
温度測定装置

【課題】放射率の影響を受けることのない正確な温度を知ることができる温度測定装置を提供する。
【解決手段】被測定物Bの熱画像を得るサーモカメラ1と、被測定物Bの可視画像を得る可視光カメラ2とを備え、コンピュータ3にて、可視画像の必要部の輝度と当該必要部の放射率の関係を得て、上記必要部に対応する熱画像の必要部から得られた温度を上記放射率で補正して補正温度を取得し、当該補正温度によって正確な熱画像を得る。
【解決手段】被測定物Bの熱画像を得るサーモカメラ1と、被測定物Bの可視画像を得る可視光カメラ2とを備え、コンピュータ3にて、可視画像の必要部の輝度と当該必要部の放射率の関係を得て、上記必要部に対応する熱画像の必要部から得られた温度を上記放射率で補正して補正温度を取得し、当該補正温度によって正確な熱画像を得る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は温度測定装置に関し、特に、被測定物の放射率に左右されない正確な温度絶対値を得ることができる温度測定装置に関する。
【背景技術】
【0002】
被測定物の温度分布画像(熱画像)を得るために例えばサーモカメラが使用される。サーモカメラは、被測定物の各部から放射される赤外線のエネルギー量を遠隔的に測定して当該各部における温度を算出し、その温度分布を色分け表示した熱画像を得るものである。
【0003】
なお、特許文献1には、被測定物の表面を、黒色塗料を塗布した放射率の大きい第1表面と、黒色塗料を塗布しない放射率の小さい第2表面に区画し、第1表面で高温範囲を測定するとともに第2表面で低温範囲を測定することによって測定温度範囲を拡大した温度測定装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−220248
【発明の概要】
【発明が解決しようとする課題】
【0005】
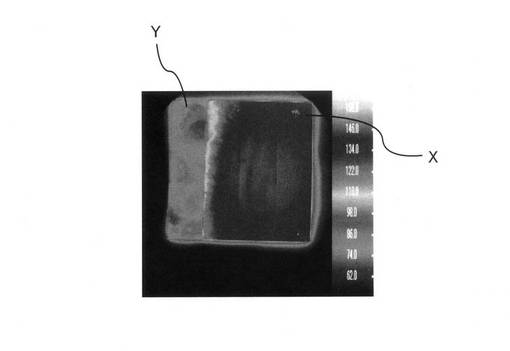
ところで、サーモカメラは上述のように被測定物の各部から放射される赤外線のエネルギー量を温度に換算するものであるため、上記各部の放射率の相違によって測定温度が変動して正確な温度測定が困難であるという問題があった。例えば、全体をほぼ同温度に加熱した矩形金属板の温度分布を測定した場合、この金属板M(図8)の、黒色塗料を塗布した半面M1の熱画像(図9のX)と、金属板Mの、黒色塗料を塗布しない残る半面M2の熱画像(図9のY)とは、輝度によって変動する放射率の影響を受けてその色温度が大きく異なってしまう。
【0006】
そこで、本発明はこのような課題を解決するもので、放射率の影響を受けることなく正確な温度を知ることができる温度測定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本第1発明では、被測定物(B)の熱画像を得る第1撮像手段(1)と、前記被測定物(B)の可視画像を得る第2撮像手段(2)と、前記可視画像の必要部の輝度と当該必要部の放射率の関係を得る第1処理手段(3、ステップ201〜209)と、前記必要部に対応する前記熱画像の必要部から得られた温度を前記放射率で補正して補正温度を得る第2処理手段(3、ステップ101〜107)とを具備している。
【0008】
本第1発明においては、熱画像を得る第1撮像手段に加えて可視画像を得る第2撮像手段を設けて、第1処理手段にて可視画像の必要部の輝度から当該必要部の放射率を得て、この放射率によって熱画像の必要部から得られた温度を補正して補正温度を得ている。補正温度は放射率の影響を受けることのない正確な値となるから、補正温度を使用して正確な熱画像を描くことができる。
【0009】
本第2発明では、前記第1処理手段は、前記被測定物の複数点についてその実温度を取り込むとともに、これら複数点に対応する前記熱画像の温度を取り込んで、前記実温度と熱画像温度より前記複数点についての放射率を算出し、かつ前記複数点に対応する前記可視画像の複数点の輝度を取得して、近似式により前記必要部の輝度と当該必要部の放射率の関係を得るものである。この場合、実温度としては、例えば接触式温度計で被測定物を測定して得られる接触温度を使用することができる。
【0010】
本第3発明では、前記第1処理手段における輝度の取得は、前記可視画像をRGB空間からYCbCr空間へ変換してその輝度情報のみを得るものである。
【0011】
本第4発明では、前記第2撮像手段は可視光カメラであり、当該可視光カメラに偏光フィルタを装着する。偏光フィルタを使用すると散乱光の影響を受け難くなり、さらに良好な補正温度を得ることができる。
【発明の効果】
【0012】
以上のように、本発明の温度測定装置によれば、放射率の影響を受けることなく正確な温度を知ることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1実施形態における温度測定装置のブロック構成図である。
【図2】温度測定装置を構成するコンピュータにおける処理手順を示すフローチャートである。
【図3】輝度から放射率の逆数を算出するための近似式を得る手順を示すフローチャートである。
【図4】輝度と放射率の逆数の関係を近似する近似線を示すグラフである。
【図5】被測定物の補正前と補正後の温度測定結果を示すグラフである。
【図6】本発明の第2実施形態における、輝度と放射率の逆数の関係を近似する近似線を示すグラフである。
【図7】被測定物の補正前と補正後の温度測定結果を示すグラフである。
【図8】従来例を示す、被測定物たる金属板の正面図である。
【図9】従来例を示す、被測定物たる金属板の熱画像である。
【発明を実施するための形態】
【0014】
(第1実施形態)
図1には本発明の温度測定装置の全体構成を示す。温度測定装置は被測定物Bに向けて設置された、第1撮像手段としてのサーモカメラ1とこれと撮影画角が同一の第2撮像手段としての可視光カメラ2を備えている。サーモカメラ1で得られた熱画像と可視光カメラ2で得られた可視画像は処理手段としてのコンピュータ3に入力し、ここで両画像に対して以下に説明する処理がなされて、温度補正された熱画像がモニタ4上に表示される。
【0015】
図2にはコンピュータ3内での処理手順を示す。ステップ101ではサーモカメラ1で撮影された被測定物Bの熱画像を取り込む。ステップ102では可視光カメラで撮影された被測定物の可視画像を取り込み、ステップ103で、取り込んだ上記可視画像の画素数を熱画像の画素数に一致させるとともに両画像の位置合わせを行なう。普通は可視画像の画素数の方が多いため、例えば熱画像の画素に対応する領域の、可視画像の互いに隣接する各画素のRGBについてその平均値をとって、熱画像の画素に対応した新たな画素を生成することによって画素数を一致させる。両画像の位置合わせは例えば、画像を回転させたり、画像の形状特徴部を合致させたりして行なう。
【0016】
ステップ104では、ステップ103にて画素数を熱画像の画素数に一致させる等の処理を行なった可視画像についてこれを輝度でグレースケール化する。グレールスケール化は、下式(1)〜(3)によって可視画像をRGB空間からYCbCr空間へ変換し、このうち輝度(Y)情報のみを各画素に割り当てることによって行なう。
Y=0.29891R+0.58661G+0.11448B…(1)
Cb=-0.16874R−0.33126G+0.50000B…(2)
Cr=0.5000R−0.41869G−0.08131B…(3)
【0017】
ステップ105では、可視画像の各画素の輝度Yから、本実施形態では二次の近似式(4)を使用して各画素の放射率の逆数ε-1を計算する。この場合、放射率の逆数ε-1は理論的に1を下回らないから、計算結果が1を下回る場合には1に制限する。
【0018】
【数1】

ここで、a,b,cは定数である。
【0019】
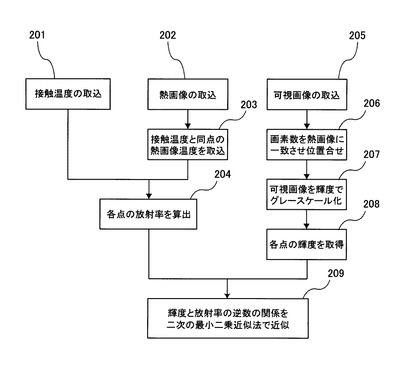
なお、上記近似式(4)は以下の手順によって予め決定されている。すなわち、図3において、ステップ201では被測定物の複数点を熱電対等の接触式温度計で測定しその接触温度を実温度として取り込む。ステップ202ではサーモカメラで撮影された被測定物の熱画像を取り込み、ステップ203で、上記複数点に対応する各点の熱画像温度を取得する。ステップ204では下式(5)より各点の放射率εを算出する。なお、実温度の測定は接触式温度センサ以外のものを使用することができる。
【0020】
【数2】
ここで、T1は接触温度(K),T2は熱画像温度(K),Taは周囲温度(K)である。
【0021】
一方、ステップ205では可視光カメラで撮影された被測定物の可視画像を取り込み、ステップ206で、取り込んだ可視画像の画素数を、既に説明したステップ103と同様の方法で熱画像の画素数に一致させるとともに両画像の位置合わせを行なう。続いてステップ207では既に説明したステップ103と同様の方法で可視画像を輝度でグレースケール化する。ステップ208では、放射率εを算出した上記各点での輝度Yをグレースケール画像より取得して、図4に示すように各点(白三角で示す)について輝度Yと放射率の逆数ε-1をプロットする。輝度Yと放射率の逆数ε-1の関係は、ステップ209にて、最小二乗法により上記近似式(4)の定数a,b,cを決定した二次曲線g(図4)によって近似される。このようにして近似式(4)が決定される。
【0022】
図2のステップ106では、ステップ105で演算された放射率の逆数ε-1を使用して下式(6)によって熱画像の各画素の温度T2を補正して、補正温度T0を得る。そして、ステップ107で、補正温度T0(絶対温度ないしセルシウス温度)による熱画像をモニタへ出力する。
【0023】
【数3】
ここで、T1は接触温度(K),T2は熱画像温度(K),Taは周囲温度(K)である。
【0024】
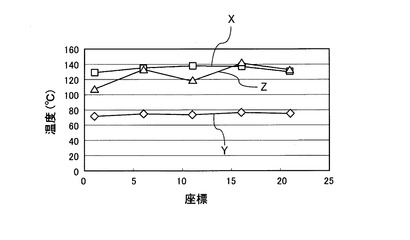
図5にはモニタへ出力された熱画像中の直線上に並ぶ画素について温度補正する前と温度補正した後の温度分布を示す。図5中の線xは接触温度分布であり、線yが補正前の熱画像温度分布、線zが補正後の熱画像温度分布である。図5によれば、補正前の熱画像温度は接触温度と大きく異なっている(平均40%程度の誤差)のに対して、補正後の熱画像温度は接触温度との差が十分小さくなっている(平均17%程度の誤差)。
【0025】
(第2実施形態)
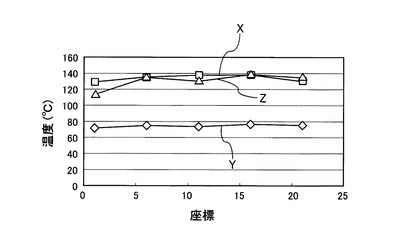
本実施形態では可視光カメラ2(図1)に偏光フィルタを装着する。偏光フィルタを装着した可視光カメラ2で得た可視画像を使用すると、上記ステップ208における輝度Yと放射率の逆数ε-1をプロットした各点(図6の白三角で示す)の関係は輝度Yの高い領域においても、最小二乗法により上記近似式(4)の定数a,b,cを決定した二次曲線h(図6)の近傍に集まり、高い相関を示す。そこで、近似式(4)を使用して上記ステップ105で各画素の放射率の逆数ε-1を計算し、上記ステップ106で各画素の温度T2を補正して補正温度T0を得て、上記ステップ107で補正温度T0による熱画像を得る。
【0026】
図7には得られた熱画像中の直線上に並ぶ画素について温度補正する前と温度補正した後の温度分布を示す。図7中の線xは接触温度分布であり、線yが補正前の熱画像温度分布、線zが補正後の熱画像温度分布である。図7によれば、補正前の熱画像温度は接触温度と大きく異なっている(平均40%程度の誤差)のに対して、補正後の熱画像温度は接触温度との差が第1実施形態におけるよりも、さらに十分小さくなっている(平均11%程度の誤差)。
【0027】
なお、上記各実施形態において、温度測定装置の出力は必ずしも熱画像にする必要はなく、被測定物の所望点の補正温度を得るだけにしても良い。
【符号の説明】
【0028】
1…サーモカメラ(第1撮像手段)、2…可視光カメラ(第2撮像手段)、3…コンピュータ(第1処理手段、第2処理手段)、4…モニタ。
【技術分野】
【0001】
本発明は温度測定装置に関し、特に、被測定物の放射率に左右されない正確な温度絶対値を得ることができる温度測定装置に関する。
【背景技術】
【0002】
被測定物の温度分布画像(熱画像)を得るために例えばサーモカメラが使用される。サーモカメラは、被測定物の各部から放射される赤外線のエネルギー量を遠隔的に測定して当該各部における温度を算出し、その温度分布を色分け表示した熱画像を得るものである。
【0003】
なお、特許文献1には、被測定物の表面を、黒色塗料を塗布した放射率の大きい第1表面と、黒色塗料を塗布しない放射率の小さい第2表面に区画し、第1表面で高温範囲を測定するとともに第2表面で低温範囲を測定することによって測定温度範囲を拡大した温度測定装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−220248
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、サーモカメラは上述のように被測定物の各部から放射される赤外線のエネルギー量を温度に換算するものであるため、上記各部の放射率の相違によって測定温度が変動して正確な温度測定が困難であるという問題があった。例えば、全体をほぼ同温度に加熱した矩形金属板の温度分布を測定した場合、この金属板M(図8)の、黒色塗料を塗布した半面M1の熱画像(図9のX)と、金属板Mの、黒色塗料を塗布しない残る半面M2の熱画像(図9のY)とは、輝度によって変動する放射率の影響を受けてその色温度が大きく異なってしまう。
【0006】
そこで、本発明はこのような課題を解決するもので、放射率の影響を受けることなく正確な温度を知ることができる温度測定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本第1発明では、被測定物(B)の熱画像を得る第1撮像手段(1)と、前記被測定物(B)の可視画像を得る第2撮像手段(2)と、前記可視画像の必要部の輝度と当該必要部の放射率の関係を得る第1処理手段(3、ステップ201〜209)と、前記必要部に対応する前記熱画像の必要部から得られた温度を前記放射率で補正して補正温度を得る第2処理手段(3、ステップ101〜107)とを具備している。
【0008】
本第1発明においては、熱画像を得る第1撮像手段に加えて可視画像を得る第2撮像手段を設けて、第1処理手段にて可視画像の必要部の輝度から当該必要部の放射率を得て、この放射率によって熱画像の必要部から得られた温度を補正して補正温度を得ている。補正温度は放射率の影響を受けることのない正確な値となるから、補正温度を使用して正確な熱画像を描くことができる。
【0009】
本第2発明では、前記第1処理手段は、前記被測定物の複数点についてその実温度を取り込むとともに、これら複数点に対応する前記熱画像の温度を取り込んで、前記実温度と熱画像温度より前記複数点についての放射率を算出し、かつ前記複数点に対応する前記可視画像の複数点の輝度を取得して、近似式により前記必要部の輝度と当該必要部の放射率の関係を得るものである。この場合、実温度としては、例えば接触式温度計で被測定物を測定して得られる接触温度を使用することができる。
【0010】
本第3発明では、前記第1処理手段における輝度の取得は、前記可視画像をRGB空間からYCbCr空間へ変換してその輝度情報のみを得るものである。
【0011】
本第4発明では、前記第2撮像手段は可視光カメラであり、当該可視光カメラに偏光フィルタを装着する。偏光フィルタを使用すると散乱光の影響を受け難くなり、さらに良好な補正温度を得ることができる。
【発明の効果】
【0012】
以上のように、本発明の温度測定装置によれば、放射率の影響を受けることなく正確な温度を知ることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1実施形態における温度測定装置のブロック構成図である。
【図2】温度測定装置を構成するコンピュータにおける処理手順を示すフローチャートである。
【図3】輝度から放射率の逆数を算出するための近似式を得る手順を示すフローチャートである。
【図4】輝度と放射率の逆数の関係を近似する近似線を示すグラフである。
【図5】被測定物の補正前と補正後の温度測定結果を示すグラフである。
【図6】本発明の第2実施形態における、輝度と放射率の逆数の関係を近似する近似線を示すグラフである。
【図7】被測定物の補正前と補正後の温度測定結果を示すグラフである。
【図8】従来例を示す、被測定物たる金属板の正面図である。
【図9】従来例を示す、被測定物たる金属板の熱画像である。
【発明を実施するための形態】
【0014】
(第1実施形態)
図1には本発明の温度測定装置の全体構成を示す。温度測定装置は被測定物Bに向けて設置された、第1撮像手段としてのサーモカメラ1とこれと撮影画角が同一の第2撮像手段としての可視光カメラ2を備えている。サーモカメラ1で得られた熱画像と可視光カメラ2で得られた可視画像は処理手段としてのコンピュータ3に入力し、ここで両画像に対して以下に説明する処理がなされて、温度補正された熱画像がモニタ4上に表示される。
【0015】
図2にはコンピュータ3内での処理手順を示す。ステップ101ではサーモカメラ1で撮影された被測定物Bの熱画像を取り込む。ステップ102では可視光カメラで撮影された被測定物の可視画像を取り込み、ステップ103で、取り込んだ上記可視画像の画素数を熱画像の画素数に一致させるとともに両画像の位置合わせを行なう。普通は可視画像の画素数の方が多いため、例えば熱画像の画素に対応する領域の、可視画像の互いに隣接する各画素のRGBについてその平均値をとって、熱画像の画素に対応した新たな画素を生成することによって画素数を一致させる。両画像の位置合わせは例えば、画像を回転させたり、画像の形状特徴部を合致させたりして行なう。
【0016】
ステップ104では、ステップ103にて画素数を熱画像の画素数に一致させる等の処理を行なった可視画像についてこれを輝度でグレースケール化する。グレールスケール化は、下式(1)〜(3)によって可視画像をRGB空間からYCbCr空間へ変換し、このうち輝度(Y)情報のみを各画素に割り当てることによって行なう。
Y=0.29891R+0.58661G+0.11448B…(1)
Cb=-0.16874R−0.33126G+0.50000B…(2)
Cr=0.5000R−0.41869G−0.08131B…(3)
【0017】
ステップ105では、可視画像の各画素の輝度Yから、本実施形態では二次の近似式(4)を使用して各画素の放射率の逆数ε-1を計算する。この場合、放射率の逆数ε-1は理論的に1を下回らないから、計算結果が1を下回る場合には1に制限する。
【0018】
【数1】
ここで、a,b,cは定数である。
【0019】
なお、上記近似式(4)は以下の手順によって予め決定されている。すなわち、図3において、ステップ201では被測定物の複数点を熱電対等の接触式温度計で測定しその接触温度を実温度として取り込む。ステップ202ではサーモカメラで撮影された被測定物の熱画像を取り込み、ステップ203で、上記複数点に対応する各点の熱画像温度を取得する。ステップ204では下式(5)より各点の放射率εを算出する。なお、実温度の測定は接触式温度センサ以外のものを使用することができる。
【0020】
【数2】
ここで、T1は接触温度(K),T2は熱画像温度(K),Taは周囲温度(K)である。
【0021】
一方、ステップ205では可視光カメラで撮影された被測定物の可視画像を取り込み、ステップ206で、取り込んだ可視画像の画素数を、既に説明したステップ103と同様の方法で熱画像の画素数に一致させるとともに両画像の位置合わせを行なう。続いてステップ207では既に説明したステップ103と同様の方法で可視画像を輝度でグレースケール化する。ステップ208では、放射率εを算出した上記各点での輝度Yをグレースケール画像より取得して、図4に示すように各点(白三角で示す)について輝度Yと放射率の逆数ε-1をプロットする。輝度Yと放射率の逆数ε-1の関係は、ステップ209にて、最小二乗法により上記近似式(4)の定数a,b,cを決定した二次曲線g(図4)によって近似される。このようにして近似式(4)が決定される。
【0022】
図2のステップ106では、ステップ105で演算された放射率の逆数ε-1を使用して下式(6)によって熱画像の各画素の温度T2を補正して、補正温度T0を得る。そして、ステップ107で、補正温度T0(絶対温度ないしセルシウス温度)による熱画像をモニタへ出力する。
【0023】
【数3】
ここで、T1は接触温度(K),T2は熱画像温度(K),Taは周囲温度(K)である。
【0024】
図5にはモニタへ出力された熱画像中の直線上に並ぶ画素について温度補正する前と温度補正した後の温度分布を示す。図5中の線xは接触温度分布であり、線yが補正前の熱画像温度分布、線zが補正後の熱画像温度分布である。図5によれば、補正前の熱画像温度は接触温度と大きく異なっている(平均40%程度の誤差)のに対して、補正後の熱画像温度は接触温度との差が十分小さくなっている(平均17%程度の誤差)。
【0025】
(第2実施形態)
本実施形態では可視光カメラ2(図1)に偏光フィルタを装着する。偏光フィルタを装着した可視光カメラ2で得た可視画像を使用すると、上記ステップ208における輝度Yと放射率の逆数ε-1をプロットした各点(図6の白三角で示す)の関係は輝度Yの高い領域においても、最小二乗法により上記近似式(4)の定数a,b,cを決定した二次曲線h(図6)の近傍に集まり、高い相関を示す。そこで、近似式(4)を使用して上記ステップ105で各画素の放射率の逆数ε-1を計算し、上記ステップ106で各画素の温度T2を補正して補正温度T0を得て、上記ステップ107で補正温度T0による熱画像を得る。
【0026】
図7には得られた熱画像中の直線上に並ぶ画素について温度補正する前と温度補正した後の温度分布を示す。図7中の線xは接触温度分布であり、線yが補正前の熱画像温度分布、線zが補正後の熱画像温度分布である。図7によれば、補正前の熱画像温度は接触温度と大きく異なっている(平均40%程度の誤差)のに対して、補正後の熱画像温度は接触温度との差が第1実施形態におけるよりも、さらに十分小さくなっている(平均11%程度の誤差)。
【0027】
なお、上記各実施形態において、温度測定装置の出力は必ずしも熱画像にする必要はなく、被測定物の所望点の補正温度を得るだけにしても良い。
【符号の説明】
【0028】
1…サーモカメラ(第1撮像手段)、2…可視光カメラ(第2撮像手段)、3…コンピュータ(第1処理手段、第2処理手段)、4…モニタ。
【特許請求の範囲】
【請求項1】
被測定物の熱画像を得る第1撮像手段と、前記被測定物の可視画像を得る第2撮像手段と、前記可視画像の必要部の輝度と当該必要部の放射率の関係を得る第1処理手段と、前記必要部に対応する前記熱画像の必要部から得られた温度を前記放射率で補正して補正温度を得る第2処理手段とを具備する温度測定装置。
【請求項2】
前記第1処理手段は、前記被測定物の複数点についてその実温度を取り込むとともに、これら複数点に対応する前記熱画像の温度を取り込んで、前記実温度と熱画像温度より前記複数点についての放射率を算出し、かつ前記複数点に対応する前記可視画像の複数点の輝度を取得して、近似式により前記必要部の輝度と当該必要部の放射率の関係を得るものである請求項1に記載の温度測定装置。
【請求項3】
前記第1処理手段における輝度の取得は、前記可視画像をRGB空間からYCbCr空間へ変換してその輝度情報のみを得るものである請求項1又は2に記載の温度測定装置。
【請求項4】
前記第2撮像手段は可視光カメラであり、当該可視光カメラに偏光フィルタを装着した請求項1又は2に記載の温度測定装置。
【請求項1】
被測定物の熱画像を得る第1撮像手段と、前記被測定物の可視画像を得る第2撮像手段と、前記可視画像の必要部の輝度と当該必要部の放射率の関係を得る第1処理手段と、前記必要部に対応する前記熱画像の必要部から得られた温度を前記放射率で補正して補正温度を得る第2処理手段とを具備する温度測定装置。
【請求項2】
前記第1処理手段は、前記被測定物の複数点についてその実温度を取り込むとともに、これら複数点に対応する前記熱画像の温度を取り込んで、前記実温度と熱画像温度より前記複数点についての放射率を算出し、かつ前記複数点に対応する前記可視画像の複数点の輝度を取得して、近似式により前記必要部の輝度と当該必要部の放射率の関係を得るものである請求項1に記載の温度測定装置。
【請求項3】
前記第1処理手段における輝度の取得は、前記可視画像をRGB空間からYCbCr空間へ変換してその輝度情報のみを得るものである請求項1又は2に記載の温度測定装置。
【請求項4】
前記第2撮像手段は可視光カメラであり、当該可視光カメラに偏光フィルタを装着した請求項1又は2に記載の温度測定装置。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】

【図7】
【図8】

【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−8058(P2012−8058A)
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2010−145756(P2010−145756)
【出願日】平成22年6月28日(2010.6.28)
【出願人】(591172054)株式会社明和eテック (24)
【Fターム(参考)】
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成22年6月28日(2010.6.28)
【出願人】(591172054)株式会社明和eテック (24)
【Fターム(参考)】
[ Back to top ]