
測位方法およびシステム
【課題】リーダをタグに近接させる動作が不要であり、分散配置される多数の無線タグを他のシステムと未接続の自律状態とできる測位方法およびシステムを提供する。
【解決手段】携帯無線端末2において、測位要求部21は、ユーザUによる測位指示のキー入力操作などを検知して測位要求を送信する。応答受信部22は、測位要求を受信した各無線タグ1から返信される測位応答を受信する。応答時間計測部23は、例えば測位要求の送信時刻から各測位応答の受信時刻までの経過時間を応答時間ΔTとして計測する。位置情報抽出部24は、各測位応答に記述されている各無線タグ1の設置位置Pを抽出する。測位部25は、各無線タグ1の応答時間ΔTおよび各無線タグ1の設置位置Pに基づいて自端末2の現在位置P0を算出する。出力部26は、前記測位の結果を表示出力または音声出力する。
【解決手段】携帯無線端末2において、測位要求部21は、ユーザUによる測位指示のキー入力操作などを検知して測位要求を送信する。応答受信部22は、測位要求を受信した各無線タグ1から返信される測位応答を受信する。応答時間計測部23は、例えば測位要求の送信時刻から各測位応答の受信時刻までの経過時間を応答時間ΔTとして計測する。位置情報抽出部24は、各測位応答に記述されている各無線タグ1の設置位置Pを抽出する。測位部25は、各無線タグ1の応答時間ΔTおよび各無線タグ1の設置位置Pに基づいて自端末2の現在位置P0を算出する。出力部26は、前記測位の結果を表示出力または音声出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、現在位置を測位する測位方法および装置に係り、特に、多数の無線式送受信端末が分散配置され、測位対象の移動端末が複数の無線式送受信端末と通信して現在位置を推定する測位方法およびシステムに関する。
【背景技術】
【0002】
走行中の車両あるいは歩行中の人の現在位置を測位するシステムとして、少なくとも3機のGPS衛星から送信されるGPS信号を受信し、各衛星の位置およびGPS信号の受信時刻を用いた三角交差法により現在位置を算出するGPSシステムが広く普及している。しかしながら、GPSシステムではGPS信号を受信できない屋内などでは測位が困難である。
【0003】
このような技術課題に対して、特許文献1,2には、多数のパッシブタイプのRFIDタグを分散配置し、被験者が携帯リーダを最寄りの一つのRFIDタグに近接させてタグIDを取り込み、サーバに問い合わせることで現在位置を推定する技術が開示されている。特許文献1では、視覚障害者が持つ杖の先端にリーダが装着され、特定の一つのRFIDタグを読み込むことで現在位置が推定される。特許文献2では、車両の通過ポイントに設置されたRFIDタグを車両底面に装着されたリーダで読み込むことで走行位置が推定される。
【0004】
また、特許文献3には、測定対象エリアの異なる所定位置に複数個のリーダを設置し、エリア内を移動する測位対象のRFIDタグとの間で通信を行い、リーダが受信したID情報およびその受信電波強度を、LANなどを介して測位処理部に送り、測位処理部で測位対象の現在位置を三角測量により計算する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−165825号公報
【特許文献2】特開2007−57419号公報
【特許文献3】特開2005−274364号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1,2に開示された従来技術では、分散配置された多数のRFIDタグの一つにリーダを近接させなければならないので、現在位置を推定できる範囲が限定されてしまい、その分解能もRFIDタグの設置数に依存してしまう。したがって、広範囲かつ高い分解能で現在位置を推定できるようにするためには、極めて多数のRFIDタグを配置しなければならないという技術課題があった。
【0007】
特許文献3に開示された従来技術では、リーダをRFIDタグに近接させる動作は不要になるものの、RFIDタグが測位対象に搭載されているので、分散配置された全てのリーダと測位処理部とを通信回線やネットワークで接続して受信データを収集しなければならなかった。
【0008】
なお、上記のRFIDタグとは別に、ZigBee(登録商標)、UWB(Ultra Wide Band)あるいはBluetooth(登録商標)などの近距離無線通信技術が実装された無線タグを用いて測位するシステムも提案されているが、これらの無線タグを分散配置する測位システムも上記と同様の技術課題を抱えている。
【0009】
本発明の目的は、上記した従来技術の課題を解決し、リーダをRFIDタグや送受信端末に近接させる動作が不要でありながら広範囲かつ高い分解能で現在位置を推定でき、かつ分散配置される多数の応答端末を他のシステムやネットワークと未接続の自律状態で使用できる測位方法およびシステムを提供することにある。
【課題を解決するための手段】
【0010】
上記の目的を達成するために、本発明は、多数の無線タグが分散配置され、測位対象の移動端末が複数の無線タグと通信して現在位置を推定する測位システムにおいて、以下のような手段を講じた点に特徴がある。
【0011】
(1)移動端末が、測位要求を送信する手段と、前記測位要求に応答して各無線タグから返信される測位応答を受信する手段と、受信した測位応答に基づいて各無線タグの設置位置を取得する手段と、受信した測位応答に基づいて各無線タグまでの距離を取得する手段と、各無線タグまでの距離および各無線タグの設置位置に基づいて現在位置を推定する手段とを具備したことを特徴とする。
【0012】
(2)各無線タグのIDとその設置位置との対応関係が記述された変換テーブルを受信する手段と、各無線タグから受信した測位応答に記述されたIDを抽出する手段と、抽出した各IDに基づいて変換テーブルから各無線タグの設置位置を取得する手段とを含むことを特徴とする。
【0013】
(3)無線タグが所定の近距離無線通信規格に対応したZigBee(登録商標)タグ、UWBタグおよびBluetooth(登録商標)タグのいずれかであって、移動端末は、測位要求を送信してから測位応答が受信されるまでの応答時間に基づいて距離を取得することを特徴とする請求項4に記載の測位システム。
【0014】
(4)無線タグがRFIDタグであって、移動端末は、受信電波強度と距離とを対応付ける受信電波強度テーブルを具備し、受信した測位応答の受信電波強度に基づいて前記受信電波強度テーブルから距離を取得することを特徴とする。
【0015】
(5)移動端末の現在位置を推定する測位サーバを更に具備し、移動端末は、現在位置の推定に必要な情報を測位サーバへ送信して現在位置の推定結果を受信することを特徴とする。
【0016】
(6)各無線タグが、自身のIDを記憶する手段と、
【0017】
移動端末からの測位要求に応答して、前記IDの記述された測位応答を返信する手段とを具備し、さらに、各無線タグのIDとその設置位置との対応関係が記述された変換テーブルを移動端末へ送信する無線タグを具備したことを特徴とする。
【発明の効果】
【0018】
本発明によれば、以下のような効果が達成される。
【0019】
(1)リーダをタグに近接させる必要がないので、従来技術に較べて少数の無線タグを分散配置するだけで、現在位置を広範囲かつ高い分解能で推定できるのみならず、分散配置される無線タグを他のシステムやネットワーク等と接続する必要がないので、システムの構築が極めて容易になる。
【0020】
(2)各無線タグのIDとその設置位置との対応関係が記述された変換テーブルを設けたので、無線タグを移動あるいは交換する場合でも、その後の位置登録が容易になる。
【0021】
(3)近距離無線通信規格に対応した無線タグを分散配置し、測位要求に対して返信される測位応答の応答時間に基づいて距離を算出するようにしたので、常に正確な測位が可能になる。
【0022】
(4)RFIDタグを分散配置し、受信電波強度に基づいて距離を算出するようにしたので、簡単な構成で測位が可能になる。
【0023】
(5)測位サーバを別途に設けて現在位置の算出を依頼するようにしたので、移動端末の処理能力の低い場合でも正確な測位が可能になる。
【0024】
(6)移動端末が、各無線タグのIDとその設置位置との対応関係が記述された変換テーブルをその都度受信して一時記憶するようにしたので、多数の変換テーブルを記憶しておくための大きな記憶容量が不要になる。
【図面の簡単な説明】
【0025】
【図1】本発明の第1実施形態に係る測位システムのネットワーク構成を示した図である。
【図2】第1実施形態における携帯無線端末の構成を示したブロック図である。
【図3】第1、2実施形態における無線タグの構成を示したブロック図である。
【図4】第1実施形態の動作を示したフローチャートである。
【図5】現在位置の算出方法を説明するための図である。
【図6】本発明の第2実施形態に係る測位システムのネットワーク構成を示した図である。
【図7】第2実施形態における携帯無線端末の構成を示したブロック図である。
【図8】第2実施形態における測位サーバの構成を示したブロック図である。
【図9】第2実施形態の動作を示したフローチャートである。
【図10】第3実施形態における携帯無線端末の構成を示したブロック図である。
【図11】第4実施形態における携帯無線端末の構成を示したブロック図である。
【図12】第4実施形態における測位サーバ構成を示したブロック図である。
【図13】第5実施形態における携帯無線端末の構成を示したブロック図である。
【図14】第5実施形態における無線タグの構成を示したブロック図である。
【図15】第5実施形態の動作を示したフローチャートである。
【図16】RSSIテーブルの一例を示した図である。
【図17】現在位置の算出方法を説明するための図である。
【図18】第6実施形態における携帯無線端末の構成を示したブロック図である。
【図19】第6実施形態における測位サーバ構成を示したブロック図である。
【図20】第6実施形態の動作を示したフローチャートである。
【発明を実施するための形態】
【0026】
以下、図面を参照して本発明の最良の実施形態について詳細に説明する。ここでは、測位対象となる移動端末が携帯無線端末である場合を例にして説明する。
[第1実施形態]
【0027】
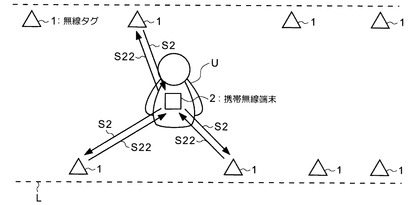
図1は、本発明の第1実施形態に係る測位システムのネットワーク構成を示したブロック図であり、経路L上またはその周囲に分散位置されて自律動作する多数の無線タグ1と、ユーザUからの測位指示を検知して複数の無線タグ1と通信し、自端末の現在位置を測位する携帯無線端末2とを主要な構成としている。ここでは、前記無線タグ1としてUWB(Ultra Wide Band)タグを用いる場合を例にして説明するが、ZigBee(登録商標)タグやBluetooth(登録商標)タグなど、他の近距離無線通信の規格に対応した無線タグを用いる場合も同等に適用できる。
【0028】
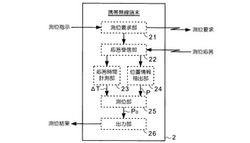
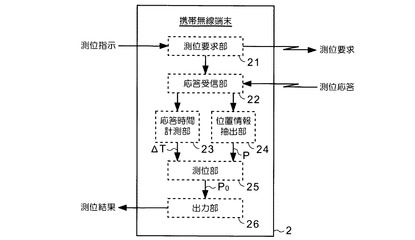
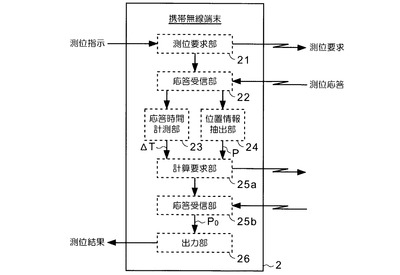
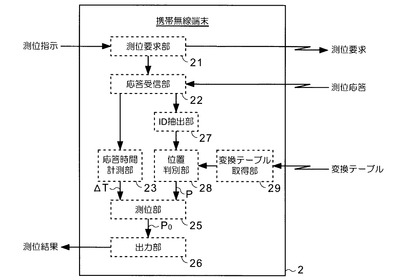
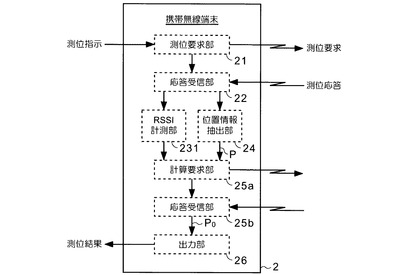
図2は、前記携帯無線端末2の主要部の構成を示したブロック図であり、ここでは、本発明の説明に不要な構成は図示が省略されている。
【0029】
測位要求部21は、ユーザUによる測位指示のキー入力操作などを検知して測位要求を送信する。応答受信部22は、前記測位要求を受信したUWBタグ1から返信される測位応答を受信する。応答時間計測部23は、例えば測位要求の送信時刻から測位応答の受信時刻までの経過時間を応答時間ΔTとして計測する。位置情報抽出部24は、各測位応答に記述されている各UWBタグ1の設置位置Pを抽出する。測位部25は、各UWBタグ1の応答時間ΔTおよび各UWBタグ1の設置位置Pに基づいて自端末2の現在位置P0を算出する。出力部26は、前記測位の結果を表示出力または音声出力する。
【0030】
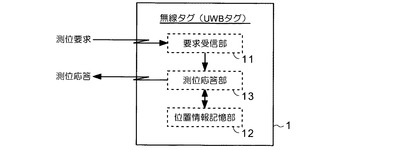
図3は、前記UWBタグ1の主要部の構成を示したブロック図であり、ここでも、本発明の説明に不要な構成は図示が省略されている。
【0031】
要求受信部11は、前記携帯無線端末2から送信された測位要求を受信する。位置情報記憶部12には自身の現在位置(設置位置)が記憶されている。測位応答部13は、測位要求が受信されると、前記設置位置の記述された測位応答を携帯無線端末2へ返信する。
【0032】
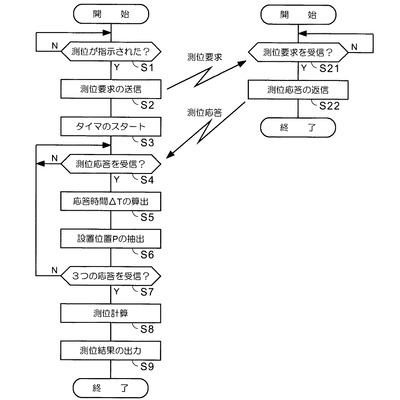
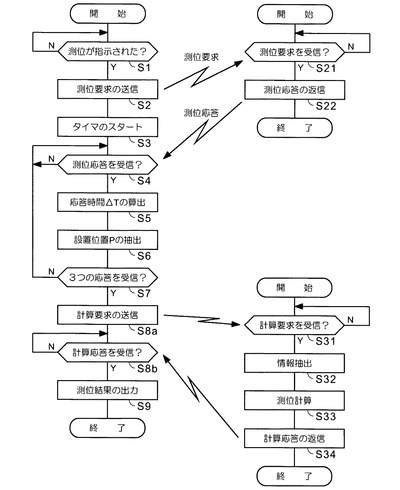
図4は、本実施形態の動作を示したフローチャートである。携帯無線端末2では、ステップS1でユーザUによる測位指示が検知されるとステップS2へ進み、携帯無線端末2に固有の端末IDsの記述された測位要求が、前記測位要求部21からブロードキャストで送信される。ステップS3では、応答時間を計測するタイマが計時を開始する。
【0033】
各UWBタグ1では、ステップS21で前記測位要求が要求受信部11により受信されるとステップS22へ進む。ステップS22では、前記位置情報記憶部12に記憶されている自身の設置位置および前記携帯無線端末2の端末IDsの記述された測位応答が前記測位応答部13により返信される。
【0034】
携帯無線端末2では、ステップS4で自端末宛の測位応答が前記応答受信部22により受信されるとステップS5へ進む。ステップS5では、前記測位要求の送信時刻から測位応答の受信時刻までの経過時間が、応答時間ΔTとして前記応答時間計測部23により計測される。ステップS6では、前記測位応答に記述されているUWBタグ1の設置位置Pが抽出される。ステップS7では、少なくとも3つのUWBタグ1(1a,1b,1c)から測位応答を受信できたか否かが判定される。受信できていなければステップS4へ戻って上記の各処理が繰り返される。
【0035】
少なくとも3つのUWBタグ1a,1b,1cに関して、その設置位置P1,P2,P3および応答時間ΔT1,T2,T3の取得が完了するとステップS8へ進み、これらの情報に基づいて携帯無線端末2の現在位置P0が算出される。ステップS9では、前記現在位置P0が表示出力あるいは音声出力されてユーザUに告知される。
【0036】
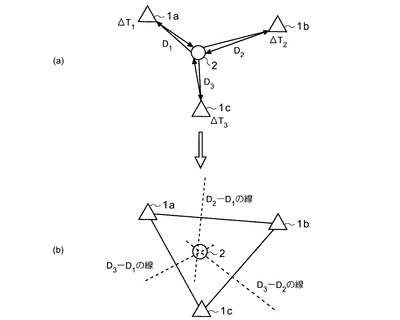
図5は、前記ステップS8における現在位置P0の算出方法を示した図である。始めに、同図(a)に示したように、3つのUWBタグ1a,1b,1cの応答時間ΔT1,T2,T3が次式(1)−(3)に適用されて各UWBタグ1a,1b,1cと携帯無線端末2との距離D1,D2,D3の差分が算出される。なお、符号αは換算計数である。
D1−D2=α・(ΔT1−ΔT2)/2 … (1)
D2−D3=α・(ΔT2−ΔT3)/2 … (2)
D3−D1=α・(ΔT3−ΔT1)/2 … (3)
【0037】
次いで、同図(b)に示したように、各UWBタグ1a,1b,1cからの距離の差が前記各差分と等しくなる3つの線分が求められ、その交点が算出されて携帯無線端末2の現在位置P0とされる。
[第2実施形態]
【0038】
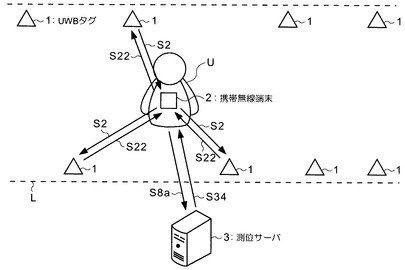
図6は、本発明の第2実施形態に係る測位システムのネットワーク構成を示したブロック図であり、経路L上またはその周囲に分散位置されて自律動作する多数のUWBタグ1と、複数のUWBタグ1と通信して測位に必要な情報を取得する携帯無線端末2と、これらの情報を携帯無線端末2から受信して当該携帯無線端末2の現在位置を計算し、計算結果を返信する測位サーバ3とを主要な構成としている。
【0039】
図7は、前記携帯無線端末2の主要部の構成を示したブロック図であり、前記と同一の符号は同一または同等部分を表しているので、その説明は省略する。
【0040】
計算要求部25aは、少なくとも3つのUWBタグ1a,1b,1cに関して、前記応答時間計測部23で計測された応答時間ΔT1,T2,T3、および前記位置情報抽出部24で抽出された各UWBタグ1の設置位置P1,P2,P3の記述された計算要求を測位サーバ3へ送信する。応答受信部25bは、前記測位サーバ3から返信される計算応答を受信して携帯無線端末2の現在位置P0を抽出する。なお、各UWBタグ1の構成は第1実施形態と同一または同等なので、その説明は省略する。
【0041】
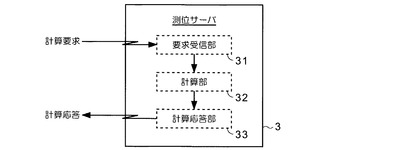
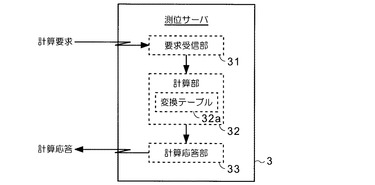
図8は、前記測位サーバ3の主要部の構成を示したブロック図であり、ここでは、本発明の説明に不要な構成は図示が省略されている。
【0042】
要求受信部31は、携帯無線端末2から送信される計算要求を受信する。計算部32は、受信した計算要求から各UWBタグ1a,1b,1cの応答時間ΔT1,ΔT2,ΔT3および設置位置P1,P2,P3を抽出し、前記図5に関して説明した手法と同一または同等の手法で携帯無線端末2の現在位置P0を算出する。計算応答部33は、この計算結果P0の記述された計算応答を携帯無線端末2へ返信する。
【0043】
図9は、本実施形態の動作を示したフローチャートであり、前記と同一の符号を付したステップでは前記と同一または同等の処理が実行される。
【0044】
携帯無線端末2では、ステップS7において、少なくとも3つのUWBタグ1a,1b,1cの設置位置P1,P2,P3および応答時間ΔT1,ΔT2,ΔT3の取得が完了したと判定されるとステップS8aへ進み、これらの情報の記述された計算要求メッセージが生成されて計算要求部25aから測位サーバ3へ送信される。
【0045】
測位サーバ3では、ステップS31で前記計算要求が要求受信部31で受信されるとステップS32へ進む。ステップS32では、前記計算部33により計算要求から3つのUWBタグ1a,1b,1cの設置位置P1,P2,P3および応答時間ΔT1,ΔT2,ΔT3が抽出され、ステップS33では、これらの情報に基づいて携帯無線端末2の現在位置P0が計算される。ステップS34では、この計算結果の記述された計算応答が計算応答部33から携帯無線端末2へ返信される。
【0046】
携帯無線端末2では、ステップS8bで応答受信部25bにより前記計算応答が受信されるとステップS9へ進む。ステップS9では、計算応答に記述されている現在位置P0が抽出されて表示出力あるいは音声出力される。
[第3実施形態]
【0047】
図10は、本発明の第3実施形態に係る携帯無線端末2の構成を示したブロック図であり、前記と同一の符号は同一または同等部分を表している。
【0048】
上記の第1実施形態では、測位要求を送信した携帯無線端末2に対して、各UWBタグ1からそれぞれの設置位置Pの記述された測位応答が返信され、携帯無線端末2では、各測位応答から各UWBタグ1の設置位置Pを抽出していた。しかしながら、このような構成ではUWBタグ1が故障して交換する際など、新規に設置するUWBタグ1ごとに、その設置位置を個別に登録しなければならないので位置登録の手続が煩雑化する。そこで、本実施形態では各UWBタグ1に設置位置を登録することなく識別情報(固有のID)のみを登録しておき、携帯無線端末2が各UWBタグ1のIDに基づいて、その設置位置Pを判別するようにしている。
【0049】
図10において、ID抽出部27は、受信した測位応答からUWBタグ1のIDを抽出する。変換テーブル取得部29は、経路L上に設置された所定の無線タグと通信することで予め変換テーブルを取得し、これを一時記憶する。この変換テーブルでは、各UWBタグ1のIDと設置位置Pとの関係が一元管理されている。
【0050】
位置判別部28は、前記ID抽出部27により抽出された各UWBタグ1のIDをキーとして前記変換テーブルを検索し、当該IDと対応付けられた設置位置Pを判別する。なお、前記変換テーブルは、携帯無線端末2のユーザが測位に先立って当該携帯無線端末2を所定のRFIDタグに近接させるなどして予め取得しておくことが望ましい。
【0051】
本実施形態によれば、各UWBタグ1の設置位置Pを変換テーブルで一元管理できるので、UWBタグ1を移動あるいは交換した場合でも、その位置登録が容易になる。
[第4実施形態]
【0052】
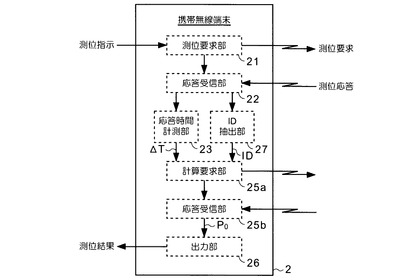
図11,12は、本発明の第4実施形態に係る携帯無線端末2および測位サーバ3の構成を示したブロック図であり、前記と同一の符号は同一または同等部分を表している。本実施形態は、上記の第2、3実施形態を組み合わせた構成となっている。
【0053】
図11の携帯無線端末2において、ID抽出部27は、受信した測位応答からUWBタグ1のIDを抽出する。計算要求部25aは、少なくとも3つのUWBタグ1a,1b,1cに関して、前記応答時間計測部23で計測された応答時間ΔT1,ΔT2,ΔT3および前記ID抽出部27で抽出されたID1,ID2,ID3の記述された計算要求を測位サーバ3へ送信する。
【0054】
図12の測位サーバ3において、計算部32は各UWBタグ1のIDとその設置位置Pとの関係を一元管理する変換テーブル32aを含み、受信した計算要求から少なくとも3つのUWBタグ1a,1b,1cの応答時間ΔT1,ΔT2,ΔT3およびID1,ID2,ID3を抽出し、さらにID1,ID2,ID3をキーとして前記変換テーブル32aを検索することで各UWBタグ1a,1b,1cの設置位置P1,P2,P3を取得する。前記計算部32はさらに、前記図5に関して説明した手法と同一または同等の手法で携帯無線端末2の現在位置P0を算出する。前記変換テーブル32aは、UWBタグ1が移動あるいは交換された際などに、サーバ管理者により適宜に書き換えられる。
【0055】
本実施形態でも、各UWBタグ1の設置位置Pを変換テーブル32aで一元管理できるので、UWBタグ1を移動あるいは交換した場合でも、その位置登録が容易になる。
[第5実施形態]
【0056】
上記の各実施形態では、無線タグ1としてUWBタグを採用し、少なくとも3つのUWBタグ1の設置位置および応答時間を計測して携帯無線端末2の現在位置P0を算出するものとして説明したが、本発明はこれのみに限定されるものではなく、無線タグ1としてRFIDタグを採用し、携帯無線端末2からの測位要求に対して各RFIDタグから返信される測位応答の受信電波強度(Received SignalStrength Indicator)を距離換算して各RFIDタグ1と携帯無線端末2との距離を求め、三角測量により携帯無線端末2の現在位置Pを求めるようにしても良い。
【0057】
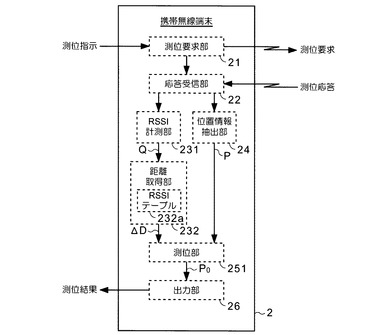
図13、14は、本発明の第5実施形態に係る携帯無線端末2およびRFIDタグ1の主要部の構成を示したブロック図であり、前記と同一の符号は同一または同等部分を表している。本実施形態では、無線タグ1としてRFIDタグ1が分散配置され、携帯無線端末2は、少なくとも3つのRFIDタグ1と通信して自身の現在位置Pを測位する。
【0058】
図13の携帯無線端末2において、RSSI計測部231は、測位要求を受信した各RFIDタグ1から返信される測位応答の受信電波強度(RSSI)を計測する。距離取得部232は、RSSI値Qと距離ΔDとの対応関係を定めたRSSIテーブル232aを備え、RSSI値QをRSSIテーブル232aに適用してRFIDタグ1と携帯無線端末2との距離ΔDを取得する。測位部251は、携帯無線端末2と各RFIDタグ1との距離ΔDおよび各RFIDタグ1の設置位置Pに基づいて自端末2の現在位置P0を算出する。
【0059】
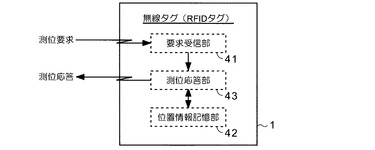
図14のRFIDタグ1において、要求受信部41は測位要求を受信する。位置情報記憶部42には自身の設置位置が記憶されている。測位応答部43は、測位要求が受信されると、前記設置位置の記述された測位応答を携帯無線端末2へ返信する。
【0060】
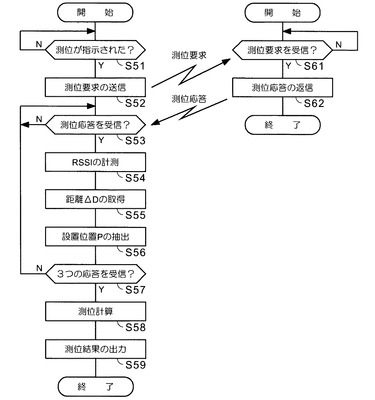
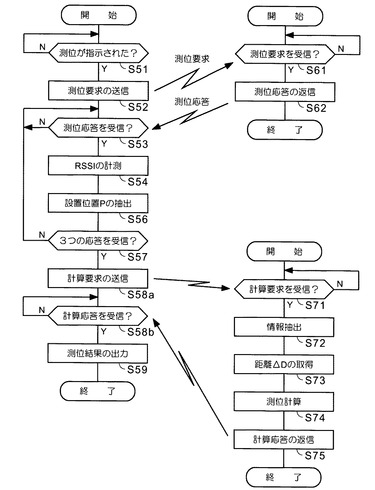
図15は、本実施形態の動作を示したフローチャートである。携帯無線端末2では、ステップS51でユーザUによる測位指示が検知されるとステップS52へ進み、携帯無線端末2に固有の端末IDsの記述された測位要求が、前記測位要求部21からブロードキャストで送信される。
【0061】
各RFIDタグ1では、ステップS61で前記測位要求が要求受信部41により受信されるとステップS62へ進む。ステップS62では、前記位置情報記憶部42に記憶されている自身の設置位置および前記携帯無線端末2の端末IDsの記述された測位応答が前記測位応答部43により返信される。
【0062】
携帯無線端末2では、ステップS53で自端末宛の測位応答が前記応答受信部22により受信されるとステップS54へ進む。ステップS54では、前記RSSI計測部231によりRSSI値Qが計測される。ステップS55では、前記RSSI値Qに基づいてRSSIテーブル232aが参照され、前記距離取得部232により携帯無線端末2からRFIDタグ1までの距離ΔDが取得される。ステップS56では、前記測位応答に記述されているRFIDタグ1の設置位置Pが抽出される。
【0063】
ステップS57において、少なくとも3つのRFIDタグ1a,1b,1cの設置位置P1,P2,P3および距離ΔD1,ΔD2,ΔD3の取得が完了したと判定されるとステップS58へ進み、これらの情報に基づいて携帯無線端末2の現在位置P0が算出される。ステップS59では、前記現在位置P0が表示出力あるいは音声出力されてユーザUに告知される。
【0064】
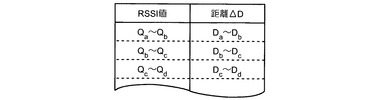
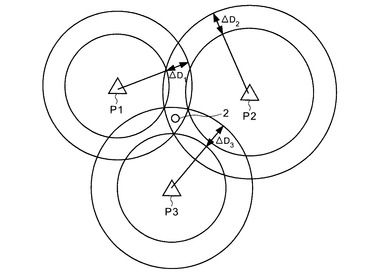
図16、17は、前記ステップS58における現在位置P0の算出方法を模式的に示した図である。
【0065】
本実施形態では、図16に一例を示したように、前記RSSIテーブル232aにおいてRSSI値の範囲と距離の範囲ΔDとが対応付けられており、3つのRFIDタグ1a,1b,1cに関して、その設置位置P1,P2,P3および距離ΔD1,ΔD2,ΔD3が求まると、図17に示したように、各設置位置P1,P2,P3を中心に、それぞれ半径ΔD1,ΔD2,ΔD3の円を仮想的に描き、3つの円の重なる部分の重心位置が携帯無線端末2の現在位置P0として求められる。
[第6実施形態]
【0066】
図18,19は、本発明の第6実施形態に係る携帯無線端末2および測位サーバ3の主要部の構成を示したブロック図であり、それぞれ図7,8と同一の符号は同一または同等部分を表している。本実施形態でも、無線タグ1としてRFIDタグが分散配置され、携帯無線端末2は、少なくとも3つのRFIDタグ1と通信して自身の現在位置Pを測位する。
【0067】
図18の携帯無線端末2において、計算要求部25aは、少なくとも3つのRFIDタグ1a,1b,1cに関して、前記RSSI計測部231で計測された3つのRSSI値Q1,Q2,Q3および前記位置情報抽出部24で抽出された各RFIDタグ1の設置位置P1,P2,P3が記述された計算要求を測位サーバ3へ送信する。
【0068】
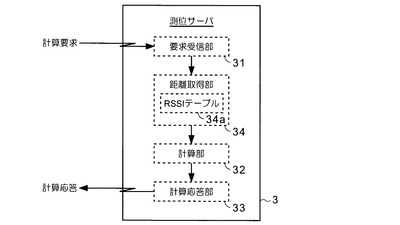
図19の測位サーバ3において、距離取得部34は、受信した計算要求から各RFIDタグのRSSI値Q1,Q2,Q3および設置位置P1,P2,P3を抽出し、各RSSI値Q1,Q2,Q3をRSSIテーブル34aに適用して携帯無線端末2から各RFIDタグまでの距離ΔD1,ΔD2,ΔD3を取得する。計算部32は、距離ΔD1,ΔD2,ΔD3および設置位置P1,P2,P3に基づき、前記図17に関して説明した手法と同一または同等の手法で携帯無線端末2の現在位置P0を算出する。計算応答部33は、この計算結果P0の記述された計算応答を携帯無線端末2へ返信する。
【0069】
図20は、本実施形態の動作を示したフローチャートであり、前記と同一の符号を付したステップでは前記と同一または同等の処理が実行される。
【0070】
携帯無線端末2では、ステップS57において、少なくとも3つのRFIDタグ1a,1b,1cに関して、その設置位置P1,P2,P3およびRSSI値Q1,Q2,Q3の取得が完了したと判定されるとステップS8aへ進み、これらの情報の記述された計算要求が生成されて計算要求部25aから測位サーバ3へ送信される。
【0071】
測位サーバ3では、ステップS71で前記計算要求が要求受信部31で受信されるとステップS72へ進む。ステップS72では、前記計算要求から3つのRFIDタグ1a,1b,1cの設置位置P1,P2,P3およびRSSI値Q1,Q2,Q3が抽出される。ステップS73では、前記各RSS値Qに基づいてRSSIテーブル34aが参照され、前記距離取得部34により携帯無線端末2からRFIDタグ1までの距離ΔD1,ΔD2,ΔD3が取得される。
【0072】
ステップS74では、前記計算部32により、前記3つのRFIDタグ1a,1b,1cの設置位置P1,P2,P3およびその距離ΔD1,ΔD2,ΔD3に基づいて携帯無線端末2の現在位置P0が計算される。ステップS75では、この計算結果の記述された計算応答が計算応答部33から携帯無線端末2へ返信される。
【0073】
携帯無線端末2では、ステップS58bで応答受信部25bにより前記計算応答が受信されるとステップS59へ進む。ステップS59では、計算応答に記述されている現在位置P0が抽出されて表示出力あるいは音声出力される。
【符号の説明】
【0074】
1…無線タグ,2…携帯無線端末,3…測位サーバ,11…要求受信部,12…位置情報記憶部,13…測位応答部,21…測位要求部,22…応答受信部,23…応答時間計測部,24…位置情報抽出部,25…測位部,26…出力部
【技術分野】
【0001】
本発明は、現在位置を測位する測位方法および装置に係り、特に、多数の無線式送受信端末が分散配置され、測位対象の移動端末が複数の無線式送受信端末と通信して現在位置を推定する測位方法およびシステムに関する。
【背景技術】
【0002】
走行中の車両あるいは歩行中の人の現在位置を測位するシステムとして、少なくとも3機のGPS衛星から送信されるGPS信号を受信し、各衛星の位置およびGPS信号の受信時刻を用いた三角交差法により現在位置を算出するGPSシステムが広く普及している。しかしながら、GPSシステムではGPS信号を受信できない屋内などでは測位が困難である。
【0003】
このような技術課題に対して、特許文献1,2には、多数のパッシブタイプのRFIDタグを分散配置し、被験者が携帯リーダを最寄りの一つのRFIDタグに近接させてタグIDを取り込み、サーバに問い合わせることで現在位置を推定する技術が開示されている。特許文献1では、視覚障害者が持つ杖の先端にリーダが装着され、特定の一つのRFIDタグを読み込むことで現在位置が推定される。特許文献2では、車両の通過ポイントに設置されたRFIDタグを車両底面に装着されたリーダで読み込むことで走行位置が推定される。
【0004】
また、特許文献3には、測定対象エリアの異なる所定位置に複数個のリーダを設置し、エリア内を移動する測位対象のRFIDタグとの間で通信を行い、リーダが受信したID情報およびその受信電波強度を、LANなどを介して測位処理部に送り、測位処理部で測位対象の現在位置を三角測量により計算する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−165825号公報
【特許文献2】特開2007−57419号公報
【特許文献3】特開2005−274364号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1,2に開示された従来技術では、分散配置された多数のRFIDタグの一つにリーダを近接させなければならないので、現在位置を推定できる範囲が限定されてしまい、その分解能もRFIDタグの設置数に依存してしまう。したがって、広範囲かつ高い分解能で現在位置を推定できるようにするためには、極めて多数のRFIDタグを配置しなければならないという技術課題があった。
【0007】
特許文献3に開示された従来技術では、リーダをRFIDタグに近接させる動作は不要になるものの、RFIDタグが測位対象に搭載されているので、分散配置された全てのリーダと測位処理部とを通信回線やネットワークで接続して受信データを収集しなければならなかった。
【0008】
なお、上記のRFIDタグとは別に、ZigBee(登録商標)、UWB(Ultra Wide Band)あるいはBluetooth(登録商標)などの近距離無線通信技術が実装された無線タグを用いて測位するシステムも提案されているが、これらの無線タグを分散配置する測位システムも上記と同様の技術課題を抱えている。
【0009】
本発明の目的は、上記した従来技術の課題を解決し、リーダをRFIDタグや送受信端末に近接させる動作が不要でありながら広範囲かつ高い分解能で現在位置を推定でき、かつ分散配置される多数の応答端末を他のシステムやネットワークと未接続の自律状態で使用できる測位方法およびシステムを提供することにある。
【課題を解決するための手段】
【0010】
上記の目的を達成するために、本発明は、多数の無線タグが分散配置され、測位対象の移動端末が複数の無線タグと通信して現在位置を推定する測位システムにおいて、以下のような手段を講じた点に特徴がある。
【0011】
(1)移動端末が、測位要求を送信する手段と、前記測位要求に応答して各無線タグから返信される測位応答を受信する手段と、受信した測位応答に基づいて各無線タグの設置位置を取得する手段と、受信した測位応答に基づいて各無線タグまでの距離を取得する手段と、各無線タグまでの距離および各無線タグの設置位置に基づいて現在位置を推定する手段とを具備したことを特徴とする。
【0012】
(2)各無線タグのIDとその設置位置との対応関係が記述された変換テーブルを受信する手段と、各無線タグから受信した測位応答に記述されたIDを抽出する手段と、抽出した各IDに基づいて変換テーブルから各無線タグの設置位置を取得する手段とを含むことを特徴とする。
【0013】
(3)無線タグが所定の近距離無線通信規格に対応したZigBee(登録商標)タグ、UWBタグおよびBluetooth(登録商標)タグのいずれかであって、移動端末は、測位要求を送信してから測位応答が受信されるまでの応答時間に基づいて距離を取得することを特徴とする請求項4に記載の測位システム。
【0014】
(4)無線タグがRFIDタグであって、移動端末は、受信電波強度と距離とを対応付ける受信電波強度テーブルを具備し、受信した測位応答の受信電波強度に基づいて前記受信電波強度テーブルから距離を取得することを特徴とする。
【0015】
(5)移動端末の現在位置を推定する測位サーバを更に具備し、移動端末は、現在位置の推定に必要な情報を測位サーバへ送信して現在位置の推定結果を受信することを特徴とする。
【0016】
(6)各無線タグが、自身のIDを記憶する手段と、
【0017】
移動端末からの測位要求に応答して、前記IDの記述された測位応答を返信する手段とを具備し、さらに、各無線タグのIDとその設置位置との対応関係が記述された変換テーブルを移動端末へ送信する無線タグを具備したことを特徴とする。
【発明の効果】
【0018】
本発明によれば、以下のような効果が達成される。
【0019】
(1)リーダをタグに近接させる必要がないので、従来技術に較べて少数の無線タグを分散配置するだけで、現在位置を広範囲かつ高い分解能で推定できるのみならず、分散配置される無線タグを他のシステムやネットワーク等と接続する必要がないので、システムの構築が極めて容易になる。
【0020】
(2)各無線タグのIDとその設置位置との対応関係が記述された変換テーブルを設けたので、無線タグを移動あるいは交換する場合でも、その後の位置登録が容易になる。
【0021】
(3)近距離無線通信規格に対応した無線タグを分散配置し、測位要求に対して返信される測位応答の応答時間に基づいて距離を算出するようにしたので、常に正確な測位が可能になる。
【0022】
(4)RFIDタグを分散配置し、受信電波強度に基づいて距離を算出するようにしたので、簡単な構成で測位が可能になる。
【0023】
(5)測位サーバを別途に設けて現在位置の算出を依頼するようにしたので、移動端末の処理能力の低い場合でも正確な測位が可能になる。
【0024】
(6)移動端末が、各無線タグのIDとその設置位置との対応関係が記述された変換テーブルをその都度受信して一時記憶するようにしたので、多数の変換テーブルを記憶しておくための大きな記憶容量が不要になる。
【図面の簡単な説明】
【0025】
【図1】本発明の第1実施形態に係る測位システムのネットワーク構成を示した図である。
【図2】第1実施形態における携帯無線端末の構成を示したブロック図である。
【図3】第1、2実施形態における無線タグの構成を示したブロック図である。
【図4】第1実施形態の動作を示したフローチャートである。
【図5】現在位置の算出方法を説明するための図である。
【図6】本発明の第2実施形態に係る測位システムのネットワーク構成を示した図である。
【図7】第2実施形態における携帯無線端末の構成を示したブロック図である。
【図8】第2実施形態における測位サーバの構成を示したブロック図である。
【図9】第2実施形態の動作を示したフローチャートである。
【図10】第3実施形態における携帯無線端末の構成を示したブロック図である。
【図11】第4実施形態における携帯無線端末の構成を示したブロック図である。
【図12】第4実施形態における測位サーバ構成を示したブロック図である。
【図13】第5実施形態における携帯無線端末の構成を示したブロック図である。
【図14】第5実施形態における無線タグの構成を示したブロック図である。
【図15】第5実施形態の動作を示したフローチャートである。
【図16】RSSIテーブルの一例を示した図である。
【図17】現在位置の算出方法を説明するための図である。
【図18】第6実施形態における携帯無線端末の構成を示したブロック図である。
【図19】第6実施形態における測位サーバ構成を示したブロック図である。
【図20】第6実施形態の動作を示したフローチャートである。
【発明を実施するための形態】
【0026】
以下、図面を参照して本発明の最良の実施形態について詳細に説明する。ここでは、測位対象となる移動端末が携帯無線端末である場合を例にして説明する。
[第1実施形態]
【0027】
図1は、本発明の第1実施形態に係る測位システムのネットワーク構成を示したブロック図であり、経路L上またはその周囲に分散位置されて自律動作する多数の無線タグ1と、ユーザUからの測位指示を検知して複数の無線タグ1と通信し、自端末の現在位置を測位する携帯無線端末2とを主要な構成としている。ここでは、前記無線タグ1としてUWB(Ultra Wide Band)タグを用いる場合を例にして説明するが、ZigBee(登録商標)タグやBluetooth(登録商標)タグなど、他の近距離無線通信の規格に対応した無線タグを用いる場合も同等に適用できる。
【0028】
図2は、前記携帯無線端末2の主要部の構成を示したブロック図であり、ここでは、本発明の説明に不要な構成は図示が省略されている。
【0029】
測位要求部21は、ユーザUによる測位指示のキー入力操作などを検知して測位要求を送信する。応答受信部22は、前記測位要求を受信したUWBタグ1から返信される測位応答を受信する。応答時間計測部23は、例えば測位要求の送信時刻から測位応答の受信時刻までの経過時間を応答時間ΔTとして計測する。位置情報抽出部24は、各測位応答に記述されている各UWBタグ1の設置位置Pを抽出する。測位部25は、各UWBタグ1の応答時間ΔTおよび各UWBタグ1の設置位置Pに基づいて自端末2の現在位置P0を算出する。出力部26は、前記測位の結果を表示出力または音声出力する。
【0030】
図3は、前記UWBタグ1の主要部の構成を示したブロック図であり、ここでも、本発明の説明に不要な構成は図示が省略されている。
【0031】
要求受信部11は、前記携帯無線端末2から送信された測位要求を受信する。位置情報記憶部12には自身の現在位置(設置位置)が記憶されている。測位応答部13は、測位要求が受信されると、前記設置位置の記述された測位応答を携帯無線端末2へ返信する。
【0032】
図4は、本実施形態の動作を示したフローチャートである。携帯無線端末2では、ステップS1でユーザUによる測位指示が検知されるとステップS2へ進み、携帯無線端末2に固有の端末IDsの記述された測位要求が、前記測位要求部21からブロードキャストで送信される。ステップS3では、応答時間を計測するタイマが計時を開始する。
【0033】
各UWBタグ1では、ステップS21で前記測位要求が要求受信部11により受信されるとステップS22へ進む。ステップS22では、前記位置情報記憶部12に記憶されている自身の設置位置および前記携帯無線端末2の端末IDsの記述された測位応答が前記測位応答部13により返信される。
【0034】
携帯無線端末2では、ステップS4で自端末宛の測位応答が前記応答受信部22により受信されるとステップS5へ進む。ステップS5では、前記測位要求の送信時刻から測位応答の受信時刻までの経過時間が、応答時間ΔTとして前記応答時間計測部23により計測される。ステップS6では、前記測位応答に記述されているUWBタグ1の設置位置Pが抽出される。ステップS7では、少なくとも3つのUWBタグ1(1a,1b,1c)から測位応答を受信できたか否かが判定される。受信できていなければステップS4へ戻って上記の各処理が繰り返される。
【0035】
少なくとも3つのUWBタグ1a,1b,1cに関して、その設置位置P1,P2,P3および応答時間ΔT1,T2,T3の取得が完了するとステップS8へ進み、これらの情報に基づいて携帯無線端末2の現在位置P0が算出される。ステップS9では、前記現在位置P0が表示出力あるいは音声出力されてユーザUに告知される。
【0036】
図5は、前記ステップS8における現在位置P0の算出方法を示した図である。始めに、同図(a)に示したように、3つのUWBタグ1a,1b,1cの応答時間ΔT1,T2,T3が次式(1)−(3)に適用されて各UWBタグ1a,1b,1cと携帯無線端末2との距離D1,D2,D3の差分が算出される。なお、符号αは換算計数である。
D1−D2=α・(ΔT1−ΔT2)/2 … (1)
D2−D3=α・(ΔT2−ΔT3)/2 … (2)
D3−D1=α・(ΔT3−ΔT1)/2 … (3)
【0037】
次いで、同図(b)に示したように、各UWBタグ1a,1b,1cからの距離の差が前記各差分と等しくなる3つの線分が求められ、その交点が算出されて携帯無線端末2の現在位置P0とされる。
[第2実施形態]
【0038】
図6は、本発明の第2実施形態に係る測位システムのネットワーク構成を示したブロック図であり、経路L上またはその周囲に分散位置されて自律動作する多数のUWBタグ1と、複数のUWBタグ1と通信して測位に必要な情報を取得する携帯無線端末2と、これらの情報を携帯無線端末2から受信して当該携帯無線端末2の現在位置を計算し、計算結果を返信する測位サーバ3とを主要な構成としている。
【0039】
図7は、前記携帯無線端末2の主要部の構成を示したブロック図であり、前記と同一の符号は同一または同等部分を表しているので、その説明は省略する。
【0040】
計算要求部25aは、少なくとも3つのUWBタグ1a,1b,1cに関して、前記応答時間計測部23で計測された応答時間ΔT1,T2,T3、および前記位置情報抽出部24で抽出された各UWBタグ1の設置位置P1,P2,P3の記述された計算要求を測位サーバ3へ送信する。応答受信部25bは、前記測位サーバ3から返信される計算応答を受信して携帯無線端末2の現在位置P0を抽出する。なお、各UWBタグ1の構成は第1実施形態と同一または同等なので、その説明は省略する。
【0041】
図8は、前記測位サーバ3の主要部の構成を示したブロック図であり、ここでは、本発明の説明に不要な構成は図示が省略されている。
【0042】
要求受信部31は、携帯無線端末2から送信される計算要求を受信する。計算部32は、受信した計算要求から各UWBタグ1a,1b,1cの応答時間ΔT1,ΔT2,ΔT3および設置位置P1,P2,P3を抽出し、前記図5に関して説明した手法と同一または同等の手法で携帯無線端末2の現在位置P0を算出する。計算応答部33は、この計算結果P0の記述された計算応答を携帯無線端末2へ返信する。
【0043】
図9は、本実施形態の動作を示したフローチャートであり、前記と同一の符号を付したステップでは前記と同一または同等の処理が実行される。
【0044】
携帯無線端末2では、ステップS7において、少なくとも3つのUWBタグ1a,1b,1cの設置位置P1,P2,P3および応答時間ΔT1,ΔT2,ΔT3の取得が完了したと判定されるとステップS8aへ進み、これらの情報の記述された計算要求メッセージが生成されて計算要求部25aから測位サーバ3へ送信される。
【0045】
測位サーバ3では、ステップS31で前記計算要求が要求受信部31で受信されるとステップS32へ進む。ステップS32では、前記計算部33により計算要求から3つのUWBタグ1a,1b,1cの設置位置P1,P2,P3および応答時間ΔT1,ΔT2,ΔT3が抽出され、ステップS33では、これらの情報に基づいて携帯無線端末2の現在位置P0が計算される。ステップS34では、この計算結果の記述された計算応答が計算応答部33から携帯無線端末2へ返信される。
【0046】
携帯無線端末2では、ステップS8bで応答受信部25bにより前記計算応答が受信されるとステップS9へ進む。ステップS9では、計算応答に記述されている現在位置P0が抽出されて表示出力あるいは音声出力される。
[第3実施形態]
【0047】
図10は、本発明の第3実施形態に係る携帯無線端末2の構成を示したブロック図であり、前記と同一の符号は同一または同等部分を表している。
【0048】
上記の第1実施形態では、測位要求を送信した携帯無線端末2に対して、各UWBタグ1からそれぞれの設置位置Pの記述された測位応答が返信され、携帯無線端末2では、各測位応答から各UWBタグ1の設置位置Pを抽出していた。しかしながら、このような構成ではUWBタグ1が故障して交換する際など、新規に設置するUWBタグ1ごとに、その設置位置を個別に登録しなければならないので位置登録の手続が煩雑化する。そこで、本実施形態では各UWBタグ1に設置位置を登録することなく識別情報(固有のID)のみを登録しておき、携帯無線端末2が各UWBタグ1のIDに基づいて、その設置位置Pを判別するようにしている。
【0049】
図10において、ID抽出部27は、受信した測位応答からUWBタグ1のIDを抽出する。変換テーブル取得部29は、経路L上に設置された所定の無線タグと通信することで予め変換テーブルを取得し、これを一時記憶する。この変換テーブルでは、各UWBタグ1のIDと設置位置Pとの関係が一元管理されている。
【0050】
位置判別部28は、前記ID抽出部27により抽出された各UWBタグ1のIDをキーとして前記変換テーブルを検索し、当該IDと対応付けられた設置位置Pを判別する。なお、前記変換テーブルは、携帯無線端末2のユーザが測位に先立って当該携帯無線端末2を所定のRFIDタグに近接させるなどして予め取得しておくことが望ましい。
【0051】
本実施形態によれば、各UWBタグ1の設置位置Pを変換テーブルで一元管理できるので、UWBタグ1を移動あるいは交換した場合でも、その位置登録が容易になる。
[第4実施形態]
【0052】
図11,12は、本発明の第4実施形態に係る携帯無線端末2および測位サーバ3の構成を示したブロック図であり、前記と同一の符号は同一または同等部分を表している。本実施形態は、上記の第2、3実施形態を組み合わせた構成となっている。
【0053】
図11の携帯無線端末2において、ID抽出部27は、受信した測位応答からUWBタグ1のIDを抽出する。計算要求部25aは、少なくとも3つのUWBタグ1a,1b,1cに関して、前記応答時間計測部23で計測された応答時間ΔT1,ΔT2,ΔT3および前記ID抽出部27で抽出されたID1,ID2,ID3の記述された計算要求を測位サーバ3へ送信する。
【0054】
図12の測位サーバ3において、計算部32は各UWBタグ1のIDとその設置位置Pとの関係を一元管理する変換テーブル32aを含み、受信した計算要求から少なくとも3つのUWBタグ1a,1b,1cの応答時間ΔT1,ΔT2,ΔT3およびID1,ID2,ID3を抽出し、さらにID1,ID2,ID3をキーとして前記変換テーブル32aを検索することで各UWBタグ1a,1b,1cの設置位置P1,P2,P3を取得する。前記計算部32はさらに、前記図5に関して説明した手法と同一または同等の手法で携帯無線端末2の現在位置P0を算出する。前記変換テーブル32aは、UWBタグ1が移動あるいは交換された際などに、サーバ管理者により適宜に書き換えられる。
【0055】
本実施形態でも、各UWBタグ1の設置位置Pを変換テーブル32aで一元管理できるので、UWBタグ1を移動あるいは交換した場合でも、その位置登録が容易になる。
[第5実施形態]
【0056】
上記の各実施形態では、無線タグ1としてUWBタグを採用し、少なくとも3つのUWBタグ1の設置位置および応答時間を計測して携帯無線端末2の現在位置P0を算出するものとして説明したが、本発明はこれのみに限定されるものではなく、無線タグ1としてRFIDタグを採用し、携帯無線端末2からの測位要求に対して各RFIDタグから返信される測位応答の受信電波強度(Received SignalStrength Indicator)を距離換算して各RFIDタグ1と携帯無線端末2との距離を求め、三角測量により携帯無線端末2の現在位置Pを求めるようにしても良い。
【0057】
図13、14は、本発明の第5実施形態に係る携帯無線端末2およびRFIDタグ1の主要部の構成を示したブロック図であり、前記と同一の符号は同一または同等部分を表している。本実施形態では、無線タグ1としてRFIDタグ1が分散配置され、携帯無線端末2は、少なくとも3つのRFIDタグ1と通信して自身の現在位置Pを測位する。
【0058】
図13の携帯無線端末2において、RSSI計測部231は、測位要求を受信した各RFIDタグ1から返信される測位応答の受信電波強度(RSSI)を計測する。距離取得部232は、RSSI値Qと距離ΔDとの対応関係を定めたRSSIテーブル232aを備え、RSSI値QをRSSIテーブル232aに適用してRFIDタグ1と携帯無線端末2との距離ΔDを取得する。測位部251は、携帯無線端末2と各RFIDタグ1との距離ΔDおよび各RFIDタグ1の設置位置Pに基づいて自端末2の現在位置P0を算出する。
【0059】
図14のRFIDタグ1において、要求受信部41は測位要求を受信する。位置情報記憶部42には自身の設置位置が記憶されている。測位応答部43は、測位要求が受信されると、前記設置位置の記述された測位応答を携帯無線端末2へ返信する。
【0060】
図15は、本実施形態の動作を示したフローチャートである。携帯無線端末2では、ステップS51でユーザUによる測位指示が検知されるとステップS52へ進み、携帯無線端末2に固有の端末IDsの記述された測位要求が、前記測位要求部21からブロードキャストで送信される。
【0061】
各RFIDタグ1では、ステップS61で前記測位要求が要求受信部41により受信されるとステップS62へ進む。ステップS62では、前記位置情報記憶部42に記憶されている自身の設置位置および前記携帯無線端末2の端末IDsの記述された測位応答が前記測位応答部43により返信される。
【0062】
携帯無線端末2では、ステップS53で自端末宛の測位応答が前記応答受信部22により受信されるとステップS54へ進む。ステップS54では、前記RSSI計測部231によりRSSI値Qが計測される。ステップS55では、前記RSSI値Qに基づいてRSSIテーブル232aが参照され、前記距離取得部232により携帯無線端末2からRFIDタグ1までの距離ΔDが取得される。ステップS56では、前記測位応答に記述されているRFIDタグ1の設置位置Pが抽出される。
【0063】
ステップS57において、少なくとも3つのRFIDタグ1a,1b,1cの設置位置P1,P2,P3および距離ΔD1,ΔD2,ΔD3の取得が完了したと判定されるとステップS58へ進み、これらの情報に基づいて携帯無線端末2の現在位置P0が算出される。ステップS59では、前記現在位置P0が表示出力あるいは音声出力されてユーザUに告知される。
【0064】
図16、17は、前記ステップS58における現在位置P0の算出方法を模式的に示した図である。
【0065】
本実施形態では、図16に一例を示したように、前記RSSIテーブル232aにおいてRSSI値の範囲と距離の範囲ΔDとが対応付けられており、3つのRFIDタグ1a,1b,1cに関して、その設置位置P1,P2,P3および距離ΔD1,ΔD2,ΔD3が求まると、図17に示したように、各設置位置P1,P2,P3を中心に、それぞれ半径ΔD1,ΔD2,ΔD3の円を仮想的に描き、3つの円の重なる部分の重心位置が携帯無線端末2の現在位置P0として求められる。
[第6実施形態]
【0066】
図18,19は、本発明の第6実施形態に係る携帯無線端末2および測位サーバ3の主要部の構成を示したブロック図であり、それぞれ図7,8と同一の符号は同一または同等部分を表している。本実施形態でも、無線タグ1としてRFIDタグが分散配置され、携帯無線端末2は、少なくとも3つのRFIDタグ1と通信して自身の現在位置Pを測位する。
【0067】
図18の携帯無線端末2において、計算要求部25aは、少なくとも3つのRFIDタグ1a,1b,1cに関して、前記RSSI計測部231で計測された3つのRSSI値Q1,Q2,Q3および前記位置情報抽出部24で抽出された各RFIDタグ1の設置位置P1,P2,P3が記述された計算要求を測位サーバ3へ送信する。
【0068】
図19の測位サーバ3において、距離取得部34は、受信した計算要求から各RFIDタグのRSSI値Q1,Q2,Q3および設置位置P1,P2,P3を抽出し、各RSSI値Q1,Q2,Q3をRSSIテーブル34aに適用して携帯無線端末2から各RFIDタグまでの距離ΔD1,ΔD2,ΔD3を取得する。計算部32は、距離ΔD1,ΔD2,ΔD3および設置位置P1,P2,P3に基づき、前記図17に関して説明した手法と同一または同等の手法で携帯無線端末2の現在位置P0を算出する。計算応答部33は、この計算結果P0の記述された計算応答を携帯無線端末2へ返信する。
【0069】
図20は、本実施形態の動作を示したフローチャートであり、前記と同一の符号を付したステップでは前記と同一または同等の処理が実行される。
【0070】
携帯無線端末2では、ステップS57において、少なくとも3つのRFIDタグ1a,1b,1cに関して、その設置位置P1,P2,P3およびRSSI値Q1,Q2,Q3の取得が完了したと判定されるとステップS8aへ進み、これらの情報の記述された計算要求が生成されて計算要求部25aから測位サーバ3へ送信される。
【0071】
測位サーバ3では、ステップS71で前記計算要求が要求受信部31で受信されるとステップS72へ進む。ステップS72では、前記計算要求から3つのRFIDタグ1a,1b,1cの設置位置P1,P2,P3およびRSSI値Q1,Q2,Q3が抽出される。ステップS73では、前記各RSS値Qに基づいてRSSIテーブル34aが参照され、前記距離取得部34により携帯無線端末2からRFIDタグ1までの距離ΔD1,ΔD2,ΔD3が取得される。
【0072】
ステップS74では、前記計算部32により、前記3つのRFIDタグ1a,1b,1cの設置位置P1,P2,P3およびその距離ΔD1,ΔD2,ΔD3に基づいて携帯無線端末2の現在位置P0が計算される。ステップS75では、この計算結果の記述された計算応答が計算応答部33から携帯無線端末2へ返信される。
【0073】
携帯無線端末2では、ステップS58bで応答受信部25bにより前記計算応答が受信されるとステップS59へ進む。ステップS59では、計算応答に記述されている現在位置P0が抽出されて表示出力あるいは音声出力される。
【符号の説明】
【0074】
1…無線タグ,2…携帯無線端末,3…測位サーバ,11…要求受信部,12…位置情報記憶部,13…測位応答部,21…測位要求部,22…応答受信部,23…応答時間計測部,24…位置情報抽出部,25…測位部,26…出力部
【特許請求の範囲】
【請求項1】
多数の無線タグが分散配置され、測位対象の移動端末が複数の無線タグと通信して現在位置を推定する測位システムにおいて、
前記移動端末が、
測位要求を送信する手段と、
前記測位要求に応答して各無線タグから返信される測位応答を受信する手段と、
受信した測位応答に基づいて各無線タグの設置位置を取得する手段と、
受信した測位応答に基づいて各無線タグまでの距離を取得する手段と、
前記設置位置および距離に基づいて移動端末の現在位置を推定する手段とを具備したことを特徴とする測位システム。
【請求項2】
前記各無線タグの設置位置を取得する手段は、受信した測位応答に記述されている設置位置を抽出することを特徴とする請求項1に記載の測位システム。
【請求項3】
前記各無線タグの設置位置を判別する手段は、
各無線タグのIDと設置位置との対応関係が記述された変換テーブルを受信する手段と、
各無線タグから受信した測位応答に記述されたIDを抽出する手段と、
前記抽出した各IDに基づいて前記変換テーブルから各無線タグの設置位置を取得する手段とを含むことを特徴とする請求項1に記載の測位システム。
【請求項4】
前記無線タグが、所定の近距離無線通信規格に対応したZigBee(登録商標)タグ、UWBタグおよびBluetooth(登録商標)タグのいずれかであることを特徴とする請求項1ないし3のいずれかに記載の測位システム。
【請求項5】
前記各無線タグまでの距離を取得する手段は、前記測位要求を送信してから測位応答が受信されるまでの応答時間に基づいて距離を取得することを特徴とする請求項4に記載の測位システム。
【請求項6】
前記無線タグがRFIDタグであることを特徴とする請求項1ないし3のいずれかに記載の測位システム。
【請求項7】
前記各無線タグまでの距離を取得する手段は、受信電波強度と距離とを対応付ける受信電波強度テーブルを具備し、
受信した測位応答の受信電波強度に基づいて前記受信電波強度テーブルから距離を取得することを特徴とする請求項6に記載の測位システム。
【請求項8】
移動端末の現在位置を推定する測位サーバを更に具備し、
前記移動端末の現在位置を推定する手段は、現在位置の推定に必要な情報を測位サーバへ送信して現在位置の推定結果を受信することを特徴とする請求項1ないし7のいずれかに記載の測位システム。
【請求項9】
多数の無線タグが分散配置され、測位対象の移動端末が複数の無線タグと通信して現在位置を推定する測位システムにおいて、
前記各無線タグが、
自身の設置位置を記憶する手段と、
移動端末からの測位要求に応答して、前記設置位置の記述された測位応答を返信する手段とを具備したことを特徴とする測位システム。
【請求項10】
多数の無線タグが分散配置され、測位対象の移動端末が複数の無線タグと通信して現在位置を推定する測位システムにおいて、
前記各無線タグが、
自身のIDを記憶する手段と、
移動端末からの測位要求に応答して、前記IDの記述された測位応答を返信する手段とを具備し、さらに、
各無線タグのIDとその設置位置との対応関係が記述された変換テーブルを移動端末へ送信する無線タグを具備したことを特徴とする測位システム。
【請求項11】
多数の無線タグが分散配置され、測位対象の移動端末が複数の無線タグと通信して現在位置を推定する測位方法において、
移動端末が測位要求を送信する手順と、
各無線タグが、前記測位要求に応答して自身の設置位置の記述された測位応答を返信する手順と、
移動端末が、各無線タグから測位応答を受信して各無線タグの設置位置を取得する手順と、
移動端末が、各無線タグから受信した測位応答に基づいて各無線タグまでの距離を取得する手順と、
移動端末が、前記各無線タグまでの距離および各無線タグの設置位置に基づいて現在位置を推定する手順とを具備したことを特徴とする測位方法。
【請求項1】
多数の無線タグが分散配置され、測位対象の移動端末が複数の無線タグと通信して現在位置を推定する測位システムにおいて、
前記移動端末が、
測位要求を送信する手段と、
前記測位要求に応答して各無線タグから返信される測位応答を受信する手段と、
受信した測位応答に基づいて各無線タグの設置位置を取得する手段と、
受信した測位応答に基づいて各無線タグまでの距離を取得する手段と、
前記設置位置および距離に基づいて移動端末の現在位置を推定する手段とを具備したことを特徴とする測位システム。
【請求項2】
前記各無線タグの設置位置を取得する手段は、受信した測位応答に記述されている設置位置を抽出することを特徴とする請求項1に記載の測位システム。
【請求項3】
前記各無線タグの設置位置を判別する手段は、
各無線タグのIDと設置位置との対応関係が記述された変換テーブルを受信する手段と、
各無線タグから受信した測位応答に記述されたIDを抽出する手段と、
前記抽出した各IDに基づいて前記変換テーブルから各無線タグの設置位置を取得する手段とを含むことを特徴とする請求項1に記載の測位システム。
【請求項4】
前記無線タグが、所定の近距離無線通信規格に対応したZigBee(登録商標)タグ、UWBタグおよびBluetooth(登録商標)タグのいずれかであることを特徴とする請求項1ないし3のいずれかに記載の測位システム。
【請求項5】
前記各無線タグまでの距離を取得する手段は、前記測位要求を送信してから測位応答が受信されるまでの応答時間に基づいて距離を取得することを特徴とする請求項4に記載の測位システム。
【請求項6】
前記無線タグがRFIDタグであることを特徴とする請求項1ないし3のいずれかに記載の測位システム。
【請求項7】
前記各無線タグまでの距離を取得する手段は、受信電波強度と距離とを対応付ける受信電波強度テーブルを具備し、
受信した測位応答の受信電波強度に基づいて前記受信電波強度テーブルから距離を取得することを特徴とする請求項6に記載の測位システム。
【請求項8】
移動端末の現在位置を推定する測位サーバを更に具備し、
前記移動端末の現在位置を推定する手段は、現在位置の推定に必要な情報を測位サーバへ送信して現在位置の推定結果を受信することを特徴とする請求項1ないし7のいずれかに記載の測位システム。
【請求項9】
多数の無線タグが分散配置され、測位対象の移動端末が複数の無線タグと通信して現在位置を推定する測位システムにおいて、
前記各無線タグが、
自身の設置位置を記憶する手段と、
移動端末からの測位要求に応答して、前記設置位置の記述された測位応答を返信する手段とを具備したことを特徴とする測位システム。
【請求項10】
多数の無線タグが分散配置され、測位対象の移動端末が複数の無線タグと通信して現在位置を推定する測位システムにおいて、
前記各無線タグが、
自身のIDを記憶する手段と、
移動端末からの測位要求に応答して、前記IDの記述された測位応答を返信する手段とを具備し、さらに、
各無線タグのIDとその設置位置との対応関係が記述された変換テーブルを移動端末へ送信する無線タグを具備したことを特徴とする測位システム。
【請求項11】
多数の無線タグが分散配置され、測位対象の移動端末が複数の無線タグと通信して現在位置を推定する測位方法において、
移動端末が測位要求を送信する手順と、
各無線タグが、前記測位要求に応答して自身の設置位置の記述された測位応答を返信する手順と、
移動端末が、各無線タグから測位応答を受信して各無線タグの設置位置を取得する手順と、
移動端末が、各無線タグから受信した測位応答に基づいて各無線タグまでの距離を取得する手順と、
移動端末が、前記各無線タグまでの距離および各無線タグの設置位置に基づいて現在位置を推定する手順とを具備したことを特徴とする測位方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2010−175374(P2010−175374A)
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願番号】特願2009−18012(P2009−18012)
【出願日】平成21年1月29日(2009.1.29)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願日】平成21年1月29日(2009.1.29)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
[ Back to top ]