
測位装置、歩幅データ補正方法およびプログラム
【課題】 この発明は、移動量の計測にGPSを利用することなくユーザの歩幅を求めて歩幅データを補正することのできる測位装置、その歩幅データ補正方法およびプログラムを提供する。
【解決手段】 被写体の撮影を行う撮影手段と、加速度を検出する加速度センサと、方位を計測する方位センサと、歩幅データを記憶する歩幅データ記憶手段と、直線状の移動経路上の複数の地点(X1,X2)でそれぞれ行われた撮影の情報に基づき複数の地点(X1,X2)間の距離を算出する距離算出手段と、この距離とこの移動中に計数された歩数に基づいて歩幅データを補正する歩幅補正手段とを備えている。
【解決手段】 被写体の撮影を行う撮影手段と、加速度を検出する加速度センサと、方位を計測する方位センサと、歩幅データを記憶する歩幅データ記憶手段と、直線状の移動経路上の複数の地点(X1,X2)でそれぞれ行われた撮影の情報に基づき複数の地点(X1,X2)間の距離を算出する距離算出手段と、この距離とこの移動中に計数された歩数に基づいて歩幅データを補正する歩幅補正手段とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、歩行体の測位を行う測位装置、ならびに、その歩幅データ補正方法およびプログラムに関する。
【背景技術】
【0002】
以前より、加速度センサによりユーザが歩行する際の上下動を検出して歩数を計数するとともに、この歩数に予め設定されている歩幅データを乗算することでユーザの移動量を算出するようにした移動量測定装置、ならびに、このような移動量の算出を利用して移動地点の測位を行う測位装置がある。
【0003】
このような装置においては、歩幅データの誤差が移動量の算出結果の誤差として積算されていくため、歩幅データの誤差は小さくする必要がある。
【0004】
従来の移動量測定装置の中には、例えば、ユーザに身長を入力させ、身長から歩幅を推定して歩幅データを自動的に設定するものがあった。
【0005】
また、本願発明に関連する従来技術として、特許文献1には、平坦路を直進歩行する際に始端地点と終端地点とをGPS(全地球測位システム)により測位するとともに、この間の歩数を計数し、始端地点から終端地点までの距離を、計数された歩数で除算することで、歩幅データを求めるようにした技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平11−194033号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
GPSを利用して正確な歩幅データを求めるには、GPSの測位誤差(例えば10m以上)の影響を少なくするため、相当に長い距離を直進して歩幅データを求めなければならないという課題が生じる。
【0008】
また、GPS衛星の信号受信には比較的に大きな消費電力を要し、また、ビルの谷間などでGPS衛星の信号受信を行えないところも多々あることから、GPSを利用せずに比較的に正確な歩幅データを求める技術が要求されることもある。
【0009】
この発明は、移動量の計測にGPSを利用せずに比較的に正確なユーザの歩幅を求めて歩幅データを補正することのできる測位装置、その歩幅データ補正方法およびプログラムを提供することにある。
【課題を解決するための手段】
【0010】
本発明は、上記目的を達成するため、
被写体の撮影を行う撮影手段と、
加速度を検出する加速度センサと、
方位を計測する方位センサと、
予め設定された歩幅データを記憶する歩幅データ記憶手段と、
前記加速度センサの検出に基づき計数される歩数と前記歩幅データとから移動量を算出するとともに前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行う測位手段と、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出手段と、
前記距離算出手段により算出された前記複数の地点間の距離と前記複数の地点間の移動で計数された歩数とに基づいて前記歩幅データを補正する歩幅補正手段と、
を備えたことを特徴とする測位装置である。
【発明の効果】
【0011】
本発明によれば、撮影の状況を表わす撮影情報に基づいて撮影地点から被写体までの比較的に正確な距離を算出することができるという見地に基づき、複数の地点で行われた撮影の撮影情報から、これら複数の地点間の距離を算出し、この算出された距離と歩数とから比較的に正確なユーザの歩幅を求めて、歩幅データを補正することができる。従って、移動量の計測にGPSを利用せずに比較的正確に歩幅データを補正できるという効果が得られる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態の測位機能付きのデジタルカメラの全体構成を示すブロック図である。
【図2】CPUにより実行されるデジタルカメラのメイン制御処理の制御手順を示すフローチャートである。
【図3】図2のステップS14の歩幅アジャスト処理の詳細な制御手順を示すフローチャートである。
【図4】歩幅アジャスト処理の流れを説明するもので、(a)〜(c)はその第1段階〜第3段階を示す説明図である。
【図5】歩幅アジャスト処理の流れを説明するもので、(a)〜(c)はその第4段階〜第6段階を示す説明図である。
【図6】歩幅アジャスト処理における2回の撮影時点のフォーカス調整位置の概要を示す説明図である。
【図7】撮影地点と信号機との相対的な位置関係を説明する図を示す。
【図8】図7の状態を上方から眺めた平面図である。
【図9】図7の状態を進行方向に対して直角な横方向から眺めた図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態を図面に基づいて説明する。
【0014】
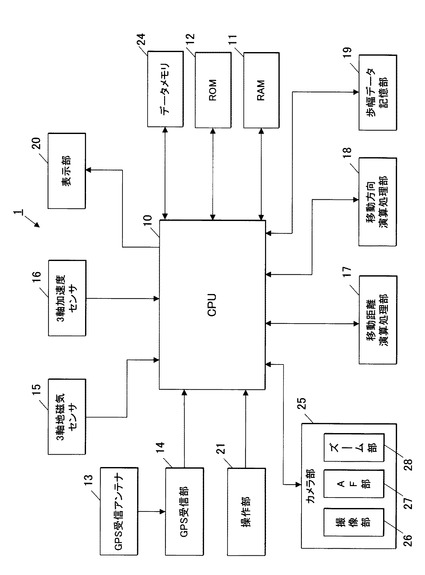
図1は、本発明の実施形態の測位機能付きデジタルカメラ1の全体構成を示すブロック図である。
【0015】
この実施形態のデジタルカメラ1は、GPS(全地球測位システム)とモーションセンサを利用した自律航法とにより測位を行う測位装置として機能するものであり、図1に示すように、装置の全体的な制御を行うCPU(中央演算処理装置)10と、CPU10に作業用のメモリ空間を提供するRAM(Random Access Memory)11と、CPU10が実行する制御プログラムや制御データを記憶したROM(Read Only Memory)12と、GPS衛星の信号を受信するGPS受信アンテナ13と、受信信号に基づき現在位置の測位演算を行うGPS受信部14と、モーションセンサである3軸地磁気センサ15および3軸加速度センサ16と、自律航法の測位のために移動距離の演算処理を行う移動距離演算処理部17と、自律航法の測位のために移動方向の演算処理を行う移動方向演算処理部18と、ユーザの歩幅を表わす予め設定された歩幅データを記憶する歩幅データ記憶部19と、液晶ディスプレーなど画像の表示を行う表示部20と、ユーザからの操作指令を入力する操作部21と、画像データ等を記憶するデータメモリ24と、撮影を行うカメラ部(撮影手段)25等を備えている。
【0016】
3軸地磁気センサ15は、互いに直交する3軸方向の地磁気の大きさを検出するセンサであり、3軸加速度センサ16は、互いに直交する3軸方向の加速度の大きさを検出するセンサである。これらのセンサ出力は、所定の周波数でサンプリングされてCPU10に取り込まれ、CPU10から移動距離演算処理部17や移動方向演算処理部18に送られる。
【0017】
カメラ部25には、投射された撮影映像を電気信号に変換するとともにデータ化して撮影画像データを生成する撮像部26と、フォーカスレンズを移動させて撮像部26に投影される撮影映像のフォーカスを自動調整するオートフォーカス部27と、ズームレンズを移動させて画角を変化させることで撮影映像を拡大縮小するズーム部28等が設けられている。
【0018】
移動距離演算処理部17と移動方向演算処理部18とは、CPU10を補助する演算装置であり、CPU10を介して入力される3軸加速度センサ16と3軸地磁気センサ15の計測データを解析して、ユーザの歩行による移動量と移動方向を算出する。
【0019】
具体的には、移動距離演算処理部17は、3軸加速度センサ16の計測データを平均化することで重力方向を検出するとともに、計測データから重力方向の大きな加速度変化を抽出することで、歩みの動作を識別して歩数を計数する。そして、歩幅データ記憶部19に記憶されている歩幅データと歩数とを乗算することで移動量を算出する。
【0020】
移動方向演算処理部18は、歩行時に3軸加速度センサ16の計測データに現れる前方への大きな加速度変化と、左右の小さな加速度変化とを抽出することで、移動方向が3軸加速度センサ16の何れの向きであるかを算出する。さらに、3軸地磁気センサ15による北の方位検出と、3軸加速度センサ16の重力方向の検出とから、これらセンサ15,16の3軸方向が地球上の何れの方向を向いているのかを算出し、これらの結果を合わせて移動方向を方位により算出する。
【0021】
CPU10は、移動距離演算処理部17と移動方向演算処理部18とに上記の演算処理を連続的に実行させるとともに、例えばGPS受信部14により算出された絶対位置データに、上記演算処理によって求められた移動距離および移動方向からなる移動ベクトルを積算させていくことで、現在の移動地点の位置データを算出していく。このCPU10の演算処理機能と、移動距離演算処理部17および移動方向演算処理部18により自律航法による測位手段が構成される。
【0022】
操作部21には、カメラ部25に撮影処理を実行させるシャッターボタンと、撮影映像を拡大縮小するためのズームレバーと、デジタルカメラ1の動作モードの変更や各種の設定入力を行うための操作ボタン等が設けられている。
【0023】
ROM12には、測位を行いながらユーザの操作に応じて撮影、撮影画像の再生および各種の設定処理を行うメイン制御処理のプログラムと、ユーザの実際の歩幅を計測して歩幅データを補正する歩幅アジャスト処理のプログラム等が格納されている。これらのプログラムは、ROM12に格納するほか、例えば、データ読取装置を介してCPU10が読み取り可能な、例えば、光ディスク等の可搬型記憶媒体、フラッシュメモリ等の不揮発性メモリに格納しておくことが可能である。また、このようなプログラムを、キャリアウェーブ(搬送波)を媒体として通信回線を介してデジタルカメラ1にダウンロードされる形態を適用することもできる。
【0024】
次に、上記構成のデジタルカメラ1の動作について説明する。
【0025】
[メイン制御処理]
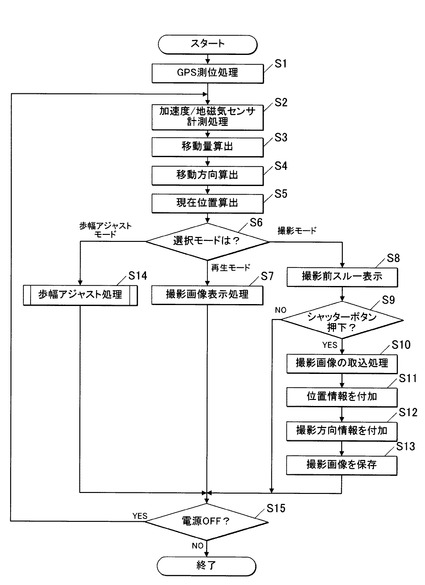
図2には、CPU10により実行されるメイン制御処理のフローチャートを示す。
【0026】
CPU10は、メイン制御処理において、現在位置の測定を行いながら、ユーザにより選択された動作モードの処理を実行していく。メイン制御処理が開始されると、先ず、CPU10は、GPS受信部14に信号の受信と測位演算とを行わせて現在地点の絶対位置データを取得する(ステップS1)。その後、CPU10は、自律航法による測位の処理(ステップS2〜S5)と、選択中の動作モードの処理(ステップS6〜S14)とを、判別処理(ステップS5)で電源オフと判別されるまで繰り返し実行する。
【0027】
自律航法の測位処理(ステップS2〜S5)へ移行すると、先ず、CPU10は、3軸加速度センサ16と3軸地磁気センサ15との計測データを入力して移動距離演算処理部17と移動方向演算処理部18に送り(ステップS2)、移動距離演算処理部17に移動距離を算出させ(ステップS3)、移動方向演算処理部18に移動方向を算出させる(ステップS4)。そして、これらの算出結果から移動ベクトルを生成し直前の移動地点を表わす絶対位置データに積算して現在の移動地点を表わす絶対位置データを求める(ステップS5)。これらの処理が繰り返し実行されることで、移動経路に沿った各地点の位置データが求められていく。
【0028】
続いて、CPU10は、選択されている動作モードに応じた分岐処理(ステップS6)を行う。ここで、再生モードが選択されていれば、データメモリ24に記憶されている撮影画像データをユーザの操作に応じて表示部20に表示させる撮影画像表示処理(ステップS7)を実行する。この撮影画像表示処理は、操作部21からの操作信号の入力処理や再生処理など1段階の処理を行って、次のステップへ移行する。そして、ステップS2〜S7,S15の処理ループによりこの撮影画像表示処理が繰り返し実行されることで、再生モードの一連の処理が実現されるようになっている。
【0029】
一方、撮影モードが選択されていれば、ステップS6の分岐処理でステップS8へ移行して、先ず、撮像部26にこの時点で取り込まれている映像を表示部20へ出力する撮影前スルー表示処理を実行する(ステップS8)。このスルー表示処理では、ユーザのズームレバー操作が行われた場合にズーム部28を駆動して画角を変更したり、シャッターボタンの半押しの操作によりオートフォーカス部27を駆動してフォーカス調整したりする処理が併せて実行される。
【0030】
次いで、操作部21のシャッターボタンの押下(全押し)がなされたか判別し(ステップS9)、押下がなければ、そのままステップS15に移行する。一方、押下があれば撮像部26から撮影画像データを取り込み(ステップS10)、この時点の移動地点の位置データおよび撮影方向データを撮影画像データに付加し(ステップS11,S12)、この撮影画像データをデータメモリ24へ記憶させる(ステップS13)。そして、ステップS15へ移行する。このような撮影モードの処理が、ステップS2〜S6,S8〜S13の処理ループで繰り返し実行されることで、ユーザはスルー表示を見ながら撮影画像の構図や範囲を調整して撮影を行うことができる。
【0031】
一方、ステップS6の分岐処理で、歩幅アジャストモードが選択されていれば、歩幅データの補正を行う歩幅アジャスト処理を実行する(ステップS14)。歩幅アジャスト処理については、次に説明する。そして、歩幅アジャスト処理を完了したら、歩幅アジャストモードの選択が解除されてステップS15に移行する。
【0032】
上述の自律航法による測位処理(ステップS2〜S5)と、選択モードに応じた処理(ステップS6以降)との処理ループの途中で、電源オフの操作が行われると、ステップS15の判別処理で“YES”側に進んでメイン制御処理が終了となる。
【0033】
[歩幅アジャスト処理]
図3には、図2のステップS14で実行される歩幅アジャスト処理のフローチャートを示す。図4と図5には、歩幅アジャスト処理の流れを示す説明図を示す。図4(a)〜(c)はその第1段階〜第3段階を、図5(a)〜(c)はその第4段階〜第6段階を示す。
【0034】
歩幅アジャスト処理は、ユーザに直進移動をさせながら2つの地点で同一の信号機を撮影させることで、先ず、各撮影地点から信号機までの距離を算出し、この算出結果から2つの撮影地点間の移動距離を算出して、それによりユーザの歩幅を求めて歩幅データを補正するものである。
【0035】
撮影地点から信号機までの距離は、二種類の方法を用いて算出する。第1の方法は、信号機の青、黄、赤のカラーパネルの直径(所定部位の長さ)が、東京地区では25cm、その他の地区では30cmと一定である点を利用したもので、撮影画像中における信号機のカラーパネルの大きさと撮影の画角とから、撮影地点から信号機までの距離を求めるものである。画角はズームレンズのレンズ位置から決定することができる。
【0036】
信号機までの距離の第2の算出方法は、フォーカスの調整状態からピントの合った被写体までの距離を特定することができる点を利用したもので、信号機に焦点を合わせて撮影を行い、その時点におけるフォーカスレンズの位置を抽出して、このデータから撮影地点から信号機までの距離を求めるものである。
【0037】
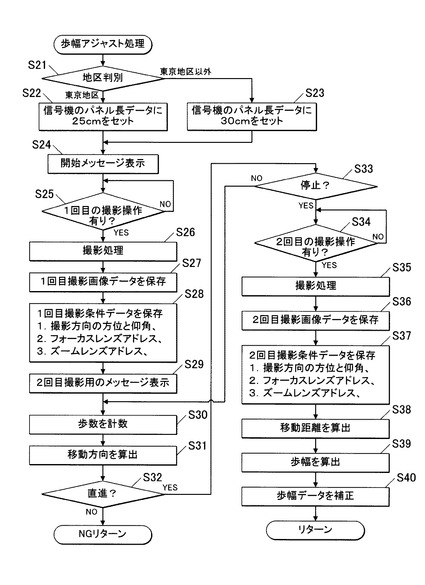
歩幅アジャスト処理に移行すると、先ず、CPU10は、現在位置の測位結果から、この時点におけるユーザの存在地区を判別し(ステップS21:地域判別手段)、東京地区であれば信号機のパネル長データに25cmを設定し(ステップS22)、それ以外の地区であれば信号機のパネル長データに30cmを設定する(ステップS23)。
【0038】
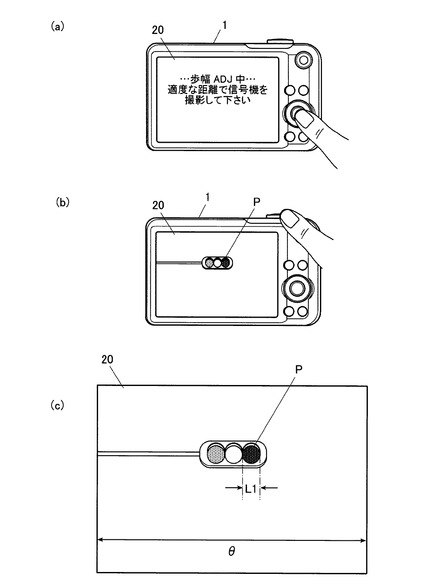
次いで、CPU10は、図4(a)に示すように、歩幅アジャスト処理中であることの通知とユーザに信号機の撮影を促すためのメッセージ表示を表示部20に行う(ステップS24)。そして、撮影操作が行われるのを待機して(ステップS25)、撮影操作がなされたら撮影処理を行う(ステップS26)。撮影処理では、図4(b)に示すように、ユーザは近くの信号機を画面中央に合わせてオートフォーカス部27により信号機にフォーカスが合わされた状態で撮影が行われる。
【0039】
撮影処理が行われたら、CPU10は、後に距離を算出するために撮影画像データをRAM11に保存し(ステップS27)、さらに、1回目の撮影条件データを取得してRAM11に保存する(ステップS28)。ここで取得する撮影条件データには、3軸地磁気センサ15と3軸加速度センサ16の計測データからCPU10が算出した撮影方向の方位および仰角のデータ、オートフォーカス部27のフォーカスレンズの位置を表わすフォーカスレンズアドレス、ズーム部28のズームレンズの位置を表わすズームレンズアドレスが含まれる。
【0040】
図4(c)に示すように、上記の撮影画像データにおいて、撮影画像の左端から右端までの画角θはズームレンズアドレスにより決定され、信号機のカラーパネルPの実際の直径は25cm又は30cmと既知の長さである。画角が一定であれば、カラーパネルPの撮影画像上での長さL1は、信号機までの距離に応じて変化する。従って、CPU10が、ズームレンズアドレスから画角θを求め、画像認識処理によりカラーパネルPの撮影画像上での長さL1を計測することで、これら画角θとカラーパネルPの長さL1とを所定の演算式に代入して、撮影地点から信号機までの距離を算出することができる。
【0041】
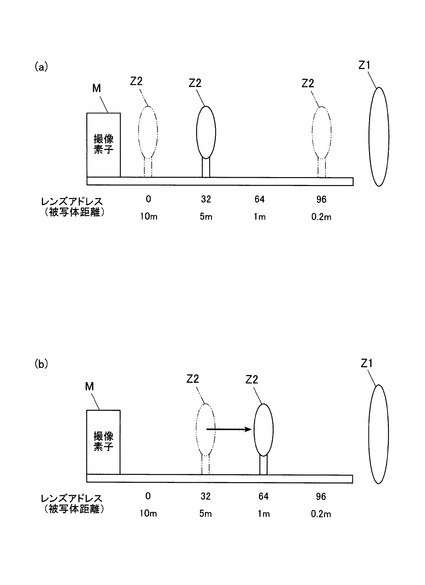
図6には、歩幅アジャスト処理の第1回目(a)と第2回目(b)の撮影時点におけるフォーカス調整位置の概要をそれぞれ表わした説明図を示す。この図において、Mは撮像部26の撮像素子、Z1はズーム部28のズームレンズ、Z2はオートフォーカス部27のフォーカスレンズである。
【0042】
図6に示すように、ピントの合った被写体までの距離は撮像素子Mに対するフォーカスレンズZ2の位置により決定される。例えば、図6に示すように、フォーカスレンズZ2の位置を表わすレンズアドレスと、ピントの合った被写体までの距離とは一対一の関係であり、フォーカスレンズZ2のレンズアドレスに基づき撮影地点から信号機までの距離を算出することができる。なお、パンフォーカスの状態など被写界深度が非常に長い場合には、フォーカスレンズZ2の位置から距離を算出することは困難になる。
【0043】
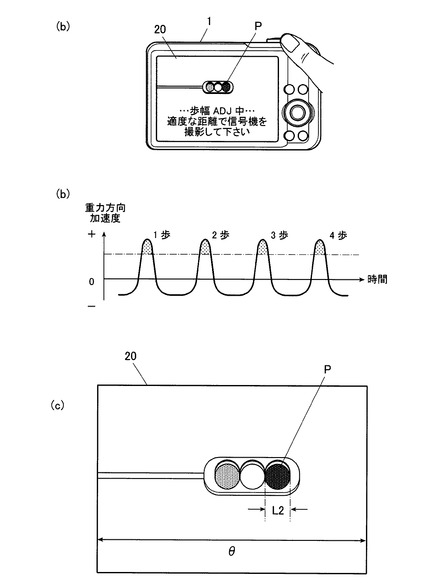
図3のステップS26〜S28で1回目の信号機の撮影を行ってデータの保存を行ったら、次に、CPU10は、図5(a)に示すように、ユーザに信号機に近づいて2回目の撮影を行うよう促すメッセージ表示を表示部20に行う(ステップS29)。
【0044】
ここで、ユーザは歩行を始めるので、図5(b)に示すように、3軸加速度センサ16の計測データから重力方向の加速度変化を抽出して歩数をカウントし(ステップS30)、また、3軸加速度センサ16と3軸地磁気センサ15の計測データを移動方向演算処理部18に送って移動方向を算出させる(ステップS31)。
【0045】
続いて、CPU10は移動方向の算出結果からユーザが直進しているか確認し(ステップS32)、直進が確認されれば加速度変化からユーザが停止したか判別する(ステップS33)。ここで、ユーザが直進していないと判別されたら、歩幅データの補正を不成功として歩幅アジャスト処理を終了する。また、直進していて停止していないと判別されれば、ステップS30に戻って歩数と移動方向の算出を繰り返し実行する。
【0046】
そして、ユーザが数歩直進した後に停止すると、ステップS33でそれが判別されて、“YES”側へ進む。すると、CPU10は2回目の撮影操作がなされるのを待機して(ステップS34)、撮影操作がなされたら撮影処理を行う(ステップS35)。撮影処理においては、ユーザは、図5(c)に示すように、同一の信号機を画面中央に合わせてオートフォーカス部27により信号機にフォーカスが合わされた状態で撮影を行う。
【0047】
撮影処理が行われたら、CPU10は、後に距離を算出するためにこの撮影画像データをRAM11に保存し(ステップS36)、さらに、2回目の撮影条件データを取得してRAM11に保存する(ステップS37)。撮影条件データには、1回目の撮影のときと同様に、3軸地磁気センサ15と3軸加速度センサ16の計測データからCPU10が算出した撮影方向の方位と仰角のデータ、オートフォーカス部27のフォーカスレンズの位置を表わすフォーカスレンズアドレス、ズーム部28のズームレンズの位置を表わすズームレンズアドレスが含まれる。さらに、移動方向のデータもRAM11に保存される。
【0048】
上記の2回目の撮影においても、1回目の撮影のときと同様に、撮影画像データとズームレンズアドレスに基づき画角θとカラーパネルの撮影画像上の長さL2が求められて、これらのパラメータから信号機までの距離を算出することができる。図4(c)→図5(c)に示すように、信号機に近づいていることで、2回目の撮影のときの方がカラーパネルの撮影画像上の長さL2が大きくなっている。
【0049】
また、この2回目の撮影においても、1回目の撮影のときと同様に、フォーカスレンズアドレスからピントの合った信号機までの距離を算出することができる。図6(a)→(b)に示すように、信号機に近づいただけその距離に応じてフォーカスレンズZ2の位置も移動している。
【0050】
次に、CPU10は、上記のようにRAM11に保存した1回目と2回目の撮影画像データおよび撮影条件データに基づいて、1回目の撮影地点から2回目の撮影地点までの移動距離を算出する(ステップS38:距離算出手段)。次に、移動距離の算出方法について説明する。
【0051】
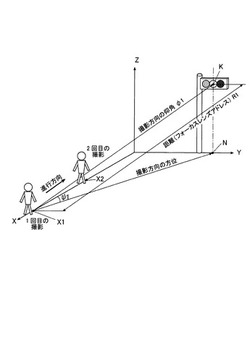
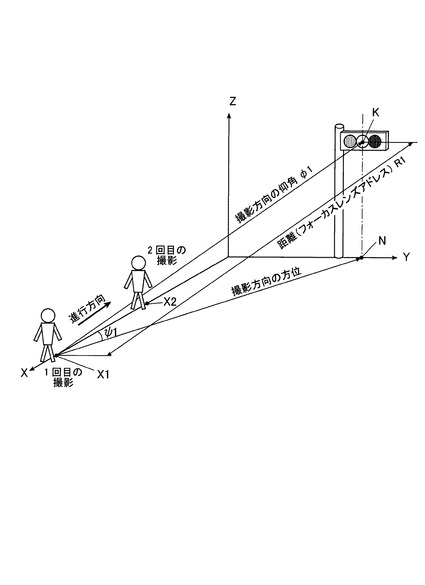
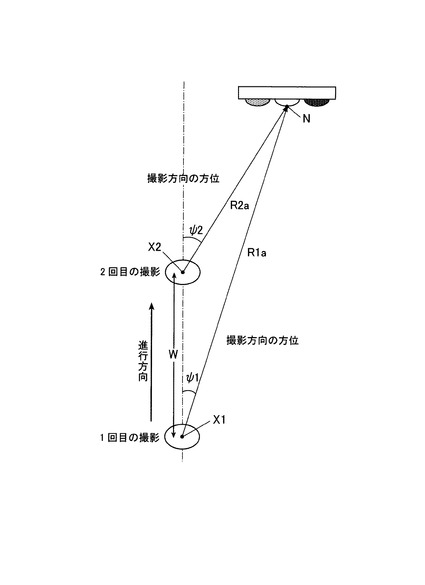
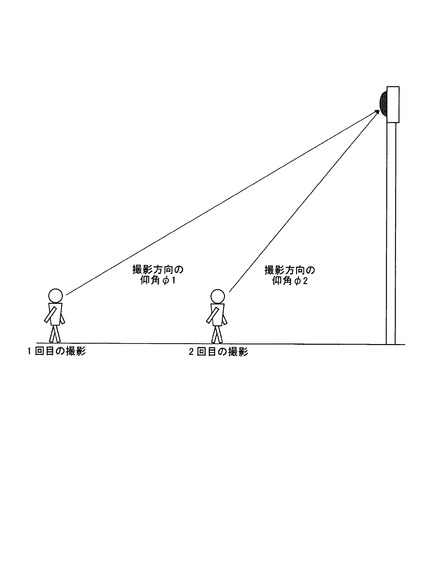
図7には、撮影地点と信号機との相対的な位置関係を説明する図を示す。図8は、図7の状態を上方から眺めた平面図、図9は、図7の状態を進行方向に対して直角な横方向から眺めた図である。
【0052】
図7に示すように、1回目の撮影においては、撮影方向の仰角と方位、撮影地点から信号機までの距離が既知のパラメータである。また、2回目の撮影においても同様のパラメータが既知になっている。ここで、1回目と2回目の撮影における、信号機までの距離をR1,R2、撮影方向の仰角をφ1,φ2(図9参照)、進行方向を基準とした撮影方向の方位までの角度をψ1,ψ2(図8参照)と表わす。信号機までの距離R1,R2は、上述したように2つの方式によりそれぞれ求められるため、誤差の少ないほうを採用したり、誤差が同程度であれば平均した値を採用したりする。
【0053】
ここで、図7〜図9に示すように撮影地点から信号機までの線分“X1−K”、“X2−K”をXY平面上へ写像した線分“X1−N”、“X2−N”の長さR1a,R2a(図8参照)は、次式(1)、(2)のように求められる。
R1a = R1×cosφ1 ・・・ (1)
R2a = R2×cosφ2 ・・・ (2)
【0054】
そして、図8に示すように、1回目と2回目の撮影地点X1,X2の距離Wは、次式(3)のように求められる。
W = R1a×cosψ1 − R2a×cosψ2 ・・・ (3)
【0055】
ステップS38では、このような演算を行って、1回目の撮影地点から2回目の撮影地点までの移動距離を算出する。移動距離を算出したら、次いで、CPU10は、ステップS30で計数していた歩数で移動距離を除算して歩幅を算出し(ステップS39)、歩幅データ記憶部19の歩幅データをこの値に補正する(ステップS40:歩幅補正手段)。
【0056】
以上のように、この実施形態の測位機能付きデジタルカメラ1によれば、ユーザに複数地点で撮影を行わせて、これら撮影の状況を表わす撮影情報(撮影画像データと撮影条件データ)に基づき複数の地点間の移動距離を算出してユーザの歩幅を求めるようにしているので、GPSが利用できない環境でも歩幅データの補正を行うことが可能となる。また、GPSを利用する場合と比較して短い距離を直進移動するだけで正確な歩幅を求めることができる。
【0057】
また、この実施形態の測位機能付きデジタルカメラ1では、同一の被写体を複数の撮影地点で撮影することで、撮影情報からこの間の移動距離を算出するようにしているので、撮影情報だけから比較的に正確な移動距離を算出することができる。
【0058】
なお、同一の被写体を撮影するのではなく、互いの距離が既知である2つの被写体(例えば1個目の信号と2個目の信号)を撮影して、ユーザに2つの被写体の距離を入力させることで、これらの情報をあわせてユーザの移動距離を算出して歩幅データの補正を行うことも可能である。
【0059】
また、この実施形態の測位機能付きデジタルカメラ1では、撮影条件データとして、フォーカスレンズアドレス、撮影方向の仰角と方位の情報を記憶しておき、また、移動方向の情報も記憶しておき、これらの情報から移動距離を算出するように構成されているので、斜め上方の被写体を撮影するような場合でも、正確にユーザの移動距離を算出することができる。
【0060】
また、この実施形態の測位機能付きデジタルカメラ1では、カラーパネルの大きさが既知である信号機を撮影し、撮影画像上の信号機の大きさと、撮影時の画角を表わすズームレンズアドレスとを記憶しておき、これらの情報から撮影地点から信号機までの距離を算出する処理も行っている。従って、パンフォーカスの状態などフォーカスレンズの位置から距離を求めることが困難な場合でも、被写体までの距離を算出することができる。また、信号機のカラーパネルはカラーコントラストが強く画像認識もしやすいため、被写体までの距離を間違いなく算出することができる。
【0061】
また、この実施形態の測位機能付きデジタルカメラ1では、東京地区とそれ以外の地区との判別を行い、この判別結果に応じて信号機のカラーパネルの長さデータを切り換えて、信号機までの距離の算出に使用しているので、地区ごとのカラーパネルの長さの違いも考慮して、被写体までの距離を正しく算出することができる。
【0062】
なお、本発明は、上記実施の形態に限られるものではなく、様々な変更が可能である。例えば、上記実施形態では、移動距離を算出するために信号機を被写体として撮影する例を示したが、例えば、目立つ看板などを被写体として適用したり、停止した人を被写体として適用したりすることもできる。また、ユーザの進行方向にデジタルカメラと水平な位置にある物体を被写体として適用する場合には、撮影方向の方位および仰角、移動方向の情報は移動距離を算出するための情報として省くことができる。
【0063】
また、上記実施の形態では、2つの地点で撮影を行って2つの地点間の距離を算出するようにしているが、3つ以上の地点で撮影を行って、各地点間の距離を算出するとともに、平均化処理など誤差を除去する処理を行って、ユーザの歩幅をより高い精度で算出するようにしても良い。
【0064】
また、上記実施形態では、東京地区とそれ以外の地区との判別を、位置測定の結果から自動的に判別するようにしているが、例えば、ユーザに地区データを設定入力させて、この設定データに基づいて地区の判別を行うようにしても良い。また、方位センサとして、3軸地磁気センサを例示したが、GPSにより移動方向の方位を計測しジャイロスコープにより移動方向の変化量を計測することで方位の測定を行う構成を適用することもできる。その他、実施の形態で示した細部等は発明の趣旨を逸脱しない範囲で適宜変更可能である。
【0065】
また、上記実施形態では、単に画角θとカラーパネルPの撮影画像上の長さから、信号機までの距離を算出するとしたが、実際には、カラーパネルPは、信号機のカラーパネルPに対する撮影方向によって歪んで楕円形状となる。よって、カラーパネルPの撮影画像上の長さを歪んだ楕円形状の長径として、ユーザの歩幅をより高い精度で算出するようにしても良い。
【0066】
また、上記実施例では、単に2つの地点で撮影を行っていたが、2回目の撮影時に1回目の撮影の半透明画像をスルー表示させて被写体を特定させるようにしても良い。
【0067】
また、上記実施形態では、2つの地点で1つの被写体の撮影を行って2つの地点間の距離を算出するようにしているが、2つの地点で、複数の被写体の撮影を行って、2つの地点間の距離を算出するとともに、平均化処理など誤差を除去する処理を行って、ユーザの歩幅をより高い精度で算出するようにしても良い。
【0068】
本発明のいくつかの実施形態を説明したが、本発明の範囲は、上述の実施の形態に限定するものではなく、特許請求の範囲に記載された発明の範囲とその均等の範囲を含む。以下に、この出願の願書に最初に添付した特許請求の範囲に記載した発明を付記する。付記に記載した請求項の項番は、この出願の願書に最初に添付した特許請求の範囲の通りである。
【0069】
[付記]
<請求項1>
被写体の撮影を行う撮影手段と、
加速度を検出する加速度センサと、
方位を計測する方位センサと、
予め設定された歩幅データを記憶する歩幅データ記憶手段と、
前記加速度センサの検出に基づき計数される歩数と前記歩幅データとから移動量を算出するとともに前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行う測位手段と、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出手段と、
前記距離算出手段により算出された前記複数の地点間の距離と前記複数の地点間の移動で計数された歩数とに基づいて前記歩幅データを補正する歩幅補正手段と、
を備えたことを特徴とする測位装置。
<請求項2>
前記距離算出手段は、
前記撮影手段により前記複数の地点で同一の被写体に対してそれぞれ行われた撮影の状況を表わす前記撮影情報から前記複数の地点間の距離を算出する
ことを特徴とする請求項1記載の測位装置。
<請求項3>
前記撮影情報には、
前記撮影手段のフォーカス調整位置に基づき算出される被写体までの距離の情報と、撮影方向を表わす方位と仰角の情報と、前記移動経路の方向の情報とが含まれることを特徴とする請求項1又は2に記載の測位装置。
<請求項4>
前記同一の被写体は、信号機であり、
前記撮影情報には、撮影画像上での前記信号機の所定部位の長さの情報と、撮影時の画角の情報とが含まれることを特徴とする請求項2に記載の測位装置。
<請求項5>
前記撮影画像上での前記信号機の所定部位の長さの情報は、信号機のカラーパネルの撮影画面上の長径としたことを特徴とする請求項4記載の測位装置。
<請求項6>
前記信号機の前記所定部位の長さが第1長さと定められている第1地域と第2長さと定められている第2地域とを判別する地域判別手段を備え、
前記距離算出手段は、
前記地域判別手段により判別された地域に応じて前記信号機の前記所定部位の長さの情報を前記第1長さと前記第2長さとに切り換えて前記複数の地点間の距離を算出することを特徴とする請求項4記載の測位装置。
<請求項7>
前記撮影手段により取得された画像を表示する表示手段を備え、
前記撮影手段により前記複数の地点で同一の被写体に対してそれぞれ撮影を行う場合に、2回目の以降の撮影時に、1回目の撮影画像を前記表示手段に表示することを特徴とする請求項2〜6の何れか一項に記載の測位装置。
<請求項8>
加速度を検出する加速度センサと、方位を計測する方位センサとを備え、前記加速度センサの検出に基づき計数される歩数と予め設定された歩幅データとから移動量を算出し、前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行うとともに、被写体の撮影を行う撮影手段を有する測位装置で、前記歩幅データを補正する歩幅データ補正方法であって、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出ステップと、
前記距離算出ステップにより算出された前記複数の地点間の距離に基づいて前記歩幅データを補正する歩幅補正ステップと、
を含んでいることを特徴とする歩幅データ補正方法。
<請求項9>
加速度を検出する加速度センサと、方位を計測する方位センサと、前記加速度センサの検出に基づき計数される歩数と予め設定された歩幅データとから移動量を算出し、前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行う測位手段と、被写体の撮影を行う撮影手段とを制御するコンピュータに、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出機能と、
前記距離算出機能により算出された前記複数の地点間の距離に基づいて前記歩幅データを補正する歩幅補正機能と、
を実現させるプログラム。
【符号の説明】
【0070】
1 デジタルカメラ
10 CPU(プログラムを実行するコンピュータ)
11 RAM
12 ROM
13 GPS受信アンテナ
14 GPS受信部
15 3軸地磁気センサ(方位センサ)
16 3軸加速度センサ(加速度センサ)
17 移動距離演算処理部
18 移動方向演算処理部
19 歩幅データ記憶部(歩幅データ記憶手段)
20 表示部
21 操作部
25 カメラ部
26 撮像部
27 オートフォーカス部
28 ズーム部
P 信号機のカラーパネル
M 撮像素子
Z1 ズームレンズ
Z2 フォーカスレンズ
【技術分野】
【0001】
この発明は、歩行体の測位を行う測位装置、ならびに、その歩幅データ補正方法およびプログラムに関する。
【背景技術】
【0002】
以前より、加速度センサによりユーザが歩行する際の上下動を検出して歩数を計数するとともに、この歩数に予め設定されている歩幅データを乗算することでユーザの移動量を算出するようにした移動量測定装置、ならびに、このような移動量の算出を利用して移動地点の測位を行う測位装置がある。
【0003】
このような装置においては、歩幅データの誤差が移動量の算出結果の誤差として積算されていくため、歩幅データの誤差は小さくする必要がある。
【0004】
従来の移動量測定装置の中には、例えば、ユーザに身長を入力させ、身長から歩幅を推定して歩幅データを自動的に設定するものがあった。
【0005】
また、本願発明に関連する従来技術として、特許文献1には、平坦路を直進歩行する際に始端地点と終端地点とをGPS(全地球測位システム)により測位するとともに、この間の歩数を計数し、始端地点から終端地点までの距離を、計数された歩数で除算することで、歩幅データを求めるようにした技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平11−194033号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
GPSを利用して正確な歩幅データを求めるには、GPSの測位誤差(例えば10m以上)の影響を少なくするため、相当に長い距離を直進して歩幅データを求めなければならないという課題が生じる。
【0008】
また、GPS衛星の信号受信には比較的に大きな消費電力を要し、また、ビルの谷間などでGPS衛星の信号受信を行えないところも多々あることから、GPSを利用せずに比較的に正確な歩幅データを求める技術が要求されることもある。
【0009】
この発明は、移動量の計測にGPSを利用せずに比較的に正確なユーザの歩幅を求めて歩幅データを補正することのできる測位装置、その歩幅データ補正方法およびプログラムを提供することにある。
【課題を解決するための手段】
【0010】
本発明は、上記目的を達成するため、
被写体の撮影を行う撮影手段と、
加速度を検出する加速度センサと、
方位を計測する方位センサと、
予め設定された歩幅データを記憶する歩幅データ記憶手段と、
前記加速度センサの検出に基づき計数される歩数と前記歩幅データとから移動量を算出するとともに前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行う測位手段と、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出手段と、
前記距離算出手段により算出された前記複数の地点間の距離と前記複数の地点間の移動で計数された歩数とに基づいて前記歩幅データを補正する歩幅補正手段と、
を備えたことを特徴とする測位装置である。
【発明の効果】
【0011】
本発明によれば、撮影の状況を表わす撮影情報に基づいて撮影地点から被写体までの比較的に正確な距離を算出することができるという見地に基づき、複数の地点で行われた撮影の撮影情報から、これら複数の地点間の距離を算出し、この算出された距離と歩数とから比較的に正確なユーザの歩幅を求めて、歩幅データを補正することができる。従って、移動量の計測にGPSを利用せずに比較的正確に歩幅データを補正できるという効果が得られる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態の測位機能付きのデジタルカメラの全体構成を示すブロック図である。
【図2】CPUにより実行されるデジタルカメラのメイン制御処理の制御手順を示すフローチャートである。
【図3】図2のステップS14の歩幅アジャスト処理の詳細な制御手順を示すフローチャートである。
【図4】歩幅アジャスト処理の流れを説明するもので、(a)〜(c)はその第1段階〜第3段階を示す説明図である。
【図5】歩幅アジャスト処理の流れを説明するもので、(a)〜(c)はその第4段階〜第6段階を示す説明図である。
【図6】歩幅アジャスト処理における2回の撮影時点のフォーカス調整位置の概要を示す説明図である。
【図7】撮影地点と信号機との相対的な位置関係を説明する図を示す。
【図8】図7の状態を上方から眺めた平面図である。
【図9】図7の状態を進行方向に対して直角な横方向から眺めた図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態を図面に基づいて説明する。
【0014】
図1は、本発明の実施形態の測位機能付きデジタルカメラ1の全体構成を示すブロック図である。
【0015】
この実施形態のデジタルカメラ1は、GPS(全地球測位システム)とモーションセンサを利用した自律航法とにより測位を行う測位装置として機能するものであり、図1に示すように、装置の全体的な制御を行うCPU(中央演算処理装置)10と、CPU10に作業用のメモリ空間を提供するRAM(Random Access Memory)11と、CPU10が実行する制御プログラムや制御データを記憶したROM(Read Only Memory)12と、GPS衛星の信号を受信するGPS受信アンテナ13と、受信信号に基づき現在位置の測位演算を行うGPS受信部14と、モーションセンサである3軸地磁気センサ15および3軸加速度センサ16と、自律航法の測位のために移動距離の演算処理を行う移動距離演算処理部17と、自律航法の測位のために移動方向の演算処理を行う移動方向演算処理部18と、ユーザの歩幅を表わす予め設定された歩幅データを記憶する歩幅データ記憶部19と、液晶ディスプレーなど画像の表示を行う表示部20と、ユーザからの操作指令を入力する操作部21と、画像データ等を記憶するデータメモリ24と、撮影を行うカメラ部(撮影手段)25等を備えている。
【0016】
3軸地磁気センサ15は、互いに直交する3軸方向の地磁気の大きさを検出するセンサであり、3軸加速度センサ16は、互いに直交する3軸方向の加速度の大きさを検出するセンサである。これらのセンサ出力は、所定の周波数でサンプリングされてCPU10に取り込まれ、CPU10から移動距離演算処理部17や移動方向演算処理部18に送られる。
【0017】
カメラ部25には、投射された撮影映像を電気信号に変換するとともにデータ化して撮影画像データを生成する撮像部26と、フォーカスレンズを移動させて撮像部26に投影される撮影映像のフォーカスを自動調整するオートフォーカス部27と、ズームレンズを移動させて画角を変化させることで撮影映像を拡大縮小するズーム部28等が設けられている。
【0018】
移動距離演算処理部17と移動方向演算処理部18とは、CPU10を補助する演算装置であり、CPU10を介して入力される3軸加速度センサ16と3軸地磁気センサ15の計測データを解析して、ユーザの歩行による移動量と移動方向を算出する。
【0019】
具体的には、移動距離演算処理部17は、3軸加速度センサ16の計測データを平均化することで重力方向を検出するとともに、計測データから重力方向の大きな加速度変化を抽出することで、歩みの動作を識別して歩数を計数する。そして、歩幅データ記憶部19に記憶されている歩幅データと歩数とを乗算することで移動量を算出する。
【0020】
移動方向演算処理部18は、歩行時に3軸加速度センサ16の計測データに現れる前方への大きな加速度変化と、左右の小さな加速度変化とを抽出することで、移動方向が3軸加速度センサ16の何れの向きであるかを算出する。さらに、3軸地磁気センサ15による北の方位検出と、3軸加速度センサ16の重力方向の検出とから、これらセンサ15,16の3軸方向が地球上の何れの方向を向いているのかを算出し、これらの結果を合わせて移動方向を方位により算出する。
【0021】
CPU10は、移動距離演算処理部17と移動方向演算処理部18とに上記の演算処理を連続的に実行させるとともに、例えばGPS受信部14により算出された絶対位置データに、上記演算処理によって求められた移動距離および移動方向からなる移動ベクトルを積算させていくことで、現在の移動地点の位置データを算出していく。このCPU10の演算処理機能と、移動距離演算処理部17および移動方向演算処理部18により自律航法による測位手段が構成される。
【0022】
操作部21には、カメラ部25に撮影処理を実行させるシャッターボタンと、撮影映像を拡大縮小するためのズームレバーと、デジタルカメラ1の動作モードの変更や各種の設定入力を行うための操作ボタン等が設けられている。
【0023】
ROM12には、測位を行いながらユーザの操作に応じて撮影、撮影画像の再生および各種の設定処理を行うメイン制御処理のプログラムと、ユーザの実際の歩幅を計測して歩幅データを補正する歩幅アジャスト処理のプログラム等が格納されている。これらのプログラムは、ROM12に格納するほか、例えば、データ読取装置を介してCPU10が読み取り可能な、例えば、光ディスク等の可搬型記憶媒体、フラッシュメモリ等の不揮発性メモリに格納しておくことが可能である。また、このようなプログラムを、キャリアウェーブ(搬送波)を媒体として通信回線を介してデジタルカメラ1にダウンロードされる形態を適用することもできる。
【0024】
次に、上記構成のデジタルカメラ1の動作について説明する。
【0025】
[メイン制御処理]
図2には、CPU10により実行されるメイン制御処理のフローチャートを示す。
【0026】
CPU10は、メイン制御処理において、現在位置の測定を行いながら、ユーザにより選択された動作モードの処理を実行していく。メイン制御処理が開始されると、先ず、CPU10は、GPS受信部14に信号の受信と測位演算とを行わせて現在地点の絶対位置データを取得する(ステップS1)。その後、CPU10は、自律航法による測位の処理(ステップS2〜S5)と、選択中の動作モードの処理(ステップS6〜S14)とを、判別処理(ステップS5)で電源オフと判別されるまで繰り返し実行する。
【0027】
自律航法の測位処理(ステップS2〜S5)へ移行すると、先ず、CPU10は、3軸加速度センサ16と3軸地磁気センサ15との計測データを入力して移動距離演算処理部17と移動方向演算処理部18に送り(ステップS2)、移動距離演算処理部17に移動距離を算出させ(ステップS3)、移動方向演算処理部18に移動方向を算出させる(ステップS4)。そして、これらの算出結果から移動ベクトルを生成し直前の移動地点を表わす絶対位置データに積算して現在の移動地点を表わす絶対位置データを求める(ステップS5)。これらの処理が繰り返し実行されることで、移動経路に沿った各地点の位置データが求められていく。
【0028】
続いて、CPU10は、選択されている動作モードに応じた分岐処理(ステップS6)を行う。ここで、再生モードが選択されていれば、データメモリ24に記憶されている撮影画像データをユーザの操作に応じて表示部20に表示させる撮影画像表示処理(ステップS7)を実行する。この撮影画像表示処理は、操作部21からの操作信号の入力処理や再生処理など1段階の処理を行って、次のステップへ移行する。そして、ステップS2〜S7,S15の処理ループによりこの撮影画像表示処理が繰り返し実行されることで、再生モードの一連の処理が実現されるようになっている。
【0029】
一方、撮影モードが選択されていれば、ステップS6の分岐処理でステップS8へ移行して、先ず、撮像部26にこの時点で取り込まれている映像を表示部20へ出力する撮影前スルー表示処理を実行する(ステップS8)。このスルー表示処理では、ユーザのズームレバー操作が行われた場合にズーム部28を駆動して画角を変更したり、シャッターボタンの半押しの操作によりオートフォーカス部27を駆動してフォーカス調整したりする処理が併せて実行される。
【0030】
次いで、操作部21のシャッターボタンの押下(全押し)がなされたか判別し(ステップS9)、押下がなければ、そのままステップS15に移行する。一方、押下があれば撮像部26から撮影画像データを取り込み(ステップS10)、この時点の移動地点の位置データおよび撮影方向データを撮影画像データに付加し(ステップS11,S12)、この撮影画像データをデータメモリ24へ記憶させる(ステップS13)。そして、ステップS15へ移行する。このような撮影モードの処理が、ステップS2〜S6,S8〜S13の処理ループで繰り返し実行されることで、ユーザはスルー表示を見ながら撮影画像の構図や範囲を調整して撮影を行うことができる。
【0031】
一方、ステップS6の分岐処理で、歩幅アジャストモードが選択されていれば、歩幅データの補正を行う歩幅アジャスト処理を実行する(ステップS14)。歩幅アジャスト処理については、次に説明する。そして、歩幅アジャスト処理を完了したら、歩幅アジャストモードの選択が解除されてステップS15に移行する。
【0032】
上述の自律航法による測位処理(ステップS2〜S5)と、選択モードに応じた処理(ステップS6以降)との処理ループの途中で、電源オフの操作が行われると、ステップS15の判別処理で“YES”側に進んでメイン制御処理が終了となる。
【0033】
[歩幅アジャスト処理]
図3には、図2のステップS14で実行される歩幅アジャスト処理のフローチャートを示す。図4と図5には、歩幅アジャスト処理の流れを示す説明図を示す。図4(a)〜(c)はその第1段階〜第3段階を、図5(a)〜(c)はその第4段階〜第6段階を示す。
【0034】
歩幅アジャスト処理は、ユーザに直進移動をさせながら2つの地点で同一の信号機を撮影させることで、先ず、各撮影地点から信号機までの距離を算出し、この算出結果から2つの撮影地点間の移動距離を算出して、それによりユーザの歩幅を求めて歩幅データを補正するものである。
【0035】
撮影地点から信号機までの距離は、二種類の方法を用いて算出する。第1の方法は、信号機の青、黄、赤のカラーパネルの直径(所定部位の長さ)が、東京地区では25cm、その他の地区では30cmと一定である点を利用したもので、撮影画像中における信号機のカラーパネルの大きさと撮影の画角とから、撮影地点から信号機までの距離を求めるものである。画角はズームレンズのレンズ位置から決定することができる。
【0036】
信号機までの距離の第2の算出方法は、フォーカスの調整状態からピントの合った被写体までの距離を特定することができる点を利用したもので、信号機に焦点を合わせて撮影を行い、その時点におけるフォーカスレンズの位置を抽出して、このデータから撮影地点から信号機までの距離を求めるものである。
【0037】
歩幅アジャスト処理に移行すると、先ず、CPU10は、現在位置の測位結果から、この時点におけるユーザの存在地区を判別し(ステップS21:地域判別手段)、東京地区であれば信号機のパネル長データに25cmを設定し(ステップS22)、それ以外の地区であれば信号機のパネル長データに30cmを設定する(ステップS23)。
【0038】
次いで、CPU10は、図4(a)に示すように、歩幅アジャスト処理中であることの通知とユーザに信号機の撮影を促すためのメッセージ表示を表示部20に行う(ステップS24)。そして、撮影操作が行われるのを待機して(ステップS25)、撮影操作がなされたら撮影処理を行う(ステップS26)。撮影処理では、図4(b)に示すように、ユーザは近くの信号機を画面中央に合わせてオートフォーカス部27により信号機にフォーカスが合わされた状態で撮影が行われる。
【0039】
撮影処理が行われたら、CPU10は、後に距離を算出するために撮影画像データをRAM11に保存し(ステップS27)、さらに、1回目の撮影条件データを取得してRAM11に保存する(ステップS28)。ここで取得する撮影条件データには、3軸地磁気センサ15と3軸加速度センサ16の計測データからCPU10が算出した撮影方向の方位および仰角のデータ、オートフォーカス部27のフォーカスレンズの位置を表わすフォーカスレンズアドレス、ズーム部28のズームレンズの位置を表わすズームレンズアドレスが含まれる。
【0040】
図4(c)に示すように、上記の撮影画像データにおいて、撮影画像の左端から右端までの画角θはズームレンズアドレスにより決定され、信号機のカラーパネルPの実際の直径は25cm又は30cmと既知の長さである。画角が一定であれば、カラーパネルPの撮影画像上での長さL1は、信号機までの距離に応じて変化する。従って、CPU10が、ズームレンズアドレスから画角θを求め、画像認識処理によりカラーパネルPの撮影画像上での長さL1を計測することで、これら画角θとカラーパネルPの長さL1とを所定の演算式に代入して、撮影地点から信号機までの距離を算出することができる。
【0041】
図6には、歩幅アジャスト処理の第1回目(a)と第2回目(b)の撮影時点におけるフォーカス調整位置の概要をそれぞれ表わした説明図を示す。この図において、Mは撮像部26の撮像素子、Z1はズーム部28のズームレンズ、Z2はオートフォーカス部27のフォーカスレンズである。
【0042】
図6に示すように、ピントの合った被写体までの距離は撮像素子Mに対するフォーカスレンズZ2の位置により決定される。例えば、図6に示すように、フォーカスレンズZ2の位置を表わすレンズアドレスと、ピントの合った被写体までの距離とは一対一の関係であり、フォーカスレンズZ2のレンズアドレスに基づき撮影地点から信号機までの距離を算出することができる。なお、パンフォーカスの状態など被写界深度が非常に長い場合には、フォーカスレンズZ2の位置から距離を算出することは困難になる。
【0043】
図3のステップS26〜S28で1回目の信号機の撮影を行ってデータの保存を行ったら、次に、CPU10は、図5(a)に示すように、ユーザに信号機に近づいて2回目の撮影を行うよう促すメッセージ表示を表示部20に行う(ステップS29)。
【0044】
ここで、ユーザは歩行を始めるので、図5(b)に示すように、3軸加速度センサ16の計測データから重力方向の加速度変化を抽出して歩数をカウントし(ステップS30)、また、3軸加速度センサ16と3軸地磁気センサ15の計測データを移動方向演算処理部18に送って移動方向を算出させる(ステップS31)。
【0045】
続いて、CPU10は移動方向の算出結果からユーザが直進しているか確認し(ステップS32)、直進が確認されれば加速度変化からユーザが停止したか判別する(ステップS33)。ここで、ユーザが直進していないと判別されたら、歩幅データの補正を不成功として歩幅アジャスト処理を終了する。また、直進していて停止していないと判別されれば、ステップS30に戻って歩数と移動方向の算出を繰り返し実行する。
【0046】
そして、ユーザが数歩直進した後に停止すると、ステップS33でそれが判別されて、“YES”側へ進む。すると、CPU10は2回目の撮影操作がなされるのを待機して(ステップS34)、撮影操作がなされたら撮影処理を行う(ステップS35)。撮影処理においては、ユーザは、図5(c)に示すように、同一の信号機を画面中央に合わせてオートフォーカス部27により信号機にフォーカスが合わされた状態で撮影を行う。
【0047】
撮影処理が行われたら、CPU10は、後に距離を算出するためにこの撮影画像データをRAM11に保存し(ステップS36)、さらに、2回目の撮影条件データを取得してRAM11に保存する(ステップS37)。撮影条件データには、1回目の撮影のときと同様に、3軸地磁気センサ15と3軸加速度センサ16の計測データからCPU10が算出した撮影方向の方位と仰角のデータ、オートフォーカス部27のフォーカスレンズの位置を表わすフォーカスレンズアドレス、ズーム部28のズームレンズの位置を表わすズームレンズアドレスが含まれる。さらに、移動方向のデータもRAM11に保存される。
【0048】
上記の2回目の撮影においても、1回目の撮影のときと同様に、撮影画像データとズームレンズアドレスに基づき画角θとカラーパネルの撮影画像上の長さL2が求められて、これらのパラメータから信号機までの距離を算出することができる。図4(c)→図5(c)に示すように、信号機に近づいていることで、2回目の撮影のときの方がカラーパネルの撮影画像上の長さL2が大きくなっている。
【0049】
また、この2回目の撮影においても、1回目の撮影のときと同様に、フォーカスレンズアドレスからピントの合った信号機までの距離を算出することができる。図6(a)→(b)に示すように、信号機に近づいただけその距離に応じてフォーカスレンズZ2の位置も移動している。
【0050】
次に、CPU10は、上記のようにRAM11に保存した1回目と2回目の撮影画像データおよび撮影条件データに基づいて、1回目の撮影地点から2回目の撮影地点までの移動距離を算出する(ステップS38:距離算出手段)。次に、移動距離の算出方法について説明する。
【0051】
図7には、撮影地点と信号機との相対的な位置関係を説明する図を示す。図8は、図7の状態を上方から眺めた平面図、図9は、図7の状態を進行方向に対して直角な横方向から眺めた図である。
【0052】
図7に示すように、1回目の撮影においては、撮影方向の仰角と方位、撮影地点から信号機までの距離が既知のパラメータである。また、2回目の撮影においても同様のパラメータが既知になっている。ここで、1回目と2回目の撮影における、信号機までの距離をR1,R2、撮影方向の仰角をφ1,φ2(図9参照)、進行方向を基準とした撮影方向の方位までの角度をψ1,ψ2(図8参照)と表わす。信号機までの距離R1,R2は、上述したように2つの方式によりそれぞれ求められるため、誤差の少ないほうを採用したり、誤差が同程度であれば平均した値を採用したりする。
【0053】
ここで、図7〜図9に示すように撮影地点から信号機までの線分“X1−K”、“X2−K”をXY平面上へ写像した線分“X1−N”、“X2−N”の長さR1a,R2a(図8参照)は、次式(1)、(2)のように求められる。
R1a = R1×cosφ1 ・・・ (1)
R2a = R2×cosφ2 ・・・ (2)
【0054】
そして、図8に示すように、1回目と2回目の撮影地点X1,X2の距離Wは、次式(3)のように求められる。
W = R1a×cosψ1 − R2a×cosψ2 ・・・ (3)
【0055】
ステップS38では、このような演算を行って、1回目の撮影地点から2回目の撮影地点までの移動距離を算出する。移動距離を算出したら、次いで、CPU10は、ステップS30で計数していた歩数で移動距離を除算して歩幅を算出し(ステップS39)、歩幅データ記憶部19の歩幅データをこの値に補正する(ステップS40:歩幅補正手段)。
【0056】
以上のように、この実施形態の測位機能付きデジタルカメラ1によれば、ユーザに複数地点で撮影を行わせて、これら撮影の状況を表わす撮影情報(撮影画像データと撮影条件データ)に基づき複数の地点間の移動距離を算出してユーザの歩幅を求めるようにしているので、GPSが利用できない環境でも歩幅データの補正を行うことが可能となる。また、GPSを利用する場合と比較して短い距離を直進移動するだけで正確な歩幅を求めることができる。
【0057】
また、この実施形態の測位機能付きデジタルカメラ1では、同一の被写体を複数の撮影地点で撮影することで、撮影情報からこの間の移動距離を算出するようにしているので、撮影情報だけから比較的に正確な移動距離を算出することができる。
【0058】
なお、同一の被写体を撮影するのではなく、互いの距離が既知である2つの被写体(例えば1個目の信号と2個目の信号)を撮影して、ユーザに2つの被写体の距離を入力させることで、これらの情報をあわせてユーザの移動距離を算出して歩幅データの補正を行うことも可能である。
【0059】
また、この実施形態の測位機能付きデジタルカメラ1では、撮影条件データとして、フォーカスレンズアドレス、撮影方向の仰角と方位の情報を記憶しておき、また、移動方向の情報も記憶しておき、これらの情報から移動距離を算出するように構成されているので、斜め上方の被写体を撮影するような場合でも、正確にユーザの移動距離を算出することができる。
【0060】
また、この実施形態の測位機能付きデジタルカメラ1では、カラーパネルの大きさが既知である信号機を撮影し、撮影画像上の信号機の大きさと、撮影時の画角を表わすズームレンズアドレスとを記憶しておき、これらの情報から撮影地点から信号機までの距離を算出する処理も行っている。従って、パンフォーカスの状態などフォーカスレンズの位置から距離を求めることが困難な場合でも、被写体までの距離を算出することができる。また、信号機のカラーパネルはカラーコントラストが強く画像認識もしやすいため、被写体までの距離を間違いなく算出することができる。
【0061】
また、この実施形態の測位機能付きデジタルカメラ1では、東京地区とそれ以外の地区との判別を行い、この判別結果に応じて信号機のカラーパネルの長さデータを切り換えて、信号機までの距離の算出に使用しているので、地区ごとのカラーパネルの長さの違いも考慮して、被写体までの距離を正しく算出することができる。
【0062】
なお、本発明は、上記実施の形態に限られるものではなく、様々な変更が可能である。例えば、上記実施形態では、移動距離を算出するために信号機を被写体として撮影する例を示したが、例えば、目立つ看板などを被写体として適用したり、停止した人を被写体として適用したりすることもできる。また、ユーザの進行方向にデジタルカメラと水平な位置にある物体を被写体として適用する場合には、撮影方向の方位および仰角、移動方向の情報は移動距離を算出するための情報として省くことができる。
【0063】
また、上記実施の形態では、2つの地点で撮影を行って2つの地点間の距離を算出するようにしているが、3つ以上の地点で撮影を行って、各地点間の距離を算出するとともに、平均化処理など誤差を除去する処理を行って、ユーザの歩幅をより高い精度で算出するようにしても良い。
【0064】
また、上記実施形態では、東京地区とそれ以外の地区との判別を、位置測定の結果から自動的に判別するようにしているが、例えば、ユーザに地区データを設定入力させて、この設定データに基づいて地区の判別を行うようにしても良い。また、方位センサとして、3軸地磁気センサを例示したが、GPSにより移動方向の方位を計測しジャイロスコープにより移動方向の変化量を計測することで方位の測定を行う構成を適用することもできる。その他、実施の形態で示した細部等は発明の趣旨を逸脱しない範囲で適宜変更可能である。
【0065】
また、上記実施形態では、単に画角θとカラーパネルPの撮影画像上の長さから、信号機までの距離を算出するとしたが、実際には、カラーパネルPは、信号機のカラーパネルPに対する撮影方向によって歪んで楕円形状となる。よって、カラーパネルPの撮影画像上の長さを歪んだ楕円形状の長径として、ユーザの歩幅をより高い精度で算出するようにしても良い。
【0066】
また、上記実施例では、単に2つの地点で撮影を行っていたが、2回目の撮影時に1回目の撮影の半透明画像をスルー表示させて被写体を特定させるようにしても良い。
【0067】
また、上記実施形態では、2つの地点で1つの被写体の撮影を行って2つの地点間の距離を算出するようにしているが、2つの地点で、複数の被写体の撮影を行って、2つの地点間の距離を算出するとともに、平均化処理など誤差を除去する処理を行って、ユーザの歩幅をより高い精度で算出するようにしても良い。
【0068】
本発明のいくつかの実施形態を説明したが、本発明の範囲は、上述の実施の形態に限定するものではなく、特許請求の範囲に記載された発明の範囲とその均等の範囲を含む。以下に、この出願の願書に最初に添付した特許請求の範囲に記載した発明を付記する。付記に記載した請求項の項番は、この出願の願書に最初に添付した特許請求の範囲の通りである。
【0069】
[付記]
<請求項1>
被写体の撮影を行う撮影手段と、
加速度を検出する加速度センサと、
方位を計測する方位センサと、
予め設定された歩幅データを記憶する歩幅データ記憶手段と、
前記加速度センサの検出に基づき計数される歩数と前記歩幅データとから移動量を算出するとともに前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行う測位手段と、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出手段と、
前記距離算出手段により算出された前記複数の地点間の距離と前記複数の地点間の移動で計数された歩数とに基づいて前記歩幅データを補正する歩幅補正手段と、
を備えたことを特徴とする測位装置。
<請求項2>
前記距離算出手段は、
前記撮影手段により前記複数の地点で同一の被写体に対してそれぞれ行われた撮影の状況を表わす前記撮影情報から前記複数の地点間の距離を算出する
ことを特徴とする請求項1記載の測位装置。
<請求項3>
前記撮影情報には、
前記撮影手段のフォーカス調整位置に基づき算出される被写体までの距離の情報と、撮影方向を表わす方位と仰角の情報と、前記移動経路の方向の情報とが含まれることを特徴とする請求項1又は2に記載の測位装置。
<請求項4>
前記同一の被写体は、信号機であり、
前記撮影情報には、撮影画像上での前記信号機の所定部位の長さの情報と、撮影時の画角の情報とが含まれることを特徴とする請求項2に記載の測位装置。
<請求項5>
前記撮影画像上での前記信号機の所定部位の長さの情報は、信号機のカラーパネルの撮影画面上の長径としたことを特徴とする請求項4記載の測位装置。
<請求項6>
前記信号機の前記所定部位の長さが第1長さと定められている第1地域と第2長さと定められている第2地域とを判別する地域判別手段を備え、
前記距離算出手段は、
前記地域判別手段により判別された地域に応じて前記信号機の前記所定部位の長さの情報を前記第1長さと前記第2長さとに切り換えて前記複数の地点間の距離を算出することを特徴とする請求項4記載の測位装置。
<請求項7>
前記撮影手段により取得された画像を表示する表示手段を備え、
前記撮影手段により前記複数の地点で同一の被写体に対してそれぞれ撮影を行う場合に、2回目の以降の撮影時に、1回目の撮影画像を前記表示手段に表示することを特徴とする請求項2〜6の何れか一項に記載の測位装置。
<請求項8>
加速度を検出する加速度センサと、方位を計測する方位センサとを備え、前記加速度センサの検出に基づき計数される歩数と予め設定された歩幅データとから移動量を算出し、前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行うとともに、被写体の撮影を行う撮影手段を有する測位装置で、前記歩幅データを補正する歩幅データ補正方法であって、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出ステップと、
前記距離算出ステップにより算出された前記複数の地点間の距離に基づいて前記歩幅データを補正する歩幅補正ステップと、
を含んでいることを特徴とする歩幅データ補正方法。
<請求項9>
加速度を検出する加速度センサと、方位を計測する方位センサと、前記加速度センサの検出に基づき計数される歩数と予め設定された歩幅データとから移動量を算出し、前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行う測位手段と、被写体の撮影を行う撮影手段とを制御するコンピュータに、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出機能と、
前記距離算出機能により算出された前記複数の地点間の距離に基づいて前記歩幅データを補正する歩幅補正機能と、
を実現させるプログラム。
【符号の説明】
【0070】
1 デジタルカメラ
10 CPU(プログラムを実行するコンピュータ)
11 RAM
12 ROM
13 GPS受信アンテナ
14 GPS受信部
15 3軸地磁気センサ(方位センサ)
16 3軸加速度センサ(加速度センサ)
17 移動距離演算処理部
18 移動方向演算処理部
19 歩幅データ記憶部(歩幅データ記憶手段)
20 表示部
21 操作部
25 カメラ部
26 撮像部
27 オートフォーカス部
28 ズーム部
P 信号機のカラーパネル
M 撮像素子
Z1 ズームレンズ
Z2 フォーカスレンズ
【特許請求の範囲】
【請求項1】
被写体の撮影を行う撮影手段と、
加速度を検出する加速度センサと、
方位を計測する方位センサと、
予め設定された歩幅データを記憶する歩幅データ記憶手段と、
前記加速度センサの検出に基づき計数される歩数と前記歩幅データとから移動量を算出するとともに前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行う測位手段と、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出手段と、
前記距離算出手段により算出された前記複数の地点間の距離と前記複数の地点間の移動で計数された歩数とに基づいて前記歩幅データを補正する歩幅補正手段と、
を備えたことを特徴とする測位装置。
【請求項2】
前記距離算出手段は、
前記撮影手段により前記複数の地点で同一の被写体に対してそれぞれ行われた撮影の状況を表わす前記撮影情報から前記複数の地点間の距離を算出する
ことを特徴とする請求項1記載の測位装置。
【請求項3】
前記撮影情報には、
前記撮影手段のフォーカス調整位置に基づき算出される被写体までの距離の情報と、撮影方向を表わす方位と仰角の情報と、前記移動経路の方向の情報とが含まれることを特徴とする請求項1又は2に記載の測位装置。
【請求項4】
前記同一の被写体は、信号機であり、
前記撮影情報には、撮影画像上での前記信号機の所定部位の長さの情報と、撮影時の画角の情報とが含まれることを特徴とする請求項2に記載の測位装置。
【請求項5】
前記撮影画像上での前記信号機の所定部位の長さの情報は、信号機のカラーパネルの撮影画面上の長径としたことを特徴とする請求項4記載の測位装置。
【請求項6】
前記信号機の前記所定部位の長さが第1長さと定められている第1地域と第2長さと定められている第2地域とを判別する地域判別手段を備え、
前記距離算出手段は、
前記地域判別手段により判別された地域に応じて前記信号機の前記所定部位の長さの情報を前記第1長さと前記第2長さとに切り換えて前記複数の地点間の距離を算出することを特徴とする請求項4記載の測位装置。
【請求項7】
前記撮影手段により取得された画像を表示する表示手段を備え、
前記撮影手段により前記複数の地点で同一の被写体に対してそれぞれ撮影を行う場合に、2回目の以降の撮影時に、1回目の撮影画像を前記表示手段に表示することを特徴とする請求項2〜6の何れか一項に記載の測位装置。
【請求項8】
加速度を検出する加速度センサと、方位を計測する方位センサとを備え、前記加速度センサの検出に基づき計数される歩数と予め設定された歩幅データとから移動量を算出し、前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行うとともに、被写体の撮影を行う撮影手段を有する測位装置で、前記歩幅データを補正する歩幅データ補正方法であって、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出ステップと、
前記距離算出ステップにより算出された前記複数の地点間の距離に基づいて前記歩幅データを補正する歩幅補正ステップと、
を含んでいることを特徴とする歩幅データ補正方法。
【請求項9】
加速度を検出する加速度センサと、方位を計測する方位センサと、前記加速度センサの検出に基づき計数される歩数と予め設定された歩幅データとから移動量を算出し、前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行う測位手段と、被写体の撮影を行う撮影手段とを制御するコンピュータに、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出機能と、
前記距離算出機能により算出された前記複数の地点間の距離に基づいて前記歩幅データを補正する歩幅補正機能と、
を実現させるプログラム。
【請求項1】
被写体の撮影を行う撮影手段と、
加速度を検出する加速度センサと、
方位を計測する方位センサと、
予め設定された歩幅データを記憶する歩幅データ記憶手段と、
前記加速度センサの検出に基づき計数される歩数と前記歩幅データとから移動量を算出するとともに前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行う測位手段と、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出手段と、
前記距離算出手段により算出された前記複数の地点間の距離と前記複数の地点間の移動で計数された歩数とに基づいて前記歩幅データを補正する歩幅補正手段と、
を備えたことを特徴とする測位装置。
【請求項2】
前記距離算出手段は、
前記撮影手段により前記複数の地点で同一の被写体に対してそれぞれ行われた撮影の状況を表わす前記撮影情報から前記複数の地点間の距離を算出する
ことを特徴とする請求項1記載の測位装置。
【請求項3】
前記撮影情報には、
前記撮影手段のフォーカス調整位置に基づき算出される被写体までの距離の情報と、撮影方向を表わす方位と仰角の情報と、前記移動経路の方向の情報とが含まれることを特徴とする請求項1又は2に記載の測位装置。
【請求項4】
前記同一の被写体は、信号機であり、
前記撮影情報には、撮影画像上での前記信号機の所定部位の長さの情報と、撮影時の画角の情報とが含まれることを特徴とする請求項2に記載の測位装置。
【請求項5】
前記撮影画像上での前記信号機の所定部位の長さの情報は、信号機のカラーパネルの撮影画面上の長径としたことを特徴とする請求項4記載の測位装置。
【請求項6】
前記信号機の前記所定部位の長さが第1長さと定められている第1地域と第2長さと定められている第2地域とを判別する地域判別手段を備え、
前記距離算出手段は、
前記地域判別手段により判別された地域に応じて前記信号機の前記所定部位の長さの情報を前記第1長さと前記第2長さとに切り換えて前記複数の地点間の距離を算出することを特徴とする請求項4記載の測位装置。
【請求項7】
前記撮影手段により取得された画像を表示する表示手段を備え、
前記撮影手段により前記複数の地点で同一の被写体に対してそれぞれ撮影を行う場合に、2回目の以降の撮影時に、1回目の撮影画像を前記表示手段に表示することを特徴とする請求項2〜6の何れか一項に記載の測位装置。
【請求項8】
加速度を検出する加速度センサと、方位を計測する方位センサとを備え、前記加速度センサの検出に基づき計数される歩数と予め設定された歩幅データとから移動量を算出し、前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行うとともに、被写体の撮影を行う撮影手段を有する測位装置で、前記歩幅データを補正する歩幅データ補正方法であって、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出ステップと、
前記距離算出ステップにより算出された前記複数の地点間の距離に基づいて前記歩幅データを補正する歩幅補正ステップと、
を含んでいることを特徴とする歩幅データ補正方法。
【請求項9】
加速度を検出する加速度センサと、方位を計測する方位センサと、前記加速度センサの検出に基づき計数される歩数と予め設定された歩幅データとから移動量を算出し、前記方位センサの計測に基づき移動方向を算出して移動地点の測位を行う測位手段と、被写体の撮影を行う撮影手段とを制御するコンピュータに、
直線状の移動経路上の複数の地点でそれぞれ行われた前記撮影手段の撮影の状況を表わす撮影情報に基づいて前記複数の地点間の距離を算出する距離算出機能と、
前記距離算出機能により算出された前記複数の地点間の距離に基づいて前記歩幅データを補正する歩幅補正機能と、
を実現させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−189467(P2012−189467A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−53763(P2011−53763)
【出願日】平成23年3月11日(2011.3.11)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月11日(2011.3.11)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
[ Back to top ]