
測位装置、測位システム、測位方法、プログラム
【課題】周囲環境の影響によるセンサの信頼度低下に対して高い精度で測位が行えるようにする。
【解決手段】それぞれ検知対象が異なる複数のセンサから出力されるセンサ値の信頼度を環境データベースを利用して求める。また、信頼度が付加されたセンサ値を利用して複数の測位手法により並行して測位を行って複数の測位結果を得る。また、これらの測位結果の信頼度を環境データベースを利用して求める。そして、これらの信頼度が付加された測位結果を統合して1つの位置情報を出力するように構成する。
【解決手段】それぞれ検知対象が異なる複数のセンサから出力されるセンサ値の信頼度を環境データベースを利用して求める。また、信頼度が付加されたセンサ値を利用して複数の測位手法により並行して測位を行って複数の測位結果を得る。また、これらの測位結果の信頼度を環境データベースを利用して求める。そして、これらの信頼度が付加された測位結果を統合して1つの位置情報を出力するように構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば歩行者の位置を測位するのに好適な測位装置と、当該測位装置を備える測位システムに関する。また、これらの測位装置および測位システムにおける測位方法と、測位装置に実行させるためのプログラムに関する。
【背景技術】
【0002】
近年、歩行者の位置情報を利用した多様なサービスが提供されるようになってきている。このようなサービスでは、歩行者を測位してその位置情報を得るための技術が必須となる。
【0003】
歩行者を測位するための技術として次のようなものが知られている。すなわち、加速度センサ、ジャイロセンサおよび磁気方位センサのセンサ出力を用いて歩行動作の移動方位と歩幅を推定するとともに、この推定された移動方位と歩幅の信頼性を算定する。そして、推定された移動方位と歩幅に基づいて基準位置からの相対移動ベクトルを推定するとともに、移動方位と歩幅の信頼性に基づいて上記相対移動ベクトルの信頼性を算定するというデッドレコニング装置の技術である(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−309803号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
歩行者の測位に関しては、センサの誤差と、センサ出力を利用した測位の誤差が避けられない。具体的に、地磁気センサによっては方位を検知できるが、エスカレータの上やエレベータの中、また、列車内や駅のホームでは地磁気が大幅に乱れる。このために、例えば歩行者は静止しているのに係わらず、地磁気センサにより計測した値は大きな変化を示しているような状態となる。このときの地磁気センサの出力は非常に信頼性が低いことになる。また、この地磁気センサのセンサ値を利用する測位についても信頼性は低くなる。また、
【0006】
このようなセンサ値および測位結果の誤差は周囲環境の影響により発生するために回避することが困難であり、したがって、現状において歩行者の測位を常に高い精度で行うことは難しい。なお、このような問題は、多くの施設が存在する都市環境において特に顕著となる。
【0007】
特許文献1の技術では、デッドレコニングにおいて推定される移動方位と歩幅の信頼性および相対性移動ベクトルの信頼性を算定することとしている。しかし、ここでの信頼性の算定は、例えば誤差分散による演算のみによるものであるために、現実の周囲環境ごとに対応して的確に信頼度を求めることは難しい。
【0008】
そこで本発明は上記した課題を考慮して、センサの信頼度が低下する周囲環境下であっても高い精度で測位が行えるようにすることを目的とする。
【課題を解決するための手段】
【0009】
本発明は、上記課題に鑑みてなされたものであり、それぞれが異なる対象を計測してセンサ値を出力する複数のセンサと、前記複数のセンサから出力されるセンサ値ごとに他の所定のセンサ値を利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手段と、前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手段と、前記複数の測位処理手段から出力される測位結果ごとに他の所定の測位結果を利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手段とを備えることを特徴とする測位装置である。
【0010】
また、本発明は、測位装置と、当該測位装置とネットワーク経由で通信するデータベースサーバを備え、前記測位装置は、位置と当該位置にて発生するセンサ値の誤差が少なくとも対応付けられたセンサ値対応環境データベース、および、位置と当該位置にて発生する測位結果の誤差が少なくとも対応付けられた測位結果対応環境データベースを前記データベースサーバから受信する受信手段と、それぞれが異なる対象を計測してセンサ値を出力する複数のセンサと、前記複数のセンサから出力されるセンサ値ごとに、他の所定のセンサ値と前記センサ値対応環境データベースを利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手段と、前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手段と、前記複数の測位処理手段から出力される測位結果ごとに、他の所定の測位結果と前記測位結果対応環境データベースを利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手段と、前記測位結果信頼度評価手段から出力される信頼度付き測位結果を統合して統合測位結果を出力する測位結果統合手段とを備え、前記データベースサーバは、前記センサ値対応環境データベースと前記測位結果対応環境データベースとを記憶する環境データベース記憶手段と、前記前記センサ値対応環境データベースと前記測位結果対応環境データベースを、前記測位装置に送信する送信手段とを備えることを特徴とする測位システムである。
【0011】
また、本発明は、それぞれが異なる対象を計測してセンサ値を出力する複数のセンサから出力されるセンサ値ごとに他の所定のセンサ値を利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手順と、前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手順と、前記複数の測位処理手順から出力される測位結果ごとに他の所定の測位結果を利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手順とを備えることを特徴とする測位方法である。
【0012】
また、本発明は、測位装置と、当該測位装置とネットワーク経由で通信するデータベースサーバを備える測位システムにおける測位方法であって、前記測位装置において、位置と当該位置にて発生するセンサ値の誤差が少なくとも対応付けられたセンサ値対応環境データベース、および、位置と当該位置にて発生する測位結果の誤差が少なくとも対応付けられた測位結果対応環境データベースを前記データベースサーバから受信する受信手順と、それぞれが異なる対象を計測してセンサ値を出力する複数のセンサから出力されるセンサ値ごとに、他の所定のセンサ値と前記センサ値対応環境データベースを利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手順と、前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手順と、前記複数の測位処理手順から出力される測位結果ごとに、他の所定の測位結果と前記測位結果対応環境データベースを利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手順と、前記測位結果信頼度評価手順から出力される信頼度付き測位結果を統合して統合測位結果を出力する測位結果統合手順とを備え、前記データベースサーバにおいて、環境データベース記憶部に記憶される前記センサ値対応環境データベースと前記測位結果対応環境データベースを前記測位装置に送信する送信手順とを備えることを特徴とする測位方法である。
【発明の効果】
【0013】
本発明によれば、周囲環境の影響によるセンサの信頼度低下に係わらず高い精度で測位が行われるという効果が得られる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態におけるセンサ値信頼度評価の処理例を示す図である。
【図2】本発明の実施の形態におけるセンサ値対応環境データベース131を用いたセンサ値信頼度評価の処理例を示す図である。
【図3】本発明の実施の形態における測位結果信頼度評価の処理例を示す図である。
【図4】本発明の実施の形態における測位結果対応環境データベース132を用いた測位結果信頼度評価の処理例を示す図である。
【図5】本発明の実施の形態における測位結果統合の処理例を示す図である。
【図6】本発明の実施の形態におけるセンサ値対応環境データベース131および測位結果対応環境データベース132の構造例を示す図である。
【図7】本実施の形態における測位システム1の構成例を示す図である。
【図8】本実施の形態における携帯型ナビゲーション装置100の構成例を示す図である。
【図9】本実施の形態におけるデータベースサーバ300の構成例を示す図である。
【図10】本実施の形態における測位部120の構成例を示す図である。
【図11】センサ部110におけるセンサ構成の具体例を示す図である。
【図12】測位並行処理部122における測位手法の具体例を示す図である。
【図13】本実施の形態において携帯型ナビゲーション装置100内のセンサ値対応環境データベース131および測位結果対応環境データベース132を更新するための処理例を示す図である。
【図14】本実施の形態においてデータベースサーバ300のセンサ値対応環境データベース331および測位結果対応環境データベース332を更新するための処理例を示す図である。
【図15】センサ値対応環境データベース331および測位結果対応環境データベース332を構築するための処理例を示す図である。
【図16】補正地点を決定するための処理例を示す図である。
【発明を実施するための形態】
【0015】
[本実施の形態の基本概念]
以下に、本発明を実施するための形態(実施の形態)について説明する。本実施の形態では、歩行者の位置を測定する測位を行うにあたり複数のセンサを使用する。なお、これら複数のセンサは、歩行者が所持する携帯型の携帯型ナビゲーション装置において備えられる。
【0016】
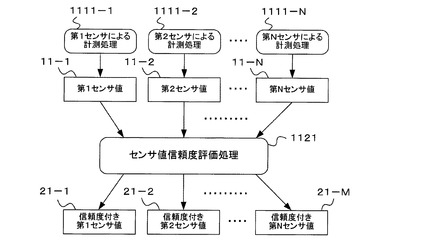
まず、本実施の形態における測位の基本概念について説明する。本実施の形態では、上記複数のセンサにより計測されたセンサ値ごとに信頼度を求め、信頼度としての値が付加されたセンサ値を生成して出力する。図1は、本実施の形態に対応するセンサ値の信頼度評価の基本的な処理態様例を示すものである(アクティビティ図)。ここでは、第1センサ〜第NセンサのN個のセンサが備えられているものとする。これら複数のセンサは、それぞれが異なる対象を計測する。
【0017】
図1においては、まず、第1〜第Nセンサによる計測処理1111−1〜1111−Nによって、それぞれが異なる対象を計測、検知する処理が並行して行われる。この第1〜第Nセンサによる計測処理1111−1〜1111−Nによって、第1センサ〜第Nセンサのそれぞれから第1センサ値11−1〜第Nセンサ値11−Nが出力される。
【0018】
センサ値信頼度評価処理1121は、上記第1センサ値11−1〜第Nセンサ値11−Nのそれぞれについて信頼度を評価する。このためにセンサ値信頼度評価処理1121は、信頼度を数値化して求める。そして、評価結果として、信頼度付き第1〜第Nセンサ値21−1〜21−Nを出力する。これら信頼度付きセンサ値21は、センサ値に対して信頼度を示す値が対応付けられた構造を有する。信頼度の数値表現については多様に考えることができるが、一例として、信頼度の値として100〜0の範囲を設定し、その数値が大きくなるほど信頼度が高いものとして扱うようにすることが考えられる。
【0019】
本実施の形態において、センサ値信頼度評価処理1121として、1つのセンサ値に対する信頼度は次のようにして求める。一例として第1センサ値11−1の信頼度を求めるにあたり、センサ値信頼度評価処理1121は、第1センサ値11−1以外の所定のセンサ値11を入力する。そして、センサ値信頼度評価処理1121は、第1センサ値11−1と、これに応じて選択した他のセンサ値11とを比較・解析する。一例として、センサ値信頼度評価処理1121は、第1センサ値11−1と他のセンサ値との変動パターンを比較する。この結果、歩行者の或る特定の状態に応じた値の変動パターンを示しているのに対して、第1センサ値11−1のみが異なるパターンを示していたとする。例えば、所定のアルゴリズムによってこのパターンの乖離の度合いを求めることにより、第1センサ値11−1の信頼度を求めることができる。そして、他のセンサ値11ごとについても、同様に、所定複数の他のセンサ値11を利用して信頼度を求めるようにする。
【0020】
このように、本実施の形態においては、1つのセンサ値の信頼度を求めるにあたり、他のセンサ値を利用する。これにより、例えば誤差分散のように確率統計演算のみを用いる場合と比較してより高い精度で信頼度を求めることができる。
【0021】
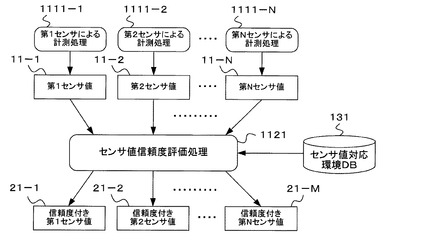
図2は、本実施の形態においてセンサ値信頼度評価を行うにあたり、周囲環境に関する情報を格納した環境データベースを用いた例を示している。この図において、図1と同一部分には同一符号を付して説明を省略する。この図におけるセンサ値信頼度評価処理1121は、1つのセンサ値11についての信頼度を求めるにあたり、センサ値対応環境データベース131のデータを利用する。
【0022】
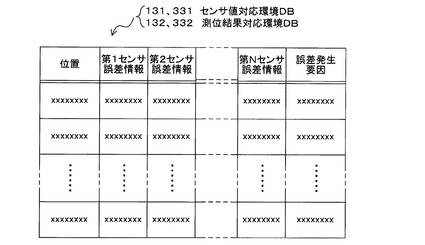
図6は、センサ値対応環境データベース131の構造例を示している。図示するように、センサ値対応環境データベース131は、位置のデータに対して、それぞれ誤差情報と誤差発生要因のデータを対応付けた構造を有する。位置は、例えば緯度、経度および標高の3次元により表すことができる。誤差情報は、対応する位置においてセンサごとに発生する誤差についての情報である。この誤差情報の具体例として、例えば、誤差の発生量であってもよいし、理想のセンサ値に対する誤差の比率として表されてもよい。誤差発生要因は、その位置において誤差情報が示す誤差を発生させる要因が何であるのかを示す情報である。一例として、センサ値対応環境データベース131が格納する或る位置が地下鉄のホームであるとする。地下鉄のホームでは地磁気が乱れるため、地磁気センサは、歩行者が静止していても、ランダムに変動するような変動を示す。この場合、地磁気センサに対応する誤差情報は、センサ値がランダムに変動することを示す。また、誤差発生要因として、地下鉄のホームであることにより地磁気の乱れが発生することを示す情報が格納される。
【0023】
図2におけるセンサ値信頼度評価処理1121は、他の複数のセンサ値を利用するとともに、上記構造のセンサ値対応環境データベース131を利用して、センサ値11の信頼度を求める。例えば、センサ値信頼度評価処理1121は、現在の位置情報に該当する位置をセンサ値対応環境データベース131から検索し、検索された位置に対応付けられた誤差および誤差発生要因を参照する。これにより、信頼度を求めるべきセンサ値の誤差と誤差発生要因を用いてして、より高い精度で信頼度を設定することができる。例えば、実際に地下鉄のホームに位置していて地磁気センサのセンサ値が大きく乱れているとしても、センサ値対応環境データベース131が無いとすれば、単に他のセンサ値との相違に基づいてしか信頼度を求められない。この場合、むやみに信頼度を低くすることはできない。これに対して、図2の構成では、センサ値対応環境データベース131の誤差情報が示すとおりの誤差であれば、誤差発生要因が地下鉄のホームにおける地磁気の乱れであると非常に高い確率で推定できる。したがって、この場合には信頼度を相当に低く設定することができる。
【0024】
本実施の形態においては、上記のように信頼度が付加された信頼度付きセンサ値21を利用して測位を行う。そして、測位に際しては、異なる複数の測位手法(測位アルゴリズム)を並行して行い、複数の測位結果を得る。さらに、これら複数の測位結果についても信頼度を求める。
【0025】
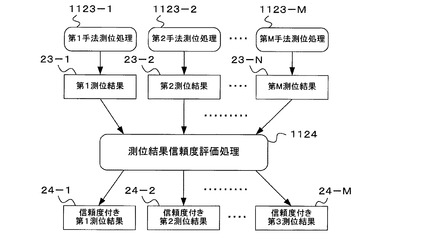
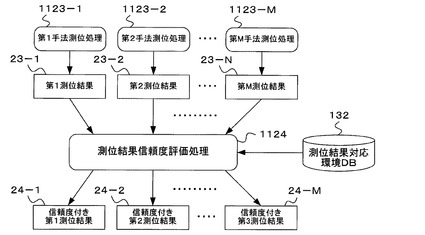
図3は、本実施の形態における測位結果信頼度評価として最も基本的な処理例を示している。本実施の形態においては、第1〜第M手法測位処理1123−1〜1123−Mによって、それぞれが異なる測位手法による測位処理が並行して実行される。これら第1〜第M手法測位処理1123−1〜1123−Mの測位の各々は、図1または図2に示したN個の信頼度付きセンサ値21−1〜21−Nのうちから所定の1以上のセンサ値21を入力して、所定の手法(アルゴリズム)による測位処理を実行する。これにより、図示するように、第1〜第M手法測位処理1123−1〜1123−Mごとに応じて、第1〜第M測位結果23−1〜23−Mが出力される。
【0026】
測位結果信頼度評価処理1124は、上記第1〜第M測位結果23−1〜23−Mごとの信頼度を求める。この測位結果信頼度評価処理1124によって1つの測位結果23の信頼度を求めるにあたっては、他の1以上の測位結果23を利用する。この測位結果信頼度評価処理1124により、第1〜第M測位結果23−1〜23−Mごとに信頼度が付加された、信頼度付き第1〜第M測位結果24−1〜24−Mが出力される。このように、測位結果23についても他の測位結果を利用することで高い精度で信頼度を求めることが可能になる。
【0027】
図4は、本実施の形態において測位結果信頼度評価を行うにあたり、環境データベースを用いた例を示している。この図において、図3と同一部分には同一符号を付して説明を省略する。この図における測位結果信頼度評価処理1124は、測位結果23についての信頼度を求めるにあたり、測位結果対応環境データベース132のデータを利用する。
【0028】
測位結果対応環境データベース132の構造としては、例えば先に説明した図6と同様のものを考えることができる。この場合の誤差情報はセンサ値についてのものではなく、測位結果としての値についてのものとなる。
【0029】
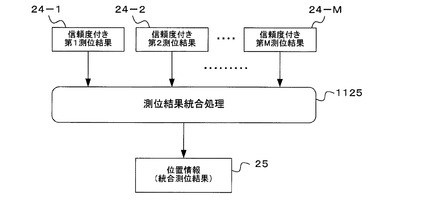
そして、本実施の形態においては、上記図3または図4のようにして得られた複数の信頼度付き第1〜第M測位結果24−1〜24−Mを利用して、最終的に1つの測位結果、すなわち位置情報を求める。図5は、この位置情報を求めるための処理例を示している。
【0030】
図5に示す測位結果統合処理1125は、信頼度付き第1〜第M測位結果24−1〜24−Mを入力する。そして、信頼度付き第1〜第M測位結果24−1〜24−Mの各々に付加された信頼度を利用し、例えば所定の確率統計アルゴリズムを用いることにより1つの統合された測位結果を算出する。このように算出された統合測位結果が位置情報25として出力される。この位置情報25は、例えば携帯型ナビゲーション装置などのアプリケーションによって利用される。
【0031】
[測位システムの構成例]
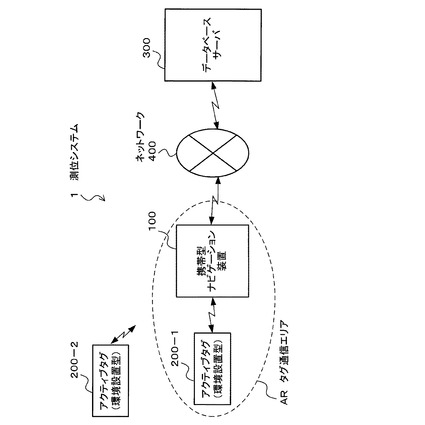
図7は、本実施の形態における測位システム1の構成例を示している。この図における測位システム1は、携帯型ナビゲーション装置100、アクティブタグ200およびデータベースサーバ300から成る。
【0032】
携帯型ナビゲーション装置100は、歩行者が携帯可能な形状サイズを有しており、これまでに説明した本実施の形態の歩行者測位の概念が適用された測位機能を有する。すなわち、携帯型ナビゲーション装置100によって、これを携帯している歩行者についての測位が行われる。この携帯型ナビゲーション装置100は、例えば専用の携帯型ナビゲーション装置であってもよい。また、歩行者ナビゲーション用のアプリケーションを実装した携帯電話、スマートフォンやタブレット型端末装置などを想定することもできる。
【0033】
アクティブタグ200は、例えば外部環境における要所ごとに設置される環境設置型のRFIDタグである。したがって、アクティブタグ200は、外部環境において多数が設置されることになるが、図においては、異なる場所に設置された2つのアクティブタグ200−1および200−2が示されている。これらのアクティブタグ200は、タグ通信エリアARとして示す数メートル程度の通信可能範囲に位置している携帯型ナビゲーション装置100と無線通信を行うことができる。図の例では、携帯型ナビゲーション装置100がアクティブタグ200−1のタグ通信エリアAR内に位置していることで、アクティブタグ200−1と通信可能な状態であることが示されている。アクティブタグ200の各々は、タグ情報として、例えば自己が設置された場所についての位置情報や、その場所における施設や環境に関する情報(例えば屋内、屋外、地下、エレベータであるなどの情報)を記憶している。携帯型ナビゲーション装置100は、アクティブタグ200と通信を行うことにより、上記タグ情報を取得することができる。
【0034】
データベースサーバ300は、後述するように環境データベースを記憶している。携帯型ナビゲーション装置100は、無線通信によりネットワーク400経由でデータベースサーバ300にアクセスし、環境データベースをダウンロードして記憶する。携帯型ナビゲーション装置100は、ダウンロードした環境データベースを利用して測位を実行する。
【0035】
[携帯型ナビゲーション装置の構成例]
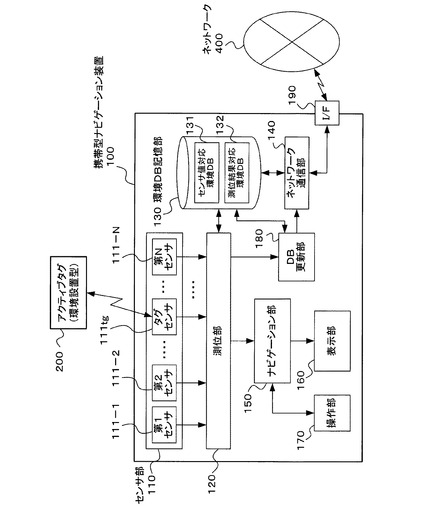
図8は、携帯型ナビゲーション装置100の構成例を示している。図示するように、携帯型ナビゲーション装置100は、センサ部110、測位部120、環境データベース記憶部130、ネットワーク通信部140、ナビゲーション部150、表示部160、操作部170、データベース更新部180、およびネットワークインターフェース190を備える。
【0036】
センサ部110は、第1〜第Nセンサ111−1〜111−NのN個のセンサからなる部位である。これら第1〜第Nセンサ111−1〜111−Nの各々は、それぞれが異なる対象を計測、検知するセンサであり、同時並行で計測、検知動作を行う。また、これらの第1〜第Nセンサ111−1〜111−Nのうちの1つには、図示するように、アクティブタグ200と通信を行うタグセンサ111tgが備えられる
【0037】
測位部120は、上記第1〜第Nセンサ111−1〜111−Nから出力されるN個のセンサ値を入力して位置情報(統合測位結果)を出力する部位である。すなわち、測位部120は、図1乃至図5により説明したセンサ値信頼度評価処理1121、測位結果信頼度評価処理1124および測位結果統合処理1125の処理を行うように構成されている。
【0038】
環境データベース記憶部130は、センサ値対応環境データベース131および測位結果対応環境データベース132を保持する。これらセンサ値対応環境データベース131および測位結果対応環境データベース132は、ネットワーク400を介した無線通信によりデータベースサーバ300からダウンロードして取得する。後述するように、センサ値対応環境データベース131は、測位部120がセンサ値信頼度評価を行う際に利用される。測位結果対応環境データベース132は、測位部120が測位結果信頼度評価を行う際に利用される。なお、環境データベース記憶部130が対応するハードウェアとしては、例えばフラッシュメモリ、HDD(ハードディスクドライブ)などを挙げることができる。
【0039】
ネットワーク通信部140は、ネットワーク400経由での通信を行うための通信モジュールである。ネットワークインターフェース190はネットワーク通信部140の制御に応じてネットワーク400との間でデータの送受信を実行する部位である。これらネットワーク通信部140およびネットワークインターフェース190の動作によって、データベースサーバ300から、センサ値対応環境データベース131および測位結果対応環境データベース132のデータをダウンロードすることができる。
【0040】
ナビゲーション部150は、測位部120から出力される位置情報を利用してナビゲーションに関する各種の動作を実行するモジュールである。このナビゲーション部150は、例えばナビゲーション機能のためのアプリケーションプログラムによって実現される。ナビゲーション部150により実現される行われるナビゲーションサービスの具体例については多様に考えられることから、ここでの説明は省略する。
【0041】
表示部160は、ナビゲーション部150の制御に応じてユーザインターフェース画像が表示される。例えば地図上における歩行者の位置をはじめ、各種のサービスに関する情報が所定の態様によって表示される。操作部170は、携帯型ナビゲーション装置100に対してユーザ(歩行者)が操作を行うための操作子を一括して示している。この操作部170としては、例えば携帯型ナビゲーション装置100に備えられるボタン、キーなどのほか、表示部160にタッチパネルが配置されているのであれば、このタッチパネルなども含まれる。
【0042】
データベース更新部180は、測位部120におけるセンサ値および測位結果についての信頼度評価結果に基づいて、センサ値対応環境データベース131および測位結果対応環境データベース132を更新するための処理を実行する。また、データベース更新部180は、測位部120にて得られたセンサ値および測位結果についての信頼度評価結果をネットワーク400経由でデータベースサーバ300に送信することで、環境データベースの更新要求も実行可能とされている。データベースサーバ300は、上記の更新要求に応じて、受信した評価結果を利用して自己が記憶している環境データベースの内容を更新することができる。
【0043】
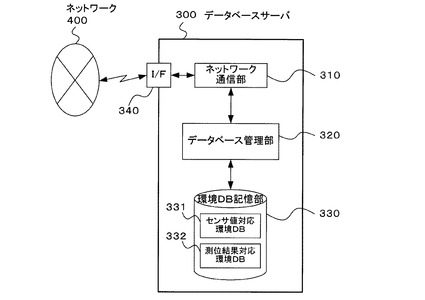
[データベースサーバの構成例]
図9は、データベースサーバ300の構成例を示している。この図に示すデータベースサーバ300は、ネットワーク通信部310、データベース管理部320、環境データベース記憶部330およびネットワークインターフェース340を備える。
【0044】
ネットワーク通信部310は、ネットワークインターフェース340を介してネットワーク400経由で通信を行うためのモジュールである。
【0045】
環境データベース記憶部330は、環境データベースとして、センサ値対応環境データベース331および測位結果対応環境データベース332の2つを記憶する部位であり、ハードウェアとしては例えばHDDなどが用いられる。
【0046】
データベース管理部320は、環境データベース記憶部330に記憶されるセンサ値対応環境データベース331および測位結果対応環境データベース332のデータを管理する部位である。具体例として、携帯型ナビゲーション装置100からのダウンロード要求に応じたセンサ値対応環境データベース331および測位結果対応環境データベース332のアップロードを実行する。
【0047】
データベース管理部320によりアップロードされたセンサ値対応環境データベース331は、携帯型ナビゲーション装置100の環境データベース記憶部130においてセンサ値対応環境データベース131として記憶される。また、アップロードされた測位結果対応環境データベース332は、携帯型ナビゲーション装置100の環境データベース記憶部130において測位結果対応環境データベース132として記憶される。また、データベース管理部320は、携帯型ナビゲーション装置100からの更新要求に応じて、センサ値対応環境データベース331および測位結果対応環境データベース332の更新処理を実行する。
【0048】
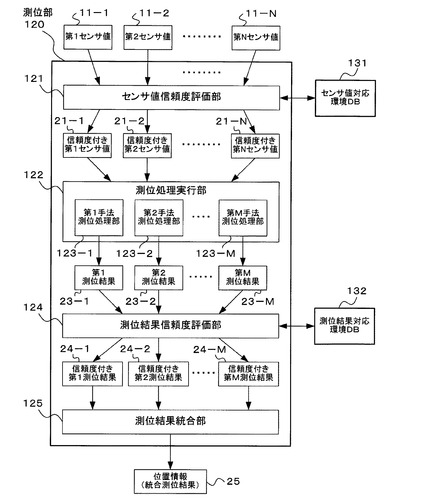
[携帯型ナビゲーション装置の構成例]
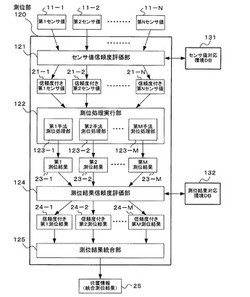
図10は、測位部120の構成例を示している。なお、この図においては、説明の便宜上、測位部120を構成する部位とともに、各部位において入出力されるデータも示している。この図に示す測位部120は、センサ値信頼度評価部121、測位並行処理部122、測位結果信頼度評価部124および測位結果統合部125を備える。
【0049】
第1〜第Nセンサ111−1〜111−N(図10においては図示を省略)からは、それぞれ、第1〜第Nセンサ値11−1〜11−Nが出力される。センサ値信頼度評価部121は、上記第1〜第Nセンサ値11−1〜11−Nを入力するとともに、センサ値対応環境データベース131を参照することにより、図1および図2に示したセンサ値信頼度評価処理1121を実行し、信頼度付き第1〜第Nセンサ値21−1〜21−Nを出力する。これまでの説明から理解されるように、信頼度付き第1〜第Nセンサ値21−1〜21−Nは、それぞれ、信頼度の値が対応付けられた第1〜第Nセンサ値11−1〜11−Nである。
【0050】
測位並行処理部122は、第1〜第M手法測位処理部123−1〜123−Mを備える。第1〜第M手法測位処理部123−1〜123−Mは、それぞれが異なる測位手法(アルゴリズム)による測位を同時並行して実行する。また、第1〜第M手法測位処理部123−1〜123−Mは、その測位手法に応じて、信頼度付き第1〜第Nセンサ値21−1〜21−Nのうちから所定の1以上の信頼度付きセンサ値21を選択的に入力して測位処理を実行する。第1〜第M手法測位処理部123−1〜123−Mは、各々の測位処理を実行することにより、それぞれ、第1〜第M測位結果23−1〜23−Mを出力する。
【0051】
測位結果信頼度評価部124は、上記第1〜第M測位結果23−1〜23−Mを入力するとともに、測位結果対応環境データベース132を参照することにより、図3および図4により説明した測位結果信頼度評価処理1124を実行する。そして、測位結果信頼度評価部124は、信頼度評価処理の結果として、信頼度付き第1〜第M測位結果24−1〜24−Mを出力する。これら信頼度付き第1〜第M測位結果24−1〜24−Mは、それぞれ、信頼度の値が対応付けられた第1〜第M測位結果23−1〜23−Mである。
【0052】
測位結果統合部125は、上記信頼度付き第1〜第M測位結果24−1〜24−Mを入力して測位結果統合処理1125(図5)を実行し、統合結果として求められた位置情報(統合測位結果)25を出力する。この位置情報25は、ナビゲーション部150によって利用される。
【0053】
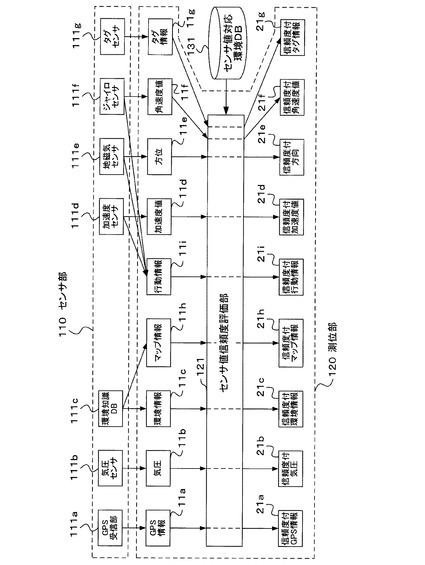
[携帯型ナビゲーション装置の具体的構成例]
図11および図12を参照して、携帯型ナビゲーション装置100におけるセンサ111と測位並行処理部122における測位手法の一具体例について説明する。図11において、センサ部110は、センサ111として、GPS受信部111a、気圧センサ111b、環境知識データベース111c、加速度センサ111d、地磁気センサ111e、ジャイロセンサ111f、タグセンサ111gを備えるものとしている。これらのセンサ(111a〜111g)は、図8との対応では、センサ111−1〜111−Nに対応宇する。
【0054】
GPS受信部111aは、GPS衛星からの電波を受信して、衛星からの距離などの位置算出に利用すべき所定の情報(GPS情報11a)を取得する部位である。気圧センサ111bは、気圧11bの値を計測して出力する。環境知識データベース111cは、携帯型ナビゲーション装置100において記憶されている地図情報であり、この地図情報において示される施設などの環境についての情報を環境情報11cとして出力する。この環境知識データベース111cは、本実施の形態の場合には、ナビゲーション部150が利用するデータを利用することができる。
【0055】
加速度センサ111dは、動きに応じた加速度値11dを計測して出力する。地磁気センサ111eは、地磁気を検出することにより方位11eを計測して出力する。ジャイロセンサ111fは、動きに応じた角速度値11fを計測して出力する。タグセンサ111gは、図8のタグセンサ111tgと同じものであり、通信可能なアクティブタグ200からタグ情報11gを受信取得し、これを出力する。
【0056】
また、環境知識データベース111cの地図情報をもとにして、センサ値としてマップ情報11hも派生的に生成される。マップ情報11hは、地図としての図形データに相当する。また、加速度センサ111d、地磁気センサ111eおよびジャイロセンサ111fの各センサ出力を利用して行動情報11iも生成される。行動情報は、例えば歩行者の行動として、停止、歩行、走行などを区別して示すものである。
【0057】
センサ値信頼度評価部121は、評価対象のセンサ値として、上記GPS情報11a、気圧11b、環境情報11c、加速度値11d、方位11e、角速度値11f、タグ情報11g、マップ情報11hおよび行動情報11iを入力する。そして、センサ値信頼度評価部121は、センサ値対応環境データベース131を参照して各センサ値の信頼度を求め、次の信頼度付きセンサ値を出力する。つまり、信頼度付きGPS情報21a、信頼度付き気圧21b、信頼度付き環境情報21c、信頼度付き加速度値21d、信頼度付き方位21e、信頼度付き角速度値21f、信頼度付きタグ情報21g、信頼度付きマップ情報21hおよび信頼度付き行動情報21iを出力する。
【0058】
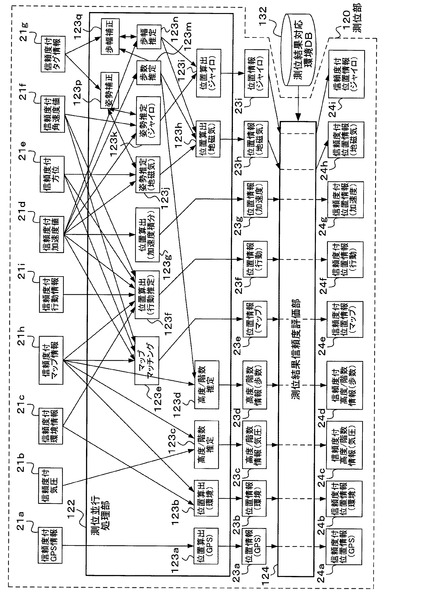
次に、図12を参照して、測位並行処理部122における測位手法の具体例について説明する。上記図11のセンサ値信頼度評価部121から出力された信頼度付きセンサ値(11a〜11iは、次に述べるようにして測位並行処理部122における所定の手法による測位処理部(123a〜123q)が適宜利用する。図10の第1手法測位処理部123−1〜123−Mは、測位処理部(123a〜123q)単体または複数の組み合わせによって形成されるものとなる。
【0059】
まず、測位並行処理部122における測位処理部(123)として、位置算出部123aは、GPS情報11aを入力して現在位置を算出し、この算出結果(測位結果)を位置情報23aとして出力する。この位置情報23aは、例えば緯度、経度および高度により表現される。
【0060】
位置算出部123bは、信頼度付き環境情報21cおよび信頼度付きマップ情報21hを利用して、環境情報およびマップ情報に基づいて現在位置を算出し、位置情報23bとして出力する。
【0061】
高度/階数推定部123cは、信頼度付き気圧21bおよび信頼度付きマップ情報21hを利用して、高度または階数を推定し、この推定結果(測位結果)を高度/階数情報23cとして出力する。この高度/階数推定部123cは、基本的には、信頼度付き気圧21bに基づいて高度を算出するが、信頼度付きマップ情報21hに基づいて現在の位置情報が階段のある場所を示しているような場合には、高度に基づいて階数も推定する。
【0062】
また、高度/階数推定部123dは、後述の歩数推定部123mにより推定された歩数と信頼度付き信頼度付きマップ情報21hを利用して高度または階数を推定し、推定結果(測位結果)として高度/階数情報23dを出力する。例えば、高度/階数推定部123dは、信頼度付き信頼度付きマップ情報21hに基づいて現在の位置情報が示す場所が平地であるのか、あるいは傾斜地や階段などであるのかを判定する。そして、傾斜地や階段であると判定した場合には、歩数に基づいて高度または階数を推定する。
【0063】
マップマッチング処理部123eは、信頼度付きマップ情報21h、信頼度付き加速度値21d、信頼度付き方位21eおよび信頼度付き角速度値21fを入力して、マップマッチング処理を実行する。すなわち、信頼度付き加速度値21d、信頼度付き方位21eおよび信頼度付き角速度値21fにより算出される位置を、信頼度付きマップ情報21hが示すマップ上にマッチングさせることにより位置を推定する。このように推定した位置を、位置情報23eとして出力する。
【0064】
位置算出部123fは、信頼度付き環境情報21c、信頼度付きマップ情報21h、信頼度付き行動情報21i、信頼度付き加速度値21d、信頼度付き方位21eおよび信頼度付き角速度値21fを利用して位置を算出し、位置情報23fを出力する。信頼度付き行動情報21iに基づいて推定された歩行者の行動は、信頼度付き環境情報21cおよび信頼度付きマップ情報21hが示す周囲環境の情報と照らし合わせることにより、より詳細に推定される。例えば、信頼度付き環境情報21cおよび信頼度付きマップ情報21hにより、歩行中の場所は階段であるという情報が得られる。そのうえで、信頼度付き加速度値21d、信頼度付き方位21eおよび信頼度付き角速度値21fを利用することで歩行者が階段を上り下りしている状態を推定して、高度を含む現在の位置を推定することができる。
【0065】
位置算出部123gは、信頼度付き加速度値21dを利用して求められる移動距離に基づいて位置を算出し、位置情報23gとして出力する。
【0066】
位置算出部123hは、後述する姿勢推定部123jにより推定された姿勢の情報と、歩数推定部123mにより推定された歩数の情報と、歩幅推定部123nにより推定された歩幅の情報とを利用して位置を算出し、位置情報23hとして出力する。
【0067】
位置算出部123iは、姿勢推定部123kにより推定された姿勢の情報と、歩幅推定部123nにより推定された歩幅の情報とを利用して位置を算出し、位置情報23iとして出力する。
【0068】
姿勢推定部123jは、信頼度付き加速度値21d、信頼度付き方位21e、姿勢補正部123pから出力される姿勢補正データとを利用して姿勢を推定する。すなわち、信頼度付き加速度値21dおよび信頼度付き方位21eを利用して、姿勢として、例えばどの方位に向かってどの程度の速度で移動しているのか推定する。姿勢補正データは、上記のように信頼度付き加速度値21dおよび信頼度付き方位21eを利用した推定された姿勢の誤差を補正するために利用する。このようにして推定された姿勢の情報は前述のように位置算出部123hが利用する。
【0069】
姿勢推定部123kは、信頼度付き加速度値21d、信頼度付き角速度値21fおよび姿勢補正部123pからの姿勢補正データを利用して姿勢を推定する。信頼度付き加速度値21dおよび信頼度付き角速度値21fにより、歩行者の姿勢として例えば移動方向が求められる。また、このようにして求められた姿勢の誤差を姿勢補正データにより補正する。この姿勢推定部123kにより推定された姿勢の情報は、前述のように、位置算出部123iが利用する。
【0070】
姿勢補正部123pは、信頼度付きタグ情報21gを利用して姿勢補正データを生成する。信頼度付きタグ情報21gは、アクティブタグ200の設置位置に応じた正確な位置を有している。姿勢推定部123jおよび123kにて推定された姿勢に基づいて求められる位置と、信頼度付きタグ情報21gが示す位置とを比較することで、例えば推定された姿勢として示される移動方向などの誤差が求められる。そこで、姿勢補正部123pは、この誤差を補正するための補正量を姿勢補正データとして出力する。
【0071】
歩数推定部123mは、信頼度付き加速度値21dの時間軸における変動パターンに基づいて歩数を推定する。推定された歩数の情報は、前述のように、高度/階数推定部123dおよび位置算出部123hが利用する。
【0072】
歩幅推定部123nは、信頼度付き加速度値21dの変動周期に基づいて歩幅を推定する。また、このように推定された歩幅の誤差を、歩幅補正部123qにより得られた歩幅推定データを利用して補正する。
【0073】
歩幅補正部123qは、歩数推定部123mにより推定された歩数の情報と信頼度付きタグ情報21gに基づいて歩幅補正データを生成する。例えば歩行者が移動するのに応じて、異なる場所に配置されたアクティブタグ200のそれぞれから信頼度付きタグ情報21gが得られる。これらの信頼度付きタグ情報21gが示す位置情報から移動距離が求められるが、この移動距離と歩数の情報とを利用すれば信頼性の高い歩幅が求められる。歩幅補正部123qは、このように求めた歩幅の情報を歩幅補正データとして出力する。
【0074】
これまでの説明のようにして、図12に示す測位並行処理部122においては、異なるアルゴリズムによる測位処理が並行して行われる。そして、これらの測位処理の結果、測位結果23として、位置情報23a、23b、23e、23f、23g、23h、23i、および、高度/階数情報23c、23dを出力する。
【0075】
そして、測位結果信頼度評価部124は、測位結果対応環境データベース132を利用して、上記の測位結果ごとについての信頼度を求める処理を行い、信頼度付き測位結果24を出力する。すなわち、図示するように、信頼度付き位置情報24a、24b、24e、24f、24g、24h、24i、および、信頼度付き高度/階数情報24c、24dを出力する。そして、測位結果統合部125は、信頼度付き測位結果24を入力して統合処理に利用する。これにより、最終的に1つの位置情報25が出力される。
【0076】
なお、測位結果信頼度評価部124およびセンサ値信頼度評価部121において信頼度を算出するアルゴリズムの具体例としては、例えば決定木、ニューラルネットワーク、強化学習アルゴリズム、ベイズ推定などの確率的推定手法など挙げることができる。
【0077】
また、測位結果統合部125が測位結果24を統合するためのアルゴリズムとしても、確率統計に基づく演算手法を用いることができる。また、パーティクルフィルタ、カルマンフィルタ、ベイジアンネットワークなどを適用することもできる。
【0078】
[環境データベースを更新するための構成]
センサ値11および測位結果23の信頼度評価に用いられるセンサ値対応環境データベース131および測位結果対応環境データベース132は、図6に示したように、位置ごとに対してセンサ値の誤差および誤差発生要因の情報を対応付けたレコードの集合として形成される。このために、例えば施設の増設あるいは撤去などにより周囲環境が変化した場合には、環境データベース(センサ値対応環境データベース131および測位結果対応環境データベース132)の内容の一部に誤りが生じることになる。このことからすれば、周囲環境の変化に対応して、環境データベースの内容の追加や変更が行われるようにすることが好ましい。
【0079】
本実施の形態では、携帯型ナビゲーション装置100が備えるデータベース更新部180(図8)を備えることで、環境データベースの内容を更新可能とされている。以下に、この点について説明する。
【0080】
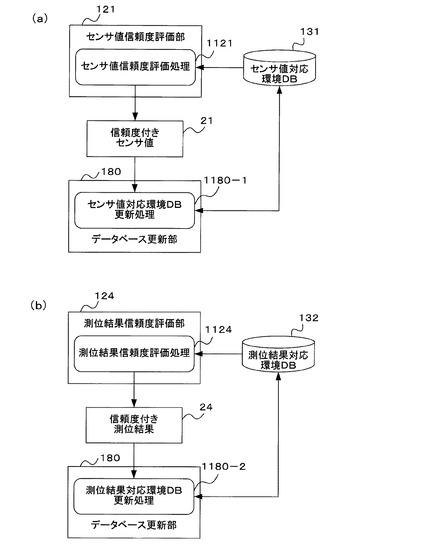
図13(a)は、センサ値対応環境データベース131の更新処理例を模式的に示している。まず、センサ値信頼度評価部121は、これまでの説明のように、センサ値信頼度評価処理1121を実行して信頼度付きセンサ値21を出力する。データベース更新部180は、この信頼度付きセンサ値21を入力して、センサ値対応環境データベース更新処理1180−1を実行する。
【0081】
データベース更新部180は、センサ値対応環境データベース更新処理1180−1として、例えば次のように処理を実行する。データベース更新部180は、センサ値対応環境データベース131から、最新の位置情報25と同じ場所を示す位置を検索する。ここで、位置が検索されなかった場合には、最新の位置情報25に対して、入力した信頼度付きセンサ値21から求めたセンサ値の誤差を対応付けてレコードを形成し、センサ値対応環境データベース131に対して新規登録を行う。
【0082】
また、センサ値対応環境データベース131から位置情報25に対応する場所の位置が検索された場合には、この位置に対応付けられている誤差情報と、入力した信頼度付きセンサ値21から求められる誤差とを比較する。ここで両者が同等とみてよい値であれば更新は行わない.これに対して、両者の値が一定以上に乖離しており同等と見ることができない場合には、環境の変化によりセンサ値に誤差を発生させる要因が変化していることが推定される。そこで、この場合には、入力した信頼度付きセンサ値21により求められた誤差の値が反映されるように誤差情報を書き換える。
【0083】
図13(b)は、測位結果対応環境データベース132の更新処理例を模式的に示している。まず、測位結果信頼度評価部124は、測位結果信頼度評価処理1124を実行して信頼度付き測位結果24を出力する。データベース更新部180は、この信頼度付き測位結果24を入力して、測位結果対応環境データベース更新処理1180−2を実行する。
【0084】
データベース更新部180は、測位結果対応環境データベース更新処理1180−2として、上記センサ値対応環境データベース更新処理1180−1に準じた処理により、測位結果対応環境データベース132に対する新規登録または書き換えを行う。
【0085】
このように本実施の形態では、携帯型ナビゲーション装置100が記憶するセンサ値対応環境データベース131および測位結果対応環境データベース132の内容を、センサ値の信頼度および測位結果の信頼度に基づいて更新することができる。
【0086】
上記の構成は、携帯型ナビゲーション装置100の内部にて記憶している環境データベースを更新するものであるが、環境データベースは、データベースサーバ300にも記憶されている。このデータベースサーバ300に記憶される環境データベースも更新できるようにすれば、多数のナビゲーション装置100がダウンロードする環境データベースの内容が外部環境に応じて常にアップデートされることとなって好ましい。そこで、図14により、携帯型ナビゲーション装置100からデータベースサーバ300が記憶する環境データベースを更新するための構成について説明する。
【0087】
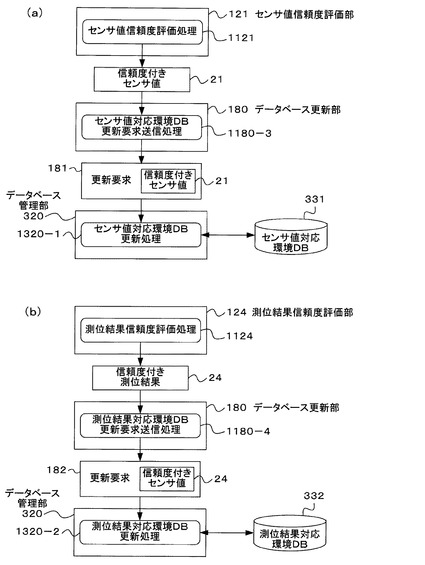
図14(a)は、センサ値対応環境データベース331の更新処理例を示している。携帯型ナビゲーション装置100においてデータベース更新部180は、センサ値信頼度評価部121のセンサ値信頼度評価処理1121によって得られる信頼度付きセンサ値21を入力する。そして、データベース更新部180は、データベースサーバ300に対してネットワーク400経由でセンサ値対応環境データベース331の更新を要求する更新要求送信処理1180−3を実行する。この更新要求送信処理1180−3処理として、データベース更新部180は、更新要求181とともに信頼度付きセンサ値21をデータベースサーバ300に対して送信する。
【0088】
データベースサーバ300において受信された上記更新要求181は、データベース管理部320に入力される。データベース管理部320は、入力された更新要求181に応じてセンサ値対応環境データベース更新処理1320−1の処理を実行する。このセンサ値対応環境データベース更新処理1320−1としては、更新要求181とともに送信された信頼度付きセンサ値21を利用して、先に図13(a)により説明したセンサ値対応環境データベース更新処理1180−1と同様の処理を実行すればよい。
【0089】
図14(b)は、測位結果対応環境データベース332の更新処理例を示している。携帯型ナビゲーション装置100においてデータベース更新部180は、測位結果信頼度評価部124が実行する測位結果信頼度評価処理1124によって得られる信頼度付き測位結果24を入力する。次に、データベース更新部180は、データベースサーバ300に対してネットワーク400経由で測位結果対応環境データベース332の更新を要求する更新要求送信処理1180−4を実行する。この処理として、データベース更新部180は、更新要求182とともに信頼度付き測位結果24をデータベースサーバ300に対して送信する。
【0090】
データベース管理部320は、受信された更新要求181に応じて測位結果対応環境データベース更新処理1320−2の処理を実行する。この測位結果対応環境データベース更新処理1320−2は、先に図13(b)により説明した測位結果対応環境データベース更新処理1180−2に準じたものとなる。
【0091】
このように本実施の形態では、携帯型ナビゲーション装置100において求められたセンサ値の信頼度および測位結果の信頼度に基づいて、データベースサーバ300が記憶するセンサ値対応環境データベース331および測位結果対応環境データベース332の内容を更新することができる。
【0092】
[環境データベースの作成手順例]
データベースサーバ300に記憶させる環境データベース(センサ値対応環境データベース331および測位結果対応環境データベース332)は、事前に、本実施の形態の携帯型ナビゲーション装置100に対応するナビゲーションサービスを提供する事業者が構築して用意する。そこで、図15により、環境データベースを構築する手順例について説明する。
【0093】
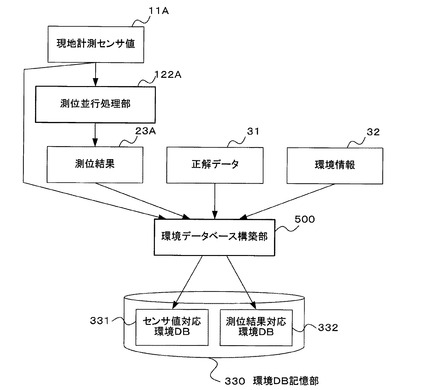
このためには、まず、現地において予め決めておいた計測経路について、実際にセンサ部110を構成するセンサ111による計測を行い、そのセンサ値を収集する。このように収集されたセンサ値は、図15において、現地計測センサ値11Aとして示されている。
【0094】
次に、測位並行処理部122Aにより、例えば収集した現地の現地計測センサ値11Aを利用して測位を実行させる。測位並行処理部122Aは、例えば図10に示した携帯型ナビゲーション装置100における測位並行処理部122と同様の測位機能を有する。すなわち、複数の異なる測位手法による測位処理を並行して実行することにより、複数の測位結果を出力する。この場合には、現地における計測位置ごとに対応して複数の測位手法に応じた複数の測位結果が得られる。図15では、計測位置ごとに対応する複数の測位結果の集合を、測位結果23Aとして一括して示している。
【0095】
また、環境データベースを構築するにあたり、上記現地計測センサ値11Aおよび測位結果23Aのほかに、正解データ31および環境情報32を利用する。正解データ31は、現地計測センサ値11Aの収集に際して実際に通過した経路に対応する位置と、その位置を通過した際の時間などからなる情報である。つまり、正しい測位結果として扱われる情報(測位結果対応正解データ)を有する。また、現地計測センサ値11Aの収集に際して実際に通過した経路において、外部環境の影響を排除した場合に計測されるものとしてシミュレートしたセンサ値の情報(センサ値対応正解データ)を有する。環境情報32は、特定のセンサの計測に誤差を生じる位置やその誤差発生要因の情報や、特定の測位手法による測位結果に誤差を生じる位置やその誤差発生要因の情報などとなる。
【0096】
環境データベース構築部500は、正解データ31(センサ値対応正解データ)と、環境情報32を利用してセンサ値対応環境データベース331を構築する。例えば、環境データベース構築部500は、現地計測センサ値11Aと正解データ31(センサ値対応正解データ)とを照合することにより、現地計測センサ値11Aの誤差を算出できる。また、環境情報32から誤差の生じた位置の誤差発生要因を特定できる。これにより、位置に対してセンサ値の誤差情報と誤差発生要因の情報を対応付けて、センサ値対応環境データベース331を構築することができる。
【0097】
また、環境データベース構築部500は、測位結果23Aと、正解データ31(測位結果対応正解データ)と、環境情報32を利用して測位結果対応環境データベース332を構築する。環境データベース構築部500は、測位結果23Aと正解データ31(測位結果対応正解データ)とを照合することにより測位結果23Aの誤差を算出し、環境情報32から誤差発生要因を特定する。そして、位置に対して測位結果の誤差情報と誤差発生要因の情報を対応付けて、測位結果対応環境データベース332を構築する。
【0098】
そして、環境データベース構築部500は、このように構築されたセンサ値対応環境データベース331および測位結果対応環境データベース332を、データベースサーバ300の環境データベース記憶部330に書き込んで記憶させる。
【0099】
[補正地点決定例]
これまでの説明から理解されるように、本実施の形態の携帯型ナビゲーション装置100は、測位手法として自律航法型も採用している。現状の自律航法型による測位では時間経過に応じた誤差の累積を避けることが難しい。そこで、本実施の形態の測位システム1では、アクティブタグ200を周囲環境に設置し、このアクティブタグ200の情報によって測位結果を補正するようにしている。
【0100】
アクティブタグ200を設置する位置を多くすれば、それだけ測位結果が補正される場所が増えるために位置情報の精度も高くなる。しかし、アクティブタグ200を設置する場所が多くなるほどコストアップになってしまう。これを回避するには、センサ値や計測結果の信頼性の高い地点は避けて、信頼性の低い地点に対してアクティブタグ200を重点的に設置すればよい。このためには、センサ値や計測結果の信頼性の低い地点を効率的に特定する必要がある。
【0101】
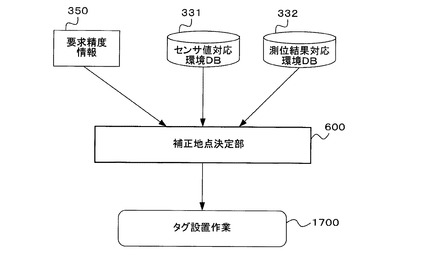
そこで、図16を参照して、本実施の形態における補正地点特定のための手順例について説明する。補正地点の特定は、補正地点決定部600が実行する。この補正地点決定部600は、図示するように、要求精度情報350と、センサ値対応環境データベース331および測位結果対応環境データベース332を用いる。要求精度情報350は、センサ値および測位結果として要求される精度を示す情報である。
【0102】
補正地点決定部600は、要求精度情報350とセンサ値対応環境データベース331のデータを利用して、位置ごとのセンサ値の精度分布を判定する。また、要求精度情報350と測位結果対応環境データベース332のデータを利用して、位置ごとの測位結果の精度分布を判定する。そして、これらの精度分布の情報から、センサ値と測位結果の信頼性が一定以下の地点を特定するための解析処理を実行する。このように特定された地点が補正地点となる。そして、事業者は、特定された補正地点に対してアクティブタグ200を設置する、タグ設置作業1700を行う。これにより、アクティブタグ200は、センサ値や測定結果の信頼性が低くなる環境に対して重点的に設置されることになる。つまり、必要最小限のアクティブタグ200を有効に設置して十分な位置推定精度を得ることができる。
【0103】
なお、本実施の形態においてこれまでに説明した処理手順は、これら一連の手順を有する方法として捉えることができる。また、これら一連の手順をコンピュータに実行させるためのプログラムまたはそのプログラムを記憶する記録媒体として捉えることができる。この記録媒体としては、例えば、ブルーレイディスク(Blu−ray Disc(登録商標))、DVD(Digital Versatile Disk)、HDD(ハードディスク)、メモリカード等を挙げることができる。
【符号の説明】
【0104】
1 測位システム
100 携帯型ナビゲーション装置
110 センサ部
111−1〜111−N センサ
120 測位部
121 センサ値信頼度評価部
122 測位並行処理部
123−1〜123−M 第1〜第M手法測位処理部
124 測位結果信頼度評価部
125 測位結果統合部
130 環境データベース記憶部
131 センサ値対応環境データベース
132 測位結果対応環境データベース
140 ネットワーク通信部
150 ナビゲーション部
160 表示部
170 操作部
180 データベース更新部
190 ネットワークインターフェース
200 アクティブタグ
300 データベースサーバ
310 ネットワーク通信部
320 データベース管理部
330 環境データベース記憶部
331 センサ値対応環境データベース
332 測位結果対応環境データベース
340 ネットワークインターフェース
【技術分野】
【0001】
本発明は、例えば歩行者の位置を測位するのに好適な測位装置と、当該測位装置を備える測位システムに関する。また、これらの測位装置および測位システムにおける測位方法と、測位装置に実行させるためのプログラムに関する。
【背景技術】
【0002】
近年、歩行者の位置情報を利用した多様なサービスが提供されるようになってきている。このようなサービスでは、歩行者を測位してその位置情報を得るための技術が必須となる。
【0003】
歩行者を測位するための技術として次のようなものが知られている。すなわち、加速度センサ、ジャイロセンサおよび磁気方位センサのセンサ出力を用いて歩行動作の移動方位と歩幅を推定するとともに、この推定された移動方位と歩幅の信頼性を算定する。そして、推定された移動方位と歩幅に基づいて基準位置からの相対移動ベクトルを推定するとともに、移動方位と歩幅の信頼性に基づいて上記相対移動ベクトルの信頼性を算定するというデッドレコニング装置の技術である(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−309803号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
歩行者の測位に関しては、センサの誤差と、センサ出力を利用した測位の誤差が避けられない。具体的に、地磁気センサによっては方位を検知できるが、エスカレータの上やエレベータの中、また、列車内や駅のホームでは地磁気が大幅に乱れる。このために、例えば歩行者は静止しているのに係わらず、地磁気センサにより計測した値は大きな変化を示しているような状態となる。このときの地磁気センサの出力は非常に信頼性が低いことになる。また、この地磁気センサのセンサ値を利用する測位についても信頼性は低くなる。また、
【0006】
このようなセンサ値および測位結果の誤差は周囲環境の影響により発生するために回避することが困難であり、したがって、現状において歩行者の測位を常に高い精度で行うことは難しい。なお、このような問題は、多くの施設が存在する都市環境において特に顕著となる。
【0007】
特許文献1の技術では、デッドレコニングにおいて推定される移動方位と歩幅の信頼性および相対性移動ベクトルの信頼性を算定することとしている。しかし、ここでの信頼性の算定は、例えば誤差分散による演算のみによるものであるために、現実の周囲環境ごとに対応して的確に信頼度を求めることは難しい。
【0008】
そこで本発明は上記した課題を考慮して、センサの信頼度が低下する周囲環境下であっても高い精度で測位が行えるようにすることを目的とする。
【課題を解決するための手段】
【0009】
本発明は、上記課題に鑑みてなされたものであり、それぞれが異なる対象を計測してセンサ値を出力する複数のセンサと、前記複数のセンサから出力されるセンサ値ごとに他の所定のセンサ値を利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手段と、前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手段と、前記複数の測位処理手段から出力される測位結果ごとに他の所定の測位結果を利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手段とを備えることを特徴とする測位装置である。
【0010】
また、本発明は、測位装置と、当該測位装置とネットワーク経由で通信するデータベースサーバを備え、前記測位装置は、位置と当該位置にて発生するセンサ値の誤差が少なくとも対応付けられたセンサ値対応環境データベース、および、位置と当該位置にて発生する測位結果の誤差が少なくとも対応付けられた測位結果対応環境データベースを前記データベースサーバから受信する受信手段と、それぞれが異なる対象を計測してセンサ値を出力する複数のセンサと、前記複数のセンサから出力されるセンサ値ごとに、他の所定のセンサ値と前記センサ値対応環境データベースを利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手段と、前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手段と、前記複数の測位処理手段から出力される測位結果ごとに、他の所定の測位結果と前記測位結果対応環境データベースを利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手段と、前記測位結果信頼度評価手段から出力される信頼度付き測位結果を統合して統合測位結果を出力する測位結果統合手段とを備え、前記データベースサーバは、前記センサ値対応環境データベースと前記測位結果対応環境データベースとを記憶する環境データベース記憶手段と、前記前記センサ値対応環境データベースと前記測位結果対応環境データベースを、前記測位装置に送信する送信手段とを備えることを特徴とする測位システムである。
【0011】
また、本発明は、それぞれが異なる対象を計測してセンサ値を出力する複数のセンサから出力されるセンサ値ごとに他の所定のセンサ値を利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手順と、前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手順と、前記複数の測位処理手順から出力される測位結果ごとに他の所定の測位結果を利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手順とを備えることを特徴とする測位方法である。
【0012】
また、本発明は、測位装置と、当該測位装置とネットワーク経由で通信するデータベースサーバを備える測位システムにおける測位方法であって、前記測位装置において、位置と当該位置にて発生するセンサ値の誤差が少なくとも対応付けられたセンサ値対応環境データベース、および、位置と当該位置にて発生する測位結果の誤差が少なくとも対応付けられた測位結果対応環境データベースを前記データベースサーバから受信する受信手順と、それぞれが異なる対象を計測してセンサ値を出力する複数のセンサから出力されるセンサ値ごとに、他の所定のセンサ値と前記センサ値対応環境データベースを利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手順と、前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手順と、前記複数の測位処理手順から出力される測位結果ごとに、他の所定の測位結果と前記測位結果対応環境データベースを利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手順と、前記測位結果信頼度評価手順から出力される信頼度付き測位結果を統合して統合測位結果を出力する測位結果統合手順とを備え、前記データベースサーバにおいて、環境データベース記憶部に記憶される前記センサ値対応環境データベースと前記測位結果対応環境データベースを前記測位装置に送信する送信手順とを備えることを特徴とする測位方法である。
【発明の効果】
【0013】
本発明によれば、周囲環境の影響によるセンサの信頼度低下に係わらず高い精度で測位が行われるという効果が得られる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態におけるセンサ値信頼度評価の処理例を示す図である。
【図2】本発明の実施の形態におけるセンサ値対応環境データベース131を用いたセンサ値信頼度評価の処理例を示す図である。
【図3】本発明の実施の形態における測位結果信頼度評価の処理例を示す図である。
【図4】本発明の実施の形態における測位結果対応環境データベース132を用いた測位結果信頼度評価の処理例を示す図である。
【図5】本発明の実施の形態における測位結果統合の処理例を示す図である。
【図6】本発明の実施の形態におけるセンサ値対応環境データベース131および測位結果対応環境データベース132の構造例を示す図である。
【図7】本実施の形態における測位システム1の構成例を示す図である。
【図8】本実施の形態における携帯型ナビゲーション装置100の構成例を示す図である。
【図9】本実施の形態におけるデータベースサーバ300の構成例を示す図である。
【図10】本実施の形態における測位部120の構成例を示す図である。
【図11】センサ部110におけるセンサ構成の具体例を示す図である。
【図12】測位並行処理部122における測位手法の具体例を示す図である。
【図13】本実施の形態において携帯型ナビゲーション装置100内のセンサ値対応環境データベース131および測位結果対応環境データベース132を更新するための処理例を示す図である。
【図14】本実施の形態においてデータベースサーバ300のセンサ値対応環境データベース331および測位結果対応環境データベース332を更新するための処理例を示す図である。
【図15】センサ値対応環境データベース331および測位結果対応環境データベース332を構築するための処理例を示す図である。
【図16】補正地点を決定するための処理例を示す図である。
【発明を実施するための形態】
【0015】
[本実施の形態の基本概念]
以下に、本発明を実施するための形態(実施の形態)について説明する。本実施の形態では、歩行者の位置を測定する測位を行うにあたり複数のセンサを使用する。なお、これら複数のセンサは、歩行者が所持する携帯型の携帯型ナビゲーション装置において備えられる。
【0016】
まず、本実施の形態における測位の基本概念について説明する。本実施の形態では、上記複数のセンサにより計測されたセンサ値ごとに信頼度を求め、信頼度としての値が付加されたセンサ値を生成して出力する。図1は、本実施の形態に対応するセンサ値の信頼度評価の基本的な処理態様例を示すものである(アクティビティ図)。ここでは、第1センサ〜第NセンサのN個のセンサが備えられているものとする。これら複数のセンサは、それぞれが異なる対象を計測する。
【0017】
図1においては、まず、第1〜第Nセンサによる計測処理1111−1〜1111−Nによって、それぞれが異なる対象を計測、検知する処理が並行して行われる。この第1〜第Nセンサによる計測処理1111−1〜1111−Nによって、第1センサ〜第Nセンサのそれぞれから第1センサ値11−1〜第Nセンサ値11−Nが出力される。
【0018】
センサ値信頼度評価処理1121は、上記第1センサ値11−1〜第Nセンサ値11−Nのそれぞれについて信頼度を評価する。このためにセンサ値信頼度評価処理1121は、信頼度を数値化して求める。そして、評価結果として、信頼度付き第1〜第Nセンサ値21−1〜21−Nを出力する。これら信頼度付きセンサ値21は、センサ値に対して信頼度を示す値が対応付けられた構造を有する。信頼度の数値表現については多様に考えることができるが、一例として、信頼度の値として100〜0の範囲を設定し、その数値が大きくなるほど信頼度が高いものとして扱うようにすることが考えられる。
【0019】
本実施の形態において、センサ値信頼度評価処理1121として、1つのセンサ値に対する信頼度は次のようにして求める。一例として第1センサ値11−1の信頼度を求めるにあたり、センサ値信頼度評価処理1121は、第1センサ値11−1以外の所定のセンサ値11を入力する。そして、センサ値信頼度評価処理1121は、第1センサ値11−1と、これに応じて選択した他のセンサ値11とを比較・解析する。一例として、センサ値信頼度評価処理1121は、第1センサ値11−1と他のセンサ値との変動パターンを比較する。この結果、歩行者の或る特定の状態に応じた値の変動パターンを示しているのに対して、第1センサ値11−1のみが異なるパターンを示していたとする。例えば、所定のアルゴリズムによってこのパターンの乖離の度合いを求めることにより、第1センサ値11−1の信頼度を求めることができる。そして、他のセンサ値11ごとについても、同様に、所定複数の他のセンサ値11を利用して信頼度を求めるようにする。
【0020】
このように、本実施の形態においては、1つのセンサ値の信頼度を求めるにあたり、他のセンサ値を利用する。これにより、例えば誤差分散のように確率統計演算のみを用いる場合と比較してより高い精度で信頼度を求めることができる。
【0021】
図2は、本実施の形態においてセンサ値信頼度評価を行うにあたり、周囲環境に関する情報を格納した環境データベースを用いた例を示している。この図において、図1と同一部分には同一符号を付して説明を省略する。この図におけるセンサ値信頼度評価処理1121は、1つのセンサ値11についての信頼度を求めるにあたり、センサ値対応環境データベース131のデータを利用する。
【0022】
図6は、センサ値対応環境データベース131の構造例を示している。図示するように、センサ値対応環境データベース131は、位置のデータに対して、それぞれ誤差情報と誤差発生要因のデータを対応付けた構造を有する。位置は、例えば緯度、経度および標高の3次元により表すことができる。誤差情報は、対応する位置においてセンサごとに発生する誤差についての情報である。この誤差情報の具体例として、例えば、誤差の発生量であってもよいし、理想のセンサ値に対する誤差の比率として表されてもよい。誤差発生要因は、その位置において誤差情報が示す誤差を発生させる要因が何であるのかを示す情報である。一例として、センサ値対応環境データベース131が格納する或る位置が地下鉄のホームであるとする。地下鉄のホームでは地磁気が乱れるため、地磁気センサは、歩行者が静止していても、ランダムに変動するような変動を示す。この場合、地磁気センサに対応する誤差情報は、センサ値がランダムに変動することを示す。また、誤差発生要因として、地下鉄のホームであることにより地磁気の乱れが発生することを示す情報が格納される。
【0023】
図2におけるセンサ値信頼度評価処理1121は、他の複数のセンサ値を利用するとともに、上記構造のセンサ値対応環境データベース131を利用して、センサ値11の信頼度を求める。例えば、センサ値信頼度評価処理1121は、現在の位置情報に該当する位置をセンサ値対応環境データベース131から検索し、検索された位置に対応付けられた誤差および誤差発生要因を参照する。これにより、信頼度を求めるべきセンサ値の誤差と誤差発生要因を用いてして、より高い精度で信頼度を設定することができる。例えば、実際に地下鉄のホームに位置していて地磁気センサのセンサ値が大きく乱れているとしても、センサ値対応環境データベース131が無いとすれば、単に他のセンサ値との相違に基づいてしか信頼度を求められない。この場合、むやみに信頼度を低くすることはできない。これに対して、図2の構成では、センサ値対応環境データベース131の誤差情報が示すとおりの誤差であれば、誤差発生要因が地下鉄のホームにおける地磁気の乱れであると非常に高い確率で推定できる。したがって、この場合には信頼度を相当に低く設定することができる。
【0024】
本実施の形態においては、上記のように信頼度が付加された信頼度付きセンサ値21を利用して測位を行う。そして、測位に際しては、異なる複数の測位手法(測位アルゴリズム)を並行して行い、複数の測位結果を得る。さらに、これら複数の測位結果についても信頼度を求める。
【0025】
図3は、本実施の形態における測位結果信頼度評価として最も基本的な処理例を示している。本実施の形態においては、第1〜第M手法測位処理1123−1〜1123−Mによって、それぞれが異なる測位手法による測位処理が並行して実行される。これら第1〜第M手法測位処理1123−1〜1123−Mの測位の各々は、図1または図2に示したN個の信頼度付きセンサ値21−1〜21−Nのうちから所定の1以上のセンサ値21を入力して、所定の手法(アルゴリズム)による測位処理を実行する。これにより、図示するように、第1〜第M手法測位処理1123−1〜1123−Mごとに応じて、第1〜第M測位結果23−1〜23−Mが出力される。
【0026】
測位結果信頼度評価処理1124は、上記第1〜第M測位結果23−1〜23−Mごとの信頼度を求める。この測位結果信頼度評価処理1124によって1つの測位結果23の信頼度を求めるにあたっては、他の1以上の測位結果23を利用する。この測位結果信頼度評価処理1124により、第1〜第M測位結果23−1〜23−Mごとに信頼度が付加された、信頼度付き第1〜第M測位結果24−1〜24−Mが出力される。このように、測位結果23についても他の測位結果を利用することで高い精度で信頼度を求めることが可能になる。
【0027】
図4は、本実施の形態において測位結果信頼度評価を行うにあたり、環境データベースを用いた例を示している。この図において、図3と同一部分には同一符号を付して説明を省略する。この図における測位結果信頼度評価処理1124は、測位結果23についての信頼度を求めるにあたり、測位結果対応環境データベース132のデータを利用する。
【0028】
測位結果対応環境データベース132の構造としては、例えば先に説明した図6と同様のものを考えることができる。この場合の誤差情報はセンサ値についてのものではなく、測位結果としての値についてのものとなる。
【0029】
そして、本実施の形態においては、上記図3または図4のようにして得られた複数の信頼度付き第1〜第M測位結果24−1〜24−Mを利用して、最終的に1つの測位結果、すなわち位置情報を求める。図5は、この位置情報を求めるための処理例を示している。
【0030】
図5に示す測位結果統合処理1125は、信頼度付き第1〜第M測位結果24−1〜24−Mを入力する。そして、信頼度付き第1〜第M測位結果24−1〜24−Mの各々に付加された信頼度を利用し、例えば所定の確率統計アルゴリズムを用いることにより1つの統合された測位結果を算出する。このように算出された統合測位結果が位置情報25として出力される。この位置情報25は、例えば携帯型ナビゲーション装置などのアプリケーションによって利用される。
【0031】
[測位システムの構成例]
図7は、本実施の形態における測位システム1の構成例を示している。この図における測位システム1は、携帯型ナビゲーション装置100、アクティブタグ200およびデータベースサーバ300から成る。
【0032】
携帯型ナビゲーション装置100は、歩行者が携帯可能な形状サイズを有しており、これまでに説明した本実施の形態の歩行者測位の概念が適用された測位機能を有する。すなわち、携帯型ナビゲーション装置100によって、これを携帯している歩行者についての測位が行われる。この携帯型ナビゲーション装置100は、例えば専用の携帯型ナビゲーション装置であってもよい。また、歩行者ナビゲーション用のアプリケーションを実装した携帯電話、スマートフォンやタブレット型端末装置などを想定することもできる。
【0033】
アクティブタグ200は、例えば外部環境における要所ごとに設置される環境設置型のRFIDタグである。したがって、アクティブタグ200は、外部環境において多数が設置されることになるが、図においては、異なる場所に設置された2つのアクティブタグ200−1および200−2が示されている。これらのアクティブタグ200は、タグ通信エリアARとして示す数メートル程度の通信可能範囲に位置している携帯型ナビゲーション装置100と無線通信を行うことができる。図の例では、携帯型ナビゲーション装置100がアクティブタグ200−1のタグ通信エリアAR内に位置していることで、アクティブタグ200−1と通信可能な状態であることが示されている。アクティブタグ200の各々は、タグ情報として、例えば自己が設置された場所についての位置情報や、その場所における施設や環境に関する情報(例えば屋内、屋外、地下、エレベータであるなどの情報)を記憶している。携帯型ナビゲーション装置100は、アクティブタグ200と通信を行うことにより、上記タグ情報を取得することができる。
【0034】
データベースサーバ300は、後述するように環境データベースを記憶している。携帯型ナビゲーション装置100は、無線通信によりネットワーク400経由でデータベースサーバ300にアクセスし、環境データベースをダウンロードして記憶する。携帯型ナビゲーション装置100は、ダウンロードした環境データベースを利用して測位を実行する。
【0035】
[携帯型ナビゲーション装置の構成例]
図8は、携帯型ナビゲーション装置100の構成例を示している。図示するように、携帯型ナビゲーション装置100は、センサ部110、測位部120、環境データベース記憶部130、ネットワーク通信部140、ナビゲーション部150、表示部160、操作部170、データベース更新部180、およびネットワークインターフェース190を備える。
【0036】
センサ部110は、第1〜第Nセンサ111−1〜111−NのN個のセンサからなる部位である。これら第1〜第Nセンサ111−1〜111−Nの各々は、それぞれが異なる対象を計測、検知するセンサであり、同時並行で計測、検知動作を行う。また、これらの第1〜第Nセンサ111−1〜111−Nのうちの1つには、図示するように、アクティブタグ200と通信を行うタグセンサ111tgが備えられる
【0037】
測位部120は、上記第1〜第Nセンサ111−1〜111−Nから出力されるN個のセンサ値を入力して位置情報(統合測位結果)を出力する部位である。すなわち、測位部120は、図1乃至図5により説明したセンサ値信頼度評価処理1121、測位結果信頼度評価処理1124および測位結果統合処理1125の処理を行うように構成されている。
【0038】
環境データベース記憶部130は、センサ値対応環境データベース131および測位結果対応環境データベース132を保持する。これらセンサ値対応環境データベース131および測位結果対応環境データベース132は、ネットワーク400を介した無線通信によりデータベースサーバ300からダウンロードして取得する。後述するように、センサ値対応環境データベース131は、測位部120がセンサ値信頼度評価を行う際に利用される。測位結果対応環境データベース132は、測位部120が測位結果信頼度評価を行う際に利用される。なお、環境データベース記憶部130が対応するハードウェアとしては、例えばフラッシュメモリ、HDD(ハードディスクドライブ)などを挙げることができる。
【0039】
ネットワーク通信部140は、ネットワーク400経由での通信を行うための通信モジュールである。ネットワークインターフェース190はネットワーク通信部140の制御に応じてネットワーク400との間でデータの送受信を実行する部位である。これらネットワーク通信部140およびネットワークインターフェース190の動作によって、データベースサーバ300から、センサ値対応環境データベース131および測位結果対応環境データベース132のデータをダウンロードすることができる。
【0040】
ナビゲーション部150は、測位部120から出力される位置情報を利用してナビゲーションに関する各種の動作を実行するモジュールである。このナビゲーション部150は、例えばナビゲーション機能のためのアプリケーションプログラムによって実現される。ナビゲーション部150により実現される行われるナビゲーションサービスの具体例については多様に考えられることから、ここでの説明は省略する。
【0041】
表示部160は、ナビゲーション部150の制御に応じてユーザインターフェース画像が表示される。例えば地図上における歩行者の位置をはじめ、各種のサービスに関する情報が所定の態様によって表示される。操作部170は、携帯型ナビゲーション装置100に対してユーザ(歩行者)が操作を行うための操作子を一括して示している。この操作部170としては、例えば携帯型ナビゲーション装置100に備えられるボタン、キーなどのほか、表示部160にタッチパネルが配置されているのであれば、このタッチパネルなども含まれる。
【0042】
データベース更新部180は、測位部120におけるセンサ値および測位結果についての信頼度評価結果に基づいて、センサ値対応環境データベース131および測位結果対応環境データベース132を更新するための処理を実行する。また、データベース更新部180は、測位部120にて得られたセンサ値および測位結果についての信頼度評価結果をネットワーク400経由でデータベースサーバ300に送信することで、環境データベースの更新要求も実行可能とされている。データベースサーバ300は、上記の更新要求に応じて、受信した評価結果を利用して自己が記憶している環境データベースの内容を更新することができる。
【0043】
[データベースサーバの構成例]
図9は、データベースサーバ300の構成例を示している。この図に示すデータベースサーバ300は、ネットワーク通信部310、データベース管理部320、環境データベース記憶部330およびネットワークインターフェース340を備える。
【0044】
ネットワーク通信部310は、ネットワークインターフェース340を介してネットワーク400経由で通信を行うためのモジュールである。
【0045】
環境データベース記憶部330は、環境データベースとして、センサ値対応環境データベース331および測位結果対応環境データベース332の2つを記憶する部位であり、ハードウェアとしては例えばHDDなどが用いられる。
【0046】
データベース管理部320は、環境データベース記憶部330に記憶されるセンサ値対応環境データベース331および測位結果対応環境データベース332のデータを管理する部位である。具体例として、携帯型ナビゲーション装置100からのダウンロード要求に応じたセンサ値対応環境データベース331および測位結果対応環境データベース332のアップロードを実行する。
【0047】
データベース管理部320によりアップロードされたセンサ値対応環境データベース331は、携帯型ナビゲーション装置100の環境データベース記憶部130においてセンサ値対応環境データベース131として記憶される。また、アップロードされた測位結果対応環境データベース332は、携帯型ナビゲーション装置100の環境データベース記憶部130において測位結果対応環境データベース132として記憶される。また、データベース管理部320は、携帯型ナビゲーション装置100からの更新要求に応じて、センサ値対応環境データベース331および測位結果対応環境データベース332の更新処理を実行する。
【0048】
[携帯型ナビゲーション装置の構成例]
図10は、測位部120の構成例を示している。なお、この図においては、説明の便宜上、測位部120を構成する部位とともに、各部位において入出力されるデータも示している。この図に示す測位部120は、センサ値信頼度評価部121、測位並行処理部122、測位結果信頼度評価部124および測位結果統合部125を備える。
【0049】
第1〜第Nセンサ111−1〜111−N(図10においては図示を省略)からは、それぞれ、第1〜第Nセンサ値11−1〜11−Nが出力される。センサ値信頼度評価部121は、上記第1〜第Nセンサ値11−1〜11−Nを入力するとともに、センサ値対応環境データベース131を参照することにより、図1および図2に示したセンサ値信頼度評価処理1121を実行し、信頼度付き第1〜第Nセンサ値21−1〜21−Nを出力する。これまでの説明から理解されるように、信頼度付き第1〜第Nセンサ値21−1〜21−Nは、それぞれ、信頼度の値が対応付けられた第1〜第Nセンサ値11−1〜11−Nである。
【0050】
測位並行処理部122は、第1〜第M手法測位処理部123−1〜123−Mを備える。第1〜第M手法測位処理部123−1〜123−Mは、それぞれが異なる測位手法(アルゴリズム)による測位を同時並行して実行する。また、第1〜第M手法測位処理部123−1〜123−Mは、その測位手法に応じて、信頼度付き第1〜第Nセンサ値21−1〜21−Nのうちから所定の1以上の信頼度付きセンサ値21を選択的に入力して測位処理を実行する。第1〜第M手法測位処理部123−1〜123−Mは、各々の測位処理を実行することにより、それぞれ、第1〜第M測位結果23−1〜23−Mを出力する。
【0051】
測位結果信頼度評価部124は、上記第1〜第M測位結果23−1〜23−Mを入力するとともに、測位結果対応環境データベース132を参照することにより、図3および図4により説明した測位結果信頼度評価処理1124を実行する。そして、測位結果信頼度評価部124は、信頼度評価処理の結果として、信頼度付き第1〜第M測位結果24−1〜24−Mを出力する。これら信頼度付き第1〜第M測位結果24−1〜24−Mは、それぞれ、信頼度の値が対応付けられた第1〜第M測位結果23−1〜23−Mである。
【0052】
測位結果統合部125は、上記信頼度付き第1〜第M測位結果24−1〜24−Mを入力して測位結果統合処理1125(図5)を実行し、統合結果として求められた位置情報(統合測位結果)25を出力する。この位置情報25は、ナビゲーション部150によって利用される。
【0053】
[携帯型ナビゲーション装置の具体的構成例]
図11および図12を参照して、携帯型ナビゲーション装置100におけるセンサ111と測位並行処理部122における測位手法の一具体例について説明する。図11において、センサ部110は、センサ111として、GPS受信部111a、気圧センサ111b、環境知識データベース111c、加速度センサ111d、地磁気センサ111e、ジャイロセンサ111f、タグセンサ111gを備えるものとしている。これらのセンサ(111a〜111g)は、図8との対応では、センサ111−1〜111−Nに対応宇する。
【0054】
GPS受信部111aは、GPS衛星からの電波を受信して、衛星からの距離などの位置算出に利用すべき所定の情報(GPS情報11a)を取得する部位である。気圧センサ111bは、気圧11bの値を計測して出力する。環境知識データベース111cは、携帯型ナビゲーション装置100において記憶されている地図情報であり、この地図情報において示される施設などの環境についての情報を環境情報11cとして出力する。この環境知識データベース111cは、本実施の形態の場合には、ナビゲーション部150が利用するデータを利用することができる。
【0055】
加速度センサ111dは、動きに応じた加速度値11dを計測して出力する。地磁気センサ111eは、地磁気を検出することにより方位11eを計測して出力する。ジャイロセンサ111fは、動きに応じた角速度値11fを計測して出力する。タグセンサ111gは、図8のタグセンサ111tgと同じものであり、通信可能なアクティブタグ200からタグ情報11gを受信取得し、これを出力する。
【0056】
また、環境知識データベース111cの地図情報をもとにして、センサ値としてマップ情報11hも派生的に生成される。マップ情報11hは、地図としての図形データに相当する。また、加速度センサ111d、地磁気センサ111eおよびジャイロセンサ111fの各センサ出力を利用して行動情報11iも生成される。行動情報は、例えば歩行者の行動として、停止、歩行、走行などを区別して示すものである。
【0057】
センサ値信頼度評価部121は、評価対象のセンサ値として、上記GPS情報11a、気圧11b、環境情報11c、加速度値11d、方位11e、角速度値11f、タグ情報11g、マップ情報11hおよび行動情報11iを入力する。そして、センサ値信頼度評価部121は、センサ値対応環境データベース131を参照して各センサ値の信頼度を求め、次の信頼度付きセンサ値を出力する。つまり、信頼度付きGPS情報21a、信頼度付き気圧21b、信頼度付き環境情報21c、信頼度付き加速度値21d、信頼度付き方位21e、信頼度付き角速度値21f、信頼度付きタグ情報21g、信頼度付きマップ情報21hおよび信頼度付き行動情報21iを出力する。
【0058】
次に、図12を参照して、測位並行処理部122における測位手法の具体例について説明する。上記図11のセンサ値信頼度評価部121から出力された信頼度付きセンサ値(11a〜11iは、次に述べるようにして測位並行処理部122における所定の手法による測位処理部(123a〜123q)が適宜利用する。図10の第1手法測位処理部123−1〜123−Mは、測位処理部(123a〜123q)単体または複数の組み合わせによって形成されるものとなる。
【0059】
まず、測位並行処理部122における測位処理部(123)として、位置算出部123aは、GPS情報11aを入力して現在位置を算出し、この算出結果(測位結果)を位置情報23aとして出力する。この位置情報23aは、例えば緯度、経度および高度により表現される。
【0060】
位置算出部123bは、信頼度付き環境情報21cおよび信頼度付きマップ情報21hを利用して、環境情報およびマップ情報に基づいて現在位置を算出し、位置情報23bとして出力する。
【0061】
高度/階数推定部123cは、信頼度付き気圧21bおよび信頼度付きマップ情報21hを利用して、高度または階数を推定し、この推定結果(測位結果)を高度/階数情報23cとして出力する。この高度/階数推定部123cは、基本的には、信頼度付き気圧21bに基づいて高度を算出するが、信頼度付きマップ情報21hに基づいて現在の位置情報が階段のある場所を示しているような場合には、高度に基づいて階数も推定する。
【0062】
また、高度/階数推定部123dは、後述の歩数推定部123mにより推定された歩数と信頼度付き信頼度付きマップ情報21hを利用して高度または階数を推定し、推定結果(測位結果)として高度/階数情報23dを出力する。例えば、高度/階数推定部123dは、信頼度付き信頼度付きマップ情報21hに基づいて現在の位置情報が示す場所が平地であるのか、あるいは傾斜地や階段などであるのかを判定する。そして、傾斜地や階段であると判定した場合には、歩数に基づいて高度または階数を推定する。
【0063】
マップマッチング処理部123eは、信頼度付きマップ情報21h、信頼度付き加速度値21d、信頼度付き方位21eおよび信頼度付き角速度値21fを入力して、マップマッチング処理を実行する。すなわち、信頼度付き加速度値21d、信頼度付き方位21eおよび信頼度付き角速度値21fにより算出される位置を、信頼度付きマップ情報21hが示すマップ上にマッチングさせることにより位置を推定する。このように推定した位置を、位置情報23eとして出力する。
【0064】
位置算出部123fは、信頼度付き環境情報21c、信頼度付きマップ情報21h、信頼度付き行動情報21i、信頼度付き加速度値21d、信頼度付き方位21eおよび信頼度付き角速度値21fを利用して位置を算出し、位置情報23fを出力する。信頼度付き行動情報21iに基づいて推定された歩行者の行動は、信頼度付き環境情報21cおよび信頼度付きマップ情報21hが示す周囲環境の情報と照らし合わせることにより、より詳細に推定される。例えば、信頼度付き環境情報21cおよび信頼度付きマップ情報21hにより、歩行中の場所は階段であるという情報が得られる。そのうえで、信頼度付き加速度値21d、信頼度付き方位21eおよび信頼度付き角速度値21fを利用することで歩行者が階段を上り下りしている状態を推定して、高度を含む現在の位置を推定することができる。
【0065】
位置算出部123gは、信頼度付き加速度値21dを利用して求められる移動距離に基づいて位置を算出し、位置情報23gとして出力する。
【0066】
位置算出部123hは、後述する姿勢推定部123jにより推定された姿勢の情報と、歩数推定部123mにより推定された歩数の情報と、歩幅推定部123nにより推定された歩幅の情報とを利用して位置を算出し、位置情報23hとして出力する。
【0067】
位置算出部123iは、姿勢推定部123kにより推定された姿勢の情報と、歩幅推定部123nにより推定された歩幅の情報とを利用して位置を算出し、位置情報23iとして出力する。
【0068】
姿勢推定部123jは、信頼度付き加速度値21d、信頼度付き方位21e、姿勢補正部123pから出力される姿勢補正データとを利用して姿勢を推定する。すなわち、信頼度付き加速度値21dおよび信頼度付き方位21eを利用して、姿勢として、例えばどの方位に向かってどの程度の速度で移動しているのか推定する。姿勢補正データは、上記のように信頼度付き加速度値21dおよび信頼度付き方位21eを利用した推定された姿勢の誤差を補正するために利用する。このようにして推定された姿勢の情報は前述のように位置算出部123hが利用する。
【0069】
姿勢推定部123kは、信頼度付き加速度値21d、信頼度付き角速度値21fおよび姿勢補正部123pからの姿勢補正データを利用して姿勢を推定する。信頼度付き加速度値21dおよび信頼度付き角速度値21fにより、歩行者の姿勢として例えば移動方向が求められる。また、このようにして求められた姿勢の誤差を姿勢補正データにより補正する。この姿勢推定部123kにより推定された姿勢の情報は、前述のように、位置算出部123iが利用する。
【0070】
姿勢補正部123pは、信頼度付きタグ情報21gを利用して姿勢補正データを生成する。信頼度付きタグ情報21gは、アクティブタグ200の設置位置に応じた正確な位置を有している。姿勢推定部123jおよび123kにて推定された姿勢に基づいて求められる位置と、信頼度付きタグ情報21gが示す位置とを比較することで、例えば推定された姿勢として示される移動方向などの誤差が求められる。そこで、姿勢補正部123pは、この誤差を補正するための補正量を姿勢補正データとして出力する。
【0071】
歩数推定部123mは、信頼度付き加速度値21dの時間軸における変動パターンに基づいて歩数を推定する。推定された歩数の情報は、前述のように、高度/階数推定部123dおよび位置算出部123hが利用する。
【0072】
歩幅推定部123nは、信頼度付き加速度値21dの変動周期に基づいて歩幅を推定する。また、このように推定された歩幅の誤差を、歩幅補正部123qにより得られた歩幅推定データを利用して補正する。
【0073】
歩幅補正部123qは、歩数推定部123mにより推定された歩数の情報と信頼度付きタグ情報21gに基づいて歩幅補正データを生成する。例えば歩行者が移動するのに応じて、異なる場所に配置されたアクティブタグ200のそれぞれから信頼度付きタグ情報21gが得られる。これらの信頼度付きタグ情報21gが示す位置情報から移動距離が求められるが、この移動距離と歩数の情報とを利用すれば信頼性の高い歩幅が求められる。歩幅補正部123qは、このように求めた歩幅の情報を歩幅補正データとして出力する。
【0074】
これまでの説明のようにして、図12に示す測位並行処理部122においては、異なるアルゴリズムによる測位処理が並行して行われる。そして、これらの測位処理の結果、測位結果23として、位置情報23a、23b、23e、23f、23g、23h、23i、および、高度/階数情報23c、23dを出力する。
【0075】
そして、測位結果信頼度評価部124は、測位結果対応環境データベース132を利用して、上記の測位結果ごとについての信頼度を求める処理を行い、信頼度付き測位結果24を出力する。すなわち、図示するように、信頼度付き位置情報24a、24b、24e、24f、24g、24h、24i、および、信頼度付き高度/階数情報24c、24dを出力する。そして、測位結果統合部125は、信頼度付き測位結果24を入力して統合処理に利用する。これにより、最終的に1つの位置情報25が出力される。
【0076】
なお、測位結果信頼度評価部124およびセンサ値信頼度評価部121において信頼度を算出するアルゴリズムの具体例としては、例えば決定木、ニューラルネットワーク、強化学習アルゴリズム、ベイズ推定などの確率的推定手法など挙げることができる。
【0077】
また、測位結果統合部125が測位結果24を統合するためのアルゴリズムとしても、確率統計に基づく演算手法を用いることができる。また、パーティクルフィルタ、カルマンフィルタ、ベイジアンネットワークなどを適用することもできる。
【0078】
[環境データベースを更新するための構成]
センサ値11および測位結果23の信頼度評価に用いられるセンサ値対応環境データベース131および測位結果対応環境データベース132は、図6に示したように、位置ごとに対してセンサ値の誤差および誤差発生要因の情報を対応付けたレコードの集合として形成される。このために、例えば施設の増設あるいは撤去などにより周囲環境が変化した場合には、環境データベース(センサ値対応環境データベース131および測位結果対応環境データベース132)の内容の一部に誤りが生じることになる。このことからすれば、周囲環境の変化に対応して、環境データベースの内容の追加や変更が行われるようにすることが好ましい。
【0079】
本実施の形態では、携帯型ナビゲーション装置100が備えるデータベース更新部180(図8)を備えることで、環境データベースの内容を更新可能とされている。以下に、この点について説明する。
【0080】
図13(a)は、センサ値対応環境データベース131の更新処理例を模式的に示している。まず、センサ値信頼度評価部121は、これまでの説明のように、センサ値信頼度評価処理1121を実行して信頼度付きセンサ値21を出力する。データベース更新部180は、この信頼度付きセンサ値21を入力して、センサ値対応環境データベース更新処理1180−1を実行する。
【0081】
データベース更新部180は、センサ値対応環境データベース更新処理1180−1として、例えば次のように処理を実行する。データベース更新部180は、センサ値対応環境データベース131から、最新の位置情報25と同じ場所を示す位置を検索する。ここで、位置が検索されなかった場合には、最新の位置情報25に対して、入力した信頼度付きセンサ値21から求めたセンサ値の誤差を対応付けてレコードを形成し、センサ値対応環境データベース131に対して新規登録を行う。
【0082】
また、センサ値対応環境データベース131から位置情報25に対応する場所の位置が検索された場合には、この位置に対応付けられている誤差情報と、入力した信頼度付きセンサ値21から求められる誤差とを比較する。ここで両者が同等とみてよい値であれば更新は行わない.これに対して、両者の値が一定以上に乖離しており同等と見ることができない場合には、環境の変化によりセンサ値に誤差を発生させる要因が変化していることが推定される。そこで、この場合には、入力した信頼度付きセンサ値21により求められた誤差の値が反映されるように誤差情報を書き換える。
【0083】
図13(b)は、測位結果対応環境データベース132の更新処理例を模式的に示している。まず、測位結果信頼度評価部124は、測位結果信頼度評価処理1124を実行して信頼度付き測位結果24を出力する。データベース更新部180は、この信頼度付き測位結果24を入力して、測位結果対応環境データベース更新処理1180−2を実行する。
【0084】
データベース更新部180は、測位結果対応環境データベース更新処理1180−2として、上記センサ値対応環境データベース更新処理1180−1に準じた処理により、測位結果対応環境データベース132に対する新規登録または書き換えを行う。
【0085】
このように本実施の形態では、携帯型ナビゲーション装置100が記憶するセンサ値対応環境データベース131および測位結果対応環境データベース132の内容を、センサ値の信頼度および測位結果の信頼度に基づいて更新することができる。
【0086】
上記の構成は、携帯型ナビゲーション装置100の内部にて記憶している環境データベースを更新するものであるが、環境データベースは、データベースサーバ300にも記憶されている。このデータベースサーバ300に記憶される環境データベースも更新できるようにすれば、多数のナビゲーション装置100がダウンロードする環境データベースの内容が外部環境に応じて常にアップデートされることとなって好ましい。そこで、図14により、携帯型ナビゲーション装置100からデータベースサーバ300が記憶する環境データベースを更新するための構成について説明する。
【0087】
図14(a)は、センサ値対応環境データベース331の更新処理例を示している。携帯型ナビゲーション装置100においてデータベース更新部180は、センサ値信頼度評価部121のセンサ値信頼度評価処理1121によって得られる信頼度付きセンサ値21を入力する。そして、データベース更新部180は、データベースサーバ300に対してネットワーク400経由でセンサ値対応環境データベース331の更新を要求する更新要求送信処理1180−3を実行する。この更新要求送信処理1180−3処理として、データベース更新部180は、更新要求181とともに信頼度付きセンサ値21をデータベースサーバ300に対して送信する。
【0088】
データベースサーバ300において受信された上記更新要求181は、データベース管理部320に入力される。データベース管理部320は、入力された更新要求181に応じてセンサ値対応環境データベース更新処理1320−1の処理を実行する。このセンサ値対応環境データベース更新処理1320−1としては、更新要求181とともに送信された信頼度付きセンサ値21を利用して、先に図13(a)により説明したセンサ値対応環境データベース更新処理1180−1と同様の処理を実行すればよい。
【0089】
図14(b)は、測位結果対応環境データベース332の更新処理例を示している。携帯型ナビゲーション装置100においてデータベース更新部180は、測位結果信頼度評価部124が実行する測位結果信頼度評価処理1124によって得られる信頼度付き測位結果24を入力する。次に、データベース更新部180は、データベースサーバ300に対してネットワーク400経由で測位結果対応環境データベース332の更新を要求する更新要求送信処理1180−4を実行する。この処理として、データベース更新部180は、更新要求182とともに信頼度付き測位結果24をデータベースサーバ300に対して送信する。
【0090】
データベース管理部320は、受信された更新要求181に応じて測位結果対応環境データベース更新処理1320−2の処理を実行する。この測位結果対応環境データベース更新処理1320−2は、先に図13(b)により説明した測位結果対応環境データベース更新処理1180−2に準じたものとなる。
【0091】
このように本実施の形態では、携帯型ナビゲーション装置100において求められたセンサ値の信頼度および測位結果の信頼度に基づいて、データベースサーバ300が記憶するセンサ値対応環境データベース331および測位結果対応環境データベース332の内容を更新することができる。
【0092】
[環境データベースの作成手順例]
データベースサーバ300に記憶させる環境データベース(センサ値対応環境データベース331および測位結果対応環境データベース332)は、事前に、本実施の形態の携帯型ナビゲーション装置100に対応するナビゲーションサービスを提供する事業者が構築して用意する。そこで、図15により、環境データベースを構築する手順例について説明する。
【0093】
このためには、まず、現地において予め決めておいた計測経路について、実際にセンサ部110を構成するセンサ111による計測を行い、そのセンサ値を収集する。このように収集されたセンサ値は、図15において、現地計測センサ値11Aとして示されている。
【0094】
次に、測位並行処理部122Aにより、例えば収集した現地の現地計測センサ値11Aを利用して測位を実行させる。測位並行処理部122Aは、例えば図10に示した携帯型ナビゲーション装置100における測位並行処理部122と同様の測位機能を有する。すなわち、複数の異なる測位手法による測位処理を並行して実行することにより、複数の測位結果を出力する。この場合には、現地における計測位置ごとに対応して複数の測位手法に応じた複数の測位結果が得られる。図15では、計測位置ごとに対応する複数の測位結果の集合を、測位結果23Aとして一括して示している。
【0095】
また、環境データベースを構築するにあたり、上記現地計測センサ値11Aおよび測位結果23Aのほかに、正解データ31および環境情報32を利用する。正解データ31は、現地計測センサ値11Aの収集に際して実際に通過した経路に対応する位置と、その位置を通過した際の時間などからなる情報である。つまり、正しい測位結果として扱われる情報(測位結果対応正解データ)を有する。また、現地計測センサ値11Aの収集に際して実際に通過した経路において、外部環境の影響を排除した場合に計測されるものとしてシミュレートしたセンサ値の情報(センサ値対応正解データ)を有する。環境情報32は、特定のセンサの計測に誤差を生じる位置やその誤差発生要因の情報や、特定の測位手法による測位結果に誤差を生じる位置やその誤差発生要因の情報などとなる。
【0096】
環境データベース構築部500は、正解データ31(センサ値対応正解データ)と、環境情報32を利用してセンサ値対応環境データベース331を構築する。例えば、環境データベース構築部500は、現地計測センサ値11Aと正解データ31(センサ値対応正解データ)とを照合することにより、現地計測センサ値11Aの誤差を算出できる。また、環境情報32から誤差の生じた位置の誤差発生要因を特定できる。これにより、位置に対してセンサ値の誤差情報と誤差発生要因の情報を対応付けて、センサ値対応環境データベース331を構築することができる。
【0097】
また、環境データベース構築部500は、測位結果23Aと、正解データ31(測位結果対応正解データ)と、環境情報32を利用して測位結果対応環境データベース332を構築する。環境データベース構築部500は、測位結果23Aと正解データ31(測位結果対応正解データ)とを照合することにより測位結果23Aの誤差を算出し、環境情報32から誤差発生要因を特定する。そして、位置に対して測位結果の誤差情報と誤差発生要因の情報を対応付けて、測位結果対応環境データベース332を構築する。
【0098】
そして、環境データベース構築部500は、このように構築されたセンサ値対応環境データベース331および測位結果対応環境データベース332を、データベースサーバ300の環境データベース記憶部330に書き込んで記憶させる。
【0099】
[補正地点決定例]
これまでの説明から理解されるように、本実施の形態の携帯型ナビゲーション装置100は、測位手法として自律航法型も採用している。現状の自律航法型による測位では時間経過に応じた誤差の累積を避けることが難しい。そこで、本実施の形態の測位システム1では、アクティブタグ200を周囲環境に設置し、このアクティブタグ200の情報によって測位結果を補正するようにしている。
【0100】
アクティブタグ200を設置する位置を多くすれば、それだけ測位結果が補正される場所が増えるために位置情報の精度も高くなる。しかし、アクティブタグ200を設置する場所が多くなるほどコストアップになってしまう。これを回避するには、センサ値や計測結果の信頼性の高い地点は避けて、信頼性の低い地点に対してアクティブタグ200を重点的に設置すればよい。このためには、センサ値や計測結果の信頼性の低い地点を効率的に特定する必要がある。
【0101】
そこで、図16を参照して、本実施の形態における補正地点特定のための手順例について説明する。補正地点の特定は、補正地点決定部600が実行する。この補正地点決定部600は、図示するように、要求精度情報350と、センサ値対応環境データベース331および測位結果対応環境データベース332を用いる。要求精度情報350は、センサ値および測位結果として要求される精度を示す情報である。
【0102】
補正地点決定部600は、要求精度情報350とセンサ値対応環境データベース331のデータを利用して、位置ごとのセンサ値の精度分布を判定する。また、要求精度情報350と測位結果対応環境データベース332のデータを利用して、位置ごとの測位結果の精度分布を判定する。そして、これらの精度分布の情報から、センサ値と測位結果の信頼性が一定以下の地点を特定するための解析処理を実行する。このように特定された地点が補正地点となる。そして、事業者は、特定された補正地点に対してアクティブタグ200を設置する、タグ設置作業1700を行う。これにより、アクティブタグ200は、センサ値や測定結果の信頼性が低くなる環境に対して重点的に設置されることになる。つまり、必要最小限のアクティブタグ200を有効に設置して十分な位置推定精度を得ることができる。
【0103】
なお、本実施の形態においてこれまでに説明した処理手順は、これら一連の手順を有する方法として捉えることができる。また、これら一連の手順をコンピュータに実行させるためのプログラムまたはそのプログラムを記憶する記録媒体として捉えることができる。この記録媒体としては、例えば、ブルーレイディスク(Blu−ray Disc(登録商標))、DVD(Digital Versatile Disk)、HDD(ハードディスク)、メモリカード等を挙げることができる。
【符号の説明】
【0104】
1 測位システム
100 携帯型ナビゲーション装置
110 センサ部
111−1〜111−N センサ
120 測位部
121 センサ値信頼度評価部
122 測位並行処理部
123−1〜123−M 第1〜第M手法測位処理部
124 測位結果信頼度評価部
125 測位結果統合部
130 環境データベース記憶部
131 センサ値対応環境データベース
132 測位結果対応環境データベース
140 ネットワーク通信部
150 ナビゲーション部
160 表示部
170 操作部
180 データベース更新部
190 ネットワークインターフェース
200 アクティブタグ
300 データベースサーバ
310 ネットワーク通信部
320 データベース管理部
330 環境データベース記憶部
331 センサ値対応環境データベース
332 測位結果対応環境データベース
340 ネットワークインターフェース
【特許請求の範囲】
【請求項1】
それぞれが異なる対象を計測してセンサ値を出力する複数のセンサと、
前記複数のセンサから出力されるセンサ値ごとに他の所定のセンサ値を利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手段と、
前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手段と、
前記複数の測位処理手段から出力される測位結果ごとに他の所定の測位結果を利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手段と、
を備えることを特徴とする測位装置。
【請求項2】
前記測位結果信頼度評価手段から出力される信頼度付き測位結果を統合して統合測位結果を出力する測位結果統合手段をさらに備える、
ことを特徴とする請求項1に記載の測位装置。
【請求項3】
前記センサ値信頼度評価手段は、
前記センサ値の信頼度の評価にあたり、位置と当該位置にて発生するセンサ値の誤差が少なくとも対応付けられたセンサ値対応環境データベースを利用する、
ことを特徴とする請求項1または請求項2に記載の測位装置。
【請求項4】
前記信頼度付きセンサ値に基づいて前記センサ値対応環境データベースを更新するセンサ値対応環境データベース更新手段をさらに備える、
ことを特徴とする請求項3に記載の測位装置。
【請求項5】
データベースサーバに記憶されている前記センサ値対応環境データベースをネットワーク経由で受信する受信手段と、
受信した前記センサ値対応環境データベースを記憶する環境データベース記憶手段をさらに備える、
ことを特徴とする請求項3または請求項4に記載の測位装置。
【請求項6】
前記測位結果信頼度評価手段は、
前記測位結果の信頼度の評価にあたり、位置と当該位置にて発生する測位結果の誤差が少なくとも対応付けられた測位結果対応環境データベースを利用する、
ことを特徴とする請求項1乃至請求項5のいずれかに記載の測位装置。
【請求項7】
前記信頼度付き測位結果に基づいて前記測位結果対応環境データベースを更新する測位結果対応環境データベース更新手段をさらに備える、
ことを特徴とする請求項6に記載の測位装置。
【請求項8】
データベースサーバに記憶されている前記測位結果対応環境データベースをネットワーク経由で受信する受信手段と、
受信した前記測位結果対応環境データベースを記憶する環境データベース記憶手段をさらに備える、
ことを特徴とする請求項6または請求項7に記載の測位装置。
【請求項9】
測位装置と、当該測位装置とネットワーク経由で通信するデータベースサーバを備え、
前記測位装置は、
位置と当該位置にて発生するセンサ値の誤差が少なくとも対応付けられたセンサ値対応環境データベース、および、位置と当該位置にて発生する測位結果の誤差が少なくとも対応付けられた測位結果対応環境データベースを前記データベースサーバから受信する受信手段と、
それぞれが異なる対象を計測してセンサ値を出力する複数のセンサと、
前記複数のセンサから出力されるセンサ値ごとに、他の所定のセンサ値と前記センサ値対応環境データベースを利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手段と、
前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手段と、
前記複数の測位処理手段から出力される測位結果ごとに、他の所定の測位結果と前記測位結果対応環境データベースを利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手段と、
前記測位結果信頼度評価手段から出力される信頼度付き測位結果を統合して統合測位結果を出力する測位結果統合手段とを備え、
前記データベースサーバは、
前記センサ値対応環境データベースと前記測位結果対応環境データベースとを記憶する環境データベース記憶手段と、
前記前記センサ値対応環境データベースと前記測位結果対応環境データベースを、前記測位装置に送信する送信手段とを備える、
ことを特徴とする測位システム。
【請求項10】
所定の計測経路を前記複数のセンサにより予め計測して取得したセンサ値である現地計測センサ値と、前記計測経路において周囲環境の影響を排除した場合に計測されるべきセンサ値の情報を有するセンサ値対応正解データと、前記計測地点における環境についての情報が示される環境情報とを利用して前記センサ値対応環境データベースを構築するセンサ値対応環境データベース構築手段をさらに備える、
ことを特徴とする請求項9に記載の測位システム。
【請求項11】
前記センサ値対応環境データベースは、
所定の計測経路を前記複数のセンサにより予め計測して取得したセンサ値を利用して前記複数の測位処理手段が測位を行って出力した測位結果と、前記計測経路における正しい位置の情報を有する測位結果対応正解データと、前記計測地点における環境についての情報が示される環境情報とを利用して前記測位結果対応環境データベースを構築する測位結果対応環境データベース構築手段をさらに備える、
ことを特徴とする請求項9または請求項10に記載の測位システム。
【請求項12】
外部環境における所定の位置ごとに配置されており、この配置された位置情報を少なくとも含むタグ情報送信するアクティブタグをさらに備え、
前記複数のセンサにおける少なくとも1つのセンサは、通信可能範囲に位置している前記アクティブタグから前記タグ情報を受信して、前記センサ値の1つとして出力するようにされているとともに、
前記センサ値対応環境データベースと前記測位結果対応環境データベースの少なくともいずれか一方と、前記センサ値または前記測位結果として要求される精度を示す要求精度情報を利用して、前記精度が一定以下とされる地点を特定し、当該特定された地点に基づいて前記アクティブタグを配置する位置を決定する補正地点決定手段をさらに備える、
ことを特徴とする請求項10または請求項11に記載の測位システム。
【請求項13】
それぞれが異なる対象を計測してセンサ値を出力する複数のセンサから出力されるセンサ値ごとに他の所定のセンサ値を利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手順と、
前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手順と、
前記複数の測位処理手順から出力される測位結果ごとに他の所定の測位結果を利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手順と、
を備えることを特徴とする測位方法。
【請求項14】
測位装置と、当該測位装置とネットワーク経由で通信するデータベースサーバを備える測位システムにおける測位方法であって、
前記測位装置において、
位置と当該位置にて発生するセンサ値の誤差が少なくとも対応付けられたセンサ値対応環境データベース、および、位置と当該位置にて発生する測位結果の誤差が少なくとも対応付けられた測位結果対応環境データベースを前記データベースサーバから受信する受信手順と、
それぞれが異なる対象を計測してセンサ値を出力する複数のセンサから出力されるセンサ値ごとに、他の所定のセンサ値と前記センサ値対応環境データベースを利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手順と、
前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手順と、
前記複数の測位処理手順から出力される測位結果ごとに、他の所定の測位結果と前記測位結果対応環境データベースを利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手順と、
前記測位結果信頼度評価手順から出力される信頼度付き測位結果を統合して統合測位結果を出力する測位結果統合手順とを備え、
前記データベースサーバにおいて、
環境データベース記憶部に記憶される前記センサ値対応環境データベースと前記測位結果対応環境データベースを前記測位装置に送信する送信手順とを備える、
ことを特徴とする測位方法。
【請求項15】
測位装置に、
それぞれが異なる対象を計測してセンサ値を出力する複数のセンサから出力されるセンサ値ごとに他の所定のセンサ値を利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手順と、
前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手順と、
前記複数の測位処理手順から出力される測位結果ごとに他の所定の測位結果を利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手順と、
を実行させるためのプログラム。
【請求項1】
それぞれが異なる対象を計測してセンサ値を出力する複数のセンサと、
前記複数のセンサから出力されるセンサ値ごとに他の所定のセンサ値を利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手段と、
前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手段と、
前記複数の測位処理手段から出力される測位結果ごとに他の所定の測位結果を利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手段と、
を備えることを特徴とする測位装置。
【請求項2】
前記測位結果信頼度評価手段から出力される信頼度付き測位結果を統合して統合測位結果を出力する測位結果統合手段をさらに備える、
ことを特徴とする請求項1に記載の測位装置。
【請求項3】
前記センサ値信頼度評価手段は、
前記センサ値の信頼度の評価にあたり、位置と当該位置にて発生するセンサ値の誤差が少なくとも対応付けられたセンサ値対応環境データベースを利用する、
ことを特徴とする請求項1または請求項2に記載の測位装置。
【請求項4】
前記信頼度付きセンサ値に基づいて前記センサ値対応環境データベースを更新するセンサ値対応環境データベース更新手段をさらに備える、
ことを特徴とする請求項3に記載の測位装置。
【請求項5】
データベースサーバに記憶されている前記センサ値対応環境データベースをネットワーク経由で受信する受信手段と、
受信した前記センサ値対応環境データベースを記憶する環境データベース記憶手段をさらに備える、
ことを特徴とする請求項3または請求項4に記載の測位装置。
【請求項6】
前記測位結果信頼度評価手段は、
前記測位結果の信頼度の評価にあたり、位置と当該位置にて発生する測位結果の誤差が少なくとも対応付けられた測位結果対応環境データベースを利用する、
ことを特徴とする請求項1乃至請求項5のいずれかに記載の測位装置。
【請求項7】
前記信頼度付き測位結果に基づいて前記測位結果対応環境データベースを更新する測位結果対応環境データベース更新手段をさらに備える、
ことを特徴とする請求項6に記載の測位装置。
【請求項8】
データベースサーバに記憶されている前記測位結果対応環境データベースをネットワーク経由で受信する受信手段と、
受信した前記測位結果対応環境データベースを記憶する環境データベース記憶手段をさらに備える、
ことを特徴とする請求項6または請求項7に記載の測位装置。
【請求項9】
測位装置と、当該測位装置とネットワーク経由で通信するデータベースサーバを備え、
前記測位装置は、
位置と当該位置にて発生するセンサ値の誤差が少なくとも対応付けられたセンサ値対応環境データベース、および、位置と当該位置にて発生する測位結果の誤差が少なくとも対応付けられた測位結果対応環境データベースを前記データベースサーバから受信する受信手段と、
それぞれが異なる対象を計測してセンサ値を出力する複数のセンサと、
前記複数のセンサから出力されるセンサ値ごとに、他の所定のセンサ値と前記センサ値対応環境データベースを利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手段と、
前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手段と、
前記複数の測位処理手段から出力される測位結果ごとに、他の所定の測位結果と前記測位結果対応環境データベースを利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手段と、
前記測位結果信頼度評価手段から出力される信頼度付き測位結果を統合して統合測位結果を出力する測位結果統合手段とを備え、
前記データベースサーバは、
前記センサ値対応環境データベースと前記測位結果対応環境データベースとを記憶する環境データベース記憶手段と、
前記前記センサ値対応環境データベースと前記測位結果対応環境データベースを、前記測位装置に送信する送信手段とを備える、
ことを特徴とする測位システム。
【請求項10】
所定の計測経路を前記複数のセンサにより予め計測して取得したセンサ値である現地計測センサ値と、前記計測経路において周囲環境の影響を排除した場合に計測されるべきセンサ値の情報を有するセンサ値対応正解データと、前記計測地点における環境についての情報が示される環境情報とを利用して前記センサ値対応環境データベースを構築するセンサ値対応環境データベース構築手段をさらに備える、
ことを特徴とする請求項9に記載の測位システム。
【請求項11】
前記センサ値対応環境データベースは、
所定の計測経路を前記複数のセンサにより予め計測して取得したセンサ値を利用して前記複数の測位処理手段が測位を行って出力した測位結果と、前記計測経路における正しい位置の情報を有する測位結果対応正解データと、前記計測地点における環境についての情報が示される環境情報とを利用して前記測位結果対応環境データベースを構築する測位結果対応環境データベース構築手段をさらに備える、
ことを特徴とする請求項9または請求項10に記載の測位システム。
【請求項12】
外部環境における所定の位置ごとに配置されており、この配置された位置情報を少なくとも含むタグ情報送信するアクティブタグをさらに備え、
前記複数のセンサにおける少なくとも1つのセンサは、通信可能範囲に位置している前記アクティブタグから前記タグ情報を受信して、前記センサ値の1つとして出力するようにされているとともに、
前記センサ値対応環境データベースと前記測位結果対応環境データベースの少なくともいずれか一方と、前記センサ値または前記測位結果として要求される精度を示す要求精度情報を利用して、前記精度が一定以下とされる地点を特定し、当該特定された地点に基づいて前記アクティブタグを配置する位置を決定する補正地点決定手段をさらに備える、
ことを特徴とする請求項10または請求項11に記載の測位システム。
【請求項13】
それぞれが異なる対象を計測してセンサ値を出力する複数のセンサから出力されるセンサ値ごとに他の所定のセンサ値を利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手順と、
前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手順と、
前記複数の測位処理手順から出力される測位結果ごとに他の所定の測位結果を利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手順と、
を備えることを特徴とする測位方法。
【請求項14】
測位装置と、当該測位装置とネットワーク経由で通信するデータベースサーバを備える測位システムにおける測位方法であって、
前記測位装置において、
位置と当該位置にて発生するセンサ値の誤差が少なくとも対応付けられたセンサ値対応環境データベース、および、位置と当該位置にて発生する測位結果の誤差が少なくとも対応付けられた測位結果対応環境データベースを前記データベースサーバから受信する受信手順と、
それぞれが異なる対象を計測してセンサ値を出力する複数のセンサから出力されるセンサ値ごとに、他の所定のセンサ値と前記センサ値対応環境データベースを利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手順と、
前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手順と、
前記複数の測位処理手順から出力される測位結果ごとに、他の所定の測位結果と前記測位結果対応環境データベースを利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手順と、
前記測位結果信頼度評価手順から出力される信頼度付き測位結果を統合して統合測位結果を出力する測位結果統合手順とを備え、
前記データベースサーバにおいて、
環境データベース記憶部に記憶される前記センサ値対応環境データベースと前記測位結果対応環境データベースを前記測位装置に送信する送信手順とを備える、
ことを特徴とする測位方法。
【請求項15】
測位装置に、
それぞれが異なる対象を計測してセンサ値を出力する複数のセンサから出力されるセンサ値ごとに他の所定のセンサ値を利用して信頼度を評価し、信頼度付きセンサ値を出力するセンサ値信頼度評価手順と、
前記信頼度付きセンサ値のうち所定の1以上の信頼度付きセンサ値を利用して測位処理を行うもので、それぞれが異なるアルゴリズムによる測位処理を行って測位結果を出力する複数の測位処理手順と、
前記複数の測位処理手順から出力される測位結果ごとに他の所定の測位結果を利用して信頼度を評価し、信頼度付き測位結果を出力する測位結果信頼度評価手順と、
を実行させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−208010(P2012−208010A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−73793(P2011−73793)
【出願日】平成23年3月30日(2011.3.30)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度、総務省、「高精度位置認識技術の研究開発」委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(397065136)株式会社横須賀テレコムリサーチパーク (28)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月30日(2011.3.30)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成22年度、総務省、「高精度位置認識技術の研究開発」委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(397065136)株式会社横須賀テレコムリサーチパーク (28)
【Fターム(参考)】
[ Back to top ]