
測位システム及び処理装置
【課題】電波の見通し環境が得られない空間において、センサ、無線タグ、通信端末装置等が取り付けられていない移動物体の位置を測定する。
【解決手段】処理装置は、端末装置が取り付けられた第1の移動物体による受信波形の第1の解析結果と前記端末装置の位置とを対応付けてデータベース装置に記録し、端末装置等が取り付けられていない第2の移動物体による受信波形を得た場合は、該受信波形の第2の解析結果とデータベース装置に記録された第1の解析結果とを比較し、該当する結果を得た場合の端末装置の位置を第2の移動物体の位置として出力する。
【解決手段】処理装置は、端末装置が取り付けられた第1の移動物体による受信波形の第1の解析結果と前記端末装置の位置とを対応付けてデータベース装置に記録し、端末装置等が取り付けられていない第2の移動物体による受信波形を得た場合は、該受信波形の第2の解析結果とデータベース装置に記録された第1の解析結果とを比較し、該当する結果を得た場合の端末装置の位置を第2の移動物体の位置として出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測位システムに関し、特に、電波の見通し環境が得られないような空間においてセンサ、通信端末装置等が取り付けられていない移動物体(例えば、人間及び自律走行機器等)の位置を無線信号の受信波形の変化によって測定するシステム及び装置に関する。
【背景技術】
【0002】
物品のトレース、セキュリティ等においては、移動物体の存在を検出する方法及び位置を測定する方法が必要である。その方法として、これまでに、大きく分けて二つの方法が知られている。
【0003】
第1の方法は、センサ、無線タグ、通信端末装置等を取り付けることが困難な移動物体の位置を測定するために、送受信機が電波、超音波等を移動物体に指向させて送信し、その反射波を受信するまでの往復時間を計測することによって、移動物体と送受信機との距離を測定する方法である(例えば、特許文献1参照。)。
【0004】
第2の方法は、見通し環境が得られない空間であって、電波、超音波等を移動物体に指向させることができない場合の移動物体の検出方法として、無線信号を送信機より送信し、受信機で受信した無線信号の遅延プロファイルの変化から、移動物体を検出する方法である(例えば、特許文献2及び特許文献3参照。)。遅延プロファイルは、送信機から受信機に直接到達した信号だけでなく、障害物等を反射して遅れて受信機に到達した信号も含めた受信信号強度の時間的プロファイルを示す分布であり、見通し環境外であっても移動物体が存在すれば、この強度分布が変化する。よって、遅延プロファイルの変化を検出することによって、見通し環境が得られない空間に存在する移動物体を検出することができる。
【特許文献1】特開平10−39015号公報
【特許文献2】特開平5−166074号公報
【特許文献3】特開2003−185735号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
屋内のように障害物によって無線機と移動物体との見通し環境が得にくい場合、第1の方法では、無線機と移動物体間との間の電波の伝播時間を正確に測ることができないため、移動物体の位置を測定することは困難である。
【0006】
また、第2の方法では、遅延プロファイルの変化を比較することによって移動物体の存在は検出できるものの、その移動物体の位置を測定することは不可能である。
【0007】
本発明は、屋内のように障害物によって無線機と移動物体との見通しが得にくい環境において、センサ、無線タグ、通信端末装置等を取り付けることが困難な移動物体に、これを取り付けることなく、その移動物体の位置を測定する測位システムを提供する。
【課題を解決するための手段】
【0008】
本発明の代表的な一例を示せば以下のとおりである。すなわち、第1の発明は、受信した信号の波形の解析結果を用いて、移動物体の位置を測定する測位システムであって、第1の移動物体に取り付けられた端末装置の位置を測定する端末位置測定装置と、少なくとも送信機を備える第1の無線装置と、少なくとも受信機を備える第2の無線装置と、前記第1の無線装置が送信した直接波、及び、第1の移動物体によって反射した反射波による信号の波形を解析して、第1の解析結果を生成する処理装置と、前記処理装置によって生成された第1の解析結果と前記第1の移動物体の位置とを記録するデータベースと、を備え、前記処理装置は、前記端末位置測定装置によって測定された前記端末装置の位置と前記第1の解析結果とを対応させて前記データベースに記録し、前記第1の無線装置が送信した直接波、及び、第2の移動物体によって反射した反射波による信号の波形を取得した場合、該取得した波形から生成された第2の解析結果と、前記データベースに記録された第1の解析結果とを比較し、前記第2の解析結果が前記第1の解析結果に該当すると判定された場合に、当該該当する第1の解析結果に対応する端末装置の位置を、前記第2の移動物体の位置と決定することを特徴とする。
【発明の効果】
【0009】
本発明の一実施形態によれば、センサ、無線タグ、通信端末装置等を取り付けることが困難な移動物体にそれらを取り付けることなく、その移動物体の位置を測定することができる。
【発明を実施するための最良の形態】
【0010】
<実施形態1>
本発明の第1の実施の形態について、図1から図8を用いて説明する。
【0011】
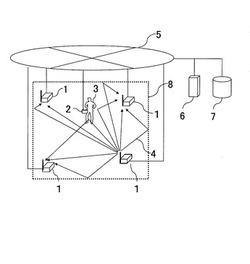
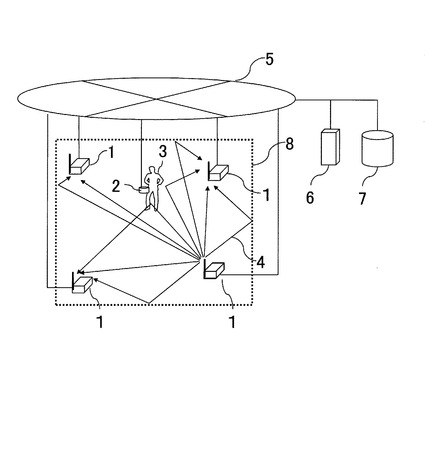
図1は、本発明の第1の実施の形態の測位システムの構成図である。
【0012】
測位システムは、端末装置2、複数の無線機1、処理装置6及びデータベース装置7を備え、各装置は無線回線又は有線回線によるネットワーク5によって接続される。
【0013】
無線機1は、無線信号を送信する機能及び空間8を伝播した無線信号を受信する機能を備え、ネットワーク5によって接続された処理装置6へ前記無線信号の受信波形を伝送する機能を備える。なお、空間8に送信する無線信号はUWBインパルス無線信号4を使用する。ここで、UWB(Ultra Wide Band)では、非常に広い周波数帯域を使った無線伝送方式の一つで、数ナノ秒以下のパルス信号が使用される。
【0014】
また、無線機1は、見通し環境が得られないような空間8、例えば、屋内空間に複数台設置され、複数の定点において空間8の電波伝播環境によって変化する受信波形のパターンを計測する。
【0015】
第1の無線機1は、空間8に向けてUWBインパルス無線信号4を送信し、第1の無線機1以外の少なくとも1台以上の第2の無線機1は、空間8を伝播したUWBインパルス無線信号4を受信する。このとき、UWBインパルス無線信号4を送信した第1の無線機1は、その送信を通知するトリガを信号生成制御部12において作成し、ネットワーク5を経由して第2の無線機1に通知してもよい。
【0016】
なお、あらかじめ定められた第1の無線機1のみが継続的にUWBインパルス無線信号4を送信するのではなく、所定の時間毎に送信機となる第1の無線機1と受信機となる第2の無線機1とが順次入れ替わることによって、無線機1の配置を変えることなく、より多くの定点から受信波形のパターンを得ることができる。
【0017】
この場合、UWBインパルス無線信号4の送信元がどの無線機1であるかを特定するために、それぞれの無線機1に割り当てられた固有のIDをUWBインパルス無線信号4に含ませて送信する必要がある。固有のIDを送信信号に付加する方法としては、UWBインパルス無線信号4のインパルス列の正負のパターンを利用する方法が考えられる。
【0018】
端末装置2は、第1の移動物体3(例えば、人間、動物、自律走行機器等)に取り付けられ、自己の位置を測定する機能及びネットワーク5によって接続された処理装置6へ自己の位置を伝送する機能を備える。
【0019】
端末装置2が取り付けられた第1の移動物体3が空間8内を移動する場合、端末装置2は自己の位置を逐次測定して、測定した位置を移動物体3の位置として処理装置6に伝送する。
【0020】
UWBインパルス無線信号4は、空間8内を伝播し、少なくとも1台以上の無線機1によって受信される。このUWBインパルス無線信号4は、あらかじめ定められた1台の無線機1から送信されてもよいし、複数の無線機1が順に送信と受信の役割を交替し、送信の役割となった無線機1から送信されてもよい。このとき、UWBインパルス無線信号4は無線機1固有のIDを含んだ信号であることが望ましく、例えば、UWBインパルス無線信号4のインパルス列の正負のパターンでIDを通知する手法を採用できる。
【0021】
処理装置6は、無線機1、端末装置2、及びデータベース装置7にネットワーク5を通じて接続されている。処理装置6は、前記ネットワーク5を通じて端末装置2が自身の位置測定を実施したタイミング、この位置測定によって得られた端末装置2の座標、第1の(送信側)無線機1がUWBインパルス無線信号4を送信したタイミング、少なくとも1台以上の第2の(受信側)無線機1が、前記第1の(送信側)無線機1によって送信されたUWBインパルス無線信号4を受信したタイミング、及び、空間8内を伝播したUWBインパルス無線信号4の受信波形を入手する。そして、処理装置6は、端末装置2から伝送される位置情報と第1の無線機1から伝送される受信波形のパターンとを対応付ける処理を行う。また、処理装置6は、位置情報と受信波形のパターンとを対応付けた情報をデータベース装置7へ記憶する。
【0022】
また、処理装置6は、第1の(送信側)無線機1が、端末装置等(センサ、無線タグ、通信端末装置等)が取り付けられていない第2の移動物体が存在する空間8にUWBインパルス無線信号4を送信し、第1の無線機1以外の少なくとも1台以上の第2の(受信側)無線機1が、第2の移動物体によって反射した信号の受信波形を取得した場合は、その受信波形を解析し、解析された前記受信波形のパターンとデータベース装置7に蓄積されている受信波形のパターンとを比較し、それぞれのパターンが一致する結果を得た場合、そのパターンに対応付けられた端末装置2の位置を第2の移動物体の位置として出力する。
【0023】
これによって、端末装置等が取り付けられていない第2の移動物体が空間8内を移動する場合でも、データベース装置7に記憶された第1の移動物体3を基準とした受信波形のパターンを参照することによって、その位置を検出することができる。
【0024】
データベース装置7は、端末装置2の位置測定結果と受信波形のパターンとの対応データを保持する機能を備え、ネットワーク5を通じて無線機1、端末装置2及び処理装置6に接続される。
【0025】
データベース装置7によって保持されるデータは、端末装置2の位置測定結果と受信波形のパターンとの対応を記録しており、データベースは、一般的なリレーショナルデータベース管理システム、例えば、PostgreSQL、MySQL等によって構築される。また、データベース装置7は、端末装置2の位置測定結果と受信波形のパターンとの対応を確率的に保存するモデルをデータとして用いてもよく、UWBインパルス無線信号4の受信波形のパターンを入力値、端末装置2の位置測定結果を出力値とする自己学習ニューラルネットワークをデータとして用いてもよい。ニューラルネットワークの学習過程における教師信号は端末装置2の位置測定結果を用いることが好適である。
【0026】
なお、ネットワーク5は、有線回線又は無線回線若しくは有線回線と無線回線の両方によって構築することができ、無線機1、端末装置2及び処理装置6が接続される。有線回線を用いる場合はイーサネット(登録商標)、無線回線を用いる場合はIEEE802.11b規格に代表されるいわゆる無線LAN等を使用するとよい。
【0027】
また、UWBインパルス無線信号4を送受信できる機能を備えた端末装置2、処理装置6及びデータベース装置7によって、前記ネットワーク5を構築してもよい。
【0028】
次に、無線機1の構成について説明する。
【0029】
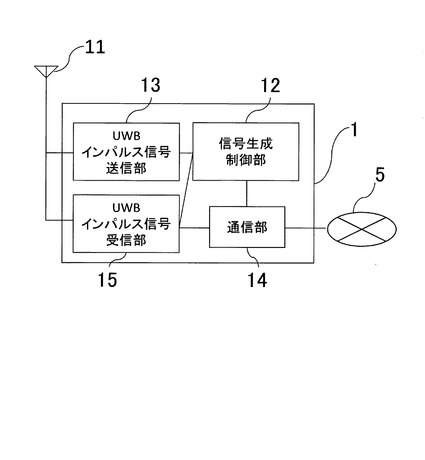
図2は、本発明の第1の実施の形態の無線機1の構成を示すブロック図である。
【0030】
無線機1は、アンテナ11、信号生成制御部12、UWBインパルス無線信号送信部13、通信部14及びUWBインパルス無線信号受信部15を備える。
【0031】
アンテナ11は、UWBインパルス無線信号4を送受信するアンテナであり、UWBインパルス無線信号送信部13及びUWBインパルス無線信号受信部15に接続される。また、アンテナ11は、アレーアンテナとしてもよく、また、複数の受信信号を一つの無線機1のUWBインパルス無線信号受信部15で受信することができるように構成してもよい。
【0032】
信号生成制御部12は、UWBインパルス無線信号4を送信するタイミングを決定する制御部であり、UWBインパルス無線信号送信部13、UWBインパルス無線信号受信部15及び通信部14に接続されている。ネットワーク5を通じて伝送された、端末装置2が自己の位置を測定したタイミング、又は処理装置6の指令に基づき、UWBインパルス無線信号送信部13がアクティベートされる時刻を決定する。なお、アクティベートされる時刻は、無線機1に内蔵されたタイマの信号に基づいて決定されてもよい。
【0033】
また、信号生成制御部12は、無線機1に固有のID及び無線機1に関する情報をビット列に変換し、変換されたビット列をUWBインパルス無線信号4に含ませて送信する指示をUWBインパルス無線信号送信部13に与える機能を備えてもよい。
【0034】
UWBインパルス無線信号送信部13は、UWBインパルス無線信号4を生成し、送信する処理部であり、アンテナ11及び信号生成制御部12に接続される。また、UWBインパルス無線信号送信部13は信号生成制御部12からの指令を受け、アンテナ11からUWBインパルス無線信号4を送信する。なお、UWBインパルス無線信号送信部13は、M系列等の拡散符号を重畳し通信誤りを低減する機能を備えてもよい。
【0035】
通信部14は、無線機1内の各機能モジュールとネットワーク5とを接続するインターフェースであり、UWBインパルス無線信号受信部15で受信したUWBインパルス無線信号4の受信波形をネットワーク5に接続された処理装置6に伝送する。
【0036】
UWBインパルス無線信号受信部15は、第1の無線機1から送信されたUWBインパルス無線信号4を受信する機能、及び受信したUWBインパルス無線信号4の受信波形を計測する機能を備え、計測された受信波形を通信部14及びネットワーク5を通じて処理装置6に伝送する。また、UWBインパルス無線信号受信部15は、UWBインパルス無線信号送信部13が、M系列等の拡散符号の重畳によって符号拡散している場合は、同様の拡散符号を重畳し逆拡散することによって受信信号を復調する。
【0037】
また、無線機1は信号処理の機能を備え、UWBインパルス無線信号4の受信波形を解析した結果のみを処理装置6に伝送する構成でもよい。この場合は、無線機1に受信波形を解析するための汎用のプロセッサ又は専用のLSIを組み込む。
【0038】
なお、受信波形の解析については後述する。
【0039】
次に、処理装置6の構成について説明する。
【0040】
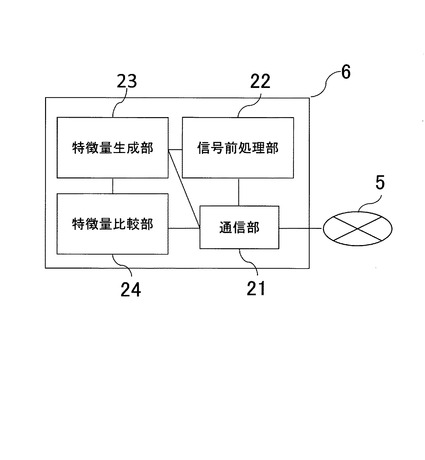
図3は、本発明の第1の実施の形態の処理装置6の構成を示すブロック図である。
【0041】
処理装置6は、通信部21、信号前処理部22、特徴量生成部23及び特徴量比較部24を備え、ネットワーク5によって、無線機1、端末装置2及びデータベース装置7に接続される。
【0042】
通信部21は、処理装置6内の各機能モジュール(信号前処理部22、特徴量生成部23及び特徴量比較部24)とネットワーク5とを接続する通信インターフェースである。通信部21は、少なくとも1台以上の第2の無線機1によって受信されたUWBインパルス無線信号4の受信波形をネットワーク5を通じて受信し、受信した受信波形を信号前処理部22に出力する。また、通信部21は、端末装置2から伝送される端末装置2の位置情報をネットワーク5を通じて受け取り、受信した位置情報を信号前処理部22に出力する。
【0043】
信号前処理部22は、入力された受信波形の信号前処理を行い、信号解析に適した波形に整形された受信波形を特徴量生成部23に出力する。
【0044】
信号前処理部22における信号前処理には、時間領域における移動平均を計算する処理、低域通過フィルタ(例えば、チェビシェフ低域通過フィルタ)による処理、複数の受信波形のアンサンブル平均を計算する処理等がある。これらの処理は、何れもノイズを軽減するためのものである。また、信号のアップサンプリング及び補間を行い、受信波形を信号解析に適した波形に整形することもできる。なお、一般的に信号前処理の計算量は膨大なものとなるため、信号前処理は汎用プロセッサで行ってもよいが、専用に設けられたLSI上で行うように構成するのが好適である。
【0045】
本実施の形態においては、信号の前処理にアンサンブル平均の計算を用いるのが好適である。ここで、アンサンブル平均とは複数の信号波形の平均を計算する方法である。
【0046】
図4は、本発明の第1の実施の形態の受信波形のアンサンブル平均計算の概念図である。
【0047】
信号前処理部22は、端末装置2の位置測定結果が同一の値となる場合又は所定の範囲内に収まる場合、すなわち、端末装置2が取り付けられた第1の移動物体3が同一の位置にあると判定される場合の受信波形を対象として、それら受信波形のアンサンブル平均を計算し、計算されたアンサンブル平均を特徴量生成部23に入力する。アンサンブル平均の計算によってノイズ成分が除去され、信号解析に適した波形のみを抽出することができるため、信号前処理部22においてアンサンブル平均の処理を行うことは好適である。
【0048】
本実施の形態のように、ネットワーク5によって無線機1及び処理装置6が接続された構成の場合、第1の無線機1がUWBインパルス無線信号4を送信した時刻と一つの第2の無線機1が前記UWBインパルス無線信号4を受信した時刻とがネットワーク5を通じて処理装置6の通信部21に入力される。
【0049】
信号前処理部22は、信号送信時刻と信号受信時刻によって示される信号の同期点を計算し、1台の第2の無線機1が異なるタイミングで受信した受信波形31、受信波形32及び受信波形33を、各々の信号について算出された同期点を基準として重ね合わせ、信号強度の平均、すなわち、アンサンブル平均34を計算する。
【0050】
また、処理装置6は、第1の無線機1によるUWBインパルス無線信号4の送信時刻又は第2の無線機1によるUWBインパルス無線信号4の受信時刻が通知されない場合でも、受信波形の相関が最大となる点を計算することによって、同期点を検出することができ、これによって、推定された同期点における前記受信波形31、受信波形32及び受信波形33のアンサンブル平均34を求めることができる。
【0051】
図3に示す処理装置6の構成の説明に戻る。
【0052】
特徴量生成部23は、信号前処理部22において前処理をした受信波形を解析し、複数の特徴量を抽出する。特徴量生成部23は、通信部21、信号前処理部22及び特徴量比較部24に接続される。
【0053】
特徴量生成部23は第1の移動物体3による受信波形から抽出された第1の特徴量(例えば、特徴ベクトル)と端末装置2から伝送された位置情報とを対応付け、対応付けられた情報を通信部21に出力し、処理装置6の通信部21はこれらの情報をデータベース装置7へ伝送する。データベース装置7は、受信波形から抽出された特徴量と端末装置2の位置情報とを対応付けた情報を対応データに記録する。
【0054】
また、特徴量生成部23は、端末装置等が取り付けられていない第2の移動物体による受信波形を解析し、第2の特徴量を抽出する。
【0055】
なお、特徴量とは、一般に信号の特徴を表す物理量であり、様々な種類が存在する。例えば、信号の統計値(信号の平均値、分散、中央値、最大値、最小値、最頻値等)、信号のスペクトル等周波数成分に関する特徴量、キャリブレーション値(空間内に移動物体が存在しない場合の受信波形と、空間内にあらかじめ定められた人数の人間がいる場合の受信波形と、移動物体が等速であらかじめ定められた軌跡を移動している場合の受信波形等との差分値相関値(又はある時刻の信号受信波形と一定時間前の受信波形との差分値、過去数回分の受信波形の平均値等)、無線信号による受信波形とカメラ画像マイクロフォン等のセンサによる出力値との差分値相関値等がある。
【0056】
また、抽出されたすべての特徴量を使用する必要はなく、必要に応じて、いくつかを組み合わせてベクトルとして用いてもよい。例えば、受信信号の平均値と分散値を組にして特徴ベクトルとして用いることが考えられる。
【0057】
本実施の形態においては、特に、特徴量生成部23は特徴量として受信信号の遅延プロファイルを計算するのが好適である。
【0058】
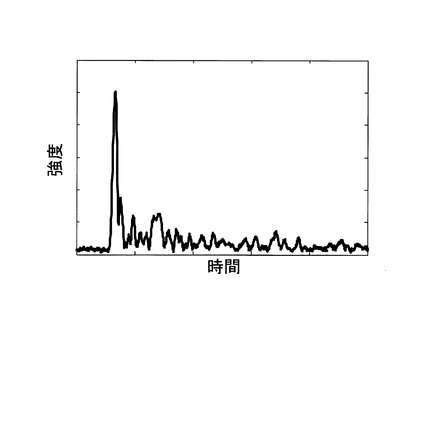
図5は、本発明の第1の実施の形態の受信波形の遅延プロファイル特性の一例を示す図である。
【0059】
遅延プロファイルは無線信号に特有の特徴量であり、マルチパスを経由して受信機に到達した信号に関し、遅延波到達までの遅れ時間とその強度分布を示す。この遅延プロファイルは伝播路の状態によって変化するため、空間8の物理的な状態を表しているといえる。図5に示す波形の最も高いピークは移動物体から反射して受信機に到達した直接波であり、直接波の次に現れたいくつかのピークは空間8を伝播した反射波である。その他の小さな波はノイズ成分を表している。
【0060】
なお、特徴量生成部23における特徴量の抽出は、UWBインパルス無線信号4を受信する第2の無線機1側において行われてもよい。この場合は、無線機1に汎用のプロセッサ又は特徴量計算を行う専用のLSIを組み込むとよい。
【0061】
再び、図3に示す処理装置6の構成の説明に戻る。
【0062】
特徴量比較部24は、受信波形から抽出された特徴量を比較する。特徴量比較部24は、通信部21及び特徴量生成部23に接続される。
【0063】
特徴量比較部24は、データベース装置7に記録されている第1の移動物体3による受信波形の第1の特徴量と、端末装置等が取り付けられていない第2の移動物体による受信波形の第2の特徴量とを比較して、これらが一致する結果を得た場合、その特徴量に対応付けられている端末装置2の位置を、第2の移動物体の位置として出力する。
【0064】
なお、特徴量比較部24は、受信波形の特徴量を比較する場合、複数の特徴量の近接性又は類似性の大小関係を判定する。具体的な基準としては、比較する特徴量の間のユークリッド距離、マハラノビス距離、相関係数、差分値等がある。これらは使用される環境に適応するように変更することができる。
【0065】
さらに、前記特徴量比較部24は、少なくとも1台以上の第2の無線機1によって受信された受信波形の第2の特徴量の変化によって、端末装置等が取り付けられていない第2の移動物体の移動を検出し、これを出力する機能をもつ。ここで、前記第2の移動物体の移動の検出は、特徴量の比較に基づく。例えば、特徴量比較部24は、第2の無線機1によって受信された受信波形の第2の特徴量と、この第2の特徴量の受信前に受信した受信波形の第2の特徴量との間のユークリッド距離を計算し、計算されたユークリッド距離が所定の閾値を超えた場合は第2の移動物体が移動したと判断する。
【0066】
次に、本発明の実施の形態において、移動物体にセンサ、無線タグ、通信端末装置等を取り付けず、移動物体に負担を与えずに移動物体の位置及び移動を検出する方法を、図6から図9を用いて説明する。
【0067】
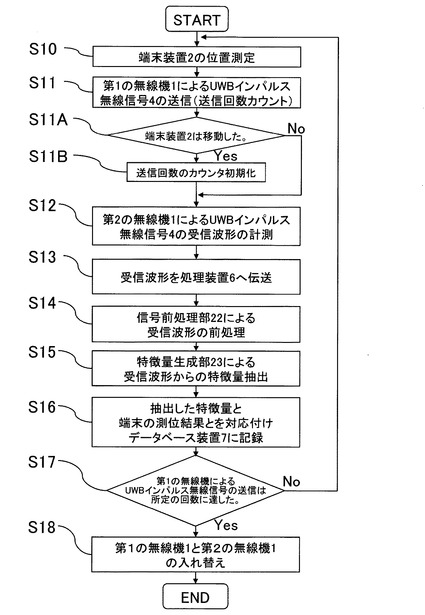
図6は、本発明の第1の実施の形態において、端末装置2の位置測定結果と第1の移動物体3による受信波形の第1の特徴量とを対応付けて記録する処理を示すフローチャートである。
【0068】
端末装置2が取り付けられた第1の移動物体3が空間8内を移動する場合、空間8の電波伝播環境は前記第1の移動物体3自身によって変化する。したがって、第1の移動物体3による受信波形は、第1の移動物体3の位置に依存して変化する。
【0069】
初めに、第1の移動物体3に取り付けられた端末装置2は、自身の位置を測定し、得られた位置情報及び測定したタイミングを処理装置6に伝送する(ステップS10)。端末11の位置は、すなわち、受信波形に変化をもたらす第1の移動物体3の位置である。なお、端末装置2の位置測定方法については、図8を用いて後述する。
【0070】
次に、第1の無線機1は、ステップS10において端末装置2の位置測定が行われたことをネットワーク5を通じて認識した後、第1の移動物体3が存在する空間8に向けて、UWBインパルス無線信号4を送信し、送信回数をカウントする(ステップS11)。
【0071】
次に、処理装置6は第1の移動物体3に取り付けられた端末装置2が移動したか否かをと判断する(ステップS11A)。ステップS11Aにおいて、端末装置2が移動していないと判断された場合は、ステップS12に進み、端末装置2が移動したと判断された場合は、無線機1におけるUWBインパルス無線信号4の送信回数のカウンタを初期化してカウンタを0に戻す(ステップS11B)。これらの処理によって、処理装置6は、受信波形に変化をもたらす第1の移動物体3が同一の座標に位置している間に、複数回の送信タイミング分の受信波形を取得することができ、取得された受信波形を重ね合わせることによって、より正確なアンサンブル平均を計算することができる。
【0072】
なお、端末装置2の移動は、ステップS10において端末装置2から処理装置6へ通知された端末装置2の位置測定結果が前回のタイミングで測定された結果と同一でない又は所定の範囲内にないと判定されることによって検出される。
【0073】
次に、第1の無線機1以外の少なくとも1台以上の第2の無線機1は、空間8の伝播した前記UWBインパルス無線信号4を、アンテナ11を通じてUWB無線信号受信部15で受信し、受信波形を計測する(ステップS12)。
【0074】
このとき、UWBインパルス無線信号4を送信した第1の無線機1と、UWBインパルス無線信号4を受信する第2の無線機1とは、ネットワーク5によって相互に接続されているので、第1の無線機1は、UWBインパルス無線信号4を送信したことを通知するトリガを信号生成制御部12において作成し、通信部14に出力し、ネットワーク5を通じて第2の無線機1に通知してもよい。
【0075】
第2の無線機1は、計測された受信波形を、ネットワーク5を通じて処理装置6へ伝送する(ステップS13)。
【0076】
次に、処理装置6の信号前処理部22は、第1の無線機1がUWBインパルス無線信号4を送信したタイミング及び第2の無線機1がUWBインパルス無線信号4を受信したタイミングを用いて、受信波形の前処理として、ノイズ除去のための信号前処理を行う(ステップS14)。
【0077】
この信号前処理には、既に述べたとおり、移動平均を計算する処理、低域通過フィルタリングによる処理、複数の受信波形のアンサンブル平均の計算の処理等がある。信号前処理部22は、信号解析に適した波形に整形した受信波形を特徴量生成部23に入力する。また、この前処理は、第2の無線機1が無線信号14を受信した時点で、第2の無線機1内で行ってもよい。この場合は、無線機1に汎用のプロセッサを組み込み、このプロセッサによって計算してもよいが、無線機1に前処理機能に特化した回路構成を含む専用のLSIを組み込み、これを使用することが好適である。
【0078】
次に、特徴量生成部23は、信号前処理部22から入力された受信波形を解析し、受信波形から第1の特徴量を抽出する(ステップS15)。
【0079】
特徴量の要素は既出のとおりであり、遅延プロファイルのほか、例えば、信号の平均値、分散、中央値、最大値、最小値、最頻値等の統計量、信号のスペクトル等周波数成分に関する特徴量、キャリブレーション値、すなわち、空間内に移動物体がない場合の受信波形と、空間内に人間があらかじめ定められた人数がいる場合の受信波形と、移動物体が等速であらかじめ定められた軌跡を移動している場合の受信波形等との差分値及び相関値、一定時間前の受信波形との差分値、過去数回分の受信波形の平均値、カメラ画像やマイクロフォン等の無線信号以外のセンサの出力値と受信波形との差分値及び相関値がある。
【0080】
なお、特徴量の抽出は、無線機1に汎用のプロセッサを組み込み、この汎用のプロセッサで計算してもよいが、信号処理の計算量が膨大になる場合は、無線機1に特徴ベクトル抽出に適する回路構成を含む専用のLSIを組み込み、これを使用することが好適である。
【0081】
次に、特徴量生成部23は、抽出された第1の特徴量と、ステップS10において通知されている端末装置2の位置情報とを対応付け、対応付けられた情報をデータベース装置7に記録する(ステップS16)。
【0082】
また、データベース装置7へ、対応付けられた情報をエントリとして記録する場合において、そのエントリと同一の端末装置2の位置が記載されたエントリが既に存在するときは、既に存在するエントリをその新しいエントリと置き換えてもよいし、既に存在するエントリとその新しいエントリとの平均をとって最新のエントリとしてよい。また、その新しいエントリを、既に存在するエントリとは異なるエントリとして保存してもよい。
【0083】
以上の手順を繰り返すことによって、データベース装置7の対応データのエントリが次々に蓄積され、空間8の観測領域を網羅していく。また、逐次情報を更新するため、伝播環境が変化した場合でもその変化に追従することができる。
【0084】
また、キャリブレーションとして、観測領域に一切の移動物体が存在しない場合の特徴量(特徴ベクトル)、移動物体が等速である定められた方向に移動している場合の特徴量(特徴ベクトル)等を取得してもよい。等速度運動する移動物体の特徴量を取得することによって、移動物体の移動方向の変化を検出することができる。
【0085】
次に、処理装置6(又は無線機1)は、UWBインパルス無線信号4が所定のパルス回数分送信された否かを判定する(ステップS17)。
【0086】
UWBインパルス無線信号4が所定の回数分送信されていないと判定された場合は、所定の回数に達するまで、ステップS10からステップS16までの処理が繰り返される。これによって、第1の移動物体3による受信波形のパターンを多く集めることができ、より正確なアンサンブル平均を計算することができる。
【0087】
一方、UWBインパルス無線信号4が所定の回数分送信されたと判定された場合は、処置装置16(又は無線機1)は、第1の無線機1と第2の無線機1とを交互に入れ替えるよう指令する(ステップS18)。第1の無線機1とは別の位置に設置されている他の無線機1からUWBインパルス無線信号4を送信することによって、無線機1の配置を変更することなく、より多くの定点から受信波形のパターンを得ることができる。
【0088】
以上、図6に示すステップS10からステップS18までの処理によって、端末装置2の位置情報、すなわち、第1の移動物体3の位置情報と第1の移動物体3による受信波形の第1の特徴量とが対応付けられ、対応付けられた情報がデータベース装置7の対応データに記録された。
【0089】
次に、端末装置等が取り付けられていない第2の移動物体の位置を測定する処理を説明する。第2の移動物体が空間8を移動する場合、空間8の電波伝播環境は前記第2の移動物体自身によって変化する。したがって、無線機1によって得られる受信波形は第2の移動物体の位置に依存したパターンとなる。
【0090】
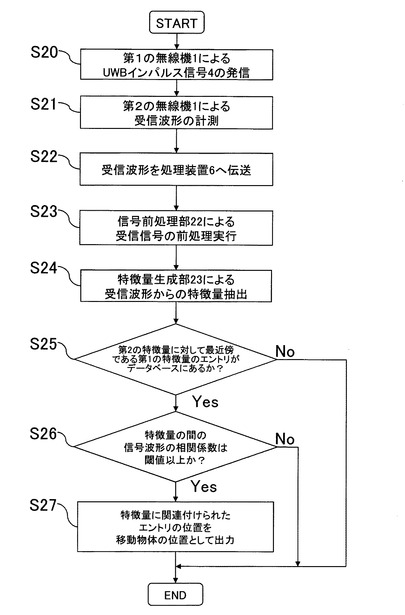
図7は、本発明の第1の実施の形態において、第2の移動物体による受信波形から抽出された第2の特徴量とデータベース装置7に記録された第1の特徴量とを比較し、第2の移動物体の位置を出力する処理を示すフローチャートである。
【0091】
初めに、第1の無線機1は、端末装置等が取り付けられていない第2の移動物体が存在する空間8に向けて、UWBインパルス無線信号4を送信する(ステップS20)。第1の無線機1以外の少なくとも1台以上の第2の無線機1は、空間8内を伝播したUWBインパルス無線信号4をアンテナ11を通じてUWBインパルス無線信号受信部15で受信し、第2の移動物体による受信波形を計測する(ステップS21)。次に、前記第2の無線機1は、計測された受信波形をネットワーク5を通じて処理装置6に伝送する(ステップS22)。
【0092】
次に、処理装置6の信号前処理部22は、入力された受信波形の前処理を行い、信号解析に適した波形に整形された受信波形を特徴量生成部23に入力する(ステップS23)。
【0093】
なお、この前処理は前述のステップS14と同様のノイズ除去処理である。例えば、移動平均を計算する処理、低域通過フィルタによる処理、及び複数の受信波形のアンサンブル平均を計算する処理等があるが、本実施の形態においては、処理装置6の信号前処理部22はアンサンブル平均の計算をするのが好適である。また、この信号前処理は、第2の無線機1が、UWBインパルス無線信号4を受信したときに、第2の無線機1内において行われてもよい。この場合、無線機1に汎用のプロセッサを組み込み、この汎用のプロセッサで計算してもよいが、無線機1に前処理機能に適する回路構成を含む専用のLSIを組み込み、これを使用することが好適である。
【0094】
次に、処理装置6の特徴量生成部23は、入力された受信波形を解析し、第2の特徴量を抽出する(ステップS24)。特徴量生成部23は第2の移動物体による受信波形から抽出した第2の特徴量を特徴量比較部24に出力する。
【0095】
ここで、抽出される特徴ベクトルの要素は既に説明したとおりであり、遅延プロファイルのほか、例えば、信号の平均値、分散、中央値、最大値、最小値、最頻値等の統計量、信号のスペクトル等、周波数成分に関する特徴量、キャリブレーション値、すなわち、空間内に移動物体が存在しない場合の受信波形と、空間内に人間があらかじめ定められた人数が存在する場合の受信波形と、移動物体が等速であらかじめ定められた軌跡を移動している場合の受信波形等との差分値及び相関値、一定時間前の受信波形との差分値、過去数回分の受信波形の平均値、カメラ画像及びマイクロフォン等の無線信号以外のセンサの出力値と受信波形との差分値及び相関値があるが、前述のステップS15で計算したものと同じ特徴量を用いる。この場合、無線機1に汎用のプロセッサを組み込み、この汎用のプロセッサで計算してもよいが、無線機1に特徴ベクトル抽出に適する回路構成を含む専用のLSIを組み込み、これを使用することが好適である。
【0096】
ステップS24によって、処理装置6の特徴量比較部24は、第2の移動物体による受信波形から抽出された第2の特徴量を得た。次に、特徴量比較部24は、データベース装置7に記録された対応データを参照し、第2の特徴量に対して特徴量間の距離が最近傍である第1の特徴量のエントリがあるか否かを判定する(ステップS25)。
【0097】
なお、特徴量の比較には最近傍決定則に従う手法を用いる。すなわち、データベース装置7に記録されている第1の特徴量の集合を特徴空間上にマッピングし、マッピングされた第1の特徴量と新たに得られた第2の特徴量とが前記特徴空間上で最近傍となるクラスを照合結果として出力する手法である。具体的には、すべての第1の特徴量と新たに得られた第2の特徴量と間のユークリッド距離を計算し、ユークリッド距離が最も小さくなる第1の特徴量のエントリを第2の特徴量に対して最近傍である特徴量として出力する。また、ユークリッド距離を用いずにマハラノビス距離、相関係数、差分値等を用いてもよい。
【0098】
また、第2の特徴量と第2の特徴量に対して最近傍であるとして出力された第1の特徴量との信号波形間の相関係数を計算し、相関係数が閾値を超えた場合に限って端末の座標を出力するステップS26をステップS25の次に設けてもよい。
【0099】
ステップS25において、第2の特徴量に対して最近傍である第1の特徴量のエントリがあると判定され、必要に応じてステップS26を設定した場合は、次に、該第1の特徴量と該第2の特徴量との間の相関係数を計算し、計算された相関係数が所定の閾値を超える否かを判定する(ステップS26)。ステップS26において、相関係数が閾値を超えると判定された場合は、該第1の特徴量のエントリに記載された端末装置2の位置を第2の移動物体の位置として出力する(ステップS27)。
【0100】
なお、処理装置6は、出力した第2の移動物体の位置と時刻を空間8上にプロットすることによって、第2の移動物体の移動経路又は速度を計算するようにしてもよい。この計算結果は、データベース装置7に記録されるよう構成してもよい。これによって、例えば、第2の移動物体がある位置に一定期間止まっていたのか又はどの方向に移動したのかを知ることができる。
【0101】
また、ステップS25において第2の特徴量に対して最近傍である第1の特徴量のエントリがないと判定された場合、及び、必要に応じて設定したステップS26において最近傍となった第1の特徴量と第2の特徴量との間の相関係数が所定の閾値を超えないと判定された場合は、第2の特徴量に一致する第1の特徴量はないと判断し、特徴量比較の処理を終了する。
【0102】
なお、ステップS25において、第1の特徴量と第2の特徴量が十分な確度をもって一致すると判定できる場合は、ステップS26を省略し、該第1の特徴量のエントリに記載された端末装置2の位置情報を第2の移動物体の位置として出力してもよい。
【0103】
また、ニューラルネットワークのような学習を行うネットワークによってデータベース装置7を構成する場合は、第2の特徴量をネットワークへの入力値とし、端末装置2の位置を出力値とする。入出力値の照合を取るアルゴリズムは、使用されるセンサ又は環境に適応するよう変更できるよう構成するのが好適である。例えば、人間によってこれを変更するアルゴリズムと、端末装置2の位置測定結果とその時点における端末装置2を備えた移動物体の測定結果との間の差を最小にするアルゴリズムとを、処理装置6が適応するように選択してもよい。
【0104】
次に、図6のステップS10に示した端末装置の位置測定の方法を説明する。
【0105】
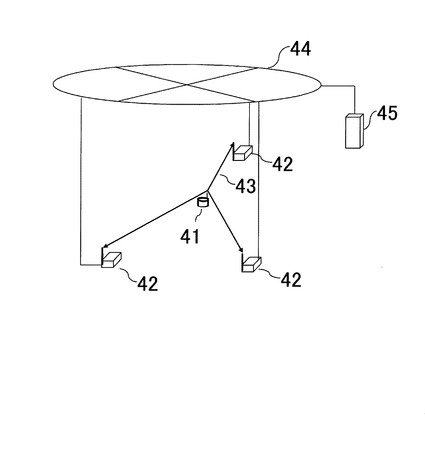
図8は、本発明の第1の実施の形態における端末装置41の位置測定システムの構成図である。
【0106】
端末装置41の位置を測定する方法には、カメラの動画像による認識の方法、超音波による認識の方法、RFID又はICチップによる方法、UWBインパルス無線以外の無線による方法等がある。本発明の第1の実施の形態においては、端末装置41が送信する無線信号の伝播時間を計測することによって端末装置41の位置を決定する測定方法を用いる。
【0107】
無線信号の伝播時間を用いた測定方法には、大きく分けてTOA(Time of Arrival)とTDOA(Time Difference of Arrival)がある。前者は端末装置から複数の基地局装置までの信号の伝播時間から、端末装置の位置を測定する方法であり、後者は端末装置からの測位信号を基地局が受信する時刻と、位置が既知である基準基地局装置から発信された基準信号を基地局装置が受信した時刻との差から、端末装置の位置を測定する方法である。インパルス型のUWB無線信号は連続波の信号に比べて伝播時間を容易に計測することができる。よって、インパルス型のUWB無線信号を用いる測位システムは、TOA又はTDOAのいずれの方式も端末装置の位置測定に好適である。
【0108】
図8に示す端末位置測定システムは、少なくとも3台以上の基地局装置42及び端末位置解析装置45を備え、ネットワーク44によって接続される。端末装置41は測位信号43を送信する機能を備える。基地局装置42は、測位信号43を受信する機能を備え、ネットワーク44を通じて端末位置解析装置45に接続される。基地局装置42は、受信した測位信号43を位置解析装置86に伝送する。端末位置解析装置45は、ネットワーク44を通じて少なくとも3台以上の基地局装置42が計測した測位信号43の伝播時間のそれぞれを取得し、取得された伝播時間によって端末装置41の位置を計算する。
【0109】
上述したとおり、本発明の第1の実施の形態によれば、遅延プロファイルを含む受信波形の第1の特徴量と端末装置41が取り付けられた第1の移動物体3の位置とをあらかじめ対応付けて逐次記録することによって、障害物によって無線機と移動物体との見通し環境が得にくい屋内空間においても、センサ、無線タグ、通信端末装置等を取り付けることが困難な第2の移動物体に、これを取り付けることなく、その位置を測定し、また、移動を検出することができる。
【0110】
<実施形態2>
本発明の第2の実施の形態の測位システムの構成について説明する。
【0111】
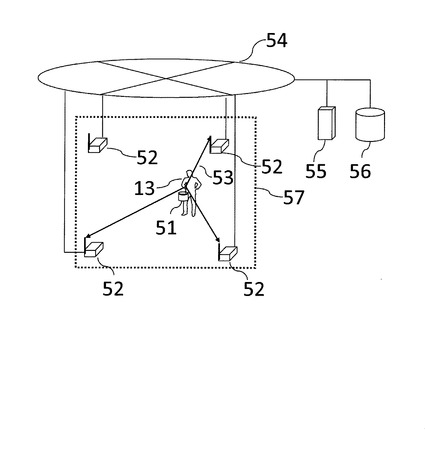
図9は、本発明の第2の実施の形態の測位システムの構成図である。
【0112】
図8に示した端末装置の位置測定システムにおける基地局装置42及び端末位置解析装置45は、図1に示す測位システムにおける無線機1及び処理装置6とそれぞれ同一であってもよい。つまり、測位システムの無線機1は端末装置41の位置測定のための基地局装置42の機能を兼ね、処理装置6は端末位置解析装置45の機能を兼ねることができる。
【0113】
第2の実施の形態の測位システムは、端末装置51、基地局装置兼無線機52、端末位置解析装置兼処理装置55及びデータベース装置56を備え、各装置はネットワーク54によって接続される。端末装置51は、測位信号53を送信する機能を備える。基地局装置兼無線機52は、測位信号53を受信する機能を備え、ネットワーク54を通じて端末位置解析装置兼処理装置55に接続され、受信した測位信号53を端末位置解析装置兼処理装置55に伝送する。端末位置解析装置兼処理装置55は、ネットワーク54を通じて基地局装置兼無線機52が受信した少なくとも3台以上の測位信号53の伝播時間を取得し、その伝播時間によって端末装置51の位置を計算する。
【0114】
第2の実施の形態の測位システムにおける処理は、図6に示すステップS10からステップS18までの処理及び図7に示すステップS20からステップS27までの処理と同一であり、図6のステップS10に示す端末位置測定の処理は、基地局装置兼無線機52及び端末位置解析装置兼処理装置55が行う。
【0115】
以上、説明したとおり、本発明の第2の実施の形態は、第1の実施の形態と比較すると、端末装置の位置測定を、受信波形を計測する無線機及び処理装置が行う点で異なる。これによって、第2の実施の形態では、システム構成を簡略化することができる。
【図面の簡単な説明】
【0116】
【図1】本発明の第1の実施の形態の測位システムの構成図である。
【図2】本発明の第1の実施の形態の無線機の構成を示すブロック図である。
【図3】本発明の第1の実施の形態の処理装置の構成を示すブロック図である。
【図4】本発明の第1の実施の形態の受信波形のアンサンブル平均計算の概念図である。
【図5】本発明の第1の実施の形態の受信波形の遅延プロファイル特性を示す図である。
【図6】本発明の第1の実施の形態の端末装置測位結果と受信波形の特徴量とを対応付けて記録する処理を示すフローチャートである。
【図7】本発明の第1の実施の形態の移動物体の位置を出力する処理を示すフローチャートである。
【図8】本発明の第1の実施の形態の端末装置測位システムの構成図である。
【図9】本発明の第2の実施の形態の測位システムの構成図である。
【符号の説明】
【0117】
1 無線機
2 端末装置
3 移動物体
4 UWBインパルス無線信号
5 ネットワーク
6 処理装置
7 データベース装置
8 空間
11 アンテナ
12 信号生成制御部
13 UWBインパルス無線信号送信部
14 通信部
15 UWBインパルス無線信号受信部
21 通信部
22 信号前処理部
23 特徴量生成部
24 特徴量比較部
31 受信波形
32 受信波形
33 受信波形
34 受信波形のアンサンブル平均
42 基地局装置
43 測位信号
44 ネットワーク
45 端末位置解析装置
52 基地局装置兼無線機
53 測位信号
54 ネットワーク
55 端末位置解析装置兼処理装置
56 データベース装置
57 空間
58 移動物体
【技術分野】
【0001】
本発明は、測位システムに関し、特に、電波の見通し環境が得られないような空間においてセンサ、通信端末装置等が取り付けられていない移動物体(例えば、人間及び自律走行機器等)の位置を無線信号の受信波形の変化によって測定するシステム及び装置に関する。
【背景技術】
【0002】
物品のトレース、セキュリティ等においては、移動物体の存在を検出する方法及び位置を測定する方法が必要である。その方法として、これまでに、大きく分けて二つの方法が知られている。
【0003】
第1の方法は、センサ、無線タグ、通信端末装置等を取り付けることが困難な移動物体の位置を測定するために、送受信機が電波、超音波等を移動物体に指向させて送信し、その反射波を受信するまでの往復時間を計測することによって、移動物体と送受信機との距離を測定する方法である(例えば、特許文献1参照。)。
【0004】
第2の方法は、見通し環境が得られない空間であって、電波、超音波等を移動物体に指向させることができない場合の移動物体の検出方法として、無線信号を送信機より送信し、受信機で受信した無線信号の遅延プロファイルの変化から、移動物体を検出する方法である(例えば、特許文献2及び特許文献3参照。)。遅延プロファイルは、送信機から受信機に直接到達した信号だけでなく、障害物等を反射して遅れて受信機に到達した信号も含めた受信信号強度の時間的プロファイルを示す分布であり、見通し環境外であっても移動物体が存在すれば、この強度分布が変化する。よって、遅延プロファイルの変化を検出することによって、見通し環境が得られない空間に存在する移動物体を検出することができる。
【特許文献1】特開平10−39015号公報
【特許文献2】特開平5−166074号公報
【特許文献3】特開2003−185735号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
屋内のように障害物によって無線機と移動物体との見通し環境が得にくい場合、第1の方法では、無線機と移動物体間との間の電波の伝播時間を正確に測ることができないため、移動物体の位置を測定することは困難である。
【0006】
また、第2の方法では、遅延プロファイルの変化を比較することによって移動物体の存在は検出できるものの、その移動物体の位置を測定することは不可能である。
【0007】
本発明は、屋内のように障害物によって無線機と移動物体との見通しが得にくい環境において、センサ、無線タグ、通信端末装置等を取り付けることが困難な移動物体に、これを取り付けることなく、その移動物体の位置を測定する測位システムを提供する。
【課題を解決するための手段】
【0008】
本発明の代表的な一例を示せば以下のとおりである。すなわち、第1の発明は、受信した信号の波形の解析結果を用いて、移動物体の位置を測定する測位システムであって、第1の移動物体に取り付けられた端末装置の位置を測定する端末位置測定装置と、少なくとも送信機を備える第1の無線装置と、少なくとも受信機を備える第2の無線装置と、前記第1の無線装置が送信した直接波、及び、第1の移動物体によって反射した反射波による信号の波形を解析して、第1の解析結果を生成する処理装置と、前記処理装置によって生成された第1の解析結果と前記第1の移動物体の位置とを記録するデータベースと、を備え、前記処理装置は、前記端末位置測定装置によって測定された前記端末装置の位置と前記第1の解析結果とを対応させて前記データベースに記録し、前記第1の無線装置が送信した直接波、及び、第2の移動物体によって反射した反射波による信号の波形を取得した場合、該取得した波形から生成された第2の解析結果と、前記データベースに記録された第1の解析結果とを比較し、前記第2の解析結果が前記第1の解析結果に該当すると判定された場合に、当該該当する第1の解析結果に対応する端末装置の位置を、前記第2の移動物体の位置と決定することを特徴とする。
【発明の効果】
【0009】
本発明の一実施形態によれば、センサ、無線タグ、通信端末装置等を取り付けることが困難な移動物体にそれらを取り付けることなく、その移動物体の位置を測定することができる。
【発明を実施するための最良の形態】
【0010】
<実施形態1>
本発明の第1の実施の形態について、図1から図8を用いて説明する。
【0011】
図1は、本発明の第1の実施の形態の測位システムの構成図である。
【0012】
測位システムは、端末装置2、複数の無線機1、処理装置6及びデータベース装置7を備え、各装置は無線回線又は有線回線によるネットワーク5によって接続される。
【0013】
無線機1は、無線信号を送信する機能及び空間8を伝播した無線信号を受信する機能を備え、ネットワーク5によって接続された処理装置6へ前記無線信号の受信波形を伝送する機能を備える。なお、空間8に送信する無線信号はUWBインパルス無線信号4を使用する。ここで、UWB(Ultra Wide Band)では、非常に広い周波数帯域を使った無線伝送方式の一つで、数ナノ秒以下のパルス信号が使用される。
【0014】
また、無線機1は、見通し環境が得られないような空間8、例えば、屋内空間に複数台設置され、複数の定点において空間8の電波伝播環境によって変化する受信波形のパターンを計測する。
【0015】
第1の無線機1は、空間8に向けてUWBインパルス無線信号4を送信し、第1の無線機1以外の少なくとも1台以上の第2の無線機1は、空間8を伝播したUWBインパルス無線信号4を受信する。このとき、UWBインパルス無線信号4を送信した第1の無線機1は、その送信を通知するトリガを信号生成制御部12において作成し、ネットワーク5を経由して第2の無線機1に通知してもよい。
【0016】
なお、あらかじめ定められた第1の無線機1のみが継続的にUWBインパルス無線信号4を送信するのではなく、所定の時間毎に送信機となる第1の無線機1と受信機となる第2の無線機1とが順次入れ替わることによって、無線機1の配置を変えることなく、より多くの定点から受信波形のパターンを得ることができる。
【0017】
この場合、UWBインパルス無線信号4の送信元がどの無線機1であるかを特定するために、それぞれの無線機1に割り当てられた固有のIDをUWBインパルス無線信号4に含ませて送信する必要がある。固有のIDを送信信号に付加する方法としては、UWBインパルス無線信号4のインパルス列の正負のパターンを利用する方法が考えられる。
【0018】
端末装置2は、第1の移動物体3(例えば、人間、動物、自律走行機器等)に取り付けられ、自己の位置を測定する機能及びネットワーク5によって接続された処理装置6へ自己の位置を伝送する機能を備える。
【0019】
端末装置2が取り付けられた第1の移動物体3が空間8内を移動する場合、端末装置2は自己の位置を逐次測定して、測定した位置を移動物体3の位置として処理装置6に伝送する。
【0020】
UWBインパルス無線信号4は、空間8内を伝播し、少なくとも1台以上の無線機1によって受信される。このUWBインパルス無線信号4は、あらかじめ定められた1台の無線機1から送信されてもよいし、複数の無線機1が順に送信と受信の役割を交替し、送信の役割となった無線機1から送信されてもよい。このとき、UWBインパルス無線信号4は無線機1固有のIDを含んだ信号であることが望ましく、例えば、UWBインパルス無線信号4のインパルス列の正負のパターンでIDを通知する手法を採用できる。
【0021】
処理装置6は、無線機1、端末装置2、及びデータベース装置7にネットワーク5を通じて接続されている。処理装置6は、前記ネットワーク5を通じて端末装置2が自身の位置測定を実施したタイミング、この位置測定によって得られた端末装置2の座標、第1の(送信側)無線機1がUWBインパルス無線信号4を送信したタイミング、少なくとも1台以上の第2の(受信側)無線機1が、前記第1の(送信側)無線機1によって送信されたUWBインパルス無線信号4を受信したタイミング、及び、空間8内を伝播したUWBインパルス無線信号4の受信波形を入手する。そして、処理装置6は、端末装置2から伝送される位置情報と第1の無線機1から伝送される受信波形のパターンとを対応付ける処理を行う。また、処理装置6は、位置情報と受信波形のパターンとを対応付けた情報をデータベース装置7へ記憶する。
【0022】
また、処理装置6は、第1の(送信側)無線機1が、端末装置等(センサ、無線タグ、通信端末装置等)が取り付けられていない第2の移動物体が存在する空間8にUWBインパルス無線信号4を送信し、第1の無線機1以外の少なくとも1台以上の第2の(受信側)無線機1が、第2の移動物体によって反射した信号の受信波形を取得した場合は、その受信波形を解析し、解析された前記受信波形のパターンとデータベース装置7に蓄積されている受信波形のパターンとを比較し、それぞれのパターンが一致する結果を得た場合、そのパターンに対応付けられた端末装置2の位置を第2の移動物体の位置として出力する。
【0023】
これによって、端末装置等が取り付けられていない第2の移動物体が空間8内を移動する場合でも、データベース装置7に記憶された第1の移動物体3を基準とした受信波形のパターンを参照することによって、その位置を検出することができる。
【0024】
データベース装置7は、端末装置2の位置測定結果と受信波形のパターンとの対応データを保持する機能を備え、ネットワーク5を通じて無線機1、端末装置2及び処理装置6に接続される。
【0025】
データベース装置7によって保持されるデータは、端末装置2の位置測定結果と受信波形のパターンとの対応を記録しており、データベースは、一般的なリレーショナルデータベース管理システム、例えば、PostgreSQL、MySQL等によって構築される。また、データベース装置7は、端末装置2の位置測定結果と受信波形のパターンとの対応を確率的に保存するモデルをデータとして用いてもよく、UWBインパルス無線信号4の受信波形のパターンを入力値、端末装置2の位置測定結果を出力値とする自己学習ニューラルネットワークをデータとして用いてもよい。ニューラルネットワークの学習過程における教師信号は端末装置2の位置測定結果を用いることが好適である。
【0026】
なお、ネットワーク5は、有線回線又は無線回線若しくは有線回線と無線回線の両方によって構築することができ、無線機1、端末装置2及び処理装置6が接続される。有線回線を用いる場合はイーサネット(登録商標)、無線回線を用いる場合はIEEE802.11b規格に代表されるいわゆる無線LAN等を使用するとよい。
【0027】
また、UWBインパルス無線信号4を送受信できる機能を備えた端末装置2、処理装置6及びデータベース装置7によって、前記ネットワーク5を構築してもよい。
【0028】
次に、無線機1の構成について説明する。
【0029】
図2は、本発明の第1の実施の形態の無線機1の構成を示すブロック図である。
【0030】
無線機1は、アンテナ11、信号生成制御部12、UWBインパルス無線信号送信部13、通信部14及びUWBインパルス無線信号受信部15を備える。
【0031】
アンテナ11は、UWBインパルス無線信号4を送受信するアンテナであり、UWBインパルス無線信号送信部13及びUWBインパルス無線信号受信部15に接続される。また、アンテナ11は、アレーアンテナとしてもよく、また、複数の受信信号を一つの無線機1のUWBインパルス無線信号受信部15で受信することができるように構成してもよい。
【0032】
信号生成制御部12は、UWBインパルス無線信号4を送信するタイミングを決定する制御部であり、UWBインパルス無線信号送信部13、UWBインパルス無線信号受信部15及び通信部14に接続されている。ネットワーク5を通じて伝送された、端末装置2が自己の位置を測定したタイミング、又は処理装置6の指令に基づき、UWBインパルス無線信号送信部13がアクティベートされる時刻を決定する。なお、アクティベートされる時刻は、無線機1に内蔵されたタイマの信号に基づいて決定されてもよい。
【0033】
また、信号生成制御部12は、無線機1に固有のID及び無線機1に関する情報をビット列に変換し、変換されたビット列をUWBインパルス無線信号4に含ませて送信する指示をUWBインパルス無線信号送信部13に与える機能を備えてもよい。
【0034】
UWBインパルス無線信号送信部13は、UWBインパルス無線信号4を生成し、送信する処理部であり、アンテナ11及び信号生成制御部12に接続される。また、UWBインパルス無線信号送信部13は信号生成制御部12からの指令を受け、アンテナ11からUWBインパルス無線信号4を送信する。なお、UWBインパルス無線信号送信部13は、M系列等の拡散符号を重畳し通信誤りを低減する機能を備えてもよい。
【0035】
通信部14は、無線機1内の各機能モジュールとネットワーク5とを接続するインターフェースであり、UWBインパルス無線信号受信部15で受信したUWBインパルス無線信号4の受信波形をネットワーク5に接続された処理装置6に伝送する。
【0036】
UWBインパルス無線信号受信部15は、第1の無線機1から送信されたUWBインパルス無線信号4を受信する機能、及び受信したUWBインパルス無線信号4の受信波形を計測する機能を備え、計測された受信波形を通信部14及びネットワーク5を通じて処理装置6に伝送する。また、UWBインパルス無線信号受信部15は、UWBインパルス無線信号送信部13が、M系列等の拡散符号の重畳によって符号拡散している場合は、同様の拡散符号を重畳し逆拡散することによって受信信号を復調する。
【0037】
また、無線機1は信号処理の機能を備え、UWBインパルス無線信号4の受信波形を解析した結果のみを処理装置6に伝送する構成でもよい。この場合は、無線機1に受信波形を解析するための汎用のプロセッサ又は専用のLSIを組み込む。
【0038】
なお、受信波形の解析については後述する。
【0039】
次に、処理装置6の構成について説明する。
【0040】
図3は、本発明の第1の実施の形態の処理装置6の構成を示すブロック図である。
【0041】
処理装置6は、通信部21、信号前処理部22、特徴量生成部23及び特徴量比較部24を備え、ネットワーク5によって、無線機1、端末装置2及びデータベース装置7に接続される。
【0042】
通信部21は、処理装置6内の各機能モジュール(信号前処理部22、特徴量生成部23及び特徴量比較部24)とネットワーク5とを接続する通信インターフェースである。通信部21は、少なくとも1台以上の第2の無線機1によって受信されたUWBインパルス無線信号4の受信波形をネットワーク5を通じて受信し、受信した受信波形を信号前処理部22に出力する。また、通信部21は、端末装置2から伝送される端末装置2の位置情報をネットワーク5を通じて受け取り、受信した位置情報を信号前処理部22に出力する。
【0043】
信号前処理部22は、入力された受信波形の信号前処理を行い、信号解析に適した波形に整形された受信波形を特徴量生成部23に出力する。
【0044】
信号前処理部22における信号前処理には、時間領域における移動平均を計算する処理、低域通過フィルタ(例えば、チェビシェフ低域通過フィルタ)による処理、複数の受信波形のアンサンブル平均を計算する処理等がある。これらの処理は、何れもノイズを軽減するためのものである。また、信号のアップサンプリング及び補間を行い、受信波形を信号解析に適した波形に整形することもできる。なお、一般的に信号前処理の計算量は膨大なものとなるため、信号前処理は汎用プロセッサで行ってもよいが、専用に設けられたLSI上で行うように構成するのが好適である。
【0045】
本実施の形態においては、信号の前処理にアンサンブル平均の計算を用いるのが好適である。ここで、アンサンブル平均とは複数の信号波形の平均を計算する方法である。
【0046】
図4は、本発明の第1の実施の形態の受信波形のアンサンブル平均計算の概念図である。
【0047】
信号前処理部22は、端末装置2の位置測定結果が同一の値となる場合又は所定の範囲内に収まる場合、すなわち、端末装置2が取り付けられた第1の移動物体3が同一の位置にあると判定される場合の受信波形を対象として、それら受信波形のアンサンブル平均を計算し、計算されたアンサンブル平均を特徴量生成部23に入力する。アンサンブル平均の計算によってノイズ成分が除去され、信号解析に適した波形のみを抽出することができるため、信号前処理部22においてアンサンブル平均の処理を行うことは好適である。
【0048】
本実施の形態のように、ネットワーク5によって無線機1及び処理装置6が接続された構成の場合、第1の無線機1がUWBインパルス無線信号4を送信した時刻と一つの第2の無線機1が前記UWBインパルス無線信号4を受信した時刻とがネットワーク5を通じて処理装置6の通信部21に入力される。
【0049】
信号前処理部22は、信号送信時刻と信号受信時刻によって示される信号の同期点を計算し、1台の第2の無線機1が異なるタイミングで受信した受信波形31、受信波形32及び受信波形33を、各々の信号について算出された同期点を基準として重ね合わせ、信号強度の平均、すなわち、アンサンブル平均34を計算する。
【0050】
また、処理装置6は、第1の無線機1によるUWBインパルス無線信号4の送信時刻又は第2の無線機1によるUWBインパルス無線信号4の受信時刻が通知されない場合でも、受信波形の相関が最大となる点を計算することによって、同期点を検出することができ、これによって、推定された同期点における前記受信波形31、受信波形32及び受信波形33のアンサンブル平均34を求めることができる。
【0051】
図3に示す処理装置6の構成の説明に戻る。
【0052】
特徴量生成部23は、信号前処理部22において前処理をした受信波形を解析し、複数の特徴量を抽出する。特徴量生成部23は、通信部21、信号前処理部22及び特徴量比較部24に接続される。
【0053】
特徴量生成部23は第1の移動物体3による受信波形から抽出された第1の特徴量(例えば、特徴ベクトル)と端末装置2から伝送された位置情報とを対応付け、対応付けられた情報を通信部21に出力し、処理装置6の通信部21はこれらの情報をデータベース装置7へ伝送する。データベース装置7は、受信波形から抽出された特徴量と端末装置2の位置情報とを対応付けた情報を対応データに記録する。
【0054】
また、特徴量生成部23は、端末装置等が取り付けられていない第2の移動物体による受信波形を解析し、第2の特徴量を抽出する。
【0055】
なお、特徴量とは、一般に信号の特徴を表す物理量であり、様々な種類が存在する。例えば、信号の統計値(信号の平均値、分散、中央値、最大値、最小値、最頻値等)、信号のスペクトル等周波数成分に関する特徴量、キャリブレーション値(空間内に移動物体が存在しない場合の受信波形と、空間内にあらかじめ定められた人数の人間がいる場合の受信波形と、移動物体が等速であらかじめ定められた軌跡を移動している場合の受信波形等との差分値相関値(又はある時刻の信号受信波形と一定時間前の受信波形との差分値、過去数回分の受信波形の平均値等)、無線信号による受信波形とカメラ画像マイクロフォン等のセンサによる出力値との差分値相関値等がある。
【0056】
また、抽出されたすべての特徴量を使用する必要はなく、必要に応じて、いくつかを組み合わせてベクトルとして用いてもよい。例えば、受信信号の平均値と分散値を組にして特徴ベクトルとして用いることが考えられる。
【0057】
本実施の形態においては、特に、特徴量生成部23は特徴量として受信信号の遅延プロファイルを計算するのが好適である。
【0058】
図5は、本発明の第1の実施の形態の受信波形の遅延プロファイル特性の一例を示す図である。
【0059】
遅延プロファイルは無線信号に特有の特徴量であり、マルチパスを経由して受信機に到達した信号に関し、遅延波到達までの遅れ時間とその強度分布を示す。この遅延プロファイルは伝播路の状態によって変化するため、空間8の物理的な状態を表しているといえる。図5に示す波形の最も高いピークは移動物体から反射して受信機に到達した直接波であり、直接波の次に現れたいくつかのピークは空間8を伝播した反射波である。その他の小さな波はノイズ成分を表している。
【0060】
なお、特徴量生成部23における特徴量の抽出は、UWBインパルス無線信号4を受信する第2の無線機1側において行われてもよい。この場合は、無線機1に汎用のプロセッサ又は特徴量計算を行う専用のLSIを組み込むとよい。
【0061】
再び、図3に示す処理装置6の構成の説明に戻る。
【0062】
特徴量比較部24は、受信波形から抽出された特徴量を比較する。特徴量比較部24は、通信部21及び特徴量生成部23に接続される。
【0063】
特徴量比較部24は、データベース装置7に記録されている第1の移動物体3による受信波形の第1の特徴量と、端末装置等が取り付けられていない第2の移動物体による受信波形の第2の特徴量とを比較して、これらが一致する結果を得た場合、その特徴量に対応付けられている端末装置2の位置を、第2の移動物体の位置として出力する。
【0064】
なお、特徴量比較部24は、受信波形の特徴量を比較する場合、複数の特徴量の近接性又は類似性の大小関係を判定する。具体的な基準としては、比較する特徴量の間のユークリッド距離、マハラノビス距離、相関係数、差分値等がある。これらは使用される環境に適応するように変更することができる。
【0065】
さらに、前記特徴量比較部24は、少なくとも1台以上の第2の無線機1によって受信された受信波形の第2の特徴量の変化によって、端末装置等が取り付けられていない第2の移動物体の移動を検出し、これを出力する機能をもつ。ここで、前記第2の移動物体の移動の検出は、特徴量の比較に基づく。例えば、特徴量比較部24は、第2の無線機1によって受信された受信波形の第2の特徴量と、この第2の特徴量の受信前に受信した受信波形の第2の特徴量との間のユークリッド距離を計算し、計算されたユークリッド距離が所定の閾値を超えた場合は第2の移動物体が移動したと判断する。
【0066】
次に、本発明の実施の形態において、移動物体にセンサ、無線タグ、通信端末装置等を取り付けず、移動物体に負担を与えずに移動物体の位置及び移動を検出する方法を、図6から図9を用いて説明する。
【0067】
図6は、本発明の第1の実施の形態において、端末装置2の位置測定結果と第1の移動物体3による受信波形の第1の特徴量とを対応付けて記録する処理を示すフローチャートである。
【0068】
端末装置2が取り付けられた第1の移動物体3が空間8内を移動する場合、空間8の電波伝播環境は前記第1の移動物体3自身によって変化する。したがって、第1の移動物体3による受信波形は、第1の移動物体3の位置に依存して変化する。
【0069】
初めに、第1の移動物体3に取り付けられた端末装置2は、自身の位置を測定し、得られた位置情報及び測定したタイミングを処理装置6に伝送する(ステップS10)。端末11の位置は、すなわち、受信波形に変化をもたらす第1の移動物体3の位置である。なお、端末装置2の位置測定方法については、図8を用いて後述する。
【0070】
次に、第1の無線機1は、ステップS10において端末装置2の位置測定が行われたことをネットワーク5を通じて認識した後、第1の移動物体3が存在する空間8に向けて、UWBインパルス無線信号4を送信し、送信回数をカウントする(ステップS11)。
【0071】
次に、処理装置6は第1の移動物体3に取り付けられた端末装置2が移動したか否かをと判断する(ステップS11A)。ステップS11Aにおいて、端末装置2が移動していないと判断された場合は、ステップS12に進み、端末装置2が移動したと判断された場合は、無線機1におけるUWBインパルス無線信号4の送信回数のカウンタを初期化してカウンタを0に戻す(ステップS11B)。これらの処理によって、処理装置6は、受信波形に変化をもたらす第1の移動物体3が同一の座標に位置している間に、複数回の送信タイミング分の受信波形を取得することができ、取得された受信波形を重ね合わせることによって、より正確なアンサンブル平均を計算することができる。
【0072】
なお、端末装置2の移動は、ステップS10において端末装置2から処理装置6へ通知された端末装置2の位置測定結果が前回のタイミングで測定された結果と同一でない又は所定の範囲内にないと判定されることによって検出される。
【0073】
次に、第1の無線機1以外の少なくとも1台以上の第2の無線機1は、空間8の伝播した前記UWBインパルス無線信号4を、アンテナ11を通じてUWB無線信号受信部15で受信し、受信波形を計測する(ステップS12)。
【0074】
このとき、UWBインパルス無線信号4を送信した第1の無線機1と、UWBインパルス無線信号4を受信する第2の無線機1とは、ネットワーク5によって相互に接続されているので、第1の無線機1は、UWBインパルス無線信号4を送信したことを通知するトリガを信号生成制御部12において作成し、通信部14に出力し、ネットワーク5を通じて第2の無線機1に通知してもよい。
【0075】
第2の無線機1は、計測された受信波形を、ネットワーク5を通じて処理装置6へ伝送する(ステップS13)。
【0076】
次に、処理装置6の信号前処理部22は、第1の無線機1がUWBインパルス無線信号4を送信したタイミング及び第2の無線機1がUWBインパルス無線信号4を受信したタイミングを用いて、受信波形の前処理として、ノイズ除去のための信号前処理を行う(ステップS14)。
【0077】
この信号前処理には、既に述べたとおり、移動平均を計算する処理、低域通過フィルタリングによる処理、複数の受信波形のアンサンブル平均の計算の処理等がある。信号前処理部22は、信号解析に適した波形に整形した受信波形を特徴量生成部23に入力する。また、この前処理は、第2の無線機1が無線信号14を受信した時点で、第2の無線機1内で行ってもよい。この場合は、無線機1に汎用のプロセッサを組み込み、このプロセッサによって計算してもよいが、無線機1に前処理機能に特化した回路構成を含む専用のLSIを組み込み、これを使用することが好適である。
【0078】
次に、特徴量生成部23は、信号前処理部22から入力された受信波形を解析し、受信波形から第1の特徴量を抽出する(ステップS15)。
【0079】
特徴量の要素は既出のとおりであり、遅延プロファイルのほか、例えば、信号の平均値、分散、中央値、最大値、最小値、最頻値等の統計量、信号のスペクトル等周波数成分に関する特徴量、キャリブレーション値、すなわち、空間内に移動物体がない場合の受信波形と、空間内に人間があらかじめ定められた人数がいる場合の受信波形と、移動物体が等速であらかじめ定められた軌跡を移動している場合の受信波形等との差分値及び相関値、一定時間前の受信波形との差分値、過去数回分の受信波形の平均値、カメラ画像やマイクロフォン等の無線信号以外のセンサの出力値と受信波形との差分値及び相関値がある。
【0080】
なお、特徴量の抽出は、無線機1に汎用のプロセッサを組み込み、この汎用のプロセッサで計算してもよいが、信号処理の計算量が膨大になる場合は、無線機1に特徴ベクトル抽出に適する回路構成を含む専用のLSIを組み込み、これを使用することが好適である。
【0081】
次に、特徴量生成部23は、抽出された第1の特徴量と、ステップS10において通知されている端末装置2の位置情報とを対応付け、対応付けられた情報をデータベース装置7に記録する(ステップS16)。
【0082】
また、データベース装置7へ、対応付けられた情報をエントリとして記録する場合において、そのエントリと同一の端末装置2の位置が記載されたエントリが既に存在するときは、既に存在するエントリをその新しいエントリと置き換えてもよいし、既に存在するエントリとその新しいエントリとの平均をとって最新のエントリとしてよい。また、その新しいエントリを、既に存在するエントリとは異なるエントリとして保存してもよい。
【0083】
以上の手順を繰り返すことによって、データベース装置7の対応データのエントリが次々に蓄積され、空間8の観測領域を網羅していく。また、逐次情報を更新するため、伝播環境が変化した場合でもその変化に追従することができる。
【0084】
また、キャリブレーションとして、観測領域に一切の移動物体が存在しない場合の特徴量(特徴ベクトル)、移動物体が等速である定められた方向に移動している場合の特徴量(特徴ベクトル)等を取得してもよい。等速度運動する移動物体の特徴量を取得することによって、移動物体の移動方向の変化を検出することができる。
【0085】
次に、処理装置6(又は無線機1)は、UWBインパルス無線信号4が所定のパルス回数分送信された否かを判定する(ステップS17)。
【0086】
UWBインパルス無線信号4が所定の回数分送信されていないと判定された場合は、所定の回数に達するまで、ステップS10からステップS16までの処理が繰り返される。これによって、第1の移動物体3による受信波形のパターンを多く集めることができ、より正確なアンサンブル平均を計算することができる。
【0087】
一方、UWBインパルス無線信号4が所定の回数分送信されたと判定された場合は、処置装置16(又は無線機1)は、第1の無線機1と第2の無線機1とを交互に入れ替えるよう指令する(ステップS18)。第1の無線機1とは別の位置に設置されている他の無線機1からUWBインパルス無線信号4を送信することによって、無線機1の配置を変更することなく、より多くの定点から受信波形のパターンを得ることができる。
【0088】
以上、図6に示すステップS10からステップS18までの処理によって、端末装置2の位置情報、すなわち、第1の移動物体3の位置情報と第1の移動物体3による受信波形の第1の特徴量とが対応付けられ、対応付けられた情報がデータベース装置7の対応データに記録された。
【0089】
次に、端末装置等が取り付けられていない第2の移動物体の位置を測定する処理を説明する。第2の移動物体が空間8を移動する場合、空間8の電波伝播環境は前記第2の移動物体自身によって変化する。したがって、無線機1によって得られる受信波形は第2の移動物体の位置に依存したパターンとなる。
【0090】
図7は、本発明の第1の実施の形態において、第2の移動物体による受信波形から抽出された第2の特徴量とデータベース装置7に記録された第1の特徴量とを比較し、第2の移動物体の位置を出力する処理を示すフローチャートである。
【0091】
初めに、第1の無線機1は、端末装置等が取り付けられていない第2の移動物体が存在する空間8に向けて、UWBインパルス無線信号4を送信する(ステップS20)。第1の無線機1以外の少なくとも1台以上の第2の無線機1は、空間8内を伝播したUWBインパルス無線信号4をアンテナ11を通じてUWBインパルス無線信号受信部15で受信し、第2の移動物体による受信波形を計測する(ステップS21)。次に、前記第2の無線機1は、計測された受信波形をネットワーク5を通じて処理装置6に伝送する(ステップS22)。
【0092】
次に、処理装置6の信号前処理部22は、入力された受信波形の前処理を行い、信号解析に適した波形に整形された受信波形を特徴量生成部23に入力する(ステップS23)。
【0093】
なお、この前処理は前述のステップS14と同様のノイズ除去処理である。例えば、移動平均を計算する処理、低域通過フィルタによる処理、及び複数の受信波形のアンサンブル平均を計算する処理等があるが、本実施の形態においては、処理装置6の信号前処理部22はアンサンブル平均の計算をするのが好適である。また、この信号前処理は、第2の無線機1が、UWBインパルス無線信号4を受信したときに、第2の無線機1内において行われてもよい。この場合、無線機1に汎用のプロセッサを組み込み、この汎用のプロセッサで計算してもよいが、無線機1に前処理機能に適する回路構成を含む専用のLSIを組み込み、これを使用することが好適である。
【0094】
次に、処理装置6の特徴量生成部23は、入力された受信波形を解析し、第2の特徴量を抽出する(ステップS24)。特徴量生成部23は第2の移動物体による受信波形から抽出した第2の特徴量を特徴量比較部24に出力する。
【0095】
ここで、抽出される特徴ベクトルの要素は既に説明したとおりであり、遅延プロファイルのほか、例えば、信号の平均値、分散、中央値、最大値、最小値、最頻値等の統計量、信号のスペクトル等、周波数成分に関する特徴量、キャリブレーション値、すなわち、空間内に移動物体が存在しない場合の受信波形と、空間内に人間があらかじめ定められた人数が存在する場合の受信波形と、移動物体が等速であらかじめ定められた軌跡を移動している場合の受信波形等との差分値及び相関値、一定時間前の受信波形との差分値、過去数回分の受信波形の平均値、カメラ画像及びマイクロフォン等の無線信号以外のセンサの出力値と受信波形との差分値及び相関値があるが、前述のステップS15で計算したものと同じ特徴量を用いる。この場合、無線機1に汎用のプロセッサを組み込み、この汎用のプロセッサで計算してもよいが、無線機1に特徴ベクトル抽出に適する回路構成を含む専用のLSIを組み込み、これを使用することが好適である。
【0096】
ステップS24によって、処理装置6の特徴量比較部24は、第2の移動物体による受信波形から抽出された第2の特徴量を得た。次に、特徴量比較部24は、データベース装置7に記録された対応データを参照し、第2の特徴量に対して特徴量間の距離が最近傍である第1の特徴量のエントリがあるか否かを判定する(ステップS25)。
【0097】
なお、特徴量の比較には最近傍決定則に従う手法を用いる。すなわち、データベース装置7に記録されている第1の特徴量の集合を特徴空間上にマッピングし、マッピングされた第1の特徴量と新たに得られた第2の特徴量とが前記特徴空間上で最近傍となるクラスを照合結果として出力する手法である。具体的には、すべての第1の特徴量と新たに得られた第2の特徴量と間のユークリッド距離を計算し、ユークリッド距離が最も小さくなる第1の特徴量のエントリを第2の特徴量に対して最近傍である特徴量として出力する。また、ユークリッド距離を用いずにマハラノビス距離、相関係数、差分値等を用いてもよい。
【0098】
また、第2の特徴量と第2の特徴量に対して最近傍であるとして出力された第1の特徴量との信号波形間の相関係数を計算し、相関係数が閾値を超えた場合に限って端末の座標を出力するステップS26をステップS25の次に設けてもよい。
【0099】
ステップS25において、第2の特徴量に対して最近傍である第1の特徴量のエントリがあると判定され、必要に応じてステップS26を設定した場合は、次に、該第1の特徴量と該第2の特徴量との間の相関係数を計算し、計算された相関係数が所定の閾値を超える否かを判定する(ステップS26)。ステップS26において、相関係数が閾値を超えると判定された場合は、該第1の特徴量のエントリに記載された端末装置2の位置を第2の移動物体の位置として出力する(ステップS27)。
【0100】
なお、処理装置6は、出力した第2の移動物体の位置と時刻を空間8上にプロットすることによって、第2の移動物体の移動経路又は速度を計算するようにしてもよい。この計算結果は、データベース装置7に記録されるよう構成してもよい。これによって、例えば、第2の移動物体がある位置に一定期間止まっていたのか又はどの方向に移動したのかを知ることができる。
【0101】
また、ステップS25において第2の特徴量に対して最近傍である第1の特徴量のエントリがないと判定された場合、及び、必要に応じて設定したステップS26において最近傍となった第1の特徴量と第2の特徴量との間の相関係数が所定の閾値を超えないと判定された場合は、第2の特徴量に一致する第1の特徴量はないと判断し、特徴量比較の処理を終了する。
【0102】
なお、ステップS25において、第1の特徴量と第2の特徴量が十分な確度をもって一致すると判定できる場合は、ステップS26を省略し、該第1の特徴量のエントリに記載された端末装置2の位置情報を第2の移動物体の位置として出力してもよい。
【0103】
また、ニューラルネットワークのような学習を行うネットワークによってデータベース装置7を構成する場合は、第2の特徴量をネットワークへの入力値とし、端末装置2の位置を出力値とする。入出力値の照合を取るアルゴリズムは、使用されるセンサ又は環境に適応するよう変更できるよう構成するのが好適である。例えば、人間によってこれを変更するアルゴリズムと、端末装置2の位置測定結果とその時点における端末装置2を備えた移動物体の測定結果との間の差を最小にするアルゴリズムとを、処理装置6が適応するように選択してもよい。
【0104】
次に、図6のステップS10に示した端末装置の位置測定の方法を説明する。
【0105】
図8は、本発明の第1の実施の形態における端末装置41の位置測定システムの構成図である。
【0106】
端末装置41の位置を測定する方法には、カメラの動画像による認識の方法、超音波による認識の方法、RFID又はICチップによる方法、UWBインパルス無線以外の無線による方法等がある。本発明の第1の実施の形態においては、端末装置41が送信する無線信号の伝播時間を計測することによって端末装置41の位置を決定する測定方法を用いる。
【0107】
無線信号の伝播時間を用いた測定方法には、大きく分けてTOA(Time of Arrival)とTDOA(Time Difference of Arrival)がある。前者は端末装置から複数の基地局装置までの信号の伝播時間から、端末装置の位置を測定する方法であり、後者は端末装置からの測位信号を基地局が受信する時刻と、位置が既知である基準基地局装置から発信された基準信号を基地局装置が受信した時刻との差から、端末装置の位置を測定する方法である。インパルス型のUWB無線信号は連続波の信号に比べて伝播時間を容易に計測することができる。よって、インパルス型のUWB無線信号を用いる測位システムは、TOA又はTDOAのいずれの方式も端末装置の位置測定に好適である。
【0108】
図8に示す端末位置測定システムは、少なくとも3台以上の基地局装置42及び端末位置解析装置45を備え、ネットワーク44によって接続される。端末装置41は測位信号43を送信する機能を備える。基地局装置42は、測位信号43を受信する機能を備え、ネットワーク44を通じて端末位置解析装置45に接続される。基地局装置42は、受信した測位信号43を位置解析装置86に伝送する。端末位置解析装置45は、ネットワーク44を通じて少なくとも3台以上の基地局装置42が計測した測位信号43の伝播時間のそれぞれを取得し、取得された伝播時間によって端末装置41の位置を計算する。
【0109】
上述したとおり、本発明の第1の実施の形態によれば、遅延プロファイルを含む受信波形の第1の特徴量と端末装置41が取り付けられた第1の移動物体3の位置とをあらかじめ対応付けて逐次記録することによって、障害物によって無線機と移動物体との見通し環境が得にくい屋内空間においても、センサ、無線タグ、通信端末装置等を取り付けることが困難な第2の移動物体に、これを取り付けることなく、その位置を測定し、また、移動を検出することができる。
【0110】
<実施形態2>
本発明の第2の実施の形態の測位システムの構成について説明する。
【0111】
図9は、本発明の第2の実施の形態の測位システムの構成図である。
【0112】
図8に示した端末装置の位置測定システムにおける基地局装置42及び端末位置解析装置45は、図1に示す測位システムにおける無線機1及び処理装置6とそれぞれ同一であってもよい。つまり、測位システムの無線機1は端末装置41の位置測定のための基地局装置42の機能を兼ね、処理装置6は端末位置解析装置45の機能を兼ねることができる。
【0113】
第2の実施の形態の測位システムは、端末装置51、基地局装置兼無線機52、端末位置解析装置兼処理装置55及びデータベース装置56を備え、各装置はネットワーク54によって接続される。端末装置51は、測位信号53を送信する機能を備える。基地局装置兼無線機52は、測位信号53を受信する機能を備え、ネットワーク54を通じて端末位置解析装置兼処理装置55に接続され、受信した測位信号53を端末位置解析装置兼処理装置55に伝送する。端末位置解析装置兼処理装置55は、ネットワーク54を通じて基地局装置兼無線機52が受信した少なくとも3台以上の測位信号53の伝播時間を取得し、その伝播時間によって端末装置51の位置を計算する。
【0114】
第2の実施の形態の測位システムにおける処理は、図6に示すステップS10からステップS18までの処理及び図7に示すステップS20からステップS27までの処理と同一であり、図6のステップS10に示す端末位置測定の処理は、基地局装置兼無線機52及び端末位置解析装置兼処理装置55が行う。
【0115】
以上、説明したとおり、本発明の第2の実施の形態は、第1の実施の形態と比較すると、端末装置の位置測定を、受信波形を計測する無線機及び処理装置が行う点で異なる。これによって、第2の実施の形態では、システム構成を簡略化することができる。
【図面の簡単な説明】
【0116】
【図1】本発明の第1の実施の形態の測位システムの構成図である。
【図2】本発明の第1の実施の形態の無線機の構成を示すブロック図である。
【図3】本発明の第1の実施の形態の処理装置の構成を示すブロック図である。
【図4】本発明の第1の実施の形態の受信波形のアンサンブル平均計算の概念図である。
【図5】本発明の第1の実施の形態の受信波形の遅延プロファイル特性を示す図である。
【図6】本発明の第1の実施の形態の端末装置測位結果と受信波形の特徴量とを対応付けて記録する処理を示すフローチャートである。
【図7】本発明の第1の実施の形態の移動物体の位置を出力する処理を示すフローチャートである。
【図8】本発明の第1の実施の形態の端末装置測位システムの構成図である。
【図9】本発明の第2の実施の形態の測位システムの構成図である。
【符号の説明】
【0117】
1 無線機
2 端末装置
3 移動物体
4 UWBインパルス無線信号
5 ネットワーク
6 処理装置
7 データベース装置
8 空間
11 アンテナ
12 信号生成制御部
13 UWBインパルス無線信号送信部
14 通信部
15 UWBインパルス無線信号受信部
21 通信部
22 信号前処理部
23 特徴量生成部
24 特徴量比較部
31 受信波形
32 受信波形
33 受信波形
34 受信波形のアンサンブル平均
42 基地局装置
43 測位信号
44 ネットワーク
45 端末位置解析装置
52 基地局装置兼無線機
53 測位信号
54 ネットワーク
55 端末位置解析装置兼処理装置
56 データベース装置
57 空間
58 移動物体
【特許請求の範囲】
【請求項1】
受信した信号の波形の解析結果を用いて、移動物体の位置を測定する測位システムであって、
第1の移動物体に取り付けられた端末装置の位置を測定する端末位置測定装置と、
少なくとも送信機を備える第1の無線装置と、
少なくとも受信機を備える第2の無線装置と、
前記第1の無線装置が送信した直接波、及び、第1の移動物体によって反射した反射波による信号の波形を解析して、第1の解析結果を生成する処理装置と、
前記処理装置によって生成された第1の解析結果と前記第1の移動物体の位置とを記録するデータベースと、を備え、
前記処理装置は、
前記端末位置測定装置によって測定された前記端末装置の位置と前記第1の解析結果とを対応させて前記データベースに記録し、
前記第1の無線装置が送信した直接波、及び、第2の移動物体によって反射した反射波による信号の波形を取得した場合、該取得した波形から生成された第2の解析結果と、前記データベースに記録された第1の解析結果とを比較し、
前記第2の解析結果が前記第1の解析結果に該当すると判定された場合に、当該該当する第1の解析結果に対応する端末装置の位置を、前記第2の移動物体の位置と決定することを特徴とする測位システム。
【請求項2】
前記第1及び第2の無線装置は、インパルス型のUWB無線信号を送受信することを特徴とする請求項1に記載の測位システム。
【請求項3】
前記第1及び第2の無線装置は、送信機及び受信機を備え、
前記第1の無線装置が送信した信号を前記第2の無線装置が受信した後に、前記第2の無線装置が信号を送信し、
前記第1の無線装置は、前記第2の無線装置が送信した信号を受信し、
前記処理装置は、前記第1及び第2の無線装置が受信した信号の受信波形から前記第2の解析結果を生成することを特徴とする請求項1に記載の測位システム。
【請求項4】
前記処理装置は、
前記受信波形を解析に適したデータに変換する信号処理部と、
前記変換されたデータを解析して、解析結果として特徴量を生成し、前記生成された特徴量をデータベースに記録する特徴量生成部と、
前記生成された特徴量の間の距離を計算することによって、前記特徴量を比較する特徴量比較部と、を備え、
前記特徴量生成部は、前記端末位置測定装置によって測定された前記端末装置の位置と前記第1の特徴量とを対応付けて前記データベースに記録し、
前記特徴量比較部は、前記受信波形を取得した場合、該取得した受信波形から生成された第2の特徴量と、前記データベースに記録された第1の特徴量との間の距離を比較し、前記第2の特徴量から最近傍となる前記第1の特徴量を特徴空間中から選択することを特徴とする請求項1に記載の測位システム。
【請求項5】
前記特徴量生成部は、前記受信波形の遅延プロファイルから前記特徴量を生成することを特徴とする請求項4に記載の測位システム。
【請求項6】
前記特徴量比較部は、前記第2の特徴量に対して最近傍であるとして選択された第1の特徴量と前記第2の特徴量との間の相関が所定の閾値を超えない場合、前記第2の特徴量に該当する前記第1の特徴量が前記データベースにはないと判定することを特徴とする請求項4に記載の測位システム。
【請求項7】
前記信号処理部は、アンサンブル平均を計算することによって、受信波形を解析に適したデータに変換することを特徴とする請求項1に記載の測位システム。
【請求項8】
前記端末位置測定装置は、少なくとも三つの受信機を備え、
前記各受信機が受信したインパルス型のUWB無線信号を用いて、第1の移動物体に取り付けられた端末装置の位置を測定することを特徴とする請求項1に記載の測位システム。
【請求項9】
前記受信機は、前記第2の無線装置であることを特徴とする請求項8に記載の測位システム。
【請求項10】
前記処理装置は、前記第1の解析結果と前記第2の解析結果との比較によって測定した第2の移動物体の位置を繰り返し記録し、前記第2の移動物体の移動経路を算出することを特徴とする請求項1に記載の測位システム。
【請求項11】
受信した信号の波形の解析結果を用いて、移動物体の位置を測定する測位システムに備わる処理装置であって、
前記測位システムは、
第1の移動物体に取り付けられた端末装置の位置を測定する端末位置測定装置と、
少なくとも送信機を備える第1の無線装置と、
少なくとも受信機を備える第2の無線装置と、
前記処理装置によって生成された第1の解析結果と前記第1の移動物体の位置とを記録するデータベースと、を備え、
前記処理装置は、
前記第1の無線装置が送信した直接波、及び、第1の移動物体によって反射した反射波による信号の波形を解析して、第1の解析結果を生成し、
前記端末位置測定装置によって測定された前記端末装置の位置と前記第1の解析結果とを対応させて前記データベースに記録し、
前記第1の無線装置が送信した直接波、及び、第2の移動物体によって反射した反射波による信号の波形を取得した場合、該取得した波形から生成された第2の解析結果と、前記データベースに記録された第1の解析結果とを比較し、
前記第2の解析結果が前記第1の解析結果に該当すると判定された場合に、当該該当する第1の解析結果に対応する端末装置の位置を、前記第2の移動物体の位置と決定することを特徴とする処理装置。
【請求項12】
前記受信波形を解析に適したデータに変換する信号処理部と、
前記変換されたデータを解析して、解析結果として特徴量を生成し、前記生成された特徴量をデータベースに記録する特徴量生成部と、
前記生成された特徴量の間の距離を計算することによって、前記特徴量を比較する特徴量比較部と、を備え、
前記特徴量生成部は、前記端末位置測定装置によって測定された前記端末装置の位置と前記第1の特徴量とを対応付けて前記データベースに記録し、
前記特徴量比較部は、前記受信波形を取得した場合、該取得した受信波形から生成された第2の特徴量と、前記データベースに記録された第1の特徴量との間の距離を比較し、前記第2の特徴量から最近傍となる前記第1の特徴量を特徴空間中から選択することを特徴とする請求項11に記載の処理装置。
【請求項13】
前記特徴量生成部は、前記受信波形の遅延プロファイルから前記特徴量を生成することを特徴とする請求項12に記載の処理装置。
【請求項14】
前記特徴量比較部は、前記第2の特徴量に対して最近傍であるとして選択された第1の特徴量と前記第2の特徴量との間の相関が所定の閾値を超えない場合、前記第2の特徴量に該当する前記第1の特徴量が前記データベースにはないと判定することを特徴とする請求項12に記載の処理装置。
【請求項15】
前記信号処理部は、アンサンブル平均を計算することによって、受信波形を解析に適したデータに変換することを特徴とする請求項12に記載の処理装置。
【請求項16】
前記第1の解析結果と前記第2の解析結果との比較によって測定した第2の移動物体の位置を繰り返し記録し、前記第2の移動物体の移動経路を算出することを特徴とする請求項11に記載の処理装置。
【請求項1】
受信した信号の波形の解析結果を用いて、移動物体の位置を測定する測位システムであって、
第1の移動物体に取り付けられた端末装置の位置を測定する端末位置測定装置と、
少なくとも送信機を備える第1の無線装置と、
少なくとも受信機を備える第2の無線装置と、
前記第1の無線装置が送信した直接波、及び、第1の移動物体によって反射した反射波による信号の波形を解析して、第1の解析結果を生成する処理装置と、
前記処理装置によって生成された第1の解析結果と前記第1の移動物体の位置とを記録するデータベースと、を備え、
前記処理装置は、
前記端末位置測定装置によって測定された前記端末装置の位置と前記第1の解析結果とを対応させて前記データベースに記録し、
前記第1の無線装置が送信した直接波、及び、第2の移動物体によって反射した反射波による信号の波形を取得した場合、該取得した波形から生成された第2の解析結果と、前記データベースに記録された第1の解析結果とを比較し、
前記第2の解析結果が前記第1の解析結果に該当すると判定された場合に、当該該当する第1の解析結果に対応する端末装置の位置を、前記第2の移動物体の位置と決定することを特徴とする測位システム。
【請求項2】
前記第1及び第2の無線装置は、インパルス型のUWB無線信号を送受信することを特徴とする請求項1に記載の測位システム。
【請求項3】
前記第1及び第2の無線装置は、送信機及び受信機を備え、
前記第1の無線装置が送信した信号を前記第2の無線装置が受信した後に、前記第2の無線装置が信号を送信し、
前記第1の無線装置は、前記第2の無線装置が送信した信号を受信し、
前記処理装置は、前記第1及び第2の無線装置が受信した信号の受信波形から前記第2の解析結果を生成することを特徴とする請求項1に記載の測位システム。
【請求項4】
前記処理装置は、
前記受信波形を解析に適したデータに変換する信号処理部と、
前記変換されたデータを解析して、解析結果として特徴量を生成し、前記生成された特徴量をデータベースに記録する特徴量生成部と、
前記生成された特徴量の間の距離を計算することによって、前記特徴量を比較する特徴量比較部と、を備え、
前記特徴量生成部は、前記端末位置測定装置によって測定された前記端末装置の位置と前記第1の特徴量とを対応付けて前記データベースに記録し、
前記特徴量比較部は、前記受信波形を取得した場合、該取得した受信波形から生成された第2の特徴量と、前記データベースに記録された第1の特徴量との間の距離を比較し、前記第2の特徴量から最近傍となる前記第1の特徴量を特徴空間中から選択することを特徴とする請求項1に記載の測位システム。
【請求項5】
前記特徴量生成部は、前記受信波形の遅延プロファイルから前記特徴量を生成することを特徴とする請求項4に記載の測位システム。
【請求項6】
前記特徴量比較部は、前記第2の特徴量に対して最近傍であるとして選択された第1の特徴量と前記第2の特徴量との間の相関が所定の閾値を超えない場合、前記第2の特徴量に該当する前記第1の特徴量が前記データベースにはないと判定することを特徴とする請求項4に記載の測位システム。
【請求項7】
前記信号処理部は、アンサンブル平均を計算することによって、受信波形を解析に適したデータに変換することを特徴とする請求項1に記載の測位システム。
【請求項8】
前記端末位置測定装置は、少なくとも三つの受信機を備え、
前記各受信機が受信したインパルス型のUWB無線信号を用いて、第1の移動物体に取り付けられた端末装置の位置を測定することを特徴とする請求項1に記載の測位システム。
【請求項9】
前記受信機は、前記第2の無線装置であることを特徴とする請求項8に記載の測位システム。
【請求項10】
前記処理装置は、前記第1の解析結果と前記第2の解析結果との比較によって測定した第2の移動物体の位置を繰り返し記録し、前記第2の移動物体の移動経路を算出することを特徴とする請求項1に記載の測位システム。
【請求項11】
受信した信号の波形の解析結果を用いて、移動物体の位置を測定する測位システムに備わる処理装置であって、
前記測位システムは、
第1の移動物体に取り付けられた端末装置の位置を測定する端末位置測定装置と、
少なくとも送信機を備える第1の無線装置と、
少なくとも受信機を備える第2の無線装置と、
前記処理装置によって生成された第1の解析結果と前記第1の移動物体の位置とを記録するデータベースと、を備え、
前記処理装置は、
前記第1の無線装置が送信した直接波、及び、第1の移動物体によって反射した反射波による信号の波形を解析して、第1の解析結果を生成し、
前記端末位置測定装置によって測定された前記端末装置の位置と前記第1の解析結果とを対応させて前記データベースに記録し、
前記第1の無線装置が送信した直接波、及び、第2の移動物体によって反射した反射波による信号の波形を取得した場合、該取得した波形から生成された第2の解析結果と、前記データベースに記録された第1の解析結果とを比較し、
前記第2の解析結果が前記第1の解析結果に該当すると判定された場合に、当該該当する第1の解析結果に対応する端末装置の位置を、前記第2の移動物体の位置と決定することを特徴とする処理装置。
【請求項12】
前記受信波形を解析に適したデータに変換する信号処理部と、
前記変換されたデータを解析して、解析結果として特徴量を生成し、前記生成された特徴量をデータベースに記録する特徴量生成部と、
前記生成された特徴量の間の距離を計算することによって、前記特徴量を比較する特徴量比較部と、を備え、
前記特徴量生成部は、前記端末位置測定装置によって測定された前記端末装置の位置と前記第1の特徴量とを対応付けて前記データベースに記録し、
前記特徴量比較部は、前記受信波形を取得した場合、該取得した受信波形から生成された第2の特徴量と、前記データベースに記録された第1の特徴量との間の距離を比較し、前記第2の特徴量から最近傍となる前記第1の特徴量を特徴空間中から選択することを特徴とする請求項11に記載の処理装置。
【請求項13】
前記特徴量生成部は、前記受信波形の遅延プロファイルから前記特徴量を生成することを特徴とする請求項12に記載の処理装置。
【請求項14】
前記特徴量比較部は、前記第2の特徴量に対して最近傍であるとして選択された第1の特徴量と前記第2の特徴量との間の相関が所定の閾値を超えない場合、前記第2の特徴量に該当する前記第1の特徴量が前記データベースにはないと判定することを特徴とする請求項12に記載の処理装置。
【請求項15】
前記信号処理部は、アンサンブル平均を計算することによって、受信波形を解析に適したデータに変換することを特徴とする請求項12に記載の処理装置。
【請求項16】
前記第1の解析結果と前記第2の解析結果との比較によって測定した第2の移動物体の位置を繰り返し記録し、前記第2の移動物体の移動経路を算出することを特徴とする請求項11に記載の処理装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−32442(P2010−32442A)
【公開日】平成22年2月12日(2010.2.12)
【国際特許分類】
【出願番号】特願2008−196881(P2008−196881)
【出願日】平成20年7月30日(2008.7.30)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.MySQL
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成22年2月12日(2010.2.12)
【国際特許分類】
【出願日】平成20年7月30日(2008.7.30)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.MySQL
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]