
測位装置、測位方法
【課題】高精度な移動体測位方法を実現する。
【解決手段】移動体測位方法は、慣性センサーデータを用いて測位計算を行って、慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納することと、GPS測位データを用いてGPS測位結果を算出することと、前記GPS測位結果と、前記記憶部に格納され前記GPS測位データが取得された時刻と同じ時刻情報を持つ前記慣性航法測位結果とをカップリングして、位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、を推定することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、前記記憶部に格納された慣性航法測位結果を補正することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、の前記慣性航法測位結果を補正することと、を含む。
【解決手段】移動体測位方法は、慣性センサーデータを用いて測位計算を行って、慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納することと、GPS測位データを用いてGPS測位結果を算出することと、前記GPS測位結果と、前記記憶部に格納され前記GPS測位データが取得された時刻と同じ時刻情報を持つ前記慣性航法測位結果とをカップリングして、位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、を推定することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、前記記憶部に格納された慣性航法測位結果を補正することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、の前記慣性航法測位結果を補正することと、を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測位装置、測位方法に関する。
【背景技術】
【0002】
GPS測位データと慣性センサーデータを融合して、屋内外を問わず高精度な測位を行う場合、GPS測位データは伝送時間および測位計算時間の影響で現在時刻に対して遅延時間が発生してしまうため、GPS測位データと慣性センサーデータとの時刻同期を行う必要がある。GPS測位データと慣性センサーデータとの時刻同期をとる方法としては、GPS測位データが到達した時刻から測位演算時間と伝送時間を差し引いた時刻をGPS基準時刻とし、慣性センサーの検出結果のうちから、基準時刻に最も近い検出結果を同期させるべき検出データと特定し、特定された検出結果の検出時刻とGPS基準時刻の差分を算出し、算出した時間差分をプロパゲーションしてGPS測位データと慣性センサーデータとの時刻同期を行うものが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−222438号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような特許文献1による測位方法では、慣性センサーの測位結果とGPS測位結果とを同期するために、慣性センサーの検出時刻とGPSの基準時刻との差分ΔTpを算出し、外挿法(外挿補間と呼称することがある)により、移動体の速度ベクトルに時間差ΔTpを乗算して、周期iにおいて測位された移動体の位置に積算して、移動体の位置を補正し、センサーの検出結果と対応付けを行う。
補間された移動体の位置は、以下の式で表される。
【0005】
【数1】

このような同期方法では、移動体が加減速で速度の大きさが一定に保たなかったり、回転で速度の方向が変化したりする場合に、外挿法によって補正された移動体の位置は、検出時刻における移動体の真の位置と大きくずれる可能性がある。また、速度や方位の外挿補間は困難であることから、GPS測位結果と慣性センサーの検出結果の同期が取れず、正しくカップリングすることができないという課題があった。
【課題を解決するための手段】
【0006】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0007】
[適用例1]本適用例に係る移動体測位装置は、慣性センサーデータを用いて、測位計算を行って慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納する手段と、GPS測位データを用いたGPS測位結果を算出する手段と、前記GPS測位結果と、前記GPS測位データが取得された時刻と同じ時刻情報を持つ、前記記憶部に格納された前記慣性航法測位結果とのカップリング処理を行う手段と、前記カップリング処理によって得られた位置誤差・姿勢誤差・速度誤差、および前記慣性センサーのバイアス誤差の情報に基づいて、前記記憶部に格納された慣性航法測位結果を補正する手段と、前記位置誤差・姿勢誤差・速度誤差、および前記バイアス誤差の情報に基づいて、前記慣性航法測位結果を補正する手段と、を備えることを特徴とする。
【0008】
本適用例によれば、慣性センサーによる測位計算と同時に、クロックの時刻情報、慣性センサーデータおよび測位結果(加速度、角速度、位置、姿勢、速度)をバッファリングする。GPS測位結果が得られる時点で、GPS測位結果の時刻情報と、バッファーにある慣性センサーの測位結果の時刻情報を比較して、同じ時刻情報を持つGPS測位結果と慣性センサーの測位結果とのカップリングを行い、時刻同期を実現する。また、バッファリングされた慣性センサーの測位結果に、カップリングして推定された誤差情報をフィードバックして、誤差補正(エラー補正)を行うことにより、正しい誤差情報を用いてセンサーデータを再度積分することなく、バッファリングされた慣性センサーの積分結果の誤差を軽減することができる。さらに、カップリングして推定された位置誤差・姿勢誤差・速度誤差、および慣性センサーのバイアス誤差を慣性センサーの現在時刻における測位結果にもフィードバックして誤差補正することによって、現在時刻の正確な測位情報を提供することができる。
【0009】
[適用例2]上記適用例に係る測位装置は、前記カップリング処理が、前記慣性航法測位結果およびGPS測位結果をカルマンフィルタ処理することが好ましい。
【0010】
カルマンフィルターは、時々刻々と変化する外部観測量を利用して確立理論に基づいて系の状態を推定する手法なので、より精度の高い測位結果を出すことができる。
【0011】
[適用例3]上記適用例に係る測位装置は、前記記憶部に格納された慣性航法測位結果を補正する手段は、前記カップリング処理によって得られた誤差情報に基づき、各誤差を予測して補正することが好ましい。
【0012】
GPS測位データが取得された時刻以降の位置の変動を予測して補正するので、より高い精度の測位結果をだすことができる。
【0013】
[適用例4]上記適用例に係る測位装置は、前記慣性センサーデータを用いて測位計算することは、GPS測位データを用いてGPS測位することよりも高頻度で行われること、が好ましい。
【0014】
GPSによる測位計算は、慣性センサーによる測位計算よりも長い時間を必要とすることがあるので、GPS測位の計算中に慣性センサーによる測位で補うことにより、より精度の高い測位結果を出すことができる。
【0015】
[適用例5]上記適用例に係る測位装置は、前記慣性センサーデータは、加速度センサーおよびジャイロセンサーのうち少なくともいずれか一つによって計測されたデータであることが好ましい。
【0016】
少なくとも加速度センサーおよびジャイロセンサーのいずれかによって移動体の移動を捕捉するので、より精度の高い測位結果を出すことができる。
【0017】
[適用例6]本適用例に係る測位方法は、慣性センサーデータを用いて測位計算を行って、慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納することと、GPS測位データを用いてGPS測位結果を算出することと、前記GPS測位結果と、前記記憶部に格納され前記GPS測位データが取得された時刻と同じ時刻情報を持つ前記慣性航法測位結果とをカップリングして、位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、を推定することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、前記記憶部に格納された慣性航法測位結果を補正することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、の前記慣性航法測位結果を補正することと、を含むことを特徴とする。
【0018】
本適用例によれば、慣性センサーデータと慣性センサーの測位結果と時刻情報とをバッファリングし、GPS測位結果の時刻情報と慣性センサーデータの時刻情報とを同期させる。さらに、同期された慣性センサーの測位結果とGPS測位結果とをカップリングして推定される位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、をバッファー部にフィードバックして、バッファリングされた慣性センサーの測位結果を補正することができる。そのため、正しい誤差情報を用いて過去分のセンサーデータを再度積分する必要がなく、計算負荷を大幅に減少することができる。さらに、カップリングして推定された位置誤差・姿勢誤差・速度誤差、および慣性センサーのバイアス誤差を慣性センサーの現在時刻における測位結果にフィードバックし誤差補正することによって、現在時刻の正確な測位情報を移動体に提供することができる。
【図面の簡単な説明】
【0019】
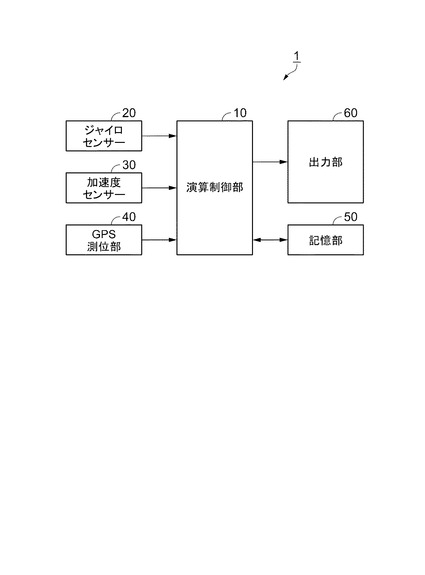
【図1】移動体制御装置の概要を示す構成ブロック図。
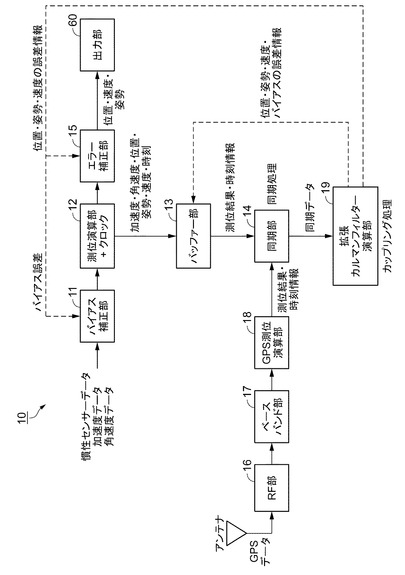
【図2】演算制御部の概要を示すブロック図。
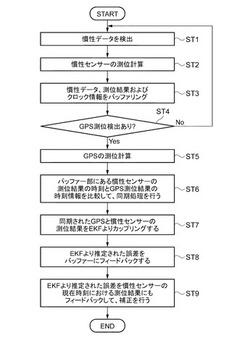
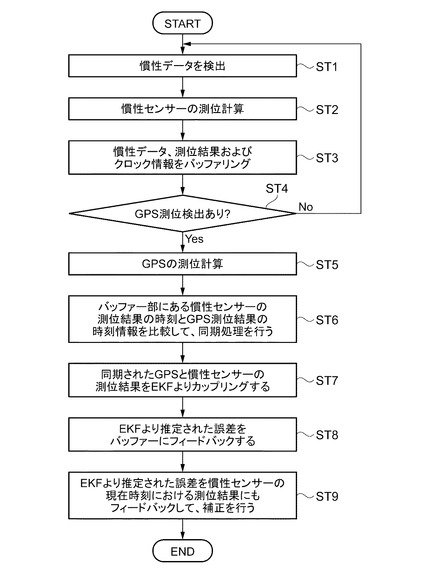
【図3】移動体測位方法の主要工程を示すフローチャート。
【図4】同期処理の方法を示す説明図。
【図5】移動体測位のシミュレーション結果の比較を示し、(a)は、水平方向の移動体の移動、(b)は、高さ方向の移動を表す。
【図6】推定された慣性センサーのバイアス誤差を示し、(a)はバッファリング法による3軸加速度バイアスの推定値、(b)はプロパゲーション法による3軸加速度バイアスの推定値。
【発明を実施するための形態】
【0020】
以下、本発明の実施形態を図面を参照して説明する。
(移動体測位装置)
【0021】
図1は、移動体制御装置の概要を示す構成ブロック図である。移動体制御装置1は、ジャイロセンサー20と、加速度センサー30と、GPS(Global Positioning System)測位部40と、ジャイロセンサー20、加速度センサー30、及びGPS測位部40から入力された測位データを演算処理する演算制御部10と、記憶部50と、を含み、移動体の出力部60に接続されている。
【0022】
ジャイロセンサー20は、移動体に配設され、例えば、水晶の振動型センサーやMEMS(Micro Electro Mechanical Systems)センサーを利用し、微小振動板が回転により受けるコリオリ力に基づき、回転角速度を検出するものである。本実施形態では、各軸まわりの回転角速度を検出するように複数個設けられ、軸まわりの回転角速度を表すデータを出力する。
【0023】
加速度センサー30は、移動体に配設され、少なくとも一つの方向に対する移動体の加速度を測定し出力する。本実施形態では、この加速度センサー30は、水晶の振動型センサーやMEMSセンサーであり、各軸方向への移動体の移動加速度を測定し出力する。
【0024】
GPS測位部40は、GPS衛星からの信号を受信して、移動体の位置(緯度、経度、高度)を表す測位データを出力する。本実施形態で用いられるGPS測位部40は広く用いられているものであるので、ここでの詳細な説明を省略する。
【0025】
演算制御部10は、CPU(Central Processing Unit)等のプログラム制御デバイスを用いて構成され、記憶部50に格納されているプログラムに従って動作する。本実施形態では、この演算制御部10が、ジャイロセンサー20、加速度センサー30やGPS測位部40から出力される各データに基づいて、移動体の位置、速度、姿勢、および慣性センサーのバイアスの各誤差推定と誤差補正を行い、移動体の出力部60に出力する。演算制御部10の具体的な構成と作用については後に詳しく述べる。
【0026】
記憶部50は、RAM(Random Access Memory)等の記憶素子であり、演算制御部10によって実行されるプログラムを保持する。また、この記憶部50は、演算制御部10のワークメモリーとしても動作する。なお、記憶部50は、演算制御部10に内蔵する構成としてもよい。
【0027】
出力部60は、移動体の位置、速度、姿勢を制御する駆動装置、或いは、必要なデータの形態で表示するための表示部等から構成される。
【0028】
次に、演算制御部10の構成について説明する。
図2は、演算制御部の概要を示すブロック図である。演算制御部10は、検出した慣性センサーデータ(加速度データおよび角速度データ)のバイアス誤差を補正するバイアス補正部11と、慣性センサーデータを用いて現在時刻における測位結果を算出する手段としての測位演算部12と、慣性センサーの測位結果の誤差を補正するエラー補正部15と、を有する。測位演算部12によって算出された測位結果には算出された時刻を表す時刻情報が付加される。また、GPS測位結果とGPS時刻情報とバッファー部13に格納されている慣性センサーによる測位結果と時刻情報とを、同期処理する手段としての同期部14が、さらに備えられている。同期処理されたデータには、慣性センサーデータの時刻情報に同期された、慣性センサーデータの測位情報と、GPSデータの測位情報とが含まれ、カップリング処理を行う手段としての拡張カルマンフィルター演算部19に出力される。
【0029】
拡張カルマンフィルター演算部19は、同期処理された慣性センサーデータの測位情報と、GPSデータの測位情報とを用いてカップリング処理を行い、測位結果(位置・姿勢・速度)の誤差、及び慣性センサーのバイアス誤差(加速度バイアス誤差とジャイロバイアス誤差)を拡張カルマンフィルターにより推定し、バイアス補正部11およびバッファー部13にバッフィードバックし、かつエラー補正部15にも出力する。
【0030】
補正手段としてのエラー補正部15は、拡張カルマンフィルター演算部19により推定された位置・姿勢・速度の誤差情報を用いて、現在時刻における慣性センサーの位置・姿勢・速度として補正し出力部60に出力する。
続いて、移動体測位方法について説明する。
(移動体測位方法)
【0031】
図3は、移動体測位方法の主要工程を示すフローチャートである。図2も参照して説明する。まず、慣性センサーによって加速度および角速度を検出し(ST1)、測位演算部12で検出時の現在時刻における測位計算を行う(ST2)。この際、クロックの時刻情報が付加される。次に、検出された慣性データと、算出された測位結果および時刻情報をバッファー部13にバッファリングする(ST3)。
【0032】
慣性データは、100Hz(毎秒100回=10ms間隔)の信号入力であって、ほぼリアルタイムで検出する。GPSデータは1Hz(毎秒1回=1000ms間隔)の信号入力のため、慣性データの信号に対しては間歇的な入力信号であるといえる。よって、GPS測位データが入力されたかを常時検出しており(ST4)、検出なし(No)の場合は、ST1からST3の動作が繰り返される。GPS検出データあり(Yes)と判定した場合には、バッファー部13にバッファリングされている慣性センサーの測位結果および時刻情報と、GPSデータに基づくGPS測位結果及び時刻情報とを比較して同期部14で同期処理を行う(ST6)。同期処理の方法は、図4を参照して説明する。
【0033】
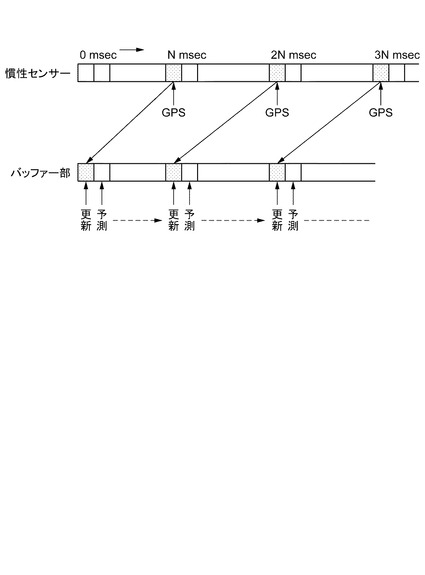
図4は、同期処理の方法を示す説明図である。図の上段は、慣性センサーデータの入力信号を示している。図示は簡略化しているが、慣性センサーデータは100Hzの信号である。GPSデータは1Hzの信号であって、検出信号をアンテナから受信して、アンテナ→RF部16→ベースバンド部17までの伝送遅延、およびベースバンド処理、測位演算の時間等により、GPS測位結果は現在時刻より500msec〜1secも遅れることがある。そこで、遅延のあるGPS測位結果と慣性センサーの測位結果を同期して、現在時刻での測位結果を算出するために、慣性センサーの測位結果のバッファリング処理を行う。
【0034】
慣性センサーでは、慣性センサーの測位計算と同時に、慣性センサーデータおよび測位結果(加速度・角速度・位置・姿勢・速度)と、クロックの時刻情報とをバッファリングする。そして、GPS測位結果が得られた時点(Nmsec、または2Nmsec、または3Nmsec)で、GPS測位結果の時刻情報(衛星信号を受信した時刻)と、バッファリングされている慣性センサーの測位結果の時刻情報とを比較して、同じ時刻情報を有するGPS測位結果と慣性センサーの測位結果を拡張カルマンフィルター演算部19に出力する。例えば、Nmsecの時点でGPS信号を検出したとき、バッファー部内のデータを更新する(矢視)。続いて2Nmsecの時点でGPS信号を検出すると、2Nmsecの時点でバッファー部内のデータを更新する。この際、先にバッファリングされたデータは消去される。Nmsecの更新から2Nmsecの更新までの間は予測期間である。Nmsecの時点でGPS信号が入力されてから2Nmsecまでの期間は、GPS信号が入力されないので、この期間では、Nmsecの信号によって更新されたデータを用いて測位演算を行う。
図3に戻って説明を継続する。
【0035】
同期処理(ST6)後、同期されたGPS測位結果と慣性センサーの測位結果とを、拡張カルマンフィルター演算部(EKF)19によってカップリング処理を行う(ST7)。拡張カルマンフィルター演算部(EKF)19では、位置誤差・姿勢誤差・速度誤差、および慣性センサーのバイアス誤差(ジャイロバイアス誤差・加速度バイアス誤差)の各誤差を推定し、バッファー部13に格納されている慣性センサーの測位結果を書き換える(ST8)。
【0036】
また、拡張カルマンフィルター演算部19によって推定されたバイアス誤差は、バイアス補正部11に、位置誤差・姿勢誤差・速度誤差の情報は、慣性センサーの現在時刻における測位結果にもフィードバックし、エラー補正部15にて位置誤差・姿勢誤差・速度の誤差補正を行い(ST9)、移動体の表示部または駆動装置に出力し、移動体の制御を行う。
(シミュレーション結果)
【0037】
続いて、上述した実施形態の移動体測位方法を用いた場合の移動体測位結果と、従来技術を用いた移動体測位との比較結果について説明する。なお、本実施形態による移動体測位方法をバッファリング法、従来技術による移動体測位方法をプロバゲーション法とし、実際の移動体の移動状態を示す真値と比較する。
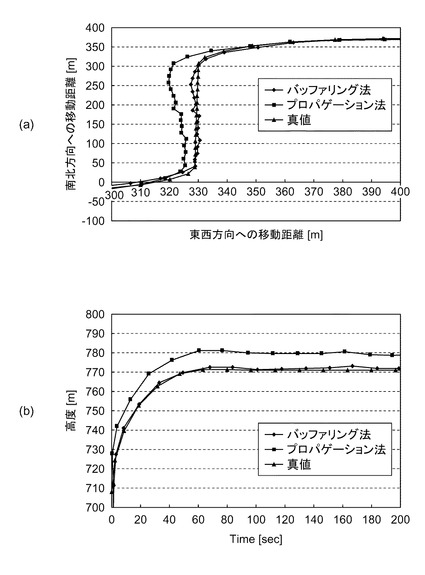
図5は、移動体測位のシミュレーション結果を示すグラフである。図5(a)は、水平方向の移動体の移動を表している。横軸には東西方向への移動距離[m]、縦軸には南北方向の移動距離[m」を表している。図5(a)は真値で表すように、移動体の東方向への移動距離が330[m]付近で北方向に方向転換し、さらに北方向への移動距離が350[m]付近で再び東方向に方向転換した例を表している。図5(a)で表すように、移動体が東方向への移動から北方向に方向転換した時点から、次に東方向に方向転換するまでの間において、プロバゲーション法に対して、バッファリング法では真値により近い測位結果が得られている。バッファリング法はGPS測位データと慣性センサーデータとの同期が実現されたため、プロパゲーション法より真値との誤差が小さいことが明らかである。
【0038】
図5(b)は、高さ方向の移動を表している。横軸には時間(time[sec])、縦軸には高度[m]を表している。図5(b)は真値で表すように、移動体が40[sec」の間に高度770[m]まで移動し、その後水平に移動を継続している例を表している。図5(b)に示すように、時間経過毎の高度変化は、プロバゲーション法ではどの経過時間に対しても高度が高くなる測位結果となっていることに対して、バッファリング法では真値とほぼ一致する測位結果が得られている。
【0039】
次に、推定された慣性センサーのバイアス誤差について説明する。
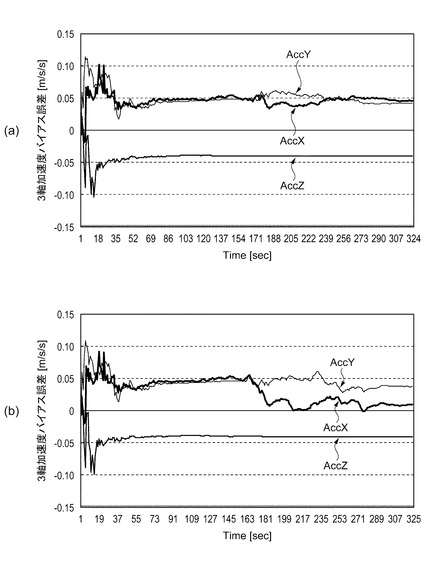
図6は、慣性センサーのバイアス誤差を示すグラフである。具体的には、現在時刻に同期された測位結果・時刻情報を、拡張カルマンフィルターを用いてカップリング処理を行い推定された慣性センサーのバイアス誤差を示している。慣性センサーとしては、3軸加速度センサーを用いた場合を例示しており、水平方向をX軸、Y軸とし、高さ方向をZ軸としたとき、各グラフはX方向加速度(AccX)、Y方向加速度(AccY)、Z方向加速度(AccZ)のバイアス誤差を表している。横軸は経過時間(time[sec])、縦軸はバイアス誤差[m/s/s]である。図6(a)はバッファリング法による3軸加速度バイアスの推定値、図6(b)はプロバゲーション法による3軸加速度バイアスの推定値である。
【0040】
加わった加速度バイアスは、X軸、Y軸では、ほぼ0.04m/s/s、Z軸では、ほぼ−0.04m/s/sである。図6(b)に示す結果から、プロパゲーション法はGPS測位データと慣性センサーの測位データとの同期が取れていない影響でX軸方向の加速度バイアスが170[sec]付近からずれ量が大きくなっている。この位置は、移動体が方向転換した位置であって、方向転換することによりX軸方向の加速度バイアスの推定誤差が大きくなることを示している。一方、図6(a)に示すバッファリング法では、GPS測位データと慣性センサーの測位データとの同期が取れているために、加速度バイアスの推定誤差も小さく、正しく推定されていることが分かる。
【0041】
以上説明したように、バッファリング法によれば、慣性センサーが測位計算を行うと同時に、慣性データおよび測位結果をバッファリングし、GPS測位結果が得られる時点で、GPS測位結果の時刻情報と、バッファー部13にある慣性センサーの測位結果の時刻情報とを比較して、同じ時刻情報を持つGPS測位結果と慣性センサーの測位結果とに同期処理を行い、位置誤差、速度誤差、姿勢誤差、および慣性センサーのバイアス誤差を正しく推定することができる。
【0042】
また、同じ時刻情報を持つGPS測位結果と慣性センサーの測位結果とをカップリング処理をすることによって得られた誤差情報を、慣性センサーの現在時刻における測位結果にもフィードバックして誤差補正を行うことにより、より正確な測位情報をリアルタイムに提供することができる。
【0043】
また、同じ時刻情報を持つGPS測位結果と慣性センサーの測位結果とをカップリング処理をすることによって得られた慣性センサーのバイアス誤差情報を、慣性センサーデータのバイアス補正に利用し、より正確な加速度データ、角速度データを得ることができ、測位結果の精度を向上させることができる。
【0044】
また、同じ時刻情報を持つGPS測位結果と慣性センサーの測位結果とをカップリング処理をすることによって得られた誤差情報を、バッファリングされた慣性センサーの測位結果にもフィードバックして、測位結果の誤差を補正することができる。そのため、正しい誤差情報が得られた時点で、過去分のセンサーデータを再度積分する必要がなく、計算負荷を大幅に減少することができる。
【0045】
ところで、慣性センサーとしては、小型化・軽量化・低コストが可能ではあるが、バイアス誤差およびランダムドリフトが大きいMEMSセンサーがある。このようなMEMSセンサーを用いる場合でも、バッファリング法によれば高精度な移動体の測位が可能である。
【符号の説明】
【0046】
1…移動体測位装置、10…演算制御部、20…ジャイロセンサー、30…加速度センサー、11…バイアス補正部、12…測位演算部、13…バッファー部、14…同期部、15…エラー補正部、16…RF部、17…ベースバンド部、18…GPS測位演算部、19…拡張カルマンフィルター演算部。
【技術分野】
【0001】
本発明は、測位装置、測位方法に関する。
【背景技術】
【0002】
GPS測位データと慣性センサーデータを融合して、屋内外を問わず高精度な測位を行う場合、GPS測位データは伝送時間および測位計算時間の影響で現在時刻に対して遅延時間が発生してしまうため、GPS測位データと慣性センサーデータとの時刻同期を行う必要がある。GPS測位データと慣性センサーデータとの時刻同期をとる方法としては、GPS測位データが到達した時刻から測位演算時間と伝送時間を差し引いた時刻をGPS基準時刻とし、慣性センサーの検出結果のうちから、基準時刻に最も近い検出結果を同期させるべき検出データと特定し、特定された検出結果の検出時刻とGPS基準時刻の差分を算出し、算出した時間差分をプロパゲーションしてGPS測位データと慣性センサーデータとの時刻同期を行うものが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−222438号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような特許文献1による測位方法では、慣性センサーの測位結果とGPS測位結果とを同期するために、慣性センサーの検出時刻とGPSの基準時刻との差分ΔTpを算出し、外挿法(外挿補間と呼称することがある)により、移動体の速度ベクトルに時間差ΔTpを乗算して、周期iにおいて測位された移動体の位置に積算して、移動体の位置を補正し、センサーの検出結果と対応付けを行う。
補間された移動体の位置は、以下の式で表される。
【0005】
【数1】
このような同期方法では、移動体が加減速で速度の大きさが一定に保たなかったり、回転で速度の方向が変化したりする場合に、外挿法によって補正された移動体の位置は、検出時刻における移動体の真の位置と大きくずれる可能性がある。また、速度や方位の外挿補間は困難であることから、GPS測位結果と慣性センサーの検出結果の同期が取れず、正しくカップリングすることができないという課題があった。
【課題を解決するための手段】
【0006】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0007】
[適用例1]本適用例に係る移動体測位装置は、慣性センサーデータを用いて、測位計算を行って慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納する手段と、GPS測位データを用いたGPS測位結果を算出する手段と、前記GPS測位結果と、前記GPS測位データが取得された時刻と同じ時刻情報を持つ、前記記憶部に格納された前記慣性航法測位結果とのカップリング処理を行う手段と、前記カップリング処理によって得られた位置誤差・姿勢誤差・速度誤差、および前記慣性センサーのバイアス誤差の情報に基づいて、前記記憶部に格納された慣性航法測位結果を補正する手段と、前記位置誤差・姿勢誤差・速度誤差、および前記バイアス誤差の情報に基づいて、前記慣性航法測位結果を補正する手段と、を備えることを特徴とする。
【0008】
本適用例によれば、慣性センサーによる測位計算と同時に、クロックの時刻情報、慣性センサーデータおよび測位結果(加速度、角速度、位置、姿勢、速度)をバッファリングする。GPS測位結果が得られる時点で、GPS測位結果の時刻情報と、バッファーにある慣性センサーの測位結果の時刻情報を比較して、同じ時刻情報を持つGPS測位結果と慣性センサーの測位結果とのカップリングを行い、時刻同期を実現する。また、バッファリングされた慣性センサーの測位結果に、カップリングして推定された誤差情報をフィードバックして、誤差補正(エラー補正)を行うことにより、正しい誤差情報を用いてセンサーデータを再度積分することなく、バッファリングされた慣性センサーの積分結果の誤差を軽減することができる。さらに、カップリングして推定された位置誤差・姿勢誤差・速度誤差、および慣性センサーのバイアス誤差を慣性センサーの現在時刻における測位結果にもフィードバックして誤差補正することによって、現在時刻の正確な測位情報を提供することができる。
【0009】
[適用例2]上記適用例に係る測位装置は、前記カップリング処理が、前記慣性航法測位結果およびGPS測位結果をカルマンフィルタ処理することが好ましい。
【0010】
カルマンフィルターは、時々刻々と変化する外部観測量を利用して確立理論に基づいて系の状態を推定する手法なので、より精度の高い測位結果を出すことができる。
【0011】
[適用例3]上記適用例に係る測位装置は、前記記憶部に格納された慣性航法測位結果を補正する手段は、前記カップリング処理によって得られた誤差情報に基づき、各誤差を予測して補正することが好ましい。
【0012】
GPS測位データが取得された時刻以降の位置の変動を予測して補正するので、より高い精度の測位結果をだすことができる。
【0013】
[適用例4]上記適用例に係る測位装置は、前記慣性センサーデータを用いて測位計算することは、GPS測位データを用いてGPS測位することよりも高頻度で行われること、が好ましい。
【0014】
GPSによる測位計算は、慣性センサーによる測位計算よりも長い時間を必要とすることがあるので、GPS測位の計算中に慣性センサーによる測位で補うことにより、より精度の高い測位結果を出すことができる。
【0015】
[適用例5]上記適用例に係る測位装置は、前記慣性センサーデータは、加速度センサーおよびジャイロセンサーのうち少なくともいずれか一つによって計測されたデータであることが好ましい。
【0016】
少なくとも加速度センサーおよびジャイロセンサーのいずれかによって移動体の移動を捕捉するので、より精度の高い測位結果を出すことができる。
【0017】
[適用例6]本適用例に係る測位方法は、慣性センサーデータを用いて測位計算を行って、慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納することと、GPS測位データを用いてGPS測位結果を算出することと、前記GPS測位結果と、前記記憶部に格納され前記GPS測位データが取得された時刻と同じ時刻情報を持つ前記慣性航法測位結果とをカップリングして、位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、を推定することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、前記記憶部に格納された慣性航法測位結果を補正することと、前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、の前記慣性航法測位結果を補正することと、を含むことを特徴とする。
【0018】
本適用例によれば、慣性センサーデータと慣性センサーの測位結果と時刻情報とをバッファリングし、GPS測位結果の時刻情報と慣性センサーデータの時刻情報とを同期させる。さらに、同期された慣性センサーの測位結果とGPS測位結果とをカップリングして推定される位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、をバッファー部にフィードバックして、バッファリングされた慣性センサーの測位結果を補正することができる。そのため、正しい誤差情報を用いて過去分のセンサーデータを再度積分する必要がなく、計算負荷を大幅に減少することができる。さらに、カップリングして推定された位置誤差・姿勢誤差・速度誤差、および慣性センサーのバイアス誤差を慣性センサーの現在時刻における測位結果にフィードバックし誤差補正することによって、現在時刻の正確な測位情報を移動体に提供することができる。
【図面の簡単な説明】
【0019】
【図1】移動体制御装置の概要を示す構成ブロック図。
【図2】演算制御部の概要を示すブロック図。
【図3】移動体測位方法の主要工程を示すフローチャート。
【図4】同期処理の方法を示す説明図。
【図5】移動体測位のシミュレーション結果の比較を示し、(a)は、水平方向の移動体の移動、(b)は、高さ方向の移動を表す。
【図6】推定された慣性センサーのバイアス誤差を示し、(a)はバッファリング法による3軸加速度バイアスの推定値、(b)はプロパゲーション法による3軸加速度バイアスの推定値。
【発明を実施するための形態】
【0020】
以下、本発明の実施形態を図面を参照して説明する。
(移動体測位装置)
【0021】
図1は、移動体制御装置の概要を示す構成ブロック図である。移動体制御装置1は、ジャイロセンサー20と、加速度センサー30と、GPS(Global Positioning System)測位部40と、ジャイロセンサー20、加速度センサー30、及びGPS測位部40から入力された測位データを演算処理する演算制御部10と、記憶部50と、を含み、移動体の出力部60に接続されている。
【0022】
ジャイロセンサー20は、移動体に配設され、例えば、水晶の振動型センサーやMEMS(Micro Electro Mechanical Systems)センサーを利用し、微小振動板が回転により受けるコリオリ力に基づき、回転角速度を検出するものである。本実施形態では、各軸まわりの回転角速度を検出するように複数個設けられ、軸まわりの回転角速度を表すデータを出力する。
【0023】
加速度センサー30は、移動体に配設され、少なくとも一つの方向に対する移動体の加速度を測定し出力する。本実施形態では、この加速度センサー30は、水晶の振動型センサーやMEMSセンサーであり、各軸方向への移動体の移動加速度を測定し出力する。
【0024】
GPS測位部40は、GPS衛星からの信号を受信して、移動体の位置(緯度、経度、高度)を表す測位データを出力する。本実施形態で用いられるGPS測位部40は広く用いられているものであるので、ここでの詳細な説明を省略する。
【0025】
演算制御部10は、CPU(Central Processing Unit)等のプログラム制御デバイスを用いて構成され、記憶部50に格納されているプログラムに従って動作する。本実施形態では、この演算制御部10が、ジャイロセンサー20、加速度センサー30やGPS測位部40から出力される各データに基づいて、移動体の位置、速度、姿勢、および慣性センサーのバイアスの各誤差推定と誤差補正を行い、移動体の出力部60に出力する。演算制御部10の具体的な構成と作用については後に詳しく述べる。
【0026】
記憶部50は、RAM(Random Access Memory)等の記憶素子であり、演算制御部10によって実行されるプログラムを保持する。また、この記憶部50は、演算制御部10のワークメモリーとしても動作する。なお、記憶部50は、演算制御部10に内蔵する構成としてもよい。
【0027】
出力部60は、移動体の位置、速度、姿勢を制御する駆動装置、或いは、必要なデータの形態で表示するための表示部等から構成される。
【0028】
次に、演算制御部10の構成について説明する。
図2は、演算制御部の概要を示すブロック図である。演算制御部10は、検出した慣性センサーデータ(加速度データおよび角速度データ)のバイアス誤差を補正するバイアス補正部11と、慣性センサーデータを用いて現在時刻における測位結果を算出する手段としての測位演算部12と、慣性センサーの測位結果の誤差を補正するエラー補正部15と、を有する。測位演算部12によって算出された測位結果には算出された時刻を表す時刻情報が付加される。また、GPS測位結果とGPS時刻情報とバッファー部13に格納されている慣性センサーによる測位結果と時刻情報とを、同期処理する手段としての同期部14が、さらに備えられている。同期処理されたデータには、慣性センサーデータの時刻情報に同期された、慣性センサーデータの測位情報と、GPSデータの測位情報とが含まれ、カップリング処理を行う手段としての拡張カルマンフィルター演算部19に出力される。
【0029】
拡張カルマンフィルター演算部19は、同期処理された慣性センサーデータの測位情報と、GPSデータの測位情報とを用いてカップリング処理を行い、測位結果(位置・姿勢・速度)の誤差、及び慣性センサーのバイアス誤差(加速度バイアス誤差とジャイロバイアス誤差)を拡張カルマンフィルターにより推定し、バイアス補正部11およびバッファー部13にバッフィードバックし、かつエラー補正部15にも出力する。
【0030】
補正手段としてのエラー補正部15は、拡張カルマンフィルター演算部19により推定された位置・姿勢・速度の誤差情報を用いて、現在時刻における慣性センサーの位置・姿勢・速度として補正し出力部60に出力する。
続いて、移動体測位方法について説明する。
(移動体測位方法)
【0031】
図3は、移動体測位方法の主要工程を示すフローチャートである。図2も参照して説明する。まず、慣性センサーによって加速度および角速度を検出し(ST1)、測位演算部12で検出時の現在時刻における測位計算を行う(ST2)。この際、クロックの時刻情報が付加される。次に、検出された慣性データと、算出された測位結果および時刻情報をバッファー部13にバッファリングする(ST3)。
【0032】
慣性データは、100Hz(毎秒100回=10ms間隔)の信号入力であって、ほぼリアルタイムで検出する。GPSデータは1Hz(毎秒1回=1000ms間隔)の信号入力のため、慣性データの信号に対しては間歇的な入力信号であるといえる。よって、GPS測位データが入力されたかを常時検出しており(ST4)、検出なし(No)の場合は、ST1からST3の動作が繰り返される。GPS検出データあり(Yes)と判定した場合には、バッファー部13にバッファリングされている慣性センサーの測位結果および時刻情報と、GPSデータに基づくGPS測位結果及び時刻情報とを比較して同期部14で同期処理を行う(ST6)。同期処理の方法は、図4を参照して説明する。
【0033】
図4は、同期処理の方法を示す説明図である。図の上段は、慣性センサーデータの入力信号を示している。図示は簡略化しているが、慣性センサーデータは100Hzの信号である。GPSデータは1Hzの信号であって、検出信号をアンテナから受信して、アンテナ→RF部16→ベースバンド部17までの伝送遅延、およびベースバンド処理、測位演算の時間等により、GPS測位結果は現在時刻より500msec〜1secも遅れることがある。そこで、遅延のあるGPS測位結果と慣性センサーの測位結果を同期して、現在時刻での測位結果を算出するために、慣性センサーの測位結果のバッファリング処理を行う。
【0034】
慣性センサーでは、慣性センサーの測位計算と同時に、慣性センサーデータおよび測位結果(加速度・角速度・位置・姿勢・速度)と、クロックの時刻情報とをバッファリングする。そして、GPS測位結果が得られた時点(Nmsec、または2Nmsec、または3Nmsec)で、GPS測位結果の時刻情報(衛星信号を受信した時刻)と、バッファリングされている慣性センサーの測位結果の時刻情報とを比較して、同じ時刻情報を有するGPS測位結果と慣性センサーの測位結果を拡張カルマンフィルター演算部19に出力する。例えば、Nmsecの時点でGPS信号を検出したとき、バッファー部内のデータを更新する(矢視)。続いて2Nmsecの時点でGPS信号を検出すると、2Nmsecの時点でバッファー部内のデータを更新する。この際、先にバッファリングされたデータは消去される。Nmsecの更新から2Nmsecの更新までの間は予測期間である。Nmsecの時点でGPS信号が入力されてから2Nmsecまでの期間は、GPS信号が入力されないので、この期間では、Nmsecの信号によって更新されたデータを用いて測位演算を行う。
図3に戻って説明を継続する。
【0035】
同期処理(ST6)後、同期されたGPS測位結果と慣性センサーの測位結果とを、拡張カルマンフィルター演算部(EKF)19によってカップリング処理を行う(ST7)。拡張カルマンフィルター演算部(EKF)19では、位置誤差・姿勢誤差・速度誤差、および慣性センサーのバイアス誤差(ジャイロバイアス誤差・加速度バイアス誤差)の各誤差を推定し、バッファー部13に格納されている慣性センサーの測位結果を書き換える(ST8)。
【0036】
また、拡張カルマンフィルター演算部19によって推定されたバイアス誤差は、バイアス補正部11に、位置誤差・姿勢誤差・速度誤差の情報は、慣性センサーの現在時刻における測位結果にもフィードバックし、エラー補正部15にて位置誤差・姿勢誤差・速度の誤差補正を行い(ST9)、移動体の表示部または駆動装置に出力し、移動体の制御を行う。
(シミュレーション結果)
【0037】
続いて、上述した実施形態の移動体測位方法を用いた場合の移動体測位結果と、従来技術を用いた移動体測位との比較結果について説明する。なお、本実施形態による移動体測位方法をバッファリング法、従来技術による移動体測位方法をプロバゲーション法とし、実際の移動体の移動状態を示す真値と比較する。
図5は、移動体測位のシミュレーション結果を示すグラフである。図5(a)は、水平方向の移動体の移動を表している。横軸には東西方向への移動距離[m]、縦軸には南北方向の移動距離[m」を表している。図5(a)は真値で表すように、移動体の東方向への移動距離が330[m]付近で北方向に方向転換し、さらに北方向への移動距離が350[m]付近で再び東方向に方向転換した例を表している。図5(a)で表すように、移動体が東方向への移動から北方向に方向転換した時点から、次に東方向に方向転換するまでの間において、プロバゲーション法に対して、バッファリング法では真値により近い測位結果が得られている。バッファリング法はGPS測位データと慣性センサーデータとの同期が実現されたため、プロパゲーション法より真値との誤差が小さいことが明らかである。
【0038】
図5(b)は、高さ方向の移動を表している。横軸には時間(time[sec])、縦軸には高度[m]を表している。図5(b)は真値で表すように、移動体が40[sec」の間に高度770[m]まで移動し、その後水平に移動を継続している例を表している。図5(b)に示すように、時間経過毎の高度変化は、プロバゲーション法ではどの経過時間に対しても高度が高くなる測位結果となっていることに対して、バッファリング法では真値とほぼ一致する測位結果が得られている。
【0039】
次に、推定された慣性センサーのバイアス誤差について説明する。
図6は、慣性センサーのバイアス誤差を示すグラフである。具体的には、現在時刻に同期された測位結果・時刻情報を、拡張カルマンフィルターを用いてカップリング処理を行い推定された慣性センサーのバイアス誤差を示している。慣性センサーとしては、3軸加速度センサーを用いた場合を例示しており、水平方向をX軸、Y軸とし、高さ方向をZ軸としたとき、各グラフはX方向加速度(AccX)、Y方向加速度(AccY)、Z方向加速度(AccZ)のバイアス誤差を表している。横軸は経過時間(time[sec])、縦軸はバイアス誤差[m/s/s]である。図6(a)はバッファリング法による3軸加速度バイアスの推定値、図6(b)はプロバゲーション法による3軸加速度バイアスの推定値である。
【0040】
加わった加速度バイアスは、X軸、Y軸では、ほぼ0.04m/s/s、Z軸では、ほぼ−0.04m/s/sである。図6(b)に示す結果から、プロパゲーション法はGPS測位データと慣性センサーの測位データとの同期が取れていない影響でX軸方向の加速度バイアスが170[sec]付近からずれ量が大きくなっている。この位置は、移動体が方向転換した位置であって、方向転換することによりX軸方向の加速度バイアスの推定誤差が大きくなることを示している。一方、図6(a)に示すバッファリング法では、GPS測位データと慣性センサーの測位データとの同期が取れているために、加速度バイアスの推定誤差も小さく、正しく推定されていることが分かる。
【0041】
以上説明したように、バッファリング法によれば、慣性センサーが測位計算を行うと同時に、慣性データおよび測位結果をバッファリングし、GPS測位結果が得られる時点で、GPS測位結果の時刻情報と、バッファー部13にある慣性センサーの測位結果の時刻情報とを比較して、同じ時刻情報を持つGPS測位結果と慣性センサーの測位結果とに同期処理を行い、位置誤差、速度誤差、姿勢誤差、および慣性センサーのバイアス誤差を正しく推定することができる。
【0042】
また、同じ時刻情報を持つGPS測位結果と慣性センサーの測位結果とをカップリング処理をすることによって得られた誤差情報を、慣性センサーの現在時刻における測位結果にもフィードバックして誤差補正を行うことにより、より正確な測位情報をリアルタイムに提供することができる。
【0043】
また、同じ時刻情報を持つGPS測位結果と慣性センサーの測位結果とをカップリング処理をすることによって得られた慣性センサーのバイアス誤差情報を、慣性センサーデータのバイアス補正に利用し、より正確な加速度データ、角速度データを得ることができ、測位結果の精度を向上させることができる。
【0044】
また、同じ時刻情報を持つGPS測位結果と慣性センサーの測位結果とをカップリング処理をすることによって得られた誤差情報を、バッファリングされた慣性センサーの測位結果にもフィードバックして、測位結果の誤差を補正することができる。そのため、正しい誤差情報が得られた時点で、過去分のセンサーデータを再度積分する必要がなく、計算負荷を大幅に減少することができる。
【0045】
ところで、慣性センサーとしては、小型化・軽量化・低コストが可能ではあるが、バイアス誤差およびランダムドリフトが大きいMEMSセンサーがある。このようなMEMSセンサーを用いる場合でも、バッファリング法によれば高精度な移動体の測位が可能である。
【符号の説明】
【0046】
1…移動体測位装置、10…演算制御部、20…ジャイロセンサー、30…加速度センサー、11…バイアス補正部、12…測位演算部、13…バッファー部、14…同期部、15…エラー補正部、16…RF部、17…ベースバンド部、18…GPS測位演算部、19…拡張カルマンフィルター演算部。
【特許請求の範囲】
【請求項1】
慣性センサーデータを用いて、測位計算を行って慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納する手段と、
GPS測位データを用いたGPS測位結果を算出する手段と、
前記GPS測位結果と、前記GPS測位データが取得された時刻と同じ時刻情報を持つ、前記記憶部に格納された前記慣性航法測位結果とのカップリング処理を行う手段と、
前記カップリング処理によって得られた位置誤差・姿勢誤差・速度誤差、および前記慣性センサーのバイアス誤差の情報に基づいて、前記記憶部に格納された慣性航法測位結果を補正する手段と、
前記位置誤差・姿勢誤差・速度誤差、および前記バイアス誤差の情報に基づいて、前記慣性航法測位結果を補正する手段と、
を備えることを特徴とする測位装置。
【請求項2】
前記カップリング処理が、前記慣性航法測位結果およびGPS測位結果をカルマンフィルタ処理することを特徴とする、
請求項1に記載の測位装置。
【請求項3】
前記記憶部に格納された慣性航法測位結果を補正する手段は、前記記憶部に格納された慣性航法測位結果を補正する手段は、前記カップリング処理によって得られた誤差情報に基づき、各誤差を予測して補正することを特徴とする、
請求項1ないし2のいずれかに記載の測位装置。
【請求項4】
前記慣性センサーデータを用いて測位計算することは、GPS測位データを用いてGPS測位することよりも高頻度で行われることを特徴とする、
請求項1ないし3のいずれか1項に記載の測位装置。
【請求項5】
前記慣性センサーデータは、加速度センサーおよびジャイロセンサーのうち少なくともいずれか一つによって計測されたデータであることを特徴とする、
請求項1ないし4のいずれか1項に記載の測位装置。
【請求項6】
慣性センサーデータを用いて測位計算を行って、慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納することと、
GPS測位データを用いてGPS測位結果を算出することと、
前記GPS測位結果と、前記記憶部に格納され前記GPS測位データが取得された時刻と同じ時刻情報を持つ前記慣性航法測位結果とをカップリングして、位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、を推定することと、
前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、前記記憶部に格納された慣性航法測位結果を補正することと、
前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、の前記慣性航法測位結果を補正することと、
を含むことを特徴とする測位方法。
【請求項1】
慣性センサーデータを用いて、測位計算を行って慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納する手段と、
GPS測位データを用いたGPS測位結果を算出する手段と、
前記GPS測位結果と、前記GPS測位データが取得された時刻と同じ時刻情報を持つ、前記記憶部に格納された前記慣性航法測位結果とのカップリング処理を行う手段と、
前記カップリング処理によって得られた位置誤差・姿勢誤差・速度誤差、および前記慣性センサーのバイアス誤差の情報に基づいて、前記記憶部に格納された慣性航法測位結果を補正する手段と、
前記位置誤差・姿勢誤差・速度誤差、および前記バイアス誤差の情報に基づいて、前記慣性航法測位結果を補正する手段と、
を備えることを特徴とする測位装置。
【請求項2】
前記カップリング処理が、前記慣性航法測位結果およびGPS測位結果をカルマンフィルタ処理することを特徴とする、
請求項1に記載の測位装置。
【請求項3】
前記記憶部に格納された慣性航法測位結果を補正する手段は、前記記憶部に格納された慣性航法測位結果を補正する手段は、前記カップリング処理によって得られた誤差情報に基づき、各誤差を予測して補正することを特徴とする、
請求項1ないし2のいずれかに記載の測位装置。
【請求項4】
前記慣性センサーデータを用いて測位計算することは、GPS測位データを用いてGPS測位することよりも高頻度で行われることを特徴とする、
請求項1ないし3のいずれか1項に記載の測位装置。
【請求項5】
前記慣性センサーデータは、加速度センサーおよびジャイロセンサーのうち少なくともいずれか一つによって計測されたデータであることを特徴とする、
請求項1ないし4のいずれか1項に記載の測位装置。
【請求項6】
慣性センサーデータを用いて測位計算を行って、慣性航法測位結果を算出し、かつ前記慣性航法測位結果に時刻情報を付加して記憶部に格納することと、
GPS測位データを用いてGPS測位結果を算出することと、
前記GPS測位結果と、前記記憶部に格納され前記GPS測位データが取得された時刻と同じ時刻情報を持つ前記慣性航法測位結果とをカップリングして、位置誤差・姿勢誤差・速度誤差と、前記慣性センサーのバイアス誤差と、を推定することと、
前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、前記記憶部に格納された慣性航法測位結果を補正することと、
前記位置誤差・姿勢誤差・速度誤差および前記バイアス誤差に基いて、の前記慣性航法測位結果を補正することと、
を含むことを特徴とする測位方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−185111(P2012−185111A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−49917(P2011−49917)
【出願日】平成23年3月8日(2011.3.8)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月8日(2011.3.8)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]