
測位場所識別装置、測位場所識別方法、プログラム及び測位場所識別システム
【課題】取得した軌跡から軌跡が位置する場所の状態を識別することができること。
【解決手段】測位場所識別システムは、ネットワークを介して相互に接続される端末11及びサーバ12を備える。端末11又はサーバ12は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された複数のGPS測位データを取得する。端末又はサーバは、端末11により取得された複数のGPS測位データに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を判別する。
【解決手段】測位場所識別システムは、ネットワークを介して相互に接続される端末11及びサーバ12を備える。端末11又はサーバ12は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された複数のGPS測位データを取得する。端末又はサーバは、端末11により取得された複数のGPS測位データに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を判別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測位場所識別装置、測位場所識別方法、プログラム及び測位場所識別システムに関する。
【背景技術】
【0002】
従来より端末等の移動体の軌跡から地図を自動的に生成する技術が考えられている。例えば特許文献1は、移動体の軌跡を道として識別し、また、移動体の状態の変化から階段や扉等の地物の属性を識別する。そして、識別した道や地物の属性から地図を自動的に生成する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−333998号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術では、移動体の軌跡すべてを道として識別してしまうため、取得した軌跡の場所の識別、例えば、軌跡が属する場所が道かそれ以外の建築物内部かの識別は非常に困難であった。
【0005】
本発明は、このような状況に鑑みてなされたものであり、取得した軌跡から軌跡が位置する場所の状態を識別することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一態様の測位場所識別装置は、時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータを取得する取得手段と、前記取得手段により取得された前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を識別する状態識別手段と、を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、取得した軌跡から軌跡が位置する場所の状態を識別することができる。
【図面の簡単な説明】
【0008】
【図1】本発明に係る測位場所識別装置を用いたシステムの一実施形態としての地図生成システムの構成を示すシステム構成図である。
【図2】図1の地図生成システムのうちの端末のハードウェア構成を示すブロック図である。
【図3】図1の地図生成システムのうちのサーバ12のハードウェア構成を示すブロック図である。
【図4】状態の識別のうち、道以外の状態の識別の原理を説明する模式図である。
【図5】状態の識別のうち、道の状態の識別の原理を説明する模式図である。
【図6】図1の地図生成システムの機能的構成のうち、地図生成処理を実行するための機能的構成を示す機能ブロック図である。
【図7】図1の地図生成システムの機能的構成のうち、軌跡取得処理を実行するための機能的構成を示す機能ブロック図である。
【図8】図1の地図生成システムの機能的構成のうち、状態識別処理を実行するための機能的構成を示す機能ブロック図である。
【図9】図1の地図生成システムの機能的構成のうち、自律航法測位精度推測処理を実行するための機能的構成を示す機能ブロック図である。
【図10】自律航法測位精度の推測を説明するための模式図である。
【図11】図1の地図生成システムの機能的構成のうち、地図データ生成処理を実行するための機能的構成を示す機能ブロック図である。
【図12】図2の端末及び図3の地図生成装置が実行する地図生成処理の流れを説明するフローチャートである。
【図13】図12の地図生成処理のステップS1の軌跡取得処理の詳細な流れを説明するフローチャートである。
【図14】図12の地図生成処理のステップS2の状態識別処理の詳細な流れを説明するフローチャートである。
【図15】図14の地図生成処理のステップS59の測位精度推測処理の詳細な流れを説明するフローチャートである。
【図16】図12の地図生成処理のステップS3の地図描画処理の詳細な流れを説明するフローチャートである。
【図17】本発明の第2の実施形態に係る地図生成システムの構成を示すシステム構成図である。
【図18】第2の実施形態に係る状態識別処理の詳細な流れを説明するフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を用いて説明する。
【0010】
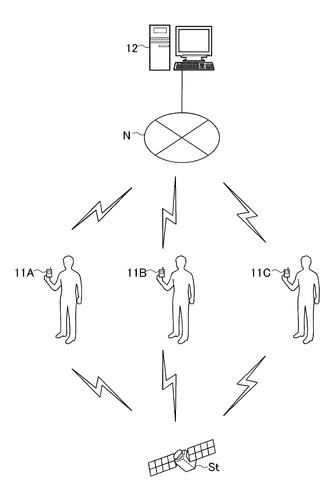
図1は、本発明に係る測位場所識別システムの一実施形態としての地図生成システムの構成を示すシステム構成図である。
図1の例では、地図生成システムは、3台の端末11A乃至11Cと、サーバ12と、がネットワークNを介して相互に接続されることで構成されている。
なお以下、端末11A乃至11Cを個々に区別する必要がない場合、これらをまとめて、「端末11」と単に呼ぶ。このように符号の最後のアルファベットを省略して呼称している場合には、端末11の構成要素に付される符号の最後のアルファベットも省略する。
【0011】
端末11は、上空にある数個のGPS(Global Positioning System、全地球測位システム)用衛星Stからの信号を受け取り、自機の位置を測位することができるように、GPSでの運用が可能な機能を有している。また、端末11は、端末11の移動に伴う移動量等を取得可能な機能を有している。
端末11は、これらの機能を使って、自機の位置情報を取得して、サーバ12に送信する。なお、図1には、3台の端末11が図示されているが、これは例示に過ぎない。1台であっても本システムは運用可能であり、また、地図の拡充や精度の向上を図るために3台以上の端末11を使用してもよい。
【0012】
サーバ12は、インターネット等のネットワークNを介して、端末11等と情報の授受ができる機能を有している。サーバ12は、端末11から位置情報を受信して、端末11からの位置情報に基づいて、既知の地図に建築物や道の情報を追加することで、新たな地図を示す地図データを生成する。
【0013】
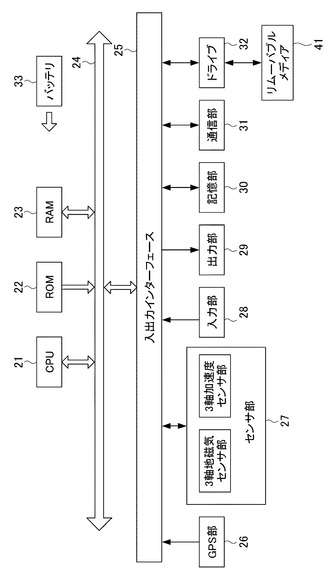
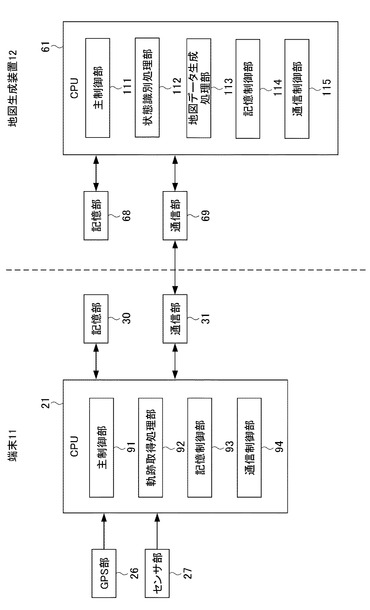
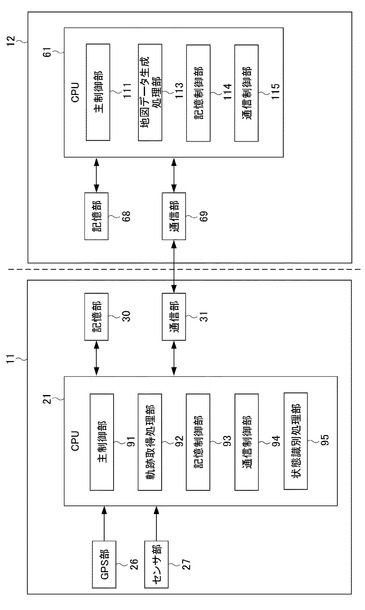
図2は、図1の地図生成システムのうちの端末11のハードウェア構成を示すブロック図である。
【0014】
端末11は、CPU(Central Processing Unit)21と、ROM(Read Only Memory)22と、RAM(Random Access Memory)23と、バス24と、入出力インターフェース25と、GPS部26と、センサ部27と、入力部28と、出力部29と、記憶部30と、通信部31と、ドライブ32と、バッテリ33を備えている。
【0015】
CPU21は、ROM22に記録されているプログラム、又は、記憶部30からRAM23にロードされたプログラムに従って各種の処理を実行する。
【0016】
RAM23には、CPU21が各種の処理を実行する上において必要なデータ等も適宜記憶される。
【0017】
CPU21、ROM22及びRAM23は、バス24を介して相互に接続されている。このバス24にはまた、入出力インターフェース25も接続されている。入出力インターフェース25には、入力部28、出力部29、記憶部30、通信部31及びドライブ32が接続されている。
【0018】
GPS部26は、GPS受信アンテナを介して、複数のGPS用衛星StからのGPS信号を受信する。CPU21は、GPS部26が受信したGPS信号に基づいて、端末11の現在位置を示す緯度及び経度、高度のデータ(以下、「測位位置のデータ」とも適宜呼ぶ)を算出する。
【0019】
センサ部27は、端末11の状態の変化を移動量として計測する。本実施形態において、センサ部27は、3軸地磁気センサと、3軸加速度センサとにより構成される。
3軸地磁気センサは、例えば外部磁界の変動に応じてインピーダンスが変化するMI素子を用いて検出した地磁気の3軸(X,Y,Z)成分を表す3軸地磁気データを出力する。
3軸加速度センサは、ピエゾ抵抗型もしくは静電容量型の検出機構により3軸加速度成分を検出して3軸成分毎の加速度データを出力する。なお、3軸加速度センサにより検出される3軸成分は、3軸地磁気センサの3軸(X,Y,Z)成分にそれぞれ対応する。
【0020】
入力部28は、各種釦等で構成され、ユーザの指示操作に応じて各種情報を入力する。
出力部29は、ディスプレイやスピーカ等で構成され、画像や音声を出力する。
記憶部30は、ハードディスク或いはDRAM(Dynamic Random Access Memory)等で構成され、各種情報のデータを記憶する。記憶部30は、例えば、端末11の軌跡に係るデータ、地図の生成に係るデータを記憶する。
通信部31は、他の端末11やサーバ12を含む他の装置との間で、インターネットを含むネットワークNを介して行う通信を制御する。
【0021】
ドライブ32には、磁気ディスク、光ディスク、光磁気ディスク、或いは半導体メモリ等よりなる、リムーバブルメディア41が適宜装着される。ドライブ32によってリムーバブルメディア41から読み出されたプログラムは、必要に応じて記憶部30にインストールされる。また、リムーバブルメディア41は、記憶部30に記憶されている情報のデータ等の各種データも、記憶部30と同様に記憶することができる。
【0022】
バッテリ33は、例えば、リチウムイオン二次電池により構成され、端末11に駆動用の電力を供給する電力供給源である。
【0023】
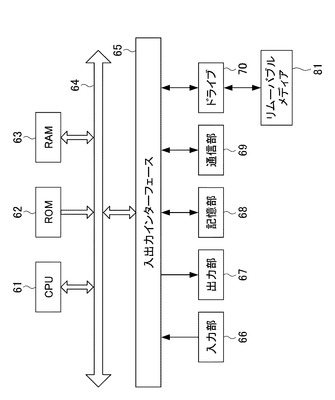
図3は、図1の地図生成システムのうちのサーバ12のハードウェア構成を示すブロック図である。
【0024】
サーバ12は、CPU61〜ドライブ70を備えている。CPU61〜ドライブ70の各々は、上述した図2のCPU21〜ドライブ32の各々と基本的に同様の機能と構成を有している。従って、CPU61〜ドライブ70の個々の説明は、ここでは省略する。
【0025】
以上のように構成される地図生成システムにおいては、サーバ12は、移動する端末11により逐次取得される複数の現在位置のデータから、当該端末11の移動の軌跡を特定し、当該軌跡に基づいて道や建築物内部を識別して、識別した道や建築物内部を含む地図を示す地図データを生成する。なお、本実施形態において、地図データの生成とは、地図データを最初から生成することに加えて、既存の地図データを修正して新たな地図データを生成し直すことも含むものとする。以下の実施形態においては、既存の地図に道や建築物内部を追加する修正を行うことで、新たな地図データとして生成する例について説明する。
【0026】
本例では、サーバ12は、端末11により取得された複数の測位位置のデータ(GPSデータ)に基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて第1の測位位置と第2の測位位置との間の場所の状態を判別する。
なお、場所の状態は、特に限定されないが、本実施形態では、道が存在する状態と、建築物内部との2種類が存在するものとして、以下の説明をする。
【0027】
次に、軌跡が属する場所の状態を識別する原理について、図4及び図5を参照しながら以下説明する。
まず、状態の識別のうち、道以外の状態、即ち建築物内部を識別する原理について図4を参照しながら説明し、次いで、状態の識別のうち、道が存在する状態を識別する原理について図5を参照しながら説明する。
ここで、軌跡とは、GPS又は自律航法により取得された測位位置の集合であり、端末の測位位置の変遷から導き出される端末保持者の移動経路のことである。
【0028】
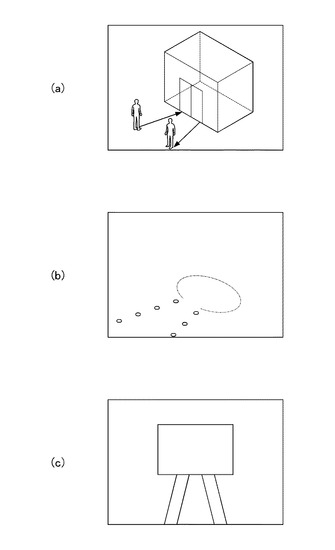
図4は、場所の状態の識別のうち、道以外の状態の識別の原理を説明する模式図で、(a)は端末保持者が建築物への出入りした実際の動作の一例を示した模式図であり、(b)は(a)の例における軌跡をその場所に配置した場合の一例を示した模式図であり、(c)は(b)から生成した地図の一例を示す模式図である。
【0029】
図4(a)の例では、端末保持者が建築物への出入りする場合を示している。この場合には、建築物の外では、GPS用衛星Stからの電波の受信が可能なため、GPSにより位置が測位されて自機の軌跡が取得される。その後、建築物に入った場合には、GPS用衛星Stからの電波が受信できなくなるために、GPSによる測位の代わりに、自律航法により取得した移動方向及び移動量から自機の軌跡を割り出す。
【0030】
従って、このように取得された自機の軌跡を地図上に展開すると、図4(b)に示したようになり、丸印のGPSの軌跡の先に、2点鎖線の自律航法の軌跡が円弧状に表示され、円弧の端部にさらに、丸印のGPSの軌跡が表示されることとなる。
【0031】
図4(b)の表示結果の状態を識別すると、GPSにより測位された軌跡を道の状態を識別し、自律航法により測位された軌跡の前後のGPSにより測位された位置(第1の測位位置及び第2の測位位置)が近いことから自律航法により測位された軌跡の部分は建築物内部と識別する。この識別結果を地図上に描画すると、図4(c)に示すように、建築物と建築物につながっている2つの道を生成させることができる。
【0032】
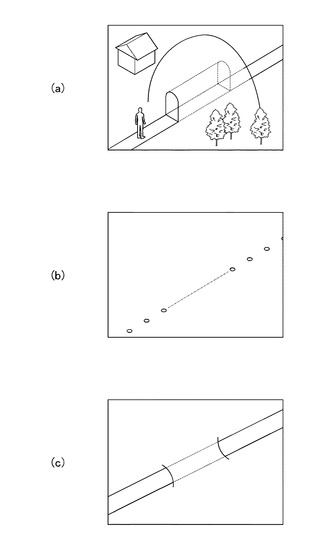
図5は、状態の識別のうち、道の状態の識別の原理を説明する模式図で、(a)は端末保持者がトンネルに入ってから出るまでの実際の動作の一例を示した模式図であり、(b)は(a)の例における軌跡をその場所に配置した場合の一例を示した模式図であり、(c)は(b)から生成した地図の一例を示す模式図である。
【0033】
図5(a)の例では、端末保持者がトンネルに入ってから出るまでの場合を示している。この場合には、トンネルの外では、GPS用衛星Stからの電波の受信が可能なため、GPSにより位置が測位されて自機の軌跡が取得される。その後、トンネルに入った場合には、GPS用衛星Stからの電波が受信できなくなるために、GPSによる測位の代わりに、自律航法により取得した移動方向及び移動量から自機の軌跡を割り出す。
【0034】
従って、このように取得された自機の軌跡を地図上に展開すると、図5(b)に示したようになり、丸印のGPSの軌跡の先に、2点鎖線の自律航法の軌跡が直線状に表示され、直線の先に、丸印のGPSの軌跡が表示されることとなる。
【0035】
図5(b)の表示結果の状態を識別すると、GPSにより測位された軌跡を道の状態を識別し、自律航法により測位された軌跡の前後のGPSにより測位された位置(第1の測位位置及び第2の測位位置)が遠いことから自律航法により測位された軌跡の部分はトンネルの内部の道と識別にする。この識別結果を地図上に描画すると、図5(c)に示すように、トンネルを通過する道を生成させることができる。
【0036】
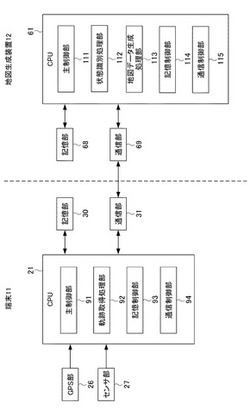
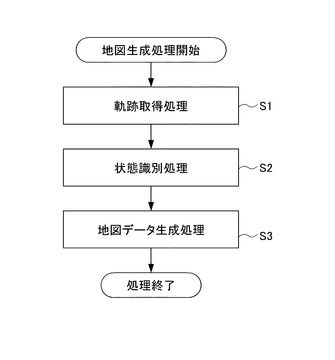
図6は、このような地図生成システムの機能的構成のうち、地図生成処理を実行するための機能的構成を示す機能ブロック図である。
「地図生成処理」とは、端末11から取得した端末11の軌跡に基づいて、地図を生成するまでの一連の処をいう。「地図生成処理」は、具体的な処理として、端末11で軌跡取得処理及び状態識別処理を行い、サーバ12で地図データ生成処理を行う。
なお、図6は、本発明が適用される測位場所識別装置がサーバ12により構成されている場合の機能的構成例を示している。当然、本発明が適用される測位場所識別装置は端末11により構成されてもよいが、この場合の機能的構成については図17を参照して後述する。
【0037】
端末11が地図生成処理を実行する場合には、図6に示すように、CPU21においては、主制御部91と、軌跡取得処理部92と、記憶制御部93と、通信制御部94と、が機能する。
主制御部91は、地図生成処理のうち、軌跡取得処理の実行全体を制御する。
軌跡取得処理部92は、端末11の移動の軌跡を取得する処理を行う。詳細には、軌跡取得処理部92は、GPS部26からGSP用衛星Stの電波が受信可能な屋外における移動の軌跡を取得し、センサ部27から端末11の状態変化を取得する。即ち、軌跡取得処理部92は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された測位位置のデータを取得する。
軌跡取得処理部92が実行する軌跡取得処理の詳細については後述する。
記憶制御部93は、例えば端末11の軌跡に係るデータ(端末11の現在位置としてそれぞれ測位されたGPS測位データ及び自律航法測位データ)等の各種データを記憶するように記憶部30を制御する。
通信制御部94は、例えば端末11の軌跡に係るデータ等の各種データを送受信するように通信部31を制御する。
【0038】
また、サーバ12が地図生成処理を実行する場合には、図6に示すように、CPU61においては、主制御部111と、状態識別処理部112と、地図データ生成処理部113と、記憶制御部114と、通信制御部115と、が機能する。
主制御部111は、地図生成処理のうち、状態識別処理及び地図データ生成処理の実行全体を制御する。
状態識別処理部112は、端末11から通信部69を介して受信した軌跡の情報に基づいて、軌跡が属するその場所の状態を識別する。詳細には、状態識別処理部112は、軌跡に対応する領域が道か道以外かの状態を識別する。即ち、状態識別処理部112は、軌跡取得処理部92により取得された複数の測位位置のデータに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末11の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を識別する。
状態識別処理部112が実行する状態識別処理の詳細については後述する。
地図データ生成処理部113は、状態識別処理部112により識別された状態を地図に反映、即ち、地図に道と道以外の状態を描画する。即ち、地図データ生成処理部113は、状態識別処理部112により識別された場所の状態を反映させた地図を示す地図データを生成する。
地図データ生成処理部113が実行する地図データ生成処理の詳細については後述する。
記憶制御部114は、例えば取得した端末11の軌跡に係るデータ、地図の生成に係るデータ等の各種データを記憶するように記憶部68を制御する。
通信制御部115は、例えば端末11の軌跡に係るデータ等の各種データを送受信するように通信部69を制御する。
【0039】
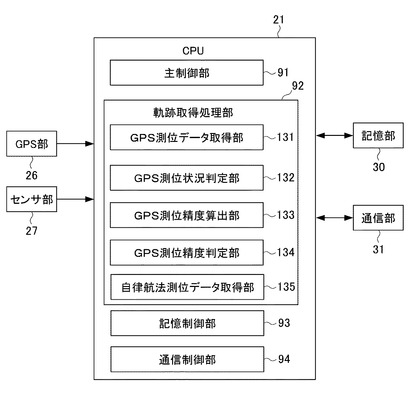
図7は、地図生成システムの機能的構成のうち、軌跡取得処理を実行するための機能的構成を示す機能ブロック図である。
「軌跡取得処理」とは、端末11から自機の移動の軌跡を取得する一連の処理である。
【0040】
端末11が軌跡取得処理を実行する場合には、図7に示すように、CPU21においては、主制御部91と、軌跡取得処理部92と、記憶制御部93と、通信制御部94と、が機能する。
詳細には、軌跡取得処理部92においては、GPS測位データ取得部131と、GPS測位状況判定部132と、GPS測位精度算出部133と、GPS測位精度判定部134と、自律航法測位データ取得部135と、が機能する。
【0041】
GPS測位データ取得部131は、GPS部26からGPS測位データを取得する。
GPS測位データ取得部131により取得されるGPS測位データは、測位された緯度経度の位置(以下、GPS測位位置という)に関するデータに対応付けられて当該GPS測位データが取得された時間(以下、GPS測位時間という)のデータ等のデータを含む。
【0042】
GPS測位状況判定部132は、GPS測位データ取得部131がGPS部26からGPS測位データを取得できたか否かを判定する。
【0043】
GPS測位精度算出部133は、GPS部26からGPS測位データのGPS測位精度を算出する。
【0044】
GPS測位精度判定部134は、GPS測位精度算出部133により算出されたGPS測位精度が高いか否かを判定する。即ち、GPS測位精度判定部134は、GPS測位データが使用できる精度であるか否かを判定し、GPS測位精度が高い場合には、GPS測位データを使用し、GPS測位精度が低い場合には、自律航法により測位データを使用する。
【0045】
自律航法測位データ取得部135は、GPS測位状況判定部132やGPS測位精度判定部134の判定結果に基づいて、センサ部27から自律航法測位データを取得する。
【0046】
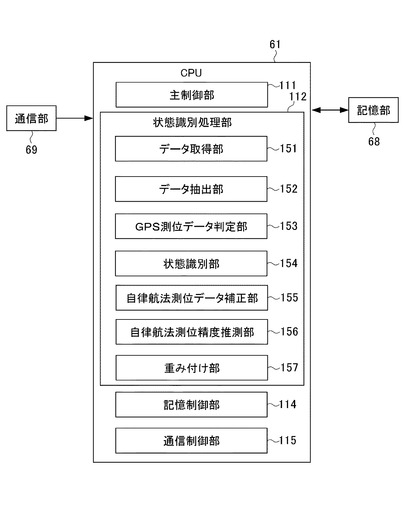
図8は、地図生成システムの機能的構成のうち、状態識別処理を実行するための機能的構成を示す機能ブロック図である。
「状態識別処理」とは、端末11から取得した端末11の軌跡に係る情報に基づいて、地図に反映するための状態、即ち、道や建築物の状態を識別する一連の処理である。なお、本実施形態において、「状態識別処理」には、GPS測位精度及び自律航法測位精度から測位データの重み付けを設定する一連の処理も含むように構成される。「測位データの重み付け」とは、測位データの信頼性を決定するためのものである。「測位データの重み付け」が低い場合には、測位データの信頼性は低くなり、生成される地図の信憑性が低いものとなる。このため、地図生成システムにおいては、多くの測位データにより生成することで地図の信憑性を高めることができる。
【0047】
サーバ12が状態識別処理を実行する場合には、図8に示すように、CPU61においては、主制御部111と、状態識別処理部112と、記憶制御部114と、通信制御部115と、が機能する。
詳細には、状態識別処理部112においては、データ取得部151と、データ抽出部152と、GPS測位データ判定部153と、状態識別部154と、自律航法測位データ補正部155と、自律航法測位精度推測部156と、重み付け部157と、が機能する。
【0048】
データ取得部151は、各種の測位データを取得する。詳細には、データ取得部151は、端末11から送信されたGPS測位データ及び当該GPS測位データに対応したGPS測位精度データ、自律航法測位データを取得する。
データ抽出部152は、自律航法測位データの前後のGPS測位データを抽出する。即ち、データ抽出部152は、自律航法測位データの開始と終わりの直近のGPS測位データを抽出する。
GPS測位データ判定部153は、データ抽出部152により抽出された自律航法測位データの前後のGPS測位データが一致しているか否かを判定する。詳細には、GPS測位データ判定部153は、自律航法測位データの前のGPS測位データと、自律航法測位データの後のGPS測位データとの測位位置を比較して、測位位置が一致しているか否かを判定する。
なお、本実施形態において、GPS測位データ判定部153により判定されるGPS測位データの一致とは、完全一致に加えて、ほぼ一致している場合、即ち、測位位置が近い場合も含むものとする。
【0049】
状態識別部154は、GPS測位データ判定部153の判定結果に基づいて、測位位置の状態を識別する。
具体的には、状態識別部154は、GPS測位データ判定部153によりGPS測位データが一致していると判定された場合には、「道以外」の状態であると識別する。即ち、識別の判断をした位置は、道以外に属しているものとして扱われる。なお、道以外の状態とは、例えば建築物内部のことである。
一方、状態識別部154は、GPS測位データ判定部153によりGPS測位データが一致していないと判定された場合には、「道」の状態であると識別する。即ち、識別の判断をした位置は、道に属しているものとして扱われる。
【0050】
自律航法測位データ補正部155は、前後のGPS測位データで自律航法測位データを補正する。即ち、自律航法測位データ補正部155は、自律航法測位データの前後のGPS測位データにより、自律航法測位データの位置を特定する補正を行う。
【0051】
自律航法測位精度推測部156は、前後のGPS測位データで自律航法測位データから、自律航法測位精度を推測する。即ち、自律航法測位精度推測部156は、自律航法による計測により連続して計測されている期間と、その前後でGPS測位精度算出部133により算出されたGPS測位精度データとに基づいて、自律航法測位精度データを推測する。
自律航法測位精度推測部15が実行する測位精度推測処理の詳細については、後述する。
【0052】
重み付け部157は、GPS測位データに対応するGPS測位精度及び自律航法測位データに対応する自律航法測位精度に基づいて、各測位データの重み付けを設定する。
【0053】
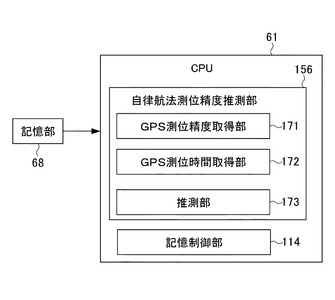
図9は、地図生成システムの機能的構成のうち、測位精度推測処理を実行するための機能的構成を示す機能ブロック図である。
サーバ12が測位精度推測処理を実行する場合には、図9に示すように、CPU61においては、自律航法測位精度推測部156と、記憶制御部114とが機能する。
詳細には、自律航法測位精度推測部156においては、GPS測位精度取得部171と、GPS測位時間取得部172と、推測部173と、が機能する。
【0054】
GPS測位精度取得部171は、記憶部68からGPS測位精度を取得する。
GPS測位時間取得部172は、記憶部68からGPS測位時間を取得する。
推測部173は、GPS測位精度取得部171により取得されたGPS測位精度及びGPS測位時間取得部172により取得されたGPS測位時間から、自律航法測位精度を推測する。
【0055】
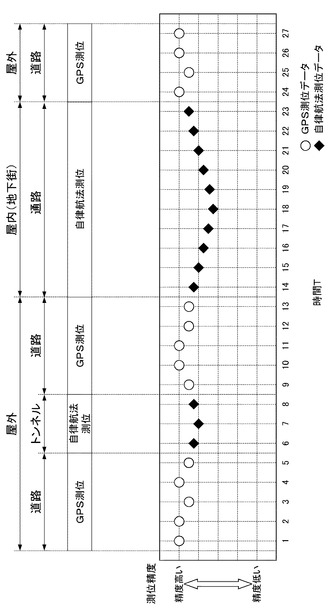
図10は、自律航法測位精度の推測の一例を示す模式図である。
図10の例では、屋外の道路からトンネルを通過して、屋内となる地下街の通路を通り、再び屋外の道路へと移動する。
【0056】
この場合、トンネル及び地下街を除く部分は、GPSによる測位が行われる(図中、GPS測位)。一方のトンネル及び地下街の部分は、自律航法による測位が行われる(図中、自律航法測位)。
自律航法による測位が行われた部分においては、測位の始点と終点の直近の測位精度に準じて自律航法による測位精度が決定される。また、自律航法による測位精度は、測位の始点と終点から離れれば離れるほど測位精度は低くなる。
【0057】
本例のトンネルに対応する自律航法の測位精度は、測位の始点(時刻t6)の前の直近のGPS測位精度(時刻t5)に準じて、測位精度が推測され、測位の終点(時刻t8)の後の直近のGPS測位精度(時刻t9)に準じて、測位精度が推測される。また、測位の始点(時刻t6)と、測位の終点(時刻t8)の間に位置する時刻7の測位精度は、測位の始点(時刻t6)と、測位の終点(時刻t8)に準じて決定される。
【0058】
また、本例の地下街に対応する自律航法の測位精度は、測位の始点(時刻t14)の前の直近のGPS測位精度(時刻t13)に準じて、測位精度が推測され、測位の終点(時刻23)の後の直近のGPS測位精度(時刻t24)に準じて、測位精度が推測される。
【0059】
また、測位の始点(時刻14)及び測位の終点(時刻t23)から最も離れる時刻t18及び時刻t19は、それぞれ、測位の始点(時刻14)及び測位の終点(時刻t23)の測位精度の変化に準じて決定される。即ち、GPS測位精度(時刻t13)から測位の始点(時刻t14)への低下具合に応じて、測位の始点(時刻t14)から離れるに従って測位精度が低下する。また、GPS測位精度(時刻t24)から測位の終点(時刻t23)への低下具合に応じて、測位の始点(時刻t23)から離れるに従って測位精度が低下する。それぞれ精度の低下の基準となる測位位置が異なるために、時刻t19が時刻t18よりも少し精度が高いこととなる。
【0060】
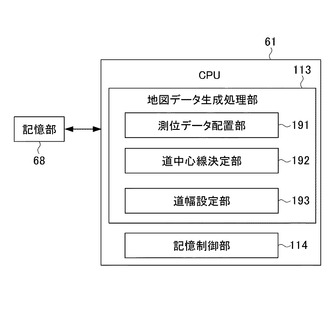
図11は、地図生成システムの機能的構成のうち、地図データ生成処理を実行するための機能的構成を示す機能ブロック図である。
サーバ12が地図生成処理を実行する場合には、CPU61においては、地図データ生成処理部113と、記憶制御部114が機能する。
【0061】
詳細には、地図データ生成処理部113においては、測位データ配置部191と、道中心線決定部192と、道幅設定部193と、が機能する。
【0062】
測位データ配置部191は、道路であると識別された軌跡データを地図の座標位置に対応して配置する。
道中心線決定部192は、地図において、軌跡配置部により配置された軌跡データを繋ぎ合わせて道路の中心線を決定する。
道幅設定部193は、道中心線決定部192により決定された道路の中心線に基づいて、道路の道幅を設定する。
【0063】
次に、図12乃至図16を参照して、このような図6の機能的構成を有する図2の端末11及び図3のサーバ12が実行する地図生成処理について説明する。
図12は、図2の端末11及び図3のサーバ12が実行する地図生成処理の流れを説明するフローチャートである。
地図生成処理が実行されると、端末11のCPU21、GPS部26、センサ部27、記憶部30及び通信部31において図6の各機能ブロックが機能すると共に、サーバ12のCPU61、記憶部68及び通信部69において図6の各機能ブロックが機能して、次のような処理が実行される。即ち、以下の各ステップの処理の動作主体は、ハードウェアでは端末11のCPU21、GPS部26、センサ部27、記憶部30及び通信部31、並びにサーバ12のCPU61、記憶部68及び通信部69が該当する。ただし、本発明の理解を容易なものとすべく、端末11のCPU21、GPS部26、センサ部27、記憶部30及び通信部31、並びにサーバ12のCPU61、記憶部68及び通信部69において機能する各機能ブロックが動作主体であるものとして、以下の各ステップの処理の説明をする。
地図生成処理は、端末11の入力部28に対して、地図生成処理の開始を指示する入力操作がなされたことを契機に開始する。
【0064】
ステップS1において、端末11の主制御部91及び軌跡取得処理部92は、軌跡取得処理を実行する。これにより、端末11は、自機の移動の軌跡を取得する。なお、軌跡取得処理の詳細については、図13を参照して後述する。
【0065】
ステップS2において、サーバ12の主制御部111及び状態識別処理部112は、状態識別処理を実行する。これにより、サーバ12は、軌跡取得処理において取得された軌跡に対応する場所の状態を識別する。なお、状態識別処理の詳細については、図14及び図15を参照して後述する。
【0066】
ステップS3において、サーバ12の地図データ生成処理部113は、地図データ生成処理を実行する。これにより、サーバ12は、状態識別処理において識別された場所の状態を既存の地図データに反映して新たに地図データを生成する。なお、地図データ生成処理の詳細については、図16を参照して後述する。地図データ生成処理されると、地図生成処理は終了する。
【0067】
次に、このような地図生成処理のうち、ステップS1の軌跡取得処理、ステップS2の状態識別処理、及びステップS3の地図データ生成処理の各々の処理の詳細について、その順番で個別に説明する。
【0068】
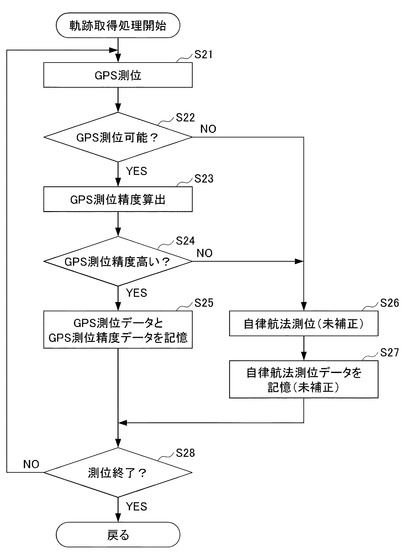
図13は、図12の地図生成処理のステップS1の軌跡取得処理の詳細な流れを説明するフローチャートである。
【0069】
ステップS21において、GPS測位データ取得部131は、GPS測位を行う。即ち、GPS測位データ取得部131は、GPS部26からGPS測位データを取得する。
【0070】
ステップS22において、GPS測位状況判定部132は、GPSが測位可能か否かを判定する。即ち、GPS測位状況判定部132は、GPS用衛星Stからの電波をGSP部27が受信して、GPS測位データ取得部131によりGPS測位データが取得されているか否かを判定する。
GPSが測位可能であると判定された場合には、ステップS22においてYESであると判定され、処理はステップS23に進む。
【0071】
ステップS23において、GPS測位精度算出部133は、GSP測位精度を算出する。即ち、GPS測位精度算出部133は、GPS測位データ取得部131により取得されたGPS測位データからGPS測位精度を算出する。
【0072】
ステップS24において、GPS測位精度判定部134は、GPS測位精度が高いか否かを判定する。即ち、GPS測位精度判定部134は、GPS測位精度算出部133により算出されたGPS測位精度が所定の精度よりも高いか否かを判定する。
GPS測位精度が高いと判定された場合には、ステップS24においてYESであると判定され、処理はステップS25に進む。
【0073】
ステップS25において、記憶制御部93は、GPS測位データと、GPS測位精度データとを記憶させるように記憶部30を制御する。その後処理は、ステップS28に進む。
【0074】
これに対して、GPS測位が可能でないと判定された場合には、ステップS22においてNOであると判定され、処理はステップS26に進む。これと同様に、GPS測位精度が低いと判定された場合にも、ステップS24においてNOであると判定され、処理はステップS26に進む。
【0075】
ステップS26において、自律航法測位データ取得部135は、自律航法の測位(未補正)を行う。即ち、自律航法測位データ取得部135は、センサ部27から自律航法測位データを取得する。この際、自律航法測位データ取得部135は、センサ部27からの自律航法測位データにあたり、GPS部26でのGPS測位データの取得からセンサ部27での自律航法測位データの取得に切り替える制御を行う。即ち、自律航法測位データ取得部135は、GPS部26の動作を停止させ、センサ部27での動作を開始させるように切り替える制御を行う。
【0076】
ステップS27において、記憶制御部93は、自律航法測位データ(未補正)を記憶させるように記憶部30を制御する。
【0077】
ステップS28において、主制御部91は、測位を終了する。即ち、主制御部91は、GPS測位データの取得又は自律航法測位データの取得を終了する制御を行う。この際、通信制御部94は、記憶部30に記憶される各種の測位データ(GPS測位データ、GPS測位精度データ及び自律航法測位データ)を、サーバ12に送信するように通信部31を制御する。
これにより、図12の地図生成処理のステップS1の軌跡取得処理が終了し、処理はステップS2に進む。
【0078】
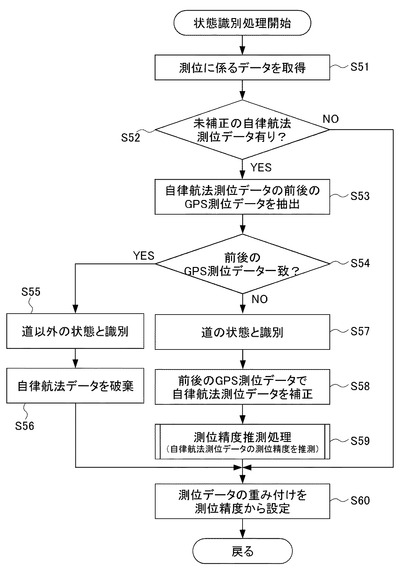
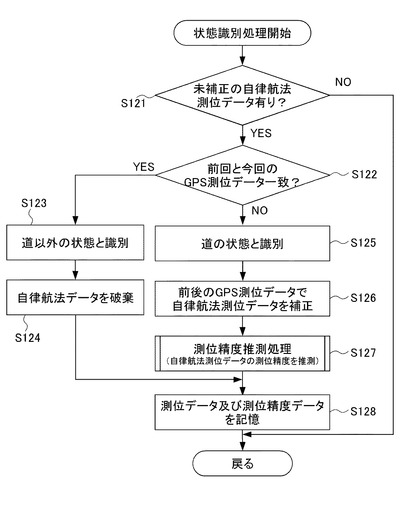
図14は、図12の地図生成処理のステップS2の状態識別処理の詳細な流れを説明するフローチャートである。
【0079】
ステップS52において、主制御部111は、未補正の自律航法測位データがあるか否かを判断する。即ち、主制御部111は、データ取得部151により取得されたデータのうち、自律航法測位データ(未補正)があるか否かを判断する。
未補正の自律航法測位データがある場合には、ステップS53においてYESであると判定され、処理はステップS53に進む。
【0080】
ステップS53において、データ抽出部152は、自律航法測位データの前後のGPS測位データを抽出する。即ち、データ抽出部152は、データ取得部151により取得されたデータのうち、取得された一連の自律航法測位データの始点及び終点の直近のGPS測位データを抽出する。
【0081】
ステップS53において、GPS測位データ判定部153は、前後のGPS測位データが一致しているか否かを判定する。即ち、GPS測位データ判定部153は、データ抽出部152により抽出された自律航法測位データの前後のGPS測位データの測位位置が一致しているか否かを判定する。
前後のGPS測位データが一致している場合には、ステップS54においてYESであると判定され、処理はステップS55に進む。
【0082】
ステップS55において、状態識別部154は、道以外の状態と識別する。即ち、状態識別部154は、GPS測位データ判定部153により、前後のGPS測位データが一致していると判定されたために、図4(b)の例の場合のように、道以外(建築物内部)の状態であると識別する。
【0083】
ステップS56において、主制御部111は、自律航法測位データを破棄する。即ち、主制御部111は、状態識別部154により自律航法測位データに対応する場所が道以外の建築物内部の状態として識別されたために、図4(c)の例のように、建築物内部の情報は必要なくなるために、自律航法測位データを破棄する。
【0084】
これに対して、前後のGPS測位データが一致していないと判定された場合には、ステップS54においてNOであると判定され、処理はステップS57に進む。
【0085】
ステップS57において、状態識別部154は、道の状態と識別する。即ち、状態識別部154は、GPS測位データ判定部153により、前後のGPS測位データが一致していないと判定されたために、図5(b)の例の場合のように、道の状態であると識別する。
【0086】
ステップS58において、自律航法測位データ補正部155は、前後のGPS測位データで自律航法測位データを補正する。即ち、自律航法測位データ補正部155は、自律航法測位データの前後のGPS測位データに準じて、自律航法の測位位置を補正する。詳細には、自律航法測位データ補正部155は、GPS測位データの測位位置に合わせて、自律航法の測位位置を決定する補正を行う。
【0087】
ステップS59において、自律航法測位精度推測部156は、測位精度推測処理を実行する。詳細には、自律航法測位精度推測部156は、自律航法測位データの測位精度を推測する。その後、推測された自律航法測位データの測位精度は、記憶制御部114により記憶部68に記憶される。なお、測位精度推測処理の詳細については、後述する。
測位精度推測処理が実行されることにより、処理はステップS60に進む。
これに対して、未補正の自律航法測位データがないと判定された場合には、ステップS52においてNOであると判定され、処理はステップS60に進む。
【0088】
ステップS60において、重み付け部157は、測位データの重み付けを測位精度から設定する。詳細には、重み付け部157は、データの信頼性の認識のために、GPS測位精度及び自律航法測位精度の高低の具合によって、GPS測位データ及び自律航法測位データに重み付けを行う。
これにより、図12の地図生成処理のステップS2の状態識別処理が終了し、処理はステップS3に進む。
【0089】
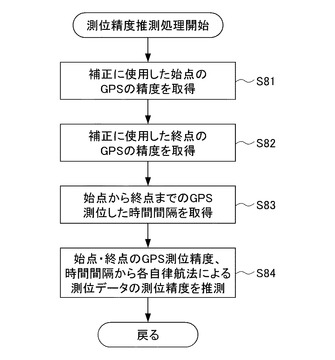
図15は、図14の地図生成処理のステップS59の測位精度推測処理の詳細な流れを説明するフローチャートである。
【0090】
ステップS81において、GPS測位精度取得部171は、補正に使用した始点のGPS測位精度を取得する。即ち、GPS測位精度取得部171は、図14のステップS58の補正で使用した自律航法測位データの始点の前のGPS測位データに対応するGPS測位精度を取得する。
【0091】
ステップS83において、GPS測位時間取得部172は、始点から終点までのGPS測位した時間を取得する。即ち、GPS測位時間取得部172は、自律航法測位データの始点から終点までの時間を、GPS測位データの取得時間から取得する。詳細には、GPS測位時間取得部172は、自律航法測位データの始点と終点の直近のGPS測位データの測位時間の差分から、自律航法測位データの始点から終点までのGPSの測位した時間を取得する。
【0092】
ステップS84において、推測部173は、始点・終点のGPS測位精度及び時間間隔から各自律航法測位データの測位精度を推測する。即ち、図10の例で示すように、推測部173は、自律航法測位データの始点及び終点の直近のGPS測位データの測位精度に準じて、自律航法測位データの始点及び終点の測位精度を推測する。次いで、時間間隔から他の自律航法測位データの測位精度を推測する。
これにより、測位精度推測処理は、終了して、図14における処理はステップS60に進む。
【0093】
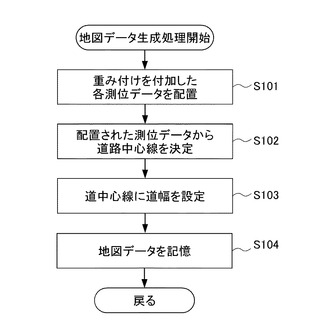
図16は、図12の地図生成処理のステップS3の地図データ生成処理の詳細な流れを説明するフローチャートである。
【0094】
ステップS101において、測位データ配置部191は、重み付けをした各測位データを配置する。即ち、測位データ配置部191は、図5(b)の例のように、既存の地図上にGPS測位データ及び自律航法測位データを配置する。
【0095】
ステップS102において、道中心線決定部192は、配置された各測位データから道の中心線を決定する。
ステップS103において、道幅設定部193は、道中心線に基づいて、道幅を設定する。
ステップS104において、記憶制御部114は、道が追加された地図データを記憶部68に記憶する。
これにより、地図データ生成処理は終了し、地図生成処理の一連の処理は終了する。
【0096】
次に、本発明の第2の実施形態について説明する。
図17は、本発明の第2の実施形態に係る地図生成システムの機能的構成のうち、地図生成処理を実行するための機能的構成を示す機能ブロック図である。なお、第1実施形態と同一の符号を用いて説明し、第1実施形態で説明した構成については、その説明を省略する。
【0097】
上述した実施形態(第1の実施形態)では、状態識別処理をサーバ12で実行するように構成した。
これに対して、第2の実施形態の地図生成システムでは、状態識別処理を端末11で実行するように構成する。このため、第2の実施形態の地図生成システムでは、図17に示すように状態識別処理を行うための機能的構成である状態識別部95が端末11で機能するように構成する。
【0098】
図18は、第2の実施形態に係る状態識別処理の詳細な流れを説明するフローチャートである。
上述したように、第2の実施形態の地図生成システムでは、状態識別処理を端末11で実行するように構成する。このため、端末11では、測位データの取得に並行して、状態識別処理を行うために、測位データのやり取りの処理(図14のステップS51に相当する処理)や、測位データの抽出の処理(図14のステップS53に相当する処理)が不要になる。
なお、本実施形態においては、測位データの重み付けを測位精度データから設定する処理(図14のステップS58に相当する処理)については、サーバ12で実行させるように構成する。
【0099】
以上のように構成される地図生成システムにおいては、ネットワークNを介して相互に接続される端末11及びサーバ12を備える。
端末11又はサーバ12は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された複数の測位位置のデータを取得する。
また、端末11又はサーバ12は、端末11により取得された複数の測位位置のデータに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末11の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を判別する。
【0100】
従って、地図生成システムにおいては、端末11又はサーバ12は、端末11により取得された複数の測位位置のデータに基づいて、第1の測位位置と第2の測位位置との間の距離により、第1の測位位置と第2の測位位置との間の場所の状態を判別する。これにより、地図生成システムにおいては、取得した軌跡から軌跡が位置する場所の状態を識別することができる。
【0101】
また、地図生成システムは、軌跡取得処理部92と、状態識別処理部112とを備える。
軌跡取得処理部92は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された複数の測位位置のデータを取得する。
状態識別処理部112は、軌跡取得処理部92により取得された複数の測位位置のデータに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末11の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を判別する。
【0102】
従って、地図生成システムにおいては、状態識別処理部112は、軌跡取得処理部92により取得された複数の測位位置のデータに基づいて、第1の測位位置と第2の測位位置との間の距離により、第1の測位位置と第2の測位位置との間の場所の状態を判別する。これにより、地図生成システムにおいては、取得した軌跡から軌跡が位置する場所の状態を識別することができる。
【0103】
また、状態識別処理部112は、求めた距離が閾値以上である場合には、場所の状態は、道が存在する状態であると識別し、求めた距離が閾値未満である場合には、場所の状態は、建築物が存在する状態であると識別する。
従って、地図生成システムにおいては、軌跡が属する場所の状態を道又は建築物のいずれかの状態として判別することができる。
【0104】
端末11は、現在位置が測位される位置測位に加えてさらに、移動方向及び移動量が計測される自律航法による計測が行われ、GPSによる位置測位の測位状態に基づいて、GPSによる位置測位と自律航法による計測とが切り替えられる。
状態識別処理部112は、GPSによる位置測位と自律航法による計測との切り替えに基づいて、端末11の現在位置の測位の可能または不能を判断する。
従って、地図生成システムにおいては、例えばGPSの電波が受信できない等のGPSによる位置測位ができない場合には、自律航法による計測に切り替えられることをもって、端末11の現在位置の測位の可能または不能を判断することができる。
【0105】
また、地図生成システムにおいては、自律航法による計測により計測された移動方向及び移動量が、基準点となるGPSの測位位置に積算されて、端末11の現在位置を示す自律航法測位データが生成される。
また、地図生成システムにおいては、GPS測位精度算出部133と、自律航法測位精度推測部156とを備える。
GPS測位精度算出部133は、GPS測位データの精度を算出する。
自律航法測位精度推測部156は、自律航法測位データの精度を算出する。
記憶制御部114は、GPS測位データと精度とを対応付けて記憶媒体に記憶させると共に、自律航法測位データと精度とを対応付けて記憶部68に記憶させる。
従って、地図生成システムにおいては、各位置のデータと精度のデータとを対応付けて記憶することができる。
【0106】
また、地図生成システムにおいては、記憶制御部114により記憶が制御されたGPS測位データと自律航法測位データとを、各々の精度に対応した重み付けを行う重み付け部157をさらに備える。
従って、GPS測位データと自律航法測位データとが重み付けされることにより、重み付けによりGPS測位データと自律航法測位データの信頼性を確認することができる。また、信頼性が低いGPS測位データと自律航法測位データが該当する場所においては、さらにデータを取得することにより、信頼性を高めることができる。
【0107】
自律航法測位精度推測部156は、自律航法による計測により連続して計測されている期間と、その前後でGPS測位精度算出部133により算出されたGPS測位精度データとに基づいて、自律航法測位精度データを推測する。
従って、地図生成システムにおいては、取得したGPS測位データから、自律航法測位精度データを取得することができる。
【0108】
また、地図生成システムにおいては、状態識別処理部112により識別された場所の状態を反映させた地図を示す地図データを生成する地図データ生成処理部113をさらに備える。
【0109】
なお、本発明は、上述の実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
【0110】
また、上述の実施形態では、道状態でないと判定された場合、センサ部27のデータは無視して、削除等を行っていたが、これに限られない。例えば、センサ部27のデータに基づいて、道でない領域、即ち、建築物内部の形状を特定してもよい。
【0111】
また、上述の実施形態では、軌跡取得処理、状態識別処理及び地図データ生成処理の各処理を、第1の実施形態では軌跡の取得を端末11で実行すると共に、状態の識別及び地図データの生成をサーバ12で実行し、第2の実施形態では軌跡の取得及び状態の識別を端末11で実行すると共に、状態の識別及び地図データの生成をサーバ12で実行するように構成したがこれに限られない。各処理は、端末11又はサーバ12のいずれかで実行するように構成してもよい。
【0112】
上述した一連の処理は、ハードウェアにより実行させることもできるし、ソフトウェアにより実行させることもできる。
換言すると、図2及び図3の機能的構成は例示に過ぎず、特に限定されない。即ち、上述した一連の処理を全体として実行できる機能が端末11及びサーバ12に備えられていれば足り、この機能を実現するためにどのような機能ブロックを用いるのかは特に図2及び図3の例に限定されない。
また、1つの機能ブロックは、ハードウェア単体で構成してもよいし、ソフトウェア単体で構成してもよいし、それらの組み合わせで構成してもよい。
【0113】
一連の処理をソフトウェアにより実行させる場合には、そのソフトウェアを構成するプログラムが、コンピュータ等にネットワークや記録媒体からインストールされる。
コンピュータは、専用のハードウェアに組み込まれているコンピュータであってもよい。また、コンピュータは、各種のプログラムをインストールすることで、各種の機能を実行することが可能なコンピュータ、例えば汎用のパーソナルコンピュータであってもよい。
【0114】
このようなプログラムを含む記録媒体は、ユーザにプログラムを提供するために装置本体とは別に配布される図2及び図3のリムーバブルメディア41、81により構成されるだけでなく、装置本体に予め組み込まれた状態でユーザに提供される記録媒体等で構成される。リムーバブルメディア41、81は、例えば、磁気ディスク(フロッピディスクを含む)、光ディスク、又は光磁気ディスク等により構成される。光ディスクは、例えば、CD−ROM(Compact Disk−Read Only Memory),DVD(Digital Versatile Disk)等により構成される。光磁気ディスクは、MD(Mini−Disk)等により構成される。また、装置本体に予め組み込まれた状態でユーザに提供される記録媒体は、例えば、プログラムが記録されている図2及び図3のROM22、62や、図2及び図3の記憶部30、68に含まれるハードディスク等で構成される。
【0115】
なお、本明細書において、記録媒体に記録されるプログラムを記述するステップは、その順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的或いは個別に実行される処理をも含むものである。
また、本明細書において、システムの用語は、複数の装置や複数の手段などより構成される全体的な装置を意味するものとする。
【0116】
以上、本発明のいくつかの実施形態について説明したが、これらの実施形態は、例示に過ぎず、本発明の技術的範囲を限定するものではない。本発明はその他の様々な実施形態を取ることが可能であり、さらに、本発明の要旨を逸脱しない範囲で、省略や置換等種々の変更を行うことができる。これら実施形態やその変形は、本明細書等に記載された発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【0117】
以下に、本願の出願当初の特許請求の範囲に記載された発明を付記する。
[付記1]
時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータを取得する取得手段と、
前記取得手段により取得された前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する状態判別手段と、
を備えることを特徴とする測位場所識別装置。
[付記2]
前記状態判別手段は、
求めた前記距離が閾値以上である場合には、前記場所の状態は、道が存在する状態であると識別し、
求めた前記距離が閾値未満である場合には、前記場所の状態は、建築物が存在する状態であると識別する、
ことを特徴とする付記1に記載の測位場所識別装置。
[付記3]
前記端末においては、
前記現在位置が測位される位置測位に加えてさらに、移動方向及び移動量が計測される移動計測が行われ、
前記位置測位の測位状態に基づいて、前記位置測位と前記移動計測とが切り替えられ、
前記状態判別手段は、前記位置測位と前記移動計測との切り替えに基づいて、前記端末の現在位置の測位の可能または不能を判断する、
付記1又は2に記載の測位場所識別装置。
[付記4]
前記移動計測により計測された前記移動方向及び前記移動量が、基準点となる前記測位位置に積算されて、前記端末の現在位置を示す算出位置のデータが生成され、
前記測位場所識別装置は、
前記測位位置のデータの精度を取得する位置精度取得手段と、
前記算出位置のデータの精度を算出する位置精度算出手段と、
前記測位位置のデータと前記精度とを対応付けて記憶媒体に記憶させると共に、前記算出位置のデータと前記精度とを対応付けて前記記憶媒体に記憶させる記憶制御手段と、
をさらに備えることを特徴とする付記3に記載の測位場所識別装置。
[付記5]
前記記憶制御手段により記憶が制御された前記測位位置のデータと前記算出位置のデータとを、各々の精度に対応した重み付けを行って統合する統合手段と、
をさらに備えることを特徴とする付記4に記載の測位場所識別装置。
[付記6]
前記位置精度算出手段は、前記移動計測により連続して計測されている期間と、その前後で前記位置精度取得手段により測位された前記測位位置のデータの精度とに基づいて、前記算出位置のデータの精度を算出する、
ことを特徴とする付記5に記載の測位場所識別装置。
[付記7]
前記状態判別手段により判別された前記場所の状態を反映させた地図を示す地図データを生成する地図生成手段
をさらに備えることを特徴とする付記1乃至6のいずれか1つに記載の測位場所識別装置。
[付記8]
当該測位場所識別装置は、前記端末により構成される、
ことを特徴とする付記1乃至7のいずれか1つに記載の測位場所識別装置。
[付記9]
当該測位場所識別装置は、前記端末とネットワークを介して相互に接続されるサーバにより構成される、
ことを特徴とする付記1乃至7のいずれか1つに記載の測位場所識別装置。
[付記10]
時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータに基づいて場所の状態を判別する測位場所識別装置が実行する測位場所識別方法であって、
前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する状態判別ステップを
含むことを特徴とする測位場所識別方法。
[付記11]
時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータを処理するコンピュータに、
前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する状態判別手段
として機能させることを特徴とするプログラム。
[付記12]
ネットワークを介して相互に接続される端末及びサーバを備える測位場所識別システムにおいて、
前記端末又は前記サーバが、時間方向に離間して、前記端末の現在位置としてそれぞれ測位された複数の測位位置のデータを取得し、
前記端末又は前記サーバが、前記端末により取得された前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を識別する、
ことを特徴とする測位場所識別システム。
【符号の説明】
【0118】
11・・・端末,12・・・サーバ,21・61・・・CPU,22・62・・・ROM,23・63・・・RAM,24・64・・・バス,25・65・・・入出力インターフェース,26・・・GPS部,27・・・センサ部,28・66・・・入力部,29・67・・・出力部,30・68・・・記憶部,31・69・・・通信部,32・70・・・ドライブ,33・・・バッテリ,41・81・・・リムーバブルメディア,91・・・主制御部,92・・・軌跡取得処理部,93・・・記憶制御部,94・・・通信制御部,111・・・主制御部,112・・・状態識別処理部,113・・・地図データ生成処理部,114・・・記憶制御部,115・・・通信制御部,131・・・GPS測位データ取得部,132・・・GPS測位状況判定部,133・・・GPS測位精度算出部,134・・・GPS測位精度判定部,135・・・自律航法測位データ取得部,151・・・データ取得部,152・・・データ抽出部,153・・・GPS測位データ判定部,154・・・状態識別部,155・・・自律航法測位データ補正部,156・・・自律航法測位精度推測部,157・・・重み付け部,171・・・GPS測位精度取得部,172・・・GPS測位時間取得部,173・・・推測部,191・・・測位データ配置部,192・・・道中心線決定部,193・・・道幅設定部
【技術分野】
【0001】
本発明は、測位場所識別装置、測位場所識別方法、プログラム及び測位場所識別システムに関する。
【背景技術】
【0002】
従来より端末等の移動体の軌跡から地図を自動的に生成する技術が考えられている。例えば特許文献1は、移動体の軌跡を道として識別し、また、移動体の状態の変化から階段や扉等の地物の属性を識別する。そして、識別した道や地物の属性から地図を自動的に生成する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−333998号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術では、移動体の軌跡すべてを道として識別してしまうため、取得した軌跡の場所の識別、例えば、軌跡が属する場所が道かそれ以外の建築物内部かの識別は非常に困難であった。
【0005】
本発明は、このような状況に鑑みてなされたものであり、取得した軌跡から軌跡が位置する場所の状態を識別することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一態様の測位場所識別装置は、時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータを取得する取得手段と、前記取得手段により取得された前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を識別する状態識別手段と、を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、取得した軌跡から軌跡が位置する場所の状態を識別することができる。
【図面の簡単な説明】
【0008】
【図1】本発明に係る測位場所識別装置を用いたシステムの一実施形態としての地図生成システムの構成を示すシステム構成図である。
【図2】図1の地図生成システムのうちの端末のハードウェア構成を示すブロック図である。
【図3】図1の地図生成システムのうちのサーバ12のハードウェア構成を示すブロック図である。
【図4】状態の識別のうち、道以外の状態の識別の原理を説明する模式図である。
【図5】状態の識別のうち、道の状態の識別の原理を説明する模式図である。
【図6】図1の地図生成システムの機能的構成のうち、地図生成処理を実行するための機能的構成を示す機能ブロック図である。
【図7】図1の地図生成システムの機能的構成のうち、軌跡取得処理を実行するための機能的構成を示す機能ブロック図である。
【図8】図1の地図生成システムの機能的構成のうち、状態識別処理を実行するための機能的構成を示す機能ブロック図である。
【図9】図1の地図生成システムの機能的構成のうち、自律航法測位精度推測処理を実行するための機能的構成を示す機能ブロック図である。
【図10】自律航法測位精度の推測を説明するための模式図である。
【図11】図1の地図生成システムの機能的構成のうち、地図データ生成処理を実行するための機能的構成を示す機能ブロック図である。
【図12】図2の端末及び図3の地図生成装置が実行する地図生成処理の流れを説明するフローチャートである。
【図13】図12の地図生成処理のステップS1の軌跡取得処理の詳細な流れを説明するフローチャートである。
【図14】図12の地図生成処理のステップS2の状態識別処理の詳細な流れを説明するフローチャートである。
【図15】図14の地図生成処理のステップS59の測位精度推測処理の詳細な流れを説明するフローチャートである。
【図16】図12の地図生成処理のステップS3の地図描画処理の詳細な流れを説明するフローチャートである。
【図17】本発明の第2の実施形態に係る地図生成システムの構成を示すシステム構成図である。
【図18】第2の実施形態に係る状態識別処理の詳細な流れを説明するフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を用いて説明する。
【0010】
図1は、本発明に係る測位場所識別システムの一実施形態としての地図生成システムの構成を示すシステム構成図である。
図1の例では、地図生成システムは、3台の端末11A乃至11Cと、サーバ12と、がネットワークNを介して相互に接続されることで構成されている。
なお以下、端末11A乃至11Cを個々に区別する必要がない場合、これらをまとめて、「端末11」と単に呼ぶ。このように符号の最後のアルファベットを省略して呼称している場合には、端末11の構成要素に付される符号の最後のアルファベットも省略する。
【0011】
端末11は、上空にある数個のGPS(Global Positioning System、全地球測位システム)用衛星Stからの信号を受け取り、自機の位置を測位することができるように、GPSでの運用が可能な機能を有している。また、端末11は、端末11の移動に伴う移動量等を取得可能な機能を有している。
端末11は、これらの機能を使って、自機の位置情報を取得して、サーバ12に送信する。なお、図1には、3台の端末11が図示されているが、これは例示に過ぎない。1台であっても本システムは運用可能であり、また、地図の拡充や精度の向上を図るために3台以上の端末11を使用してもよい。
【0012】
サーバ12は、インターネット等のネットワークNを介して、端末11等と情報の授受ができる機能を有している。サーバ12は、端末11から位置情報を受信して、端末11からの位置情報に基づいて、既知の地図に建築物や道の情報を追加することで、新たな地図を示す地図データを生成する。
【0013】
図2は、図1の地図生成システムのうちの端末11のハードウェア構成を示すブロック図である。
【0014】
端末11は、CPU(Central Processing Unit)21と、ROM(Read Only Memory)22と、RAM(Random Access Memory)23と、バス24と、入出力インターフェース25と、GPS部26と、センサ部27と、入力部28と、出力部29と、記憶部30と、通信部31と、ドライブ32と、バッテリ33を備えている。
【0015】
CPU21は、ROM22に記録されているプログラム、又は、記憶部30からRAM23にロードされたプログラムに従って各種の処理を実行する。
【0016】
RAM23には、CPU21が各種の処理を実行する上において必要なデータ等も適宜記憶される。
【0017】
CPU21、ROM22及びRAM23は、バス24を介して相互に接続されている。このバス24にはまた、入出力インターフェース25も接続されている。入出力インターフェース25には、入力部28、出力部29、記憶部30、通信部31及びドライブ32が接続されている。
【0018】
GPS部26は、GPS受信アンテナを介して、複数のGPS用衛星StからのGPS信号を受信する。CPU21は、GPS部26が受信したGPS信号に基づいて、端末11の現在位置を示す緯度及び経度、高度のデータ(以下、「測位位置のデータ」とも適宜呼ぶ)を算出する。
【0019】
センサ部27は、端末11の状態の変化を移動量として計測する。本実施形態において、センサ部27は、3軸地磁気センサと、3軸加速度センサとにより構成される。
3軸地磁気センサは、例えば外部磁界の変動に応じてインピーダンスが変化するMI素子を用いて検出した地磁気の3軸(X,Y,Z)成分を表す3軸地磁気データを出力する。
3軸加速度センサは、ピエゾ抵抗型もしくは静電容量型の検出機構により3軸加速度成分を検出して3軸成分毎の加速度データを出力する。なお、3軸加速度センサにより検出される3軸成分は、3軸地磁気センサの3軸(X,Y,Z)成分にそれぞれ対応する。
【0020】
入力部28は、各種釦等で構成され、ユーザの指示操作に応じて各種情報を入力する。
出力部29は、ディスプレイやスピーカ等で構成され、画像や音声を出力する。
記憶部30は、ハードディスク或いはDRAM(Dynamic Random Access Memory)等で構成され、各種情報のデータを記憶する。記憶部30は、例えば、端末11の軌跡に係るデータ、地図の生成に係るデータを記憶する。
通信部31は、他の端末11やサーバ12を含む他の装置との間で、インターネットを含むネットワークNを介して行う通信を制御する。
【0021】
ドライブ32には、磁気ディスク、光ディスク、光磁気ディスク、或いは半導体メモリ等よりなる、リムーバブルメディア41が適宜装着される。ドライブ32によってリムーバブルメディア41から読み出されたプログラムは、必要に応じて記憶部30にインストールされる。また、リムーバブルメディア41は、記憶部30に記憶されている情報のデータ等の各種データも、記憶部30と同様に記憶することができる。
【0022】
バッテリ33は、例えば、リチウムイオン二次電池により構成され、端末11に駆動用の電力を供給する電力供給源である。
【0023】
図3は、図1の地図生成システムのうちのサーバ12のハードウェア構成を示すブロック図である。
【0024】
サーバ12は、CPU61〜ドライブ70を備えている。CPU61〜ドライブ70の各々は、上述した図2のCPU21〜ドライブ32の各々と基本的に同様の機能と構成を有している。従って、CPU61〜ドライブ70の個々の説明は、ここでは省略する。
【0025】
以上のように構成される地図生成システムにおいては、サーバ12は、移動する端末11により逐次取得される複数の現在位置のデータから、当該端末11の移動の軌跡を特定し、当該軌跡に基づいて道や建築物内部を識別して、識別した道や建築物内部を含む地図を示す地図データを生成する。なお、本実施形態において、地図データの生成とは、地図データを最初から生成することに加えて、既存の地図データを修正して新たな地図データを生成し直すことも含むものとする。以下の実施形態においては、既存の地図に道や建築物内部を追加する修正を行うことで、新たな地図データとして生成する例について説明する。
【0026】
本例では、サーバ12は、端末11により取得された複数の測位位置のデータ(GPSデータ)に基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて第1の測位位置と第2の測位位置との間の場所の状態を判別する。
なお、場所の状態は、特に限定されないが、本実施形態では、道が存在する状態と、建築物内部との2種類が存在するものとして、以下の説明をする。
【0027】
次に、軌跡が属する場所の状態を識別する原理について、図4及び図5を参照しながら以下説明する。
まず、状態の識別のうち、道以外の状態、即ち建築物内部を識別する原理について図4を参照しながら説明し、次いで、状態の識別のうち、道が存在する状態を識別する原理について図5を参照しながら説明する。
ここで、軌跡とは、GPS又は自律航法により取得された測位位置の集合であり、端末の測位位置の変遷から導き出される端末保持者の移動経路のことである。
【0028】
図4は、場所の状態の識別のうち、道以外の状態の識別の原理を説明する模式図で、(a)は端末保持者が建築物への出入りした実際の動作の一例を示した模式図であり、(b)は(a)の例における軌跡をその場所に配置した場合の一例を示した模式図であり、(c)は(b)から生成した地図の一例を示す模式図である。
【0029】
図4(a)の例では、端末保持者が建築物への出入りする場合を示している。この場合には、建築物の外では、GPS用衛星Stからの電波の受信が可能なため、GPSにより位置が測位されて自機の軌跡が取得される。その後、建築物に入った場合には、GPS用衛星Stからの電波が受信できなくなるために、GPSによる測位の代わりに、自律航法により取得した移動方向及び移動量から自機の軌跡を割り出す。
【0030】
従って、このように取得された自機の軌跡を地図上に展開すると、図4(b)に示したようになり、丸印のGPSの軌跡の先に、2点鎖線の自律航法の軌跡が円弧状に表示され、円弧の端部にさらに、丸印のGPSの軌跡が表示されることとなる。
【0031】
図4(b)の表示結果の状態を識別すると、GPSにより測位された軌跡を道の状態を識別し、自律航法により測位された軌跡の前後のGPSにより測位された位置(第1の測位位置及び第2の測位位置)が近いことから自律航法により測位された軌跡の部分は建築物内部と識別する。この識別結果を地図上に描画すると、図4(c)に示すように、建築物と建築物につながっている2つの道を生成させることができる。
【0032】
図5は、状態の識別のうち、道の状態の識別の原理を説明する模式図で、(a)は端末保持者がトンネルに入ってから出るまでの実際の動作の一例を示した模式図であり、(b)は(a)の例における軌跡をその場所に配置した場合の一例を示した模式図であり、(c)は(b)から生成した地図の一例を示す模式図である。
【0033】
図5(a)の例では、端末保持者がトンネルに入ってから出るまでの場合を示している。この場合には、トンネルの外では、GPS用衛星Stからの電波の受信が可能なため、GPSにより位置が測位されて自機の軌跡が取得される。その後、トンネルに入った場合には、GPS用衛星Stからの電波が受信できなくなるために、GPSによる測位の代わりに、自律航法により取得した移動方向及び移動量から自機の軌跡を割り出す。
【0034】
従って、このように取得された自機の軌跡を地図上に展開すると、図5(b)に示したようになり、丸印のGPSの軌跡の先に、2点鎖線の自律航法の軌跡が直線状に表示され、直線の先に、丸印のGPSの軌跡が表示されることとなる。
【0035】
図5(b)の表示結果の状態を識別すると、GPSにより測位された軌跡を道の状態を識別し、自律航法により測位された軌跡の前後のGPSにより測位された位置(第1の測位位置及び第2の測位位置)が遠いことから自律航法により測位された軌跡の部分はトンネルの内部の道と識別にする。この識別結果を地図上に描画すると、図5(c)に示すように、トンネルを通過する道を生成させることができる。
【0036】
図6は、このような地図生成システムの機能的構成のうち、地図生成処理を実行するための機能的構成を示す機能ブロック図である。
「地図生成処理」とは、端末11から取得した端末11の軌跡に基づいて、地図を生成するまでの一連の処をいう。「地図生成処理」は、具体的な処理として、端末11で軌跡取得処理及び状態識別処理を行い、サーバ12で地図データ生成処理を行う。
なお、図6は、本発明が適用される測位場所識別装置がサーバ12により構成されている場合の機能的構成例を示している。当然、本発明が適用される測位場所識別装置は端末11により構成されてもよいが、この場合の機能的構成については図17を参照して後述する。
【0037】
端末11が地図生成処理を実行する場合には、図6に示すように、CPU21においては、主制御部91と、軌跡取得処理部92と、記憶制御部93と、通信制御部94と、が機能する。
主制御部91は、地図生成処理のうち、軌跡取得処理の実行全体を制御する。
軌跡取得処理部92は、端末11の移動の軌跡を取得する処理を行う。詳細には、軌跡取得処理部92は、GPS部26からGSP用衛星Stの電波が受信可能な屋外における移動の軌跡を取得し、センサ部27から端末11の状態変化を取得する。即ち、軌跡取得処理部92は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された測位位置のデータを取得する。
軌跡取得処理部92が実行する軌跡取得処理の詳細については後述する。
記憶制御部93は、例えば端末11の軌跡に係るデータ(端末11の現在位置としてそれぞれ測位されたGPS測位データ及び自律航法測位データ)等の各種データを記憶するように記憶部30を制御する。
通信制御部94は、例えば端末11の軌跡に係るデータ等の各種データを送受信するように通信部31を制御する。
【0038】
また、サーバ12が地図生成処理を実行する場合には、図6に示すように、CPU61においては、主制御部111と、状態識別処理部112と、地図データ生成処理部113と、記憶制御部114と、通信制御部115と、が機能する。
主制御部111は、地図生成処理のうち、状態識別処理及び地図データ生成処理の実行全体を制御する。
状態識別処理部112は、端末11から通信部69を介して受信した軌跡の情報に基づいて、軌跡が属するその場所の状態を識別する。詳細には、状態識別処理部112は、軌跡に対応する領域が道か道以外かの状態を識別する。即ち、状態識別処理部112は、軌跡取得処理部92により取得された複数の測位位置のデータに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末11の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を識別する。
状態識別処理部112が実行する状態識別処理の詳細については後述する。
地図データ生成処理部113は、状態識別処理部112により識別された状態を地図に反映、即ち、地図に道と道以外の状態を描画する。即ち、地図データ生成処理部113は、状態識別処理部112により識別された場所の状態を反映させた地図を示す地図データを生成する。
地図データ生成処理部113が実行する地図データ生成処理の詳細については後述する。
記憶制御部114は、例えば取得した端末11の軌跡に係るデータ、地図の生成に係るデータ等の各種データを記憶するように記憶部68を制御する。
通信制御部115は、例えば端末11の軌跡に係るデータ等の各種データを送受信するように通信部69を制御する。
【0039】
図7は、地図生成システムの機能的構成のうち、軌跡取得処理を実行するための機能的構成を示す機能ブロック図である。
「軌跡取得処理」とは、端末11から自機の移動の軌跡を取得する一連の処理である。
【0040】
端末11が軌跡取得処理を実行する場合には、図7に示すように、CPU21においては、主制御部91と、軌跡取得処理部92と、記憶制御部93と、通信制御部94と、が機能する。
詳細には、軌跡取得処理部92においては、GPS測位データ取得部131と、GPS測位状況判定部132と、GPS測位精度算出部133と、GPS測位精度判定部134と、自律航法測位データ取得部135と、が機能する。
【0041】
GPS測位データ取得部131は、GPS部26からGPS測位データを取得する。
GPS測位データ取得部131により取得されるGPS測位データは、測位された緯度経度の位置(以下、GPS測位位置という)に関するデータに対応付けられて当該GPS測位データが取得された時間(以下、GPS測位時間という)のデータ等のデータを含む。
【0042】
GPS測位状況判定部132は、GPS測位データ取得部131がGPS部26からGPS測位データを取得できたか否かを判定する。
【0043】
GPS測位精度算出部133は、GPS部26からGPS測位データのGPS測位精度を算出する。
【0044】
GPS測位精度判定部134は、GPS測位精度算出部133により算出されたGPS測位精度が高いか否かを判定する。即ち、GPS測位精度判定部134は、GPS測位データが使用できる精度であるか否かを判定し、GPS測位精度が高い場合には、GPS測位データを使用し、GPS測位精度が低い場合には、自律航法により測位データを使用する。
【0045】
自律航法測位データ取得部135は、GPS測位状況判定部132やGPS測位精度判定部134の判定結果に基づいて、センサ部27から自律航法測位データを取得する。
【0046】
図8は、地図生成システムの機能的構成のうち、状態識別処理を実行するための機能的構成を示す機能ブロック図である。
「状態識別処理」とは、端末11から取得した端末11の軌跡に係る情報に基づいて、地図に反映するための状態、即ち、道や建築物の状態を識別する一連の処理である。なお、本実施形態において、「状態識別処理」には、GPS測位精度及び自律航法測位精度から測位データの重み付けを設定する一連の処理も含むように構成される。「測位データの重み付け」とは、測位データの信頼性を決定するためのものである。「測位データの重み付け」が低い場合には、測位データの信頼性は低くなり、生成される地図の信憑性が低いものとなる。このため、地図生成システムにおいては、多くの測位データにより生成することで地図の信憑性を高めることができる。
【0047】
サーバ12が状態識別処理を実行する場合には、図8に示すように、CPU61においては、主制御部111と、状態識別処理部112と、記憶制御部114と、通信制御部115と、が機能する。
詳細には、状態識別処理部112においては、データ取得部151と、データ抽出部152と、GPS測位データ判定部153と、状態識別部154と、自律航法測位データ補正部155と、自律航法測位精度推測部156と、重み付け部157と、が機能する。
【0048】
データ取得部151は、各種の測位データを取得する。詳細には、データ取得部151は、端末11から送信されたGPS測位データ及び当該GPS測位データに対応したGPS測位精度データ、自律航法測位データを取得する。
データ抽出部152は、自律航法測位データの前後のGPS測位データを抽出する。即ち、データ抽出部152は、自律航法測位データの開始と終わりの直近のGPS測位データを抽出する。
GPS測位データ判定部153は、データ抽出部152により抽出された自律航法測位データの前後のGPS測位データが一致しているか否かを判定する。詳細には、GPS測位データ判定部153は、自律航法測位データの前のGPS測位データと、自律航法測位データの後のGPS測位データとの測位位置を比較して、測位位置が一致しているか否かを判定する。
なお、本実施形態において、GPS測位データ判定部153により判定されるGPS測位データの一致とは、完全一致に加えて、ほぼ一致している場合、即ち、測位位置が近い場合も含むものとする。
【0049】
状態識別部154は、GPS測位データ判定部153の判定結果に基づいて、測位位置の状態を識別する。
具体的には、状態識別部154は、GPS測位データ判定部153によりGPS測位データが一致していると判定された場合には、「道以外」の状態であると識別する。即ち、識別の判断をした位置は、道以外に属しているものとして扱われる。なお、道以外の状態とは、例えば建築物内部のことである。
一方、状態識別部154は、GPS測位データ判定部153によりGPS測位データが一致していないと判定された場合には、「道」の状態であると識別する。即ち、識別の判断をした位置は、道に属しているものとして扱われる。
【0050】
自律航法測位データ補正部155は、前後のGPS測位データで自律航法測位データを補正する。即ち、自律航法測位データ補正部155は、自律航法測位データの前後のGPS測位データにより、自律航法測位データの位置を特定する補正を行う。
【0051】
自律航法測位精度推測部156は、前後のGPS測位データで自律航法測位データから、自律航法測位精度を推測する。即ち、自律航法測位精度推測部156は、自律航法による計測により連続して計測されている期間と、その前後でGPS測位精度算出部133により算出されたGPS測位精度データとに基づいて、自律航法測位精度データを推測する。
自律航法測位精度推測部15が実行する測位精度推測処理の詳細については、後述する。
【0052】
重み付け部157は、GPS測位データに対応するGPS測位精度及び自律航法測位データに対応する自律航法測位精度に基づいて、各測位データの重み付けを設定する。
【0053】
図9は、地図生成システムの機能的構成のうち、測位精度推測処理を実行するための機能的構成を示す機能ブロック図である。
サーバ12が測位精度推測処理を実行する場合には、図9に示すように、CPU61においては、自律航法測位精度推測部156と、記憶制御部114とが機能する。
詳細には、自律航法測位精度推測部156においては、GPS測位精度取得部171と、GPS測位時間取得部172と、推測部173と、が機能する。
【0054】
GPS測位精度取得部171は、記憶部68からGPS測位精度を取得する。
GPS測位時間取得部172は、記憶部68からGPS測位時間を取得する。
推測部173は、GPS測位精度取得部171により取得されたGPS測位精度及びGPS測位時間取得部172により取得されたGPS測位時間から、自律航法測位精度を推測する。
【0055】
図10は、自律航法測位精度の推測の一例を示す模式図である。
図10の例では、屋外の道路からトンネルを通過して、屋内となる地下街の通路を通り、再び屋外の道路へと移動する。
【0056】
この場合、トンネル及び地下街を除く部分は、GPSによる測位が行われる(図中、GPS測位)。一方のトンネル及び地下街の部分は、自律航法による測位が行われる(図中、自律航法測位)。
自律航法による測位が行われた部分においては、測位の始点と終点の直近の測位精度に準じて自律航法による測位精度が決定される。また、自律航法による測位精度は、測位の始点と終点から離れれば離れるほど測位精度は低くなる。
【0057】
本例のトンネルに対応する自律航法の測位精度は、測位の始点(時刻t6)の前の直近のGPS測位精度(時刻t5)に準じて、測位精度が推測され、測位の終点(時刻t8)の後の直近のGPS測位精度(時刻t9)に準じて、測位精度が推測される。また、測位の始点(時刻t6)と、測位の終点(時刻t8)の間に位置する時刻7の測位精度は、測位の始点(時刻t6)と、測位の終点(時刻t8)に準じて決定される。
【0058】
また、本例の地下街に対応する自律航法の測位精度は、測位の始点(時刻t14)の前の直近のGPS測位精度(時刻t13)に準じて、測位精度が推測され、測位の終点(時刻23)の後の直近のGPS測位精度(時刻t24)に準じて、測位精度が推測される。
【0059】
また、測位の始点(時刻14)及び測位の終点(時刻t23)から最も離れる時刻t18及び時刻t19は、それぞれ、測位の始点(時刻14)及び測位の終点(時刻t23)の測位精度の変化に準じて決定される。即ち、GPS測位精度(時刻t13)から測位の始点(時刻t14)への低下具合に応じて、測位の始点(時刻t14)から離れるに従って測位精度が低下する。また、GPS測位精度(時刻t24)から測位の終点(時刻t23)への低下具合に応じて、測位の始点(時刻t23)から離れるに従って測位精度が低下する。それぞれ精度の低下の基準となる測位位置が異なるために、時刻t19が時刻t18よりも少し精度が高いこととなる。
【0060】
図11は、地図生成システムの機能的構成のうち、地図データ生成処理を実行するための機能的構成を示す機能ブロック図である。
サーバ12が地図生成処理を実行する場合には、CPU61においては、地図データ生成処理部113と、記憶制御部114が機能する。
【0061】
詳細には、地図データ生成処理部113においては、測位データ配置部191と、道中心線決定部192と、道幅設定部193と、が機能する。
【0062】
測位データ配置部191は、道路であると識別された軌跡データを地図の座標位置に対応して配置する。
道中心線決定部192は、地図において、軌跡配置部により配置された軌跡データを繋ぎ合わせて道路の中心線を決定する。
道幅設定部193は、道中心線決定部192により決定された道路の中心線に基づいて、道路の道幅を設定する。
【0063】
次に、図12乃至図16を参照して、このような図6の機能的構成を有する図2の端末11及び図3のサーバ12が実行する地図生成処理について説明する。
図12は、図2の端末11及び図3のサーバ12が実行する地図生成処理の流れを説明するフローチャートである。
地図生成処理が実行されると、端末11のCPU21、GPS部26、センサ部27、記憶部30及び通信部31において図6の各機能ブロックが機能すると共に、サーバ12のCPU61、記憶部68及び通信部69において図6の各機能ブロックが機能して、次のような処理が実行される。即ち、以下の各ステップの処理の動作主体は、ハードウェアでは端末11のCPU21、GPS部26、センサ部27、記憶部30及び通信部31、並びにサーバ12のCPU61、記憶部68及び通信部69が該当する。ただし、本発明の理解を容易なものとすべく、端末11のCPU21、GPS部26、センサ部27、記憶部30及び通信部31、並びにサーバ12のCPU61、記憶部68及び通信部69において機能する各機能ブロックが動作主体であるものとして、以下の各ステップの処理の説明をする。
地図生成処理は、端末11の入力部28に対して、地図生成処理の開始を指示する入力操作がなされたことを契機に開始する。
【0064】
ステップS1において、端末11の主制御部91及び軌跡取得処理部92は、軌跡取得処理を実行する。これにより、端末11は、自機の移動の軌跡を取得する。なお、軌跡取得処理の詳細については、図13を参照して後述する。
【0065】
ステップS2において、サーバ12の主制御部111及び状態識別処理部112は、状態識別処理を実行する。これにより、サーバ12は、軌跡取得処理において取得された軌跡に対応する場所の状態を識別する。なお、状態識別処理の詳細については、図14及び図15を参照して後述する。
【0066】
ステップS3において、サーバ12の地図データ生成処理部113は、地図データ生成処理を実行する。これにより、サーバ12は、状態識別処理において識別された場所の状態を既存の地図データに反映して新たに地図データを生成する。なお、地図データ生成処理の詳細については、図16を参照して後述する。地図データ生成処理されると、地図生成処理は終了する。
【0067】
次に、このような地図生成処理のうち、ステップS1の軌跡取得処理、ステップS2の状態識別処理、及びステップS3の地図データ生成処理の各々の処理の詳細について、その順番で個別に説明する。
【0068】
図13は、図12の地図生成処理のステップS1の軌跡取得処理の詳細な流れを説明するフローチャートである。
【0069】
ステップS21において、GPS測位データ取得部131は、GPS測位を行う。即ち、GPS測位データ取得部131は、GPS部26からGPS測位データを取得する。
【0070】
ステップS22において、GPS測位状況判定部132は、GPSが測位可能か否かを判定する。即ち、GPS測位状況判定部132は、GPS用衛星Stからの電波をGSP部27が受信して、GPS測位データ取得部131によりGPS測位データが取得されているか否かを判定する。
GPSが測位可能であると判定された場合には、ステップS22においてYESであると判定され、処理はステップS23に進む。
【0071】
ステップS23において、GPS測位精度算出部133は、GSP測位精度を算出する。即ち、GPS測位精度算出部133は、GPS測位データ取得部131により取得されたGPS測位データからGPS測位精度を算出する。
【0072】
ステップS24において、GPS測位精度判定部134は、GPS測位精度が高いか否かを判定する。即ち、GPS測位精度判定部134は、GPS測位精度算出部133により算出されたGPS測位精度が所定の精度よりも高いか否かを判定する。
GPS測位精度が高いと判定された場合には、ステップS24においてYESであると判定され、処理はステップS25に進む。
【0073】
ステップS25において、記憶制御部93は、GPS測位データと、GPS測位精度データとを記憶させるように記憶部30を制御する。その後処理は、ステップS28に進む。
【0074】
これに対して、GPS測位が可能でないと判定された場合には、ステップS22においてNOであると判定され、処理はステップS26に進む。これと同様に、GPS測位精度が低いと判定された場合にも、ステップS24においてNOであると判定され、処理はステップS26に進む。
【0075】
ステップS26において、自律航法測位データ取得部135は、自律航法の測位(未補正)を行う。即ち、自律航法測位データ取得部135は、センサ部27から自律航法測位データを取得する。この際、自律航法測位データ取得部135は、センサ部27からの自律航法測位データにあたり、GPS部26でのGPS測位データの取得からセンサ部27での自律航法測位データの取得に切り替える制御を行う。即ち、自律航法測位データ取得部135は、GPS部26の動作を停止させ、センサ部27での動作を開始させるように切り替える制御を行う。
【0076】
ステップS27において、記憶制御部93は、自律航法測位データ(未補正)を記憶させるように記憶部30を制御する。
【0077】
ステップS28において、主制御部91は、測位を終了する。即ち、主制御部91は、GPS測位データの取得又は自律航法測位データの取得を終了する制御を行う。この際、通信制御部94は、記憶部30に記憶される各種の測位データ(GPS測位データ、GPS測位精度データ及び自律航法測位データ)を、サーバ12に送信するように通信部31を制御する。
これにより、図12の地図生成処理のステップS1の軌跡取得処理が終了し、処理はステップS2に進む。
【0078】
図14は、図12の地図生成処理のステップS2の状態識別処理の詳細な流れを説明するフローチャートである。
【0079】
ステップS52において、主制御部111は、未補正の自律航法測位データがあるか否かを判断する。即ち、主制御部111は、データ取得部151により取得されたデータのうち、自律航法測位データ(未補正)があるか否かを判断する。
未補正の自律航法測位データがある場合には、ステップS53においてYESであると判定され、処理はステップS53に進む。
【0080】
ステップS53において、データ抽出部152は、自律航法測位データの前後のGPS測位データを抽出する。即ち、データ抽出部152は、データ取得部151により取得されたデータのうち、取得された一連の自律航法測位データの始点及び終点の直近のGPS測位データを抽出する。
【0081】
ステップS53において、GPS測位データ判定部153は、前後のGPS測位データが一致しているか否かを判定する。即ち、GPS測位データ判定部153は、データ抽出部152により抽出された自律航法測位データの前後のGPS測位データの測位位置が一致しているか否かを判定する。
前後のGPS測位データが一致している場合には、ステップS54においてYESであると判定され、処理はステップS55に進む。
【0082】
ステップS55において、状態識別部154は、道以外の状態と識別する。即ち、状態識別部154は、GPS測位データ判定部153により、前後のGPS測位データが一致していると判定されたために、図4(b)の例の場合のように、道以外(建築物内部)の状態であると識別する。
【0083】
ステップS56において、主制御部111は、自律航法測位データを破棄する。即ち、主制御部111は、状態識別部154により自律航法測位データに対応する場所が道以外の建築物内部の状態として識別されたために、図4(c)の例のように、建築物内部の情報は必要なくなるために、自律航法測位データを破棄する。
【0084】
これに対して、前後のGPS測位データが一致していないと判定された場合には、ステップS54においてNOであると判定され、処理はステップS57に進む。
【0085】
ステップS57において、状態識別部154は、道の状態と識別する。即ち、状態識別部154は、GPS測位データ判定部153により、前後のGPS測位データが一致していないと判定されたために、図5(b)の例の場合のように、道の状態であると識別する。
【0086】
ステップS58において、自律航法測位データ補正部155は、前後のGPS測位データで自律航法測位データを補正する。即ち、自律航法測位データ補正部155は、自律航法測位データの前後のGPS測位データに準じて、自律航法の測位位置を補正する。詳細には、自律航法測位データ補正部155は、GPS測位データの測位位置に合わせて、自律航法の測位位置を決定する補正を行う。
【0087】
ステップS59において、自律航法測位精度推測部156は、測位精度推測処理を実行する。詳細には、自律航法測位精度推測部156は、自律航法測位データの測位精度を推測する。その後、推測された自律航法測位データの測位精度は、記憶制御部114により記憶部68に記憶される。なお、測位精度推測処理の詳細については、後述する。
測位精度推測処理が実行されることにより、処理はステップS60に進む。
これに対して、未補正の自律航法測位データがないと判定された場合には、ステップS52においてNOであると判定され、処理はステップS60に進む。
【0088】
ステップS60において、重み付け部157は、測位データの重み付けを測位精度から設定する。詳細には、重み付け部157は、データの信頼性の認識のために、GPS測位精度及び自律航法測位精度の高低の具合によって、GPS測位データ及び自律航法測位データに重み付けを行う。
これにより、図12の地図生成処理のステップS2の状態識別処理が終了し、処理はステップS3に進む。
【0089】
図15は、図14の地図生成処理のステップS59の測位精度推測処理の詳細な流れを説明するフローチャートである。
【0090】
ステップS81において、GPS測位精度取得部171は、補正に使用した始点のGPS測位精度を取得する。即ち、GPS測位精度取得部171は、図14のステップS58の補正で使用した自律航法測位データの始点の前のGPS測位データに対応するGPS測位精度を取得する。
【0091】
ステップS83において、GPS測位時間取得部172は、始点から終点までのGPS測位した時間を取得する。即ち、GPS測位時間取得部172は、自律航法測位データの始点から終点までの時間を、GPS測位データの取得時間から取得する。詳細には、GPS測位時間取得部172は、自律航法測位データの始点と終点の直近のGPS測位データの測位時間の差分から、自律航法測位データの始点から終点までのGPSの測位した時間を取得する。
【0092】
ステップS84において、推測部173は、始点・終点のGPS測位精度及び時間間隔から各自律航法測位データの測位精度を推測する。即ち、図10の例で示すように、推測部173は、自律航法測位データの始点及び終点の直近のGPS測位データの測位精度に準じて、自律航法測位データの始点及び終点の測位精度を推測する。次いで、時間間隔から他の自律航法測位データの測位精度を推測する。
これにより、測位精度推測処理は、終了して、図14における処理はステップS60に進む。
【0093】
図16は、図12の地図生成処理のステップS3の地図データ生成処理の詳細な流れを説明するフローチャートである。
【0094】
ステップS101において、測位データ配置部191は、重み付けをした各測位データを配置する。即ち、測位データ配置部191は、図5(b)の例のように、既存の地図上にGPS測位データ及び自律航法測位データを配置する。
【0095】
ステップS102において、道中心線決定部192は、配置された各測位データから道の中心線を決定する。
ステップS103において、道幅設定部193は、道中心線に基づいて、道幅を設定する。
ステップS104において、記憶制御部114は、道が追加された地図データを記憶部68に記憶する。
これにより、地図データ生成処理は終了し、地図生成処理の一連の処理は終了する。
【0096】
次に、本発明の第2の実施形態について説明する。
図17は、本発明の第2の実施形態に係る地図生成システムの機能的構成のうち、地図生成処理を実行するための機能的構成を示す機能ブロック図である。なお、第1実施形態と同一の符号を用いて説明し、第1実施形態で説明した構成については、その説明を省略する。
【0097】
上述した実施形態(第1の実施形態)では、状態識別処理をサーバ12で実行するように構成した。
これに対して、第2の実施形態の地図生成システムでは、状態識別処理を端末11で実行するように構成する。このため、第2の実施形態の地図生成システムでは、図17に示すように状態識別処理を行うための機能的構成である状態識別部95が端末11で機能するように構成する。
【0098】
図18は、第2の実施形態に係る状態識別処理の詳細な流れを説明するフローチャートである。
上述したように、第2の実施形態の地図生成システムでは、状態識別処理を端末11で実行するように構成する。このため、端末11では、測位データの取得に並行して、状態識別処理を行うために、測位データのやり取りの処理(図14のステップS51に相当する処理)や、測位データの抽出の処理(図14のステップS53に相当する処理)が不要になる。
なお、本実施形態においては、測位データの重み付けを測位精度データから設定する処理(図14のステップS58に相当する処理)については、サーバ12で実行させるように構成する。
【0099】
以上のように構成される地図生成システムにおいては、ネットワークNを介して相互に接続される端末11及びサーバ12を備える。
端末11又はサーバ12は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された複数の測位位置のデータを取得する。
また、端末11又はサーバ12は、端末11により取得された複数の測位位置のデータに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末11の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を判別する。
【0100】
従って、地図生成システムにおいては、端末11又はサーバ12は、端末11により取得された複数の測位位置のデータに基づいて、第1の測位位置と第2の測位位置との間の距離により、第1の測位位置と第2の測位位置との間の場所の状態を判別する。これにより、地図生成システムにおいては、取得した軌跡から軌跡が位置する場所の状態を識別することができる。
【0101】
また、地図生成システムは、軌跡取得処理部92と、状態識別処理部112とを備える。
軌跡取得処理部92は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された複数の測位位置のデータを取得する。
状態識別処理部112は、軌跡取得処理部92により取得された複数の測位位置のデータに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末11の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を判別する。
【0102】
従って、地図生成システムにおいては、状態識別処理部112は、軌跡取得処理部92により取得された複数の測位位置のデータに基づいて、第1の測位位置と第2の測位位置との間の距離により、第1の測位位置と第2の測位位置との間の場所の状態を判別する。これにより、地図生成システムにおいては、取得した軌跡から軌跡が位置する場所の状態を識別することができる。
【0103】
また、状態識別処理部112は、求めた距離が閾値以上である場合には、場所の状態は、道が存在する状態であると識別し、求めた距離が閾値未満である場合には、場所の状態は、建築物が存在する状態であると識別する。
従って、地図生成システムにおいては、軌跡が属する場所の状態を道又は建築物のいずれかの状態として判別することができる。
【0104】
端末11は、現在位置が測位される位置測位に加えてさらに、移動方向及び移動量が計測される自律航法による計測が行われ、GPSによる位置測位の測位状態に基づいて、GPSによる位置測位と自律航法による計測とが切り替えられる。
状態識別処理部112は、GPSによる位置測位と自律航法による計測との切り替えに基づいて、端末11の現在位置の測位の可能または不能を判断する。
従って、地図生成システムにおいては、例えばGPSの電波が受信できない等のGPSによる位置測位ができない場合には、自律航法による計測に切り替えられることをもって、端末11の現在位置の測位の可能または不能を判断することができる。
【0105】
また、地図生成システムにおいては、自律航法による計測により計測された移動方向及び移動量が、基準点となるGPSの測位位置に積算されて、端末11の現在位置を示す自律航法測位データが生成される。
また、地図生成システムにおいては、GPS測位精度算出部133と、自律航法測位精度推測部156とを備える。
GPS測位精度算出部133は、GPS測位データの精度を算出する。
自律航法測位精度推測部156は、自律航法測位データの精度を算出する。
記憶制御部114は、GPS測位データと精度とを対応付けて記憶媒体に記憶させると共に、自律航法測位データと精度とを対応付けて記憶部68に記憶させる。
従って、地図生成システムにおいては、各位置のデータと精度のデータとを対応付けて記憶することができる。
【0106】
また、地図生成システムにおいては、記憶制御部114により記憶が制御されたGPS測位データと自律航法測位データとを、各々の精度に対応した重み付けを行う重み付け部157をさらに備える。
従って、GPS測位データと自律航法測位データとが重み付けされることにより、重み付けによりGPS測位データと自律航法測位データの信頼性を確認することができる。また、信頼性が低いGPS測位データと自律航法測位データが該当する場所においては、さらにデータを取得することにより、信頼性を高めることができる。
【0107】
自律航法測位精度推測部156は、自律航法による計測により連続して計測されている期間と、その前後でGPS測位精度算出部133により算出されたGPS測位精度データとに基づいて、自律航法測位精度データを推測する。
従って、地図生成システムにおいては、取得したGPS測位データから、自律航法測位精度データを取得することができる。
【0108】
また、地図生成システムにおいては、状態識別処理部112により識別された場所の状態を反映させた地図を示す地図データを生成する地図データ生成処理部113をさらに備える。
【0109】
なお、本発明は、上述の実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良等は本発明に含まれるものである。
【0110】
また、上述の実施形態では、道状態でないと判定された場合、センサ部27のデータは無視して、削除等を行っていたが、これに限られない。例えば、センサ部27のデータに基づいて、道でない領域、即ち、建築物内部の形状を特定してもよい。
【0111】
また、上述の実施形態では、軌跡取得処理、状態識別処理及び地図データ生成処理の各処理を、第1の実施形態では軌跡の取得を端末11で実行すると共に、状態の識別及び地図データの生成をサーバ12で実行し、第2の実施形態では軌跡の取得及び状態の識別を端末11で実行すると共に、状態の識別及び地図データの生成をサーバ12で実行するように構成したがこれに限られない。各処理は、端末11又はサーバ12のいずれかで実行するように構成してもよい。
【0112】
上述した一連の処理は、ハードウェアにより実行させることもできるし、ソフトウェアにより実行させることもできる。
換言すると、図2及び図3の機能的構成は例示に過ぎず、特に限定されない。即ち、上述した一連の処理を全体として実行できる機能が端末11及びサーバ12に備えられていれば足り、この機能を実現するためにどのような機能ブロックを用いるのかは特に図2及び図3の例に限定されない。
また、1つの機能ブロックは、ハードウェア単体で構成してもよいし、ソフトウェア単体で構成してもよいし、それらの組み合わせで構成してもよい。
【0113】
一連の処理をソフトウェアにより実行させる場合には、そのソフトウェアを構成するプログラムが、コンピュータ等にネットワークや記録媒体からインストールされる。
コンピュータは、専用のハードウェアに組み込まれているコンピュータであってもよい。また、コンピュータは、各種のプログラムをインストールすることで、各種の機能を実行することが可能なコンピュータ、例えば汎用のパーソナルコンピュータであってもよい。
【0114】
このようなプログラムを含む記録媒体は、ユーザにプログラムを提供するために装置本体とは別に配布される図2及び図3のリムーバブルメディア41、81により構成されるだけでなく、装置本体に予め組み込まれた状態でユーザに提供される記録媒体等で構成される。リムーバブルメディア41、81は、例えば、磁気ディスク(フロッピディスクを含む)、光ディスク、又は光磁気ディスク等により構成される。光ディスクは、例えば、CD−ROM(Compact Disk−Read Only Memory),DVD(Digital Versatile Disk)等により構成される。光磁気ディスクは、MD(Mini−Disk)等により構成される。また、装置本体に予め組み込まれた状態でユーザに提供される記録媒体は、例えば、プログラムが記録されている図2及び図3のROM22、62や、図2及び図3の記憶部30、68に含まれるハードディスク等で構成される。
【0115】
なお、本明細書において、記録媒体に記録されるプログラムを記述するステップは、その順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的或いは個別に実行される処理をも含むものである。
また、本明細書において、システムの用語は、複数の装置や複数の手段などより構成される全体的な装置を意味するものとする。
【0116】
以上、本発明のいくつかの実施形態について説明したが、これらの実施形態は、例示に過ぎず、本発明の技術的範囲を限定するものではない。本発明はその他の様々な実施形態を取ることが可能であり、さらに、本発明の要旨を逸脱しない範囲で、省略や置換等種々の変更を行うことができる。これら実施形態やその変形は、本明細書等に記載された発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【0117】
以下に、本願の出願当初の特許請求の範囲に記載された発明を付記する。
[付記1]
時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータを取得する取得手段と、
前記取得手段により取得された前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する状態判別手段と、
を備えることを特徴とする測位場所識別装置。
[付記2]
前記状態判別手段は、
求めた前記距離が閾値以上である場合には、前記場所の状態は、道が存在する状態であると識別し、
求めた前記距離が閾値未満である場合には、前記場所の状態は、建築物が存在する状態であると識別する、
ことを特徴とする付記1に記載の測位場所識別装置。
[付記3]
前記端末においては、
前記現在位置が測位される位置測位に加えてさらに、移動方向及び移動量が計測される移動計測が行われ、
前記位置測位の測位状態に基づいて、前記位置測位と前記移動計測とが切り替えられ、
前記状態判別手段は、前記位置測位と前記移動計測との切り替えに基づいて、前記端末の現在位置の測位の可能または不能を判断する、
付記1又は2に記載の測位場所識別装置。
[付記4]
前記移動計測により計測された前記移動方向及び前記移動量が、基準点となる前記測位位置に積算されて、前記端末の現在位置を示す算出位置のデータが生成され、
前記測位場所識別装置は、
前記測位位置のデータの精度を取得する位置精度取得手段と、
前記算出位置のデータの精度を算出する位置精度算出手段と、
前記測位位置のデータと前記精度とを対応付けて記憶媒体に記憶させると共に、前記算出位置のデータと前記精度とを対応付けて前記記憶媒体に記憶させる記憶制御手段と、
をさらに備えることを特徴とする付記3に記載の測位場所識別装置。
[付記5]
前記記憶制御手段により記憶が制御された前記測位位置のデータと前記算出位置のデータとを、各々の精度に対応した重み付けを行って統合する統合手段と、
をさらに備えることを特徴とする付記4に記載の測位場所識別装置。
[付記6]
前記位置精度算出手段は、前記移動計測により連続して計測されている期間と、その前後で前記位置精度取得手段により測位された前記測位位置のデータの精度とに基づいて、前記算出位置のデータの精度を算出する、
ことを特徴とする付記5に記載の測位場所識別装置。
[付記7]
前記状態判別手段により判別された前記場所の状態を反映させた地図を示す地図データを生成する地図生成手段
をさらに備えることを特徴とする付記1乃至6のいずれか1つに記載の測位場所識別装置。
[付記8]
当該測位場所識別装置は、前記端末により構成される、
ことを特徴とする付記1乃至7のいずれか1つに記載の測位場所識別装置。
[付記9]
当該測位場所識別装置は、前記端末とネットワークを介して相互に接続されるサーバにより構成される、
ことを特徴とする付記1乃至7のいずれか1つに記載の測位場所識別装置。
[付記10]
時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータに基づいて場所の状態を判別する測位場所識別装置が実行する測位場所識別方法であって、
前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する状態判別ステップを
含むことを特徴とする測位場所識別方法。
[付記11]
時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータを処理するコンピュータに、
前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する状態判別手段
として機能させることを特徴とするプログラム。
[付記12]
ネットワークを介して相互に接続される端末及びサーバを備える測位場所識別システムにおいて、
前記端末又は前記サーバが、時間方向に離間して、前記端末の現在位置としてそれぞれ測位された複数の測位位置のデータを取得し、
前記端末又は前記サーバが、前記端末により取得された前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を識別する、
ことを特徴とする測位場所識別システム。
【符号の説明】
【0118】
11・・・端末,12・・・サーバ,21・61・・・CPU,22・62・・・ROM,23・63・・・RAM,24・64・・・バス,25・65・・・入出力インターフェース,26・・・GPS部,27・・・センサ部,28・66・・・入力部,29・67・・・出力部,30・68・・・記憶部,31・69・・・通信部,32・70・・・ドライブ,33・・・バッテリ,41・81・・・リムーバブルメディア,91・・・主制御部,92・・・軌跡取得処理部,93・・・記憶制御部,94・・・通信制御部,111・・・主制御部,112・・・状態識別処理部,113・・・地図データ生成処理部,114・・・記憶制御部,115・・・通信制御部,131・・・GPS測位データ取得部,132・・・GPS測位状況判定部,133・・・GPS測位精度算出部,134・・・GPS測位精度判定部,135・・・自律航法測位データ取得部,151・・・データ取得部,152・・・データ抽出部,153・・・GPS測位データ判定部,154・・・状態識別部,155・・・自律航法測位データ補正部,156・・・自律航法測位精度推測部,157・・・重み付け部,171・・・GPS測位精度取得部,172・・・GPS測位時間取得部,173・・・推測部,191・・・測位データ配置部,192・・・道中心線決定部,193・・・道幅設定部
【特許請求の範囲】
【請求項1】
時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータを取得する取得手段と、
前記取得手段により取得された前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する状態判別手段と、
を備えることを特徴とする測位場所識別装置。
【請求項2】
前記状態判別手段は、
求めた前記距離が閾値以上である場合には、前記場所の状態は、道が存在する状態であると識別し、
求めた前記距離が閾値未満である場合には、前記場所の状態は、建築物が存在する状態であると識別する、
ことを特徴とする請求項1に記載の測位場所識別装置。
【請求項3】
前記端末においては、
前記現在位置が測位される位置測位に加えてさらに、移動方向及び移動量が計測される移動計測が行われ、
前記位置測位の測位状態に基づいて、前記位置測位と前記移動計測とが切り替えられ、
前記状態判別手段は、前記位置測位と前記移動計測との切り替えに基づいて、前記端末の現在位置の測位の可能または不能を判断する、
ことを特徴とする請求項1又は2に記載の測位場所識別装置。
【請求項4】
前記移動計測により計測された前記移動方向及び前記移動量が、基準点となる前記測位位置に積算されて、前記端末の現在位置を示す算出位置のデータが生成され、
前記測位場所識別装置は、
前記測位位置のデータの精度を取得する位置精度取得手段と、
前記算出位置のデータの精度を算出する位置精度算出手段と、
前記測位位置のデータと前記精度とを対応付けて記憶媒体に記憶させると共に、前記算出位置のデータと前記精度とを対応付けて前記記憶媒体に記憶させる記憶制御手段と、
をさらに備えることを特徴とする請求項3に記載の測位場所識別装置。
【請求項5】
前記記憶制御手段により記憶が制御された前記測位位置のデータと前記算出位置のデータとを、各々の精度に対応した重み付けを行って統合する統合手段と、
をさらに備えることを特徴とする請求項4に記載の測位場所識別装置。
【請求項6】
前記位置精度算出手段は、前記移動計測により連続して計測されている期間と、その前後で前記位置精度取得手段により測位された前記測位位置のデータの精度とに基づいて、前記算出位置のデータの精度を算出する、
ことを特徴とする請求項5に記載の測位場所識別装置。
【請求項7】
前記状態判別手段により判別された前記場所の状態を反映させた地図を示す地図データを生成する地図生成手段と、
をさらに備えることを特徴とする請求項1乃至6のいずれか1項に記載の測位場所識別装置。
【請求項8】
当該測位場所識別装置は、前記端末により構成される、
ことを特徴とする請求項1乃至7のいずれか1項に記載の測位場所識別装置。
【請求項9】
当該測位場所識別装置は、前記端末とネットワークを介して相互に接続されるサーバにより構成される、
ことを特徴とする請求項1乃至7のいずれか1項に記載の測位場所識別装置。
【請求項10】
時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータに基づいて場所の状態を判別する測位場所識別装置が実行する測位場所識別方法であって、
前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する状態判別ステップを、
含むことを特徴とする測位場所識別方法。
【請求項11】
時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータを処理するコンピュータに、
前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する状態判別手段、
として機能させることを特徴とするプログラム。
【請求項12】
ネットワークを介して相互に接続される端末及びサーバを備える測位場所識別システムにおいて、
前記端末又は前記サーバが、時間方向に離間して、前記端末の現在位置としてそれぞれ測位された複数の測位位置のデータを取得し、
前記端末又は前記サーバが、前記端末により取得された前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する、
ことを特徴とする測位場所識別システム。
【請求項1】
時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータを取得する取得手段と、
前記取得手段により取得された前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する状態判別手段と、
を備えることを特徴とする測位場所識別装置。
【請求項2】
前記状態判別手段は、
求めた前記距離が閾値以上である場合には、前記場所の状態は、道が存在する状態であると識別し、
求めた前記距離が閾値未満である場合には、前記場所の状態は、建築物が存在する状態であると識別する、
ことを特徴とする請求項1に記載の測位場所識別装置。
【請求項3】
前記端末においては、
前記現在位置が測位される位置測位に加えてさらに、移動方向及び移動量が計測される移動計測が行われ、
前記位置測位の測位状態に基づいて、前記位置測位と前記移動計測とが切り替えられ、
前記状態判別手段は、前記位置測位と前記移動計測との切り替えに基づいて、前記端末の現在位置の測位の可能または不能を判断する、
ことを特徴とする請求項1又は2に記載の測位場所識別装置。
【請求項4】
前記移動計測により計測された前記移動方向及び前記移動量が、基準点となる前記測位位置に積算されて、前記端末の現在位置を示す算出位置のデータが生成され、
前記測位場所識別装置は、
前記測位位置のデータの精度を取得する位置精度取得手段と、
前記算出位置のデータの精度を算出する位置精度算出手段と、
前記測位位置のデータと前記精度とを対応付けて記憶媒体に記憶させると共に、前記算出位置のデータと前記精度とを対応付けて前記記憶媒体に記憶させる記憶制御手段と、
をさらに備えることを特徴とする請求項3に記載の測位場所識別装置。
【請求項5】
前記記憶制御手段により記憶が制御された前記測位位置のデータと前記算出位置のデータとを、各々の精度に対応した重み付けを行って統合する統合手段と、
をさらに備えることを特徴とする請求項4に記載の測位場所識別装置。
【請求項6】
前記位置精度算出手段は、前記移動計測により連続して計測されている期間と、その前後で前記位置精度取得手段により測位された前記測位位置のデータの精度とに基づいて、前記算出位置のデータの精度を算出する、
ことを特徴とする請求項5に記載の測位場所識別装置。
【請求項7】
前記状態判別手段により判別された前記場所の状態を反映させた地図を示す地図データを生成する地図生成手段と、
をさらに備えることを特徴とする請求項1乃至6のいずれか1項に記載の測位場所識別装置。
【請求項8】
当該測位場所識別装置は、前記端末により構成される、
ことを特徴とする請求項1乃至7のいずれか1項に記載の測位場所識別装置。
【請求項9】
当該測位場所識別装置は、前記端末とネットワークを介して相互に接続されるサーバにより構成される、
ことを特徴とする請求項1乃至7のいずれか1項に記載の測位場所識別装置。
【請求項10】
時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータに基づいて場所の状態を判別する測位場所識別装置が実行する測位場所識別方法であって、
前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する状態判別ステップを、
含むことを特徴とする測位場所識別方法。
【請求項11】
時間方向に離間して、端末の現在位置としてそれぞれ測位された複数の測位位置のデータを処理するコンピュータに、
前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する状態判別手段、
として機能させることを特徴とするプログラム。
【請求項12】
ネットワークを介して相互に接続される端末及びサーバを備える測位場所識別システムにおいて、
前記端末又は前記サーバが、時間方向に離間して、前記端末の現在位置としてそれぞれ測位された複数の測位位置のデータを取得し、
前記端末又は前記サーバが、前記端末により取得された前記複数の測位位置のデータに基づいて、前記端末の現在位置の測位が不能になる前の第1の測位位置と、前記端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、前記第1の測位位置と前記第2の測位位置との間の場所の状態を判別する、
ことを特徴とする測位場所識別システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−76671(P2013−76671A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−217800(P2011−217800)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
[ Back to top ]