
測位システム、測位方法
【課題】慣性センサーデータとGPS測位データとを融合した高精度な測位方法を実現する。
【解決手段】測位方法は、慣性センサーデータとGPS測位データとを融合して移動体を測位する測位方法であって、慣性センサーデータに基づき、乗算型クォータニオン誤差モデルを用いる拡張カルマンフィルターの時間更新を行う工程と、GPS測位データに基づき、拡張カルマンフィルターの観測更新を行い、位置誤差・速度誤差・方位角誤差、及びジャイロバイアス誤差・加速度バイアス誤差を推定する工程と、推定された位置誤差・速度誤差・方位角誤差・ジャイロバイアス誤差・加速度バイアス誤差に基づき、位置・速度・姿勢の各誤差を補正する工程と、を有する。
【解決手段】測位方法は、慣性センサーデータとGPS測位データとを融合して移動体を測位する測位方法であって、慣性センサーデータに基づき、乗算型クォータニオン誤差モデルを用いる拡張カルマンフィルターの時間更新を行う工程と、GPS測位データに基づき、拡張カルマンフィルターの観測更新を行い、位置誤差・速度誤差・方位角誤差、及びジャイロバイアス誤差・加速度バイアス誤差を推定する工程と、推定された位置誤差・速度誤差・方位角誤差・ジャイロバイアス誤差・加速度バイアス誤差に基づき、位置・速度・姿勢の各誤差を補正する工程と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測位システム、及び測位方法に関する。
【背景技術】
【0002】
屋内やトンネル等、測位データが得にくい場所では、慣性航法データと測位データとを融合させることによって、屋内外を問わず、移動体の位置、速度、姿勢等の高精度な測位を行う。
慣性航法データと測位データとを融合させた測位システムや測位方法としては、慣性航法データと測位データを用いて、状態推定カルマンフィルターにより、移動体の位置、速度、姿勢の誤差補正を行うものがある。状態推定カルマンフィルターでは、要素数の少ない状態変数で特定される微小変化単位四元数を用いて、移動体の位置、速度、姿勢の誤差をモデリングし、誤差推定を行い、さらに、推定された誤差データを乗じることで、位置、速度、姿勢のデータを補正する測位システム及び測位方法が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−276507号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、慣性センサーデータとGPS測位データとを融合して、移動体の位置、速度、姿勢の補正を行っている。しかし、小型・軽量・ローコストの慣性センサー(例えば、MEMSセンサー等)は、バイアス誤差およびランダムドリフトが大きく、移動体の位置、速度、姿勢の高精度な測位ができないという課題を有している。
【課題を解決するための手段】
【0005】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0006】
[適用例1]本適用例に係る測位システムは、慣性センサーデータとGPS測位データとに基づきジャイロバイアス誤差の推定及び加速度バイアス誤差の推定と、位置誤差・速度誤差・方位誤差の推定と、を行う拡張カルマンフィルター演算部と、前記ジャイロバイアス誤差に基づき角速度データのバイアス補正を行い、かつ、前記加速度バイアス誤差に基づき加速度データのバイアス補正を行うバイアス補正部と、前記バイアス補正された角速度データに基づき姿勢データを演算する姿勢演算部と、前記バイアス補正された加速度データおよび前記姿勢データに基づきナビゲーションフレームの加速度データを出力する座標変換部と、前記ナビゲーションフレームの加速度データに基づき位置・速度を演算する位置/速度演算部と、前記位置/速度演算部が演算した位置・速度および前記姿勢データを、前記拡張カルマンフィルター演算部から出力された位置・速度・方位の推定誤差に基づいて補正するエラー補正部と、を有し、前記拡張カルマンフィルター演算部は、前記位置/速度演算部が演算した前記位置・速度と、前記姿勢演算部が演算した前記姿勢データとに基いて、乗算型クォータニオン誤差モデルを用いて前記ジャイロバイアス誤差、前記加速度バイアス誤差および前記位置誤差・速度誤差・方位誤差の推定を行うことを特徴とする。
なお、慣性センサーデータとは、ジャイロセンサー及び加速度センサーにて検出する角速度データ、加速度データを意味する。
【0007】
本適用例の測位システムによれば、乗算型クォータニオン(以降、乗算型Quaternionと表すことがある)誤差モデルを用いて姿勢誤差のモデリングを行い、拡張カルマンフィルター演算部によって移動体の位置、速度、姿勢の誤差を推定と、ジャイロセンサー及び加速度センサーの各バイアス誤差の推定と、誤差補正を行う。姿勢の乗算型クォータニオン誤差モデルは、加算型クォータニオン誤差モデルに比べ推定誤差の精度がよい。このことから、小型化、低コスト化が可能ではあるが、バイアス誤差及びランダムドリフトの変動が大きなMEMS(Micro Electro Mechanical System)センサーを用いる場合でも、トンネルや屋内などGPS測位データが途切れる場所においても、高精度な測位が可能である。
【0008】
[適用例2]本適用例に係る測位方法は、慣性センサーデータとGPS測位データとを融合して移動体の測位を行う測位方法であって、前記慣性センサーデータに基づき、乗算型クォータニオン誤差モデルを用いる拡張カルマンフィルターの時間更新を行う工程と、前記GPS測位データに基づき、前記拡張カルマンフィルターの観測更新を行い、位置誤差・速度誤差・方位角誤差、及びジャイロバイアス誤差・加速度バイアス誤差を推定する工程と、前記推定された位置誤差・速度誤差・方位角誤差に基づき、位置・速度・姿勢の各誤差を補正する工程と、推定されたジャイロバイアス誤差・加速度バイアス誤差に基づき、慣性センサーデータを補正する工程とを有し、前記移動体の位置・速度・姿勢のうち少なくともいずれか一つを求めることを特徴とする。
なお、拡張カルマンフィルターの時間更新とは、状態ベクトルと誤差共分散を時間毎に更新することであり、観測更新とは、外部からの補正情報を得て状態ベクトルと誤差共分散とを更新することである。
【0009】
本適用例の測位方法によれば、乗算型クォータニオン誤差モデルを用いて姿勢誤差をモデリングし、拡張カルマンフィルターの時間更新と観測更新を行い、ジャイロバイアス誤差・加速度バイアス誤差の推定及び誤差補正と、GPS測位データ(位置、速度、方位)の誤差推定及び誤差補正とを融合させることにより、トンネルや屋内などにおいて、移動体の高精度な測位が可能である。
【0010】
[適用例3]上記適用例に係る測位方法は、前記方位角誤差及び前記位置誤差の少なくとも一つを、乗算型クォータニオンを用いて誤差モデリングすることが好ましい。
【0011】
このように、姿勢の誤差モデリングに加え、位置の誤差モデリングを行うことで、より高精度な移動体の測位を行うことができる。
【0012】
[適用例4]上記適用例に係る測位方法は、外部から観測された距離情報及び相対速度情報を観測情報として用い、乗算型クォータニオン誤差モデルによって前記移動体の前記位置・速度・方位角の誤差、及び前記ジャイロバイアス誤差・加速度バイアス誤差の推定を行い、前記移動体の前記位置・速度・姿勢を補正することが好ましい。
ここで、外部から観測された距離情報及び相対速度情報(Measurementと表すことがある)には、擬似距離(pseudorange)やドップラー効果(doppler)を用いた相対速度情報が含まれる。
【0013】
このように、Measurementデータを、乗算型クォータニオン誤差モデルを用いて誤差補正することによっても、移動体の高精度な測位を行うことができる。
【0014】
[適用例5]本適用例に係る測位方法は、前記移動体が移動している場合には、請求項2ないし請求項4のいずれか一項に記載の測位方法を用いて測位し、前記移動体が停止している場合には、速度を0、ヨー角を不変として、さらに加速度センサーの検出値からロール角とピッチ角とを演算して観測値とし、前記観測値に基づき、姿勢の補正及び前記ジャイロバイアス誤差及び前記加速度バイアス誤差の補正を行うことが好ましい。
【0015】
移動体が停止している場合には、GPS測位データの精度が低下する。そこで、速度0、ヨー角不変(δψ = 0)、さらに加速度センサーの検出値から算出されたロール角とピッチ角を観測値として乗算型クォータニオン誤差モデルを用いて、姿勢の補正及びジャイロバイアス誤差及び加速度バイアス誤差の補正を行うことで、停止時における移動体の位置、姿勢を検出することができる。
【図面の簡単な説明】
【0016】
【図1】実施形態1に係る測位システムの概要を示す構成ブロック図。
【図2】実施形態1に係る演算制御部の概要を示す構成ブロック図。
【図3】実施形態1に係る測位方法の1例を示すフローチャート。
【図4】シミュレーションによる移動体の移動軌跡の1例を表すグラフ。
【図5】シミュレーションによる移動体の速度の1例を表すグラフ。
【図6】Z軸方向のシミュレーションによる性能評価の結果。
【図7】姿勢誤差に係るシミュレーションによる性能評価の結果。
【図8】姿勢誤差に係るシミュレーションによる性能評価の結果。
【図9】ジャイロバイアス誤差に係るシミュレーションによる性能評価の結果。
【図10】加速度バイアス誤差に係るシミュレーションによる性能評価の結果。
【発明を実施するための形態】
【0017】
以下、本発明の実施の形態を図面を参照して説明する。
(実施形態1)
【0018】
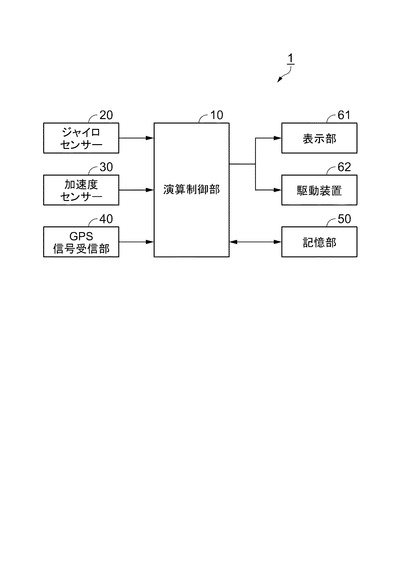
図1は、実施形態1に係る測位システムの概要を示す構成ブロック図である。測位システム1は、ジャイロセンサー20と、加速度センサー30と、GPS(Global Positioning System)信号受信部40と、ジャイロセンサー20、加速度センサー30、及びGPS信号受信部40から入力されたデータを演算処理する演算制御部10と、記憶部50を含んで構成される。演算制御部10は、移動体の位置、速度、姿勢を制御する駆動装置62、或いは、必要なデータの形態で表示するための表示部61に接続されている。
【0019】
ジャイロセンサー20は、移動体に配設され、例えば、水晶の振動型センサーやMEMSセンサーを利用し、微小振動板が回転により受けるコリオリ力に基づき、回転角速度を検出するものである。本実施形態では、ジャイロセンサー20がボディーフレーム(b‐frame)の各軸まわりの回転角速度を検出するように複数個設けられ、軸まわりの回転角速度を表すデータを出力する。
【0020】
加速度センサー30は、移動体に配設され、少なくとも一つの方向に対する移動体の加速度を測定し出力する。本実施形態では、この加速度センサー30は、水晶の振動型センサーやMEMSセンサーであり、ボディーフレームの各軸方向への移動体の移動加速度を測定し出力する。
【0021】
GPS信号受信部40は、GPS衛星からの信号を受信して、移動体の位置(緯度、経度、高度)を表すデータを出力する。本実施形態で用いられるGPS信号受信部40は広く用いられているものであるので、ここでの詳細な説明を省略する。
【0022】
演算制御部10は、CPU(Central Processing Unit)等のプログラム制御デバイスを用いて構成され、記憶部50に格納されているプログラムに従って動作する。本実施形態では、この演算制御部10が、ジャイロセンサー20、加速度センサー30やGPS信号受信部40から出力される各データに基づいて、移動体の位置、速度、姿勢、およびジャイロセンサーバイアス、加速度センサーバイアスの各誤差推定と誤差補正を行い、移動体の表示部61や駆動装置62などの出力部に出力し、移動体を制御する。
この演算制御部10の具体的な構成と作用については後に詳しく述べる。
【0023】
記憶部50は、RAM(Random Access Memory)等の記憶素子であり、演算制御部10によって実行されるプログラムを保持する。また、この記憶部50は、演算制御部10のワークメモリーとしても動作する。なお、記憶部50は、演算制御部10に内蔵する構成としてもよい。
【0024】
以下の説明では、位置、速度、姿勢の各データは、どの座標系におけるデータであるかを識別するために、データにインデックスを付して、いずれかの座標系であるかを明確にしている。
(1)地球中心を原点として、地球の自転軸と平行になるようZ軸を定めた右手系直交座標系を「iフレーム」とする。
(2)地球中心を原点として、緯度0度、経度0度方向をX軸とし、かつ地球の自転軸と平行になるようZ軸を定めた右手系直交座標系を「eフレーム」とする。
(3)移動体を原点として、北方向をX軸、地球による重力の方向をZ軸とした右手系直交座標系を「gフレーム」とする。
(4)移動体を原点として、地球による重力方向をZ軸とした右手系直交座標系であって、gフレームにおけるZ軸を中心にgフレームをα(rad)だけ回転させたときの座標系を「nフレーム(n‐frame)」とする。
(5)移動体を原点として、移動体の進行方向をX軸、揚力方向をZ軸とした右手系直交座標系を「bフレーム(b‐frame)」とする。
【0025】
なお、bフレームにおけるX軸まわりの回転を「ロール(ロール角φ)」、Y軸まわりの回転を「ピッチ(ピッチ角θ)」、Z軸まわりの回転を「ヨー(ヨー角ψ)」と称する。
【0026】
続いて、演算制御部10の構成及び作用について図面、及び数式を参照して説明する。
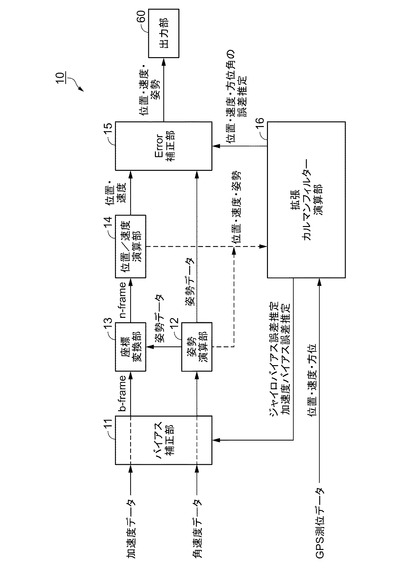
図2は、実施形態1に係る演算制御部の概要を示す構成ブロック図である。演算制御部10は、バイアス補正部11と、姿勢演算部12と、座標変換部13と、位置/速度演算部14と、エラー補正部15(error補正部15と表記)と、拡張カルマンフィルター演算部16と、を主たる構成要素として構成している。
【0027】
バイアス補正部11は、拡張カルマンフィルター演算部16によって算出されたジャイロバイアス誤差、加速度バイアス誤差の推定値を利用して、角速度データ及び加速度データの補正値を数式1を用いて算出し、加速度データ(b‐frame)は座標変換部13に、角速度データは姿勢演算部12に出力する。
【0028】
【数1】

【0029】
姿勢演算部12は、移動体の姿勢に関わる運動方程式(数式2)を用いて、姿勢を求め、座標変換部13、エラー補正部15、及び拡張カルマンフィルター演算部16に入力する。
【0030】
【数2】
【0031】
座標変換部13は、加速度センサー30が出力するb‐frameの加速度データと、姿勢演算部12が出力する姿勢データとに基づき、数式3を用いて、n‐frameの加速度データに変換して位置/速度演算部14に出力する。
【0032】
【数3】
【0033】
位置/速度演算部14は、位置および速度に関わる運動方程式(数式4)を用いて、位置と速度を演算してエラー補正部15、及び拡張カルマンフィルター演算部16に出力する。
【0034】
【数4】
【0035】
拡張カルマンフィルター演算部16は、姿勢演算部12から出力される姿勢データと、位置/速度演算部14から出力された位置データ及び速度データと、GPS測位データ(位置、速度、方位)を用いて、カルマンフィルターによって、位置、速度、方位の誤差を推定すると共に、ジャイロバイアス誤差及び加速度バイアス誤差を算出し、バイアス補正部11に入力する。本実施形態では、速度、姿勢の運動方程式が非線形のため、カルマンフィルターを拡張した誤差モデルを適用する。誤差モデルは数式5によって表すことができる。
【0036】
【数5】
【0037】
ここでは、姿勢の誤差モデルは、Quaternionの加算ではなく、より要素数の少ない微小変化単位四元数を導入し、乗算型Quaternionを用いて誤差をモデリングする。なお、微小誤差を用いた加算型Quaternionの誤差モデルは、次式で表される。
【0038】
【数6】
【0039】
加算型Quaternionのノルムは、次式で表される。
【0040】
【数7】
【0041】
数式7に表されるように、微小変化単位四元数を用いた加算型Quaternionのノルムは、制約条件のノルム=1を満足できない。
【0042】
一方、微小誤差ベクトル要素を用いた乗算型Quaternionでは姿勢誤差を次式で表すことができる。
【0043】
【数8】
【0044】
乗算型Quaternionのノルムは次式で表すことができる。
【0045】
【数9】
【0046】
乗算型Quaternionのノルムは、数式9から分かるように、乗算型Quaternion誤差モデルを利用することで、誤差を含んだ状態でも、ノルムが1であることが保証され、姿勢誤差ベクトルの要素数は4から3になり、推定する状態ベクトルの数を減少させることができる。
【0047】
ここで、推定する誤差ベクトルは、数式10で表すことができる。
【0048】
【数10】
【0049】
また、GPS測位データ(位置、速度、方位)を観測データとして、数式11のような観測方程式、及び数式12〜数式14のような誤差共分散を算出することができる。
【0050】
【数11】
【0051】
推定誤差共分散Pは次式で表される。
【0052】
【数12】
【0053】
システム誤差共分散Qは次式で表される。
【0054】
【数13】
【0055】
観測誤差共分散Rは次式で表される。
【0056】
【数14】
【0057】
数式12、数式13から、カルマンフィルターの時間更新は、次式で表すことができる。
【0058】
【数15】
【0059】
また、カルマンフィルターの観測更新は、数式16、数式17で表すことができる。
【0060】
【数16】
【0061】
【数17】
【0062】
拡張カルマンフィルター演算部16によって推定された位置、速度、方位角の誤差及びジャイロバイアス誤差及び加速度バイアス誤差の推定値を用いて、移動体の位置、速度、姿勢の補正と共に、ジャイロバイアス誤差及び加速度バイアス誤差の補正をエラー補正部(Error補正部)15で行い、出力部60(表示部61、駆動装置62)に出力し、移動体を制御する。
【0063】
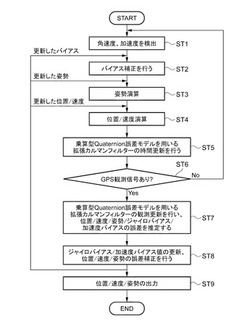
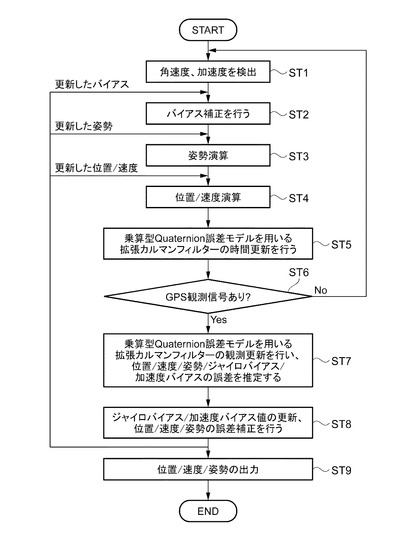
次に、測位方法についてフローチャートを参照して説明する。
図3は、本実施形態に係る測位方法の1例を示すフローチャートである。図1、図2も参照する。まず、ジャイロセンサー20によって角速度データ、加速度センサー30によって加速度データを検出する(ST1)。これら検出した角速度データ及び加速度データを後述する工程(ST7)において推定されたジャイロバイアス誤差、加速度バイアス誤差に基づき、バイアス補正部11にてバイアス補正を行う(ST2)。
【0064】
続いて、バイアス補正された角速度データに基づき姿勢演算部12で移動体の姿勢を演算する(ST3)。バイアス補正された加速度データ(b‐frame)は座標変換部13でn‐frameデータに変換され、位置/速度演算部14に入力される。位置/速度演算部14では、移動体の現時点の位置及び速度を演算する(ST4)。
【0065】
次に、乗算型Quaternion誤差モデルを用いる拡張カルマンフィルターの時間更新を行う(ST5)。拡張カルマンフィルターは、時間更新と観測更新の2ステップ交代で構成される。ここで、時間更新とは、状態方程式を用いて、状態ベクトルと誤差共分散を時間毎に更新することであり、外部からの補正情報がなければ、誤差がどんどん蓄積されていく。また、観測更新とは、外部からの補正情報を得て、蓄積された誤差を補正して、状態ベクトルと誤差共分散とを更新することである。
【0066】
次に、GPS観測信号(GPS測位データ)の検出の有無を判定する(ST6)。GPS観測信号が検出されない(No)場合、ST1〜ST5のステップを繰り返す。GPS観測信号を検出(Yes)した場合、拡張カルマンフィルター演算部16において、乗算型Quaternion誤差モデルを用いる拡張カルマンフィルターの観測更新を行い、位置・速度・姿勢、及びジャイロバイアス・加速度バイアスの各誤差を推定する(ST7)。
【0067】
次に、ジャイロバイアス値及び加速度バイアス値の更新、位置・速度・姿勢の誤差補正を行い(ST8)、誤差が補正された位置・速度・姿勢データを移動体の出力部60に出力する(ST9)。なお、ST8において、更新されたジャイロバイアス値及び加速度バイアス値は、バイアス補正部11に入力され、更新された姿勢は姿勢演算部12に入力され、更新された位置・速度情報は位置/速度演算部14に入力され、図示するようなループで繰り返される。
(実施例)
【0068】
次に、本実施形態の具体的な実施例について、乗算型Quaternionと加算型Quaternionの各誤差モデルの誤差推定の比較結果を図面を参照して説明する。まず、比較基礎となる移動体の移動軌跡、速度について説明する。
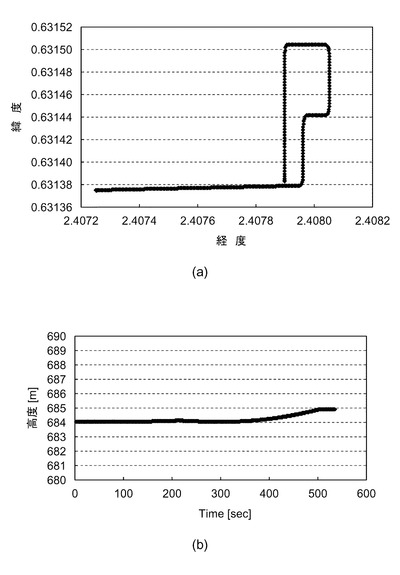
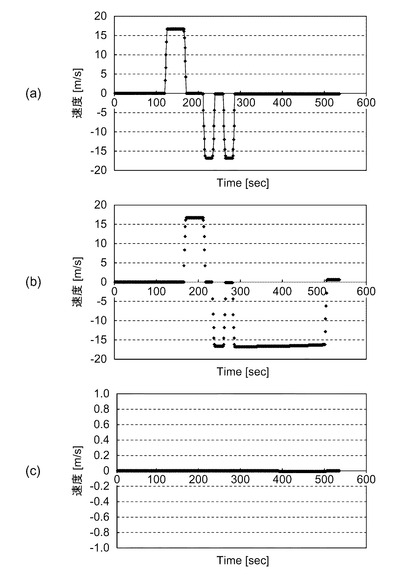
図4、図5は、移動体のシミュレーションによる移動軌跡と速度の1例を表すグラフである。図4(a)は移動体の移動軌跡(横軸は経度、縦軸は緯度)を表しており、図4(b)は高度の移動(横軸は時間[time:sec]、縦軸は高度[m])を表している。図5(a)は南北方向の移動、図5(b)は東西方向の移動を表している。共に、横軸は時間(time[sec])、縦軸は速度[m/s]を表している。図5(c)は水平面に対する垂直方向(Z軸方向)の速度[m/s]を表している。つまり、本シミュレーションは、移動体は水平方向の移動をしている場合である。
【0069】
続いて、図4、図5に示した移動体の移動軌跡に基づき、乗算型Quaternion誤差モデルと加算型Quaternion誤差モデルの性能比較結果について説明する。
【0070】
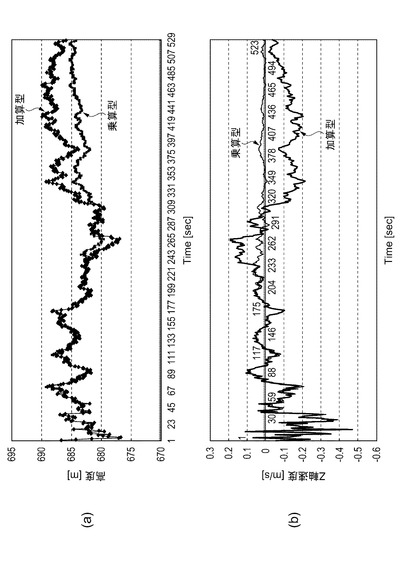
図6は、Z軸方向のシミュレーションによる性能評価の結果を表し、図6(a)は高度の変化、図6(b)はZ軸方向の速度変化[m/s]を表している。なお、図4(b)で示したように、Z軸方向では高度684mで水平移動をした場合であって、加算型Quaternion誤差モデルに比べ、乗算型Quaternion誤差モデルの方が精度がよいことが分かる。
【0071】
次に、姿勢誤差のシミュレーション結果について説明する。
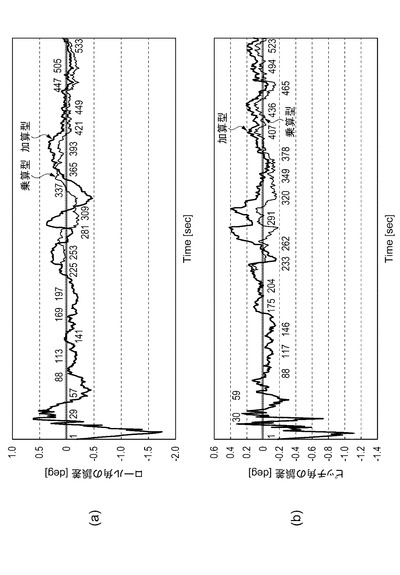
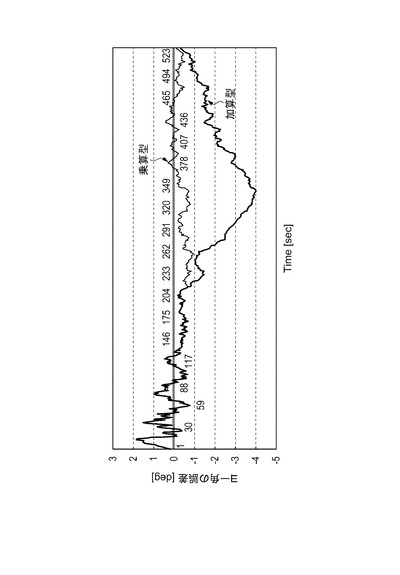
図7、図8は、姿勢誤差に係るシミュレーションによる性能評価の結果を表し、図7(a)はロール角誤差(φ[deg])、図7(b)はピッチ角誤差(θ[deg])、図8はヨー角誤差(ψ[deg])を表している。横軸は時間(time[sec])、縦軸は誤差[deg]である。
また、表1に、上記シミュレーション結果から演算して求めた各姿勢の分散値を表している。
【0072】
【表1】
【0073】
図7、図8及び表1からも分かるように、移動体の姿勢誤差、つまり、ロール角誤差、ピッチ角誤差、及びヨー角誤差においても、加算型Quaternionに比べ、乗算型Quaternionの方が誤差が小さくなる。
【0074】
次に、バイアス誤差のシミュレーション結果について説明する。
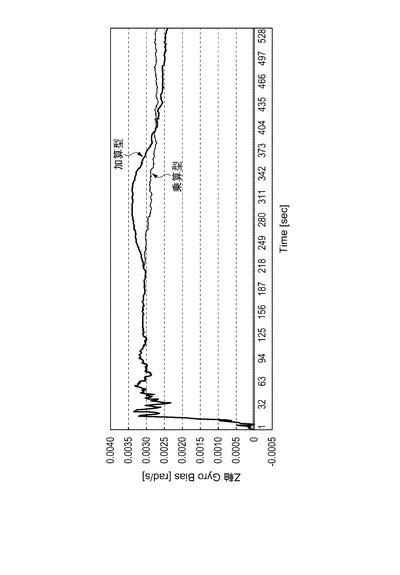
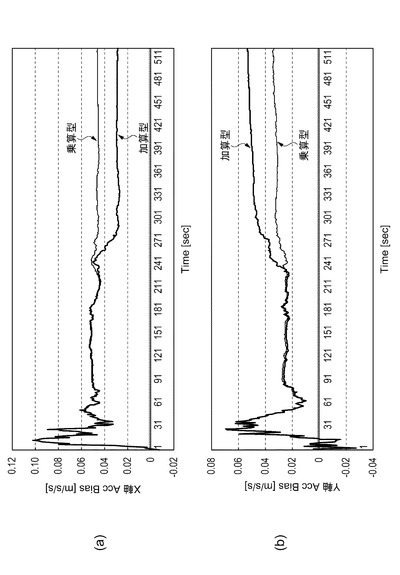
図9は、バイアス誤差に係るシミュレーションによる性能評価の結果を表し、図9はZ軸のジャイロバイアス誤差(Gyro Bias[rad/S])、図10(a)はX軸の加速度バイアス誤差(Acc Bias[m/s/s])、図10(b)は、Y軸の加速度バイアス誤差(Acc Bias[m/s/s])を表している。共に横軸は時間(time[sec])である。
【0075】
図9、図10から分かるように、ジャイロバイアス誤差及び加速度バイアス誤差の推定値は、加算型Quaternionに比べ、乗算型Quaternionの方が誤差が小さくなる。
【0076】
以上説明した本実施形態の測位システム及び測位方法によれば、慣性センサーデータ(加速度データ及び角速度データ)とGPS測位データを融合して、拡張カルマンフィルター(拡張カルマンフィルター演算部16)によって移動体の位置、速度、姿勢の誤差を推定すると共に、ジャイロセンサー20及び加速度センサー30の各バイアス誤差の推定を行う。また、拡張カルマンフィルターでは、乗算型Quaternion誤差モデルを用いて姿勢誤差を正確にモデリングできることから、位置、速度、姿勢およびセンサーバイアスの誤差を精度よく補正することができる。
【0077】
従って、位置、速度、姿勢及びジャイロバイアス、加速度バイアスの各誤差を精度よく補正することができ、慣性センサーとして、小型、低コスト化が可能ではあるが、バイアス誤差及びランダムドリフトの変動が大きなMEMSセンサーを用いても、高精度、高安定なセンサー出力を得ることができることから、トンネルや屋内などGPS測位データが途切れる場所においても、高精度な測位が可能である。
(実施形態2)
【0078】
続いて、実施形態2について説明する。前述した実施形態1が、要素数の少ない微小変化単位四元数を導入し、乗算型Quaternionを用いて姿勢誤差をモデリングしていることに対して、実施形態2は、姿勢誤差のモデルだけでなく、位置誤差モデルでも、乗算型Quaternionを用いて誤差をモデリングすることに特徴を有する。具体的には、数式18に示すように誤差のモデリングを行う。
【0079】
【数18】
【0080】
このように、姿勢の誤差モデリングに加え、位置の誤差モデリングを行うことで、乗算型クォータニオンを用いて正確に誤差のモデリングを行い、位置、速度、及びセンサーバイアスの誤差をより高精度に補正することができる。
(実施形態3)
【0081】
続いて、実施形態3について説明する。前述した実施形態1は、GPS信号受信部40からの測位データ(位置、速度、方位角)を観測データとして利用し、拡張カルマンフィルターにより移動体の位置、速度、姿勢の誤差及びジャイロセンサー20、加速度センサー30のバイアス誤差を推定している。この実施形態1に対して、実施形態3では、外部から観測された少なくとも距離情報及び相対速度情報(measurement)を観測情報として用い、乗算型クォータニオン誤差モデルによって移動体の位置・速度・姿勢の誤差、及びジャイロバイアス誤差・加速度バイアス誤差の推定を行い、移動体の位置・速度・姿勢を補正することを特徴とする。
【0082】
measuamentとしては、擬似距離(psudorange)やドップラー効果(doppler)を用いた相対速度情報を用いることができ、このような手法を用いても、移動体の高精度な測位を行うことができる。
(実施形態4)
【0083】
続いて、実施形態4について説明する。実施形態4は、移動体が移動している間には、前述した実施形態1、実施形態2、実施形態3に記載の測位方法を用いてGPS信号受信部40からの測位データ(位置、速度、方位角)、または距離情報、相対速度情報を観測データとして利用して、移動体の位置、速度、姿勢の誤差及びジャイロセンサー20、加速度センサー30の各バイアス誤差を推定し、補正する。
ここで、移動体が静止している間はGPS信号受信部40からの測位データの精度がよくないことから、実施形態4では、以下の観測データを利用して、位置、速度、姿勢の誤差、及び慣性センサーのバイアス誤差を推定する。
(1)速度をゼロ(V=0)とする。
(2)ヨー角は不変(Δψ=0)とする。
(3)移動体が静止しているため、加速度センサー30の出力から次に示す数式も用いてロール(Roll)角とピッチ(Pitch)角を求める。
【0084】
【数19】
【0085】
このようにすれば、数式19によって算出されたロール角とピッチ角と、ゼロ速度、ヨー角不変を観測値として、拡張カルマンフィルターに入れて、移動体が停止している場合においても、姿勢の補正、及びセンサーバイアスの補正ができる。
【符号の説明】
【0086】
1…測位システム、10…演算制御部、11…バイアス補正部、12…姿勢演算部、13…座標変換部、14…位置/速度演算部、15…エラー(Error)補正部、16…拡張カルマンフィルター演算部、20…ジャイロセンサー、30…加速度センサー、40…GPS信号受信部。
【技術分野】
【0001】
本発明は、測位システム、及び測位方法に関する。
【背景技術】
【0002】
屋内やトンネル等、測位データが得にくい場所では、慣性航法データと測位データとを融合させることによって、屋内外を問わず、移動体の位置、速度、姿勢等の高精度な測位を行う。
慣性航法データと測位データとを融合させた測位システムや測位方法としては、慣性航法データと測位データを用いて、状態推定カルマンフィルターにより、移動体の位置、速度、姿勢の誤差補正を行うものがある。状態推定カルマンフィルターでは、要素数の少ない状態変数で特定される微小変化単位四元数を用いて、移動体の位置、速度、姿勢の誤差をモデリングし、誤差推定を行い、さらに、推定された誤差データを乗じることで、位置、速度、姿勢のデータを補正する測位システム及び測位方法が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−276507号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、慣性センサーデータとGPS測位データとを融合して、移動体の位置、速度、姿勢の補正を行っている。しかし、小型・軽量・ローコストの慣性センサー(例えば、MEMSセンサー等)は、バイアス誤差およびランダムドリフトが大きく、移動体の位置、速度、姿勢の高精度な測位ができないという課題を有している。
【課題を解決するための手段】
【0005】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0006】
[適用例1]本適用例に係る測位システムは、慣性センサーデータとGPS測位データとに基づきジャイロバイアス誤差の推定及び加速度バイアス誤差の推定と、位置誤差・速度誤差・方位誤差の推定と、を行う拡張カルマンフィルター演算部と、前記ジャイロバイアス誤差に基づき角速度データのバイアス補正を行い、かつ、前記加速度バイアス誤差に基づき加速度データのバイアス補正を行うバイアス補正部と、前記バイアス補正された角速度データに基づき姿勢データを演算する姿勢演算部と、前記バイアス補正された加速度データおよび前記姿勢データに基づきナビゲーションフレームの加速度データを出力する座標変換部と、前記ナビゲーションフレームの加速度データに基づき位置・速度を演算する位置/速度演算部と、前記位置/速度演算部が演算した位置・速度および前記姿勢データを、前記拡張カルマンフィルター演算部から出力された位置・速度・方位の推定誤差に基づいて補正するエラー補正部と、を有し、前記拡張カルマンフィルター演算部は、前記位置/速度演算部が演算した前記位置・速度と、前記姿勢演算部が演算した前記姿勢データとに基いて、乗算型クォータニオン誤差モデルを用いて前記ジャイロバイアス誤差、前記加速度バイアス誤差および前記位置誤差・速度誤差・方位誤差の推定を行うことを特徴とする。
なお、慣性センサーデータとは、ジャイロセンサー及び加速度センサーにて検出する角速度データ、加速度データを意味する。
【0007】
本適用例の測位システムによれば、乗算型クォータニオン(以降、乗算型Quaternionと表すことがある)誤差モデルを用いて姿勢誤差のモデリングを行い、拡張カルマンフィルター演算部によって移動体の位置、速度、姿勢の誤差を推定と、ジャイロセンサー及び加速度センサーの各バイアス誤差の推定と、誤差補正を行う。姿勢の乗算型クォータニオン誤差モデルは、加算型クォータニオン誤差モデルに比べ推定誤差の精度がよい。このことから、小型化、低コスト化が可能ではあるが、バイアス誤差及びランダムドリフトの変動が大きなMEMS(Micro Electro Mechanical System)センサーを用いる場合でも、トンネルや屋内などGPS測位データが途切れる場所においても、高精度な測位が可能である。
【0008】
[適用例2]本適用例に係る測位方法は、慣性センサーデータとGPS測位データとを融合して移動体の測位を行う測位方法であって、前記慣性センサーデータに基づき、乗算型クォータニオン誤差モデルを用いる拡張カルマンフィルターの時間更新を行う工程と、前記GPS測位データに基づき、前記拡張カルマンフィルターの観測更新を行い、位置誤差・速度誤差・方位角誤差、及びジャイロバイアス誤差・加速度バイアス誤差を推定する工程と、前記推定された位置誤差・速度誤差・方位角誤差に基づき、位置・速度・姿勢の各誤差を補正する工程と、推定されたジャイロバイアス誤差・加速度バイアス誤差に基づき、慣性センサーデータを補正する工程とを有し、前記移動体の位置・速度・姿勢のうち少なくともいずれか一つを求めることを特徴とする。
なお、拡張カルマンフィルターの時間更新とは、状態ベクトルと誤差共分散を時間毎に更新することであり、観測更新とは、外部からの補正情報を得て状態ベクトルと誤差共分散とを更新することである。
【0009】
本適用例の測位方法によれば、乗算型クォータニオン誤差モデルを用いて姿勢誤差をモデリングし、拡張カルマンフィルターの時間更新と観測更新を行い、ジャイロバイアス誤差・加速度バイアス誤差の推定及び誤差補正と、GPS測位データ(位置、速度、方位)の誤差推定及び誤差補正とを融合させることにより、トンネルや屋内などにおいて、移動体の高精度な測位が可能である。
【0010】
[適用例3]上記適用例に係る測位方法は、前記方位角誤差及び前記位置誤差の少なくとも一つを、乗算型クォータニオンを用いて誤差モデリングすることが好ましい。
【0011】
このように、姿勢の誤差モデリングに加え、位置の誤差モデリングを行うことで、より高精度な移動体の測位を行うことができる。
【0012】
[適用例4]上記適用例に係る測位方法は、外部から観測された距離情報及び相対速度情報を観測情報として用い、乗算型クォータニオン誤差モデルによって前記移動体の前記位置・速度・方位角の誤差、及び前記ジャイロバイアス誤差・加速度バイアス誤差の推定を行い、前記移動体の前記位置・速度・姿勢を補正することが好ましい。
ここで、外部から観測された距離情報及び相対速度情報(Measurementと表すことがある)には、擬似距離(pseudorange)やドップラー効果(doppler)を用いた相対速度情報が含まれる。
【0013】
このように、Measurementデータを、乗算型クォータニオン誤差モデルを用いて誤差補正することによっても、移動体の高精度な測位を行うことができる。
【0014】
[適用例5]本適用例に係る測位方法は、前記移動体が移動している場合には、請求項2ないし請求項4のいずれか一項に記載の測位方法を用いて測位し、前記移動体が停止している場合には、速度を0、ヨー角を不変として、さらに加速度センサーの検出値からロール角とピッチ角とを演算して観測値とし、前記観測値に基づき、姿勢の補正及び前記ジャイロバイアス誤差及び前記加速度バイアス誤差の補正を行うことが好ましい。
【0015】
移動体が停止している場合には、GPS測位データの精度が低下する。そこで、速度0、ヨー角不変(δψ = 0)、さらに加速度センサーの検出値から算出されたロール角とピッチ角を観測値として乗算型クォータニオン誤差モデルを用いて、姿勢の補正及びジャイロバイアス誤差及び加速度バイアス誤差の補正を行うことで、停止時における移動体の位置、姿勢を検出することができる。
【図面の簡単な説明】
【0016】
【図1】実施形態1に係る測位システムの概要を示す構成ブロック図。
【図2】実施形態1に係る演算制御部の概要を示す構成ブロック図。
【図3】実施形態1に係る測位方法の1例を示すフローチャート。
【図4】シミュレーションによる移動体の移動軌跡の1例を表すグラフ。
【図5】シミュレーションによる移動体の速度の1例を表すグラフ。
【図6】Z軸方向のシミュレーションによる性能評価の結果。
【図7】姿勢誤差に係るシミュレーションによる性能評価の結果。
【図8】姿勢誤差に係るシミュレーションによる性能評価の結果。
【図9】ジャイロバイアス誤差に係るシミュレーションによる性能評価の結果。
【図10】加速度バイアス誤差に係るシミュレーションによる性能評価の結果。
【発明を実施するための形態】
【0017】
以下、本発明の実施の形態を図面を参照して説明する。
(実施形態1)
【0018】
図1は、実施形態1に係る測位システムの概要を示す構成ブロック図である。測位システム1は、ジャイロセンサー20と、加速度センサー30と、GPS(Global Positioning System)信号受信部40と、ジャイロセンサー20、加速度センサー30、及びGPS信号受信部40から入力されたデータを演算処理する演算制御部10と、記憶部50を含んで構成される。演算制御部10は、移動体の位置、速度、姿勢を制御する駆動装置62、或いは、必要なデータの形態で表示するための表示部61に接続されている。
【0019】
ジャイロセンサー20は、移動体に配設され、例えば、水晶の振動型センサーやMEMSセンサーを利用し、微小振動板が回転により受けるコリオリ力に基づき、回転角速度を検出するものである。本実施形態では、ジャイロセンサー20がボディーフレーム(b‐frame)の各軸まわりの回転角速度を検出するように複数個設けられ、軸まわりの回転角速度を表すデータを出力する。
【0020】
加速度センサー30は、移動体に配設され、少なくとも一つの方向に対する移動体の加速度を測定し出力する。本実施形態では、この加速度センサー30は、水晶の振動型センサーやMEMSセンサーであり、ボディーフレームの各軸方向への移動体の移動加速度を測定し出力する。
【0021】
GPS信号受信部40は、GPS衛星からの信号を受信して、移動体の位置(緯度、経度、高度)を表すデータを出力する。本実施形態で用いられるGPS信号受信部40は広く用いられているものであるので、ここでの詳細な説明を省略する。
【0022】
演算制御部10は、CPU(Central Processing Unit)等のプログラム制御デバイスを用いて構成され、記憶部50に格納されているプログラムに従って動作する。本実施形態では、この演算制御部10が、ジャイロセンサー20、加速度センサー30やGPS信号受信部40から出力される各データに基づいて、移動体の位置、速度、姿勢、およびジャイロセンサーバイアス、加速度センサーバイアスの各誤差推定と誤差補正を行い、移動体の表示部61や駆動装置62などの出力部に出力し、移動体を制御する。
この演算制御部10の具体的な構成と作用については後に詳しく述べる。
【0023】
記憶部50は、RAM(Random Access Memory)等の記憶素子であり、演算制御部10によって実行されるプログラムを保持する。また、この記憶部50は、演算制御部10のワークメモリーとしても動作する。なお、記憶部50は、演算制御部10に内蔵する構成としてもよい。
【0024】
以下の説明では、位置、速度、姿勢の各データは、どの座標系におけるデータであるかを識別するために、データにインデックスを付して、いずれかの座標系であるかを明確にしている。
(1)地球中心を原点として、地球の自転軸と平行になるようZ軸を定めた右手系直交座標系を「iフレーム」とする。
(2)地球中心を原点として、緯度0度、経度0度方向をX軸とし、かつ地球の自転軸と平行になるようZ軸を定めた右手系直交座標系を「eフレーム」とする。
(3)移動体を原点として、北方向をX軸、地球による重力の方向をZ軸とした右手系直交座標系を「gフレーム」とする。
(4)移動体を原点として、地球による重力方向をZ軸とした右手系直交座標系であって、gフレームにおけるZ軸を中心にgフレームをα(rad)だけ回転させたときの座標系を「nフレーム(n‐frame)」とする。
(5)移動体を原点として、移動体の進行方向をX軸、揚力方向をZ軸とした右手系直交座標系を「bフレーム(b‐frame)」とする。
【0025】
なお、bフレームにおけるX軸まわりの回転を「ロール(ロール角φ)」、Y軸まわりの回転を「ピッチ(ピッチ角θ)」、Z軸まわりの回転を「ヨー(ヨー角ψ)」と称する。
【0026】
続いて、演算制御部10の構成及び作用について図面、及び数式を参照して説明する。
図2は、実施形態1に係る演算制御部の概要を示す構成ブロック図である。演算制御部10は、バイアス補正部11と、姿勢演算部12と、座標変換部13と、位置/速度演算部14と、エラー補正部15(error補正部15と表記)と、拡張カルマンフィルター演算部16と、を主たる構成要素として構成している。
【0027】
バイアス補正部11は、拡張カルマンフィルター演算部16によって算出されたジャイロバイアス誤差、加速度バイアス誤差の推定値を利用して、角速度データ及び加速度データの補正値を数式1を用いて算出し、加速度データ(b‐frame)は座標変換部13に、角速度データは姿勢演算部12に出力する。
【0028】
【数1】
【0029】
姿勢演算部12は、移動体の姿勢に関わる運動方程式(数式2)を用いて、姿勢を求め、座標変換部13、エラー補正部15、及び拡張カルマンフィルター演算部16に入力する。
【0030】
【数2】
【0031】
座標変換部13は、加速度センサー30が出力するb‐frameの加速度データと、姿勢演算部12が出力する姿勢データとに基づき、数式3を用いて、n‐frameの加速度データに変換して位置/速度演算部14に出力する。
【0032】
【数3】
【0033】
位置/速度演算部14は、位置および速度に関わる運動方程式(数式4)を用いて、位置と速度を演算してエラー補正部15、及び拡張カルマンフィルター演算部16に出力する。
【0034】
【数4】
【0035】
拡張カルマンフィルター演算部16は、姿勢演算部12から出力される姿勢データと、位置/速度演算部14から出力された位置データ及び速度データと、GPS測位データ(位置、速度、方位)を用いて、カルマンフィルターによって、位置、速度、方位の誤差を推定すると共に、ジャイロバイアス誤差及び加速度バイアス誤差を算出し、バイアス補正部11に入力する。本実施形態では、速度、姿勢の運動方程式が非線形のため、カルマンフィルターを拡張した誤差モデルを適用する。誤差モデルは数式5によって表すことができる。
【0036】
【数5】
【0037】
ここでは、姿勢の誤差モデルは、Quaternionの加算ではなく、より要素数の少ない微小変化単位四元数を導入し、乗算型Quaternionを用いて誤差をモデリングする。なお、微小誤差を用いた加算型Quaternionの誤差モデルは、次式で表される。
【0038】
【数6】
【0039】
加算型Quaternionのノルムは、次式で表される。
【0040】
【数7】
【0041】
数式7に表されるように、微小変化単位四元数を用いた加算型Quaternionのノルムは、制約条件のノルム=1を満足できない。
【0042】
一方、微小誤差ベクトル要素を用いた乗算型Quaternionでは姿勢誤差を次式で表すことができる。
【0043】
【数8】
【0044】
乗算型Quaternionのノルムは次式で表すことができる。
【0045】
【数9】
【0046】
乗算型Quaternionのノルムは、数式9から分かるように、乗算型Quaternion誤差モデルを利用することで、誤差を含んだ状態でも、ノルムが1であることが保証され、姿勢誤差ベクトルの要素数は4から3になり、推定する状態ベクトルの数を減少させることができる。
【0047】
ここで、推定する誤差ベクトルは、数式10で表すことができる。
【0048】
【数10】
【0049】
また、GPS測位データ(位置、速度、方位)を観測データとして、数式11のような観測方程式、及び数式12〜数式14のような誤差共分散を算出することができる。
【0050】
【数11】
【0051】
推定誤差共分散Pは次式で表される。
【0052】
【数12】
【0053】
システム誤差共分散Qは次式で表される。
【0054】
【数13】
【0055】
観測誤差共分散Rは次式で表される。
【0056】
【数14】
【0057】
数式12、数式13から、カルマンフィルターの時間更新は、次式で表すことができる。
【0058】
【数15】
【0059】
また、カルマンフィルターの観測更新は、数式16、数式17で表すことができる。
【0060】
【数16】
【0061】
【数17】
【0062】
拡張カルマンフィルター演算部16によって推定された位置、速度、方位角の誤差及びジャイロバイアス誤差及び加速度バイアス誤差の推定値を用いて、移動体の位置、速度、姿勢の補正と共に、ジャイロバイアス誤差及び加速度バイアス誤差の補正をエラー補正部(Error補正部)15で行い、出力部60(表示部61、駆動装置62)に出力し、移動体を制御する。
【0063】
次に、測位方法についてフローチャートを参照して説明する。
図3は、本実施形態に係る測位方法の1例を示すフローチャートである。図1、図2も参照する。まず、ジャイロセンサー20によって角速度データ、加速度センサー30によって加速度データを検出する(ST1)。これら検出した角速度データ及び加速度データを後述する工程(ST7)において推定されたジャイロバイアス誤差、加速度バイアス誤差に基づき、バイアス補正部11にてバイアス補正を行う(ST2)。
【0064】
続いて、バイアス補正された角速度データに基づき姿勢演算部12で移動体の姿勢を演算する(ST3)。バイアス補正された加速度データ(b‐frame)は座標変換部13でn‐frameデータに変換され、位置/速度演算部14に入力される。位置/速度演算部14では、移動体の現時点の位置及び速度を演算する(ST4)。
【0065】
次に、乗算型Quaternion誤差モデルを用いる拡張カルマンフィルターの時間更新を行う(ST5)。拡張カルマンフィルターは、時間更新と観測更新の2ステップ交代で構成される。ここで、時間更新とは、状態方程式を用いて、状態ベクトルと誤差共分散を時間毎に更新することであり、外部からの補正情報がなければ、誤差がどんどん蓄積されていく。また、観測更新とは、外部からの補正情報を得て、蓄積された誤差を補正して、状態ベクトルと誤差共分散とを更新することである。
【0066】
次に、GPS観測信号(GPS測位データ)の検出の有無を判定する(ST6)。GPS観測信号が検出されない(No)場合、ST1〜ST5のステップを繰り返す。GPS観測信号を検出(Yes)した場合、拡張カルマンフィルター演算部16において、乗算型Quaternion誤差モデルを用いる拡張カルマンフィルターの観測更新を行い、位置・速度・姿勢、及びジャイロバイアス・加速度バイアスの各誤差を推定する(ST7)。
【0067】
次に、ジャイロバイアス値及び加速度バイアス値の更新、位置・速度・姿勢の誤差補正を行い(ST8)、誤差が補正された位置・速度・姿勢データを移動体の出力部60に出力する(ST9)。なお、ST8において、更新されたジャイロバイアス値及び加速度バイアス値は、バイアス補正部11に入力され、更新された姿勢は姿勢演算部12に入力され、更新された位置・速度情報は位置/速度演算部14に入力され、図示するようなループで繰り返される。
(実施例)
【0068】
次に、本実施形態の具体的な実施例について、乗算型Quaternionと加算型Quaternionの各誤差モデルの誤差推定の比較結果を図面を参照して説明する。まず、比較基礎となる移動体の移動軌跡、速度について説明する。
図4、図5は、移動体のシミュレーションによる移動軌跡と速度の1例を表すグラフである。図4(a)は移動体の移動軌跡(横軸は経度、縦軸は緯度)を表しており、図4(b)は高度の移動(横軸は時間[time:sec]、縦軸は高度[m])を表している。図5(a)は南北方向の移動、図5(b)は東西方向の移動を表している。共に、横軸は時間(time[sec])、縦軸は速度[m/s]を表している。図5(c)は水平面に対する垂直方向(Z軸方向)の速度[m/s]を表している。つまり、本シミュレーションは、移動体は水平方向の移動をしている場合である。
【0069】
続いて、図4、図5に示した移動体の移動軌跡に基づき、乗算型Quaternion誤差モデルと加算型Quaternion誤差モデルの性能比較結果について説明する。
【0070】
図6は、Z軸方向のシミュレーションによる性能評価の結果を表し、図6(a)は高度の変化、図6(b)はZ軸方向の速度変化[m/s]を表している。なお、図4(b)で示したように、Z軸方向では高度684mで水平移動をした場合であって、加算型Quaternion誤差モデルに比べ、乗算型Quaternion誤差モデルの方が精度がよいことが分かる。
【0071】
次に、姿勢誤差のシミュレーション結果について説明する。
図7、図8は、姿勢誤差に係るシミュレーションによる性能評価の結果を表し、図7(a)はロール角誤差(φ[deg])、図7(b)はピッチ角誤差(θ[deg])、図8はヨー角誤差(ψ[deg])を表している。横軸は時間(time[sec])、縦軸は誤差[deg]である。
また、表1に、上記シミュレーション結果から演算して求めた各姿勢の分散値を表している。
【0072】
【表1】
【0073】
図7、図8及び表1からも分かるように、移動体の姿勢誤差、つまり、ロール角誤差、ピッチ角誤差、及びヨー角誤差においても、加算型Quaternionに比べ、乗算型Quaternionの方が誤差が小さくなる。
【0074】
次に、バイアス誤差のシミュレーション結果について説明する。
図9は、バイアス誤差に係るシミュレーションによる性能評価の結果を表し、図9はZ軸のジャイロバイアス誤差(Gyro Bias[rad/S])、図10(a)はX軸の加速度バイアス誤差(Acc Bias[m/s/s])、図10(b)は、Y軸の加速度バイアス誤差(Acc Bias[m/s/s])を表している。共に横軸は時間(time[sec])である。
【0075】
図9、図10から分かるように、ジャイロバイアス誤差及び加速度バイアス誤差の推定値は、加算型Quaternionに比べ、乗算型Quaternionの方が誤差が小さくなる。
【0076】
以上説明した本実施形態の測位システム及び測位方法によれば、慣性センサーデータ(加速度データ及び角速度データ)とGPS測位データを融合して、拡張カルマンフィルター(拡張カルマンフィルター演算部16)によって移動体の位置、速度、姿勢の誤差を推定すると共に、ジャイロセンサー20及び加速度センサー30の各バイアス誤差の推定を行う。また、拡張カルマンフィルターでは、乗算型Quaternion誤差モデルを用いて姿勢誤差を正確にモデリングできることから、位置、速度、姿勢およびセンサーバイアスの誤差を精度よく補正することができる。
【0077】
従って、位置、速度、姿勢及びジャイロバイアス、加速度バイアスの各誤差を精度よく補正することができ、慣性センサーとして、小型、低コスト化が可能ではあるが、バイアス誤差及びランダムドリフトの変動が大きなMEMSセンサーを用いても、高精度、高安定なセンサー出力を得ることができることから、トンネルや屋内などGPS測位データが途切れる場所においても、高精度な測位が可能である。
(実施形態2)
【0078】
続いて、実施形態2について説明する。前述した実施形態1が、要素数の少ない微小変化単位四元数を導入し、乗算型Quaternionを用いて姿勢誤差をモデリングしていることに対して、実施形態2は、姿勢誤差のモデルだけでなく、位置誤差モデルでも、乗算型Quaternionを用いて誤差をモデリングすることに特徴を有する。具体的には、数式18に示すように誤差のモデリングを行う。
【0079】
【数18】
【0080】
このように、姿勢の誤差モデリングに加え、位置の誤差モデリングを行うことで、乗算型クォータニオンを用いて正確に誤差のモデリングを行い、位置、速度、及びセンサーバイアスの誤差をより高精度に補正することができる。
(実施形態3)
【0081】
続いて、実施形態3について説明する。前述した実施形態1は、GPS信号受信部40からの測位データ(位置、速度、方位角)を観測データとして利用し、拡張カルマンフィルターにより移動体の位置、速度、姿勢の誤差及びジャイロセンサー20、加速度センサー30のバイアス誤差を推定している。この実施形態1に対して、実施形態3では、外部から観測された少なくとも距離情報及び相対速度情報(measurement)を観測情報として用い、乗算型クォータニオン誤差モデルによって移動体の位置・速度・姿勢の誤差、及びジャイロバイアス誤差・加速度バイアス誤差の推定を行い、移動体の位置・速度・姿勢を補正することを特徴とする。
【0082】
measuamentとしては、擬似距離(psudorange)やドップラー効果(doppler)を用いた相対速度情報を用いることができ、このような手法を用いても、移動体の高精度な測位を行うことができる。
(実施形態4)
【0083】
続いて、実施形態4について説明する。実施形態4は、移動体が移動している間には、前述した実施形態1、実施形態2、実施形態3に記載の測位方法を用いてGPS信号受信部40からの測位データ(位置、速度、方位角)、または距離情報、相対速度情報を観測データとして利用して、移動体の位置、速度、姿勢の誤差及びジャイロセンサー20、加速度センサー30の各バイアス誤差を推定し、補正する。
ここで、移動体が静止している間はGPS信号受信部40からの測位データの精度がよくないことから、実施形態4では、以下の観測データを利用して、位置、速度、姿勢の誤差、及び慣性センサーのバイアス誤差を推定する。
(1)速度をゼロ(V=0)とする。
(2)ヨー角は不変(Δψ=0)とする。
(3)移動体が静止しているため、加速度センサー30の出力から次に示す数式も用いてロール(Roll)角とピッチ(Pitch)角を求める。
【0084】
【数19】
【0085】
このようにすれば、数式19によって算出されたロール角とピッチ角と、ゼロ速度、ヨー角不変を観測値として、拡張カルマンフィルターに入れて、移動体が停止している場合においても、姿勢の補正、及びセンサーバイアスの補正ができる。
【符号の説明】
【0086】
1…測位システム、10…演算制御部、11…バイアス補正部、12…姿勢演算部、13…座標変換部、14…位置/速度演算部、15…エラー(Error)補正部、16…拡張カルマンフィルター演算部、20…ジャイロセンサー、30…加速度センサー、40…GPS信号受信部。
【特許請求の範囲】
【請求項1】
慣性センサーデータとGPS測位データとに基づきジャイロバイアス誤差の推定及び加速度バイアス誤差の推定と、位置誤差・速度誤差・方位誤差の推定と、を行う拡張カルマンフィルター演算部と、
前記ジャイロバイアス誤差に基づき角速度データのバイアス補正を行い、かつ、前記加速度バイアス誤差に基づき加速度データのバイアス補正を行うバイアス補正部と、
前記バイアス補正された角速度データに基づき姿勢データを演算する姿勢演算部と、
前記バイアス補正された加速度データおよび前記姿勢データに基づきナビゲーションフレームの加速度データを出力する座標変換部と、
前記ナビゲーションフレームの加速度データに基づき位置・速度を演算する位置/速度演算部と、
前記位置/速度演算部が演算した位置・速度および前記姿勢データを、前記拡張カルマンフィルター演算部から出力された位置・速度・方位の推定誤差に基づいて補正するエラー補正部と、
を有し、
前記拡張カルマンフィルター演算部は、前記位置/速度演算部が演算した前記位置・速度と、前記姿勢演算部が演算した前記姿勢データとに基いて、乗算型クォータニオン誤差モデルを用いて前記ジャイロバイアス誤差、前記加速度バイアス誤差および前記位置誤差・速度誤差・方位誤差の推定を行うことを特徴とする測位システム。
【請求項2】
慣性センサーデータとGPS測位データとを融合して移動体の測位を行う測位方法であって、
前記慣性センサーデータに基づき、乗算型クォータニオン誤差モデルを用いる拡張カルマンフィルターの時間更新を行う工程と、
前記GPS測位データに基づき、前記拡張カルマンフィルターの観測更新を行い、位置誤差・速度誤差・方位角誤差、及びジャイロバイアス誤差・加速度バイアス誤差を推定する工程と、
前記推定された位置誤差・速度誤差・方位角誤差に基づき、位置・速度・姿勢の各誤差を補正する工程と、
推定されたジャイロバイアス誤差・加速度バイアス誤差に基づき、慣性センサーデータを補正する工程と
を有し、
前記移動体の位置・速度・姿勢のうち少なくともいずれか一つを求めることを特徴とする測位方法。
【請求項3】
請求項2に記載の測位方法において、
前記方位角誤差及び前記位置誤差の少なくとも一つを、乗算型クォータニオンを用いて誤差モデリングすることを特徴とする測位方法。
【請求項4】
請求項2に記載の測位方法において、
外部から観測された距離情報及び相対速度情報を観測情報として用い、乗算型クォータニオン誤差モデルによって前記移動体の前記位置・速度・方位角の誤差、及び前記ジャイロバイアス誤差・加速度バイアス誤差の推定を行い、前記移動体の前記位置・速度・姿勢を補正することを特徴とする測位方法。
【請求項5】
前記移動体が移動している場合には、請求項2ないし請求項4のいずれか一項に記載の測位方法を用いて測位し、
前記移動体が停止している場合には、速度を0、ヨー角を不変として、さらに加速度センサーの検出値からロール角とピッチ角とを演算して観測値とし、前記観測値に基づき、姿勢の補正及び前記ジャイロバイアス誤差及び前記加速度バイアス誤差の補正を行うことを特徴とする測位方法。
【請求項1】
慣性センサーデータとGPS測位データとに基づきジャイロバイアス誤差の推定及び加速度バイアス誤差の推定と、位置誤差・速度誤差・方位誤差の推定と、を行う拡張カルマンフィルター演算部と、
前記ジャイロバイアス誤差に基づき角速度データのバイアス補正を行い、かつ、前記加速度バイアス誤差に基づき加速度データのバイアス補正を行うバイアス補正部と、
前記バイアス補正された角速度データに基づき姿勢データを演算する姿勢演算部と、
前記バイアス補正された加速度データおよび前記姿勢データに基づきナビゲーションフレームの加速度データを出力する座標変換部と、
前記ナビゲーションフレームの加速度データに基づき位置・速度を演算する位置/速度演算部と、
前記位置/速度演算部が演算した位置・速度および前記姿勢データを、前記拡張カルマンフィルター演算部から出力された位置・速度・方位の推定誤差に基づいて補正するエラー補正部と、
を有し、
前記拡張カルマンフィルター演算部は、前記位置/速度演算部が演算した前記位置・速度と、前記姿勢演算部が演算した前記姿勢データとに基いて、乗算型クォータニオン誤差モデルを用いて前記ジャイロバイアス誤差、前記加速度バイアス誤差および前記位置誤差・速度誤差・方位誤差の推定を行うことを特徴とする測位システム。
【請求項2】
慣性センサーデータとGPS測位データとを融合して移動体の測位を行う測位方法であって、
前記慣性センサーデータに基づき、乗算型クォータニオン誤差モデルを用いる拡張カルマンフィルターの時間更新を行う工程と、
前記GPS測位データに基づき、前記拡張カルマンフィルターの観測更新を行い、位置誤差・速度誤差・方位角誤差、及びジャイロバイアス誤差・加速度バイアス誤差を推定する工程と、
前記推定された位置誤差・速度誤差・方位角誤差に基づき、位置・速度・姿勢の各誤差を補正する工程と、
推定されたジャイロバイアス誤差・加速度バイアス誤差に基づき、慣性センサーデータを補正する工程と
を有し、
前記移動体の位置・速度・姿勢のうち少なくともいずれか一つを求めることを特徴とする測位方法。
【請求項3】
請求項2に記載の測位方法において、
前記方位角誤差及び前記位置誤差の少なくとも一つを、乗算型クォータニオンを用いて誤差モデリングすることを特徴とする測位方法。
【請求項4】
請求項2に記載の測位方法において、
外部から観測された距離情報及び相対速度情報を観測情報として用い、乗算型クォータニオン誤差モデルによって前記移動体の前記位置・速度・方位角の誤差、及び前記ジャイロバイアス誤差・加速度バイアス誤差の推定を行い、前記移動体の前記位置・速度・姿勢を補正することを特徴とする測位方法。
【請求項5】
前記移動体が移動している場合には、請求項2ないし請求項4のいずれか一項に記載の測位方法を用いて測位し、
前記移動体が停止している場合には、速度を0、ヨー角を不変として、さらに加速度センサーの検出値からロール角とピッチ角とを演算して観測値とし、前記観測値に基づき、姿勢の補正及び前記ジャイロバイアス誤差及び前記加速度バイアス誤差の補正を行うことを特徴とする測位方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−173190(P2012−173190A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−36806(P2011−36806)
【出願日】平成23年2月23日(2011.2.23)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月23日(2011.2.23)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]