
測位信号追尾処理装置および測位装置
【課題】C/Noによるコード追尾結果やキャリア周波数追尾結果への影響を抑制し、高精度なコード、キャリア周波数追尾ができる簡素な構成の測位信号復調装置を実現する。
【解決手段】測位信号のサーチに成功すると、復調部13は、まずコード追尾部33のみを動作して、コード追尾部のみを行い、コードの合わせ込みを行う。この際、C/No測定部36は、相関処理後の逆拡散信号のC/Noを逐次測定し、追尾処理制御部37へ与える。追尾処理制御部37は、逐次入力されるC/Noに基づいてコード追尾のみの状態からコード追尾とキャリア追尾とを並行して行う状態への切替タイミングを決定する。切替タイミングに達すると、コード追尾部33とキャリア追尾部34とを連結し、コードとキャリア周波数の同時追尾を行う。この際、キャリア追尾部34のキャリア周波数の初期値は、コード追尾部33により積算されたコードドップラの積算値が与えられる。
【解決手段】測位信号のサーチに成功すると、復調部13は、まずコード追尾部33のみを動作して、コード追尾部のみを行い、コードの合わせ込みを行う。この際、C/No測定部36は、相関処理後の逆拡散信号のC/Noを逐次測定し、追尾処理制御部37へ与える。追尾処理制御部37は、逐次入力されるC/Noに基づいてコード追尾のみの状態からコード追尾とキャリア追尾とを並行して行う状態への切替タイミングを決定する。切替タイミングに達すると、コード追尾部33とキャリア追尾部34とを連結し、コードとキャリア周波数の同時追尾を行う。この際、キャリア追尾部34のキャリア周波数の初期値は、コード追尾部33により積算されたコードドップラの積算値が与えられる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、測位信号の復調を行うために、測位信号のキャリア周波数およびコードの追尾を行う装置に関するものである。
【背景技術】
【0002】
従来、GPS受信機等のGNSS受信機では、測位等を行うために擬似距離やドップラ周波数を測定する必要がある。そして、当該擬似距離やドップラ周波数を測定するためには、測位信号の捕捉(サーチ)と追尾を行わなければならない。特に、擬似距離やドップラ周波数を高精度に測定するためには、コード追尾とキャリア周波数追尾との両方を行わなければならない。
【0003】
ところが、このようなGNSS受信機では、測位信号の捕捉時の状態によっては、追尾状態に入ってからキャリア周波数を追い込んでロックする過程で、十分な追い込みができなかったり、間違ったキャリア周波数にロックしてしまうという異常追尾現象が生じる。例えば、図6に示すような異常追尾が生じることがある。
【0004】
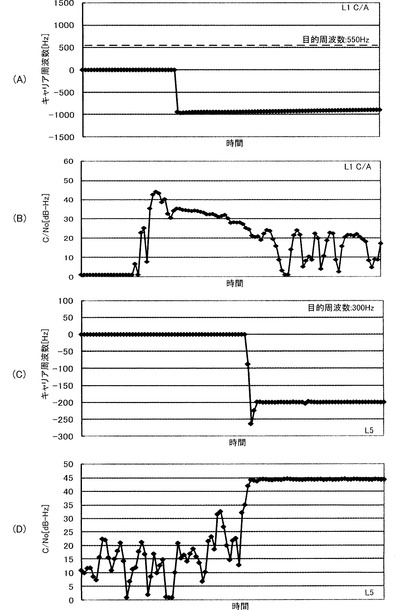
図6(A),(B)は、GPSのL1波のC/Aコードに関する異常追尾が生じた場合のキャリア周波数推移状況およびC/No(搬送波電力対雑音電力密度比)推移状況のシミュレーション結果を示す図であり、図6(C),(D)は、GPSのL5波のIコードに関する異常追尾が生じた場合のキャリア周波数推移状況およびC/No推移状況シミュレーション結果を示す図である。
【0005】
図6(A),(B)では、L1波C/Aコードに対して、捕捉時のベースバンド変換後におけるキャリア周波数が0[Hz]、目的周波数が500[Hz]、理想的に追尾できた際のC/Noが50[dB−Hz]である場合を示す。このような条件、すなわち、目的周波数に対して550Hzの周波数ズレがある状態で追尾を開始した場合、この追尾によって推定されるキャリア周波数は−1000[Hz]、すなわち周波数ズレが約1.5[kHz]になり、C/Noが低いまま推移する。このため、定常追尾に至ることができない。
【0006】
図6(C),(D)では、L5波Iコードに対して、捕捉時のベースバンド変換後におけるキャリア周波数が0[Hz]、目的周波数が500[Hz]、理想的に追尾できた際のC/Noが50[dB−Hz]である場合を示す。このような条件、すなわち、目的周波数に対して300Hzの周波数ズレがある状態で追尾を開始した場合、この追尾によって推定されるキャリア周波数は−200[Hz]、すなわち周波数ズレが500[Hz]になり、C/Noは高い値となる。これにより、間違ったキャリア周波数でロックされて追尾が行われてしまう。
【0007】
このような問題を解決する方法として、サーチを行った後にコード追尾を行い、コード位相差が十分に小さくなったことを確認してから、所定時間長(例えば1秒間)等のコード位相差を観測し、当該コード位相差の最小自乗値からキャリア周波数の初期値を推定し、当該初期値からキャリア周波数を追尾する方法が考えられている。さらには、特許文献1には、1つの測位衛星(測位信号)に対して複数チャンネルを用い、ピークサーチ、当該ピークに対応するサイドローブチェック、ピーク値のキャリア周波数確認を行うことで、正確なキャリア周波数を絞り込んでいく方法も考えられている。
【特許文献1】特開2004−12378号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上述の最小自乗法を用いる方法の場合、1つの測位衛星(測位信号)に対して1チャンネルを割り当てればよいが、最小自乗法を使用するため、演算処理量が多くなり、処理負荷が大きくなる。また、最小自乗法を行うためのサンプリング時間がC/Noに関係なく一定であるので、高精度なコード追尾やキャリア周波数追尾を行うための処理を、C/Noすなわち受信環境に応じて柔軟に適用させることができず、C/Noによっては高精度な追尾ができない可能性もある。
【0009】
また、特許文献1に示すような方法では、1つの測位衛星(測位信号)に対して2チャンネルを必要とするので、リソースを多く必要としてしまう。
【0010】
このような各問題を鑑みて、本発明の目的は、C/Noによるコード追尾結果やキャリア周波数追尾結果への影響を抑制し、高精度なコード、キャリア周波数追尾ができる簡素な構成の測位信号追尾処理装置を実現することにある。
【課題を解決するための手段】
【0011】
この発明は、測位信号に基づいてキャリア周波数の追尾を行うキャリア追尾部と、測位信号に基づいてコードの追尾を行うコード追尾部とを備えた測位信号追尾処理装置に関するものである。この測位信号追尾処理装置は、C/No推定手段と、キャリア周波数推定手段と、推定時間決定手段とを備える。C/No推定手段は、所定の相関処理がされた測位信号のC/Noを推定する。キャリア周波数推定手段は、コード追尾部内に備えられており、コード追尾部で検出されるコードドップラ成分に基づいて所定時間に亘りキャリア周波数を推定する。推定時間決定手段は、キャリア周波数を推定する所定時間を、C/Noに基づいて決定する。そして、キャリア追尾部は、キャリア周波数推定手段により推定されたキャリア周波数を初期値として該キャリア周波数の追尾を行う。
【0012】
この構成では、コード追尾部では、コードの追尾処理とともに、キャリア周波数推定手段で、コードドップラ成分からキャリア周波数が継続的に推定される。追尾されているコードは順次測位信号との相関処理に利用され、相関処理後の信号は、C/No推定手段によりC/Noが逐次推定される。推定時間決定手段は、C/Noに基づいてキャリア周波数推定手段でのキャリア周波数推定時間を決定する。そして、決定された推定時間に達すると、キャリア周波数推定手段で推定されたキャリア周波数が初期値としてキャリア追尾部へ与えられ、キャリア追尾が実行される。これにより、キャリア追尾部へは、コード追尾部で精度が向上したキャリア周波数が初期値として入力される。
【0013】
また、この発明の測位信号追尾処理装置の推定時間決定手段は、キャリア周波数を推定する所定時間をC/Noが良くなるほど短くする。
【0014】
この構成では、C/Noが元々良ければ、すなわち受信環境が良好であれば、早くキャリア周波数が推定される。また、コード追尾の開始当初ではC/Noが悪くても、コードが合わせ込まれてC/Noが良くなるほど、キャリア周波数の推定時間が早く短くなっていく。これにより、C/Noの状況に応じて最適な推定時間が決定される。
【0015】
また、この発明の測位信号追尾処理装置の推定時間決定手段は、C/Noが良くなるほど短くなる遷移時間を設定する。そして、推定時間決定手段は、遷移時間の逆数を予め設定したタイミング毎に積算していき、当該積算値が所定値に達するまでの時間を、キャリア周波数を推定する所定時間とする。
【0016】
この構成では、C/Noに基づく遷移時間の逆数の積算処理のみでキャリア周波数の推定時間が決定される。これにより、C/Noの推移により変化するキャリア周波数の推定時間が簡素な処理で決定される。
【0017】
また、この発明の測位信号追尾処理装置の推定時間決定手段は、C/Noを予め設定したタイミング毎に積算していき、当該積算値が所定値に達するまでの時間を、キャリア周波数を推定する所定時間とする。
【0018】
この構成では、C/Noの積算値を推定時間の決定基準とすることで、遷移時間を用いずとも、キャリア周波数の推定時間が算出される。
【0019】
また、この発明の測位信号追尾処理装置のコード追尾部は、コード位相差検出部を含む。コード位相差検出部は、測位信号に重畳するコードとコードNCOにより生成されるレプリカコードとのコード位相差を検出する。測位信号追尾処理装置のコード位相差検出部の出力側には、それぞれ異なるゲインを有する増幅器を備えた第1の系、第2の系が備えられており、該第2の系には、コード位相のコードドップラ成分を所定時間に亘り積算する前記積算器が挿入されている。このような構成において、具体的に、キャリア周波数推定手段は、コード位相差検出部、第2の系の増幅器、第2の系の積算器からなる。そして、キャリア追尾部は、積算器から出力される値に基づいたキャリア周波数を初期値として該キャリア周波数の追尾を行う。
【0020】
この構成では、上述のキャリア周波数推定手段の具体的な構成を示すものであり、この構成により、キャリア周波数推定手段は、コード追尾部に必須のコード位相差検出部と、コード追尾のためのフィードバックループに一般的に設置される増幅器や積算器とから構成される。特に増幅器や積算器は一般的な回路であるので、キャリア周波数推定手段が汎用の簡素な回路構成で実現される。
【0021】
また、この発明の測位装置は、復調部、航法メッセージ取得部、および測位部を備える。復調部は、上述の測位信号追尾処理装置を有し、追尾しているコードのコード位相差やキャリア周波数に基づいて擬似距離を算出する。航法メッセージ取得部は、復調部で復調された測位信号から航法メッセージを取得する。測位部は、擬似距離と航法メッセージとを用いて測位演算を行う。
【0022】
この構成では、上述のようにコードやキャリア周波数が確実且つ高精度に追尾されるので、擬似距離を高精度に取得することができる。これにより、高精度な測位演算が可能になる。
【発明の効果】
【0023】
この発明によれば、複雑且つ演算量の多い処理を行わなくても、簡素な構成で且つ簡素な演算処理で、C/Noによる追尾精度への影響を抑制して、確実且つ高精度にコード追尾およびキャリア周波数追尾を行うことができる。
【発明を実施するための最良の形態】
【0024】
本発明の実施形態に係る測位信号追尾処理装置の構成について、図を参照して説明する。なお、以下の説明では、GPSの場合を例として説明を行うが、Galileo等のGNSSの他のシステムにおける測位信号追尾処理装置に対しても、以下の構成を適用することができる。
【0025】
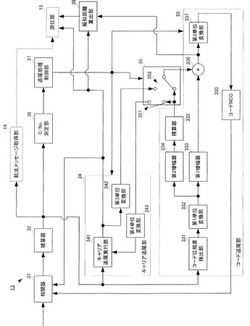
図1は本実施形態の測位信号追尾処理装置を備える復調部を含む測位装置の概略構成を示すブロック図である。
【0026】
測位装置は、測位信号受信アンテナ11、ダウンコンバータ12、本発明の測位信号追尾処理装置を含む復調部13、航法メッセージ取得部14、測位部15を備える。測位信号受信アンテナ11は、測位衛星から送信される測位用の電波信号を受信して、電気信号変換した測位信号をダウンコンバータ12へ出力する。測位信号は、所定周波数からなる搬送波(例えば、GPSのL1波であれば1575.42MHz等)を、測位衛星毎に設定されたコードと航法メッセージによりスペクトル拡散した信号である。ダウンコンバータ12は、測位信号の周波数をダウンコンバートして、所定周波数からなる中間周波数信号(以下、「IF信号」と称する。)を生成し、復調部13へ与える。
【0027】
復調部13は、スペクトル拡散されたIF信号に対してキャリア相関およびコード相関を行い、これら相関処理後の信号を所定時間長に亘り積算することで、逆拡散を行う。ここで、キャリア相関とコード相関とが高精度に行われていれば、この逆拡散信号には航法メッセージのみが重畳された状態になる。
【0028】
復調部13は、まず信号捕捉(サーチ)を行うことで、コードとキャリア周波数の粗調整を行う。復調部13は、C/Noがサーチ用閾値を超えた時点で、コード追尾のみを行う単独コード追尾ループ処理を実行する。この際、復調部13は、キャリア相関用にはサーチ終了時点で設定されているキャリア周波数を用い、キャリア追尾を行わない。次に、復調部13は、単独コード追尾ループでのコードの合わせ込みが成功すると、コード追尾とキャリア追尾とを同時・並行して行う連結型コード・キャリア追尾ループ処理(位相同期型DLL処理に対応する。)を実行する。この際、キャリア追尾部34には、コード追尾部33による単独コード追尾ループで得られたコードドップラの積算値が与えられる。そして、復調部13は、連結型コード・キャリア追尾ループによりコード追尾およびキャリア周波数追尾を実行していき、定常追尾に成功すると、得られたコード及びキャリア周波数によってIF信号を逆拡散処理して航法メッセージ取得部14へ与えるとともに、得られたコード及びキャリア周波数情報から擬似距離等を算出して測位部15へ与える。
【0029】
航法メッセージ取得部14は、復調部13からの航法メッセージが重畳された逆拡散信号に基づいて航法メッセージを取得し、測位部15に与える。
【0030】
測位部15は、航法メッセージ取得部14からの航法メッセージと、復調部13からの擬似距離やキャリア周波数情報等に基づいて測位演算を行い、測位装置の位置を算出する。
【0031】
次に、本発明の特徴部である復調部13の構成について、図2、図3を参照して具体的に説明する。
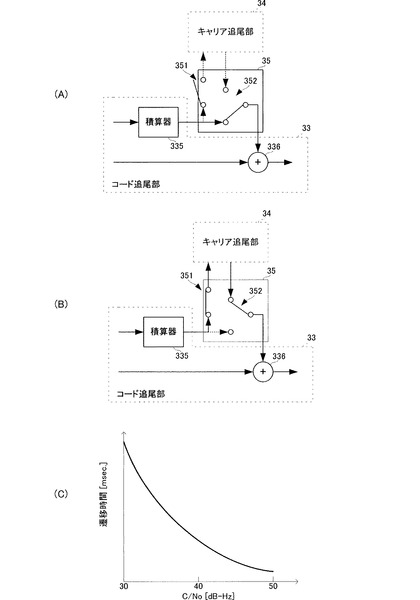
図2は図1に示す復調部13の主要構成を示すブロック図である。また、図3(A),(B)は図2に示す切替回路35の切替動作を説明するための図であり、図3(C)は遷移時間TのC/No特性を示す1つのモデルを表したグラフである。
【0032】
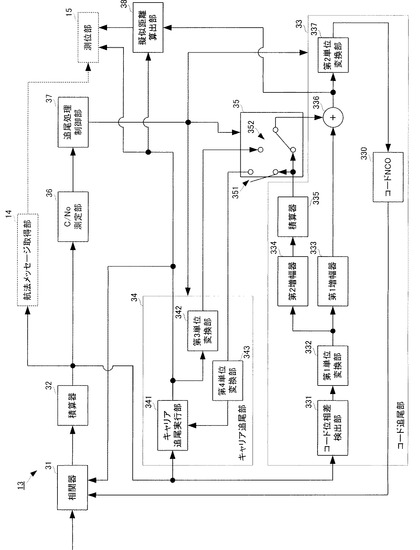
復調部13は、相関器31、積算器32、コード追尾部33、キャリア追尾部34、切替回路35、C/No測定部36、追尾処理制御部37、および擬似距離算出部38を備える。
【0033】
相関器31は、上述のようにIF信号に対して相関処理を行う。相関器31は、キャリア相関器と、コード相関器と、レプリカキャリア周波数信号生成部と、レプリカコード信号生成部とを備える。
【0034】
信号捕捉時には、相関器31は、既知のサーチ用コード・キャリア周波数生成手法によりレプリカキャリア周波数信号およびレプリカコード信号を生成し、キャリア相関器およびコード相関器で相関を行い、信号の捕捉(サーチ)を行う。そして、相関器31は、予め設定したサーチ用のC/Noの閾値を超えたことを検出すると、追尾用の相関処理に切り替える。
【0035】
追尾用の相関処理は、単独コード追尾ループ処理と連結型コード・キャリア追尾ループ処理とで異なる。単独コード追尾ループ処理の場合、相関器31は、コード追尾部33から出力されたコード情報に基づいてレプリカコード信号を生成し、サーチ終了時点でのキャリア周波数に基づいてレプリカキャリア周波数信号を生成する。一方、連結型コード・キャリア追尾ループの場合、相関器31は、コード追尾部33から出力されたコード情報に基づいてレプリカコード信号を生成し、キャリア追尾部34から出力されたキャリア周波数情報に基づいてレプリカキャリア周波数信号を生成する。
【0036】
相関器31のキャリア相関器はIF信号とレプリカキャリア周波数信号との相関処理を行い、コード相関器はキャリア相関後のIF信号とレプリカコード信号との相関処理を行う。
【0037】
積算器32は、上述のように相関処理後のIF信号を所定時間長、例えば1[msec.]に亘り積算することで、逆拡散信号を生成する。逆拡散信号は、航法メッセージ取得部14へ与えられるとともに、コード追尾部33、キャリア追尾部34、C/No測定部36へも与えられる。
【0038】
C/No測定部36は、積算器32から出力される逆拡散信号のC/No(搬送波電力対雑音電力密度比)を順次測定して追尾処理制御部37へ与える。
【0039】
本発明の切替タイミング指示手段に相当する追尾処理制御部37は、取得したC/Noに基づいて、切替回路35への切替制御信号を与えるタイミングを設定するための遷移時間Tを決定する。ここで、遷移時間Tは、図3(C)に示すように、C/Noが高くなる、すなわち雑音が少なくC/Noが良くなるほど短く設定されており、C/Noが低くなる、すなわち雑音が多くC/Noが悪くなるほど長く設定されている。さらに、遷移時間Tは、C/Noに対して負の指数関数的に短くなるように設定されている。例えば、追尾処理制御部37は、このように決定された遷移時間Tの逆数(1/T)を、予め設定した等時間間隔からなる単位時間毎に積算していく。そして、追尾処理制御部37は、当該積算結果が所定閾値に達した時点を切替タイミングと判定して、切替制御信号を切替回路35へ与える。このように、遷移時間Tを決定して切替タイミングを算出することで、C/Noが高ければ、コード追尾部33による単独コード追尾ループから、コード追尾部33とキャリア追尾部34とが連動してなる連結型コード・キャリア追尾ループへの切替タイミングを早くすることができる。一方で、C/Noが低ければ、単独コード追尾ループから連結型コード・キャリア追尾ループへの切替タイミングを遅くすることができる。さらに、C/Noが低い状態から高くなる速度が速ければ、C/Noが高くなる速度が遅い場合よりも、単独コード追尾ループから連結型コード・キャリア追尾ループへの切替タイミングを早くすることができる。この際、C/Noが低くなるほど単独コード追尾ループの実行時間長が長くなるので、サーチの閾値を超えるレベルを有するC/Noであれば、C/Noに影響されることなく、確実に高精度なコード追尾を行うことができる。
【0040】
なお、追尾処理制御部37は、C/No測定部36から与えられるC/Noを逐次積算して、この積算された値が所定閾値に達した時点を切替タイミングと判定してもよい。
【0041】
コード追尾部33は、コードNCO330、コード位相差検出部331、第1単位変換部332、第1増幅器333、第2増幅器334、積算器335、加算器336、第2単位変換部337を備える。
【0042】
コード位相差検出部331は、逆拡散信号に含まれるコード位相差、すなわち、コードNCO330のコード情報に基づいて生成されたレプリカコード信号とIF信号とのコード位相差を検出して、第1単位変換部332へ与える。第1単位変換部332は、コードチップ単位を基準にしたコード位相差から、時間単位のコード位相差に単位変換して、第1増幅器333および第2増幅器334へ出力する。
【0043】
第1増幅器333は、コード位相のベースバンド成分を出力し、第2増幅器334はコード位相に対するコードドップラ成分を出力するようにゲイン設定される。この際、第1増幅器333および第2増幅器334は、各タイミングでのC/Noに応じた帯域幅で設定される。第1増幅器333から得られたコード位相差は、加算器336に入力される。一方、第2増幅器334から得られたコード位相差は、積算器335へ入力される。
【0044】
積算器335は、第2増幅器334から得られたコード位相差を順次積算していく。ここで、積算器335に積算されていくコード位相差は、測位衛星の移動等により生じるコードドップラ成分であるので、これらを積算していくことで、コードドップラ成分が積算されていくことになるので、結果的にキャリア周波数を積算していくことに相当する処理を行うことができる。そして、このコード位相差の積算値は、切替回路35へ入力される。
【0045】
切替回路35は、スイッチ351とスイッチ352とを有する。スイッチ351は、コード追尾部33の積算器335とキャリア追尾部34との接続の開閉を切り替え可能なものである。スイッチ352は、コード追尾部33の加算器336をコード追尾部33の積算器335またはキャリア追尾部34のいずれかに接続するものである。この切替回路35の各スイッチ351,352の切替制御は、上述した追尾処理制御部37からの切替制御信号により行われる。
【0046】
そして、サーチ終了時点では、追尾処理制御部37から切替制御信号が与えられておらず、図3(A)に示すように、スイッチ351は開放であり、スイッチ352は積算器335と加算器336とを接続する。これにより、コード追尾部33と相関器31および積算器32とによる単独コード追尾ループ処理のための2次型フィードバックループが形成される。
【0047】
単独コード追尾ループ処理の実行時には、積算器335から切替回路35へ入力されたコード位相差の積算値は加算器336へ与えられ、加算器336は、第1増幅器333を介したベースバンド成分のコード位相差と、第2増幅器334および積算器335を介したコードドップラ成分のコード位相差の積算値とを加算して、第2単位変換部337へ出力する。
【0048】
第2単位変換部337は、時間単位のコード位相差をコードチップ単位のコード位相差に変換して、コードNCO330へ与える。コードNCO330は、与えられたコード位相差に基づいて、次のタイミングにおけるレプリカコード信号を生成するためのコード情報を生成し、相関器31へ出力する。
【0049】
一方、追尾処理制御部37から切替制御信号の入力があり、各スイッチ351,352の切替制御が行われると、図3(B)に示すように、スイッチ351は短絡になってコード追尾部33の積算器335とキャリア追尾部34とを接続し、スイッチ352はキャリア追尾部34とコード追尾部33の加算器336とを接続する。
【0050】
キャリア追尾部34は、キャリア追尾実行部341と第3単位変換部342と第4単位変換部343とを備える。キャリア追尾実行部341は、キャリアNCOやキャリア差検出部等の既知の構成からなり、キャリア追尾に関する各種処理を行い、キャリア周波数情報を相関器31へ出力する。キャリア追尾実行部341は、単独コード追尾ループが実行されている間は動作せず、切替制御信号が行われ、コード追尾部33と接続された時点からキャリア追尾を開始する。キャリア追尾の開始時点では、キャリア追尾実行部341は、コード追尾部33の積算器335から入力されるコード位相差の積算値を第4単位変換部343で時間単位から周波数単位へと変換した値、すなわち単独コード追尾ループ処理期間中でのキャリア周波数を受け付けて初期値を設定し、キャリア追尾を開始する。これにより、キャリア追尾ループへ高精度なキャリア周波数初期値を与えることができ、確実且つ高精度なキャリア追尾を行うことができる。
【0051】
そして、キャリア追尾実行部341は、算出したキャリア周波数情報を相関器31、第3単位変換部342、測位部15へ出力する。
【0052】
第3単位変換部342は、キャリア追尾実行部341により得られるキャリア周波数情報を時間の変化率、つまり時間単位へと変換して、切替回路35へ与える。この際、第3単位変換部342は追尾を行うコードに応じた変換率で変換を行う。時間単位に変換されたキャリア周波数情報は、スイッチ352を介してコード追尾部33の加算器336へ入力される。加算器336は、コード追尾部33で得られる上述のベースバンド成分のコード位相差と時間単位に変換されたキャリア周波数情報とを加算して出力する。このような構成とすることで、コード追尾部33、キャリア追尾部34、相関器31、積算器32からなる連結型コード・キャリア追尾ループが構成され、コードとキャリア周波数を並行して追尾することができる。
【0053】
擬似距離算出部38は、コード追尾部33からのコード位相差やキャリア追尾部34のキャリア周波数情報等に基づいて擬似距離を算出して、測位部15へ与える。
【0054】
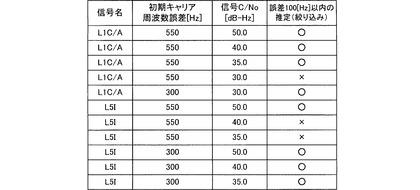
次に、本実施形態の構成を用いた場合のシミュレーション結果について示す。図4は搬送波信号の種類、サーチ終了時点での初期キャリア周波数誤差、および理想的に追尾できた際のC/Noをパラメータとして、キャリア周波数誤差が100[Hz]以内に推定できたかどうかを示す。
【0055】
図4に示すように、本実施形態の構成を用いることで、L1波のC/Aコードを用いた場合、初期キャリア周波数誤差が550[Hz]であってもC/Noが35[dB−Hz]以上であれば、誤差100[Hz]以内にキャリア周波数を推定できる。また、L1波のC/Aコードを用いた場合で初期キャリア周波数誤差が300[Hz]であれば、C/Noが30[dB−Hz]であっても、誤差100[Hz]以内にキャリア周波数を推定できる。さらに、L1波のC/Aコードを用いた場合、C/Noが良好であるほど大幅に周波数推定時間を短縮することができる。
【0056】
また、L5波のIコードを用いた場合、初期キャリア周波数誤差が550[Hz]であってもC/Noが50[dB−Hz]以上であれば、誤差100[Hz]以内にキャリア周波数を推定できる。また、L5波のIコードを用いた場合で初期キャリア周波数誤差が300[Hz]であれば、C/Noが35[dB−Hz]であっても、誤差100[Hz]以内にキャリア周波数を推定できる。
【0057】
図5は、従来の場合を示す図6と同じ条件で本実施形態の構成を用いた場合のシミュレーション結果であり、図5(A),(B)は、GPSのL1波のC/Aコードに関するキャリア周波数推移状況およびC/No(搬送波電力対雑音電力密度比)推移状況のシミュレーション結果を示す図であり、図5(C),(D)は、GPSのL5波のIコードに関するキャリア周波数推移状況およびC/No推移状況を示す図である。
【0058】
以上のように、本実施形態の構成を用いることで、C/Noによる追尾への悪影響を抑圧し、従来よりも悪い雑音環境であっても、確実且つ高精度にコード追尾およびキャリア周波数追尾を行うことができる。また、従来よりも初期キャリア周波数誤差が大きくても、確実且つ高精度にコード追尾およびキャリア周波数追尾を行うことができる。
【図面の簡単な説明】
【0059】
【図1】本発明の実施形態に係る測位信号復調装置に相当する復調部を含む測位装置の概略構成を示すブロック図である。
【図2】図1に示す復調部13の主要構成を示すブロック図である。
【図3】図2に示す切替回路37の切替動作を説明するための図、および、遷移時間TのC/No特性を示す1つのモデルを表したグラフである。
【図4】搬送波信号の種類、サーチ終了時点での初期キャリア周波数誤差、およびC/Noをパラメータとした追尾のシミュレーション結果を示した表である。
【図5】本実施形態の構成を用いた場合の追尾のシミュレーション結果を示した図である。
【図6】従来の追尾のシミュレーション結果を示した図である。
【符号の説明】
【0060】
11−測位信号受信アンテナ、12−ダウンコンバータ、13−復調部、14−航法メッセージ取得部、15−測位部、
31−相関器、32−積算器、33−コード追尾部、34−キャリア追尾部、35−-切替回路、36−C/No測定部、37−追尾処理制御部、38−擬似距離算出部、
330−コードNCO、331−コード位相検出部、332−第1単位変換部、333−第1増幅器、334−第2増幅器、335−積算器、336−加算器、337−第2単位変換部、341−キャリア追尾実行部、342−第3単位変換部、343−第4単位変換部、351,352−スイッチ
【技術分野】
【0001】
この発明は、測位信号の復調を行うために、測位信号のキャリア周波数およびコードの追尾を行う装置に関するものである。
【背景技術】
【0002】
従来、GPS受信機等のGNSS受信機では、測位等を行うために擬似距離やドップラ周波数を測定する必要がある。そして、当該擬似距離やドップラ周波数を測定するためには、測位信号の捕捉(サーチ)と追尾を行わなければならない。特に、擬似距離やドップラ周波数を高精度に測定するためには、コード追尾とキャリア周波数追尾との両方を行わなければならない。
【0003】
ところが、このようなGNSS受信機では、測位信号の捕捉時の状態によっては、追尾状態に入ってからキャリア周波数を追い込んでロックする過程で、十分な追い込みができなかったり、間違ったキャリア周波数にロックしてしまうという異常追尾現象が生じる。例えば、図6に示すような異常追尾が生じることがある。
【0004】
図6(A),(B)は、GPSのL1波のC/Aコードに関する異常追尾が生じた場合のキャリア周波数推移状況およびC/No(搬送波電力対雑音電力密度比)推移状況のシミュレーション結果を示す図であり、図6(C),(D)は、GPSのL5波のIコードに関する異常追尾が生じた場合のキャリア周波数推移状況およびC/No推移状況シミュレーション結果を示す図である。
【0005】
図6(A),(B)では、L1波C/Aコードに対して、捕捉時のベースバンド変換後におけるキャリア周波数が0[Hz]、目的周波数が500[Hz]、理想的に追尾できた際のC/Noが50[dB−Hz]である場合を示す。このような条件、すなわち、目的周波数に対して550Hzの周波数ズレがある状態で追尾を開始した場合、この追尾によって推定されるキャリア周波数は−1000[Hz]、すなわち周波数ズレが約1.5[kHz]になり、C/Noが低いまま推移する。このため、定常追尾に至ることができない。
【0006】
図6(C),(D)では、L5波Iコードに対して、捕捉時のベースバンド変換後におけるキャリア周波数が0[Hz]、目的周波数が500[Hz]、理想的に追尾できた際のC/Noが50[dB−Hz]である場合を示す。このような条件、すなわち、目的周波数に対して300Hzの周波数ズレがある状態で追尾を開始した場合、この追尾によって推定されるキャリア周波数は−200[Hz]、すなわち周波数ズレが500[Hz]になり、C/Noは高い値となる。これにより、間違ったキャリア周波数でロックされて追尾が行われてしまう。
【0007】
このような問題を解決する方法として、サーチを行った後にコード追尾を行い、コード位相差が十分に小さくなったことを確認してから、所定時間長(例えば1秒間)等のコード位相差を観測し、当該コード位相差の最小自乗値からキャリア周波数の初期値を推定し、当該初期値からキャリア周波数を追尾する方法が考えられている。さらには、特許文献1には、1つの測位衛星(測位信号)に対して複数チャンネルを用い、ピークサーチ、当該ピークに対応するサイドローブチェック、ピーク値のキャリア周波数確認を行うことで、正確なキャリア周波数を絞り込んでいく方法も考えられている。
【特許文献1】特開2004−12378号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上述の最小自乗法を用いる方法の場合、1つの測位衛星(測位信号)に対して1チャンネルを割り当てればよいが、最小自乗法を使用するため、演算処理量が多くなり、処理負荷が大きくなる。また、最小自乗法を行うためのサンプリング時間がC/Noに関係なく一定であるので、高精度なコード追尾やキャリア周波数追尾を行うための処理を、C/Noすなわち受信環境に応じて柔軟に適用させることができず、C/Noによっては高精度な追尾ができない可能性もある。
【0009】
また、特許文献1に示すような方法では、1つの測位衛星(測位信号)に対して2チャンネルを必要とするので、リソースを多く必要としてしまう。
【0010】
このような各問題を鑑みて、本発明の目的は、C/Noによるコード追尾結果やキャリア周波数追尾結果への影響を抑制し、高精度なコード、キャリア周波数追尾ができる簡素な構成の測位信号追尾処理装置を実現することにある。
【課題を解決するための手段】
【0011】
この発明は、測位信号に基づいてキャリア周波数の追尾を行うキャリア追尾部と、測位信号に基づいてコードの追尾を行うコード追尾部とを備えた測位信号追尾処理装置に関するものである。この測位信号追尾処理装置は、C/No推定手段と、キャリア周波数推定手段と、推定時間決定手段とを備える。C/No推定手段は、所定の相関処理がされた測位信号のC/Noを推定する。キャリア周波数推定手段は、コード追尾部内に備えられており、コード追尾部で検出されるコードドップラ成分に基づいて所定時間に亘りキャリア周波数を推定する。推定時間決定手段は、キャリア周波数を推定する所定時間を、C/Noに基づいて決定する。そして、キャリア追尾部は、キャリア周波数推定手段により推定されたキャリア周波数を初期値として該キャリア周波数の追尾を行う。
【0012】
この構成では、コード追尾部では、コードの追尾処理とともに、キャリア周波数推定手段で、コードドップラ成分からキャリア周波数が継続的に推定される。追尾されているコードは順次測位信号との相関処理に利用され、相関処理後の信号は、C/No推定手段によりC/Noが逐次推定される。推定時間決定手段は、C/Noに基づいてキャリア周波数推定手段でのキャリア周波数推定時間を決定する。そして、決定された推定時間に達すると、キャリア周波数推定手段で推定されたキャリア周波数が初期値としてキャリア追尾部へ与えられ、キャリア追尾が実行される。これにより、キャリア追尾部へは、コード追尾部で精度が向上したキャリア周波数が初期値として入力される。
【0013】
また、この発明の測位信号追尾処理装置の推定時間決定手段は、キャリア周波数を推定する所定時間をC/Noが良くなるほど短くする。
【0014】
この構成では、C/Noが元々良ければ、すなわち受信環境が良好であれば、早くキャリア周波数が推定される。また、コード追尾の開始当初ではC/Noが悪くても、コードが合わせ込まれてC/Noが良くなるほど、キャリア周波数の推定時間が早く短くなっていく。これにより、C/Noの状況に応じて最適な推定時間が決定される。
【0015】
また、この発明の測位信号追尾処理装置の推定時間決定手段は、C/Noが良くなるほど短くなる遷移時間を設定する。そして、推定時間決定手段は、遷移時間の逆数を予め設定したタイミング毎に積算していき、当該積算値が所定値に達するまでの時間を、キャリア周波数を推定する所定時間とする。
【0016】
この構成では、C/Noに基づく遷移時間の逆数の積算処理のみでキャリア周波数の推定時間が決定される。これにより、C/Noの推移により変化するキャリア周波数の推定時間が簡素な処理で決定される。
【0017】
また、この発明の測位信号追尾処理装置の推定時間決定手段は、C/Noを予め設定したタイミング毎に積算していき、当該積算値が所定値に達するまでの時間を、キャリア周波数を推定する所定時間とする。
【0018】
この構成では、C/Noの積算値を推定時間の決定基準とすることで、遷移時間を用いずとも、キャリア周波数の推定時間が算出される。
【0019】
また、この発明の測位信号追尾処理装置のコード追尾部は、コード位相差検出部を含む。コード位相差検出部は、測位信号に重畳するコードとコードNCOにより生成されるレプリカコードとのコード位相差を検出する。測位信号追尾処理装置のコード位相差検出部の出力側には、それぞれ異なるゲインを有する増幅器を備えた第1の系、第2の系が備えられており、該第2の系には、コード位相のコードドップラ成分を所定時間に亘り積算する前記積算器が挿入されている。このような構成において、具体的に、キャリア周波数推定手段は、コード位相差検出部、第2の系の増幅器、第2の系の積算器からなる。そして、キャリア追尾部は、積算器から出力される値に基づいたキャリア周波数を初期値として該キャリア周波数の追尾を行う。
【0020】
この構成では、上述のキャリア周波数推定手段の具体的な構成を示すものであり、この構成により、キャリア周波数推定手段は、コード追尾部に必須のコード位相差検出部と、コード追尾のためのフィードバックループに一般的に設置される増幅器や積算器とから構成される。特に増幅器や積算器は一般的な回路であるので、キャリア周波数推定手段が汎用の簡素な回路構成で実現される。
【0021】
また、この発明の測位装置は、復調部、航法メッセージ取得部、および測位部を備える。復調部は、上述の測位信号追尾処理装置を有し、追尾しているコードのコード位相差やキャリア周波数に基づいて擬似距離を算出する。航法メッセージ取得部は、復調部で復調された測位信号から航法メッセージを取得する。測位部は、擬似距離と航法メッセージとを用いて測位演算を行う。
【0022】
この構成では、上述のようにコードやキャリア周波数が確実且つ高精度に追尾されるので、擬似距離を高精度に取得することができる。これにより、高精度な測位演算が可能になる。
【発明の効果】
【0023】
この発明によれば、複雑且つ演算量の多い処理を行わなくても、簡素な構成で且つ簡素な演算処理で、C/Noによる追尾精度への影響を抑制して、確実且つ高精度にコード追尾およびキャリア周波数追尾を行うことができる。
【発明を実施するための最良の形態】
【0024】
本発明の実施形態に係る測位信号追尾処理装置の構成について、図を参照して説明する。なお、以下の説明では、GPSの場合を例として説明を行うが、Galileo等のGNSSの他のシステムにおける測位信号追尾処理装置に対しても、以下の構成を適用することができる。
【0025】
図1は本実施形態の測位信号追尾処理装置を備える復調部を含む測位装置の概略構成を示すブロック図である。
【0026】
測位装置は、測位信号受信アンテナ11、ダウンコンバータ12、本発明の測位信号追尾処理装置を含む復調部13、航法メッセージ取得部14、測位部15を備える。測位信号受信アンテナ11は、測位衛星から送信される測位用の電波信号を受信して、電気信号変換した測位信号をダウンコンバータ12へ出力する。測位信号は、所定周波数からなる搬送波(例えば、GPSのL1波であれば1575.42MHz等)を、測位衛星毎に設定されたコードと航法メッセージによりスペクトル拡散した信号である。ダウンコンバータ12は、測位信号の周波数をダウンコンバートして、所定周波数からなる中間周波数信号(以下、「IF信号」と称する。)を生成し、復調部13へ与える。
【0027】
復調部13は、スペクトル拡散されたIF信号に対してキャリア相関およびコード相関を行い、これら相関処理後の信号を所定時間長に亘り積算することで、逆拡散を行う。ここで、キャリア相関とコード相関とが高精度に行われていれば、この逆拡散信号には航法メッセージのみが重畳された状態になる。
【0028】
復調部13は、まず信号捕捉(サーチ)を行うことで、コードとキャリア周波数の粗調整を行う。復調部13は、C/Noがサーチ用閾値を超えた時点で、コード追尾のみを行う単独コード追尾ループ処理を実行する。この際、復調部13は、キャリア相関用にはサーチ終了時点で設定されているキャリア周波数を用い、キャリア追尾を行わない。次に、復調部13は、単独コード追尾ループでのコードの合わせ込みが成功すると、コード追尾とキャリア追尾とを同時・並行して行う連結型コード・キャリア追尾ループ処理(位相同期型DLL処理に対応する。)を実行する。この際、キャリア追尾部34には、コード追尾部33による単独コード追尾ループで得られたコードドップラの積算値が与えられる。そして、復調部13は、連結型コード・キャリア追尾ループによりコード追尾およびキャリア周波数追尾を実行していき、定常追尾に成功すると、得られたコード及びキャリア周波数によってIF信号を逆拡散処理して航法メッセージ取得部14へ与えるとともに、得られたコード及びキャリア周波数情報から擬似距離等を算出して測位部15へ与える。
【0029】
航法メッセージ取得部14は、復調部13からの航法メッセージが重畳された逆拡散信号に基づいて航法メッセージを取得し、測位部15に与える。
【0030】
測位部15は、航法メッセージ取得部14からの航法メッセージと、復調部13からの擬似距離やキャリア周波数情報等に基づいて測位演算を行い、測位装置の位置を算出する。
【0031】
次に、本発明の特徴部である復調部13の構成について、図2、図3を参照して具体的に説明する。
図2は図1に示す復調部13の主要構成を示すブロック図である。また、図3(A),(B)は図2に示す切替回路35の切替動作を説明するための図であり、図3(C)は遷移時間TのC/No特性を示す1つのモデルを表したグラフである。
【0032】
復調部13は、相関器31、積算器32、コード追尾部33、キャリア追尾部34、切替回路35、C/No測定部36、追尾処理制御部37、および擬似距離算出部38を備える。
【0033】
相関器31は、上述のようにIF信号に対して相関処理を行う。相関器31は、キャリア相関器と、コード相関器と、レプリカキャリア周波数信号生成部と、レプリカコード信号生成部とを備える。
【0034】
信号捕捉時には、相関器31は、既知のサーチ用コード・キャリア周波数生成手法によりレプリカキャリア周波数信号およびレプリカコード信号を生成し、キャリア相関器およびコード相関器で相関を行い、信号の捕捉(サーチ)を行う。そして、相関器31は、予め設定したサーチ用のC/Noの閾値を超えたことを検出すると、追尾用の相関処理に切り替える。
【0035】
追尾用の相関処理は、単独コード追尾ループ処理と連結型コード・キャリア追尾ループ処理とで異なる。単独コード追尾ループ処理の場合、相関器31は、コード追尾部33から出力されたコード情報に基づいてレプリカコード信号を生成し、サーチ終了時点でのキャリア周波数に基づいてレプリカキャリア周波数信号を生成する。一方、連結型コード・キャリア追尾ループの場合、相関器31は、コード追尾部33から出力されたコード情報に基づいてレプリカコード信号を生成し、キャリア追尾部34から出力されたキャリア周波数情報に基づいてレプリカキャリア周波数信号を生成する。
【0036】
相関器31のキャリア相関器はIF信号とレプリカキャリア周波数信号との相関処理を行い、コード相関器はキャリア相関後のIF信号とレプリカコード信号との相関処理を行う。
【0037】
積算器32は、上述のように相関処理後のIF信号を所定時間長、例えば1[msec.]に亘り積算することで、逆拡散信号を生成する。逆拡散信号は、航法メッセージ取得部14へ与えられるとともに、コード追尾部33、キャリア追尾部34、C/No測定部36へも与えられる。
【0038】
C/No測定部36は、積算器32から出力される逆拡散信号のC/No(搬送波電力対雑音電力密度比)を順次測定して追尾処理制御部37へ与える。
【0039】
本発明の切替タイミング指示手段に相当する追尾処理制御部37は、取得したC/Noに基づいて、切替回路35への切替制御信号を与えるタイミングを設定するための遷移時間Tを決定する。ここで、遷移時間Tは、図3(C)に示すように、C/Noが高くなる、すなわち雑音が少なくC/Noが良くなるほど短く設定されており、C/Noが低くなる、すなわち雑音が多くC/Noが悪くなるほど長く設定されている。さらに、遷移時間Tは、C/Noに対して負の指数関数的に短くなるように設定されている。例えば、追尾処理制御部37は、このように決定された遷移時間Tの逆数(1/T)を、予め設定した等時間間隔からなる単位時間毎に積算していく。そして、追尾処理制御部37は、当該積算結果が所定閾値に達した時点を切替タイミングと判定して、切替制御信号を切替回路35へ与える。このように、遷移時間Tを決定して切替タイミングを算出することで、C/Noが高ければ、コード追尾部33による単独コード追尾ループから、コード追尾部33とキャリア追尾部34とが連動してなる連結型コード・キャリア追尾ループへの切替タイミングを早くすることができる。一方で、C/Noが低ければ、単独コード追尾ループから連結型コード・キャリア追尾ループへの切替タイミングを遅くすることができる。さらに、C/Noが低い状態から高くなる速度が速ければ、C/Noが高くなる速度が遅い場合よりも、単独コード追尾ループから連結型コード・キャリア追尾ループへの切替タイミングを早くすることができる。この際、C/Noが低くなるほど単独コード追尾ループの実行時間長が長くなるので、サーチの閾値を超えるレベルを有するC/Noであれば、C/Noに影響されることなく、確実に高精度なコード追尾を行うことができる。
【0040】
なお、追尾処理制御部37は、C/No測定部36から与えられるC/Noを逐次積算して、この積算された値が所定閾値に達した時点を切替タイミングと判定してもよい。
【0041】
コード追尾部33は、コードNCO330、コード位相差検出部331、第1単位変換部332、第1増幅器333、第2増幅器334、積算器335、加算器336、第2単位変換部337を備える。
【0042】
コード位相差検出部331は、逆拡散信号に含まれるコード位相差、すなわち、コードNCO330のコード情報に基づいて生成されたレプリカコード信号とIF信号とのコード位相差を検出して、第1単位変換部332へ与える。第1単位変換部332は、コードチップ単位を基準にしたコード位相差から、時間単位のコード位相差に単位変換して、第1増幅器333および第2増幅器334へ出力する。
【0043】
第1増幅器333は、コード位相のベースバンド成分を出力し、第2増幅器334はコード位相に対するコードドップラ成分を出力するようにゲイン設定される。この際、第1増幅器333および第2増幅器334は、各タイミングでのC/Noに応じた帯域幅で設定される。第1増幅器333から得られたコード位相差は、加算器336に入力される。一方、第2増幅器334から得られたコード位相差は、積算器335へ入力される。
【0044】
積算器335は、第2増幅器334から得られたコード位相差を順次積算していく。ここで、積算器335に積算されていくコード位相差は、測位衛星の移動等により生じるコードドップラ成分であるので、これらを積算していくことで、コードドップラ成分が積算されていくことになるので、結果的にキャリア周波数を積算していくことに相当する処理を行うことができる。そして、このコード位相差の積算値は、切替回路35へ入力される。
【0045】
切替回路35は、スイッチ351とスイッチ352とを有する。スイッチ351は、コード追尾部33の積算器335とキャリア追尾部34との接続の開閉を切り替え可能なものである。スイッチ352は、コード追尾部33の加算器336をコード追尾部33の積算器335またはキャリア追尾部34のいずれかに接続するものである。この切替回路35の各スイッチ351,352の切替制御は、上述した追尾処理制御部37からの切替制御信号により行われる。
【0046】
そして、サーチ終了時点では、追尾処理制御部37から切替制御信号が与えられておらず、図3(A)に示すように、スイッチ351は開放であり、スイッチ352は積算器335と加算器336とを接続する。これにより、コード追尾部33と相関器31および積算器32とによる単独コード追尾ループ処理のための2次型フィードバックループが形成される。
【0047】
単独コード追尾ループ処理の実行時には、積算器335から切替回路35へ入力されたコード位相差の積算値は加算器336へ与えられ、加算器336は、第1増幅器333を介したベースバンド成分のコード位相差と、第2増幅器334および積算器335を介したコードドップラ成分のコード位相差の積算値とを加算して、第2単位変換部337へ出力する。
【0048】
第2単位変換部337は、時間単位のコード位相差をコードチップ単位のコード位相差に変換して、コードNCO330へ与える。コードNCO330は、与えられたコード位相差に基づいて、次のタイミングにおけるレプリカコード信号を生成するためのコード情報を生成し、相関器31へ出力する。
【0049】
一方、追尾処理制御部37から切替制御信号の入力があり、各スイッチ351,352の切替制御が行われると、図3(B)に示すように、スイッチ351は短絡になってコード追尾部33の積算器335とキャリア追尾部34とを接続し、スイッチ352はキャリア追尾部34とコード追尾部33の加算器336とを接続する。
【0050】
キャリア追尾部34は、キャリア追尾実行部341と第3単位変換部342と第4単位変換部343とを備える。キャリア追尾実行部341は、キャリアNCOやキャリア差検出部等の既知の構成からなり、キャリア追尾に関する各種処理を行い、キャリア周波数情報を相関器31へ出力する。キャリア追尾実行部341は、単独コード追尾ループが実行されている間は動作せず、切替制御信号が行われ、コード追尾部33と接続された時点からキャリア追尾を開始する。キャリア追尾の開始時点では、キャリア追尾実行部341は、コード追尾部33の積算器335から入力されるコード位相差の積算値を第4単位変換部343で時間単位から周波数単位へと変換した値、すなわち単独コード追尾ループ処理期間中でのキャリア周波数を受け付けて初期値を設定し、キャリア追尾を開始する。これにより、キャリア追尾ループへ高精度なキャリア周波数初期値を与えることができ、確実且つ高精度なキャリア追尾を行うことができる。
【0051】
そして、キャリア追尾実行部341は、算出したキャリア周波数情報を相関器31、第3単位変換部342、測位部15へ出力する。
【0052】
第3単位変換部342は、キャリア追尾実行部341により得られるキャリア周波数情報を時間の変化率、つまり時間単位へと変換して、切替回路35へ与える。この際、第3単位変換部342は追尾を行うコードに応じた変換率で変換を行う。時間単位に変換されたキャリア周波数情報は、スイッチ352を介してコード追尾部33の加算器336へ入力される。加算器336は、コード追尾部33で得られる上述のベースバンド成分のコード位相差と時間単位に変換されたキャリア周波数情報とを加算して出力する。このような構成とすることで、コード追尾部33、キャリア追尾部34、相関器31、積算器32からなる連結型コード・キャリア追尾ループが構成され、コードとキャリア周波数を並行して追尾することができる。
【0053】
擬似距離算出部38は、コード追尾部33からのコード位相差やキャリア追尾部34のキャリア周波数情報等に基づいて擬似距離を算出して、測位部15へ与える。
【0054】
次に、本実施形態の構成を用いた場合のシミュレーション結果について示す。図4は搬送波信号の種類、サーチ終了時点での初期キャリア周波数誤差、および理想的に追尾できた際のC/Noをパラメータとして、キャリア周波数誤差が100[Hz]以内に推定できたかどうかを示す。
【0055】
図4に示すように、本実施形態の構成を用いることで、L1波のC/Aコードを用いた場合、初期キャリア周波数誤差が550[Hz]であってもC/Noが35[dB−Hz]以上であれば、誤差100[Hz]以内にキャリア周波数を推定できる。また、L1波のC/Aコードを用いた場合で初期キャリア周波数誤差が300[Hz]であれば、C/Noが30[dB−Hz]であっても、誤差100[Hz]以内にキャリア周波数を推定できる。さらに、L1波のC/Aコードを用いた場合、C/Noが良好であるほど大幅に周波数推定時間を短縮することができる。
【0056】
また、L5波のIコードを用いた場合、初期キャリア周波数誤差が550[Hz]であってもC/Noが50[dB−Hz]以上であれば、誤差100[Hz]以内にキャリア周波数を推定できる。また、L5波のIコードを用いた場合で初期キャリア周波数誤差が300[Hz]であれば、C/Noが35[dB−Hz]であっても、誤差100[Hz]以内にキャリア周波数を推定できる。
【0057】
図5は、従来の場合を示す図6と同じ条件で本実施形態の構成を用いた場合のシミュレーション結果であり、図5(A),(B)は、GPSのL1波のC/Aコードに関するキャリア周波数推移状況およびC/No(搬送波電力対雑音電力密度比)推移状況のシミュレーション結果を示す図であり、図5(C),(D)は、GPSのL5波のIコードに関するキャリア周波数推移状況およびC/No推移状況を示す図である。
【0058】
以上のように、本実施形態の構成を用いることで、C/Noによる追尾への悪影響を抑圧し、従来よりも悪い雑音環境であっても、確実且つ高精度にコード追尾およびキャリア周波数追尾を行うことができる。また、従来よりも初期キャリア周波数誤差が大きくても、確実且つ高精度にコード追尾およびキャリア周波数追尾を行うことができる。
【図面の簡単な説明】
【0059】
【図1】本発明の実施形態に係る測位信号復調装置に相当する復調部を含む測位装置の概略構成を示すブロック図である。
【図2】図1に示す復調部13の主要構成を示すブロック図である。
【図3】図2に示す切替回路37の切替動作を説明するための図、および、遷移時間TのC/No特性を示す1つのモデルを表したグラフである。
【図4】搬送波信号の種類、サーチ終了時点での初期キャリア周波数誤差、およびC/Noをパラメータとした追尾のシミュレーション結果を示した表である。
【図5】本実施形態の構成を用いた場合の追尾のシミュレーション結果を示した図である。
【図6】従来の追尾のシミュレーション結果を示した図である。
【符号の説明】
【0060】
11−測位信号受信アンテナ、12−ダウンコンバータ、13−復調部、14−航法メッセージ取得部、15−測位部、
31−相関器、32−積算器、33−コード追尾部、34−キャリア追尾部、35−-切替回路、36−C/No測定部、37−追尾処理制御部、38−擬似距離算出部、
330−コードNCO、331−コード位相検出部、332−第1単位変換部、333−第1増幅器、334−第2増幅器、335−積算器、336−加算器、337−第2単位変換部、341−キャリア追尾実行部、342−第3単位変換部、343−第4単位変換部、351,352−スイッチ
【特許請求の範囲】
【請求項1】
測位信号に基づいてキャリア周波数の追尾を行うキャリア追尾部と、前記測位信号に基づいてコードの追尾を行うコード追尾部とを備えた測位信号追尾処理装置であって、
所定の相関処理がされた前記測位信号のC/Noを推定するC/No推定手段と、
前記コード追尾部内に備えられ、該コード追尾部で検出されるコードドップラ成分に基づいて所定時間に亘りキャリア周波数を推定するキャリア周波数推定手段と、
前記キャリア周波数を推定する所定時間を、前記C/Noに基づいて決定する推定時間決定手段と、を備え、
前記キャリア追尾部は、前記キャリア周波数推定手段により推定されたキャリア周波数を初期値として該キャリア周波数の追尾を行う、ことを特徴とする測位信号追尾処理装置。
【請求項2】
前記推定時間決定手段は、前記キャリア周波数を推定する所定時間を前記C/Noが良くなるほど短くする、請求項1に記載の測位信号処理追尾装置。
【請求項3】
前記推定時間決定手段は、前記C/Noが良くなるほど短くなる遷移時間を設定し、該遷移時間の逆数を予め設定したタイミング毎に積算していき、当該積算値が所定値に達するまでの時間を、前記キャリア周波数を推定する所定時間とする、請求項1または請求項2に記載の測位信号追尾処理装置。
【請求項4】
前記推定時間決定手段は、前記C/Noを予め設定したタイミング毎に積算していき、当該積算値が所定値に達するまでの時間を、前記キャリア周波数を推定する所定時間とする、請求項1または請求項2に記載の測位信号追尾処理装置。
【請求項5】
前記コード追尾部は、前記測位信号に重畳するコードとコードNCOにより生成されるレプリカコードとのコード位相差を検出するコード位相差検出部を含み、該コード位相差検出部の出力側に、それぞれ異なるゲインを有する増幅器を備えた第1の系、第2の系を有し、該第2の系には、前記コード位相のコードドップラ成分を前記所定時間に亘り積算する前記積算器が挿入されており、
前記キャリア周波数推定手段は、前記コード位相差検出部、前記第2の系の増幅器、前記第2の系の積算器からなり、
前記キャリア追尾部は、前記積算器から出力される値に基づいたキャリア周波数を前記初期値として該キャリア周波数の追尾を行う、請求項1〜請求項4のいずれかに記載の測位信号追尾処理装置。
【請求項6】
請求項1〜請求項5のいずれかに記載の測位信号追尾処理装置を有し、追尾しているコードのコード位相差やキャリア周波数に基づいて擬似距離を算出する復調部と、
該復調部で復調された測位信号から航法メッセージを取得する航法メッセージ取得部と、
前記擬似距離と前記航法メッセージとを用いて測位演算を行う測位部とを、を備えた測位装置。
【請求項1】
測位信号に基づいてキャリア周波数の追尾を行うキャリア追尾部と、前記測位信号に基づいてコードの追尾を行うコード追尾部とを備えた測位信号追尾処理装置であって、
所定の相関処理がされた前記測位信号のC/Noを推定するC/No推定手段と、
前記コード追尾部内に備えられ、該コード追尾部で検出されるコードドップラ成分に基づいて所定時間に亘りキャリア周波数を推定するキャリア周波数推定手段と、
前記キャリア周波数を推定する所定時間を、前記C/Noに基づいて決定する推定時間決定手段と、を備え、
前記キャリア追尾部は、前記キャリア周波数推定手段により推定されたキャリア周波数を初期値として該キャリア周波数の追尾を行う、ことを特徴とする測位信号追尾処理装置。
【請求項2】
前記推定時間決定手段は、前記キャリア周波数を推定する所定時間を前記C/Noが良くなるほど短くする、請求項1に記載の測位信号処理追尾装置。
【請求項3】
前記推定時間決定手段は、前記C/Noが良くなるほど短くなる遷移時間を設定し、該遷移時間の逆数を予め設定したタイミング毎に積算していき、当該積算値が所定値に達するまでの時間を、前記キャリア周波数を推定する所定時間とする、請求項1または請求項2に記載の測位信号追尾処理装置。
【請求項4】
前記推定時間決定手段は、前記C/Noを予め設定したタイミング毎に積算していき、当該積算値が所定値に達するまでの時間を、前記キャリア周波数を推定する所定時間とする、請求項1または請求項2に記載の測位信号追尾処理装置。
【請求項5】
前記コード追尾部は、前記測位信号に重畳するコードとコードNCOにより生成されるレプリカコードとのコード位相差を検出するコード位相差検出部を含み、該コード位相差検出部の出力側に、それぞれ異なるゲインを有する増幅器を備えた第1の系、第2の系を有し、該第2の系には、前記コード位相のコードドップラ成分を前記所定時間に亘り積算する前記積算器が挿入されており、
前記キャリア周波数推定手段は、前記コード位相差検出部、前記第2の系の増幅器、前記第2の系の積算器からなり、
前記キャリア追尾部は、前記積算器から出力される値に基づいたキャリア周波数を前記初期値として該キャリア周波数の追尾を行う、請求項1〜請求項4のいずれかに記載の測位信号追尾処理装置。
【請求項6】
請求項1〜請求項5のいずれかに記載の測位信号追尾処理装置を有し、追尾しているコードのコード位相差やキャリア周波数に基づいて擬似距離を算出する復調部と、
該復調部で復調された測位信号から航法メッセージを取得する航法メッセージ取得部と、
前記擬似距離と前記航法メッセージとを用いて測位演算を行う測位部とを、を備えた測位装置。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−25853(P2010−25853A)
【公開日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願番号】特願2008−189780(P2008−189780)
【出願日】平成20年7月23日(2008.7.23)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
【公開日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願日】平成20年7月23日(2008.7.23)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
[ Back to top ]