
測位装置、及び測位方法

【課題】様々な場所でできるだけ正確な位置を測位できるようにする。
【解決手段】
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度と低感度の衛星信号受信機能を有し、高感度の衛星信号受信機能を使って演算された高感度での位置情報と、低感度の衛星信号受信機能を使って演算された低感度での位置情報とを、選択的に又は並行的に出力する航法衛星センサと、航法衛星センサから前記高感度での位置情報と低感度での位置情報とを選択的に又は並行的に取得して、高感度での位置情報と低感度での位置情報のいずれか一方を、移動体の現在位置を示す現在位置情報として選択する測位制御装置と、を備える測位装置。
【解決手段】
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度と低感度の衛星信号受信機能を有し、高感度の衛星信号受信機能を使って演算された高感度での位置情報と、低感度の衛星信号受信機能を使って演算された低感度での位置情報とを、選択的に又は並行的に出力する航法衛星センサと、航法衛星センサから前記高感度での位置情報と低感度での位置情報とを選択的に又は並行的に取得して、高感度での位置情報と低感度での位置情報のいずれか一方を、移動体の現在位置を示す現在位置情報として選択する測位制御装置と、を備える測位装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、航法衛星システムを使用した移動体の位置の測位に関する。
【背景技術】
【0002】
従来から、建設機械などの移動体を監視するために、移動体に通信端末装置を搭載し、この通信端末装置から移動体の位置、稼働状況、コンディションなどの移動体情報を管理装置側に送信し、管理装置では、この移動体情報をもとに定期整備部品の交換や異常発生を迅速に管理者側に通知し、適切かつ迅速な処置が施せるようにした移動体管理システムが実現されている。
【0003】
ここで、移動体の位置の測位には、GPS(Global Positioning System)又はGLONASS(Global Navigation Satellite System)等の航法衛星システム(Navigation Satellite System)が使用されている。以下、航法衛星システムに関して便宜的にGPSを例にとり説明するが、以下の説明はGPS以外の航法衛星システムについても同様にあてはまる、又は将来あてはまることになるであろう。
【0004】
近年、技術の進歩によって、GPS衛星からの衛星信号(測位信号あるいは測距信号とよばれる信号)を受信するGPSセンサの受信感度を高くすることができるようになった。これにより、例えば、建物の中など、GPS衛星からの信号強度が弱い場所でも、GPSセンサが信号を受信できるようになった。
【0005】
しかし、GPSセンサが弱い信号も受信できてしまうために、反射波の信号(いわゆるマルチパス信号)等も受信してしまい、誤った位置を測位してしまうという問題がある。そのため、この問題を解決する手段が種々提案されている。
【0006】
例えば、特許文献1では、マルチパスの発生しやすい場所を予め地図情報に登録しておき、自車の現在位置がマルチパスの発生しやすい場所であるか否かに基づき、位置を測位する際の条件を変えている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−264076号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、建設機械などが使用される作業現場は、都市部だけでなく、山奥、僻地、発展途上の海外など、特許文献1のように必ずしも地図が正確に存在する場所とは限らない。しかも、そのような場所は、携帯電話の信号が届かず、携帯電話での測位で一般的に行われている携帯電話の信号による位置の補正などが不可能な場合も多い。
【0009】
したがって、建設機械などは、GPSセンサが受信する衛星信号のみから、できるだけ正確な位置を測位する必要がある。しかし、前述の通り、受信感度の高いGPSセンサは、マルチパス信号等の影響により、時々位置を誤って測位(以下「誤測位」)してしまうという問題がある。一方で、受信感度の低いGPSセンサでは、信号強度の弱い場所では測位ができないという問題がある。
【0010】
そこで、本発明の目的は、様々な場所でできるだけ正確な移動体の位置を測位できるようにすることである。
【0011】
また、本発明の別の目的は、受信感度の高いGPSセンサが位置を誤測位したときの悪影響を低減することである。
【課題を解決するための手段】
【0012】
本発明の測位装置は、移動体(1)に搭載され、移動体の位置を測定する測位装置(10と16)であって、
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度と低感度の衛星信号受信機能を有し、高感度の衛星信号受信機能を使って演算された高感度での位置情報と、低感度の衛星信号受信機能を使って演算された低感度での位置情報とを、選択的に又は並行的に出力する航法衛星センサ(16)と、
航法衛星センサから高感度での位置情報と低感度での位置情報とを選択的に又は並行的に取得して、高感度での位置情報と低感度での位置情報のいずれか一方を、移動体の現在位置を示す現在位置情報として選択する測位制御装置(10)と、を備え、
測位制御装置は、以下の処理A)からD)、
A)衛星航法センサから高感度での位置情報を取得して、取得された高感度での位置情報に誤測位の可能性があるか否か推定し(S402−S403、S603−S603)、
B)処理A)で誤測位の可能性が推定されないときには、取得された高感度での位置情報を、現在位置情報として選択し(S420、S620)、
C)処理A)で誤測位の可能性が推定されたときには、その後に、
C1)第1の所定時間の間の1回以上の機会に、衛星航法センサから高感度での位置情報を再取得して、再取得された高感度での位置情報に誤測位の可能性があるか否か推定する第1の処理と(S404−S407、S604−S607)、
C2)第2の所定時間の間の1回以上の機会に、衛星航法センサから低感度での位置情報の取得を試みる第2の処理と(S408−S411、S608−S611)、
を逐次的にまたは並行的に行い、
D)処理C1)で第1の所定時間の間の或る第1の機会に誤測位の可能性が推定されなかったならば、第1の機会に再取得された高感度での位置情報を、現在位置情報として選択し(S420−S414、S620−S615)、処理C2)で第2の所定時間の間の或る第2の機会に低感度での位置情報が取得されたならば、第2の機会に取得された低感度での位置情報を、現在位置情報として選択する(S421−S414、S621−S615)を実行する。
【0013】
好適な実施形態では、上記測位制御装置は、上記処理A)を実行するとき、上記処理A)で取得された高感度での位置情報と最近過去に実行された上記処理D)で出力又は記憶された過去の位置情報との間の距離を算出し、算出された距離に基づいて、誤測位の可能性があるか否かを推定してもよい。
【0014】
好適な実施形態では、上記第2の所定時間が上記第1の所定時間より短いこととしてもよい。
【0015】
好適な実施形態では、上記測位制御装置は、上記処理C)を実行するとき、最初に上記処理C1)を実行し(S404−S407)、 最初に実行された上記処理C1)で全ての機会に誤測位の可能性が推定されたならば(S406でNo)、上記処理C2)を実行し(S408−S411)、そうでなければ(S406でYes)、上記処理C2)の実行を省略することとしてもよい。
【0016】
好適な実施形態では、上記測位制御装置は、上記処理C)を1回実行した結果、上記処理C1)で全ての機会に誤測位の可能性が推定され(S406でNo)、かつ上記処理C2)ですべての機会に低感度での位置情報が取得できなかったならば(S410でNo)、上記処理C)を再度実行することとしてもよい(S401、S412)。
【0017】
好適な実施形態では、上記測位制御装置は、上記処理C)を所定のループ回数まで繰り返した結果、まだなお、上記処理C1)で全ての機会に誤測位の可能性が推定され、かつ上記処理C2)ですべての機会に低感度での位置情報が取得できなかったならば、最近過去に実行された上記処理D)で選択された過去の位置情報を、再度、現在位置情報として選択することとしてもよい(S413−S414)。
【0018】
好適な実施形態では、航法衛星センサの高感度の受信機能は、所定の第1の電力値又はSN比値より大きい又は高い電力又は受信SN比をもつ衛星信号のみを測位に使用し、低感度の受信機能は、所定の第2の電力値又はSN比値より大きい又は高い電力又は受信SN比をもつ衛星信号のみを測位に使用し、第2の電力値又はSN比値が、第1の電力値又はSN比値より大きい又は高いこととしてもよい。
【0019】
好適な実施形態では、航法衛星センサの高感度の受信機能は、所定の第1の仰角値より大きい仰角の方向に位置する衛星からの衛星信号のみを測位に使用し、低感度の受信機能は、所定の第2の仰角値より大きい仰角の方向に位置する衛星からの衛星信号のみを測位に使用し、第2の仰角値が、第1の仰角値より大きいこととしてもよい。
【0020】
好適な実施形態では、航法衛星センサの高感度の受信機能は、電力の大きい順において第1位から第1の順位までの電力をもつ衛星からの衛星信号のみを測位に使用し、低感度の受信機能は、電力の大きい順において第1位から第2の順位までの電力をもつ衛星からの衛星信号のみを測位に使用し、第2の順位が、第1の順位より高いこととしてもよい。
【0021】
好適な実施形態では、上記測位制御装置は、上記処理C)を実行するとき、上記処理C1)(S602−S607)と上記処理C2)(S608−S611)とを並行的に実行し、上記処理C1で取得されかつ前記誤測位の可能性が推定されない位置情報と、上記処理C2)で取得される位置情報のうち、いずれか先に取得された方を、前記現在位置情報として選択することとしてもよい(S620−S625、S621−S615)。
【発明の効果】
【0022】
本発明によれば、様々な場所でできるだけ移動体の正確な位置を測位することができる。
【0023】
また、受信感度の高いGPSセンサが位置を誤測位したときの悪影響を低減することができる。
【図面の簡単な説明】
【0024】
【図1】本発明の第1の実施形態に係る測位装置とそれに関連する移動体監視システムの構成を示す図である。
【図2】測位装置が有する制御部11の機能ブロックを示す図である。
【図3】移動体1から見たGPS衛星の仰角とマルチパス信号との関係を示す図である。
【図4】移動体1が高速移動中か否かを推定する処理のフローの一例を示す図である。
【図5】誤測位推定処理のフローの一例を示す図である。
【図6】時間の経過と共にGPS衛星6が移動することを示す図である。
【図7】第2の実施形態にかかる測位装置の構成を示す図である。
【図8】第2の実施形態における誤測位推定処理のフローの一例を示す図である。
【図9】第3の実施形態にかかる測位装置の構成を示す図である。
【発明を実施するための形態】
【0025】
以下、本発明の一実施形態に係る測位装置について、図面を参照して説明する。
(第1の実施形態)
【0026】
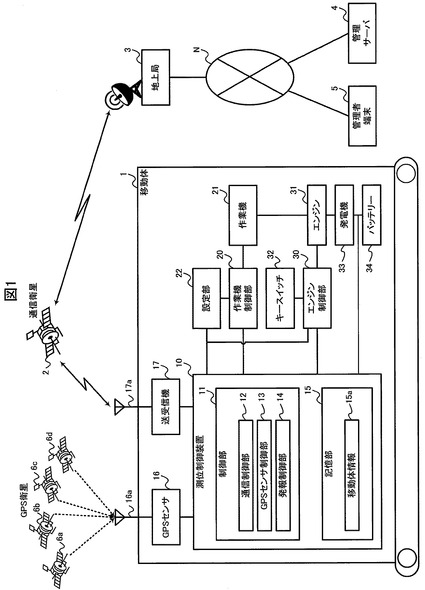
図1は、本発明の第1の実施形態に係る測位装置とそれに関連する移動体監視システムの構成を示す図である。
【0027】
図1に示されるように、少なくとも1つの移動体1が任意の地理的な場所に存在し、その移動体1と管理サーバ4とが通信衛星2、地上局3、及びインターネットなどの通信ネットワークNを介して相互通信可能に接続される。ネットワークNには、移動体1の管理者の端末である管理者端末5が接続される。移動体監視システムは、管理サーバ4と管理者端末5と移動体1を備える。移動体1は、移動体1の位置情報、稼働時間及び稼働状況などを示す移動体情報15aを通信衛星2を介して地上局3へ送信し、管理サーバ4が移動体情報15aを受信する。また、必要に応じて管理サーバ4あるいは管理者端末5から移動体1に対して、移動体1の各制御に用いられる制御プログラムなどの情報を通信衛星2を介して送信することもできる。
【0028】
移動体1は、油圧ショベルやホイールローダ、モータグレーダ、クレーン、ブルドーザ、ダンプトラック、フォークリフトといった、エンジンなどの動力源で走行装置を駆動させ、移動可能な建設機械や産業車両などである。また、移動体1は、測位制御装置10、GPSセンサ16及び無線送受信機17を有する。本実施形態にかかる測位装置は、測位制御装置10とGPSセンサ16とを含む。測位制御装置10は、GPSセンサ16及び無線送受信機17に接続される。GPSセンサ16は、アンテナ16aを有し、アンテナ16aを介して複数のGPS衛星6から送信された衛星信号(測位信号)を受信し、その信号をもとに、その移動体1の現在位置を演算し、その現在位置を示した自己位置情報212を出力する。測位制御装置10は、GPSセンサ16から上記自己位置情報212を取得する。無線送受信機17は、アンテナ17aを介して通信衛星2に通信可能に接続され、測位制御装置10と管理サーバ4との間のデータの送受信の処理を行う。
【0029】
移動体1は、本発明の恩恵を十分に受けるために、移動速度が比較的に低いもの、例えば、自走状態では5分間に1km以上も移動することが実質的にないようなものが好ましい。その典型例は、建設機械、或いは、歩行者(又は、歩行者により携帯される携帯通信端末)である。以下の説明では、移動体1が建設機械(例えば油圧ショベル)である場合を例にとる。この場合、移動体1は、バケットとブームおよびアームによって構成される作業機21を有し、作業機21は作業機制御部20によって制御される。また、移動体1は、エンジン31を有し、エンジン31はエンジン制御部30によって制御される。エンジン制御部30は、図示しないコモンレールによってエンジン31へ供給される燃料噴射量を調節しエンジン出力を制御するものであって、エンジンコントローラと称され、CPU(Central Processing Unit)などの数値演算装置である。エンジン31は、作業機21及び上部旋回体や下部走行体(走行パワートレイン)を駆動するための動力源であるとともに、発電機33を駆動する。なお、油圧ショベルの場合、作業機21には、上部旋回体や下部走行体も含まれる。作業機制御部20によって、上部旋回体の旋回制御や下部走行体の走行制御が行われる。移動体1が油圧ショベルである場合、エンジン31が油圧ポンプを駆動させ、油圧ポンプは、作業機21に備えられる油圧シリンダや上部旋回体や下部走行体の油圧モータに作動油を供給する。つまり、作業機制御部20は、油圧モータが吐き出す作動油の量を制御するものであってポンプコントローラと称され、CPUなどの数値演算装置である。発電機33は、バッテリー34に電気エネルギーを供給する。バッテリー34は電気エネルギーを蓄積して、移動体1内の様々な電装品、並びに、上述した測位制御装置10、GPSセンサ16及び無線送受信機17に駆動電力を供給する。測位制御装置10、GPSセンサ16及び無線送受信機17は、エンジン31が作動しているか停止しているかに関わらず、常時あるいは間欠的に、バッテリー34から電力を受けて作動し続ける。
【0030】
設定部22は、移動体1の操作者により操作されることで、測位制御装置10、作業機制御部20及びエンジン制御部30に対して各種の設定を行ったり、各種のコマンドを送ったり、また、測位制御装置10によって検出された移動体1の現在位置や、作業機21の状態や、エンジン31の状態などを操作者に表示するためのものである。典型的には、設定部22として、複数の押しボタンスイッチや液晶モニタあるいはタッチパネルで構成されるものを用いることができる。キースイッチ32は、操作者に操作されて、エンジンを始動/停止させたりする。典型的には、キーをキーシリンダに挿入し、回動させることでエンジン始動/停止の電気信号を発するものが用いられる。なお、キーの代わりにイモビライザーといった電子キーによって操作者を識別しエンジンの始動/停止を行うものであってもよい。
【0031】
測位制御装置10は、作業機制御部20およびエンジン制御部30に接続される。測位制御装置10は、制御部11と記憶部15を有する。測位制御装置10は、具体的には、CPUなどの数値演算装置やROM(Read Only Memory)やRAM(Random Access Memory)といった不揮発性記憶装置や揮発性記憶装置で構成される。制御部11は、通信制御部12とGPSセンサ制御部13と発報制御部14を有する。制御部11の通信制御部12は、作業機21及びエンジン31の状態並びに動作履歴などの稼働情報を取得する。通信制御部12は、また、発電機33の出力電圧の情報を取得し、エンジン31が稼動状態か停止状態かの稼働情報を取得する。また、通信制御部12は、GPSセンサ16から自己位置情報212を取得する。そして、通信制御部12は、それらの取得した情報を移動体情報15aとして記憶部15に記憶する。
【0032】
制御部11及びGPSセンサ16の詳細については、後述する。
【0033】
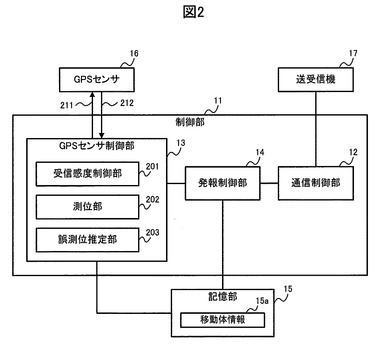
図2は、測位制御装置10に係る制御部11の機能ブロックを示す図である。
【0034】
制御部11は、GPSセンサ制御部13、発報制御部14、通信制御部12を有する。GPSセンサ制御部13は、GPSセンサ16に接続される。
【0035】
GPSセンサ16は、3つ、もしくは4つ以上のGPS衛星6からの衛星信号を受信し、上記複数の衛星信号の情報から、自己位置情報212となる経度、緯度、及び高度を算出する。
【0036】
GPSセンサ16は、本明細書で「高感度」及び「低感度」とそれぞれ呼ばれる2種類の衛星信号受信機能を有し、その2種類の衛星信号受信機能を選択的に切り替えて使用することができるように構成されている。ここで、「低感度」の衛星信号受信機能は、屋内での位置測定には使えないことがしばしがあるが、マルチパス信号の影響を受けることは殆どない。これに対し、「高感度」の衛星信号受信機能は、屋内での位置測定にも使えるが、マルチパス信号の影響を受けることがある。マルチパス信号の影響を受けていないときは、GPSセンサ16が受信した衛星信号によって実際の現在位置を実用的に正確に示した自己位置情報212を出力することができるが、マルチパス信号の影響を受けているときは、実際の現在位置から大幅に外れた(典型的には数km以上も外れた)位置を示す不正確な自己位置情報212を出力することが多い。「高感度」と「低感度」の区別は、例えば、現在位置の測定に使用される衛星信号の電力の大きさ(電波の強さ)又は受信強度を示す受信SN比の高さで区別することもできるし、現在位置の測定に使用される衛星信号の数(衛星の数)で区別することもできる。前者の区別の仕方によれば、例えば、比較的小さな電力値以上の範囲、例えばマイナスAAdBm以上(AAは数値)の範囲、の電力をもつ電波を位置測定に使用する場合を高感度と呼び、比較的大きな電力値以上の範囲、例えばマイナスAdBm以上(AはAAよりも小さな数値)の範囲、の電力をもつ衛星信号を使用する場合を低感度と呼ぶことができる。あるいは、例えば、比較的に低いSN比値以上の範囲の受信SN比をもつ衛星信号を現在位置の測定に使用する場合を高感度と呼び、比較的に高いSN比値以上の範囲の受信SN比をもつ衛星信号を使用する場合を低感度と呼ぶことができる。
【0037】
GPSセンサ16は、測位制御装置10から与えられる感度切替コマンド211に応答して、その2種類の衛星信号受信機能のいずれか一方を選択する。高感度と低感度の選択の具体的方法には、幾つかの方法が採用し得る。例えば、一つの方法によれば、GPSセンサ16は、アンテナ16aからGPSセンサ16に入力される衛星信号の中から、その電力値の大きさが所定の閾値より小さい信号を除去するフィルタ回路を有し、そのフィルタ回路が、感度切替コマンド211に応答して、前記閾値を大きい値(例えばマイナスAdBm)と小さい値(例えばマイナスAAdBm)に切り替える。そして、GPSセンサ16は、そのフィルタ回路を通過した衛星信号を制御部11のGPSセンサ制御部13に送信し、GPSセンサ制御部13は移動体1の現在位置を演算する。この場合、大きい値の閾値が選択されたときが低感度であり、小さい値の閾値が選択されたときが高感度である。
【0038】
別の方法によれば、GPSセンサ16は、例えばマイナスAAdBmのような或る電力値以上の電力をもつあらゆる衛星信号を受信し、それらの受信された衛星信号(例えば、12個のGPS衛星6からの衛星信号)の中から、受信された電力値の大きな順で第1位から所定順位までの衛星信号を選択する選択回路を有し、その選択回路が、感度切替コマンド211に応答して、上記所定順位を、低い順位(例えば第7位)と高い順位(例えば第4位)に切り替える。そして、GPSセンサ16は、その選択回路で選択された衛星信号を制御部11の測位部202に送信し、測位部11は移動体1の現在位置を演算する。この場合、低い順位が選択されたときが「高感度」であり、高い順位が選択されたときが「低感度」である。
【0039】
また別の方法によれば、通常、マルチパス信号の電力値は小さいので、GPSセンサ16は、複数のGPS衛星6からの衛星信号を受信できたとき、受信された衛星信号の電力値の大きい衛星信号の重み付けを大きくし、受信電力の小さい衛星信号の重み付けを小さくし、その重み付けを考慮して現在位置を演算する。これにより、受信された衛星信号の電力値の小さい衛星信号、すなわちマルチパス信号である可能性の高い衛星信号の影響を小さくすることができるので、より正確な現在位置を演算することができる。この場合、受信された衛星信号の電力に応じた重み付けの違いを感度切替コマンド211に応答して小さくしたり、大きくしたりすることができ、そして、重み付けの違いを小さくしたときが「高感度」であり、重み付けの違いを大きくしたときが「低感度」である。
【0040】
また別の方法によれば、GPSセンサ16は、アンテナ16aで受信可能な衛星信号の発信元のGPS衛星6の移動体1から見た仰角範囲を、感度切替コマンド211に応答して、広い角度範囲(所定の小さい角度以上の仰角範囲)と狭い角度範囲(所定の大きい角度以上の仰角範囲)とに選択的に切り替える。この場合、広い角度範囲が選択されたときが「高感度」であり、狭い角度範囲が選択されたときが「低感度」である。つまり、高い高度はもちろん、低い高度に位置するGPS衛星6からの衛星信号をも受信するのが「高感度」であり、高い高度に位置するGPS衛生6からの衛星信号を受信するのが「低感度」である。
【0041】
ここで、図3を参照する。図3は、移動体1から見たGPS衛星6の仰角とマルチパス信号との関係を示す図である。移動体1の周囲にある障害物520や521は、例えば高層ビルなどが想定される。移動体1から見て仰角の大きい(天頂方向に近い)方向にあるGPS衛星6bからの衛星信号500bは、移動体1のアンテナ16aに直接届きやすい。しかし、移動体1から見て仰角の小さい(水平方向に近い)方向にあるGPS衛星6cからの衛星信号500cは、障害物520に反射した後、アンテナ16aに届いてしまう可能性がより高い。すなわち、時々のGPS衛星6の位置や移動体1の周囲環境によって、GPSセンサ16は、仰角の比較的高いGPS衛星6bからよりも、仰角の比較的低いGPS衛星6cからマルチパス信号を受信してしまう可能性が高くなる。したがって、上記のようにGPSセンサ16を、仰角の比較的に高い衛星信号のみを受信する「低感度」に設定することで、仰角の比較的低いGPS衛星6cからの衛星信号500c、すなわちマルチパス信号を除去することができる。
【0042】
図2の説明に戻る。
【0043】
GPSセンサ制御部13は、受信感度制御部201と測位部202と誤測位推定部203を備える。
【0044】
測位部202は、GPSセンサ16から自己位置情報212を取得する。そして、測位部202は、取得された自己位置情報212の中から、誤測位でないと推定された自己位置情報212を選び、その選択された自己位置情報212を信頼できる自己位置情報として採用し、それを移動体情報15aの一部として記憶部15に記憶する。
【0045】
誤測位推定部203は、上記取得した自己位置情報202が、例えばマルチパス信号の影響によって誤測位であるか否かを推定する。誤測位とは、上記取得した自己位置情報212が、実際に移動体1が存在する位置と大きく乖離してしまう現象を言う。この現象は、前述の通り、GPSセンサ16を高感度に設定したことでマルチパス信号を受信してしまったときなどに発生する。なお、本実施形態において、誤測位の推定は、移動体1が高速移動中(例えば、移動体1がトラックに乗せられて運搬されているとき)には行われず、移動体1が高速移動中でないとき(例えば、移動体1が自走している又は停止しているとき)に行われる。その理由は、高速移動中は誤測位の推定処理の信頼性が低いからである。つまり、移動体1の現在位置として得られた自己位置情報が、移動体1が実際に高速移動している時の位置か、あるいは誤測位により得られた位置かは、トラックあるいは移動体1に速度センサといった移動を検知する補助手段を設けない限り、誤測位の推定が困難であるからである。なお、移動体1が高速移動中か否かの推定処理と、誤測位の推定処理については後述する。
【0046】
受信感度制御部201は、GPSセンサ16ができるだけマルチパス信号の影響を受けずに、できるだけ精度よく現在位置を演算できるようにするために、GPSセンサ16に対して感度切替コマンド211を与えてGPSセンサ16の衛星信号受信機能を高感度か低感度かに選択的に切り替える。
【0047】
発報制御部14は、定期的に(例えば毎日決められた時刻に)及び所定のイベント(例えば、エンジン31の始動と停止、所定の故障の発生、管理サーバから移動体情報15aの要求を受信した、移動体1が指定エリアに侵入又は退出した、など)が発生したときに、記憶部15に記憶されている移動体情報15aを、無線送受信機17を介して管理サーバ4側に送信する。
【0048】
図4は、移動体1が高速移動中か否かを推定する処理のフローの一例を示す図である。図4の処理フローは、その1周期での移動体1の位置変化が実用上必要とされる測位精度を損なわないような高速の周期(例えば1秒周期)で、繰り返し実行される。
【0049】
まず、測位部202は、GPSセンサ16から、自己位置情報212を取得する(S301)。この取得された最新の自己位置情報212を「p1」とする。
【0050】
次に、発報制御部14は、最終発報時の自己位置情報212を記憶部15から取得する。最終発報時とは、最も直近に移動体1から管理サーバ4あるいは管理者端末5に対して、移動体情報15aを送信した時を意味する。すなわち、最終発報時の自己位置情報212とは、その時に記憶部15に記憶されていた自己位置情報212のことである。この取得された最終発報時の自己位置情報212を「p0」とする。そして、発報制御部14は、p1とp0との差分距離を計算し、当該距離がXkm以上(Xは数値)か否かを判定する(S302)。なお、当該距離の閾値は、適宜に設定変更可能である。ここで、当該距離がXkm未満のときは(S302:No)、移動体1が高速移動中ではないと推定でき、制御は誤測位判定処理(S320)に進む。誤測位判定処理については、後述する。一方、当該距離がXkm以上のとき(S302:Yes)は、移動体1が高速移動中であると推定でき、制御ステップS303に進む。つまり、前回(最終発報時の自己位置情報)の位置と今回(最新の自己位置情報)の位置が大きく離れていることは、移動体1が短時間に移動したことであることを意味し、高速移行中であると推定するのである。
【0051】
ステップS303で、発報制御部14は、移動体1の高速移動が開始された場合に行われるべき発報処理を行う。具体的には、通信制御部12が、高速移動開始を示すフラグ及びステップS301で取得された自己位置情報p1等を含んだ移動体情報15aを管理サーバ4に送信する。
【0052】
次に、発報制御部14は、最終発報時の位置情報であるp0に、ステップS301で取得された自己位置情報p1を代入し、p0を記憶部15に記憶する(S304)。すなわち、p0は、移動体1が高速移動を開始したと推定された地点の位置情報に置き換えられる。
【0053】
次に、測位部202は、再びGPSセンサ16から自己位置情報212を取得する(S305)。この取得された自己位置情報212を「p2」とする。
【0054】
その後、発報制御部14は、p2とp1の間の距離を計算し、当該距離がYm未満(Yは数値)か否かを判定する(S306)。ここで、当該距離がYm以上のときは(S306:No)、移動体1はまだ高速移動中であると推定され、p1にp2を代入して(S330)、ステップS305に戻る。一方、当該距離がYm未満のときは(S306:Yes)、ステップS307に進む。なお、当該距離の閾値は、適宜に設定変更可能である。
【0055】
ステップS307で、発報制御部14は、タイマーをT分(Tは数値)にセットする。そして、そのタイマーがT分を経過したか否かを判断し、タイマーがT分を経過しているときは、ステップS311に進む。なお、ここでセットしたタイマーの値は、適宜に設定変更可能である。
【0056】
上記タイマーがまだT分を経過してなければ、次に、発報制御部14は、再びGPSセンサ16から自己位置情報212を取得する(S308)。この取得された自己位置情報212を「p3」とする。
【0057】
次に、発報制御部14は、p3とp2の間の距離を計算し、当該距離がZm未満(Zは数値)か否かを判定する(S309)。ここで、当該距離がZm以上のときは(S309:No)、移動体1はまだ高速移動中であると推定され、p1にp3を代入して(S331)、ステップS305に戻る。一方、当該距離がZm未満のときは(S309:Yes)、すでにセットされているタイマーをチェックするために(S310)、ステップS307に戻る。なお、当該距離の閾値は、適宜に設定変更可能である。また、ステップ306およびステップ309で用いた閾値のYmとZmは、同一値でも異なる値でもよい。
【0058】
次に、ステップS307でタイマーがT分を経過した後の処理について説明する。この場合、p3とp2の間の距離がZm未満の状態がT分以上続いたので、移動体1は高速移動を終了したと推定され、発報制御部14は、高速移動終了の場合に行われるべき発報処理を行う(S311)。具体的には、通信制御部12が、移動停止を示すフラグ及び取得された最新の自己位置情報p3等を含む移動体情報15aを管理サーバ4に送信する。
【0059】
次に、発報制御部14は、p0に最終発報時の自己位置情報212であるp3を代入し、p3を記憶部15に記憶する(S312)。その後、制御は最初のステップS301に戻る。
【0060】
上述の処理により、誤測位判定処理が、移動体1が高速移動をしてないと推定されたときのみ実行されることとなる。
【0061】
なお、上述の処理では、移動体1の高速移動開始及び終了の推定を異なる時点での自己位置情報212の差分距離である移動距離に基づいて行っているが、他の方法で推定してもよい。例えば、エンジン31が稼働中か停止中かという情報(例えば、エンジン31の出力軸に取り付けた回転速度センサから出力される電気信号やエンジン31とともに駆動する発電機33から出力される電気信号)も、高速移動の推定に利用してもよい(典型的には、エンジン31が稼働中であれば、高速移動中、特にトレーラやトラックによる運搬中、ではないと推定できる)。
【0062】
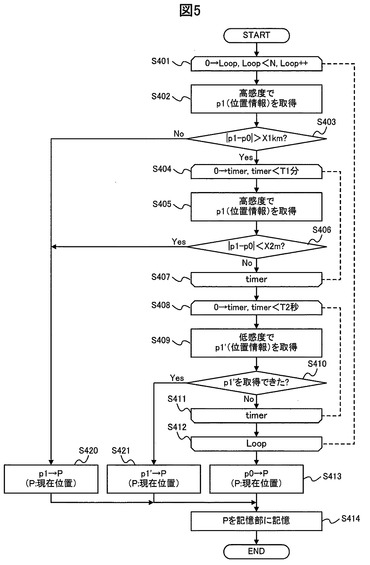
図5は、誤測位推定処理のフローの一例を示す図である。図5の処理フローは、その1周期での移動体1の位置変化が実用上必要とされる測位精度を損なわないような高速の周期(例えば1秒周期)で、繰り返し実行される。
【0063】
まず、誤測位推定部203は、ループカウンタに「N(Nは数値)」をセットする(S401)。ここで、当該ループカウンタがN以上のときは、ステップS413に進む。なお、ここでセットしたループカウンタの値は、適宜に設定変更可能である。ここでループカウンタをセットしている理由及び、以降でタイマーをセットしている理由については後述する。
【0064】
次に、誤測位推定部203は、受信感度制御部201から感度切り替えコマンド211をGPSセンサ16に与えることでGPSセンサ16を高感度に設定し、GPSセンサ16から測位部202を介して高感度での自己位置情報212を取得する(S402)。このステップ402の機会に取得された自己位置情報を「p1」とする。
【0065】
次に、誤測位推定部203は、p1とp0(最終発報時の位置情報)の差分距離を計算し、当該距離がX1km以上(X1は数値)か否かを判定する(S403)。ここで、当該距離がX1km以上のとき(S403:Yes)は、マルチパス信号の影響による誤測位が生じている可能性があり、制御はステップS404に進む。一方、当該距離がX1km未満のとき(S403:No)は、マルチパス信号の影響による誤測位は生じてないと推定され、制御はステップS420に進む。なお、当該距離の閾値は、適宜に設定変更可能である。
【0066】
上記のようにマルチパス信号の影響による誤測位の可能性があるとして、制御がステップS404に進むと、誤測位推定部203は、タイマーをT1分(T1は数値)にセットし、そして、そのタイマーが、T1分を経過してないかチェックする。ここで、そのタイマーがT1分を経過しているときは、制御はステップS408に進む。なお、ここでタイマーにセットされたT1分という時間長は、一旦マルチパス信号の影響による誤測位が生じたとしても、その時間長が経過するまでの間に、GPS衛星6が衛星軌道上を移動することでマルチパス信号の発生が解消されて、正しい測位ができるようになる、と期待される時間長である。このT1分という値は、適宜に設定変更可能である。
【0067】
ステップS404でタイマーがまだT1分を経過してなければ、次に、誤測位推定部203は、受信感度制御部201を介してGPSセンサ16を高感度に設定し、GPSセンサ16から測位部202を介して高感度での自己位置情報212を取得する(S405)。このステップS405の機会に取得された自己位置情報212を改めて「p1」とする。
【0068】
次に、誤測位推定部203は、p1とp0の差分距離を計算し、当該差分距離がX2m未満(か否か
X2は数値)を判定する(S406)。ここで、当該差分距離がX2m以上のとき(S406:No)は、マルチパス信号の影響による誤測位の可能性が否定されないので、さらに待つために(S407)、ステップS404に戻る。一方、当該距離がX2m未満のときは(S406:Yes)、マルチパス信号の影響による誤測位の可能性が否定されると推定されるので、制御はステップS420に進む。なお、当該差分距離の閾値は、適宜に設定変更可能である。
【0069】
次に、ステップS404でタイマーがT1分(T1は数値)経過した後の処理について説明する。この場合、T1分が経過してもまだなお、高感度の測位についてマルチパス信号の影響による誤測位の可能性が続いていると推定され、制御はステップS408に進み、ここで誤測位推定部203は、タイマーをT2秒(T2は数値)にセットし、そのタイマーがT2秒を経過したか否かをチェックする。ここで、セットしたタイマーがT2秒を経過したときは、まだ正しいと推定される自己位置情報212が得られてないことを意味する。この場合、制御はステップS412に進み、ステップS401から次の回のループが開始される。なお、ここでタイマーにセットしたT2秒という時間長は、マルチパス信号の影響の少ない低感度での測位を一時的に行うための時間長であり、かつ、その時間長程度の短い時間だけ一時的に低感度測位を行なうことは、高感度での測位を行うことの利点(衛星信号のどれもが微弱な電力であるような環境(例えば室内)であっても、測位ができる可能性が高い)に実用上の悪影響を与えないという、短い時間である。このT2秒という値は、適宜に設定変更可能である。
【0070】
ステップS408でT2秒がまだ経過してなければ、次に、誤測位推定部203は、受信感度制御部201からGPSセンサ16に感度切り替えコマンド211を送ることでGPSセンサ16を低感度に設定し、GPSセンサ16から測位部202を介して低感度での自己位置情報212の取得を試みる(S409)。このS409の機会に取得された低感度での自己位置情報212が取得されたならば、その自己位置情報212を「p1’」とする。
【0071】
次に、誤測位推定部203は、p1’を取得できたか否かを判定する(S410)。すなわち、低感度で測位が行えたか否かを判定する。低感度では、移動体1の場所(周囲環境)や時間により、GPS衛星6から送信される、測位のために必要な数の衛星信号が受信できないために測位ができない場合がある。ここで、自己位置情報212のp1’を取得できたときは(S410:Yes)、その取得されたp1’が信頼できる自己位置情報212であると推定され、制御はステップS421に進む。一方、p1’を取得できなかったときは(S410:No)、タイマーがT2秒を経過する前に、再度、低感度での自己位置情報212を取得するために(S411)、制御はステップS408に戻る。
【0072】
次に、ステップS408でタイマーがT2秒経過した後の処理について説明する。この場合、低感度での測位もできなかったことになり、誤測位推定部203は、次の回のループを繰り返すために(S412)、ステップS401に戻る。
【0073】
次に、ステップS401でループカウンタがN以上(Nは数値)になった後の処理について説明する。この場合、N回のループを繰り返して合計Ttotal分間(Ttotal=ΣTloop(n) n=1〜N)の測位を試みたが、高感度及び低感度のいずれにおいても信頼できる自己位置情報212が取得できなかったことを意味する。Tloop(n)は、一回のループに要する時間であって、ループは、最大で予め設定されているループの回数(N)まで実行される。したがって、ループが最大N回実行されたならば、合計Ttotalの時間は、ループが1〜Nまで実行された合計時間となる。この場合、誤測位推定部203は、次善の策として、最終発報時の自己位置情報212であるp0を、移動体1の現在位置を示す自己位置情報212(P)として採用し(S413)、Pを記憶部15に記憶する(S414)。
【0074】
ここで、ステップS403の判定が「No」、又はステップS406の判定が「Yes」のときの処理について説明する。これらの判定は、高感度での測位がマルチパス信号による影響を受けずに正常にできた(ステップS403でNo)、または、一時的にマルチパス信号による影響を受けたようだが、後にそれが解消して高感度で正確な測位ができた(ステップS406でYes)と推定される場合を意味する。これらの場合、誤測位推定部203は、取得された高感度での自己位置情報212(p1)を、移動体1の現在位置を示す自己位置情報212(P)として採用し(S420)、Pを記憶部15に記憶する(S414)。
【0075】
次に、ステップS410の判定が「Yes」のときの処理について説明する。この判定は、高感度で測位した自己位置情報212(p1’)は誤測位の可能性があるが、低感度で測位した位置情報p1’は(低感度での測位はマルチパス信号の影響をほとんど受けないので)信頼できると推定される場合を意味する。この場合、誤測位推定部203は、取得された低感度の自己位置情報212(p1’)を、移動体1の現在位置を示す自己位置情報212(P)として採用し(S421)、Pを記憶部15に記憶する(S414)。
【0076】
なお、記憶部15に記憶されたPは、例えば、移動体情報15aの一つとして、予め設定された日々の定時時刻に管理サーバ4や管理者端末5に対して送信(定時発報)され、移動体1の稼動状況の管理や管理者(例えば、サービスマン)によるメンテナンス作業の計画管理などに用いられる。また、記憶されたPは、管理サーバ4や管理者端末5からの要求に応じて、任意の時刻に移動体1から管理サーバ4や管理者端末5に送信されてもよい。
【0077】
上述のように、GPSセンサ制御部13は、基本的に高感度での測位結果を採用するが、高感度の測位結果にマルチパス信号の影響による誤測位の可能性が推定された場合、GPS衛星6の衛星軌道上の位置が変化してマルチパス信号の影響が解消されると期待される時間の間、高感度で再測位を試み、それでも誤測位の可能性が解消されなければ、一時的に低感度で再測位を試み、そして、この2種類の再測位のシーケンスを、必要に応じて何度か繰り返して、信頼できる測位結果を取得しようとする。これにより、GPSセンサ制御部13は、高感度での測位の利点を生かしつつ、高感度での測位の弱点を抑制して、できるだけ正確な移動体1の自己位置情報212を取得することができる。
【0078】
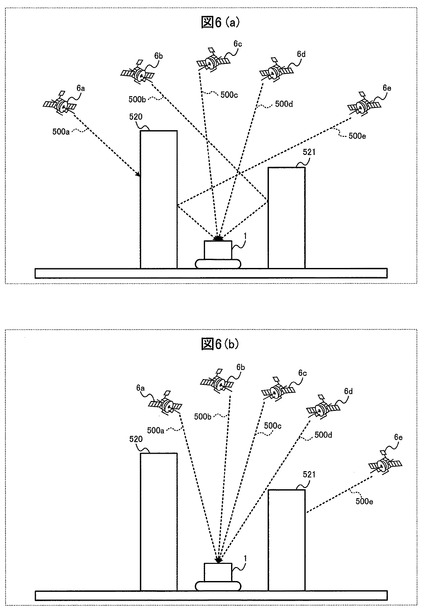
図6は、時間の経過と共にGPS衛星6が移動することを示す図である。
【0079】
図6(a)は、ある時刻におけるGPS衛星6の位置を示す図である。
【0080】
移動体1の自己位置情報212を正確に測位するためには、移動体1はGPS衛星6からの衛星信号を4つ以上受信する必要がある。しかし、図6(a)では、GPS衛星6aからの衛星信号500aは障害物520に阻まれ移動体1に到達せず、GPS衛星6b及び6eからの衛星信号500b、500eは障害物520あるいは521に反射し、マルチパス信号として移動体1に到達してしまう。そのため、移動体1は少なくとも4つのGPS衛星6b、6c、6d及び6eからの衛星信号500b、500c、500d及び500eを受信するが、正確な自己位置を測定(測位)することができない。
【0081】
図6(b)は、図6(a)からある時間が経過した後のGPS衛星6の位置を示す図である。
【0082】
GPS衛星6は衛星軌道上を周回しているため、時間が経過すると移動体1に対するGPS衛星6の位置は移動する。図6(b)では、GPS衛星6が移動したため、移動体1は少なくとも4つのGPS衛星6a〜6dからの衛星信号500a〜500dを正常に直接受信して、自己位置を正確に測定(測位)することができる。
【0083】
すなわち、ある時刻に自己位置が正確に測定(測位)できなかったとしても、ある時間(例えば1〜数分)が経過すると、GPS衛星6が移動し、正しく自己位置が測定(測位)できるようになる可能性がある。
【0084】
そこで上記の第1の実施形態は、図5のフローチャートに示したように、移動体1が、高感度での自己位置の測定(測位)ができなかった場合、又は行われた高感度での測位に誤測位の疑いがあった場合は、その後に第1の所定時間(例えばT1分)が経過するまでの間(つまり、GPS衛星が上記の問題が解消する位置へ移動すると期待される時間の間)、高感度で再度測位するようにしている。
【0085】
また、第1の実施形態では、このようにして移動体1が高感度で自己位置の測定(測位)を繰り返した後、まだなお正確な測位ができなかった疑いがある場合には、上述した第1の所定時間(例えばT1分)より短い第2の所定時間の間(例えばT2秒)に限って、一時的に低感度での自己位置の測定(測位)を行う。これにより、高感度での測位という基本機能の利点を実質的に最大限に生かしつつ、その弱点を補って、より正確な測位が可能である。ところで、本実施形態の変形例として、高感度での自己位置の測定(測位)に上記のような問題が生じた場合、先に上記のような低感度での測位を行い、それでもなお問題があった場合には、上記のような高感度での再度の測位をするような処理の順序にしてもよい。この場合、低感度で自己位置情報212が取得できた場合は、その自己位置情報212を信頼できる自己位置情報212として採用し、そうでなかった場合は、次に高感度で測位を行う。そして、その高感度での自己位置情報212の測位では、図5のステップS402〜S407に示すように、誤測位の推定を行い、測位した自己位置情報212が誤測位でないと推定した場合は、その自己位置情報212を現在の位自己置情報212として採用してもよい。
(第2の実施形態)
【0086】
次に、第2の実施形態に係る測位装置について説明する。
【0087】
図7は、第2の実施形態にかかる測位装置の構成を示す。
【0088】
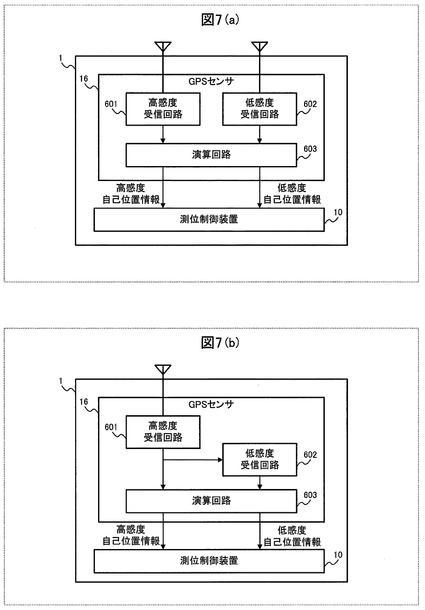
図7に示されるように、第2の実施形態にかかる測位装置は、移動体1に搭載され、GPSセンサ16と測位制御装置10とを有する。この測位装置は、高感度と低感度の測位を同時並行的に行うように構成されている。すなわち、この測位装置のGPSセンサ16は、高感度の衛星信号受信機能と低感度の衛星信号受信機能とを同時並行的に使用して、高感度での自己位置情報と低感度での自己位置情報の双方を同時並行的に出力できるように構成されている。例えば、図7(a)又は図7(b)に示すように、GPSセンサ16は、高感度の衛星信号受信機能を行う高感度受信回路601と、低感度の衛星信号受信機能を行う低感度受信回路602(これは、図7(a)に示されるように高感度受信回路601から独立したものであっても、あるいは、図7(b)に示されるように高感度受信回路601で受信された衛星信号の中から電力又は仰角などに基づいて比較的に信頼性の高い一部の衛星信号だけを選び出すものであってもよい)と、これら高感度と低感度の受信回路601と602でそれぞれ受信された衛星信号を用いて高感度での自己位置情報と低感度での自己位置情報の双方を算出して並行的に出力する演算回路603とを有している。
【0089】
また、この測位装置の測位制御装置10は、図2に示すような構成をもち、図4に示した高速移動中か否かの推定処理を行い、そして、高速移動中でないと推定されたときにだけ誤測位推定処理を行う点では、第1の実施形態の場合と共通する。しかし、第1の実施形態の場合と異なる点は、この測位制御装置10が、GPSセンサ16から高感度での自己位置情報と低感度での自己位置情報を並行的に取得して、以下に説明する誤測位推定処理を行うように構成されている点である。
【0090】
図8は、第2の実施形態における誤測位推定処理のフローの一例を示す図である。
【0091】
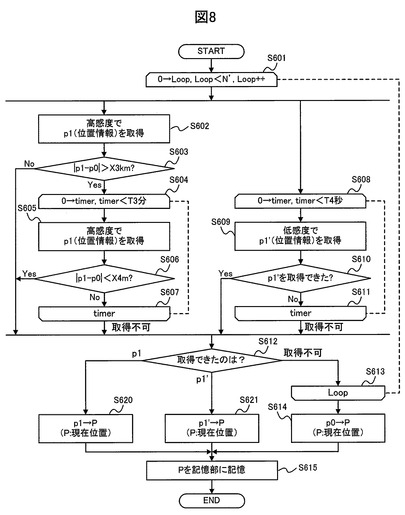
まず、誤測位推定部203は、ループカウンタに「N’」(N’は数値)をセットする。ここで、当該ループカウンタがN’以上のときは、ステップS614に進む。なお、ここでセットしたループカウンタの値は、適宜に設定変更可能である。
【0092】
次に、誤測位推定部203は、a)高感度における測位と、b)低感度における測位との並列処理(両方の測位を同時並行的に行う処理)を開始する。
【0093】
まずは並列処理のa)高感度における測位について以下に説明する。
【0094】
誤測位推定部203は、図8のステップS602〜S607において、移動体1の高感度での位置情報を取得する。この処理は、基本的に図5のステップS402〜S407の処理と同様の処理である。
【0095】
ただし、ステップS603の条件分岐において、ステップS602で取得された自己位置情報「p1」と最終発報時の位置情報「p0」の差分距離がX3km未満(X3は数値)であったときは(S603:No)、「p1」にマルチパス信号の影響による誤測位は生じていないと推定され、制御はその「p1」を保持してステップS612に進む。
【0096】
さらに、ステップS606の条件分岐において、ステップS605で改めて取得された自己位置情報「p1」と最終発報時の位置情報「p0」の差分距離がX4m未満(X4は数値)となったときは(S606:Yes)、その「p1」はマルチパス信号の影響による誤測位の可能性が解消されたと推定され、制御はステップS604〜S607のタイマーのループを抜けて、その「p1」を保持してステップS612に進む。
【0097】
また、ステップS604〜S607のループのタイマーにセットされたT3分間(T3は数値)の間に誤測位の可能性が解消されなかったと推定されたときは、制御は「位置情報の取得不可」という情報を保持してステップS612に進む。
【0098】
次に、並列処理のb)低感度における測位について以下に説明する。
【0099】
誤測位推定部203は、図8のステップS608〜S611において、移動体1の低感度での位置情報を取得する。この処理は、基本的に図5のステップS408〜S411の処理と同様の処理である。
【0100】
ただし、ステップS610の条件分岐において、ステップS609で低感度での位置情報「p1’」を取得できたときは(S610:Yes)、制御はステップS608〜S611のタイマーのループを抜けて、その「p1’」を保持してステップS612に進む。
【0101】
また、ステップS608〜S611のループのタイマーにセットされたT4秒間(T4は数値)の間に低感度での位置情報を測位できなかったときは、制御は「位置情報の取得不可」という情報を保持してステップS612に進む。
【0102】
以上により、a)高感度による測位と、b)低感度による測位の並列処理を終了する。
【0103】
次に、並列処理終了後の処理(ステップS612以降の処理)について説明する。
【0104】
誤測位推定部203は、上記の並列処理において、a)高感度の測位と、b)低感度の測位のいずれか早く測位できた方の自己位置情報を取得し、どちらの受信感度で測位できたかを判定する(S612)。その判定の結果、高感度で測位された「p1」が最初に取得されたときは(S612:p1)、その「p1」を現在位置情報Pとして採用し(S620)、低感度で測位された「p1’」が最初に取得されたときは(S612:p1’)、その「p1’」を現在位置情報Pとして採用する(S621)。高感度でも低感度でも「位置情報の取得不可」だったときは(S612:取得不可)、ループの開始点であるステップS601に戻る(S613)。なお、ステップS601〜S613のループを所定の回数繰り返しても(すなわち、所定の時間測位を繰り返しても)、高感度でも低感度でも正しいと推定される位置情報が測位できなかったときは、次善の策として、p0(最終発報時の位置情報)を現在位置情報Pとして採用する(S614)。
【0105】
最後に、Pを記憶部15に記憶して(S615)、当該処理を終了する。
【0106】
これにより、第1の実施形態と同じ効果をより短時間で得ることができる。以下、その理由について説明する。
【0107】
上記のa)高感度の測位において、最初の測位(S602)で誤測位の可能性が低い自己位置情報が測位できたときは、すぐにステップS612に進む。また、最初の測位(S602)で誤測位の可能性が高い自己位置情報が測位されたときは、T3分のタイマーがセットされ、その間繰り返し測位が行われる。そして、誤測位の可能性が低い自己位置情報を測位できた時点でタイマーのループを抜け、ステップS612に進む。
【0108】
一方、上記のb)低感度の測位では、T4秒のタイマーがセットされ、位置情報が測位された時点でタイマーのループを抜け、ステップS612に進む。
【0109】
したがって、高感度ですぐに誤測位の可能性の低い自己位置情報が測位され、低感度でもすぐに自己位置情報が測位された場合は、どちらも誤測位の可能性が低いので、ステップS612において、いずれの自己位置情報が先に取得されても問題ないと推定される。
【0110】
また、高感度の最初の測位において誤測位の可能性の高い自己位置情報が測位され、高感度で繰り返し測位がなされている間に、低感度ですぐに位置情報が測位された場合は、ステップS612においては、低感度で測位された自己位置情報が先に取得されることになるので、これも誤測位の可能性が低いと推定される。
【0111】
また、低感度では測位されず、高感度でのみ測位されたときは、ステップS612においては、高感度で測位された自己位置情報が先に取得される。この高感度で測位された自己位置情報は、ステップS606において誤測位の可能性が解消されたと推定された位置情報なので、これも誤測位の可能性が低いと推定される。
【0112】
以上のように、高感度と低感度の測位を並列に行うことにより、第1の実施形態と同じ効果をより短時間で得ることができる。
(第3の実施形態)
【0113】
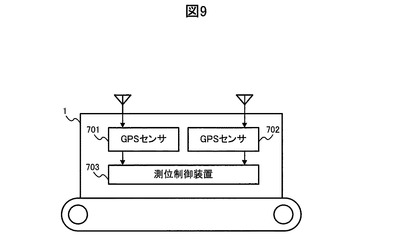
第3の実施形態にかかる測位装置について説明する。図9は、第3の実施形態にかかる測位装置の構成を示す。
【0114】
図9に示されるように、第3の実施形態にかかる測位装置は、移動体1に搭載され、そして、移動体1の異なる場所に設けられた複数、例えば2つ、のGPSセンサ701と702と、それら2つのGPSセンサ701と702に接続された測位制御装置703を備える。それぞれのGPSセンサ701と702は、第1又は第2の実施形態で用いられたGPSセンサ16と同様の構成と機能を有し、互いに独立して動作する。
【0115】
測位制御装置703は、2つのGPSセンサ701と702のそれぞれから自己位置情報を取得する。測位制御装置703は、移動体1が高速移動中か否かを図4に示したような方法で推定し、そして、移動体1が高速移動中でないと推定されているときにだけ、以下の方法によって誤測位の推定処理を行う。
【0116】
この誤測位推定処理は、1つのGPSセンサ701から取得された自己位置情報と、別のGPSセンサ702から取得された自己位置情報の双方に基づいて行われる。その具体的なやり方の一例は以下の通りである。
【0117】
まず、GPSセンサ701及び702の双方から高感度での自己位置情報を取得し、取得された自己位置情報について、誤測位の可能性を推定する。その結果、GPSセンサ701及び702の少なくとも一方から取得された高感度での自己位置情報が、誤測位の可能性がないと推定されたなら、その少なくとも一方から取得された高感度での自己位置情報を、移動体1の現在位置を示す現在位置情報Pとして採用する。なお、誤測位の可能性の推定のやり方としては、第1又は第2の実施形態で説明した処理と同様に、最終発報時の現在位置情報Pとの差分距離をチェックするやり方でもよいし、あるいは、GPSセンサ701及び702の双方から取得された自己位置情報間の差分距離をチェックするやり方でもよい。
【0118】
GPSセンサ701及び702の双方からの高感度での自己位置情報について、誤測位の可能性があると推定されたときには、続いて次のような処理を行う。すなわち、GPSセンサ701及び702の各々について、高感度での自己位置情報の再取得を試みる処理と、低感度での自己位置情報の取得を試みる処理とを、逐次的又は並行的に行う。この場合、GPSセンサ701及び702の双方について同様の処理を行ってもよいし、互いに異なる処理(例えば、一方の、高感度での自己位置情報の再取得を試み、他方のGPSセンサ702からは、低感度での自己位置情報の取得を試みる)。その結果、GPSセンサ701及び702の少なくとも一方から、信頼できる自己位置情報が取得できれば、それを現在位置情報Pとして採用する。
【0119】
上記以外に様々な誤測位推定処理が採用できるが、いずれにしても、さまざまな変形例として、一方のGPSセンサ701は少なくとも高感度の衛星信号受信機能を有して、それを用いて高感度での自己位置情報を出力し、他方のGPSセンサ702は少なくとも低感度の衛星信号受信機能を有して、それを用いて低感度での自己位置情報を出力し、その高感度と低感度の自己位置情報を用いて、図5又は図8に示された誤測位処理を行うようにしてもよい。
【0120】
ここで、GPSセンサ701及び702は移動体1上の、お互いにできるだけ遠く離れた位置に設置することが好ましい。離れた位置とは、水平方向でも垂直方向でもよい。それにより、GPSセンサ701及び702の双方が同じマルチパス信号の影響を受ける可能性を低くできるからである。
【0121】
変形例として、この測位装置が持つGPSセンサの数は3つ以上であってもよい。その場合、いずれかのGPSセンサが低感度で測位できたときは、その自己位置情報を現在位置情報Pとして採用できる。一方、いずれのGPSセンサでも高感度でしか測位できなかった場合は、例えば次のようにして現在位置情報Pを決めることができる。すなわち、所定の半径内に、所定の個数以上のGPSセンサからの位置情報が収まっている場合は、その半径の中心の位置を現在位置情報Pとし、そうでない場合は、誤測位の可能性が高いと判断して、再度位置情報を取得する。
【0122】
上記以外に様々な誤測位推定処理が採用できるが、いずれにしても、第3の実施形態にかかる測位装置は、要するに次のように構成されているといえる。すなわち、この測位装置は、少なくとも高感度の衛星信号受信機能を有して、それを用いて高感度での自己位置情報を出力する第1のGPSセンサ701と、少なくとも低感度の衛星信号受信機能を有して、それを用いて低感度での自己位置情報を出力するGPSセンサ702と、それら複数のGPSセンサ701及び702から高感度と低感度の自己位置情報を取得する測位制御装置703とを備える。測位制御装置703は、取得された高感度と低感度の自己位置情報を使用して、例えば図5又は図8に示された誤測位処理を行うことで、移動体1の現在位置を測定(測位)する。
【0123】
上述した本発明の実施形態は、本発明の説明のための例示であり、本発明の範囲をそれらの実施形態にのみ限定する趣旨ではない。移動体1は、建設機械や産業車両であってもよいが、GPSセンサを備えた他の車両にも適用可能である。また、走行装置を備えないが、地面に固定されずに他の荷役車両などによって移設されるようなGPSセンサを備えた発電機などの産業機械などにも、その現在位置を取得する必要がある場合に適用できる。当業者は、本発明の要旨を逸脱することなしに、他の様々な態様で本発明を実施することができる。例えば、本発明ならびに上述の実施形態及びその他の実施形態において、GPSに代えて又はそれと組み合わせて、GPS以外の航法衛星システムを採用することもできる。
【符号の説明】
【0124】
1…移動体 6…GPS衛星 10…測位制御装置 11…制御部 12…通信制御部
13…GPSセンサ制御部 14…発報制御部 15…記憶部 16…GPSセンサ
17…送受信機 201…受信感度制御部 202…測位部 203…誤測位推定部
【技術分野】
【0001】
本発明は、航法衛星システムを使用した移動体の位置の測位に関する。
【背景技術】
【0002】
従来から、建設機械などの移動体を監視するために、移動体に通信端末装置を搭載し、この通信端末装置から移動体の位置、稼働状況、コンディションなどの移動体情報を管理装置側に送信し、管理装置では、この移動体情報をもとに定期整備部品の交換や異常発生を迅速に管理者側に通知し、適切かつ迅速な処置が施せるようにした移動体管理システムが実現されている。
【0003】
ここで、移動体の位置の測位には、GPS(Global Positioning System)又はGLONASS(Global Navigation Satellite System)等の航法衛星システム(Navigation Satellite System)が使用されている。以下、航法衛星システムに関して便宜的にGPSを例にとり説明するが、以下の説明はGPS以外の航法衛星システムについても同様にあてはまる、又は将来あてはまることになるであろう。
【0004】
近年、技術の進歩によって、GPS衛星からの衛星信号(測位信号あるいは測距信号とよばれる信号)を受信するGPSセンサの受信感度を高くすることができるようになった。これにより、例えば、建物の中など、GPS衛星からの信号強度が弱い場所でも、GPSセンサが信号を受信できるようになった。
【0005】
しかし、GPSセンサが弱い信号も受信できてしまうために、反射波の信号(いわゆるマルチパス信号)等も受信してしまい、誤った位置を測位してしまうという問題がある。そのため、この問題を解決する手段が種々提案されている。
【0006】
例えば、特許文献1では、マルチパスの発生しやすい場所を予め地図情報に登録しておき、自車の現在位置がマルチパスの発生しやすい場所であるか否かに基づき、位置を測位する際の条件を変えている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−264076号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、建設機械などが使用される作業現場は、都市部だけでなく、山奥、僻地、発展途上の海外など、特許文献1のように必ずしも地図が正確に存在する場所とは限らない。しかも、そのような場所は、携帯電話の信号が届かず、携帯電話での測位で一般的に行われている携帯電話の信号による位置の補正などが不可能な場合も多い。
【0009】
したがって、建設機械などは、GPSセンサが受信する衛星信号のみから、できるだけ正確な位置を測位する必要がある。しかし、前述の通り、受信感度の高いGPSセンサは、マルチパス信号等の影響により、時々位置を誤って測位(以下「誤測位」)してしまうという問題がある。一方で、受信感度の低いGPSセンサでは、信号強度の弱い場所では測位ができないという問題がある。
【0010】
そこで、本発明の目的は、様々な場所でできるだけ正確な移動体の位置を測位できるようにすることである。
【0011】
また、本発明の別の目的は、受信感度の高いGPSセンサが位置を誤測位したときの悪影響を低減することである。
【課題を解決するための手段】
【0012】
本発明の測位装置は、移動体(1)に搭載され、移動体の位置を測定する測位装置(10と16)であって、
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度と低感度の衛星信号受信機能を有し、高感度の衛星信号受信機能を使って演算された高感度での位置情報と、低感度の衛星信号受信機能を使って演算された低感度での位置情報とを、選択的に又は並行的に出力する航法衛星センサ(16)と、
航法衛星センサから高感度での位置情報と低感度での位置情報とを選択的に又は並行的に取得して、高感度での位置情報と低感度での位置情報のいずれか一方を、移動体の現在位置を示す現在位置情報として選択する測位制御装置(10)と、を備え、
測位制御装置は、以下の処理A)からD)、
A)衛星航法センサから高感度での位置情報を取得して、取得された高感度での位置情報に誤測位の可能性があるか否か推定し(S402−S403、S603−S603)、
B)処理A)で誤測位の可能性が推定されないときには、取得された高感度での位置情報を、現在位置情報として選択し(S420、S620)、
C)処理A)で誤測位の可能性が推定されたときには、その後に、
C1)第1の所定時間の間の1回以上の機会に、衛星航法センサから高感度での位置情報を再取得して、再取得された高感度での位置情報に誤測位の可能性があるか否か推定する第1の処理と(S404−S407、S604−S607)、
C2)第2の所定時間の間の1回以上の機会に、衛星航法センサから低感度での位置情報の取得を試みる第2の処理と(S408−S411、S608−S611)、
を逐次的にまたは並行的に行い、
D)処理C1)で第1の所定時間の間の或る第1の機会に誤測位の可能性が推定されなかったならば、第1の機会に再取得された高感度での位置情報を、現在位置情報として選択し(S420−S414、S620−S615)、処理C2)で第2の所定時間の間の或る第2の機会に低感度での位置情報が取得されたならば、第2の機会に取得された低感度での位置情報を、現在位置情報として選択する(S421−S414、S621−S615)を実行する。
【0013】
好適な実施形態では、上記測位制御装置は、上記処理A)を実行するとき、上記処理A)で取得された高感度での位置情報と最近過去に実行された上記処理D)で出力又は記憶された過去の位置情報との間の距離を算出し、算出された距離に基づいて、誤測位の可能性があるか否かを推定してもよい。
【0014】
好適な実施形態では、上記第2の所定時間が上記第1の所定時間より短いこととしてもよい。
【0015】
好適な実施形態では、上記測位制御装置は、上記処理C)を実行するとき、最初に上記処理C1)を実行し(S404−S407)、 最初に実行された上記処理C1)で全ての機会に誤測位の可能性が推定されたならば(S406でNo)、上記処理C2)を実行し(S408−S411)、そうでなければ(S406でYes)、上記処理C2)の実行を省略することとしてもよい。
【0016】
好適な実施形態では、上記測位制御装置は、上記処理C)を1回実行した結果、上記処理C1)で全ての機会に誤測位の可能性が推定され(S406でNo)、かつ上記処理C2)ですべての機会に低感度での位置情報が取得できなかったならば(S410でNo)、上記処理C)を再度実行することとしてもよい(S401、S412)。
【0017】
好適な実施形態では、上記測位制御装置は、上記処理C)を所定のループ回数まで繰り返した結果、まだなお、上記処理C1)で全ての機会に誤測位の可能性が推定され、かつ上記処理C2)ですべての機会に低感度での位置情報が取得できなかったならば、最近過去に実行された上記処理D)で選択された過去の位置情報を、再度、現在位置情報として選択することとしてもよい(S413−S414)。
【0018】
好適な実施形態では、航法衛星センサの高感度の受信機能は、所定の第1の電力値又はSN比値より大きい又は高い電力又は受信SN比をもつ衛星信号のみを測位に使用し、低感度の受信機能は、所定の第2の電力値又はSN比値より大きい又は高い電力又は受信SN比をもつ衛星信号のみを測位に使用し、第2の電力値又はSN比値が、第1の電力値又はSN比値より大きい又は高いこととしてもよい。
【0019】
好適な実施形態では、航法衛星センサの高感度の受信機能は、所定の第1の仰角値より大きい仰角の方向に位置する衛星からの衛星信号のみを測位に使用し、低感度の受信機能は、所定の第2の仰角値より大きい仰角の方向に位置する衛星からの衛星信号のみを測位に使用し、第2の仰角値が、第1の仰角値より大きいこととしてもよい。
【0020】
好適な実施形態では、航法衛星センサの高感度の受信機能は、電力の大きい順において第1位から第1の順位までの電力をもつ衛星からの衛星信号のみを測位に使用し、低感度の受信機能は、電力の大きい順において第1位から第2の順位までの電力をもつ衛星からの衛星信号のみを測位に使用し、第2の順位が、第1の順位より高いこととしてもよい。
【0021】
好適な実施形態では、上記測位制御装置は、上記処理C)を実行するとき、上記処理C1)(S602−S607)と上記処理C2)(S608−S611)とを並行的に実行し、上記処理C1で取得されかつ前記誤測位の可能性が推定されない位置情報と、上記処理C2)で取得される位置情報のうち、いずれか先に取得された方を、前記現在位置情報として選択することとしてもよい(S620−S625、S621−S615)。
【発明の効果】
【0022】
本発明によれば、様々な場所でできるだけ移動体の正確な位置を測位することができる。
【0023】
また、受信感度の高いGPSセンサが位置を誤測位したときの悪影響を低減することができる。
【図面の簡単な説明】
【0024】
【図1】本発明の第1の実施形態に係る測位装置とそれに関連する移動体監視システムの構成を示す図である。
【図2】測位装置が有する制御部11の機能ブロックを示す図である。
【図3】移動体1から見たGPS衛星の仰角とマルチパス信号との関係を示す図である。
【図4】移動体1が高速移動中か否かを推定する処理のフローの一例を示す図である。
【図5】誤測位推定処理のフローの一例を示す図である。
【図6】時間の経過と共にGPS衛星6が移動することを示す図である。
【図7】第2の実施形態にかかる測位装置の構成を示す図である。
【図8】第2の実施形態における誤測位推定処理のフローの一例を示す図である。
【図9】第3の実施形態にかかる測位装置の構成を示す図である。
【発明を実施するための形態】
【0025】
以下、本発明の一実施形態に係る測位装置について、図面を参照して説明する。
(第1の実施形態)
【0026】
図1は、本発明の第1の実施形態に係る測位装置とそれに関連する移動体監視システムの構成を示す図である。
【0027】
図1に示されるように、少なくとも1つの移動体1が任意の地理的な場所に存在し、その移動体1と管理サーバ4とが通信衛星2、地上局3、及びインターネットなどの通信ネットワークNを介して相互通信可能に接続される。ネットワークNには、移動体1の管理者の端末である管理者端末5が接続される。移動体監視システムは、管理サーバ4と管理者端末5と移動体1を備える。移動体1は、移動体1の位置情報、稼働時間及び稼働状況などを示す移動体情報15aを通信衛星2を介して地上局3へ送信し、管理サーバ4が移動体情報15aを受信する。また、必要に応じて管理サーバ4あるいは管理者端末5から移動体1に対して、移動体1の各制御に用いられる制御プログラムなどの情報を通信衛星2を介して送信することもできる。
【0028】
移動体1は、油圧ショベルやホイールローダ、モータグレーダ、クレーン、ブルドーザ、ダンプトラック、フォークリフトといった、エンジンなどの動力源で走行装置を駆動させ、移動可能な建設機械や産業車両などである。また、移動体1は、測位制御装置10、GPSセンサ16及び無線送受信機17を有する。本実施形態にかかる測位装置は、測位制御装置10とGPSセンサ16とを含む。測位制御装置10は、GPSセンサ16及び無線送受信機17に接続される。GPSセンサ16は、アンテナ16aを有し、アンテナ16aを介して複数のGPS衛星6から送信された衛星信号(測位信号)を受信し、その信号をもとに、その移動体1の現在位置を演算し、その現在位置を示した自己位置情報212を出力する。測位制御装置10は、GPSセンサ16から上記自己位置情報212を取得する。無線送受信機17は、アンテナ17aを介して通信衛星2に通信可能に接続され、測位制御装置10と管理サーバ4との間のデータの送受信の処理を行う。
【0029】
移動体1は、本発明の恩恵を十分に受けるために、移動速度が比較的に低いもの、例えば、自走状態では5分間に1km以上も移動することが実質的にないようなものが好ましい。その典型例は、建設機械、或いは、歩行者(又は、歩行者により携帯される携帯通信端末)である。以下の説明では、移動体1が建設機械(例えば油圧ショベル)である場合を例にとる。この場合、移動体1は、バケットとブームおよびアームによって構成される作業機21を有し、作業機21は作業機制御部20によって制御される。また、移動体1は、エンジン31を有し、エンジン31はエンジン制御部30によって制御される。エンジン制御部30は、図示しないコモンレールによってエンジン31へ供給される燃料噴射量を調節しエンジン出力を制御するものであって、エンジンコントローラと称され、CPU(Central Processing Unit)などの数値演算装置である。エンジン31は、作業機21及び上部旋回体や下部走行体(走行パワートレイン)を駆動するための動力源であるとともに、発電機33を駆動する。なお、油圧ショベルの場合、作業機21には、上部旋回体や下部走行体も含まれる。作業機制御部20によって、上部旋回体の旋回制御や下部走行体の走行制御が行われる。移動体1が油圧ショベルである場合、エンジン31が油圧ポンプを駆動させ、油圧ポンプは、作業機21に備えられる油圧シリンダや上部旋回体や下部走行体の油圧モータに作動油を供給する。つまり、作業機制御部20は、油圧モータが吐き出す作動油の量を制御するものであってポンプコントローラと称され、CPUなどの数値演算装置である。発電機33は、バッテリー34に電気エネルギーを供給する。バッテリー34は電気エネルギーを蓄積して、移動体1内の様々な電装品、並びに、上述した測位制御装置10、GPSセンサ16及び無線送受信機17に駆動電力を供給する。測位制御装置10、GPSセンサ16及び無線送受信機17は、エンジン31が作動しているか停止しているかに関わらず、常時あるいは間欠的に、バッテリー34から電力を受けて作動し続ける。
【0030】
設定部22は、移動体1の操作者により操作されることで、測位制御装置10、作業機制御部20及びエンジン制御部30に対して各種の設定を行ったり、各種のコマンドを送ったり、また、測位制御装置10によって検出された移動体1の現在位置や、作業機21の状態や、エンジン31の状態などを操作者に表示するためのものである。典型的には、設定部22として、複数の押しボタンスイッチや液晶モニタあるいはタッチパネルで構成されるものを用いることができる。キースイッチ32は、操作者に操作されて、エンジンを始動/停止させたりする。典型的には、キーをキーシリンダに挿入し、回動させることでエンジン始動/停止の電気信号を発するものが用いられる。なお、キーの代わりにイモビライザーといった電子キーによって操作者を識別しエンジンの始動/停止を行うものであってもよい。
【0031】
測位制御装置10は、作業機制御部20およびエンジン制御部30に接続される。測位制御装置10は、制御部11と記憶部15を有する。測位制御装置10は、具体的には、CPUなどの数値演算装置やROM(Read Only Memory)やRAM(Random Access Memory)といった不揮発性記憶装置や揮発性記憶装置で構成される。制御部11は、通信制御部12とGPSセンサ制御部13と発報制御部14を有する。制御部11の通信制御部12は、作業機21及びエンジン31の状態並びに動作履歴などの稼働情報を取得する。通信制御部12は、また、発電機33の出力電圧の情報を取得し、エンジン31が稼動状態か停止状態かの稼働情報を取得する。また、通信制御部12は、GPSセンサ16から自己位置情報212を取得する。そして、通信制御部12は、それらの取得した情報を移動体情報15aとして記憶部15に記憶する。
【0032】
制御部11及びGPSセンサ16の詳細については、後述する。
【0033】
図2は、測位制御装置10に係る制御部11の機能ブロックを示す図である。
【0034】
制御部11は、GPSセンサ制御部13、発報制御部14、通信制御部12を有する。GPSセンサ制御部13は、GPSセンサ16に接続される。
【0035】
GPSセンサ16は、3つ、もしくは4つ以上のGPS衛星6からの衛星信号を受信し、上記複数の衛星信号の情報から、自己位置情報212となる経度、緯度、及び高度を算出する。
【0036】
GPSセンサ16は、本明細書で「高感度」及び「低感度」とそれぞれ呼ばれる2種類の衛星信号受信機能を有し、その2種類の衛星信号受信機能を選択的に切り替えて使用することができるように構成されている。ここで、「低感度」の衛星信号受信機能は、屋内での位置測定には使えないことがしばしがあるが、マルチパス信号の影響を受けることは殆どない。これに対し、「高感度」の衛星信号受信機能は、屋内での位置測定にも使えるが、マルチパス信号の影響を受けることがある。マルチパス信号の影響を受けていないときは、GPSセンサ16が受信した衛星信号によって実際の現在位置を実用的に正確に示した自己位置情報212を出力することができるが、マルチパス信号の影響を受けているときは、実際の現在位置から大幅に外れた(典型的には数km以上も外れた)位置を示す不正確な自己位置情報212を出力することが多い。「高感度」と「低感度」の区別は、例えば、現在位置の測定に使用される衛星信号の電力の大きさ(電波の強さ)又は受信強度を示す受信SN比の高さで区別することもできるし、現在位置の測定に使用される衛星信号の数(衛星の数)で区別することもできる。前者の区別の仕方によれば、例えば、比較的小さな電力値以上の範囲、例えばマイナスAAdBm以上(AAは数値)の範囲、の電力をもつ電波を位置測定に使用する場合を高感度と呼び、比較的大きな電力値以上の範囲、例えばマイナスAdBm以上(AはAAよりも小さな数値)の範囲、の電力をもつ衛星信号を使用する場合を低感度と呼ぶことができる。あるいは、例えば、比較的に低いSN比値以上の範囲の受信SN比をもつ衛星信号を現在位置の測定に使用する場合を高感度と呼び、比較的に高いSN比値以上の範囲の受信SN比をもつ衛星信号を使用する場合を低感度と呼ぶことができる。
【0037】
GPSセンサ16は、測位制御装置10から与えられる感度切替コマンド211に応答して、その2種類の衛星信号受信機能のいずれか一方を選択する。高感度と低感度の選択の具体的方法には、幾つかの方法が採用し得る。例えば、一つの方法によれば、GPSセンサ16は、アンテナ16aからGPSセンサ16に入力される衛星信号の中から、その電力値の大きさが所定の閾値より小さい信号を除去するフィルタ回路を有し、そのフィルタ回路が、感度切替コマンド211に応答して、前記閾値を大きい値(例えばマイナスAdBm)と小さい値(例えばマイナスAAdBm)に切り替える。そして、GPSセンサ16は、そのフィルタ回路を通過した衛星信号を制御部11のGPSセンサ制御部13に送信し、GPSセンサ制御部13は移動体1の現在位置を演算する。この場合、大きい値の閾値が選択されたときが低感度であり、小さい値の閾値が選択されたときが高感度である。
【0038】
別の方法によれば、GPSセンサ16は、例えばマイナスAAdBmのような或る電力値以上の電力をもつあらゆる衛星信号を受信し、それらの受信された衛星信号(例えば、12個のGPS衛星6からの衛星信号)の中から、受信された電力値の大きな順で第1位から所定順位までの衛星信号を選択する選択回路を有し、その選択回路が、感度切替コマンド211に応答して、上記所定順位を、低い順位(例えば第7位)と高い順位(例えば第4位)に切り替える。そして、GPSセンサ16は、その選択回路で選択された衛星信号を制御部11の測位部202に送信し、測位部11は移動体1の現在位置を演算する。この場合、低い順位が選択されたときが「高感度」であり、高い順位が選択されたときが「低感度」である。
【0039】
また別の方法によれば、通常、マルチパス信号の電力値は小さいので、GPSセンサ16は、複数のGPS衛星6からの衛星信号を受信できたとき、受信された衛星信号の電力値の大きい衛星信号の重み付けを大きくし、受信電力の小さい衛星信号の重み付けを小さくし、その重み付けを考慮して現在位置を演算する。これにより、受信された衛星信号の電力値の小さい衛星信号、すなわちマルチパス信号である可能性の高い衛星信号の影響を小さくすることができるので、より正確な現在位置を演算することができる。この場合、受信された衛星信号の電力に応じた重み付けの違いを感度切替コマンド211に応答して小さくしたり、大きくしたりすることができ、そして、重み付けの違いを小さくしたときが「高感度」であり、重み付けの違いを大きくしたときが「低感度」である。
【0040】
また別の方法によれば、GPSセンサ16は、アンテナ16aで受信可能な衛星信号の発信元のGPS衛星6の移動体1から見た仰角範囲を、感度切替コマンド211に応答して、広い角度範囲(所定の小さい角度以上の仰角範囲)と狭い角度範囲(所定の大きい角度以上の仰角範囲)とに選択的に切り替える。この場合、広い角度範囲が選択されたときが「高感度」であり、狭い角度範囲が選択されたときが「低感度」である。つまり、高い高度はもちろん、低い高度に位置するGPS衛星6からの衛星信号をも受信するのが「高感度」であり、高い高度に位置するGPS衛生6からの衛星信号を受信するのが「低感度」である。
【0041】
ここで、図3を参照する。図3は、移動体1から見たGPS衛星6の仰角とマルチパス信号との関係を示す図である。移動体1の周囲にある障害物520や521は、例えば高層ビルなどが想定される。移動体1から見て仰角の大きい(天頂方向に近い)方向にあるGPS衛星6bからの衛星信号500bは、移動体1のアンテナ16aに直接届きやすい。しかし、移動体1から見て仰角の小さい(水平方向に近い)方向にあるGPS衛星6cからの衛星信号500cは、障害物520に反射した後、アンテナ16aに届いてしまう可能性がより高い。すなわち、時々のGPS衛星6の位置や移動体1の周囲環境によって、GPSセンサ16は、仰角の比較的高いGPS衛星6bからよりも、仰角の比較的低いGPS衛星6cからマルチパス信号を受信してしまう可能性が高くなる。したがって、上記のようにGPSセンサ16を、仰角の比較的に高い衛星信号のみを受信する「低感度」に設定することで、仰角の比較的低いGPS衛星6cからの衛星信号500c、すなわちマルチパス信号を除去することができる。
【0042】
図2の説明に戻る。
【0043】
GPSセンサ制御部13は、受信感度制御部201と測位部202と誤測位推定部203を備える。
【0044】
測位部202は、GPSセンサ16から自己位置情報212を取得する。そして、測位部202は、取得された自己位置情報212の中から、誤測位でないと推定された自己位置情報212を選び、その選択された自己位置情報212を信頼できる自己位置情報として採用し、それを移動体情報15aの一部として記憶部15に記憶する。
【0045】
誤測位推定部203は、上記取得した自己位置情報202が、例えばマルチパス信号の影響によって誤測位であるか否かを推定する。誤測位とは、上記取得した自己位置情報212が、実際に移動体1が存在する位置と大きく乖離してしまう現象を言う。この現象は、前述の通り、GPSセンサ16を高感度に設定したことでマルチパス信号を受信してしまったときなどに発生する。なお、本実施形態において、誤測位の推定は、移動体1が高速移動中(例えば、移動体1がトラックに乗せられて運搬されているとき)には行われず、移動体1が高速移動中でないとき(例えば、移動体1が自走している又は停止しているとき)に行われる。その理由は、高速移動中は誤測位の推定処理の信頼性が低いからである。つまり、移動体1の現在位置として得られた自己位置情報が、移動体1が実際に高速移動している時の位置か、あるいは誤測位により得られた位置かは、トラックあるいは移動体1に速度センサといった移動を検知する補助手段を設けない限り、誤測位の推定が困難であるからである。なお、移動体1が高速移動中か否かの推定処理と、誤測位の推定処理については後述する。
【0046】
受信感度制御部201は、GPSセンサ16ができるだけマルチパス信号の影響を受けずに、できるだけ精度よく現在位置を演算できるようにするために、GPSセンサ16に対して感度切替コマンド211を与えてGPSセンサ16の衛星信号受信機能を高感度か低感度かに選択的に切り替える。
【0047】
発報制御部14は、定期的に(例えば毎日決められた時刻に)及び所定のイベント(例えば、エンジン31の始動と停止、所定の故障の発生、管理サーバから移動体情報15aの要求を受信した、移動体1が指定エリアに侵入又は退出した、など)が発生したときに、記憶部15に記憶されている移動体情報15aを、無線送受信機17を介して管理サーバ4側に送信する。
【0048】
図4は、移動体1が高速移動中か否かを推定する処理のフローの一例を示す図である。図4の処理フローは、その1周期での移動体1の位置変化が実用上必要とされる測位精度を損なわないような高速の周期(例えば1秒周期)で、繰り返し実行される。
【0049】
まず、測位部202は、GPSセンサ16から、自己位置情報212を取得する(S301)。この取得された最新の自己位置情報212を「p1」とする。
【0050】
次に、発報制御部14は、最終発報時の自己位置情報212を記憶部15から取得する。最終発報時とは、最も直近に移動体1から管理サーバ4あるいは管理者端末5に対して、移動体情報15aを送信した時を意味する。すなわち、最終発報時の自己位置情報212とは、その時に記憶部15に記憶されていた自己位置情報212のことである。この取得された最終発報時の自己位置情報212を「p0」とする。そして、発報制御部14は、p1とp0との差分距離を計算し、当該距離がXkm以上(Xは数値)か否かを判定する(S302)。なお、当該距離の閾値は、適宜に設定変更可能である。ここで、当該距離がXkm未満のときは(S302:No)、移動体1が高速移動中ではないと推定でき、制御は誤測位判定処理(S320)に進む。誤測位判定処理については、後述する。一方、当該距離がXkm以上のとき(S302:Yes)は、移動体1が高速移動中であると推定でき、制御ステップS303に進む。つまり、前回(最終発報時の自己位置情報)の位置と今回(最新の自己位置情報)の位置が大きく離れていることは、移動体1が短時間に移動したことであることを意味し、高速移行中であると推定するのである。
【0051】
ステップS303で、発報制御部14は、移動体1の高速移動が開始された場合に行われるべき発報処理を行う。具体的には、通信制御部12が、高速移動開始を示すフラグ及びステップS301で取得された自己位置情報p1等を含んだ移動体情報15aを管理サーバ4に送信する。
【0052】
次に、発報制御部14は、最終発報時の位置情報であるp0に、ステップS301で取得された自己位置情報p1を代入し、p0を記憶部15に記憶する(S304)。すなわち、p0は、移動体1が高速移動を開始したと推定された地点の位置情報に置き換えられる。
【0053】
次に、測位部202は、再びGPSセンサ16から自己位置情報212を取得する(S305)。この取得された自己位置情報212を「p2」とする。
【0054】
その後、発報制御部14は、p2とp1の間の距離を計算し、当該距離がYm未満(Yは数値)か否かを判定する(S306)。ここで、当該距離がYm以上のときは(S306:No)、移動体1はまだ高速移動中であると推定され、p1にp2を代入して(S330)、ステップS305に戻る。一方、当該距離がYm未満のときは(S306:Yes)、ステップS307に進む。なお、当該距離の閾値は、適宜に設定変更可能である。
【0055】
ステップS307で、発報制御部14は、タイマーをT分(Tは数値)にセットする。そして、そのタイマーがT分を経過したか否かを判断し、タイマーがT分を経過しているときは、ステップS311に進む。なお、ここでセットしたタイマーの値は、適宜に設定変更可能である。
【0056】
上記タイマーがまだT分を経過してなければ、次に、発報制御部14は、再びGPSセンサ16から自己位置情報212を取得する(S308)。この取得された自己位置情報212を「p3」とする。
【0057】
次に、発報制御部14は、p3とp2の間の距離を計算し、当該距離がZm未満(Zは数値)か否かを判定する(S309)。ここで、当該距離がZm以上のときは(S309:No)、移動体1はまだ高速移動中であると推定され、p1にp3を代入して(S331)、ステップS305に戻る。一方、当該距離がZm未満のときは(S309:Yes)、すでにセットされているタイマーをチェックするために(S310)、ステップS307に戻る。なお、当該距離の閾値は、適宜に設定変更可能である。また、ステップ306およびステップ309で用いた閾値のYmとZmは、同一値でも異なる値でもよい。
【0058】
次に、ステップS307でタイマーがT分を経過した後の処理について説明する。この場合、p3とp2の間の距離がZm未満の状態がT分以上続いたので、移動体1は高速移動を終了したと推定され、発報制御部14は、高速移動終了の場合に行われるべき発報処理を行う(S311)。具体的には、通信制御部12が、移動停止を示すフラグ及び取得された最新の自己位置情報p3等を含む移動体情報15aを管理サーバ4に送信する。
【0059】
次に、発報制御部14は、p0に最終発報時の自己位置情報212であるp3を代入し、p3を記憶部15に記憶する(S312)。その後、制御は最初のステップS301に戻る。
【0060】
上述の処理により、誤測位判定処理が、移動体1が高速移動をしてないと推定されたときのみ実行されることとなる。
【0061】
なお、上述の処理では、移動体1の高速移動開始及び終了の推定を異なる時点での自己位置情報212の差分距離である移動距離に基づいて行っているが、他の方法で推定してもよい。例えば、エンジン31が稼働中か停止中かという情報(例えば、エンジン31の出力軸に取り付けた回転速度センサから出力される電気信号やエンジン31とともに駆動する発電機33から出力される電気信号)も、高速移動の推定に利用してもよい(典型的には、エンジン31が稼働中であれば、高速移動中、特にトレーラやトラックによる運搬中、ではないと推定できる)。
【0062】
図5は、誤測位推定処理のフローの一例を示す図である。図5の処理フローは、その1周期での移動体1の位置変化が実用上必要とされる測位精度を損なわないような高速の周期(例えば1秒周期)で、繰り返し実行される。
【0063】
まず、誤測位推定部203は、ループカウンタに「N(Nは数値)」をセットする(S401)。ここで、当該ループカウンタがN以上のときは、ステップS413に進む。なお、ここでセットしたループカウンタの値は、適宜に設定変更可能である。ここでループカウンタをセットしている理由及び、以降でタイマーをセットしている理由については後述する。
【0064】
次に、誤測位推定部203は、受信感度制御部201から感度切り替えコマンド211をGPSセンサ16に与えることでGPSセンサ16を高感度に設定し、GPSセンサ16から測位部202を介して高感度での自己位置情報212を取得する(S402)。このステップ402の機会に取得された自己位置情報を「p1」とする。
【0065】
次に、誤測位推定部203は、p1とp0(最終発報時の位置情報)の差分距離を計算し、当該距離がX1km以上(X1は数値)か否かを判定する(S403)。ここで、当該距離がX1km以上のとき(S403:Yes)は、マルチパス信号の影響による誤測位が生じている可能性があり、制御はステップS404に進む。一方、当該距離がX1km未満のとき(S403:No)は、マルチパス信号の影響による誤測位は生じてないと推定され、制御はステップS420に進む。なお、当該距離の閾値は、適宜に設定変更可能である。
【0066】
上記のようにマルチパス信号の影響による誤測位の可能性があるとして、制御がステップS404に進むと、誤測位推定部203は、タイマーをT1分(T1は数値)にセットし、そして、そのタイマーが、T1分を経過してないかチェックする。ここで、そのタイマーがT1分を経過しているときは、制御はステップS408に進む。なお、ここでタイマーにセットされたT1分という時間長は、一旦マルチパス信号の影響による誤測位が生じたとしても、その時間長が経過するまでの間に、GPS衛星6が衛星軌道上を移動することでマルチパス信号の発生が解消されて、正しい測位ができるようになる、と期待される時間長である。このT1分という値は、適宜に設定変更可能である。
【0067】
ステップS404でタイマーがまだT1分を経過してなければ、次に、誤測位推定部203は、受信感度制御部201を介してGPSセンサ16を高感度に設定し、GPSセンサ16から測位部202を介して高感度での自己位置情報212を取得する(S405)。このステップS405の機会に取得された自己位置情報212を改めて「p1」とする。
【0068】
次に、誤測位推定部203は、p1とp0の差分距離を計算し、当該差分距離がX2m未満(か否か
X2は数値)を判定する(S406)。ここで、当該差分距離がX2m以上のとき(S406:No)は、マルチパス信号の影響による誤測位の可能性が否定されないので、さらに待つために(S407)、ステップS404に戻る。一方、当該距離がX2m未満のときは(S406:Yes)、マルチパス信号の影響による誤測位の可能性が否定されると推定されるので、制御はステップS420に進む。なお、当該差分距離の閾値は、適宜に設定変更可能である。
【0069】
次に、ステップS404でタイマーがT1分(T1は数値)経過した後の処理について説明する。この場合、T1分が経過してもまだなお、高感度の測位についてマルチパス信号の影響による誤測位の可能性が続いていると推定され、制御はステップS408に進み、ここで誤測位推定部203は、タイマーをT2秒(T2は数値)にセットし、そのタイマーがT2秒を経過したか否かをチェックする。ここで、セットしたタイマーがT2秒を経過したときは、まだ正しいと推定される自己位置情報212が得られてないことを意味する。この場合、制御はステップS412に進み、ステップS401から次の回のループが開始される。なお、ここでタイマーにセットしたT2秒という時間長は、マルチパス信号の影響の少ない低感度での測位を一時的に行うための時間長であり、かつ、その時間長程度の短い時間だけ一時的に低感度測位を行なうことは、高感度での測位を行うことの利点(衛星信号のどれもが微弱な電力であるような環境(例えば室内)であっても、測位ができる可能性が高い)に実用上の悪影響を与えないという、短い時間である。このT2秒という値は、適宜に設定変更可能である。
【0070】
ステップS408でT2秒がまだ経過してなければ、次に、誤測位推定部203は、受信感度制御部201からGPSセンサ16に感度切り替えコマンド211を送ることでGPSセンサ16を低感度に設定し、GPSセンサ16から測位部202を介して低感度での自己位置情報212の取得を試みる(S409)。このS409の機会に取得された低感度での自己位置情報212が取得されたならば、その自己位置情報212を「p1’」とする。
【0071】
次に、誤測位推定部203は、p1’を取得できたか否かを判定する(S410)。すなわち、低感度で測位が行えたか否かを判定する。低感度では、移動体1の場所(周囲環境)や時間により、GPS衛星6から送信される、測位のために必要な数の衛星信号が受信できないために測位ができない場合がある。ここで、自己位置情報212のp1’を取得できたときは(S410:Yes)、その取得されたp1’が信頼できる自己位置情報212であると推定され、制御はステップS421に進む。一方、p1’を取得できなかったときは(S410:No)、タイマーがT2秒を経過する前に、再度、低感度での自己位置情報212を取得するために(S411)、制御はステップS408に戻る。
【0072】
次に、ステップS408でタイマーがT2秒経過した後の処理について説明する。この場合、低感度での測位もできなかったことになり、誤測位推定部203は、次の回のループを繰り返すために(S412)、ステップS401に戻る。
【0073】
次に、ステップS401でループカウンタがN以上(Nは数値)になった後の処理について説明する。この場合、N回のループを繰り返して合計Ttotal分間(Ttotal=ΣTloop(n) n=1〜N)の測位を試みたが、高感度及び低感度のいずれにおいても信頼できる自己位置情報212が取得できなかったことを意味する。Tloop(n)は、一回のループに要する時間であって、ループは、最大で予め設定されているループの回数(N)まで実行される。したがって、ループが最大N回実行されたならば、合計Ttotalの時間は、ループが1〜Nまで実行された合計時間となる。この場合、誤測位推定部203は、次善の策として、最終発報時の自己位置情報212であるp0を、移動体1の現在位置を示す自己位置情報212(P)として採用し(S413)、Pを記憶部15に記憶する(S414)。
【0074】
ここで、ステップS403の判定が「No」、又はステップS406の判定が「Yes」のときの処理について説明する。これらの判定は、高感度での測位がマルチパス信号による影響を受けずに正常にできた(ステップS403でNo)、または、一時的にマルチパス信号による影響を受けたようだが、後にそれが解消して高感度で正確な測位ができた(ステップS406でYes)と推定される場合を意味する。これらの場合、誤測位推定部203は、取得された高感度での自己位置情報212(p1)を、移動体1の現在位置を示す自己位置情報212(P)として採用し(S420)、Pを記憶部15に記憶する(S414)。
【0075】
次に、ステップS410の判定が「Yes」のときの処理について説明する。この判定は、高感度で測位した自己位置情報212(p1’)は誤測位の可能性があるが、低感度で測位した位置情報p1’は(低感度での測位はマルチパス信号の影響をほとんど受けないので)信頼できると推定される場合を意味する。この場合、誤測位推定部203は、取得された低感度の自己位置情報212(p1’)を、移動体1の現在位置を示す自己位置情報212(P)として採用し(S421)、Pを記憶部15に記憶する(S414)。
【0076】
なお、記憶部15に記憶されたPは、例えば、移動体情報15aの一つとして、予め設定された日々の定時時刻に管理サーバ4や管理者端末5に対して送信(定時発報)され、移動体1の稼動状況の管理や管理者(例えば、サービスマン)によるメンテナンス作業の計画管理などに用いられる。また、記憶されたPは、管理サーバ4や管理者端末5からの要求に応じて、任意の時刻に移動体1から管理サーバ4や管理者端末5に送信されてもよい。
【0077】
上述のように、GPSセンサ制御部13は、基本的に高感度での測位結果を採用するが、高感度の測位結果にマルチパス信号の影響による誤測位の可能性が推定された場合、GPS衛星6の衛星軌道上の位置が変化してマルチパス信号の影響が解消されると期待される時間の間、高感度で再測位を試み、それでも誤測位の可能性が解消されなければ、一時的に低感度で再測位を試み、そして、この2種類の再測位のシーケンスを、必要に応じて何度か繰り返して、信頼できる測位結果を取得しようとする。これにより、GPSセンサ制御部13は、高感度での測位の利点を生かしつつ、高感度での測位の弱点を抑制して、できるだけ正確な移動体1の自己位置情報212を取得することができる。
【0078】
図6は、時間の経過と共にGPS衛星6が移動することを示す図である。
【0079】
図6(a)は、ある時刻におけるGPS衛星6の位置を示す図である。
【0080】
移動体1の自己位置情報212を正確に測位するためには、移動体1はGPS衛星6からの衛星信号を4つ以上受信する必要がある。しかし、図6(a)では、GPS衛星6aからの衛星信号500aは障害物520に阻まれ移動体1に到達せず、GPS衛星6b及び6eからの衛星信号500b、500eは障害物520あるいは521に反射し、マルチパス信号として移動体1に到達してしまう。そのため、移動体1は少なくとも4つのGPS衛星6b、6c、6d及び6eからの衛星信号500b、500c、500d及び500eを受信するが、正確な自己位置を測定(測位)することができない。
【0081】
図6(b)は、図6(a)からある時間が経過した後のGPS衛星6の位置を示す図である。
【0082】
GPS衛星6は衛星軌道上を周回しているため、時間が経過すると移動体1に対するGPS衛星6の位置は移動する。図6(b)では、GPS衛星6が移動したため、移動体1は少なくとも4つのGPS衛星6a〜6dからの衛星信号500a〜500dを正常に直接受信して、自己位置を正確に測定(測位)することができる。
【0083】
すなわち、ある時刻に自己位置が正確に測定(測位)できなかったとしても、ある時間(例えば1〜数分)が経過すると、GPS衛星6が移動し、正しく自己位置が測定(測位)できるようになる可能性がある。
【0084】
そこで上記の第1の実施形態は、図5のフローチャートに示したように、移動体1が、高感度での自己位置の測定(測位)ができなかった場合、又は行われた高感度での測位に誤測位の疑いがあった場合は、その後に第1の所定時間(例えばT1分)が経過するまでの間(つまり、GPS衛星が上記の問題が解消する位置へ移動すると期待される時間の間)、高感度で再度測位するようにしている。
【0085】
また、第1の実施形態では、このようにして移動体1が高感度で自己位置の測定(測位)を繰り返した後、まだなお正確な測位ができなかった疑いがある場合には、上述した第1の所定時間(例えばT1分)より短い第2の所定時間の間(例えばT2秒)に限って、一時的に低感度での自己位置の測定(測位)を行う。これにより、高感度での測位という基本機能の利点を実質的に最大限に生かしつつ、その弱点を補って、より正確な測位が可能である。ところで、本実施形態の変形例として、高感度での自己位置の測定(測位)に上記のような問題が生じた場合、先に上記のような低感度での測位を行い、それでもなお問題があった場合には、上記のような高感度での再度の測位をするような処理の順序にしてもよい。この場合、低感度で自己位置情報212が取得できた場合は、その自己位置情報212を信頼できる自己位置情報212として採用し、そうでなかった場合は、次に高感度で測位を行う。そして、その高感度での自己位置情報212の測位では、図5のステップS402〜S407に示すように、誤測位の推定を行い、測位した自己位置情報212が誤測位でないと推定した場合は、その自己位置情報212を現在の位自己置情報212として採用してもよい。
(第2の実施形態)
【0086】
次に、第2の実施形態に係る測位装置について説明する。
【0087】
図7は、第2の実施形態にかかる測位装置の構成を示す。
【0088】
図7に示されるように、第2の実施形態にかかる測位装置は、移動体1に搭載され、GPSセンサ16と測位制御装置10とを有する。この測位装置は、高感度と低感度の測位を同時並行的に行うように構成されている。すなわち、この測位装置のGPSセンサ16は、高感度の衛星信号受信機能と低感度の衛星信号受信機能とを同時並行的に使用して、高感度での自己位置情報と低感度での自己位置情報の双方を同時並行的に出力できるように構成されている。例えば、図7(a)又は図7(b)に示すように、GPSセンサ16は、高感度の衛星信号受信機能を行う高感度受信回路601と、低感度の衛星信号受信機能を行う低感度受信回路602(これは、図7(a)に示されるように高感度受信回路601から独立したものであっても、あるいは、図7(b)に示されるように高感度受信回路601で受信された衛星信号の中から電力又は仰角などに基づいて比較的に信頼性の高い一部の衛星信号だけを選び出すものであってもよい)と、これら高感度と低感度の受信回路601と602でそれぞれ受信された衛星信号を用いて高感度での自己位置情報と低感度での自己位置情報の双方を算出して並行的に出力する演算回路603とを有している。
【0089】
また、この測位装置の測位制御装置10は、図2に示すような構成をもち、図4に示した高速移動中か否かの推定処理を行い、そして、高速移動中でないと推定されたときにだけ誤測位推定処理を行う点では、第1の実施形態の場合と共通する。しかし、第1の実施形態の場合と異なる点は、この測位制御装置10が、GPSセンサ16から高感度での自己位置情報と低感度での自己位置情報を並行的に取得して、以下に説明する誤測位推定処理を行うように構成されている点である。
【0090】
図8は、第2の実施形態における誤測位推定処理のフローの一例を示す図である。
【0091】
まず、誤測位推定部203は、ループカウンタに「N’」(N’は数値)をセットする。ここで、当該ループカウンタがN’以上のときは、ステップS614に進む。なお、ここでセットしたループカウンタの値は、適宜に設定変更可能である。
【0092】
次に、誤測位推定部203は、a)高感度における測位と、b)低感度における測位との並列処理(両方の測位を同時並行的に行う処理)を開始する。
【0093】
まずは並列処理のa)高感度における測位について以下に説明する。
【0094】
誤測位推定部203は、図8のステップS602〜S607において、移動体1の高感度での位置情報を取得する。この処理は、基本的に図5のステップS402〜S407の処理と同様の処理である。
【0095】
ただし、ステップS603の条件分岐において、ステップS602で取得された自己位置情報「p1」と最終発報時の位置情報「p0」の差分距離がX3km未満(X3は数値)であったときは(S603:No)、「p1」にマルチパス信号の影響による誤測位は生じていないと推定され、制御はその「p1」を保持してステップS612に進む。
【0096】
さらに、ステップS606の条件分岐において、ステップS605で改めて取得された自己位置情報「p1」と最終発報時の位置情報「p0」の差分距離がX4m未満(X4は数値)となったときは(S606:Yes)、その「p1」はマルチパス信号の影響による誤測位の可能性が解消されたと推定され、制御はステップS604〜S607のタイマーのループを抜けて、その「p1」を保持してステップS612に進む。
【0097】
また、ステップS604〜S607のループのタイマーにセットされたT3分間(T3は数値)の間に誤測位の可能性が解消されなかったと推定されたときは、制御は「位置情報の取得不可」という情報を保持してステップS612に進む。
【0098】
次に、並列処理のb)低感度における測位について以下に説明する。
【0099】
誤測位推定部203は、図8のステップS608〜S611において、移動体1の低感度での位置情報を取得する。この処理は、基本的に図5のステップS408〜S411の処理と同様の処理である。
【0100】
ただし、ステップS610の条件分岐において、ステップS609で低感度での位置情報「p1’」を取得できたときは(S610:Yes)、制御はステップS608〜S611のタイマーのループを抜けて、その「p1’」を保持してステップS612に進む。
【0101】
また、ステップS608〜S611のループのタイマーにセットされたT4秒間(T4は数値)の間に低感度での位置情報を測位できなかったときは、制御は「位置情報の取得不可」という情報を保持してステップS612に進む。
【0102】
以上により、a)高感度による測位と、b)低感度による測位の並列処理を終了する。
【0103】
次に、並列処理終了後の処理(ステップS612以降の処理)について説明する。
【0104】
誤測位推定部203は、上記の並列処理において、a)高感度の測位と、b)低感度の測位のいずれか早く測位できた方の自己位置情報を取得し、どちらの受信感度で測位できたかを判定する(S612)。その判定の結果、高感度で測位された「p1」が最初に取得されたときは(S612:p1)、その「p1」を現在位置情報Pとして採用し(S620)、低感度で測位された「p1’」が最初に取得されたときは(S612:p1’)、その「p1’」を現在位置情報Pとして採用する(S621)。高感度でも低感度でも「位置情報の取得不可」だったときは(S612:取得不可)、ループの開始点であるステップS601に戻る(S613)。なお、ステップS601〜S613のループを所定の回数繰り返しても(すなわち、所定の時間測位を繰り返しても)、高感度でも低感度でも正しいと推定される位置情報が測位できなかったときは、次善の策として、p0(最終発報時の位置情報)を現在位置情報Pとして採用する(S614)。
【0105】
最後に、Pを記憶部15に記憶して(S615)、当該処理を終了する。
【0106】
これにより、第1の実施形態と同じ効果をより短時間で得ることができる。以下、その理由について説明する。
【0107】
上記のa)高感度の測位において、最初の測位(S602)で誤測位の可能性が低い自己位置情報が測位できたときは、すぐにステップS612に進む。また、最初の測位(S602)で誤測位の可能性が高い自己位置情報が測位されたときは、T3分のタイマーがセットされ、その間繰り返し測位が行われる。そして、誤測位の可能性が低い自己位置情報を測位できた時点でタイマーのループを抜け、ステップS612に進む。
【0108】
一方、上記のb)低感度の測位では、T4秒のタイマーがセットされ、位置情報が測位された時点でタイマーのループを抜け、ステップS612に進む。
【0109】
したがって、高感度ですぐに誤測位の可能性の低い自己位置情報が測位され、低感度でもすぐに自己位置情報が測位された場合は、どちらも誤測位の可能性が低いので、ステップS612において、いずれの自己位置情報が先に取得されても問題ないと推定される。
【0110】
また、高感度の最初の測位において誤測位の可能性の高い自己位置情報が測位され、高感度で繰り返し測位がなされている間に、低感度ですぐに位置情報が測位された場合は、ステップS612においては、低感度で測位された自己位置情報が先に取得されることになるので、これも誤測位の可能性が低いと推定される。
【0111】
また、低感度では測位されず、高感度でのみ測位されたときは、ステップS612においては、高感度で測位された自己位置情報が先に取得される。この高感度で測位された自己位置情報は、ステップS606において誤測位の可能性が解消されたと推定された位置情報なので、これも誤測位の可能性が低いと推定される。
【0112】
以上のように、高感度と低感度の測位を並列に行うことにより、第1の実施形態と同じ効果をより短時間で得ることができる。
(第3の実施形態)
【0113】
第3の実施形態にかかる測位装置について説明する。図9は、第3の実施形態にかかる測位装置の構成を示す。
【0114】
図9に示されるように、第3の実施形態にかかる測位装置は、移動体1に搭載され、そして、移動体1の異なる場所に設けられた複数、例えば2つ、のGPSセンサ701と702と、それら2つのGPSセンサ701と702に接続された測位制御装置703を備える。それぞれのGPSセンサ701と702は、第1又は第2の実施形態で用いられたGPSセンサ16と同様の構成と機能を有し、互いに独立して動作する。
【0115】
測位制御装置703は、2つのGPSセンサ701と702のそれぞれから自己位置情報を取得する。測位制御装置703は、移動体1が高速移動中か否かを図4に示したような方法で推定し、そして、移動体1が高速移動中でないと推定されているときにだけ、以下の方法によって誤測位の推定処理を行う。
【0116】
この誤測位推定処理は、1つのGPSセンサ701から取得された自己位置情報と、別のGPSセンサ702から取得された自己位置情報の双方に基づいて行われる。その具体的なやり方の一例は以下の通りである。
【0117】
まず、GPSセンサ701及び702の双方から高感度での自己位置情報を取得し、取得された自己位置情報について、誤測位の可能性を推定する。その結果、GPSセンサ701及び702の少なくとも一方から取得された高感度での自己位置情報が、誤測位の可能性がないと推定されたなら、その少なくとも一方から取得された高感度での自己位置情報を、移動体1の現在位置を示す現在位置情報Pとして採用する。なお、誤測位の可能性の推定のやり方としては、第1又は第2の実施形態で説明した処理と同様に、最終発報時の現在位置情報Pとの差分距離をチェックするやり方でもよいし、あるいは、GPSセンサ701及び702の双方から取得された自己位置情報間の差分距離をチェックするやり方でもよい。
【0118】
GPSセンサ701及び702の双方からの高感度での自己位置情報について、誤測位の可能性があると推定されたときには、続いて次のような処理を行う。すなわち、GPSセンサ701及び702の各々について、高感度での自己位置情報の再取得を試みる処理と、低感度での自己位置情報の取得を試みる処理とを、逐次的又は並行的に行う。この場合、GPSセンサ701及び702の双方について同様の処理を行ってもよいし、互いに異なる処理(例えば、一方の、高感度での自己位置情報の再取得を試み、他方のGPSセンサ702からは、低感度での自己位置情報の取得を試みる)。その結果、GPSセンサ701及び702の少なくとも一方から、信頼できる自己位置情報が取得できれば、それを現在位置情報Pとして採用する。
【0119】
上記以外に様々な誤測位推定処理が採用できるが、いずれにしても、さまざまな変形例として、一方のGPSセンサ701は少なくとも高感度の衛星信号受信機能を有して、それを用いて高感度での自己位置情報を出力し、他方のGPSセンサ702は少なくとも低感度の衛星信号受信機能を有して、それを用いて低感度での自己位置情報を出力し、その高感度と低感度の自己位置情報を用いて、図5又は図8に示された誤測位処理を行うようにしてもよい。
【0120】
ここで、GPSセンサ701及び702は移動体1上の、お互いにできるだけ遠く離れた位置に設置することが好ましい。離れた位置とは、水平方向でも垂直方向でもよい。それにより、GPSセンサ701及び702の双方が同じマルチパス信号の影響を受ける可能性を低くできるからである。
【0121】
変形例として、この測位装置が持つGPSセンサの数は3つ以上であってもよい。その場合、いずれかのGPSセンサが低感度で測位できたときは、その自己位置情報を現在位置情報Pとして採用できる。一方、いずれのGPSセンサでも高感度でしか測位できなかった場合は、例えば次のようにして現在位置情報Pを決めることができる。すなわち、所定の半径内に、所定の個数以上のGPSセンサからの位置情報が収まっている場合は、その半径の中心の位置を現在位置情報Pとし、そうでない場合は、誤測位の可能性が高いと判断して、再度位置情報を取得する。
【0122】
上記以外に様々な誤測位推定処理が採用できるが、いずれにしても、第3の実施形態にかかる測位装置は、要するに次のように構成されているといえる。すなわち、この測位装置は、少なくとも高感度の衛星信号受信機能を有して、それを用いて高感度での自己位置情報を出力する第1のGPSセンサ701と、少なくとも低感度の衛星信号受信機能を有して、それを用いて低感度での自己位置情報を出力するGPSセンサ702と、それら複数のGPSセンサ701及び702から高感度と低感度の自己位置情報を取得する測位制御装置703とを備える。測位制御装置703は、取得された高感度と低感度の自己位置情報を使用して、例えば図5又は図8に示された誤測位処理を行うことで、移動体1の現在位置を測定(測位)する。
【0123】
上述した本発明の実施形態は、本発明の説明のための例示であり、本発明の範囲をそれらの実施形態にのみ限定する趣旨ではない。移動体1は、建設機械や産業車両であってもよいが、GPSセンサを備えた他の車両にも適用可能である。また、走行装置を備えないが、地面に固定されずに他の荷役車両などによって移設されるようなGPSセンサを備えた発電機などの産業機械などにも、その現在位置を取得する必要がある場合に適用できる。当業者は、本発明の要旨を逸脱することなしに、他の様々な態様で本発明を実施することができる。例えば、本発明ならびに上述の実施形態及びその他の実施形態において、GPSに代えて又はそれと組み合わせて、GPS以外の航法衛星システムを採用することもできる。
【符号の説明】
【0124】
1…移動体 6…GPS衛星 10…測位制御装置 11…制御部 12…通信制御部
13…GPSセンサ制御部 14…発報制御部 15…記憶部 16…GPSセンサ
17…送受信機 201…受信感度制御部 202…測位部 203…誤測位推定部
【特許請求の範囲】
【請求項1】
移動体(1)に搭載され、前記移動体の位置を測定する測位装置(10と16)であって、
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度と低感度の衛星信号受信機能を有し、前記高感度の衛星信号受信機能を使って演算された高感度での位置情報と、前記低感度の衛星信号受信機能を使って演算された低感度での位置情報とを、選択的に又は並行的に出力する航法衛星センサ(16)と、
前記航法衛星センサから前記高感度での位置情報と前記低感度での位置情報とを選択的に又は並行的に取得して、前記高感度での位置情報と前記低感度での位置情報のいずれか一方を、前記移動体の現在位置を示す現在位置情報として選択する測位制御装置(10)と、
を備え、
前記測位制御装置(10)は、
前記測位制御装置(10)が過去に取得した位置情報と、前記航法衛星センサから前記高感度での位置情報と前記低感度での位置情報とを選択的に又は並行的に取得した現在位置情報との距離の差分の値に基づいて、前記現在位置情報が誤測位であるか否かを推定し、誤測位であると推定されたならば、所定時間を経過した後に、前記衛星信号受信機能を高感度から低感度あるいは低感度から高感度へと切り替える、
測位装置。
【請求項2】
請求項1記載の測位装置において、
前記測位制御装置は、以下の処理A)からD)、
A)前記衛星航法センサから前記高感度での位置情報を取得して、前記取得された高感度での位置情報に誤測位の可能性があるか否か推定し(S402−S403、S603−S603)、
B)前記処理A)で前記誤測位の可能性が推定されないときには、前記取得された高感度での位置情報を、前記現在位置情報として選択し(S400、S620)、
C)前記処理A)で前記誤測位の可能性が推定されたときには、その後に、
C1)第1の所定時間の間の1回以上の機会に、前記衛星航法センサから前記高感度での位置情報を再取得して、前記再取得された高感度での位置情報に誤測位の可能性があるか否か推定する第1の処理と(S404−S407、S604−S607)、
C2)第2の所定時間の間の1回以上の機会に、前記衛星航法センサから前記低感度での位置情報の取得を試みる第2の処理と(S408−S411、S608−S611)、
を処理C)として逐次的にまたは並行的に行い、
D)前記処理C1)で前記第1の所定時間の間の或る第1の機会に前記誤測位の可能性が推定されなかったならば、前記第1の機会に再取得された高感度での位置情報を、前記現在位置情報として選択し(S420−S414、S620−S615)、前記処理C2)で前記第2の所定時間の間の或る第2の機会に前記低感度での位置情報が取得されたならば、前記第2の機会に取得された低感度での位置情報を、前記現在位置情報として選択する(S421−S414、S621−S615)、
を実行する、
測位装置。
【請求項3】
請求項2記載の測位装置において、
前記測位制御装置は、前記処理A)を実行するとき、前記処理A)で取得された高感度での位置情報と最近過去に実行された処理D)で出力又は記憶された過去の位置情報との間の距離を算出し、前記算出された距離に基づいて、前記誤測位の可能性があるか否かを推定する
測位装置。
【請求項4】
請求項2又は3記載の測位装置において、
前記第2の所定時間が前記第1の所定時間より短い
測位装置。
【請求項5】
請求項2〜4のいずれか一項記載の測位装置において、
前記測位制御装置は、前記処理C)を実行するとき、最初に前記処理C1)を実行し(S404−S407)、 前記最初に実行された処理C1)で全ての機会に前記誤測位の可能性が推定されたならば(S406でNo)、前記処理C2)を実行し(S408−S411)、そうでなければ(S406でYes)、前記処理C2)の実行を省略する、
測位装置。
【請求項6】
請求項2〜5のいずれか一項記載の測位装置において、
前記測位制御装置は、前記処理C)を1回実行した結果、前記処理C1)で全ての機会に前記誤測位の可能性が推定され(S406でNo)、かつ前記処理C2)ですべての機会に前記低感度での位置情報が取得できなかったならば(S410でNo)、前記処理C)を再度実行する(S401、S412)、
測位装置。
【請求項7】
請求項6記載の測位装置において、
前記測位制御装置は、前記処理C)を所定のループ回数まで繰り返した結果、まだなお、前記処理C1)で全ての機会に前記誤測位の可能性が推定され、かつ前記処理C2)ですべての機会に前記低感度での位置情報が取得できなかったならば、最近過去に実行された処理D)で選択された過去の位置情報を、再度、前記現在位置情報として選択する(S413−S414)、
測位装置。
【請求項8】
請求項2〜7のいずれか一項記載の測位装置において、
前記航法衛星センサの前記高感度の受信機能は、所定の第1の電力値又はSN比値より大きい又は高い電力又は受信SN比をもつ衛星信号のみを測位に使用し、
前記低感度の受信機能は、所定の第2の電力値又はSN比値より大きい又は高い電力又は受信SN比をもつ衛星信号のみを測位に使用し、
前記第2の電力値又はSN比値が、前記第1の電力値又はSN比値より大きい又は高い、
測位装置。
【請求項9】
請求項2〜7のいずれか一項記載の測位装置において、
前記航法衛星センサの前記高感度の受信機能は、所定の第1の仰角値より大きい仰角の方向に位置する衛星からの衛星信号のみを測位に使用し、
前記低感度の受信機能は、所定の第2の仰角値より大きい仰角の方向に位置する衛星からの衛星信号のみを測位に使用し、
前記第2の仰角値が、前記第1の仰角値より大きい、
測位装置。
【請求項10】
請求項2〜7のいずれか一項記載の測位装置において、
前記航法衛星センサの前記高感度の受信機能は、電力の大きい順において第1位から第1の順位までの電力をもつ衛星からの衛星信号のみを測位に使用し、
前記低感度の受信機能は、前記電力の大きい順において第1位から第2の順位までの電力をもつ衛星からの衛星信号のみを測位に使用し、
前記第2の順位が、前記第1の順位より高い、
測位装置。
【請求項11】
請求項2〜4のいずれか一項記載の測位装置において、
前記測位制御装置は、前記処理C)を実行するとき、前記処理C1)(S602−S607)と前記処理C2)(S608−S611)とを並行的に実行し、前記処理C1で取得されかつ前記誤測位の可能性が推定されない位置情報と、前記処理C2)で取得される位置情報のうち、いずれか先に取得された方を、前記現在位置情報として選択する(S620−S625、S621−S615)、
測位装置。
【請求項12】
移動体(1)の位置を測定する測位方法であって、
前記移動体上で、航法衛星システムの複数の衛星から送信された衛星信号を受信して、高感度での位置情報と低感度での位置情報を、選択的に又は並行的に出力する航法衛星センシングステップと、
前記高感度での位置情報と前記低感度での位置情報とを選択的に又は並行的に取得して、前記高感度での位置情報と前記低感度での位置情報のいずれか一方を、前記移動体の現在位置を示す現在位置情報として選択する測位制御ステップと、
を有し、
前記測位制御ステップは、
過去の前記測位制御ステップにおいて取得した位置情報と、前記航法衛星センシングステップにて前記高感度での位置情報と前記低感度での位置情報とを選択的に又は並行的に取得した現在位置情報との距離の差分の値に基づいて、前記現在位置情報が誤測位であるか否かを推定し、誤測位であると推定されたならば、所定時間を経過した後に、前記衛星信号受信機能を高感度から低感度あるいは低感度から高感度へと切り替える、
測位方法。
【請求項13】
移動体(1)に搭載され、前記移動体の現在位置を測定する測位装置であって、
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度の衛星信号受信機能を有し、前記高感度の衛星信号受信機能を使って演算された高感度での位置情報を出力する第1の航法衛星センサ(701)と、
前記航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、低感度の衛星信号受信機能を有し、前記低感度の衛星信号受信機能を使って演算された低感度での位置情報を出力する第2の航法衛星センサ(702)と、
前記第1と第2の航法衛星センサから高感度と低感度の自己位置情報を取得し、前記取得された高感度と低感度の自己位置情報を使用して、前記移動体の現在位置を決定する測位制御部と、
を備えた測位装置。
【請求項14】
移動体の現在位置を測定する測位方法であって、
前記移動体に搭載された第1の航法衛星センサ(701)から、少なくとも高感度での位置情報を取得するステップと、
前記移動体に搭載された第2の航法衛星センサ(702)から、少なくとも低感度での位置情報を取得するステップと、
前記取得された高感度と低感度の自己位置情報を使用して、前記移動体の現在位置を決定するステップと、
を有する測位方法。
【請求項15】
請求項1または2に記載の測位装置を備えた建設機械。
【請求項1】
移動体(1)に搭載され、前記移動体の位置を測定する測位装置(10と16)であって、
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度と低感度の衛星信号受信機能を有し、前記高感度の衛星信号受信機能を使って演算された高感度での位置情報と、前記低感度の衛星信号受信機能を使って演算された低感度での位置情報とを、選択的に又は並行的に出力する航法衛星センサ(16)と、
前記航法衛星センサから前記高感度での位置情報と前記低感度での位置情報とを選択的に又は並行的に取得して、前記高感度での位置情報と前記低感度での位置情報のいずれか一方を、前記移動体の現在位置を示す現在位置情報として選択する測位制御装置(10)と、
を備え、
前記測位制御装置(10)は、
前記測位制御装置(10)が過去に取得した位置情報と、前記航法衛星センサから前記高感度での位置情報と前記低感度での位置情報とを選択的に又は並行的に取得した現在位置情報との距離の差分の値に基づいて、前記現在位置情報が誤測位であるか否かを推定し、誤測位であると推定されたならば、所定時間を経過した後に、前記衛星信号受信機能を高感度から低感度あるいは低感度から高感度へと切り替える、
測位装置。
【請求項2】
請求項1記載の測位装置において、
前記測位制御装置は、以下の処理A)からD)、
A)前記衛星航法センサから前記高感度での位置情報を取得して、前記取得された高感度での位置情報に誤測位の可能性があるか否か推定し(S402−S403、S603−S603)、
B)前記処理A)で前記誤測位の可能性が推定されないときには、前記取得された高感度での位置情報を、前記現在位置情報として選択し(S400、S620)、
C)前記処理A)で前記誤測位の可能性が推定されたときには、その後に、
C1)第1の所定時間の間の1回以上の機会に、前記衛星航法センサから前記高感度での位置情報を再取得して、前記再取得された高感度での位置情報に誤測位の可能性があるか否か推定する第1の処理と(S404−S407、S604−S607)、
C2)第2の所定時間の間の1回以上の機会に、前記衛星航法センサから前記低感度での位置情報の取得を試みる第2の処理と(S408−S411、S608−S611)、
を処理C)として逐次的にまたは並行的に行い、
D)前記処理C1)で前記第1の所定時間の間の或る第1の機会に前記誤測位の可能性が推定されなかったならば、前記第1の機会に再取得された高感度での位置情報を、前記現在位置情報として選択し(S420−S414、S620−S615)、前記処理C2)で前記第2の所定時間の間の或る第2の機会に前記低感度での位置情報が取得されたならば、前記第2の機会に取得された低感度での位置情報を、前記現在位置情報として選択する(S421−S414、S621−S615)、
を実行する、
測位装置。
【請求項3】
請求項2記載の測位装置において、
前記測位制御装置は、前記処理A)を実行するとき、前記処理A)で取得された高感度での位置情報と最近過去に実行された処理D)で出力又は記憶された過去の位置情報との間の距離を算出し、前記算出された距離に基づいて、前記誤測位の可能性があるか否かを推定する
測位装置。
【請求項4】
請求項2又は3記載の測位装置において、
前記第2の所定時間が前記第1の所定時間より短い
測位装置。
【請求項5】
請求項2〜4のいずれか一項記載の測位装置において、
前記測位制御装置は、前記処理C)を実行するとき、最初に前記処理C1)を実行し(S404−S407)、 前記最初に実行された処理C1)で全ての機会に前記誤測位の可能性が推定されたならば(S406でNo)、前記処理C2)を実行し(S408−S411)、そうでなければ(S406でYes)、前記処理C2)の実行を省略する、
測位装置。
【請求項6】
請求項2〜5のいずれか一項記載の測位装置において、
前記測位制御装置は、前記処理C)を1回実行した結果、前記処理C1)で全ての機会に前記誤測位の可能性が推定され(S406でNo)、かつ前記処理C2)ですべての機会に前記低感度での位置情報が取得できなかったならば(S410でNo)、前記処理C)を再度実行する(S401、S412)、
測位装置。
【請求項7】
請求項6記載の測位装置において、
前記測位制御装置は、前記処理C)を所定のループ回数まで繰り返した結果、まだなお、前記処理C1)で全ての機会に前記誤測位の可能性が推定され、かつ前記処理C2)ですべての機会に前記低感度での位置情報が取得できなかったならば、最近過去に実行された処理D)で選択された過去の位置情報を、再度、前記現在位置情報として選択する(S413−S414)、
測位装置。
【請求項8】
請求項2〜7のいずれか一項記載の測位装置において、
前記航法衛星センサの前記高感度の受信機能は、所定の第1の電力値又はSN比値より大きい又は高い電力又は受信SN比をもつ衛星信号のみを測位に使用し、
前記低感度の受信機能は、所定の第2の電力値又はSN比値より大きい又は高い電力又は受信SN比をもつ衛星信号のみを測位に使用し、
前記第2の電力値又はSN比値が、前記第1の電力値又はSN比値より大きい又は高い、
測位装置。
【請求項9】
請求項2〜7のいずれか一項記載の測位装置において、
前記航法衛星センサの前記高感度の受信機能は、所定の第1の仰角値より大きい仰角の方向に位置する衛星からの衛星信号のみを測位に使用し、
前記低感度の受信機能は、所定の第2の仰角値より大きい仰角の方向に位置する衛星からの衛星信号のみを測位に使用し、
前記第2の仰角値が、前記第1の仰角値より大きい、
測位装置。
【請求項10】
請求項2〜7のいずれか一項記載の測位装置において、
前記航法衛星センサの前記高感度の受信機能は、電力の大きい順において第1位から第1の順位までの電力をもつ衛星からの衛星信号のみを測位に使用し、
前記低感度の受信機能は、前記電力の大きい順において第1位から第2の順位までの電力をもつ衛星からの衛星信号のみを測位に使用し、
前記第2の順位が、前記第1の順位より高い、
測位装置。
【請求項11】
請求項2〜4のいずれか一項記載の測位装置において、
前記測位制御装置は、前記処理C)を実行するとき、前記処理C1)(S602−S607)と前記処理C2)(S608−S611)とを並行的に実行し、前記処理C1で取得されかつ前記誤測位の可能性が推定されない位置情報と、前記処理C2)で取得される位置情報のうち、いずれか先に取得された方を、前記現在位置情報として選択する(S620−S625、S621−S615)、
測位装置。
【請求項12】
移動体(1)の位置を測定する測位方法であって、
前記移動体上で、航法衛星システムの複数の衛星から送信された衛星信号を受信して、高感度での位置情報と低感度での位置情報を、選択的に又は並行的に出力する航法衛星センシングステップと、
前記高感度での位置情報と前記低感度での位置情報とを選択的に又は並行的に取得して、前記高感度での位置情報と前記低感度での位置情報のいずれか一方を、前記移動体の現在位置を示す現在位置情報として選択する測位制御ステップと、
を有し、
前記測位制御ステップは、
過去の前記測位制御ステップにおいて取得した位置情報と、前記航法衛星センシングステップにて前記高感度での位置情報と前記低感度での位置情報とを選択的に又は並行的に取得した現在位置情報との距離の差分の値に基づいて、前記現在位置情報が誤測位であるか否かを推定し、誤測位であると推定されたならば、所定時間を経過した後に、前記衛星信号受信機能を高感度から低感度あるいは低感度から高感度へと切り替える、
測位方法。
【請求項13】
移動体(1)に搭載され、前記移動体の現在位置を測定する測位装置であって、
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度の衛星信号受信機能を有し、前記高感度の衛星信号受信機能を使って演算された高感度での位置情報を出力する第1の航法衛星センサ(701)と、
前記航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、低感度の衛星信号受信機能を有し、前記低感度の衛星信号受信機能を使って演算された低感度での位置情報を出力する第2の航法衛星センサ(702)と、
前記第1と第2の航法衛星センサから高感度と低感度の自己位置情報を取得し、前記取得された高感度と低感度の自己位置情報を使用して、前記移動体の現在位置を決定する測位制御部と、
を備えた測位装置。
【請求項14】
移動体の現在位置を測定する測位方法であって、
前記移動体に搭載された第1の航法衛星センサ(701)から、少なくとも高感度での位置情報を取得するステップと、
前記移動体に搭載された第2の航法衛星センサ(702)から、少なくとも低感度での位置情報を取得するステップと、
前記取得された高感度と低感度の自己位置情報を使用して、前記移動体の現在位置を決定するステップと、
を有する測位方法。
【請求項15】
請求項1または2に記載の測位装置を備えた建設機械。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−127923(P2012−127923A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−282186(P2010−282186)
【出願日】平成22年12月17日(2010.12.17)
【出願人】(000001236)株式会社小松製作所 (1,686)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月17日(2010.12.17)
【出願人】(000001236)株式会社小松製作所 (1,686)
【Fターム(参考)】
[ Back to top ]