
測位システム及び通信端末
【課題】安定して確実に通信端末の現在位置を取得可能な測位システムを提供する。
【解決手段】位置を示す位置情報を含んだ位置情報信号を人工衛星2から送信される衛星
測位信号と互換性を有する信号として送信する位置情報送信機100と、衛星測位信号を
受信すると人工衛星2の位置を求めることにより自身の現在位置を求め、位置情報信号を
受信すると位置情報に基づき自身の現在位置を求める通信端末200とを含む測位システ
ム1において、位置情報送信機100から、通信端末200の各相関器を衛星測位信号又
は位置情報信号のいずれを受信するように設定するかを決定する境界フラグ311を含む
位置情報信号を送信し、通信端末200が、境界フラグ311に基づき相関器が衛星測位
信号又は位置情報信号のいずれを受信するのかを設定するようにする。
【解決手段】位置を示す位置情報を含んだ位置情報信号を人工衛星2から送信される衛星
測位信号と互換性を有する信号として送信する位置情報送信機100と、衛星測位信号を
受信すると人工衛星2の位置を求めることにより自身の現在位置を求め、位置情報信号を
受信すると位置情報に基づき自身の現在位置を求める通信端末200とを含む測位システ
ム1において、位置情報送信機100から、通信端末200の各相関器を衛星測位信号又
は位置情報信号のいずれを受信するように設定するかを決定する境界フラグ311を含む
位置情報信号を送信し、通信端末200が、境界フラグ311に基づき相関器が衛星測位
信号又は位置情報信号のいずれを受信するのかを設定するようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測位システム、位置情報送信機、通信端末、及び測位システムの制御方法に
関し、とくに安定して確実に通信端末の現在位置を取得できるようにする技術に関する。
【背景技術】
【0002】
GPS衛星等の人工衛星から送信されてくる無線信号(以下、衛星測位信号と称する。
)を利用して測位を行うシステムは、屋内やビル街地下街等の衛星測位信号を受信できな
いエリアにGPS受信機等の通信端末が入ってしまうと測位精度が低下し、もしくは測位
不能になってしまうという問題がある。
【0003】
そこで例えば特許文献1には、屋内や地下街等の衛星測位信号を受信できないエリアに
位置を示す信号である位置情報信号を送信する装置を設け、通信端末が位置情報信号を受
信することにより自身の現在位置を取得する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−278756号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、上記技術のような衛星測位信号による測位と位置情報信号による測位が可能
な通信端末が安定して確実に通信端末の現在位置を取得できるようにするには、衛星測位
信号と位置情報信号のいずれを受信すべきか適切に判断して通信端末の動作状態を設定す
る仕組みが必要である。
【0006】
本発明はこのような背景に基づいてなされたものであり、安定して確実に通信端末の現
在位置を取得することが可能な測位システム、位置情報送信機、通信端末、及び測位シス
テムの制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成する本発明のうちの一つは、測位システムであって、
位置を示す情報である位置情報を含んだ無線信号である位置情報信号を、人工衛星から
送信される測位のための無線信号である衛星測位信号と互換性を有する信号として送信す
る送信部を有する位置情報送信機と、
前記衛星測位信号を受信すると当該衛星測位信号から人工衛星の位置を求めることによ
り自身の現在位置を求め、前記位置情報信号を受信すると当該位置情報信号に含まれる前
記位置情報に基づき自身の現在位置を求める測位処理部、及び
夫々が前記無線信号を独立して受信可能な複数の相関器
を有する通信端末と、
を含み、
前記送信部が、前記相関器の夫々を前記衛星測位信号又は前記位置情報信号のいずれを
受信するように設定するかを決定するために用いる情報である動作モード決定情報を含む
前記位置情報信号を送信し、
前記通信端末が、受信した前記位置情報信号に含まれている前記動作モード決定情報に
基づき前記相関器が前記衛星測位信号又は前記位置情報信号のいずれを受信するのかを設
定する動作モード設定部を有することとする。
【発明の効果】
【0008】
本発明によれば、安定して確実に通信端末の現在位置を取得することができる。
【図面の簡単な説明】
【0009】
【図1】測位システム1の概略的な構成を示す図である。
【図2】位置情報送信機100のブロック図である。
【図3】位置情報データベース1122の一例である。
【図4】位置情報送信機100によって行われる位置情報信号の送信処理を説明するフローチャートである。
【図5】通信端末200のブロック図である。
【図6】動作モード設定処理を説明するフローチャートである。
【図7】各動作モードにおける相関器の設定例である。
【図8】測位処理を説明するフローチャートである。
【図9】衛星測位信号に基づく測位処理(S814)を説明するフローチャートである。
【図10】位置情報信号に基づく測位処理(S815)を説明するフローチャートである。
【図11】位置決定処理(S1017)を説明するフローチャートである。
【図12】各動作モードにおける相関器の設定例である。
【図13】動作モード設定処理を説明するフローチャートである。
【発明を実施するための形態】
【0010】
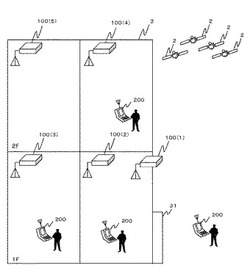
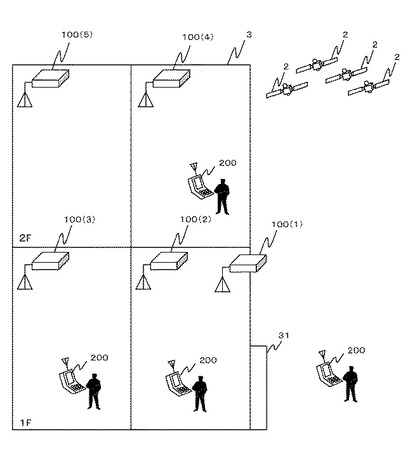
以下、本発明の実施形態につき図面とともに説明する。図1に本発明の実施形態として
説明する測位システム1の概略的な構成を示している。同図に示すように、測位システム
1は、測位のための無線信号(以下、衛星測位信号と称する。)を送信する複数の人工衛
星2、位置を示す情報を含んだ無線信号(以下、位置情報信号と称する。)を送信する複
数の位置情報送信機100、及び人工衛星2又は位置情報送信機100からの無線信号に
基づき自身の現在位置を取得する機能を有する通信端末200を含む。
【0011】
人工衛星2は、例えばGPS(Global Positioning System)、ガリレオ測位システム(Galileo positioning system)、GLONASS(Global Navigation Satellite System)、準天頂衛星(Quazi-Zenith Satellites)システム等の測位システムにおける人工衛星である。尚、以下の説明では人工衛星2はGPS衛星であるものとし、人工衛星2から送信される衛星測位信号、即ちGPS信号は、例えばL1信号(1575.42MHz)やL2信号(1227.6MHz)であるものとする。
【0012】
人工衛星2から送られてくる衛星測位信号にはいわゆる航法メッセージが含まれている
。航法メッセージは、例えば全体で25個のフレームを含み、各フレームは5個のサブフ
レームを含み、サブフレームは300ビットで構成される。各サブフレームは、例えば衛
星時計の補正情報、精密軌道情報(エフェメリス)、概略軌道情報(アルマナック)、電
離層補正情報、UTC補正情報、人工衛星の健康情報等を含む。
【0013】
人工衛星2から送られてくる衛星測位信号は、人工衛星2ごとに固有に付与された疑似ランダム符号(PRN番号(Pseudo Random Noise Code))であるC/Aコード(Coarse/Acquisition code)によってBPSK(Bi Phase Shift Keying)変調されている。
【0014】
位置情報送信機100から送信される位置情報信号は、人工衛星2から送信される衛星
測位信号と互換性を有しており、衛星測位信号と同様の変調方式及び同様のフレーム構成
の無線信号として送信される。各位置情報送信機100にもC/Aコードが付与されてお
り、位置情報信号は、送信される位置情報送信機100のC/AコードによってBPSK
変調されている。
【0015】
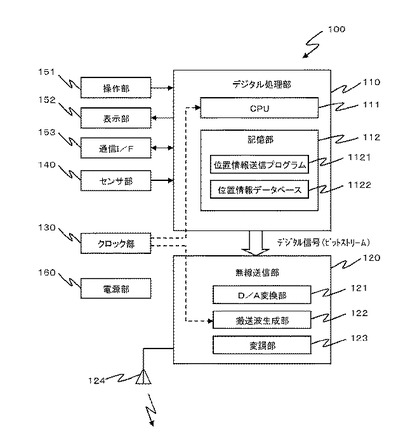
図2に位置情報送信機100のブロック図を示す。同図に示すように、位置情報送信機
100は、デジタル処理部110、無線送信部120、クロック部130、センサ部14
0、操作部151、表示部152、通信I/F153、及び電源部160を備えている。
【0016】
このうちデジタル処理部110は、CPU111、記憶部112(例えばRAM(Random Access Memory、ROM(Read Only Memory)、フラッシュメモリ等の不揮発性メモリ等の記憶装置)を含む。
【0017】
CPU111は、記憶部112に格納されているプログラムを実行することにより位置
情報送信機100が提供する様々な機能を実現する。記憶部112には、位置情報信号の
送信に関する機能(以下、位置情報送信部と称する。)を実現するプログラムである位置
情報送信プログラム1121、及び当該位置情報送信機100が設置されている位置(緯
度、経度、高度等)を示すデータが登録された位置情報データベース1122が格納され
ている。
【0018】
位置情報送信プログラム1121によって実現される位置情報送信部は、航法メッセー
ジ等の、位置情報送信機100から送信する位置情報信号に含ませるデータを自機のPR
N番号(C/Aコード)によってスペクトラム拡散したデジタル信号(ビットストリーム
)を生成し、生成したデジタル信号を無線送信部120に入力する。
【0019】
無線送信部120は、D/A変換部121、搬送波生成部122、変調部123、及び
アンテナ124を含む。
D/A変換部121は、デジタル処理部110から入力されるデジタル信号をアナログ
信号に変換する。
搬送波生成部122は、クロック部130から入力されるクロック信号に基づき位置情
報信号の搬送波を生成する。
変調部123は、D/A変換部121から入力されるアナログ信号により、搬送波生成
部122から入力される搬送波(位置情報信号がL1信号であれば1575.42MHz
)によって変調(BPSK変調)し、変調信号をアンテナ124に入力する。
【0020】
クロック部130は、CPU111を動作させるためのクロック信号や搬送波を生成す
るためのクロック信号(例えば1.023MHz)を生成する。クロック部130は、例えばTCXO(温度保証型水晶発振器)やOCXO(恒温槽型水晶発振器)等の発振器を含む。
【0021】
操作部151は、位置情報送信機100に対して操作入力を行うためのユーザインタフ
ェースであり、例えば操作ボタンやスイッチである。
表示部152は、位置情報送信機100に対して操作入力がされる際や位置情報送信機
100の動作状態の確認時に様々な情報を表示するインタフェースである。表示部152
は、例えば液晶モニタやLED(Light Emitting Diode)である。
【0022】
通信I/F153は、位置情報送信機100をコンピュータ(情報処理装置)等の外部
の装置に接続するための通信インタフェースである。通信I/F153は、例えばRS−232C、UART(Universal Asynchronous Receiver Transmitter)、オープンコレクタ(Open Collector)、TTL(Transistor-Transistor Logic)、パラレルI/F、USB(Universal Serial Bus)である。位置情報データベース1122へのデータの登録時や保守時等は、通信I/F153を介して位置情報送信機100にコンピュータが接続される。
【0023】
センサ部140は、気圧センサや照度センサ等の自身の現在の周囲環境を示す情報(設
置位置環境情報)を取得するセンサを含む。尚、後述するように、センサ部140から出
力される情報は、通信端末200が複数の位置情報信号を受信した場合における位置情報
信号の選択や、自身が現在位置を求める際の補正に用いられる。
電源部160は、位置情報送信機100の各部に駆動電力を供給する。
【0024】
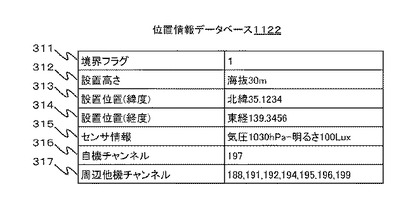
図3に位置情報データベース1122の一例を示す。位置情報データベース1122に
は、境界フラグ311、高さ312、位置情報送信機100の設置位置(緯度313、経
度314)、センサ情報315、自機チャンネル316、周辺他機チャンネル317等が
登録されている。以下、位置情報データベース1122に登録されている情報のことを位
置情報と称する。
【0025】
位置情報データベース1122に登録されている情報のうち、境界フラグ311には、
「1:オン」又は「0:オフ」が設定される。境界フラグ311は、通信端末200が、
自身の相関器の夫々を衛星測位信号又は位置情報信号のいずれを受信するのか(動作モー
ド)を設定するために用いられる情報(動作モード設定情報)である。境界フラグ311
の値は、例えば図1における建物3の出入口31付近に設けられた位置情報送信機100
(1)については「1:オン」に設定され、建物3内の他の位置情報送信機100(2)
〜(5)の境界フラグ311については「0:オフ」に設定される。
【0026】
センサ情報315には、センサ部140の各種センサによって検出されたリアルタイム
な検出値が設定される。
自機チャンネル316には、当該位置情報送信機100が送信する位置情報信号の送信
チャンネル(自機のC/Aコードに対応)を示す情報が設定される。
周辺他機チャンネル317には、その位置情報送信機100の周辺に設置されている他
の位置情報送信機100の位置情報信号の送信チャンネル(他機のC/Aコードに対応)
を示す情報が設定される。
【0027】
図4は位置情報送信機100によって行われる位置情報信号の送信処理を説明するフロ
ーチャートである。尚、以下の説明において、符号の前に付した「S」の文字はステップ
を意味する。
【0028】
位置情報信号の送信に際し、位置情報送信機100のデジタル処理部110は、先ず位
置情報データベース1122から位置情報信号に含ませる位置情報を取得する(S411
)。次にデジタル処理部110は、取得した位置情報を含んだ航法メッセージを生成し(
S412)、生成した航法メッセージをサブフレームに格納する(S413)。
【0029】
次にデジタル処理部110は、サブフレームに格納した航法メッセージを自機のC/A
コードでスペクトラム拡散したデジタル信号(ビットストリーム)を生成し(S414)
、生成したデジタル信号を無線送信部120に入力する(S415)。無線送信部120
は、入力されるデジタル信号によって搬送波を変調し、アンテナ124から位置情報信号
を送信する(S416)。尚、位置情報送信機100は、以上のようにして生成された位
置情報信号を所定のタイミングで繰り返し送信する。
【0030】
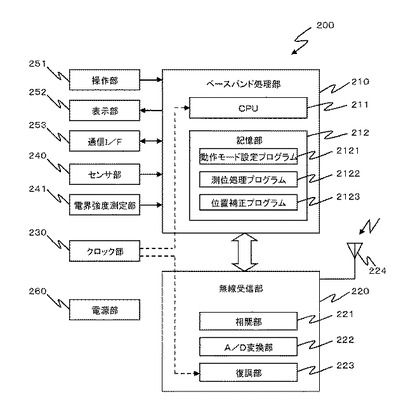
図5に通信端末200のブロック図を示している。同図に示すように、通信端末200
は、ベースバンド処理部210、無線受信部220、クロック部230、センサ部240
、電界強度測定部241、操作部251、表示部252、通信I/F253、及び電源部
260を備えている。通信端末200は、例えばGPS受信装置やGPSが搭載された携
帯電話機である。
【0031】
ベースバンド処理部210は、CPU211、及び記憶部212を含む。CPU211
は、記憶部212に格納されているプログラムを実行することにより通信端末200の様
々な機能を実現する。
【0032】
記憶部212は、例えばRAM(Random Access Memory、ROM(Read Only Memory)、フラッシュメモリ等の不揮発性メモリ等である。記憶部212には、通信端末200の動作モードを設定する機能(以下、動作モード設定部と称する。)を実現するプログラムである動作モード設定プログラム2121、自機の現在位置の取得(測位)に関する機能(以下、測位処理部と称する。)を実現するプログラムである測位処理プログラム2122、センサ情報等による位置補正に関する機能(以下、位置補正部と称する。)を実現するプログラムである位置補正プログラム2123が格納されている。
【0033】
無線受信部220は、相関部221、A/D変換部222、復調部223、及びアンテ
ナ224を含む。
このうち復調部223は、クロック部230から入力されるクロック信号によって、ア
ンテナ224で受信したアナログ信号を復調(BPSK復調)した信号(以下、受信信号
と称する。)を生成し、生成した受信信号をA/D変換部222に入力する。
A/D変換部222は、復調部223から入力される受信信号をデジタル信号に変換す
る。
【0034】
相関部221は、並列動作可能(異なるC/Aコードに対応する複数のチャンネルを同
時にトラッキング可能)な複数の相関器2211を含む。各相関器2211には夫々が復
調するC/Aコードをそれぞれ独立して設定することができる。各相関器2211は、A
/D変換器222から入力されるデジタル信号に含まれるC/Aコードをレプリカパター
ン(通信端末200が独自に記憶又は生成するC/Aコード)と比較し、デジタル信号に
含まれるC/Aコードを復調した信号をベースバンド処理部210に入力する。
【0035】
クロック部230は、CPU211を動作させるためのクロック信号、復調部223の
復調に必要なクロック信号(例えば1.024MHz)を生成する。クロック部130は
、例えばTCXO(温度保証型水晶発振器)やOCXO(恒温槽型水晶発振器)等の発振
器を含む。
【0036】
操作部251は、通信端末200に対して操作入力を行うためのユーザインタフェース
であり、操作ボタンや操作ダイヤル等である。
表示部252は、各種の情報を表示するインタフェースであり、液晶モニタや有機EL
パネル等である。
【0037】
通信I/F253は、位置情報送信機100を外部装置に接続するための通信インタフ
ェースである。例えばRS−232C、UART(Universal Asynchronous Receiver Tr
ansmitter)、オープンコレクタ(Open Collector)、TTL(Transistor-Transistor L
ogic)、パラレルI/F、USB(Universal Serial Bus)等である。
【0038】
センサ部240は、気圧センサや照度センサ等の自身の現在の周囲環境を示す情報(現
在位置環境情報)を取得するセンサを含む。電界強度測定部241は、例えばRSSI回
路によって構成され、受信した無線信号の電界強度を示す信号をベースバンド処理部21
0に入力する。
電源部260は、通信端末200の各部に駆動電力を供給する。
【0039】
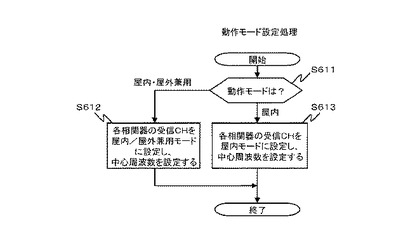
図6は動作モード設定部によって行われる処理(動作モード設定処理)を説明するフロ
ーチャートである。尚、同図に示す処理は、例えば通信端末200の電源が投入された際
やユーザが所定の設定操作を行った際に自動的にもしくは手動により開始される。
【0040】
まず動作モード設定部は、通信端末200に現在設定されている動作モードを取得する
。ベースバンド処理部210の記憶部212には、通信端末200に現在設定されている
動作モードを示す情報が格納されており、動作モード設定部はこの情報を取得する(S6
11)。
【0041】
次に動作モード設定部は、取得した動作モードに応じて相関部221の各相関器が補足
する無線信号(衛星測位信号又は位置情報信号)のチャンネル(各相関器が復調するC/
Aコード)と中心周波数を設定する(S612、S613)。中心周波数は例えばL1信
号の場合は1575.42MHzである。尚、必ずしも完全にこの周波数に一致するわけ
ではなく、少しずれた周波数に設定される場合もある。
【0042】
図7は相関器が5個である場合における各相関器の設定例である。同図に示すように、
動作モードが「屋内・屋外兼用」に設定されていた場合(S611:屋内・屋外兼用)、
動作モード設定部は4個の相関器(1〜4)を衛星測位信号のチャンネル(8ch、11
ch、15ch、20ch)に設定し、他の1個の相関器(5)を位置情報信号のチャン
ネル(180ch)に設定する。
【0043】
また動作モードが「屋内」に設定されていた場合(S611:屋内)、動作モード設定
部は1個の相関器(1)のみを衛星測位信号のチャンネル(8ch)に設定し、他の4個
の相関器(2〜5)を位置情報信号のチャンネル(174ch、175ch、179ch
、180ch)に設定する。
【0044】
ここでいずれの動作モードにおいても少なくとも1個の相関器(同図では相関器(5)
)については特定の位置情報信号のチャンネル(180ch)に設定される。これは後述
するように、通信端末200が、境界フラグが「1」に設定されている位置関係情報を受
信した場合に自動的に動作モードの設定を行うためである。
【0045】
尚、以上では相関部221が5個の相関器を備えている場合を例として説明したが、相
関部221が備えている相関器の数はこれに限られない。例えば相関部221が16個の
相関器を有している場合には、動作モードが「屋外・屋内兼用」である場合は14個の相
関器を衛星測位信号のチャンネルに、他の2個を位置情報信号のチャンネルに設定する。
また動作モードが「屋内」である場合は2個の相関器を衛星測位信号のチャンネルに、他
の14個を位置情報信号のチャンネルに設定する。
【0046】
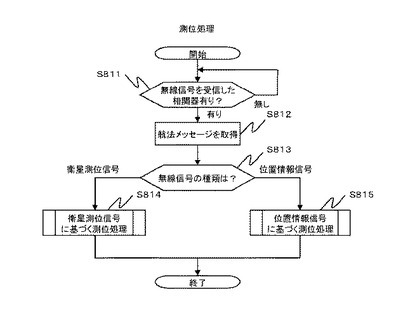
図8は測位処理部によって行われる自機の現在位置を取得する処理(測位処理)を説明
するフローチャートである。
【0047】
測位処理部は、無線受信部220から入力される信号に基づき、無線信号(衛星測位信
号又は位置情報信号)を受信した相関器が存在するか否かをリアルタイムに監視しており
(S811)、無線信号を受信した相関器があると(S811:YES)、その相関器が
受信した無線信号に含まれる航法メッセージを取得する(S812)。
【0048】
次に測位処理部は、無線信号を受信した相関器に設定されているチャンネルが、人工衛
星のチャンネルか、又は位置情報送信機のチャンネルかを調べることにより、受信した無
線信号が衛星測位信号か位置情報信号かを判断する(S813)。衛星測位信号である場
合には(S813:衛星測位信号)、測位処理部は衛星測位信号に基づく測位処理(S8
14)を実行する。一方、受信した無線信号が位置情報信号である場合には(S813:
位置情報信号)、測位処理部は位置情報信号に基づく測位処理(S815)を実行する。
【0049】
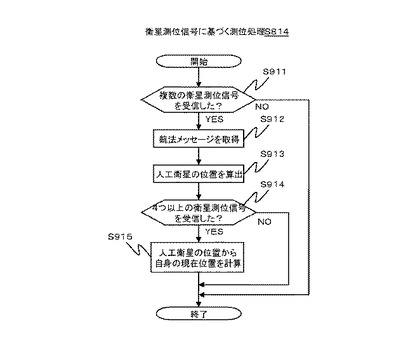
図9は衛星測位信号に基づく測位処理(S814)を説明するフローチャートである。
【0050】
同図に示すように、測位処理部は、まず複数の衛星測位信号を受信したか否かを判断し
(S911)、複数の衛星測位信号を受信している場合には(S911:YES)、受信
した各衛星測位信号から航法メッセージを取得する(S912)。一方、測位処理部は、
複数の衛星測位信号を受信していないと判断した場合には(S911:NO)、処理を終
了する。
【0051】
次に測位処理部は、S912で取得した各衛星測位信号の航法メッセージに基づいて、
各人工衛星の位置を求める(S913)。即ち測位処理部は、各人工衛星からの電波の伝
搬時間に基づき通信端末200から各人工衛星までの距離(疑似距離)を求め、航法メッ
セージに含まれている精密軌道情報(エフェメリス)から人工衛星の座標を算出する。
【0052】
次に測位処理部は、4つ以上の人工衛星からの衛星測位信号を受信したか否かを判断す
る(S914)。4つ以上の人工衛星からの衛星測位信号を受信している場合には(S9
14:YES)、測位処理部は、S913で求めた各人工衛星の位置から自身の現在位置
(緯度、経度、高さ)を算出する(S915)。一方、4つ以上の人工衛星からの衛星測
位信号を受信していない場合には(S914:NO)、処理を終了する。
【0053】
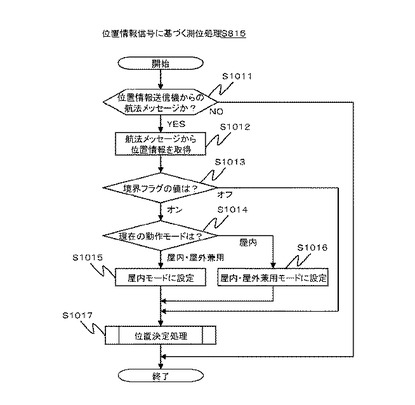
図10は位置情報信号に基づく測位処理(S815)を説明するフローチャートである
。
【0054】
同図に示すように、測位処理部は、まずS812で取得した航法メッセージが位置情報
送信機100から送信されたものであるか否かを判断する(S1011)。取得した航法
メッセージが位置情報送信機100から送信されたものであると判断した場合には(S1
011:YES)、S1012に進み、位置情報送信機100から送信されたものではな
いと判断した場合には(S1011:NO)処理を終了する。
尚、航法メッセージが位置情報送信機100から送信されたものであるか否かの判断は
、例えば航法メッセージ(又は位置情報信号)に、それが位置情報送信機100から送信
されたものであることを示す情報が含まれているか否かを調べることにより行う。
【0055】
次のS1012では、測位処理部は、航法メッセージから位置情報(境界フラグ311
,設置高さ312、設置位置(緯度313、経度314)、センサ情報315等)を取得
する。
次に測位処理部は、位置情報の境界フラグ311の内容を調べる(S1013)。境界
フラグが「1:オン」であった場合には(S1013:オン)、S1014に進む。境界
フラグが「0:オフ」であった場合には(S1013:オフ)、S1017に進む。
【0056】
S1014において、測位処理部は、通信端末200に設定されている現在の動作モー
ドを調べる(S1014)。そして現在の動作モードが「屋内・屋外兼用モード」に設定
されていた場合(S1014:屋内・屋外兼用)、測位処理部は通信端末200の動作モ
ードを「屋内モード」に設定する(S1015)。一方、現在の動作モードが「屋内モー
ド」に設定されていた場合(S1014:屋内)、測位処理部は通信端末200の動作モ
ードを「屋内・屋外兼用モード」に設定する(S1016)。
【0057】
尚、S1014において、現在の動作モードが「屋内・屋外兼用モード」になっている
場合とは、例えば、図1において建物3の外にいた通信端末200のユーザが建物3の出
入口31に近づいて位置情報送信機100(1)の位置情報信号を受信した場合である。
【0058】
また、S1014において、現在の動作モードが「屋内モード」になっている場合とは
、例えば、図1において通信端末200のユーザが建物3の出入口31を通過して建物3
の中に入ったことにより、出入口31を通過した際に境界フラグが「1:オン」に設定さ
れている位置情報信号を送信する位置情報送信機100(1)からの位置情報信号を受信
してS1016で動作モードが「屋内モード」に設定され、その後、再び建物3の外に出
るためにユーザが出入口31に近づき、位置情報送信機100(1)の位置情報信号を受
信した場合である。
【0059】
このように、電源投入時等において初期設定されている通信端末200の動作モードは
、境界フラグが「1:オン」に設定されている位置情報送信機100からの位置情報信号
を通信端末200が受信することにより、自動的に通信端末200が自身の現在位置を取
得するのに好適な動作モードに設定される。このため、例えば通信端末200が屋内にあ
る場合は位置情報信号を受信する相関器の割合を増やし、逆に屋外にある場合は衛星測位
信号を受信する相関器の割合を増やすといった設定を自動的に行うことが可能となる。そ
してこのように動作モードの設定が適切に行われることにより通信端末200が自身の現
在位置を特定できない期間が少なくなって、通信端末200は、安定して確実に自身の現
在位置を取得することができるようになる。
【0060】
図10のS1017では、測位処理部は、次の位置決定処理(S1017)を行う。図
11は位置決定処理(S1017)を説明するフローチャートである。
【0061】
位置決定処理(S1017)において、まず測位処理部は、複数の位置情報信号を受信
しているか否かを判断する(S1117)。携帯端末200が複数の位置情報信号を受信
している場合とは、例えば、複数の位置情報送信機100の設置位置の中間位置付近にい
る場合や、現在通信端末200がある部屋に設けられている位置情報送信機100からの
位置情報信号とともに、他の部屋に設けられている位置情報送信機100からの位置情報
信号(壁、床、窓等を透過して届く位置情報信号)を受信してしまっている場合である。
【0062】
S1117において、携帯端末200が複数の位置情報信号を受信していると判断した
場合には(S1117:YES)、S1118に進む。一方、複数の位置情報信号を受信
していないと判断した場合には(S1117:NO)、S1119に進む。
【0063】
S1118では、測位処理部は、受信した複数の位置情報信号の中から、自身の現在位
置を求めるのに選択すべき位置情報信号を決定する。
【0064】
ここで測位処理部は、例えば電界強度測定部241から取得される各位置情報信号の夫
々の電界強度を比較して、電界強度の最も強い位置情報信号を選択する。
また例えば、測位処理部は、センサ部240から取得される気圧や照度等の値と位置情
報信号に含まれている位置情報のセンサ情報の値とを比較し、両者の類似度の最も高い位
置情報信号を選択する。
また例えば、測位処理部は、位置情報のセンサ情報315の気圧と自身がセンサ部24
0から取得した気圧との差が最も小さい位置情報信号を選択する。
また例えば、測位処理部は、位置情報のセンサ情報315の照度と自身がセンサ部24
0から取得した照度との差が最も小さい位置情報信号を選択する。
また例えば、測位処理部は、気圧や照度などに所定の重み付けをして求めた総合的な相
関値に基づいて、いずれの位置情報信号を選択するかを決定する。
【0065】
尚、このように、測位処理部は、通信端末200と位置情報送信機100の夫々で測定
した値を比較した結果に基づいて、つまり両者の相対的な関係に基づき選択すべき位置情
報信号を決定するので、大気圧の変化や日照の変化による照度の変化等の環境変化に影響
されることなく、選択すべき位置情報信号を適切に決定することができる。
【0066】
S1119において、測位処理部は、受信した位置情報信号(複数の位置情報信号を受
信している場合はS1118で決定した位置情報信号)に含まれている位置情報に基づき
自身の現在位置を求める。例えば測位処理部は、位置情報の設置高さ312、設置位置(
緯度313、経度314)を自身の現在位置とする。
【0067】
また例えば測位処理部は、位置情報の設置高さ312、設置位置(緯度313、経度3
14)を、位置情報のセンサ情報315とセンサ部240から取得される値とによって補
正した値を自身の現在位置とする。
【0068】
具体的には、例えば両者の気圧に差がある場合、気圧と高度の関係式(又は気圧と高度
の関係を示すテーブル)に基づき位置情報から取得した設置高さ312を補正する。また
例えば両者の照度に差がある場合には、照度と位置(緯度、経度)の関係を示すテーブル
(又は関係式)に基づき位置情報から取得した設置位置(緯度313、経度314)を補
正する。
【0069】
このように、測位処理部は、受信した位置情報から取得したセンサ情報315と、自身
のセンサ部240から取得される値とを比較することにより、位置情報から取得される設
置高さ312、設置位置(緯度313、経度314)を自動的に補正し、補正後の値を自
身の現在位置として取得する。このため、通信端末200は、自身の現在位置として正確
な値を取得することができる。
【0070】
また通信端末200が携帯電話機である場合等、位置情報送信機100の設置高さと通
信端末200の高さ(ユーザが通信端末200を携帯している高さ)があらかじめ知れて
いる場合には、測位処理部は、その差分を位置情報から取得される設置高さ312、設置
位置(緯度313、経度314)に加算又は減算することにより、位置情報の設置高さ3
12を補正する。
【0071】
ところで、図6では動作モードが2つ(屋内・屋外兼用、及び屋内)の場合について説
明したが、動作モードの数は必ずしも2つに限られない。例えば図12に示すように、動
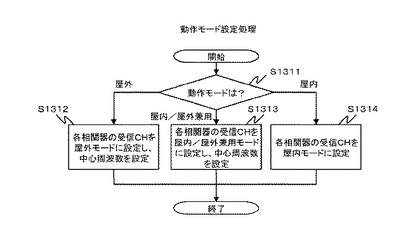
作モードを3つ(屋外、屋内・屋外兼用、屋内)とすることもできる。図13は図6の動
作モード設定処理の変形例であり、動作モードが3つである場合における動作モード設定
処理を説明するフローチャートである。
【0072】
図13のS1311において、動作モード設定部は、通信端末200に現在設定されて
いる動作モードを取得する。次に動作モード設定部は、取得した動作モードに応じて相関
部221の各相関器が補足する無線信号(衛星測位信号又は位置情報信号)のチャンネル
及び中心周波数を設定する(S1312、S1313、S1314)。
【0073】
ここで図12に示すように、動作モードが「屋外」に設定されていた場合には(S12
11:屋外)、動作モード設定部は4個の相関器(1〜4)を衛星測位信号のチャンネル
(8ch、11ch、15ch、20ch)に設定し、他の1個の相関器(5)を位置情
報信号のチャンネル(180ch)に設定する。
【0074】
また動作モードが「屋内・屋外兼用」に設定されていた場合には(S1211:屋内・
屋外兼用)、動作モード設定部は2個の相関器(1〜2)を衛星測位信号のチャンネル(
8ch、11ch)に設定し、他の3個の相関器(3〜5)を位置情報信号のチャンネル
(175ch、179ch、180ch)に設定する。
【0075】
また動作モードが「屋内」に設定されていた場合には(S1211:屋内)、動作モー
ド設定部は1個の相関器(1)のみを衛星測位信号のチャンネル(8ch)に設定し、他
の4個の相関器(2〜5)を位置情報信号のチャンネル(174ch、175ch、17
9ch、180ch)に設定する。
【0076】
ここで図6におけるのと同様に、いずれの動作モードにおいても、少なくとも一つの相
関器(同図では相関器(5))は位置情報送信機100に付与されている特定のチャンネ
ル(180ch)を受信するように設定される。
【0077】
尚、動作モードが3つである場合においても、図6の場合と同様に相関器の数は5つに
限定されない。例えば相関部221が16個の相関器を有している場合には、動作モード
が「屋外」である場合は14個の相関器を衛星測位信号のチャンネルに設定し、他の2個
を位置情報信号のチャンネルに設定する。また動作モードが「屋外・屋内兼用」である場
合は7個の相関器を衛星測位信号のチャンネルに設定し、他の9個を位置情報信号のチャ
ンネルに設定する。また動作モードが「屋内」である場合は2個の相関器を衛星測位信号
のチャンネルに設定し、他の14個を位置情報信号のチャンネルに設定する。
【0078】
尚、動作モードが「屋外」に設定されている通信端末200が、境界フラグ311が「
1」に設定されている位置情報送信機100(例えば図1の位置情報送信機100(1)
)からの位置情報信号を受信した場合に、通信端末200が自動的に自身の動作モードを
「屋内・屋外兼用」又は「屋内」に切り替えるようにしてもよい。
【0079】
また動作モードが「屋内」又は「屋内・屋外兼用」に設定されている通信端末200が
、境界フラグが「1」に設定されている位置情報送信機100(1)からの位置情報信号
を受信した場合に、通信端末200が自動的に自身の動作モードを「屋内」又は「屋内・
屋外兼用」から「屋外」に切り替えるようにしてもよい。
【0080】
また動作モードが「屋内・屋外兼用」に設定されている通信端末200が、境界フラグ
が「1」に設定されている位置情報送信機100(1)以外の位置情報送信機(2〜5)
からの位置情報信号を受信した場合に、通信端末200が自動的に自身の動作モードを「
屋内・屋外兼用」から「屋内」に切り替えるようにしてもよい。
【0081】
また動作モードが「屋内」又は「屋内・屋外兼用」に設定されている通信端末200が
、境界フラグが「1」に設定されている位置情報送信機100(1)以外の位置情報送信
機(2〜5)からの位置情報信号を所定時間以上受信できなくなった場合に、通信端末2
00が自動的に自身の動作モードを「屋内」又は「屋内・屋外兼用」から「屋外」に切り
替えるようにしてもよい。
【0082】
また動作モードが「屋内・屋外兼用」又は「屋内」に設定されている通信端末200が
、人工衛星2からの衛星測位信号を受信した場合に、通信端末200が自動的に自身の動
作モードを「屋内」又は「屋内・屋外兼用」から「屋外」に切り替えるようにしてもよい
(衛星測位信号を優先する設定)。
【0083】
ところで、以上の実施形態の説明は本発明の理解を容易にするためのものであり、本発
明を限定するものではない。本発明はその趣旨を逸脱することなく、変更、改良され得る
と共に、本発明にはその等価物が含まれることは勿論である。
【0084】
例えば、以上の説明では通信端末200が、自身の各相関器に異なるチャンネルを割り
当てるようにしているが、自身の複数の相関器の夫々が同じチャンネルの位置情報信号を
受信するように設定し、同じチャンネルの位置情報信号を受信するように設定された各相
関器が、設定されているチャンネルについてのサーチすべき周波数範囲における異なる周
波数範囲をサーチするようにしてもよい。
【0085】
具体的には、例えば、設定されているチャンネルのサーチすべき周波数範囲が周波数f
1〜f3である場合には、第1の相関器が周波数f1〜f2(f1<f2<f3)をサー
チするように設定し、第2の相関器が周波数f2〜f3をサーチするように設定する。
【0086】
このようにすれば、当該チャンネルのサーチが複数の相関器により分担して同時並行的
に行われ、個々の相関器がサーチすべき周波数範囲が狭くなるのでサーチ時間が短縮され
る。その結果、通信端末200が自身の現在位置を取得するのに要する時間が短縮される
こととなる。尚、第1の相関器がサーチする周波数範囲と第2の相関器がサーチする周波
数範囲とは、重複する範囲がなるべく少なくなるように設定することが好ましい。
【0087】
また例えば、周辺他機チャンネル317に設定されているチャンネルを設定した位置情
報を含んだ位置情報信号を送信し、通信端末200が、位置情報の周辺他機チャンネル3
17に設定されているチャンネルを受信するように自身の相関器を自動的に設定するよう
にしてもよい。このようにすれば、例えば通信端末200が移動した際、移動先に存在す
る位置情報送信機100から送信される位置情報信号のサーチに要する時間が短縮され、
その結果、通信端末200が自身の現在位置を取得するのに要する時間が短縮される。
【0088】
尚、以上では、センサとして気圧センサ及び照度センサを例示しているが、センサの種
類はこれらに限られない。例えば、温度センサや湿度センサであってもよい。また人工衛
星2や位置情報送信機100から送信される無線信号の種類は電波に限られない。例えば
無線信号は光や赤外線等を利用するものであってもよい。
【符号の説明】
【0089】
2 人工衛星
3 建物
31 出入口
100 位置情報送信機
110 デジタル処理部
111 CPU
112 記憶部
1121 位置情報送信プログラム
1122 位置情報データベース
120 無線送信部
121 D/A変換部
122 搬送波生成部
123 変調部
130 クロック部
140 センサ部
200 通信端末
210 ベースバンド処理部
211 CPU
212 記憶部
2121 動作モード設定プログラム
2122 測位処理プログラム
2123 位置補正プログラム
220 無線受信部
221 相関部
223 復調部
240 センサ部
241 電界強度測定部
311 境界フラグ
312 設置高さ
313 緯度
314 経度
315 センサ情報
316 自機チャンネル
317 周辺他機チャンネル
【技術分野】
【0001】
本発明は、測位システム、位置情報送信機、通信端末、及び測位システムの制御方法に
関し、とくに安定して確実に通信端末の現在位置を取得できるようにする技術に関する。
【背景技術】
【0002】
GPS衛星等の人工衛星から送信されてくる無線信号(以下、衛星測位信号と称する。
)を利用して測位を行うシステムは、屋内やビル街地下街等の衛星測位信号を受信できな
いエリアにGPS受信機等の通信端末が入ってしまうと測位精度が低下し、もしくは測位
不能になってしまうという問題がある。
【0003】
そこで例えば特許文献1には、屋内や地下街等の衛星測位信号を受信できないエリアに
位置を示す信号である位置情報信号を送信する装置を設け、通信端末が位置情報信号を受
信することにより自身の現在位置を取得する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−278756号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、上記技術のような衛星測位信号による測位と位置情報信号による測位が可能
な通信端末が安定して確実に通信端末の現在位置を取得できるようにするには、衛星測位
信号と位置情報信号のいずれを受信すべきか適切に判断して通信端末の動作状態を設定す
る仕組みが必要である。
【0006】
本発明はこのような背景に基づいてなされたものであり、安定して確実に通信端末の現
在位置を取得することが可能な測位システム、位置情報送信機、通信端末、及び測位シス
テムの制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成する本発明のうちの一つは、測位システムであって、
位置を示す情報である位置情報を含んだ無線信号である位置情報信号を、人工衛星から
送信される測位のための無線信号である衛星測位信号と互換性を有する信号として送信す
る送信部を有する位置情報送信機と、
前記衛星測位信号を受信すると当該衛星測位信号から人工衛星の位置を求めることによ
り自身の現在位置を求め、前記位置情報信号を受信すると当該位置情報信号に含まれる前
記位置情報に基づき自身の現在位置を求める測位処理部、及び
夫々が前記無線信号を独立して受信可能な複数の相関器
を有する通信端末と、
を含み、
前記送信部が、前記相関器の夫々を前記衛星測位信号又は前記位置情報信号のいずれを
受信するように設定するかを決定するために用いる情報である動作モード決定情報を含む
前記位置情報信号を送信し、
前記通信端末が、受信した前記位置情報信号に含まれている前記動作モード決定情報に
基づき前記相関器が前記衛星測位信号又は前記位置情報信号のいずれを受信するのかを設
定する動作モード設定部を有することとする。
【発明の効果】
【0008】
本発明によれば、安定して確実に通信端末の現在位置を取得することができる。
【図面の簡単な説明】
【0009】
【図1】測位システム1の概略的な構成を示す図である。
【図2】位置情報送信機100のブロック図である。
【図3】位置情報データベース1122の一例である。
【図4】位置情報送信機100によって行われる位置情報信号の送信処理を説明するフローチャートである。
【図5】通信端末200のブロック図である。
【図6】動作モード設定処理を説明するフローチャートである。
【図7】各動作モードにおける相関器の設定例である。
【図8】測位処理を説明するフローチャートである。
【図9】衛星測位信号に基づく測位処理(S814)を説明するフローチャートである。
【図10】位置情報信号に基づく測位処理(S815)を説明するフローチャートである。
【図11】位置決定処理(S1017)を説明するフローチャートである。
【図12】各動作モードにおける相関器の設定例である。
【図13】動作モード設定処理を説明するフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態につき図面とともに説明する。図1に本発明の実施形態として
説明する測位システム1の概略的な構成を示している。同図に示すように、測位システム
1は、測位のための無線信号(以下、衛星測位信号と称する。)を送信する複数の人工衛
星2、位置を示す情報を含んだ無線信号(以下、位置情報信号と称する。)を送信する複
数の位置情報送信機100、及び人工衛星2又は位置情報送信機100からの無線信号に
基づき自身の現在位置を取得する機能を有する通信端末200を含む。
【0011】
人工衛星2は、例えばGPS(Global Positioning System)、ガリレオ測位システム(Galileo positioning system)、GLONASS(Global Navigation Satellite System)、準天頂衛星(Quazi-Zenith Satellites)システム等の測位システムにおける人工衛星である。尚、以下の説明では人工衛星2はGPS衛星であるものとし、人工衛星2から送信される衛星測位信号、即ちGPS信号は、例えばL1信号(1575.42MHz)やL2信号(1227.6MHz)であるものとする。
【0012】
人工衛星2から送られてくる衛星測位信号にはいわゆる航法メッセージが含まれている
。航法メッセージは、例えば全体で25個のフレームを含み、各フレームは5個のサブフ
レームを含み、サブフレームは300ビットで構成される。各サブフレームは、例えば衛
星時計の補正情報、精密軌道情報(エフェメリス)、概略軌道情報(アルマナック)、電
離層補正情報、UTC補正情報、人工衛星の健康情報等を含む。
【0013】
人工衛星2から送られてくる衛星測位信号は、人工衛星2ごとに固有に付与された疑似ランダム符号(PRN番号(Pseudo Random Noise Code))であるC/Aコード(Coarse/Acquisition code)によってBPSK(Bi Phase Shift Keying)変調されている。
【0014】
位置情報送信機100から送信される位置情報信号は、人工衛星2から送信される衛星
測位信号と互換性を有しており、衛星測位信号と同様の変調方式及び同様のフレーム構成
の無線信号として送信される。各位置情報送信機100にもC/Aコードが付与されてお
り、位置情報信号は、送信される位置情報送信機100のC/AコードによってBPSK
変調されている。
【0015】
図2に位置情報送信機100のブロック図を示す。同図に示すように、位置情報送信機
100は、デジタル処理部110、無線送信部120、クロック部130、センサ部14
0、操作部151、表示部152、通信I/F153、及び電源部160を備えている。
【0016】
このうちデジタル処理部110は、CPU111、記憶部112(例えばRAM(Random Access Memory、ROM(Read Only Memory)、フラッシュメモリ等の不揮発性メモリ等の記憶装置)を含む。
【0017】
CPU111は、記憶部112に格納されているプログラムを実行することにより位置
情報送信機100が提供する様々な機能を実現する。記憶部112には、位置情報信号の
送信に関する機能(以下、位置情報送信部と称する。)を実現するプログラムである位置
情報送信プログラム1121、及び当該位置情報送信機100が設置されている位置(緯
度、経度、高度等)を示すデータが登録された位置情報データベース1122が格納され
ている。
【0018】
位置情報送信プログラム1121によって実現される位置情報送信部は、航法メッセー
ジ等の、位置情報送信機100から送信する位置情報信号に含ませるデータを自機のPR
N番号(C/Aコード)によってスペクトラム拡散したデジタル信号(ビットストリーム
)を生成し、生成したデジタル信号を無線送信部120に入力する。
【0019】
無線送信部120は、D/A変換部121、搬送波生成部122、変調部123、及び
アンテナ124を含む。
D/A変換部121は、デジタル処理部110から入力されるデジタル信号をアナログ
信号に変換する。
搬送波生成部122は、クロック部130から入力されるクロック信号に基づき位置情
報信号の搬送波を生成する。
変調部123は、D/A変換部121から入力されるアナログ信号により、搬送波生成
部122から入力される搬送波(位置情報信号がL1信号であれば1575.42MHz
)によって変調(BPSK変調)し、変調信号をアンテナ124に入力する。
【0020】
クロック部130は、CPU111を動作させるためのクロック信号や搬送波を生成す
るためのクロック信号(例えば1.023MHz)を生成する。クロック部130は、例えばTCXO(温度保証型水晶発振器)やOCXO(恒温槽型水晶発振器)等の発振器を含む。
【0021】
操作部151は、位置情報送信機100に対して操作入力を行うためのユーザインタフ
ェースであり、例えば操作ボタンやスイッチである。
表示部152は、位置情報送信機100に対して操作入力がされる際や位置情報送信機
100の動作状態の確認時に様々な情報を表示するインタフェースである。表示部152
は、例えば液晶モニタやLED(Light Emitting Diode)である。
【0022】
通信I/F153は、位置情報送信機100をコンピュータ(情報処理装置)等の外部
の装置に接続するための通信インタフェースである。通信I/F153は、例えばRS−232C、UART(Universal Asynchronous Receiver Transmitter)、オープンコレクタ(Open Collector)、TTL(Transistor-Transistor Logic)、パラレルI/F、USB(Universal Serial Bus)である。位置情報データベース1122へのデータの登録時や保守時等は、通信I/F153を介して位置情報送信機100にコンピュータが接続される。
【0023】
センサ部140は、気圧センサや照度センサ等の自身の現在の周囲環境を示す情報(設
置位置環境情報)を取得するセンサを含む。尚、後述するように、センサ部140から出
力される情報は、通信端末200が複数の位置情報信号を受信した場合における位置情報
信号の選択や、自身が現在位置を求める際の補正に用いられる。
電源部160は、位置情報送信機100の各部に駆動電力を供給する。
【0024】
図3に位置情報データベース1122の一例を示す。位置情報データベース1122に
は、境界フラグ311、高さ312、位置情報送信機100の設置位置(緯度313、経
度314)、センサ情報315、自機チャンネル316、周辺他機チャンネル317等が
登録されている。以下、位置情報データベース1122に登録されている情報のことを位
置情報と称する。
【0025】
位置情報データベース1122に登録されている情報のうち、境界フラグ311には、
「1:オン」又は「0:オフ」が設定される。境界フラグ311は、通信端末200が、
自身の相関器の夫々を衛星測位信号又は位置情報信号のいずれを受信するのか(動作モー
ド)を設定するために用いられる情報(動作モード設定情報)である。境界フラグ311
の値は、例えば図1における建物3の出入口31付近に設けられた位置情報送信機100
(1)については「1:オン」に設定され、建物3内の他の位置情報送信機100(2)
〜(5)の境界フラグ311については「0:オフ」に設定される。
【0026】
センサ情報315には、センサ部140の各種センサによって検出されたリアルタイム
な検出値が設定される。
自機チャンネル316には、当該位置情報送信機100が送信する位置情報信号の送信
チャンネル(自機のC/Aコードに対応)を示す情報が設定される。
周辺他機チャンネル317には、その位置情報送信機100の周辺に設置されている他
の位置情報送信機100の位置情報信号の送信チャンネル(他機のC/Aコードに対応)
を示す情報が設定される。
【0027】
図4は位置情報送信機100によって行われる位置情報信号の送信処理を説明するフロ
ーチャートである。尚、以下の説明において、符号の前に付した「S」の文字はステップ
を意味する。
【0028】
位置情報信号の送信に際し、位置情報送信機100のデジタル処理部110は、先ず位
置情報データベース1122から位置情報信号に含ませる位置情報を取得する(S411
)。次にデジタル処理部110は、取得した位置情報を含んだ航法メッセージを生成し(
S412)、生成した航法メッセージをサブフレームに格納する(S413)。
【0029】
次にデジタル処理部110は、サブフレームに格納した航法メッセージを自機のC/A
コードでスペクトラム拡散したデジタル信号(ビットストリーム)を生成し(S414)
、生成したデジタル信号を無線送信部120に入力する(S415)。無線送信部120
は、入力されるデジタル信号によって搬送波を変調し、アンテナ124から位置情報信号
を送信する(S416)。尚、位置情報送信機100は、以上のようにして生成された位
置情報信号を所定のタイミングで繰り返し送信する。
【0030】
図5に通信端末200のブロック図を示している。同図に示すように、通信端末200
は、ベースバンド処理部210、無線受信部220、クロック部230、センサ部240
、電界強度測定部241、操作部251、表示部252、通信I/F253、及び電源部
260を備えている。通信端末200は、例えばGPS受信装置やGPSが搭載された携
帯電話機である。
【0031】
ベースバンド処理部210は、CPU211、及び記憶部212を含む。CPU211
は、記憶部212に格納されているプログラムを実行することにより通信端末200の様
々な機能を実現する。
【0032】
記憶部212は、例えばRAM(Random Access Memory、ROM(Read Only Memory)、フラッシュメモリ等の不揮発性メモリ等である。記憶部212には、通信端末200の動作モードを設定する機能(以下、動作モード設定部と称する。)を実現するプログラムである動作モード設定プログラム2121、自機の現在位置の取得(測位)に関する機能(以下、測位処理部と称する。)を実現するプログラムである測位処理プログラム2122、センサ情報等による位置補正に関する機能(以下、位置補正部と称する。)を実現するプログラムである位置補正プログラム2123が格納されている。
【0033】
無線受信部220は、相関部221、A/D変換部222、復調部223、及びアンテ
ナ224を含む。
このうち復調部223は、クロック部230から入力されるクロック信号によって、ア
ンテナ224で受信したアナログ信号を復調(BPSK復調)した信号(以下、受信信号
と称する。)を生成し、生成した受信信号をA/D変換部222に入力する。
A/D変換部222は、復調部223から入力される受信信号をデジタル信号に変換す
る。
【0034】
相関部221は、並列動作可能(異なるC/Aコードに対応する複数のチャンネルを同
時にトラッキング可能)な複数の相関器2211を含む。各相関器2211には夫々が復
調するC/Aコードをそれぞれ独立して設定することができる。各相関器2211は、A
/D変換器222から入力されるデジタル信号に含まれるC/Aコードをレプリカパター
ン(通信端末200が独自に記憶又は生成するC/Aコード)と比較し、デジタル信号に
含まれるC/Aコードを復調した信号をベースバンド処理部210に入力する。
【0035】
クロック部230は、CPU211を動作させるためのクロック信号、復調部223の
復調に必要なクロック信号(例えば1.024MHz)を生成する。クロック部130は
、例えばTCXO(温度保証型水晶発振器)やOCXO(恒温槽型水晶発振器)等の発振
器を含む。
【0036】
操作部251は、通信端末200に対して操作入力を行うためのユーザインタフェース
であり、操作ボタンや操作ダイヤル等である。
表示部252は、各種の情報を表示するインタフェースであり、液晶モニタや有機EL
パネル等である。
【0037】
通信I/F253は、位置情報送信機100を外部装置に接続するための通信インタフ
ェースである。例えばRS−232C、UART(Universal Asynchronous Receiver Tr
ansmitter)、オープンコレクタ(Open Collector)、TTL(Transistor-Transistor L
ogic)、パラレルI/F、USB(Universal Serial Bus)等である。
【0038】
センサ部240は、気圧センサや照度センサ等の自身の現在の周囲環境を示す情報(現
在位置環境情報)を取得するセンサを含む。電界強度測定部241は、例えばRSSI回
路によって構成され、受信した無線信号の電界強度を示す信号をベースバンド処理部21
0に入力する。
電源部260は、通信端末200の各部に駆動電力を供給する。
【0039】
図6は動作モード設定部によって行われる処理(動作モード設定処理)を説明するフロ
ーチャートである。尚、同図に示す処理は、例えば通信端末200の電源が投入された際
やユーザが所定の設定操作を行った際に自動的にもしくは手動により開始される。
【0040】
まず動作モード設定部は、通信端末200に現在設定されている動作モードを取得する
。ベースバンド処理部210の記憶部212には、通信端末200に現在設定されている
動作モードを示す情報が格納されており、動作モード設定部はこの情報を取得する(S6
11)。
【0041】
次に動作モード設定部は、取得した動作モードに応じて相関部221の各相関器が補足
する無線信号(衛星測位信号又は位置情報信号)のチャンネル(各相関器が復調するC/
Aコード)と中心周波数を設定する(S612、S613)。中心周波数は例えばL1信
号の場合は1575.42MHzである。尚、必ずしも完全にこの周波数に一致するわけ
ではなく、少しずれた周波数に設定される場合もある。
【0042】
図7は相関器が5個である場合における各相関器の設定例である。同図に示すように、
動作モードが「屋内・屋外兼用」に設定されていた場合(S611:屋内・屋外兼用)、
動作モード設定部は4個の相関器(1〜4)を衛星測位信号のチャンネル(8ch、11
ch、15ch、20ch)に設定し、他の1個の相関器(5)を位置情報信号のチャン
ネル(180ch)に設定する。
【0043】
また動作モードが「屋内」に設定されていた場合(S611:屋内)、動作モード設定
部は1個の相関器(1)のみを衛星測位信号のチャンネル(8ch)に設定し、他の4個
の相関器(2〜5)を位置情報信号のチャンネル(174ch、175ch、179ch
、180ch)に設定する。
【0044】
ここでいずれの動作モードにおいても少なくとも1個の相関器(同図では相関器(5)
)については特定の位置情報信号のチャンネル(180ch)に設定される。これは後述
するように、通信端末200が、境界フラグが「1」に設定されている位置関係情報を受
信した場合に自動的に動作モードの設定を行うためである。
【0045】
尚、以上では相関部221が5個の相関器を備えている場合を例として説明したが、相
関部221が備えている相関器の数はこれに限られない。例えば相関部221が16個の
相関器を有している場合には、動作モードが「屋外・屋内兼用」である場合は14個の相
関器を衛星測位信号のチャンネルに、他の2個を位置情報信号のチャンネルに設定する。
また動作モードが「屋内」である場合は2個の相関器を衛星測位信号のチャンネルに、他
の14個を位置情報信号のチャンネルに設定する。
【0046】
図8は測位処理部によって行われる自機の現在位置を取得する処理(測位処理)を説明
するフローチャートである。
【0047】
測位処理部は、無線受信部220から入力される信号に基づき、無線信号(衛星測位信
号又は位置情報信号)を受信した相関器が存在するか否かをリアルタイムに監視しており
(S811)、無線信号を受信した相関器があると(S811:YES)、その相関器が
受信した無線信号に含まれる航法メッセージを取得する(S812)。
【0048】
次に測位処理部は、無線信号を受信した相関器に設定されているチャンネルが、人工衛
星のチャンネルか、又は位置情報送信機のチャンネルかを調べることにより、受信した無
線信号が衛星測位信号か位置情報信号かを判断する(S813)。衛星測位信号である場
合には(S813:衛星測位信号)、測位処理部は衛星測位信号に基づく測位処理(S8
14)を実行する。一方、受信した無線信号が位置情報信号である場合には(S813:
位置情報信号)、測位処理部は位置情報信号に基づく測位処理(S815)を実行する。
【0049】
図9は衛星測位信号に基づく測位処理(S814)を説明するフローチャートである。
【0050】
同図に示すように、測位処理部は、まず複数の衛星測位信号を受信したか否かを判断し
(S911)、複数の衛星測位信号を受信している場合には(S911:YES)、受信
した各衛星測位信号から航法メッセージを取得する(S912)。一方、測位処理部は、
複数の衛星測位信号を受信していないと判断した場合には(S911:NO)、処理を終
了する。
【0051】
次に測位処理部は、S912で取得した各衛星測位信号の航法メッセージに基づいて、
各人工衛星の位置を求める(S913)。即ち測位処理部は、各人工衛星からの電波の伝
搬時間に基づき通信端末200から各人工衛星までの距離(疑似距離)を求め、航法メッ
セージに含まれている精密軌道情報(エフェメリス)から人工衛星の座標を算出する。
【0052】
次に測位処理部は、4つ以上の人工衛星からの衛星測位信号を受信したか否かを判断す
る(S914)。4つ以上の人工衛星からの衛星測位信号を受信している場合には(S9
14:YES)、測位処理部は、S913で求めた各人工衛星の位置から自身の現在位置
(緯度、経度、高さ)を算出する(S915)。一方、4つ以上の人工衛星からの衛星測
位信号を受信していない場合には(S914:NO)、処理を終了する。
【0053】
図10は位置情報信号に基づく測位処理(S815)を説明するフローチャートである
。
【0054】
同図に示すように、測位処理部は、まずS812で取得した航法メッセージが位置情報
送信機100から送信されたものであるか否かを判断する(S1011)。取得した航法
メッセージが位置情報送信機100から送信されたものであると判断した場合には(S1
011:YES)、S1012に進み、位置情報送信機100から送信されたものではな
いと判断した場合には(S1011:NO)処理を終了する。
尚、航法メッセージが位置情報送信機100から送信されたものであるか否かの判断は
、例えば航法メッセージ(又は位置情報信号)に、それが位置情報送信機100から送信
されたものであることを示す情報が含まれているか否かを調べることにより行う。
【0055】
次のS1012では、測位処理部は、航法メッセージから位置情報(境界フラグ311
,設置高さ312、設置位置(緯度313、経度314)、センサ情報315等)を取得
する。
次に測位処理部は、位置情報の境界フラグ311の内容を調べる(S1013)。境界
フラグが「1:オン」であった場合には(S1013:オン)、S1014に進む。境界
フラグが「0:オフ」であった場合には(S1013:オフ)、S1017に進む。
【0056】
S1014において、測位処理部は、通信端末200に設定されている現在の動作モー
ドを調べる(S1014)。そして現在の動作モードが「屋内・屋外兼用モード」に設定
されていた場合(S1014:屋内・屋外兼用)、測位処理部は通信端末200の動作モ
ードを「屋内モード」に設定する(S1015)。一方、現在の動作モードが「屋内モー
ド」に設定されていた場合(S1014:屋内)、測位処理部は通信端末200の動作モ
ードを「屋内・屋外兼用モード」に設定する(S1016)。
【0057】
尚、S1014において、現在の動作モードが「屋内・屋外兼用モード」になっている
場合とは、例えば、図1において建物3の外にいた通信端末200のユーザが建物3の出
入口31に近づいて位置情報送信機100(1)の位置情報信号を受信した場合である。
【0058】
また、S1014において、現在の動作モードが「屋内モード」になっている場合とは
、例えば、図1において通信端末200のユーザが建物3の出入口31を通過して建物3
の中に入ったことにより、出入口31を通過した際に境界フラグが「1:オン」に設定さ
れている位置情報信号を送信する位置情報送信機100(1)からの位置情報信号を受信
してS1016で動作モードが「屋内モード」に設定され、その後、再び建物3の外に出
るためにユーザが出入口31に近づき、位置情報送信機100(1)の位置情報信号を受
信した場合である。
【0059】
このように、電源投入時等において初期設定されている通信端末200の動作モードは
、境界フラグが「1:オン」に設定されている位置情報送信機100からの位置情報信号
を通信端末200が受信することにより、自動的に通信端末200が自身の現在位置を取
得するのに好適な動作モードに設定される。このため、例えば通信端末200が屋内にあ
る場合は位置情報信号を受信する相関器の割合を増やし、逆に屋外にある場合は衛星測位
信号を受信する相関器の割合を増やすといった設定を自動的に行うことが可能となる。そ
してこのように動作モードの設定が適切に行われることにより通信端末200が自身の現
在位置を特定できない期間が少なくなって、通信端末200は、安定して確実に自身の現
在位置を取得することができるようになる。
【0060】
図10のS1017では、測位処理部は、次の位置決定処理(S1017)を行う。図
11は位置決定処理(S1017)を説明するフローチャートである。
【0061】
位置決定処理(S1017)において、まず測位処理部は、複数の位置情報信号を受信
しているか否かを判断する(S1117)。携帯端末200が複数の位置情報信号を受信
している場合とは、例えば、複数の位置情報送信機100の設置位置の中間位置付近にい
る場合や、現在通信端末200がある部屋に設けられている位置情報送信機100からの
位置情報信号とともに、他の部屋に設けられている位置情報送信機100からの位置情報
信号(壁、床、窓等を透過して届く位置情報信号)を受信してしまっている場合である。
【0062】
S1117において、携帯端末200が複数の位置情報信号を受信していると判断した
場合には(S1117:YES)、S1118に進む。一方、複数の位置情報信号を受信
していないと判断した場合には(S1117:NO)、S1119に進む。
【0063】
S1118では、測位処理部は、受信した複数の位置情報信号の中から、自身の現在位
置を求めるのに選択すべき位置情報信号を決定する。
【0064】
ここで測位処理部は、例えば電界強度測定部241から取得される各位置情報信号の夫
々の電界強度を比較して、電界強度の最も強い位置情報信号を選択する。
また例えば、測位処理部は、センサ部240から取得される気圧や照度等の値と位置情
報信号に含まれている位置情報のセンサ情報の値とを比較し、両者の類似度の最も高い位
置情報信号を選択する。
また例えば、測位処理部は、位置情報のセンサ情報315の気圧と自身がセンサ部24
0から取得した気圧との差が最も小さい位置情報信号を選択する。
また例えば、測位処理部は、位置情報のセンサ情報315の照度と自身がセンサ部24
0から取得した照度との差が最も小さい位置情報信号を選択する。
また例えば、測位処理部は、気圧や照度などに所定の重み付けをして求めた総合的な相
関値に基づいて、いずれの位置情報信号を選択するかを決定する。
【0065】
尚、このように、測位処理部は、通信端末200と位置情報送信機100の夫々で測定
した値を比較した結果に基づいて、つまり両者の相対的な関係に基づき選択すべき位置情
報信号を決定するので、大気圧の変化や日照の変化による照度の変化等の環境変化に影響
されることなく、選択すべき位置情報信号を適切に決定することができる。
【0066】
S1119において、測位処理部は、受信した位置情報信号(複数の位置情報信号を受
信している場合はS1118で決定した位置情報信号)に含まれている位置情報に基づき
自身の現在位置を求める。例えば測位処理部は、位置情報の設置高さ312、設置位置(
緯度313、経度314)を自身の現在位置とする。
【0067】
また例えば測位処理部は、位置情報の設置高さ312、設置位置(緯度313、経度3
14)を、位置情報のセンサ情報315とセンサ部240から取得される値とによって補
正した値を自身の現在位置とする。
【0068】
具体的には、例えば両者の気圧に差がある場合、気圧と高度の関係式(又は気圧と高度
の関係を示すテーブル)に基づき位置情報から取得した設置高さ312を補正する。また
例えば両者の照度に差がある場合には、照度と位置(緯度、経度)の関係を示すテーブル
(又は関係式)に基づき位置情報から取得した設置位置(緯度313、経度314)を補
正する。
【0069】
このように、測位処理部は、受信した位置情報から取得したセンサ情報315と、自身
のセンサ部240から取得される値とを比較することにより、位置情報から取得される設
置高さ312、設置位置(緯度313、経度314)を自動的に補正し、補正後の値を自
身の現在位置として取得する。このため、通信端末200は、自身の現在位置として正確
な値を取得することができる。
【0070】
また通信端末200が携帯電話機である場合等、位置情報送信機100の設置高さと通
信端末200の高さ(ユーザが通信端末200を携帯している高さ)があらかじめ知れて
いる場合には、測位処理部は、その差分を位置情報から取得される設置高さ312、設置
位置(緯度313、経度314)に加算又は減算することにより、位置情報の設置高さ3
12を補正する。
【0071】
ところで、図6では動作モードが2つ(屋内・屋外兼用、及び屋内)の場合について説
明したが、動作モードの数は必ずしも2つに限られない。例えば図12に示すように、動
作モードを3つ(屋外、屋内・屋外兼用、屋内)とすることもできる。図13は図6の動
作モード設定処理の変形例であり、動作モードが3つである場合における動作モード設定
処理を説明するフローチャートである。
【0072】
図13のS1311において、動作モード設定部は、通信端末200に現在設定されて
いる動作モードを取得する。次に動作モード設定部は、取得した動作モードに応じて相関
部221の各相関器が補足する無線信号(衛星測位信号又は位置情報信号)のチャンネル
及び中心周波数を設定する(S1312、S1313、S1314)。
【0073】
ここで図12に示すように、動作モードが「屋外」に設定されていた場合には(S12
11:屋外)、動作モード設定部は4個の相関器(1〜4)を衛星測位信号のチャンネル
(8ch、11ch、15ch、20ch)に設定し、他の1個の相関器(5)を位置情
報信号のチャンネル(180ch)に設定する。
【0074】
また動作モードが「屋内・屋外兼用」に設定されていた場合には(S1211:屋内・
屋外兼用)、動作モード設定部は2個の相関器(1〜2)を衛星測位信号のチャンネル(
8ch、11ch)に設定し、他の3個の相関器(3〜5)を位置情報信号のチャンネル
(175ch、179ch、180ch)に設定する。
【0075】
また動作モードが「屋内」に設定されていた場合には(S1211:屋内)、動作モー
ド設定部は1個の相関器(1)のみを衛星測位信号のチャンネル(8ch)に設定し、他
の4個の相関器(2〜5)を位置情報信号のチャンネル(174ch、175ch、17
9ch、180ch)に設定する。
【0076】
ここで図6におけるのと同様に、いずれの動作モードにおいても、少なくとも一つの相
関器(同図では相関器(5))は位置情報送信機100に付与されている特定のチャンネ
ル(180ch)を受信するように設定される。
【0077】
尚、動作モードが3つである場合においても、図6の場合と同様に相関器の数は5つに
限定されない。例えば相関部221が16個の相関器を有している場合には、動作モード
が「屋外」である場合は14個の相関器を衛星測位信号のチャンネルに設定し、他の2個
を位置情報信号のチャンネルに設定する。また動作モードが「屋外・屋内兼用」である場
合は7個の相関器を衛星測位信号のチャンネルに設定し、他の9個を位置情報信号のチャ
ンネルに設定する。また動作モードが「屋内」である場合は2個の相関器を衛星測位信号
のチャンネルに設定し、他の14個を位置情報信号のチャンネルに設定する。
【0078】
尚、動作モードが「屋外」に設定されている通信端末200が、境界フラグ311が「
1」に設定されている位置情報送信機100(例えば図1の位置情報送信機100(1)
)からの位置情報信号を受信した場合に、通信端末200が自動的に自身の動作モードを
「屋内・屋外兼用」又は「屋内」に切り替えるようにしてもよい。
【0079】
また動作モードが「屋内」又は「屋内・屋外兼用」に設定されている通信端末200が
、境界フラグが「1」に設定されている位置情報送信機100(1)からの位置情報信号
を受信した場合に、通信端末200が自動的に自身の動作モードを「屋内」又は「屋内・
屋外兼用」から「屋外」に切り替えるようにしてもよい。
【0080】
また動作モードが「屋内・屋外兼用」に設定されている通信端末200が、境界フラグ
が「1」に設定されている位置情報送信機100(1)以外の位置情報送信機(2〜5)
からの位置情報信号を受信した場合に、通信端末200が自動的に自身の動作モードを「
屋内・屋外兼用」から「屋内」に切り替えるようにしてもよい。
【0081】
また動作モードが「屋内」又は「屋内・屋外兼用」に設定されている通信端末200が
、境界フラグが「1」に設定されている位置情報送信機100(1)以外の位置情報送信
機(2〜5)からの位置情報信号を所定時間以上受信できなくなった場合に、通信端末2
00が自動的に自身の動作モードを「屋内」又は「屋内・屋外兼用」から「屋外」に切り
替えるようにしてもよい。
【0082】
また動作モードが「屋内・屋外兼用」又は「屋内」に設定されている通信端末200が
、人工衛星2からの衛星測位信号を受信した場合に、通信端末200が自動的に自身の動
作モードを「屋内」又は「屋内・屋外兼用」から「屋外」に切り替えるようにしてもよい
(衛星測位信号を優先する設定)。
【0083】
ところで、以上の実施形態の説明は本発明の理解を容易にするためのものであり、本発
明を限定するものではない。本発明はその趣旨を逸脱することなく、変更、改良され得る
と共に、本発明にはその等価物が含まれることは勿論である。
【0084】
例えば、以上の説明では通信端末200が、自身の各相関器に異なるチャンネルを割り
当てるようにしているが、自身の複数の相関器の夫々が同じチャンネルの位置情報信号を
受信するように設定し、同じチャンネルの位置情報信号を受信するように設定された各相
関器が、設定されているチャンネルについてのサーチすべき周波数範囲における異なる周
波数範囲をサーチするようにしてもよい。
【0085】
具体的には、例えば、設定されているチャンネルのサーチすべき周波数範囲が周波数f
1〜f3である場合には、第1の相関器が周波数f1〜f2(f1<f2<f3)をサー
チするように設定し、第2の相関器が周波数f2〜f3をサーチするように設定する。
【0086】
このようにすれば、当該チャンネルのサーチが複数の相関器により分担して同時並行的
に行われ、個々の相関器がサーチすべき周波数範囲が狭くなるのでサーチ時間が短縮され
る。その結果、通信端末200が自身の現在位置を取得するのに要する時間が短縮される
こととなる。尚、第1の相関器がサーチする周波数範囲と第2の相関器がサーチする周波
数範囲とは、重複する範囲がなるべく少なくなるように設定することが好ましい。
【0087】
また例えば、周辺他機チャンネル317に設定されているチャンネルを設定した位置情
報を含んだ位置情報信号を送信し、通信端末200が、位置情報の周辺他機チャンネル3
17に設定されているチャンネルを受信するように自身の相関器を自動的に設定するよう
にしてもよい。このようにすれば、例えば通信端末200が移動した際、移動先に存在す
る位置情報送信機100から送信される位置情報信号のサーチに要する時間が短縮され、
その結果、通信端末200が自身の現在位置を取得するのに要する時間が短縮される。
【0088】
尚、以上では、センサとして気圧センサ及び照度センサを例示しているが、センサの種
類はこれらに限られない。例えば、温度センサや湿度センサであってもよい。また人工衛
星2や位置情報送信機100から送信される無線信号の種類は電波に限られない。例えば
無線信号は光や赤外線等を利用するものであってもよい。
【符号の説明】
【0089】
2 人工衛星
3 建物
31 出入口
100 位置情報送信機
110 デジタル処理部
111 CPU
112 記憶部
1121 位置情報送信プログラム
1122 位置情報データベース
120 無線送信部
121 D/A変換部
122 搬送波生成部
123 変調部
130 クロック部
140 センサ部
200 通信端末
210 ベースバンド処理部
211 CPU
212 記憶部
2121 動作モード設定プログラム
2122 測位処理プログラム
2123 位置補正プログラム
220 無線受信部
221 相関部
223 復調部
240 センサ部
241 電界強度測定部
311 境界フラグ
312 設置高さ
313 緯度
314 経度
315 センサ情報
316 自機チャンネル
317 周辺他機チャンネル
【特許請求の範囲】
【請求項1】
位置を示す情報である位置情報を含んだ無線信号である位置情報信号を、人工衛星から
送信される測位のための無線信号である衛星測位信号と互換性を有する信号として送信す
る送信部を有する位置情報送信機と、
前記衛星測位信号を受信すると当該衛星測位信号から人工衛星の位置を求めることによ
り自身の現在位置を求め、前記位置情報信号を受信すると当該位置情報信号に含まれる前
記位置情報に基づき自身の現在位置を求める測位処理部、及び
夫々が前記無線信号を独立して受信可能な複数の相関器
を有する通信端末と、
を含み、
前記送信部が、前記相関器の夫々を前記衛星測位信号又は前記位置情報信号のいずれを
受信するように設定するかを決定するために用いる情報である動作モード決定情報を含む
前記位置情報信号を送信し、
前記通信端末が、受信した前記位置情報信号に含まれている前記動作モード決定情報に
基づき前記相関器が前記衛星測位信号又は前記位置情報信号のいずれを受信するのかを設
定する動作モード設定部を有すること
を特徴とする測位システム。
【請求項2】
請求項1に記載の測位システムであって、
前記位置情報送信機は、センサにより取得される現在の自身の周囲環境を示す情報であ
る設置位置環境情報を含んだ前記位置情報信号を送信し、
前記通信端末は、
自身の周囲環境を示す情報である現在位置環境情報を生成するセンサを有し、
前記位置情報測位処理部は、受信した前記位置情報信号に含まれている前記設置位置環
境情報と前記現在位置環境情報とを比較することにより自身の現在位置を補正すること
を特徴とする測位システム。
【請求項3】
請求項2に記載の測位システムであって、
前記設置位置環境情報及び前記現在位置環境情報は気圧又は照度であり、
前記位置情報測位処理部は、両者の気圧差、又は両者の照度差に基づき自身の位置を補
正すること
を特徴とする測位システム。
【請求項4】
請求項1に記載の測位システムであって、
前記位置情報送信機を複数含み、
前記位置情報送信機の夫々は、
前記位置情報信号を前記位置情報送信機ごとに異なるチャンネルで送信し、
センサにより取得される現在の自身の周囲環境を示す情報である設置位置環境情報を含
んだ前記位置情報信号を送信し、
前記通信端末は、
複数の前記相関器の夫々に異なるチャンネルの前記位置情報信号を受信するように設定
し、
前記通信端末は、
自身の周囲環境を示す情報である現在位置環境情報を生成するセンサを有し、
複数の前記相関器がチャンネルの異なる複数の前記位置情報信号を受信した場合に受信
した前記位置情報信号に含まれている前記設置位置環境情報と前記現在位置環境情報とを
比較することにより、受信した前記位置情報信号のうちから選択すべき前記位置情報信号
を決定し、
前記位置情報測位処理部は、決定した前記位置情報信号に基づいて自身の現在位置を求
めること
を特徴とする測位システム。
【請求項5】
請求項1に記載の測位システムであって、
前記位置情報送信機を複数含み、
前記位置情報送信機の夫々は、前記位置情報信号を前記位置情報送信機ごとに異なるチ
ャンネルで送信し、
前記通信端末は、
複数の前記相関器の夫々に異なるチャンネルの前記位置情報信号を受信するように設定
し、
受信した前記位置情報信号の電界強度を測定する電界強度測定部を有し、
複数の前記相関器がチャンネルの異なる複数の前記位置情報信号を受信した場合に受信
した各前記位置情報信号の電界強度を比較することにより、受信した前記位置情報信号の
うちから選択すべき前記位置情報信号を決定し、
前記位置情報測位処理部は、決定した前記位置情報信号に基づいて自身の現在位置を求
めること
を特徴とする測位システム。
【請求項6】
請求項1に記載の測位システムであって、
複数の前記位置情報送信機を含み、
前記通信端末は、
自身の複数の前記相関器の夫々が同じチャンネルの前記位置情報信号を受信するように
設定し、
同じチャンネルの前記位置情報信号を受信するように設定された前記相関器の夫々が、
当該チャンネルについてサーチすべき周波数範囲における異なる周波数範囲をサーチする
ように設定すること
を特徴とする測位システム。
【請求項7】
請求項1に記載の測位システムにおける前記位置情報送信機であって、
自身の位置を示す情報である位置情報を含んだ無線信号である位置情報信号を、人工衛
星から送信される測位のための無線信号である衛星測位信号と互換性を有する信号として
送信し、
前記通信端末の前記相関器の夫々を前記衛星測位信号又は前記位置情報信号のいずれを
受信するように設定するかを決定するために用いる情報である動作モード決定情報を含む
前記位置情報信号を送信する送信部を有すること
を特徴とする位置情報送信機。
【請求項8】
請求項1に記載の測位システムにおける前記通信端末であって、
前記衛星測位信号を受信すると当該衛星測位信号から人工衛星の位置を求めることによ
り自身の現在位置を求め、前記位置情報信号を受信すると当該位置情報信号に含まれる前
記位置情報に基づき自身の現在位置を求める測位処理部と、
夫々が前記無線信号を独立して受信可能な複数の相関器と、
受信した前記位置情報信号に含まれている前記動作モード決定情報に基づき前記相関器
が前記衛星測位信号又は前記位置情報信号のいずれを受信するのかを設定する動作モード
設定部と
を有することを特徴とする通信端末。
【請求項9】
位置を示す情報である位置情報を含んだ無線信号である位置情報信号を、人工衛星から
送信される測位のための無線信号である衛星測位信号と互換性を有する信号として送信す
る送信部を有する位置情報送信機と、
前記衛星測位信号を受信すると当該衛星測位信号から人工衛星の位置を求めることによ
り自身の現在位置を求め、前記位置情報信号を受信すると当該位置情報信号に含まれる前
記位置情報に基づき自身の現在位置を求める測位処理部、及び
夫々が前記無線信号を独立して受信可能な複数の相関器
を有する通信端末と、
を含む測位システムの制御方法であって、
前記送信部が、前記相関器の夫々を前記衛星測位信号又は前記位置情報信号のいずれを
受信するように設定するかを決定するために用いる情報である動作モード決定情報を含む
前記位置情報信号を送信し、
前記通信端末が、受信した前記位置情報信号に含まれている前記動作モード決定情報に
基づき前記相関器が前記衛星測位信号又は前記位置情報信号のいずれを受信するのかを設
定すること、
を特徴とする測位システムの制御方法。
【請求項1】
位置を示す情報である位置情報を含んだ無線信号である位置情報信号を、人工衛星から
送信される測位のための無線信号である衛星測位信号と互換性を有する信号として送信す
る送信部を有する位置情報送信機と、
前記衛星測位信号を受信すると当該衛星測位信号から人工衛星の位置を求めることによ
り自身の現在位置を求め、前記位置情報信号を受信すると当該位置情報信号に含まれる前
記位置情報に基づき自身の現在位置を求める測位処理部、及び
夫々が前記無線信号を独立して受信可能な複数の相関器
を有する通信端末と、
を含み、
前記送信部が、前記相関器の夫々を前記衛星測位信号又は前記位置情報信号のいずれを
受信するように設定するかを決定するために用いる情報である動作モード決定情報を含む
前記位置情報信号を送信し、
前記通信端末が、受信した前記位置情報信号に含まれている前記動作モード決定情報に
基づき前記相関器が前記衛星測位信号又は前記位置情報信号のいずれを受信するのかを設
定する動作モード設定部を有すること
を特徴とする測位システム。
【請求項2】
請求項1に記載の測位システムであって、
前記位置情報送信機は、センサにより取得される現在の自身の周囲環境を示す情報であ
る設置位置環境情報を含んだ前記位置情報信号を送信し、
前記通信端末は、
自身の周囲環境を示す情報である現在位置環境情報を生成するセンサを有し、
前記位置情報測位処理部は、受信した前記位置情報信号に含まれている前記設置位置環
境情報と前記現在位置環境情報とを比較することにより自身の現在位置を補正すること
を特徴とする測位システム。
【請求項3】
請求項2に記載の測位システムであって、
前記設置位置環境情報及び前記現在位置環境情報は気圧又は照度であり、
前記位置情報測位処理部は、両者の気圧差、又は両者の照度差に基づき自身の位置を補
正すること
を特徴とする測位システム。
【請求項4】
請求項1に記載の測位システムであって、
前記位置情報送信機を複数含み、
前記位置情報送信機の夫々は、
前記位置情報信号を前記位置情報送信機ごとに異なるチャンネルで送信し、
センサにより取得される現在の自身の周囲環境を示す情報である設置位置環境情報を含
んだ前記位置情報信号を送信し、
前記通信端末は、
複数の前記相関器の夫々に異なるチャンネルの前記位置情報信号を受信するように設定
し、
前記通信端末は、
自身の周囲環境を示す情報である現在位置環境情報を生成するセンサを有し、
複数の前記相関器がチャンネルの異なる複数の前記位置情報信号を受信した場合に受信
した前記位置情報信号に含まれている前記設置位置環境情報と前記現在位置環境情報とを
比較することにより、受信した前記位置情報信号のうちから選択すべき前記位置情報信号
を決定し、
前記位置情報測位処理部は、決定した前記位置情報信号に基づいて自身の現在位置を求
めること
を特徴とする測位システム。
【請求項5】
請求項1に記載の測位システムであって、
前記位置情報送信機を複数含み、
前記位置情報送信機の夫々は、前記位置情報信号を前記位置情報送信機ごとに異なるチ
ャンネルで送信し、
前記通信端末は、
複数の前記相関器の夫々に異なるチャンネルの前記位置情報信号を受信するように設定
し、
受信した前記位置情報信号の電界強度を測定する電界強度測定部を有し、
複数の前記相関器がチャンネルの異なる複数の前記位置情報信号を受信した場合に受信
した各前記位置情報信号の電界強度を比較することにより、受信した前記位置情報信号の
うちから選択すべき前記位置情報信号を決定し、
前記位置情報測位処理部は、決定した前記位置情報信号に基づいて自身の現在位置を求
めること
を特徴とする測位システム。
【請求項6】
請求項1に記載の測位システムであって、
複数の前記位置情報送信機を含み、
前記通信端末は、
自身の複数の前記相関器の夫々が同じチャンネルの前記位置情報信号を受信するように
設定し、
同じチャンネルの前記位置情報信号を受信するように設定された前記相関器の夫々が、
当該チャンネルについてサーチすべき周波数範囲における異なる周波数範囲をサーチする
ように設定すること
を特徴とする測位システム。
【請求項7】
請求項1に記載の測位システムにおける前記位置情報送信機であって、
自身の位置を示す情報である位置情報を含んだ無線信号である位置情報信号を、人工衛
星から送信される測位のための無線信号である衛星測位信号と互換性を有する信号として
送信し、
前記通信端末の前記相関器の夫々を前記衛星測位信号又は前記位置情報信号のいずれを
受信するように設定するかを決定するために用いる情報である動作モード決定情報を含む
前記位置情報信号を送信する送信部を有すること
を特徴とする位置情報送信機。
【請求項8】
請求項1に記載の測位システムにおける前記通信端末であって、
前記衛星測位信号を受信すると当該衛星測位信号から人工衛星の位置を求めることによ
り自身の現在位置を求め、前記位置情報信号を受信すると当該位置情報信号に含まれる前
記位置情報に基づき自身の現在位置を求める測位処理部と、
夫々が前記無線信号を独立して受信可能な複数の相関器と、
受信した前記位置情報信号に含まれている前記動作モード決定情報に基づき前記相関器
が前記衛星測位信号又は前記位置情報信号のいずれを受信するのかを設定する動作モード
設定部と
を有することを特徴とする通信端末。
【請求項9】
位置を示す情報である位置情報を含んだ無線信号である位置情報信号を、人工衛星から
送信される測位のための無線信号である衛星測位信号と互換性を有する信号として送信す
る送信部を有する位置情報送信機と、
前記衛星測位信号を受信すると当該衛星測位信号から人工衛星の位置を求めることによ
り自身の現在位置を求め、前記位置情報信号を受信すると当該位置情報信号に含まれる前
記位置情報に基づき自身の現在位置を求める測位処理部、及び
夫々が前記無線信号を独立して受信可能な複数の相関器
を有する通信端末と、
を含む測位システムの制御方法であって、
前記送信部が、前記相関器の夫々を前記衛星測位信号又は前記位置情報信号のいずれを
受信するように設定するかを決定するために用いる情報である動作モード決定情報を含む
前記位置情報信号を送信し、
前記通信端末が、受信した前記位置情報信号に含まれている前記動作モード決定情報に
基づき前記相関器が前記衛星測位信号又は前記位置情報信号のいずれを受信するのかを設
定すること、
を特徴とする測位システムの制御方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】

【図12】

【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−211909(P2012−211909A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2012−126690(P2012−126690)
【出願日】平成24年6月4日(2012.6.4)
【分割の表示】特願2008−102715(P2008−102715)の分割
【原出願日】平成20年4月10日(2008.4.10)
【出願人】(502129933)株式会社日立産機システム (1,140)
【Fターム(参考)】
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願日】平成24年6月4日(2012.6.4)
【分割の表示】特願2008−102715(P2008−102715)の分割
【原出願日】平成20年4月10日(2008.4.10)
【出願人】(502129933)株式会社日立産機システム (1,140)
【Fターム(参考)】
[ Back to top ]