
測位方法、測位プログラム、GNSS受信装置および移動端末
【課題】受信環境に応じた適する方法を選択し、可能な限り単純で高精度な測位演算を実行する。
【解決手段】各GNSS測位信号を捕捉、追尾し、各測位信号(受信信号)のC/Noを算出する(S101,S102)。各受信信号の確度を推定し、高確度な受信信号の数を取得する(S103)。高確度な受信信号の数が4個以上で、且つこれらの高確度な受信信号の最低C/Noが35dB以上であれば(S104:Yes→S105:Yes)、低確度な受信信号を排除して簡素なパラメータ設定で測位演算を行う(S106,S107)。高確度な受信信号数が4個未満、または、高確度な受信信号数が4個以上であっても最低C/Noが35dB未満であれば(S104:NoまたはS105:No)、確度に応じてパラメータ設定した測位演算を行う(S108,S107)。
【解決手段】各GNSS測位信号を捕捉、追尾し、各測位信号(受信信号)のC/Noを算出する(S101,S102)。各受信信号の確度を推定し、高確度な受信信号の数を取得する(S103)。高確度な受信信号の数が4個以上で、且つこれらの高確度な受信信号の最低C/Noが35dB以上であれば(S104:Yes→S105:Yes)、低確度な受信信号を排除して簡素なパラメータ設定で測位演算を行う(S106,S107)。高確度な受信信号数が4個未満、または、高確度な受信信号数が4個以上であっても最低C/Noが35dB未満であれば(S104:NoまたはS105:No)、確度に応じてパラメータ設定した測位演算を行う(S108,S107)。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、GNSS衛星からの測位信号を用いて測位演算を行う測位方法に関するものである。
【背景技術】
【0002】
従来、GNSS衛星からの測位信号を受信して測位を行う測位演算が、多く実用化されており、移動通信端末等の各種電子機器に利用されている。
【0003】
このような測位演算では、測位演算結果の高精度化が求められている。このため、高精度な測位演算を実行するための各種の方法が考案されている。
【0004】
例えば、特許文献1に記載の測位装置では、測位演算に用いるカルマンフィルタの観測誤差分散を、電界強度に基づいて初期値調整する方法が用いられている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−92541号公報
【特許文献2】特開2003−139843号公報
【特許文献3】特開2001−272450号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述の特許文献1に記載の測位装置では、捕捉した測位信号数や、当該捕捉した複数の測位信号における誤差が大きな測位信号と誤差が小さな測位信号との比率に関係なく、捕捉した測位信号をカルマンフィルタに利用している。そして、各測位信号での誤差による測位結果への悪影響を抑圧するように、観測誤差分散の設定を変更している。このため、必ず複雑な処理を必要としてしまう。
【0007】
また、上述の特許文献2に記載の測位装置では、受信信号毎のC/Noに対して閾値を設け、閾値以下のC/Noの受信信号は使用しない。また、特許文献3に記載の測位装置では、電波伝搬環境を判定し、信号レベルが高い受信信号のみを用いて測位演算を行っている。これらの測位方法では、C/Noや信号レベルが低い受信信号が殆ど全てのような環境では、測位演算を行えない。
【0008】
したがって、本発明の目的は、受信環境に応じた適する方法を選択し、可能な限り単純で高精度な測位演算を実行する方法を実現することにある。
【課題を解決するための手段】
【0009】
この発明の測位方法は、GNSS測位信号の受信信号に基づいて該受信信号の確度を推定する確度推定工程と、確度が閾値より大きい受信信号である高確度信号の数を算出する高確度信号数算出工程と、受信信号を用いて測位演算を実行する測位演算工程と、を有する。測位演算工程は、高確度信号の数に基づく測位方式で測位演算を実行する。
【0010】
この方法では、確度の高い受信信号の数に応じて適宜測位方法が選択される。これにより、状況に応じた測位方法で測位演算が行われる。
【0011】
また、この発明の測位方法では、測位演算工程は、高確度信号の数が所定数以上のとき、該高確度信号を用いた第1方式で測位演算を実行する。一方、高確度信号の数が所定数未満のとき、受信信号を用いた第2方式で測位演算を実行する。
【0012】
この方法では、測位演算を二種類用意しておき、高確度信号の数に応じて、いずれかの測位演算を選択的に用いる方法を示している。
【0013】
また、この発明の測位方法では、測位演算工程は、高確度信号の数が所定数以上のとき、該高確度信号以外の受信信号を排除した第1方式で測位演算を実行する。一方、高確度信号の数が所定数未満のとき、受信信号の確度に応じた重み付けをした第2方式で測位演算を実行する。
【0014】
この方法では、第1の測位演算および第2の測位演算の具体的な内容を示している。第1の測位演算は、高確度信号が多い場合に実行され、高確度信号のみで測位演算が行われる。一方、第2の測位演算は、高確度信号が少ない場合に実行され、高確度でない受信信号を含み、受信信号毎に確度に応じた重み付けによる測位演算が行われる。これにより、いずれの測位演算であっても、高精度な測位結果が得られる。
【0015】
また、この発明の測位方法では、受信信号のC/Noを測定するC/No測定工程、をさらに有する。測位演算工程は、高確度信号の数が所定数以上、かつ該高確度信号の前記C/Noの最低値が所定値以上のとき、該高確度信号を用いた第1方式で測位演算を実行する。一方、高確度信号の数が所定数未満、または該高確度信号のC/Noの最低値が所定値未満のとき、受信信号を用いた第2方式で測位演算を実行する。
【0016】
この方法では、測位演算を選択する際の基準を、確度のみでなく、C/Noにも適用した場合を示している。
【0017】
また、この発明の測位方法では、測位演算工程は、高確度信号の数が所定数以上、かつ該高確度信号のC/Noの最低値が所定値以上のとき、該高確度信号以外の受信信号を排除した第1方式で測位演算を実行する。一方、高確度信号の数が所定数未満、または該高確度信号のC/Noの最低値が所定値未満のとき、受信信号の確度に応じた重み付けをした第2方式で測位演算を実行する。
【0018】
この方法では、確度とC/Noとの両方を用いた場合による測位方法の具体的方法を示している。
【0019】
また、この発明の測位方法では、確度推定工程は、受信機自律型完全性監視技術により受信信号の確度を推定する。
【0020】
この方法では、具体的な確度の推定方法を示しており、受信機自立型完全性監視技術、すなわちRAIMを用いた場合を示している。
【0021】
また、この発明の測位方法では、受信信号のコード位相差に基づいて擬似距離を算出する擬似距離算出工程と、受信信号のドップラシフトを測定するドップラシフト測定工程と、をさらに備え、確度推定工程は、所定時間の擬似距離の変化率、およびドップラシフトに基づいて受信信号の確度を推定する。
【0022】
この方法では、具体的な受信信号の確度の推定方法として、観測擬似距離とドップラシフトとを用いた場合を示している。
【0023】
また、この発明の測位方法は、受信信号のC/Noを測定するC/No測定工程、をさらに有する。確度推定工程は、受信信号のC/Noに基づいて該受信信号の確度を推定する。
【0024】
この方法では、具体的な受信信号の確度の推定方法として、C/Noを用いる。これにより、上述の確度による測位方法の選択に、C/Noの情報が反映されるので、C/No単独による測位方法の選択を行わなくてもよい。
【発明の効果】
【0025】
この発明によれば、受信環境に応じて、単純な測位演算処理で高精度な測位結果が算出可能な状況であれば当該単純な測位演算処理を実行し、単純な測位演算処理で高精度な測位結果が算出不可能な状況であれば、状況に応じた測位演算処理により高精度な測位結果を算出することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の実施形態に係る測位方法を示すフローチャートである。
【図2】コード位相差に基づく観測擬似距離の変化量とドップラシフトの変化量とによる確度の検出を用いた場合の測位方法を示すフローチャートである。
【図3】C/Noによる確度の検出を用いた場合の測位方法を示すフローチャートである。
【図4】本発明の実施形態に係る測位装置の主要構成を示すブロック図である。
【図5】本発明の実施形態に係る移動端末の主要構成を示すブロック図である。
【発明を実施するための形態】
【0027】
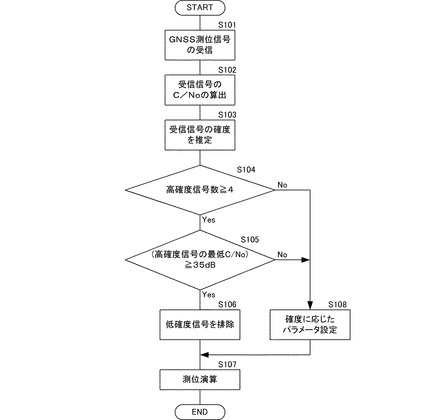
本発明の実施形態に係る測位方法およびこれを実現する測位プログラムや測位装置について、図を参照して説明する。図1は、本実施形態の測位方法を示すフローチャートである。
【0028】
本実施形態の測位方法では、まず、各GNSS衛星からのGNSS測位信号(以下、単に「測位信号」と称する。)を捕捉、追尾する(S101)。
【0029】
次に、捕捉、追尾できている各測位信号(受信信号)のC/Noを算出する(S102)。各測位信号のC/Noは、後述するPunctualのコード相関結果(P相関結果)に基づいて算出される。
【0030】
次に、各測位信号の確度を推定する(S103)。確度の検出方法としては、例えば、次に示すようなRAIM技術を用いるとよい。RAIM技術とは、概略的には、使用可能な測位信号数(受信信号数)が6個以上の場合に、同時に受信した4個の測位信号の組合せ毎に測位演算を実行して、測位演算結果に大きな誤差が生じる組合せから、確度の低い測位信号を検出するものである。このようなRAIM技術を利用し、例えば次に示すような方法で確度の高い測位信号を検出する。
【0031】
(A)使用可能な全ての測位信号で擬似距離の推定算出を行う。次に、推定擬似距離と観測擬似距離とから観測残差を算出する。観測残差の二乗和を算出し、χ二乗検定が棄却されれば、すなわち、予め誤差が少ない場合に得られる誤差(通常誤差と称する。)よりも、誤差が大きければ、次の処理を実行する。
【0032】
各測位信号を1個ずつ排除して、それぞれに測位信号の組合せを設定する。組合せ毎で擬似距離の推定算出を実行し、残差二乗和を得る。そして、組合せ毎にχ二乗検定を行い、採択か棄却かを判定する。棄却となる組合せに含まれるが、採択となる組合せに含まれていない測位信号を、観測誤差が大きな測位信号、すなわち確度が低い測位信号として検出する。そして、この確度が低いと検出された測位信号以外の、捕捉、追尾されている測位信号を、確度の高い測位信号として検出する。
【0033】
(B)測位信号毎に、前回の測位結果から得られる推定位置と、前回の測位時に得られた速度情報と、前回と今回との時間間隔とから、今回の仮推定位置を算出する。そして、今回の観測擬似距離から得られる今回の測位位置が、仮推定位置を基準とする所定範囲内にあるかどうかを判断する。今回の測位位置が仮推定位置を基準とする所定範囲内にあれば、この測位位置に対応する測位信号を、観測誤差の小さい測位信号、すなわち確度の高い測位信号として、検出する。一方、この所定範囲内になければ、この測位位置に対応する測位信号を、観測誤差の大きな測位信号、すなわち確度の低い測位信号として検出する。
【0034】
次に、S103で取得した確度の高い測位信号の数が4個以上であれば(S104:Yes)、各確度の高い測位信号のC/Noを取得する。
【0035】
全ての確度の高い測位信号のC/Noが35dB以上であれば、すなわち確度の高い測位信号のC/Noにおける最小のC/Noが35dB以上であれば(S105:Yes)、これら確度の高い測位信号の擬似距離のみを用いる。すなわち、確度の低い測位信号を排除した上で、測位演算を実行する(S106→S107)。このような確度の低い測位信号を排除した測位演算が、本願発明の「第1の測位方式」に相当する。
【0036】
一方、確度の高い測位信号数が4個未満であるか(S104:No)、確度の高い測位信号数が4個以上であっても、当該確度の高い測位信号群の最小のC/Noが35dB未満であれば(S105:No)、確度に応じたパラメータ設定を行って、測位演算を実行する(S108→S107)。このような確度に応じたパラメータ設定を実行した測位演算が、本願発明の「第2の測位方式」に相当する。
【0037】
具体的に、第1、第2の測位方式の例を、次に示す。
(A)重み付けハッチフィルタを用いたキャリアスムージングへの適用
重み付けハッチフィルタでは、今回の観測擬似距離と、前回の推定擬似距離およびキャリア位相変化量の加算値と、を重み付け加算することで、今回の推定擬似距離を算出する。そして、この重み付け加算のための係数を第1の測位方式と第2の測位方式とにより、異ならせる。
まず、第1の測位方式、すなわち、測位演算から確度の低い測位信号を排除して、確度の高い測位信号のみを用いる場合には、従前に行った実験結果やシミュレーション結果に基づいて、推定擬似距離が安定して得られるような固定の重み付け係数を設定する。
【0038】
一方、第2の測位方式、すなわち、確度に応じたパラメータ設定を行う場合には、測位信号の確度に応じて重み付け係数を適応的に設定する。具体的には、確度の高い測位信号ほど、今回の観測擬似距離の重みが高くなるように設定し、確度の低い測位信号ほど、今回の観測擬似距離の重みが低くなるように設定する。
【0039】
以上のような重み付け係数の設定を行うことで、確度の高い測位信号が測位演算に対して十分な数(4個)以上であり、これら測位信号のC/Noが所定値(35dB)以上である場合には、固定の重み付け係数からなる重み付けハッチフィルタを用いることで、相対的に簡素且つ容易な演算で、高精度な測位結果を得ることができる。
【0040】
一方、確度の高い測位信号が測位演算に対して十分な数(4個)未満であったり、測位信号のC/Noが所定値(35dB)未満であったりする場合には、確度に応じて重み付け係数が適応する。これにより、相対的に測位演算は複雑になるものの、高精度な測位演算結果を得ることができる。
【0041】
(B)航跡フィルタを用いた推定測位演算への適用
以下では、航跡フィルタとしてカルマンフィルタを用いる例を示すが、誤差共分散行列によりフィルタの観測誤差のパラメータ設定を行える推定演算であればよい。
【0042】
航跡フィルタは次式で表すことができる。
【0043】
ρρ(k)=HH・xx(k)+ν(k) −(式1)
この航跡フィルタにおいて、ρρ(k)は演算タイミングkでの観測ベクトルであり、xx(k)は演算タイミングkでの状態ベクトルである。また、HHは方向余弦行列であり、ν(k)は演算タイミングkでの観測誤差である。観測誤差ν(k)は、誤差共分散行列RR(k)且つ零平均の多変数正規(ガウス)分布に従っている。したがって、観測誤差ν(k)は、ν(k)〜N(0,RR)で定義される。このような航跡フィルタにおける観測誤差ν(k)の誤差共分散行列RR(k)の構成要素を、第1の測位方式と第2の測位方式とにより異なる。
【0044】
まず、第1の測位方式、すなわち、測位演算から確度の低い測位信号を排除して、確度の高い測位信号のみを用いる場合には、従前に行った実験結果やシミュレーション結果に基づいて、推定擬似距離が安定して得られるような固定値に、上述の誤差共分散行列RR(k)の各構成要素を設定する。
【0045】
一方、第2の測位方式、すなわち、確度に応じたパラメータ設定を行う場合、測位信号の確度に応じて誤差共分散行列RR(k)の各構成要素を適応的に設定する。具体的には、確度の高い測位信号ほど、誤差共分散行列RR(k)の各構成要素である誤差分散が小さくなるように設定し、確度の低い測位信号ほど、誤差共分散行列RR(k)の各構成要素である誤差分散が大きくなるように設定する。
【0046】
以上のような誤差分散行列の設定を行うことで、確度の高い測位信号が測位演算に対して十分な数(4個)以上であり、これら測位信号のC/Noが所定値(35dB)以上である場合には、各構成要素(誤差分散)が固定値に設定された誤差共分散行列RR(k)からなる航跡フィルタを用いることで、相対的に簡素且つ容易な演算で、高精度な測位結果を得ることができる。
【0047】
一方、確度の高い測位信号が測位演算に対して十分な数(4個)未満であったり、測位信号のC/Noが所定値(35dB)未満であったりする場合には、確度に応じて誤差共分散行列RR(k)の各行列要素(誤差分散)が適応する。これにより、相対的に測位演算は複雑になるものの、高精度な測位演算結果を得ることができる。
【0048】
なお、上述の説明では、観測擬似距離と推定擬似距離との誤差や観測値と推定値との差に基づく観測誤差から確度を検出する例を示した。しかしながら、コード位相差に基づく観測擬似距離の変化量とドップラシフトの変化量とから確度を検出することもできる。また、C/Noから確度を検出することもできる。
【0049】
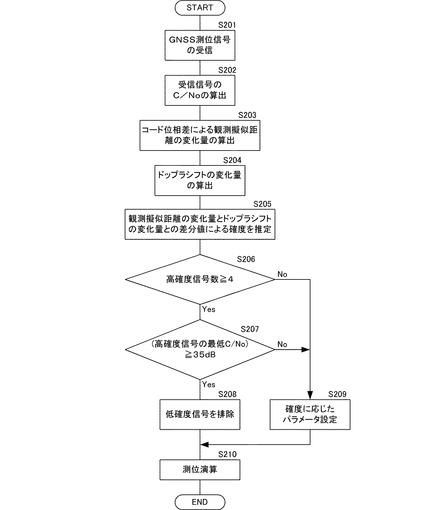
図2は、コード位相差に基づく観測擬似距離の変化量とドップラシフトの変化量とによる確度の検出を用いた場合の測位方法を示すフローチャートである。なお、本フローは、確度の検出にコード位相差に基づく観測擬似距離の変化量とドップラシフトの変化量を用いている点を除き、上述の図1に示した測位方法のフローチャートと同じである。
【0050】
この方法では、受信信号のC/Noの算出(S202)後に、コード位相差による観測擬似距離を複数エポックに亘り算出し、観測擬似距離の変化量を順次取得する(S203)。同時に、ドップラシフトの変化量を順次取得する(S204)。
【0051】
次に、観測擬似距離の変化量とドップラシフトの変化量との差分値から、確度を検出する(S205)。具体的には、観測擬似距離の変化量とドップラシフトの変化量との差分値が大きい測位信号は、確度が低いと検出する。一方、観測擬似距離の変化量とドップラシフトの変化量との差分値が小さい測位信号は、確度が高いと検出する。
【0052】
以下、確度の決定後のフローは、上述の図1のフローと同じである。このような方法であっても、確度に応じた最適な測位演算を行うことができる。
【0053】
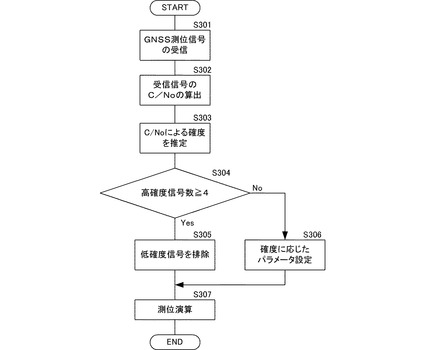
一方、C/Noによる確度の検出方法を用いた場合は、次のフローにより測位演算が実行される。図3は、C/Noによる確度の検出を用いた場合の測位方法を示すフローチャートである。
【0054】
この方法では、各受信信号のC/Noを算出(S302)後に、C/Noに基づいて確度を検出する(S303)。具体的には、例えばC/Noが35dB以上であれば、当該測位信号は確度が高いものと判断する。一方、C/Noが35dB未満であれば、当該測位信号は確度が低いものと判断する。このようなC/Noによる確度の検出を行うと、図1に示したようなC/Noによる測位方法の選択が、確度による測位方法の選択に含まれる。これにより、さらに簡素なフローで測位方法を決定することができる。
【0055】
なお、これらの確度検出方法は、一例であり、他の方法を用いてもよい。これらを適宜組み合わせて、確度を検出することもできる。
【0056】
また、上述の方法では、確度を検出して測位方法を選択する例を示しているが、例えば、C/Noに応じて重み付け係数を設定する方法を用いてもよい。
【0057】
具体的には、C/Noが50dBの場合に重みを「1」として、C/Noの低下とともに重みを低くするようにしてもよい。この場合、重みは指数的に低下させるとよい。
【0058】
また、具体的には、C/Noの変化量を基準に重みを設定してもよい。この場合、C/Noの変化量が「0」ならば重みを「1」とし、変化量が大きくなるほど、重みを低くするようにしていもよい。この場合も、重みを指数的に低下させるとよい。
【0059】
さらには、これらのC/NoやC/Noの変化量に依存する重みを用いて、これらの平均値を測位演算の重みに設定してもよい。
【0060】
そして、以上のような方法を用いれば、測位信号毎の誤差の大小が、そのまま重みに反映されるので、より正確な測位演算が可能になる。
【0061】
次に、上述の測位方法を実現する測位装置の構成について、図4を参照して説明する。図4は本発明の実施形態に係る測位装置の主要構成を示すブロック図である。
【0062】
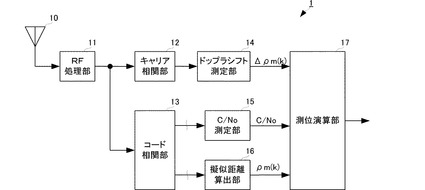
本実施形態の測位装置1は、アンテナ10、RF処理部11、キャリア相関部12、コード相関部13、ドップラシフト測定部14、C/No測定部15、擬似距離算出部16、および測位演算部17を備える。なお、本実施形態では、キャリア相関部13およびコード相関部14を個別に構成する例を示しているが、所謂コード相関結果をキャリア相関処理に利用し、キャリア相関結果をコード相関処理に利用する、所謂コード−キャリア統合追尾ループを用いてもよい。
【0063】
アンテナ10は、各測位衛星からの測位信号を受信し、RF処理部11へ出力する。RF処理部11は、測位信号を中間周波数にダウンコンバートしてIF信号を生成し、キャリア相関部12およびコード相関部13へ出力する。
【0064】
キャリア相関部12は、測位信号の周波数に基づいて予め設定されたキャリア周波数信号とIF信号とをキャリア相関処理して、キャリア相関結果をΔレンジ測定部14へ出力する。
【0065】
コード相関部13は、IF信号をキャリア周波数信号でベースバンド変換したベースバンド信号とレプリカ信号とをコード相関処理する。この際、コード相関部13は、各測位衛星からの測位信号毎にコード相関処理を行う。
【0066】
また、コード相関部13は、測位信号毎に、P(Punctual)相関部、E(Early)相関部、およびL(Late)相関部を備える。コード相関部14は、E(Early)相関部からのE相関結果とL(Late)相関部からのL相関結果に基づいて、測位信号毎にコード追尾処理を行うとともに、各相関処理タイミングでのE相関結果とL相関結果との差分値からなるE−L相関値を所定時間積算し、擬似距離算出部16へ出力する。また、コード相関部13は、測位信号毎にP相関結果をC/No測定部15へ出力する。
【0067】
ドップラシフト測定部14は、キャリア相関結果からドップラ周波数を算出し、当該ドップラ周波数の所定時間長(例えば1秒)分を積分することで、観測ドップラシフトΔρm(k)を算出する。
【0068】
C/No測定部15は、P相関結果を所定時間長(例えば1秒間)記憶し、これら記憶した時間軸上に列ぶ複数のPunctualの位相差データをFFT処理等の周波数変換処理し、時間軸上のスペクトルと周波数軸上のスペクトルとからなる二次元の相関スペクトルからC/Noを測定する。なお、ここでは、二次元の相関スペクトルによる相関結果からC/Noを測定しているが、他の方法を用いてもよい。
【0069】
擬似距離算出部16は、コード相関部13からのE−L相関結果に基づいて、既知の方法から観測擬似距離ρm(k)を算出する。
【0070】
測位演算部17は、上述のようなRAIM技術を利用し、取得した測位信号毎の観測擬似距離ρm(k)や観測ドップラシフトΔρm(k)等を用いて、固定のパラメータ設定で仮測位を行い、仮測位結果に基づいて、確度の低い測位信号および確度の高い測位信号を検出する。なお、確度の検出にドップラシフトを用いる必要がない場合には、ドップラシフト測定部14を省略することも可能である。また、測位演算部17は、上述のように、C/Noのみから確度を算出したり、観測擬似距離とドップラシフトとから確度を算出することもできる。
【0071】
測位演算部17は、確度の高い測位信号が測位演算に対して十分な数(4個)以上であり、これら測位信号のC/Noが所定値(35dB)以上である場合には、固定パラメータを用いた相対的に簡素且つ容易な測位演算を行う。一方、測位演算部17は、確度の高い測位信号が測位演算に対して十分な数(4個)未満であったり、測位信号のC/Noが所定値(35dB)未満であったりする場合には、確度に応じてパラメータを設定する相対的に複雑な測位演算を行う。これにより、受信環境に応じて測位演算の負荷を調整しながら、高精度な測位演算結果を得ることができる。
【0072】
なお、上述の説明では、機能ブロックによる構成で、上述の測位方法を実現する例を示したが、上述の測位方法をプログラム化して、メモリに記憶しておき、CPUで当該プログラムを処理演算して、測位演算処理を実行するようにしてもよい。
【0073】
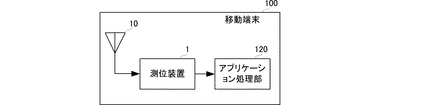
そして、このような測位装置1や測位演算機能は、図5に示すような移動端末100に利用される。図5は、本実施形態の測位装置1を備えた移動端末100の主要構成を示すブロック図である。
【0074】
図5に示すような移動端末100は、例えば携帯電話機、カーナビゲーション装置、PND、カメラ、時計等であり、アンテナ10、測位装置1、アプリケーション処理部120を備える。
【0075】
アンテナ10は図4に示したアンテナと同じであり、図5に示す測位装置1は、上述の図4の測位装置1や測位演算機能部であり、自装置の位置や相対速度等を推定算出して、アプリケーション処理部120へ出力する。アプリケーション処理部120は、得られた測位結果に基づいて、自装置位置や自装置速度を表示したり、ナビゲーション等に利用するための処理を実行する。このような構成において、上述のように受信環境に応じて適する処理負荷で高精度な測位結果を得られることで、受信環境に応じた最適な処理演算で高精度な位置表示やナビゲーション等を実現することができる。
【符号の説明】
【0076】
1−測位装置、10−アンテナ、11−RF処理部、12−キャリア相関部、13−コード相関部、14−ドップラシフト測定部、15−C/No測定部、16−擬似距離算出部、17−測位演算部、100−移動端末、120−アプリケーション処理部
【技術分野】
【0001】
この発明は、GNSS衛星からの測位信号を用いて測位演算を行う測位方法に関するものである。
【背景技術】
【0002】
従来、GNSS衛星からの測位信号を受信して測位を行う測位演算が、多く実用化されており、移動通信端末等の各種電子機器に利用されている。
【0003】
このような測位演算では、測位演算結果の高精度化が求められている。このため、高精度な測位演算を実行するための各種の方法が考案されている。
【0004】
例えば、特許文献1に記載の測位装置では、測位演算に用いるカルマンフィルタの観測誤差分散を、電界強度に基づいて初期値調整する方法が用いられている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−92541号公報
【特許文献2】特開2003−139843号公報
【特許文献3】特開2001−272450号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述の特許文献1に記載の測位装置では、捕捉した測位信号数や、当該捕捉した複数の測位信号における誤差が大きな測位信号と誤差が小さな測位信号との比率に関係なく、捕捉した測位信号をカルマンフィルタに利用している。そして、各測位信号での誤差による測位結果への悪影響を抑圧するように、観測誤差分散の設定を変更している。このため、必ず複雑な処理を必要としてしまう。
【0007】
また、上述の特許文献2に記載の測位装置では、受信信号毎のC/Noに対して閾値を設け、閾値以下のC/Noの受信信号は使用しない。また、特許文献3に記載の測位装置では、電波伝搬環境を判定し、信号レベルが高い受信信号のみを用いて測位演算を行っている。これらの測位方法では、C/Noや信号レベルが低い受信信号が殆ど全てのような環境では、測位演算を行えない。
【0008】
したがって、本発明の目的は、受信環境に応じた適する方法を選択し、可能な限り単純で高精度な測位演算を実行する方法を実現することにある。
【課題を解決するための手段】
【0009】
この発明の測位方法は、GNSS測位信号の受信信号に基づいて該受信信号の確度を推定する確度推定工程と、確度が閾値より大きい受信信号である高確度信号の数を算出する高確度信号数算出工程と、受信信号を用いて測位演算を実行する測位演算工程と、を有する。測位演算工程は、高確度信号の数に基づく測位方式で測位演算を実行する。
【0010】
この方法では、確度の高い受信信号の数に応じて適宜測位方法が選択される。これにより、状況に応じた測位方法で測位演算が行われる。
【0011】
また、この発明の測位方法では、測位演算工程は、高確度信号の数が所定数以上のとき、該高確度信号を用いた第1方式で測位演算を実行する。一方、高確度信号の数が所定数未満のとき、受信信号を用いた第2方式で測位演算を実行する。
【0012】
この方法では、測位演算を二種類用意しておき、高確度信号の数に応じて、いずれかの測位演算を選択的に用いる方法を示している。
【0013】
また、この発明の測位方法では、測位演算工程は、高確度信号の数が所定数以上のとき、該高確度信号以外の受信信号を排除した第1方式で測位演算を実行する。一方、高確度信号の数が所定数未満のとき、受信信号の確度に応じた重み付けをした第2方式で測位演算を実行する。
【0014】
この方法では、第1の測位演算および第2の測位演算の具体的な内容を示している。第1の測位演算は、高確度信号が多い場合に実行され、高確度信号のみで測位演算が行われる。一方、第2の測位演算は、高確度信号が少ない場合に実行され、高確度でない受信信号を含み、受信信号毎に確度に応じた重み付けによる測位演算が行われる。これにより、いずれの測位演算であっても、高精度な測位結果が得られる。
【0015】
また、この発明の測位方法では、受信信号のC/Noを測定するC/No測定工程、をさらに有する。測位演算工程は、高確度信号の数が所定数以上、かつ該高確度信号の前記C/Noの最低値が所定値以上のとき、該高確度信号を用いた第1方式で測位演算を実行する。一方、高確度信号の数が所定数未満、または該高確度信号のC/Noの最低値が所定値未満のとき、受信信号を用いた第2方式で測位演算を実行する。
【0016】
この方法では、測位演算を選択する際の基準を、確度のみでなく、C/Noにも適用した場合を示している。
【0017】
また、この発明の測位方法では、測位演算工程は、高確度信号の数が所定数以上、かつ該高確度信号のC/Noの最低値が所定値以上のとき、該高確度信号以外の受信信号を排除した第1方式で測位演算を実行する。一方、高確度信号の数が所定数未満、または該高確度信号のC/Noの最低値が所定値未満のとき、受信信号の確度に応じた重み付けをした第2方式で測位演算を実行する。
【0018】
この方法では、確度とC/Noとの両方を用いた場合による測位方法の具体的方法を示している。
【0019】
また、この発明の測位方法では、確度推定工程は、受信機自律型完全性監視技術により受信信号の確度を推定する。
【0020】
この方法では、具体的な確度の推定方法を示しており、受信機自立型完全性監視技術、すなわちRAIMを用いた場合を示している。
【0021】
また、この発明の測位方法では、受信信号のコード位相差に基づいて擬似距離を算出する擬似距離算出工程と、受信信号のドップラシフトを測定するドップラシフト測定工程と、をさらに備え、確度推定工程は、所定時間の擬似距離の変化率、およびドップラシフトに基づいて受信信号の確度を推定する。
【0022】
この方法では、具体的な受信信号の確度の推定方法として、観測擬似距離とドップラシフトとを用いた場合を示している。
【0023】
また、この発明の測位方法は、受信信号のC/Noを測定するC/No測定工程、をさらに有する。確度推定工程は、受信信号のC/Noに基づいて該受信信号の確度を推定する。
【0024】
この方法では、具体的な受信信号の確度の推定方法として、C/Noを用いる。これにより、上述の確度による測位方法の選択に、C/Noの情報が反映されるので、C/No単独による測位方法の選択を行わなくてもよい。
【発明の効果】
【0025】
この発明によれば、受信環境に応じて、単純な測位演算処理で高精度な測位結果が算出可能な状況であれば当該単純な測位演算処理を実行し、単純な測位演算処理で高精度な測位結果が算出不可能な状況であれば、状況に応じた測位演算処理により高精度な測位結果を算出することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の実施形態に係る測位方法を示すフローチャートである。
【図2】コード位相差に基づく観測擬似距離の変化量とドップラシフトの変化量とによる確度の検出を用いた場合の測位方法を示すフローチャートである。
【図3】C/Noによる確度の検出を用いた場合の測位方法を示すフローチャートである。
【図4】本発明の実施形態に係る測位装置の主要構成を示すブロック図である。
【図5】本発明の実施形態に係る移動端末の主要構成を示すブロック図である。
【発明を実施するための形態】
【0027】
本発明の実施形態に係る測位方法およびこれを実現する測位プログラムや測位装置について、図を参照して説明する。図1は、本実施形態の測位方法を示すフローチャートである。
【0028】
本実施形態の測位方法では、まず、各GNSS衛星からのGNSS測位信号(以下、単に「測位信号」と称する。)を捕捉、追尾する(S101)。
【0029】
次に、捕捉、追尾できている各測位信号(受信信号)のC/Noを算出する(S102)。各測位信号のC/Noは、後述するPunctualのコード相関結果(P相関結果)に基づいて算出される。
【0030】
次に、各測位信号の確度を推定する(S103)。確度の検出方法としては、例えば、次に示すようなRAIM技術を用いるとよい。RAIM技術とは、概略的には、使用可能な測位信号数(受信信号数)が6個以上の場合に、同時に受信した4個の測位信号の組合せ毎に測位演算を実行して、測位演算結果に大きな誤差が生じる組合せから、確度の低い測位信号を検出するものである。このようなRAIM技術を利用し、例えば次に示すような方法で確度の高い測位信号を検出する。
【0031】
(A)使用可能な全ての測位信号で擬似距離の推定算出を行う。次に、推定擬似距離と観測擬似距離とから観測残差を算出する。観測残差の二乗和を算出し、χ二乗検定が棄却されれば、すなわち、予め誤差が少ない場合に得られる誤差(通常誤差と称する。)よりも、誤差が大きければ、次の処理を実行する。
【0032】
各測位信号を1個ずつ排除して、それぞれに測位信号の組合せを設定する。組合せ毎で擬似距離の推定算出を実行し、残差二乗和を得る。そして、組合せ毎にχ二乗検定を行い、採択か棄却かを判定する。棄却となる組合せに含まれるが、採択となる組合せに含まれていない測位信号を、観測誤差が大きな測位信号、すなわち確度が低い測位信号として検出する。そして、この確度が低いと検出された測位信号以外の、捕捉、追尾されている測位信号を、確度の高い測位信号として検出する。
【0033】
(B)測位信号毎に、前回の測位結果から得られる推定位置と、前回の測位時に得られた速度情報と、前回と今回との時間間隔とから、今回の仮推定位置を算出する。そして、今回の観測擬似距離から得られる今回の測位位置が、仮推定位置を基準とする所定範囲内にあるかどうかを判断する。今回の測位位置が仮推定位置を基準とする所定範囲内にあれば、この測位位置に対応する測位信号を、観測誤差の小さい測位信号、すなわち確度の高い測位信号として、検出する。一方、この所定範囲内になければ、この測位位置に対応する測位信号を、観測誤差の大きな測位信号、すなわち確度の低い測位信号として検出する。
【0034】
次に、S103で取得した確度の高い測位信号の数が4個以上であれば(S104:Yes)、各確度の高い測位信号のC/Noを取得する。
【0035】
全ての確度の高い測位信号のC/Noが35dB以上であれば、すなわち確度の高い測位信号のC/Noにおける最小のC/Noが35dB以上であれば(S105:Yes)、これら確度の高い測位信号の擬似距離のみを用いる。すなわち、確度の低い測位信号を排除した上で、測位演算を実行する(S106→S107)。このような確度の低い測位信号を排除した測位演算が、本願発明の「第1の測位方式」に相当する。
【0036】
一方、確度の高い測位信号数が4個未満であるか(S104:No)、確度の高い測位信号数が4個以上であっても、当該確度の高い測位信号群の最小のC/Noが35dB未満であれば(S105:No)、確度に応じたパラメータ設定を行って、測位演算を実行する(S108→S107)。このような確度に応じたパラメータ設定を実行した測位演算が、本願発明の「第2の測位方式」に相当する。
【0037】
具体的に、第1、第2の測位方式の例を、次に示す。
(A)重み付けハッチフィルタを用いたキャリアスムージングへの適用
重み付けハッチフィルタでは、今回の観測擬似距離と、前回の推定擬似距離およびキャリア位相変化量の加算値と、を重み付け加算することで、今回の推定擬似距離を算出する。そして、この重み付け加算のための係数を第1の測位方式と第2の測位方式とにより、異ならせる。
まず、第1の測位方式、すなわち、測位演算から確度の低い測位信号を排除して、確度の高い測位信号のみを用いる場合には、従前に行った実験結果やシミュレーション結果に基づいて、推定擬似距離が安定して得られるような固定の重み付け係数を設定する。
【0038】
一方、第2の測位方式、すなわち、確度に応じたパラメータ設定を行う場合には、測位信号の確度に応じて重み付け係数を適応的に設定する。具体的には、確度の高い測位信号ほど、今回の観測擬似距離の重みが高くなるように設定し、確度の低い測位信号ほど、今回の観測擬似距離の重みが低くなるように設定する。
【0039】
以上のような重み付け係数の設定を行うことで、確度の高い測位信号が測位演算に対して十分な数(4個)以上であり、これら測位信号のC/Noが所定値(35dB)以上である場合には、固定の重み付け係数からなる重み付けハッチフィルタを用いることで、相対的に簡素且つ容易な演算で、高精度な測位結果を得ることができる。
【0040】
一方、確度の高い測位信号が測位演算に対して十分な数(4個)未満であったり、測位信号のC/Noが所定値(35dB)未満であったりする場合には、確度に応じて重み付け係数が適応する。これにより、相対的に測位演算は複雑になるものの、高精度な測位演算結果を得ることができる。
【0041】
(B)航跡フィルタを用いた推定測位演算への適用
以下では、航跡フィルタとしてカルマンフィルタを用いる例を示すが、誤差共分散行列によりフィルタの観測誤差のパラメータ設定を行える推定演算であればよい。
【0042】
航跡フィルタは次式で表すことができる。
【0043】
ρρ(k)=HH・xx(k)+ν(k) −(式1)
この航跡フィルタにおいて、ρρ(k)は演算タイミングkでの観測ベクトルであり、xx(k)は演算タイミングkでの状態ベクトルである。また、HHは方向余弦行列であり、ν(k)は演算タイミングkでの観測誤差である。観測誤差ν(k)は、誤差共分散行列RR(k)且つ零平均の多変数正規(ガウス)分布に従っている。したがって、観測誤差ν(k)は、ν(k)〜N(0,RR)で定義される。このような航跡フィルタにおける観測誤差ν(k)の誤差共分散行列RR(k)の構成要素を、第1の測位方式と第2の測位方式とにより異なる。
【0044】
まず、第1の測位方式、すなわち、測位演算から確度の低い測位信号を排除して、確度の高い測位信号のみを用いる場合には、従前に行った実験結果やシミュレーション結果に基づいて、推定擬似距離が安定して得られるような固定値に、上述の誤差共分散行列RR(k)の各構成要素を設定する。
【0045】
一方、第2の測位方式、すなわち、確度に応じたパラメータ設定を行う場合、測位信号の確度に応じて誤差共分散行列RR(k)の各構成要素を適応的に設定する。具体的には、確度の高い測位信号ほど、誤差共分散行列RR(k)の各構成要素である誤差分散が小さくなるように設定し、確度の低い測位信号ほど、誤差共分散行列RR(k)の各構成要素である誤差分散が大きくなるように設定する。
【0046】
以上のような誤差分散行列の設定を行うことで、確度の高い測位信号が測位演算に対して十分な数(4個)以上であり、これら測位信号のC/Noが所定値(35dB)以上である場合には、各構成要素(誤差分散)が固定値に設定された誤差共分散行列RR(k)からなる航跡フィルタを用いることで、相対的に簡素且つ容易な演算で、高精度な測位結果を得ることができる。
【0047】
一方、確度の高い測位信号が測位演算に対して十分な数(4個)未満であったり、測位信号のC/Noが所定値(35dB)未満であったりする場合には、確度に応じて誤差共分散行列RR(k)の各行列要素(誤差分散)が適応する。これにより、相対的に測位演算は複雑になるものの、高精度な測位演算結果を得ることができる。
【0048】
なお、上述の説明では、観測擬似距離と推定擬似距離との誤差や観測値と推定値との差に基づく観測誤差から確度を検出する例を示した。しかしながら、コード位相差に基づく観測擬似距離の変化量とドップラシフトの変化量とから確度を検出することもできる。また、C/Noから確度を検出することもできる。
【0049】
図2は、コード位相差に基づく観測擬似距離の変化量とドップラシフトの変化量とによる確度の検出を用いた場合の測位方法を示すフローチャートである。なお、本フローは、確度の検出にコード位相差に基づく観測擬似距離の変化量とドップラシフトの変化量を用いている点を除き、上述の図1に示した測位方法のフローチャートと同じである。
【0050】
この方法では、受信信号のC/Noの算出(S202)後に、コード位相差による観測擬似距離を複数エポックに亘り算出し、観測擬似距離の変化量を順次取得する(S203)。同時に、ドップラシフトの変化量を順次取得する(S204)。
【0051】
次に、観測擬似距離の変化量とドップラシフトの変化量との差分値から、確度を検出する(S205)。具体的には、観測擬似距離の変化量とドップラシフトの変化量との差分値が大きい測位信号は、確度が低いと検出する。一方、観測擬似距離の変化量とドップラシフトの変化量との差分値が小さい測位信号は、確度が高いと検出する。
【0052】
以下、確度の決定後のフローは、上述の図1のフローと同じである。このような方法であっても、確度に応じた最適な測位演算を行うことができる。
【0053】
一方、C/Noによる確度の検出方法を用いた場合は、次のフローにより測位演算が実行される。図3は、C/Noによる確度の検出を用いた場合の測位方法を示すフローチャートである。
【0054】
この方法では、各受信信号のC/Noを算出(S302)後に、C/Noに基づいて確度を検出する(S303)。具体的には、例えばC/Noが35dB以上であれば、当該測位信号は確度が高いものと判断する。一方、C/Noが35dB未満であれば、当該測位信号は確度が低いものと判断する。このようなC/Noによる確度の検出を行うと、図1に示したようなC/Noによる測位方法の選択が、確度による測位方法の選択に含まれる。これにより、さらに簡素なフローで測位方法を決定することができる。
【0055】
なお、これらの確度検出方法は、一例であり、他の方法を用いてもよい。これらを適宜組み合わせて、確度を検出することもできる。
【0056】
また、上述の方法では、確度を検出して測位方法を選択する例を示しているが、例えば、C/Noに応じて重み付け係数を設定する方法を用いてもよい。
【0057】
具体的には、C/Noが50dBの場合に重みを「1」として、C/Noの低下とともに重みを低くするようにしてもよい。この場合、重みは指数的に低下させるとよい。
【0058】
また、具体的には、C/Noの変化量を基準に重みを設定してもよい。この場合、C/Noの変化量が「0」ならば重みを「1」とし、変化量が大きくなるほど、重みを低くするようにしていもよい。この場合も、重みを指数的に低下させるとよい。
【0059】
さらには、これらのC/NoやC/Noの変化量に依存する重みを用いて、これらの平均値を測位演算の重みに設定してもよい。
【0060】
そして、以上のような方法を用いれば、測位信号毎の誤差の大小が、そのまま重みに反映されるので、より正確な測位演算が可能になる。
【0061】
次に、上述の測位方法を実現する測位装置の構成について、図4を参照して説明する。図4は本発明の実施形態に係る測位装置の主要構成を示すブロック図である。
【0062】
本実施形態の測位装置1は、アンテナ10、RF処理部11、キャリア相関部12、コード相関部13、ドップラシフト測定部14、C/No測定部15、擬似距離算出部16、および測位演算部17を備える。なお、本実施形態では、キャリア相関部13およびコード相関部14を個別に構成する例を示しているが、所謂コード相関結果をキャリア相関処理に利用し、キャリア相関結果をコード相関処理に利用する、所謂コード−キャリア統合追尾ループを用いてもよい。
【0063】
アンテナ10は、各測位衛星からの測位信号を受信し、RF処理部11へ出力する。RF処理部11は、測位信号を中間周波数にダウンコンバートしてIF信号を生成し、キャリア相関部12およびコード相関部13へ出力する。
【0064】
キャリア相関部12は、測位信号の周波数に基づいて予め設定されたキャリア周波数信号とIF信号とをキャリア相関処理して、キャリア相関結果をΔレンジ測定部14へ出力する。
【0065】
コード相関部13は、IF信号をキャリア周波数信号でベースバンド変換したベースバンド信号とレプリカ信号とをコード相関処理する。この際、コード相関部13は、各測位衛星からの測位信号毎にコード相関処理を行う。
【0066】
また、コード相関部13は、測位信号毎に、P(Punctual)相関部、E(Early)相関部、およびL(Late)相関部を備える。コード相関部14は、E(Early)相関部からのE相関結果とL(Late)相関部からのL相関結果に基づいて、測位信号毎にコード追尾処理を行うとともに、各相関処理タイミングでのE相関結果とL相関結果との差分値からなるE−L相関値を所定時間積算し、擬似距離算出部16へ出力する。また、コード相関部13は、測位信号毎にP相関結果をC/No測定部15へ出力する。
【0067】
ドップラシフト測定部14は、キャリア相関結果からドップラ周波数を算出し、当該ドップラ周波数の所定時間長(例えば1秒)分を積分することで、観測ドップラシフトΔρm(k)を算出する。
【0068】
C/No測定部15は、P相関結果を所定時間長(例えば1秒間)記憶し、これら記憶した時間軸上に列ぶ複数のPunctualの位相差データをFFT処理等の周波数変換処理し、時間軸上のスペクトルと周波数軸上のスペクトルとからなる二次元の相関スペクトルからC/Noを測定する。なお、ここでは、二次元の相関スペクトルによる相関結果からC/Noを測定しているが、他の方法を用いてもよい。
【0069】
擬似距離算出部16は、コード相関部13からのE−L相関結果に基づいて、既知の方法から観測擬似距離ρm(k)を算出する。
【0070】
測位演算部17は、上述のようなRAIM技術を利用し、取得した測位信号毎の観測擬似距離ρm(k)や観測ドップラシフトΔρm(k)等を用いて、固定のパラメータ設定で仮測位を行い、仮測位結果に基づいて、確度の低い測位信号および確度の高い測位信号を検出する。なお、確度の検出にドップラシフトを用いる必要がない場合には、ドップラシフト測定部14を省略することも可能である。また、測位演算部17は、上述のように、C/Noのみから確度を算出したり、観測擬似距離とドップラシフトとから確度を算出することもできる。
【0071】
測位演算部17は、確度の高い測位信号が測位演算に対して十分な数(4個)以上であり、これら測位信号のC/Noが所定値(35dB)以上である場合には、固定パラメータを用いた相対的に簡素且つ容易な測位演算を行う。一方、測位演算部17は、確度の高い測位信号が測位演算に対して十分な数(4個)未満であったり、測位信号のC/Noが所定値(35dB)未満であったりする場合には、確度に応じてパラメータを設定する相対的に複雑な測位演算を行う。これにより、受信環境に応じて測位演算の負荷を調整しながら、高精度な測位演算結果を得ることができる。
【0072】
なお、上述の説明では、機能ブロックによる構成で、上述の測位方法を実現する例を示したが、上述の測位方法をプログラム化して、メモリに記憶しておき、CPUで当該プログラムを処理演算して、測位演算処理を実行するようにしてもよい。
【0073】
そして、このような測位装置1や測位演算機能は、図5に示すような移動端末100に利用される。図5は、本実施形態の測位装置1を備えた移動端末100の主要構成を示すブロック図である。
【0074】
図5に示すような移動端末100は、例えば携帯電話機、カーナビゲーション装置、PND、カメラ、時計等であり、アンテナ10、測位装置1、アプリケーション処理部120を備える。
【0075】
アンテナ10は図4に示したアンテナと同じであり、図5に示す測位装置1は、上述の図4の測位装置1や測位演算機能部であり、自装置の位置や相対速度等を推定算出して、アプリケーション処理部120へ出力する。アプリケーション処理部120は、得られた測位結果に基づいて、自装置位置や自装置速度を表示したり、ナビゲーション等に利用するための処理を実行する。このような構成において、上述のように受信環境に応じて適する処理負荷で高精度な測位結果を得られることで、受信環境に応じた最適な処理演算で高精度な位置表示やナビゲーション等を実現することができる。
【符号の説明】
【0076】
1−測位装置、10−アンテナ、11−RF処理部、12−キャリア相関部、13−コード相関部、14−ドップラシフト測定部、15−C/No測定部、16−擬似距離算出部、17−測位演算部、100−移動端末、120−アプリケーション処理部
【特許請求の範囲】
【請求項1】
GNSS測位信号の受信信号に基づいて該受信信号の確度を推定する確度推定工程と、
前記確度が閾値より大きい受信信号である高確度信号の数を算出する高確度信号数算出工程と、
前記受信信号を用いて測位演算を実行する測位演算工程と、を有し、
前記測位演算工程は、前記高確度信号の数に基づく測位方式で測位演算を実行する、ことを特徴とする測位方法。
【請求項2】
請求項1に記載の測位方法であって、
前記測位演算工程は、
前記高確度信号の数が所定数以上のとき、該高確度信号を用いた第1方式で測位演算を実行し、
前記高確度信号の数が所定数未満のとき、前記受信信号を用いた第2方式で測位演算を実行する、ことを特徴とする測位方法。
【請求項3】
請求項2に記載の測位方法であって、
前記測位演算工程は、
前記高確度信号の数が所定数以上のとき、該高確度信号以外の受信信号を排除した第1方式で測位演算を実行し、
前記高確度信号の数が所定数未満のとき、前記受信信号の確度に応じた重み付けをした第2方式で測位演算を実行する、ことを特徴とする測位方法。
【請求項4】
請求項1に記載の測位方法であって、
前記受信信号のC/Noを測定するC/No測定工程、をさらに有し、
前記測位演算工程は、
前記高確度信号の数が所定数以上、かつ該高確度信号の前記C/Noの最低値が所定値以上のとき、該高確度信号を用いた第1方式で測位演算を実行し、
前記高確度信号の数が所定数未満、または該高確度信号のC/Noの最低値が所定値未満のとき、前記受信信号を用いた第2方式で測位演算を実行する、ことを特徴とする測位方法。
【請求項5】
請求項4に記載の測位方法であって、
前記測位演算工程は、
前記高確度信号の数が所定数以上、かつ該高確度信号の前記C/Noの最低値が所定値以上のとき、該高確度信号以外の受信信号を排除した第1方式で測位演算を実行し、
前記高確度信号の数が所定数未満、または該高確度信号のC/Noの最低値が所定値未満のとき、前記受信信号の確度に応じた重み付けをした第2方式で測位演算を実行する、ことを特徴とする測位方法。
【請求項6】
請求項1から請求項5のいずれかに記載の測位方法であって、
前記確度推定工程は、受信機自律型完全性監視技術により前記受信信号の確度を推定する、ことを特徴する測位方法。
【請求項7】
請求項1から請求項5のいずれかに記載の測位方法であって、
前記受信信号のコード位相差に基づいて擬似距離を算出する擬似距離算出工程と、
前記受信信号のドップラシフトを測定するドップラシフト測定工程と、をさらに備え、
前記確度推定工程は、所定時間の前記擬似距離の変化率、および前記ドップラシフトに基づいて前記受信信号の確度を推定する、ことを特徴する測位方法。
【請求項8】
請求項1から請求項3のいずれかに記載の測位方法であって、
前記受信信号のC/Noを測定するC/No測定工程、をさらに有し、
前記確度推定工程は、前記受信信号のC/Noに基づいて該受信信号の確度を推定する、ことを特徴する測位方法。
【請求項9】
GNSS測位信号の受信信号に基づいて該受信信号の確度を推定する確度推定処理と、
前記確度が閾値より大きい受信信号である高確度信号の数を算出する高確度信号数算出処理と、
前記受信信号を用いて測位演算を実行する測位演算処理と、を有し、
前記測位演算処理では、前記高確度信号の数に基づく測位方式で測位演算を実行する、ことを特徴とする測位プログラム。
【請求項10】
請求項9に記載の測位プログラムであって、
前記測位演算処理では、
前記高確度信号の数が所定数以上のとき、該高確度信号を用いた第1方式で測位演算を実行し、
前記高確度信号の数が所定数未満のとき、前記受信信号を用いた第2方式で測位演算を実行する、ことを特徴とする測位プログラム。
【請求項11】
GNSS測位信号の受信信号に基づいて該受信信号の確度を推定する確度推定部と、
前記確度が閾値より大きい受信信号である高確度信号の数を算出する高確度信号数算出部と、
前記受信信号を用いて測位演算を実行する測位演算部と、を備え、
前記測位演算部は、前記高確度信号の数に基づく測位方式で測位演算を実行する、ことを特徴とするGNSS受信装置。
【請求項12】
請求項11に記載のGNSS受信装置であって、
前記測位演算部は、
前記高確度信号の数が所定数以上のとき、該高確度信号を用いた第1方式で測位演算を実行し、
前記高確度信号の数が所定数未満のとき、前記受信信号を用いた第2方式で測位演算を実行する、ことを特徴とするGNSS受信装置。
【請求項13】
請求項11もしくは請求項12に記載のGNSS受信装置を備えるとともに、
前記測位演算部で算出された測位結果に基づいて、所定のアプリケーション処理を実行するアプリケーション処理部を、備える移動端末。
【請求項1】
GNSS測位信号の受信信号に基づいて該受信信号の確度を推定する確度推定工程と、
前記確度が閾値より大きい受信信号である高確度信号の数を算出する高確度信号数算出工程と、
前記受信信号を用いて測位演算を実行する測位演算工程と、を有し、
前記測位演算工程は、前記高確度信号の数に基づく測位方式で測位演算を実行する、ことを特徴とする測位方法。
【請求項2】
請求項1に記載の測位方法であって、
前記測位演算工程は、
前記高確度信号の数が所定数以上のとき、該高確度信号を用いた第1方式で測位演算を実行し、
前記高確度信号の数が所定数未満のとき、前記受信信号を用いた第2方式で測位演算を実行する、ことを特徴とする測位方法。
【請求項3】
請求項2に記載の測位方法であって、
前記測位演算工程は、
前記高確度信号の数が所定数以上のとき、該高確度信号以外の受信信号を排除した第1方式で測位演算を実行し、
前記高確度信号の数が所定数未満のとき、前記受信信号の確度に応じた重み付けをした第2方式で測位演算を実行する、ことを特徴とする測位方法。
【請求項4】
請求項1に記載の測位方法であって、
前記受信信号のC/Noを測定するC/No測定工程、をさらに有し、
前記測位演算工程は、
前記高確度信号の数が所定数以上、かつ該高確度信号の前記C/Noの最低値が所定値以上のとき、該高確度信号を用いた第1方式で測位演算を実行し、
前記高確度信号の数が所定数未満、または該高確度信号のC/Noの最低値が所定値未満のとき、前記受信信号を用いた第2方式で測位演算を実行する、ことを特徴とする測位方法。
【請求項5】
請求項4に記載の測位方法であって、
前記測位演算工程は、
前記高確度信号の数が所定数以上、かつ該高確度信号の前記C/Noの最低値が所定値以上のとき、該高確度信号以外の受信信号を排除した第1方式で測位演算を実行し、
前記高確度信号の数が所定数未満、または該高確度信号のC/Noの最低値が所定値未満のとき、前記受信信号の確度に応じた重み付けをした第2方式で測位演算を実行する、ことを特徴とする測位方法。
【請求項6】
請求項1から請求項5のいずれかに記載の測位方法であって、
前記確度推定工程は、受信機自律型完全性監視技術により前記受信信号の確度を推定する、ことを特徴する測位方法。
【請求項7】
請求項1から請求項5のいずれかに記載の測位方法であって、
前記受信信号のコード位相差に基づいて擬似距離を算出する擬似距離算出工程と、
前記受信信号のドップラシフトを測定するドップラシフト測定工程と、をさらに備え、
前記確度推定工程は、所定時間の前記擬似距離の変化率、および前記ドップラシフトに基づいて前記受信信号の確度を推定する、ことを特徴する測位方法。
【請求項8】
請求項1から請求項3のいずれかに記載の測位方法であって、
前記受信信号のC/Noを測定するC/No測定工程、をさらに有し、
前記確度推定工程は、前記受信信号のC/Noに基づいて該受信信号の確度を推定する、ことを特徴する測位方法。
【請求項9】
GNSS測位信号の受信信号に基づいて該受信信号の確度を推定する確度推定処理と、
前記確度が閾値より大きい受信信号である高確度信号の数を算出する高確度信号数算出処理と、
前記受信信号を用いて測位演算を実行する測位演算処理と、を有し、
前記測位演算処理では、前記高確度信号の数に基づく測位方式で測位演算を実行する、ことを特徴とする測位プログラム。
【請求項10】
請求項9に記載の測位プログラムであって、
前記測位演算処理では、
前記高確度信号の数が所定数以上のとき、該高確度信号を用いた第1方式で測位演算を実行し、
前記高確度信号の数が所定数未満のとき、前記受信信号を用いた第2方式で測位演算を実行する、ことを特徴とする測位プログラム。
【請求項11】
GNSS測位信号の受信信号に基づいて該受信信号の確度を推定する確度推定部と、
前記確度が閾値より大きい受信信号である高確度信号の数を算出する高確度信号数算出部と、
前記受信信号を用いて測位演算を実行する測位演算部と、を備え、
前記測位演算部は、前記高確度信号の数に基づく測位方式で測位演算を実行する、ことを特徴とするGNSS受信装置。
【請求項12】
請求項11に記載のGNSS受信装置であって、
前記測位演算部は、
前記高確度信号の数が所定数以上のとき、該高確度信号を用いた第1方式で測位演算を実行し、
前記高確度信号の数が所定数未満のとき、前記受信信号を用いた第2方式で測位演算を実行する、ことを特徴とするGNSS受信装置。
【請求項13】
請求項11もしくは請求項12に記載のGNSS受信装置を備えるとともに、
前記測位演算部で算出された測位結果に基づいて、所定のアプリケーション処理を実行するアプリケーション処理部を、備える移動端末。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−179894(P2011−179894A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−42852(P2010−42852)
【出願日】平成22年2月26日(2010.2.26)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年2月26日(2010.2.26)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
[ Back to top ]