
測位支援装置
【課題】本発明は、測位支援装置に関し、測位の精度を高めることを目的とする。
【解決手段】衛星航法に基づく測位に供される複数pの航行衛星毎に、前記測位に供される座標系の要素ai
(1≦i≦n)と、前記測位の過程で既知である物理量q1〜qα(α≧1)とのそれぞれの基準値に対する偏差Δa1〜Δan,Δq1〜Δqαと、前記複数の航行衛星の距離と既知の物理量の換算により得られた距離との何れか一方であるρj
(1≦j≦(p+α),(p>n))の残差Δρj
の標準値と、前記標準値に含まれる誤差εj (1≦j≦(p+α),(p>n))との差を与える係数列hj1〜hjn,hj(n+1)〜hj(n+α)とに対して、Δρj=(hj1・Δa1+…+hjn・Δan+hj(n+1)・Δq1+…+hj(n+α)・Δqα)+εjが成立する連立方程式の解として、前記偏差Δa1〜Δan,Δq1〜Δqαの全てまたは一部を求める。
【解決手段】衛星航法に基づく測位に供される複数pの航行衛星毎に、前記測位に供される座標系の要素ai
(1≦i≦n)と、前記測位の過程で既知である物理量q1〜qα(α≧1)とのそれぞれの基準値に対する偏差Δa1〜Δan,Δq1〜Δqαと、前記複数の航行衛星の距離と既知の物理量の換算により得られた距離との何れか一方であるρj
(1≦j≦(p+α),(p>n))の残差Δρj
の標準値と、前記標準値に含まれる誤差εj (1≦j≦(p+α),(p>n))との差を与える係数列hj1〜hjn,hj(n+1)〜hj(n+α)とに対して、Δρj=(hj1・Δa1+…+hjn・Δan+hj(n+1)・Δq1+…+hj(n+α)・Δqα)+εjが成立する連立方程式の解として、前記偏差Δa1〜Δan,Δq1〜Δqαの全てまたは一部を求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衛星航法に基づいて行われる測位の精度を高める測位支援装置に関する。
【背景技術】
【0002】
GPS受信機に内蔵され、あるいは別体に備えられた測位演算装置は、GPS衛星から到来した受信波に所定の演算を施すことにより測位を実現する。
このような測位演算装置では、GPS受信機が位置する地点の高度等の既知の情報が拘束条件として適用されることにより、測位の精度の向上が図られる場合がある。
【0003】
なお、本発明に関連性がある先行技術としては、以下に列記する発明があった。
(1) 「車両から収集記録した情報から車両の挙動を再現する車両挙動再現方法において、少なくとも2時点以上について車両の通過した時間,位置,姿勢の情報を指示した概略動作情報を定義するステップと、車両から収集記録した規定時間間隔毎の車両挙動情報を参照し、前記該概略動作情報を拘束条件として、当該拘束条件との差分が最小になるように、前記車両挙動情報を補正して、前記概略動作情報を設定した時点以外の時点における車両の位置及び姿勢を演算する挙動推定を行うステップとを有する」ことにより、「高精度のセンサの利用や、詳細な動作設定を行うことなく、車両から取得した車両情報から、詳細な車両の挙動を推定する」点に特徴がある車両挙動再現方法…特許文献1
【0004】
(2) 「GPS衛星からの電波をアンテナを介して受信する第1の受信機と、GPS衛星からの電波をアンテナを介して受信する第2の受信機と、GPS衛星からの電波をアンテナを介して受信する第3の受信機と、第1の受信機からのデータを取得する第1のデータ処理装置と、第2の受信機及び第3の受信機からのデータと、前記第1のデータ処理装置からのデータを取得する第2のデータ処理装置とを備え、GPS衛星からの電波を受信して位置を算出する絶対位置算出方法において、先ず、第1の受信機、第2の受信、及び第3の受信機を用いて、それぞれの計測地点で、GPS衛星からのデータを取得し、次に、第2の受信機と第3の受信機の計測地点間の距離を拘束条件としフィルタリング処理を行い、絶対位置の算出を行う」ことにより、「絶対位置の算出および位置計測の精度を従来例より高める」点に特徴がある絶対位置算出方法…特許文献2
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−204304号公報
【特許文献2】特開2008−083000号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上述した従来の測位演算装置では、拘束条件が必ずしも成立しないにもかかわらず厳密に適用されるために、その拘束条件に含まれ得る誤差等により生じる測位結果の誤差が許容できない程度に大きくなる場合があった。
【0007】
すなわち、従来例では、測位の精度は、拘束条件が必ずしも適切に適用されないために、十分に確保できない可能性があった。
【0008】
本発明は、ハードウェアおよびソフトウェアの構成の複雑化と処理量の大幅な増加との何れも伴うことなく、柔軟に測位の精度を高め、かつ安定に維持できる測位支援装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
請求項1に記載の発明では、衛星航法に基づく測位に供される複数pの航行衛星毎に、
前記測位に供される座標系の要素ai
(1≦i≦n)と、前記測位の過程で既知である物理量q1〜qα(α≧1)とのそれぞれの基準値に対する偏差Δa1〜Δan,Δq1〜Δqαと、
前記複数の航行衛星の距離と既知の物理量の換算により得られた距離との何れか一方であるρj
(1≦j≦(p+α),(p>n))の残差Δρj
の標準値と、前記標準値に含まれる誤差εj (1≦j≦(p+α),(p>n))との差を与える係数列hj1〜hjn,hj(n+1)〜hj(n+α)とに対して、Δρj=(hj1・Δa1+…+hjn・Δan+hj(n+1)・Δq1+…+hj(n+α)・Δqα)+εjが成立する連立方程式の解として、前記偏差Δa1〜Δan,Δq1〜Δqαの全てまたは一部を求める。
【0010】
すなわち、上記偏差Δa1〜Δan,Δq1〜Δqαは、何れも、既知の物理量q1〜qαに基づく拘束条件がその拘束条件に誤差が伴い得ることを前提として組み込まれた連立方程式の解として求められる。
【0011】
請求項2に記載の発明では、請求項1に記載の測位支援装置において、前記物理量q1〜qαの数が複数である。
【0012】
すなわち、偏差Δa1〜Δan,Δq1〜Δqαを与える連立方程式の解法に適用される拘束条件が増加するため、これらの偏差Δa1〜Δan,Δq1〜Δqαの精度が高められる。
【0013】
請求項3に記載の発明では、請求項1に記載の測位支援装置において、前記物理量q1〜qαは、前記衛星航法に基づいて前記測位の結果に含まれるべき高度である。
【0014】
すなわち、拘束条件は、測位によって求められ得る高度によって設定される。
【0015】
請求項4に記載の発明では、請求項1ないし請求項3の何れか1項に記載の測位支援装置において、前記基準値は、前記要素ai
(1≦i≦n)と前記物理量q1〜qαとの先行して求められた値である。
【0016】
すなわち、上記基準値を得る処理は、既述の先行して求められた要素ai
(1≦i≦n)と物理量q1〜qαとの記憶および参照を行う簡便な処理として実現される。
【0017】
請求項5に記載の発明では、請求項1ないし請求項4の何れか1項に記載の測位支援装置において、前記標準値は、前記残差Δρj
の先行して求められた値である。
【0018】
すなわち、上記基準値を得る処理は、既述の先行して求められた記残差Δρj
の記憶および参照を行う簡便な処理として実現される。
【発明の効果】
【0019】
本発明が適用された測位系では、上記拘束条件は、その拘束条件の誤差が小さいほど厳密に適用されるため、このような誤差が広範に増減し得る場合であっても精度が高められ、かつ安定に維持される。
また、本発明は、拘束条件を得るために、ハードウェアの構成の変更と、ソフトウェアの大幅な変更や追加とを伴うことなく実現される。
さらに、本発明によれば、処理量の削減に併せて、応答性の向上が図られる。
したがって、本発明が適用された測位系は、安価に信頼性および性能が高められ、かつ多様な環境および分野に対する柔軟な適応が可能となる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施形態を示す図である。
【図2】本実施形態における測位演算部の動作フローチャートである。
【図3】本実施形態によって達成される測位結果の精度を示す図である。
【発明を実施するための形態】
【0021】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
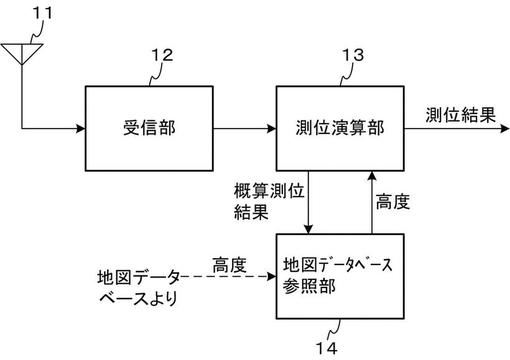
図1は、本発明の一実施形態を示す図である。
図において、アンテナ11の給電点は受信部12のアンテナ端子に接続され、その受信部12の復調出力は測位演算部13の第一の入力に接続される。測位演算部13の第一の出力には、後述する測位結果が出力される。測位演算部13の第二の出力は地図データベース参照部14の入力に接続され、その地図データベース参照部14の出力は測位演算部13の第二の入力に接続される。地図データベース参照部14は図示されない地図データベースに接続される。
【0022】
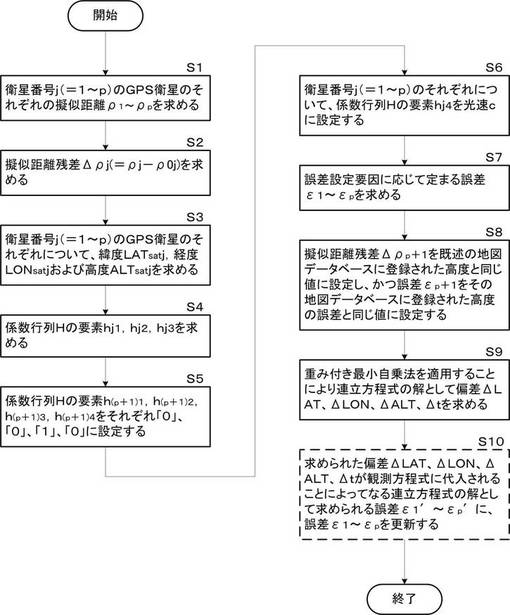
図2は、本実施形態における測位演算部の動作フローチャートである。
以下、図1および図2を参照して本実施形態における各部の一般的な動作を説明する。
受信部12は、各GPS衛星からアンテナ11に到来した受信波を復調する。測位演算部13は、このような復調によって得られたデータに衛星航法に基づく所定の処理を施すことによって、アンテナ11の位置を求める。以下では、このような処理を「測位演算」という。
【0023】
また、測位演算部13は、上記測位演算の下で所定の精度で求められた測位の結果(以下、「概算測位結果」という。) を地図データベース参照部14に与える。
地図データベース参照部14は、その概算測位結果に基づいて既述の地図データベースを参照することにより、アンテナ11が位置する地点の高度を取得し、その高度を測位演算部13に与える。
【0024】
以下、本実施形態の原理を説明する。
本実施形態では、測位演算に供されるGPS衛星の数pと、これらのGPS衛星の識別に供されるユニークな識別子(以下、「衛星番号」という。)j(1≦j≦p)と、その衛星番号jで示されるGPS衛星の擬似距離の残差(以下、「擬似距離残差」という。)Δρj と、上記GPS衛星(ここでは、衛星番号として(p+1)を付与する。)の擬似距離に対する既知の物理量qの換算により得られた擬似距離の残差Δρp+1 とは、下式(1) のような擬似距離残差ベクトルΔρとして表すことができる。
【数1】

【0025】
また、測位演算部13が測位演算の演算対象を得るために行う前置処理の対象と、その前置処理の過程を示す状態と、この前置処理の結果とは、何れも時間tの関数であって、それぞれx(t)、u(t)、y(t)と表すことができる。さらに、これらの時間関数x(t)、u(t)、y(t)の相互の関係は、一般に、以下の条件が成立する「線形動的システム」と見なすことができる。
【0026】
(1) x(t)の時間tに対する変化率(勾配)がx(t)とu(t)との線形結合(一次結合)として与えられる。
(2) y(t)がx(t)とu(t)との線形結合(一次結合)として与えられる。
【0027】
また、本実施形態では、上記線形動的システムは、以下の事項(1)〜(4)が成立する系と見なすことができる。
(1) 前置処理の対象x(t)については、下式(2) に示すように、アンテナ11の位置を示す緯度LAT、経度LON、高度ALTと、本実施形態に内蔵された時計(図示されない。)が与える時刻tとのそれぞれの偏差ΔLAT、ΔLON、ΔALT、Δtを要素とする位置ベクトルΔPと見なすことができる。ここに、本願の特許請求の範囲では、上記偏差ΔLAT、ΔLON、Δtが「座標系の要素ai(1≦i≦n)の偏差Δa1〜Δan」に相当し、かつ上記偏差ΔALTが「物理量q1〜qα(α≧1)の偏差Δq1〜Δqα」に相当する。
【数2】
【0028】
(2) 前置処理の過程を示す状態u(t)については、下式(3) に示すように、上記擬似距離残差ベクトルΔρの要素であるΔρ1〜Δρp,Δρp+1
の標準値にそれぞれ含まれる誤差を示す誤差ベクトルεと見なすことができる。
【数3】
【0029】
(3) 前置処理の結果y(t)については、既述の擬似距離残差ベクトルΔρと見なすことができる。
(4) したがって、このような擬似距離残差ベクトルΔρは、既述の位置ベクトルΔPおよび誤差ベクトルεに併せて、上記Δρ1〜Δρp,Δρp+1 の標準値と誤差ベクトルεの要素ε1〜εp,εp+1 との差を与える係数行列Hを含み、かつ既述の線形結合(一次結合)に相当する下式(4)(以下、「観測方程式」という。)で示される。
【数4】
【0030】
本発明の特徴は、本実施形態では、以下の演算手順(1)〜(9)に基づいて、アンテナ11の位置を示す緯度LAT、経度LON、高度ALTと、本発明に係る受信機に内蔵された時計(図示されない。)が与える時刻tとのそれぞれの偏差ΔLAT、ΔLON、ΔALT、Δtが測位演算部13によって求められ、かつ測位演算に適用される点にある。
【0031】
(1) 衛星番号j(=1〜p)のGPS衛星のそれぞれの擬似距離ρ1〜ρpを求める(図2ステップS1)。
【0032】
(2) 擬似距離ρ1〜ρpと、これらの擬似距離ρ1〜ρpについて先行して推定された擬似距離ρ01〜ρ0pとに対して下式(5) で示される算術演算により、既述の擬似距離残差Δρjを求める(図2ステップS2)。
Δρj=ρj−ρ0j (j=1〜p) ・・・(5)
【0033】
(3) 衛星番号j(=1〜p)のGPS衛星のそれぞれについて、取得されたエフェメリス(およびアルマナック)に基づいて、緯度LATsatj,経度LONsatjおよび高度ALTsatjを求める(図2ステップS3)。
【0034】
(4) これらの緯度LATsatj,経度LONsatj,高度ALTsatjと同様に先行して推定されたアンテナ11の位置の緯度LAT0,経度LON0,高度ALT0とに対して下式(6)〜(9)で示される算術演算により、既述の係数行列Hの要素hj1,hj2,hj3を求める(図2ステップS4)。
ρ0j={(LATsatj−LAT0)2+(LONsatj−LON0)2
+(ALTsatj−ALT0)2}0.5 …(6)
hj1=−(LATsatj−LAT0)/ρ0j (j=1〜p) …(7)
hj2=−(LONsatj−LON0)/ρ0j (j=1〜p) …(8)
hj3=−(ALTsatj−ALT0)/ρ0j (j=1〜p) …(9)
【0035】
なお、上式(7),(8),(9)は、下式(10)〜(12)に示すように、緯度LAT,経度LON,高度ALTのそれぞれに対する擬似距離ρj
の変化率に相当する。
hj1=∂ρj/∂LAT≒∂ρj0/∂LAT0 …(10)
hj2=∂ρj/∂LON≒∂ρj0/∂LON0 …(11)
hj3=∂ρj/∂ALT≒∂ρj0/∂ALT0 …(12)
【0036】
(5) 衛星番号j(=p+1)に対応する係数行列Hの要素h(p+1)1〜h(p+1)4を以下の通りに設定する(図2ステップS5)。
[h(p+1)1 h(p+1)2 h(p+1)3 h(p+1)4]=[0 0 1 0]
【0037】
(6) 衛星番号j(=1〜p)のそれぞれについて、上記係数行列Hの要素hj4を光速cに設定する(図2ステップS6)。
【0038】
(7) 衛星番号j(=1〜p)のGPS衛星のそれぞれに対して予め適切な値として求められ、これらのGPS衛星のアンテナ11に対する仰角等(以下、「誤差設定要因」という。)に応じて定まる誤差ε1〜εpを求める(図2ステップS7)。
【0039】
(8) 擬似距離残差Δρp+1 を既述の地図データベースに登録された高度と同じ値に設定し、かつ誤差εp+1
をその地図データベースに登録された高度の誤差と同じ値に設定する(図2ステップS8)。
【0040】
(9) 以上の一連の処理(図2ステップS1〜S8)によって求められた各値が既述の観測方程式(4) に代入されることによってなる連立方程式に重み付き最小自乗法を適用することにより、その連立方程式の解として偏差ΔLAT、ΔLON、ΔALT、Δtを求める(図2ステップS9)。なお、上記重み付き最小自乗法に適用される重みは、例えば、上記誤差ε1〜εp,εp+1
の分散σ12〜σp2,σp+12
が小さいほど大きな値に設定される。
【0041】
すなわち、地図データベースから取得される正確な高度が拘束条件として用いられ、その拘束条件に誤差が伴うことを前提として与えられる重みが上記最小自乗法に適用される。
【0042】
さらに、このような拘束条件の誤差と重みとの対応関係は、以下の通りに最適化される。
(1) 誤差が小さいときには、重みが大きく設定されることによって、上記拘束条件が厳密に適用される。
(2) 反対に誤差が大きいときには、重みが小さく設定されることによって、拘束条件が緩やかに適用され、あるいは全く適用されない。
【0043】
したがって、本実施形態では、既述の拘束条件は、誤差の大小にかかわらず共通の演算手順に基づいて測位演算の結果に反映され、その測位演算の精度の向上に確度高く安定に寄与する。
【0044】
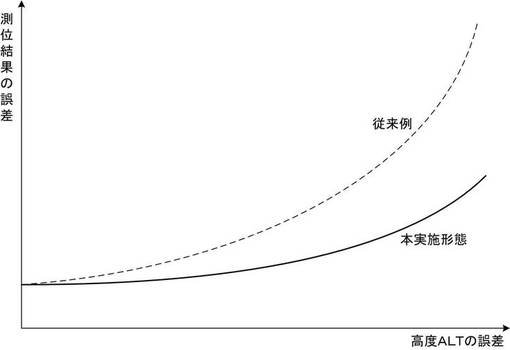
また、本実施形態では、本発明のシミュレーションによる評価の結果を表す図3に実線と点線とで示すように、求められた高度ΔALTの真の値に対する偏差が大きい場合であっても、測位結果の偏差は従来例に比べて大幅に小さな値に抑えられる。
【0045】
さらに、本発明は、ソフトウェアのみにより実現可能であるため、広く普及している携帯電話端末その他の可搬可能な端末装置に内蔵されたGPS受信機に対しても、ハードウェアの構成が変更されることなく余剰の処理量や資源の活用により適用可能である。
【0046】
なお、本実施形態では、拘束条件として適用される高度は、地図データベースから取得されている。
しかし、このような拘束条件は、所望の精度で確度高く得られるならば、以下に列記する物理量の何れであってもよい。
【0047】
(1) 電波高度計等の航行援助装置によって計測された(あるいは気圧計によって与えられた気圧の換算によって得られた)高度
(2) 船舶において行われる測位の基準として予め与えられた(あるいは適宜計測された)喫水位置
【0048】
(3) 空港内に位置する車両や航空機について、測位の基準として予め与えられた(あるいは適宜計測された)空港の高度
(4) コンテナーヤードに位置する車両について、測位の基準として予め測量された(あるいは適宜計測された)ヤード面の高度
【0049】
(5) 移動体の特定の方向に対する既知の移動速度(例えば、垂直方向における速度(=0))
(6) 鉄道等の軌道(形成あるいは敷設される地理的な領域が既知である。)上を移動する移動体のその軌道上の位置として特定される地理的な位置
【0050】
また、本実施形態では、拘束条件として所望の複数の物理量が適用されることにより、測位精度のさらなる向上が図られてもよい。
【0051】
さらに、既述の地図データベースは、本実施形態に係るGPS受信機に内蔵されてもよく、あるいは測位演算部13がインタネット等の通信路を介してアクセス可能に構成された地図データベースであってもよい。
【0052】
また、本実施形態では、アンテナ11の位置を示す座標は、既述の緯度LAT、経度LON、高度ALTとなっている。
しかし、このような座標は、所望の精度で与えられる既知の物理量による拘束条件がその物理量に伴う誤差の存在を前提として評価可能であるならば、ECEF(Earth-Centered Earth-Fixed)直交座標系その他の如何なる座標系で与えられてもよい。
【0053】
さらに、本発明は、単なる測位だけではなく、例えば、移動体の姿勢の検出のためにその移動体の異なる複数の部位について行われる測位に個別に適用されてもよい。
【0054】
また、本実施形態では、誤差ε1〜εpは、既述の誤差設定要因に応じて設定されるが、更新されていない。
しかし、これらの誤差ε1〜εpは、例えば、既述の連立方程式の解として偏差ΔLAT、ΔLON、ΔALT、Δtが求められた(図2ステップS9)後、これらの偏差ΔLAT、ΔLON、ΔALT、Δtが観測方程式(4) に代入されることによってなる連立方程式の解として求められる誤差ε1′〜εp′に適宜更新される(図2ステップS10)ことによって、最適化されてもよい。
【0055】
さらに、本実施形態では、衛星番号j(=1〜p)のGPS衛星毎に偏差ΔLAT、ΔLON、ΔALT、Δtをそれぞれ求めるための推定値は、個々の該当するGPS衛星について先行して求められた緯度、経度、高度および時刻で代替されてもよい。
【0056】
また、本実施形態では、擬似距離残差ベクトルΔρの要素である擬似距離残差Δρj(=1〜p)を与える基準値は、これらの擬似距離残差Δρj(=1〜p)に先行して求められた擬似距離で代替されてもよい。
【0057】
また、本実施形態では、以下に列記する何れの場合にも、既述の時間関数x(t)、u(t)、y(t)の相互の関係は、厳密には「線形動的システム」と見なすことはできない。
(1) 上記推定値が先行した時点で求められた緯度、経度、高度および時刻で代替される場合
(2) 同様の推定値を得るためにも本発明が適用される場合
【0058】
しかし、本発明は、これらの時間関数x(t)、u(t)、y(t)の定常性が所望の精度で保証される頻繁や周期で本発明が適用される場合には、本発明は、既述の原理が基本的に損なわれず、かつ既述の作用効果が同様に達成される。
【0059】
さらに、本発明は、GPSに限定されず、例えば、構築や開発が進められているグロナス、ガリレオ、コンパスその他の多様な衛星航法に適応する受信機にも、同様に適用可能である。
【0060】
また、本実施形態では、偏差ΔLAT、ΔLON、ΔALT、Δtは、既述の連立方程式に重み付き最小自乗法が適用されることによって、その連立法定式の解としてを求められている。
しかし、このような連立方程式の解法は、既述の拘束条件を所望の精度で満たすことが可能であるならば、最小自乗法以外の如何なる解法であってもよい。
【0061】
さらに、本実施形態では、偏差ΔLAT、ΔLON、ΔALT、Δtの内、所望の一部のみが上記連立法定式の解として求められてもよい。
【0062】
また、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0063】
以下、本願に開示された発明の内、「特許請求の範囲」に記載しなかった発明の構成、作用および効果を「特許請求の範囲」および「課題を解決するための手段」の欄の記載に準じた様式により記載する。
【0064】
[請求項6]
請求項1ないし請求項5の何れか1項に記載の測位支援装置において、
前記解として求められた偏差Δa1〜Δap,Δq1〜Δqαが前記連立方程式に代入されてなる連立方程式の解である誤差εj′
(1≦j≦(p+α)(p>n))に、前記誤差εj
(1≦j≦(p+α)(p>n))を更新する手段を有する
ことを特徴とする測位支援装置。
【0065】
このような構成の測位支援装置では、前記解として求められた偏差Δa1〜Δap,Δq1〜Δqαが前記連立方程式に代入されてなる連立方程式の解である誤差εj′
(1≦j≦(p+α)(p>n))に、前記誤差εj
(1≦j≦(p+α)(p>n))が更新される。
【0066】
すなわち、連立方程式に含まれる誤差εj
(1≦j≦(p+α)(p>n))は、その連立方程式の解として求められた新たな偏差Δa1〜Δan,Δq1〜Δqαに適応する値εj′
(1≦j≦(p+α)(p>n))に逐次更新される。
【0067】
したがって、本発明が適用された測位系では、このようなεj(1≦j≦(p+α)(p>n))に予測不可能な変動を伴い、あるいはその変動の要因が未知である場合であっても、測位の精度が高められ、かつ安定に維持される。
【符号の説明】
【0068】
11 アンテナ
12 受信部
13 測位演算部
14 地図データベース参照部
【技術分野】
【0001】
本発明は、衛星航法に基づいて行われる測位の精度を高める測位支援装置に関する。
【背景技術】
【0002】
GPS受信機に内蔵され、あるいは別体に備えられた測位演算装置は、GPS衛星から到来した受信波に所定の演算を施すことにより測位を実現する。
このような測位演算装置では、GPS受信機が位置する地点の高度等の既知の情報が拘束条件として適用されることにより、測位の精度の向上が図られる場合がある。
【0003】
なお、本発明に関連性がある先行技術としては、以下に列記する発明があった。
(1) 「車両から収集記録した情報から車両の挙動を再現する車両挙動再現方法において、少なくとも2時点以上について車両の通過した時間,位置,姿勢の情報を指示した概略動作情報を定義するステップと、車両から収集記録した規定時間間隔毎の車両挙動情報を参照し、前記該概略動作情報を拘束条件として、当該拘束条件との差分が最小になるように、前記車両挙動情報を補正して、前記概略動作情報を設定した時点以外の時点における車両の位置及び姿勢を演算する挙動推定を行うステップとを有する」ことにより、「高精度のセンサの利用や、詳細な動作設定を行うことなく、車両から取得した車両情報から、詳細な車両の挙動を推定する」点に特徴がある車両挙動再現方法…特許文献1
【0004】
(2) 「GPS衛星からの電波をアンテナを介して受信する第1の受信機と、GPS衛星からの電波をアンテナを介して受信する第2の受信機と、GPS衛星からの電波をアンテナを介して受信する第3の受信機と、第1の受信機からのデータを取得する第1のデータ処理装置と、第2の受信機及び第3の受信機からのデータと、前記第1のデータ処理装置からのデータを取得する第2のデータ処理装置とを備え、GPS衛星からの電波を受信して位置を算出する絶対位置算出方法において、先ず、第1の受信機、第2の受信、及び第3の受信機を用いて、それぞれの計測地点で、GPS衛星からのデータを取得し、次に、第2の受信機と第3の受信機の計測地点間の距離を拘束条件としフィルタリング処理を行い、絶対位置の算出を行う」ことにより、「絶対位置の算出および位置計測の精度を従来例より高める」点に特徴がある絶対位置算出方法…特許文献2
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−204304号公報
【特許文献2】特開2008−083000号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上述した従来の測位演算装置では、拘束条件が必ずしも成立しないにもかかわらず厳密に適用されるために、その拘束条件に含まれ得る誤差等により生じる測位結果の誤差が許容できない程度に大きくなる場合があった。
【0007】
すなわち、従来例では、測位の精度は、拘束条件が必ずしも適切に適用されないために、十分に確保できない可能性があった。
【0008】
本発明は、ハードウェアおよびソフトウェアの構成の複雑化と処理量の大幅な増加との何れも伴うことなく、柔軟に測位の精度を高め、かつ安定に維持できる測位支援装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
請求項1に記載の発明では、衛星航法に基づく測位に供される複数pの航行衛星毎に、
前記測位に供される座標系の要素ai
(1≦i≦n)と、前記測位の過程で既知である物理量q1〜qα(α≧1)とのそれぞれの基準値に対する偏差Δa1〜Δan,Δq1〜Δqαと、
前記複数の航行衛星の距離と既知の物理量の換算により得られた距離との何れか一方であるρj
(1≦j≦(p+α),(p>n))の残差Δρj
の標準値と、前記標準値に含まれる誤差εj (1≦j≦(p+α),(p>n))との差を与える係数列hj1〜hjn,hj(n+1)〜hj(n+α)とに対して、Δρj=(hj1・Δa1+…+hjn・Δan+hj(n+1)・Δq1+…+hj(n+α)・Δqα)+εjが成立する連立方程式の解として、前記偏差Δa1〜Δan,Δq1〜Δqαの全てまたは一部を求める。
【0010】
すなわち、上記偏差Δa1〜Δan,Δq1〜Δqαは、何れも、既知の物理量q1〜qαに基づく拘束条件がその拘束条件に誤差が伴い得ることを前提として組み込まれた連立方程式の解として求められる。
【0011】
請求項2に記載の発明では、請求項1に記載の測位支援装置において、前記物理量q1〜qαの数が複数である。
【0012】
すなわち、偏差Δa1〜Δan,Δq1〜Δqαを与える連立方程式の解法に適用される拘束条件が増加するため、これらの偏差Δa1〜Δan,Δq1〜Δqαの精度が高められる。
【0013】
請求項3に記載の発明では、請求項1に記載の測位支援装置において、前記物理量q1〜qαは、前記衛星航法に基づいて前記測位の結果に含まれるべき高度である。
【0014】
すなわち、拘束条件は、測位によって求められ得る高度によって設定される。
【0015】
請求項4に記載の発明では、請求項1ないし請求項3の何れか1項に記載の測位支援装置において、前記基準値は、前記要素ai
(1≦i≦n)と前記物理量q1〜qαとの先行して求められた値である。
【0016】
すなわち、上記基準値を得る処理は、既述の先行して求められた要素ai
(1≦i≦n)と物理量q1〜qαとの記憶および参照を行う簡便な処理として実現される。
【0017】
請求項5に記載の発明では、請求項1ないし請求項4の何れか1項に記載の測位支援装置において、前記標準値は、前記残差Δρj
の先行して求められた値である。
【0018】
すなわち、上記基準値を得る処理は、既述の先行して求められた記残差Δρj
の記憶および参照を行う簡便な処理として実現される。
【発明の効果】
【0019】
本発明が適用された測位系では、上記拘束条件は、その拘束条件の誤差が小さいほど厳密に適用されるため、このような誤差が広範に増減し得る場合であっても精度が高められ、かつ安定に維持される。
また、本発明は、拘束条件を得るために、ハードウェアの構成の変更と、ソフトウェアの大幅な変更や追加とを伴うことなく実現される。
さらに、本発明によれば、処理量の削減に併せて、応答性の向上が図られる。
したがって、本発明が適用された測位系は、安価に信頼性および性能が高められ、かつ多様な環境および分野に対する柔軟な適応が可能となる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施形態を示す図である。
【図2】本実施形態における測位演算部の動作フローチャートである。
【図3】本実施形態によって達成される測位結果の精度を示す図である。
【発明を実施するための形態】
【0021】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
図1は、本発明の一実施形態を示す図である。
図において、アンテナ11の給電点は受信部12のアンテナ端子に接続され、その受信部12の復調出力は測位演算部13の第一の入力に接続される。測位演算部13の第一の出力には、後述する測位結果が出力される。測位演算部13の第二の出力は地図データベース参照部14の入力に接続され、その地図データベース参照部14の出力は測位演算部13の第二の入力に接続される。地図データベース参照部14は図示されない地図データベースに接続される。
【0022】
図2は、本実施形態における測位演算部の動作フローチャートである。
以下、図1および図2を参照して本実施形態における各部の一般的な動作を説明する。
受信部12は、各GPS衛星からアンテナ11に到来した受信波を復調する。測位演算部13は、このような復調によって得られたデータに衛星航法に基づく所定の処理を施すことによって、アンテナ11の位置を求める。以下では、このような処理を「測位演算」という。
【0023】
また、測位演算部13は、上記測位演算の下で所定の精度で求められた測位の結果(以下、「概算測位結果」という。) を地図データベース参照部14に与える。
地図データベース参照部14は、その概算測位結果に基づいて既述の地図データベースを参照することにより、アンテナ11が位置する地点の高度を取得し、その高度を測位演算部13に与える。
【0024】
以下、本実施形態の原理を説明する。
本実施形態では、測位演算に供されるGPS衛星の数pと、これらのGPS衛星の識別に供されるユニークな識別子(以下、「衛星番号」という。)j(1≦j≦p)と、その衛星番号jで示されるGPS衛星の擬似距離の残差(以下、「擬似距離残差」という。)Δρj と、上記GPS衛星(ここでは、衛星番号として(p+1)を付与する。)の擬似距離に対する既知の物理量qの換算により得られた擬似距離の残差Δρp+1 とは、下式(1) のような擬似距離残差ベクトルΔρとして表すことができる。
【数1】
【0025】
また、測位演算部13が測位演算の演算対象を得るために行う前置処理の対象と、その前置処理の過程を示す状態と、この前置処理の結果とは、何れも時間tの関数であって、それぞれx(t)、u(t)、y(t)と表すことができる。さらに、これらの時間関数x(t)、u(t)、y(t)の相互の関係は、一般に、以下の条件が成立する「線形動的システム」と見なすことができる。
【0026】
(1) x(t)の時間tに対する変化率(勾配)がx(t)とu(t)との線形結合(一次結合)として与えられる。
(2) y(t)がx(t)とu(t)との線形結合(一次結合)として与えられる。
【0027】
また、本実施形態では、上記線形動的システムは、以下の事項(1)〜(4)が成立する系と見なすことができる。
(1) 前置処理の対象x(t)については、下式(2) に示すように、アンテナ11の位置を示す緯度LAT、経度LON、高度ALTと、本実施形態に内蔵された時計(図示されない。)が与える時刻tとのそれぞれの偏差ΔLAT、ΔLON、ΔALT、Δtを要素とする位置ベクトルΔPと見なすことができる。ここに、本願の特許請求の範囲では、上記偏差ΔLAT、ΔLON、Δtが「座標系の要素ai(1≦i≦n)の偏差Δa1〜Δan」に相当し、かつ上記偏差ΔALTが「物理量q1〜qα(α≧1)の偏差Δq1〜Δqα」に相当する。
【数2】
【0028】
(2) 前置処理の過程を示す状態u(t)については、下式(3) に示すように、上記擬似距離残差ベクトルΔρの要素であるΔρ1〜Δρp,Δρp+1
の標準値にそれぞれ含まれる誤差を示す誤差ベクトルεと見なすことができる。
【数3】
【0029】
(3) 前置処理の結果y(t)については、既述の擬似距離残差ベクトルΔρと見なすことができる。
(4) したがって、このような擬似距離残差ベクトルΔρは、既述の位置ベクトルΔPおよび誤差ベクトルεに併せて、上記Δρ1〜Δρp,Δρp+1 の標準値と誤差ベクトルεの要素ε1〜εp,εp+1 との差を与える係数行列Hを含み、かつ既述の線形結合(一次結合)に相当する下式(4)(以下、「観測方程式」という。)で示される。
【数4】
【0030】
本発明の特徴は、本実施形態では、以下の演算手順(1)〜(9)に基づいて、アンテナ11の位置を示す緯度LAT、経度LON、高度ALTと、本発明に係る受信機に内蔵された時計(図示されない。)が与える時刻tとのそれぞれの偏差ΔLAT、ΔLON、ΔALT、Δtが測位演算部13によって求められ、かつ測位演算に適用される点にある。
【0031】
(1) 衛星番号j(=1〜p)のGPS衛星のそれぞれの擬似距離ρ1〜ρpを求める(図2ステップS1)。
【0032】
(2) 擬似距離ρ1〜ρpと、これらの擬似距離ρ1〜ρpについて先行して推定された擬似距離ρ01〜ρ0pとに対して下式(5) で示される算術演算により、既述の擬似距離残差Δρjを求める(図2ステップS2)。
Δρj=ρj−ρ0j (j=1〜p) ・・・(5)
【0033】
(3) 衛星番号j(=1〜p)のGPS衛星のそれぞれについて、取得されたエフェメリス(およびアルマナック)に基づいて、緯度LATsatj,経度LONsatjおよび高度ALTsatjを求める(図2ステップS3)。
【0034】
(4) これらの緯度LATsatj,経度LONsatj,高度ALTsatjと同様に先行して推定されたアンテナ11の位置の緯度LAT0,経度LON0,高度ALT0とに対して下式(6)〜(9)で示される算術演算により、既述の係数行列Hの要素hj1,hj2,hj3を求める(図2ステップS4)。
ρ0j={(LATsatj−LAT0)2+(LONsatj−LON0)2
+(ALTsatj−ALT0)2}0.5 …(6)
hj1=−(LATsatj−LAT0)/ρ0j (j=1〜p) …(7)
hj2=−(LONsatj−LON0)/ρ0j (j=1〜p) …(8)
hj3=−(ALTsatj−ALT0)/ρ0j (j=1〜p) …(9)
【0035】
なお、上式(7),(8),(9)は、下式(10)〜(12)に示すように、緯度LAT,経度LON,高度ALTのそれぞれに対する擬似距離ρj
の変化率に相当する。
hj1=∂ρj/∂LAT≒∂ρj0/∂LAT0 …(10)
hj2=∂ρj/∂LON≒∂ρj0/∂LON0 …(11)
hj3=∂ρj/∂ALT≒∂ρj0/∂ALT0 …(12)
【0036】
(5) 衛星番号j(=p+1)に対応する係数行列Hの要素h(p+1)1〜h(p+1)4を以下の通りに設定する(図2ステップS5)。
[h(p+1)1 h(p+1)2 h(p+1)3 h(p+1)4]=[0 0 1 0]
【0037】
(6) 衛星番号j(=1〜p)のそれぞれについて、上記係数行列Hの要素hj4を光速cに設定する(図2ステップS6)。
【0038】
(7) 衛星番号j(=1〜p)のGPS衛星のそれぞれに対して予め適切な値として求められ、これらのGPS衛星のアンテナ11に対する仰角等(以下、「誤差設定要因」という。)に応じて定まる誤差ε1〜εpを求める(図2ステップS7)。
【0039】
(8) 擬似距離残差Δρp+1 を既述の地図データベースに登録された高度と同じ値に設定し、かつ誤差εp+1
をその地図データベースに登録された高度の誤差と同じ値に設定する(図2ステップS8)。
【0040】
(9) 以上の一連の処理(図2ステップS1〜S8)によって求められた各値が既述の観測方程式(4) に代入されることによってなる連立方程式に重み付き最小自乗法を適用することにより、その連立方程式の解として偏差ΔLAT、ΔLON、ΔALT、Δtを求める(図2ステップS9)。なお、上記重み付き最小自乗法に適用される重みは、例えば、上記誤差ε1〜εp,εp+1
の分散σ12〜σp2,σp+12
が小さいほど大きな値に設定される。
【0041】
すなわち、地図データベースから取得される正確な高度が拘束条件として用いられ、その拘束条件に誤差が伴うことを前提として与えられる重みが上記最小自乗法に適用される。
【0042】
さらに、このような拘束条件の誤差と重みとの対応関係は、以下の通りに最適化される。
(1) 誤差が小さいときには、重みが大きく設定されることによって、上記拘束条件が厳密に適用される。
(2) 反対に誤差が大きいときには、重みが小さく設定されることによって、拘束条件が緩やかに適用され、あるいは全く適用されない。
【0043】
したがって、本実施形態では、既述の拘束条件は、誤差の大小にかかわらず共通の演算手順に基づいて測位演算の結果に反映され、その測位演算の精度の向上に確度高く安定に寄与する。
【0044】
また、本実施形態では、本発明のシミュレーションによる評価の結果を表す図3に実線と点線とで示すように、求められた高度ΔALTの真の値に対する偏差が大きい場合であっても、測位結果の偏差は従来例に比べて大幅に小さな値に抑えられる。
【0045】
さらに、本発明は、ソフトウェアのみにより実現可能であるため、広く普及している携帯電話端末その他の可搬可能な端末装置に内蔵されたGPS受信機に対しても、ハードウェアの構成が変更されることなく余剰の処理量や資源の活用により適用可能である。
【0046】
なお、本実施形態では、拘束条件として適用される高度は、地図データベースから取得されている。
しかし、このような拘束条件は、所望の精度で確度高く得られるならば、以下に列記する物理量の何れであってもよい。
【0047】
(1) 電波高度計等の航行援助装置によって計測された(あるいは気圧計によって与えられた気圧の換算によって得られた)高度
(2) 船舶において行われる測位の基準として予め与えられた(あるいは適宜計測された)喫水位置
【0048】
(3) 空港内に位置する車両や航空機について、測位の基準として予め与えられた(あるいは適宜計測された)空港の高度
(4) コンテナーヤードに位置する車両について、測位の基準として予め測量された(あるいは適宜計測された)ヤード面の高度
【0049】
(5) 移動体の特定の方向に対する既知の移動速度(例えば、垂直方向における速度(=0))
(6) 鉄道等の軌道(形成あるいは敷設される地理的な領域が既知である。)上を移動する移動体のその軌道上の位置として特定される地理的な位置
【0050】
また、本実施形態では、拘束条件として所望の複数の物理量が適用されることにより、測位精度のさらなる向上が図られてもよい。
【0051】
さらに、既述の地図データベースは、本実施形態に係るGPS受信機に内蔵されてもよく、あるいは測位演算部13がインタネット等の通信路を介してアクセス可能に構成された地図データベースであってもよい。
【0052】
また、本実施形態では、アンテナ11の位置を示す座標は、既述の緯度LAT、経度LON、高度ALTとなっている。
しかし、このような座標は、所望の精度で与えられる既知の物理量による拘束条件がその物理量に伴う誤差の存在を前提として評価可能であるならば、ECEF(Earth-Centered Earth-Fixed)直交座標系その他の如何なる座標系で与えられてもよい。
【0053】
さらに、本発明は、単なる測位だけではなく、例えば、移動体の姿勢の検出のためにその移動体の異なる複数の部位について行われる測位に個別に適用されてもよい。
【0054】
また、本実施形態では、誤差ε1〜εpは、既述の誤差設定要因に応じて設定されるが、更新されていない。
しかし、これらの誤差ε1〜εpは、例えば、既述の連立方程式の解として偏差ΔLAT、ΔLON、ΔALT、Δtが求められた(図2ステップS9)後、これらの偏差ΔLAT、ΔLON、ΔALT、Δtが観測方程式(4) に代入されることによってなる連立方程式の解として求められる誤差ε1′〜εp′に適宜更新される(図2ステップS10)ことによって、最適化されてもよい。
【0055】
さらに、本実施形態では、衛星番号j(=1〜p)のGPS衛星毎に偏差ΔLAT、ΔLON、ΔALT、Δtをそれぞれ求めるための推定値は、個々の該当するGPS衛星について先行して求められた緯度、経度、高度および時刻で代替されてもよい。
【0056】
また、本実施形態では、擬似距離残差ベクトルΔρの要素である擬似距離残差Δρj(=1〜p)を与える基準値は、これらの擬似距離残差Δρj(=1〜p)に先行して求められた擬似距離で代替されてもよい。
【0057】
また、本実施形態では、以下に列記する何れの場合にも、既述の時間関数x(t)、u(t)、y(t)の相互の関係は、厳密には「線形動的システム」と見なすことはできない。
(1) 上記推定値が先行した時点で求められた緯度、経度、高度および時刻で代替される場合
(2) 同様の推定値を得るためにも本発明が適用される場合
【0058】
しかし、本発明は、これらの時間関数x(t)、u(t)、y(t)の定常性が所望の精度で保証される頻繁や周期で本発明が適用される場合には、本発明は、既述の原理が基本的に損なわれず、かつ既述の作用効果が同様に達成される。
【0059】
さらに、本発明は、GPSに限定されず、例えば、構築や開発が進められているグロナス、ガリレオ、コンパスその他の多様な衛星航法に適応する受信機にも、同様に適用可能である。
【0060】
また、本実施形態では、偏差ΔLAT、ΔLON、ΔALT、Δtは、既述の連立方程式に重み付き最小自乗法が適用されることによって、その連立法定式の解としてを求められている。
しかし、このような連立方程式の解法は、既述の拘束条件を所望の精度で満たすことが可能であるならば、最小自乗法以外の如何なる解法であってもよい。
【0061】
さらに、本実施形態では、偏差ΔLAT、ΔLON、ΔALT、Δtの内、所望の一部のみが上記連立法定式の解として求められてもよい。
【0062】
また、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0063】
以下、本願に開示された発明の内、「特許請求の範囲」に記載しなかった発明の構成、作用および効果を「特許請求の範囲」および「課題を解決するための手段」の欄の記載に準じた様式により記載する。
【0064】
[請求項6]
請求項1ないし請求項5の何れか1項に記載の測位支援装置において、
前記解として求められた偏差Δa1〜Δap,Δq1〜Δqαが前記連立方程式に代入されてなる連立方程式の解である誤差εj′
(1≦j≦(p+α)(p>n))に、前記誤差εj
(1≦j≦(p+α)(p>n))を更新する手段を有する
ことを特徴とする測位支援装置。
【0065】
このような構成の測位支援装置では、前記解として求められた偏差Δa1〜Δap,Δq1〜Δqαが前記連立方程式に代入されてなる連立方程式の解である誤差εj′
(1≦j≦(p+α)(p>n))に、前記誤差εj
(1≦j≦(p+α)(p>n))が更新される。
【0066】
すなわち、連立方程式に含まれる誤差εj
(1≦j≦(p+α)(p>n))は、その連立方程式の解として求められた新たな偏差Δa1〜Δan,Δq1〜Δqαに適応する値εj′
(1≦j≦(p+α)(p>n))に逐次更新される。
【0067】
したがって、本発明が適用された測位系では、このようなεj(1≦j≦(p+α)(p>n))に予測不可能な変動を伴い、あるいはその変動の要因が未知である場合であっても、測位の精度が高められ、かつ安定に維持される。
【符号の説明】
【0068】
11 アンテナ
12 受信部
13 測位演算部
14 地図データベース参照部
【特許請求の範囲】
【請求項1】
衛星航法に基づく測位に供される複数pの航行衛星毎に、
前記測位に供される座標系の要素ai
(1≦i≦n)と、前記測位の過程で既知である物理量q1〜qα(α≧1)とのそれぞれの基準値に対する偏差Δa1〜Δan,Δq1〜Δqαと、
前記複数の航行衛星の距離と既知の物理量の換算により得られた距離との何れか一方であるρj
(1≦j≦(p+α),(p>n))の残差Δρj
の標準値と、前記標準値に含まれる誤差εj (1≦j≦(p+α),(p>n))との差を与える係数列hj1〜hjn,hj(n+1)〜hj(n+α)とに対して、
Δρj=(hj1・Δa1+…+hjn・Δan
+hj(n+1)・Δq1+…+hj(n+α)・Δqα)+εj
が成立する連立方程式の解として、前記偏差Δa1〜Δan,Δq1〜Δqαの全てまたは一部を求める
ことを特徴とする測位支援装置。
【請求項2】
請求項1に記載の測位支援装置において、
前記物理量q1〜qαの数αが複数である
ことを特徴とする測位支援装置。
【請求項3】
請求項1に記載の測位支援装置において、
前記物理量q1〜qαは、
前記衛星航法に基づいて前記測位の結果に含まれるべき高度である
ことを特徴とする測位支援装置。
【請求項4】
請求項1ないし請求項3の何れか1項に記載の測位支援装置において、
前記基準値は、
前記要素ai (1≦i≦n)と前記物理量q1〜qαとの先行して求められた値である
ことを特徴とする測位支援装置。
【請求項5】
請求項1ないし請求項4の何れか1項に記載の測位支援装置において、
前記標準値は、
前記残差Δρj
の先行して求められた値である
ことを特徴とする測位支援装置。
【請求項1】
衛星航法に基づく測位に供される複数pの航行衛星毎に、
前記測位に供される座標系の要素ai
(1≦i≦n)と、前記測位の過程で既知である物理量q1〜qα(α≧1)とのそれぞれの基準値に対する偏差Δa1〜Δan,Δq1〜Δqαと、
前記複数の航行衛星の距離と既知の物理量の換算により得られた距離との何れか一方であるρj
(1≦j≦(p+α),(p>n))の残差Δρj
の標準値と、前記標準値に含まれる誤差εj (1≦j≦(p+α),(p>n))との差を与える係数列hj1〜hjn,hj(n+1)〜hj(n+α)とに対して、
Δρj=(hj1・Δa1+…+hjn・Δan
+hj(n+1)・Δq1+…+hj(n+α)・Δqα)+εj
が成立する連立方程式の解として、前記偏差Δa1〜Δan,Δq1〜Δqαの全てまたは一部を求める
ことを特徴とする測位支援装置。
【請求項2】
請求項1に記載の測位支援装置において、
前記物理量q1〜qαの数αが複数である
ことを特徴とする測位支援装置。
【請求項3】
請求項1に記載の測位支援装置において、
前記物理量q1〜qαは、
前記衛星航法に基づいて前記測位の結果に含まれるべき高度である
ことを特徴とする測位支援装置。
【請求項4】
請求項1ないし請求項3の何れか1項に記載の測位支援装置において、
前記基準値は、
前記要素ai (1≦i≦n)と前記物理量q1〜qαとの先行して求められた値である
ことを特徴とする測位支援装置。
【請求項5】
請求項1ないし請求項4の何れか1項に記載の測位支援装置において、
前記標準値は、
前記残差Δρj
の先行して求められた値である
ことを特徴とする測位支援装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−159312(P2012−159312A)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−17358(P2011−17358)
【出願日】平成23年1月31日(2011.1.31)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成23年1月31日(2011.1.31)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]