
測位装置、測位方法及びプログラム
【課題】相異なる測位方法を採用しつつ現在位置の特定精度の低下を防止する。
【解決手段】測位装置100であって、測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位するGPS受信部1と、連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する自律航法制御処理部4と、この自律航法制御処理部による検出結果に基づいて算出された、当該装置本体の相対的な変位の測位精度に基づいて、GPS受信部及び自律航法制御処理部の少なくとも一方の測定動作を制御する動作制御部6と、この動作制御部により測定動作が制御されるGPS受信部及び自律航法制御処理部による測定結果に基づいて、当該装置本体の現在位置を特定する現在位置特定部7と、を備えている。
【解決手段】測位装置100であって、測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位するGPS受信部1と、連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する自律航法制御処理部4と、この自律航法制御処理部による検出結果に基づいて算出された、当該装置本体の相対的な変位の測位精度に基づいて、GPS受信部及び自律航法制御処理部の少なくとも一方の測定動作を制御する動作制御部6と、この動作制御部により測定動作が制御されるGPS受信部及び自律航法制御処理部による測定結果に基づいて、当該装置本体の現在位置を特定する現在位置特定部7と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測位装置、測位方法及びプログラムに関する。
【背景技術】
【0002】
従来、GPS(Global Positioning System)衛星からの電波を利用して測位するとともに、各種測位センサを補助的に使用することによりGPS衛星からの電波を受信できない状況であっても自律的に測位を行う測位装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−177772号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記特許文献1等では、GPSによる測位データの精度の判断が、例えば、GST値、C/N値、DOP値及びEPE値等により可能である。一方、自律的な測位に関しては測位誤差(例えば、5%)を一律に当て嵌めて、測位精度の誤差量をを算出しているが、当該装置の保持状態で精度が大きく変動するため、一律な測位誤差では現在位置の特定を正確に行うことができない場合がある。
【0005】
そこで、本発明の課題は、相異なる測位方法を採用しつつ現在位置の特定精度の低下を防止することができる測位装置、測位方法及びプログラムを提供することである。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明の測位装置は、
使用者によって所持される測位装置であって、測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段と、連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段と、この第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段と、この第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段及び前記第2測位手段の少なくとも一方の測定動作を制御する制御手段と、この制御手段により測定動作が制御される前記第1測位手段及び前記第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段と、を備えることを特徴としている。
【0007】
また、本発明の測位方法は、
使用者によって所持される測位装置を用いた測位方法であって、測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位処理と、連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位処理と、この第2測位処理による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出処理と、この第1算出処理により算出された前記測位精度に基づいて、前記第1測位処理及び前記第2測位処理の少なくとも一方の測定動作を制御する制御処理と、この制御処理により測定動作が制御される前記第1測位処理及び前記第2測位処理による測定結果に基づいて、当該装置本体の現在位置を特定する特定処理と、を行うことを特徴としている。
【0008】
また、本発明のプログラムは、
使用者によって所持される測位装置のコンピュータを、測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段、連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段、この第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段、この第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段及び前記第2測位手段の少なくとも一方の測定動作を制御する制御手段、この制御手段により測定動作が制御される前記第1測位手段及び前記第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段、として機能させることを特徴としている。
【発明の効果】
【0009】
本発明によれば、相異なる測位方法を採用しつつ現在位置の特定精度の低下を防止することができる。
【図面の簡単な説明】
【0010】
【図1】本発明を適用した一実施形態の測位装置の概略構成を示すブロック図である。
【図2】図1の測位装置による測位処理に係る動作の一例を示すフローチャートである。
【図3】図2の測位処理の続きに係る動作の一例を示すフローチャートである。
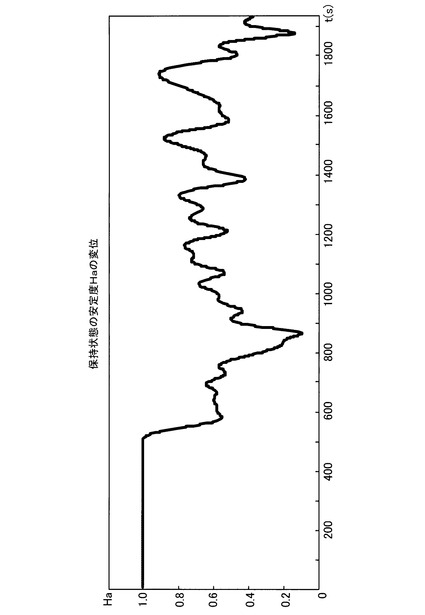
【図4】図1の測位装置本体の保持状態の安定度の変位を模式的に示す図である。
【図5】変形例1の測位装置の概略構成を示すブロック図である。
【図6】図5の測位装置による測位処理に係る動作の一例を示すフローチャートである。
【発明を実施するための形態】
【0011】
以下に、本発明について、図面を用いて具体的な態様を説明する。ただし、発明の範囲は、図示例に限定されない。
本実施形態の測位装置100は、ユーザに携帯所持され、GPS(全地球測位システム)による測位(GPS測位)と、自律航法用センサを用いた測位(自律航法測位)とを併用して、ユーザの移動軌跡を表わす一連の位置データを逐次記録していく装置である。
【0012】
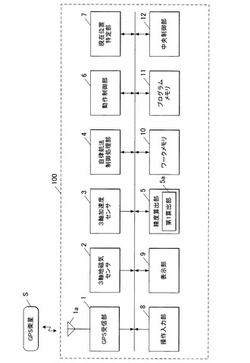
図1は、本発明を適用した一実施形態の測位装置100の概略構成を示すブロック図である。
図1に示すように、測位装置100は、具体的には、GPS受信部1と、3軸地磁気センサ2と、3軸加速度センサ3と、自律航法制御処理部4と、精度算出部5と、動作制御部6と、現在位置特定部7と、操作入力部8と、表示部9と、ワークメモリ10と、プログラムメモリ11と、中央制御部12とを備えている。
【0013】
GPS受信部1は、GPS(全地球測位システム)衛星Sから送信されたデータを受信アンテナ1aを介して受信する。
即ち、受信アンテナ1aは、地球低軌道に打ち上げられた複数のGPS衛星(測位衛星;図1には一つのみ図示)Sから送信されるGPS信号(例えば、アルマナック(概略軌道情報)やエフェメリス(詳細軌道情報)など)を所定のタイミングで受信し、当該GPS信号をGPS受信部1に出力する。GPS受信部1は、受信アンテナ1aを介して受信されるGPS信号の復調処理を行って、GPS衛星Sの各種送信データを取得する。そして、GPS受信部1は、取得された送信データに基づいて、所定の測位演算を行うことで、当該端末本体の絶対的な2次元の現在位置(緯度、経度)を測位して当該位置に係る位置情報(例えば、緯度、経度の座標情報)を測位結果として取得する。
また、GPS受信部1は、動作制御部6により設定された所定の時間間隔毎に、当該装置本体の現在位置に係る位置情報を逐次取得する(詳細後述)。
ここで、GPS受信部1及び受信アンテナ1aは、測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段を構成している。
【0014】
3軸地磁気センサ2は、自律航法用センサであり、互いに直交する3軸方向の地磁気の大きさをそれぞれ検出する。そして、3軸地磁気センサ2は、検出された各軸の検出信号を自律航法制御処理部4に出力する。
【0015】
3軸加速度センサ3は、自律航法用センサであり、互いに直交する3軸方向の加速度をそれぞれ検出する。そして、3軸加速度センサ3は、検出された各軸の検出信号を所定の周波数でサンプリングして、自律航法制御処理部4及び精度算出部5に出力する。
【0016】
自律航法制御処理部4は、3軸地磁気センサ2及び3軸加速度センサ3により検出された検出データに基づいて、自律航法の測位演算を連続的に行う。
即ち、自律航法制御処理部4は、所定のサンプリング周期で3軸地磁気センサ2及び3軸加速度センサ3により検出された検出データを取得して、これらの検出データから測位装置100の移動方向及び移動量を算出していく。さらに、自律航法制御処理部4は、検出データを取得する直前の当該装置本体の存する現在位置の位置データに、算出された移動方向及び移動量からなるベクトルデータを加算することで、自律航法の測位結果である位置データを算出する。また、自律航法制御処理部4は、当該位置データを所定の時間間隔毎に連続して算出することで、当該装置本体の相対的な変位を取得する。
このように、3軸地磁気センサ2、3軸加速度センサ3及び自律航法制御処理部4は、連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段を構成している。
【0017】
精度算出部5は、当該装置本体の相対的な変位の測位精度を算出する第1算出部5aを具備している。
第1算出部5aは、自律航法制御処理部4による測定結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する。即ち、第1算出部5aは、3軸加速度センサ3により検出された検出信号の検出結果に基づいて、ユーザによる当該装置本体の保持状態の安定度Haを測位精度として算出する。ここで、装置本体の保持状態の安定度Haは、当該装置本体が安定状態、即ち、重力軸以外で回転していない状態を基準(Ha=1)として表される。
具体的には、当該装置本体の3軸加速度センサ3が重力軸以外で回転している状態では、加速度の垂直抗力成分が各軸の検出信号の0Hz以外の周波数成分に表れ、一方、3軸加速度センサ3が重力軸以外で回転していない状態では、垂直抗力成分が各軸の検出信号の0Hzの周波数成分に表れることから、この逆方向が重力軸方向となる。そこで、第1算出部5aは、3軸加速度センサ3に対する重力軸方向G(x,y,z)を特定する上で、当該3軸加速度センサ3により検出された各軸の検出信号に対して、平均化フィルタなどの各種のローパスフィルタを施して、0Hzの周波数成分(X0,Y0,Z0)を抽出する。
なお、上記した3軸加速度センサ3の各軸の検出信号の0Hzの周波数成分の抽出方法は、一例であってこれに限られるものではなく、適宜任意に変更可能である。
【0018】
また、第1算出部5aは、3軸加速度センサ3により検出された各軸の検出信号の0Hzの周波数成分(X0,Y0,Z0)の2乗和に基づいて、当該装置本体の保持状態の安定度Haを算出する。
当該装置本体の保持状態とは、例えば、当該装置をユーザのポケットに入れている状態、ユーザが背負うリュックに固定せずに入れている状態、籠に固定せずに入れて自由に移動や回転してしまう状態などがある。
先ず、第1算出部5aは、装置本体の3軸加速度センサ3が重力軸以外で回転していない静止状態にて、基準となる各軸の検出信号の0Hzの周波数成分(X0,Y0,Z0)を抽出しておく。また、第1算出部5aは、所定の時間間隔毎に3軸加速度センサ3により検出された検出信号の各軸の検出信号の0Hzの周波数成分(xa,ya,za)を抽出していく。そして、第1算出部5aは、下記式(1)に従って、所定タイミングにおける0Hzの周波数成分(xa,ya,za)の2乗和の平方根を、基準となる各軸の検出信号の0Hzの周波数成分(X0,Y0,Z0)の2乗和の平方根で除算して、当該装置本体の保持状態の安定度Ha(図4参照)を当該装置本体の相対的な変位の測位精度として算出する。
【数1】

【0019】
このように、精度算出部5は、自律航法制御処理部4による測定結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段を構成している。
【0020】
動作制御部6は、GPS受信部1及び自律航法制御処理部4による測定動作を制御する。
即ち、動作制御部6は、精度算出部5の第1算出部5aにより算出された測位精度(装置本体の保持状態の安定度Ha)に基づいて、GPS受信部1及び自律航法制御処理部4による測定動作を制御する。
ここで、当該装置本体の3軸加速度センサ3が重力軸以外で回転していない静止状態では、第1算出部5aにより算出される装置本体の保持状態の安定度Haは「Ha=1.0」となる。そこで、動作制御部6は、安定度Haが「1.0≧Ha≧0.9」では、移動距離に対する誤差範囲が±5%程度となるため、当該装置本体が所定位置に保持されて静止している状態にほぼ等しい安定状態であると特定し、また、「0.9>Ha≧0.8」では、移動距離に対する誤差範囲が±20%程度となるため、静止していない不安定な状態であると特定し、また、「Ha<0.8」では、誤差範囲が大きく測定不能な状態であると特定する。
なお、安定度Haが「Ha>1.0」では、人為的に重力軸方向に加速度が付加されている状態であると考えられる。
ここで、図4に示す「装置本体の保持状態の安定度Ha」の一例では、例えば、500秒(s)前後までは、安定度Haが「Ha=1.0」であり保持状態が安定状態となっているが、それ以降では、安定度Haの値が大きく変動した状態となっている。
【0021】
そして、動作制御部6は、装置本体の保持状態の安定度Haの判定結果に応じて、GPS受信部1及び自律航法制御処理部4による測定動作を制御する。具体的には、動作制御部6は、安定度Haの判定結果に応じて、GPS受信部1による装置本体の絶対的な位置の測定間隔を変化させる。例えば、動作制御部6は、安定度Haが「1.0≧Ha≧0.9」では、GPS受信部1による位置情報の測定間隔を所定時間A(例えば、10分等)に設定し、また、「0.9>Ha≧0.8」では、GPS受信部1による測定間隔を所定時間A/4(例えば、2.5分等)に設定し、また、「Ha<0.8」では、GPS受信部1による測定間隔を毎分に設定する。
ここで、GPS受信部1による装置本体の絶対的な位置の測定間隔は、図示しないタイマにより計時されるが、当該タイマは、動作制御部6に具備されていても良いし、当該動作制御部6以外の各部、例えば、中央制御部12に具備されていても良い。
【0022】
なお、動作制御部6は、精度算出部5の第1算出部5aにより算出された測位精度(装置本体の保持状態の安定度Ha)に基づいて、自律航法制御処理部4による測定動作、例えば、自律航法の測位結果である位置データを算出する時間間隔等を制御しても良い。
このように、動作制御部6は、精度算出部5の第1算出部5aにより算出された測位精度(安定度Ha)に基づいて、GPS受信部1及び自律航法制御処理部4の少なくとも一方の測定動作を制御する制御手段を構成している。
【0023】
現在位置特定部7は、当該装置本体の現在位置を特定する。
即ち、現在位置特定部7は、GPS受信部1及び自律航法制御処理部4による測定結果に基づいて、当該装置本体の現在位置を特定する。具体的には、現在位置特定部7は、精度算出部5により算出された装置本体の保持状態の安定度Haが所定値(例えば、0.9)以上であるか否かに応じて、GPS受信部1及び自律航法制御処理部4のそれぞれの測定結果のうちで当該装置本体の現在位置の特定に利用する測定結果を変化させる。例えば、現在位置特定部7は、安定度Haが「Ha≧0.9」であると判定されると、自律航法制御処理部4による測定結果を利用して当該装置本体の現在位置を特定する一方で、安定度Haが「Ha≧0.9」でない(即ち、「Ha<0.9」である)と判定されると、GPS受信部1による測定結果を利用して当該装置本体の現在位置を特定する。
また、現在位置特定部7は、当該装置本体の現在位置を逐次特定することで、ユーザ(装置本体)の移動軌跡を表わす一連の位置データを逐次生成して、所定の記憶手段(例えば、プログラムメモリ11等)に記録させる。
【0024】
このように、現在位置特定部7は、動作制御部6により各々の測定動作が制御されるGPS受信部1及び自律航法制御処理部4による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段を構成している。
【0025】
操作入力部8は、ユーザによる所定操作に基づいて、当該測位装置本体に対して各種指示を入力する。具体的には、操作入力部8は、例えば、電源ボタン、上下左右のカーソルボタン、決定ボタン(何れも図示略)等を備えている。
【0026】
表示部9は、例えば、液晶表示パネルであり、ワークメモリ10に一時的に記憶されている各種の情報や画像等の表示用の画像データを読み出して表示画面に表示する。
【0027】
ワークメモリ10は、例えば、DRAM(Dynamic Random Access Memory)等により構成され、中央制御部12等によって処理されるデータ等を一時的に記憶する。
プログラムメモリ11は、中央制御部12のCPUの動作に必要な各種プログラムやデータを記憶している。
【0028】
中央制御部12は、測位装置100の各部を統括的に制御する。具体的には、中央制御部12は、図示は省略するが、CPU(Central Processing Unit)等を備え、測位装置100用の各種処理プログラムに従って各種の制御動作を行い、必要に応じてその制御動作の結果を表示部9に表示させる。
【0029】
次に、測位装置100による測位処理について図2〜図4を参照して説明する。
図2及び図3は、測位処理に係る動作の一例を示すフローチャートである。
なお、以下の測位処理にあっては、予め、装置本体の3軸加速度センサ3が重力軸以外で回転していない静止状態における、基準となる各軸の検出信号の0Hzの周波数成分(X0,Y0,Z0)が抽出されて所定の記憶手段(例えば、ワークメモリ10等)に格納されているものとする。
【0030】
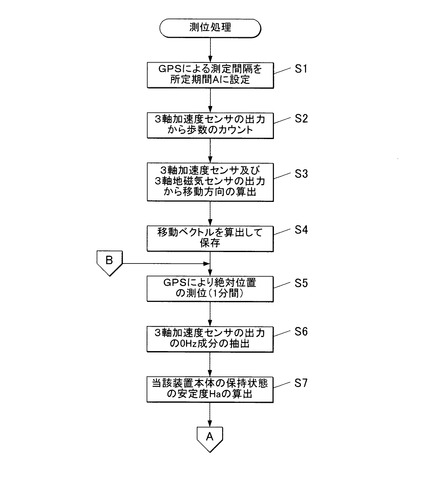
図2に示すように、先ず、動作制御部6は、GPS受信部1により当該装置本体の絶対的な現在位置(緯度、経度)に係る位置情報を取得するGPS測位を間欠的に行うために、当該GPS受信部1による測定期間を所定期間(例えば、10分等)に設定(タイマー設定)する(ステップS1)。
そして、動作制御部6は、測定間隔の設定後にタイマによる計時をスタートさせる。
【0031】
次に、自律航法制御処理部4は、3軸地磁気センサ2及び3軸加速度センサ3により検出された検出データに基づいて、自律航法の測位演算を所定の時間間隔毎に連続的に行う(ステップS2〜S4)。
具体的には、自律航法制御処理部4は、所定のサンプリング周期で3軸地磁気センサ2及び3軸加速度センサ3により検出された検出データを取得して、3軸加速度センサ3により検出された検出データに基づいて歩数をカウントし(ステップS2)、3軸加速度センサ3と3軸地磁気センサ2の検出データに基づいて移動方向の方位を算出する(ステップS3)。続けて、自律航法制御処理部4は、歩数と歩幅データから移動量を算出した後、当該移動量と移動方向の方位とから移動ベクトルを算出してワークメモリ10に保存する(ステップS4)。
【0032】
その後、GPS受信部1は、動作制御部6から出力されたGPSによる測位指令の入力に基づいて、当該装置本体の絶対的な現在位置の測位を1分間行う(ステップS5)。
続けて、精度算出部5の第1算出部5aは、3軸加速度センサ3により検出された検出信号の各軸の検出信号の0Hzの周波数成分(xa,ya,za)を抽出した後(ステップS6)、当該装置本体の保持状態の安定度Ha(図4参照)を算出する(ステップS7)。
具体的には、第1算出部5aは、下記式(1)に従って、抽出された所定タイミングにおける0Hzの周波数成分(xa,ya,za)の2乗和の平方根を、基準となる各軸の検出信号の0Hzの周波数成分(X0,Y0,Z0)の2乗和の平方根で除算して、当該装置本体の保持状態の安定度Haを算出する。
【数2】
【0033】
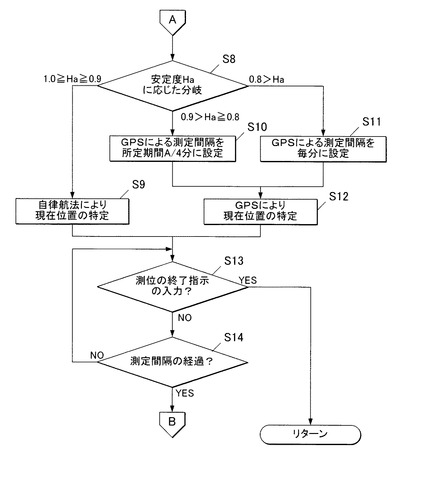
図3に示すように、動作制御部6は、第1算出部5aにより算出された装置本体の保持状態の安定度Haに応じて処理を分岐させる(ステップS8)。
具体的には、動作制御部6は、安定度Haが「1.0≧Ha≧0.9」である場合には、GPS受信部1による絶対的な現在位置に係る位置情報の測定間隔を所定時間A(例えば、10分等)に設定した状態のままとした後、現在位置特定部7は、安定度Haが「Ha≧0.9」であるため、自律航法制御処理部4による測定結果(自律航法測位)を利用して当該装置本体の現在位置を特定する(ステップS9)。
また、動作制御部6は、安定度Haが「0.9>Ha≧0.8」である場合には、GPS受信部1による測定間隔を所定時間A/4(例えば、2.5分等)に設定し(ステップS10)、また、安定度Haが「Ha<0.8」である場合には、GPS受信部1による測定間隔を毎分に設定する(ステップS11)。
その後、現在位置特定部7は、安定度Haが「Ha≧0.9」でないため、GPS受信部1による測定結果(GPS測位)を利用して当該装置本体の現在位置を特定する(ステップS12)。
【0034】
次に、動作制御部6は、ユーザによる操作入力部8の所定操作に基づいて中央制御部12のCPUから測位処理の終了指示が入力されたか否かを判定する(ステップS13)。
ここで、測位処理の終了指示が入力されていないと判定されると(ステップS13;NO)、動作制御部6は、タイマによる計時結果に基づいて、GPS受信部1によるGPS測位の測定間隔が経過したか否かを判定する(ステップS14)。
【0035】
ステップS14にて、GPS測位の測定間隔が経過していないと判定されると(ステップS14;NO)、動作制御部6は、処理をステップS13に戻し、それ以降の処理の実行を制御する。
そして、ステップS14にて、GPS測位の測定間隔が経過したと判定されると(ステップS14;YES)、動作制御部6は、処理をステップS5に戻し、GPSによる測位指令をGPS受信部1に対して出力し、GPS受信部1は、測位指令の入力に基づいて、当該装置本体の絶対的な現在位置の測位を1分間行う(ステップS5)。
【0036】
一方、ステップS13にて、中央制御部12のCPUから測位処理の終了指示が入力されと判定されると(ステップS13;YES)、動作制御部6は、GPS測位と自律航法測位とを併用した当該測位処理を終了させる。
【0037】
以上のように、本実施形態の測位装置100によれば、自律航法制御処理部4による装置本体の相対的な変位の測位精度に基づいて、GPS受信部1及び自律航法制御処理部4の少なくとも一方の測定動作を制御するので、GPS受信部1による測定動作にかかる消費電力を抑えるために自律航法制御処理部4による測定結果を有効に活用する際に、ユーザによる当該装置本体の保持状態と関連付けられる、自律航法制御処理部4による装置本体の相対的な変位の測位精度に基づいて、GPS受信部1及び自律航法制御処理部4の少なくとも一方の測定動作を効率良く制御することができる。そして、当該GPS受信部1及び自律航法制御処理部4による測定結果に基づいて、当該装置本体の現在位置を特定するので、自律航法制御処理部4による測定結果を利用することでGPS受信部1による測定動作にかかる消費電力の抑制を適正に行いつつ、GPS受信部1及び自律航法制御処理部4による測定結果に基づいて、当該装置本体の現在位置の特定を常に正確に行うことができる。
具体的には、自律航法制御処理部4による装置本体の相対的な変位の測位精度に基づいて、GPS受信部1による装置本体の絶対的な位置の測定間隔を変化させる。その結果、例えば、装置本体の保持状態が安定状態で、自律航法制御処理部4による装置本体の相対的な変位の測位精度が十分に高い場合には、自律航法制御処理部4による測定結果を積極的に利用することにより、単位時間あたりのGPS受信部1による測定動作回数を少なくして当該GPS受信部1による測定動作にかかる消費電力を効率良く抑制することができる。また、装置本体の保持状態が不安定な状態となって、自律航法制御処理部4による装置本体の相対的な変位の測位精度が低下した場合には、自律航法測位では進行方向が不明となるため、単位時間あたりのGPS受信部1による測定動作回数を多くしてGPS受信部1による測定結果を積極的に利用することにより当該装置本体の現在位置の特定を正確に行うことができる。
このように、相異なる測位方法を採用しつつ現在位置の特定精度の低下を防止することができる。
【0038】
また、3軸加速度センサ3による検出結果に基づいて、具体的には、3軸加速度センサ3により検出された各軸の検出信号のうち、0Hzの周波数成分の2乗和に基づいて、使用者による当該装置本体の保持状態の安定度を当該装置本体の相対的な変位の測位精度として算出する。その結果、装置本体の保持状態の安定度を利用して当該装置本体の相対的な変位の測位精度の算出を適正に行うことができ、GPS受信部1による測定動作にかかる消費電力の抑制を適正に行いつつ、当該装置本体の現在位置の特定を常に正確に行うことができる。
【0039】
なお、本発明は、上記実施形態に限定されることなく、本発明の趣旨を逸脱しない範囲において、種々の改良並びに設計の変更を行っても良い。
以下に、測位装置100の変形例について説明する。
【0040】
<変形例1>
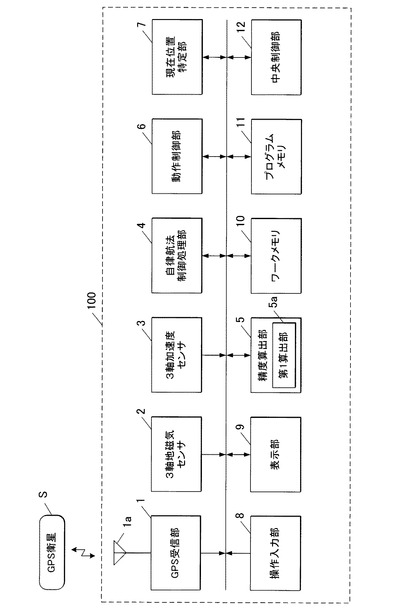
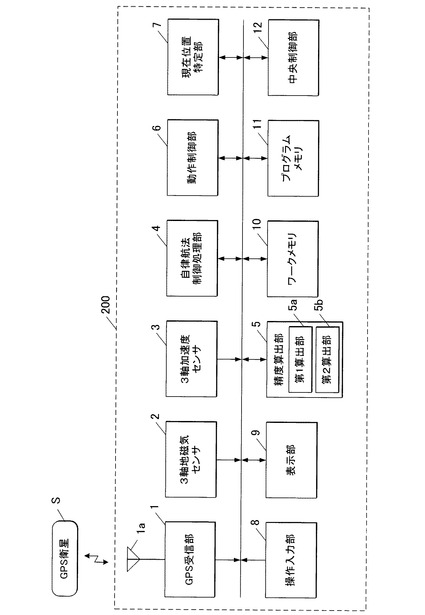
図5は、変形例1の測位装置200の概略構成を示すブロック図である。
この変形例1の測位装置200は、第1算出部5aにより算出された当該装置本体の相対的な変位の測位精度及び第2算出部5bにより算出された当該装置本体の絶対的な位置の測位精度に基づいて、装置本体の現在位置を特定する。
なお、変形例1の測位装置200は、以下に詳細に説明する以外の点で上記実施形態の測位装置100と略同様の構成をなし、詳細な説明は省略する。
【0041】
図5に示すように、測位装置200の精度算出部5は、第1算出部5aに加えて第2算出部5bを具備している。
第2算出部5bは、GPS受信部1による測定結果に基づいて、当該装置本体の絶対的な位置の測位精度を算出する。即ち、第2算出部5bは、GPS受信部1により受信アンテナ1aを介して受信されたGPS信号に基づいて、GST(GNSS Pseudorange Error Statistics)値、C/N(Carrier/Noise)値、DOP(Dilution of Precision)値及びEPE(Estimated Position Error)値のうち、少なくとも何れか一に基づいて、当該装置本体の絶対的な位置の測位精度を算出する。
ここで、第2算出部5bは、GPS受信部1による測定結果に基づいて、当該装置本体の絶対的な位置の測位精度を算出する第2算出手段を構成している。
【0042】
そして、現在位置特定部7は、第1算出部5aにより算出された当該装置本体の相対的な変位の測位精度(安定度Ha)及び第2算出部5bにより算出された当該装置本体の絶対的な位置の測位精度に基づいて、装置本体の現在位置を特定する。
具体的には、現在位置特定部7は、第1算出部5aにより算出された当該装置本体の相対的な変位の測位精度(装置本体の保持状態の安定度Ha)を所定の演算式に基づいて正規化した第1精度情報を算出する。また、現在位置特定部7は、第2算出部5bにより算出された当該装置本体の絶対的な位置の測位精度を所定の演算式に基づいて正規化した第2精度情報を算出する。
そして、現在位置特定部7は、第1精度情報と第2精度情報とを比較判定し、当該判定結果に応じて、GPS受信部1及び自律航法制御処理部4のそれぞれの測定結果のうちで当該装置本体の現在位置の特定に利用する測定結果を変化させる。即ち、現在位置特定部7は、第1精度情報の方が第2精度情報よりも高いと判定されると、自律航法制御処理部4による測定結果を利用して当該装置本体の現在位置を特定する一方で、第1精度情報の方が第2精度情報よりも高くないと判定されると、GPS受信部1による測定結果を利用して当該装置本体の現在位置を特定する。
なお、上記の現在位置特定部7による判定処理は、安定度Haが「0.9>Ha≧0.8」である場合に行われるようになっているが、一例であってこれに限られるものではない。
【0043】
次に、変形例1の測位装置200による測位処理について図2及び図6を参照して説明する。
図6は、測位処理に係る動作の一例を示すフローチャートである。
【0044】
図6に示す測位処理の各処理は、図2の測位処理のステップS1〜S7の各処理に続けて行われる処理である。なお、図2の測位処理のステップS1〜S7の各処理は、上記実施形態の測位処理と同様であり、その詳細な説明は省略する。
【0045】
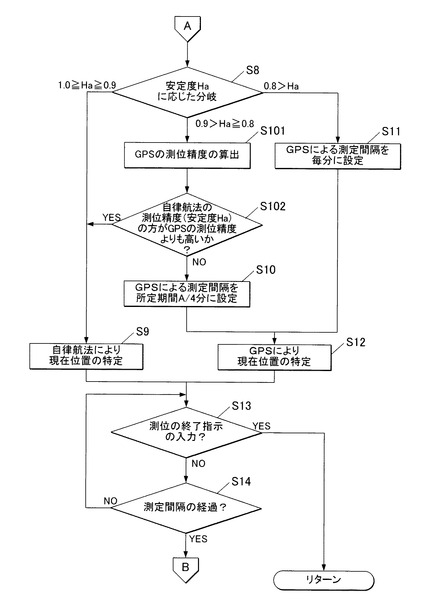
即ち、ステップS7にて、第1算出部5aによる装置本体の保持状態の安定度Ha(図4参照)の算出後(ステップS7)、図6に示すように、上記実施形態の測位処理と同様に、動作制御部6は、第1算出部5aにより算出された装置本体の保持状態の安定度Haに応じて処理を分岐させる(ステップS8)。
具体的には、動作制御部6は、上記実施形態の測位処理と同様に、安定度Haが「1.0≧Ha≧0.9」である場合には、GPS受信部1による絶対的な現在位置に係る位置情報の測定間隔を所定時間A(例えば、10分等)に設定した状態のままとし、現在位置特定部7は、安定度Haが「Ha≧0.9」であるため、自律航法制御処理部4による測定結果(自律航法測位)を利用して当該装置本体の現在位置を特定する(ステップS9)。
【0046】
また、動作制御部6は、上記実施形態の測位処理と同様に、安定度Haが「Ha<0.8」である場合には、GPS受信部1による測定間隔を毎分に設定した後(ステップS11)、現在位置特定部7は、GPS受信部1による測定結果(GPS測位)を利用して当該装置本体の現在位置を特定する(ステップS12)。
【0047】
また、安定度Haが「0.9>Ha≧0.8」である場合には、精度算出部5の第2算出部5bは、GPS受信部1による測定結果に基づいて、当該装置本体の絶対的な位置の測位精度を算出する(ステップS101)。具体的には、第2算出部5bは、GPS受信部1により受信アンテナ1aを介して受信されたGPS信号に基づいて、GST値、C/N値、DOP値及びEPE値のうち、少なくとも一に基づいて、当該装置本体の絶対的な位置の測位精度を算出する。
続けて、現在位置特定部7は、自律航法の測位精度の方がGPSの測位精度よりも高いか否かを判定する(ステップS102)。具体的には、現在位置特定部7は、第1算出部5aにより算出された当該装置本体の保持状態の安定度Haを所定の演算式に基づいて正規化した第1精度情報を算出した後、第2算出部5bにより算出された当該装置本体の絶対的な位置の測位精度を所定の演算式に基づいて正規化した第2精度情報を算出する。その後、現在位置特定部7は、第1精度情報と第2精度情報とを比較判定することにより自律航法の測位精度の方がGPSの測位精度よりも高いか否かを判定する。
【0048】
ステップS102にて、自律航法の測位精度の方がGPSの測位精度よりも高くないと判定されると(ステップS102;NO)、動作制御部6は、上記実施形態の測位処理と同様に、GPS受信部1による測定間隔を所定時間A/4(例えば、2.5分等)に設定する(ステップS10)。その後、処理をステップS12に移行して、現在位置特定部7は、上記実施形態の測位処理と同様に、GPS受信部1による測定結果(GPS測位)を利用して当該装置本体の現在位置を特定する(ステップS12)。
一方、ステップS102にて、自律航法の測位精度の方がGPSの測位精度よりも高いと判定されると(ステップS102;YES)、処理をステップS9に移行して、現在位置特定部7は、自律航法制御処理部4による測定結果(自律航法測位)を利用して当該装置本体の現在位置を特定する(ステップS9)。つまり、安定度Haが「Ha≧0.9」ではないものの、自律航法の測位精度が比較的高いと考えられるため、現在位置特定部7は、当該装置本体の現在位置の特定に自律航法測位を利用する。
【0049】
その後、中央制御部12のCPUは、処理をステップS13に移行して、上記実施形態の測位処理と同様に、それ以降の処理の実行を制御する。
【0050】
従って、変形例1の測位装置200によれば、第1算出部5aにより算出された当該装置本体の相対的な変位の測位精度(安定度Ha)及び第2算出部5bにより算出された当該装置本体の絶対的な位置の測位精度を利用して、GPS受信部1及び自律航法制御処理部4の各々による測定結果のうち、何れを利用して当該装置本体の現在位置を特定すべきかを判定することができる。例えば、装置本体の保持状態が安定状態ではないものの、自律航法制御処理部4による装置本体の相対的な変位の測位精度が比較的高い場合には、自律航法制御処理部4による測定結果を積極的に利用することにより、単位時間あたりのGPS受信部1による測定動作回数を少なくして当該GPS受信部1による測定動作にかかる消費電力を効率良く抑制することができる。これにより、GPS受信部1による測定動作にかかる消費電力の抑制を適正に行いつつ、当該装置本体の現在位置の特定を常に正確に行うことができる。
【0051】
また、GST値、C/N値、DOP値及びEPE値のうち、少なくとも何れか一に基づいて、当該装置本体の絶対的な位置の測位精度を算出するので、GST値、C/N値、DOP値及びEPE値のうち、少なくとも一を利用して当該装置本体の絶対的な位置の測位精度の算出を適正に行うことができる。
【0052】
なお、変形例1では、当該装置本体の絶対的な位置の測位精度の算出(ステップS101)及び自律航法の測位精度の方がGPSの測位精度よりも高いか否かの判定(ステップS102)の各処理を、GPS受信部1による測定間隔を所定時間A/4に設定する前に行うようにしたが、上記の各処理の実行タイミングは一例であってこれに限られるものではなく、適宜任意に変更可能であり、GPS受信部1による測定間隔を所定時間A/4に設定した後に行っても良い。
【0053】
また、変形例1では、当該装置本体の保持状態の安定度Haが「0.9>Ha≧0.8」である場合に、第1精度情報と第2精度情報とを比較判定することにより自律航法の測位精度の方がGPSの測位精度よりも高いか否かを判定するようにしたが、安定度Haの値に拘わらず、第1精度情報と第2精度情報との比較判定を行って、当該判定結果に基づいて、GPS受信部1及び自律航法制御処理部4の各々による測定結果のうち、何れを利用して当該装置本体の現在位置を特定すべきかを判定するようにしても良い。
【0054】
また、測位装置100、200の構成は、上記実施形態に例示したものは一例であり、これに限られるものではない。
【0055】
加えて、上記実施形態にあっては、第1測位手段、第2測位手段、第1算出手段、制御手段、特定手段としての機能を、中央制御部12の制御下にて、GPS受信部1、自律航法制御処理部4、第1算出部5a、動作制御部6、現在位置特定部7が駆動することにより実現される構成としたが、これに限られるものではなく、中央制御部12によって所定のプログラム等が実行されることにより実現される構成としても良い。
即ち、プログラムを記憶するプログラムメモリ(図示略)に、第1測位処理ルーチン、第2測位処理ルーチン、第1算出処理ルーチン、制御処理ルーチン、特定処理ルーチンを含むプログラムを記憶しておく。そして、第1測位処理ルーチンにより中央制御部12のCPUを、測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段として機能させるようにしても良い。また、第2測位処理ルーチンにより中央制御部12のCPUを、連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段として機能させるようにしても良い。また、第1算出処理ルーチンにより中央制御部12のCPUを、第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段として機能させるようにしても良い。また、制御処理ルーチンにより中央制御部12のCPUを、第1算出手段により算出された測位精度に基づいて、第1測位手段及び第2測位手段の少なくとも一方の測定動作を制御する制御手段として機能させるようにしても良い。また、特定処理ルーチンにより中央制御部12のCPUを、制御手段により測定動作が制御される第1測位手段及び第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段として機能させるようにしても良い。
【0056】
同様に、第2算出手段についても、中央制御部12のCPUによって所定のプログラム等が実行されることにより実現される構成としても良い。
【0057】
さらに、上記の各処理を実行するためのプログラムを格納したコンピュータ読み取り可能な媒体として、ROMやハードディスク等の他、フラッシュメモリ等の不揮発性メモリ、CD−ROM等の可搬型記録媒体を適用することも可能である。また、プログラムのデータを所定の通信回線を介して提供する媒体としては、キャリアウェーブ(搬送波)も適用される。
【0058】
本発明のいくつかの実施形態を説明したが、本発明の範囲は、上述の実施の形態に限定するものではなく、特許請求の範囲に記載された発明の範囲とその均等の範囲を含む。
以下に、この出願の願書に最初に添付した特許請求の範囲に記載した発明を付記する。付記に記載した請求項の項番は、この出願の願書に最初に添付した特許請求の範囲の通りである。
〔付記〕
<請求項1>
使用者によって所持される測位装置であって、
測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段と、
連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段と、
この第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段と、
この第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段及び前記第2測位手段の少なくとも一方の測定動作を制御する制御手段と、
この制御手段により測定動作が制御される前記第1測位手段及び前記第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段と、
を備えることを特徴とする測位装置。
<請求項2>
前記第1算出手段は、
互いに直交する3軸方向の加速度をそれぞれ検出する3軸加速度センサを更に備え、
前記3軸加速度センサによる検出結果に基づいて、使用者による当該装置本体の保持状態の安定度を前記測位精度として算出することを特徴とする請求項1に記載の測位装置。
<請求項3>
前記第1算出手段は、更に、
前記3軸加速度センサにより検出された各軸の検出信号のうち、0Hzの周波数成分の2乗和に基づいて、前記装置本体の保持状態の安定度を算出することを特徴とする請求項2に記載の測位装置。
<請求項4>
前記制御手段は、更に、
前記第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段による前記装置本体の絶対的な位置の測定間隔を変化させることを特徴とする請求項1〜3の何れか一項に記載の測位装置。
<請求項5>
前記第1測位手段による測位結果に基づいて、当該装置本体の絶対的な位置の測位精度を算出する第2算出手段を更に備え、
前記特定手段は、
前記第1算出手段により算出された前記測位精度及び前記第2算出手段により算出された前記測位精度に基づいて、当該装置本体の現在位置を特定することを特徴とする請求項1〜4の何れか一項に記載の測位装置。
<請求項6>
前記第2算出手段は、GST値、C/N値、DOP値及びEPE値のうち、少なくとも何れか一に基づいて、当該装置本体の絶対的な位置の測位精度を算出することを特徴とする請求項5に記載の測位装置。
<請求項7>
使用者によって所持される測位装置を用いた測位方法であって、
測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位処理と、
連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位処理と、
この第2測位処理による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出処理と、
この第1算出処理により算出された前記測位精度に基づいて、前記第1測位処理及び前記第2測位処理の少なくとも一方の測定動作を制御する制御処理と、
この制御処理により測定動作が制御される前記第1測位処理及び前記第2測位処理による測定結果に基づいて、当該装置本体の現在位置を特定する特定処理と、
を行うことを特徴とする測位方法。
<請求項8>
使用者によって所持される測位装置のコンピュータを、
測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段、
連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段、
この第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段、
この第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段及び前記第2測位手段の少なくとも一方の測定動作を制御する制御手段、
この制御手段により測定動作が制御される前記第1測位手段及び前記第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段、
として機能させることを特徴とするプログラム。
【符号の説明】
【0059】
100、200 測位装置
1 GPS受信部
1a 受信アンテナ
2 3軸地磁気センサ
3 3軸加速度センサ
4 自律航法制御処理部
5 精度算出部
5a 第1算出部
5b 第2算出部
6 動作制御部
7 現在位置特定部
12 中央制御部
【技術分野】
【0001】
本発明は、測位装置、測位方法及びプログラムに関する。
【背景技術】
【0002】
従来、GPS(Global Positioning System)衛星からの電波を利用して測位するとともに、各種測位センサを補助的に使用することによりGPS衛星からの電波を受信できない状況であっても自律的に測位を行う測位装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−177772号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記特許文献1等では、GPSによる測位データの精度の判断が、例えば、GST値、C/N値、DOP値及びEPE値等により可能である。一方、自律的な測位に関しては測位誤差(例えば、5%)を一律に当て嵌めて、測位精度の誤差量をを算出しているが、当該装置の保持状態で精度が大きく変動するため、一律な測位誤差では現在位置の特定を正確に行うことができない場合がある。
【0005】
そこで、本発明の課題は、相異なる測位方法を採用しつつ現在位置の特定精度の低下を防止することができる測位装置、測位方法及びプログラムを提供することである。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明の測位装置は、
使用者によって所持される測位装置であって、測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段と、連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段と、この第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段と、この第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段及び前記第2測位手段の少なくとも一方の測定動作を制御する制御手段と、この制御手段により測定動作が制御される前記第1測位手段及び前記第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段と、を備えることを特徴としている。
【0007】
また、本発明の測位方法は、
使用者によって所持される測位装置を用いた測位方法であって、測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位処理と、連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位処理と、この第2測位処理による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出処理と、この第1算出処理により算出された前記測位精度に基づいて、前記第1測位処理及び前記第2測位処理の少なくとも一方の測定動作を制御する制御処理と、この制御処理により測定動作が制御される前記第1測位処理及び前記第2測位処理による測定結果に基づいて、当該装置本体の現在位置を特定する特定処理と、を行うことを特徴としている。
【0008】
また、本発明のプログラムは、
使用者によって所持される測位装置のコンピュータを、測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段、連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段、この第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段、この第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段及び前記第2測位手段の少なくとも一方の測定動作を制御する制御手段、この制御手段により測定動作が制御される前記第1測位手段及び前記第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段、として機能させることを特徴としている。
【発明の効果】
【0009】
本発明によれば、相異なる測位方法を採用しつつ現在位置の特定精度の低下を防止することができる。
【図面の簡単な説明】
【0010】
【図1】本発明を適用した一実施形態の測位装置の概略構成を示すブロック図である。
【図2】図1の測位装置による測位処理に係る動作の一例を示すフローチャートである。
【図3】図2の測位処理の続きに係る動作の一例を示すフローチャートである。
【図4】図1の測位装置本体の保持状態の安定度の変位を模式的に示す図である。
【図5】変形例1の測位装置の概略構成を示すブロック図である。
【図6】図5の測位装置による測位処理に係る動作の一例を示すフローチャートである。
【発明を実施するための形態】
【0011】
以下に、本発明について、図面を用いて具体的な態様を説明する。ただし、発明の範囲は、図示例に限定されない。
本実施形態の測位装置100は、ユーザに携帯所持され、GPS(全地球測位システム)による測位(GPS測位)と、自律航法用センサを用いた測位(自律航法測位)とを併用して、ユーザの移動軌跡を表わす一連の位置データを逐次記録していく装置である。
【0012】
図1は、本発明を適用した一実施形態の測位装置100の概略構成を示すブロック図である。
図1に示すように、測位装置100は、具体的には、GPS受信部1と、3軸地磁気センサ2と、3軸加速度センサ3と、自律航法制御処理部4と、精度算出部5と、動作制御部6と、現在位置特定部7と、操作入力部8と、表示部9と、ワークメモリ10と、プログラムメモリ11と、中央制御部12とを備えている。
【0013】
GPS受信部1は、GPS(全地球測位システム)衛星Sから送信されたデータを受信アンテナ1aを介して受信する。
即ち、受信アンテナ1aは、地球低軌道に打ち上げられた複数のGPS衛星(測位衛星;図1には一つのみ図示)Sから送信されるGPS信号(例えば、アルマナック(概略軌道情報)やエフェメリス(詳細軌道情報)など)を所定のタイミングで受信し、当該GPS信号をGPS受信部1に出力する。GPS受信部1は、受信アンテナ1aを介して受信されるGPS信号の復調処理を行って、GPS衛星Sの各種送信データを取得する。そして、GPS受信部1は、取得された送信データに基づいて、所定の測位演算を行うことで、当該端末本体の絶対的な2次元の現在位置(緯度、経度)を測位して当該位置に係る位置情報(例えば、緯度、経度の座標情報)を測位結果として取得する。
また、GPS受信部1は、動作制御部6により設定された所定の時間間隔毎に、当該装置本体の現在位置に係る位置情報を逐次取得する(詳細後述)。
ここで、GPS受信部1及び受信アンテナ1aは、測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段を構成している。
【0014】
3軸地磁気センサ2は、自律航法用センサであり、互いに直交する3軸方向の地磁気の大きさをそれぞれ検出する。そして、3軸地磁気センサ2は、検出された各軸の検出信号を自律航法制御処理部4に出力する。
【0015】
3軸加速度センサ3は、自律航法用センサであり、互いに直交する3軸方向の加速度をそれぞれ検出する。そして、3軸加速度センサ3は、検出された各軸の検出信号を所定の周波数でサンプリングして、自律航法制御処理部4及び精度算出部5に出力する。
【0016】
自律航法制御処理部4は、3軸地磁気センサ2及び3軸加速度センサ3により検出された検出データに基づいて、自律航法の測位演算を連続的に行う。
即ち、自律航法制御処理部4は、所定のサンプリング周期で3軸地磁気センサ2及び3軸加速度センサ3により検出された検出データを取得して、これらの検出データから測位装置100の移動方向及び移動量を算出していく。さらに、自律航法制御処理部4は、検出データを取得する直前の当該装置本体の存する現在位置の位置データに、算出された移動方向及び移動量からなるベクトルデータを加算することで、自律航法の測位結果である位置データを算出する。また、自律航法制御処理部4は、当該位置データを所定の時間間隔毎に連続して算出することで、当該装置本体の相対的な変位を取得する。
このように、3軸地磁気センサ2、3軸加速度センサ3及び自律航法制御処理部4は、連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段を構成している。
【0017】
精度算出部5は、当該装置本体の相対的な変位の測位精度を算出する第1算出部5aを具備している。
第1算出部5aは、自律航法制御処理部4による測定結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する。即ち、第1算出部5aは、3軸加速度センサ3により検出された検出信号の検出結果に基づいて、ユーザによる当該装置本体の保持状態の安定度Haを測位精度として算出する。ここで、装置本体の保持状態の安定度Haは、当該装置本体が安定状態、即ち、重力軸以外で回転していない状態を基準(Ha=1)として表される。
具体的には、当該装置本体の3軸加速度センサ3が重力軸以外で回転している状態では、加速度の垂直抗力成分が各軸の検出信号の0Hz以外の周波数成分に表れ、一方、3軸加速度センサ3が重力軸以外で回転していない状態では、垂直抗力成分が各軸の検出信号の0Hzの周波数成分に表れることから、この逆方向が重力軸方向となる。そこで、第1算出部5aは、3軸加速度センサ3に対する重力軸方向G(x,y,z)を特定する上で、当該3軸加速度センサ3により検出された各軸の検出信号に対して、平均化フィルタなどの各種のローパスフィルタを施して、0Hzの周波数成分(X0,Y0,Z0)を抽出する。
なお、上記した3軸加速度センサ3の各軸の検出信号の0Hzの周波数成分の抽出方法は、一例であってこれに限られるものではなく、適宜任意に変更可能である。
【0018】
また、第1算出部5aは、3軸加速度センサ3により検出された各軸の検出信号の0Hzの周波数成分(X0,Y0,Z0)の2乗和に基づいて、当該装置本体の保持状態の安定度Haを算出する。
当該装置本体の保持状態とは、例えば、当該装置をユーザのポケットに入れている状態、ユーザが背負うリュックに固定せずに入れている状態、籠に固定せずに入れて自由に移動や回転してしまう状態などがある。
先ず、第1算出部5aは、装置本体の3軸加速度センサ3が重力軸以外で回転していない静止状態にて、基準となる各軸の検出信号の0Hzの周波数成分(X0,Y0,Z0)を抽出しておく。また、第1算出部5aは、所定の時間間隔毎に3軸加速度センサ3により検出された検出信号の各軸の検出信号の0Hzの周波数成分(xa,ya,za)を抽出していく。そして、第1算出部5aは、下記式(1)に従って、所定タイミングにおける0Hzの周波数成分(xa,ya,za)の2乗和の平方根を、基準となる各軸の検出信号の0Hzの周波数成分(X0,Y0,Z0)の2乗和の平方根で除算して、当該装置本体の保持状態の安定度Ha(図4参照)を当該装置本体の相対的な変位の測位精度として算出する。
【数1】
【0019】
このように、精度算出部5は、自律航法制御処理部4による測定結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段を構成している。
【0020】
動作制御部6は、GPS受信部1及び自律航法制御処理部4による測定動作を制御する。
即ち、動作制御部6は、精度算出部5の第1算出部5aにより算出された測位精度(装置本体の保持状態の安定度Ha)に基づいて、GPS受信部1及び自律航法制御処理部4による測定動作を制御する。
ここで、当該装置本体の3軸加速度センサ3が重力軸以外で回転していない静止状態では、第1算出部5aにより算出される装置本体の保持状態の安定度Haは「Ha=1.0」となる。そこで、動作制御部6は、安定度Haが「1.0≧Ha≧0.9」では、移動距離に対する誤差範囲が±5%程度となるため、当該装置本体が所定位置に保持されて静止している状態にほぼ等しい安定状態であると特定し、また、「0.9>Ha≧0.8」では、移動距離に対する誤差範囲が±20%程度となるため、静止していない不安定な状態であると特定し、また、「Ha<0.8」では、誤差範囲が大きく測定不能な状態であると特定する。
なお、安定度Haが「Ha>1.0」では、人為的に重力軸方向に加速度が付加されている状態であると考えられる。
ここで、図4に示す「装置本体の保持状態の安定度Ha」の一例では、例えば、500秒(s)前後までは、安定度Haが「Ha=1.0」であり保持状態が安定状態となっているが、それ以降では、安定度Haの値が大きく変動した状態となっている。
【0021】
そして、動作制御部6は、装置本体の保持状態の安定度Haの判定結果に応じて、GPS受信部1及び自律航法制御処理部4による測定動作を制御する。具体的には、動作制御部6は、安定度Haの判定結果に応じて、GPS受信部1による装置本体の絶対的な位置の測定間隔を変化させる。例えば、動作制御部6は、安定度Haが「1.0≧Ha≧0.9」では、GPS受信部1による位置情報の測定間隔を所定時間A(例えば、10分等)に設定し、また、「0.9>Ha≧0.8」では、GPS受信部1による測定間隔を所定時間A/4(例えば、2.5分等)に設定し、また、「Ha<0.8」では、GPS受信部1による測定間隔を毎分に設定する。
ここで、GPS受信部1による装置本体の絶対的な位置の測定間隔は、図示しないタイマにより計時されるが、当該タイマは、動作制御部6に具備されていても良いし、当該動作制御部6以外の各部、例えば、中央制御部12に具備されていても良い。
【0022】
なお、動作制御部6は、精度算出部5の第1算出部5aにより算出された測位精度(装置本体の保持状態の安定度Ha)に基づいて、自律航法制御処理部4による測定動作、例えば、自律航法の測位結果である位置データを算出する時間間隔等を制御しても良い。
このように、動作制御部6は、精度算出部5の第1算出部5aにより算出された測位精度(安定度Ha)に基づいて、GPS受信部1及び自律航法制御処理部4の少なくとも一方の測定動作を制御する制御手段を構成している。
【0023】
現在位置特定部7は、当該装置本体の現在位置を特定する。
即ち、現在位置特定部7は、GPS受信部1及び自律航法制御処理部4による測定結果に基づいて、当該装置本体の現在位置を特定する。具体的には、現在位置特定部7は、精度算出部5により算出された装置本体の保持状態の安定度Haが所定値(例えば、0.9)以上であるか否かに応じて、GPS受信部1及び自律航法制御処理部4のそれぞれの測定結果のうちで当該装置本体の現在位置の特定に利用する測定結果を変化させる。例えば、現在位置特定部7は、安定度Haが「Ha≧0.9」であると判定されると、自律航法制御処理部4による測定結果を利用して当該装置本体の現在位置を特定する一方で、安定度Haが「Ha≧0.9」でない(即ち、「Ha<0.9」である)と判定されると、GPS受信部1による測定結果を利用して当該装置本体の現在位置を特定する。
また、現在位置特定部7は、当該装置本体の現在位置を逐次特定することで、ユーザ(装置本体)の移動軌跡を表わす一連の位置データを逐次生成して、所定の記憶手段(例えば、プログラムメモリ11等)に記録させる。
【0024】
このように、現在位置特定部7は、動作制御部6により各々の測定動作が制御されるGPS受信部1及び自律航法制御処理部4による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段を構成している。
【0025】
操作入力部8は、ユーザによる所定操作に基づいて、当該測位装置本体に対して各種指示を入力する。具体的には、操作入力部8は、例えば、電源ボタン、上下左右のカーソルボタン、決定ボタン(何れも図示略)等を備えている。
【0026】
表示部9は、例えば、液晶表示パネルであり、ワークメモリ10に一時的に記憶されている各種の情報や画像等の表示用の画像データを読み出して表示画面に表示する。
【0027】
ワークメモリ10は、例えば、DRAM(Dynamic Random Access Memory)等により構成され、中央制御部12等によって処理されるデータ等を一時的に記憶する。
プログラムメモリ11は、中央制御部12のCPUの動作に必要な各種プログラムやデータを記憶している。
【0028】
中央制御部12は、測位装置100の各部を統括的に制御する。具体的には、中央制御部12は、図示は省略するが、CPU(Central Processing Unit)等を備え、測位装置100用の各種処理プログラムに従って各種の制御動作を行い、必要に応じてその制御動作の結果を表示部9に表示させる。
【0029】
次に、測位装置100による測位処理について図2〜図4を参照して説明する。
図2及び図3は、測位処理に係る動作の一例を示すフローチャートである。
なお、以下の測位処理にあっては、予め、装置本体の3軸加速度センサ3が重力軸以外で回転していない静止状態における、基準となる各軸の検出信号の0Hzの周波数成分(X0,Y0,Z0)が抽出されて所定の記憶手段(例えば、ワークメモリ10等)に格納されているものとする。
【0030】
図2に示すように、先ず、動作制御部6は、GPS受信部1により当該装置本体の絶対的な現在位置(緯度、経度)に係る位置情報を取得するGPS測位を間欠的に行うために、当該GPS受信部1による測定期間を所定期間(例えば、10分等)に設定(タイマー設定)する(ステップS1)。
そして、動作制御部6は、測定間隔の設定後にタイマによる計時をスタートさせる。
【0031】
次に、自律航法制御処理部4は、3軸地磁気センサ2及び3軸加速度センサ3により検出された検出データに基づいて、自律航法の測位演算を所定の時間間隔毎に連続的に行う(ステップS2〜S4)。
具体的には、自律航法制御処理部4は、所定のサンプリング周期で3軸地磁気センサ2及び3軸加速度センサ3により検出された検出データを取得して、3軸加速度センサ3により検出された検出データに基づいて歩数をカウントし(ステップS2)、3軸加速度センサ3と3軸地磁気センサ2の検出データに基づいて移動方向の方位を算出する(ステップS3)。続けて、自律航法制御処理部4は、歩数と歩幅データから移動量を算出した後、当該移動量と移動方向の方位とから移動ベクトルを算出してワークメモリ10に保存する(ステップS4)。
【0032】
その後、GPS受信部1は、動作制御部6から出力されたGPSによる測位指令の入力に基づいて、当該装置本体の絶対的な現在位置の測位を1分間行う(ステップS5)。
続けて、精度算出部5の第1算出部5aは、3軸加速度センサ3により検出された検出信号の各軸の検出信号の0Hzの周波数成分(xa,ya,za)を抽出した後(ステップS6)、当該装置本体の保持状態の安定度Ha(図4参照)を算出する(ステップS7)。
具体的には、第1算出部5aは、下記式(1)に従って、抽出された所定タイミングにおける0Hzの周波数成分(xa,ya,za)の2乗和の平方根を、基準となる各軸の検出信号の0Hzの周波数成分(X0,Y0,Z0)の2乗和の平方根で除算して、当該装置本体の保持状態の安定度Haを算出する。
【数2】
【0033】
図3に示すように、動作制御部6は、第1算出部5aにより算出された装置本体の保持状態の安定度Haに応じて処理を分岐させる(ステップS8)。
具体的には、動作制御部6は、安定度Haが「1.0≧Ha≧0.9」である場合には、GPS受信部1による絶対的な現在位置に係る位置情報の測定間隔を所定時間A(例えば、10分等)に設定した状態のままとした後、現在位置特定部7は、安定度Haが「Ha≧0.9」であるため、自律航法制御処理部4による測定結果(自律航法測位)を利用して当該装置本体の現在位置を特定する(ステップS9)。
また、動作制御部6は、安定度Haが「0.9>Ha≧0.8」である場合には、GPS受信部1による測定間隔を所定時間A/4(例えば、2.5分等)に設定し(ステップS10)、また、安定度Haが「Ha<0.8」である場合には、GPS受信部1による測定間隔を毎分に設定する(ステップS11)。
その後、現在位置特定部7は、安定度Haが「Ha≧0.9」でないため、GPS受信部1による測定結果(GPS測位)を利用して当該装置本体の現在位置を特定する(ステップS12)。
【0034】
次に、動作制御部6は、ユーザによる操作入力部8の所定操作に基づいて中央制御部12のCPUから測位処理の終了指示が入力されたか否かを判定する(ステップS13)。
ここで、測位処理の終了指示が入力されていないと判定されると(ステップS13;NO)、動作制御部6は、タイマによる計時結果に基づいて、GPS受信部1によるGPS測位の測定間隔が経過したか否かを判定する(ステップS14)。
【0035】
ステップS14にて、GPS測位の測定間隔が経過していないと判定されると(ステップS14;NO)、動作制御部6は、処理をステップS13に戻し、それ以降の処理の実行を制御する。
そして、ステップS14にて、GPS測位の測定間隔が経過したと判定されると(ステップS14;YES)、動作制御部6は、処理をステップS5に戻し、GPSによる測位指令をGPS受信部1に対して出力し、GPS受信部1は、測位指令の入力に基づいて、当該装置本体の絶対的な現在位置の測位を1分間行う(ステップS5)。
【0036】
一方、ステップS13にて、中央制御部12のCPUから測位処理の終了指示が入力されと判定されると(ステップS13;YES)、動作制御部6は、GPS測位と自律航法測位とを併用した当該測位処理を終了させる。
【0037】
以上のように、本実施形態の測位装置100によれば、自律航法制御処理部4による装置本体の相対的な変位の測位精度に基づいて、GPS受信部1及び自律航法制御処理部4の少なくとも一方の測定動作を制御するので、GPS受信部1による測定動作にかかる消費電力を抑えるために自律航法制御処理部4による測定結果を有効に活用する際に、ユーザによる当該装置本体の保持状態と関連付けられる、自律航法制御処理部4による装置本体の相対的な変位の測位精度に基づいて、GPS受信部1及び自律航法制御処理部4の少なくとも一方の測定動作を効率良く制御することができる。そして、当該GPS受信部1及び自律航法制御処理部4による測定結果に基づいて、当該装置本体の現在位置を特定するので、自律航法制御処理部4による測定結果を利用することでGPS受信部1による測定動作にかかる消費電力の抑制を適正に行いつつ、GPS受信部1及び自律航法制御処理部4による測定結果に基づいて、当該装置本体の現在位置の特定を常に正確に行うことができる。
具体的には、自律航法制御処理部4による装置本体の相対的な変位の測位精度に基づいて、GPS受信部1による装置本体の絶対的な位置の測定間隔を変化させる。その結果、例えば、装置本体の保持状態が安定状態で、自律航法制御処理部4による装置本体の相対的な変位の測位精度が十分に高い場合には、自律航法制御処理部4による測定結果を積極的に利用することにより、単位時間あたりのGPS受信部1による測定動作回数を少なくして当該GPS受信部1による測定動作にかかる消費電力を効率良く抑制することができる。また、装置本体の保持状態が不安定な状態となって、自律航法制御処理部4による装置本体の相対的な変位の測位精度が低下した場合には、自律航法測位では進行方向が不明となるため、単位時間あたりのGPS受信部1による測定動作回数を多くしてGPS受信部1による測定結果を積極的に利用することにより当該装置本体の現在位置の特定を正確に行うことができる。
このように、相異なる測位方法を採用しつつ現在位置の特定精度の低下を防止することができる。
【0038】
また、3軸加速度センサ3による検出結果に基づいて、具体的には、3軸加速度センサ3により検出された各軸の検出信号のうち、0Hzの周波数成分の2乗和に基づいて、使用者による当該装置本体の保持状態の安定度を当該装置本体の相対的な変位の測位精度として算出する。その結果、装置本体の保持状態の安定度を利用して当該装置本体の相対的な変位の測位精度の算出を適正に行うことができ、GPS受信部1による測定動作にかかる消費電力の抑制を適正に行いつつ、当該装置本体の現在位置の特定を常に正確に行うことができる。
【0039】
なお、本発明は、上記実施形態に限定されることなく、本発明の趣旨を逸脱しない範囲において、種々の改良並びに設計の変更を行っても良い。
以下に、測位装置100の変形例について説明する。
【0040】
<変形例1>
図5は、変形例1の測位装置200の概略構成を示すブロック図である。
この変形例1の測位装置200は、第1算出部5aにより算出された当該装置本体の相対的な変位の測位精度及び第2算出部5bにより算出された当該装置本体の絶対的な位置の測位精度に基づいて、装置本体の現在位置を特定する。
なお、変形例1の測位装置200は、以下に詳細に説明する以外の点で上記実施形態の測位装置100と略同様の構成をなし、詳細な説明は省略する。
【0041】
図5に示すように、測位装置200の精度算出部5は、第1算出部5aに加えて第2算出部5bを具備している。
第2算出部5bは、GPS受信部1による測定結果に基づいて、当該装置本体の絶対的な位置の測位精度を算出する。即ち、第2算出部5bは、GPS受信部1により受信アンテナ1aを介して受信されたGPS信号に基づいて、GST(GNSS Pseudorange Error Statistics)値、C/N(Carrier/Noise)値、DOP(Dilution of Precision)値及びEPE(Estimated Position Error)値のうち、少なくとも何れか一に基づいて、当該装置本体の絶対的な位置の測位精度を算出する。
ここで、第2算出部5bは、GPS受信部1による測定結果に基づいて、当該装置本体の絶対的な位置の測位精度を算出する第2算出手段を構成している。
【0042】
そして、現在位置特定部7は、第1算出部5aにより算出された当該装置本体の相対的な変位の測位精度(安定度Ha)及び第2算出部5bにより算出された当該装置本体の絶対的な位置の測位精度に基づいて、装置本体の現在位置を特定する。
具体的には、現在位置特定部7は、第1算出部5aにより算出された当該装置本体の相対的な変位の測位精度(装置本体の保持状態の安定度Ha)を所定の演算式に基づいて正規化した第1精度情報を算出する。また、現在位置特定部7は、第2算出部5bにより算出された当該装置本体の絶対的な位置の測位精度を所定の演算式に基づいて正規化した第2精度情報を算出する。
そして、現在位置特定部7は、第1精度情報と第2精度情報とを比較判定し、当該判定結果に応じて、GPS受信部1及び自律航法制御処理部4のそれぞれの測定結果のうちで当該装置本体の現在位置の特定に利用する測定結果を変化させる。即ち、現在位置特定部7は、第1精度情報の方が第2精度情報よりも高いと判定されると、自律航法制御処理部4による測定結果を利用して当該装置本体の現在位置を特定する一方で、第1精度情報の方が第2精度情報よりも高くないと判定されると、GPS受信部1による測定結果を利用して当該装置本体の現在位置を特定する。
なお、上記の現在位置特定部7による判定処理は、安定度Haが「0.9>Ha≧0.8」である場合に行われるようになっているが、一例であってこれに限られるものではない。
【0043】
次に、変形例1の測位装置200による測位処理について図2及び図6を参照して説明する。
図6は、測位処理に係る動作の一例を示すフローチャートである。
【0044】
図6に示す測位処理の各処理は、図2の測位処理のステップS1〜S7の各処理に続けて行われる処理である。なお、図2の測位処理のステップS1〜S7の各処理は、上記実施形態の測位処理と同様であり、その詳細な説明は省略する。
【0045】
即ち、ステップS7にて、第1算出部5aによる装置本体の保持状態の安定度Ha(図4参照)の算出後(ステップS7)、図6に示すように、上記実施形態の測位処理と同様に、動作制御部6は、第1算出部5aにより算出された装置本体の保持状態の安定度Haに応じて処理を分岐させる(ステップS8)。
具体的には、動作制御部6は、上記実施形態の測位処理と同様に、安定度Haが「1.0≧Ha≧0.9」である場合には、GPS受信部1による絶対的な現在位置に係る位置情報の測定間隔を所定時間A(例えば、10分等)に設定した状態のままとし、現在位置特定部7は、安定度Haが「Ha≧0.9」であるため、自律航法制御処理部4による測定結果(自律航法測位)を利用して当該装置本体の現在位置を特定する(ステップS9)。
【0046】
また、動作制御部6は、上記実施形態の測位処理と同様に、安定度Haが「Ha<0.8」である場合には、GPS受信部1による測定間隔を毎分に設定した後(ステップS11)、現在位置特定部7は、GPS受信部1による測定結果(GPS測位)を利用して当該装置本体の現在位置を特定する(ステップS12)。
【0047】
また、安定度Haが「0.9>Ha≧0.8」である場合には、精度算出部5の第2算出部5bは、GPS受信部1による測定結果に基づいて、当該装置本体の絶対的な位置の測位精度を算出する(ステップS101)。具体的には、第2算出部5bは、GPS受信部1により受信アンテナ1aを介して受信されたGPS信号に基づいて、GST値、C/N値、DOP値及びEPE値のうち、少なくとも一に基づいて、当該装置本体の絶対的な位置の測位精度を算出する。
続けて、現在位置特定部7は、自律航法の測位精度の方がGPSの測位精度よりも高いか否かを判定する(ステップS102)。具体的には、現在位置特定部7は、第1算出部5aにより算出された当該装置本体の保持状態の安定度Haを所定の演算式に基づいて正規化した第1精度情報を算出した後、第2算出部5bにより算出された当該装置本体の絶対的な位置の測位精度を所定の演算式に基づいて正規化した第2精度情報を算出する。その後、現在位置特定部7は、第1精度情報と第2精度情報とを比較判定することにより自律航法の測位精度の方がGPSの測位精度よりも高いか否かを判定する。
【0048】
ステップS102にて、自律航法の測位精度の方がGPSの測位精度よりも高くないと判定されると(ステップS102;NO)、動作制御部6は、上記実施形態の測位処理と同様に、GPS受信部1による測定間隔を所定時間A/4(例えば、2.5分等)に設定する(ステップS10)。その後、処理をステップS12に移行して、現在位置特定部7は、上記実施形態の測位処理と同様に、GPS受信部1による測定結果(GPS測位)を利用して当該装置本体の現在位置を特定する(ステップS12)。
一方、ステップS102にて、自律航法の測位精度の方がGPSの測位精度よりも高いと判定されると(ステップS102;YES)、処理をステップS9に移行して、現在位置特定部7は、自律航法制御処理部4による測定結果(自律航法測位)を利用して当該装置本体の現在位置を特定する(ステップS9)。つまり、安定度Haが「Ha≧0.9」ではないものの、自律航法の測位精度が比較的高いと考えられるため、現在位置特定部7は、当該装置本体の現在位置の特定に自律航法測位を利用する。
【0049】
その後、中央制御部12のCPUは、処理をステップS13に移行して、上記実施形態の測位処理と同様に、それ以降の処理の実行を制御する。
【0050】
従って、変形例1の測位装置200によれば、第1算出部5aにより算出された当該装置本体の相対的な変位の測位精度(安定度Ha)及び第2算出部5bにより算出された当該装置本体の絶対的な位置の測位精度を利用して、GPS受信部1及び自律航法制御処理部4の各々による測定結果のうち、何れを利用して当該装置本体の現在位置を特定すべきかを判定することができる。例えば、装置本体の保持状態が安定状態ではないものの、自律航法制御処理部4による装置本体の相対的な変位の測位精度が比較的高い場合には、自律航法制御処理部4による測定結果を積極的に利用することにより、単位時間あたりのGPS受信部1による測定動作回数を少なくして当該GPS受信部1による測定動作にかかる消費電力を効率良く抑制することができる。これにより、GPS受信部1による測定動作にかかる消費電力の抑制を適正に行いつつ、当該装置本体の現在位置の特定を常に正確に行うことができる。
【0051】
また、GST値、C/N値、DOP値及びEPE値のうち、少なくとも何れか一に基づいて、当該装置本体の絶対的な位置の測位精度を算出するので、GST値、C/N値、DOP値及びEPE値のうち、少なくとも一を利用して当該装置本体の絶対的な位置の測位精度の算出を適正に行うことができる。
【0052】
なお、変形例1では、当該装置本体の絶対的な位置の測位精度の算出(ステップS101)及び自律航法の測位精度の方がGPSの測位精度よりも高いか否かの判定(ステップS102)の各処理を、GPS受信部1による測定間隔を所定時間A/4に設定する前に行うようにしたが、上記の各処理の実行タイミングは一例であってこれに限られるものではなく、適宜任意に変更可能であり、GPS受信部1による測定間隔を所定時間A/4に設定した後に行っても良い。
【0053】
また、変形例1では、当該装置本体の保持状態の安定度Haが「0.9>Ha≧0.8」である場合に、第1精度情報と第2精度情報とを比較判定することにより自律航法の測位精度の方がGPSの測位精度よりも高いか否かを判定するようにしたが、安定度Haの値に拘わらず、第1精度情報と第2精度情報との比較判定を行って、当該判定結果に基づいて、GPS受信部1及び自律航法制御処理部4の各々による測定結果のうち、何れを利用して当該装置本体の現在位置を特定すべきかを判定するようにしても良い。
【0054】
また、測位装置100、200の構成は、上記実施形態に例示したものは一例であり、これに限られるものではない。
【0055】
加えて、上記実施形態にあっては、第1測位手段、第2測位手段、第1算出手段、制御手段、特定手段としての機能を、中央制御部12の制御下にて、GPS受信部1、自律航法制御処理部4、第1算出部5a、動作制御部6、現在位置特定部7が駆動することにより実現される構成としたが、これに限られるものではなく、中央制御部12によって所定のプログラム等が実行されることにより実現される構成としても良い。
即ち、プログラムを記憶するプログラムメモリ(図示略)に、第1測位処理ルーチン、第2測位処理ルーチン、第1算出処理ルーチン、制御処理ルーチン、特定処理ルーチンを含むプログラムを記憶しておく。そして、第1測位処理ルーチンにより中央制御部12のCPUを、測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段として機能させるようにしても良い。また、第2測位処理ルーチンにより中央制御部12のCPUを、連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段として機能させるようにしても良い。また、第1算出処理ルーチンにより中央制御部12のCPUを、第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段として機能させるようにしても良い。また、制御処理ルーチンにより中央制御部12のCPUを、第1算出手段により算出された測位精度に基づいて、第1測位手段及び第2測位手段の少なくとも一方の測定動作を制御する制御手段として機能させるようにしても良い。また、特定処理ルーチンにより中央制御部12のCPUを、制御手段により測定動作が制御される第1測位手段及び第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段として機能させるようにしても良い。
【0056】
同様に、第2算出手段についても、中央制御部12のCPUによって所定のプログラム等が実行されることにより実現される構成としても良い。
【0057】
さらに、上記の各処理を実行するためのプログラムを格納したコンピュータ読み取り可能な媒体として、ROMやハードディスク等の他、フラッシュメモリ等の不揮発性メモリ、CD−ROM等の可搬型記録媒体を適用することも可能である。また、プログラムのデータを所定の通信回線を介して提供する媒体としては、キャリアウェーブ(搬送波)も適用される。
【0058】
本発明のいくつかの実施形態を説明したが、本発明の範囲は、上述の実施の形態に限定するものではなく、特許請求の範囲に記載された発明の範囲とその均等の範囲を含む。
以下に、この出願の願書に最初に添付した特許請求の範囲に記載した発明を付記する。付記に記載した請求項の項番は、この出願の願書に最初に添付した特許請求の範囲の通りである。
〔付記〕
<請求項1>
使用者によって所持される測位装置であって、
測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段と、
連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段と、
この第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段と、
この第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段及び前記第2測位手段の少なくとも一方の測定動作を制御する制御手段と、
この制御手段により測定動作が制御される前記第1測位手段及び前記第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段と、
を備えることを特徴とする測位装置。
<請求項2>
前記第1算出手段は、
互いに直交する3軸方向の加速度をそれぞれ検出する3軸加速度センサを更に備え、
前記3軸加速度センサによる検出結果に基づいて、使用者による当該装置本体の保持状態の安定度を前記測位精度として算出することを特徴とする請求項1に記載の測位装置。
<請求項3>
前記第1算出手段は、更に、
前記3軸加速度センサにより検出された各軸の検出信号のうち、0Hzの周波数成分の2乗和に基づいて、前記装置本体の保持状態の安定度を算出することを特徴とする請求項2に記載の測位装置。
<請求項4>
前記制御手段は、更に、
前記第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段による前記装置本体の絶対的な位置の測定間隔を変化させることを特徴とする請求項1〜3の何れか一項に記載の測位装置。
<請求項5>
前記第1測位手段による測位結果に基づいて、当該装置本体の絶対的な位置の測位精度を算出する第2算出手段を更に備え、
前記特定手段は、
前記第1算出手段により算出された前記測位精度及び前記第2算出手段により算出された前記測位精度に基づいて、当該装置本体の現在位置を特定することを特徴とする請求項1〜4の何れか一項に記載の測位装置。
<請求項6>
前記第2算出手段は、GST値、C/N値、DOP値及びEPE値のうち、少なくとも何れか一に基づいて、当該装置本体の絶対的な位置の測位精度を算出することを特徴とする請求項5に記載の測位装置。
<請求項7>
使用者によって所持される測位装置を用いた測位方法であって、
測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位処理と、
連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位処理と、
この第2測位処理による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出処理と、
この第1算出処理により算出された前記測位精度に基づいて、前記第1測位処理及び前記第2測位処理の少なくとも一方の測定動作を制御する制御処理と、
この制御処理により測定動作が制御される前記第1測位処理及び前記第2測位処理による測定結果に基づいて、当該装置本体の現在位置を特定する特定処理と、
を行うことを特徴とする測位方法。
<請求項8>
使用者によって所持される測位装置のコンピュータを、
測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段、
連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段、
この第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段、
この第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段及び前記第2測位手段の少なくとも一方の測定動作を制御する制御手段、
この制御手段により測定動作が制御される前記第1測位手段及び前記第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段、
として機能させることを特徴とするプログラム。
【符号の説明】
【0059】
100、200 測位装置
1 GPS受信部
1a 受信アンテナ
2 3軸地磁気センサ
3 3軸加速度センサ
4 自律航法制御処理部
5 精度算出部
5a 第1算出部
5b 第2算出部
6 動作制御部
7 現在位置特定部
12 中央制御部
【特許請求の範囲】
【請求項1】
使用者によって所持される測位装置であって、
測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段と、
連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段と、
この第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段と、
この第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段及び前記第2測位手段の少なくとも一方の測定動作を制御する制御手段と、
この制御手段により測定動作が制御される前記第1測位手段及び前記第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段と、
を備えることを特徴とする測位装置。
【請求項2】
前記第1算出手段は、
互いに直交する3軸方向の加速度をそれぞれ検出する3軸加速度センサを更に備え、
前記3軸加速度センサによる検出結果に基づいて、使用者による当該装置本体の保持状態の安定度を前記測位精度として算出することを特徴とする請求項1に記載の測位装置。
【請求項3】
前記第1算出手段は、更に、
前記3軸加速度センサにより検出された各軸の検出信号のうち、0Hzの周波数成分の2乗和に基づいて、前記装置本体の保持状態の安定度を算出することを特徴とする請求項2に記載の測位装置。
【請求項4】
前記制御手段は、更に、
前記第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段による前記装置本体の絶対的な位置の測定間隔を変化させることを特徴とする請求項1〜3の何れか一項に記載の測位装置。
【請求項5】
前記第1測位手段による測位結果に基づいて、当該装置本体の絶対的な位置の測位精度を算出する第2算出手段を更に備え、
前記特定手段は、
前記第1算出手段により算出された前記測位精度及び前記第2算出手段により算出された前記測位精度に基づいて、当該装置本体の現在位置を特定することを特徴とする請求項1〜4の何れか一項に記載の測位装置。
【請求項6】
前記第2算出手段は、GST値、C/N値、DOP値及びEPE値のうち、少なくとも何れか一に基づいて、当該装置本体の絶対的な位置の測位精度を算出することを特徴とする請求項5に記載の測位装置。
【請求項7】
使用者によって所持される測位装置を用いた測位方法であって、
測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位処理と、
連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位処理と、
この第2測位処理による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出処理と、
この第1算出処理により算出された前記測位精度に基づいて、前記第1測位処理及び前記第2測位処理の少なくとも一方の測定動作を制御する制御処理と、
この制御処理により測定動作が制御される前記第1測位処理及び前記第2測位処理による測定結果に基づいて、当該装置本体の現在位置を特定する特定処理と、
を行うことを特徴とする測位方法。
【請求項8】
使用者によって所持される測位装置のコンピュータを、
測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段、
連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段、
この第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段、
この第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段及び前記第2測位手段の少なくとも一方の測定動作を制御する制御手段、
この制御手段により測定動作が制御される前記第1測位手段及び前記第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段、
として機能させることを特徴とするプログラム。
【請求項1】
使用者によって所持される測位装置であって、
測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段と、
連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段と、
この第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段と、
この第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段及び前記第2測位手段の少なくとも一方の測定動作を制御する制御手段と、
この制御手段により測定動作が制御される前記第1測位手段及び前記第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段と、
を備えることを特徴とする測位装置。
【請求項2】
前記第1算出手段は、
互いに直交する3軸方向の加速度をそれぞれ検出する3軸加速度センサを更に備え、
前記3軸加速度センサによる検出結果に基づいて、使用者による当該装置本体の保持状態の安定度を前記測位精度として算出することを特徴とする請求項1に記載の測位装置。
【請求項3】
前記第1算出手段は、更に、
前記3軸加速度センサにより検出された各軸の検出信号のうち、0Hzの周波数成分の2乗和に基づいて、前記装置本体の保持状態の安定度を算出することを特徴とする請求項2に記載の測位装置。
【請求項4】
前記制御手段は、更に、
前記第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段による前記装置本体の絶対的な位置の測定間隔を変化させることを特徴とする請求項1〜3の何れか一項に記載の測位装置。
【請求項5】
前記第1測位手段による測位結果に基づいて、当該装置本体の絶対的な位置の測位精度を算出する第2算出手段を更に備え、
前記特定手段は、
前記第1算出手段により算出された前記測位精度及び前記第2算出手段により算出された前記測位精度に基づいて、当該装置本体の現在位置を特定することを特徴とする請求項1〜4の何れか一項に記載の測位装置。
【請求項6】
前記第2算出手段は、GST値、C/N値、DOP値及びEPE値のうち、少なくとも何れか一に基づいて、当該装置本体の絶対的な位置の測位精度を算出することを特徴とする請求項5に記載の測位装置。
【請求項7】
使用者によって所持される測位装置を用いた測位方法であって、
測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位処理と、
連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位処理と、
この第2測位処理による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出処理と、
この第1算出処理により算出された前記測位精度に基づいて、前記第1測位処理及び前記第2測位処理の少なくとも一方の測定動作を制御する制御処理と、
この制御処理により測定動作が制御される前記第1測位処理及び前記第2測位処理による測定結果に基づいて、当該装置本体の現在位置を特定する特定処理と、
を行うことを特徴とする測位方法。
【請求項8】
使用者によって所持される測位装置のコンピュータを、
測位衛星から送信された信号を受信して、当該装置本体の絶対的な位置を測位する第1測位手段、
連続的に自己の進行方向の動き及び進行方位を検出し、これに基づいて、当該装置本体の相対的な変位を測位する第2測位手段、
この第2測位手段による検出結果に基づいて、当該装置本体の相対的な変位の測位精度を算出する第1算出手段、
この第1算出手段により算出された前記測位精度に基づいて、前記第1測位手段及び前記第2測位手段の少なくとも一方の測定動作を制御する制御手段、
この制御手段により測定動作が制御される前記第1測位手段及び前記第2測位手段による測定結果に基づいて、当該装置本体の現在位置を特定する特定手段、
として機能させることを特徴とするプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−76606(P2013−76606A)
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願番号】特願2011−215935(P2011−215935)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
【公開日】平成25年4月25日(2013.4.25)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
[ Back to top ]