。すなわち、特許文献1には、モータの駆動停止後における温度変化量を推定する方法が開示されていない。
【0007】
そこで、近年では、対象部材での発熱量と対象部材からの放熱量とを推定し、該発熱量と放熱量との差分に基づき対象部材の温度変化量を推定する方法が考えられている。この方法では、モータの駆動停止時でも、対象部材の温度変化量を推定可能である。一般的に、対象部材からの放熱量は、モータの設置環境の雰囲気温度を考慮して推定される。
【0008】
しかしながら、対象部材からの放熱量は、対象部材の周辺の雰囲気温度だけではなく、対象部材の周辺に位置する周辺部材(例えば、ヨーク)の温度などによっても変動する。そのため、対象部材の周辺に位置する周辺部材の温度も考慮しつつ対象部材からの放熱量を推定しないと、モータの駆動停止後において対象部材の温度が精度良く推定されないおそれがある。
【0009】
本発明は、このような事情に鑑みてなされたものである。その目的は、モータの駆動停止後において、モータを備える電子機器を構成する機器構成部材の温度の推定精度を向上させることができる温度推定装置及び温度推定方法を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明は、モータ(20)を備える電子機器(12)を構成する機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち対象部材(28)の温度を、予め設定された周期毎に推定する温度推定装置であって、前記対象部材(28)の温度暫定値(TZb(n))を推定する暫定値推定手段(60、S17)と、前記機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち前記対象部材(28)以外の他の機器構成部材(21,30)の温度(Ty(n),Th(n))を取得する温度取得手段(70,80、S19)と、前記対象部材(28)の温度推定値(Tb(n))を設定する推定値設定手段(90、S22,S23)と、を備え、前記推定値設定手段(90、S22,S23)は、前記モータ(20)の駆動時には、前記暫定値推定手段(60、S17)によって推定された前記対象部材(28)の今回の温度暫定値(TZb(n))を、前記対象部材(28)の今回の温度推定値(Tb(n))とし、前記モータ(20)の駆動停止後には、前記モータ(20)の駆動中では前記対象部材(28)の温度暫定値(TZb(n))よりも低温であった特定の機器構成部材(21,30)の今回の温度(Ty(n),Th(n))と、前記対象部材の今回の温度暫定値(TZb(n))とのうち最も高温となる値に基づき前記対象部材(28)の今回の温度推定値(Tb(n))を設定することを要旨とする。
【0011】
モータの駆動が停止した場合には、対象部材を含む各機器構成部材の温度は低くなっていく。このとき、対象部材からの放熱量は、該対象部材の周辺に位置する他の機器構成部材の温度に応じた量になる。すなわち、対象部材のほうが特定の機器構成部材よりも高温である場合、対象部材からの放熱量は、温度差が小さいほど少なくなる。そして、対象部材の温度が特定の機器構成部材の温度と同程度となると、モータの駆動時には特定の機器構成部材よりも高温であった対象部材の温度は、特定の機器構成部材の温度よりも下回らない。
【0012】
そこで、本発明では、対象部材の温度暫定値は、該対象部材の周辺に位置する他の機器構成部材の温度とは関係なく推定される。そして、モータの駆動停止後においては、対象部材の温度暫定値と特定の機器構成部材の温度とのうち最も高温となる値に基づき、対象部材の今回の温度推定値が設定される。すなわち、モータの駆動停止後においては、対象部材の周辺に位置する他の機器構成部材の温度を加味して、対象部材の温度推定値が取得される。そのため、モータの駆動停止後において、モータを備える電子機器を構成する機器構成部材の温度の推定精度を向上させることができる。
【0013】
本発明の温度推定装置において、前記暫定値推定手段(60、S13,S15,S16,S17)は、前記モータ(20)に入力される入力エネルギに相当する入力エネルギ相当値(Pin)と前記モータ(20)から出力される出力エネルギに相当する出力エネルギ相当値(Pout)との差分に基づき、前記モータ(20)の発熱量(Ein)を演算する発熱量演算手段(63、S13)と、前記対象部材(28)の前回の温度暫定値(TZb(n−1))と前記電子機器(12)の設置環境の雰囲気温度(Tf)との差分と、前記対象部材(28)の熱特性を示す熱係数(A)とに基づき、前記対象部材(28)からの放熱量(Eout_B)を演算する放熱量演算手段(65、S15)と、前記各演算手段(63,65、S13、S15)によって演算された発熱量(Ein)と放熱量(Eout_B)との差分とに基づき前記対象部材(28)の温度上昇量(ΔTb(n))を取得し、該温度上昇量(ΔTb(n))と前記対象部材の前回の温度暫定値(TZb(n))とに基づき前記対象部材の今回の温度暫定値(TZb(n))を演算する暫定値演算手段(67、S16,S17)と、を有することが好ましい。
【0014】
上記構成によれば、モータの発熱量は、モータに入力される入力エネルギに相当する入力エネルギ相当値とモータから出力される出力エネルギに相当する出力エネルギ相当値とを用いて演算される。また、対象部材からの放熱量は、対象部材の前回の温度暫定値と雰囲気温度との差分を、対象部材の熱特性を示す熱係数で除算することにより取得される。この熱係数を、実験やシミュレーションなどによって予め設定しておくことにより、放熱量の推定精度を向上させることができる。そして、このようにして演算されたモータの発熱量と対象部材からの放熱量との差分に基づき、前回のタイミングと今回のタイミングとの間での対象部材の温度上昇量が取得される。したがって、モータの駆動時においては、精度の良い温度上昇量を用いることにより、対象部材の温度の推定精度を向上させることができる。
【0015】
本発明の温度推定装置において、前記モータ(20)は、ブラシ付きのモータであり、前記暫定値推定手段(60、S17)は、前記モータ(20)のブラシ(28)の温度暫定値(TZb(n))を、前記対象部材の温度暫定値として推定し、前記推定値設定手段(90、S22,S23)は、前記モータ(20)の駆動停止後には、前記温度取得手段(70,80、S19)によって取得された前記特定の機器構成部材(21,30)の今回の温度(Ty(n),Th(n))と、前記暫定値推定手段(60、S17)によって推定された前記ブラシ(28)の今回の温度暫定値(TZb(n))とのうち最も高温となる値に基づき前記ブラシ(28)の今回の温度推定値(Tb(n))を設定することが好ましい。
【0016】
ブラシ付きのモータでは、ブラシが摺動するため、該ブラシは高温になりやすい。こうしたブラシが温度上昇によって故障してしまうと、モータの故障にも繋がる。そのため、ブラシの温度を精度良く推定する必要がある。この点、本発明では、ブラシの温度が、精度良く推定される。そのため、ブラシが高温になり過ぎる前に、モータの駆動を制限するような制限制御を、適切なタイミングで開始させることができる。
【0017】
本発明の温度推定装置において、前記温度取得手段(70,80、S19)は、前記対象部材(28)よりも熱容量の多い他の機器構成部材(21,30)の温度(Ty(n),Th(n))を取得することが好ましい。
【0018】
モータの駆動時には、熱容量の多い部材ほど温度上昇しにくく、モータの駆動停止後には、熱容量の多い部材ほど温度低下しにくい。そのため、モータの駆動時には、対象部材の方が、該対象部材よりも熱容量の多い特定の機器構成部材よりも高温となりやすい。また、モータの駆動停止後には、対象部材の温度変化速度が、該対象部材よりも熱容量の多い特定の機器構成部材の温度変化速度よりも速くなりやすい。しかし、対象部材の温度は、特定の機器構成部材の温度に近づくと、該特定の機器構成部材の温度と同じような変化を示すようになる。
【0019】
そこで、本発明では、モータの駆動停止後においては、対象部材の温度暫定値が特定の機器構成部材の温度推定値未満となった場合に、対象部材の温度推定値は、特定の機器構成部材の温度推定値に基づいた値に設定される。このように他の機器構成部材の温度を加味して対象部材の温度を推定することにより、その推定精度を向上させることができる。
【0020】
本発明の温度推定装置において、前記温度取得手段(70,80、S13,S15,S16,S19)は、前記モータ(20)に入力される入力エネルギに相当する入力エネルギ相当値(Pin)と前記モータ(20)から出力される出力エネルギに相当する出力エネルギ相当値(Pout)との差分に基づき、前記モータ(20)の発熱量(Ein)を演算する発熱量演算手段(73,83、S13)と、前記他の機器構成部材(21,30)の前回の温度推定値(Ty(n−1),Th(n−1))と前記電子機器(12)の設置環境の雰囲気温度(Tf)との差分と、前記他の機器構成部材(21,30)の熱特性に基づく熱係数(A)とに基づき、前記他の機器構成部材(21,30)からの放熱量(Eout_Y,Eout_H)を演算する放熱量演算手段(75,85、S15)と、前記各演算手段(73,75,83,85、S13,S15)によって演算された発熱量(Ein)と放熱量(Eout_Y,Eout_H)との差分とに基づき前記他の機器構成部材(21,30)の温度上昇量(ΔTy(n),ΔTh(n))を取得し、該温度上昇量(ΔTy(n),ΔTh(n))と前記他の機器構成部材(21,30)の前回の温度推定値(Ty(n−1),Th(n−1))とに基づき前記他の機器構成部材(21,30)の今回の温度推定値(Ty(n),Th(n))を演算する推定値演算手段(77,87、S16,S19)と、を有するが好ましい。
【0021】
上記構成によれば、対象部材以外の他の機器構成部材の温度を、専用の温度センサを用いることなく推定することができる。
本発明は、モータ(20)を備える電子機器(12)を構成する機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち対象部材(28)の温度を、予め設定された周期毎に推定させるための温度推定方法であって、前記対象部材(28)の温度暫定値(TZb(n))を推定させる暫定値推定ステップ(S17)と、前記機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち前記対象部材(28)以外の他の機器構成部材(21,30)の温度(Ty(n),Th(n))を取得させる温度取得ステップ(S19)と、前記モータ(20)の駆動時に、前記暫定値推定ステップ(S17)で推定した前記対象部材(28)の温度暫定値(TZb(n))を、前記対象部材(28)の今回の温度推定値(Tb(n))とさせるモータ駆動時推定値設定ステップ(S22)と、前記モータ(20)の駆動停止後に、前記モータ(20)の駆動中には前記対象部材の温度暫定値(TZb(n))よりも低温であった特定の機器構成部材(21,30)の今回の温度(Ty(n),Th(n))と、前記対象部材(28)の今回の温度暫定値(TZb(n))とのうち最も高温となる値に基づき前記対象部材(28)の今回の温度推定値(Tb(n))を設定させるモータ停止時推定値設定ステップ(S23)と、を有することを要旨とする。
【0022】
上記構成によれば、上記温度推定装置と同等の作用・効果を得ることができる。
なお、本発明をわかりやすく説明するために実施形態を示す図面の符号に対応づけて説明したが、本発明が実施形態に限定されるものではないことは言うまでもない。
【図面の簡単な説明】
【0023】
【図1】本発明の温度推定装置を備える電子機器の一実施形態であるブレーキハイドロユニットを説明する断面図。
【図2】ブレーキハイドロユニットの概略構成を説明するブロック図。
【図3】温度推定部の機能を詳細に説明するブロック図。
【図4】機器構成部材の発熱エネルギ速度と温度上昇量との関係を示すグラフ。
【図5】ブラシの温度暫定値、ヨークの温度推定値及びハウジングの温度推定値の変化を示すグラフ。
【図6】(a)はモータの停止後でも温度暫定値をブラシの温度推定値とした場合の温度推定値と温度の実測値との比較を示すグラフ、(b)はモータの停止後ではブラシの温度推定値をヨーク及びハウジングの温度推定値を考慮して設定した場合の温度推定値と温度の実測値との比較を示すグラフ。
【図7】(a)はモータの停止後でも温度暫定値をブラシの温度推定値とした場合の温度推定値と温度の実測値との比較を示すグラフ、(b)はモータの停止後ではブラシの温度推定値をヨーク及びハウジングの温度推定値を考慮して設定した場合の温度推定値と温度の実測値との比較を示すグラフ。
【図8】本実施形態における温度推定処理ルーチンを説明するフローチャート。
【発明を実施するための形態】
【0024】
以下、本発明を具体化した一実施形態を図1〜図8に従って説明する。
図1及び図2に示すように、本実施形態の電子機器は、車両に搭載される車輪11に対する制動力を調整すべく駆動するブレーキハイドロユニット12である。このブレーキハイドロユニット12は、モータ20と、該モータ20が取り付けられる略直方体状のハウジング(機器構成部材)30と、該ハウジング30においてモータ20の取り付け位置とは異なる位置(本実施形態では、反対側の位置)に固定される収容ケース40とを備えている。
【0025】
本実施形態のモータ20は、ブラシ付きの直流モータである。こうしたモータ20は、ハウジング30側に開口する有底略円筒状のヨーク(機器構成部材)21と、ヨーク21の開口部を閉塞する板状のエンドプレート(機器構成部材)22と、ヨーク21及びエンドプレート22によって形成された内部空間23に配置されるロータ24とを備えている。ヨーク21は、内部空間23で発生する磁気の外部への漏れを抑制する金属で構成されている。こうしたヨーク21の内周面には、周方向に沿って等間隔に複数の磁石(機器構成部材)25が固定されている。また、ヨーク21の底部の略中央には、軸受(機器構成部材)26が収容される軸受保持部210が一体的に形成されている。こうしたヨーク21は、複数(図1では2つのみ図示)のボルト27によってハウジング30に固定される。つまり、モータ20は、ヨーク21を介してハウジング30に取り付けられる。
【0026】
エンドプレート22は、合成樹脂によって構成されている。こうしたエンドプレート22の中央には、板厚方向に貫く貫通孔220が形成されている。また、エンドプレート22には、ロータ24に摺接する複数のブラシ(機器構成部材)28を保持するブラシホルダ29が一体的に形成されている。このブラシホルダ29は、ブラシ28の径方向外側に配置される付勢部材(機器構成部材)29Aを介して対象部材の一例としてのブラシ28を保持している。すなわち、ブラシ28は、付勢部材29Aによって径方向内側に付勢されている。
【0027】
ロータ24の電機子240は、ヨーク21に固定された磁石25に対向して配置されている。こうした電機子240は、コア(機器構成部材)240aと、該コア240aに巻回された複数の電機子コイル(機器構成部材)240bとを有している。ロータ24の出力軸(機器構成部材)241は、軸受保持部210内に収容された軸受26を介して回転自在な状態でヨーク21に支持されている。こうした出力軸241に、電機子240が固定されている。また、出力軸241は、エンドプレート22に形成された貫通孔220を貫いてハウジング30内に突出している。ロータ24の整流子(機器構成部材)242は、出力軸241において電機子240よりもハウジング30側の部分に固定されている。こうした整流子242の外周には、電機子コイル240bに電気的に接続された複数の整流子片242aが周方向に沿って等間隔で配設されている。
【0028】
各ブラシ28は、整流子242の径方向外側に配置されている。こうした各ブラシ28は、整流子242の整流子片242aに摺接している。そして、ブラシ28からは、整流子片242aを介して電機子コイル240bに電流が供給される。
【0029】
ハウジング30は、重量及び剛性の観点で優れた材料(例えば、アルミニウムなどの金属)で構成されている。こうしたハウジング30内には、車輪11に対する制動力を調整するための各種電磁弁31及びモータ20を駆動源とする駆動部の一例としてのポンプ32などが収容されている。そして、各種電磁弁31及びポンプ32の作動によって、車両の車輪11に設けられたホイールシリンダ33内の液圧が調整される。その結果、車輪11には、ホイールシリンダ33の液圧に応じた制動力が付与される。
【0030】
収容ケース40内には、回路基板41が収容されている。この回路基板41には、図2に示すように、CPU、ROM及びRAMなどで構成される制御装置50と、回路基板41の温度を検出するための温度センサSE1と、電磁弁31やモータ20を駆動させるための各種ドライバー回路(図示略)となどが設けられている。
【0031】
次に、本実施形態の制御装置50について図2、図3及び図4を参照して説明する。
図2に示すように、制御装置50は、ソフトウエアによって構築される機能部として、モータ20の制御を司るモータ制御部51、各種電磁弁31の制御を司る電磁弁制御部52及び温度推定装置の一例としての温度推定部53を備えている。
【0032】
モータ制御部51には、モータ20に流れる電流値を検出するための電流センサ(図示略)と、モータ20に印加される電圧値を検出するための電圧センサ(図示略)とが電気的に接続されている。そして、モータ制御部51は、各センサからの検出信号に基づき、モータ20に流れる電流値Imと、モータ20に印加される電圧値Vmとを取得する。そして、モータ制御部51は、取得した電流値Im及び電圧値Vmを特定するための入力情報を温度推定部53に出力する。
【0033】
また、モータ制御部51には、温度推定部53によって演算されたモータ20のブラシ28の温度推定値Tb(n)を特定するための温度情報が入力される。そして、モータ制御部51は、入力された温度情報で特定される温度推定値Tb(n)が、モータ20が過熱状態であるか否かを判断するために予め設定された温度閾値以上であるか否かを判定する。モータ制御部51は、温度推定値Tb(n)が温度閾値未満である場合にはモータ20の制御を継続する一方、温度推定値Tb(n)が温度閾値以上である場合にはモータ20の駆動を制限する制限制御を行う。なお、制限制御としては、例えば、一定期間の間、モータ20の駆動を禁止する制御、規定速度以上でのモータ20の駆動を規制する制御などが挙げられる。
【0034】
電磁弁制御部52には、温度推定部53によって演算されたハウジング30の温度推定値Th(n)を特定するための温度情報が入力される。そして、電磁弁制御部52は、入力された温度情報で特定されるハウジング30の温度推定値Th(n)に基づき、電磁弁31に流す電流値を設定する。すなわち、電磁弁31に流す電流値は、ハウジング30の温度推定値Th(n)によって補正される。
【0035】
温度推定部53は、ブレーキハイドロユニット12を構成する複数の機器構成部材の温度を推定する。具体的には、温度推定部53は、モータ20のブラシ(対象部材)28と、モータ20を構成する部材のうちブラシ28以外の他の機器構成部材の一例としてのヨーク21及びハウジング30の温度を推定する。こうした温度推定部53は、機能部として、暫定値推定手段の一例としてのブラシ温度暫定値演算部60と、温度取得手段の一例としてのヨーク温度推定値演算部70と、温度取得手段の一例としてのハウジング温度推定値演算部80と、推定値設定手段の一例としてのブラシ温度推定値特定部90とを有している。なお、ヨーク21及びハウジング30の熱容量は、ブラシ28の熱容量よりも多い。つまり、本実施形態では、ヨーク21及びハウジング30が、特定の機器構成部材に該当する。
【0036】
まず、ブラシ温度暫定値演算部60について説明する。
ブラシ温度暫定値演算部60は、モータ20での発熱量及びブラシ28からの放熱量などを考慮し、ブラシ28の温度暫定値TZb(n)を演算する。こうしたブラシ温度暫定値演算部60は、図3に示すように、機能部として、入力電力演算部61、出力電力演算部62、発熱エネルギ演算部63、雰囲気温度演算部64、放熱エネルギ演算部65、温度上昇量演算部66、温度暫定値演算部67及び温度暫定値記憶部68を有している。
【0037】
入力電力演算部61は、モータ20に入力される入力エネルギに相当する入力エネルギ相当値の一例として、モータ20に入力される入力電力Pinを演算する。具体的には、入力電力演算部61は、モータ制御部51からの入力情報で特定される電流値Im及び電圧値Vmを下記の関係式(式2)に代入することにより、入力電力Pinを演算する。そして、入力電力演算部61は、演算した入力電力Pinを発熱エネルギ演算部63に出力する。
【0038】
【数2】
出力電力演算部62は、モータ20から出力される出力エネルギに相当する出力エネルギ相当値の一例として、モータ20から出力される出力電力Poutを演算する。具体的には、出力電力演算部62は、モータ制御部51からの入力情報で特定される電流値Imに含まれるリップル(即ち、周期的な変動)の周期等に基づき、モータ20の回転数N及び駆動トルクTを推定する。続いて、出力電力演算部62は、モータ20の出力軸241の回転数N及びモータ20の駆動トルクTを下記の関係式(式3)に代入することにより、出力電力Poutを演算する。そして、出力電力演算部62は、演算した出力電力Poutを発熱エネルギ演算部63に出力する。
【0039】
【数3】
発熱エネルギ演算部63は、モータ20の単位時間あたりの発熱量である発熱エネルギ速度Einを演算する。この発熱エネルギ速度Einの単位は、「J/s(ジュール/秒)」である。具体的には、発熱エネルギ演算部63は、入力電力演算部61で演算された入力電力Pinから出力電力演算部62で演算された出力電力Poutを減算し、該減算結果(=Pin−Pout)をモータ20の発熱エネルギ速度Einとする。本実施形態では、モータ20の単位時間あたりの発熱量のことを、単位が「J(ジュール)」を「時間(秒)」で除算した値であることを明確にするために「発熱エネルギ速度」と称する。そして、発熱エネルギ演算部63は、演算した発熱エネルギ速度Einを温度上昇量演算部66に出力する。したがって、本実施形態では、発熱エネルギ演算部63が、入力電力Pinと出力電力Poutとの差分(=Pin−Pout)に基づき、モータ20の発熱エネルギ速度Einを演算する発熱量演算手段として機能する。
【0040】
雰囲気温度演算部64は、回路基板41に設けられた温度センサSE1からの検出信号に基づき、収容ケース40内の温度を検出すると共に、該収容ケース40内の温度に基づきモータ20の設置環境の雰囲気温度Tfを推定する。例えば、雰囲気温度演算部64は、検出した収容ケース40内の温度に予め設定されたオフセット値を加算し、該値を雰囲気温度Tfとする。オフセット値は、収容ケース40内とモータ20の周辺との温度差に相当する値であって、実験やシミュレーションなどによって設定される。そして、雰囲気温度演算部64は、演算した雰囲気温度Tfを放熱エネルギ演算部65に出力する。
【0041】
放熱エネルギ演算部65は、モータ20から放出される単位時間あたりの放熱量である放熱エネルギ速度Eout(Eout_B)を演算する。この放熱エネルギ速度Eoutの単位は、「J/s(ジュール/秒)」である。具体的には、放熱エネルギ演算部65は、前回のタイミングで演算したブラシ28の温度暫定値TZb(n−1)を温度暫定値記憶部68から読み出す。そして、放熱エネルギ演算部65は、ブラシ28の前回の温度暫定値TZb(n−1)、雰囲気温度演算部64によって演算された雰囲気温度Tf及びブラシ28の熱特性を示す熱係数Aを下記の関係式(式3)に代入することにより、モータ20からの放熱エネルギ速度Eout_Bを演算する。続いて、放熱エネルギ演算部65は、演算したブラシ28からの放熱エネルギ速度Eout_Bを温度上昇量演算部66に出力する。したがって、本実施形態では、放熱エネルギ演算部65が、ブラシ28の前回の温度暫定値TZb(n−1)と雰囲気温度Tfとの差分と、ブラシ28の熱特性を示す熱係数Aとに基づき、ブラシ28からの放熱エネルギ速度Eout_Bを演算する放熱量演算手段として機能する。本実施形態では、対象部材から放出される単位時間あたりの放熱量のことを、単位が「J(ジュール)」を「時間(秒)」で除算した値であることを明確にするために「放熱エネルギ速度」と称する。
【0042】
【数4】
ここで、ブラシ28、ヨーク21及びハウジング30などの機器構成部材の熱特性を示す熱係数Aについて、図4を参照して説明する。熱係数Aとは、図4に示す対象部材に伝達された発熱エネルギ速度と、対象部材の温度上昇量の増加量との関係(図4における各直線の傾き)を示す係数である。
【0043】
図4に示すグラフは、以下に説明するようにして作成される。
まず始めに、規定の温度雰囲気(例えば、30℃)の基で、機器構成部材に温度センサを取り付けると共に、モータ20の回転数N及び駆動トルクTを計測できる状態にしてモータ20が駆動される。このとき、モータ20には、所定の電流値Im、電圧値Vmが与えられる。こうしたモータ20の駆動により、発熱エネルギ速度のほうが放熱エネルギ速度よりも大きい間では、機器構成部材の温度が上昇する。しかし、機器構成部材の温度が上昇すると、次第に放熱エネルギ速度が大きくなり、機器構成部材の温度上昇速度が低下する。そして、発熱エネルギ速度と放熱エネルギ速度とが釣り合うようになると、機器構成部材の温度が変化しない状態になる。その後、モータ20に与えられる電流値Im、電圧値Vmを上記関係式(式2)に代入することにより、モータ20に対する入力電力Pinが演算され、上記関係式(式3)に基づき、モータ20からの出力電力Poutが演算され、さらに、温度センサからの検出信号に基づき機器構成部材の温度が検出される。
【0044】
そして、機器構成部材の温度が変化しない状態になってから演算された入力電力Pinから出力電力Poutを減算することにより、モータ20の発熱エネルギ速度Einが演算される。このように演算されたモータ20の発熱エネルギ速度Einと、モータ20の駆動を開始させてからの機器構成部材の温度上昇量とが計測結果として取得される。こうした計測結果は、モータ20に対する入力電力Pinを変更して複数取得される。そして、取得された複数の計測結果をプロットすることにより、図4に示すグラフが作成される。
【0045】
なお、機器構成部材の温度が変化しない状態とは、モータ20の発熱エネルギ速度Einと機器構成部材からの放熱エネルギ速度Eoutとが釣り合っている状態である。そのため、機器構成部材の温度が変化しない状態で演算された入力電力Pin及び出力電力Poutに基づいたモータ20の発熱エネルギ速度Einは、この時点での機器構成部材からの放熱エネルギ速度Eoutと言い換えてもよい。つまり、図4に示すグラフは、機器構成部材からの放熱エネルギ速度Eoutと機器構成部材の温度上昇量との関係を説明するグラフでもある。
【0046】
図4からも明らかなように、機器構成部材の一例であるブラシ28の温度上昇量は、モータ20の発熱エネルギ速度Einの値が大きいほど多い。しかも、ブラシ28の温度上昇量と発熱エネルギ速度Einとの間には、比例関係がある。つまり、ブラシ28の温度上昇量と発熱エネルギ速度Einとの関係は、一次関数で示すことができる。図4では、温度上昇量と発熱エネルギ速度Einとの関係を示す一次関数は、第1の直線S1で示されている。そして、この第1の直線S1を示す式の傾きが、ブラシ28の熱係数Aに相当する。
【0047】
同様に、機器構成部材の一例であるヨーク21の温度上昇量とモータ20の発熱エネルギ速度Einとの間には、比例関係がある。つまり、ヨーク21の温度上昇量と発熱エネルギ速度Einとの関係は、一次関数で示される。図4では、ヨーク21の温度上昇量と発熱エネルギ速度Einとの関係を示す一次関数は、第2の直線S2で示されている。そして、この第2の直線S2を示す式の傾きが、ヨーク21の熱係数Aに相当する。
【0048】
同様に、機器構成部材の一例であるハウジング30の温度上昇量とモータ20の発熱エネルギ速度Einとの間には、比例関係がある。つまり、ハウジング30の温度上昇量と発熱エネルギ速度Einとの関係は、一次関数で示される。図4では、ハウジング30の温度上昇量と発熱エネルギ速度Einとの関係を示す一次関数は、第3の直線S3で示されている。そして、この第3の直線S3を示す式の傾きが、ハウジング30の熱係数Aに相当する。
【0049】
本実施形態では、ブラシ28、ヨーク21及びハウジング30のうち、ブラシ28の熱係数Aが最も大きく、ヨーク21の熱係数Aが二番目に大きく、ハウジング30の熱係数Aが最も小さい。これは、機器構成部材を構成する材質、機器構成部材の体積、モータ20と機器構成部材との距離などによって決まる(図1参照)。そして、このように取得された各部材の熱係数Aは、予め用意されている。
【0050】
図3に示すように、温度上昇量演算部66は、ブラシ28の単位時間あたりの温度上昇量の推定値である温度上昇速度ΔTb(n)を演算する。具体的には、温度上昇量演算部66は、発熱エネルギ演算部63で演算された発熱エネルギ速度Einと、放熱エネルギ演算部65で演算された放熱エネルギ速度Eout(Eout_B)とを下記の関係式(式5)に代入することにより、ブラシ28の温度上昇速度ΔTb(n)を演算する。そして、温度上昇量演算部66は、演算した温度上昇速度ΔTb(n)を温度暫定値演算部67に出力する。なお、ブラシ28用の係数Kは、「1J(ジュール)」当りの温度上昇量を示す定数であって、ブラシ28でのエネルギの出入りによって該ブラシ28の温度がどのように変化するかを示す比例定数である。
【0051】
【数5】
温度暫定値演算部67は、ブラシの今回の温度暫定値TZb(n)を演算する。具体的には、温度暫定値演算部67は、温度上昇量演算部66で演算された温度上昇速度ΔTb(n)と、温度暫定値記憶部68に記憶されるブラシ28の前回の温度暫定値TZb(n−1)とを下記の関係式(式6)に代入することにより、ブラシ28の今回の温度暫定値TZb(n)を演算する。関係式(式6)における時間tsは、温度暫定値TZbの演算間隔に相当する時間である。つまり、関係式(式6)における「ΔTb(n)・ts」は、所定周期に相当する時間でのブラシ28の温度上昇量の推定値に相当する。したがって、本実施形態では、温度上昇量演算部66及び温度暫定値演算部67により、ブラシ28の今回の温度暫定値TZb(n)を演算する暫定値演算手段が構成される。そして、温度暫定値演算部67は、演算したブラシ28の今回の温度暫定値TZb(n)を、温度暫定値記憶部68に記憶すると共に、ブラシ温度推定値特定部90に出力する。
【0052】
【数6】
次に、ヨーク温度推定値演算部70について説明する。
【0053】
ヨーク温度推定値演算部70は、モータ20での発熱量及びヨーク21からの放熱量などを考慮し、ヨーク21の温度推定値Ty(n)を演算する。こうしたヨーク温度推定値演算部70は、機能部として、入力電力取得部71、出力電力取得部72、発熱エネルギ演算部73、雰囲気温度取得部74、放熱エネルギ演算部75、温度上昇量演算部76、温度推定値演算部77及び温度推定値記憶部78を有している。
【0054】
入力電力取得部71は、ブラシ温度暫定値演算部60の入力電力演算部61で演算された入力電力Pinを取得し、該入力電力Pinを発熱エネルギ演算部73に出力する。
出力電力取得部72は、ブラシ温度暫定値演算部60の出力電力演算部62で演算された出力電力Poutを取得し、該出力電力Poutを発熱エネルギ演算部73に出力する。
【0055】
発熱エネルギ演算部73は、ブラシ温度暫定値演算部60の発熱エネルギ演算部63と同一方法で、モータ20の単位時間あたりの発熱量である発熱エネルギ速度Einを演算し、該発熱エネルギ速度Einを温度上昇量演算部76に出力する。したがって、本実施形態では、発熱エネルギ演算部73が、入力電力Pinと出力電力Poutとの差分(=Pin−Pout)に基づき、モータ20の発熱エネルギ速度Einを演算する発熱量演算手段として機能する。
【0056】
雰囲気温度取得部74は、ブラシ温度暫定値演算部60の雰囲気温度演算部64で演算された雰囲気温度Tfを取得し、該雰囲気温度Tfを放熱エネルギ演算部75に出力する。
【0057】
放熱エネルギ演算部75は、ヨーク21から放出される単位時間あたりの放熱量である放熱エネルギ速度Eoutを演算する。具体的には、放熱エネルギ演算部75は、前回のタイミングで演算したヨーク21の温度推定値Ty(n−1)を温度推定値記憶部78から読み出す。そして、放熱エネルギ演算部75は、上記関係式(式4)を利用し、ヨーク21からの放熱エネルギ速度Eout(Eout_Y)を演算する。このとき、放熱エネルギ演算部75は、ブラシ28の前回の温度暫定値TZb(n−1)の代わりに、ヨーク21の前回の温度推定値Ty(n−1)を代入することにより、ヨーク21からの放熱エネルギ速度Eout_Yを演算する。したがって、本実施形態では、放熱エネルギ演算部75が、ヨーク(他の機器構成部材)21の前回の温度推定値Ty(n−1)と雰囲気温度Tfとの差分と、ヨーク21の熱特性を示す熱係数Aとに基づき、ヨーク21からの放熱エネルギ速度Eout_Yを演算する放熱量演算手段として機能する。
【0058】
温度上昇量演算部76は、ヨーク21の単位時間あたりの温度上昇量の推定値である温度上昇速度ΔTy(n)を演算する。具体的には、温度上昇量演算部76は、発熱エネルギ演算部73で演算された発熱エネルギ速度Einと、放熱エネルギ演算部75で演算された放熱エネルギ速度Eout(Eout_Y)とを上記関係式(式5)に代入することにより、ヨーク21の温度上昇速度ΔTy(n)を演算する。この場合、ヨーク21用の係数Kには、ヨーク21の熱容量の逆数が設定される。そして、温度上昇量演算部76は、演算した温度上昇速度ΔTy(n)を温度推定値演算部77に出力する。
【0059】
温度推定値演算部77は、上記関係式(式6)を利用し、ヨーク21の今回の温度推定値Ty(n)を演算する。このとき、温度推定値演算部77は、ブラシ28の前回の温度暫定値TZb(n−1)の代わりにヨーク21の前回の温度推定値Ty(n−1)を代入すると共に、ブラシ28の温度上昇速度ΔTb(n)の代わりにヨーク21の温度上昇速度ΔTy(n)を代入する。したがって、本実施形態では、温度上昇量演算部76及び温度推定値演算部77により、ヨーク(他の機器構成部材)21の今回の温度推定値Ty(n)を推定する推定値演算手段が構成される。そして、温度推定値演算部77は、演算したヨーク21の今回の温度推定値Ty(n)を、温度推定値記憶部78に記憶すると共に、ブラシ温度推定値特定部90に出力する。
【0060】
次に、ハウジング温度推定値演算部80について説明する。
ハウジング温度推定値演算部80は、モータ20での発熱量及びハウジング30からの放熱量などを考慮し、ハウジング30の温度推定値Th(n)を演算する。こうしたハウジング温度推定値演算部80は、機能部として、入力電力取得部81、出力電力取得部82、発熱エネルギ演算部83、雰囲気温度取得部84、放熱エネルギ演算部85、温度上昇量演算部86、温度推定値演算部87及び温度推定値記憶部88を有している。
【0061】
入力電力取得部81は、ブラシ温度暫定値演算部60の入力電力演算部61で演算された入力電力Pinを取得し、該入力電力Pinを発熱エネルギ演算部83に出力する。
出力電力取得部82は、ブラシ温度暫定値演算部60の出力電力演算部62で演算された出力電力Poutを取得し、該出力電力Poutを発熱エネルギ演算部83に出力する。
【0062】
発熱エネルギ演算部83は、ブラシ温度暫定値演算部60の発熱エネルギ演算部63と同一方法で、モータ20の単位時間あたりの発熱量である発熱エネルギ速度Einを演算し、該発熱エネルギ速度Einを温度上昇量演算部86に出力する。したがって、本実施形態では、発熱エネルギ演算部83が、入力電力Pinと出力電力Poutとの差分(=Pin−Pout)に基づき、モータ20の発熱エネルギ速度Einを演算する発熱量演算手段として機能する。
【0063】
雰囲気温度取得部84は、ブラシ温度暫定値演算部60の雰囲気温度演算部64で演算された雰囲気温度Tfを取得し、該雰囲気温度Tfを放熱エネルギ演算部85に出力する。
【0064】
放熱エネルギ演算部85は、ハウジング30から放出される単位時間あたりの放熱量である放熱エネルギ速度Eout(Eout_H)を演算する。具体的には、放熱エネルギ演算部85は、前回のタイミングで演算したハウジング30の温度推定値Th(n−1)を温度推定値記憶部88から読み出す。そして、放熱エネルギ演算部85は、上記関係式(式4)を利用し、ハウジング30からの放熱エネルギ速度Eout_Hを演算する。このとき、放熱エネルギ演算部85は、ブラシ28の前回の温度暫定値TZb(n−1)の代わりに、ハウジング30の前回の温度推定値Th(n−1)を代入することにより、ハウジング30からの放熱エネルギ速度Eout_Hを演算する。したがって、本実施形態では、放熱エネルギ演算部85が、ハウジング(他の機器構成部材)30の前回の温度推定値Th(n−1)と雰囲気温度Tfとの差分と、ハウジング30の熱特性を示す熱係数Aとに基づき、ハウジング30からの放熱エネルギ速度Eout_Hを演算する放熱量演算手段として機能する。
【0065】
温度上昇量演算部86は、ハウジング30の単位時間あたりの温度上昇量の推定値である温度上昇速度ΔTh(n)を演算する。具体的には、温度上昇量演算部86は、発熱エネルギ演算部83で演算された発熱エネルギ速度Einと、放熱エネルギ演算部85で演算された放熱エネルギ速度Eout(Eout_H)とを上記関係式(式5)に代入することにより、ハウジング30の温度上昇速度ΔTh(n)を演算する。この場合、ハウジング30用の係数Kには、ハウジング30の熱容量の逆数が設定される。そして、温度上昇量演算部86は、演算した温度上昇速度ΔTh(n)を温度推定値演算部87に出力する。
【0066】
温度推定値演算部87は、上記関係式(式6)を利用し、ハウジング30の今回の温度推定値Th(n)を演算する。このとき、温度推定値演算部87は、ブラシ28の前回の温度暫定値TZb(n−1)の代わりにハウジング30の前回の温度推定値Th(n−1)を代入すると共に、ブラシ28の温度上昇速度ΔTb(n)の代わりにハウジング30の温度上昇速度ΔTh(n)を代入する。したがって、本実施形態では、温度上昇量演算部86及び温度推定値演算部87により、ハウジング(他の機器構成部材)30の今回の温度推定値Th(n)を推定する推定値演算手段が構成される。そして、温度推定値演算部87は、演算したハウジング30の今回の温度推定値Th(n)を、温度推定値記憶部88に記憶すると共に、ブラシ温度推定値特定部90に出力する。
【0067】
次に、ブラシ温度推定値特定部90について説明する。
ブラシ温度推定値特定部90は、ブラシ28の今回の温度暫定値TZb(n)、ヨーク21の今回の温度推定値Tb(n)及びハウジング30の今回の温度推定値Th(n)に基づき、ブラシ28の今回の温度推定値Tb(n)を特定(設定)する。具体的には、ブラシ温度推定値特定部90は、モータ20の駆動時には、ブラシ28の今回の温度暫定値TZb(n)を、ブラシ28の今回の温度推定値Tb(n)とする。一方、ブラシ温度推定値特定部90は、モータ20の駆動後の停止時には、ブラシ28の今回の温度暫定値TZb(n)、ヨーク21の今回の温度推定値Tb(n)及びハウジング30の今回の温度推定値Th(n)のうち、最も大きな値をブラシ28の今回の温度推定値Tb(n)とする。
【0068】
ここで、上記の方法でブラシ28の温度を推定する理由について、図5〜図7を参照して説明する。
図5に示すグラフには、ブラシ28の温度暫定値TZb、ヨーク21の温度推定値Ty及びハウジング30の温度推定値Thがプロットされている。図5に示すように、モータ20の駆動中においては、自身が発熱源でもあり且つ熱容量が最も少ないブラシ28の温度暫定値TZbは、ヨーク21及びハウジング30の温度推定値Ty,Thに比べて大きな値になる。また、2番目に熱容量の少ないヨーク21の温度推定値Tyは、ハウジング30の温度推定値Thに比べて大きな値になる。
【0069】
その一方で、モータ20の駆動が停止する第1のタイミングt11以降では、ブラシ28の温度暫定値TZb、ヨーク21及びハウジング30の温度推定値Ty,Thは、小さくなる。特に熱容量の最も少ないブラシ28の温度暫定値TZbは、急激に小さくなる。そして、ブラシ28の温度暫定値TZbは、第2のタイミングt12を経過した時点で、ヨーク21の温度推定値Tyよりも小さくなり、その後の第3のタイミングt13を経過した時点で、ハウジング30の温度推定値Thよりも小さくなる。
【0070】
しかし、モータ20の駆動停止後では、ブラシ28の温度は、図5での温度暫定値TZbのように変化しない。すなわち、ブラシ28からの実際の放熱エネルギ速度は、特にモータ20の停止時では、ブラシ28周辺の温度、即ち雰囲気温度Tfだけではなく、ブラシ28の周辺に位置する他の部材(この場合、ヨーク21やハウジング30)の温度によって決まる。ヨーク21及びハウジング30の熱容量がブラシ28よりも熱容量が多いため、ヨーク21及びハウジング30の温度はブラシ28のように急激には低下しない。
【0071】
つまり、モータ20の停止後において、ブラシ28のほうがヨーク21よりも高温である間では、ブラシ28からヨーク21やハウジング30側に熱が移動するため、ブラシ28の温度が急激に変化する。しかし、ブラシ28とヨーク21とがほぼ同一温度となると、ブラシ28とヨーク21との間での熱移動がほとんど無くなり、ブラシ28の温度は、ヨーク21の温度を大きく下回らない。すなわち、ブラシ28の温度は、ヨーク21の温度と略同一速度で低下するようになる。
【0072】
上記第2のタイミングt12が経過すると、ブラシ28及びヨーク21の熱は、ブラシ28及びヨーク21よりも高温のハウジング30側に移動する。しかし、ブラシ28及びヨーク21の温度がハウジング30の温度とほぼ同一温度となると、ブラシ28及びヨーク21とハウジング30との間での熱移動がほとんど無くなり、ブラシ28及びヨーク21の温度は、ハウジング30の温度を大きく下回らない。すなわち、ブラシ28及びヨーク21の温度は、ハウジング30の温度と略同一速度で低下するようになる。
【0073】
これに対し、温度暫定値TZbは、モータ20での発熱エネルギ速度Einと、雰囲気温度Tfを利用して演算される放熱エネルギ速度Eout_Bとに基づき演算される。すなわち、温度暫定値TZbは、ブラシ28の周辺に位置する他の機器構成部材の温度を加味することなく演算された値である。そのため、図6(a)に示すように、モータ20の駆動停止後では、温度暫定値TZbは、ブラシ28の実際の温度から大きく乖離するおそれがある。
【0074】
そこで、本実施形態では、モータ20の駆動中及び駆動停止後から第2のタイミングt12までは、温度暫定値TZbがヨーク21及びハウジング30の温度推定値Ty,Thよりも高温であるため、温度暫定値TZbがブラシ28の温度推定値Tbとされる。また、第2のタイミングt12以降からヨーク21の温度推定値Tyがハウジング30の温度推定値Th未満になるまでの間では、温度暫定値TZbがヨーク21の温度推定値Tyを下回るため、ヨーク21の温度推定値Tyが、ブラシ28の温度推定値Tbとされる。そして、ヨーク21の温度推定値Tyがハウジング30の温度推定値Th未満になった場合では、ハウジング30の温度推定値Thが、ブラシ28の温度推定値Tbとされる。その結果、図6(a)(b)に示すように、モータ20の駆動停止後において、ブラシ28の温度推定値Tbは、温度暫定値TZbと比較してブラシ28の温度の実測値に近い値となる。
【0075】
図7(a)(b)には、モータ20の駆動と停止とを連続して繰り返す場合のブラシ28の温度暫定値TZbとブラシ28の温度推定値Tbとの変動する様子が示されている。図7(a)(b)に示すように、モータ20の駆動と停止とを連続して繰り返す場合であっても、本実施形態の推定方法で設定したブラシ28の温度推定値Tbは、ブラシ28の温度暫定値TZb(図7(a)参照)よりもブラシ28の温度の実測値に近い値となる。
【0076】
次に、モータ20のブラシ28、ヨーク21及びハウジング30の温度を推定するための温度推定処理ルーチンについて、図8に示すフローチャートを参照して説明する。この温度推定処理ルーチンは、予め設定された所定周期毎に実行される処理ルーチンである。なお、所定周期は、上記時間tsと一致している。
【0077】
さて、温度推定処理ルーチンにおいて、温度推定部53は、回数nを「1」だけインクリメントする(ステップS10)。続いて、温度推定部53は、上記関係式(式2)を用いてモータ20への入力電力Pinを演算し(ステップS11)、上記関係式(式3)を用いてモータ20からの出力電力Poutを演算する(ステップS12)。すなわち、ステップS11では、モータ20に流れる電流値Imとモータ20に印加される電圧値Vmとを乗算することにより、入力電力Pinが導き出される。また、ステップS12では、モータ20の回転数Nと駆動トルクTと定数(=0.14796)とを乗算することにより、出力電力Poutが導き出される。
【0078】
そして、温度推定部53は、ステップS11で演算した入力電力PinからステップS12で演算した出力電力Poutを減算してモータ20からの発熱エネルギ速度Ein(=Pin−Pout)を演算する(ステップS13)。続いて、温度推定部53は、モータ20の設置環境の雰囲気温度Tfを取得する(ステップS14)。
【0079】
そして、温度推定部53は、上記関係式(式4)を用い、ブラシ28からの放熱エネルギ速度Eout_B、ヨーク21からの放熱エネルギ速度Eout_Y及びハウジング30からの放熱エネルギ速度Eout_Hを演算する(ステップS15)。すなわち、ブラシ28の前回の温度暫定値TZb(n−1)から雰囲気温度Tfを減算し、該減算値(=(TZb(n−1)−Tf))をブラシ28の熱特性を示す熱係数Aで除算することにより、ブラシ28の放熱エネルギ速度Eout_Bが導き出される。また、ヨーク21の前回の温度推定値Ty(n−1)から雰囲気温度Tfを減算し、該減算値(=(Ty(n−1)−Tf))をヨーク21の熱特性を示す熱係数Aで除算することにより、ヨーク21の放熱エネルギ速度Eout_Yが導き出される。さらに、ハウジング30の前回の温度推定値Th(n−1)から雰囲気温度Tfを減算し、該減算値(=(Th(n−1)−Tf))をハウジング30の熱特性を示す熱係数Aで除算することにより、ハウジング30の放熱エネルギ速度Eout_Hが導き出される。
【0080】
続いて、温度推定部53は、上記関係式(式5)を用い、ブラシ28の温度上昇速度ΔTb(n)、ヨーク21の温度上昇速度ΔTy(n)及びハウジング30の温度上昇速度ΔTh(n)を演算する(ステップS16)。すなわち、モータ20の発熱エネルギ速度Einからブラシ28の放熱エネルギ速度Eout_Bを減算し、該減算値(=(Ein−Eout_B))にブラシ28用の係数Kを乗算することにより、ブラシ28の今回の温度上昇速度ΔTb(n)が導き出される。また、モータ20の発熱エネルギ速度Einからヨーク21の放熱エネルギ速度Eout_Yを減算し、該減算値(=(Ein−Eout_Y))にヨーク21用の係数Kを乗算することにより、ヨーク21の今回の温度上昇速度ΔTy(n)が導き出される。さらに、モータ20の発熱エネルギ速度Einからハウジング30の放熱エネルギ速度Eout_Hを減算し、該減算値(=(Ein−Eout_H))にハウジング30用の係数Kを乗算することにより、ハウジング30の今回の温度上昇速度ΔTy(n)が導き出される。
【0081】
ここで、対象部材の温度上昇速度を演算する場合に、対象部材の発熱エネルギ速度の代わりに、モータ20の発熱エネルギ速度Einを用いる理由について説明する。
ブレーキハイドロユニット12の主な発熱源は、モータ20である。このモータ20が駆動すると、該駆動に基づき発生した熱は、ブレーキハイドロユニット12を構成する各機器構成部材に伝達される。その結果、各機器構成部材の温度が上昇する。つまり、各機器構成部材の温度上昇は、モータ20の駆動に基づいた温度上昇である。そのため、各機器構成部材の温度上昇速度は、モータ20の駆動速度、即ちモータ20の発熱エネルギ速度Einとほぼ比例する。そのため、対象部材の発熱エネルギ速度を個別に取得しなくても、モータ20の発熱エネルギ速度Einを用いることにより、各機器構成部材の今回の温度上昇速度が導き出される。
【0082】
フローチャートの説明に戻り、温度推定部53は、上記関係式(式6)を用い、ブラシ28の今回の温度暫定値TZb(n)を演算する(ステップS17)。すなわち、ブラシ28の今回の温度上昇速度ΔTb(n)に時間tsを乗算し、所定周期での温度上昇量(=(ΔTb(n)・ts))に対してブラシ28の前回の温度暫定値TZb(n−1)を加算することにより、ブラシ28の今回の温度暫定値TZb(n)が導き出される。したがって、本実施形態では、ステップS17が、暫定値推定ステップに相当する。
【0083】
続いて、温度推定部53は、ステップS17で演算したブラシ28の今回の温度暫定値TZb(n)を温度暫定値記憶部68に記憶させる(ステップS18)。そして、温度推定部53は、上記関係式(式6)を用い、ヨーク21の今回の温度推定値Ty(n)及びハウジング30の今回の温度推定値Th(n)を演算する(ステップS19)。すなわち、ヨーク21の今回の温度上昇速度ΔTy(n)に時間tsを乗算し、所定周期での温度上昇量(=(ΔTy(n)・ts))に対してヨーク21の前回の温度推定値Ty(n−1)を加算することにより、ヨーク21の今回の温度推定値Ty(n)が導き出される。同様に、ハウジング30の今回の温度上昇速度ΔTh(n)に時間tsを乗算し、所定周期での温度上昇量(=(ΔTh(n)・ts))に対してハウジング30の前回の温度推定値Th(n−1)を加算することにより、ハウジング30の今回の温度推定値Th(n)が導き出される。したがって、本実施形態では、ステップS19が、温度取得ステップに相当する。
【0084】
続いて、温度推定部53は、ステップS19で演算したヨーク21の今回の温度推定値Ty(n)を温度推定値記憶部78に記憶させると共に、ハウジング30の今回の温度推定値Th(n)を温度推定値記憶部88に記憶させる(ステップS20)。そして、温度推定部53は、モータ20が駆動中であるか否かを判定する(ステップS21)。モータ20が駆動中である場合(ステップS21:YES)、温度推定部53は、ステップS17で演算したブラシ28の今回の温度暫定値TZb(n)を、ブラシ28の今回の温度推定値Tb(n)とする(ステップS22)。その後、温度推定部53は、温度推定処理ルーチンを一旦終了する。したがって、本実施形態では、ステップS22が、モータ駆動時推定値設定ステップに相当する。
【0085】
一方、モータ20が停止中である場合(ステップS21:NO)、温度推定部53は、ステップS17で演算したブラシ28の今回の温度暫定値TZb(n)、ステップS19で演算したヨーク21の今回の温度推定値Ty(n)及びハウジング30の今回の温度推定値Th(n)のうち最も高温となる値を、ブラシ28の今回の温度推定値Tb(n)とする(ステップS23)。その後、温度推定部53は、温度推定処理ルーチンを一旦終了する。したがって、本実施形態では、ステップS23が、モータ停止時推定値設定ステップに相当する。
【0086】
したがって、本実施形態では、以下に示す効果を得ることができる。
(1)モータ20の駆動停止後では、ブラシ28の温度は、ブラシ28の温度暫定値TZb(n)と、モータ20の駆動中ではブラシ28の温度暫定値TZb(n)よりも低温だったヨーク21及びハウジング30の温度推定値Ty(n),Th(n)とに基づき推定される。すなわち、ブラシ28の温度推定値Ty(n)は、ブラシ28の温度暫定値TZb(n)、ヨーク21及びハウジング30の温度推定値Ty(n),Th(n)のうち最高値とされる。これは、モータ20の駆動停止後では、ブラシ28は、該ブラシ28よりも熱容量の大きなヨーク21及びハウジング30よりも低温になる可能性が低いためである。このようにモータ20の駆動停止後においては、ブラシ28の周辺に位置する他の機器構成部材(ヨーク21、ハウジング30)の温度推定値を加味して、ブラシ28の温度推定値Tb(n)が取得される。したがって、モータ20の駆動停止後において、ブレーキハイドロユニット12を構成する機器構成部材の一つであるブラシ28の温度の推定精度を向上させることができる。
【0087】
(2)ハウジング30は、ブレーキハイドロユニット12を構成する複数の機器構成部材のうち最も熱容量の多い部材である。そのため、モータ20の駆動停止時では、ブラシ28の温度がハウジング30の温度を下回らない。そこで、本実施形態では、熱容量の最も多いハウジング30の温度推定値Thが取得される。そして、モータ20の駆動停止時では、ハウジング30の今回の温度推定値Th(n)を考慮しつつ、ブラシ28の今回の温度推定値Tb(n)が設定される。そのため、ブラシ28の温度の推定精度を向上させることができる。
【0088】
(3)モータ20の発熱エネルギ速度Einは、モータ20への入力電力Pinからモータ20からの出力電力Poutを減算することにより導き出される。また、ブラシ28からの放熱エネルギ速度Eout_Bは、ブラシ28の前回の温度暫定値TZb(n−1)から雰囲気温度Tfを減算した値を、ブラシ28の熱特性を示す熱係数Aで除算することにより取得される。放熱エネルギ速度Eout_Bの演算時にブラシ28の前回の温度暫定値TZb(n−1)と雰囲気温度Tfとの差分を利用する理由は、該差分の大小によって、ブラシ28からの単位時間あたりの放熱量が変動するためである。そのため、熱係数Aを適切な値に設定しておくことにより、ブラシ28からの放熱エネルギ速度Eout_Bの推定精度を向上させることができる。
【0089】
そして、このようにして演算されたモータ20の発熱エネルギ速度Einとブラシ28からの放熱エネルギ速度Eout_Bとに基づき、ブラシ28の温度上昇速度ΔTb(n)が取得される。その結果、ブラシ28の今回の温度暫定値TZb(n)の推定精度が向上する。そして、モータ20の駆動時には、演算した温度暫定値TZb(n)が、ブラシ28の温度推定値Tb(n)とされる。したがって、モータ20の駆動時でのブラシ28の温度の推定精度を向上させることができる。
【0090】
(4)もし仮に、モータ20の停止時におけるブラシ28の温度の推定精度が悪かったとすると、モータ20の駆動中におけるブラシ28の温度上昇速度ΔTb(n)を精度良く取得できても、モータ20の駆動中のブラシ28の温度を精度良く推定することはできない。これは、モータ20の駆動開始直前のブラシ28の温度推定値が実際の温度と乖離しているためである。この点、本実施形態では、モータ20の停止時でもブラシ28の温度が精度良く推定される分、モータ20の駆動中のブラシ28の温度を精度良く推定することができる。
【0091】
(5)モータ20の発熱エネルギ速度Einを演算する方法としては、モータ20に流れる電流値Imを2乗した値に所定の比例定数を乗算する方法も考えられる。この方法では、モータ20からのアウトプットを利用しない一方で、モータ20に対するインプット(即ち、電流値)を利用して、モータ20の発熱エネルギ速度Einが演算される。この場合、モータ20の駆動トルクが変動するような状況では、発熱エネルギ速度Einの推定精度にばらつきが生じるおそれがある。この点、本実施形態では、モータ20への入力電力Pinとモータ20からの出力電力Poutとを用いて、発熱エネルギ速度Einが演算される。つまり、本実施形態では、モータ20に対するインプットだけではなくモータ20からのアウトプットも利用して、モータ20の発熱エネルギ速度Einが演算される。したがって、モータ20の駆動トルクTに変動が生じる場合であっても、モータ20の発熱エネルギ速度Einが精度良く推定されるため、ブラシ28の温度の推定精度を向上させることができる。
【0092】
(6)特に、減速時に回生制動力を利用可能な車両においては、運転手によって要求される制動力(以下、「要求制動力」ともいう。)が、付与可能な回生制動力の最大値以下である場合には、ブレーキハイドロユニット12が駆動しない。その一方で、要求制動力が回生制動力の最大値を超える場合には、要求制動力と回生制動力との差分を補うようにブレーキハイドロユニット12が駆動する。しかも、このときのモータ20に要求される駆動トルクTは、要求制動力と回生制動力との差分の大きさによって変動する。こうした使用環境の元で駆動するブレーキハイドロユニット12を構成するブラシ28の温度が、本実施形態の温度推定方法で推定される。換言すると、本実施形態の温度推定方法では、モータ20の駆動態様がその時々によって変動するブレーキハイドロユニット12のブラシ28の温度の推定精度を向上させることができる。
【0093】
(7)ブラシ付きのモータ20では、ブラシ28がロータ24に摺動するため、該ブラシ28は高温になりやすい。こうしたブラシ28が温度上昇によって故障してしまうと、モータ20の故障にも繋がる。この点、本実施形態では、ブラシ28の温度が精度良く推定されるため、ブラシ28が高温になり過ぎる前に、モータ20の駆動を制限するような制限制御を、適切なタイミングで開始させることができる。
【0094】
(8)また、ブラシ28の温度が精度良く推定されるため、制限制御の開始タイミングを特定するための温度閾値を、比較的高い値に設定することができる。その結果、本来はモータ20を未だ駆動させていてもよいタイミングで、上記制限制御が開始されてしまうことを抑制できる。つまり、モータ20の連続駆動の許容時間を長くすることができる。
【0095】
(9)ヨーク21及びハウジング30の温度推定値Ty(n),Th(n)は、ブラシ28の温度暫定値TZb(n)の演算方法と同一方法で演算される。すなわち、ヨーク21及びハウジング30の温度推定値Ty(n),Th(n)を、専用の温度センサを用いることなく推定することができる。
【0096】
(10)ハウジング30内に収容される電磁弁31の中には、温度によって作動特性が変化するものもある。こうした電磁弁31の温度は、ハウジング30の温度変化に応じて変化する。そのため、ハウジング30において電磁弁31近傍の部位の温度を精度良く推定することができれば、該ハウジング30内に収容される電磁弁31の温度を推定することができる。この点、本実施形態では、ハウジング30において電磁弁31近傍の部位の温度が精度良く推定される。そのため、ハウジング30において電磁弁31近傍の部位の温度に応じて、電磁弁31に流す電流値を調整することにより、電磁弁31の温度変化に基づいた電磁弁31の作動態様のばらつきが抑制される。したがって、車輪11に対する制動力を適切に制御できる。
【0097】
(11)温度センサSE1は、回路基板41に設けられる制御装置50の温度を検出するためのセンサである。本実施形態では、こうした温度センサSE1を利用して、雰囲気温度Tfが取得される。そのため、モータ20付近の温度を検出するための温度センサを設けなくても、雰囲気温度Tfを適切に設定でき、ひいてはブラシ28、ヨーク21及びハウジング30の放熱エネルギ速度Eout_B,Eout_Y,Eout_Hの推定精度を向上させることができる。
【0098】
なお、実施形態は以下のような別の実施形態に変更してもよい。
・実施形態において、ブラシ28以外の他の機器構成部材の温度の推定方法は、上記の方法以外の他の任意の方法であってもよい。例えば、モータ20に流れる電流値Imを2乗した値に所定の比例定数を乗算してモータ20の発熱エネルギ速度Einを導出し、該発熱エネルギ速度Einを用いヨーク21及びハウジング30の温度推定値Ty(n),Th(n)を演算してもよい。
【0099】
・実施形態において、ブラシ28以外の他の機器構成部材の温度を検出するための温度センサを設け、該センサからの検出信号に基づき他の機器構成部材の温度を検出するようにしてもよい。この場合、モータ20の駆動停止後では、検出した他の機器構成部材の温度を用い、ブラシ28の温度を推定するようにしてもよい。
【0100】
・実施形態において、ヨーク21の温度推定値Ty(n)を取得しなくてもよい。この場合、モータ20の駆動停止後では、ブラシ28の温度暫定値TZb(n)及びハウジング30の温度推定値Th(n)のうち最大値に基づき、ブラシ28の温度推定値Tb(n)が設定される。
【0101】
・実施形態において、ヨーク21及びハウジング30以外の他の機器構成部材(例えば、エンドプレート22)の温度推定値を取得するようにしてもよい。ただし、温度を取得する機器構成部材は、対象部材であるブラシ28よりも熱容量の大きな部材であることが好ましい。そして、モータ20の駆動停止後では、エンドプレート22の温度推定値も利用しつつ、ブラシ28の温度推定値Tb(n)が設定される。
【0102】
・実施形態において、対象部材は、ブラシ28以外の他の機器構成部材(例えば、電機子コイル240b)であってもよい。ただし、対象部材は、ブレーキハイドロユニット12を構成する各機器構成部材のうち、最も熱容量の多い部材(この場合、ハウジング30)以外であることが好ましい。
【0103】
・モータ20の駆動停止後においては、ヨーク21の温度推定値Ty(n)を、該温度推定値Ty(n)及びハウジング30の温度推定値Th(n)のうち最も大きな値としてもよい。
【0104】
・実施形態において、対象部材の温度の推定方法は、上記の方法以外の他の任意の方法であってもよい。例えば、モータ20に流れる電流値Imを2乗した値に所定の比例定数を乗算してモータ20の発熱エネルギ速度Einを導出し、該発熱エネルギ速度Einを用い対象部材の温度暫定値を演算してもよい。
【0105】
・モータ20の駆動停止後において、温度暫定値TZb(n)が他の機器構成部材の温度未満になった場合には、該温度に所定の係数を乗算した値を、ブラシ28の温度推定値Tb(n)としてもよい。
【0106】
このとき、温度暫定値TZb(n)がヨーク21の温度推定値Ty(n)未満になった場合には、該温度推定値Ty(n)に所定の第1係数(1よりも大きな値であって、例えば「1.1」)を乗算した値を、ブラシ28の温度推定値Tb(n)としてもよい。その後、ヨーク21の温度推定値Ty(n)がハウジング30の温度推定値Th(n)未満になった場合には、該温度推定値Th(n)に所定の第2係数(1よりも大きな値であって、例えば「1.2」)を乗算した値を、ブラシ28の温度推定値Tb(n)としてもよい。この場合、第2係数は、第1係数よりも大きな値であることが好ましい。
【0107】
・実施形態において、車両のエンジンルーム内の温度を検出するための温度センサが、エンジンルーム内に設置されている場合、雰囲気温度演算部64は、該温度センサからの検出信号に基づきブレーキハイドロユニット12付近の雰囲気温度Tfを検出してもよい。
【0108】
また、雰囲気温度Tfは、車両のイグニッションスイッチがオンになった直後に取得された温度としてもよい。このときの雰囲気温度Tfは、予め設定された温度であってもよい。
【0109】
・実施形態において、温度推定処理ルーチンは、車両のイグニッションスイッチがオフになっても継続させてよい。この場合、ブラシ28の温度推定値Tb(n)が雰囲気温度Tfと一致するようになった場合に、温度推定処理ルーチンを終了させてもよい。
【0110】
・実施形態において、モータ20の出力軸241近傍に回転数検出用のセンサ(例えば、ロータリーエンコーダ)を設け、該センサからの検出信号に基づきモータ20の回転数Nを検出してもよい。この場合には、回転数検出用のセンサからの出力を用いて、モータ20の駆動トルクTを検出してもよい。
【0111】
・実施形態において、トルク検出センサをモータ20に設け、該センサからの検出信号に基づきモータ20の駆動トルクTを検出してもよい。
・実施形態において、電子機器に搭載されるモータは、ブラシレスのモータであってもよい。すなわち、モータは、ステッピングモータ及びボイスコイルモータなどであってもよい。
【0112】
・本発明の電子機器を、車載の電子機器であれば、ブレーキハイドロユニット以外の他の機器に具体化してもよい。例えば、電子機器を、電動パワーステアリング装置に具体化してもよいし、電動パーキングブレーキ装置に具体化してもよい。
【0113】
・本発明の電子機器を、洗濯機や食器洗浄機などの家庭用電子機器に具体化してもよい。
次に、上記実施形態及び別の実施形態から把握できる技術的思想を以下に追記する。
【0114】
(イ)前記温度取得手段(70、S19)は、前記モータ(20)のヨーク(21)の温度(Ty(n))を、前記他の機器構成部材の温度として取得することを特徴とするに記載の温度推定装置。
【0115】
(ロ)前記電子機器(12)は、前記モータ(20)を駆動源とする駆動部(32)が収容されるハウジング(30)をさらに備え、前記モータ(20)は、そのヨーク(21)を介して取り付けられる前記ハウジング(30)に取り付けられており、
前記温度取得手段(80、S19)は、前記ハウジング(30)の温度(Th(n))を、前記他の機器構成部材の温度として取得することを特徴とする温度推定装置。
【0116】
ハウジング内には、制御装置などによって制御される電磁弁などの制御対象が収容されている。こうした制御対象の作動特性は、自身の温度によって多少変化する。そのため、制御対象の温度を正確に推定できれば、制御対象を、より適切に制御することができる。そのため、ハウジングの温度を正確に推定できれば、該推定結果に基づいた制御対象の制御を行うことにより、該制御対象を、より適切に作動させることができる。この点、本発明では、ハウジングの温度が精度良く推定される。その結果、このハウジングの温度推定値に基づいた制御対象の制御を行うことにより、該電磁弁を、より適切に作動させることができる。
【0117】
(ハ)前記電子機器(12)は、車両に搭載される車輪(11)に対する制動力を調整するものであり、
前記ハウジング(30)内には、前記車輪(11)に対する制動力を調整すべく作動する電磁弁(31)が設けられていることを特徴とする温度推定装置。
【0118】
上記構成によれば、ハウジングの温度を精度良く推定し、該推定結果に基づいた電磁弁の制御を行うことにより、該電磁弁を、より適切に作動させることができる。すなわち、車輪に対する制動力を、適切に調整することができる。
【符号の説明】
【0119】
11…車輪、12…電子機器の一例としてのブレーキハイドロユニット。20…モータ、21…機器構成部材及び対象部材の一例としてのヨーク、22…機器構成部材及び対象部材の一例としてのエンドプレート、240a…機器構成部材及び対象部材の一例としてのコア、240b…機器構成部材及び対象部材の一例としての電機子コイル、241…機器構成部材及び対象部材の一例としての出力軸、242…機器構成部材及び対象部材の一例としての整流子、25…機器構成部材及び対象部材の一例としての磁石、26…機器構成部材及び対象部材の一例としての軸受、28…機器構成部材及び対象部材の一例としてのブラシ、29A…機器構成部材及び対象部材の一例としての付勢部材、30…機器構成部材及び対象部材の一例としてのハウジング、31…電磁弁、32…駆動部の一例としてのポンプ、53…温度推定装置の一例としての温度推定部、60…暫定値推定手段の一例としてのブラシ温度暫定値演算部、63…発熱量演算手段の一例としての発熱エネルギ演算部、65…放熱量演算手段の一例としての放熱エネルギ演算部、66…暫定値演算手段を構成する温度上昇量演算部、67…暫定値演算手段を構成する温度暫定値演算部、70…温度取得手段の一例としてのヨーク温度推定値演算部、73,83…発熱量演算手段の一例としての発熱エネルギ演算部、75,85…放熱量演算手段の一例としての放熱エネルギ演算部、76,86…推定値演算手段を構成する温度上昇量演算部、77,87…推定値演算手段を構成する温度推定値演算部、80…温度取得手段の一例としてのハウジング温度推定値演算部、90…推定値設定手段の一例としてのブラシ温度推定値特定部、A…熱係数、Ein…発熱量の一例としての発熱エネルギ速度、Eout,Eout_B,Eout_Y,Eout_H…放熱量の一例としての放熱エネルギ速度、Pin…入力エネルギ相当値の一例としての入力電力、Pout…出力エネルギ相当値の一例としての出力電力、Tf…雰囲気温度、Tb(n)…対象部材の今回の温度推定値、Tb(n−1)…対象部材の前回の温度推定値、Ty(n),Th(n)…他の機器構成部材の今回の温度推定値、Ty(n−1),Th(n−1)…他の機器構成部材の前回の温度推定値、TZb(n)…対象部材の今回の温度暫定値、TZb(n−1)…対象部材の前回の温度暫定値、ΔTb(n)…対象部材の温度上昇速度、ΔTy(n),ΔTh(n)…他の機器構成部材の温度上昇速度。
【特許請求の範囲】
【請求項1】
モータ(20)を備える電子機器(12)を構成する機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち対象部材(28)の温度を、予め設定された周期毎に推定する温度推定装置であって、
前記対象部材(28)の温度暫定値(TZb(n))を推定する暫定値推定手段(60、S17)と、
前記機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち前記対象部材(28)以外の他の機器構成部材(21,30)の温度(Ty(n),Th(n))を取得する温度取得手段(70,80、S19)と、
前記対象部材(28)の温度推定値(Tb(n))を設定する推定値設定手段(90、S22,S23)と、を備え、
前記推定値設定手段(90、S22,S23)は、
前記モータ(20)の駆動時には、前記暫定値推定手段(60、S17)によって推定された前記対象部材(28)の今回の温度暫定値(TZb(n))を、前記対象部材(28)の今回の温度推定値(Tb(n))とし、
前記モータ(20)の駆動停止後には、前記モータ(20)の駆動中では前記対象部材(28)の温度暫定値(TZb(n))よりも低温であった特定の機器構成部材(21,30)の今回の温度(Ty(n),Th(n))と、前記対象部材の今回の温度暫定値(TZb(n))とのうち最も高温となる値に基づき前記対象部材(28)の今回の温度推定値(Tb(n))を設定することを特徴とする温度推定装置。
【請求項2】
前記暫定値推定手段(60、S13,S15,S16,S17)は、
前記モータ(20)に入力される入力エネルギに相当する入力エネルギ相当値(Pin)と前記モータ(20)から出力される出力エネルギに相当する出力エネルギ相当値(Pout)との差分に基づき、前記モータ(20)の発熱量(Ein)を演算する発熱量演算手段(63、S13)と、
前記対象部材(28)の前回の温度暫定値(TZb(n))と前記電子機器(12)の設置環境の雰囲気温度(Tf)との差分と、前記対象部材(28)の熱特性を示す熱係数(A)とに基づき、前記対象部材(28)からの放熱量(Eout_B)を演算する放熱量演算手段(65、S15)と、
前記各演算手段(63,65、S13、S15)によって演算された発熱量(Ein)と放熱量(Eout_B)との差分とに基づき前記対象部材(28)の温度上昇量(ΔTb(n))を取得し、該温度上昇量(ΔTb(n))と前記対象部材の前回の温度暫定値(TZb(n−1))とに基づき前記対象部材の今回の温度暫定値(TZb(n))を演算する暫定値演算手段(67、S16,S17)と、を有することを特徴とする請求項1に記載の温度推定装置。
【請求項3】
前記モータ(20)は、ブラシ付きのモータであり、
前記暫定値推定手段(60、S17)は、前記モータ(20)のブラシ(28)の温度暫定値(TZb(n))を、前記対象部材の温度暫定値として推定し、
前記推定値設定手段(90、S22,S23)は、
前記モータ(20)の駆動停止後には、
前記温度取得手段(70,80、S19)によって取得された前記特定の機器構成部材(21,30)の今回の温度(Ty(n),Th(n))と、前記暫定値推定手段(60、S17)によって推定された前記ブラシ(28)の今回の温度暫定値(TZb(n))とのうち最も高温となる値に基づき前記ブラシ(28)の今回の温度推定値(Tb(n))を設定することを特徴とする請求項1又は請求項2に記載の温度推定装置。
【請求項4】
前記温度取得手段(70,80、S19)は、前記対象部材(28)よりも熱容量の多い他の機器構成部材(21,30)の温度(Ty(n),Th(n))を取得することを特徴とする請求項2又は請求項3に記載の温度推定装置。
【請求項5】
前記温度取得手段(70,80、S13,S15,S16,S19)は、
前記モータ(20)に入力される入力エネルギに相当する入力エネルギ相当値(Pin)と前記モータ(20)から出力される出力エネルギに相当する出力エネルギ相当値(Pout)との差分に基づき、前記モータ(20)の発熱量(Ein)を演算する発熱量演算手段(73,83、S13)と、
前記他の機器構成部材(21,30)の前回の温度推定値(Ty(n−1),Th(n−1))と前記電子機器(12)の設置環境の雰囲気温度(Tf)との差分と、前記他の機器構成部材(21,30)の熱特性に基づく熱係数(A)とに基づき、前記他の機器構成部材(21,30)からの放熱量(Eout_Y,Eout_H)を演算する放熱量演算手段(75,85、S15)と、
前記各演算手段(73,75,83,85、S13,S15)によって演算された発熱量(Ein)と放熱量(Eout_Y,Eout_H)との差分とに基づき前記他の機器構成部材(21,30)の温度上昇量(ΔTy(n),ΔTh(n))を取得し、該温度上昇量(ΔTy(n),ΔTh(n))と前記他の機器構成部材(21,30)の前回の温度推定値(Ty(n−1),Th(n−1))とに基づき前記他の機器構成部材(21,30)の今回の温度推定値(Ty(n),Th(n))を演算する推定値演算手段(77,87、S16,S19)と、を有することを特徴とする請求項1〜請求項4のうち何れか一項に記載の温度推定装置。
【請求項6】
モータ(20)を備える電子機器(12)を構成する機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち対象部材(28)の温度を、予め設定された周期毎に推定させるための温度推定方法であって、
前記対象部材(28)の温度暫定値(TZb(n))を推定させる暫定値推定ステップ(S17)と、
前記機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち前記対象部材(28)以外の他の機器構成部材(21,30)の温度(Ty(n),Th(n))を取得させる温度取得ステップ(S19)と、
前記モータ(20)の駆動時に、前記暫定値推定ステップ(S17)で推定した前記対象部材(28)の温度暫定値(TZb(n))を、前記対象部材(28)の今回の温度推定値(Tb(n))とさせるモータ駆動時推定値設定ステップ(S22)と、
前記モータ(20)の駆動停止後に、前記モータ(20)の駆動中には前記対象部材の温度暫定値(TZb(n))よりも低温であった特定の機器構成部材(21,30)の今回の温度(Ty(n),Th(n))と、前記対象部材(28)の今回の温度暫定値(TZb(n))とのうち最も高温となる値に基づき前記対象部材(28)の今回の温度推定値(Tb(n))を設定させるモータ停止時推定値設定ステップ(S23)と、を有することを特徴とする温度推定方法。
【請求項1】
モータ(20)を備える電子機器(12)を構成する機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち対象部材(28)の温度を、予め設定された周期毎に推定する温度推定装置であって、
前記対象部材(28)の温度暫定値(TZb(n))を推定する暫定値推定手段(60、S17)と、
前記機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち前記対象部材(28)以外の他の機器構成部材(21,30)の温度(Ty(n),Th(n))を取得する温度取得手段(70,80、S19)と、
前記対象部材(28)の温度推定値(Tb(n))を設定する推定値設定手段(90、S22,S23)と、を備え、
前記推定値設定手段(90、S22,S23)は、
前記モータ(20)の駆動時には、前記暫定値推定手段(60、S17)によって推定された前記対象部材(28)の今回の温度暫定値(TZb(n))を、前記対象部材(28)の今回の温度推定値(Tb(n))とし、
前記モータ(20)の駆動停止後には、前記モータ(20)の駆動中では前記対象部材(28)の温度暫定値(TZb(n))よりも低温であった特定の機器構成部材(21,30)の今回の温度(Ty(n),Th(n))と、前記対象部材の今回の温度暫定値(TZb(n))とのうち最も高温となる値に基づき前記対象部材(28)の今回の温度推定値(Tb(n))を設定することを特徴とする温度推定装置。
【請求項2】
前記暫定値推定手段(60、S13,S15,S16,S17)は、
前記モータ(20)に入力される入力エネルギに相当する入力エネルギ相当値(Pin)と前記モータ(20)から出力される出力エネルギに相当する出力エネルギ相当値(Pout)との差分に基づき、前記モータ(20)の発熱量(Ein)を演算する発熱量演算手段(63、S13)と、
前記対象部材(28)の前回の温度暫定値(TZb(n))と前記電子機器(12)の設置環境の雰囲気温度(Tf)との差分と、前記対象部材(28)の熱特性を示す熱係数(A)とに基づき、前記対象部材(28)からの放熱量(Eout_B)を演算する放熱量演算手段(65、S15)と、
前記各演算手段(63,65、S13、S15)によって演算された発熱量(Ein)と放熱量(Eout_B)との差分とに基づき前記対象部材(28)の温度上昇量(ΔTb(n))を取得し、該温度上昇量(ΔTb(n))と前記対象部材の前回の温度暫定値(TZb(n−1))とに基づき前記対象部材の今回の温度暫定値(TZb(n))を演算する暫定値演算手段(67、S16,S17)と、を有することを特徴とする請求項1に記載の温度推定装置。
【請求項3】
前記モータ(20)は、ブラシ付きのモータであり、
前記暫定値推定手段(60、S17)は、前記モータ(20)のブラシ(28)の温度暫定値(TZb(n))を、前記対象部材の温度暫定値として推定し、
前記推定値設定手段(90、S22,S23)は、
前記モータ(20)の駆動停止後には、
前記温度取得手段(70,80、S19)によって取得された前記特定の機器構成部材(21,30)の今回の温度(Ty(n),Th(n))と、前記暫定値推定手段(60、S17)によって推定された前記ブラシ(28)の今回の温度暫定値(TZb(n))とのうち最も高温となる値に基づき前記ブラシ(28)の今回の温度推定値(Tb(n))を設定することを特徴とする請求項1又は請求項2に記載の温度推定装置。
【請求項4】
前記温度取得手段(70,80、S19)は、前記対象部材(28)よりも熱容量の多い他の機器構成部材(21,30)の温度(Ty(n),Th(n))を取得することを特徴とする請求項2又は請求項3に記載の温度推定装置。
【請求項5】
前記温度取得手段(70,80、S13,S15,S16,S19)は、
前記モータ(20)に入力される入力エネルギに相当する入力エネルギ相当値(Pin)と前記モータ(20)から出力される出力エネルギに相当する出力エネルギ相当値(Pout)との差分に基づき、前記モータ(20)の発熱量(Ein)を演算する発熱量演算手段(73,83、S13)と、
前記他の機器構成部材(21,30)の前回の温度推定値(Ty(n−1),Th(n−1))と前記電子機器(12)の設置環境の雰囲気温度(Tf)との差分と、前記他の機器構成部材(21,30)の熱特性に基づく熱係数(A)とに基づき、前記他の機器構成部材(21,30)からの放熱量(Eout_Y,Eout_H)を演算する放熱量演算手段(75,85、S15)と、
前記各演算手段(73,75,83,85、S13,S15)によって演算された発熱量(Ein)と放熱量(Eout_Y,Eout_H)との差分とに基づき前記他の機器構成部材(21,30)の温度上昇量(ΔTy(n),ΔTh(n))を取得し、該温度上昇量(ΔTy(n),ΔTh(n))と前記他の機器構成部材(21,30)の前回の温度推定値(Ty(n−1),Th(n−1))とに基づき前記他の機器構成部材(21,30)の今回の温度推定値(Ty(n),Th(n))を演算する推定値演算手段(77,87、S16,S19)と、を有することを特徴とする請求項1〜請求項4のうち何れか一項に記載の温度推定装置。
【請求項6】
モータ(20)を備える電子機器(12)を構成する機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち対象部材(28)の温度を、予め設定された周期毎に推定させるための温度推定方法であって、
前記対象部材(28)の温度暫定値(TZb(n))を推定させる暫定値推定ステップ(S17)と、
前記機器構成部材(21,22,240,241,242,25,26,28,29A,30)のうち前記対象部材(28)以外の他の機器構成部材(21,30)の温度(Ty(n),Th(n))を取得させる温度取得ステップ(S19)と、
前記モータ(20)の駆動時に、前記暫定値推定ステップ(S17)で推定した前記対象部材(28)の温度暫定値(TZb(n))を、前記対象部材(28)の今回の温度推定値(Tb(n))とさせるモータ駆動時推定値設定ステップ(S22)と、
前記モータ(20)の駆動停止後に、前記モータ(20)の駆動中には前記対象部材の温度暫定値(TZb(n))よりも低温であった特定の機器構成部材(21,30)の今回の温度(Ty(n),Th(n))と、前記対象部材(28)の今回の温度暫定値(TZb(n))とのうち最も高温となる値に基づき前記対象部材(28)の今回の温度推定値(Tb(n))を設定させるモータ停止時推定値設定ステップ(S23)と、を有することを特徴とする温度推定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−210037(P2012−210037A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−73136(P2011−73136)
【出願日】平成23年3月29日(2011.3.29)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月29日(2011.3.29)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]