
測位装置、測位装置の調整方法およびプログラム
【課題】 較正処理の実行時期を判断するためだけに多大な負荷を要することなく、自律航法の測位に必要な較正処理を適切な時期に行うことのできる測位装置、測位装置の調整方法およびプログラムを提供する。
【解決手段】 測位衛星から信号を受信して測位を行う第1測位手段(S1,S2,S8,S9)と、相対的な移動方向および移動量の計測によって測位を行う第2測位手段(S5,S6)と、第2測位手段の連続的な測位により任意の移動過程の位置データが取得され、その後に第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記移動過程の各地点の位置データを補正する補正手段(S11)と、第2測位手段の較正処理を行う較正手段(S14〜S19)と、補正手段の補正量に基づいて較正処理の実行時期を制御する較正時期制御手段(S13)とを備えている。
【解決手段】 測位衛星から信号を受信して測位を行う第1測位手段(S1,S2,S8,S9)と、相対的な移動方向および移動量の計測によって測位を行う第2測位手段(S5,S6)と、第2測位手段の連続的な測位により任意の移動過程の位置データが取得され、その後に第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記移動過程の各地点の位置データを補正する補正手段(S11)と、第2測位手段の較正処理を行う較正手段(S14〜S19)と、補正手段の補正量に基づいて較正処理の実行時期を制御する較正時期制御手段(S13)とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、測位装置、測位装置の調整方法およびプログラムに関する。
【背景技術】
【0002】
従来、GPS(全地球測位システム)測位装置とモーションセンサ(加速度センサ、地磁気センサなど)とを組み合わせて測位を行うことで、移動経路中の各地点の位置データを蓄積していく装置が開発されている。モーションセンサは、GPS衛星の電波が届かない区域でも、相対的な移動量および移動方向を連続的に計測していくことで測位を行うことができる。
【0003】
モーションセンサに使用される地磁気センサは、周囲に配置される磁性体の影響等によりセンサ出力にオフセット誤差が含まれるため、この誤差を除去するために較正処理を行う必要がある。また、測定環境の変化や周囲の磁性体の着磁などにより、使用中にセンサ出力のオフセットが変化することがある。そのため、地磁気センサの較正処理は適当な時期に何度も行う必要がある(例えば特許文献1を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3467797号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
地磁気センサの較正処理をユーザの指示により実行するようにした場合、較正処理が長い期間行われずに測定誤差が大きくなってしまったり、或いは、測定誤差がほとんどないときに較正処理が実行されて、無駄な操作が必要となったり、無駄な消費電力が発生したりするという課題が生じる。
【0006】
また、地磁気センサの較正処理のためだけに、常時或いは一定時間ごとに、センサ出力のオフセットが大きく変化していないか自動的に確認する処理を行うようにした場合、この確認処理自体に多くの演算処理が必要となり、消費電力も増大するという課題が生じる。
【0007】
この発明の目的は、移動量と移動方向を計測して測位を行う構成に対して、較正処理の実行時期を判断するためだけに多大な負荷を要することなく、適宜な時期に較正処理を行うことのできる測位装置、測位装置の調整方法およびプログラムを提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、請求項1記載の発明は、
測位衛星から信号を受信して測位を行う第1測位手段と、
基準地点の位置データと相対的な移動方向および移動量の計測とによって測位を行う第2測位手段と、
前記第2測位手段の連続的な測位により任意の移動過程の各地点の位置データが取得され、その後に前記第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記第2測位手段の測位により取得されている前記移動過程の各地点の位置データを補正する補正手段と、
前記第2測位手段の較正処理を行う較正手段と、
前記補正手段による前記位置データの補正量に基づいて前記較正手段による較正処理の実行時期を制御する較正時期制御手段と、
を備えたことを特徴とする測位装置である。
【0009】
請求項2記載の発明は、請求項1記載の測位装置において、
前記補正手段は、
第1地点から第2地点までの移動過程で、前記第1測位手段により前記第1地点と前記第2地点とで間欠的な測位が行われ、前記第2測位手段の測位により前記第1地点から前記第2地点までの移動過程を通した一連の位置データが取得されている場合に、
前記一連の位置データに対応する移動軌跡を、変化の前後で相似な形状となるように、前記移動軌跡の一端が前記第1測位手段による前記第1地点の測位結果に対応する地点と重なり、前記移動軌跡の他端が前記第1測位手段による前記第2地点の測位結果に対応する地点と重なるように、一様に回転および伸縮させて、前記一連の位置データを変化後の移動軌跡の各地点の位置データへ補正し、
前記較正時期制御手段は、
前記補正手段による前記移動軌跡の回転量、前記移動軌跡の伸縮量、或いは、当該回転量および当該伸縮量の複合量が、所定の範囲を超えている場合に、前記較正手段による較正処理を開始させることを特徴としている。
【0010】
請求項3記載の発明は、請求項1記載の測位装置において、
前記第2測位手段は、
地磁気の向きを検出する地磁気センサと、
加速度を検出する加速度センサと、
を有し、
前記地磁気センサにより検出された地磁気の向きおよび前記加速度センサの出力変動パターンに基づいて移動方向を計測し、前記加速度センサの検出出力から計数された歩数と予め設定された歩幅データとに基づいて移動量を計測し、
前記較正手段は、
前記地磁気センサのオフセットを修正する処理、または、前記歩幅データを修正する処理を行うことを特徴としている。
【0011】
請求項4記載の発明は、請求項3記載の測位装置において、
前記較正手段は、
前記地磁気センサのオフセットを修正する処理を行った後、このオフセットの修正量が所定量に満たない場合に、前記歩幅データを修正する処理を実行することを特徴としている。
【0012】
請求項5記載の発明は、
測位衛星から信号を受信して測位を行う第1測位手段、および、基準地点の位置データと相対的な移動方向および移動量の計測とによって測位を行う第2測位手段を備えた測位装置の調整方法であって、
前記第2測位手段の連続的な測位により任意の移動過程の各地点の位置データが取得され、その後に前記第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記第2測位手段の測位により取得されている前記移動過程の各地点の位置データを補正する補正ステップと、
前記第2測位手段の較正処理を行う較正ステップと、
前記補正ステップによる前記位置データの補正量に基づいて前記較正ステップによる較正処理の実行時期を制御する較正時期制御ステップと、
を含むことを特徴としている。
【0013】
請求項6記載の発明は、請求項5記載の測位装置の調整方法において、
前記補正ステップは、
第1地点から第2地点までの移動過程で、前記第1測位手段により前記第1地点と前記第2地点とで間欠的な測位が行われ、前記第2測位手段の測位により前記第1地点から前記第2地点までの移動過程を通した一連の位置データが取得されている場合に、
前記一連の位置データに対応する移動軌跡を、変化の前後で相似な形状となるように、前記移動軌跡の一端が前記第1測位手段による前記第1地点の測位結果に対応する地点と重なり、前記移動軌跡の他端が前記第1測位手段による前記第2地点の測位結果に対応する地点と重なるように、一様に回転および伸縮させて、前記一連の位置データを変化後の移動軌跡の各地点の位置データへ補正し、
前記較正時期制御ステップは、
前記補正ステップによる前記移動軌跡の回転量、前記移動軌跡の伸縮量、或いは、当該回転量および当該伸縮量の複合量が、所定の範囲を超えている場合に、前記較正ステップによる較正処理を開始させることを特徴としている。
【0014】
請求項7記載の発明は、
測位衛星から信号を受信して測位を行う第1測位手段、および、基準地点の位置データと相対的な移動方向および移動量の計測とによって測位を行う第2測位手段と通信可能にされたコンピュータに、
前記第2測位手段の連続的な測位により任意の移動過程の各地点の位置データが取得され、その後に前記第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記第2測位手段の測位により取得されている前記移動過程の各地点の位置データを補正する補正機能と、
前記第2測位手段の較正処理を行う較正機能と、
前記補正機能による前記位置データの補正量に基づいて前記較正機能による較正処理の実行時期を制御する較正時期制御機能と、
を実現させるプログラムである。
【0015】
請求項8記載の発明は、請求項7記載のプログラムにおいて、
前記補正機能は、
第1地点から第2地点までの移動過程で、前記第1測位手段により前記第1地点と前記第2地点とで間欠的な測位が行われ、前記第2測位手段の測位により前記第1地点から前記第2地点までの移動過程を通した一連の位置データが取得されている場合に、
前記一連の位置データに対応する移動軌跡を、変化の前後で相似な形状となるように、前記移動軌跡の一端が前記第1測位手段による前記第1地点の測位結果に対応する地点と重なり、前記移動軌跡の他端が前記第1測位手段による前記第2地点の測位結果に対応する地点と重なるように、一様に回転および伸縮させて、前記一連の位置データを変化後の移動軌跡の各地点の位置データへ補正し、
前記較正時期制御機能は、
前記補正機能による前記移動軌跡の回転量、前記移動軌跡の伸縮量、或いは、当該回転量および当該伸縮量の複合量が、所定の範囲を超えている場合に、前記較正機能による較正処理を開始させることを特徴としている。
【発明の効果】
【0016】
本発明に従うと、位置データの補正量に基づいて第2測位手段の較正処理の実行時期を判断するので、実行時期を判断するためだけに負荷の大きな処理を行う必要がなく、第2測位手段の較正処理を適宜な時期に実行させることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施形態の測位装置の全体構成を示すブロック図である。
【図2】測位処理で取得される一連の位置データの一例を示す図である。
【図3】自律航法の測位で得られた一連の位置データの補正処理を説明する図である。
【図4】CPUにより実行される測位処理の制御手順を示すフローチャートである。
【図5】補正前後における移動軌跡の伸縮量および回転量を説明する図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施の形態を図面に基づいて説明する。
【0019】
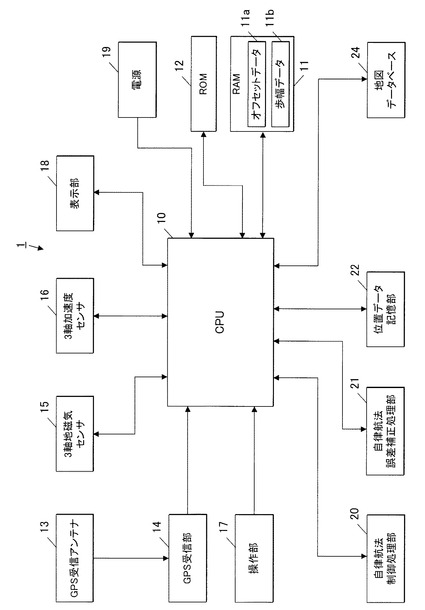
図1は、本発明の実施形態の測位装置の全体構成を示すブロック図である。
【0020】
この実施形態の測位装置1は、移動中に位置の測定を行って移動経路上の各地点の位置データを記録していく装置である。この測位装置1は、ユーザの歩行による移動に対応して自律航法による測位を行えるものである。
【0021】
この測位装置1は、図1に示すように、装置の全体的な制御を行うCPU(中央演算処理装置)10と、CPU10に作業用のメモリ空間を提供するRAM(Random Access Memory)11と、CPU10が実行する制御プログラムや制御データを格納したROM(Read Only Memory)12と、GPS(全地球測位システム)衛星からの送信データを受信するためのGPS受信アンテナ13およびGPS受信部14と、自律航法用センサである3軸地磁気センサ15および3軸加速度センサ16と、複数の操作ボタンを有しユーザから操作指令を入力する操作部17と、各種の情報表示や画像表示を行う表示部18と、各部に動作電圧を供給する電源19と、自律航法用センサ(15,16)の計測データに基づいて自律航法の測位演算を行う自律航法制御処理部20と、自律航法制御処理部20により取得された位置データの補正演算を行う補正手段としての自律航法誤差補正処理部21と、移動経路に沿った一連の位置データが蓄積されていく位置データ記憶部22と、各地点の地図画像データが登録された地図データベース24等を備えている。
【0022】
上記の構成のうち、GPS受信アンテナ13、GPS受信部14およびCPU10により第1測位手段が構成され、3軸地磁気センサ15、3軸加速度センサ16および自律航法制御処理部20により第2測位手段が構成される。
【0023】
GPS受信部14は、CPU10からの動作指令に基づいて、GPS受信アンテナ13を介して受信される信号の復調処理を行って、GPS衛星の各種送信データをCPU10に送る。CPU10は、このGPS衛星の送信データに基づいて所定の測位演算を行うことで、現在位置を表わす位置データを取得することができる。
【0024】
3軸地磁気センサ15は、互いに直行するx軸、y軸、z軸の各方向の磁界の大きさをそれぞれ検出する。3軸加速度センサ16はx軸、y軸、z軸の各方向の加速度の大きさをそれぞれ検出する。
【0025】
自律航法制御処理部20は、CPU10の演算処理を補助するためのものであり、所定のサンプリング周期で3軸地磁気センサ15と3軸加速度センサ16の計測データをCPU10を介して入力し、これらの計測データから測位装置1の移動方向と移動量とを算出していく。さらに、CPU10から供給される基準地点の位置データに、上記算出された移動方向および移動量からなるベクトルデータを積算していくことで、移動地点の位置データを求めてCPU10に出力する。
【0026】
詳細には、自律航法制御処理部20は、3軸加速度センサ16の出力に現れる歩行動作特有の出力変動パターンから移動方向を算出する。歩行時において、ユーザの胴体は前後に大きく傾斜するとともに、左右に小さくローリングする。このとき、測位装置1がユーザの胴体に装着されていると、測位装置1も同様の運動を行うので、この運動が3軸加速度センサ16の出力に現れる。自律航法制御処理部20は、この出力変動パターンを解析することで、ユーザは測位装置1の何れの向きに進行しているのか算出できる。また、3軸加速度センサ16の出力に基づき測位装置1の何れの向きが重力方向なのか求められ、3軸地磁気センサ15の出力に基づき測位装置1の何れの向きが磁北の方向であるのか算出することができる。そして、これらの結果からユーザの移動方向を方位により求めることができる。
【0027】
また、自律航法制御処理部20は、3軸加速度センサ16の出力から測位装置1の上下動の検出を行い、この上下動の検出から歩数をカウントする。そして、予め設定されている歩幅データと歩数とを乗算することで、歩行による移動量を算出する。ここで、歩幅データに誤差があると、移動量の計測結果に一律の計測誤差が付加されることになる。
【0028】
自律航法誤差補正処理部21は、CPU10の演算処理を補助するための演算装置である。この自律航法誤差補正処理部21は、自律航法制御処理部20により算出されて位置データ記憶部22に記憶されている一連の位置データを、間欠的なGPS測位が行われた際に、このGPS測位により取得された位置データに基づいて、より正確な位置データに補正する演算処理を行うものである。この補正処理の具体例については後に詳述する。
【0029】
位置データ記憶部22は、例えばRAMまたは不揮発性メモリなどにより構成され、装置移動中の測位によって取得された位置データが順次登録されるものである。位置データには、例えば、その取得順序を表わすインデックスナンバー「No.」と、位置データが補正済みのものか否かを表わす補正フラグ等が、それぞれ記憶時に付加される。
【0030】
RAM11には、3軸地磁気センサ15のセンサ出力のオフセットを表わすオフセットデータが記憶されるオフセット記憶領域11aと、移動量を計算するのに使用される歩幅データが記憶される歩幅データ記憶領域11b等が設けられている。
【0031】
ROM12には、自律航法による測位とGPSによる測位とを併用して移動過程の各地点の位置データを取得していく測位制御処理のプログラムが格納されている。このプログラムは、ROM12に格納するほか、例えば、データ読取装置を介してCPU10が読み取り可能な、例えば、光ディスク等の可搬型記憶媒体、フラッシュメモリ等の不揮発性メモリに格納しておくことが可能である。また、このようなプログラムをキャリアウェーブ(搬送波)を媒体として通信回線を介して測位装置1にダウンロードされる形態を適用することもできる。
【0032】
次に、上記構成の測位装置1において実行される第1実施形態の測位制御処理について説明する。
【0033】
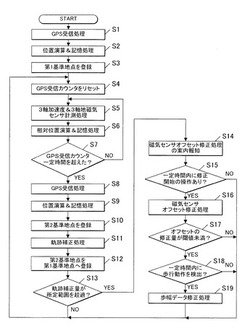
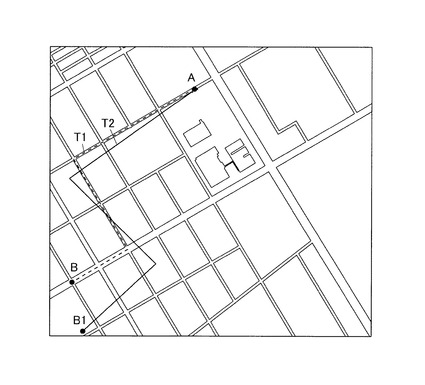
図2には、測位制御処理の測位処理で取得される一連の位置データの一例を表わした図を示す。図4には、CPU10により実行される測位制御処理のフローチャートを示す。
【0034】
[測位処理]
測位制御処理では、GPSによる測位を間欠的に行うとともに、このGPSの測位の間に自律航法による測位を連続的に行って移動過程の各地点の位置データを記憶していく。図2の例では、地点Aから地点Bまで移動した場合において、破線により実際の移動経路T1を、実線により自律航法による測位結果の移動軌跡T2を、それぞれ表わしている。始点の地点AでGPSによる1回目の測位が行われた後、地点Aから地点Bの移動過程で自律航法の測位が連続的に行われて移動軌跡T2に表わされる一連の位置データが取得され、その後、地点BでGPSによる2回目の測位が行われている。
【0035】
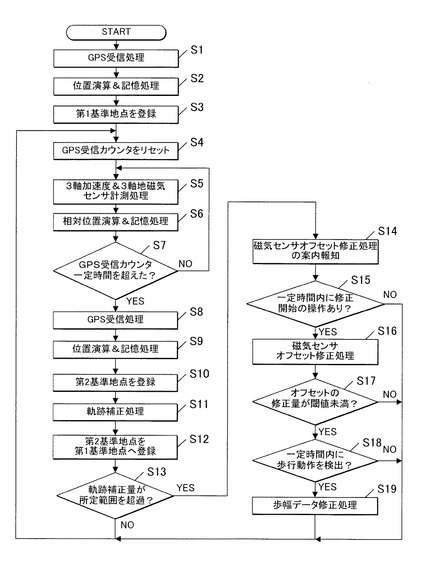
このような測位処理は、図4のフローチャートにおいて、主にステップS1〜S9により実現される。すなわち、測位処理が開始されると、CPU10は、先ず、GPS受信アンテナ13とGPS受信部14とを介してGPS衛星の信号を受信する(ステップS1)。そして、所定の測位演算を行って位置データを算出し、これを測位時刻のデータ等とともに位置データ記憶部22に記憶させる(ステップS2)。図2の地点AのGPSの測位がこれらの処理により遂行されている。
【0036】
続いて、このGPSの測位結果を自律航法の測位の始点となる第1基準地点の位置データとして登録し(ステップS3)、次に、GPSの測位を行う時間をカウントするGPS受信カウンタをリセットする(ステップS4)。そして、続くステップS5〜S7のループ処理により、3軸加速度センサ16と3軸地磁気センサ15とのセンサ出力のサンプリングデータを読み込む処理(ステップS5)と、自律航法による測位を行って位置データを測位時刻のデータ等とともに位置データ記憶部22に記憶させる処理(ステップS6)とを、GPS受信カウンタが一定時間を超えたか判別して(ステップS7)、超えるまで繰り返す。図2の地点A〜地点Bの移動過程の測位がこれらのループ処理により遂行されている。
【0037】
ステップS6の測位処理においては、CPU10がステップS5で読み込んだサンプリングデータを自律航法制御処理部20に送り、自律航法制御処理部20により相対的な移動方向および移動量の測定を行って測位地点の位置データを算出する。3軸地磁気センサ15のセンサ出力を読み込む際には、RAM11の記憶領域11aのオフセットデータが使用されてセンサ出力からオフセットを除去する処理が行われる。また、相対的な移動量を算出する際には、RAM11の記憶領域11bの歩幅データが使用される。
【0038】
ステップS7の位置データの記憶処理においては、位置データが未補正であることを示す補正フラグが付加されて記憶される。
【0039】
一方、ステップS7の判別処理で、GPS受信カウンタの計数値が一定時間を超えていると判別されたら、間欠的なGPSの測位の処理へ移行する。すなわち、CPU10は、GPS受信アンテナ13とGPS受信部14とを介してGPS衛星の信号を受信し(ステップS8)、所定の測位演算を行って位置データを算出するとともに、この位置データを測位時刻のデータ等とともに位置データ記憶部22に記憶させる(ステップS9)。図2の地点BのGPSの測位がこれらの処理により遂行されている。
【0040】
そして、後述するステップS10〜S13或いはステップS10〜S19の処理を挟んでステップS4に戻り、ステップS4からの処理が繰り返されることで、上記の間欠的なGPSによる測位と、その間の連続的な自律航法の測位とが繰り返し実行されて、移動経路の各地点の位置データが取得されるようになっている。
【0041】
[補正処理]
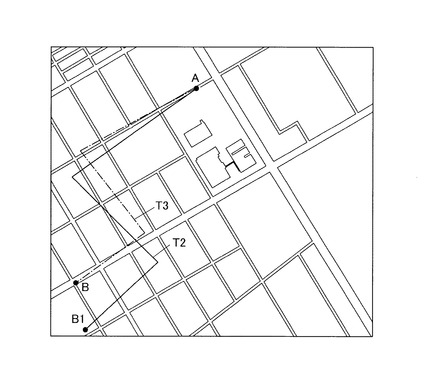
図3には、自律航法の測位で得られた一連の位置データの補正処理を説明する図を示す。同図中、実線により自律航法の測位で得られた一連の位置データの移動軌跡T2を、一点鎖線により補正後の位置データの移動軌跡T3を、それぞれ表わしている。
【0042】
上記のステップS8,S9で間欠的なGPSの測位処理を行ったら、続いて、CPU10は、このGPSの測位が行われた地点(例えば地点B)を第2基準地点として登録する(ステップS10)。そして、前回のGPSの測位が行われた第1基準地点(例えば地点A)から直前までに自律航法の測位で得られた一連の位置データ(例えば移動軌跡T2の位置データ)の補正処理を行う(ステップS11:補正手段)。
【0043】
ステップS11の補正処理においては、CPU10は、上記の一連の位置データが示す移動軌跡(例えば移動軌跡T2)を、第1基準地点(例えば地点A)と重なる一端部を固定したまま、他端部が第2基準地点(例えば地点B)と重なるように、一様に拡大又は縮小ならびに回転させて補正後の移動軌跡(例えば移動軌跡T3)を作成する。つまり、補正前の移動軌跡(T2)と補正後の移動軌跡(T3)とが相似になるように変形させる。そして、この補正後の移動軌跡(T3)上に移動された各測位地点の位置データを補正後の位置データとして補正する。自律航法誤差補正処理部21は、上記の移動軌跡を変形させる演算処理を行って補正後の一連の位置データを算出する。
【0044】
上記補正後の一連の位置データは、例えば、位置データ記憶部22の補正前の位置データに上書きされて記憶される。その際、位置データが補正済みであることを示す補正フラグが付加されて記憶される。
【0045】
このような補正処理により、自律航法の測位の際に、移動量の計測値や移動方向の計測値に一律の誤差が含まれているような場合に、これらの誤差を有効に除去することができる。図2と図3の例において、補正後の位置データの移動軌跡T3は補正前の移動軌跡T2よりも実際の移動経路T1に近いものになっている。
【0046】
ステップS11の補正処理が完了したら、直前にGPSの測位を行った地点を、続く自律航法の測位に使用される基準地点とするために、ステップS10で設定された第2基準地点を新たな第1基準地点として登録する(ステップS12)。
【0047】
[較正処理]
ステップS11において補正処理が行われたら、次に、CPU10は、3軸地磁気センサ15や移動量の計測に使用する歩幅データの較正処理の要否を、上記の補正処理の結果に基づいて判断する(ステップS13:較正時期制御手段)。
【0048】
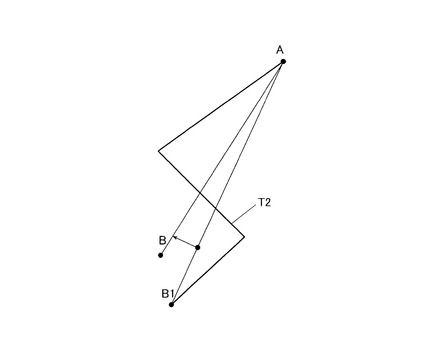
図5には、補正前後における移動軌跡の回転量と伸縮量を説明する図を示す。
このステップS13の判断処理は、補正前の移動軌跡(図3のT2)と補正後の移動軌跡(図3のT3)との間の伸縮量および回転量に基づき、この移動軌跡の補正量が所定範囲を超過しているか否かに基づいて行われる。ここで、回転量は、図5の∠B1・A・Bであり、伸縮量は線分B1・Aに対する線分B・Aの比率になる。例えば、伸縮の倍率が0.8倍〜1.2倍の範囲外である場合、回転量が±15°を超えた場合、或いは、伸縮の倍率が0.9倍〜1.1倍の範囲外で且つ回転量が±10°を超えた場合に、移動軌跡補正量が所定範囲を超過したと判断する。
【0049】
なお、これら判断基準となる倍率および回転量の値は、上記の例に制限されるものでなく、適宜な値に設計変更可能である。また、上記の例では、伸縮の倍率、回転量、および、これらを複合させた条件により、較正処理の要否を判断するようにしているが、例えば、伸縮の倍率のみ、回転量のみ、或いは、これらを複合させた条件のみによって、較正処理の要否を判断するようにしても良い。
【0050】
ステップS13の判別処理の結果、移動軌跡補正量が所定範囲を超過していなければ較正処理は不要と判断してステップS4に戻る。一方、移動軌跡補正量が所定範囲を超過していれば較正処理が必要と判断して、ステップS14以降の較正処理を実行する。
【0051】
較正処理が必要と判断されたら、先ず、CPU10は、3軸地磁気センサ15のオフセット修正処理を実行するようユーザに報知するため、例えば表示部18に案内表示を出力するなどの報知処理を実行する(ステップS14)。続いて、操作部17の入力信号を確認して一定時間内にユーザからの修正処理の開始操作があるか否かを判別する(ステップS15)。そして、一定時間内に開始操作がなければ、今回の較正処理は省略してステップS4に戻る。
【0052】
一方、一定時間内に開始操作があれば、CPU10は、オフセット修正処理を実行する(ステップS16:較正手段)。オフセット修正処理では、先ず、CPU10は、表示部18にオフセット修正処理に必要なユーザの動作内容と動作タイミングを知らせる表示を出力させる。そして、これらの表示に基づいてユーザに測位装置1を3次元的に回転させる操作を行わせる。さらに、この回転操作の間に、CPU10は3軸地磁気センサ15のセンサ出力を取り込んで、このセンサ出力を3次元座標にプロットした場合の球面状のプロット面、並びに、この球面状のプロット面の中心点をそれぞれ算出する。
【0053】
そして、上記の3次元座標の中心点と、球面状のプロット面の中心点との差ベクトルを、3軸地磁気センサ15のオフセットとして算出する。次いで、このオフセットを表わすオフセットデータをRAM11のオフセット記憶領域11aに格納して、修正処理を終了する。
【0054】
ステップS16のオフセット処修処理が完了したら、次に、CPU10は、今回求めたオフセットと、直前までオフセット記憶領域11aに格納されていたオフセットとの差(すなわち、オフセットの前回からの修正量)を求めて、この差が所定の閾値以上であるか未満であるか判別する(ステップS17)。このステップS17の判別処理は、移動軌跡の補正量が大きくなった原因が、3軸地磁気センサ15のオフセットのズレである可能性が高いか、或いは、オフセットのズレは小さく、その他に原因がある可能性が高いかを判別するためのものである。従って、上記の閾値はこのような判別に適した値に設定される。
【0055】
ステップS17の判別処理で、オフセットの差(前回からの修正量)が閾値以上であれば、較正処理は完了したものとしてステップS4に戻る。一方、オフセットの差が閾値未満であれば、移動軌跡の補正量が大きくなった原因が、歩幅データのズレにある可能性が高いと判断して、歩幅データ修正のために次に進む。
【0056】
次に進むと、先ず、CPU10は3軸加速度センサ16のセンサ出力を取り込んで、一定時間内に歩行動作が検出されるか判別する(ステップS18)。そして、一定時間内に歩行動作の検出がなければ、正確な歩幅データの算出は難しいと判断できるため、今回の歩幅データの修正処理を省略してステップS4に戻る。
【0057】
一方、一定時間内に歩行動作の検出があれば、CPU10は、歩幅データ修正処理を実行する(ステップS19:較正手段)。この歩幅データ修正処理においては、CPU10は、離間した2つの地点でGPS衛星の信号を受信して測位を行う。さらに、この2つの地点間の移動中に3軸地磁気センサ15と3軸加速度センサ16のセンサ出力のサンプリングデータを自律航法制御処理部20に送って、歩数のカウントと2地点間で直線的な移動が行われていたか確認処理を行う。
【0058】
そして、上記の2地点間の距離が、歩幅データを求めるのに適当な所定距離(例えば500m)を超えていて、その間を直線的に移動していることが確認されたら、CPU10は、GPSによる2地点の測位結果に基づき2地点間の距離を算出する。さらに、その間の歩数の計数値を自律航法制御処理部20から取得し、2地点間の距離を歩数の計数値で除算することで歩幅を表わす歩幅データを算出する。次いで、この歩幅データをRAM11の歩幅データ記憶領域11bに格納して、この歩幅データ修正処理を終了する。
【0059】
一方、上記の2地点間の距離が、歩幅データを求めるのに適当な所定距離に達していない場合には、精度の高い歩幅データが得られないと判断できるため、歩幅データを修正しないままこの歩幅データ修正処理を終了する。
【0060】
ステップS19の歩幅データ修正処理が終了したら、再び、ステップS4に戻って測位の処理を継続する。
【0061】
以上のように、この実施形態の測位装置1によれば、自律航法の測位によって得られた一連の位置データからなる移動軌跡をGPSの測位結果に基づいて補正した際、この移動軌跡の補正量が所定範囲を超えているか否か判別し、この判別結果に基づいて自律航法の測位に関する較正処理の実行時期を決定するようになっている。従って、較正処理の実行時期を判断するためだけに負荷の大きな処理を行う必要がなく、且つ、この較正処理を適切な時期に行わせることができる。
【0062】
また、この実施形態の測位装置1によれば、一連の位置データを補正する処理は、移動軌跡を一様に伸縮および回転させて、一連の位置データを変化後の移動軌跡の各地点の位置データに補正するものであり、さらに、この補正処理における移動軌跡の伸縮量(伸縮倍率)および回転量に基づいて較正処理の実行時期を制御するようになっている。従って、較正処理の要否の判断を容易に且つ適切に行うことができる。
【0063】
具体的には、自律航法の測位は、主に3軸地磁気センサ15のセンサ出力と3軸加速度センサ16の出力変動パターンに基づいて移動方向を算出し、3軸加速度センサ16のセンサ出力に基づいて歩数を計数し、歩幅データと歩数とを乗算することで移動量を算出する構成になっている。さらに、上記の較正処理では、3軸地磁気センサ15のセンサ出力のオフセットと歩幅データとが修正可能になっている。従って、上記のオフセットや歩幅データに比較的に大きなズレが生じたときには、自律航法の測位結果に一律の誤差が発生して、補正処理の補正量からこのズレの発生を比較的に正確に判別することができる。それゆえ、この判別に基づき較正処理の実行時期を制御することで、較正処理を最適な時期に実行させることができる。
【0064】
また、上記の実施形態の測位装置1では、較正処理において、先ず、3軸地磁気センサ15のオフセットの修正を行い、この修正量が閾値未満であった場合に、歩幅データがずれていると判断して歩幅データの修正処理を実行するようになっている。従って、3軸地磁気センサ15のオフセットのみ大きくずれていて歩幅データが大きくずれていないときには、前者のみの修正で較正処理が終了するので、無駄な処理を省いて電力消費の低減を図ることができる。
【0065】
なお、本発明は、上記実施の形態に限られるものでなく、様々な変更が可能である。例えば、上記実施形態では、GPSの測位を一定時間ごとに間欠的に行い、その間に自律航法の測位を連続的に行う構成を示したが、例えば、GPS衛星の信号を受信可能な状況ではGPSの測位を連続的に行い、GPS衛星の信号が受信できないときに自律航法の測位を行うようにした構成においても、本発明を同様に適用することができる。
【0066】
また、上記実施形態では、自律航法の測位により得られた一連の位置データを補正する方法として、移動軌跡を相似な形状のまま変化させて補正する方法を例示したが、他の補正方法であっても、一連の位置データの補正量に基づいて較正処理の実行時期を制御することで本発明を同様に適用することができる。その他、実施形態で示した細部は、発明の趣旨を逸脱しない範囲で適宜変更可能である。
【符号の説明】
【0067】
1 測位装置
10 CPU
11 RAM
11a オフセット記憶領域
11b 歩幅データ記憶領域
12 ROM
13 GPS受信アンテナ
14 GPS受信部
15 3軸地磁気センサ(地磁気センサ)
16 3軸加速度センサ(加速度センサ)
17 操作部
18 表示部
19 電源
20 自律航法制御処理部
21 自律航法誤差補正処理部
22 位置データ記憶部
24 地図データベース
A 地点
B 地点
T1 移動経路
T2 移動軌跡
T3 補正後の移動軌跡
【技術分野】
【0001】
この発明は、測位装置、測位装置の調整方法およびプログラムに関する。
【背景技術】
【0002】
従来、GPS(全地球測位システム)測位装置とモーションセンサ(加速度センサ、地磁気センサなど)とを組み合わせて測位を行うことで、移動経路中の各地点の位置データを蓄積していく装置が開発されている。モーションセンサは、GPS衛星の電波が届かない区域でも、相対的な移動量および移動方向を連続的に計測していくことで測位を行うことができる。
【0003】
モーションセンサに使用される地磁気センサは、周囲に配置される磁性体の影響等によりセンサ出力にオフセット誤差が含まれるため、この誤差を除去するために較正処理を行う必要がある。また、測定環境の変化や周囲の磁性体の着磁などにより、使用中にセンサ出力のオフセットが変化することがある。そのため、地磁気センサの較正処理は適当な時期に何度も行う必要がある(例えば特許文献1を参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3467797号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
地磁気センサの較正処理をユーザの指示により実行するようにした場合、較正処理が長い期間行われずに測定誤差が大きくなってしまったり、或いは、測定誤差がほとんどないときに較正処理が実行されて、無駄な操作が必要となったり、無駄な消費電力が発生したりするという課題が生じる。
【0006】
また、地磁気センサの較正処理のためだけに、常時或いは一定時間ごとに、センサ出力のオフセットが大きく変化していないか自動的に確認する処理を行うようにした場合、この確認処理自体に多くの演算処理が必要となり、消費電力も増大するという課題が生じる。
【0007】
この発明の目的は、移動量と移動方向を計測して測位を行う構成に対して、較正処理の実行時期を判断するためだけに多大な負荷を要することなく、適宜な時期に較正処理を行うことのできる測位装置、測位装置の調整方法およびプログラムを提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、請求項1記載の発明は、
測位衛星から信号を受信して測位を行う第1測位手段と、
基準地点の位置データと相対的な移動方向および移動量の計測とによって測位を行う第2測位手段と、
前記第2測位手段の連続的な測位により任意の移動過程の各地点の位置データが取得され、その後に前記第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記第2測位手段の測位により取得されている前記移動過程の各地点の位置データを補正する補正手段と、
前記第2測位手段の較正処理を行う較正手段と、
前記補正手段による前記位置データの補正量に基づいて前記較正手段による較正処理の実行時期を制御する較正時期制御手段と、
を備えたことを特徴とする測位装置である。
【0009】
請求項2記載の発明は、請求項1記載の測位装置において、
前記補正手段は、
第1地点から第2地点までの移動過程で、前記第1測位手段により前記第1地点と前記第2地点とで間欠的な測位が行われ、前記第2測位手段の測位により前記第1地点から前記第2地点までの移動過程を通した一連の位置データが取得されている場合に、
前記一連の位置データに対応する移動軌跡を、変化の前後で相似な形状となるように、前記移動軌跡の一端が前記第1測位手段による前記第1地点の測位結果に対応する地点と重なり、前記移動軌跡の他端が前記第1測位手段による前記第2地点の測位結果に対応する地点と重なるように、一様に回転および伸縮させて、前記一連の位置データを変化後の移動軌跡の各地点の位置データへ補正し、
前記較正時期制御手段は、
前記補正手段による前記移動軌跡の回転量、前記移動軌跡の伸縮量、或いは、当該回転量および当該伸縮量の複合量が、所定の範囲を超えている場合に、前記較正手段による較正処理を開始させることを特徴としている。
【0010】
請求項3記載の発明は、請求項1記載の測位装置において、
前記第2測位手段は、
地磁気の向きを検出する地磁気センサと、
加速度を検出する加速度センサと、
を有し、
前記地磁気センサにより検出された地磁気の向きおよび前記加速度センサの出力変動パターンに基づいて移動方向を計測し、前記加速度センサの検出出力から計数された歩数と予め設定された歩幅データとに基づいて移動量を計測し、
前記較正手段は、
前記地磁気センサのオフセットを修正する処理、または、前記歩幅データを修正する処理を行うことを特徴としている。
【0011】
請求項4記載の発明は、請求項3記載の測位装置において、
前記較正手段は、
前記地磁気センサのオフセットを修正する処理を行った後、このオフセットの修正量が所定量に満たない場合に、前記歩幅データを修正する処理を実行することを特徴としている。
【0012】
請求項5記載の発明は、
測位衛星から信号を受信して測位を行う第1測位手段、および、基準地点の位置データと相対的な移動方向および移動量の計測とによって測位を行う第2測位手段を備えた測位装置の調整方法であって、
前記第2測位手段の連続的な測位により任意の移動過程の各地点の位置データが取得され、その後に前記第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記第2測位手段の測位により取得されている前記移動過程の各地点の位置データを補正する補正ステップと、
前記第2測位手段の較正処理を行う較正ステップと、
前記補正ステップによる前記位置データの補正量に基づいて前記較正ステップによる較正処理の実行時期を制御する較正時期制御ステップと、
を含むことを特徴としている。
【0013】
請求項6記載の発明は、請求項5記載の測位装置の調整方法において、
前記補正ステップは、
第1地点から第2地点までの移動過程で、前記第1測位手段により前記第1地点と前記第2地点とで間欠的な測位が行われ、前記第2測位手段の測位により前記第1地点から前記第2地点までの移動過程を通した一連の位置データが取得されている場合に、
前記一連の位置データに対応する移動軌跡を、変化の前後で相似な形状となるように、前記移動軌跡の一端が前記第1測位手段による前記第1地点の測位結果に対応する地点と重なり、前記移動軌跡の他端が前記第1測位手段による前記第2地点の測位結果に対応する地点と重なるように、一様に回転および伸縮させて、前記一連の位置データを変化後の移動軌跡の各地点の位置データへ補正し、
前記較正時期制御ステップは、
前記補正ステップによる前記移動軌跡の回転量、前記移動軌跡の伸縮量、或いは、当該回転量および当該伸縮量の複合量が、所定の範囲を超えている場合に、前記較正ステップによる較正処理を開始させることを特徴としている。
【0014】
請求項7記載の発明は、
測位衛星から信号を受信して測位を行う第1測位手段、および、基準地点の位置データと相対的な移動方向および移動量の計測とによって測位を行う第2測位手段と通信可能にされたコンピュータに、
前記第2測位手段の連続的な測位により任意の移動過程の各地点の位置データが取得され、その後に前記第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記第2測位手段の測位により取得されている前記移動過程の各地点の位置データを補正する補正機能と、
前記第2測位手段の較正処理を行う較正機能と、
前記補正機能による前記位置データの補正量に基づいて前記較正機能による較正処理の実行時期を制御する較正時期制御機能と、
を実現させるプログラムである。
【0015】
請求項8記載の発明は、請求項7記載のプログラムにおいて、
前記補正機能は、
第1地点から第2地点までの移動過程で、前記第1測位手段により前記第1地点と前記第2地点とで間欠的な測位が行われ、前記第2測位手段の測位により前記第1地点から前記第2地点までの移動過程を通した一連の位置データが取得されている場合に、
前記一連の位置データに対応する移動軌跡を、変化の前後で相似な形状となるように、前記移動軌跡の一端が前記第1測位手段による前記第1地点の測位結果に対応する地点と重なり、前記移動軌跡の他端が前記第1測位手段による前記第2地点の測位結果に対応する地点と重なるように、一様に回転および伸縮させて、前記一連の位置データを変化後の移動軌跡の各地点の位置データへ補正し、
前記較正時期制御機能は、
前記補正機能による前記移動軌跡の回転量、前記移動軌跡の伸縮量、或いは、当該回転量および当該伸縮量の複合量が、所定の範囲を超えている場合に、前記較正機能による較正処理を開始させることを特徴としている。
【発明の効果】
【0016】
本発明に従うと、位置データの補正量に基づいて第2測位手段の較正処理の実行時期を判断するので、実行時期を判断するためだけに負荷の大きな処理を行う必要がなく、第2測位手段の較正処理を適宜な時期に実行させることができる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施形態の測位装置の全体構成を示すブロック図である。
【図2】測位処理で取得される一連の位置データの一例を示す図である。
【図3】自律航法の測位で得られた一連の位置データの補正処理を説明する図である。
【図4】CPUにより実行される測位処理の制御手順を示すフローチャートである。
【図5】補正前後における移動軌跡の伸縮量および回転量を説明する図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施の形態を図面に基づいて説明する。
【0019】
図1は、本発明の実施形態の測位装置の全体構成を示すブロック図である。
【0020】
この実施形態の測位装置1は、移動中に位置の測定を行って移動経路上の各地点の位置データを記録していく装置である。この測位装置1は、ユーザの歩行による移動に対応して自律航法による測位を行えるものである。
【0021】
この測位装置1は、図1に示すように、装置の全体的な制御を行うCPU(中央演算処理装置)10と、CPU10に作業用のメモリ空間を提供するRAM(Random Access Memory)11と、CPU10が実行する制御プログラムや制御データを格納したROM(Read Only Memory)12と、GPS(全地球測位システム)衛星からの送信データを受信するためのGPS受信アンテナ13およびGPS受信部14と、自律航法用センサである3軸地磁気センサ15および3軸加速度センサ16と、複数の操作ボタンを有しユーザから操作指令を入力する操作部17と、各種の情報表示や画像表示を行う表示部18と、各部に動作電圧を供給する電源19と、自律航法用センサ(15,16)の計測データに基づいて自律航法の測位演算を行う自律航法制御処理部20と、自律航法制御処理部20により取得された位置データの補正演算を行う補正手段としての自律航法誤差補正処理部21と、移動経路に沿った一連の位置データが蓄積されていく位置データ記憶部22と、各地点の地図画像データが登録された地図データベース24等を備えている。
【0022】
上記の構成のうち、GPS受信アンテナ13、GPS受信部14およびCPU10により第1測位手段が構成され、3軸地磁気センサ15、3軸加速度センサ16および自律航法制御処理部20により第2測位手段が構成される。
【0023】
GPS受信部14は、CPU10からの動作指令に基づいて、GPS受信アンテナ13を介して受信される信号の復調処理を行って、GPS衛星の各種送信データをCPU10に送る。CPU10は、このGPS衛星の送信データに基づいて所定の測位演算を行うことで、現在位置を表わす位置データを取得することができる。
【0024】
3軸地磁気センサ15は、互いに直行するx軸、y軸、z軸の各方向の磁界の大きさをそれぞれ検出する。3軸加速度センサ16はx軸、y軸、z軸の各方向の加速度の大きさをそれぞれ検出する。
【0025】
自律航法制御処理部20は、CPU10の演算処理を補助するためのものであり、所定のサンプリング周期で3軸地磁気センサ15と3軸加速度センサ16の計測データをCPU10を介して入力し、これらの計測データから測位装置1の移動方向と移動量とを算出していく。さらに、CPU10から供給される基準地点の位置データに、上記算出された移動方向および移動量からなるベクトルデータを積算していくことで、移動地点の位置データを求めてCPU10に出力する。
【0026】
詳細には、自律航法制御処理部20は、3軸加速度センサ16の出力に現れる歩行動作特有の出力変動パターンから移動方向を算出する。歩行時において、ユーザの胴体は前後に大きく傾斜するとともに、左右に小さくローリングする。このとき、測位装置1がユーザの胴体に装着されていると、測位装置1も同様の運動を行うので、この運動が3軸加速度センサ16の出力に現れる。自律航法制御処理部20は、この出力変動パターンを解析することで、ユーザは測位装置1の何れの向きに進行しているのか算出できる。また、3軸加速度センサ16の出力に基づき測位装置1の何れの向きが重力方向なのか求められ、3軸地磁気センサ15の出力に基づき測位装置1の何れの向きが磁北の方向であるのか算出することができる。そして、これらの結果からユーザの移動方向を方位により求めることができる。
【0027】
また、自律航法制御処理部20は、3軸加速度センサ16の出力から測位装置1の上下動の検出を行い、この上下動の検出から歩数をカウントする。そして、予め設定されている歩幅データと歩数とを乗算することで、歩行による移動量を算出する。ここで、歩幅データに誤差があると、移動量の計測結果に一律の計測誤差が付加されることになる。
【0028】
自律航法誤差補正処理部21は、CPU10の演算処理を補助するための演算装置である。この自律航法誤差補正処理部21は、自律航法制御処理部20により算出されて位置データ記憶部22に記憶されている一連の位置データを、間欠的なGPS測位が行われた際に、このGPS測位により取得された位置データに基づいて、より正確な位置データに補正する演算処理を行うものである。この補正処理の具体例については後に詳述する。
【0029】
位置データ記憶部22は、例えばRAMまたは不揮発性メモリなどにより構成され、装置移動中の測位によって取得された位置データが順次登録されるものである。位置データには、例えば、その取得順序を表わすインデックスナンバー「No.」と、位置データが補正済みのものか否かを表わす補正フラグ等が、それぞれ記憶時に付加される。
【0030】
RAM11には、3軸地磁気センサ15のセンサ出力のオフセットを表わすオフセットデータが記憶されるオフセット記憶領域11aと、移動量を計算するのに使用される歩幅データが記憶される歩幅データ記憶領域11b等が設けられている。
【0031】
ROM12には、自律航法による測位とGPSによる測位とを併用して移動過程の各地点の位置データを取得していく測位制御処理のプログラムが格納されている。このプログラムは、ROM12に格納するほか、例えば、データ読取装置を介してCPU10が読み取り可能な、例えば、光ディスク等の可搬型記憶媒体、フラッシュメモリ等の不揮発性メモリに格納しておくことが可能である。また、このようなプログラムをキャリアウェーブ(搬送波)を媒体として通信回線を介して測位装置1にダウンロードされる形態を適用することもできる。
【0032】
次に、上記構成の測位装置1において実行される第1実施形態の測位制御処理について説明する。
【0033】
図2には、測位制御処理の測位処理で取得される一連の位置データの一例を表わした図を示す。図4には、CPU10により実行される測位制御処理のフローチャートを示す。
【0034】
[測位処理]
測位制御処理では、GPSによる測位を間欠的に行うとともに、このGPSの測位の間に自律航法による測位を連続的に行って移動過程の各地点の位置データを記憶していく。図2の例では、地点Aから地点Bまで移動した場合において、破線により実際の移動経路T1を、実線により自律航法による測位結果の移動軌跡T2を、それぞれ表わしている。始点の地点AでGPSによる1回目の測位が行われた後、地点Aから地点Bの移動過程で自律航法の測位が連続的に行われて移動軌跡T2に表わされる一連の位置データが取得され、その後、地点BでGPSによる2回目の測位が行われている。
【0035】
このような測位処理は、図4のフローチャートにおいて、主にステップS1〜S9により実現される。すなわち、測位処理が開始されると、CPU10は、先ず、GPS受信アンテナ13とGPS受信部14とを介してGPS衛星の信号を受信する(ステップS1)。そして、所定の測位演算を行って位置データを算出し、これを測位時刻のデータ等とともに位置データ記憶部22に記憶させる(ステップS2)。図2の地点AのGPSの測位がこれらの処理により遂行されている。
【0036】
続いて、このGPSの測位結果を自律航法の測位の始点となる第1基準地点の位置データとして登録し(ステップS3)、次に、GPSの測位を行う時間をカウントするGPS受信カウンタをリセットする(ステップS4)。そして、続くステップS5〜S7のループ処理により、3軸加速度センサ16と3軸地磁気センサ15とのセンサ出力のサンプリングデータを読み込む処理(ステップS5)と、自律航法による測位を行って位置データを測位時刻のデータ等とともに位置データ記憶部22に記憶させる処理(ステップS6)とを、GPS受信カウンタが一定時間を超えたか判別して(ステップS7)、超えるまで繰り返す。図2の地点A〜地点Bの移動過程の測位がこれらのループ処理により遂行されている。
【0037】
ステップS6の測位処理においては、CPU10がステップS5で読み込んだサンプリングデータを自律航法制御処理部20に送り、自律航法制御処理部20により相対的な移動方向および移動量の測定を行って測位地点の位置データを算出する。3軸地磁気センサ15のセンサ出力を読み込む際には、RAM11の記憶領域11aのオフセットデータが使用されてセンサ出力からオフセットを除去する処理が行われる。また、相対的な移動量を算出する際には、RAM11の記憶領域11bの歩幅データが使用される。
【0038】
ステップS7の位置データの記憶処理においては、位置データが未補正であることを示す補正フラグが付加されて記憶される。
【0039】
一方、ステップS7の判別処理で、GPS受信カウンタの計数値が一定時間を超えていると判別されたら、間欠的なGPSの測位の処理へ移行する。すなわち、CPU10は、GPS受信アンテナ13とGPS受信部14とを介してGPS衛星の信号を受信し(ステップS8)、所定の測位演算を行って位置データを算出するとともに、この位置データを測位時刻のデータ等とともに位置データ記憶部22に記憶させる(ステップS9)。図2の地点BのGPSの測位がこれらの処理により遂行されている。
【0040】
そして、後述するステップS10〜S13或いはステップS10〜S19の処理を挟んでステップS4に戻り、ステップS4からの処理が繰り返されることで、上記の間欠的なGPSによる測位と、その間の連続的な自律航法の測位とが繰り返し実行されて、移動経路の各地点の位置データが取得されるようになっている。
【0041】
[補正処理]
図3には、自律航法の測位で得られた一連の位置データの補正処理を説明する図を示す。同図中、実線により自律航法の測位で得られた一連の位置データの移動軌跡T2を、一点鎖線により補正後の位置データの移動軌跡T3を、それぞれ表わしている。
【0042】
上記のステップS8,S9で間欠的なGPSの測位処理を行ったら、続いて、CPU10は、このGPSの測位が行われた地点(例えば地点B)を第2基準地点として登録する(ステップS10)。そして、前回のGPSの測位が行われた第1基準地点(例えば地点A)から直前までに自律航法の測位で得られた一連の位置データ(例えば移動軌跡T2の位置データ)の補正処理を行う(ステップS11:補正手段)。
【0043】
ステップS11の補正処理においては、CPU10は、上記の一連の位置データが示す移動軌跡(例えば移動軌跡T2)を、第1基準地点(例えば地点A)と重なる一端部を固定したまま、他端部が第2基準地点(例えば地点B)と重なるように、一様に拡大又は縮小ならびに回転させて補正後の移動軌跡(例えば移動軌跡T3)を作成する。つまり、補正前の移動軌跡(T2)と補正後の移動軌跡(T3)とが相似になるように変形させる。そして、この補正後の移動軌跡(T3)上に移動された各測位地点の位置データを補正後の位置データとして補正する。自律航法誤差補正処理部21は、上記の移動軌跡を変形させる演算処理を行って補正後の一連の位置データを算出する。
【0044】
上記補正後の一連の位置データは、例えば、位置データ記憶部22の補正前の位置データに上書きされて記憶される。その際、位置データが補正済みであることを示す補正フラグが付加されて記憶される。
【0045】
このような補正処理により、自律航法の測位の際に、移動量の計測値や移動方向の計測値に一律の誤差が含まれているような場合に、これらの誤差を有効に除去することができる。図2と図3の例において、補正後の位置データの移動軌跡T3は補正前の移動軌跡T2よりも実際の移動経路T1に近いものになっている。
【0046】
ステップS11の補正処理が完了したら、直前にGPSの測位を行った地点を、続く自律航法の測位に使用される基準地点とするために、ステップS10で設定された第2基準地点を新たな第1基準地点として登録する(ステップS12)。
【0047】
[較正処理]
ステップS11において補正処理が行われたら、次に、CPU10は、3軸地磁気センサ15や移動量の計測に使用する歩幅データの較正処理の要否を、上記の補正処理の結果に基づいて判断する(ステップS13:較正時期制御手段)。
【0048】
図5には、補正前後における移動軌跡の回転量と伸縮量を説明する図を示す。
このステップS13の判断処理は、補正前の移動軌跡(図3のT2)と補正後の移動軌跡(図3のT3)との間の伸縮量および回転量に基づき、この移動軌跡の補正量が所定範囲を超過しているか否かに基づいて行われる。ここで、回転量は、図5の∠B1・A・Bであり、伸縮量は線分B1・Aに対する線分B・Aの比率になる。例えば、伸縮の倍率が0.8倍〜1.2倍の範囲外である場合、回転量が±15°を超えた場合、或いは、伸縮の倍率が0.9倍〜1.1倍の範囲外で且つ回転量が±10°を超えた場合に、移動軌跡補正量が所定範囲を超過したと判断する。
【0049】
なお、これら判断基準となる倍率および回転量の値は、上記の例に制限されるものでなく、適宜な値に設計変更可能である。また、上記の例では、伸縮の倍率、回転量、および、これらを複合させた条件により、較正処理の要否を判断するようにしているが、例えば、伸縮の倍率のみ、回転量のみ、或いは、これらを複合させた条件のみによって、較正処理の要否を判断するようにしても良い。
【0050】
ステップS13の判別処理の結果、移動軌跡補正量が所定範囲を超過していなければ較正処理は不要と判断してステップS4に戻る。一方、移動軌跡補正量が所定範囲を超過していれば較正処理が必要と判断して、ステップS14以降の較正処理を実行する。
【0051】
較正処理が必要と判断されたら、先ず、CPU10は、3軸地磁気センサ15のオフセット修正処理を実行するようユーザに報知するため、例えば表示部18に案内表示を出力するなどの報知処理を実行する(ステップS14)。続いて、操作部17の入力信号を確認して一定時間内にユーザからの修正処理の開始操作があるか否かを判別する(ステップS15)。そして、一定時間内に開始操作がなければ、今回の較正処理は省略してステップS4に戻る。
【0052】
一方、一定時間内に開始操作があれば、CPU10は、オフセット修正処理を実行する(ステップS16:較正手段)。オフセット修正処理では、先ず、CPU10は、表示部18にオフセット修正処理に必要なユーザの動作内容と動作タイミングを知らせる表示を出力させる。そして、これらの表示に基づいてユーザに測位装置1を3次元的に回転させる操作を行わせる。さらに、この回転操作の間に、CPU10は3軸地磁気センサ15のセンサ出力を取り込んで、このセンサ出力を3次元座標にプロットした場合の球面状のプロット面、並びに、この球面状のプロット面の中心点をそれぞれ算出する。
【0053】
そして、上記の3次元座標の中心点と、球面状のプロット面の中心点との差ベクトルを、3軸地磁気センサ15のオフセットとして算出する。次いで、このオフセットを表わすオフセットデータをRAM11のオフセット記憶領域11aに格納して、修正処理を終了する。
【0054】
ステップS16のオフセット処修処理が完了したら、次に、CPU10は、今回求めたオフセットと、直前までオフセット記憶領域11aに格納されていたオフセットとの差(すなわち、オフセットの前回からの修正量)を求めて、この差が所定の閾値以上であるか未満であるか判別する(ステップS17)。このステップS17の判別処理は、移動軌跡の補正量が大きくなった原因が、3軸地磁気センサ15のオフセットのズレである可能性が高いか、或いは、オフセットのズレは小さく、その他に原因がある可能性が高いかを判別するためのものである。従って、上記の閾値はこのような判別に適した値に設定される。
【0055】
ステップS17の判別処理で、オフセットの差(前回からの修正量)が閾値以上であれば、較正処理は完了したものとしてステップS4に戻る。一方、オフセットの差が閾値未満であれば、移動軌跡の補正量が大きくなった原因が、歩幅データのズレにある可能性が高いと判断して、歩幅データ修正のために次に進む。
【0056】
次に進むと、先ず、CPU10は3軸加速度センサ16のセンサ出力を取り込んで、一定時間内に歩行動作が検出されるか判別する(ステップS18)。そして、一定時間内に歩行動作の検出がなければ、正確な歩幅データの算出は難しいと判断できるため、今回の歩幅データの修正処理を省略してステップS4に戻る。
【0057】
一方、一定時間内に歩行動作の検出があれば、CPU10は、歩幅データ修正処理を実行する(ステップS19:較正手段)。この歩幅データ修正処理においては、CPU10は、離間した2つの地点でGPS衛星の信号を受信して測位を行う。さらに、この2つの地点間の移動中に3軸地磁気センサ15と3軸加速度センサ16のセンサ出力のサンプリングデータを自律航法制御処理部20に送って、歩数のカウントと2地点間で直線的な移動が行われていたか確認処理を行う。
【0058】
そして、上記の2地点間の距離が、歩幅データを求めるのに適当な所定距離(例えば500m)を超えていて、その間を直線的に移動していることが確認されたら、CPU10は、GPSによる2地点の測位結果に基づき2地点間の距離を算出する。さらに、その間の歩数の計数値を自律航法制御処理部20から取得し、2地点間の距離を歩数の計数値で除算することで歩幅を表わす歩幅データを算出する。次いで、この歩幅データをRAM11の歩幅データ記憶領域11bに格納して、この歩幅データ修正処理を終了する。
【0059】
一方、上記の2地点間の距離が、歩幅データを求めるのに適当な所定距離に達していない場合には、精度の高い歩幅データが得られないと判断できるため、歩幅データを修正しないままこの歩幅データ修正処理を終了する。
【0060】
ステップS19の歩幅データ修正処理が終了したら、再び、ステップS4に戻って測位の処理を継続する。
【0061】
以上のように、この実施形態の測位装置1によれば、自律航法の測位によって得られた一連の位置データからなる移動軌跡をGPSの測位結果に基づいて補正した際、この移動軌跡の補正量が所定範囲を超えているか否か判別し、この判別結果に基づいて自律航法の測位に関する較正処理の実行時期を決定するようになっている。従って、較正処理の実行時期を判断するためだけに負荷の大きな処理を行う必要がなく、且つ、この較正処理を適切な時期に行わせることができる。
【0062】
また、この実施形態の測位装置1によれば、一連の位置データを補正する処理は、移動軌跡を一様に伸縮および回転させて、一連の位置データを変化後の移動軌跡の各地点の位置データに補正するものであり、さらに、この補正処理における移動軌跡の伸縮量(伸縮倍率)および回転量に基づいて較正処理の実行時期を制御するようになっている。従って、較正処理の要否の判断を容易に且つ適切に行うことができる。
【0063】
具体的には、自律航法の測位は、主に3軸地磁気センサ15のセンサ出力と3軸加速度センサ16の出力変動パターンに基づいて移動方向を算出し、3軸加速度センサ16のセンサ出力に基づいて歩数を計数し、歩幅データと歩数とを乗算することで移動量を算出する構成になっている。さらに、上記の較正処理では、3軸地磁気センサ15のセンサ出力のオフセットと歩幅データとが修正可能になっている。従って、上記のオフセットや歩幅データに比較的に大きなズレが生じたときには、自律航法の測位結果に一律の誤差が発生して、補正処理の補正量からこのズレの発生を比較的に正確に判別することができる。それゆえ、この判別に基づき較正処理の実行時期を制御することで、較正処理を最適な時期に実行させることができる。
【0064】
また、上記の実施形態の測位装置1では、較正処理において、先ず、3軸地磁気センサ15のオフセットの修正を行い、この修正量が閾値未満であった場合に、歩幅データがずれていると判断して歩幅データの修正処理を実行するようになっている。従って、3軸地磁気センサ15のオフセットのみ大きくずれていて歩幅データが大きくずれていないときには、前者のみの修正で較正処理が終了するので、無駄な処理を省いて電力消費の低減を図ることができる。
【0065】
なお、本発明は、上記実施の形態に限られるものでなく、様々な変更が可能である。例えば、上記実施形態では、GPSの測位を一定時間ごとに間欠的に行い、その間に自律航法の測位を連続的に行う構成を示したが、例えば、GPS衛星の信号を受信可能な状況ではGPSの測位を連続的に行い、GPS衛星の信号が受信できないときに自律航法の測位を行うようにした構成においても、本発明を同様に適用することができる。
【0066】
また、上記実施形態では、自律航法の測位により得られた一連の位置データを補正する方法として、移動軌跡を相似な形状のまま変化させて補正する方法を例示したが、他の補正方法であっても、一連の位置データの補正量に基づいて較正処理の実行時期を制御することで本発明を同様に適用することができる。その他、実施形態で示した細部は、発明の趣旨を逸脱しない範囲で適宜変更可能である。
【符号の説明】
【0067】
1 測位装置
10 CPU
11 RAM
11a オフセット記憶領域
11b 歩幅データ記憶領域
12 ROM
13 GPS受信アンテナ
14 GPS受信部
15 3軸地磁気センサ(地磁気センサ)
16 3軸加速度センサ(加速度センサ)
17 操作部
18 表示部
19 電源
20 自律航法制御処理部
21 自律航法誤差補正処理部
22 位置データ記憶部
24 地図データベース
A 地点
B 地点
T1 移動経路
T2 移動軌跡
T3 補正後の移動軌跡
【特許請求の範囲】
【請求項1】
測位衛星から信号を受信して測位を行う第1測位手段と、
基準地点の位置データと相対的な移動方向および移動量の計測とによって測位を行う第2測位手段と、
前記第2測位手段の連続的な測位により任意の移動過程の各地点の位置データが取得され、その後に前記第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記第2測位手段の測位により取得されている前記移動過程の各地点の位置データを補正する補正手段と、
前記第2測位手段の較正処理を行う較正手段と、
前記補正手段による前記位置データの補正量に基づいて前記較正手段による較正処理の実行時期を制御する較正時期制御手段と、
を備えたことを特徴とする測位装置。
【請求項2】
前記補正手段は、
第1地点から第2地点までの移動過程で、前記第1測位手段により前記第1地点と前記第2地点とで間欠的な測位が行われ、前記第2測位手段の測位により前記第1地点から前記第2地点までの移動過程を通した一連の位置データが取得されている場合に、
前記一連の位置データに対応する移動軌跡を、変化の前後で相似な形状となるように、前記移動軌跡の一端が前記第1測位手段による前記第1地点の測位結果に対応する地点と重なり、前記移動軌跡の他端が前記第1測位手段による前記第2地点の測位結果に対応する地点と重なるように、一様に回転および伸縮させて、前記一連の位置データを変化後の移動軌跡の各地点の位置データへ補正し、
前記較正時期制御手段は、
前記補正手段による前記移動軌跡の回転量、前記移動軌跡の伸縮量、或いは、当該回転量および当該伸縮量の複合量が、所定の範囲を超えている場合に、前記較正手段による較正処理を開始させることを特徴とする請求項1記載の測位装置。
【請求項3】
前記第2測位手段は、
地磁気の向きを検出する地磁気センサと、
加速度を検出する加速度センサと、
を有し、
前記地磁気センサにより検出された地磁気の向きおよび前記加速度センサの出力変動パターンに基づいて移動方向を計測し、前記加速度センサの検出出力から計数された歩数と予め設定された歩幅データとに基づいて移動量を計測し、
前記較正手段は、
前記地磁気センサのオフセットを修正する処理、または、前記歩幅データを修正する処理を行うことを特徴とする請求項1記載の測位装置。
【請求項4】
前記較正手段は、
前記地磁気センサのオフセットを修正する処理を行った後、このオフセットの修正量が所定量に満たない場合に、前記歩幅データを修正する処理を実行することを特徴とする請求項3記載の測位装置。
【請求項5】
測位衛星から信号を受信して測位を行う第1測位手段、および、基準地点の位置データと相対的な移動方向および移動量の計測とによって測位を行う第2測位手段を備えた測位装置の調整方法であって、
前記第2測位手段の連続的な測位により任意の移動過程の各地点の位置データが取得され、その後に前記第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記第2測位手段の測位により取得されている前記移動過程の各地点の位置データを補正する補正ステップと、
前記第2測位手段の較正処理を行う較正ステップと、
前記補正ステップによる前記位置データの補正量に基づいて前記較正ステップによる較正処理の実行時期を制御する較正時期制御ステップと、
を含むことを特徴とする測位装置の調整方法。
【請求項6】
前記補正ステップは、
第1地点から第2地点までの移動過程で、前記第1測位手段により前記第1地点と前記第2地点とで間欠的な測位が行われ、前記第2測位手段の測位により前記第1地点から前記第2地点までの移動過程を通した一連の位置データが取得されている場合に、
前記一連の位置データに対応する移動軌跡を、変化の前後で相似な形状となるように、前記移動軌跡の一端が前記第1測位手段による前記第1地点の測位結果に対応する地点と重なり、前記移動軌跡の他端が前記第1測位手段による前記第2地点の測位結果に対応する地点と重なるように、一様に回転および伸縮させて、前記一連の位置データを変化後の移動軌跡の各地点の位置データへ補正し、
前記較正時期制御ステップは、
前記補正ステップによる前記移動軌跡の回転量、前記移動軌跡の伸縮量、或いは、当該回転量および当該伸縮量の複合量が、所定の範囲を超えている場合に、前記較正ステップによる較正処理を開始させることを特徴とする請求項5記載の測位装置の調整方法。
【請求項7】
測位衛星から信号を受信して測位を行う第1測位手段、および、基準地点の位置データと相対的な移動方向および移動量の計測とによって測位を行う第2測位手段と通信可能にされたコンピュータに、
前記第2測位手段の連続的な測位により任意の移動過程の各地点の位置データが取得され、その後に前記第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記第2測位手段の測位により取得されている前記移動過程の各地点の位置データを補正する補正機能と、
前記第2測位手段の較正処理を行う較正機能と、
前記補正機能による前記位置データの補正量に基づいて前記較正機能による較正処理の実行時期を制御する較正時期制御機能と、
を実現させるプログラム。
【請求項8】
前記補正機能は、
第1地点から第2地点までの移動過程で、前記第1測位手段により前記第1地点と前記第2地点とで間欠的な測位が行われ、前記第2測位手段の測位により前記第1地点から前記第2地点までの移動過程を通した一連の位置データが取得されている場合に、
前記一連の位置データに対応する移動軌跡を、変化の前後で相似な形状となるように、前記移動軌跡の一端が前記第1測位手段による前記第1地点の測位結果に対応する地点と重なり、前記移動軌跡の他端が前記第1測位手段による前記第2地点の測位結果に対応する地点と重なるように、一様に回転および伸縮させて、前記一連の位置データを変化後の移動軌跡の各地点の位置データへ補正し、
前記較正時期制御機能は、
前記補正機能による前記移動軌跡の回転量、前記移動軌跡の伸縮量、或いは、当該回転量および当該伸縮量の複合量が、所定の範囲を超えている場合に、前記較正機能による較正処理を開始させることを特徴とする請求項7記載のプログラム。
【請求項1】
測位衛星から信号を受信して測位を行う第1測位手段と、
基準地点の位置データと相対的な移動方向および移動量の計測とによって測位を行う第2測位手段と、
前記第2測位手段の連続的な測位により任意の移動過程の各地点の位置データが取得され、その後に前記第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記第2測位手段の測位により取得されている前記移動過程の各地点の位置データを補正する補正手段と、
前記第2測位手段の較正処理を行う較正手段と、
前記補正手段による前記位置データの補正量に基づいて前記較正手段による較正処理の実行時期を制御する較正時期制御手段と、
を備えたことを特徴とする測位装置。
【請求項2】
前記補正手段は、
第1地点から第2地点までの移動過程で、前記第1測位手段により前記第1地点と前記第2地点とで間欠的な測位が行われ、前記第2測位手段の測位により前記第1地点から前記第2地点までの移動過程を通した一連の位置データが取得されている場合に、
前記一連の位置データに対応する移動軌跡を、変化の前後で相似な形状となるように、前記移動軌跡の一端が前記第1測位手段による前記第1地点の測位結果に対応する地点と重なり、前記移動軌跡の他端が前記第1測位手段による前記第2地点の測位結果に対応する地点と重なるように、一様に回転および伸縮させて、前記一連の位置データを変化後の移動軌跡の各地点の位置データへ補正し、
前記較正時期制御手段は、
前記補正手段による前記移動軌跡の回転量、前記移動軌跡の伸縮量、或いは、当該回転量および当該伸縮量の複合量が、所定の範囲を超えている場合に、前記較正手段による較正処理を開始させることを特徴とする請求項1記載の測位装置。
【請求項3】
前記第2測位手段は、
地磁気の向きを検出する地磁気センサと、
加速度を検出する加速度センサと、
を有し、
前記地磁気センサにより検出された地磁気の向きおよび前記加速度センサの出力変動パターンに基づいて移動方向を計測し、前記加速度センサの検出出力から計数された歩数と予め設定された歩幅データとに基づいて移動量を計測し、
前記較正手段は、
前記地磁気センサのオフセットを修正する処理、または、前記歩幅データを修正する処理を行うことを特徴とする請求項1記載の測位装置。
【請求項4】
前記較正手段は、
前記地磁気センサのオフセットを修正する処理を行った後、このオフセットの修正量が所定量に満たない場合に、前記歩幅データを修正する処理を実行することを特徴とする請求項3記載の測位装置。
【請求項5】
測位衛星から信号を受信して測位を行う第1測位手段、および、基準地点の位置データと相対的な移動方向および移動量の計測とによって測位を行う第2測位手段を備えた測位装置の調整方法であって、
前記第2測位手段の連続的な測位により任意の移動過程の各地点の位置データが取得され、その後に前記第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記第2測位手段の測位により取得されている前記移動過程の各地点の位置データを補正する補正ステップと、
前記第2測位手段の較正処理を行う較正ステップと、
前記補正ステップによる前記位置データの補正量に基づいて前記較正ステップによる較正処理の実行時期を制御する較正時期制御ステップと、
を含むことを特徴とする測位装置の調整方法。
【請求項6】
前記補正ステップは、
第1地点から第2地点までの移動過程で、前記第1測位手段により前記第1地点と前記第2地点とで間欠的な測位が行われ、前記第2測位手段の測位により前記第1地点から前記第2地点までの移動過程を通した一連の位置データが取得されている場合に、
前記一連の位置データに対応する移動軌跡を、変化の前後で相似な形状となるように、前記移動軌跡の一端が前記第1測位手段による前記第1地点の測位結果に対応する地点と重なり、前記移動軌跡の他端が前記第1測位手段による前記第2地点の測位結果に対応する地点と重なるように、一様に回転および伸縮させて、前記一連の位置データを変化後の移動軌跡の各地点の位置データへ補正し、
前記較正時期制御ステップは、
前記補正ステップによる前記移動軌跡の回転量、前記移動軌跡の伸縮量、或いは、当該回転量および当該伸縮量の複合量が、所定の範囲を超えている場合に、前記較正ステップによる較正処理を開始させることを特徴とする請求項5記載の測位装置の調整方法。
【請求項7】
測位衛星から信号を受信して測位を行う第1測位手段、および、基準地点の位置データと相対的な移動方向および移動量の計測とによって測位を行う第2測位手段と通信可能にされたコンピュータに、
前記第2測位手段の連続的な測位により任意の移動過程の各地点の位置データが取得され、その後に前記第1測位手段により測位が行われた場合に、当該第1測位手段の測位結果に基づき前記第2測位手段の測位により取得されている前記移動過程の各地点の位置データを補正する補正機能と、
前記第2測位手段の較正処理を行う較正機能と、
前記補正機能による前記位置データの補正量に基づいて前記較正機能による較正処理の実行時期を制御する較正時期制御機能と、
を実現させるプログラム。
【請求項8】
前記補正機能は、
第1地点から第2地点までの移動過程で、前記第1測位手段により前記第1地点と前記第2地点とで間欠的な測位が行われ、前記第2測位手段の測位により前記第1地点から前記第2地点までの移動過程を通した一連の位置データが取得されている場合に、
前記一連の位置データに対応する移動軌跡を、変化の前後で相似な形状となるように、前記移動軌跡の一端が前記第1測位手段による前記第1地点の測位結果に対応する地点と重なり、前記移動軌跡の他端が前記第1測位手段による前記第2地点の測位結果に対応する地点と重なるように、一様に回転および伸縮させて、前記一連の位置データを変化後の移動軌跡の各地点の位置データへ補正し、
前記較正時期制御機能は、
前記補正機能による前記移動軌跡の回転量、前記移動軌跡の伸縮量、或いは、当該回転量および当該伸縮量の複合量が、所定の範囲を超えている場合に、前記較正機能による較正処理を開始させることを特徴とする請求項7記載のプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−98263(P2012−98263A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−249328(P2010−249328)
【出願日】平成22年11月8日(2010.11.8)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年11月8日(2010.11.8)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
[ Back to top ]