
測位装置および測位方法
【課題】消費電力量を抑えるように測位を行いつつ、目的地の近傍においては移動速度に関わらず位置を測位できるようにする。
【解決手段】携帯端末は、測位した現在位置から目的地までの距離が定められた距離を超えている場合には、現在位置から目的地までの移動速度を演算し、演算結果と目的地までの距離から目的地までの移動時間を演算する。携帯端末は、演算した移動時間の間は測位を停止する。目的地までの距離が定められた距離未満である場合には、周期的に現在位置を測位する。
【解決手段】携帯端末は、測位した現在位置から目的地までの距離が定められた距離を超えている場合には、現在位置から目的地までの移動速度を演算し、演算結果と目的地までの距離から目的地までの移動時間を演算する。携帯端末は、演算した移動時間の間は測位を停止する。目的地までの距離が定められた距離未満である場合には、周期的に現在位置を測位する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置を測位する技術に関する。
【背景技術】
【0002】
特許文献1には、GPS(Global Positioning System)により位置を測位する移動体端末が記載されている。この移動体端末は、GPSにより現在位置を測位し、所定の監視エリアから現在位置までの距離を算出し、算出した距離に基づいて、次に現在位置を測位する時間を決定する。そして、決定した時間をカウントすると再度GPSにより現在位置を測定する。また、特許文献2には、距離を算出した後に移動体端末の移動速度を求め、所定の範囲に設定されたエリアから現在位置までの距離と、移動速度に基づいて、次に現在位置を測位する時間を決定することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−250853号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に開示された発明は、監視エリアに到達するまでの間においては、決定した時間が経過するまでは測位が停止される。このため、監視エリアに近づいた後で移動速度を上げると、監視エリアに到達したことがすぐに検知できない場合が生じえる。
【0005】
本発明は、上述した背景の下になされたものであり、消費電力量を抑えるように測位を行いつつ、目的地の近傍においては移動速度に関わらず位置を測位できる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決するために本発明は、目的地の位置を表す位置情報を記憶する目的地記憶手段と、自機の位置を測位する測位手段と、前記測位手段により測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離を演算する距離演算手段と、前記測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶手段と、前記距離演算手段により演算された距離が定められた距離を超える場合、前記移動位置記憶手段に記憶された位置情報と時刻情報とに基づいて、前記測位手段で測位された位置における自機の移動速度を演算する移動速度演算手段と、前記距離演算手段により演算された距離が定められた距離を超える場合、前記測位手段によって測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの自機の移動時間を、前記距離演算手段の演算結果と前記移動速度演算手段の演算結果から演算する移動時間演算手段と、前記移動時間演算手段により演算された前記移動時間が経過するまでの間は、前記測位手段による測位を停止し、前記移動時間が経過すると前記測位手段に測位を行わせ、前記距離演算手段により演算された距離が定められた距離以下の場合には、前記測位手段に周期的に測位を行わせる制御手段とを有する測位装置を提供する。
【0007】
本発明においては、前記距離演算手段は、測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離に前記測位手段の測位の誤差を加算する演算を行う構成であってもよい。
【0008】
また、本発明においては、前記測位手段で測位された位置と、当該位置における前記移動速度とを対応付けて記憶する移動速度記憶手段を有し、前記移動速度演算手段は、前記移動速度記憶手段において、前記測位手段で測位された位置から定められた範囲内にある位置と対応付けられている移動速度の相加平均または加重平均を自機の移動速度とし、前記移動速度記憶手段は、相加平均または加重平均から得た移動速度と、前記測位手段により測位された位置とを対応付けて前記移動速度記憶手段に記憶させる構成であってもよい。
【0009】
また、本発明においては、前記測位手段で測位された位置と、当該位置における前記移動速度と、当該移動速度が演算された時刻を対応付けて記憶する移動速度記憶手段を有し、前記移動速度演算手段は、前記移動速度記憶手段において、測位した位置から定められた範囲内にある位置と対応づけられており、且つ、測位した時刻から定められた範囲内の時刻が対応付けられている移動速度の相加平均または加重平均を自機の移動速度とし、前記移動速度記憶手段は、相加平均または加重平均から得た移動速度と、前記測位手段により測位された位置と、相加平均または加重平均から移動速度を得た時の時刻とを対応付けて前記移動速度記憶手段に記憶させる構成であってもよい。
【0010】
また、本発明においては、前記移動時間演算手段は、演算により得た移動時間が予め定められた時間範囲外となる場合、移動時間を当該時間範囲内の時間にする構成であってもよい。
【0011】
また、本発明は、目的地の位置を表す位置情報を記憶する目的地記憶手段と、自機の位置を測位する第1測位手段と、自機の位置を測位し、測位時の消費電力量が前記第1測位手段より大きく、測位の誤差が前記第1測位手段より小さい第2測位手段と、前記第1測位手段と前記第2測位手段のいずれかを選択し、選択した測位手段に測位を行わせる制御手段と、前記制御手段で選択されている測位手段により測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離を演算する距離演算手段と、前記制御手段で選択されている測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶手段と、前記距離演算手段により演算された距離が前記第1測位手段の測位の誤差以上である場合、前記移動位置記憶手段に記憶された位置情報と時刻情報とに基づいて、前記制御手段で選択されている測位手段で測位された位置における自機の移動速度を演算する移動速度演算手段と、前記距離演算手段により演算された距離が前記第1測位手段の測位の誤差以上である場合、前記制御手段で選択されている測位手段によって測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの自機の移動時間を、前記距離演算手段の演算結果と前記移動速度演算手段の演算結果から演算する移動時間演算手段とを有し、前記制御手段は、前記距離演算手段の演算結果が前記第1測位手段の測位の誤差未満である場合には前記第2測位手段を選択し、前記移動時間演算手段により演算された前記移動時間が経過するまでの間は、選択している測位手段による測位を停止し、前記移動時間が経過すると選択している測位手段に測位を行わせ、前記距離演算手段により演算された距離が前記誤差未満の場合には、選択している測位手段に周期的に測位を行わせることを特徴とする測位装置を提供する。
【0012】
また、本発明は、目的地の位置を表す位置情報を記憶する目的地記憶ステップと、自機の位置を測位する測位手段により測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離を演算する距離演算ステップと、前記測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶ステップと、前記距離演算ステップにより演算された距離が定められた距離を超える場合、前記移動位置記憶ステップで記憶された位置情報と時刻情報とに基づいて、前記測位手段で測位された位置における自機の移動速度を演算する移動速度演算ステップと、前記距離演算ステップにより演算された距離が定められた距離を超える場合、前記測位手段によって測位された位置から前記目的地記憶ステップで記憶された位置情報の位置までの自機の移動時間を、前記距離演算ステップの演算結果と前記移動速度演算ステップの演算結果から演算する移動時間演算ステップと、前記移動時間演算ステップにより演算された前記移動時間が経過するまでの間は、前記測位手段による測位を停止し、前記移動時間が経過すると前記測位手段に測位を行わせ、前記距離演算ステップにより演算された距離が定められた距離以下の場合には、前記測位手段に周期的に測位を行わせる制御ステップとを有する測位方法を提供する。
【0013】
また、本発明は、目的地の位置を表す位置情報を記憶する目的地記憶ステップと、自機の位置を測位する第1測位手段と、自機の位置を測位し、測位時の消費電力量が前記第1測位手段より大きく、測位の誤差が前記第1測位手段より小さい第2測位手段のいずれかを選択し、選択した測位手段に測位を行わせる制御ステップと、前記制御ステップで選択されている測位手段により測位された位置から前記目的地記憶ステップで記憶された位置情報の位置までの距離を演算する距離演算ステップと、前記制御手段で選択されている測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶ステップと、前記距離演算ステップにより演算された距離が前記第1測位手段の測位の誤差以上である場合、前記移動位置記憶ステップで記憶された位置情報と時刻情報とに基づいて、前記制御ステップで選択されている測位手段で測位された位置における自機の移動速度を演算する移動速度演算ステップと、前記距離演算ステップにより演算された距離が前記第1測位手段の測位の誤差以上である場合、前記制御ステップで選択されている測位手段によって測位された位置から前記目的地記憶ステップで記憶された位置情報の位置までの自機の移動時間を、前記距離演算ステップの演算結果と前記移動速度演算ステップの演算結果から演算する移動時間演算ステップとを有し、前記制御ステップは、前記距離演算ステップの演算結果が前記第1測位手段の測位の誤差未満である場合には前記第2測位手段を選択し、前記移動時間演算ステップにより演算された前記移動時間が経過するまでの間は、選択している測位手段による測位を停止し、前記移動時間が経過すると選択している測位手段に測位を行わせ、前記距離演算ステップにより演算された距離が前記誤差未満の場合には、選択している測位手段に周期的に測位を行わせることを特徴とする測位方法を提供する。
【発明の効果】
【0014】
本発明によれば、消費電力量を抑えるように測位を行いつつ、目的地の近傍においては移動速度に関わらず位置を測位できる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施形態に係わる通信システム1の全体構成を例示した図。
【図2】携帯端末10のハードウェア構成を示した図。
【図3】測位アプリを実行することにより実現する機能の構成を示したブロック図。
【図4】目的地テーブルTB1の形式の一例を示した図。
【図5】速度テーブルTB2の形式の一例を示した図。
【図6】サーバー装置30のハードウェア構成を示した図。
【図7】基地局テーブルTB3の形式の一例を示した図。
【図8】携帯端末10が行う処理の流れを示したフローチャート。
【図9】携帯端末10Aのハードウェア構成を示した図。
【図10】携帯端末10Aにおいて実現する機能の構成を示したブロック図。
【図11】携帯端末10Aが行う処理の流れを示したフローチャート。
【発明を実施するための形態】
【0016】
[第1実施形態]
(全体構成)
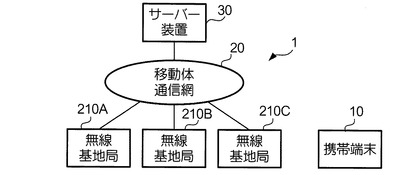
図1は、本発明の第1実施形態に係わる通信システム1の全体構成を例示した図である。移動体通信網20は、本実施形態においてはIMT−2000(International Mobile Telecommunication-2000)に準拠した通信ネットワークである。移動体通信網20は、携帯端末10と無線通信を行う複数の無線基地局210A,210B,210Cを有している。携帯端末10は、IMT−2000に準拠した携帯電話機である。携帯端末10は、移動体通信網20の無線基地局と通信を行い、音声通信やデータ通信を行う。なお、本実施形態に係る携帯端末10は、携帯端末10の位置を測位する機能を有しており、位置を測位する測位装置でもある。サーバー装置30は、移動体通信網20に接続されており、移動体通信網20を介して携帯端末10とデータ通信を行う。なお、移動体通信網20は、多数の無線基地局を有し、無線基地局と通信可能な携帯端末は多数存在するが、図面が繁雑になるのを防ぐために、図1においては携帯端末10と無線基地局210A,201B,210Cのみを示している。
【0017】
(携帯端末10の構成)
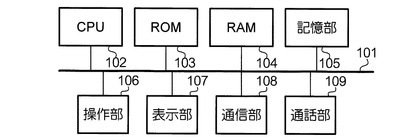
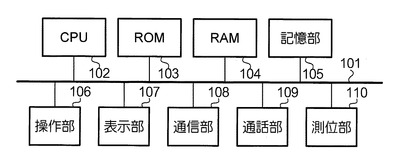
図2は、携帯端末10のハードウェア構成を示した図である。図2に示したように、携帯端末10の各部は、バス101に接続されている。携帯端末10の各部は、このバス101を介して各部間で情報の授受を行う。
通信部108は、無線通信を行うインターフェースとして機能する。通信部108は、CPU(Central Processing Unit)102の制御の下、通信部108に接続されているアンテナ(図示略)を介して、移動体通信網20の無線基地局と無線通信を行い、音声通信やデータ通信を行う。通信部108は、無線基地局から送信された信号を受信すると、音声通信に係る音声信号を通話部109へ出力し、データ通信で得た情報をCPU102へ出力する。また、通信部108は、CPU102から出力された情報が入力されると、この情報を無線基地局へ送信し、通話部109から出力された音声信号が入力されると、この音声信号を無線基地局へ送信する。
通話部109は、マイクとスピーカ(いずれも図示略)を有している。通話部109は、マイクに音声が入力されると、入力された音声を表す音声信号を通信部108へ出力する。また、通話部109では、通信部108から音声信号が入力されると、この音声信号がアナログ信号に変換されてスピーカへ出力され、スピーカから音声が出力される。
【0018】
表示部107は、液晶表示パネルの制御を行う制御回路および液晶表示パネルを有しており、CPU102の制御の下、文字やグラフィック画面、携帯端末10を操作するためのメニュー画面などを液晶表示パネルに表示する。
操作部106は、携帯端末10を操作するための複数のキーを有している。ユーザーが、操作部106のキーを操作すると、操作されたキーを示す信号が操作部106からCPU102へ出力される。CPU102は、操作部106から信号が入力されると、操作されたキーを入力された信号に基づいて特定し、操作されたキーに応じて各部を制御する。
【0019】
記憶部105は、不揮発性メモリを有しており、オペレーティングシステムの機能を実現する基本プログラムや複数のアプリケーションプログラムを記憶する。例えば、記憶部105は、測位した携帯端末10の位置からユーザーが設定した目標位置までの距離を算出し、ユーザーが設定した目的地へ携帯端末10が近づいたことを報知する機能を実現するアプリケーションプログラム(以下、測位アプリと称する)を記憶している。
【0020】
ROM(Read Only Memory)103は、IPL(Initial Program Loader)を記憶している。RAM(Random Access Memory)104は、CPU102がプログラムを実行するときの作業エリアとして使用され、CPU102がプログラムを実行するときに使用するデータが一時的に記憶される。
CPU102は、携帯端末10の各部を制御する装置である。携帯端末10において電源が入れられると、CPU102が、ROM103からIPLを読み出して実行する。CPU102は、IPLを実行した後、記憶部105から基本プログラムを読み出し実行する。CPU102が基本プログラムを実行すると、携帯電話機としての基本機能が実現し、携帯端末10は、音声通信やデータ通信を行うことが可能となる。また、CPU102が基本プログラムを実行すると、アプリケーションプログラムを実行する機能が実現する。例えば、CPU102が、上述した測位アプリを実行すると、図3に示した各種機能が実現し、ユーザーが設定した目的地へ携帯端末10が近づいたことを報知する機能が実現する。
【0021】
(携帯端末10の機能構成)
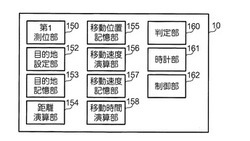
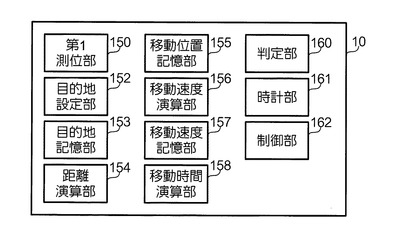
図3は、測位アプリを実行することにより携帯端末10において実現する機能の構成を示したブロック図である。
第1測位部150は、無線基地局から送信される情報を使用して携帯端末10(自機)の位置を測位する。移動体通信網20の無線基地局からは、無線基地局を一意に識別する識別子である基地局識別子が送信される。第1測位部150は、無線基地局から送信される基地局識別子が通信部108において受信されると、受信した基地局識別子を、通信部108を制御してサーバー装置30へ送信する。第1測位部150は、送信した基地局識別子への応答としてサーバー装置30から送信される位置情報が通信部108で受信されると、この位置情報を後述する移動位置記憶部155に記憶させる。なお、サーバー装置から送信される位置情報は、無線基地局がある位置の緯度と経度の情報を有している。第1測位部150は、この緯度と経度で特定される位置を携帯端末10の位置とする。
【0022】
目的地設定部152は、携帯端末10を所持して移動するユーザーの目的地を設定する。目的地設定部152は、本実施形態においては、地図を表す地図情報を記憶しており、この地図情報に基づいて地図の画面を表示部107に表示させる。ユーザーにより操作部106が操作され、地図上において目的地が指定されると、指定された目的地の位置を示す位置情報を目的地記憶部153に記憶させる。
目的地記憶部153は、目的地設定部152で設定された位置を示す位置情報を記憶する。目的地記憶部153は、目的地テーブルTB1に、位置情報が表す緯度と経度とを格納する。図4は、目的地テーブルTB1の形式の一例を示した図である。目的地テーブルTB1は、「緯度」フィールドと「経度」フィールドを有しており、目的地の緯度と経度の情報が格納される。なお、目的地テーブルTB1は、記憶部105に記憶される。
【0023】
距離演算部154は、携帯端末10の位置から目的地までの直線距離を演算する。具体的には、距離演算部154は、第1測位部150で得た位置情報が表す位置から、目的地記憶部153に記憶された位置情報が表す位置までの距離を演算する。
移動位置記憶部155は、携帯端末10が測位を開始してから得た位置情報と、測位を行った日時を示す日時情報とを対応付けて記憶する。なお、各情報は、記憶部105に記憶される。
【0024】
移動速度演算部156は、携帯端末10の移動速度を演算する。移動速度演算部156は、移動位置記憶部155に記憶された位置情報と日時情報とから携帯端末10の移動速度を演算し、演算により得た移動速度を示す速度情報を移動速度記憶部157に記憶させる。
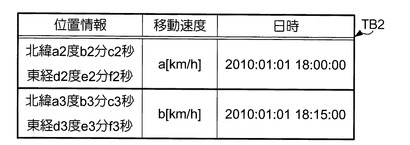
移動速度記憶部157は、移動速度演算部156で得た速度情報と、第1測位部150で得た位置情報と、速度情報を演算した日時の情報とを対応付けて速度テーブルTB2に格納する。図5は、速度テーブルTB2の形式の一例を示した図である。速度テーブルTB2は、「位置情報」のフィールドと、「移動速度」のフィールドと、「日時」のフィールドを有している。「位置情報」のフィールドには、位置情報が格納され、「移動速度」のフィールドには、速度情報が格納される。また、「日時」のフィールドには、日時を表す情報が格納されるが、時刻のみを格納してもよい。なお速度テーブルTB2は、記憶部105に記憶される。
【0025】
移動時間演算部158は、第1測位部150で測位した位置から目的地まで移動するのに要する時間を演算する。移動時間演算部158は、距離演算部154で得た距離を、移動速度演算部156で得た速度で除することにより算出される。なお、移動時間演算部158は、移動時間の下限と上限とを予め記憶しておき、移動時間が下限を下回る場合には下限の時間を移動時間とし、上限を上回る場合には上限の時間を移動時間としてもよい。
判定部160は、携帯端末10が目的地に近づいたか否か判定する。
時計部161は、日時を計り、日時を表す日時情報を生成する。
制御部162は、第1測位部150を制御して第1測位部150に位置の測位を行わせる。
【0026】
(サーバー装置30の構成)
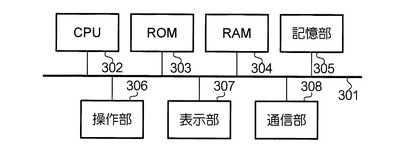
図6は、サーバー装置30のハードウェア構成を例示したブロック図である。図6に示したように、サーバー装置30の各部は、バス301に接続されており、このバス301を介して各部間でデータの授受を行う。
【0027】
通信部308は、データ通信を行うための通信インターフェースである。通信部308は、図示を省略した通信ケーブルにより移動体通信網20に接続される。操作部306は、ユーザーにより操作されるキーボード(図示略)およびマウス(図示略)を有している。操作部306は、マウスまたはキーボードが操作されると、操作されたボタンやキーを示す信号をCPU302へ出力する。表示部307は、液晶ディスプレイを有しており、CPU302の制御の下、文字やグラフィック画面、サーバー装置30を操作するためのメニュー画面等を表示する。
【0028】
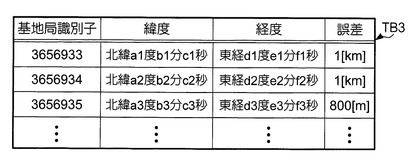
記憶部305は、データを永続的に記憶する装置(例えばハードディスク装置)を有しており、基地局テーブルTB3を記憶している。図7は、基地局テーブルTB3の形式の一例を示した図である。基地局テーブルTB3は、「基地局識別子」フィールド、「緯度」フィールド、「経度」フィールド、および「誤差」フィールドを有している。
「基地局識別子」フィールドには、無線基地局を一意に識別する情報である基地局識別子が格納される。例えば、無線基地局210Aの基地局識別子が「3656933」である場合、図7に示したように、この「3656933」という基地局識別子が格納される。
「緯度」フィールドには、無線基地局が配置されている位置の緯度を示す情報が格納される。例えば、無線基地局210Aの緯度が北緯a1度b1分c1秒である場合、図7に示したように、「3656933」のレコードにおいて、「北緯a1度b1分c1秒」という情報が格納される。
「経度」フィールドには、無線基地局が配置されている位置の経度を示す情報が格納される。例えば、無線基地局210Aの緯度が東経d1度e1分f1秒である場合、図7に示したように、「3656933」のレコードにおいて、「東経d1度e1分f1秒」という情報が格納される。
「誤差」フィールドには、無線基地局の形成するセルにおいて無線基地局の位置からセルの境界までの距離が格納される。例えば、無線基地局210Aについて、無線基地局210Aの位置から半径1kmの範囲がセルの範囲となる場合、「3656933」のレコードにおいて、「誤差」のフィールドに「1[km]」が格納される。
なお、携帯端末10が第1測位部150で測位を行う場合、無線基地局の位置を携帯端末10の位置とする。この場合、無線基地局の位置と携帯端末10の位置とは、最大で「誤差」のフィールドに格納された距離だけずれることとなる。換言すると、「誤差」フィールドに格納されている値は、基地局識別子で携帯端末10の位置を測位する時の誤差(測位誤差)を表すものと言える。
【0029】
また、記憶部305は、サーバー装置30においてオペレーティングシステムの機能を実現する基本プログラムや、複数のアプリケーションプログラムを記憶する。例えば、記憶部305は、基地局識別子を受信すると、受信した基地局識別子に対応付けて記憶されている緯度と経度を表す位置情報および誤差の情報を携帯端末10へ送信する機能を実現するアプリケーションプログラムを記憶している。
【0030】
ROM303は、IPLを記憶している。RAM304は、CPU302がプログラムを実行するときの作業エリアとして使用される。CPU302は、サーバー装置30の各部を制御する装置である。サーバー装置30において電源が入れられると、CPU302が、ROM303からIPLを読み出して実行する。CPU302は、IPLを実行した後、記憶部305から基本プログラムを読み出し実行する。CPU302が基本プログラムを実行すると、サーバー装置30は、クライアントサーバーシステムのサーバーとしての機能し、携帯端末10とデータ通信を行うことが可能となる。また、CPU302が基本プログラムを実行すると、記憶部305に記憶されているアプリケーションプログラムが実行され、基地局識別子を受信し、受信した基地局識別子に対応付けて記憶されている緯度、経度および誤差の情報を携帯端末10へ送信する機能が実現する。
【0031】
(第1実施形態の動作)
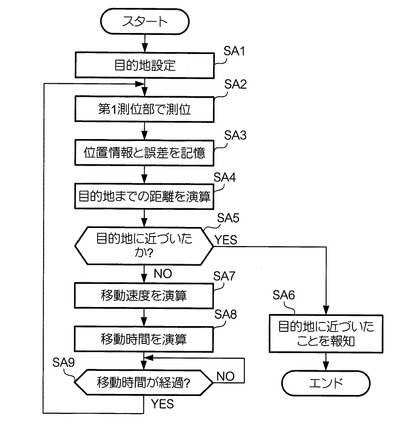
次に、本実施形態に係る携帯端末10の動作について説明する。まず、ユーザーが、測位アプリの実行を指示する操作を操作部106において行うと、測位アプリが実行され、図5に示した各機能が実現する。また、実現した目的地設定部152により地図の画面が表示される。ここで、ユーザーにより操作部106が操作され、表示された地図上において目的地が指定されると、指定された位置を示す位置情報が目的地記憶部153に記憶される(図8:ステップSA1)。
【0032】
目的地記憶部153に目的地の位置情報が格納されると、制御部162が、第1測位部150に測位を行わせ、第1測位部150によって携帯端末10の位置が測位される(ステップSA2)。
具体的には、通信部108が受信している基地局識別子が移動体通信網20を介してサーバー装置30へ送信される。この基地局識別子がサーバー装置30の通信部308において受信されると、CPU302は、受信した基地局識別子と一致する基地局識別子を基地局テーブルTB3において検索する。CPU302は、受信した基地局識別子と一致する基地局識別子が基地局テーブルTB3において存在すると、検索した基地局識別子と同じレコードに格納されている「緯度」の情報と「経度」の情報とを有する位置情報と、同じレコードに格納されている「誤差」の情報を携帯端末10へ送信する。これらの情報が通信部108にて受信されると、第1測位部150は、受信した位置情報と誤差の情報および時計部161で生成されている日時情報を対応付けて移動位置記憶部155に記憶させる(ステップSA3)。
【0033】
次に、距離演算部154が、移動位置記憶部155に記憶された位置情報が表す位置と、目的地記憶部153に記憶された位置情報が表す位置との間の距離(目的地までの距離)を演算する(ステップSA4)。
距離の演算が終了すると、携帯端末10が目的地に近づいたか否かが判定部160により判定される。具体的には、判定部160は、距離演算部154で得た距離がステップSA2で得た誤差の距離以下であるか否か判定し、距離演算部154で得た距離が誤差の距離以下である場合、目的地に到達したと判定する(ステップSA5でYES)。すると、CPU102により表示部107が制御され、目的地に近づいたことを報知する画面が表示される。また、CPU102により通話部109が制御され、スピーカから音を発することにより、目的地に近づいたことがユーザーに報知される(ステップSA6)。
【0034】
一方、目的地に到達したと判定されなかった場合、即ち、距離演算部154で得た距離が誤差の距離を超える場合(ステップSA5でNO)、移動速度演算部156が携帯端末10の移動速度を演算する(ステップSA7)。具体的には、移動速度演算部156は、移動位置記憶部155に記憶されている情報のうち、対応付けられている日時情報が最新のものから順にN個(例えば3個)の位置情報を取得する。移動速度演算部156は、3個の位置情報を取得すると、最新の位置情報が表す位置と最新の1つ前の位置情報が表す位置との間の距離と、この2つの位置情報を測位した日時間の時間差を演算し、この距離と時間差とから、この2つの位置間の移動速度を演算する。また、最新の1つ前の位置情報が表す位置と最新の2つ前の位置情報が表す位置との間の距離と、この2つの位置情報を測位した日時間の時間差を演算し、この距離と時間差とから、この2つの位置間の移動速度を演算する。移動速度演算部156は、この得られた移動速度の平均速度を演算し、得られた速度を携帯端末10の移動速度とする。
【0035】
移動速度が得られると、移動時間演算部158が、現在の位置から目的地までの移動に要する時間を演算する。具体的には、移動時間演算部158は、距離演算部154にて得られた距離を移動速度演算部156にて得られた速度で除し、この除算により得られた時間を、携帯端末10が目的地までの移動に要する時間とする(ステップSA8)。
【0036】
携帯端末10は、移動時間演算部158にて得られた時間の間は、携帯端末10の位置の測位を行わない(ステップS9でNO)。ここで携帯端末10は、時計部161により時刻を計り、移動時間演算部158にて得られた時間が経過すると(ステップSA9でYES)、処理の流れをステップSA2へ戻す。
【0037】
なお、本実施形態においては、目的地設定後に移動位置記憶部155において日時情報がN個以上記憶されるまでの間は、ステップSA3の後に処理の流れをステップSA2へ戻すようにしてもよい。
【0038】
本実施形態によれば、携帯端末10の位置の測位は、周期的に測位が行われるのではなく、目的地までの移動時間を演算し、この演算により得た時間の間は測位が行われない。つまり、目的地に近づくまでの間は、測位が停止されるため、予め定められた間隔で周期的に測位を行う構成と比較して、消費電力量を抑えられる。
【0039】
[第2実施形態]
次に、本発明の第2実施形態について説明する。本発明の第2実施形態の構成は、携帯端末の構成が第1実施形態と異なり、他の構成は第1実施形態と同様である。以下、説明の簡略化のため、第1実施形態と同様の構成については説明を省略し、第2実施形態に係る携帯端末10Aの構成について説明する。
【0040】
図9は、携帯端末10Aのハードウェア構成を示した図である。携帯端末10Aは、測位部110を有している。測位部110は、人工衛星を用いた位置測定システムGPS(Global Positioning System)を利用して携帯端末10Aの位置を測位する。測位部110は、複数の人工衛星から発信される位置測定用の電波を受信すると、それぞれの人工衛星から発信される電波の位相差を基にして携帯端末10Aの位置の緯度および経度を演算する。
【0041】
(携帯端末10Aの機能構成)
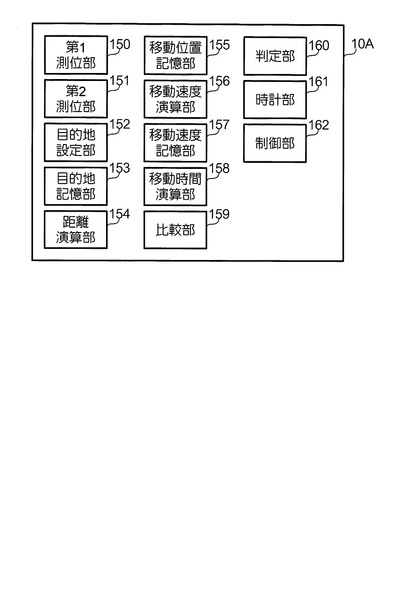
図10は、測位アプリを実行することにより携帯端末10Aにおいて実現する機能の構成を示したブロック図である。
第2測位部151は、測位部110を制御して携帯端末10Aの位置を測位し、測位部110で得られた緯度と経度を表す位置情報を生成する。なお、第2測位部151は、GPSを利用して測位を行うこととなるため、第1測位部150より誤差が小さく、精度よく測位を行うことができる。また、第2測位部151で測位を行う場合、測位部110を駆動して測位を行うため、第1測位部150と比較して、消費電力量が大きくなる。
【0042】
本実施形態に係る距離演算部154は、携帯端末10Aの位置から目的地までの直線距離を演算する。本実施形態に係る距離演算部154は、第1測位部150で得た位置情報または第2測位部151で得た位置情報が表す位置から、目的地記憶部153に記憶された位置情報が表す位置までの距離を演算する。
本実施形態に係る移動速度記憶部157は、移動速度演算部156で得た速度情報と、第1測位部150で得た位置情報または第2測位部151で得た位置情報と、速度情報を演算した日時の情報とを対応付けて速度テーブルTB2に格納する。
【0043】
本実施形態に係る移動時間演算部158は、第1測位部150または第2測位部151で測位した位置から目的地まで移動するのに要する時間を演算する。移動時間は、距離演算部154で得た距離を、移動速度演算部156で得た速度で除することにより算出される。
比較部159は、第1測位部150で測位する時の測位誤差と距離演算部154で得た距離との比較を行う。
本実施形態に係る判定部160は、携帯端末10Aが目的地に到達したか否か判定する。判定部160は、第2測位部151で得た位置情報が表す位置から予め定められた範囲内に目的地があるか否か判定する。なお、本実施形態においては、予め定められた範囲は、位置情報が表す位置から半径15m以内とするが、この範囲に限定されるものではない。
制御部162は、第1測位部150と第2測位部151のいずれかを選択し、選択した測位部に測位を行わせる。
【0044】
(第2実施形態の動作)
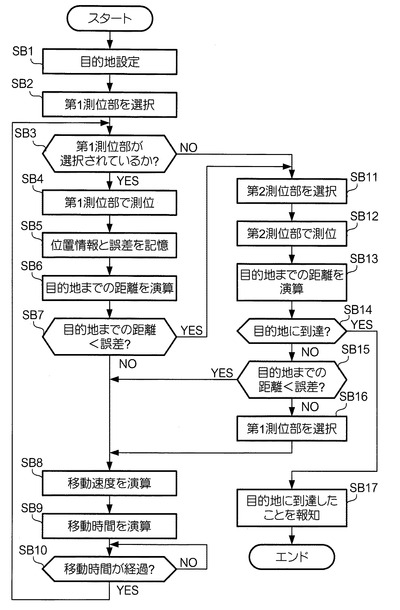
次に、携帯端末10Aの動作について説明する。まず、ユーザーが、測位アプリの実行を指示する操作を操作部106において行うと、測位アプリが実行され、図10に示した各機能が実現する。また、実現した目的地設定部152により地図の画面が表示される。ここで、ユーザーにより操作部106が操作され、表示された地図上において目的地が指定されると、指定された位置を示す位置情報が目的地記憶部153に記憶される(図11:ステップSB1)。
【0045】
目的地記憶部153に目的地の位置情報が格納されると、制御部162が、測位に使用される手段として第1測位部150を選択する(ステップSB2)。なお、測位に使用される手段として第1測位部150が選択されると、測位部110への電力の供給が停止され、消費電力量が抑えられる。次に携帯端末10Aにおいては、測位に使用される手段として選択されている手段が判定される。ここで、第1測位部150と第2測位部151のいずれが選択されているか判定され、第1測位部150が選択されていると判定されると(ステップSB3でYES)、制御部162が、第1測位部150に測位を行わせ、第1測位部150によって携帯端末10Aの位置が測位される(ステップSB4)。
【0046】
具体的には、通信部108が受信している基地局識別子が移動体通信網20を介してサーバー装置30へ送信される。この基地局識別子がサーバー装置30の通信部308において受信されると、CPU302は、受信した基地局識別子と一致する基地局識別子を基地局テーブルTB3において検索する。CPU302は、受信した基地局識別子と一致する基地局識別子が基地局テーブルTB3において存在すると、検索した基地局識別子と同じレコードに格納されている「緯度」の情報と「経度」の情報とを有する位置情報と、同じレコードに格納されている「誤差」の情報を携帯端末10Aへ送信する。この位置情報が通信部108にて受信されると、第1測位部150は、受信した位置情報と誤差の情報および時計部161で生成されている日時情報を対応付けて移動位置記憶部155に記憶させる(ステップSB5)。
【0047】
次に、距離演算部154が、移動位置記憶部155に記憶された位置情報が表す位置と、目的地記憶部153に記憶された位置情報が表す位置との間の距離(目的地までの距離)を演算する(ステップSB6)。距離の演算が終了すると、比較部159が、演算により得られた目的地までの距離と、ステップSB4で得た誤差とを比較する。
【0048】
ここで、目的地までの距離が誤差の距離以上である場合には(ステップSB7でNO)、移動速度演算部156が携帯端末10の移動速度を演算する(ステップSB8)。具体的には、移動速度演算部156は、移動位置記憶部155に記憶されている情報のうち、対応付けられている日時情報が最新のものから順にN個(例えば3個)の位置情報を取得する。移動速度演算部156は、3個の位置情報を取得すると、最新の位置情報が表す位置と最新の1つ前の位置情報が表す位置との間の距離と、この2つの位置情報を測位した日時間の時間差を演算し、この距離と時間差とから、この2つの位置間の移動速度を演算する。また、最新の1つ前の位置情報が表す位置と最新の2つ前の位置情報が表す位置との間の距離と、この2つの位置情報を測位した日時間の時間差を演算し、この距離と時間差とから、この2つの位置間の移動速度を演算する。移動速度演算部156は、この得られた移動速度の平均速度を演算し、得られた速度を携帯端末10Aの移動速度とする。
【0049】
移動速度が得られると、移動時間演算部158が、携帯端末10Aの位置から目的地までの移動に要する時間を演算する。具体的には、移動時間演算部158は、距離演算部154にて得られた距離を移動速度演算部156にて得られた速度で除し、この除算により得られた時間を、携帯端末10Aが目的地までの移動に要する時間とする(ステップSB9)。
【0050】
携帯端末10Aは、移動時間演算部158にて得られた時間の間は、携帯端末10Aの位置の測位を行わない。ここで携帯端末10Aは、時計部161により時刻を計り、移動時間演算部158にて得られた時間が経過すると(ステップSB10でYES)、処理の流れをステップSB3へ戻す。
【0051】
なお、携帯端末10Aが位置しているセル内に目的地があると、無線基地局から携帯端末10Aまでの距離は、誤差の距離未満となるため、ステップSB7においてYESと判定され、制御部162が、測位に使用する手段として第2測位部151を選択する(ステップSB11)。第2測位部151が選択されると測位部110へ電力が供給され、GPSによる測位が可能となる。制御部162は、第2測位部151に測位を行わせ、第2測位部151によって携帯端末10Aの位置が測位される(ステップSB12)。第2測位部151は、測位して得た位置情報と時計部161で生成されている日時情報を対応付けて移動位置記憶部155に記憶させる。
【0052】
次に、距離演算部154が、ステップSB12で得た位置情報が表す位置と、目的地記憶部153に記憶された位置情報が表す位置との間の距離を演算する(ステップSB13)。距離の演算が終了すると、携帯端末10Aが目的地に到達したか否かが判定部160により判定される。具体的には、判定部160は、距離演算部154で得た距離が予め定められた距離以下であるか否か(換言すると、目的地が第2測位部151で測位された位置から予め定められた範囲内にあるか否か)判定する。距離演算部154で得た距離が予め定められた距離以下である場合(ステップSB14でYES)、目的地に到達したと判定される。すると、CPU102により表示部107が制御され、目的地に到達したことを報知する画面が表示される。また、CPU102により通話部109が制御され、スピーカから音を発することにより、目的地に到達したことがユーザーに報知される(ステップSB17)。
一方、距離演算部154で得た距離が予め定められた距離を超える場合(ステップSB14でNO)、比較部159が、ステップSB13で得た距離とステップSB4で得た誤差とを比較する。ここで、距離演算部154で得た距離がステップSB4で得た誤差の距離以上である場合(ステップSB15でNO)、制御部162が、測位に使用する手段として第1測位部150を選択する(ステップSB16)。一方、ステップSB13で得た距離がステップSB4で得た誤差の距離未満である場合(ステップSB15でYES)、測位に使用される手段の変更は行われず、処理の流れがステップSB8へ移される。
【0053】
なお、本実施形態においては、目的地設定後に移動位置記憶部155において日時情報がN個以上記憶されるまでの間は、ステップSB7でNOと判定した後に処理の流れをステップSB3へ戻すようにしてもよい。また、ステップSB15でYESと判定した場合、処理の流れをステップSB11へ戻すようにして周期的に位置を測位するようにしてもよい。
【0054】
本実施形態によれば、携帯端末10Aから目的地までの距離に応じて、測位部110の駆動が制御され消費電力量が抑えられる。また、周期的に測位が行われるのではなく、目的地までの移動時間を演算し、この演算により得た時間の間は測位が行われない。つまり、目的地に近づくまでの間は、測位が停止されるため、予め定められた間隔で周期的に測位を行う構成と比較して、消費電力量を抑えられる。また、携帯端末10Aが目的地に近づくまでは第1測位部150による測位は行われないため、誤差の大きい測位手段によって測位する時間が短くなる。
【0055】
[変形例]
以上、本発明の実施形態について説明したが、本発明は上述した実施形態に限定されることなく、他の様々な形態で実施可能である。例えば、上述の実施形態を以下のように変形して本発明を実施してもよく、各変形例を組み合わせて実施してもよい。
【0056】
上述した実施形態においては、目的地を目的地の緯度と経度で表しているが、緯度と経度で特定される位置から予め定められた範囲内を目的地としてもよい。この場合、緯度と経度で特定される位置から半径n[m]以内を目的地とし、nの値をユーザーが操作部106で設定してもよい。
また、上述した実施形態においては、設定された目的地は一つであり、目的地テーブルTB1は、一つのレコードを有しているが、目的地を複数設定してレコードを複数としてもよい。また、設定した複数の目的地のいずれかをユーザーが操作部106を操作して選択するようにしてもよい。
また、目的地を設定する構成は、上述した構成に限定されるものではない。住所と、住所で特定される位置の緯度および経度とを対応付けた表を測位アプリのデータとして記憶してもよい。そして、測位アプリを実行している時に入力された住所をこの表において検索し、検索した住所に対応付けられている緯度および経度の位置を目的地として設定してもよい。
【0057】
本発明においては、測位部110で携帯端末10Aの高度を測定してもよい。また、携帯端末10Aの位置から目的地までの直線距離を演算する際には、測定した高度も含めて直線距離を演算してもよい。
また、距離演算部154は、携帯端末10Aの位置から目的地までの距離を演算する際、ナビゲーション装置の技術を用いて携帯端末10Aの位置から目的地までの移動経路を演算し、演算した経路の距離を演算するようにしてもよい。
また、第2実施形態に係る距離演算部154は、測位手段として第1測位部150が選択されている場合には、第1測位部150で得た位置情報が表す位置から、目的地記憶部153に記憶された位置情報が表す位置までの距離と、ステップSB4で得た誤差とを加算した距離を、携帯端末10Aから目的地までの距離としてもよい。
また、第2実施形態に係る距離演算部154は、測位手段として第2測位部151が選択されている場合には、第2測位部151で得た位置情報が表す位置から、目的地記憶部153に記憶された位置情報が表す位置までの距離と、測位部110の誤差とを加算した距離を、携帯端末10Aから目的地までの距離としてもよい。なお、測位部110の誤差は、予め携帯端末10Aに記憶させておいてもよい。
【0058】
上述した実施形態においては、移動体通信網20および携帯端末10,10Aは、IMT−2000に準拠したものとなっているが、IMT−2000に限定されるものではなく、移動体通信網20および携帯端末10,10Aが準拠する方式は、他の方式であってもよい。
また、上述した実施形態においては、携帯端末10,10Aは、携帯電話機となっているが、移動体通信網20に接続可能なコンピュータ装置であればよく、例えばPDA(Personal Digital Assistant)やパーソナルコンピュータであってもよい。また、携帯端末10,10Aは、車に搭載されるカーナビゲーション装置や携帯型のナビゲーション装置などの位置を測位する測位装置であってもよい。
上述した実施形態においては、無線基地局は移動体通信網20の無線基地局であるが、公衆無線LAN(Local Area Network)の基地局であってもよく、携帯端末10,10Aは、無線LANに準拠した通信を行う構成であってもよい。
【0059】
上述した実施形態においては、基地局テーブルTB3がサーバー装置30に記憶されているが、基地局テーブルTB3を測位アプリに含めて携帯端末10,10Aに記憶させてもよい。この構成の場合、携帯端末10,10Aは、基地局識別子をサーバー装置30に送信せず、携帯端末10,10Aに記憶されている基地局テーブルTB3を用いて携帯端末10,10Aの位置を特定する。
また、基地局テーブルTB3は、上述した実施形態では緯度と経度を格納しているが、基地局の位置の高度を格納してもよい。この構成の場合、距離演算部154は、基地局テーブルTB3に格納されている高度も含めて演算を行うようにしてもよい。
【0060】
上述した実施形態においては、第1測位部150は、無線基地局の識別子を使用して位置を測位し、第2測位部151は、GPSを使用して位置を測位しているが、各測位部において、位置を測位する方法は、これらの方法に限定されるものではない。例えば、第2測位部151は、GPSを使用して位置を測位するが、衛星を使用して位置を測位する方法(衛星測位システム)であれば、GPSに限定されるものではなく他の方法であってもよい。また、第2測位部151で行う測位の精度が第1測位部150で行う測位の精度より高ければ、第2測位部151が行う測位の方法は、上述した実施形態の測位方法に限定されず、他の測位方法であってもよい。また、第1実施形態において、測位部110を設け、第1測位部150は、測位部110を制御して携帯端末10の位置を測位するようにしてもよい。この構成の場合、ステップSA5においては、目的地までの距離が予め定められた距離以上である場合には、ステップSA7へ処理を進め、目的地までの距離が予め定められた距離未満である場合には、目的地へ到達したか否か判定し、目的地へ到達していない場合には処理の流れをステップSA2へ戻して周期的に位置を測位するようにしてもよい。
【0061】
上述した実施形態においては、速度テーブルTB2は、位置情報を格納しているが、位置情報を得た時に受信していた基地局識別子を格納するようにしてもよい。また、速度テーブルTB2においては、一定個数のレコードを有し、新たに情報を格納する場合には、最も古い日時情報が格納されたレコードを削除してもよい。また、速度テーブルTB2においては、時計部161が計っている日時から一定時間過去の範囲内の日時情報を有するレコードを残し、この範囲外の日時情報を有するレコードを削除してもよい。また、速度テーブルTB2においては、緯度と経度に加えて高度の情報を格納してもよい。
【0062】
本発明においては、移動速度演算部156は、速度テーブルTB2に格納されている位置情報の位置のうち、ステップSB4またはステップSB12で得た位置情報の位置に近いものがある場合、測位した位置に近い位置(例えば、測位した位置から予め定められた範囲内)の位置情報に対応付けられている移動速度を読み出し、読み出した移動速度を、携帯端末10の移動速度としてもよい。
また、測位した位置に近い位置(例えば測位した位置から定められた範囲内の位置)の位置情報に対応付けられている移動速度を1つまたは複数読み出し、読み出した移動速度の相加平均の値を移動速度としてもよい。
また、測位した位置に近い位置の位置情報が対応づけられており、且つ、測位した時刻に近い時刻(測位した時刻から定められた範囲内の時刻)が対応付けられている移動速度を1つまたは複数読み出し、読み出した移動速度の相加平均の値を移動速度としてもよい。
また、複数の移動速度を読み出す場合には、測位して得た位置情報の位置と、読み出した移動速度に対応付けられている位置情報の位置との間の距離に応じて移動速度に重み付けを行い、移動速度の平均を求めるようにしてもよい。
例えば、測位した位置から距離aだけ離れた位置と対応付けられている移動速度と、測位した位置から距離bだけ(b>a)離れた位置と対応付けられている移動速度とを速度テーブルTB2から読み出した場合、測位した位置に近い位置と対応付けられている移動速度ほど重み付けを重くして加重平均を演算するようにしてもよい。
なお、相加平均または加重平均で得た移動速度を、ステップSA2、ステップSB4またはステップSB12で得た位置情報の位置および時計部161が計っている日時と対応付けて移動速度記憶部157に記憶させるようにしてもよい。
【0063】
上述した実施形態においては、測位に使用される手段として第1測位部150が選択されると、測位部110への電力供給が停止されるが、電力の供給を停止しなくてもよい。なお、測位に使用される手段として第1測位部150が選択されており、測位部110への電力供給を停止しない場合、測位部110は位置の測位を停止してもよい。測位部110での測位を停止すれば、測位部110へ電力が供給されていても消費電力量を抑えることができる。
【符号の説明】
【0064】
10,10A・・・携帯端末、20・・・移動体通信網、30・・・サーバー装置、101・・・バス、102・・・CPU、103・・・ROM、104・・・RAM、105・・・記憶部、106・・・操作部、107・・・表示部、108・・・通信部、109・・・通話部、110・・・測位部、150・・・第1測位部、151・・・第2測位部、152・・・目的地設定部、153・・・目的地記憶部、154・・・距離演算部、155・・・移動位置記憶部、156・・・移動速度演算部、157・・・移動速度記憶部、158・・・移動時間演算部、159・・・比較部、160・・・判定部、161・・・時計部、162・・・制御部、210A〜210C・・・無線基地局、301・・・バス、302・・・CPU、303・・・ROM、304・・・RAM、305・・・記憶部、306・・・操作部、307・・・表示部、308・・・通信部
【技術分野】
【0001】
本発明は、位置を測位する技術に関する。
【背景技術】
【0002】
特許文献1には、GPS(Global Positioning System)により位置を測位する移動体端末が記載されている。この移動体端末は、GPSにより現在位置を測位し、所定の監視エリアから現在位置までの距離を算出し、算出した距離に基づいて、次に現在位置を測位する時間を決定する。そして、決定した時間をカウントすると再度GPSにより現在位置を測定する。また、特許文献2には、距離を算出した後に移動体端末の移動速度を求め、所定の範囲に設定されたエリアから現在位置までの距離と、移動速度に基づいて、次に現在位置を測位する時間を決定することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−250853号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に開示された発明は、監視エリアに到達するまでの間においては、決定した時間が経過するまでは測位が停止される。このため、監視エリアに近づいた後で移動速度を上げると、監視エリアに到達したことがすぐに検知できない場合が生じえる。
【0005】
本発明は、上述した背景の下になされたものであり、消費電力量を抑えるように測位を行いつつ、目的地の近傍においては移動速度に関わらず位置を測位できる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決するために本発明は、目的地の位置を表す位置情報を記憶する目的地記憶手段と、自機の位置を測位する測位手段と、前記測位手段により測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離を演算する距離演算手段と、前記測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶手段と、前記距離演算手段により演算された距離が定められた距離を超える場合、前記移動位置記憶手段に記憶された位置情報と時刻情報とに基づいて、前記測位手段で測位された位置における自機の移動速度を演算する移動速度演算手段と、前記距離演算手段により演算された距離が定められた距離を超える場合、前記測位手段によって測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの自機の移動時間を、前記距離演算手段の演算結果と前記移動速度演算手段の演算結果から演算する移動時間演算手段と、前記移動時間演算手段により演算された前記移動時間が経過するまでの間は、前記測位手段による測位を停止し、前記移動時間が経過すると前記測位手段に測位を行わせ、前記距離演算手段により演算された距離が定められた距離以下の場合には、前記測位手段に周期的に測位を行わせる制御手段とを有する測位装置を提供する。
【0007】
本発明においては、前記距離演算手段は、測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離に前記測位手段の測位の誤差を加算する演算を行う構成であってもよい。
【0008】
また、本発明においては、前記測位手段で測位された位置と、当該位置における前記移動速度とを対応付けて記憶する移動速度記憶手段を有し、前記移動速度演算手段は、前記移動速度記憶手段において、前記測位手段で測位された位置から定められた範囲内にある位置と対応付けられている移動速度の相加平均または加重平均を自機の移動速度とし、前記移動速度記憶手段は、相加平均または加重平均から得た移動速度と、前記測位手段により測位された位置とを対応付けて前記移動速度記憶手段に記憶させる構成であってもよい。
【0009】
また、本発明においては、前記測位手段で測位された位置と、当該位置における前記移動速度と、当該移動速度が演算された時刻を対応付けて記憶する移動速度記憶手段を有し、前記移動速度演算手段は、前記移動速度記憶手段において、測位した位置から定められた範囲内にある位置と対応づけられており、且つ、測位した時刻から定められた範囲内の時刻が対応付けられている移動速度の相加平均または加重平均を自機の移動速度とし、前記移動速度記憶手段は、相加平均または加重平均から得た移動速度と、前記測位手段により測位された位置と、相加平均または加重平均から移動速度を得た時の時刻とを対応付けて前記移動速度記憶手段に記憶させる構成であってもよい。
【0010】
また、本発明においては、前記移動時間演算手段は、演算により得た移動時間が予め定められた時間範囲外となる場合、移動時間を当該時間範囲内の時間にする構成であってもよい。
【0011】
また、本発明は、目的地の位置を表す位置情報を記憶する目的地記憶手段と、自機の位置を測位する第1測位手段と、自機の位置を測位し、測位時の消費電力量が前記第1測位手段より大きく、測位の誤差が前記第1測位手段より小さい第2測位手段と、前記第1測位手段と前記第2測位手段のいずれかを選択し、選択した測位手段に測位を行わせる制御手段と、前記制御手段で選択されている測位手段により測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離を演算する距離演算手段と、前記制御手段で選択されている測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶手段と、前記距離演算手段により演算された距離が前記第1測位手段の測位の誤差以上である場合、前記移動位置記憶手段に記憶された位置情報と時刻情報とに基づいて、前記制御手段で選択されている測位手段で測位された位置における自機の移動速度を演算する移動速度演算手段と、前記距離演算手段により演算された距離が前記第1測位手段の測位の誤差以上である場合、前記制御手段で選択されている測位手段によって測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの自機の移動時間を、前記距離演算手段の演算結果と前記移動速度演算手段の演算結果から演算する移動時間演算手段とを有し、前記制御手段は、前記距離演算手段の演算結果が前記第1測位手段の測位の誤差未満である場合には前記第2測位手段を選択し、前記移動時間演算手段により演算された前記移動時間が経過するまでの間は、選択している測位手段による測位を停止し、前記移動時間が経過すると選択している測位手段に測位を行わせ、前記距離演算手段により演算された距離が前記誤差未満の場合には、選択している測位手段に周期的に測位を行わせることを特徴とする測位装置を提供する。
【0012】
また、本発明は、目的地の位置を表す位置情報を記憶する目的地記憶ステップと、自機の位置を測位する測位手段により測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離を演算する距離演算ステップと、前記測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶ステップと、前記距離演算ステップにより演算された距離が定められた距離を超える場合、前記移動位置記憶ステップで記憶された位置情報と時刻情報とに基づいて、前記測位手段で測位された位置における自機の移動速度を演算する移動速度演算ステップと、前記距離演算ステップにより演算された距離が定められた距離を超える場合、前記測位手段によって測位された位置から前記目的地記憶ステップで記憶された位置情報の位置までの自機の移動時間を、前記距離演算ステップの演算結果と前記移動速度演算ステップの演算結果から演算する移動時間演算ステップと、前記移動時間演算ステップにより演算された前記移動時間が経過するまでの間は、前記測位手段による測位を停止し、前記移動時間が経過すると前記測位手段に測位を行わせ、前記距離演算ステップにより演算された距離が定められた距離以下の場合には、前記測位手段に周期的に測位を行わせる制御ステップとを有する測位方法を提供する。
【0013】
また、本発明は、目的地の位置を表す位置情報を記憶する目的地記憶ステップと、自機の位置を測位する第1測位手段と、自機の位置を測位し、測位時の消費電力量が前記第1測位手段より大きく、測位の誤差が前記第1測位手段より小さい第2測位手段のいずれかを選択し、選択した測位手段に測位を行わせる制御ステップと、前記制御ステップで選択されている測位手段により測位された位置から前記目的地記憶ステップで記憶された位置情報の位置までの距離を演算する距離演算ステップと、前記制御手段で選択されている測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶ステップと、前記距離演算ステップにより演算された距離が前記第1測位手段の測位の誤差以上である場合、前記移動位置記憶ステップで記憶された位置情報と時刻情報とに基づいて、前記制御ステップで選択されている測位手段で測位された位置における自機の移動速度を演算する移動速度演算ステップと、前記距離演算ステップにより演算された距離が前記第1測位手段の測位の誤差以上である場合、前記制御ステップで選択されている測位手段によって測位された位置から前記目的地記憶ステップで記憶された位置情報の位置までの自機の移動時間を、前記距離演算ステップの演算結果と前記移動速度演算ステップの演算結果から演算する移動時間演算ステップとを有し、前記制御ステップは、前記距離演算ステップの演算結果が前記第1測位手段の測位の誤差未満である場合には前記第2測位手段を選択し、前記移動時間演算ステップにより演算された前記移動時間が経過するまでの間は、選択している測位手段による測位を停止し、前記移動時間が経過すると選択している測位手段に測位を行わせ、前記距離演算ステップにより演算された距離が前記誤差未満の場合には、選択している測位手段に周期的に測位を行わせることを特徴とする測位方法を提供する。
【発明の効果】
【0014】
本発明によれば、消費電力量を抑えるように測位を行いつつ、目的地の近傍においては移動速度に関わらず位置を測位できる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施形態に係わる通信システム1の全体構成を例示した図。
【図2】携帯端末10のハードウェア構成を示した図。
【図3】測位アプリを実行することにより実現する機能の構成を示したブロック図。
【図4】目的地テーブルTB1の形式の一例を示した図。
【図5】速度テーブルTB2の形式の一例を示した図。
【図6】サーバー装置30のハードウェア構成を示した図。
【図7】基地局テーブルTB3の形式の一例を示した図。
【図8】携帯端末10が行う処理の流れを示したフローチャート。
【図9】携帯端末10Aのハードウェア構成を示した図。
【図10】携帯端末10Aにおいて実現する機能の構成を示したブロック図。
【図11】携帯端末10Aが行う処理の流れを示したフローチャート。
【発明を実施するための形態】
【0016】
[第1実施形態]
(全体構成)
図1は、本発明の第1実施形態に係わる通信システム1の全体構成を例示した図である。移動体通信網20は、本実施形態においてはIMT−2000(International Mobile Telecommunication-2000)に準拠した通信ネットワークである。移動体通信網20は、携帯端末10と無線通信を行う複数の無線基地局210A,210B,210Cを有している。携帯端末10は、IMT−2000に準拠した携帯電話機である。携帯端末10は、移動体通信網20の無線基地局と通信を行い、音声通信やデータ通信を行う。なお、本実施形態に係る携帯端末10は、携帯端末10の位置を測位する機能を有しており、位置を測位する測位装置でもある。サーバー装置30は、移動体通信網20に接続されており、移動体通信網20を介して携帯端末10とデータ通信を行う。なお、移動体通信網20は、多数の無線基地局を有し、無線基地局と通信可能な携帯端末は多数存在するが、図面が繁雑になるのを防ぐために、図1においては携帯端末10と無線基地局210A,201B,210Cのみを示している。
【0017】
(携帯端末10の構成)
図2は、携帯端末10のハードウェア構成を示した図である。図2に示したように、携帯端末10の各部は、バス101に接続されている。携帯端末10の各部は、このバス101を介して各部間で情報の授受を行う。
通信部108は、無線通信を行うインターフェースとして機能する。通信部108は、CPU(Central Processing Unit)102の制御の下、通信部108に接続されているアンテナ(図示略)を介して、移動体通信網20の無線基地局と無線通信を行い、音声通信やデータ通信を行う。通信部108は、無線基地局から送信された信号を受信すると、音声通信に係る音声信号を通話部109へ出力し、データ通信で得た情報をCPU102へ出力する。また、通信部108は、CPU102から出力された情報が入力されると、この情報を無線基地局へ送信し、通話部109から出力された音声信号が入力されると、この音声信号を無線基地局へ送信する。
通話部109は、マイクとスピーカ(いずれも図示略)を有している。通話部109は、マイクに音声が入力されると、入力された音声を表す音声信号を通信部108へ出力する。また、通話部109では、通信部108から音声信号が入力されると、この音声信号がアナログ信号に変換されてスピーカへ出力され、スピーカから音声が出力される。
【0018】
表示部107は、液晶表示パネルの制御を行う制御回路および液晶表示パネルを有しており、CPU102の制御の下、文字やグラフィック画面、携帯端末10を操作するためのメニュー画面などを液晶表示パネルに表示する。
操作部106は、携帯端末10を操作するための複数のキーを有している。ユーザーが、操作部106のキーを操作すると、操作されたキーを示す信号が操作部106からCPU102へ出力される。CPU102は、操作部106から信号が入力されると、操作されたキーを入力された信号に基づいて特定し、操作されたキーに応じて各部を制御する。
【0019】
記憶部105は、不揮発性メモリを有しており、オペレーティングシステムの機能を実現する基本プログラムや複数のアプリケーションプログラムを記憶する。例えば、記憶部105は、測位した携帯端末10の位置からユーザーが設定した目標位置までの距離を算出し、ユーザーが設定した目的地へ携帯端末10が近づいたことを報知する機能を実現するアプリケーションプログラム(以下、測位アプリと称する)を記憶している。
【0020】
ROM(Read Only Memory)103は、IPL(Initial Program Loader)を記憶している。RAM(Random Access Memory)104は、CPU102がプログラムを実行するときの作業エリアとして使用され、CPU102がプログラムを実行するときに使用するデータが一時的に記憶される。
CPU102は、携帯端末10の各部を制御する装置である。携帯端末10において電源が入れられると、CPU102が、ROM103からIPLを読み出して実行する。CPU102は、IPLを実行した後、記憶部105から基本プログラムを読み出し実行する。CPU102が基本プログラムを実行すると、携帯電話機としての基本機能が実現し、携帯端末10は、音声通信やデータ通信を行うことが可能となる。また、CPU102が基本プログラムを実行すると、アプリケーションプログラムを実行する機能が実現する。例えば、CPU102が、上述した測位アプリを実行すると、図3に示した各種機能が実現し、ユーザーが設定した目的地へ携帯端末10が近づいたことを報知する機能が実現する。
【0021】
(携帯端末10の機能構成)
図3は、測位アプリを実行することにより携帯端末10において実現する機能の構成を示したブロック図である。
第1測位部150は、無線基地局から送信される情報を使用して携帯端末10(自機)の位置を測位する。移動体通信網20の無線基地局からは、無線基地局を一意に識別する識別子である基地局識別子が送信される。第1測位部150は、無線基地局から送信される基地局識別子が通信部108において受信されると、受信した基地局識別子を、通信部108を制御してサーバー装置30へ送信する。第1測位部150は、送信した基地局識別子への応答としてサーバー装置30から送信される位置情報が通信部108で受信されると、この位置情報を後述する移動位置記憶部155に記憶させる。なお、サーバー装置から送信される位置情報は、無線基地局がある位置の緯度と経度の情報を有している。第1測位部150は、この緯度と経度で特定される位置を携帯端末10の位置とする。
【0022】
目的地設定部152は、携帯端末10を所持して移動するユーザーの目的地を設定する。目的地設定部152は、本実施形態においては、地図を表す地図情報を記憶しており、この地図情報に基づいて地図の画面を表示部107に表示させる。ユーザーにより操作部106が操作され、地図上において目的地が指定されると、指定された目的地の位置を示す位置情報を目的地記憶部153に記憶させる。
目的地記憶部153は、目的地設定部152で設定された位置を示す位置情報を記憶する。目的地記憶部153は、目的地テーブルTB1に、位置情報が表す緯度と経度とを格納する。図4は、目的地テーブルTB1の形式の一例を示した図である。目的地テーブルTB1は、「緯度」フィールドと「経度」フィールドを有しており、目的地の緯度と経度の情報が格納される。なお、目的地テーブルTB1は、記憶部105に記憶される。
【0023】
距離演算部154は、携帯端末10の位置から目的地までの直線距離を演算する。具体的には、距離演算部154は、第1測位部150で得た位置情報が表す位置から、目的地記憶部153に記憶された位置情報が表す位置までの距離を演算する。
移動位置記憶部155は、携帯端末10が測位を開始してから得た位置情報と、測位を行った日時を示す日時情報とを対応付けて記憶する。なお、各情報は、記憶部105に記憶される。
【0024】
移動速度演算部156は、携帯端末10の移動速度を演算する。移動速度演算部156は、移動位置記憶部155に記憶された位置情報と日時情報とから携帯端末10の移動速度を演算し、演算により得た移動速度を示す速度情報を移動速度記憶部157に記憶させる。
移動速度記憶部157は、移動速度演算部156で得た速度情報と、第1測位部150で得た位置情報と、速度情報を演算した日時の情報とを対応付けて速度テーブルTB2に格納する。図5は、速度テーブルTB2の形式の一例を示した図である。速度テーブルTB2は、「位置情報」のフィールドと、「移動速度」のフィールドと、「日時」のフィールドを有している。「位置情報」のフィールドには、位置情報が格納され、「移動速度」のフィールドには、速度情報が格納される。また、「日時」のフィールドには、日時を表す情報が格納されるが、時刻のみを格納してもよい。なお速度テーブルTB2は、記憶部105に記憶される。
【0025】
移動時間演算部158は、第1測位部150で測位した位置から目的地まで移動するのに要する時間を演算する。移動時間演算部158は、距離演算部154で得た距離を、移動速度演算部156で得た速度で除することにより算出される。なお、移動時間演算部158は、移動時間の下限と上限とを予め記憶しておき、移動時間が下限を下回る場合には下限の時間を移動時間とし、上限を上回る場合には上限の時間を移動時間としてもよい。
判定部160は、携帯端末10が目的地に近づいたか否か判定する。
時計部161は、日時を計り、日時を表す日時情報を生成する。
制御部162は、第1測位部150を制御して第1測位部150に位置の測位を行わせる。
【0026】
(サーバー装置30の構成)
図6は、サーバー装置30のハードウェア構成を例示したブロック図である。図6に示したように、サーバー装置30の各部は、バス301に接続されており、このバス301を介して各部間でデータの授受を行う。
【0027】
通信部308は、データ通信を行うための通信インターフェースである。通信部308は、図示を省略した通信ケーブルにより移動体通信網20に接続される。操作部306は、ユーザーにより操作されるキーボード(図示略)およびマウス(図示略)を有している。操作部306は、マウスまたはキーボードが操作されると、操作されたボタンやキーを示す信号をCPU302へ出力する。表示部307は、液晶ディスプレイを有しており、CPU302の制御の下、文字やグラフィック画面、サーバー装置30を操作するためのメニュー画面等を表示する。
【0028】
記憶部305は、データを永続的に記憶する装置(例えばハードディスク装置)を有しており、基地局テーブルTB3を記憶している。図7は、基地局テーブルTB3の形式の一例を示した図である。基地局テーブルTB3は、「基地局識別子」フィールド、「緯度」フィールド、「経度」フィールド、および「誤差」フィールドを有している。
「基地局識別子」フィールドには、無線基地局を一意に識別する情報である基地局識別子が格納される。例えば、無線基地局210Aの基地局識別子が「3656933」である場合、図7に示したように、この「3656933」という基地局識別子が格納される。
「緯度」フィールドには、無線基地局が配置されている位置の緯度を示す情報が格納される。例えば、無線基地局210Aの緯度が北緯a1度b1分c1秒である場合、図7に示したように、「3656933」のレコードにおいて、「北緯a1度b1分c1秒」という情報が格納される。
「経度」フィールドには、無線基地局が配置されている位置の経度を示す情報が格納される。例えば、無線基地局210Aの緯度が東経d1度e1分f1秒である場合、図7に示したように、「3656933」のレコードにおいて、「東経d1度e1分f1秒」という情報が格納される。
「誤差」フィールドには、無線基地局の形成するセルにおいて無線基地局の位置からセルの境界までの距離が格納される。例えば、無線基地局210Aについて、無線基地局210Aの位置から半径1kmの範囲がセルの範囲となる場合、「3656933」のレコードにおいて、「誤差」のフィールドに「1[km]」が格納される。
なお、携帯端末10が第1測位部150で測位を行う場合、無線基地局の位置を携帯端末10の位置とする。この場合、無線基地局の位置と携帯端末10の位置とは、最大で「誤差」のフィールドに格納された距離だけずれることとなる。換言すると、「誤差」フィールドに格納されている値は、基地局識別子で携帯端末10の位置を測位する時の誤差(測位誤差)を表すものと言える。
【0029】
また、記憶部305は、サーバー装置30においてオペレーティングシステムの機能を実現する基本プログラムや、複数のアプリケーションプログラムを記憶する。例えば、記憶部305は、基地局識別子を受信すると、受信した基地局識別子に対応付けて記憶されている緯度と経度を表す位置情報および誤差の情報を携帯端末10へ送信する機能を実現するアプリケーションプログラムを記憶している。
【0030】
ROM303は、IPLを記憶している。RAM304は、CPU302がプログラムを実行するときの作業エリアとして使用される。CPU302は、サーバー装置30の各部を制御する装置である。サーバー装置30において電源が入れられると、CPU302が、ROM303からIPLを読み出して実行する。CPU302は、IPLを実行した後、記憶部305から基本プログラムを読み出し実行する。CPU302が基本プログラムを実行すると、サーバー装置30は、クライアントサーバーシステムのサーバーとしての機能し、携帯端末10とデータ通信を行うことが可能となる。また、CPU302が基本プログラムを実行すると、記憶部305に記憶されているアプリケーションプログラムが実行され、基地局識別子を受信し、受信した基地局識別子に対応付けて記憶されている緯度、経度および誤差の情報を携帯端末10へ送信する機能が実現する。
【0031】
(第1実施形態の動作)
次に、本実施形態に係る携帯端末10の動作について説明する。まず、ユーザーが、測位アプリの実行を指示する操作を操作部106において行うと、測位アプリが実行され、図5に示した各機能が実現する。また、実現した目的地設定部152により地図の画面が表示される。ここで、ユーザーにより操作部106が操作され、表示された地図上において目的地が指定されると、指定された位置を示す位置情報が目的地記憶部153に記憶される(図8:ステップSA1)。
【0032】
目的地記憶部153に目的地の位置情報が格納されると、制御部162が、第1測位部150に測位を行わせ、第1測位部150によって携帯端末10の位置が測位される(ステップSA2)。
具体的には、通信部108が受信している基地局識別子が移動体通信網20を介してサーバー装置30へ送信される。この基地局識別子がサーバー装置30の通信部308において受信されると、CPU302は、受信した基地局識別子と一致する基地局識別子を基地局テーブルTB3において検索する。CPU302は、受信した基地局識別子と一致する基地局識別子が基地局テーブルTB3において存在すると、検索した基地局識別子と同じレコードに格納されている「緯度」の情報と「経度」の情報とを有する位置情報と、同じレコードに格納されている「誤差」の情報を携帯端末10へ送信する。これらの情報が通信部108にて受信されると、第1測位部150は、受信した位置情報と誤差の情報および時計部161で生成されている日時情報を対応付けて移動位置記憶部155に記憶させる(ステップSA3)。
【0033】
次に、距離演算部154が、移動位置記憶部155に記憶された位置情報が表す位置と、目的地記憶部153に記憶された位置情報が表す位置との間の距離(目的地までの距離)を演算する(ステップSA4)。
距離の演算が終了すると、携帯端末10が目的地に近づいたか否かが判定部160により判定される。具体的には、判定部160は、距離演算部154で得た距離がステップSA2で得た誤差の距離以下であるか否か判定し、距離演算部154で得た距離が誤差の距離以下である場合、目的地に到達したと判定する(ステップSA5でYES)。すると、CPU102により表示部107が制御され、目的地に近づいたことを報知する画面が表示される。また、CPU102により通話部109が制御され、スピーカから音を発することにより、目的地に近づいたことがユーザーに報知される(ステップSA6)。
【0034】
一方、目的地に到達したと判定されなかった場合、即ち、距離演算部154で得た距離が誤差の距離を超える場合(ステップSA5でNO)、移動速度演算部156が携帯端末10の移動速度を演算する(ステップSA7)。具体的には、移動速度演算部156は、移動位置記憶部155に記憶されている情報のうち、対応付けられている日時情報が最新のものから順にN個(例えば3個)の位置情報を取得する。移動速度演算部156は、3個の位置情報を取得すると、最新の位置情報が表す位置と最新の1つ前の位置情報が表す位置との間の距離と、この2つの位置情報を測位した日時間の時間差を演算し、この距離と時間差とから、この2つの位置間の移動速度を演算する。また、最新の1つ前の位置情報が表す位置と最新の2つ前の位置情報が表す位置との間の距離と、この2つの位置情報を測位した日時間の時間差を演算し、この距離と時間差とから、この2つの位置間の移動速度を演算する。移動速度演算部156は、この得られた移動速度の平均速度を演算し、得られた速度を携帯端末10の移動速度とする。
【0035】
移動速度が得られると、移動時間演算部158が、現在の位置から目的地までの移動に要する時間を演算する。具体的には、移動時間演算部158は、距離演算部154にて得られた距離を移動速度演算部156にて得られた速度で除し、この除算により得られた時間を、携帯端末10が目的地までの移動に要する時間とする(ステップSA8)。
【0036】
携帯端末10は、移動時間演算部158にて得られた時間の間は、携帯端末10の位置の測位を行わない(ステップS9でNO)。ここで携帯端末10は、時計部161により時刻を計り、移動時間演算部158にて得られた時間が経過すると(ステップSA9でYES)、処理の流れをステップSA2へ戻す。
【0037】
なお、本実施形態においては、目的地設定後に移動位置記憶部155において日時情報がN個以上記憶されるまでの間は、ステップSA3の後に処理の流れをステップSA2へ戻すようにしてもよい。
【0038】
本実施形態によれば、携帯端末10の位置の測位は、周期的に測位が行われるのではなく、目的地までの移動時間を演算し、この演算により得た時間の間は測位が行われない。つまり、目的地に近づくまでの間は、測位が停止されるため、予め定められた間隔で周期的に測位を行う構成と比較して、消費電力量を抑えられる。
【0039】
[第2実施形態]
次に、本発明の第2実施形態について説明する。本発明の第2実施形態の構成は、携帯端末の構成が第1実施形態と異なり、他の構成は第1実施形態と同様である。以下、説明の簡略化のため、第1実施形態と同様の構成については説明を省略し、第2実施形態に係る携帯端末10Aの構成について説明する。
【0040】
図9は、携帯端末10Aのハードウェア構成を示した図である。携帯端末10Aは、測位部110を有している。測位部110は、人工衛星を用いた位置測定システムGPS(Global Positioning System)を利用して携帯端末10Aの位置を測位する。測位部110は、複数の人工衛星から発信される位置測定用の電波を受信すると、それぞれの人工衛星から発信される電波の位相差を基にして携帯端末10Aの位置の緯度および経度を演算する。
【0041】
(携帯端末10Aの機能構成)
図10は、測位アプリを実行することにより携帯端末10Aにおいて実現する機能の構成を示したブロック図である。
第2測位部151は、測位部110を制御して携帯端末10Aの位置を測位し、測位部110で得られた緯度と経度を表す位置情報を生成する。なお、第2測位部151は、GPSを利用して測位を行うこととなるため、第1測位部150より誤差が小さく、精度よく測位を行うことができる。また、第2測位部151で測位を行う場合、測位部110を駆動して測位を行うため、第1測位部150と比較して、消費電力量が大きくなる。
【0042】
本実施形態に係る距離演算部154は、携帯端末10Aの位置から目的地までの直線距離を演算する。本実施形態に係る距離演算部154は、第1測位部150で得た位置情報または第2測位部151で得た位置情報が表す位置から、目的地記憶部153に記憶された位置情報が表す位置までの距離を演算する。
本実施形態に係る移動速度記憶部157は、移動速度演算部156で得た速度情報と、第1測位部150で得た位置情報または第2測位部151で得た位置情報と、速度情報を演算した日時の情報とを対応付けて速度テーブルTB2に格納する。
【0043】
本実施形態に係る移動時間演算部158は、第1測位部150または第2測位部151で測位した位置から目的地まで移動するのに要する時間を演算する。移動時間は、距離演算部154で得た距離を、移動速度演算部156で得た速度で除することにより算出される。
比較部159は、第1測位部150で測位する時の測位誤差と距離演算部154で得た距離との比較を行う。
本実施形態に係る判定部160は、携帯端末10Aが目的地に到達したか否か判定する。判定部160は、第2測位部151で得た位置情報が表す位置から予め定められた範囲内に目的地があるか否か判定する。なお、本実施形態においては、予め定められた範囲は、位置情報が表す位置から半径15m以内とするが、この範囲に限定されるものではない。
制御部162は、第1測位部150と第2測位部151のいずれかを選択し、選択した測位部に測位を行わせる。
【0044】
(第2実施形態の動作)
次に、携帯端末10Aの動作について説明する。まず、ユーザーが、測位アプリの実行を指示する操作を操作部106において行うと、測位アプリが実行され、図10に示した各機能が実現する。また、実現した目的地設定部152により地図の画面が表示される。ここで、ユーザーにより操作部106が操作され、表示された地図上において目的地が指定されると、指定された位置を示す位置情報が目的地記憶部153に記憶される(図11:ステップSB1)。
【0045】
目的地記憶部153に目的地の位置情報が格納されると、制御部162が、測位に使用される手段として第1測位部150を選択する(ステップSB2)。なお、測位に使用される手段として第1測位部150が選択されると、測位部110への電力の供給が停止され、消費電力量が抑えられる。次に携帯端末10Aにおいては、測位に使用される手段として選択されている手段が判定される。ここで、第1測位部150と第2測位部151のいずれが選択されているか判定され、第1測位部150が選択されていると判定されると(ステップSB3でYES)、制御部162が、第1測位部150に測位を行わせ、第1測位部150によって携帯端末10Aの位置が測位される(ステップSB4)。
【0046】
具体的には、通信部108が受信している基地局識別子が移動体通信網20を介してサーバー装置30へ送信される。この基地局識別子がサーバー装置30の通信部308において受信されると、CPU302は、受信した基地局識別子と一致する基地局識別子を基地局テーブルTB3において検索する。CPU302は、受信した基地局識別子と一致する基地局識別子が基地局テーブルTB3において存在すると、検索した基地局識別子と同じレコードに格納されている「緯度」の情報と「経度」の情報とを有する位置情報と、同じレコードに格納されている「誤差」の情報を携帯端末10Aへ送信する。この位置情報が通信部108にて受信されると、第1測位部150は、受信した位置情報と誤差の情報および時計部161で生成されている日時情報を対応付けて移動位置記憶部155に記憶させる(ステップSB5)。
【0047】
次に、距離演算部154が、移動位置記憶部155に記憶された位置情報が表す位置と、目的地記憶部153に記憶された位置情報が表す位置との間の距離(目的地までの距離)を演算する(ステップSB6)。距離の演算が終了すると、比較部159が、演算により得られた目的地までの距離と、ステップSB4で得た誤差とを比較する。
【0048】
ここで、目的地までの距離が誤差の距離以上である場合には(ステップSB7でNO)、移動速度演算部156が携帯端末10の移動速度を演算する(ステップSB8)。具体的には、移動速度演算部156は、移動位置記憶部155に記憶されている情報のうち、対応付けられている日時情報が最新のものから順にN個(例えば3個)の位置情報を取得する。移動速度演算部156は、3個の位置情報を取得すると、最新の位置情報が表す位置と最新の1つ前の位置情報が表す位置との間の距離と、この2つの位置情報を測位した日時間の時間差を演算し、この距離と時間差とから、この2つの位置間の移動速度を演算する。また、最新の1つ前の位置情報が表す位置と最新の2つ前の位置情報が表す位置との間の距離と、この2つの位置情報を測位した日時間の時間差を演算し、この距離と時間差とから、この2つの位置間の移動速度を演算する。移動速度演算部156は、この得られた移動速度の平均速度を演算し、得られた速度を携帯端末10Aの移動速度とする。
【0049】
移動速度が得られると、移動時間演算部158が、携帯端末10Aの位置から目的地までの移動に要する時間を演算する。具体的には、移動時間演算部158は、距離演算部154にて得られた距離を移動速度演算部156にて得られた速度で除し、この除算により得られた時間を、携帯端末10Aが目的地までの移動に要する時間とする(ステップSB9)。
【0050】
携帯端末10Aは、移動時間演算部158にて得られた時間の間は、携帯端末10Aの位置の測位を行わない。ここで携帯端末10Aは、時計部161により時刻を計り、移動時間演算部158にて得られた時間が経過すると(ステップSB10でYES)、処理の流れをステップSB3へ戻す。
【0051】
なお、携帯端末10Aが位置しているセル内に目的地があると、無線基地局から携帯端末10Aまでの距離は、誤差の距離未満となるため、ステップSB7においてYESと判定され、制御部162が、測位に使用する手段として第2測位部151を選択する(ステップSB11)。第2測位部151が選択されると測位部110へ電力が供給され、GPSによる測位が可能となる。制御部162は、第2測位部151に測位を行わせ、第2測位部151によって携帯端末10Aの位置が測位される(ステップSB12)。第2測位部151は、測位して得た位置情報と時計部161で生成されている日時情報を対応付けて移動位置記憶部155に記憶させる。
【0052】
次に、距離演算部154が、ステップSB12で得た位置情報が表す位置と、目的地記憶部153に記憶された位置情報が表す位置との間の距離を演算する(ステップSB13)。距離の演算が終了すると、携帯端末10Aが目的地に到達したか否かが判定部160により判定される。具体的には、判定部160は、距離演算部154で得た距離が予め定められた距離以下であるか否か(換言すると、目的地が第2測位部151で測位された位置から予め定められた範囲内にあるか否か)判定する。距離演算部154で得た距離が予め定められた距離以下である場合(ステップSB14でYES)、目的地に到達したと判定される。すると、CPU102により表示部107が制御され、目的地に到達したことを報知する画面が表示される。また、CPU102により通話部109が制御され、スピーカから音を発することにより、目的地に到達したことがユーザーに報知される(ステップSB17)。
一方、距離演算部154で得た距離が予め定められた距離を超える場合(ステップSB14でNO)、比較部159が、ステップSB13で得た距離とステップSB4で得た誤差とを比較する。ここで、距離演算部154で得た距離がステップSB4で得た誤差の距離以上である場合(ステップSB15でNO)、制御部162が、測位に使用する手段として第1測位部150を選択する(ステップSB16)。一方、ステップSB13で得た距離がステップSB4で得た誤差の距離未満である場合(ステップSB15でYES)、測位に使用される手段の変更は行われず、処理の流れがステップSB8へ移される。
【0053】
なお、本実施形態においては、目的地設定後に移動位置記憶部155において日時情報がN個以上記憶されるまでの間は、ステップSB7でNOと判定した後に処理の流れをステップSB3へ戻すようにしてもよい。また、ステップSB15でYESと判定した場合、処理の流れをステップSB11へ戻すようにして周期的に位置を測位するようにしてもよい。
【0054】
本実施形態によれば、携帯端末10Aから目的地までの距離に応じて、測位部110の駆動が制御され消費電力量が抑えられる。また、周期的に測位が行われるのではなく、目的地までの移動時間を演算し、この演算により得た時間の間は測位が行われない。つまり、目的地に近づくまでの間は、測位が停止されるため、予め定められた間隔で周期的に測位を行う構成と比較して、消費電力量を抑えられる。また、携帯端末10Aが目的地に近づくまでは第1測位部150による測位は行われないため、誤差の大きい測位手段によって測位する時間が短くなる。
【0055】
[変形例]
以上、本発明の実施形態について説明したが、本発明は上述した実施形態に限定されることなく、他の様々な形態で実施可能である。例えば、上述の実施形態を以下のように変形して本発明を実施してもよく、各変形例を組み合わせて実施してもよい。
【0056】
上述した実施形態においては、目的地を目的地の緯度と経度で表しているが、緯度と経度で特定される位置から予め定められた範囲内を目的地としてもよい。この場合、緯度と経度で特定される位置から半径n[m]以内を目的地とし、nの値をユーザーが操作部106で設定してもよい。
また、上述した実施形態においては、設定された目的地は一つであり、目的地テーブルTB1は、一つのレコードを有しているが、目的地を複数設定してレコードを複数としてもよい。また、設定した複数の目的地のいずれかをユーザーが操作部106を操作して選択するようにしてもよい。
また、目的地を設定する構成は、上述した構成に限定されるものではない。住所と、住所で特定される位置の緯度および経度とを対応付けた表を測位アプリのデータとして記憶してもよい。そして、測位アプリを実行している時に入力された住所をこの表において検索し、検索した住所に対応付けられている緯度および経度の位置を目的地として設定してもよい。
【0057】
本発明においては、測位部110で携帯端末10Aの高度を測定してもよい。また、携帯端末10Aの位置から目的地までの直線距離を演算する際には、測定した高度も含めて直線距離を演算してもよい。
また、距離演算部154は、携帯端末10Aの位置から目的地までの距離を演算する際、ナビゲーション装置の技術を用いて携帯端末10Aの位置から目的地までの移動経路を演算し、演算した経路の距離を演算するようにしてもよい。
また、第2実施形態に係る距離演算部154は、測位手段として第1測位部150が選択されている場合には、第1測位部150で得た位置情報が表す位置から、目的地記憶部153に記憶された位置情報が表す位置までの距離と、ステップSB4で得た誤差とを加算した距離を、携帯端末10Aから目的地までの距離としてもよい。
また、第2実施形態に係る距離演算部154は、測位手段として第2測位部151が選択されている場合には、第2測位部151で得た位置情報が表す位置から、目的地記憶部153に記憶された位置情報が表す位置までの距離と、測位部110の誤差とを加算した距離を、携帯端末10Aから目的地までの距離としてもよい。なお、測位部110の誤差は、予め携帯端末10Aに記憶させておいてもよい。
【0058】
上述した実施形態においては、移動体通信網20および携帯端末10,10Aは、IMT−2000に準拠したものとなっているが、IMT−2000に限定されるものではなく、移動体通信網20および携帯端末10,10Aが準拠する方式は、他の方式であってもよい。
また、上述した実施形態においては、携帯端末10,10Aは、携帯電話機となっているが、移動体通信網20に接続可能なコンピュータ装置であればよく、例えばPDA(Personal Digital Assistant)やパーソナルコンピュータであってもよい。また、携帯端末10,10Aは、車に搭載されるカーナビゲーション装置や携帯型のナビゲーション装置などの位置を測位する測位装置であってもよい。
上述した実施形態においては、無線基地局は移動体通信網20の無線基地局であるが、公衆無線LAN(Local Area Network)の基地局であってもよく、携帯端末10,10Aは、無線LANに準拠した通信を行う構成であってもよい。
【0059】
上述した実施形態においては、基地局テーブルTB3がサーバー装置30に記憶されているが、基地局テーブルTB3を測位アプリに含めて携帯端末10,10Aに記憶させてもよい。この構成の場合、携帯端末10,10Aは、基地局識別子をサーバー装置30に送信せず、携帯端末10,10Aに記憶されている基地局テーブルTB3を用いて携帯端末10,10Aの位置を特定する。
また、基地局テーブルTB3は、上述した実施形態では緯度と経度を格納しているが、基地局の位置の高度を格納してもよい。この構成の場合、距離演算部154は、基地局テーブルTB3に格納されている高度も含めて演算を行うようにしてもよい。
【0060】
上述した実施形態においては、第1測位部150は、無線基地局の識別子を使用して位置を測位し、第2測位部151は、GPSを使用して位置を測位しているが、各測位部において、位置を測位する方法は、これらの方法に限定されるものではない。例えば、第2測位部151は、GPSを使用して位置を測位するが、衛星を使用して位置を測位する方法(衛星測位システム)であれば、GPSに限定されるものではなく他の方法であってもよい。また、第2測位部151で行う測位の精度が第1測位部150で行う測位の精度より高ければ、第2測位部151が行う測位の方法は、上述した実施形態の測位方法に限定されず、他の測位方法であってもよい。また、第1実施形態において、測位部110を設け、第1測位部150は、測位部110を制御して携帯端末10の位置を測位するようにしてもよい。この構成の場合、ステップSA5においては、目的地までの距離が予め定められた距離以上である場合には、ステップSA7へ処理を進め、目的地までの距離が予め定められた距離未満である場合には、目的地へ到達したか否か判定し、目的地へ到達していない場合には処理の流れをステップSA2へ戻して周期的に位置を測位するようにしてもよい。
【0061】
上述した実施形態においては、速度テーブルTB2は、位置情報を格納しているが、位置情報を得た時に受信していた基地局識別子を格納するようにしてもよい。また、速度テーブルTB2においては、一定個数のレコードを有し、新たに情報を格納する場合には、最も古い日時情報が格納されたレコードを削除してもよい。また、速度テーブルTB2においては、時計部161が計っている日時から一定時間過去の範囲内の日時情報を有するレコードを残し、この範囲外の日時情報を有するレコードを削除してもよい。また、速度テーブルTB2においては、緯度と経度に加えて高度の情報を格納してもよい。
【0062】
本発明においては、移動速度演算部156は、速度テーブルTB2に格納されている位置情報の位置のうち、ステップSB4またはステップSB12で得た位置情報の位置に近いものがある場合、測位した位置に近い位置(例えば、測位した位置から予め定められた範囲内)の位置情報に対応付けられている移動速度を読み出し、読み出した移動速度を、携帯端末10の移動速度としてもよい。
また、測位した位置に近い位置(例えば測位した位置から定められた範囲内の位置)の位置情報に対応付けられている移動速度を1つまたは複数読み出し、読み出した移動速度の相加平均の値を移動速度としてもよい。
また、測位した位置に近い位置の位置情報が対応づけられており、且つ、測位した時刻に近い時刻(測位した時刻から定められた範囲内の時刻)が対応付けられている移動速度を1つまたは複数読み出し、読み出した移動速度の相加平均の値を移動速度としてもよい。
また、複数の移動速度を読み出す場合には、測位して得た位置情報の位置と、読み出した移動速度に対応付けられている位置情報の位置との間の距離に応じて移動速度に重み付けを行い、移動速度の平均を求めるようにしてもよい。
例えば、測位した位置から距離aだけ離れた位置と対応付けられている移動速度と、測位した位置から距離bだけ(b>a)離れた位置と対応付けられている移動速度とを速度テーブルTB2から読み出した場合、測位した位置に近い位置と対応付けられている移動速度ほど重み付けを重くして加重平均を演算するようにしてもよい。
なお、相加平均または加重平均で得た移動速度を、ステップSA2、ステップSB4またはステップSB12で得た位置情報の位置および時計部161が計っている日時と対応付けて移動速度記憶部157に記憶させるようにしてもよい。
【0063】
上述した実施形態においては、測位に使用される手段として第1測位部150が選択されると、測位部110への電力供給が停止されるが、電力の供給を停止しなくてもよい。なお、測位に使用される手段として第1測位部150が選択されており、測位部110への電力供給を停止しない場合、測位部110は位置の測位を停止してもよい。測位部110での測位を停止すれば、測位部110へ電力が供給されていても消費電力量を抑えることができる。
【符号の説明】
【0064】
10,10A・・・携帯端末、20・・・移動体通信網、30・・・サーバー装置、101・・・バス、102・・・CPU、103・・・ROM、104・・・RAM、105・・・記憶部、106・・・操作部、107・・・表示部、108・・・通信部、109・・・通話部、110・・・測位部、150・・・第1測位部、151・・・第2測位部、152・・・目的地設定部、153・・・目的地記憶部、154・・・距離演算部、155・・・移動位置記憶部、156・・・移動速度演算部、157・・・移動速度記憶部、158・・・移動時間演算部、159・・・比較部、160・・・判定部、161・・・時計部、162・・・制御部、210A〜210C・・・無線基地局、301・・・バス、302・・・CPU、303・・・ROM、304・・・RAM、305・・・記憶部、306・・・操作部、307・・・表示部、308・・・通信部
【特許請求の範囲】
【請求項1】
目的地の位置を表す位置情報を記憶する目的地記憶手段と、
自機の位置を測位する測位手段と、
前記測位手段により測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離を演算する距離演算手段と、
前記測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶手段と、
前記距離演算手段により演算された距離が定められた距離を超える場合、前記移動位置記憶手段に記憶された位置情報と時刻情報とに基づいて、前記測位手段で測位された位置における自機の移動速度を演算する移動速度演算手段と、
前記距離演算手段により演算された距離が定められた距離を超える場合、前記測位手段によって測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの自機の移動時間を、前記距離演算手段の演算結果と前記移動速度演算手段の演算結果から演算する移動時間演算手段と、
前記移動時間演算手段により演算された前記移動時間が経過するまでの間は、前記測位手段による測位を停止し、前記移動時間が経過すると前記測位手段に測位を行わせ、前記距離演算手段により演算された距離が定められた距離以下の場合には、前記測位手段に周期的に測位を行わせる制御手段と
を有する測位装置。
【請求項2】
前記距離演算手段は、測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離に前記測位手段の測位の誤差を加算する演算を行うことを特徴とする請求項1に記載の測位装置。
【請求項3】
前記測位手段で測位された位置と、当該位置における前記移動速度とを対応付けて記憶する移動速度記憶手段を有し、
前記移動速度演算手段は、前記移動速度記憶手段において、前記測位手段で測位された位置から定められた範囲内にある位置と対応付けられている移動速度の相加平均または加重平均を自機の移動速度とし、
前記移動速度記憶手段は、相加平均または加重平均から得た移動速度と、前記測位手段により測位された位置とを対応付けて前記移動速度記憶手段に記憶させること
を特徴とする請求項1または請求項2に記載の測位装置。
【請求項4】
前記測位手段で測位された位置と、当該位置における前記移動速度と、当該移動速度が演算された時刻を対応付けて記憶する移動速度記憶手段を有し、
前記移動速度演算手段は、前記移動速度記憶手段において、測位した位置から定められた範囲内にある位置と対応づけられており、且つ、測位した時刻から定められた範囲内の時刻が対応付けられている移動速度の相加平均または加重平均を自機の移動速度とし、
前記移動速度記憶手段は、相加平均または加重平均から得た移動速度と、前記測位手段により測位された位置と、相加平均または加重平均から移動速度を得た時の時刻とを対応付けて前記移動速度記憶手段に記憶させること
を特徴とする請求項1または請求項2に記載の測位装置。
【請求項5】
前記移動時間演算手段は、演算により得た移動時間が予め定められた時間範囲外となる場合、移動時間を当該時間範囲内の時間にすることを特徴とする請求項1乃至請求項4のいずれかに記載の測位装置。
【請求項6】
目的地の位置を表す位置情報を記憶する目的地記憶手段と、
自機の位置を測位する第1測位手段と、
自機の位置を測位し、測位時の消費電力量が前記第1測位手段より大きく、測位の誤差が前記第1測位手段より小さい第2測位手段と、
前記第1測位手段と前記第2測位手段のいずれかを選択し、選択した測位手段に測位を行わせる制御手段と、
前記制御手段で選択されている測位手段により測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離を演算する距離演算手段と、
前記制御手段で選択されている測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶手段と、
前記距離演算手段により演算された距離が前記第1測位手段の測位の誤差以上である場合、前記移動位置記憶手段に記憶された位置情報と時刻情報とに基づいて、前記制御手段で選択されている測位手段で測位された位置における自機の移動速度を演算する移動速度演算手段と、
前記距離演算手段により演算された距離が前記第1測位手段の測位の誤差以上である場合、前記制御手段で選択されている測位手段によって測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの自機の移動時間を、前記距離演算手段の演算結果と前記移動速度演算手段の演算結果から演算する移動時間演算手段と
を有し、
前記制御手段は、前記距離演算手段の演算結果が前記第1測位手段の測位の誤差未満である場合には前記第2測位手段を選択し、前記移動時間演算手段により演算された前記移動時間が経過するまでの間は、選択している測位手段による測位を停止し、前記移動時間が経過すると選択している測位手段に測位を行わせ、前記距離演算手段により演算された距離が前記誤差未満の場合には、選択している測位手段に周期的に測位を行わせること
を特徴とする測位装置。
【請求項7】
目的地の位置を表す位置情報を記憶する目的地記憶ステップと、
自機の位置を測位する測位手段により測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離を演算する距離演算ステップと、
前記測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶ステップと、
前記距離演算ステップにより演算された距離が定められた距離を超える場合、前記移動位置記憶ステップで記憶された位置情報と時刻情報とに基づいて、前記測位手段で測位された位置における自機の移動速度を演算する移動速度演算ステップと、
前記距離演算ステップにより演算された距離が定められた距離を超える場合、前記測位手段によって測位された位置から前記目的地記憶ステップで記憶された位置情報の位置までの自機の移動時間を、前記距離演算ステップの演算結果と前記移動速度演算ステップの演算結果から演算する移動時間演算ステップと、
前記移動時間演算ステップにより演算された前記移動時間が経過するまでの間は、前記測位手段による測位を停止し、前記移動時間が経過すると前記測位手段に測位を行わせ、前記距離演算ステップにより演算された距離が定められた距離以下の場合には、前記測位手段に周期的に測位を行わせる制御ステップと
を有する測位方法。
【請求項8】
目的地の位置を表す位置情報を記憶する目的地記憶ステップと、
自機の位置を測位する第1測位手段と、自機の位置を測位し、測位時の消費電力量が前記第1測位手段より大きく、測位の誤差が前記第1測位手段より小さい第2測位手段のいずれかを選択し、選択した測位手段に測位を行わせる制御ステップと、
前記制御ステップで選択されている測位手段により測位された位置から前記目的地記憶ステップで記憶された位置情報の位置までの距離を演算する距離演算ステップと、
前記制御手段で選択されている測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶ステップと、
前記距離演算ステップにより演算された距離が前記第1測位手段の測位の誤差以上である場合、前記移動位置記憶ステップで記憶された位置情報と時刻情報とに基づいて、前記制御ステップで選択されている測位手段で測位された位置における自機の移動速度を演算する移動速度演算ステップと、
前記距離演算ステップにより演算された距離が前記第1測位手段の測位の誤差以上である場合、前記制御ステップで選択されている測位手段によって測位された位置から前記目的地記憶ステップで記憶された位置情報の位置までの自機の移動時間を、前記距離演算ステップの演算結果と前記移動速度演算ステップの演算結果から演算する移動時間演算ステップと
を有し、
前記制御ステップは、前記距離演算ステップの演算結果が前記第1測位手段の測位の誤差未満である場合には前記第2測位手段を選択し、前記移動時間演算ステップにより演算された前記移動時間が経過するまでの間は、選択している測位手段による測位を停止し、前記移動時間が経過すると選択している測位手段に測位を行わせ、前記距離演算ステップにより演算された距離が前記誤差未満の場合には、選択している測位手段に周期的に測位を行わせること
を特徴とする測位方法。
【請求項1】
目的地の位置を表す位置情報を記憶する目的地記憶手段と、
自機の位置を測位する測位手段と、
前記測位手段により測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離を演算する距離演算手段と、
前記測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶手段と、
前記距離演算手段により演算された距離が定められた距離を超える場合、前記移動位置記憶手段に記憶された位置情報と時刻情報とに基づいて、前記測位手段で測位された位置における自機の移動速度を演算する移動速度演算手段と、
前記距離演算手段により演算された距離が定められた距離を超える場合、前記測位手段によって測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの自機の移動時間を、前記距離演算手段の演算結果と前記移動速度演算手段の演算結果から演算する移動時間演算手段と、
前記移動時間演算手段により演算された前記移動時間が経過するまでの間は、前記測位手段による測位を停止し、前記移動時間が経過すると前記測位手段に測位を行わせ、前記距離演算手段により演算された距離が定められた距離以下の場合には、前記測位手段に周期的に測位を行わせる制御手段と
を有する測位装置。
【請求項2】
前記距離演算手段は、測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離に前記測位手段の測位の誤差を加算する演算を行うことを特徴とする請求項1に記載の測位装置。
【請求項3】
前記測位手段で測位された位置と、当該位置における前記移動速度とを対応付けて記憶する移動速度記憶手段を有し、
前記移動速度演算手段は、前記移動速度記憶手段において、前記測位手段で測位された位置から定められた範囲内にある位置と対応付けられている移動速度の相加平均または加重平均を自機の移動速度とし、
前記移動速度記憶手段は、相加平均または加重平均から得た移動速度と、前記測位手段により測位された位置とを対応付けて前記移動速度記憶手段に記憶させること
を特徴とする請求項1または請求項2に記載の測位装置。
【請求項4】
前記測位手段で測位された位置と、当該位置における前記移動速度と、当該移動速度が演算された時刻を対応付けて記憶する移動速度記憶手段を有し、
前記移動速度演算手段は、前記移動速度記憶手段において、測位した位置から定められた範囲内にある位置と対応づけられており、且つ、測位した時刻から定められた範囲内の時刻が対応付けられている移動速度の相加平均または加重平均を自機の移動速度とし、
前記移動速度記憶手段は、相加平均または加重平均から得た移動速度と、前記測位手段により測位された位置と、相加平均または加重平均から移動速度を得た時の時刻とを対応付けて前記移動速度記憶手段に記憶させること
を特徴とする請求項1または請求項2に記載の測位装置。
【請求項5】
前記移動時間演算手段は、演算により得た移動時間が予め定められた時間範囲外となる場合、移動時間を当該時間範囲内の時間にすることを特徴とする請求項1乃至請求項4のいずれかに記載の測位装置。
【請求項6】
目的地の位置を表す位置情報を記憶する目的地記憶手段と、
自機の位置を測位する第1測位手段と、
自機の位置を測位し、測位時の消費電力量が前記第1測位手段より大きく、測位の誤差が前記第1測位手段より小さい第2測位手段と、
前記第1測位手段と前記第2測位手段のいずれかを選択し、選択した測位手段に測位を行わせる制御手段と、
前記制御手段で選択されている測位手段により測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離を演算する距離演算手段と、
前記制御手段で選択されている測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶手段と、
前記距離演算手段により演算された距離が前記第1測位手段の測位の誤差以上である場合、前記移動位置記憶手段に記憶された位置情報と時刻情報とに基づいて、前記制御手段で選択されている測位手段で測位された位置における自機の移動速度を演算する移動速度演算手段と、
前記距離演算手段により演算された距離が前記第1測位手段の測位の誤差以上である場合、前記制御手段で選択されている測位手段によって測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの自機の移動時間を、前記距離演算手段の演算結果と前記移動速度演算手段の演算結果から演算する移動時間演算手段と
を有し、
前記制御手段は、前記距離演算手段の演算結果が前記第1測位手段の測位の誤差未満である場合には前記第2測位手段を選択し、前記移動時間演算手段により演算された前記移動時間が経過するまでの間は、選択している測位手段による測位を停止し、前記移動時間が経過すると選択している測位手段に測位を行わせ、前記距離演算手段により演算された距離が前記誤差未満の場合には、選択している測位手段に周期的に測位を行わせること
を特徴とする測位装置。
【請求項7】
目的地の位置を表す位置情報を記憶する目的地記憶ステップと、
自機の位置を測位する測位手段により測位された位置から前記目的地記憶手段に記憶されている位置情報の位置までの距離を演算する距離演算ステップと、
前記測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶ステップと、
前記距離演算ステップにより演算された距離が定められた距離を超える場合、前記移動位置記憶ステップで記憶された位置情報と時刻情報とに基づいて、前記測位手段で測位された位置における自機の移動速度を演算する移動速度演算ステップと、
前記距離演算ステップにより演算された距離が定められた距離を超える場合、前記測位手段によって測位された位置から前記目的地記憶ステップで記憶された位置情報の位置までの自機の移動時間を、前記距離演算ステップの演算結果と前記移動速度演算ステップの演算結果から演算する移動時間演算ステップと、
前記移動時間演算ステップにより演算された前記移動時間が経過するまでの間は、前記測位手段による測位を停止し、前記移動時間が経過すると前記測位手段に測位を行わせ、前記距離演算ステップにより演算された距離が定められた距離以下の場合には、前記測位手段に周期的に測位を行わせる制御ステップと
を有する測位方法。
【請求項8】
目的地の位置を表す位置情報を記憶する目的地記憶ステップと、
自機の位置を測位する第1測位手段と、自機の位置を測位し、測位時の消費電力量が前記第1測位手段より大きく、測位の誤差が前記第1測位手段より小さい第2測位手段のいずれかを選択し、選択した測位手段に測位を行わせる制御ステップと、
前記制御ステップで選択されている測位手段により測位された位置から前記目的地記憶ステップで記憶された位置情報の位置までの距離を演算する距離演算ステップと、
前記制御手段で選択されている測位手段により測位された位置を表す位置情報と、当該位置を測位した時刻を表す時刻情報とを対応付けて記憶する移動位置記憶ステップと、
前記距離演算ステップにより演算された距離が前記第1測位手段の測位の誤差以上である場合、前記移動位置記憶ステップで記憶された位置情報と時刻情報とに基づいて、前記制御ステップで選択されている測位手段で測位された位置における自機の移動速度を演算する移動速度演算ステップと、
前記距離演算ステップにより演算された距離が前記第1測位手段の測位の誤差以上である場合、前記制御ステップで選択されている測位手段によって測位された位置から前記目的地記憶ステップで記憶された位置情報の位置までの自機の移動時間を、前記距離演算ステップの演算結果と前記移動速度演算ステップの演算結果から演算する移動時間演算ステップと
を有し、
前記制御ステップは、前記距離演算ステップの演算結果が前記第1測位手段の測位の誤差未満である場合には前記第2測位手段を選択し、前記移動時間演算ステップにより演算された前記移動時間が経過するまでの間は、選択している測位手段による測位を停止し、前記移動時間が経過すると選択している測位手段に測位を行わせ、前記距離演算ステップにより演算された距離が前記誤差未満の場合には、選択している測位手段に周期的に測位を行わせること
を特徴とする測位方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−252721(P2011−252721A)
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願番号】特願2010−125009(P2010−125009)
【出願日】平成22年5月31日(2010.5.31)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願日】平成22年5月31日(2010.5.31)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
[ Back to top ]