
測位装置、測位方法およびプログラム
【課題】 絶対位置データが得られないまま自律航法の測位が行われ、その後に、絶対位置データが取得された場合でも、始端からの一連の位置データを正確に求められる測位装置、測位方法およびプログラムを提供する。
【解決手段】 絶対位置が不明な状態で自律航法の測位手段により一連の相対変位データ(La0)が取得され、この取得後に測位衛星により複数地点の絶対位置データ(B1,C2)が取得された場合に、一連の相対変位データ(La0)を、その後に取得された絶対位置データ(B1)に基づき、絶対位置にそれぞれ対応づけて一連の位置データ(La1)に変換するとともに、絶対位置データ(B1,C2)が取得された複数地点間の一連の位置データ(Lb1)に対して行った補正と同一のパラメータを用いて、絶対位置が不明な状態で取得された一連の位置データ(La1)を補正する。
【解決手段】 絶対位置が不明な状態で自律航法の測位手段により一連の相対変位データ(La0)が取得され、この取得後に測位衛星により複数地点の絶対位置データ(B1,C2)が取得された場合に、一連の相対変位データ(La0)を、その後に取得された絶対位置データ(B1)に基づき、絶対位置にそれぞれ対応づけて一連の位置データ(La1)に変換するとともに、絶対位置データ(B1,C2)が取得された複数地点間の一連の位置データ(Lb1)に対して行った補正と同一のパラメータを用いて、絶対位置が不明な状態で取得された一連の位置データ(La1)を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、移動経路に沿った一連の位置データを取得していく測位装置、測位方法およびプログラムに関する。
【背景技術】
【0002】
以前より、自律航法用のセンサを利用して移動方向と移動量とを連続的に計測するとともに、計測された移動ベクトルを始端地点の絶対位置データに積算していくことで、移動経路に沿った一連の位置データを取得していく自律航法による測位装置が知られている。
【0003】
また、従来、測位衛星を利用した測位によって自律航法の測位で得られた位置データを補正する技術や、測位衛星を利用した測位によって自律航法用のセンサの校正処理を行う技術が提案されている(特許文献1,2を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−232771号公報
【特許文献2】特開平11−230772号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
自律航法用のセンサは相対的な変位を計測できるだけである。したがって、自律航法の測位を行う場合には、通常、始端地点の絶対位置データを別の手段によって取得する必要がある。
【0006】
そのため、例えばビル内で測位を開始する場合など、始端地点の絶対位置データが得られない場合には、なんら工夫がないと、例えばビル外など絶対位置データが得られる場所に移動するまで、移動経路に沿った位置データを取得できないという課題がある。
【0007】
また、自律航法の測位では、位置データの誤差が時間の経過に伴って累積されていくという性質がある。従って、過去の位置データを記録していくデータロガー装置などにおいては、精度の高い絶対位置データが得られた場合に、この絶対位置データに基づき過去の自律航法の測位によって得られている一連の位置データを補正することで、誤差の少ない位置データの記録ができると考えられる。
【0008】
過去の一連の位置データを正確に補正するには、例えば、一連の位置データの始端と終端を含む複数の地点における比較的に高精度な絶対位置データが必要になると考えられる。
【0009】
そのため、例えばビル内で始端地点の絶対位置データがないまま自律航法の測位を連続的に実行し、ビル外へ出てから測位衛星を利用した測位により絶対位置データが得られた場合には、なんら工夫がないと、ビル内の測位データに対して同様の補正を行うことができないという課題がある。
【0010】
この発明の目的は、始端地点の絶対位置データが得られないまま、自律航法の測位が連続的に行われ、その後に、絶対位置データが得られるようになった場合でも、始端地点からの一連の位置データを求めることができ、さらに、この始端地点からの一連の位置データについても正確な位置データに補正することのできる測位装置、測位方法およびプログラムを提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するため、請求項1記載の発明は、
測位衛星の信号を受信して絶対位置の測定を行う第1測位手段と、
動きと方位の検出に基づいて相対変位の測定を行う第2測位手段と、
前記第2測位手段の測定を連続的に行わせるとともに前記第1測位手段の測定を間欠的に行わせて移動経路に沿った一連の位置データを取得していく軌跡データ取得手段と、
前記第1測位手段の測定により取得された複数地点の絶対位置データに基づき前記軌跡データ取得手段により取得された一連の位置データを部分ごとに補正していく軌跡データ補正手段と、
を備え、
絶対位置が不明な状態で前記第2測位手段の連続的な測位により一連の相対変位データが取得され、この取得後に前記第1測位手段の測定により複数地点の絶対位置データが取得された場合に、
前記軌跡データ取得手段は、前記一連の相対変位データを、その後に取得された絶対位置データに基づき、絶対位置にそれぞれ対応づけて一連の位置データに変換し、
前記軌跡データ補正手段は、絶対位置データが取得された前記複数地点間の一連の位置データに対して行った補正と同一のパラメータを用いて、絶対位置データが取得された前記複数地点より前の一連の位置データを補正することを特徴とする測位装置である。
【0012】
請求項2記載の発明は、請求項1記載の測位装置であって、
前記軌跡データ補正手段は、
絶対位置データが取得された前記複数地点間の一連の位置データに対して、この一連の位置データに対応する軌跡を前記複数地点の絶対位置データに合うように一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第1補正手段と、
絶対位置データが取得される前記複数地点より前の一連の位置データに対して、この一連の位置データに対応する軌跡を、前記第1補正手段による前記相似変形処理の伸縮率および回転角度と同一のパラメータを用いて、一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第2補正手段と、
を有することを特徴としている。
【0013】
請求項3記載の発明は、請求項2記載の測位装置であって、
前記第1補正手段は、
前記複数地点が3つ以上の地点である場合に、前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データとの夫々の差が小さくなるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴としている。
【0014】
請求項4記載の発明は、請求項3記載の測位装置であって、
前記第1補正手段は、
前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データと、の二乗誤差の総和が最小になるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴としている。
【0015】
請求項5記載の発明は、
測位衛星の信号を受信して絶対位置の測定を行う第1測位ステップと、
動きと方位の検出に基づいて相対変位の測定を行う第2測位ステップと、
前記第2測位ステップの測定を連続的に行わせるとともに前記第1測位ステップの測定を間欠的に行わせて移動経路に沿った一連の位置データを取得していく軌跡データ取得工程と、
前記第1測位ステップの測定により取得された複数地点の絶対位置データに基づき前記軌跡データ取得工程により取得された一連の位置データを部分ごとに補正していく軌跡データ補正工程と、
を備え、
絶対位置が不明な状態で前記第2測位ステップの連続的な測位により一連の相対変位データが取得され、この取得後に前記第1測位ステップの測定により複数地点の絶対位置データが取得された場合に、
前記軌跡データ取得工程は、前記一連の相対変位データを、その後に取得された絶対位置データに基づき、絶対位置にそれぞれ対応づけて一連の位置データに変換し、
前記軌跡データ補正工程は、絶対位置データが取得された前記複数地点間の一連の位置データに対して行った補正と同一のパラメータを用いて、絶対位置データが取得された前記複数地点より前の一連の位置データを補正することを特徴とする測位方法である。
【0016】
請求項6記載の発明は、請求項5記載の測位方法であって、
前記軌跡データ補正工程は、
絶対位置データが取得された前記複数地点間の一連の位置データに対して、この一連の位置データに対応する軌跡を前記複数地点の絶対位置データに合うように一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第1補正工程と、
絶対位置データが取得される前記複数地点より前の一連の位置データに対して、この一連の位置データに対応する軌跡を、前記第1補正工程による前記相似変形処理の伸縮率および回転角度と同一のパラメータを用いて、一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第2補正工程と、
を有することを特徴としている。
【0017】
請求項7記載の発明は、請求項6記載の測位方法であって、
前記第1補正工程は、
前記複数地点が3つ以上の地点である場合に、前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データとの夫々の差が小さくなるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴としている。
【0018】
請求項8記載の発明は、請求項7記載の測位方法であって、
前記第1補正工程は、
前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データと、の二乗誤差の総和が最小になるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴としている。
【0019】
請求項9記載の発明は、
測位衛星の信号を受信して絶対位置の測定を行う第1測位手段と、動きと方位の検出に基づいて相対変位の測定を行う第2測位手段とを制御するコンピュータに、
前記第2測位手段の測定を連続的に行わせるとともに前記第1測位手段の測定を間欠的に行わせて移動経路に沿った一連の位置データを取得していく軌跡データ取得機能と、
前記第1測位手段の測定により取得された複数地点の絶対位置データに基づき前記軌跡データ取得機能により取得された一連の位置データを部分ごとに補正していく軌跡データ補正機能と、
を実現させ、
絶対位置が不明な状態で前記第2測位手段の連続的な測位により一連の相対変位データが取得され、この取得後に前記第1測位手段の測定により複数地点の絶対位置データが取得された場合に、
前記軌跡データ取得機能は、前記一連の相対変位データを、その後に取得された絶対位置データに基づき、絶対位置にそれぞれ対応づけて一連の位置データに変換し、
前記軌跡データ補正機能は、絶対位置データが取得された前記複数地点間の一連の位置データに対して行った補正と同一のパラメータを用いて、絶対位置データが取得された前記複数地点より前の一連の位置データを補正することを特徴とするプログラムである。
【0020】
請求項10記載の発明は、請求項9記載のプログラムであって、
前記軌跡データ補正機能は、
絶対位置データが取得された前記複数地点間の一連の位置データに対して、この一連の位置データに対応する軌跡を前記複数地点の絶対位置データに合うように一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第1補正機能と、
絶対位置データが取得される前記複数地点より前の一連の位置データに対して、この一連の位置データに対応する軌跡を、前記第1補正機能による前記相似変形処理の伸縮率および回転角度と同一のパラメータを用いて、一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第2補正機能と、
を有することを特徴としている。
【0021】
請求項11記載の発明は、請求項10記載のプログラムであって、
前記第1補正機能は、
前記複数地点が3つ以上の地点である場合に、前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データとの夫々の差が小さくなるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴としている。
【0022】
請求項12記載の発明は、請求項11記載のプログラムであって、
前記第1補正機能は、
前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データと、の二乗誤差の総和が最小になるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴としている。
【発明の効果】
【0023】
本発明に従うと、絶対位置が不明な状態で取得された一連の相対変位データを、その後に絶対位置に対応づけて一連の位置データを生成するとともに、この一連の位置データを絶対位置データが取得された複数地点間の補正処理と同様に補正して、より正確な一連の位置データとすることができる。
【図面の簡単な説明】
【0024】
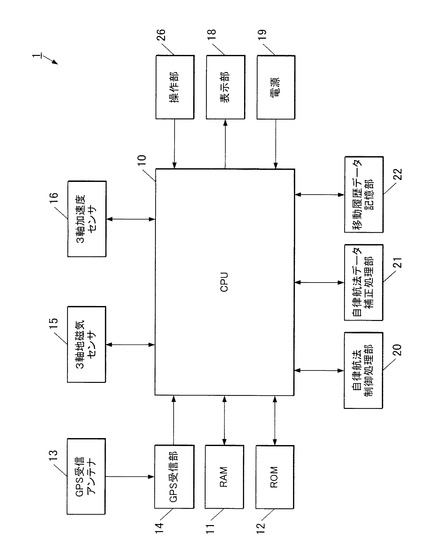
【図1】本発明の実施形態の測位装置の全体構成を示すブロック図である。
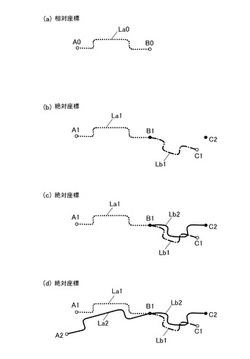
【図2】測位装置の動作の一例を説明するもので、(a)〜(d)はその第1段階から第4段階で取得された移動軌跡データを表わした軌跡の図である。
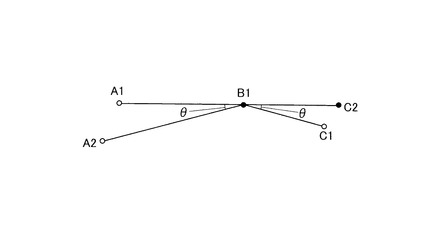
【図3】相似変形処理の伸縮率と回転角度を説明する図である。
【図4】CPUにより実行される測位制御処理の制御手順を示すフローチャートである。
【図5】図4のステップS17で実行される移動履歴データ補正処理の詳細な手順を示すフローチャートである。
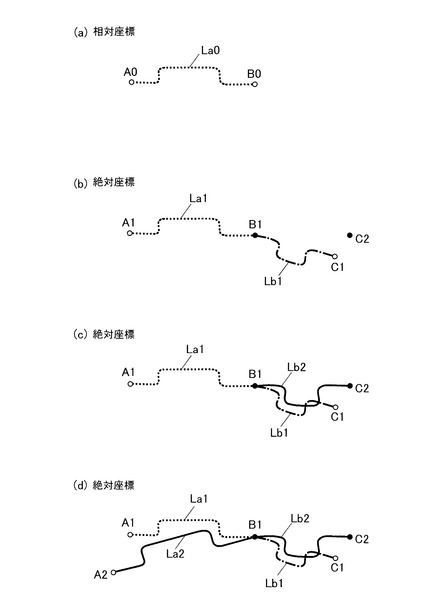
【図6】移動履歴データの補正処理の変形例を説明するもので、(a)は補正前の移動軌跡データの軌跡、(b)はGPSの測位により取得された絶対位置データとその軌跡、(c)は補正後の移動軌跡データの軌跡、(d)は(c)の一部分を拡大した図である。
【発明を実施するための形態】
【0025】
以下、本発明の実施の形態を図面に基づいて説明する。
【0026】
図1は、本発明の実施形態の測位装置の全体構成を示すブロック図である。
【0027】
この実施形態の測位装置1は、移動中に位置の測定を行って移動経路上の各地点の位置データを含む移動軌跡データを記録していく装置である。この測位装置1は、図1に示すように、装置の全体的な制御を行うCPU(中央演算処理装置)10と、CPU10に作業用のメモリ空間を提供するRAM11と、CPU10が実行する制御プログラムや制御データを格納したROM12と、GPS(全地球測位システム)衛星からの信号を受信するためのGPS受信アンテナ13およびGPS受信部14と、自律航法用センサである3軸地磁気センサ15および3軸加速度センサ16と、各種の情報表示や画像表示を行う表示部18と、各部に動作電圧を供給する電源19と、外部から操作指令を入力する操作部26と、自律航法用センサ(15,16)の計測データに基づいて自律航法の測位演算を行う自律航法制御処理部20と、自律航法制御処理部20により取得された移動軌跡データの補正演算を行う自律航法データ補正処理部21と、移動軌跡データが蓄積されていく移動履歴データ記憶部22等を備えている。
【0028】
GPS受信部14は、CPU10からの動作指令に基づき、GPS受信アンテナ13を介してGPS衛星の送信電波を捕捉してその復調処理を行う。CPU10は、このGPS衛星の送信データと送信信号に基づいて所定の測位演算を行うことで、現在位置を表わす絶対位置データを算出することができる。これらGPS受信アンテナ13、GPS受信部14およびCPU10の測位演算機能により、第1測位手段が構成される。
【0029】
3軸地磁気センサ15は、地磁気の方向を検出するセンサであり、3軸加速度センサ16は3軸方向の加速度をそれぞれ検出するセンサである。
【0030】
自律航法制御処理部20は、CPU10を補助する演算装置であり、所定のサンプリング周期で3軸地磁気センサ15と3軸加速度センサ16の計測データを、CPU10を介して入力し、これらの計測データから測位装置1の移動方向と移動量とを算出していく。さらに、CPU10から供給される直前の位置データに、上記算出された移動方向および移動量からなるベクトルデータを加算することで、自律航法の測位結果である位置データを算出してCPU10に送る。これらの3軸地磁気センサ15、3軸加速度センサ16、および自律航法制御処理部20により、第2測位手段が構成される。
【0031】
特に制限されるものではないが、本実施形態の測位装置の自律航法用のセンサ(15,16)と自律航法制御処理部20とは、歩行体についての自律航法の測位を可能とするものである。具体的には、自律航法制御処理部20は、3軸加速度センサ16の出力に現れる鉛直方向の大きな振動から歩数を計数し、予め設定されている歩幅データと乗算することで移動量を計測する。また、自律航法制御処理部20は、3軸加速度センサ16の出力に現れる歩行体の前後方向の大きな加速度変化と、左右方向の小さな加速度変化とを解析して、歩行体が3軸加速度センサ16の何れの向きに移動しているのかを計測する。さらに、3軸地磁気センサ15による地磁気の検出と、3軸加速度センサ16による重力方向の検出とから、各方位の向きを確定して、先に計測された移動方向を方位により求める。
【0032】
このような自律航法の測位によれば、例えば歩幅データに一定の誤差が含まれていたり、3軸地磁気センサ15の出力に一定のオフセット誤差が含まれていたりする場合に、自律航法の測位結果には、移動量と移動方向に関して一律の誤差がそれぞれ含まれることになる。
【0033】
自律航法データ補正処理部21は、CPU10を補助する演算装置であり、自律航法制御処理部20によって取得されて移動履歴データ記憶部22に記憶される移動軌跡データを、間欠的なGPS測位によって取得される絶対位置データに基づき、より正確な移動軌跡データに修正する補正演算を行うものである。また、移動履歴データ記憶部22に記憶された移動軌跡データが絶対座標に対応づけられていない相対座標の位置データを含む場合に、間欠的なGPS測位によって取得される絶対位置データに基づき、相対座標の移動軌跡データを絶対座標にそれぞれ対応づける補正演算も行うようになっている。これらの補正演算の詳細な説明は後述する。
【0034】
移動履歴データ記憶部22は、例えば不揮発性メモリなどにより構成され、自律航法制御処理部20によって取得された位置データが時系列に登録される移動軌跡データや、自律航法データ補正処理部21により補正された移動軌跡データが記憶されるようになっている。移動軌跡データは、絶対位置や相対位置を表わす一連の位置データのほかに、例えば、その取得順を表わす連番データ、各位置データの測位時刻のデータ、位置データが絶対座標のものか相対座標のものかを示す相対座標フラグ、位置データが未補正か補正済みかを示す補正フラグ等を含んだデータとなっている。
【0035】
ROM12には、自律航法による連続的な測位とGPSを利用した間欠的な測位とを併用して移動経路を表わす移動軌跡データを取得していく測位制御処理のプログラムが格納されている。また、ROM12には、自律航法データ補正処理部21により実行される移動履歴データ補正処理のプログラムが格納されている。CPU10とこの測位制御処理のプログラムにより主に軌跡データ取得手段が構成され、自律航法データ補正処理部21とそのプログラムにより主に軌跡データ補正手段が構成される。また、CPU10および自律航法データ補正処理部21によりプログラムを実行するコンピュータが構成される。上記のプログラムは、ROM12に格納するほか、例えば、データ読取装置を介してCPU10が読み取り可能な、例えば、光ディスク等の可搬型記憶媒体、フラッシュメモリ等の不揮発性メモリに格納しておくことが可能である。また、このようなプログラムを、キャリアウェーブ(搬送波)を媒体として通信回線を介して測位装置1にダウンロードされる形態を適用することもできる。
【0036】
[動作の概要]
次に、上記構成の測位装置1により実行される測位制御処理について説明する。
【0037】
ここでは、GPS衛星の電波が届かない場所で測位装置1を作動して、この測位装置1を携帯したユーザが移動した後に、GPSの電波が届く場所に出た場合の測位制御処理について説明する。
【0038】
図2には、上記場合の測位制御処理の流れを説明する図を示す。同図(a)〜(d)にはその第1段階から第4段階に取得された移動軌跡データの軌跡を示している。
【0039】
図2(a)に示すように、測位制御処理が開始されてGPSの測位ができない場合には、測位装置1では、絶対位置が不明なまま自律航法による測位を連続的に行って、相対座標による移動軌跡データを取得していく。この相対座標の移動軌跡データは、例えば、その開始位置A0に仮想的な位置データ(例えば緯度90度、経度0度など)を与えて、自律航法の測位により計測された相対変位データを開始地点A0の位置データに積算して得られるものであり、一連の相対変位データと等価なものである。この相対座標の移動軌跡データを時系列に結んだものが、図2(a)の軌跡La0である。
【0040】
次に、測位装置1がGPS衛星の電波の届く場所に出てきた場合、図2(b)に示すように、その直後、あるいは所定の間欠時間を開けた地点B1において、GPSによる測位が実行されて絶対位置データが取得される。GPS衛星の電波の届く場所に出てきた後も、自律航法による測位は継続的に実行される。
【0041】
GPSの測位で地点B1の絶対位置データが取得されたら、それより前に取得された相対座標の移動軌跡データ(軌跡La0)を、例えば終端側から始端側へさかのぼるように絶対位置に対応づけていくことで、絶対座標で表わされた移動軌跡データ(軌跡La1)を算出する。詳細には、相対座標の移動軌跡データ(軌跡La0)の終端B0の位置データと、GPS測位で取得した同一地点B1の絶対位置データとの差を算出し、この差を相対座標の移動軌跡データ(軌跡La0)にそれぞれ加算することで、絶対座標で表わされた移動軌跡データ(軌跡La1)を取得する。
【0042】
なお、この相対座標から絶対座標への変換処理は、地点B1で絶対位置データが取得されたタイミングに行うこともできるが、それ以外のタイミングに行うようにしても良い。この実施形態の測位装置1では、図2(c)のGPSの測位により間欠的に2つの地点B1,C2の絶対位置データが取得された時点で上記の変換処理が行なわれるようになっている。
【0043】
絶対位置データが取得された地点B1後の自律航法の測位では、この地点B1の絶対位置データに計測された相対変位データを積算していくことで、絶対位置に対応付けられた移動軌跡データが算出される。この移動軌跡データを時系列に結んだものが、図2(b)の軌跡Lb1である。
【0044】
次に、間欠的なGPSの受信タイミング(図2(b)では地点C1に来たタイミング)になるとGPSの測位を行う。この時点で自律航法の測位により得られた位置データが地点C1に対応し、GPSの測位により得られた位置データが地点C2に対応する。自律航法の測位では、移動に伴って誤差が累積されていくため、両者の位置データは一致せずに差異が生じている。
【0045】
本実施形態の測位装置1では、間欠的にGPSにより正確な測位が行なわれた場合に、この地点C2の正確な絶対位置データを用いて、先に取得されている移動軌跡データ(軌跡Lb1,La1)の補正処理が行われる。
【0046】
まず、図2(c)に示すように、この測位装置1では、複数回のGPSの測位が行われた地点間の移動軌跡データ(軌跡La1)の補正処理を行う。この補正処理は、補正前の移動軌跡データ(軌跡Lb1)が、GPSの測位により得られた複数地点B1,C1の位置データと合致するように、移動軌跡データに対応する軌跡Lb1を一様に伸縮および回転させる相似変形処理を行い、この相似変形処理後の軌跡Lb2に対応する一連の位置データを補正後の移動軌跡データとするものである。
【0047】
図3には、相似変形処理の伸縮率と回転角度を説明する図を示す。
【0048】
実際の補正演算では、上記のように軌跡の作成と軌跡を相似変形する処理を直接的に行うのではなく、次のような補正演算によって間接的に変形処理を行う。すなわち、まず、図3の地点B1,C1,C2の位置データから、線分B1−C1と線分B1−C2との伸縮率、回転角度θ(=ΔC1,B1,C2)とを算出する。そして、補正前の移動軌跡データ(軌跡Lb1)の各位置データに対して、地点B1からの距離を上記の伸縮率で伸縮させ、且つ、地点B1を中心に角度θで回転させた地点の位置データに変換する補正演算を行う。
【0049】
このような補正処理により、例えば、自律航法の測位で移動量の計測や移動方向の計測にそれぞれ一律の誤差が含まれているような場合に、この誤差を適切に除去して正確な移動軌跡データに補正することができる。
【0050】
続いて、この測位装置1では、図2(d)に示すように、GPSの測位前に取得された移動軌跡データ(軌跡La1)の補正処理を行う。この補正処理は、補正前の移動軌跡データに対応する軌跡La1を、先の補正処理で使用した相似変形の伸縮率および角度θを用いて、その終端地点B1を中心に一様に伸縮および回転させる相似変形処理を行い、この相似変形処理後の軌跡La2に対応する一連の位置データを補正後の移動軌跡データとするものである。
【0051】
この補正処理では、先の補正処理で使用した相似変形の伸縮率および角度θを用いているので、例えば、図3に示すように、補正前の移動軌跡データ(軌跡La1)の始端A1と、補正後の移動軌跡データ(軌跡La2)の始端A2とは、次のような関係となる。すなわち、線分B1−A1と線分B1−A2の伸縮率と、線分B1−C1と線分B1−C2の伸縮率が一致し、回転角度ΔA1,B1,A2と回転角度ΔC1,B1,C2とが一致する関係となる。
【0052】
このようなGPSの測位前に取得された移動軌跡データ(軌跡La1)に対する補正処理が行われることで、自律航法の測位で移動量や移動方向の計測結果にそれぞれ一律の誤差が含まれているような場合に、この誤差はGPSの測位前と測位後とで同様のものであるはずなので、この誤差を適切に除去して正確な移動軌跡データを得ることができる。
【0053】
その後、測位装置1を携帯したユーザが移動を継続した場合には、測位装置1において、地点B1からの移動の場合と同様の処理が繰り返し実行される。すなわち、間欠的なGPSの測位で得られた絶対位置データを基準として自律航法の測位が連続的に行われて移動軌跡データが取得される。そして、次の間欠的な時間が経過したら、再びGPSの測位を行って、この間の移動軌跡データを補正する。このような処理を繰り返し実行して、移動経路に沿った正確な移動軌跡データが記録されていく。
【0054】
[制御手順]
次に、上記の動作を実現する測位制御処理の制御手順について詳細に説明する。
【0055】
図4には、CPU10により実行される測位制御処理のフローチャートを示す。
【0056】
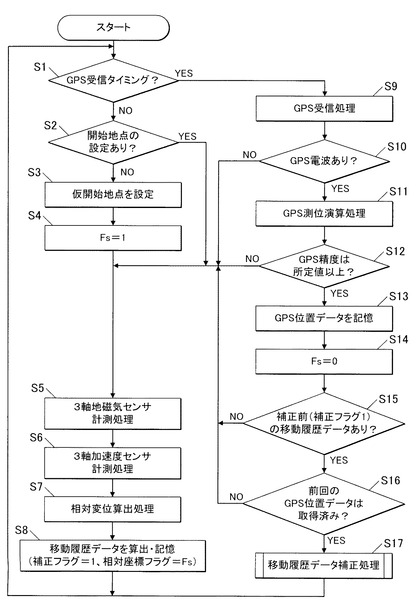
図4のフローチャートにおいて、ステップS1では、GPSの測位を間欠的に行うタイミングの判別が行われる。ステップS2〜S4では、自律航法の測位を開始する際に開始地点の絶対位置が不明である場合に、仮の開始地点の位置データを設定するとともに、続いて実行される自律航法の測位により得られる位置データが相対座標によるものであることを示すために、相対座標の使用を表わすフラグ変数“Fs”に値“1”をセットする処理が行われる。
【0057】
ステップS5〜S8では、1回分の自律航法の測位処理が行われる。すなわち、3軸地磁気センサ15と3軸加速度センサ16の計測データをサンプリングして(ステップS5,S6)、これらのサンプリングデータと直前の位置データとを自律航法制御処理部20に送り相対変位および現在の位置の算出を行わせる(ステップS7)。そして、自律航法制御処理部20から算出結果の位置データを受けて、この位置データに、連番データ、時刻データ、補正フラグ、相対座標フラグを付加して1地点分の移動履歴データとし、これを移動履歴データ記憶部22に書き込む(ステップS8)。ここで書き込まれる移動履歴データは、未補正のものなので補正フラグは“1”とし、相対座標フラグは変数Fsの値とする。
【0058】
つまり、GPSの測位を行う間欠的なタイミングでなければ、ステップS1,S5〜S8のループ処理が繰り返されることで、自律航法の測位が連続的に実行されて、移動履歴データ記憶部22に移動履歴データが蓄積されていく。また、測位制御処理の開始時に、GPSの測位が行われずに絶対位置が不明な場合には、ステップS3で仮の開始地点が設定されて、自律航法の測位が相対座標により連続的に実行されて、相対座標で位置データが表わされた移動履歴データが移動履歴データ記憶部22に記憶されていくようになっている。
【0059】
ステップS9〜S17では、GPSの測位とそれに伴った処理が実行される。すなわち、GPS受信部14を作動させて受信処理を行わせ(ステップS9)、GPS衛星からの送信電波の有無を判別して(ステップS10)、送信電波が無いと判別されれば、GPSの測位は中断してステップS5からの自律航法の測位処理へ分岐する。一方、送信電波があれば、受信信号に基づいてGPSの測位演算を行って絶対位置データを算出する(ステップS11)。
【0060】
続いて、受信信号からGPS測位の精度情報を取得して、この精度が所定値以上であるか判別する(ステップS12)。ここで、精度情報としては、例えば、DOP(Dilution of Precision)値、或いは、GST(GNSS Pseudorange Error Statistics)を適用することができる。この判別の結果、精度が所定値以上でなければ、GPSの測位結果は破棄して、ステップS5からの自律航法の測位処理へ分岐する。一方、所定値以上の精度があれば、測位結果の絶対位置データを例えばRAM11や移動履歴データ記憶部22へ記憶させ(ステップS13)、以降の自律航法の測位で絶対座標で位置データが求められるようになることから、相対座標の使用を表わす変数“Fs”に値“0”を代入する(ステップS14)。
【0061】
次いで、移動履歴データ記憶部22に補正前の移動履歴データ(すなわち、補正フラグが“1”のデータ)が有るか判別し(ステップS15)、これが有れば、前回のGPSの測位の絶対位置データが取得済みであるか判別する(ステップS16)。補正処理には、複数地点の絶対位置データが必要となるからである。そして、前回の絶対位置データも取得済みであれば、自律航法データ補正処理部21にコマンドを送って補正処理を実行させる(ステップS17)。そして、補正処理を実行させたら、ステップS1に戻る。一方、ステップS15,S16の何れかの判別処理の結果が“No”であれば、補正処理は実行せずに、ステップS5からの自律航法の測位処理へ分岐する。
【0062】
このようなステップS9〜S17の処理により、間欠的にGPSの測位が実行され、精度の高い絶対位置データが得られた場合に、この絶対位置データが基準地点の位置データとされて自律航法の測位がなされるようになっている。さらに、複数地点の精度の高い絶対位置データが得られたら、移動履歴データの補正処理が実行されるようになっている。
【0063】
図5には、図4のステップS17で実行される移動履歴データ補正処理の詳細なフローチャートを示す。
【0064】
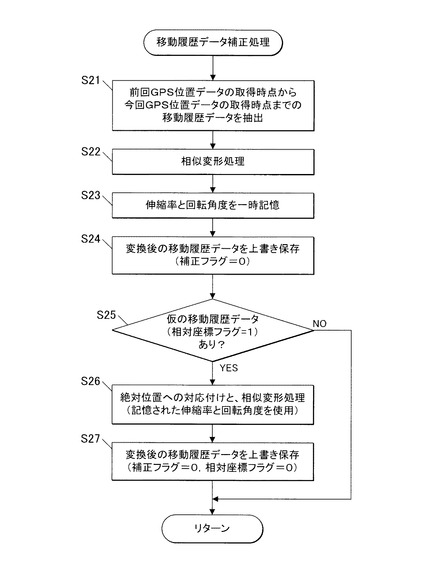
移動履歴データの補正処理が開始されると、自律航法データ補正処理部21は、まず、移動履歴データ記憶部22から、前回のGPS測位の絶対位置データの取得時点から今回のGPS測位の絶対位置データの取得時点までの移動履歴データを抽出する(ステップS21)。図2の例を参照すれば、図2(b)の地点B1の絶対位置データが前回のGPS測位のもの、地点C2の絶対位置データが今回のGPS測位のものであり、ここでは軌跡Lb1の移動履歴データが抽出される。
【0065】
次に、自律航法データ補正処理部21は、抽出した移動履歴データに対応する軌跡をGPS測位の絶対位置データに合わせるように相似変形させて補正する処理を行う(ステップS22:第1補正手段)。図2の例では、同図(c)の補正前の軌跡Lb1を補正後の軌跡Lb2に修正する処理に相当する。さらに、ここで、相似変形の伸縮率と回転角度をRAM11等へ一時記憶しておく(ステップS23)。
【0066】
そして、修正後の各地点の移動履歴データを移動履歴データ記憶部22へ上書き保存する(ステップS24)。このとき、位置データは補正済みになっているので補正フラグの値は“0”とする。
【0067】
次に、自律航法データ補正処理部21は、移動履歴データ記憶部22に、相対座標で表わされた仮の移動履歴データ、すなわち相対座標フラグの値が“1”のデータが有るか確認する(ステップS25)。その結果、これらのデータが無ければ、このまま移動履歴データ補正処理を終了するが、有れば、この相対座標で表わされた仮の移動履歴データを絶対位置に対応づける処理と、軌跡を相似変形させるような補正処理(第2補正手段)とを行う(ステップS26)。絶対位置に対応づける処理は、図2(a)→(b)の軌跡La0から軌跡La1へ変換する処理である。また、相似変形の補正処理は、図2(d)の軌跡La1を軌跡La2へ変換する処理である。この相似変形の補正処理では、ステップS23で一時記憶しておいた伸縮率と回転角度を用いた軌跡の相似変形により実行する。
【0068】
そして、仮の移動履歴データについても補正処理を行ったら、修正後の各地点の移動履歴データを移動履歴データ記憶部22へ上書き保存する(ステップS27)。このとき、位置データは補正済みになっているので補正フラグの値は“0”とし、位置データは絶対座標の値に変換済みになっているので相対座標フラグの値は“0”とする。移動履歴データを上書き保存したら、この移動履歴データ補正処理を終了する。
【0069】
このような移動履歴データ補正処理により、図2(a)〜(d)を参照して先に説明した補正処理が実現される。
【0070】
[変形例]
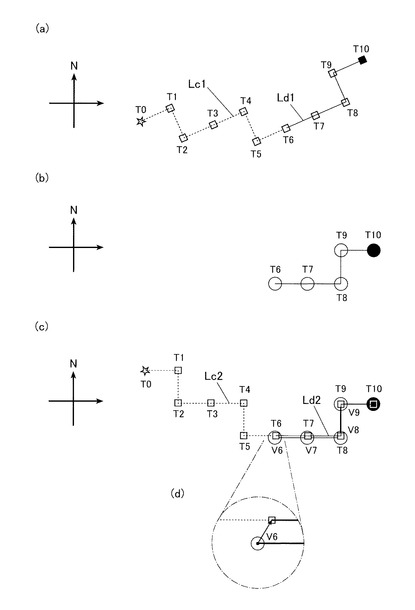
図6には、移動履歴データの補正処理の変形例の説明図を示す。同図(a)は補正前の移動軌跡データの軌跡、(b)はGPSの測位により取得された絶対位置データの軌跡、(c)は補正後の移動軌跡データの軌跡、(d)は(c)の一部分を拡大した図である。
【0071】
この補正処理は、GPSの測位により2地点より多い複数地点(タイミングT6〜T10の移動地点)の絶対位置データが取得された状況で、この複数地点間の移動履歴データの補正と、この複数地点以前に絶対位置が不明な状態で取得された移動履歴データの補正とを行うものである。
【0072】
図6(a)において、点線の軌跡Lc1が絶対位置が不明な状態で自律航法の測位により取得された移動履歴データの軌跡、実線の軌跡Ld1が絶対位置データを取得後に自律航法の測位により取得された移動履歴データの軌跡である。また、図6(b),(c)において、円記号(の中心点)がGPSの測位により取得された絶対位置である。図6の符号T0〜T10は測位が実行された各タイミングを示している。
【0073】
図6(a),(b)に示すように、測位装置1で自律航法により連続的に測位が行われる一方、タイミングT6〜T10の各移動地点でGPS測位により絶対位置データが取得された場合、まず、次のようにして複数地点間の移動履歴データ(軌跡Ld1)の補正を行う。
【0074】
すなわち、図6(c)の補正後の軌跡Ld2に示すように、軌跡Ld1の終端をGPSの絶対位置データに対応する地点に固定し、軌跡Ld1のタイミングT6〜T9の各位置データがGPSにより測位された絶対位置データに近くなるように、軌跡Ld1を一様に伸縮および回転させる相似変形処理を行う。
【0075】
この相似変形処理において、補正後の軌跡Ld2のタイミングT6〜T9の位置データ(図6(c)の四角記号の中心点に相当)と、GPS測位のタイミングT6〜T9の絶対位置データ(図6(c)の円記号の中心点に相当)とは、全てが合致するとは限らない。そこで、図6(d)にその一部の拡大図を示すように、これらの位置データと絶対位置データとの差異ベクトルV6〜V9が総合的に小さくなる伸縮率および回転角度を算出する。具体的には、差異ベクトルV6〜V9の二乗総和(すなわち、タイミングT6〜T9の位置データと絶対位置データとの二乗誤差の総和に相当)を最小にする伸縮率および回転角度を算出する。
【0076】
なお、この伸縮率と回転角度の演算負荷を軽くするために、例えば、伸縮率については、軌跡Ld2の両端をタイミングT6,T10の絶対位置データに合致させるなどの別の条件で求め、回転角度だけ上記差異ベクトルV6〜V9の二乗総和を最小にするという条件で求めるようにしても良い。また、これとは逆に、例えば、回転角度については、軌跡Ld2の両端をタイミングT6,T10の絶対位置データに合致させるなどの別の条件で求め、伸縮率だけ上記差異ベクトルV6〜V9の二乗総和を最小にするという条件で求めるようにしても良い。
【0077】
そして、上記のように算出した伸縮率および回転角度で相似変形した軌跡Ld2の各位置データが補正後のデータとなるように、複数地点間の移動履歴データ(軌跡Ld1)の補正演算を行う。
【0078】
次いで、自律航法データ補正処理部21は、絶対位置が不明な状態で取得された移動履歴データ(軌跡Lc1)についての補正処理を行う。この移動履歴データについては、初めにタイミングT6の絶対位置データに基づいて、さかのぼるように相対座標から絶対座標への変換を行って絶対座標で表わされた移動履歴データにしておく。そして、先の軌跡Ld1に対して行った相似変形と同一の伸縮率および回転角度を使用した相似変形処理を行った場合に、その相似変形処理後の軌跡Lc2の各位置データが補正後のデータとなるように、移動履歴データ(軌跡Lc1)の補正演算を行う。ここで、相似変形の回転中心は、先の軌跡Ld1に対して行った相似変形と同じくタイミングT10の地点とする。
【0079】
このような補正処理により、2地点より多い複数地点の絶対位置データがGPSの測位により求められている場合に、自律航法の測位により得られた複数地点間の移動履歴データ、および、それ以前に絶対位置が不明な状態で取得された移動履歴データを適宜補正することができる。
【0080】
なお、この変形例の補正処理は、例えば、GPSの測位によって精度の高い絶対位置データ(第1精度レンジの絶対位置データ)が得られる前に、精度が中程度の絶対位置データ(第2精度レンジの絶対位置データ)が複数地点で算出された場合に、これら精度が中程度の絶対位置データを複数利用して移動履歴データを適宜補正するのに適用することができる。
【0081】
また、上記の補正処理において、精度の高い絶対位置データが、例えば、図6のタイミングT8で取得されているような場合には、軌跡Ld1,Lc1の相似変形をタイミングT8の絶対位置を回転中心として行うようにしても良い。
【0082】
以上のように、この実施形態の測位装置1およびその測位方法によれば、絶対位置が不明な状態で自律航法の測位によって取得されている移動履歴データに対して、その後に複数地点で絶対位置データが取得された場合に、相対座標から絶対座標へ変換が行われ、且つ、この移動履歴データに対して複数地点の絶対位置データを利用した補正処理が行われるようになっている。したがって、絶対位置が不明な状態で自律航法の測位が連続的に行われた移動経路についても、正確な移動履歴データを記録していくことが可能となる。
【0083】
また、この実施形態の測位装置1およびその測位方法によれば、まず、絶対位置データが取得された複数地点間の移動履歴データに対して、その軌跡を絶対位置データに合うように相似変形させ、この相似変形後の軌跡が補正後のデータとなるように補正処理を行い、次いで、絶対位置が不明な状態で取得された移動履歴データに対しても、上記の相似変形と同一の伸縮率および回転角度で、軌跡を相似変形させ、この相似変形後の軌跡が補正後のデータとなるように補正処理を行う。したがって、自律航法の測位に一律の誤差が生じているような場合に、絶対位置が不明な状態で取得された移動履歴データに対しても、この誤差を適宜除去して正確な移動履歴データを得ることができる。
【0084】
また、この実施形態の測位装置1およびその測位方法によれば、移動履歴データを補正する際に、2地点より多い複数地点の絶対位置データがGPSの測位により取得されている場合に、移動履歴データの対応する地点のデータが絶対位置データに近くなるように、具体的には、それらの二乗誤差の総和が最小となるように、相似変形の伸縮率と回転角度の何れか又は両方が求められるようになっている。したがって、上記のような場合にも、適宜、移動履歴データを正確な値に補正することが可能となる。
【0085】
なお、本発明は、上記実施の形態に限られるものではなく、様々な変更が可能である。例えば、上記実施の形態では、絶対位置が不明な状態で自律航法の測位が行われた場合に、仮の開始地点の位置データを設定して、相対座標により移動履歴データを作成した例を示したが、相対座標を使用せずに、自律航法の測位で計測された一連の移動変位データを記録しておくようにしても良い。そして、次に、GPSの測位により絶対位置データが取得された場合に、さかのぼるようにこの一連の移動変位データを絶対位置に対応づけて絶対座標で表わされた一連の位置データに変換することができる。
【0086】
また、上記実施の形態では、移動履歴データの補正処理として、移動履歴データに対応する軌跡を、GPSの測位結果の絶対位置データに合うように、一様に伸縮および回転させる補正内容を採用した例を示したが、補正処理の内容は種々のものを適用可能である。例えば、移動距離に応じて進行方向を基準に一定の誤差が積算されていくような場合には、今回のGPSの測位地点で計測された誤差を、前回のGPSの測位地点からの移動経路に沿った移動距離で除算して単位移動距離当たりの誤差を補正パラメータとして求め、この誤差が前回のGPSの測位地点からの移動履歴データに移動距離に応じて付加されているものとして、この誤差を削除する内容の補正処理を採用することもできる。この場合、絶対位置が不明な状態で自律航法の測位により取得された移動履歴データについても、上記補正処理の補正パラメータを用いて同様に補正処理を行うことができる。
【0087】
また、上記実施形態では、第1測位手段の測位として、GPSによる測位を適用した例を示したが、別の測位衛星を利用した測位を同様に適用しても良い。また、第2測位手段の測位として、3軸地磁気センサと3軸加速度センサとを用いて歩行体の測位を行う例を示したが、例えば、車輪の回転検出とジャイロセンサの回転角の検出により車両の移動量と移動方向とを計測して測位を行うものを採用するなど、種々に変更が可能である。その他、実施形態で示した細部構成および細部方法は、発明の趣旨を逸脱しない範囲で適宜変更可能である。
【符号の説明】
【0088】
1 測位装置
10 CPU
11 RAM
12 ROM
13 GPS受信アンテナ
14 GPS受信部
15 3軸地磁気センサ
16 3軸加速度センサ
20 自律航法制御処理部
21 自律航法データ補正処理部
22 移動履歴データ記憶部
La0,La1,La2,Lb1,Lb2 軌跡
B1,C2 GPSの測位地点
Lc1,Lc2,Ld1,Ld2 軌跡
V6〜V9 差異ベクトル
【技術分野】
【0001】
この発明は、移動経路に沿った一連の位置データを取得していく測位装置、測位方法およびプログラムに関する。
【背景技術】
【0002】
以前より、自律航法用のセンサを利用して移動方向と移動量とを連続的に計測するとともに、計測された移動ベクトルを始端地点の絶対位置データに積算していくことで、移動経路に沿った一連の位置データを取得していく自律航法による測位装置が知られている。
【0003】
また、従来、測位衛星を利用した測位によって自律航法の測位で得られた位置データを補正する技術や、測位衛星を利用した測位によって自律航法用のセンサの校正処理を行う技術が提案されている(特許文献1,2を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−232771号公報
【特許文献2】特開平11−230772号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
自律航法用のセンサは相対的な変位を計測できるだけである。したがって、自律航法の測位を行う場合には、通常、始端地点の絶対位置データを別の手段によって取得する必要がある。
【0006】
そのため、例えばビル内で測位を開始する場合など、始端地点の絶対位置データが得られない場合には、なんら工夫がないと、例えばビル外など絶対位置データが得られる場所に移動するまで、移動経路に沿った位置データを取得できないという課題がある。
【0007】
また、自律航法の測位では、位置データの誤差が時間の経過に伴って累積されていくという性質がある。従って、過去の位置データを記録していくデータロガー装置などにおいては、精度の高い絶対位置データが得られた場合に、この絶対位置データに基づき過去の自律航法の測位によって得られている一連の位置データを補正することで、誤差の少ない位置データの記録ができると考えられる。
【0008】
過去の一連の位置データを正確に補正するには、例えば、一連の位置データの始端と終端を含む複数の地点における比較的に高精度な絶対位置データが必要になると考えられる。
【0009】
そのため、例えばビル内で始端地点の絶対位置データがないまま自律航法の測位を連続的に実行し、ビル外へ出てから測位衛星を利用した測位により絶対位置データが得られた場合には、なんら工夫がないと、ビル内の測位データに対して同様の補正を行うことができないという課題がある。
【0010】
この発明の目的は、始端地点の絶対位置データが得られないまま、自律航法の測位が連続的に行われ、その後に、絶対位置データが得られるようになった場合でも、始端地点からの一連の位置データを求めることができ、さらに、この始端地点からの一連の位置データについても正確な位置データに補正することのできる測位装置、測位方法およびプログラムを提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するため、請求項1記載の発明は、
測位衛星の信号を受信して絶対位置の測定を行う第1測位手段と、
動きと方位の検出に基づいて相対変位の測定を行う第2測位手段と、
前記第2測位手段の測定を連続的に行わせるとともに前記第1測位手段の測定を間欠的に行わせて移動経路に沿った一連の位置データを取得していく軌跡データ取得手段と、
前記第1測位手段の測定により取得された複数地点の絶対位置データに基づき前記軌跡データ取得手段により取得された一連の位置データを部分ごとに補正していく軌跡データ補正手段と、
を備え、
絶対位置が不明な状態で前記第2測位手段の連続的な測位により一連の相対変位データが取得され、この取得後に前記第1測位手段の測定により複数地点の絶対位置データが取得された場合に、
前記軌跡データ取得手段は、前記一連の相対変位データを、その後に取得された絶対位置データに基づき、絶対位置にそれぞれ対応づけて一連の位置データに変換し、
前記軌跡データ補正手段は、絶対位置データが取得された前記複数地点間の一連の位置データに対して行った補正と同一のパラメータを用いて、絶対位置データが取得された前記複数地点より前の一連の位置データを補正することを特徴とする測位装置である。
【0012】
請求項2記載の発明は、請求項1記載の測位装置であって、
前記軌跡データ補正手段は、
絶対位置データが取得された前記複数地点間の一連の位置データに対して、この一連の位置データに対応する軌跡を前記複数地点の絶対位置データに合うように一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第1補正手段と、
絶対位置データが取得される前記複数地点より前の一連の位置データに対して、この一連の位置データに対応する軌跡を、前記第1補正手段による前記相似変形処理の伸縮率および回転角度と同一のパラメータを用いて、一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第2補正手段と、
を有することを特徴としている。
【0013】
請求項3記載の発明は、請求項2記載の測位装置であって、
前記第1補正手段は、
前記複数地点が3つ以上の地点である場合に、前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データとの夫々の差が小さくなるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴としている。
【0014】
請求項4記載の発明は、請求項3記載の測位装置であって、
前記第1補正手段は、
前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データと、の二乗誤差の総和が最小になるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴としている。
【0015】
請求項5記載の発明は、
測位衛星の信号を受信して絶対位置の測定を行う第1測位ステップと、
動きと方位の検出に基づいて相対変位の測定を行う第2測位ステップと、
前記第2測位ステップの測定を連続的に行わせるとともに前記第1測位ステップの測定を間欠的に行わせて移動経路に沿った一連の位置データを取得していく軌跡データ取得工程と、
前記第1測位ステップの測定により取得された複数地点の絶対位置データに基づき前記軌跡データ取得工程により取得された一連の位置データを部分ごとに補正していく軌跡データ補正工程と、
を備え、
絶対位置が不明な状態で前記第2測位ステップの連続的な測位により一連の相対変位データが取得され、この取得後に前記第1測位ステップの測定により複数地点の絶対位置データが取得された場合に、
前記軌跡データ取得工程は、前記一連の相対変位データを、その後に取得された絶対位置データに基づき、絶対位置にそれぞれ対応づけて一連の位置データに変換し、
前記軌跡データ補正工程は、絶対位置データが取得された前記複数地点間の一連の位置データに対して行った補正と同一のパラメータを用いて、絶対位置データが取得された前記複数地点より前の一連の位置データを補正することを特徴とする測位方法である。
【0016】
請求項6記載の発明は、請求項5記載の測位方法であって、
前記軌跡データ補正工程は、
絶対位置データが取得された前記複数地点間の一連の位置データに対して、この一連の位置データに対応する軌跡を前記複数地点の絶対位置データに合うように一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第1補正工程と、
絶対位置データが取得される前記複数地点より前の一連の位置データに対して、この一連の位置データに対応する軌跡を、前記第1補正工程による前記相似変形処理の伸縮率および回転角度と同一のパラメータを用いて、一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第2補正工程と、
を有することを特徴としている。
【0017】
請求項7記載の発明は、請求項6記載の測位方法であって、
前記第1補正工程は、
前記複数地点が3つ以上の地点である場合に、前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データとの夫々の差が小さくなるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴としている。
【0018】
請求項8記載の発明は、請求項7記載の測位方法であって、
前記第1補正工程は、
前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データと、の二乗誤差の総和が最小になるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴としている。
【0019】
請求項9記載の発明は、
測位衛星の信号を受信して絶対位置の測定を行う第1測位手段と、動きと方位の検出に基づいて相対変位の測定を行う第2測位手段とを制御するコンピュータに、
前記第2測位手段の測定を連続的に行わせるとともに前記第1測位手段の測定を間欠的に行わせて移動経路に沿った一連の位置データを取得していく軌跡データ取得機能と、
前記第1測位手段の測定により取得された複数地点の絶対位置データに基づき前記軌跡データ取得機能により取得された一連の位置データを部分ごとに補正していく軌跡データ補正機能と、
を実現させ、
絶対位置が不明な状態で前記第2測位手段の連続的な測位により一連の相対変位データが取得され、この取得後に前記第1測位手段の測定により複数地点の絶対位置データが取得された場合に、
前記軌跡データ取得機能は、前記一連の相対変位データを、その後に取得された絶対位置データに基づき、絶対位置にそれぞれ対応づけて一連の位置データに変換し、
前記軌跡データ補正機能は、絶対位置データが取得された前記複数地点間の一連の位置データに対して行った補正と同一のパラメータを用いて、絶対位置データが取得された前記複数地点より前の一連の位置データを補正することを特徴とするプログラムである。
【0020】
請求項10記載の発明は、請求項9記載のプログラムであって、
前記軌跡データ補正機能は、
絶対位置データが取得された前記複数地点間の一連の位置データに対して、この一連の位置データに対応する軌跡を前記複数地点の絶対位置データに合うように一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第1補正機能と、
絶対位置データが取得される前記複数地点より前の一連の位置データに対して、この一連の位置データに対応する軌跡を、前記第1補正機能による前記相似変形処理の伸縮率および回転角度と同一のパラメータを用いて、一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第2補正機能と、
を有することを特徴としている。
【0021】
請求項11記載の発明は、請求項10記載のプログラムであって、
前記第1補正機能は、
前記複数地点が3つ以上の地点である場合に、前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データとの夫々の差が小さくなるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴としている。
【0022】
請求項12記載の発明は、請求項11記載のプログラムであって、
前記第1補正機能は、
前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データと、の二乗誤差の総和が最小になるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴としている。
【発明の効果】
【0023】
本発明に従うと、絶対位置が不明な状態で取得された一連の相対変位データを、その後に絶対位置に対応づけて一連の位置データを生成するとともに、この一連の位置データを絶対位置データが取得された複数地点間の補正処理と同様に補正して、より正確な一連の位置データとすることができる。
【図面の簡単な説明】
【0024】
【図1】本発明の実施形態の測位装置の全体構成を示すブロック図である。
【図2】測位装置の動作の一例を説明するもので、(a)〜(d)はその第1段階から第4段階で取得された移動軌跡データを表わした軌跡の図である。
【図3】相似変形処理の伸縮率と回転角度を説明する図である。
【図4】CPUにより実行される測位制御処理の制御手順を示すフローチャートである。
【図5】図4のステップS17で実行される移動履歴データ補正処理の詳細な手順を示すフローチャートである。
【図6】移動履歴データの補正処理の変形例を説明するもので、(a)は補正前の移動軌跡データの軌跡、(b)はGPSの測位により取得された絶対位置データとその軌跡、(c)は補正後の移動軌跡データの軌跡、(d)は(c)の一部分を拡大した図である。
【発明を実施するための形態】
【0025】
以下、本発明の実施の形態を図面に基づいて説明する。
【0026】
図1は、本発明の実施形態の測位装置の全体構成を示すブロック図である。
【0027】
この実施形態の測位装置1は、移動中に位置の測定を行って移動経路上の各地点の位置データを含む移動軌跡データを記録していく装置である。この測位装置1は、図1に示すように、装置の全体的な制御を行うCPU(中央演算処理装置)10と、CPU10に作業用のメモリ空間を提供するRAM11と、CPU10が実行する制御プログラムや制御データを格納したROM12と、GPS(全地球測位システム)衛星からの信号を受信するためのGPS受信アンテナ13およびGPS受信部14と、自律航法用センサである3軸地磁気センサ15および3軸加速度センサ16と、各種の情報表示や画像表示を行う表示部18と、各部に動作電圧を供給する電源19と、外部から操作指令を入力する操作部26と、自律航法用センサ(15,16)の計測データに基づいて自律航法の測位演算を行う自律航法制御処理部20と、自律航法制御処理部20により取得された移動軌跡データの補正演算を行う自律航法データ補正処理部21と、移動軌跡データが蓄積されていく移動履歴データ記憶部22等を備えている。
【0028】
GPS受信部14は、CPU10からの動作指令に基づき、GPS受信アンテナ13を介してGPS衛星の送信電波を捕捉してその復調処理を行う。CPU10は、このGPS衛星の送信データと送信信号に基づいて所定の測位演算を行うことで、現在位置を表わす絶対位置データを算出することができる。これらGPS受信アンテナ13、GPS受信部14およびCPU10の測位演算機能により、第1測位手段が構成される。
【0029】
3軸地磁気センサ15は、地磁気の方向を検出するセンサであり、3軸加速度センサ16は3軸方向の加速度をそれぞれ検出するセンサである。
【0030】
自律航法制御処理部20は、CPU10を補助する演算装置であり、所定のサンプリング周期で3軸地磁気センサ15と3軸加速度センサ16の計測データを、CPU10を介して入力し、これらの計測データから測位装置1の移動方向と移動量とを算出していく。さらに、CPU10から供給される直前の位置データに、上記算出された移動方向および移動量からなるベクトルデータを加算することで、自律航法の測位結果である位置データを算出してCPU10に送る。これらの3軸地磁気センサ15、3軸加速度センサ16、および自律航法制御処理部20により、第2測位手段が構成される。
【0031】
特に制限されるものではないが、本実施形態の測位装置の自律航法用のセンサ(15,16)と自律航法制御処理部20とは、歩行体についての自律航法の測位を可能とするものである。具体的には、自律航法制御処理部20は、3軸加速度センサ16の出力に現れる鉛直方向の大きな振動から歩数を計数し、予め設定されている歩幅データと乗算することで移動量を計測する。また、自律航法制御処理部20は、3軸加速度センサ16の出力に現れる歩行体の前後方向の大きな加速度変化と、左右方向の小さな加速度変化とを解析して、歩行体が3軸加速度センサ16の何れの向きに移動しているのかを計測する。さらに、3軸地磁気センサ15による地磁気の検出と、3軸加速度センサ16による重力方向の検出とから、各方位の向きを確定して、先に計測された移動方向を方位により求める。
【0032】
このような自律航法の測位によれば、例えば歩幅データに一定の誤差が含まれていたり、3軸地磁気センサ15の出力に一定のオフセット誤差が含まれていたりする場合に、自律航法の測位結果には、移動量と移動方向に関して一律の誤差がそれぞれ含まれることになる。
【0033】
自律航法データ補正処理部21は、CPU10を補助する演算装置であり、自律航法制御処理部20によって取得されて移動履歴データ記憶部22に記憶される移動軌跡データを、間欠的なGPS測位によって取得される絶対位置データに基づき、より正確な移動軌跡データに修正する補正演算を行うものである。また、移動履歴データ記憶部22に記憶された移動軌跡データが絶対座標に対応づけられていない相対座標の位置データを含む場合に、間欠的なGPS測位によって取得される絶対位置データに基づき、相対座標の移動軌跡データを絶対座標にそれぞれ対応づける補正演算も行うようになっている。これらの補正演算の詳細な説明は後述する。
【0034】
移動履歴データ記憶部22は、例えば不揮発性メモリなどにより構成され、自律航法制御処理部20によって取得された位置データが時系列に登録される移動軌跡データや、自律航法データ補正処理部21により補正された移動軌跡データが記憶されるようになっている。移動軌跡データは、絶対位置や相対位置を表わす一連の位置データのほかに、例えば、その取得順を表わす連番データ、各位置データの測位時刻のデータ、位置データが絶対座標のものか相対座標のものかを示す相対座標フラグ、位置データが未補正か補正済みかを示す補正フラグ等を含んだデータとなっている。
【0035】
ROM12には、自律航法による連続的な測位とGPSを利用した間欠的な測位とを併用して移動経路を表わす移動軌跡データを取得していく測位制御処理のプログラムが格納されている。また、ROM12には、自律航法データ補正処理部21により実行される移動履歴データ補正処理のプログラムが格納されている。CPU10とこの測位制御処理のプログラムにより主に軌跡データ取得手段が構成され、自律航法データ補正処理部21とそのプログラムにより主に軌跡データ補正手段が構成される。また、CPU10および自律航法データ補正処理部21によりプログラムを実行するコンピュータが構成される。上記のプログラムは、ROM12に格納するほか、例えば、データ読取装置を介してCPU10が読み取り可能な、例えば、光ディスク等の可搬型記憶媒体、フラッシュメモリ等の不揮発性メモリに格納しておくことが可能である。また、このようなプログラムを、キャリアウェーブ(搬送波)を媒体として通信回線を介して測位装置1にダウンロードされる形態を適用することもできる。
【0036】
[動作の概要]
次に、上記構成の測位装置1により実行される測位制御処理について説明する。
【0037】
ここでは、GPS衛星の電波が届かない場所で測位装置1を作動して、この測位装置1を携帯したユーザが移動した後に、GPSの電波が届く場所に出た場合の測位制御処理について説明する。
【0038】
図2には、上記場合の測位制御処理の流れを説明する図を示す。同図(a)〜(d)にはその第1段階から第4段階に取得された移動軌跡データの軌跡を示している。
【0039】
図2(a)に示すように、測位制御処理が開始されてGPSの測位ができない場合には、測位装置1では、絶対位置が不明なまま自律航法による測位を連続的に行って、相対座標による移動軌跡データを取得していく。この相対座標の移動軌跡データは、例えば、その開始位置A0に仮想的な位置データ(例えば緯度90度、経度0度など)を与えて、自律航法の測位により計測された相対変位データを開始地点A0の位置データに積算して得られるものであり、一連の相対変位データと等価なものである。この相対座標の移動軌跡データを時系列に結んだものが、図2(a)の軌跡La0である。
【0040】
次に、測位装置1がGPS衛星の電波の届く場所に出てきた場合、図2(b)に示すように、その直後、あるいは所定の間欠時間を開けた地点B1において、GPSによる測位が実行されて絶対位置データが取得される。GPS衛星の電波の届く場所に出てきた後も、自律航法による測位は継続的に実行される。
【0041】
GPSの測位で地点B1の絶対位置データが取得されたら、それより前に取得された相対座標の移動軌跡データ(軌跡La0)を、例えば終端側から始端側へさかのぼるように絶対位置に対応づけていくことで、絶対座標で表わされた移動軌跡データ(軌跡La1)を算出する。詳細には、相対座標の移動軌跡データ(軌跡La0)の終端B0の位置データと、GPS測位で取得した同一地点B1の絶対位置データとの差を算出し、この差を相対座標の移動軌跡データ(軌跡La0)にそれぞれ加算することで、絶対座標で表わされた移動軌跡データ(軌跡La1)を取得する。
【0042】
なお、この相対座標から絶対座標への変換処理は、地点B1で絶対位置データが取得されたタイミングに行うこともできるが、それ以外のタイミングに行うようにしても良い。この実施形態の測位装置1では、図2(c)のGPSの測位により間欠的に2つの地点B1,C2の絶対位置データが取得された時点で上記の変換処理が行なわれるようになっている。
【0043】
絶対位置データが取得された地点B1後の自律航法の測位では、この地点B1の絶対位置データに計測された相対変位データを積算していくことで、絶対位置に対応付けられた移動軌跡データが算出される。この移動軌跡データを時系列に結んだものが、図2(b)の軌跡Lb1である。
【0044】
次に、間欠的なGPSの受信タイミング(図2(b)では地点C1に来たタイミング)になるとGPSの測位を行う。この時点で自律航法の測位により得られた位置データが地点C1に対応し、GPSの測位により得られた位置データが地点C2に対応する。自律航法の測位では、移動に伴って誤差が累積されていくため、両者の位置データは一致せずに差異が生じている。
【0045】
本実施形態の測位装置1では、間欠的にGPSにより正確な測位が行なわれた場合に、この地点C2の正確な絶対位置データを用いて、先に取得されている移動軌跡データ(軌跡Lb1,La1)の補正処理が行われる。
【0046】
まず、図2(c)に示すように、この測位装置1では、複数回のGPSの測位が行われた地点間の移動軌跡データ(軌跡La1)の補正処理を行う。この補正処理は、補正前の移動軌跡データ(軌跡Lb1)が、GPSの測位により得られた複数地点B1,C1の位置データと合致するように、移動軌跡データに対応する軌跡Lb1を一様に伸縮および回転させる相似変形処理を行い、この相似変形処理後の軌跡Lb2に対応する一連の位置データを補正後の移動軌跡データとするものである。
【0047】
図3には、相似変形処理の伸縮率と回転角度を説明する図を示す。
【0048】
実際の補正演算では、上記のように軌跡の作成と軌跡を相似変形する処理を直接的に行うのではなく、次のような補正演算によって間接的に変形処理を行う。すなわち、まず、図3の地点B1,C1,C2の位置データから、線分B1−C1と線分B1−C2との伸縮率、回転角度θ(=ΔC1,B1,C2)とを算出する。そして、補正前の移動軌跡データ(軌跡Lb1)の各位置データに対して、地点B1からの距離を上記の伸縮率で伸縮させ、且つ、地点B1を中心に角度θで回転させた地点の位置データに変換する補正演算を行う。
【0049】
このような補正処理により、例えば、自律航法の測位で移動量の計測や移動方向の計測にそれぞれ一律の誤差が含まれているような場合に、この誤差を適切に除去して正確な移動軌跡データに補正することができる。
【0050】
続いて、この測位装置1では、図2(d)に示すように、GPSの測位前に取得された移動軌跡データ(軌跡La1)の補正処理を行う。この補正処理は、補正前の移動軌跡データに対応する軌跡La1を、先の補正処理で使用した相似変形の伸縮率および角度θを用いて、その終端地点B1を中心に一様に伸縮および回転させる相似変形処理を行い、この相似変形処理後の軌跡La2に対応する一連の位置データを補正後の移動軌跡データとするものである。
【0051】
この補正処理では、先の補正処理で使用した相似変形の伸縮率および角度θを用いているので、例えば、図3に示すように、補正前の移動軌跡データ(軌跡La1)の始端A1と、補正後の移動軌跡データ(軌跡La2)の始端A2とは、次のような関係となる。すなわち、線分B1−A1と線分B1−A2の伸縮率と、線分B1−C1と線分B1−C2の伸縮率が一致し、回転角度ΔA1,B1,A2と回転角度ΔC1,B1,C2とが一致する関係となる。
【0052】
このようなGPSの測位前に取得された移動軌跡データ(軌跡La1)に対する補正処理が行われることで、自律航法の測位で移動量や移動方向の計測結果にそれぞれ一律の誤差が含まれているような場合に、この誤差はGPSの測位前と測位後とで同様のものであるはずなので、この誤差を適切に除去して正確な移動軌跡データを得ることができる。
【0053】
その後、測位装置1を携帯したユーザが移動を継続した場合には、測位装置1において、地点B1からの移動の場合と同様の処理が繰り返し実行される。すなわち、間欠的なGPSの測位で得られた絶対位置データを基準として自律航法の測位が連続的に行われて移動軌跡データが取得される。そして、次の間欠的な時間が経過したら、再びGPSの測位を行って、この間の移動軌跡データを補正する。このような処理を繰り返し実行して、移動経路に沿った正確な移動軌跡データが記録されていく。
【0054】
[制御手順]
次に、上記の動作を実現する測位制御処理の制御手順について詳細に説明する。
【0055】
図4には、CPU10により実行される測位制御処理のフローチャートを示す。
【0056】
図4のフローチャートにおいて、ステップS1では、GPSの測位を間欠的に行うタイミングの判別が行われる。ステップS2〜S4では、自律航法の測位を開始する際に開始地点の絶対位置が不明である場合に、仮の開始地点の位置データを設定するとともに、続いて実行される自律航法の測位により得られる位置データが相対座標によるものであることを示すために、相対座標の使用を表わすフラグ変数“Fs”に値“1”をセットする処理が行われる。
【0057】
ステップS5〜S8では、1回分の自律航法の測位処理が行われる。すなわち、3軸地磁気センサ15と3軸加速度センサ16の計測データをサンプリングして(ステップS5,S6)、これらのサンプリングデータと直前の位置データとを自律航法制御処理部20に送り相対変位および現在の位置の算出を行わせる(ステップS7)。そして、自律航法制御処理部20から算出結果の位置データを受けて、この位置データに、連番データ、時刻データ、補正フラグ、相対座標フラグを付加して1地点分の移動履歴データとし、これを移動履歴データ記憶部22に書き込む(ステップS8)。ここで書き込まれる移動履歴データは、未補正のものなので補正フラグは“1”とし、相対座標フラグは変数Fsの値とする。
【0058】
つまり、GPSの測位を行う間欠的なタイミングでなければ、ステップS1,S5〜S8のループ処理が繰り返されることで、自律航法の測位が連続的に実行されて、移動履歴データ記憶部22に移動履歴データが蓄積されていく。また、測位制御処理の開始時に、GPSの測位が行われずに絶対位置が不明な場合には、ステップS3で仮の開始地点が設定されて、自律航法の測位が相対座標により連続的に実行されて、相対座標で位置データが表わされた移動履歴データが移動履歴データ記憶部22に記憶されていくようになっている。
【0059】
ステップS9〜S17では、GPSの測位とそれに伴った処理が実行される。すなわち、GPS受信部14を作動させて受信処理を行わせ(ステップS9)、GPS衛星からの送信電波の有無を判別して(ステップS10)、送信電波が無いと判別されれば、GPSの測位は中断してステップS5からの自律航法の測位処理へ分岐する。一方、送信電波があれば、受信信号に基づいてGPSの測位演算を行って絶対位置データを算出する(ステップS11)。
【0060】
続いて、受信信号からGPS測位の精度情報を取得して、この精度が所定値以上であるか判別する(ステップS12)。ここで、精度情報としては、例えば、DOP(Dilution of Precision)値、或いは、GST(GNSS Pseudorange Error Statistics)を適用することができる。この判別の結果、精度が所定値以上でなければ、GPSの測位結果は破棄して、ステップS5からの自律航法の測位処理へ分岐する。一方、所定値以上の精度があれば、測位結果の絶対位置データを例えばRAM11や移動履歴データ記憶部22へ記憶させ(ステップS13)、以降の自律航法の測位で絶対座標で位置データが求められるようになることから、相対座標の使用を表わす変数“Fs”に値“0”を代入する(ステップS14)。
【0061】
次いで、移動履歴データ記憶部22に補正前の移動履歴データ(すなわち、補正フラグが“1”のデータ)が有るか判別し(ステップS15)、これが有れば、前回のGPSの測位の絶対位置データが取得済みであるか判別する(ステップS16)。補正処理には、複数地点の絶対位置データが必要となるからである。そして、前回の絶対位置データも取得済みであれば、自律航法データ補正処理部21にコマンドを送って補正処理を実行させる(ステップS17)。そして、補正処理を実行させたら、ステップS1に戻る。一方、ステップS15,S16の何れかの判別処理の結果が“No”であれば、補正処理は実行せずに、ステップS5からの自律航法の測位処理へ分岐する。
【0062】
このようなステップS9〜S17の処理により、間欠的にGPSの測位が実行され、精度の高い絶対位置データが得られた場合に、この絶対位置データが基準地点の位置データとされて自律航法の測位がなされるようになっている。さらに、複数地点の精度の高い絶対位置データが得られたら、移動履歴データの補正処理が実行されるようになっている。
【0063】
図5には、図4のステップS17で実行される移動履歴データ補正処理の詳細なフローチャートを示す。
【0064】
移動履歴データの補正処理が開始されると、自律航法データ補正処理部21は、まず、移動履歴データ記憶部22から、前回のGPS測位の絶対位置データの取得時点から今回のGPS測位の絶対位置データの取得時点までの移動履歴データを抽出する(ステップS21)。図2の例を参照すれば、図2(b)の地点B1の絶対位置データが前回のGPS測位のもの、地点C2の絶対位置データが今回のGPS測位のものであり、ここでは軌跡Lb1の移動履歴データが抽出される。
【0065】
次に、自律航法データ補正処理部21は、抽出した移動履歴データに対応する軌跡をGPS測位の絶対位置データに合わせるように相似変形させて補正する処理を行う(ステップS22:第1補正手段)。図2の例では、同図(c)の補正前の軌跡Lb1を補正後の軌跡Lb2に修正する処理に相当する。さらに、ここで、相似変形の伸縮率と回転角度をRAM11等へ一時記憶しておく(ステップS23)。
【0066】
そして、修正後の各地点の移動履歴データを移動履歴データ記憶部22へ上書き保存する(ステップS24)。このとき、位置データは補正済みになっているので補正フラグの値は“0”とする。
【0067】
次に、自律航法データ補正処理部21は、移動履歴データ記憶部22に、相対座標で表わされた仮の移動履歴データ、すなわち相対座標フラグの値が“1”のデータが有るか確認する(ステップS25)。その結果、これらのデータが無ければ、このまま移動履歴データ補正処理を終了するが、有れば、この相対座標で表わされた仮の移動履歴データを絶対位置に対応づける処理と、軌跡を相似変形させるような補正処理(第2補正手段)とを行う(ステップS26)。絶対位置に対応づける処理は、図2(a)→(b)の軌跡La0から軌跡La1へ変換する処理である。また、相似変形の補正処理は、図2(d)の軌跡La1を軌跡La2へ変換する処理である。この相似変形の補正処理では、ステップS23で一時記憶しておいた伸縮率と回転角度を用いた軌跡の相似変形により実行する。
【0068】
そして、仮の移動履歴データについても補正処理を行ったら、修正後の各地点の移動履歴データを移動履歴データ記憶部22へ上書き保存する(ステップS27)。このとき、位置データは補正済みになっているので補正フラグの値は“0”とし、位置データは絶対座標の値に変換済みになっているので相対座標フラグの値は“0”とする。移動履歴データを上書き保存したら、この移動履歴データ補正処理を終了する。
【0069】
このような移動履歴データ補正処理により、図2(a)〜(d)を参照して先に説明した補正処理が実現される。
【0070】
[変形例]
図6には、移動履歴データの補正処理の変形例の説明図を示す。同図(a)は補正前の移動軌跡データの軌跡、(b)はGPSの測位により取得された絶対位置データの軌跡、(c)は補正後の移動軌跡データの軌跡、(d)は(c)の一部分を拡大した図である。
【0071】
この補正処理は、GPSの測位により2地点より多い複数地点(タイミングT6〜T10の移動地点)の絶対位置データが取得された状況で、この複数地点間の移動履歴データの補正と、この複数地点以前に絶対位置が不明な状態で取得された移動履歴データの補正とを行うものである。
【0072】
図6(a)において、点線の軌跡Lc1が絶対位置が不明な状態で自律航法の測位により取得された移動履歴データの軌跡、実線の軌跡Ld1が絶対位置データを取得後に自律航法の測位により取得された移動履歴データの軌跡である。また、図6(b),(c)において、円記号(の中心点)がGPSの測位により取得された絶対位置である。図6の符号T0〜T10は測位が実行された各タイミングを示している。
【0073】
図6(a),(b)に示すように、測位装置1で自律航法により連続的に測位が行われる一方、タイミングT6〜T10の各移動地点でGPS測位により絶対位置データが取得された場合、まず、次のようにして複数地点間の移動履歴データ(軌跡Ld1)の補正を行う。
【0074】
すなわち、図6(c)の補正後の軌跡Ld2に示すように、軌跡Ld1の終端をGPSの絶対位置データに対応する地点に固定し、軌跡Ld1のタイミングT6〜T9の各位置データがGPSにより測位された絶対位置データに近くなるように、軌跡Ld1を一様に伸縮および回転させる相似変形処理を行う。
【0075】
この相似変形処理において、補正後の軌跡Ld2のタイミングT6〜T9の位置データ(図6(c)の四角記号の中心点に相当)と、GPS測位のタイミングT6〜T9の絶対位置データ(図6(c)の円記号の中心点に相当)とは、全てが合致するとは限らない。そこで、図6(d)にその一部の拡大図を示すように、これらの位置データと絶対位置データとの差異ベクトルV6〜V9が総合的に小さくなる伸縮率および回転角度を算出する。具体的には、差異ベクトルV6〜V9の二乗総和(すなわち、タイミングT6〜T9の位置データと絶対位置データとの二乗誤差の総和に相当)を最小にする伸縮率および回転角度を算出する。
【0076】
なお、この伸縮率と回転角度の演算負荷を軽くするために、例えば、伸縮率については、軌跡Ld2の両端をタイミングT6,T10の絶対位置データに合致させるなどの別の条件で求め、回転角度だけ上記差異ベクトルV6〜V9の二乗総和を最小にするという条件で求めるようにしても良い。また、これとは逆に、例えば、回転角度については、軌跡Ld2の両端をタイミングT6,T10の絶対位置データに合致させるなどの別の条件で求め、伸縮率だけ上記差異ベクトルV6〜V9の二乗総和を最小にするという条件で求めるようにしても良い。
【0077】
そして、上記のように算出した伸縮率および回転角度で相似変形した軌跡Ld2の各位置データが補正後のデータとなるように、複数地点間の移動履歴データ(軌跡Ld1)の補正演算を行う。
【0078】
次いで、自律航法データ補正処理部21は、絶対位置が不明な状態で取得された移動履歴データ(軌跡Lc1)についての補正処理を行う。この移動履歴データについては、初めにタイミングT6の絶対位置データに基づいて、さかのぼるように相対座標から絶対座標への変換を行って絶対座標で表わされた移動履歴データにしておく。そして、先の軌跡Ld1に対して行った相似変形と同一の伸縮率および回転角度を使用した相似変形処理を行った場合に、その相似変形処理後の軌跡Lc2の各位置データが補正後のデータとなるように、移動履歴データ(軌跡Lc1)の補正演算を行う。ここで、相似変形の回転中心は、先の軌跡Ld1に対して行った相似変形と同じくタイミングT10の地点とする。
【0079】
このような補正処理により、2地点より多い複数地点の絶対位置データがGPSの測位により求められている場合に、自律航法の測位により得られた複数地点間の移動履歴データ、および、それ以前に絶対位置が不明な状態で取得された移動履歴データを適宜補正することができる。
【0080】
なお、この変形例の補正処理は、例えば、GPSの測位によって精度の高い絶対位置データ(第1精度レンジの絶対位置データ)が得られる前に、精度が中程度の絶対位置データ(第2精度レンジの絶対位置データ)が複数地点で算出された場合に、これら精度が中程度の絶対位置データを複数利用して移動履歴データを適宜補正するのに適用することができる。
【0081】
また、上記の補正処理において、精度の高い絶対位置データが、例えば、図6のタイミングT8で取得されているような場合には、軌跡Ld1,Lc1の相似変形をタイミングT8の絶対位置を回転中心として行うようにしても良い。
【0082】
以上のように、この実施形態の測位装置1およびその測位方法によれば、絶対位置が不明な状態で自律航法の測位によって取得されている移動履歴データに対して、その後に複数地点で絶対位置データが取得された場合に、相対座標から絶対座標へ変換が行われ、且つ、この移動履歴データに対して複数地点の絶対位置データを利用した補正処理が行われるようになっている。したがって、絶対位置が不明な状態で自律航法の測位が連続的に行われた移動経路についても、正確な移動履歴データを記録していくことが可能となる。
【0083】
また、この実施形態の測位装置1およびその測位方法によれば、まず、絶対位置データが取得された複数地点間の移動履歴データに対して、その軌跡を絶対位置データに合うように相似変形させ、この相似変形後の軌跡が補正後のデータとなるように補正処理を行い、次いで、絶対位置が不明な状態で取得された移動履歴データに対しても、上記の相似変形と同一の伸縮率および回転角度で、軌跡を相似変形させ、この相似変形後の軌跡が補正後のデータとなるように補正処理を行う。したがって、自律航法の測位に一律の誤差が生じているような場合に、絶対位置が不明な状態で取得された移動履歴データに対しても、この誤差を適宜除去して正確な移動履歴データを得ることができる。
【0084】
また、この実施形態の測位装置1およびその測位方法によれば、移動履歴データを補正する際に、2地点より多い複数地点の絶対位置データがGPSの測位により取得されている場合に、移動履歴データの対応する地点のデータが絶対位置データに近くなるように、具体的には、それらの二乗誤差の総和が最小となるように、相似変形の伸縮率と回転角度の何れか又は両方が求められるようになっている。したがって、上記のような場合にも、適宜、移動履歴データを正確な値に補正することが可能となる。
【0085】
なお、本発明は、上記実施の形態に限られるものではなく、様々な変更が可能である。例えば、上記実施の形態では、絶対位置が不明な状態で自律航法の測位が行われた場合に、仮の開始地点の位置データを設定して、相対座標により移動履歴データを作成した例を示したが、相対座標を使用せずに、自律航法の測位で計測された一連の移動変位データを記録しておくようにしても良い。そして、次に、GPSの測位により絶対位置データが取得された場合に、さかのぼるようにこの一連の移動変位データを絶対位置に対応づけて絶対座標で表わされた一連の位置データに変換することができる。
【0086】
また、上記実施の形態では、移動履歴データの補正処理として、移動履歴データに対応する軌跡を、GPSの測位結果の絶対位置データに合うように、一様に伸縮および回転させる補正内容を採用した例を示したが、補正処理の内容は種々のものを適用可能である。例えば、移動距離に応じて進行方向を基準に一定の誤差が積算されていくような場合には、今回のGPSの測位地点で計測された誤差を、前回のGPSの測位地点からの移動経路に沿った移動距離で除算して単位移動距離当たりの誤差を補正パラメータとして求め、この誤差が前回のGPSの測位地点からの移動履歴データに移動距離に応じて付加されているものとして、この誤差を削除する内容の補正処理を採用することもできる。この場合、絶対位置が不明な状態で自律航法の測位により取得された移動履歴データについても、上記補正処理の補正パラメータを用いて同様に補正処理を行うことができる。
【0087】
また、上記実施形態では、第1測位手段の測位として、GPSによる測位を適用した例を示したが、別の測位衛星を利用した測位を同様に適用しても良い。また、第2測位手段の測位として、3軸地磁気センサと3軸加速度センサとを用いて歩行体の測位を行う例を示したが、例えば、車輪の回転検出とジャイロセンサの回転角の検出により車両の移動量と移動方向とを計測して測位を行うものを採用するなど、種々に変更が可能である。その他、実施形態で示した細部構成および細部方法は、発明の趣旨を逸脱しない範囲で適宜変更可能である。
【符号の説明】
【0088】
1 測位装置
10 CPU
11 RAM
12 ROM
13 GPS受信アンテナ
14 GPS受信部
15 3軸地磁気センサ
16 3軸加速度センサ
20 自律航法制御処理部
21 自律航法データ補正処理部
22 移動履歴データ記憶部
La0,La1,La2,Lb1,Lb2 軌跡
B1,C2 GPSの測位地点
Lc1,Lc2,Ld1,Ld2 軌跡
V6〜V9 差異ベクトル
【特許請求の範囲】
【請求項1】
測位衛星の信号を受信して絶対位置の測定を行う第1測位手段と、
動きと方位の検出に基づいて相対変位の測定を行う第2測位手段と、
前記第2測位手段の測定を連続的に行わせるとともに前記第1測位手段の測定を間欠的に行わせて移動経路に沿った一連の位置データを取得していく軌跡データ取得手段と、
前記第1測位手段の測定により取得された複数地点の絶対位置データに基づき前記軌跡データ取得手段により取得された一連の位置データを部分ごとに補正していく軌跡データ補正手段と、
を備え、
絶対位置が不明な状態で前記第2測位手段の連続的な測位により一連の相対変位データが取得され、この取得後に前記第1測位手段の測定により複数地点の絶対位置データが取得された場合に、
前記軌跡データ取得手段は、前記一連の相対変位データを、その後に取得された絶対位置データに基づき、絶対位置にそれぞれ対応づけて一連の位置データに変換し、
前記軌跡データ補正手段は、絶対位置データが取得された前記複数地点間の一連の位置データに対して行った補正と同一のパラメータを用いて、絶対位置データが取得された前記複数地点より前の一連の位置データを補正することを特徴とする測位装置。
【請求項2】
前記軌跡データ補正手段は、
絶対位置データが取得された前記複数地点間の一連の位置データに対して、この一連の位置データに対応する軌跡を前記複数地点の絶対位置データに合うように一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第1補正手段と、
絶対位置データが取得される前記複数地点より前の一連の位置データに対して、この一連の位置データに対応する軌跡を、前記第1補正手段による前記相似変形処理の伸縮率および回転角度と同一のパラメータを用いて、一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第2補正手段と、
を有することを特徴とする請求項1記載の測位装置。
【請求項3】
前記第1補正手段は、
前記複数地点が3つ以上の地点である場合に、前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データとの夫々の差が小さくなるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴とする請求項2記載の測位装置。
【請求項4】
前記第1補正手段は、
前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データと、の二乗誤差の総和が最小になるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴とする請求項3記載の測位装置。
【請求項5】
測位衛星の信号を受信して絶対位置の測定を行う第1測位ステップと、
動きと方位の検出に基づいて相対変位の測定を行う第2測位ステップと、
前記第2測位ステップの測定を連続的に行わせるとともに前記第1測位ステップの測定を間欠的に行わせて移動経路に沿った一連の位置データを取得していく軌跡データ取得工程と、
前記第1測位ステップの測定により取得された複数地点の絶対位置データに基づき前記軌跡データ取得工程により取得された一連の位置データを部分ごとに補正していく軌跡データ補正工程と、
を備え、
絶対位置が不明な状態で前記第2測位ステップの連続的な測位により一連の相対変位データが取得され、この取得後に前記第1測位ステップの測定により複数地点の絶対位置データが取得された場合に、
前記軌跡データ取得工程は、前記一連の相対変位データを、その後に取得された絶対位置データに基づき、絶対位置にそれぞれ対応づけて一連の位置データに変換し、
前記軌跡データ補正工程は、絶対位置データが取得された前記複数地点間の一連の位置データに対して行った補正と同一のパラメータを用いて、絶対位置データが取得された前記複数地点より前の一連の位置データを補正することを特徴とする測位方法。
【請求項6】
前記軌跡データ補正工程は、
絶対位置データが取得された前記複数地点間の一連の位置データに対して、この一連の位置データに対応する軌跡を前記複数地点の絶対位置データに合うように一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第1補正工程と、
絶対位置データが取得される前記複数地点より前の一連の位置データに対して、この一連の位置データに対応する軌跡を、前記第1補正工程による前記相似変形処理の伸縮率および回転角度と同一のパラメータを用いて、一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第2補正工程と、
を有することを特徴とする請求項5記載の測位方法。
【請求項7】
前記第1補正工程は、
前記複数地点が3つ以上の地点である場合に、前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データとの夫々の差が小さくなるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴とする請求項6記載の測位方法。
【請求項8】
前記第1補正工程は、
前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データと、の平均二乗誤差が最小になるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴とする請求項7記載の測位方法。
【請求項9】
測位衛星の信号を受信して絶対位置の測定を行う第1測位手段と、動きと方位の検出に基づいて相対変位の測定を行う第2測位手段とを制御するコンピュータに、
前記第2測位手段の測定を連続的に行わせるとともに前記第1測位手段の測定を間欠的に行わせて移動経路に沿った一連の位置データを取得していく軌跡データ取得機能と、
前記第1測位手段の測定により取得された複数地点の絶対位置データに基づき前記軌跡データ取得機能により取得された一連の位置データを部分ごとに補正していく軌跡データ補正機能と、
を実現させ、
絶対位置が不明な状態で前記第2測位手段の連続的な測位により一連の相対変位データが取得され、この取得後に前記第1測位手段の測定により複数地点の絶対位置データが取得された場合に、
前記軌跡データ取得機能は、前記一連の相対変位データを、その後に取得された絶対位置データに基づき、絶対位置にそれぞれ対応づけて一連の位置データに変換し、
前記軌跡データ補正機能は、絶対位置データが取得された前記複数地点間の一連の位置データに対して行った補正と同一のパラメータを用いて、絶対位置データが取得された前記複数地点より前の一連の位置データを補正することを特徴とするプログラム。
【請求項10】
前記軌跡データ補正機能は、
絶対位置データが取得された前記複数地点間の一連の位置データに対して、この一連の位置データに対応する軌跡を前記複数地点の絶対位置データに合うように一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第1補正機能と、
絶対位置データが取得される前記複数地点より前の一連の位置データに対して、この一連の位置データに対応する軌跡を、前記第1補正機能による前記相似変形処理の伸縮率および回転角度と同一のパラメータを用いて、一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第2補正機能と、
を有することを特徴とする請求項9記載のプログラム。
【請求項11】
前記第1補正機能は、
前記複数地点が3つ以上の地点である場合に、前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データとの夫々の差が小さくなるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴とする請求項10記載のプログラム。
【請求項12】
前記第1補正機能は、
前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データと、の二乗誤差の総和が最小になるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴とする請求項11記載のプログラム。
【請求項1】
測位衛星の信号を受信して絶対位置の測定を行う第1測位手段と、
動きと方位の検出に基づいて相対変位の測定を行う第2測位手段と、
前記第2測位手段の測定を連続的に行わせるとともに前記第1測位手段の測定を間欠的に行わせて移動経路に沿った一連の位置データを取得していく軌跡データ取得手段と、
前記第1測位手段の測定により取得された複数地点の絶対位置データに基づき前記軌跡データ取得手段により取得された一連の位置データを部分ごとに補正していく軌跡データ補正手段と、
を備え、
絶対位置が不明な状態で前記第2測位手段の連続的な測位により一連の相対変位データが取得され、この取得後に前記第1測位手段の測定により複数地点の絶対位置データが取得された場合に、
前記軌跡データ取得手段は、前記一連の相対変位データを、その後に取得された絶対位置データに基づき、絶対位置にそれぞれ対応づけて一連の位置データに変換し、
前記軌跡データ補正手段は、絶対位置データが取得された前記複数地点間の一連の位置データに対して行った補正と同一のパラメータを用いて、絶対位置データが取得された前記複数地点より前の一連の位置データを補正することを特徴とする測位装置。
【請求項2】
前記軌跡データ補正手段は、
絶対位置データが取得された前記複数地点間の一連の位置データに対して、この一連の位置データに対応する軌跡を前記複数地点の絶対位置データに合うように一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第1補正手段と、
絶対位置データが取得される前記複数地点より前の一連の位置データに対して、この一連の位置データに対応する軌跡を、前記第1補正手段による前記相似変形処理の伸縮率および回転角度と同一のパラメータを用いて、一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第2補正手段と、
を有することを特徴とする請求項1記載の測位装置。
【請求項3】
前記第1補正手段は、
前記複数地点が3つ以上の地点である場合に、前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データとの夫々の差が小さくなるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴とする請求項2記載の測位装置。
【請求項4】
前記第1補正手段は、
前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データと、の二乗誤差の総和が最小になるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴とする請求項3記載の測位装置。
【請求項5】
測位衛星の信号を受信して絶対位置の測定を行う第1測位ステップと、
動きと方位の検出に基づいて相対変位の測定を行う第2測位ステップと、
前記第2測位ステップの測定を連続的に行わせるとともに前記第1測位ステップの測定を間欠的に行わせて移動経路に沿った一連の位置データを取得していく軌跡データ取得工程と、
前記第1測位ステップの測定により取得された複数地点の絶対位置データに基づき前記軌跡データ取得工程により取得された一連の位置データを部分ごとに補正していく軌跡データ補正工程と、
を備え、
絶対位置が不明な状態で前記第2測位ステップの連続的な測位により一連の相対変位データが取得され、この取得後に前記第1測位ステップの測定により複数地点の絶対位置データが取得された場合に、
前記軌跡データ取得工程は、前記一連の相対変位データを、その後に取得された絶対位置データに基づき、絶対位置にそれぞれ対応づけて一連の位置データに変換し、
前記軌跡データ補正工程は、絶対位置データが取得された前記複数地点間の一連の位置データに対して行った補正と同一のパラメータを用いて、絶対位置データが取得された前記複数地点より前の一連の位置データを補正することを特徴とする測位方法。
【請求項6】
前記軌跡データ補正工程は、
絶対位置データが取得された前記複数地点間の一連の位置データに対して、この一連の位置データに対応する軌跡を前記複数地点の絶対位置データに合うように一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第1補正工程と、
絶対位置データが取得される前記複数地点より前の一連の位置データに対して、この一連の位置データに対応する軌跡を、前記第1補正工程による前記相似変形処理の伸縮率および回転角度と同一のパラメータを用いて、一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第2補正工程と、
を有することを特徴とする請求項5記載の測位方法。
【請求項7】
前記第1補正工程は、
前記複数地点が3つ以上の地点である場合に、前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データとの夫々の差が小さくなるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴とする請求項6記載の測位方法。
【請求項8】
前記第1補正工程は、
前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データと、の平均二乗誤差が最小になるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴とする請求項7記載の測位方法。
【請求項9】
測位衛星の信号を受信して絶対位置の測定を行う第1測位手段と、動きと方位の検出に基づいて相対変位の測定を行う第2測位手段とを制御するコンピュータに、
前記第2測位手段の測定を連続的に行わせるとともに前記第1測位手段の測定を間欠的に行わせて移動経路に沿った一連の位置データを取得していく軌跡データ取得機能と、
前記第1測位手段の測定により取得された複数地点の絶対位置データに基づき前記軌跡データ取得機能により取得された一連の位置データを部分ごとに補正していく軌跡データ補正機能と、
を実現させ、
絶対位置が不明な状態で前記第2測位手段の連続的な測位により一連の相対変位データが取得され、この取得後に前記第1測位手段の測定により複数地点の絶対位置データが取得された場合に、
前記軌跡データ取得機能は、前記一連の相対変位データを、その後に取得された絶対位置データに基づき、絶対位置にそれぞれ対応づけて一連の位置データに変換し、
前記軌跡データ補正機能は、絶対位置データが取得された前記複数地点間の一連の位置データに対して行った補正と同一のパラメータを用いて、絶対位置データが取得された前記複数地点より前の一連の位置データを補正することを特徴とするプログラム。
【請求項10】
前記軌跡データ補正機能は、
絶対位置データが取得された前記複数地点間の一連の位置データに対して、この一連の位置データに対応する軌跡を前記複数地点の絶対位置データに合うように一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第1補正機能と、
絶対位置データが取得される前記複数地点より前の一連の位置データに対して、この一連の位置データに対応する軌跡を、前記第1補正機能による前記相似変形処理の伸縮率および回転角度と同一のパラメータを用いて、一様に伸縮および回転させる相似変形処理を行った場合に、この相似変形処理後の軌跡に対応する一連の位置データが修正後の位置データとなるように補正処理を行う第2補正機能と、
を有することを特徴とする請求項9記載のプログラム。
【請求項11】
前記第1補正機能は、
前記複数地点が3つ以上の地点である場合に、前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データとの夫々の差が小さくなるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴とする請求項10記載のプログラム。
【請求項12】
前記第1補正機能は、
前記複数地点の絶対位置データと、前記相似変形処理後の軌跡の前記複数地点に対応する複数の位置データと、の二乗誤差の総和が最小になるように、前記相似変形処理の伸縮率および回転角度の何れか一方又は両方を決定する
ことを特徴とする請求項11記載のプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−122819(P2012−122819A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2010−273127(P2010−273127)
【出願日】平成22年12月8日(2010.12.8)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成22年12月8日(2010.12.8)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
[ Back to top ]