
測位システム
【課題】 電波、光、超音波もしくは音波が遮蔽、反射、回折、屈折しうる環境においても、測位可能とし、高確度な座標値を算出できる測位システムを提供する。
【解決手段】 有限空間内に,ミュオン検出機能と時計と通信機能を有するノードを多数配置し、そのノードの一部の座標値は既知とした上で,各ノードで検出した飛来イベントの時刻情報をノードIDと共に測位サーバに伝達蓄積する。蓄積された情報と既知のノード座標値を基に、ミュオンの軌跡を算出し、さらにそれを基に可動ノードの座標値を算出する。
【解決手段】 有限空間内に,ミュオン検出機能と時計と通信機能を有するノードを多数配置し、そのノードの一部の座標値は既知とした上で,各ノードで検出した飛来イベントの時刻情報をノードIDと共に測位サーバに伝達蓄積する。蓄積された情報と既知のノード座標値を基に、ミュオンの軌跡を算出し、さらにそれを基に可動ノードの座標値を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、天然放射線ミュオンを利用して,可動物体の正確な座標値を同定するための方法に関する。
【背景技術】
【0002】
従来,座標値が既知の複数の通信装置と,座標値が未知の可動物体に設置された通信装置との間の直線距離を,通信の過程で得られる情報をもとに算出し,三辺測量の原理により,座標値が未知の可動物体の座標値を得る技術が知られている(非特許文献1)。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】海洋音響学会編、「海洋音響の基礎と応用」、p.236−p.245
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記の通信装置は,一般に電波,光,超音波もしくは音波を通信に利用する。
【0005】
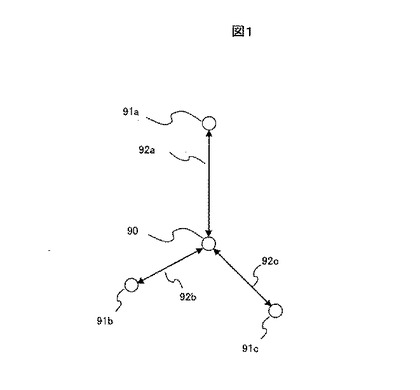
図1に例示するように、座標値が未知の可動物体に設置された通信装置90が、座標値が既知の通信装置91a、91b、91cとの間で、直接波により通信可能である場合に、それら直接波の行程92a、92b、92cは、例えば往復の通信に要する時間を基に算出可能であり、その情報を基に、通信装置90の座標値が算出可能である。
【0006】
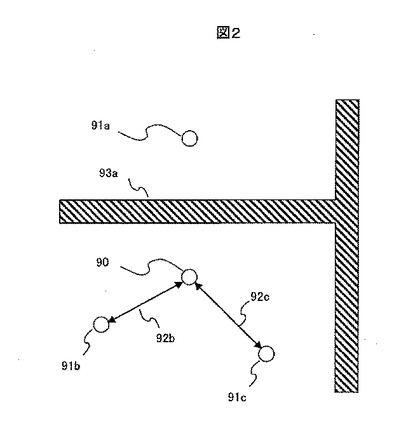
一方、図2に例示するように、通信装置90および91aの間を結ぶ直線上に障害物93aが存在する場合には,電波,光,超音波もしくは音波が前記の障害物93aにより遮蔽されるため、直接波による通信が成立せず、通信装置90および91aの間の直線距離が取得されない。この場合は、座標値が未知の可動物体の座標値が得られない。すなわち、測位不能である。
【0007】
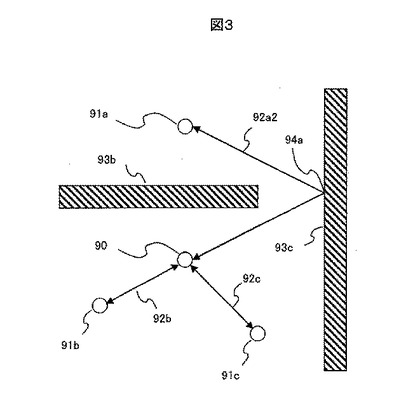
また、図3に例示するように、障害物93bの存在により通信装置90および91aの間で直接波による通信が成立しない場合であっても、一方の通信装置から発せられた波が障害物93c表面に位置する反射点94aにおける反射を経てもう一方の通信装置に到達するマルチパス波により通信が成立する場合があるが、直接波による通信と誤ってみなされることにより、マルチパス波の行程92a2が、送受信装置間の直線距離として誤って取得される。すなわち、測位確度が低い。とくに、通信装置および障害物の位置関係に変化が無い場合には、前記のマルチパス波が誤って直接波とみなされる状況は再現する確率が高く、多数の試行を基に統計的に正確な測位を実現するという手段を採用することができない。
【0008】
以上のように、障害物の存在する空間において、電波,光,超音波もしくは音波を利用する通信装置間の直線距離を正確に取得することが困難であり,その結果,座標値が未知の可動物体の座標値を正確に算出することが困難である。
【0009】
そこで,本発明は,任意の障害物が存在する環境において,座標値が未知の可動物体の正確な座標値を得る方法の提供を目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため、本願で開示する発明の概要を説明すれば以下の通りである。
【0011】
本願請求項1に記載の発明は、互いの相対位置が既知である第1乃至第4の粒子線検出装置と、前記第1乃至第4粒子線検出装置に対して相対位置が未知である第5粒子線検出装置と、前記第1乃至第5粒子線検出装置に接続された位置計算部と、前記位置計算部に接続されたクロックと、を有する測位システムであって、前記位置計算部はさらに、前記第1乃至第5粒子線検出装置からの受信信号と前記クロックからのクロック信号とを用い前記受信信号に時刻情報を付与するイベント情報生成部と、前記時刻情報から一定の時間範囲にある前記受信信号に対して関連付け処理を行う同時性比較部と、前記関連付け処理の情報から前記第1粒子線検出装置と前記第5粒子線検出装置との相対位置を算出する座標算出部と、を有することを特徴とする測位システムである。
【発明の効果】
【0012】
本発明によれば、電波、光、超音波もしくは音波が遮蔽、反射、回折、屈折しうる環境においても、測位可能とし、高確度な座標値を算出できる測位システムを提供することができる。
【図面の簡単な説明】
【0013】
【図1】従来の電波、光、超音波もしくは音波の直接波の行程距離を利用した測位システムの測位原理を示す図である。
【図2】従来の測位システムが障害物により測位不能となる場合を示す図である。
【図3】従来の測位システムが障害物により正しく測位できない場合を示す図である。
【図4】本発明の一実施形態の測位システムの構成を示す図である。
【図5】本発明の一実施形態のミュオン検出ノードの構成を示す図である。
【図6】本発明の一実施形態の測位サーバの構成を示す図である。
【図7】本発明の一実施形態のイベント情報テーブルの例を示す図である。
【図8】本発明の一実施形態の軌跡情報テーブルの例を示す図である。
【図9】本発明の一実施形態のノード座標情報テーブルの例を示す図である。
【図10】本発明の一実施形態の測位サーバがミュオン飛来イベント情報を受信した際のフローチャートである。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態について図面を用いて説明する。
【0015】
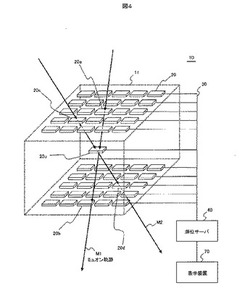
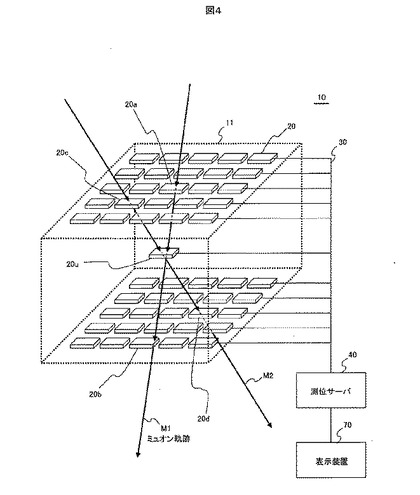
図4は、本発明の一実施形態の測位システムの構成を示す図である。本実施形態の測位システム10は、有限空間11内に配置された5個以上のミュオン検出ノード20と、通信手段30と、測位サーバ40と、表示装置70を構成要素として含む。
【0016】
有限空間11は、長さを限定するわけではないが、例えば一辺の長さが100mの立方体である。これらのミュオン検出ノード20には、移動せず座標値が既知のノード(以後、不動ノードと表記する)が4個以上、可動物体に搭載され座標値が未知のノード(以後、可動ノードと表記する)が1個以上含まれる。
【0017】
二次宇宙線ミュオンは、天然放射線の一種であり、陽子や種々の原子核を主な成分とする一次宇宙線が、地球の大気上層部の大気中の原子核と衝突し、核反応をカスケード状に起こした結果発生し、地表に達する高エネルギーの素粒子であり、太陽光のように日常的に地表に飛来している。
【0018】
一般にミュオンは、電磁気力による相互作用をもつが、核力(強い相互作用)をもたないため、透過性と直進性が極めて高い。また、電荷をもつ粒子であるため、シンチレータの発光現象を利用することで、容易に検出可能である。
【0019】
図4に例示したミュオン軌跡M1は、1個のミュオンの軌跡を示している。このミュオンは、上空から有限空間11に入射し、まず不動ノード20aを貫通する。次に、可動ノード20uと不動ノード20bを順次貫通し、その後有限空間11を離れる。
【0020】
一般に二次宇宙線ミュオンのエネルギは10MeVからGeVの高いオーダーにあるため、この一連の過程におけるミュオンの進行方向の変化は無視できる。そのため、ミュオン検出ノード20a、20u、20bを同一のミュオンが貫通した事実を検出することにより、この3個のノードが直線状に位置している事実を検出できる。
【0021】
同様に、ミュオン軌跡M2が、不動ノード20c、可動ノード20u、不動ノード20dを貫通している事実から、この3個のノードが直線状に位置している事実を検出できる。一方、不動ノード20a、20b、20c、20dの座標値は既知であることから、幾何学的連立方程式を解くことで、可動ノード20uの未知の座標値を算出することができる。
【0022】
このとき算出される座標値はシンチレータのサイズに応じた値となる。したがって、シンチレータのサイズをより小さくすることで、可動ノードが得たい座標値の分解能を向上させることができる。
【0023】
また、図4のように不動ノード20a、20bが配置される平面または不動ノード20c、20d配置される平面がある場合、可動ノード20uとこれらの平面との距離(平面に対して法線方向の距離)を事前に入手できればミュオン軌跡M1のみでも可動ノード20uの未知の座標値を算出することができる。このように、事前に得られる他の情報を組み合わせることで、計算処理負荷の低減や確度向上を図ることもできる。
【0024】
また、図4では不動ノード20a、20bが配置される平面と不動ノード20c、20d配置される平面との中間に可動ノード20uがある状態を表している。しかしながら、本願はこれに限定されるわけではなく、可動ノード20uが中間にない場合でも、幾何学的連立方程式を解くことで位置を特定できる。
【0025】
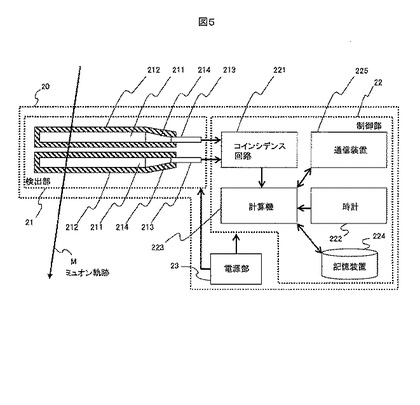
図5は、測位システム10におけるミュオン検出ノード20の構成を示す図である。ミュオン検出ノード20は、検出部21と、制御部22と、電源部23を構成要素として含む。
【0026】
検出部21は、地面に水平に配置された2枚の平板状のシンチレータ211と、シールド212と、2個の光検出器213と、2個の導光器214を構成要素として含み、制御部22は、コインシデンス回路221と、時計222と、計算機223と、記憶装置224と、通信装置225を構成要素として含む。
【0027】
シンチレータ211は、ミュオンを含む放射線が通過した際に蛍光する性質を有する。シンチレータ211の材質は、例えばヨウ化ナトリウム(NaI)が適している。ヨウ化ナトリウムはミュオンに対して良好な発光強度を得られる利点があるが、潮解性を有する。したがって、発光強度や他の特性を考慮し、有限空間ごとに適切な材質を選択しても良い。特にサイズを限定するわけではないが、本実施例のシンチレータ211の厚さは20mm、長さ100mm、幅100mmで、2枚のシンチレータの間隔は10mmである。
【0028】
シールド212は、二次宇宙線ミュオン以外の放射線および環境光がシンチレータ211および導光器214に進入することを防ぐために、シンチレータ211および導光器14を外部表面を覆う。これにより、ミュオンに起因するシンチレーションのみを観測することができるのでミュオン検出の信頼性が向上する。
【0029】
導光器214は、シンチレータ211における蛍光を光検出器213に導く。光検出器213は、光を電気信号に変換する機能を有する。光検出器213には、例えば光電子増倍管が適している。
【0030】
二次宇宙線ミュオンの飛来以外にも、熱雑音の影響により光検出器213から信号が伝達される可能性があるため、コインシデンス回路221は、2個の光検出器213から同時に信号が出力されたか否かを比較し、同時とみなされた場合にのみ、計算機223に信号を伝達する。これにより、ミュオン飛来イベントのみが計算機223に伝達される。
【0031】
ここでいう、同時とみなされる場合とは、二次宇宙線ミュオンの一般的な速度を基に、2枚のシンチレータ211を通過するために必要な時間が考慮されている。
【0032】
計算機223は、コインシデンス回路221から信号が伝達された時刻を、時計222から取得し、記憶装置224に追加登録する。計算機223は、通信装置225が送信可能か否かを常に監視し、送信可能の場合には、記憶装置224に登録されている時刻情報を、ミュオン検出ノード20のIDとともに、イベント情報519として通信手段30を介して測位サーバ40に伝達する。計算機223は、送信が完了した時刻情報を記憶装置224から削除する。
【0033】
電源部23は、光検出器213と、コインシデンス回路221と、時計222と、計算機223と、記憶装置224と、通信装置225に必要な電力を供給する。通信手段30は、ミュオン検出ノード20と、測位サーバ40との間の通信を実現する。ミュオン検出ノード20が測位対象の可動物体に搭載されている場合は、無線通信が適している。ミュオン検出ノード20が、位置が既知で固定されている場合は、有線通信が適している。
【0034】
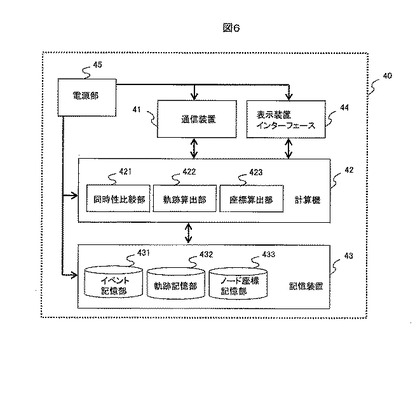
図6は、測位システム10における測位サーバ40の構成を示す図である。測位サーバ40は、通信装置41と、計算機42と、記憶装置43と、表示装置インターフェース44と、電源部45を構成要素として含む。計算機42は、同時性比較部421と、軌跡算出部422と、座標算出部423を構成要素として含む。
【0035】
記憶装置43は、イベント記憶部431と、軌跡記憶部432と、ノード座標記憶部433を構成要素として含む。電源部45は,通信装置41と,計算機42と,記憶装置43と,表示装置インターフェース44とに必要な電力を供給する。
【0036】
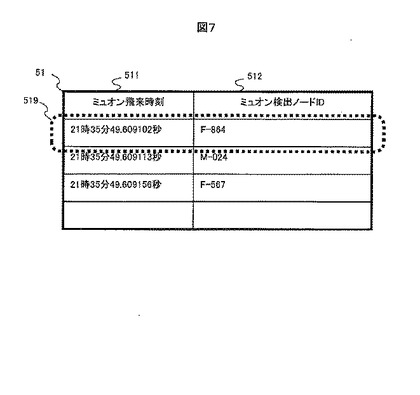
図7は、イベント記憶部431に格納されるイベント情報テーブル51の例を示す図である。イベント情報テーブル51は、イベント情報519の集合である。1組のイベント情報519は、1個のミュオン飛来イベントに対応しており、ミュオン飛来時刻511、ミュオン検出ノードID512を含む。
【0037】
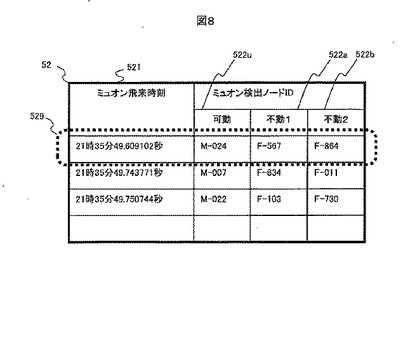
図8は、軌跡記憶部432に格納される軌跡情報テーブル52の例を示す図である。軌跡情報テーブル52は、軌跡情報529の集合である。1組の軌跡情報529は、1本の直線状のミュオン軌跡に対応しており、ミュオン飛来時刻521、1個の可動ノードのID522u,2個の不動ノードのID522a,522bを含む。
【0038】
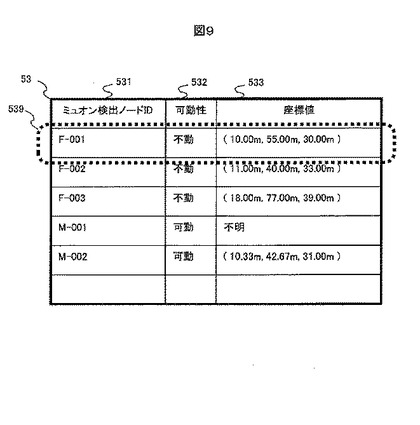
図9は、ノード座標記憶部433に格納されるノード座標情報テーブル53の例を示す図である。ノード座標情報テーブル53は、ノード座標情報539の集合である。1組のノード座標情報539は、1個のミュオン検出ノード20に対応しており、ミュオン検出ノードID531、可動性532、座標値533を含む。
【0039】
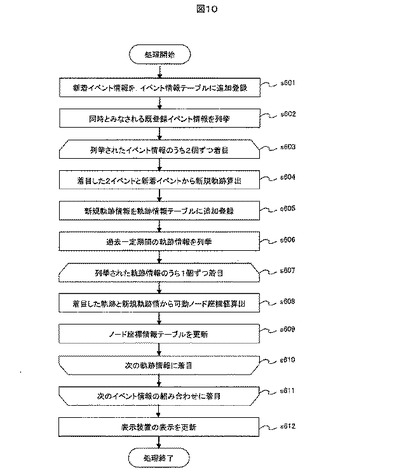
図10は,測位サーバ40がミュオン検出ノード20からミュオン飛来イベント情報を受信した際のフローチャートである。
【0040】
通信装置41が、ミュオン検出ノード20から伝達されたイベント情報519を受信すると、計算機42は、イベント記憶部431のイベント情報テーブル51にそのイベント情報519を追加登録する(s601)。
【0041】
同時性比較部421は、イベント情報テーブル51を検索し,新規イベント情報519の時刻と同時とみなされる時刻が記載された既登録イベント情報を列挙する(s602)。
【0042】
ここでいう、同時とみなされる時刻とは、2つの不動ノードと1つの可動ノードとのミュオン飛来時刻が一定の時間範囲内にあるかで判断している。一定の時間範囲とは、二次宇宙線ミュオンの一般的な速度を基に2つの不動ノードと1つの可動ノードとを通過するために必要な時間が考慮されている。
【0043】
計算機42は,列挙されたイベント情報519のうち,2個ずつに着目するループを開始する(s603)。
【0044】
軌跡算出部422は,着目している2個のイベント情報519と,新規イベント情報の3個から,新規に軌跡情報529を算出する(s604)。
【0045】
軌跡算出部422は,前記新規軌跡情報529を,軌跡記憶部432の軌跡情報テーブル52に追加登録する(s605)。
【0046】
軌跡算出部422は,軌跡情報テーブル52を検索し,前記新規イベント情報519の時刻の前後のある一定の時間範囲内の時刻が記された軌跡情報529を列挙する(s606)。
【0047】
計算機42は,列挙された軌跡情報529のうち,1個に着目するループを開始する(s607)。
【0048】
座標算出部423は,着目している軌跡情報529と,前記新規軌跡情報529を基に,ノード座標記憶部433のノード座標情報テーブル53を適宜参照し,両軌跡に含まれる可動ノードの座標値の算出を試みる(s608)。
【0049】
可動ノードの座標値が新たに算出された場合は,座標算出部423は,ノード座標情報テーブル53の該当箇所を更新する(s609)。
【0050】
計算機42は,次の軌跡情報529に着目し,処理をステップs608に戻す(s610)。
【0051】
着目すべき軌跡情報529が無くなった際には,計算機42は,次のイベント情報2個の組み合わせに着目し,処理をステップs604に戻す(s611)。
【0052】
着目すべきイベント情報2個の組み合わせが無くなった際には,計算機42は,表示装置インターフェース44を介して表示装置70にノード座標記憶部433に格納された全ての可動ノードの座標値を伝達し,予め用意されたフロアマップ等の上に可動物体の位置を重畳表示する(s612)。
【0053】
なお,本実施例において,ミュオン検出ノード20はミュオン飛来イベントのみを検出する機能を備えるが,単一のシンチレータに複数の光検出器を接続し,各光検出器で検出された光の強度を比較することで,ミュオンの通過点をシンチレータ内で特定する機能を備えても良い。このような構成をとることで、複数のシンチレータを並べる必要がなくなり、検出面積を減少させることなくミュオン検出ノード数を減らすことができる。
【符号の説明】
【0054】
10 測位システム
11 有限空間
20a、20b、20c、20d 不動ノード
20u 可動ノード
30 通信手段
40 測位サーバ
70 表示装置
【技術分野】
【0001】
本発明は、天然放射線ミュオンを利用して,可動物体の正確な座標値を同定するための方法に関する。
【背景技術】
【0002】
従来,座標値が既知の複数の通信装置と,座標値が未知の可動物体に設置された通信装置との間の直線距離を,通信の過程で得られる情報をもとに算出し,三辺測量の原理により,座標値が未知の可動物体の座標値を得る技術が知られている(非特許文献1)。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】海洋音響学会編、「海洋音響の基礎と応用」、p.236−p.245
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記の通信装置は,一般に電波,光,超音波もしくは音波を通信に利用する。
【0005】
図1に例示するように、座標値が未知の可動物体に設置された通信装置90が、座標値が既知の通信装置91a、91b、91cとの間で、直接波により通信可能である場合に、それら直接波の行程92a、92b、92cは、例えば往復の通信に要する時間を基に算出可能であり、その情報を基に、通信装置90の座標値が算出可能である。
【0006】
一方、図2に例示するように、通信装置90および91aの間を結ぶ直線上に障害物93aが存在する場合には,電波,光,超音波もしくは音波が前記の障害物93aにより遮蔽されるため、直接波による通信が成立せず、通信装置90および91aの間の直線距離が取得されない。この場合は、座標値が未知の可動物体の座標値が得られない。すなわち、測位不能である。
【0007】
また、図3に例示するように、障害物93bの存在により通信装置90および91aの間で直接波による通信が成立しない場合であっても、一方の通信装置から発せられた波が障害物93c表面に位置する反射点94aにおける反射を経てもう一方の通信装置に到達するマルチパス波により通信が成立する場合があるが、直接波による通信と誤ってみなされることにより、マルチパス波の行程92a2が、送受信装置間の直線距離として誤って取得される。すなわち、測位確度が低い。とくに、通信装置および障害物の位置関係に変化が無い場合には、前記のマルチパス波が誤って直接波とみなされる状況は再現する確率が高く、多数の試行を基に統計的に正確な測位を実現するという手段を採用することができない。
【0008】
以上のように、障害物の存在する空間において、電波,光,超音波もしくは音波を利用する通信装置間の直線距離を正確に取得することが困難であり,その結果,座標値が未知の可動物体の座標値を正確に算出することが困難である。
【0009】
そこで,本発明は,任意の障害物が存在する環境において,座標値が未知の可動物体の正確な座標値を得る方法の提供を目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため、本願で開示する発明の概要を説明すれば以下の通りである。
【0011】
本願請求項1に記載の発明は、互いの相対位置が既知である第1乃至第4の粒子線検出装置と、前記第1乃至第4粒子線検出装置に対して相対位置が未知である第5粒子線検出装置と、前記第1乃至第5粒子線検出装置に接続された位置計算部と、前記位置計算部に接続されたクロックと、を有する測位システムであって、前記位置計算部はさらに、前記第1乃至第5粒子線検出装置からの受信信号と前記クロックからのクロック信号とを用い前記受信信号に時刻情報を付与するイベント情報生成部と、前記時刻情報から一定の時間範囲にある前記受信信号に対して関連付け処理を行う同時性比較部と、前記関連付け処理の情報から前記第1粒子線検出装置と前記第5粒子線検出装置との相対位置を算出する座標算出部と、を有することを特徴とする測位システムである。
【発明の効果】
【0012】
本発明によれば、電波、光、超音波もしくは音波が遮蔽、反射、回折、屈折しうる環境においても、測位可能とし、高確度な座標値を算出できる測位システムを提供することができる。
【図面の簡単な説明】
【0013】
【図1】従来の電波、光、超音波もしくは音波の直接波の行程距離を利用した測位システムの測位原理を示す図である。
【図2】従来の測位システムが障害物により測位不能となる場合を示す図である。
【図3】従来の測位システムが障害物により正しく測位できない場合を示す図である。
【図4】本発明の一実施形態の測位システムの構成を示す図である。
【図5】本発明の一実施形態のミュオン検出ノードの構成を示す図である。
【図6】本発明の一実施形態の測位サーバの構成を示す図である。
【図7】本発明の一実施形態のイベント情報テーブルの例を示す図である。
【図8】本発明の一実施形態の軌跡情報テーブルの例を示す図である。
【図9】本発明の一実施形態のノード座標情報テーブルの例を示す図である。
【図10】本発明の一実施形態の測位サーバがミュオン飛来イベント情報を受信した際のフローチャートである。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態について図面を用いて説明する。
【0015】
図4は、本発明の一実施形態の測位システムの構成を示す図である。本実施形態の測位システム10は、有限空間11内に配置された5個以上のミュオン検出ノード20と、通信手段30と、測位サーバ40と、表示装置70を構成要素として含む。
【0016】
有限空間11は、長さを限定するわけではないが、例えば一辺の長さが100mの立方体である。これらのミュオン検出ノード20には、移動せず座標値が既知のノード(以後、不動ノードと表記する)が4個以上、可動物体に搭載され座標値が未知のノード(以後、可動ノードと表記する)が1個以上含まれる。
【0017】
二次宇宙線ミュオンは、天然放射線の一種であり、陽子や種々の原子核を主な成分とする一次宇宙線が、地球の大気上層部の大気中の原子核と衝突し、核反応をカスケード状に起こした結果発生し、地表に達する高エネルギーの素粒子であり、太陽光のように日常的に地表に飛来している。
【0018】
一般にミュオンは、電磁気力による相互作用をもつが、核力(強い相互作用)をもたないため、透過性と直進性が極めて高い。また、電荷をもつ粒子であるため、シンチレータの発光現象を利用することで、容易に検出可能である。
【0019】
図4に例示したミュオン軌跡M1は、1個のミュオンの軌跡を示している。このミュオンは、上空から有限空間11に入射し、まず不動ノード20aを貫通する。次に、可動ノード20uと不動ノード20bを順次貫通し、その後有限空間11を離れる。
【0020】
一般に二次宇宙線ミュオンのエネルギは10MeVからGeVの高いオーダーにあるため、この一連の過程におけるミュオンの進行方向の変化は無視できる。そのため、ミュオン検出ノード20a、20u、20bを同一のミュオンが貫通した事実を検出することにより、この3個のノードが直線状に位置している事実を検出できる。
【0021】
同様に、ミュオン軌跡M2が、不動ノード20c、可動ノード20u、不動ノード20dを貫通している事実から、この3個のノードが直線状に位置している事実を検出できる。一方、不動ノード20a、20b、20c、20dの座標値は既知であることから、幾何学的連立方程式を解くことで、可動ノード20uの未知の座標値を算出することができる。
【0022】
このとき算出される座標値はシンチレータのサイズに応じた値となる。したがって、シンチレータのサイズをより小さくすることで、可動ノードが得たい座標値の分解能を向上させることができる。
【0023】
また、図4のように不動ノード20a、20bが配置される平面または不動ノード20c、20d配置される平面がある場合、可動ノード20uとこれらの平面との距離(平面に対して法線方向の距離)を事前に入手できればミュオン軌跡M1のみでも可動ノード20uの未知の座標値を算出することができる。このように、事前に得られる他の情報を組み合わせることで、計算処理負荷の低減や確度向上を図ることもできる。
【0024】
また、図4では不動ノード20a、20bが配置される平面と不動ノード20c、20d配置される平面との中間に可動ノード20uがある状態を表している。しかしながら、本願はこれに限定されるわけではなく、可動ノード20uが中間にない場合でも、幾何学的連立方程式を解くことで位置を特定できる。
【0025】
図5は、測位システム10におけるミュオン検出ノード20の構成を示す図である。ミュオン検出ノード20は、検出部21と、制御部22と、電源部23を構成要素として含む。
【0026】
検出部21は、地面に水平に配置された2枚の平板状のシンチレータ211と、シールド212と、2個の光検出器213と、2個の導光器214を構成要素として含み、制御部22は、コインシデンス回路221と、時計222と、計算機223と、記憶装置224と、通信装置225を構成要素として含む。
【0027】
シンチレータ211は、ミュオンを含む放射線が通過した際に蛍光する性質を有する。シンチレータ211の材質は、例えばヨウ化ナトリウム(NaI)が適している。ヨウ化ナトリウムはミュオンに対して良好な発光強度を得られる利点があるが、潮解性を有する。したがって、発光強度や他の特性を考慮し、有限空間ごとに適切な材質を選択しても良い。特にサイズを限定するわけではないが、本実施例のシンチレータ211の厚さは20mm、長さ100mm、幅100mmで、2枚のシンチレータの間隔は10mmである。
【0028】
シールド212は、二次宇宙線ミュオン以外の放射線および環境光がシンチレータ211および導光器214に進入することを防ぐために、シンチレータ211および導光器14を外部表面を覆う。これにより、ミュオンに起因するシンチレーションのみを観測することができるのでミュオン検出の信頼性が向上する。
【0029】
導光器214は、シンチレータ211における蛍光を光検出器213に導く。光検出器213は、光を電気信号に変換する機能を有する。光検出器213には、例えば光電子増倍管が適している。
【0030】
二次宇宙線ミュオンの飛来以外にも、熱雑音の影響により光検出器213から信号が伝達される可能性があるため、コインシデンス回路221は、2個の光検出器213から同時に信号が出力されたか否かを比較し、同時とみなされた場合にのみ、計算機223に信号を伝達する。これにより、ミュオン飛来イベントのみが計算機223に伝達される。
【0031】
ここでいう、同時とみなされる場合とは、二次宇宙線ミュオンの一般的な速度を基に、2枚のシンチレータ211を通過するために必要な時間が考慮されている。
【0032】
計算機223は、コインシデンス回路221から信号が伝達された時刻を、時計222から取得し、記憶装置224に追加登録する。計算機223は、通信装置225が送信可能か否かを常に監視し、送信可能の場合には、記憶装置224に登録されている時刻情報を、ミュオン検出ノード20のIDとともに、イベント情報519として通信手段30を介して測位サーバ40に伝達する。計算機223は、送信が完了した時刻情報を記憶装置224から削除する。
【0033】
電源部23は、光検出器213と、コインシデンス回路221と、時計222と、計算機223と、記憶装置224と、通信装置225に必要な電力を供給する。通信手段30は、ミュオン検出ノード20と、測位サーバ40との間の通信を実現する。ミュオン検出ノード20が測位対象の可動物体に搭載されている場合は、無線通信が適している。ミュオン検出ノード20が、位置が既知で固定されている場合は、有線通信が適している。
【0034】
図6は、測位システム10における測位サーバ40の構成を示す図である。測位サーバ40は、通信装置41と、計算機42と、記憶装置43と、表示装置インターフェース44と、電源部45を構成要素として含む。計算機42は、同時性比較部421と、軌跡算出部422と、座標算出部423を構成要素として含む。
【0035】
記憶装置43は、イベント記憶部431と、軌跡記憶部432と、ノード座標記憶部433を構成要素として含む。電源部45は,通信装置41と,計算機42と,記憶装置43と,表示装置インターフェース44とに必要な電力を供給する。
【0036】
図7は、イベント記憶部431に格納されるイベント情報テーブル51の例を示す図である。イベント情報テーブル51は、イベント情報519の集合である。1組のイベント情報519は、1個のミュオン飛来イベントに対応しており、ミュオン飛来時刻511、ミュオン検出ノードID512を含む。
【0037】
図8は、軌跡記憶部432に格納される軌跡情報テーブル52の例を示す図である。軌跡情報テーブル52は、軌跡情報529の集合である。1組の軌跡情報529は、1本の直線状のミュオン軌跡に対応しており、ミュオン飛来時刻521、1個の可動ノードのID522u,2個の不動ノードのID522a,522bを含む。
【0038】
図9は、ノード座標記憶部433に格納されるノード座標情報テーブル53の例を示す図である。ノード座標情報テーブル53は、ノード座標情報539の集合である。1組のノード座標情報539は、1個のミュオン検出ノード20に対応しており、ミュオン検出ノードID531、可動性532、座標値533を含む。
【0039】
図10は,測位サーバ40がミュオン検出ノード20からミュオン飛来イベント情報を受信した際のフローチャートである。
【0040】
通信装置41が、ミュオン検出ノード20から伝達されたイベント情報519を受信すると、計算機42は、イベント記憶部431のイベント情報テーブル51にそのイベント情報519を追加登録する(s601)。
【0041】
同時性比較部421は、イベント情報テーブル51を検索し,新規イベント情報519の時刻と同時とみなされる時刻が記載された既登録イベント情報を列挙する(s602)。
【0042】
ここでいう、同時とみなされる時刻とは、2つの不動ノードと1つの可動ノードとのミュオン飛来時刻が一定の時間範囲内にあるかで判断している。一定の時間範囲とは、二次宇宙線ミュオンの一般的な速度を基に2つの不動ノードと1つの可動ノードとを通過するために必要な時間が考慮されている。
【0043】
計算機42は,列挙されたイベント情報519のうち,2個ずつに着目するループを開始する(s603)。
【0044】
軌跡算出部422は,着目している2個のイベント情報519と,新規イベント情報の3個から,新規に軌跡情報529を算出する(s604)。
【0045】
軌跡算出部422は,前記新規軌跡情報529を,軌跡記憶部432の軌跡情報テーブル52に追加登録する(s605)。
【0046】
軌跡算出部422は,軌跡情報テーブル52を検索し,前記新規イベント情報519の時刻の前後のある一定の時間範囲内の時刻が記された軌跡情報529を列挙する(s606)。
【0047】
計算機42は,列挙された軌跡情報529のうち,1個に着目するループを開始する(s607)。
【0048】
座標算出部423は,着目している軌跡情報529と,前記新規軌跡情報529を基に,ノード座標記憶部433のノード座標情報テーブル53を適宜参照し,両軌跡に含まれる可動ノードの座標値の算出を試みる(s608)。
【0049】
可動ノードの座標値が新たに算出された場合は,座標算出部423は,ノード座標情報テーブル53の該当箇所を更新する(s609)。
【0050】
計算機42は,次の軌跡情報529に着目し,処理をステップs608に戻す(s610)。
【0051】
着目すべき軌跡情報529が無くなった際には,計算機42は,次のイベント情報2個の組み合わせに着目し,処理をステップs604に戻す(s611)。
【0052】
着目すべきイベント情報2個の組み合わせが無くなった際には,計算機42は,表示装置インターフェース44を介して表示装置70にノード座標記憶部433に格納された全ての可動ノードの座標値を伝達し,予め用意されたフロアマップ等の上に可動物体の位置を重畳表示する(s612)。
【0053】
なお,本実施例において,ミュオン検出ノード20はミュオン飛来イベントのみを検出する機能を備えるが,単一のシンチレータに複数の光検出器を接続し,各光検出器で検出された光の強度を比較することで,ミュオンの通過点をシンチレータ内で特定する機能を備えても良い。このような構成をとることで、複数のシンチレータを並べる必要がなくなり、検出面積を減少させることなくミュオン検出ノード数を減らすことができる。
【符号の説明】
【0054】
10 測位システム
11 有限空間
20a、20b、20c、20d 不動ノード
20u 可動ノード
30 通信手段
40 測位サーバ
70 表示装置
【特許請求の範囲】
【請求項1】
互いの相対位置が既知である第1乃至第4の粒子線検出装置と、
前記第1乃至第4粒子線検出装置に対して相対位置が未知である第5粒子線検出装置と、
前記第1乃至第5粒子線検出装置に接続された位置計算部と、
前記位置計算部に接続されたクロックと、
を有する測位システムであって、
前記位置計算部はさらに、
前記第1乃至第5粒子線検出装置からの受信信号と前記クロックからのクロック信号とを用い前記受信信号に時刻情報を付与するイベント情報生成部と、
前記時刻情報から一定の時間範囲にある前記受信信号に対して関連付け処理を行う同時性比較部と、
前記関連付け処理の情報から前記第1粒子線検出装置と前記第5粒子線検出装置との相対位置を算出する座標算出部と、
を有する測位システム。
【請求項2】
請求項1に記載の前記測位システムにおいて、
前記粒子線検出装置は、
ミュオンにより発光する第1シンチレータと、
前記第1シンチレータに光学的に接続された第1導光器と、
前記第1導光器と光学的に接続された第1光検出器と、
を有する測位システム。
【請求項3】
請求項2に記載の前記測位システムにおいて、
前記粒子線検出装置はさらに、
ミュオンにより発光する第2シンチレータと、
前記第2シンチレータに光学的に接続された第2導光器と、
前記第2導光器と光学的に接続された第2光検出器と、
前記第1及び第2光検出器に接続され、前記第1及び第2光検出器から受信する検出信号のタイミングを比較するコインシデンス回路と、
を有する測位システム。
【請求項4】
請求項3に記載の前記測位システムにおいて、
前記粒子線検出装置は、
前記第1及び第2シンチレータと前記第1及び第2導光器との外部表面を覆うシールド
を有する測位システム。
【請求項5】
請求項1に記載の前記測位システムにおいて
前記関連付け処理は、前記同時性比較部が、
前記第1粒子線検出装置と前記第2粒子線検出装置と前記第5粒子線検出装置とが粒子線を検出した時刻を比較する処理と、
前記第3粒子線検出装置と前記第4粒子線検出装置と前記第5粒子線検出装置とが粒子線を検出した時刻を比較する処理と、
を行うことを特徴とする測位システム。
【請求項6】
有限空間内に少なくとも5個配置されているミュオン検出ノードと,
前記ミュオン検出ノードと通信手段により接続された測位サーバとを備えた測位システムであって、
前記ミュオン検出ノードの少なくとも1個は位置が固定されておらず、
前記ミュオン検出ノードの少なくとも4個は位置が固定されており、かつ、その座標値が既知であり、
前記ミュオン検出ノードはシンチレータと導光器と光検出器とコインシデンス回路と時計と計算機とを有し、
前記測位サーバは前記ミュオン検出ノードによって検出されたミュオン飛来イベントの時刻情報と該ミュオン検出ノードのIDとの組み合わせであるイベント情報を記憶し、
前記測位サーバは前記イベント情報に基づいてミュオン軌跡情報を算出し、
前記測位サーバは前記ミュオン軌跡情報を基に位置が固定されていない前記ミュオン検出ノードの座標値を算出することを特徴とする測位システム。
【請求項1】
互いの相対位置が既知である第1乃至第4の粒子線検出装置と、
前記第1乃至第4粒子線検出装置に対して相対位置が未知である第5粒子線検出装置と、
前記第1乃至第5粒子線検出装置に接続された位置計算部と、
前記位置計算部に接続されたクロックと、
を有する測位システムであって、
前記位置計算部はさらに、
前記第1乃至第5粒子線検出装置からの受信信号と前記クロックからのクロック信号とを用い前記受信信号に時刻情報を付与するイベント情報生成部と、
前記時刻情報から一定の時間範囲にある前記受信信号に対して関連付け処理を行う同時性比較部と、
前記関連付け処理の情報から前記第1粒子線検出装置と前記第5粒子線検出装置との相対位置を算出する座標算出部と、
を有する測位システム。
【請求項2】
請求項1に記載の前記測位システムにおいて、
前記粒子線検出装置は、
ミュオンにより発光する第1シンチレータと、
前記第1シンチレータに光学的に接続された第1導光器と、
前記第1導光器と光学的に接続された第1光検出器と、
を有する測位システム。
【請求項3】
請求項2に記載の前記測位システムにおいて、
前記粒子線検出装置はさらに、
ミュオンにより発光する第2シンチレータと、
前記第2シンチレータに光学的に接続された第2導光器と、
前記第2導光器と光学的に接続された第2光検出器と、
前記第1及び第2光検出器に接続され、前記第1及び第2光検出器から受信する検出信号のタイミングを比較するコインシデンス回路と、
を有する測位システム。
【請求項4】
請求項3に記載の前記測位システムにおいて、
前記粒子線検出装置は、
前記第1及び第2シンチレータと前記第1及び第2導光器との外部表面を覆うシールド
を有する測位システム。
【請求項5】
請求項1に記載の前記測位システムにおいて
前記関連付け処理は、前記同時性比較部が、
前記第1粒子線検出装置と前記第2粒子線検出装置と前記第5粒子線検出装置とが粒子線を検出した時刻を比較する処理と、
前記第3粒子線検出装置と前記第4粒子線検出装置と前記第5粒子線検出装置とが粒子線を検出した時刻を比較する処理と、
を行うことを特徴とする測位システム。
【請求項6】
有限空間内に少なくとも5個配置されているミュオン検出ノードと,
前記ミュオン検出ノードと通信手段により接続された測位サーバとを備えた測位システムであって、
前記ミュオン検出ノードの少なくとも1個は位置が固定されておらず、
前記ミュオン検出ノードの少なくとも4個は位置が固定されており、かつ、その座標値が既知であり、
前記ミュオン検出ノードはシンチレータと導光器と光検出器とコインシデンス回路と時計と計算機とを有し、
前記測位サーバは前記ミュオン検出ノードによって検出されたミュオン飛来イベントの時刻情報と該ミュオン検出ノードのIDとの組み合わせであるイベント情報を記憶し、
前記測位サーバは前記イベント情報に基づいてミュオン軌跡情報を算出し、
前記測位サーバは前記ミュオン軌跡情報を基に位置が固定されていない前記ミュオン検出ノードの座標値を算出することを特徴とする測位システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−58041(P2012−58041A)
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願番号】特願2010−200444(P2010−200444)
【出願日】平成22年9月8日(2010.9.8)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願日】平成22年9月8日(2010.9.8)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]