
測位システム、測位端末装置および測位方法
【課題】測位端末装置が取得した測位データをその都度測位サーバに転送せず、測位サーバが所定のタイミングで転送される測位データに基づいて測位端末装置の測位を精度よく行う。
【課題手段】1秒以内の精度を有する時計と、トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、各同期タイミングのデータと時計から得られる各同期タイミングの測定時刻を記憶するメモリと、該メモリの情報を所定のタイミングで外部に出力する手段とを有する測位端末装置と、測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置のメモリから受け取った同期タイミングのデータと、測位端末装置の測定時刻における衛星情報に基づき、測位端末装置の位置情報を演算する測位サーバとを備える。
【課題手段】1秒以内の精度を有する時計と、トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、各同期タイミングのデータと時計から得られる各同期タイミングの測定時刻を記憶するメモリと、該メモリの情報を所定のタイミングで外部に出力する手段とを有する測位端末装置と、測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置のメモリから受け取った同期タイミングのデータと、測位端末装置の測定時刻における衛星情報に基づき、測位端末装置の位置情報を演算する測位サーバとを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS(Global Positioning System )衛星からの信号を測位端末装置と測位サーバで受信し、測位端末装置で取得・蓄積した測位データを測位サーバに転送し、測位サーバのデータ処理によって測位端末装置の測位を行う測位システム、測位端末装置および測位方法に関する。
【背景技術】
【0002】
GPS測位システムでは、複数のGPS衛星から電波によって、GPS衛星のID情報、時刻情報、航法メッセージなどのデータが送信される。測位端末装置は、受信可能な複数のGPS衛星のそれぞれのデータを長時間(数分程度)受信し、正確な時刻とそれらの複数のGPS衛星からの正確な距離を算出し、その結果とGPS衛星の位置情報から測位端末装置の測位演算を行っている。GPS衛星からの信号は、最小単位がC/A(Coarse/Acquisition )コードと呼ばれる1ms周期の同期検出用信号であり、以降20ms単位のビット、 600ms単位のワード、6秒単位のサブフレーム、30秒のフレームという構成になっている(非特許文献1)。測位するためには、少なくともフレームを数回分取得しなければならず、従って最低でも数分間の受信時間を要する。
【0003】
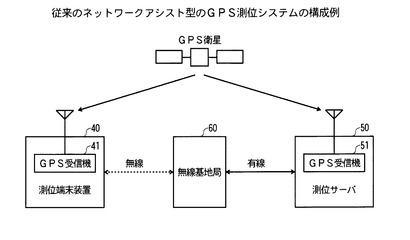
図4は、従来のネットワークアシスト型のGPS測位システムの構成例を示す。
図4において、測位端末装置40はGPS受信機41を備え、GPS受信機41は測位要求に応じてGPS衛星からの信号の受信動作を開始し、受信処理した測位データを無線ネットワークを介して無線基地局60に送信する。無線基地局60は、測位サーバ50と有線ネットワークで接続され、測位端末装置40から受信した測位データを測位サーバ50に送信する。測位サーバ50はGPS受信機51を備え、航法メッセージを常時受信している。
【0004】
測位端末装置40は、測位データとして各GPS衛星の位相制御量と、その時の時計の時刻および位相制御量を計測した航法メッセージのデータの位置を特定可能なビットパターンで送信する。位相制御量は、特定ビットの先頭C/Aコードのようにデータの区切りのよい位置に着目し、各GPS衛星について同じ送信時刻に相当するC/Aコードの相関ピーク取得時刻の時間差を測位データとして用いる。
【0005】
測位サーバ50は、常時受信しているビットパターンからデータを取得した時刻前後のデータについて航法メッセージのパターンマッチングを行い、位相制御量を取得したC/Aコードの位置を特定し、航法メッセージのサブフレーム先頭の時刻情報から当該C/Aコードの送信時刻を特定する。これによりC/Aコード送信時の衛星位置を特定し、測位端末装置40の測位演算を行う。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】「GPSについて基本原理および今後の利用動向」, TESLA(建設電気技術), Vol.131, pp.18-19, 2000.9 ( http://www.kendenkyo.or.jp/pdf/technology/131 basic.pdf )
【発明の概要】
【発明が解決しようとする課題】
【0007】
測位端末装置が測位するためにはGPS衛星電波の長時間の受信が必要であり、消費電力量が大きい。また、ネットワークアシスト型のGPS測位システムでは、測位端末装置の衛星受信時間を節約する方法もあるが、測位データの転送ごとにネットワークを介して測位サーバと通信をしなければならず、これにも消費電力量がかかる。
【0008】
本発明は、測位端末装置が取得した測位データをその都度測位サーバに転送せず、測位サーバが所定のタイミングで転送される測位データに基づいて測位端末装置の測位を精度よく行うことができる測位システム、測位端末装置および測位方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
第1の発明の測位システムは、1秒以内の精度を有する時計と、トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、各同期タイミングのデータと時計から得られる各同期タイミングの測定時刻を記憶するメモリと、該メモリの情報を所定のタイミングで外部に出力する手段とを有する測位端末装置と、測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置のメモリから受け取った同期タイミングのデータと、測位端末装置の測定時刻における衛星情報に基づき、測位端末装置の位置情報を演算する測位サーバとを備える。
【0010】
第1の発明の測位システムにおいて、測位端末装置は、振動を検出する振動センサと、光量を検出する光センサと、該センサ出力が所定値を超えたときにトリガ信号を出力する判定回路とを備える。
【0011】
第1の発明の測位システムにおいて、測位サーバは、測位端末装置から受け取った時系列の複数の同期タイミングの相関をとり、位置情報の演算結果の誤差を修正する構成である。
【0012】
第2の発明の測位方法は、1秒以内の精度を有する時計を備えた測位端末装置は、衛星受信機がトリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定し、各同期タイミングのデータと時計から得られる各同期タイミングの測定時刻をメモリに記憶し、該メモリの情報を所定のタイミングで外部に出力し、測位サーバは、測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置のメモリから同期タイミングのデータを受け取り、そのデータと測位端末装置の測定時刻における衛星情報に基づき、測位端末装置の位置情報を演算する。
【0013】
第2の発明の測位方法において、測位サーバは、測位端末装置から受け取った時系列の複数の同期タイミングの相関をとり、位置情報の演算結果の誤差を修正する。
【0014】
第3の発明は、測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置から受け取った同期タイミングのデータに基づき、測位端末装置の位置情報を演算する測位サーバを備えた測位システムの測位端末装置において、1秒以内の精度を有する時計と、トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、各同期タイミングのデータと時計から得られる各同期タイミングの測定時刻を記憶するメモリと、メモリの情報を所定のタイミングで外部に出力する手段とを備える。
【0015】
第3の発明の測位端末装置において、振動を検出する振動センサと、光量を検出する光センサと、各センサ出力が所定値を超えたときにトリガ信号を出力する判定回路とを備える。
【発明の効果】
【0016】
本発明は、測位端末装置でC/Aコードなどを用いて同期タイミングを測定し、1秒以内の精度を有する時計から得られる同期タイミングの測定時刻とともに端末内部のメモリに保存しておく。測位サーバは、常時衛星からの信号を受信しており、かつ測位端末装置における測位期間のすべてのデータを保存している。測位端末装置が測位サーバに接続する所定のタイミングで、メモリ内にあるデータを測位サーバに送り、測位サーバ内で演算することによって、測位端末装置の測位した時点での正確な位置を計算することができる。これにより、測位端末装置は、測位のための受信時間が最小限でよく、かつ測位のつど通信をしなくてもよいので、消費電力量を極めて低く抑えることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の測位システムの実施例1における測位端末装置および測位サーバの構成例を示す図である。
【図2】本発明の測位システムの実施例2における測位端末装置の構成例を示す図である。
【図3】本発明の測位方法の処理手順例を示す図である。
【図4】従来のネットワークアシスト型のGPS測位システムの構成例を示す図である。
【発明を実施するための形態】
【実施例1】
【0018】
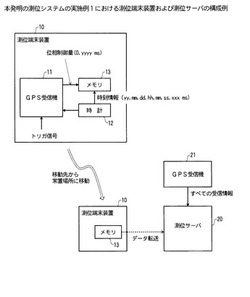
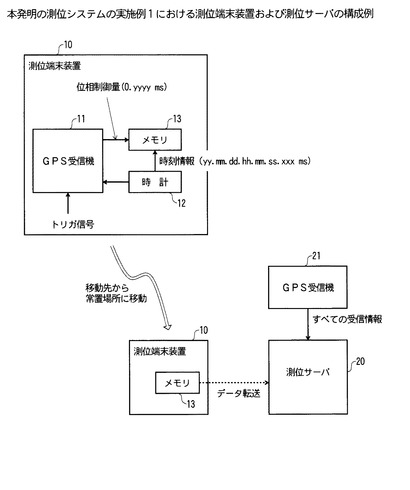
図1は、本発明の測位システムの実施例1における測位端末装置および測位サーバの構成例を示す。
図1において、測位システムを構成する測位端末装置10は、GPS受信機11、時計12、メモリ13を備え、測位サーバ20は、GPS受信機21を内部または外部に備える。
【0019】
測位端末装置10のGPS受信機11は、測位開始のためのトリガ信号を入力すると、最も近いタイミングの秒の始めにおいてGPS衛星からの信号の受信を開始し、複数のGPS衛星について、たとえばC/Aコードの同期が取れた時点で受信を停止し、それぞれの位相制御量を算出する。このとき、GPS衛星の信号はどのフレームの信号なのか、またはどのワードの信号なのかはわからないが、C/Aコードの時間単位である1ms以下のケタについては正確に位相制御量が算出される。一方、測位端末装置10は正確な秒単位の時計12(例えば電波時計)を有しており、その絶対精度は1秒以下である。
【0020】
ここで、C/Aコードの同期タイミングだけを取得すれば、測位端末装置10における位相制御量を1ms以下の精度で取得できる。このとき、時計12の精度が1ms以下であれば、図1に示すように、1ms以上の位を時計12から取得し、かつ1ms以下の位をC/Aコードの同期結果をもとに取得して、それぞれを組み合わせることによって正確な位相制御量を取得できる。
【0021】
また、時計12の精度が20ms以下であれば、GPS衛星の信号をビット単位で受信し、ビットの先頭C/Aコードを検出して位相制御量を算出すれば、同様にビットの時間単位である20ms以下の精度で位相制御量を取得できる。このとき、20ms以上の位を時計12から取得し、かつ20ms以下の位をビットおよびC/Aコードの同期結果をもとに取得して、それらを組み合わせることによって正確な位相制御量が取得できる。
【0022】
また、時計12の精度が1秒以下であれば、GPS衛星の信号をワード単位で受信し、ワードの先頭ビットの先頭C/Aコードを検出して位相制御量を算出すれば、同様にワードの時間単位である 600ms以下の精度で位相制御量を取得できる。このとき、1秒以上の位を時計12から取得し、かつ1秒以下の位をワードおよびC/Aコードの同期結果をもとに取得して、それらを組み合わせることによって正確な位相制御量が取得できる。
【0023】
以上により、時計12の精度が1秒以下、あるいは20ms以下、あるいは1ms以下であれば、上記のいずれかの方法に応じた精度で位相制御量を取得できる。
【0024】
このようにして取得した位相制御量は、時計12の時刻情報と共に、測位端末装置10のメモリ13に入力され保存され、測位サーバ20への転送は行わない。測位端末装置10はデータを保存した後に待機状態になり、バッテリー駆動の測位端末装置10の電力消費を最小限にする。ただし、時計12は継続して動作する必要がある。以下、測位トリガ信号が入力されるたびに同一の動作を繰り返す。
【0025】
次に、測位端末装置10が測位サーバ20に接続できる状態になった場合、例えば移動していた測位端末装置10がその常置場所に戻って外部電源の使用が可能になった場合、測位サーバ20との通信手段(図示せず)を介してメモリ13に保存したデータを測位サーバ20に転送する。メモリデータの転送方法は、測位端末装置10がネットワークを介して測位サーバ20に転送してもよいし、測位端末装置10と測位サーバ20が直接、無線または有線で接続して転送してもよい。
【0026】
測位サーバ20は、測位端末装置10が測位をあらかじめ想定している時間帯のすべての衛星情報を、測位端末装置10とは別のGPS受信機21を用いて取得し、保存している。測位サーバ20は、測位端末装置10からいくつかの衛星の位相制御量のデータが転送されると、そのデータと、測位端末装置10が測位した時刻における航法データと測位サーバ20が予め保存しているデータの一部をもとに、通常のGPS測位と同様の方法により測位端末装置10の正確な位置を算出し、出力する。これで測位端末装置10の測位が終了する。
【0027】
以下に、このようにして取得したデータの総量と、消費電力量の簡略な見積もりを示す。C/Aコードの場合、チップレートが約1MHzで、これに同期して位相制御量を算出する精度は概ね1μsec から 0.1μsec である。したがって、位相制御量を 0.1μsec 単位で測定して、C/Aコードの単位である1ms内のどのタイミングにあるかの情報のみを送ればよく、ほぼ4桁から5桁の情報を受信した衛星毎にデータを取得すればよい。したがって、メモリに保存するデータ量は、1測位点あたり、位相制御量(0.01〜0.1 μsec 単位)4〜5桁分、および接待時刻(年・月・日・時間・分・秒)の最大12桁となり、仮に衛星を6個受信するとすれば、合計で42桁、すなわち 140ビット程度の情報量となる。したがって、たとえば毎分測位データを取得して1週間継続しても、高々 200kバイト程度でよいことになる。
【0028】
このとき、GPS受信機の動作時消費電流を10mA、1測位あたりの動作時間を 0.1秒とすると、毎分測定の1ヶ月で端末の予想される衛星受信用総エネルギーは、約84mAHとなり、比較的小型の電池で動作可能であるとわかる。一方、従来技術で毎分の測位を実現しようとすると、常時通電しておく必要があるから、50000 mAHとなって巨大な電池を搭載する必要がある。ここで、本発明による1測位あたりの動作時間を 0.1秒としたが、本来は1ms幅のC/Aコードの相互相関が計測できる時間であればよく、さらに短い動作時間を想定することもできるが、回路の起動時間などを考慮して大きめの値を用いている。
【実施例2】
【0029】
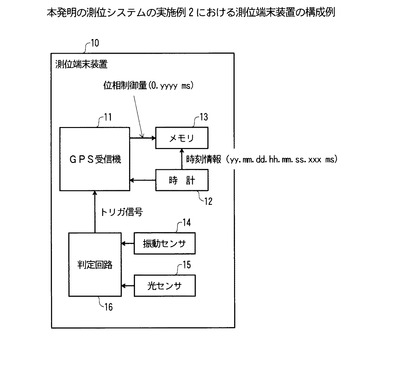
図2は、本発明の測位システムの実施例2における測位端末装置の構成例を示す。
図2において、測位端末装置10の基本構成は図1の実施例1と同様であるが、振動センサ14および光センサ15と、各センサデータの判定処理を行う判定回路16とを有し、その判定回路16の出力を測位開始のトリガ信号とする構成である。
【0030】
判定回路16は、振動センサ14によって検出される振動量および光センサ15によって検出される光量がそれぞれ所定値よりも大きい場合にトリガ信号を出力する。この条件とは、測位端末装置10が何らかの移動をした瞬間であり、またある程度以上明るいということは屋外にいる可能性があることに相当する。すなわち、移動をとらえるために測位をする必要もあるし、屋外で明るければ確実に衛星からの信号を受信できる条件であると言えるので、有効なデータを取得することができる。逆に、振動がなければ、測位端末装置10は移動していないことになるので、頻繁に測位しても意味がないことになる。
【0031】
また、振動も光も、これらによって発電することができるので、たとえば小型振動発電機や小型太陽電池を電源として接続することによって、外部電源や電池のない環境でも、この低消費電力な測位端末装置を動作させることができる。逆に、それらの発電機が発電できない環境では、端末が動いていない、あるいは屋内などの衛星が見えない位置にいるなどの理由で、測位しなくてもよい状態であると見なすこともでき、測位の必要性に応じて自動的に測位ができる測位端末装置が実現される。センサ出力をトリガとするレベルについては、測位をしたい場面に応じて予めセットしておくこともできる。
【実施例3】
【0032】
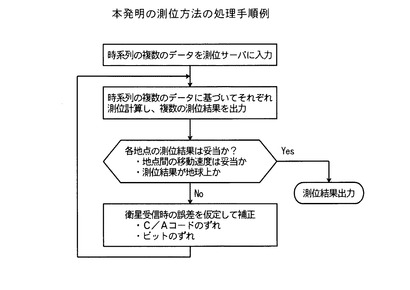
図3は、本発明の測位方法の処理手順の一例を示す。
測位端末装置が取得するデータには、測位端末装置が衛星電波を受信する時間を最低限に短縮していることなどが原因で、誤差を含んだものである可能性がある。
【0033】
測位端末装置は、時系列の複数のデータを測位サーバに入力する。測位サーバは、実施例1で説明した方法により、時系列の複数のデータに基づいてそれぞれ測位計算し、各地点に対応する複数の測位結果を出力する。次に、各地点の測位結果が妥当か否かを判定し、妥当なものであれば測位結果を出力する。
【0034】
ここで、時系列の複数のデータは、測位端末装置が移動した履歴に対応しているので、これを用いて測位データを補正することが可能である。過去のデータから、例えば予想される移動速度を見積もり、その速度を大幅に超えた移動があった場合には測定誤差として補正する。また、従来技術でも行われているように、衛星受信時のさまざまな誤差によって、測位位置が3次元的に地球上にない場合なども補正する。
【0035】
また、例えば時計の精度が想定外に1ms以上であった場合(すなわち、秒単位の精度は有しているが、1msまでの精度は有していない場合)には、測定開始のトリガからすぐに検出したC/Aコードの結果が、本来測定すべきC/Aコードからずれている可能性がある。しかし、時系列的に複数の場所で測定をしているので、仮にすべてのデータにおいてC/Aコードのずれが一定であった場合、測位サーバにおいて、最も尤もらしい測位結果を導出する時刻誤差(C/Aコードのずれ量)を割り出し、それを前提に測位することが可能になる。
【符号の説明】
【0036】
10 測位端末装置
11 GPS受信機
12 時計
13 メモリ
14 振動センサ
15 光センサ
16 判定回路
20 測位サーバ
21 GPS受信機
【技術分野】
【0001】
本発明は、GPS(Global Positioning System )衛星からの信号を測位端末装置と測位サーバで受信し、測位端末装置で取得・蓄積した測位データを測位サーバに転送し、測位サーバのデータ処理によって測位端末装置の測位を行う測位システム、測位端末装置および測位方法に関する。
【背景技術】
【0002】
GPS測位システムでは、複数のGPS衛星から電波によって、GPS衛星のID情報、時刻情報、航法メッセージなどのデータが送信される。測位端末装置は、受信可能な複数のGPS衛星のそれぞれのデータを長時間(数分程度)受信し、正確な時刻とそれらの複数のGPS衛星からの正確な距離を算出し、その結果とGPS衛星の位置情報から測位端末装置の測位演算を行っている。GPS衛星からの信号は、最小単位がC/A(Coarse/Acquisition )コードと呼ばれる1ms周期の同期検出用信号であり、以降20ms単位のビット、 600ms単位のワード、6秒単位のサブフレーム、30秒のフレームという構成になっている(非特許文献1)。測位するためには、少なくともフレームを数回分取得しなければならず、従って最低でも数分間の受信時間を要する。
【0003】
図4は、従来のネットワークアシスト型のGPS測位システムの構成例を示す。
図4において、測位端末装置40はGPS受信機41を備え、GPS受信機41は測位要求に応じてGPS衛星からの信号の受信動作を開始し、受信処理した測位データを無線ネットワークを介して無線基地局60に送信する。無線基地局60は、測位サーバ50と有線ネットワークで接続され、測位端末装置40から受信した測位データを測位サーバ50に送信する。測位サーバ50はGPS受信機51を備え、航法メッセージを常時受信している。
【0004】
測位端末装置40は、測位データとして各GPS衛星の位相制御量と、その時の時計の時刻および位相制御量を計測した航法メッセージのデータの位置を特定可能なビットパターンで送信する。位相制御量は、特定ビットの先頭C/Aコードのようにデータの区切りのよい位置に着目し、各GPS衛星について同じ送信時刻に相当するC/Aコードの相関ピーク取得時刻の時間差を測位データとして用いる。
【0005】
測位サーバ50は、常時受信しているビットパターンからデータを取得した時刻前後のデータについて航法メッセージのパターンマッチングを行い、位相制御量を取得したC/Aコードの位置を特定し、航法メッセージのサブフレーム先頭の時刻情報から当該C/Aコードの送信時刻を特定する。これによりC/Aコード送信時の衛星位置を特定し、測位端末装置40の測位演算を行う。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】「GPSについて基本原理および今後の利用動向」, TESLA(建設電気技術), Vol.131, pp.18-19, 2000.9 ( http://www.kendenkyo.or.jp/pdf/technology/131 basic.pdf )
【発明の概要】
【発明が解決しようとする課題】
【0007】
測位端末装置が測位するためにはGPS衛星電波の長時間の受信が必要であり、消費電力量が大きい。また、ネットワークアシスト型のGPS測位システムでは、測位端末装置の衛星受信時間を節約する方法もあるが、測位データの転送ごとにネットワークを介して測位サーバと通信をしなければならず、これにも消費電力量がかかる。
【0008】
本発明は、測位端末装置が取得した測位データをその都度測位サーバに転送せず、測位サーバが所定のタイミングで転送される測位データに基づいて測位端末装置の測位を精度よく行うことができる測位システム、測位端末装置および測位方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
第1の発明の測位システムは、1秒以内の精度を有する時計と、トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、各同期タイミングのデータと時計から得られる各同期タイミングの測定時刻を記憶するメモリと、該メモリの情報を所定のタイミングで外部に出力する手段とを有する測位端末装置と、測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置のメモリから受け取った同期タイミングのデータと、測位端末装置の測定時刻における衛星情報に基づき、測位端末装置の位置情報を演算する測位サーバとを備える。
【0010】
第1の発明の測位システムにおいて、測位端末装置は、振動を検出する振動センサと、光量を検出する光センサと、該センサ出力が所定値を超えたときにトリガ信号を出力する判定回路とを備える。
【0011】
第1の発明の測位システムにおいて、測位サーバは、測位端末装置から受け取った時系列の複数の同期タイミングの相関をとり、位置情報の演算結果の誤差を修正する構成である。
【0012】
第2の発明の測位方法は、1秒以内の精度を有する時計を備えた測位端末装置は、衛星受信機がトリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定し、各同期タイミングのデータと時計から得られる各同期タイミングの測定時刻をメモリに記憶し、該メモリの情報を所定のタイミングで外部に出力し、測位サーバは、測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置のメモリから同期タイミングのデータを受け取り、そのデータと測位端末装置の測定時刻における衛星情報に基づき、測位端末装置の位置情報を演算する。
【0013】
第2の発明の測位方法において、測位サーバは、測位端末装置から受け取った時系列の複数の同期タイミングの相関をとり、位置情報の演算結果の誤差を修正する。
【0014】
第3の発明は、測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置から受け取った同期タイミングのデータに基づき、測位端末装置の位置情報を演算する測位サーバを備えた測位システムの測位端末装置において、1秒以内の精度を有する時計と、トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、各同期タイミングのデータと時計から得られる各同期タイミングの測定時刻を記憶するメモリと、メモリの情報を所定のタイミングで外部に出力する手段とを備える。
【0015】
第3の発明の測位端末装置において、振動を検出する振動センサと、光量を検出する光センサと、各センサ出力が所定値を超えたときにトリガ信号を出力する判定回路とを備える。
【発明の効果】
【0016】
本発明は、測位端末装置でC/Aコードなどを用いて同期タイミングを測定し、1秒以内の精度を有する時計から得られる同期タイミングの測定時刻とともに端末内部のメモリに保存しておく。測位サーバは、常時衛星からの信号を受信しており、かつ測位端末装置における測位期間のすべてのデータを保存している。測位端末装置が測位サーバに接続する所定のタイミングで、メモリ内にあるデータを測位サーバに送り、測位サーバ内で演算することによって、測位端末装置の測位した時点での正確な位置を計算することができる。これにより、測位端末装置は、測位のための受信時間が最小限でよく、かつ測位のつど通信をしなくてもよいので、消費電力量を極めて低く抑えることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の測位システムの実施例1における測位端末装置および測位サーバの構成例を示す図である。
【図2】本発明の測位システムの実施例2における測位端末装置の構成例を示す図である。
【図3】本発明の測位方法の処理手順例を示す図である。
【図4】従来のネットワークアシスト型のGPS測位システムの構成例を示す図である。
【発明を実施するための形態】
【実施例1】
【0018】
図1は、本発明の測位システムの実施例1における測位端末装置および測位サーバの構成例を示す。
図1において、測位システムを構成する測位端末装置10は、GPS受信機11、時計12、メモリ13を備え、測位サーバ20は、GPS受信機21を内部または外部に備える。
【0019】
測位端末装置10のGPS受信機11は、測位開始のためのトリガ信号を入力すると、最も近いタイミングの秒の始めにおいてGPS衛星からの信号の受信を開始し、複数のGPS衛星について、たとえばC/Aコードの同期が取れた時点で受信を停止し、それぞれの位相制御量を算出する。このとき、GPS衛星の信号はどのフレームの信号なのか、またはどのワードの信号なのかはわからないが、C/Aコードの時間単位である1ms以下のケタについては正確に位相制御量が算出される。一方、測位端末装置10は正確な秒単位の時計12(例えば電波時計)を有しており、その絶対精度は1秒以下である。
【0020】
ここで、C/Aコードの同期タイミングだけを取得すれば、測位端末装置10における位相制御量を1ms以下の精度で取得できる。このとき、時計12の精度が1ms以下であれば、図1に示すように、1ms以上の位を時計12から取得し、かつ1ms以下の位をC/Aコードの同期結果をもとに取得して、それぞれを組み合わせることによって正確な位相制御量を取得できる。
【0021】
また、時計12の精度が20ms以下であれば、GPS衛星の信号をビット単位で受信し、ビットの先頭C/Aコードを検出して位相制御量を算出すれば、同様にビットの時間単位である20ms以下の精度で位相制御量を取得できる。このとき、20ms以上の位を時計12から取得し、かつ20ms以下の位をビットおよびC/Aコードの同期結果をもとに取得して、それらを組み合わせることによって正確な位相制御量が取得できる。
【0022】
また、時計12の精度が1秒以下であれば、GPS衛星の信号をワード単位で受信し、ワードの先頭ビットの先頭C/Aコードを検出して位相制御量を算出すれば、同様にワードの時間単位である 600ms以下の精度で位相制御量を取得できる。このとき、1秒以上の位を時計12から取得し、かつ1秒以下の位をワードおよびC/Aコードの同期結果をもとに取得して、それらを組み合わせることによって正確な位相制御量が取得できる。
【0023】
以上により、時計12の精度が1秒以下、あるいは20ms以下、あるいは1ms以下であれば、上記のいずれかの方法に応じた精度で位相制御量を取得できる。
【0024】
このようにして取得した位相制御量は、時計12の時刻情報と共に、測位端末装置10のメモリ13に入力され保存され、測位サーバ20への転送は行わない。測位端末装置10はデータを保存した後に待機状態になり、バッテリー駆動の測位端末装置10の電力消費を最小限にする。ただし、時計12は継続して動作する必要がある。以下、測位トリガ信号が入力されるたびに同一の動作を繰り返す。
【0025】
次に、測位端末装置10が測位サーバ20に接続できる状態になった場合、例えば移動していた測位端末装置10がその常置場所に戻って外部電源の使用が可能になった場合、測位サーバ20との通信手段(図示せず)を介してメモリ13に保存したデータを測位サーバ20に転送する。メモリデータの転送方法は、測位端末装置10がネットワークを介して測位サーバ20に転送してもよいし、測位端末装置10と測位サーバ20が直接、無線または有線で接続して転送してもよい。
【0026】
測位サーバ20は、測位端末装置10が測位をあらかじめ想定している時間帯のすべての衛星情報を、測位端末装置10とは別のGPS受信機21を用いて取得し、保存している。測位サーバ20は、測位端末装置10からいくつかの衛星の位相制御量のデータが転送されると、そのデータと、測位端末装置10が測位した時刻における航法データと測位サーバ20が予め保存しているデータの一部をもとに、通常のGPS測位と同様の方法により測位端末装置10の正確な位置を算出し、出力する。これで測位端末装置10の測位が終了する。
【0027】
以下に、このようにして取得したデータの総量と、消費電力量の簡略な見積もりを示す。C/Aコードの場合、チップレートが約1MHzで、これに同期して位相制御量を算出する精度は概ね1μsec から 0.1μsec である。したがって、位相制御量を 0.1μsec 単位で測定して、C/Aコードの単位である1ms内のどのタイミングにあるかの情報のみを送ればよく、ほぼ4桁から5桁の情報を受信した衛星毎にデータを取得すればよい。したがって、メモリに保存するデータ量は、1測位点あたり、位相制御量(0.01〜0.1 μsec 単位)4〜5桁分、および接待時刻(年・月・日・時間・分・秒)の最大12桁となり、仮に衛星を6個受信するとすれば、合計で42桁、すなわち 140ビット程度の情報量となる。したがって、たとえば毎分測位データを取得して1週間継続しても、高々 200kバイト程度でよいことになる。
【0028】
このとき、GPS受信機の動作時消費電流を10mA、1測位あたりの動作時間を 0.1秒とすると、毎分測定の1ヶ月で端末の予想される衛星受信用総エネルギーは、約84mAHとなり、比較的小型の電池で動作可能であるとわかる。一方、従来技術で毎分の測位を実現しようとすると、常時通電しておく必要があるから、50000 mAHとなって巨大な電池を搭載する必要がある。ここで、本発明による1測位あたりの動作時間を 0.1秒としたが、本来は1ms幅のC/Aコードの相互相関が計測できる時間であればよく、さらに短い動作時間を想定することもできるが、回路の起動時間などを考慮して大きめの値を用いている。
【実施例2】
【0029】
図2は、本発明の測位システムの実施例2における測位端末装置の構成例を示す。
図2において、測位端末装置10の基本構成は図1の実施例1と同様であるが、振動センサ14および光センサ15と、各センサデータの判定処理を行う判定回路16とを有し、その判定回路16の出力を測位開始のトリガ信号とする構成である。
【0030】
判定回路16は、振動センサ14によって検出される振動量および光センサ15によって検出される光量がそれぞれ所定値よりも大きい場合にトリガ信号を出力する。この条件とは、測位端末装置10が何らかの移動をした瞬間であり、またある程度以上明るいということは屋外にいる可能性があることに相当する。すなわち、移動をとらえるために測位をする必要もあるし、屋外で明るければ確実に衛星からの信号を受信できる条件であると言えるので、有効なデータを取得することができる。逆に、振動がなければ、測位端末装置10は移動していないことになるので、頻繁に測位しても意味がないことになる。
【0031】
また、振動も光も、これらによって発電することができるので、たとえば小型振動発電機や小型太陽電池を電源として接続することによって、外部電源や電池のない環境でも、この低消費電力な測位端末装置を動作させることができる。逆に、それらの発電機が発電できない環境では、端末が動いていない、あるいは屋内などの衛星が見えない位置にいるなどの理由で、測位しなくてもよい状態であると見なすこともでき、測位の必要性に応じて自動的に測位ができる測位端末装置が実現される。センサ出力をトリガとするレベルについては、測位をしたい場面に応じて予めセットしておくこともできる。
【実施例3】
【0032】
図3は、本発明の測位方法の処理手順の一例を示す。
測位端末装置が取得するデータには、測位端末装置が衛星電波を受信する時間を最低限に短縮していることなどが原因で、誤差を含んだものである可能性がある。
【0033】
測位端末装置は、時系列の複数のデータを測位サーバに入力する。測位サーバは、実施例1で説明した方法により、時系列の複数のデータに基づいてそれぞれ測位計算し、各地点に対応する複数の測位結果を出力する。次に、各地点の測位結果が妥当か否かを判定し、妥当なものであれば測位結果を出力する。
【0034】
ここで、時系列の複数のデータは、測位端末装置が移動した履歴に対応しているので、これを用いて測位データを補正することが可能である。過去のデータから、例えば予想される移動速度を見積もり、その速度を大幅に超えた移動があった場合には測定誤差として補正する。また、従来技術でも行われているように、衛星受信時のさまざまな誤差によって、測位位置が3次元的に地球上にない場合なども補正する。
【0035】
また、例えば時計の精度が想定外に1ms以上であった場合(すなわち、秒単位の精度は有しているが、1msまでの精度は有していない場合)には、測定開始のトリガからすぐに検出したC/Aコードの結果が、本来測定すべきC/Aコードからずれている可能性がある。しかし、時系列的に複数の場所で測定をしているので、仮にすべてのデータにおいてC/Aコードのずれが一定であった場合、測位サーバにおいて、最も尤もらしい測位結果を導出する時刻誤差(C/Aコードのずれ量)を割り出し、それを前提に測位することが可能になる。
【符号の説明】
【0036】
10 測位端末装置
11 GPS受信機
12 時計
13 メモリ
14 振動センサ
15 光センサ
16 判定回路
20 測位サーバ
21 GPS受信機
【特許請求の範囲】
【請求項1】
1秒以内の精度を有する時計と、トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、各同期タイミングのデータと前記時計から得られる各同期タイミングの測定時刻を記憶するメモリと、該メモリの情報を所定のタイミングで外部に出力する手段とを有する測位端末装置と、
前記測位端末装置における測位期間のすべての時間について前記衛星からすべての衛星情報を取得しておき、前記測位端末装置のメモリから受け取った前記同期タイミングのデータと、前記測位端末装置の測定時刻における衛星情報に基づき、前記測位端末装置の位置情報を演算する測位サーバと
を備えたことを特徴とする測位システム。
【請求項2】
請求項1に記載の測位システムにおいて、
前記測位端末装置は、振動を検出する振動センサと、光量を検出する光センサと、該センサ出力が所定値を超えたときに前記トリガ信号を出力する判定回路とを備えた
ことを特徴とする測位システム。
【請求項3】
請求項1に記載の測位システムにおいて、
前記測位サーバは、前記測位端末装置から受け取った時系列の複数の同期タイミングの相関をとり、位置情報の演算結果の誤差を修正する構成である
ことを特徴とした測位システム。
【請求項4】
1秒以内の精度を有する時計を備えた測位端末装置は、衛星受信機がトリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定し、各同期タイミングのデータと前記時計から得られる各同期タイミングの測定時刻をメモリに記憶し、該メモリの情報を所定のタイミングで外部に出力し、
測位サーバは、前記測位端末装置における測位期間のすべての時間について前記衛星からすべての衛星情報を取得しておき、前記測位端末装置のメモリから前記同期タイミングのデータを受け取り、そのデータと前記測位端末装置の測定時刻における衛星情報に基づき、前記測位端末装置の位置情報を演算する
ことを特徴とする測位方法。
【請求項5】
請求項4に記載の測位方法において、
前記測位サーバは、前記測位端末装置から受け取った時系列の複数の同期タイミングの相関をとり、位置情報の演算結果の誤差を修正する
ことを特徴とした測位方法。
【請求項6】
測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置から受け取った同期タイミングのデータに基づき、測位端末装置の位置情報を演算する測位サーバを備えた測位システムの測位端末装置において、
1秒以内の精度を有する時計と、
トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、
前記各同期タイミングのデータと前記時計から得られる各同期タイミングの測定時刻を記憶するメモリと、
前記メモリの情報を所定のタイミングで外部に出力する手段と
を備えたことを特徴とする測位端末装置。
【請求項7】
請求項6に記載の測位端末装置において、
振動を検出する振動センサと、
光量を検出する光センサと、
前記各センサ出力が所定値を超えたときに前記トリガ信号を出力する判定回路と
を備えたことを特徴とする測位端末装置。
【請求項1】
1秒以内の精度を有する時計と、トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、各同期タイミングのデータと前記時計から得られる各同期タイミングの測定時刻を記憶するメモリと、該メモリの情報を所定のタイミングで外部に出力する手段とを有する測位端末装置と、
前記測位端末装置における測位期間のすべての時間について前記衛星からすべての衛星情報を取得しておき、前記測位端末装置のメモリから受け取った前記同期タイミングのデータと、前記測位端末装置の測定時刻における衛星情報に基づき、前記測位端末装置の位置情報を演算する測位サーバと
を備えたことを特徴とする測位システム。
【請求項2】
請求項1に記載の測位システムにおいて、
前記測位端末装置は、振動を検出する振動センサと、光量を検出する光センサと、該センサ出力が所定値を超えたときに前記トリガ信号を出力する判定回路とを備えた
ことを特徴とする測位システム。
【請求項3】
請求項1に記載の測位システムにおいて、
前記測位サーバは、前記測位端末装置から受け取った時系列の複数の同期タイミングの相関をとり、位置情報の演算結果の誤差を修正する構成である
ことを特徴とした測位システム。
【請求項4】
1秒以内の精度を有する時計を備えた測位端末装置は、衛星受信機がトリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定し、各同期タイミングのデータと前記時計から得られる各同期タイミングの測定時刻をメモリに記憶し、該メモリの情報を所定のタイミングで外部に出力し、
測位サーバは、前記測位端末装置における測位期間のすべての時間について前記衛星からすべての衛星情報を取得しておき、前記測位端末装置のメモリから前記同期タイミングのデータを受け取り、そのデータと前記測位端末装置の測定時刻における衛星情報に基づき、前記測位端末装置の位置情報を演算する
ことを特徴とする測位方法。
【請求項5】
請求項4に記載の測位方法において、
前記測位サーバは、前記測位端末装置から受け取った時系列の複数の同期タイミングの相関をとり、位置情報の演算結果の誤差を修正する
ことを特徴とした測位方法。
【請求項6】
測位端末装置における測位期間のすべての時間について衛星からすべての衛星情報を取得しておき、測位端末装置から受け取った同期タイミングのデータに基づき、測位端末装置の位置情報を演算する測位サーバを備えた測位システムの測位端末装置において、
1秒以内の精度を有する時計と、
トリガ信号の入力により複数の衛星からの信号を受信してそれぞれの同期タイミングを測定する衛星受信機と、
前記各同期タイミングのデータと前記時計から得られる各同期タイミングの測定時刻を記憶するメモリと、
前記メモリの情報を所定のタイミングで外部に出力する手段と
を備えたことを特徴とする測位端末装置。
【請求項7】
請求項6に記載の測位端末装置において、
振動を検出する振動センサと、
光量を検出する光センサと、
前記各センサ出力が所定値を超えたときに前記トリガ信号を出力する判定回路と
を備えたことを特徴とする測位端末装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−61170(P2013−61170A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−198251(P2011−198251)
【出願日】平成23年9月12日(2011.9.12)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月12日(2011.9.12)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
[ Back to top ]