
測位システム、測位方法及びカーナビゲーションシステム

【課題】受信可能なGPS衛星の数が十分でなくても移動体の位置を精度よく測位可能な測位システム、カーナビゲーションシステムを提供すること。
【解決手段】人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システム10において、捕捉された人工衛星が3未満の場合、電波を利用して測位された範囲から、自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を電波を利用して測位された衛星測位位置と推定することを特徴とする。
【解決手段】人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システム10において、捕捉された人工衛星が3未満の場合、電波を利用して測位された範囲から、自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を電波を利用して測位された衛星測位位置と推定することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS衛星等の複数の無線局からの電波を受信して、移動体の現在位置を推定する測位システム、測位方法及びカーナビゲーションシステムに関し、特に、十分な数の無線局からの電波を受信できない場合にも精度よく移動体の現在位置を推定できる測位システム、測位方法及びカーナビゲーションシステムに関する。
【背景技術】
【0002】
車両の走行位置や目的地までの走行経路をユーザに提供するため車両の走行位置を検出するGPS(Grobal Positioning System)装置が知られている。車載されたGPS装置は、GPS衛星から疑似ランダム符号で変調された搬送波を受信して、復調の過程で得られる搬送波の伝播時間に光速を乗じることでGPS衛星との距離を算出する。地球上の車両の位置は、緯度、経度及び標高(以下、単に座標という)の三次元空間において特定されるため、GPS装置は3つのGPS衛星から発信時刻情報を受信して、3つのGPS衛星と車両との距離を半径とする球体の交点を車両の座標として算出する。また、GPS衛星が保持する時計は極めて高い精度が保証されているが車両に搭載された時計は若干の誤差を含むため伝播時間も誤差を含むものとなり、GPS衛星との距離を正確に算出できない。そこで、GPS装置は4つめのGPS衛星を利用して時間誤差を補正しより精度よく自車両の位置を測位するように構成されている。
【0003】
しかしながら、GPS装置を自動車等の移動体に搭載した場合、ビルの陰等、4つ全てのGPS衛星から発信時刻情報を搬送する電波を受信できない場合がある。GPS衛星からの電波を受信できない場合、車載された測位システムでは、自律航法やマップマッチングにより現在位置を推定することができるが、GPS衛星からの電波が得られない状態が長時間にわたると、自律航法やマップマッチングによる位置推定に誤差が累積されることとなり、好ましくない。
【0004】
そこで、電波を受信できるGPS衛星が1つでもあっても車両の位置を測位する方法が提案されている(例えば、特許文献1参照。)。特許文献1では、まず、1つのGPS衛星から受信した電波に基づき、現在の自車両の位置を含むとされる円を算出する。また、自車両はジャイロセンサ等により進行方向の履歴を蓄積しているので、自車両の移動方向と円との交点を算出することで、現在位置を精度よく推定することを図っている。
【特許文献1】特開平8−75479号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、電波を受信できるGPS衛星が1つの場合、原理的に算出可能な位置は、GPS衛星から等距離となる所定の球面である。この場合、地球の表面位置が既知であれば、球面と地球表面とが交わる交線が得られ、自車両の移動方向との交点が自車両の位置として測位される。しかしながら、地球の表面には高低差(標高)があるため、特許文献1の方法による測位は、標高が既知でなければ又は標高を一定としなければ利用できない。標高が定まらなければ、緯度及び経度もずれるため、結果として精度のよい測位が困難である。
【0006】
本発明は、上記問題に鑑み、受信可能なGPS衛星の数が十分でなくても移動体の位置を精度よく測位可能な測位システム、カーナビゲーションシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題に鑑み、本発明は、人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システムにおいて、捕捉された人工衛星が3未満の場合、電波を利用して測位された範囲から、自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を電波を利用して測位された衛星測位位置と推定することを特徴とする。
【0008】
本発明によれば、慣性測位位置に最も近い位置を衛星測位位置として抽出するので、捕捉されるGPS衛星の数が十分でなくても自車両の位置を精度よく測位できる。
【0009】
また、本発明の一形態において、捕捉された人工衛星が1つの場合、範囲は、当該人工衛星から等距離な球面として規定され、捕捉された人工衛星が2つの場合、範囲は、当該2つの人工衛星から等距離な2つの球面がなす曲線として規定される、ことを特徴とする。
【0010】
本発明によれば、球面又は曲線上から衛星測位位置として抽出することができる。
【0011】
また、本発明の一形態において、衛星測位位置を自律航法による測位で補正して移動体の位置を推定する。
【0012】
本発明によれば、捕捉されるGPS衛星の数が十分でなくても、衛星測位位置を自律航法による測位で補正して移動体の位置を推定することができる。
【発明の効果】
【0013】
受信可能なGPS衛星の数が十分でなくても移動体の位置を精度よく測位可能な測位システム、カーナビゲーションシステムを提供することができる。
【発明を実施するための最良の形態】
【0014】
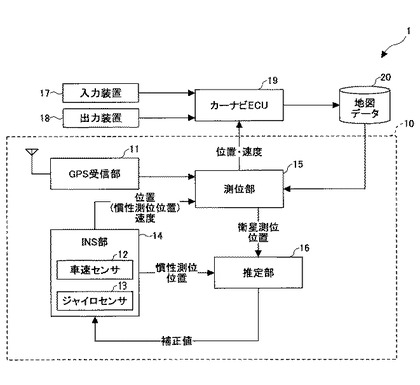
以下、本発明を実施するための最良の形態について図面を参照しながら説明する。図1は、本発明の測位システム10を適用したカーナビゲーションシステムの全体構成図を示す。カーナビゲーションシステム(以下、単にカーナビという)1は、測位システム10が測位した自車両の位置に基づき、自車両の位置を地図上に表示したり目的地までの経路を案内する等、乗員に種々のサービスを提供する。
【0015】
測位システム10は、GPS衛星からの電波を受信するGPS受信部11、自律航法により自車両の位置を推定するINS(Inertial Navigation Systems)部14、GPS衛星からの電波及び自律航法による測位に基づき自車両の位置を推定する測位部15、測位部15が推定した車両の位置の誤差を見積もり補正値を算出する推定部11、とを有する。 測位システム10は、GPS衛星から発信される電波を利用した測位とINS部14による測位とを協調制御して、最も確からしい自車両の位置を推定する。
【0016】
GPS衛星は、複数の軌道(例えば6個)に複数(例えば24個)配置され地球を周回している。GPS衛星のおおよその軌道は既知であり、また、航法メッセージとして受信されるエフェメリスにより詳細な軌道が取得できるので、GPS受信部11は、複数のGPS衛星のうち現在の車両の位置から所定の仰角に入るGPS衛星を好ましくは4つ以上選択し、それらのGPS衛星から発信される電波を受信する。
【0017】
GPS衛星が発信する電波は、波長1575.42MHzの搬送波L1を衛星毎に固定のC/Aコード(Coarse/Acquisition Code)により変調されて発信される。GPS受信部11は、選択したGPS衛星のC/Aコードを生成して、受信される電波の復調を試みる。C/Aコードは1又は0のビット列を繰り返しながら1023ビットで1つのコードを構成し、繰り返し搬送波L1を変調している。GPS受信部11は、生成したC/Aコードにより電波が復調されるように1023ビットの位相(1又は0のビット状態)を調整し、復調が可能な位相が決定されると当該GPS衛星を捕捉できたこととなる。
【0018】
GPS衛星の時計とGPS受信部11が保持する時計が完全に一致しているとすれば(実際にはGPS受信部11が保持する時計は誤差を有する)、GPS衛星で生成され搬送波L1を変調したC/Aコードの位相と、受信した電波を復調したC/Aコードの位相とは、電波の到達時間の分だけシフトしている。
【0019】
測位部15は、そのシフト分に基づき電波の到達時間を計算し、到達時間と光速cから捕捉したGPS衛星までの距離を算出する。図2は、車両とGPS衛星st1〜st4との関係を示す図である。
【0020】
測位部15は、捕捉されたGPS衛星の数だけ次のような連立方程式を立て、変数(X,Y,Z)について解くことで、自車両の緯度X、経度Y、標高Zを算出することができる(以下、GPS衛星により推定した座標を衛星測位座標という)。
【0021】
(X1、Y1、Z1)はGPS衛星1の座標、(X2、Y2、Z2)はGPS衛星2の座標、(X3、Y3、Z3)はGPS衛星3の座標であるが、各GPS衛星の位置はエフェメリスデータにより既知である。したがって、変数が3つなので、自車両の位置を算出するためには捕捉するGPS衛星が3つ以上必要である。連立方程式を解くことは、GPS衛星を中心とする3つの球の表面の交点を求めることになり、それがGPS衛星の電波から測位される自車両の座標となる。
GPS衛星st1までの距離ρ1
=√{(X1−X)2+(Y1−Y)2+(Z1−Z)2}
GPS衛星st2までの距離ρ2
=√{(X2−X)2+(Y2−Y)2+(Z2−Z)2}
GPS衛星st3までの距離ρ3
=√{(X3−X)2+(Y3−Y)2+(Z3−Z)2}
また、GPS受信部11の時計の誤差をΔtとすれば、各式に「c(光速)×Δt」を加えることで時計の誤差を補正した距離が算出されることとなる。この場合にはΔtを含め変数が4つになるので、捕捉するGPS衛星が4つ以上必要となる。
【0022】
なお、各GPS衛星との距離ρを時間で微分すれば、各GPS衛星に対する自車両の相対速度が求められので、これにより自車両の速度を取得することができる。また、自車両の速度は、搬送波L1のドップラー量に基づき算出してもよい。ドップラー量は自車両の速度とGPS衛星の速度の差に比例するので、GPS衛星の速度(既知)とドップラー量に基づき自車両の速度を算出できる。ドップラー量は搬送波の周波数のズレから算出できる。
【0023】
このように、GPS衛星による測位では測位されるGPS衛星が3つ以上あることが好ましいが、本実施の形態の測位システムは、捕捉可能なGPS衛星が2つ以下であっても、自車両の位置を精度よく推定することを可能とする。
【0024】
なお、上記の連立方程式により算出された位置座標はWGS(World Geodetic System)基準座標系による位置座標であるため、測位部15はこれを地球固定直交座標系に変換する。変換された後の車両の位置を、衛星測位位置と称す。
【0025】
さて、測位部15には、INS部14が有する車速センサ12及びジャイロセンサ13が接続されている。車速センサ12は、例えば、各輪に備えられたロータの円周上に定間隔で設置された凸部が通過する際の磁束の変化をパルスとして計測して、単位時間あたりのパルス数に基づき各輪毎に車速を計測する。
【0026】
また、ジャイロセンサ13は、光ファイバージャイロ、震動片型ジャイロ等のヨーレートセンサであり、自車両が回転する時の角速度を検知して検知結果を積分することで角度、すなわち進行方向に変換できる。3次元上の方向を推定するためにジャイロセンサ13は3軸方向の進行方向が検出可能であることが望ましい。
【0027】
測位部15は、衛星測位位置に、車速センサ12による走行距離及びジャイロセンサ13による走行方向を累積しながら自律航法により車両の現在位置を精度よく推定する(以下、自律航法により推定した位置を慣性測位位置という)。
【0028】
したがって、測位部15は、仮に、GPS衛星が全く捕捉されなくてもINS14の検出する車速や進行方向を用いて自律航法により自車両の位置を推定できる。
【0029】
また、推定部16は衛星測位位置及び慣性測位位置を入力され、それらの値及び過去に検出された値に基づきそれぞれが含む誤差を見積もると共に、慣性測位位置の補正値を算出する。慣性測位位置について算出された補正値はINS部14に入力され、INS部14は補正値により補正した慣性測位位置を測位部15に出力する。
【0030】
推定部16は、例えばカルマンフィルタにより慣性測位位置の補正値を算出する。カルマンフィルタは、雑音を含む観測値から真の値に最適な推定値を求めるフィルタ(アルゴリズム)である。カルマンフィルタは、次々に入力される慣性測位位置に所定の処理を施して得られる推定値の誤差の二乗平均を最小化するように補正値を算出する。このようにして、測位部15は、INS14により検出した慣性測位位置が含む誤差を高精度に補正できる。
【0031】
なお、推定部16には衛星測位位置も入力されるため、衛星測位位置に基づき慣性測位位置が含む誤差を推定してもよい。この場合、4つ以上のGPS衛星が捕捉されている状態があれば、その時の衛星測位位置に大気の状態や仰角による補正を施し、INS14により測位された慣性測位位置が有する誤差の推定に算入させることができる。
【0032】
ここで、推定部16は衛星測位位置の誤差を推定しない、又は、仮に推定しても衛星測位位置の補正値を測位部15に入力しない点も、本実施の形態の特徴である。カルマンフィルタは、過去の計測値の傾向を元に誤差を推定するものなので、瞬時測位である衛星測位位置に適用することは好適でない。例えば、GPS衛星からの電波がマルチパス等により大きく変位した場合、カルマンフィルタはその後長時間にわたって誤差の大きな衛星測位位置を使用して補正値を算出することになるので、衛星測位位置についてはカルマンフィルタにより補正しない方が精度が確保されやすい。
【0033】
これに対し、GPS衛星が3つ以上捕捉されている場合には、GPS受信部11が有する時計の誤差は残るものの(3つの場合)、GPS衛星により車両の三次元空間における衛星測位位置が取得され、これをINS部14による自律航法により補正すれば高精度に自車両の位置を推定できる。
【0034】
しかしながら、捕捉されたGPS衛星が2つ以下の場合、GPS衛星との距離により規定される位置は広範囲になる。図3(a)は、GPS衛星が1つの場合に規定される位置の範囲を、図3(b)はGPS衛星が2つの場合に規定される位置の範囲を、それぞれ示す。GPS衛星が1つの場合、GPS衛星から等距離な位置の軌跡は球になるため、自車両の位置は球上のいずれかとしか特定できない。また、GPS衛星が2つの場合、2つのGPS衛星から等距離な位置の軌跡は、2つのGPS衛星を中心とする球が交差する曲線となるため、自車両の位置は曲線上のいずれかとしか特定できない。
【0035】
本実施の形態の測位システム10は、捕捉されたGPS衛星が3未満の場合、衛星測位位置(球又は曲線)から、自律航法により測位された慣性測位位置が最も近くなる地点を衛星測位位置とすることで、衛星測位位置をある1つの地点に特定することができる。
【0036】
図1に戻り、カーナビECU19は、このようにして推定された自車両の位置に基づき地図データ20から道路地図を抽出し、出力装置18に表示する。出力装置18は、液晶や有機EL、HUD(Head Up Display)等である。また、出力装置18はスピーカと接続されており、カーナビECU19はスピーカにより案内する交差点などの進行方向を音声により出力する。
【0037】
入力装置17は、押下式のキーボード、ボタン、リモコン、十字キー、タッチパネル等で構成され、運転者からの操作を入力するためのインターフェイスである。また、マイクを備え運転者の発する音声を音声認識回路で認識して操作を入力してもよい。目的地までのルート検索を行う場合、運転者は目的地を住所、地名、ランドマーク名、郵便番号等で入力することができる。
【0038】
また、カーナビゲーションシステム1は、テレビ及びラジオの受信装置やDVD等のメディアを再生するメディアプレーヤを装備しており、これらは入力装置17により操作される。
【0039】
また、地図データ20は、ハードディスクやCD−ROM、DVD−ROM等で構成され、道路網や交差点などの道路地図情報が、緯度・経度に対応づけて格納されている。地図データ20は、実際の道路網に対応して、ノード(道路と道路が交差する点、すなわち交差点)に関係する情報と、リンク(ノードとノードを接続する道路)に関係する情報とからなるテーブル状のデータベースに格納される。
【0040】
ノードテーブルは、ノードの番号、座標、そのノードから流出するリンク数及びそれらのリンク番号を有する。また、リンクテーブルは、リンクの番号、リンクを構成する始点ノードと終点ノード、リンク長を有する。ノード番号及びリンク番号は、互いに重複しないように定められている。したがって、ノード番号とリンク番号をそれぞれ辿ることで道路網が形成される。
【0041】
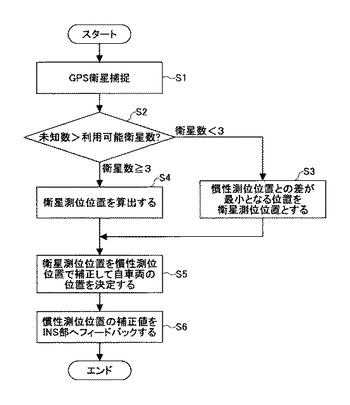
測位システム10による自車両の位置の推定手順について図4のフローチャート図に基づき説明する。まず、GPS受信部11がGPS衛星を捕捉する(S1)。捕捉されなければ、INS14による自律航法を継続する。
【0042】
GPS衛星が捕捉されたら、測位部15は捕捉されたGPS衛星の数が、上記の連立方程式により自車両の位置を算出するために必要な未知数の数より多いか否かを判定する(S2)。必要な未知数の数は、上述したように、時計の誤差まで補正するためには4つであり、時計の誤差を別の方法で補正するような場合は3つとなる。本実施の形態では未知数を3つとすることとして、捕捉されたGPS衛星が2つ以下の場合には、ステップS3の処理を、3つ以上の場合にはステップS4の処理を行う。
【0043】
捕捉されたGPS衛星の数が3つ以上の場合、測位部15は3つ以上のGPS衛星との距離に基づき衛星測位位置を算出する(S4)。
【0044】
また、捕捉されたGPS衛星の数が3つ未満の場合、測位部15は、INS14により算出された慣性測位位置との距離が最小となる位置を、図3(a)又は(b)に示す球面又は曲線から抽出し、その位置を衛星測位位置とする(S3)。
【0045】
ついで、測位部15は、通常の測位と同様に、衛星測位位置を慣性測位位置により補正して自車両の位置を推定する(S5)。なお、さらに、地図データ20の道路地図に、推定した自車両の位置を対応づけるマップマッチング法により位置を高精度に決定してもよい。決定された車両の位置は、カーナビECU19に送出される。
【0046】
また、推定部16は、慣性測位位置に基づき慣性測位位置の真値を推定し、その補正値をINS14にフィードバックする(S6)。
【0047】
本実施の形態の測位システムによれば、GPS衛星が3つ未満の場合、球又は曲線としか規定されない衛星測位位置から、慣性測位位置に最も近い位置を衛星測位位置として抽出し、この衛星測位位置を自律航法により補正して自車両の位置を推定するため、捕捉されるGPS衛星の数が1又は2であっても精度よく自車両の位置を推定できる。また、本実施の形態では、推定部16により慣性測位位置の誤差を補正しているため、慣性測位位置から最も近い位置として抽出される衛星測位位置も精度が保たれる。
【0048】
また、本実施の形態では車両を対象に説明したが、船や航空機などのその他の移動体の位置を推定する場合にも適用できる。また、無線局としてGPS衛星を用いたが、無線局は地上に設置されていてもよい。
【図面の簡単な説明】
【0049】
【図1】測位システムを適用したカーナビゲーションシステムの全体構成図である。
【図2】車両とGPS衛星st1〜st4との関係を示す図である。
【図3】捕捉されたGPS衛星の数が1つ又は2つの場合に測位により規定される範囲を示す図である。
【図4】測位システムによる自車両の位置の推定手順を示すフローチャート図である。
【符号の説明】
【0050】
1 カーナビゲーションシステム
10 測位システム
11 GPS受信部
12 車速センサ
13 ジャイロセンサ
14 INS部
15 測位部
16 推定部
17 入力装置
18 出力装置
19 カーナビECU
20 地図データ
【技術分野】
【0001】
本発明は、GPS衛星等の複数の無線局からの電波を受信して、移動体の現在位置を推定する測位システム、測位方法及びカーナビゲーションシステムに関し、特に、十分な数の無線局からの電波を受信できない場合にも精度よく移動体の現在位置を推定できる測位システム、測位方法及びカーナビゲーションシステムに関する。
【背景技術】
【0002】
車両の走行位置や目的地までの走行経路をユーザに提供するため車両の走行位置を検出するGPS(Grobal Positioning System)装置が知られている。車載されたGPS装置は、GPS衛星から疑似ランダム符号で変調された搬送波を受信して、復調の過程で得られる搬送波の伝播時間に光速を乗じることでGPS衛星との距離を算出する。地球上の車両の位置は、緯度、経度及び標高(以下、単に座標という)の三次元空間において特定されるため、GPS装置は3つのGPS衛星から発信時刻情報を受信して、3つのGPS衛星と車両との距離を半径とする球体の交点を車両の座標として算出する。また、GPS衛星が保持する時計は極めて高い精度が保証されているが車両に搭載された時計は若干の誤差を含むため伝播時間も誤差を含むものとなり、GPS衛星との距離を正確に算出できない。そこで、GPS装置は4つめのGPS衛星を利用して時間誤差を補正しより精度よく自車両の位置を測位するように構成されている。
【0003】
しかしながら、GPS装置を自動車等の移動体に搭載した場合、ビルの陰等、4つ全てのGPS衛星から発信時刻情報を搬送する電波を受信できない場合がある。GPS衛星からの電波を受信できない場合、車載された測位システムでは、自律航法やマップマッチングにより現在位置を推定することができるが、GPS衛星からの電波が得られない状態が長時間にわたると、自律航法やマップマッチングによる位置推定に誤差が累積されることとなり、好ましくない。
【0004】
そこで、電波を受信できるGPS衛星が1つでもあっても車両の位置を測位する方法が提案されている(例えば、特許文献1参照。)。特許文献1では、まず、1つのGPS衛星から受信した電波に基づき、現在の自車両の位置を含むとされる円を算出する。また、自車両はジャイロセンサ等により進行方向の履歴を蓄積しているので、自車両の移動方向と円との交点を算出することで、現在位置を精度よく推定することを図っている。
【特許文献1】特開平8−75479号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、電波を受信できるGPS衛星が1つの場合、原理的に算出可能な位置は、GPS衛星から等距離となる所定の球面である。この場合、地球の表面位置が既知であれば、球面と地球表面とが交わる交線が得られ、自車両の移動方向との交点が自車両の位置として測位される。しかしながら、地球の表面には高低差(標高)があるため、特許文献1の方法による測位は、標高が既知でなければ又は標高を一定としなければ利用できない。標高が定まらなければ、緯度及び経度もずれるため、結果として精度のよい測位が困難である。
【0006】
本発明は、上記問題に鑑み、受信可能なGPS衛星の数が十分でなくても移動体の位置を精度よく測位可能な測位システム、カーナビゲーションシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題に鑑み、本発明は、人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システムにおいて、捕捉された人工衛星が3未満の場合、電波を利用して測位された範囲から、自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を電波を利用して測位された衛星測位位置と推定することを特徴とする。
【0008】
本発明によれば、慣性測位位置に最も近い位置を衛星測位位置として抽出するので、捕捉されるGPS衛星の数が十分でなくても自車両の位置を精度よく測位できる。
【0009】
また、本発明の一形態において、捕捉された人工衛星が1つの場合、範囲は、当該人工衛星から等距離な球面として規定され、捕捉された人工衛星が2つの場合、範囲は、当該2つの人工衛星から等距離な2つの球面がなす曲線として規定される、ことを特徴とする。
【0010】
本発明によれば、球面又は曲線上から衛星測位位置として抽出することができる。
【0011】
また、本発明の一形態において、衛星測位位置を自律航法による測位で補正して移動体の位置を推定する。
【0012】
本発明によれば、捕捉されるGPS衛星の数が十分でなくても、衛星測位位置を自律航法による測位で補正して移動体の位置を推定することができる。
【発明の効果】
【0013】
受信可能なGPS衛星の数が十分でなくても移動体の位置を精度よく測位可能な測位システム、カーナビゲーションシステムを提供することができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明を実施するための最良の形態について図面を参照しながら説明する。図1は、本発明の測位システム10を適用したカーナビゲーションシステムの全体構成図を示す。カーナビゲーションシステム(以下、単にカーナビという)1は、測位システム10が測位した自車両の位置に基づき、自車両の位置を地図上に表示したり目的地までの経路を案内する等、乗員に種々のサービスを提供する。
【0015】
測位システム10は、GPS衛星からの電波を受信するGPS受信部11、自律航法により自車両の位置を推定するINS(Inertial Navigation Systems)部14、GPS衛星からの電波及び自律航法による測位に基づき自車両の位置を推定する測位部15、測位部15が推定した車両の位置の誤差を見積もり補正値を算出する推定部11、とを有する。 測位システム10は、GPS衛星から発信される電波を利用した測位とINS部14による測位とを協調制御して、最も確からしい自車両の位置を推定する。
【0016】
GPS衛星は、複数の軌道(例えば6個)に複数(例えば24個)配置され地球を周回している。GPS衛星のおおよその軌道は既知であり、また、航法メッセージとして受信されるエフェメリスにより詳細な軌道が取得できるので、GPS受信部11は、複数のGPS衛星のうち現在の車両の位置から所定の仰角に入るGPS衛星を好ましくは4つ以上選択し、それらのGPS衛星から発信される電波を受信する。
【0017】
GPS衛星が発信する電波は、波長1575.42MHzの搬送波L1を衛星毎に固定のC/Aコード(Coarse/Acquisition Code)により変調されて発信される。GPS受信部11は、選択したGPS衛星のC/Aコードを生成して、受信される電波の復調を試みる。C/Aコードは1又は0のビット列を繰り返しながら1023ビットで1つのコードを構成し、繰り返し搬送波L1を変調している。GPS受信部11は、生成したC/Aコードにより電波が復調されるように1023ビットの位相(1又は0のビット状態)を調整し、復調が可能な位相が決定されると当該GPS衛星を捕捉できたこととなる。
【0018】
GPS衛星の時計とGPS受信部11が保持する時計が完全に一致しているとすれば(実際にはGPS受信部11が保持する時計は誤差を有する)、GPS衛星で生成され搬送波L1を変調したC/Aコードの位相と、受信した電波を復調したC/Aコードの位相とは、電波の到達時間の分だけシフトしている。
【0019】
測位部15は、そのシフト分に基づき電波の到達時間を計算し、到達時間と光速cから捕捉したGPS衛星までの距離を算出する。図2は、車両とGPS衛星st1〜st4との関係を示す図である。
【0020】
測位部15は、捕捉されたGPS衛星の数だけ次のような連立方程式を立て、変数(X,Y,Z)について解くことで、自車両の緯度X、経度Y、標高Zを算出することができる(以下、GPS衛星により推定した座標を衛星測位座標という)。
【0021】
(X1、Y1、Z1)はGPS衛星1の座標、(X2、Y2、Z2)はGPS衛星2の座標、(X3、Y3、Z3)はGPS衛星3の座標であるが、各GPS衛星の位置はエフェメリスデータにより既知である。したがって、変数が3つなので、自車両の位置を算出するためには捕捉するGPS衛星が3つ以上必要である。連立方程式を解くことは、GPS衛星を中心とする3つの球の表面の交点を求めることになり、それがGPS衛星の電波から測位される自車両の座標となる。
GPS衛星st1までの距離ρ1
=√{(X1−X)2+(Y1−Y)2+(Z1−Z)2}
GPS衛星st2までの距離ρ2
=√{(X2−X)2+(Y2−Y)2+(Z2−Z)2}
GPS衛星st3までの距離ρ3
=√{(X3−X)2+(Y3−Y)2+(Z3−Z)2}
また、GPS受信部11の時計の誤差をΔtとすれば、各式に「c(光速)×Δt」を加えることで時計の誤差を補正した距離が算出されることとなる。この場合にはΔtを含め変数が4つになるので、捕捉するGPS衛星が4つ以上必要となる。
【0022】
なお、各GPS衛星との距離ρを時間で微分すれば、各GPS衛星に対する自車両の相対速度が求められので、これにより自車両の速度を取得することができる。また、自車両の速度は、搬送波L1のドップラー量に基づき算出してもよい。ドップラー量は自車両の速度とGPS衛星の速度の差に比例するので、GPS衛星の速度(既知)とドップラー量に基づき自車両の速度を算出できる。ドップラー量は搬送波の周波数のズレから算出できる。
【0023】
このように、GPS衛星による測位では測位されるGPS衛星が3つ以上あることが好ましいが、本実施の形態の測位システムは、捕捉可能なGPS衛星が2つ以下であっても、自車両の位置を精度よく推定することを可能とする。
【0024】
なお、上記の連立方程式により算出された位置座標はWGS(World Geodetic System)基準座標系による位置座標であるため、測位部15はこれを地球固定直交座標系に変換する。変換された後の車両の位置を、衛星測位位置と称す。
【0025】
さて、測位部15には、INS部14が有する車速センサ12及びジャイロセンサ13が接続されている。車速センサ12は、例えば、各輪に備えられたロータの円周上に定間隔で設置された凸部が通過する際の磁束の変化をパルスとして計測して、単位時間あたりのパルス数に基づき各輪毎に車速を計測する。
【0026】
また、ジャイロセンサ13は、光ファイバージャイロ、震動片型ジャイロ等のヨーレートセンサであり、自車両が回転する時の角速度を検知して検知結果を積分することで角度、すなわち進行方向に変換できる。3次元上の方向を推定するためにジャイロセンサ13は3軸方向の進行方向が検出可能であることが望ましい。
【0027】
測位部15は、衛星測位位置に、車速センサ12による走行距離及びジャイロセンサ13による走行方向を累積しながら自律航法により車両の現在位置を精度よく推定する(以下、自律航法により推定した位置を慣性測位位置という)。
【0028】
したがって、測位部15は、仮に、GPS衛星が全く捕捉されなくてもINS14の検出する車速や進行方向を用いて自律航法により自車両の位置を推定できる。
【0029】
また、推定部16は衛星測位位置及び慣性測位位置を入力され、それらの値及び過去に検出された値に基づきそれぞれが含む誤差を見積もると共に、慣性測位位置の補正値を算出する。慣性測位位置について算出された補正値はINS部14に入力され、INS部14は補正値により補正した慣性測位位置を測位部15に出力する。
【0030】
推定部16は、例えばカルマンフィルタにより慣性測位位置の補正値を算出する。カルマンフィルタは、雑音を含む観測値から真の値に最適な推定値を求めるフィルタ(アルゴリズム)である。カルマンフィルタは、次々に入力される慣性測位位置に所定の処理を施して得られる推定値の誤差の二乗平均を最小化するように補正値を算出する。このようにして、測位部15は、INS14により検出した慣性測位位置が含む誤差を高精度に補正できる。
【0031】
なお、推定部16には衛星測位位置も入力されるため、衛星測位位置に基づき慣性測位位置が含む誤差を推定してもよい。この場合、4つ以上のGPS衛星が捕捉されている状態があれば、その時の衛星測位位置に大気の状態や仰角による補正を施し、INS14により測位された慣性測位位置が有する誤差の推定に算入させることができる。
【0032】
ここで、推定部16は衛星測位位置の誤差を推定しない、又は、仮に推定しても衛星測位位置の補正値を測位部15に入力しない点も、本実施の形態の特徴である。カルマンフィルタは、過去の計測値の傾向を元に誤差を推定するものなので、瞬時測位である衛星測位位置に適用することは好適でない。例えば、GPS衛星からの電波がマルチパス等により大きく変位した場合、カルマンフィルタはその後長時間にわたって誤差の大きな衛星測位位置を使用して補正値を算出することになるので、衛星測位位置についてはカルマンフィルタにより補正しない方が精度が確保されやすい。
【0033】
これに対し、GPS衛星が3つ以上捕捉されている場合には、GPS受信部11が有する時計の誤差は残るものの(3つの場合)、GPS衛星により車両の三次元空間における衛星測位位置が取得され、これをINS部14による自律航法により補正すれば高精度に自車両の位置を推定できる。
【0034】
しかしながら、捕捉されたGPS衛星が2つ以下の場合、GPS衛星との距離により規定される位置は広範囲になる。図3(a)は、GPS衛星が1つの場合に規定される位置の範囲を、図3(b)はGPS衛星が2つの場合に規定される位置の範囲を、それぞれ示す。GPS衛星が1つの場合、GPS衛星から等距離な位置の軌跡は球になるため、自車両の位置は球上のいずれかとしか特定できない。また、GPS衛星が2つの場合、2つのGPS衛星から等距離な位置の軌跡は、2つのGPS衛星を中心とする球が交差する曲線となるため、自車両の位置は曲線上のいずれかとしか特定できない。
【0035】
本実施の形態の測位システム10は、捕捉されたGPS衛星が3未満の場合、衛星測位位置(球又は曲線)から、自律航法により測位された慣性測位位置が最も近くなる地点を衛星測位位置とすることで、衛星測位位置をある1つの地点に特定することができる。
【0036】
図1に戻り、カーナビECU19は、このようにして推定された自車両の位置に基づき地図データ20から道路地図を抽出し、出力装置18に表示する。出力装置18は、液晶や有機EL、HUD(Head Up Display)等である。また、出力装置18はスピーカと接続されており、カーナビECU19はスピーカにより案内する交差点などの進行方向を音声により出力する。
【0037】
入力装置17は、押下式のキーボード、ボタン、リモコン、十字キー、タッチパネル等で構成され、運転者からの操作を入力するためのインターフェイスである。また、マイクを備え運転者の発する音声を音声認識回路で認識して操作を入力してもよい。目的地までのルート検索を行う場合、運転者は目的地を住所、地名、ランドマーク名、郵便番号等で入力することができる。
【0038】
また、カーナビゲーションシステム1は、テレビ及びラジオの受信装置やDVD等のメディアを再生するメディアプレーヤを装備しており、これらは入力装置17により操作される。
【0039】
また、地図データ20は、ハードディスクやCD−ROM、DVD−ROM等で構成され、道路網や交差点などの道路地図情報が、緯度・経度に対応づけて格納されている。地図データ20は、実際の道路網に対応して、ノード(道路と道路が交差する点、すなわち交差点)に関係する情報と、リンク(ノードとノードを接続する道路)に関係する情報とからなるテーブル状のデータベースに格納される。
【0040】
ノードテーブルは、ノードの番号、座標、そのノードから流出するリンク数及びそれらのリンク番号を有する。また、リンクテーブルは、リンクの番号、リンクを構成する始点ノードと終点ノード、リンク長を有する。ノード番号及びリンク番号は、互いに重複しないように定められている。したがって、ノード番号とリンク番号をそれぞれ辿ることで道路網が形成される。
【0041】
測位システム10による自車両の位置の推定手順について図4のフローチャート図に基づき説明する。まず、GPS受信部11がGPS衛星を捕捉する(S1)。捕捉されなければ、INS14による自律航法を継続する。
【0042】
GPS衛星が捕捉されたら、測位部15は捕捉されたGPS衛星の数が、上記の連立方程式により自車両の位置を算出するために必要な未知数の数より多いか否かを判定する(S2)。必要な未知数の数は、上述したように、時計の誤差まで補正するためには4つであり、時計の誤差を別の方法で補正するような場合は3つとなる。本実施の形態では未知数を3つとすることとして、捕捉されたGPS衛星が2つ以下の場合には、ステップS3の処理を、3つ以上の場合にはステップS4の処理を行う。
【0043】
捕捉されたGPS衛星の数が3つ以上の場合、測位部15は3つ以上のGPS衛星との距離に基づき衛星測位位置を算出する(S4)。
【0044】
また、捕捉されたGPS衛星の数が3つ未満の場合、測位部15は、INS14により算出された慣性測位位置との距離が最小となる位置を、図3(a)又は(b)に示す球面又は曲線から抽出し、その位置を衛星測位位置とする(S3)。
【0045】
ついで、測位部15は、通常の測位と同様に、衛星測位位置を慣性測位位置により補正して自車両の位置を推定する(S5)。なお、さらに、地図データ20の道路地図に、推定した自車両の位置を対応づけるマップマッチング法により位置を高精度に決定してもよい。決定された車両の位置は、カーナビECU19に送出される。
【0046】
また、推定部16は、慣性測位位置に基づき慣性測位位置の真値を推定し、その補正値をINS14にフィードバックする(S6)。
【0047】
本実施の形態の測位システムによれば、GPS衛星が3つ未満の場合、球又は曲線としか規定されない衛星測位位置から、慣性測位位置に最も近い位置を衛星測位位置として抽出し、この衛星測位位置を自律航法により補正して自車両の位置を推定するため、捕捉されるGPS衛星の数が1又は2であっても精度よく自車両の位置を推定できる。また、本実施の形態では、推定部16により慣性測位位置の誤差を補正しているため、慣性測位位置から最も近い位置として抽出される衛星測位位置も精度が保たれる。
【0048】
また、本実施の形態では車両を対象に説明したが、船や航空機などのその他の移動体の位置を推定する場合にも適用できる。また、無線局としてGPS衛星を用いたが、無線局は地上に設置されていてもよい。
【図面の簡単な説明】
【0049】
【図1】測位システムを適用したカーナビゲーションシステムの全体構成図である。
【図2】車両とGPS衛星st1〜st4との関係を示す図である。
【図3】捕捉されたGPS衛星の数が1つ又は2つの場合に測位により規定される範囲を示す図である。
【図4】測位システムによる自車両の位置の推定手順を示すフローチャート図である。
【符号の説明】
【0050】
1 カーナビゲーションシステム
10 測位システム
11 GPS受信部
12 車速センサ
13 ジャイロセンサ
14 INS部
15 測位部
16 推定部
17 入力装置
18 出力装置
19 カーナビECU
20 地図データ
【特許請求の範囲】
【請求項1】
人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システムにおいて、
捕捉された前記人工衛星が3未満の場合、前記電波を利用して測位された範囲から、前記自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を前記電波を利用して測位された衛星測位位置と推定する、
ことを特徴とする測位システム。
【請求項2】
捕捉された前記人工衛星が1つの場合、前記範囲は、当該人工衛星から等距離な球面として規定され、
捕捉された前記人工衛星が2つの場合、前記範囲は、当該2つの人工衛星から等距離な2つの球面がなす曲線として規定される、
ことを特徴とする請求項1記載の測位システム。
【請求項3】
前記衛星測位位置を前記自律航法による測位で補正して前記移動体の位置を推定する、ことを特徴とする請求項1記載の測位システム。
【請求項4】
人工衛星から発信される電波を利用した測位と自律航法による測位と協調制御して、位置を推定する測位方法において、
捕捉された前記人工衛星が3未満の場合、電波を利用して測位された範囲から、前記自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を前記電波を利用して測位された衛星測位位置と推定する、
ことを特徴とする測位方法。
【請求項5】
請求項1〜3いずれか記載の測位システムにより推定された車両の前記位置を含む道路地図を表示可能なカーナビゲーションシステム。
【請求項1】
人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システムにおいて、
捕捉された前記人工衛星が3未満の場合、前記電波を利用して測位された範囲から、前記自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を前記電波を利用して測位された衛星測位位置と推定する、
ことを特徴とする測位システム。
【請求項2】
捕捉された前記人工衛星が1つの場合、前記範囲は、当該人工衛星から等距離な球面として規定され、
捕捉された前記人工衛星が2つの場合、前記範囲は、当該2つの人工衛星から等距離な2つの球面がなす曲線として規定される、
ことを特徴とする請求項1記載の測位システム。
【請求項3】
前記衛星測位位置を前記自律航法による測位で補正して前記移動体の位置を推定する、ことを特徴とする請求項1記載の測位システム。
【請求項4】
人工衛星から発信される電波を利用した測位と自律航法による測位と協調制御して、位置を推定する測位方法において、
捕捉された前記人工衛星が3未満の場合、電波を利用して測位された範囲から、前記自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を前記電波を利用して測位された衛星測位位置と推定する、
ことを特徴とする測位方法。
【請求項5】
請求項1〜3いずれか記載の測位システムにより推定された車両の前記位置を含む道路地図を表示可能なカーナビゲーションシステム。
【図1】


【図2】

【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−218865(P2007−218865A)
【公開日】平成19年8月30日(2007.8.30)
【国際特許分類】
【出願番号】特願2006−42826(P2006−42826)
【出願日】平成18年2月20日(2006.2.20)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成19年8月30日(2007.8.30)
【国際特許分類】
【出願日】平成18年2月20日(2006.2.20)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]