
測位装置及び測位方法

【課題】衛星電波を利用した受信機の速度の算出精度を向上させる。
【解決手段】衛星電波を利用した位置算出に用いた衛星群を、アンカーセットASとし(ステップS61)、このアンカーセットASとこれに含まれない非アンカー衛星NSVaとからなる組み合わせの異なる拡張セットTSを生成し、速度の算出精度が最良の拡張セットTSを特定する(ステップS62)。アンカーセットASの何れかの衛星を用いて組み合わせの異なる排他セットRSを生成し、速度の算出精度が最良の排他セットRSを特定する(ステップS63)。特定した最良の拡張セット及び最良の排他セットのうち、その速度の算出精度がより良い方を速度算出用セットとし、この速度算出用セットを構成する衛星の周波数精度に応じて重み付けを行い、これに基づき衛星電波受信機1の速度演算を行う(ステップS64、S65)。
【解決手段】衛星電波を利用した位置算出に用いた衛星群を、アンカーセットASとし(ステップS61)、このアンカーセットASとこれに含まれない非アンカー衛星NSVaとからなる組み合わせの異なる拡張セットTSを生成し、速度の算出精度が最良の拡張セットTSを特定する(ステップS62)。アンカーセットASの何れかの衛星を用いて組み合わせの異なる排他セットRSを生成し、速度の算出精度が最良の排他セットRSを特定する(ステップS63)。特定した最良の拡張セット及び最良の排他セットのうち、その速度の算出精度がより良い方を速度算出用セットとし、この速度算出用セットを構成する衛星の周波数精度に応じて重み付けを行い、これに基づき衛星電波受信機1の速度演算を行う(ステップS64、S65)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測位装置及び測位方法に関し、特に、GPS(グローバルポジショニングシステム)に適用して好適なものである。
【背景技術】
【0002】
GPS衛星を利用した測位技術は、自動車のナビゲーションシステムを始め、社会のあらゆる分野に利用されている。
しかしながら、特に、都心部や、高架下等、遮蔽物の多い場所においては、GPS受信機を移動させるとその移動に伴って、GPS受信機で捕捉できる衛星数と衛星の配置とが変化する。このため、GPS受信機での位置計算結果の連続性が失われることから、位置推定精度が劣化することがある。したがって、GPS衛星を利用する測位方法では、測位装置のばらつきを低減させるために、GPS受信機の移動速度を用いて測位結果のフィルタリング処理を行う、位置/速度の平滑化がよく知られている。
【0003】
例えば、特許文献1には、時間遅れを生じることなく、測位位置のばらつきに対してより正しい現在位置を検出するために、車両の測位位置及び速度ベクトルを検出し、速度ベクトル及び現在位置により、次回の処理タイミングでの車両の位置を推定し、この推定位置と次回の処理タイミングでの車両の測位位置との平均化処理に基づいて現在位置を更新する方法が開示されている。
【0004】
また、特許文献2には、移動速さについても移動方位についても、良好な演算結果を得ることができるようにするために、GPS衛星からの電波を受信してGPS受信装置の現在位置を原点とする移動速度を求め、求めた移動速度と1サンプリング期間前の移動速度との差に重み定数を乗算した値に基づいて移動速度の雑音成分を低減し、この雑音成分が低減された移動速度に基づいてGPS受信装置の移動方位を演算する方法が開示されている。
【0005】
また、位置推定速度の向上を図るため、測位演算に用いる衛星の組み合わせの中から、最も精度よく位置測定を行うことの可能な衛星の組み合わせを選択し、この衛星の組み合わせを用いて測位演算を行うもの等も提案されている(特許文献3)。
【特許文献1】特開平8−68651号公報
【特許文献2】特開平8−62320号公報
【特許文献3】特開平6−265626号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
一般に、GPS受信装置の速度算出を行う場合、位置計測に用いた衛星の受信電波に基づいて速度算出を行うようにしているが、位置推定に適したGPS衛星は、擬似距離の算出精度がよい衛星であるのに対し、速度推定に適したGPS衛星は、周波数の検出精度がよい衛星であるため、位置推定に適したGPS衛星が、必ずしも、速度推定に適したGPS衛星であるとは限らない。このため、位置計測に適したGPS衛星を選択し、これに基づいて位置推定を行うと共に速度推定を行った場合、位置精度の向上を図ることはできるものの、必ずしも速度精度の向上を図ることはできない可能性がある。したがって、上述のように、位置及び速度の平滑化を行ったとしても、位置精度の向上を十分図ることができない可能性がある。
【0007】
そこで、この発明は、上記従来の未解決の問題に着目してなされたものであり、速度の検出精度の向上を図ることの可能な測位装置及び測位方法を提供することを目的としている。
【課題を解決するための手段】
【0008】
上記した課題を解決するために、本発明の測位装置は、衛星からの電波を受信する受信機と、少なくとも4個以上の衛星を含む前記受信機の位置検出用の衛星群を、基本セットとして設定する基本セット設定手段と、当該基本セット設定手段で設定した基本セットを少なくとも含む複数の衛星で構成され且つその組み合わせの異なる1以上の拡張セットを生成する拡張セット生成手段と、当該拡張セット生成手段で生成した拡張セットそれぞれについて該拡張セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる拡張セットを選択する拡張セット選択手段と、当該拡張セット選択手段で選択した拡張セットを速度算出用セットとし、当該速度算出用セットに基づく前記速度を、前記受信機の速度として出力する受信機速度出力手段と、を備えることを特徴としている。
【0009】
ここで、受信機の位置の算出精度は衛星との間の擬似距離に依存するのに対し、速度の算出精度は周波数精度に依存するため、位置検出用の衛星群からなる基本セットを用いて速度算出を行うことで速度の算出精度をある程度確保することはできるものの、基本セットには、速度算出に適していない衛星が含まれる可能性もある。
しかしながら、上記構成によれば、少なくとも基本セットを含む複数の衛星で構成され且つ組み合わせの異なる衛星からなる拡張セットのうち、その速度の算出精度が最良となる拡張セットを速度算出用セットとして選択し、すなわち、基本セットの他に、速度の算出精度の向上に寄与する衛星がある場合にはこれを基本セットに加え、これを用いて速度を算出するから、速度の算出精度をより向上させることができ、より高精度な速度の算出結果を得ることができる。
【0010】
また、本発明の測位装置は、衛星からの電波を受信する受信機と、少なくとも4個以上の衛星を含む前記受信機の位置検出用の衛星群を、基本セットとして設定する基本セット設定手段と、当該基本セット設定手段で設定した基本セットに含まれる4個以上の衛星で構成され且つその組み合わせの異なる1以上の排他セットを生成する排他セット生成手段と、当該排他セット生成手段で生成した排他セットそれぞれについて該排他セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる排他セットを選択する排他セット選択手段と、当該排他セット選択手段で選択した排他セットを速度算出用セットとし、当該速度算出用セットに基づく前記速度を、前記受信機の速度として出力する受信機速度出力手段と、を備えることを特徴としている。
【0011】
ここで、受信機の位置の算出精度は衛星との間の擬似距離に依存するのに対し、速度の算出精度は周波数精度に依存するため、位置検出用の衛星群からなる基本セットを用いて速度算出を行うことにより速度の算出精度をある程度確保することはできるものの、基本セットには、速度算出に適していない衛星が含まれる可能性もある。
しかしながら、上記構成によれば、基本セットを構成する衛星の何れかで構成され且つ組み合わせの異なる排他セットのうち、その速度の算出精度が最良となる排他セットを速度算出用セットとして選択し、すなわち、基本セットの中に、速度の算出精度に悪影響を及ぼす衛星がある場合にはこれを基本セットから除去し、残った衛星を用いて速度を算出するから、速度の算出精度の低下を抑制することができ、より高精度な速度の算出結果を得ることができる。
【0012】
また、本発明の測位装置は、衛星からの電波を受信する受信機と、少なくとも4個以上の衛星を含む前記受信機の位置検出用の衛星群を、基本セットとして設定する基本セット設定手段と、当該基本セット設定手段で設定した基本セットを少なくとも含む複数の衛星で構成され且つその組み合わせの異なる1以上の拡張セットを生成する拡張セット生成手段と、当該拡張セット生成手段で生成した拡張セットそれぞれについて該拡張セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる拡張セットを選択する拡張セット選択手段と、前記基本セット設定手段で設定した基本セットに含まれる4個以上の衛星で構成され且つその組み合わせの異なる1以上の排他セットを生成する排他セット生成手段と、当該排他セット生成手段で生成した排他セットそれぞれについて該排他セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる排他セットを選択する排他セット選択手段と、前記拡張セット選択手段で選択した拡張セット及び前記排他セット選択手段で選択した排他セットのうち、前記速度の算出精度が高い方を速度算出用セットとし、当該速度算出用セットに基づく前記速度を、前記受信機の速度として出力する受信機速度出力手段と、を備えることを特徴としている。
【0013】
ここで、受信機の位置の算出精度は衛星との間の擬似距離に依存するのに対し、速度の算出精度は周波数精度に依存するため、位置検出用の衛星群からなる基本セットを用いて速度算出を行うことにより速度の算出精度をある程度確保することはできるものの、基本セットには、速度算出に適していない衛星が含まれる可能性もある。
【0014】
しかしながら、上記構成によれば、少なくとも基本セットを含む複数の衛星で構成され且つ組み合わせの異なる衛星からなる拡張セットのうち、その速度の算出精度が最良となる拡張セットを選択し、すなわち、基本セットの他に、速度の算出精度の向上に寄与する衛星がある場合にはこれを基本セットに加え、これを用いて速度を算出するから、この選択した拡張セットを用いて速度の算出を行うことにより、速度の算出精度をより向上させることができ、より高精度な速度の算出結果を得ることができる。さらに、基本セットを構成する衛星の何れかで構成され且つ組み合わせの異なる排他セットのうち、その速度の算出精度が最良となる排他セットを選択し、すなわち、基本セットの中に、速度の算出精度に悪影響を及ぼす衛星がある場合にはこれを基本セットから除去し、残った衛星を用いて速度を算出するから、速度の算出精度の低下を抑制することができ、より高精度な速度の算出結果を得ることができる。そして、このようにして選択した拡張セット及び排他セットのうち、その速度の算出精度がより良い方を速度算出用セットとし、この速度算出用セットに基づく速度を、受信機の速度とするから、基本セットのうち、速度の算出精度を低下させる衛星を除去すると共に速度の算出精度の向上に寄与する衛星を加え、これらを用いて速度を算出することによって、速度の算出精度をより向上させることができ、すなわち、より高精度な速度の算出結果を得ることができる。
【0015】
また、上記した測位装置において、前記拡張セット生成手段は、前記基本セットを構成する基本衛星を除く非基本衛星についてその信頼度を検出する非基本衛星信頼度検出手段を備え、当該非基本衛星信頼度検出手段で検出した信頼度の並び順に前記信頼度が最良の非基本衛星から所定数の非基本衛星を、前記基本セットに加えて前記拡張セットを生成し、且つ前記基本セットに加える前記非基本衛星の数を、1ずつ増加させることを特徴としている。
【0016】
上記構成によれば、基本セットと信頼度が最良の非基本衛星からなる拡張セット、基本セットと信頼度が最良及びその次の非基本衛星からなる拡張セット、基本セットと信頼度が最良のものから3番目までの非基本衛星からなる拡張セット、というように、基本セットに対し信頼度が最良ものからその数を1ずつ増しながら非基本衛星が加えられて拡張セットが生成される。信頼度が高い衛星は、速度の算出精度の向上に寄与する可能性が高いと予測されることから信頼度が高い衛星から順に、基本セットに加える非基本衛星の数を増していくことによって、速度の算出精度が高いと予測される衛星の組み合わせからなる拡張セットを効率的に且つ的確に生成することができる。
【0017】
また、上記した測位装置において、前記排他セット生成手段は、前記基本セットを構成する基本衛星についてその信頼度を検出する基本衛星信頼度検出手段を備え、当該基本衛星信頼度検出手段で検出した信頼度の並び順に前記信頼度が最低のものから所定数の基本衛星を、前記基本セットから除去して前記排他セットを生成し、且つ前記基本セットから除去する衛星数を、1ずつ増加させることを特徴としている。
【0018】
上記構成によれば、基本セットから信頼度が最低の基本衛星を除去した排他セット、基本セットから信頼度が最低のものから2つの基本衛星を除去した排他セット、基本セットから信頼度が最低のものから3つの基本衛星を除去した排他セット、というように、基本セットから信頼度の低いものからその数を1ずつ増しながら基本衛星が除去されて排他セットが生成される。信頼度が低い衛星は、速度の算出精度の低下の要因となる可能性が高いことから信頼度の低い衛星から順に、基本セットから除去する基本衛星の数を増していくことによって、速度の算出精度が高いと予測される衛星の組み合わせからなる排他セットを効率的に且つ的確に生成することができる。
【0019】
また、上記した測位装置において、前記受信機速度出力手段は、前記速度算出用セットを構成する各衛星からの電波の周波数精度を検出する周波数精度検出手段と、前記速度算出用セットを構成する各衛星に対し、前記周波数精度検出手段で検出した周波数精度に基づき当該周波数精度が高い衛星ほど重みが大きくなるように重み付けを行い且つ重み付けした前記衛星からの電波を用いて前記受信機の速度を算出する重み付き速度算出手段と、を備え、当該重み付き速度算出手段で算出した速度を、前記受信機の速度として出力することを特徴としている。
【0020】
上記構成によれば、速度算出用セットとして選択された衛星について、その周波数精度に応じて、周波数精度が高いほど重みが大きくなるように重み付けを行い、この重み付けを考慮して、各衛星からの電波を用いて受信機の速度を算出するから、より高精度に速度の算出を行うことができる。
【0021】
また、本発明の測位方法は、受信機の位置検出用の4個以上の衛星群を基本セットとし、当該基本セットを少なくとも含む複数の衛星からなる衛星群と前記基本セットを構成する4個以上の衛星からなる衛星群との少なくとも何れか一方のうち、該衛星群を構成する衛星からの電波を用いて算出した前記受信機の速度の算出精度が最良となる衛星の組み合わせを検出し、この検出した組み合わせの衛星群に基づき前記受信機の速度を算出することを特徴としている。
【0022】
上記構成によれば、受信機の位置検出用の4個以上の衛星群を基本セットとし、この基本セットを少なくとも含む複数の衛星からなる衛星群と基本セットに属する衛星の何れかからなる4個以上の衛星群との少なくとも何れか一方のうち、その衛星群を用いて算出した受信機の速度の算出精度が最良となる衛星の組み合わせを検出し、この検出した組み合わせの衛星群に基づき受信機の速度を算出するから、ある程度の速度の算出精度を確保することのできる位置検出用の衛星群からなる基本セットに対し、さらに受信機の速度の算出精度の向上を図ることの可能な衛星を加えるか、又は、基本セットのうちの速度の算出精度の低下をもたらす衛星を除去し、これに基づき速度を算出するようにしたから、受信機の速度の算出精度をより向上させることができ、より高精度な速度の演算結果を得ることができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態を説明する。
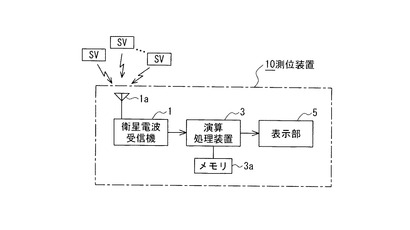
図1は、本発明を適用した測位装置10の一例を示すブロック図である。この測位装置10は、地球の大気圏外を周回するGPS衛星及び準天頂衛星QZSSといった衛星SVから送信された電波を、アンテナ1aを介して受信する衛星電波受信機1と、当該衛星電波受信機1で受信したGPS衛星或いは準天頂衛星QZSSからの衛星電波に基づき測位演算を行い、衛星電波受信機1本体の現在位置及び速度を算出する演算処理装置3とを備え、この演算処理装置3はメモリ3aに格納された演算処理プログラムを実行して衛星電波受信機1本体の現在位置及び速度を算出し、その算出結果を表示部5に出力する。
【0024】
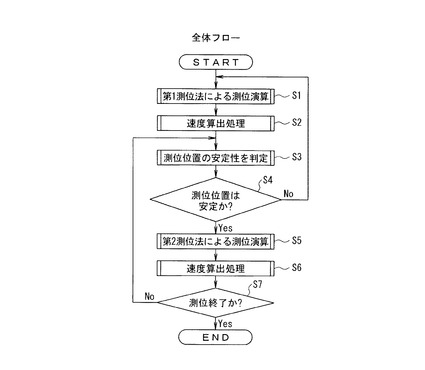
図2は、演算処理装置3で実行される演算処理の処理手順の概略を示すフローチャートである。各処理の詳細は後述する。
演算処理装置3では、まず、第1測位法による測位演算を行って衛星電波受信機1の現在位置を算出し(ステップS1)、次いで第1測位法による測位結果を利用して速度算出処理を行い、衛星電波受信機1の現在の速度を算出する(ステップS2)。
【0025】
次いで、測位演算の結果得た測位位置の安定性を判断し(ステップS3)、測位位置が安定していないと判断した場合には(ステップS4)、ステップS1に戻る。
一方、測位位置が安定していると判断した場合にはステップ4からステップS5に移行して第2測位法による測位演算を行い、次いで第2測位法による測位結果を利用して速度算出処理を行い、衛星電波受信機1の現在の速度を算出する(ステップS6)。
【0026】
次いで、測位終了か否かを判断し(ステップS7)、測位終了ではない場合にはステップS3に戻り、測位終了であると判断した場合には測位を終了する。
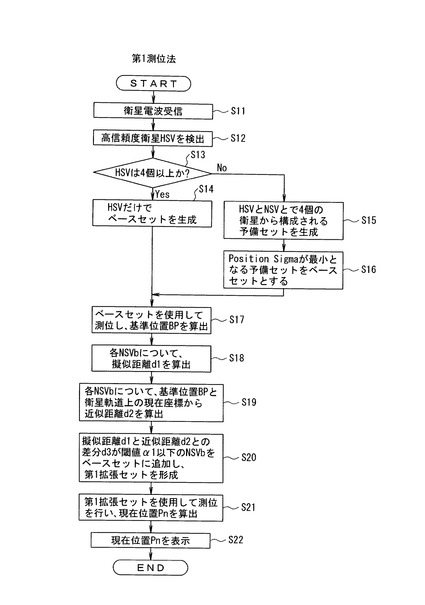
前記ステップS1の第1の測位法による測位演算は、図3に示す手順で処理を行う。まず、前回測位時の測位位置等と、衛星の軌道情報等に基づく衛星現在位置とをもとに、現時点で衛星電波を受信可能なGPS衛星やQZSS衛星(以後、捕捉衛星という。)を特定し、この捕捉衛星からの衛星電波を受信する(ステップS11)。
【0027】
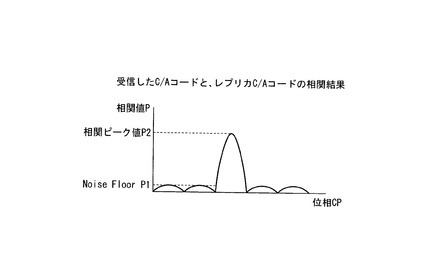
次いで、受信した衛星電波の受信強度に基づいて、受信電波が直接波である信頼度が高いか否かを判断し、直接波である信頼度が高い電波である場合には、この電波の送信元の衛星を高信頼度衛星HSVとして特定する(ステップS12)。
前記衛星電波の受信強度は、受信した衛星電波に含まれるC/Aコードと衛星電波受信機1で発生しているレプリカとの相関処理を行い、例えば、図4に示す、相関結果を得てこの相関結果から、ノイズフロアの部分に対応する相関値P1と、相関ピーク値P2とを読み取り、これらの差分が、予め設定したしきい値よりも大きいとき、且つ、この衛星の仰角が予め設定したしきい値(例えば、50度程度)以上であるときに、この衛星は、高信頼度衛星HSVであると判断する。この処理を全ての捕捉衛星について行う。
【0028】
次いで、ステップS13に移行し、ステップS12で高信頼度衛星HSVが4個以上検出されたかどうかを判定する。そして、高信頼度衛星HSVが4個以上検出された場合にはステップS14に移行し、この4個以上の高信頼度衛星HSVを、ベースセットBSとして設定する。
【0029】
一方、4個以上の高信頼度衛星HSVが検出されない場合にはステップS15に移行し、高信頼度衛星HSVを除く捕捉衛星を通常衛星NSVとすると、高信頼度衛星HSVと前記通常衛星NSVの何れかとの合計4個の衛星で構成される、種類の異なる予備セットを生成する。例えば、高信頼度衛星HSVが3つであるならば、さらに通常衛星NSVを1つ加え、これを予備セットa1とする。同様に、3つの高信頼度衛星HSVに、別の通常衛星NSV′を1つ加え、これを予備セットa2とする。同様の手順で、3つの高信頼度衛星HSVを含み、且つ、組み合わせの異なる4つの衛星からなる、全ての組み合わせを生成する。
【0030】
そして、ステップS16に移行し、各組み合わせについて、測位位置の標準偏差をポジションシグマとして算出する。すなわち、各組み合わせそれぞれについて、測位演算を行い、その測位結果の標準偏差を算出しこれをポジションシグマとする。そして、高信頼度衛星HSV及び通常衛星NSVから構成される予備セットのうち、ポジションシグマが最小となる予備セットをベースセットBSとして設定する。このポジションシグマは測位結果の標準偏差であるから、ポジションシグマが小さいほど、測位結果のばらつきは小さく、測位結果は安定している。このため、ポジションシグマが小さい予備セットを使用した測位結果ほど、測位結果の信頼性が高い。このため、高信頼度衛星HSVが4個未満であっても、信頼性が高い測位結果を算出可能なベースセットBSを得ることができる。
【0031】
そして、ステップS17に移行し、このベースセットBSとして設定された4個以上の衛星からの衛星電波を利用して、衛星電波受信機1の現在位置を算出する。すなわち、ベースセットBSとして設定された衛星それぞれについて、その衛星電波の送信時刻及び受信時刻との差に基づいて擬似距離を算出すると共に、受信した衛星電波に含まれる衛星の位置情報から、現在時刻における各衛星の衛星軌道上の座標を算出し、これらに基づいて衛星電波受信機1の現在位置を推定する。そして、これを基準位置BPとする。
【0032】
次いでステップS18に移行し、ベースセットBSに含まれない通常衛星NSVを非ベース衛星NSVbとし、この非ベース衛星NSVbのそれぞれについて、次式(1)に示すように、その衛星電波の送信時刻及び受信時刻との間の時間Δtに光速cを乗算することにより、衛星電波受信機1とその衛星との間の擬似距離d1を算出する。また、ステップS19では、次式(2)に示すように、ステップS17で算出した基準位置BP(x0,y0,z0)と、非ベース衛星NSVbの衛星軌道上の現在座標(X,Y,Z)との間の距離を算出しこれを近似距離d2とする。
【0033】
d1=c×Δt ……(1)
【0034】
d2=〔(X−x0)2+(Y−y0)2+(Z−z0)2〕1/2 ……(2)
【0035】
そして、ステップS20で、非ベース衛星NSVbのそれぞれについて、擬似距離d1と近似距離d2との差分d3を算出する。そして、この差分d3がしきい値α1(例えば、50〔m〕)以下となる非ベース衛星NSVbをベースセットBSに加算し、これを第1拡張セットSet1とする。
【0036】
次いでステップS21に移行し、ステップS20で生成した第1拡張セットSet1を用い、現在位置Pnを算出する。
ここで、次式(3)は、前記(1)及び(2)式をテイラー展開したものである。
【0037】
d1−d2=h1dx+h2dy+h3dz+cdt ……(3)
【0038】
上記(3)式中、d1及びd2は既知である。(h1,h2,h3)は衛星電波受信機1から各衛星への方向ベクトル(視線ベクトル)であり、周知の方法で算出することができる。したがって、未知数は、dx、dy,dz、dtの4個であるから、4個の衛星について(3)式を生成することによって、解を求めることができる。なお(3)式では、基準位置BPを仮の現在位置(以下、「仮現在位置preP」と呼ぶ)としている。
【0039】
第1回で得られたdx,dy,dzを仮現在位置prePに加えて新たな仮現在位置prePとし、これをもとに再度計算して、解が収斂するまで繰り返し、衛星電波受信機1の現在位置Pn(x,y,z)を計算する。解が収斂したときの仮現在位置prePが衛星電波受信機1の現在位置Pn(x,y,z)である。
次いで、ステップS22に移行し、算出した衛星電波受信機1の測位位置、つまり現在位置Pn(x,y,z)を表示部5に出力する。
次に、前記図2のステップS3での安定性の判断は、図5に示す手順で行う。なお、図2のステップS2及びステップS6の速度算出処理の詳細は後述する。
【0040】
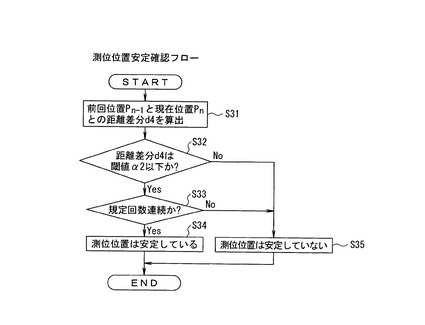
前記安定性の判断は、まず、ステップS1の第1の測位法又は後述のステップS5の第2の測位法で算出した現在位置Pnについて、その前回位置Pn−1との距離差分d4を算出する(ステップS31)。そして、この距離差分d4がしきい値α2(例えば、10〔m〕程度)以下であるかどうかを判断し(ステップS32)、距離差分d4がしきい値α2以下である場合には、この距離差分d4がしきい値α2以下であるという判断が規定回数(例えば5回)連続したかどうかを判断し、規定回数連続した場合にはステップS34に移行し、測位位置Pnは安定していると判断する。一方、ステップS32で距離差分d4がしきい値α2以下ではないと判断した場合、また、ステップS33で距離差分d4がしきい値α2以下の状態が規定回数連続していないと判断した場合にはステップS35に移行し、測位位置Pnは安定していないと判断する。
【0041】
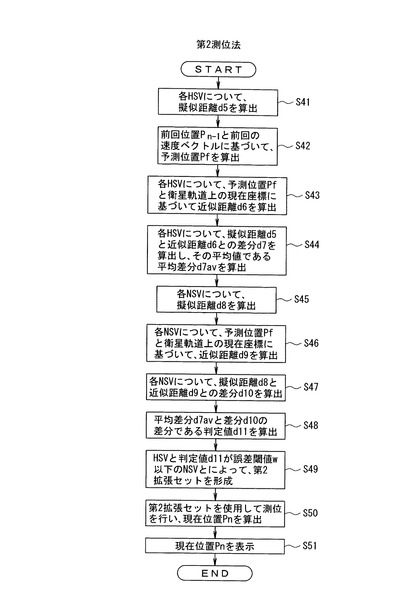
次に、前記図2のステップS5での第2測位法による測位演算は、図6に示す手順で行う。まず、前記図3のステップS12で検出した高信頼度衛星HSVについて、擬似距離d5を算出する(ステップS41)。次いでステップS42に移行し、前回測位時の前回位置Pn−1と前回の速度ベクトルとに基づいて予測位置Pfを算出する。
すなわち、前回の測位位置Pn−1(xt-1,yt-1,zt-1)と、前回の衛星電波受信機1の速度ベクトル(vxt-1,vyt-1,vzt-1)及び前回測位位置算出時点から現在までの経過時間dtとに基づいて次式(4)から現在の予測位置Pf(xt,yt,zt)を算出する。
【0042】
xt=xt-1+vxt-1・dt
yt=yt-1+vyt-1・dt
zt=zt-1+vzt-1・dt ……(4)
【0043】
次いで、ステップS43に移行し、高信頼度衛星HSVのそれぞれについて、ステップS42で算出した予測位置Pfと、衛星軌道上の現在座標とに基づいて近似距離d6を算出する。
次いで、ステップS44に移行し、各高信頼度衛星HSVのそれぞれについて、ステップS41で算出した擬似距離d5と、ステップS43で算出した近似距離d6との差分d7を算出し、各高信頼度衛星HSVの差分d7の平均値である平均差分d7avを算出する。
【0044】
次いでステップS45に移行し、捕捉衛星のうちの通常衛星NSVのそれぞれについて擬似距離d8を算出した後、ステップS46に移行し、各通常衛星NSVのそれぞれについて、予測位置Pfと衛星軌道上の現在座標に基づいて近似距離d9を算出する。
次いでステップS47に移行し、各通常衛星NSVのそれぞれについて、ステップS45で算出した擬似距離d8と、ステップS46で算出した近似距離d9との差分d10を算出する。
【0045】
次いでステップS48に移行し、ステップS44で算出した平均差分d7avと、ステップS47で算出した差分d10との差を判定値d11として算出し、この判定値d11が予め設定した誤差しきい値w(例えば50〔m〕程度)以下となる通常衛星NSVを選択し、この選択した通常衛星と、高信頼度衛星HSVとを第2拡張セットSet2として設定する(ステップS49)。
【0046】
そして、このステップS49で特定した第2拡張セットSet2に含まれる高信頼度衛星HSV及び通常衛星NSVを用いて測位演算を行い、現在位置Pnを算出する。この現在位置Pnの算出方法は、前記図3のステップS21で説明した第1測位法による現在位置Pnの算出方法と同様であるが、第1測位法では、基準位置BPの測位を経てから測位位置Pnを測位する必要があり、測位位置Pnを算出する前にn回(n:予備セット数)測位演算を行う必要があるのに対して、第2測位方法においては、測位演算は測位位置Pnを算出するときの一度で足りる。
【0047】
そして、算出した測位位置、つまり現在位置Pnを表示部5に出力する(ステップS51)。
次に、図2のステップS2及びステップS6での速度算出処理について説明する。これらは同一の処理を行う。
【0048】
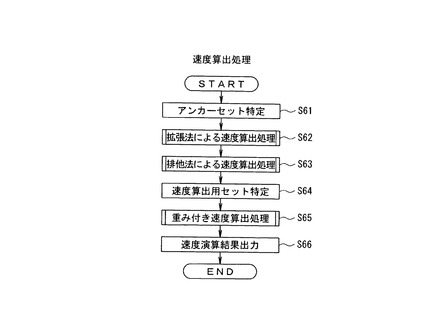
図7は、速度算出処理の概略を示すフローチャートである。まず、図2のステップS1での第1測位法による測位演算処理又はステップS5での第2測位法による測位演算処理において、測位位置の算出に用いた第1拡張セット又は第2拡張セットを構成する衛星を、アンカーセットASとして設定する(ステップS61)。
次いで、ステップS62に移行し、このアンカーセットASを含む複数の衛星に基づいて速度ベクトルを算出する、拡張法による速度算出処理を行う。
【0049】
次いで、ステップS63に移行し、アンカーセットASを構成する衛星の何れかに基づいて速度ベクトルを算出する、排他法による速度算出処理を行う。
次いで、ステップS64に移行し、ステップS62での拡張法による速度算出処理の結果得た最適速度ベクトルと、ステップS63での排他法による速度算出処理の結果得た最適速度ベクトルとのうち、精度がよい方を選択し、この速度ベクトルの算出に用いた衛星の組み合わせを、速度算出用セットとして特定する。
【0050】
そして、ステップS64で特定した速度算出用セットを構成する衛星のそれぞれについてその周波数精度に基づき周波数成分に対して重み付けを行い、重み付けを行った後の周波数成分を用いて再度速度ベクトルの算出を行う(ステップS65)。
そして、この結果得た速度ベクトルを衛星電波受信機1の速度ベクトルとし、これを表示部5に出力する(ステップS66)。
【0051】
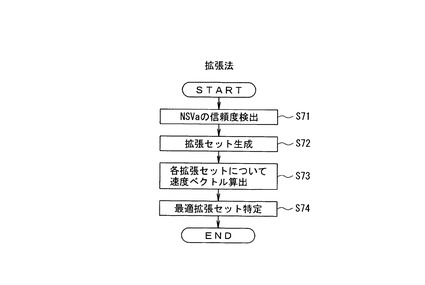
前記図7のステップS62での拡張法による速度算出処理は、図8に示す手順で行う。まず、図7のステップS61で特定したアンカーセットASに含まれない衛星、すなわち、通常衛星からなる非アンカー衛星NSVaのそれぞれについて、その信頼度を検出し、信頼度の高いものから順に、順番を決定する。この順番は、例えば、前記位置算出処理において高信頼度衛星HSVかどうかを判断する際に算出した受信パワーや仰角に基づいて決定する(ステップS71)。
【0052】
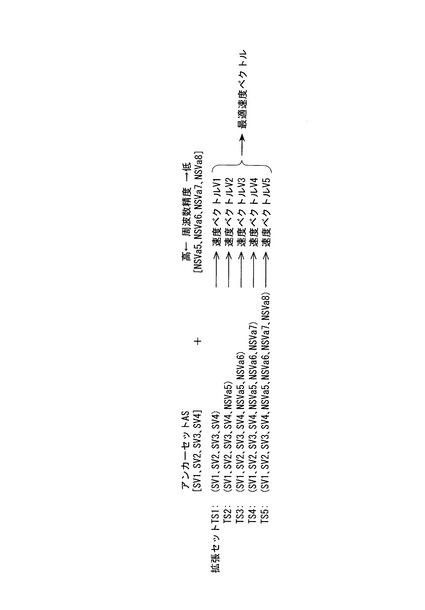
次いで、ステップS72に移行し、アンカーセットASと非アンカー衛星NSVaとからなる拡張セットTSを生成する。具体的には、図9に示すように、アンカーセットASと、非アンカー衛星NSVaのうち信頼度が最も高い衛星とを拡張セットTS1として設定する。次に、拡張セットTS1と、非アンカー衛星NSVaのうち信頼度が2番目に高い衛星とを拡張セットTS2として設定する。同様に拡張セットTS2と、非アンカー衛星NSVaのうち、信頼度が3番目に高い衛星とを拡張セットTS3とし、以後、同様に、一つ前の拡張セットTSm−1と、信頼度がm番目に高い非アンカー衛星NSVaとを拡張セットTSmとして設定する。つまり、アンカーセットASと、非アンカー衛星NSVaとで拡張セットを生成し、且つ、非アンカー衛星NSVaのうち、信頼度が高いものから順に1つずつ非アンカー衛星NSVaを増加させて拡張セットTSを生成する。なお、図9は、衛星電波受信機1の受信チャネルが8チャネルの場合を表している。例えば、受信チャネルが12チャネルの場合には、捕捉衛星は最大12個となる。
【0053】
次いで、ステップS73に移行し、拡張セットTSのそれぞれについて、速度ベクトルを算出する。
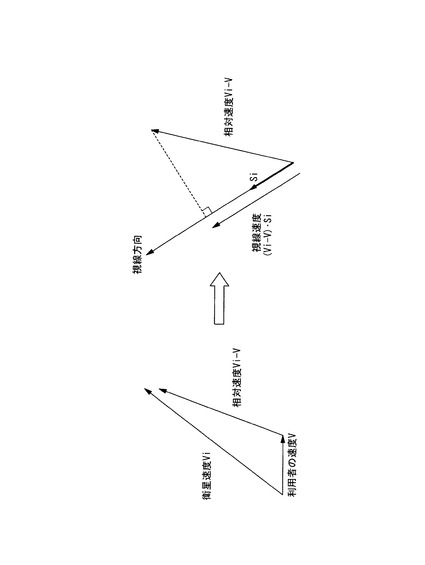
図10は、速度ベクトルの演算方法を示す図である。
図10において、衛星電波受信機1が衛星に対して相対速度を持つ場合、ドップラ効果による周波数偏移Δf〔Hz〕は、次式(5)で表すことができる。
【0054】
Δf=fρ/c ……(5)
ただし、f:搬送波周波数
ρ:衛星電波受信機1と衛星との相対速度
c:光速
である。
【0055】
そして、Siを衛星SViへの視線の単位ベクトル、Viを衛星SViの速度ベクトル、Vを衛星電波受信機1の速度ベクトル、ρiを真の視線速度とすると、以下の(6)式の関係が成り立つ。
【0056】
(Vi−V)Si=ρi ……(6)
【0057】
ここで、ドップラ周波数(f±Δf)を測定するために、衛星電波受信機1には基準発振器が設けられている。基準発振器の周波数に誤差があると、測定したドップラ周波数(f±Δf)は(f±Δf+δf)になってしまい、相対速度ρiobs=c(±Δf+δf)/f=ρi+Δρとなってしまう。なお、Δρは、周波数測定誤差による視線速度の測定誤差である。したがって、ドップラ測定における基準発振器の周波数誤差は全ての衛星の視線速度の測定値に同一の誤差がのるため、前記(6)式は、次式(7)のようになる。なお、式(7)中のρiobsは(8)式で表される。
【0058】
(Vi−V)Si+Δρ=ρiobs ……(7)
【0059】
ρiobs=c(±Δf+δf)/f ……(8)
【0060】
(7)式において、各衛星の速度ベクトルViは、各衛星の軌道情報から算出することができる。また、衛星それぞれへの視線の単位ベクトルSiは、衛星の位置から求めることができる。このため、(7)式の未知数は、衛星電波受信機1の速度ベクトルVと視線速度の測定誤差Δρの4つである。この結果、4つの衛星の同時観測により衛星電波受信機1の速度ベクトルVを求めることができる。このとき、衛星電波受信機1の基準発振器の周波数誤差も得られ、衛星の原子周波数標準と同等の精度の周波数を取得できる。
【0061】
以上の手順により、各拡張セットTSのそれぞれについて、速度ベクトルを算出したならば、ステップS73からステップS74に移行し、各拡張セットTSの速度ベクトルのうち、その算出精度の最もよいものを選択し、これを最適速度ベクトルとする。前記速度ベクトルの精度が最もよいものの判定は、例えば、拡張セットTS毎に算出される、周波数精度の分散とPDOP(Position Dilution Of Precision)との積で算出される速度の精度に基づいて行う。前記PDOPは、衛星の配置が測位計算に与える影響を数値化した指標であって、衛星の空間配置が測位精度にどの程度の影響を与えるかの目安として定義され、PDOP値が小さいときほど測位精度が高い。
【0062】
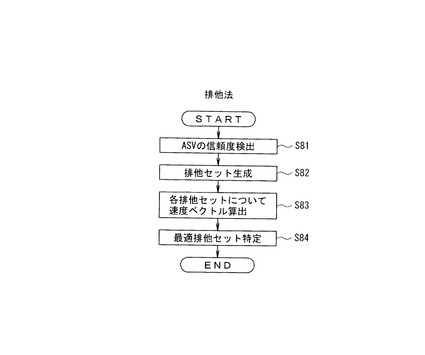
次に、図7のステップS63での排他法による速度算出処理は、図11に示す手順で行う。
まず、図7のステップS61で設定したアンカーセットASを構成するアンカー衛星ASVのそれぞれについてその信頼度を検出し、信頼度の高いものから順に、順番を決定する。例えば、前記位置算出処理において高信頼度衛星HSVかどうかを判断する際に算出した受信パワーや仰角に基づいてその順位を決定する(ステップS81)。
次いで、ステップS82に移行し、アンカーセットASを構成する何れかのアンカー衛星ASVで構成される排他セットRSを生成する。
【0063】
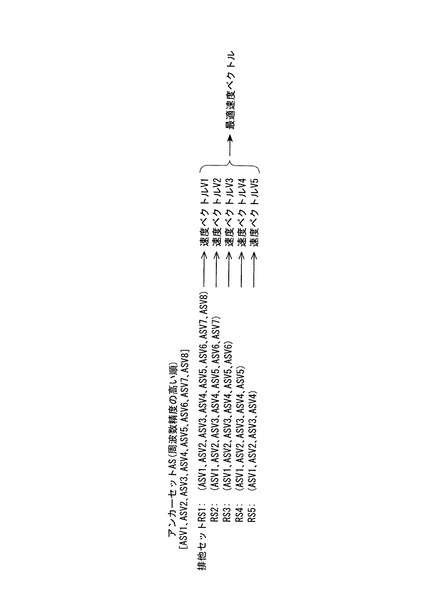
具体的には、図12に示すように、まず、アンカーセットASを排他セットRS1として設定する。次に、排他セットRS1つまりアンカーセットASのうち、信頼度が最も低いアンカー衛星ASV(ASV8)を除去したものを排他セットRS2として設定する。次に、排他セットRS2のうち、信頼度が最も低いアンカー衛星ASV(ASV7)を除去しこれを排他セットRS3とする。同様に排他セットRS3のうち、信頼度が最も低いアンカー衛星ASV(ASV6)を除去しこれを排他セットRS4とし、以後、同様に、一つ前の排他セットRSk−1の中から、信頼度が最も低いアンカー衛星ASVを除去しこれを排他セットRSkとし、排他セットRSを構成するアンカー衛星ASVの数が4個となるまで一つずつ除去する。つまり、アンカーセットASを構成するアンカー衛星ASVの何れかで排他セットRSを生成し、且つ信頼度の低いものから順に1つずつアンカー衛星ASVを除去して排他セットRSを生成する。なお、図12は、衛星電波受信機1の受信チャネルが8チャネルの場合を表している。例えば受信チャネルが12チャネルの場合にはアンカーセットASとして最大12個を設定することが可能となる。
【0064】
次いで、ステップS83に移行し、以後、上述の拡張法での処理と同様の手順で、排他セットRSのそれぞれについて速度ベクトルを算出し、次いでステップS84に移行して、算出した排他セットRSの速度ベクトルのうち、その精度が最も高いものを選択し、これを最適速度ベクトルとする。
次に、図7のステップS65での重み付き速度算出処理は、図13に示す手順で行う。
【0065】
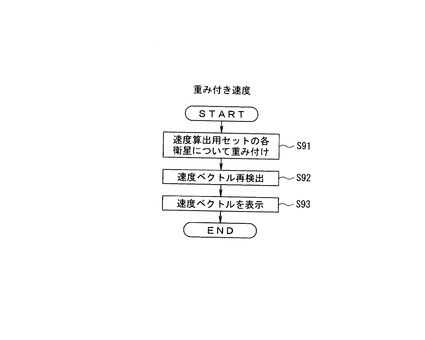
まず、図7のステップS64で特定した速度算出用セットを構成する衛星のそれぞれについて前記(7)式に対する重み付けを行う(ステップS91)。例えば、前記ステップS74で速度の算出精度が最良となる拡張セット、又は、ステップS84で速度の算出精度が最良となる排他セットを特定する際に用いた周波数精度をもとに設定し、周波数精度が高いときほど大きな重みとなるように設定する。
【0066】
次いで、ステップS92に移行し、ステップS91で設定した重みを、前記(7)式に乗算し、再度速度演算を行う。
そして、この速度演算結果を、衛星電波受信機1の速度ベクトルとして表示部5に出力する。
【0067】
ここで、上述のように、衛星電波受信機1の現在位置を算出する際、測位位置が安定していない場合には、第1測位法により演算を行い、衛星電波の受信パワーや仰角等の点からマルチパスの影響を受けにくいと予測される高信頼度衛星HSVを利用して、ポジションシグマが最小となる衛星セットをベースセットBSとして基準位置BPを算出し、この基準位置BPをもとにマルチパスの影響を受けていない通常衛星NSVを選択し、この選択した通常衛星NSVとベースセットBSとを第1拡張セットし、これを用いて現在位置を算出している。したがって、仰角の高い高信頼度衛星HSVだけでなく、マルチパスによる精度劣化が少ない衛星を含み、その衛星配置の点でも良好な第1拡張セットを利用して、位置測定を行うことによって、高精度の測位位置を得ることができる。
【0068】
そして、測位位置が安定している場合には、測位位置が安定している状態で、より高精度に測位演算を行うことのできる第2測位法を用いて演算を行っているから、衛星電波受信機1の移動速度の変化等、測位位置の安定性の変化に関わらず高精度に測位を行うことができる。
また、衛星電波受信機1の現在速度を算出する際、測位演算で用いた第1拡張セット又は第2拡張セットを用いて速度演算を行うのではなく、測位演算で用いた衛星をアンカーセットASとし、このアンカーセットASをもとに生成した、周波数精度の高い衛星からなる拡張セットTS又は排他セットRSを用いて速度演算を行っている。
【0069】
ここで、高精度な位置測定を行うことの可能な第1拡張セット或いは第2拡張セットは、必ずしも、高精度な速度測定を行うことが可能な衛星であるとは限らない。つまり、位置測定を行う場合には擬似距離精度の高い衛星が必要であるが、速度算出には、周波数精度の高い衛星が必要である。したがって、位置計測に用いた第1拡張セット或いは第2拡張セットを用いたとしても必ずしも高精度な速度算出結果を得ることはできない可能性がある。
【0070】
しかしながら上述のように、アンカーセットASに対して非アンカー衛星NSVaのうちその周波数精度のよい衛星を加えた最良の拡張セットを特定し、さらに、アンカーセットASのうち周波数精度のよい衛星で構成される最良の排他セットを特定し、これらのうち、その速度精度が最もよいものを、速度算出に用いる速度算出用セットとして選択し、つまり、衛星の組み合わせを替えながら最良な速度精度を得ることのできる組み合わせを選択するから、周波数精度の高い衛星からなる速度算出用セットとして得ることができる。
【0071】
このとき、捕捉衛星全てがアンカーセットASに含まれる場合、拡張法では、他の衛星を含む拡張セットを生成することができないため、アンカーセットASに基づく速度が最適速度ベクトルとなってしまい、アンカーセットASよりも、周波数精度の良い衛星を選択することは困難である。逆に、排他法では、アンカーセットASに4個しか衛星が含まれない場合、組み合わせの異なる排他セットを生成することができないため、アンカーセットASに基づく速度が最適速度ベクトルとなってしまい、アンカーセットASよりも周波数精度の良い衛星を選択することができない。
【0072】
しかしながら、上述のように、拡張法及び排他法の二通りの方法で、最適拡張セットと最適排他セットとを特定しこれらのうちの速度精度がより良い方を速度算出用セットとして選択するから、アンカーセットASに含まれる衛星の数や、非アンカー衛星NSVaの数等に関わらず、的確な速度算出用セットを得ることができる。
そして、このようにして選択した速度算出用セットの各衛星に対し、その周波数精度に応じて重み付けを行い、これに基づき速度演算を行うから、周波数精度を考慮し、より高精度に速度演算を行うことができる。
【0073】
また、この衛星電波受信機1は、GPS衛星及び準天頂衛星からの電波を受信可能に構成され、準天頂衛星は、少なくとも一つは日本の上空に存在するように配置された衛星であるから、少なくとも1つは高信頼度衛星HSVを確保することができ、その分、位置や速度の算出精度を確保することができる。
また、上記実施の形態においては、位置演算に用いた衛星群をアンカーセットASとし、このアンカーセットASを基準にして速度算出用の衛星群を設定している。ここで、位置の算出精度の高い衛星群は、速度の算出精度も比較的高いとみなすことができるから、位置演算に用いた衛星群をアンカーセットASとして設定することによって、速度の算出精度がより高い衛星群を効果的に検出することができ、すなわち、速度の算出精度を向上させることができる。
【0074】
また、拡張セットTSを生成する際に、アンカーセットASに対し、非アンカー衛星NSVaのうち信頼度の高いものから順に、加える数を増して拡張セットTSを生成しているから、アンカーセットASに対し、速度の算出精度の向上が期待できる衛星の組み合わせからなる拡張セットTSを効果的に生成することができる。
同様に、排他セットRSを生成する際に、アンカーセットASに対して、アンカー衛星ASVのうち信頼度の低いものから順に、排除する数を増して排他セットRSを生成しているから、速度の算出精度の低下に影響を及ぼす可能性のある衛星を効果的に除去することができ、的確な排他セットRSを生成することができる。
【0075】
なお、上記実施の形態においては、拡張法及び排他法の二通りの方法を用いて速度算出用セットを得る場合について説明したが、これに限るものではなく、例えば、拡張法或いは排他法の何れか一方のみに基づいて速度算出用セットを設定することも可能である。この場合、上述のように、アンカーセットASに含まれる衛星の数や、非アンカー衛星NSVaの数等によっては、的確な速度算出用セットを得ることができない可能性があるが、この場合には、例えば、アンカーセットASに含まれる衛星の数や、非アンカー衛星NSVaの数等によって、拡張法と排他法とを切り換えて速度算出用セットを得るようにする等、運用によって対応すればよい。そしてこのように、拡張及び排他法の何れかにより検出した速度算出用セットに対し、重み付けをすることにより、その算出精度をより向上させることができる。
【0076】
また、上記実施の形態においては、第1測位法及び第2測位法を用いて位置検出を行う場合について説明したがこれに限るものではなく、他の手順で現在位置を算出することも可能であり、要は、4個以上の衛星からの衛星電波を用いて衛星電波受信機1の現在位置を計測する位置計測手段であれば適用することができる。この場合には、位置計測手段での位置計測に用いた4個以上の衛星をアンカーセットASとして速度演算を行えばよい。また、位置の検出精度の高い衛星群は、速度の検出精度も高いと予測されることから、位置の検出精度の高い衛星群を、アンカーセットASとして設定することによって、より高精度に速度検出を行うことができる。
【0077】
また、このようにして算出した速度情報を利用したフィルタリング処理を行い、これによって測位精度の向上を図るようにしてもよい。
また、上記実施の形態においては、拡張セットTSを生成する際に、アンカーセットASに対し、非アンカー衛星を1ずつ増しながら加えて拡張セットを生成し、且つ、信頼度の高いものから順に加える場合について説明したがこれに限るものではなく、衛星の組み合わせの異なる拡張セットであればどのような組み合わせであってもよい。同様に、排他セットRSも、どのような手順でアンカーセットASを除去するようにしてもよく、衛星の組み合わせの異なる排他セットであればどのような組み合わせでもよい。
【0078】
ここで、上記実施の形態において、衛星電波受信機1が受信機に対応し、図7のステップS61の処理が基本セット設定手段に対応し、図8のステップS71、S72の処理が拡張セット生成手段に対応し、図8のステップS73、S74の処理が拡張セット選択手段に対応し、図7のステップS66の処理が受信機速度出力手段に対応している。
また、図11のステップS81及びS82の処理が排他セット生成手段に対応し、ステップS83、S84の処理が排他セット選択手段に対応している。
【0079】
また、図8のステップS71の処理が非基本衛星信頼度検出手段に対応し、図11のステップS81の処理が基本衛星信頼度検出手段に対応している。
また、ステップS74及びステップS84で、最適拡張セット又は最適排他セットを特定する際に用いた周波数精度を利用する処理が周波数精度検出手段に対応し、図7のステップS65の処理が重み付き速度算出手段に対応している。
【図面の簡単な説明】
【0080】
【図1】本発明の測位装置の一例を示すブロック図である。
【図2】図1の演算処理装置で実行される演算処理の処理手順の一例を示すフローチャートである。
【図3】図2のステップS1の第1測位法による測位演算の処理手順の一例を示すフローチャートである。
【図4】高信頼度衛星かどうかを判断するためのC/Aコードの相関結果の一例である。
【図5】図2のステップS3の測位位置が安定しているかどうかの判断手順の一例を示すフローチャートである。
【図6】図2のステップS5の第2測位法による測位演算の処理手順の一例を示すフローチャートである。
【図7】図2のステップS2及びステップS6の速度算出処理の処理手順の一例を示すフローチャートである。
【図8】図7のステップS62の拡張法による速度算出処理の処理手順の一例を示すフローチャートである。
【図9】拡張法による速度の算出方法を説明するための説明図である。
【図10】速度の算出方法を説明するための説明図である。
【図11】図7のステップS63の排他法による速度算出処理の処理手順の一例を示すフローチャートである。
【図12】排他法による速度の算出方法を説明するための説明図である。
【図13】図7のステップS65の重み付き速度算出処理の処理手順の一例を示すフローチャートである。
【符号の説明】
【0081】
1 衛星電波受信機、3 演算処理装置、5 表示部
【技術分野】
【0001】
本発明は、測位装置及び測位方法に関し、特に、GPS(グローバルポジショニングシステム)に適用して好適なものである。
【背景技術】
【0002】
GPS衛星を利用した測位技術は、自動車のナビゲーションシステムを始め、社会のあらゆる分野に利用されている。
しかしながら、特に、都心部や、高架下等、遮蔽物の多い場所においては、GPS受信機を移動させるとその移動に伴って、GPS受信機で捕捉できる衛星数と衛星の配置とが変化する。このため、GPS受信機での位置計算結果の連続性が失われることから、位置推定精度が劣化することがある。したがって、GPS衛星を利用する測位方法では、測位装置のばらつきを低減させるために、GPS受信機の移動速度を用いて測位結果のフィルタリング処理を行う、位置/速度の平滑化がよく知られている。
【0003】
例えば、特許文献1には、時間遅れを生じることなく、測位位置のばらつきに対してより正しい現在位置を検出するために、車両の測位位置及び速度ベクトルを検出し、速度ベクトル及び現在位置により、次回の処理タイミングでの車両の位置を推定し、この推定位置と次回の処理タイミングでの車両の測位位置との平均化処理に基づいて現在位置を更新する方法が開示されている。
【0004】
また、特許文献2には、移動速さについても移動方位についても、良好な演算結果を得ることができるようにするために、GPS衛星からの電波を受信してGPS受信装置の現在位置を原点とする移動速度を求め、求めた移動速度と1サンプリング期間前の移動速度との差に重み定数を乗算した値に基づいて移動速度の雑音成分を低減し、この雑音成分が低減された移動速度に基づいてGPS受信装置の移動方位を演算する方法が開示されている。
【0005】
また、位置推定速度の向上を図るため、測位演算に用いる衛星の組み合わせの中から、最も精度よく位置測定を行うことの可能な衛星の組み合わせを選択し、この衛星の組み合わせを用いて測位演算を行うもの等も提案されている(特許文献3)。
【特許文献1】特開平8−68651号公報
【特許文献2】特開平8−62320号公報
【特許文献3】特開平6−265626号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
一般に、GPS受信装置の速度算出を行う場合、位置計測に用いた衛星の受信電波に基づいて速度算出を行うようにしているが、位置推定に適したGPS衛星は、擬似距離の算出精度がよい衛星であるのに対し、速度推定に適したGPS衛星は、周波数の検出精度がよい衛星であるため、位置推定に適したGPS衛星が、必ずしも、速度推定に適したGPS衛星であるとは限らない。このため、位置計測に適したGPS衛星を選択し、これに基づいて位置推定を行うと共に速度推定を行った場合、位置精度の向上を図ることはできるものの、必ずしも速度精度の向上を図ることはできない可能性がある。したがって、上述のように、位置及び速度の平滑化を行ったとしても、位置精度の向上を十分図ることができない可能性がある。
【0007】
そこで、この発明は、上記従来の未解決の問題に着目してなされたものであり、速度の検出精度の向上を図ることの可能な測位装置及び測位方法を提供することを目的としている。
【課題を解決するための手段】
【0008】
上記した課題を解決するために、本発明の測位装置は、衛星からの電波を受信する受信機と、少なくとも4個以上の衛星を含む前記受信機の位置検出用の衛星群を、基本セットとして設定する基本セット設定手段と、当該基本セット設定手段で設定した基本セットを少なくとも含む複数の衛星で構成され且つその組み合わせの異なる1以上の拡張セットを生成する拡張セット生成手段と、当該拡張セット生成手段で生成した拡張セットそれぞれについて該拡張セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる拡張セットを選択する拡張セット選択手段と、当該拡張セット選択手段で選択した拡張セットを速度算出用セットとし、当該速度算出用セットに基づく前記速度を、前記受信機の速度として出力する受信機速度出力手段と、を備えることを特徴としている。
【0009】
ここで、受信機の位置の算出精度は衛星との間の擬似距離に依存するのに対し、速度の算出精度は周波数精度に依存するため、位置検出用の衛星群からなる基本セットを用いて速度算出を行うことで速度の算出精度をある程度確保することはできるものの、基本セットには、速度算出に適していない衛星が含まれる可能性もある。
しかしながら、上記構成によれば、少なくとも基本セットを含む複数の衛星で構成され且つ組み合わせの異なる衛星からなる拡張セットのうち、その速度の算出精度が最良となる拡張セットを速度算出用セットとして選択し、すなわち、基本セットの他に、速度の算出精度の向上に寄与する衛星がある場合にはこれを基本セットに加え、これを用いて速度を算出するから、速度の算出精度をより向上させることができ、より高精度な速度の算出結果を得ることができる。
【0010】
また、本発明の測位装置は、衛星からの電波を受信する受信機と、少なくとも4個以上の衛星を含む前記受信機の位置検出用の衛星群を、基本セットとして設定する基本セット設定手段と、当該基本セット設定手段で設定した基本セットに含まれる4個以上の衛星で構成され且つその組み合わせの異なる1以上の排他セットを生成する排他セット生成手段と、当該排他セット生成手段で生成した排他セットそれぞれについて該排他セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる排他セットを選択する排他セット選択手段と、当該排他セット選択手段で選択した排他セットを速度算出用セットとし、当該速度算出用セットに基づく前記速度を、前記受信機の速度として出力する受信機速度出力手段と、を備えることを特徴としている。
【0011】
ここで、受信機の位置の算出精度は衛星との間の擬似距離に依存するのに対し、速度の算出精度は周波数精度に依存するため、位置検出用の衛星群からなる基本セットを用いて速度算出を行うことにより速度の算出精度をある程度確保することはできるものの、基本セットには、速度算出に適していない衛星が含まれる可能性もある。
しかしながら、上記構成によれば、基本セットを構成する衛星の何れかで構成され且つ組み合わせの異なる排他セットのうち、その速度の算出精度が最良となる排他セットを速度算出用セットとして選択し、すなわち、基本セットの中に、速度の算出精度に悪影響を及ぼす衛星がある場合にはこれを基本セットから除去し、残った衛星を用いて速度を算出するから、速度の算出精度の低下を抑制することができ、より高精度な速度の算出結果を得ることができる。
【0012】
また、本発明の測位装置は、衛星からの電波を受信する受信機と、少なくとも4個以上の衛星を含む前記受信機の位置検出用の衛星群を、基本セットとして設定する基本セット設定手段と、当該基本セット設定手段で設定した基本セットを少なくとも含む複数の衛星で構成され且つその組み合わせの異なる1以上の拡張セットを生成する拡張セット生成手段と、当該拡張セット生成手段で生成した拡張セットそれぞれについて該拡張セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる拡張セットを選択する拡張セット選択手段と、前記基本セット設定手段で設定した基本セットに含まれる4個以上の衛星で構成され且つその組み合わせの異なる1以上の排他セットを生成する排他セット生成手段と、当該排他セット生成手段で生成した排他セットそれぞれについて該排他セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる排他セットを選択する排他セット選択手段と、前記拡張セット選択手段で選択した拡張セット及び前記排他セット選択手段で選択した排他セットのうち、前記速度の算出精度が高い方を速度算出用セットとし、当該速度算出用セットに基づく前記速度を、前記受信機の速度として出力する受信機速度出力手段と、を備えることを特徴としている。
【0013】
ここで、受信機の位置の算出精度は衛星との間の擬似距離に依存するのに対し、速度の算出精度は周波数精度に依存するため、位置検出用の衛星群からなる基本セットを用いて速度算出を行うことにより速度の算出精度をある程度確保することはできるものの、基本セットには、速度算出に適していない衛星が含まれる可能性もある。
【0014】
しかしながら、上記構成によれば、少なくとも基本セットを含む複数の衛星で構成され且つ組み合わせの異なる衛星からなる拡張セットのうち、その速度の算出精度が最良となる拡張セットを選択し、すなわち、基本セットの他に、速度の算出精度の向上に寄与する衛星がある場合にはこれを基本セットに加え、これを用いて速度を算出するから、この選択した拡張セットを用いて速度の算出を行うことにより、速度の算出精度をより向上させることができ、より高精度な速度の算出結果を得ることができる。さらに、基本セットを構成する衛星の何れかで構成され且つ組み合わせの異なる排他セットのうち、その速度の算出精度が最良となる排他セットを選択し、すなわち、基本セットの中に、速度の算出精度に悪影響を及ぼす衛星がある場合にはこれを基本セットから除去し、残った衛星を用いて速度を算出するから、速度の算出精度の低下を抑制することができ、より高精度な速度の算出結果を得ることができる。そして、このようにして選択した拡張セット及び排他セットのうち、その速度の算出精度がより良い方を速度算出用セットとし、この速度算出用セットに基づく速度を、受信機の速度とするから、基本セットのうち、速度の算出精度を低下させる衛星を除去すると共に速度の算出精度の向上に寄与する衛星を加え、これらを用いて速度を算出することによって、速度の算出精度をより向上させることができ、すなわち、より高精度な速度の算出結果を得ることができる。
【0015】
また、上記した測位装置において、前記拡張セット生成手段は、前記基本セットを構成する基本衛星を除く非基本衛星についてその信頼度を検出する非基本衛星信頼度検出手段を備え、当該非基本衛星信頼度検出手段で検出した信頼度の並び順に前記信頼度が最良の非基本衛星から所定数の非基本衛星を、前記基本セットに加えて前記拡張セットを生成し、且つ前記基本セットに加える前記非基本衛星の数を、1ずつ増加させることを特徴としている。
【0016】
上記構成によれば、基本セットと信頼度が最良の非基本衛星からなる拡張セット、基本セットと信頼度が最良及びその次の非基本衛星からなる拡張セット、基本セットと信頼度が最良のものから3番目までの非基本衛星からなる拡張セット、というように、基本セットに対し信頼度が最良ものからその数を1ずつ増しながら非基本衛星が加えられて拡張セットが生成される。信頼度が高い衛星は、速度の算出精度の向上に寄与する可能性が高いと予測されることから信頼度が高い衛星から順に、基本セットに加える非基本衛星の数を増していくことによって、速度の算出精度が高いと予測される衛星の組み合わせからなる拡張セットを効率的に且つ的確に生成することができる。
【0017】
また、上記した測位装置において、前記排他セット生成手段は、前記基本セットを構成する基本衛星についてその信頼度を検出する基本衛星信頼度検出手段を備え、当該基本衛星信頼度検出手段で検出した信頼度の並び順に前記信頼度が最低のものから所定数の基本衛星を、前記基本セットから除去して前記排他セットを生成し、且つ前記基本セットから除去する衛星数を、1ずつ増加させることを特徴としている。
【0018】
上記構成によれば、基本セットから信頼度が最低の基本衛星を除去した排他セット、基本セットから信頼度が最低のものから2つの基本衛星を除去した排他セット、基本セットから信頼度が最低のものから3つの基本衛星を除去した排他セット、というように、基本セットから信頼度の低いものからその数を1ずつ増しながら基本衛星が除去されて排他セットが生成される。信頼度が低い衛星は、速度の算出精度の低下の要因となる可能性が高いことから信頼度の低い衛星から順に、基本セットから除去する基本衛星の数を増していくことによって、速度の算出精度が高いと予測される衛星の組み合わせからなる排他セットを効率的に且つ的確に生成することができる。
【0019】
また、上記した測位装置において、前記受信機速度出力手段は、前記速度算出用セットを構成する各衛星からの電波の周波数精度を検出する周波数精度検出手段と、前記速度算出用セットを構成する各衛星に対し、前記周波数精度検出手段で検出した周波数精度に基づき当該周波数精度が高い衛星ほど重みが大きくなるように重み付けを行い且つ重み付けした前記衛星からの電波を用いて前記受信機の速度を算出する重み付き速度算出手段と、を備え、当該重み付き速度算出手段で算出した速度を、前記受信機の速度として出力することを特徴としている。
【0020】
上記構成によれば、速度算出用セットとして選択された衛星について、その周波数精度に応じて、周波数精度が高いほど重みが大きくなるように重み付けを行い、この重み付けを考慮して、各衛星からの電波を用いて受信機の速度を算出するから、より高精度に速度の算出を行うことができる。
【0021】
また、本発明の測位方法は、受信機の位置検出用の4個以上の衛星群を基本セットとし、当該基本セットを少なくとも含む複数の衛星からなる衛星群と前記基本セットを構成する4個以上の衛星からなる衛星群との少なくとも何れか一方のうち、該衛星群を構成する衛星からの電波を用いて算出した前記受信機の速度の算出精度が最良となる衛星の組み合わせを検出し、この検出した組み合わせの衛星群に基づき前記受信機の速度を算出することを特徴としている。
【0022】
上記構成によれば、受信機の位置検出用の4個以上の衛星群を基本セットとし、この基本セットを少なくとも含む複数の衛星からなる衛星群と基本セットに属する衛星の何れかからなる4個以上の衛星群との少なくとも何れか一方のうち、その衛星群を用いて算出した受信機の速度の算出精度が最良となる衛星の組み合わせを検出し、この検出した組み合わせの衛星群に基づき受信機の速度を算出するから、ある程度の速度の算出精度を確保することのできる位置検出用の衛星群からなる基本セットに対し、さらに受信機の速度の算出精度の向上を図ることの可能な衛星を加えるか、又は、基本セットのうちの速度の算出精度の低下をもたらす衛星を除去し、これに基づき速度を算出するようにしたから、受信機の速度の算出精度をより向上させることができ、より高精度な速度の演算結果を得ることができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態を説明する。
図1は、本発明を適用した測位装置10の一例を示すブロック図である。この測位装置10は、地球の大気圏外を周回するGPS衛星及び準天頂衛星QZSSといった衛星SVから送信された電波を、アンテナ1aを介して受信する衛星電波受信機1と、当該衛星電波受信機1で受信したGPS衛星或いは準天頂衛星QZSSからの衛星電波に基づき測位演算を行い、衛星電波受信機1本体の現在位置及び速度を算出する演算処理装置3とを備え、この演算処理装置3はメモリ3aに格納された演算処理プログラムを実行して衛星電波受信機1本体の現在位置及び速度を算出し、その算出結果を表示部5に出力する。
【0024】
図2は、演算処理装置3で実行される演算処理の処理手順の概略を示すフローチャートである。各処理の詳細は後述する。
演算処理装置3では、まず、第1測位法による測位演算を行って衛星電波受信機1の現在位置を算出し(ステップS1)、次いで第1測位法による測位結果を利用して速度算出処理を行い、衛星電波受信機1の現在の速度を算出する(ステップS2)。
【0025】
次いで、測位演算の結果得た測位位置の安定性を判断し(ステップS3)、測位位置が安定していないと判断した場合には(ステップS4)、ステップS1に戻る。
一方、測位位置が安定していると判断した場合にはステップ4からステップS5に移行して第2測位法による測位演算を行い、次いで第2測位法による測位結果を利用して速度算出処理を行い、衛星電波受信機1の現在の速度を算出する(ステップS6)。
【0026】
次いで、測位終了か否かを判断し(ステップS7)、測位終了ではない場合にはステップS3に戻り、測位終了であると判断した場合には測位を終了する。
前記ステップS1の第1の測位法による測位演算は、図3に示す手順で処理を行う。まず、前回測位時の測位位置等と、衛星の軌道情報等に基づく衛星現在位置とをもとに、現時点で衛星電波を受信可能なGPS衛星やQZSS衛星(以後、捕捉衛星という。)を特定し、この捕捉衛星からの衛星電波を受信する(ステップS11)。
【0027】
次いで、受信した衛星電波の受信強度に基づいて、受信電波が直接波である信頼度が高いか否かを判断し、直接波である信頼度が高い電波である場合には、この電波の送信元の衛星を高信頼度衛星HSVとして特定する(ステップS12)。
前記衛星電波の受信強度は、受信した衛星電波に含まれるC/Aコードと衛星電波受信機1で発生しているレプリカとの相関処理を行い、例えば、図4に示す、相関結果を得てこの相関結果から、ノイズフロアの部分に対応する相関値P1と、相関ピーク値P2とを読み取り、これらの差分が、予め設定したしきい値よりも大きいとき、且つ、この衛星の仰角が予め設定したしきい値(例えば、50度程度)以上であるときに、この衛星は、高信頼度衛星HSVであると判断する。この処理を全ての捕捉衛星について行う。
【0028】
次いで、ステップS13に移行し、ステップS12で高信頼度衛星HSVが4個以上検出されたかどうかを判定する。そして、高信頼度衛星HSVが4個以上検出された場合にはステップS14に移行し、この4個以上の高信頼度衛星HSVを、ベースセットBSとして設定する。
【0029】
一方、4個以上の高信頼度衛星HSVが検出されない場合にはステップS15に移行し、高信頼度衛星HSVを除く捕捉衛星を通常衛星NSVとすると、高信頼度衛星HSVと前記通常衛星NSVの何れかとの合計4個の衛星で構成される、種類の異なる予備セットを生成する。例えば、高信頼度衛星HSVが3つであるならば、さらに通常衛星NSVを1つ加え、これを予備セットa1とする。同様に、3つの高信頼度衛星HSVに、別の通常衛星NSV′を1つ加え、これを予備セットa2とする。同様の手順で、3つの高信頼度衛星HSVを含み、且つ、組み合わせの異なる4つの衛星からなる、全ての組み合わせを生成する。
【0030】
そして、ステップS16に移行し、各組み合わせについて、測位位置の標準偏差をポジションシグマとして算出する。すなわち、各組み合わせそれぞれについて、測位演算を行い、その測位結果の標準偏差を算出しこれをポジションシグマとする。そして、高信頼度衛星HSV及び通常衛星NSVから構成される予備セットのうち、ポジションシグマが最小となる予備セットをベースセットBSとして設定する。このポジションシグマは測位結果の標準偏差であるから、ポジションシグマが小さいほど、測位結果のばらつきは小さく、測位結果は安定している。このため、ポジションシグマが小さい予備セットを使用した測位結果ほど、測位結果の信頼性が高い。このため、高信頼度衛星HSVが4個未満であっても、信頼性が高い測位結果を算出可能なベースセットBSを得ることができる。
【0031】
そして、ステップS17に移行し、このベースセットBSとして設定された4個以上の衛星からの衛星電波を利用して、衛星電波受信機1の現在位置を算出する。すなわち、ベースセットBSとして設定された衛星それぞれについて、その衛星電波の送信時刻及び受信時刻との差に基づいて擬似距離を算出すると共に、受信した衛星電波に含まれる衛星の位置情報から、現在時刻における各衛星の衛星軌道上の座標を算出し、これらに基づいて衛星電波受信機1の現在位置を推定する。そして、これを基準位置BPとする。
【0032】
次いでステップS18に移行し、ベースセットBSに含まれない通常衛星NSVを非ベース衛星NSVbとし、この非ベース衛星NSVbのそれぞれについて、次式(1)に示すように、その衛星電波の送信時刻及び受信時刻との間の時間Δtに光速cを乗算することにより、衛星電波受信機1とその衛星との間の擬似距離d1を算出する。また、ステップS19では、次式(2)に示すように、ステップS17で算出した基準位置BP(x0,y0,z0)と、非ベース衛星NSVbの衛星軌道上の現在座標(X,Y,Z)との間の距離を算出しこれを近似距離d2とする。
【0033】
d1=c×Δt ……(1)
【0034】
d2=〔(X−x0)2+(Y−y0)2+(Z−z0)2〕1/2 ……(2)
【0035】
そして、ステップS20で、非ベース衛星NSVbのそれぞれについて、擬似距離d1と近似距離d2との差分d3を算出する。そして、この差分d3がしきい値α1(例えば、50〔m〕)以下となる非ベース衛星NSVbをベースセットBSに加算し、これを第1拡張セットSet1とする。
【0036】
次いでステップS21に移行し、ステップS20で生成した第1拡張セットSet1を用い、現在位置Pnを算出する。
ここで、次式(3)は、前記(1)及び(2)式をテイラー展開したものである。
【0037】
d1−d2=h1dx+h2dy+h3dz+cdt ……(3)
【0038】
上記(3)式中、d1及びd2は既知である。(h1,h2,h3)は衛星電波受信機1から各衛星への方向ベクトル(視線ベクトル)であり、周知の方法で算出することができる。したがって、未知数は、dx、dy,dz、dtの4個であるから、4個の衛星について(3)式を生成することによって、解を求めることができる。なお(3)式では、基準位置BPを仮の現在位置(以下、「仮現在位置preP」と呼ぶ)としている。
【0039】
第1回で得られたdx,dy,dzを仮現在位置prePに加えて新たな仮現在位置prePとし、これをもとに再度計算して、解が収斂するまで繰り返し、衛星電波受信機1の現在位置Pn(x,y,z)を計算する。解が収斂したときの仮現在位置prePが衛星電波受信機1の現在位置Pn(x,y,z)である。
次いで、ステップS22に移行し、算出した衛星電波受信機1の測位位置、つまり現在位置Pn(x,y,z)を表示部5に出力する。
次に、前記図2のステップS3での安定性の判断は、図5に示す手順で行う。なお、図2のステップS2及びステップS6の速度算出処理の詳細は後述する。
【0040】
前記安定性の判断は、まず、ステップS1の第1の測位法又は後述のステップS5の第2の測位法で算出した現在位置Pnについて、その前回位置Pn−1との距離差分d4を算出する(ステップS31)。そして、この距離差分d4がしきい値α2(例えば、10〔m〕程度)以下であるかどうかを判断し(ステップS32)、距離差分d4がしきい値α2以下である場合には、この距離差分d4がしきい値α2以下であるという判断が規定回数(例えば5回)連続したかどうかを判断し、規定回数連続した場合にはステップS34に移行し、測位位置Pnは安定していると判断する。一方、ステップS32で距離差分d4がしきい値α2以下ではないと判断した場合、また、ステップS33で距離差分d4がしきい値α2以下の状態が規定回数連続していないと判断した場合にはステップS35に移行し、測位位置Pnは安定していないと判断する。
【0041】
次に、前記図2のステップS5での第2測位法による測位演算は、図6に示す手順で行う。まず、前記図3のステップS12で検出した高信頼度衛星HSVについて、擬似距離d5を算出する(ステップS41)。次いでステップS42に移行し、前回測位時の前回位置Pn−1と前回の速度ベクトルとに基づいて予測位置Pfを算出する。
すなわち、前回の測位位置Pn−1(xt-1,yt-1,zt-1)と、前回の衛星電波受信機1の速度ベクトル(vxt-1,vyt-1,vzt-1)及び前回測位位置算出時点から現在までの経過時間dtとに基づいて次式(4)から現在の予測位置Pf(xt,yt,zt)を算出する。
【0042】
xt=xt-1+vxt-1・dt
yt=yt-1+vyt-1・dt
zt=zt-1+vzt-1・dt ……(4)
【0043】
次いで、ステップS43に移行し、高信頼度衛星HSVのそれぞれについて、ステップS42で算出した予測位置Pfと、衛星軌道上の現在座標とに基づいて近似距離d6を算出する。
次いで、ステップS44に移行し、各高信頼度衛星HSVのそれぞれについて、ステップS41で算出した擬似距離d5と、ステップS43で算出した近似距離d6との差分d7を算出し、各高信頼度衛星HSVの差分d7の平均値である平均差分d7avを算出する。
【0044】
次いでステップS45に移行し、捕捉衛星のうちの通常衛星NSVのそれぞれについて擬似距離d8を算出した後、ステップS46に移行し、各通常衛星NSVのそれぞれについて、予測位置Pfと衛星軌道上の現在座標に基づいて近似距離d9を算出する。
次いでステップS47に移行し、各通常衛星NSVのそれぞれについて、ステップS45で算出した擬似距離d8と、ステップS46で算出した近似距離d9との差分d10を算出する。
【0045】
次いでステップS48に移行し、ステップS44で算出した平均差分d7avと、ステップS47で算出した差分d10との差を判定値d11として算出し、この判定値d11が予め設定した誤差しきい値w(例えば50〔m〕程度)以下となる通常衛星NSVを選択し、この選択した通常衛星と、高信頼度衛星HSVとを第2拡張セットSet2として設定する(ステップS49)。
【0046】
そして、このステップS49で特定した第2拡張セットSet2に含まれる高信頼度衛星HSV及び通常衛星NSVを用いて測位演算を行い、現在位置Pnを算出する。この現在位置Pnの算出方法は、前記図3のステップS21で説明した第1測位法による現在位置Pnの算出方法と同様であるが、第1測位法では、基準位置BPの測位を経てから測位位置Pnを測位する必要があり、測位位置Pnを算出する前にn回(n:予備セット数)測位演算を行う必要があるのに対して、第2測位方法においては、測位演算は測位位置Pnを算出するときの一度で足りる。
【0047】
そして、算出した測位位置、つまり現在位置Pnを表示部5に出力する(ステップS51)。
次に、図2のステップS2及びステップS6での速度算出処理について説明する。これらは同一の処理を行う。
【0048】
図7は、速度算出処理の概略を示すフローチャートである。まず、図2のステップS1での第1測位法による測位演算処理又はステップS5での第2測位法による測位演算処理において、測位位置の算出に用いた第1拡張セット又は第2拡張セットを構成する衛星を、アンカーセットASとして設定する(ステップS61)。
次いで、ステップS62に移行し、このアンカーセットASを含む複数の衛星に基づいて速度ベクトルを算出する、拡張法による速度算出処理を行う。
【0049】
次いで、ステップS63に移行し、アンカーセットASを構成する衛星の何れかに基づいて速度ベクトルを算出する、排他法による速度算出処理を行う。
次いで、ステップS64に移行し、ステップS62での拡張法による速度算出処理の結果得た最適速度ベクトルと、ステップS63での排他法による速度算出処理の結果得た最適速度ベクトルとのうち、精度がよい方を選択し、この速度ベクトルの算出に用いた衛星の組み合わせを、速度算出用セットとして特定する。
【0050】
そして、ステップS64で特定した速度算出用セットを構成する衛星のそれぞれについてその周波数精度に基づき周波数成分に対して重み付けを行い、重み付けを行った後の周波数成分を用いて再度速度ベクトルの算出を行う(ステップS65)。
そして、この結果得た速度ベクトルを衛星電波受信機1の速度ベクトルとし、これを表示部5に出力する(ステップS66)。
【0051】
前記図7のステップS62での拡張法による速度算出処理は、図8に示す手順で行う。まず、図7のステップS61で特定したアンカーセットASに含まれない衛星、すなわち、通常衛星からなる非アンカー衛星NSVaのそれぞれについて、その信頼度を検出し、信頼度の高いものから順に、順番を決定する。この順番は、例えば、前記位置算出処理において高信頼度衛星HSVかどうかを判断する際に算出した受信パワーや仰角に基づいて決定する(ステップS71)。
【0052】
次いで、ステップS72に移行し、アンカーセットASと非アンカー衛星NSVaとからなる拡張セットTSを生成する。具体的には、図9に示すように、アンカーセットASと、非アンカー衛星NSVaのうち信頼度が最も高い衛星とを拡張セットTS1として設定する。次に、拡張セットTS1と、非アンカー衛星NSVaのうち信頼度が2番目に高い衛星とを拡張セットTS2として設定する。同様に拡張セットTS2と、非アンカー衛星NSVaのうち、信頼度が3番目に高い衛星とを拡張セットTS3とし、以後、同様に、一つ前の拡張セットTSm−1と、信頼度がm番目に高い非アンカー衛星NSVaとを拡張セットTSmとして設定する。つまり、アンカーセットASと、非アンカー衛星NSVaとで拡張セットを生成し、且つ、非アンカー衛星NSVaのうち、信頼度が高いものから順に1つずつ非アンカー衛星NSVaを増加させて拡張セットTSを生成する。なお、図9は、衛星電波受信機1の受信チャネルが8チャネルの場合を表している。例えば、受信チャネルが12チャネルの場合には、捕捉衛星は最大12個となる。
【0053】
次いで、ステップS73に移行し、拡張セットTSのそれぞれについて、速度ベクトルを算出する。
図10は、速度ベクトルの演算方法を示す図である。
図10において、衛星電波受信機1が衛星に対して相対速度を持つ場合、ドップラ効果による周波数偏移Δf〔Hz〕は、次式(5)で表すことができる。
【0054】
Δf=fρ/c ……(5)
ただし、f:搬送波周波数
ρ:衛星電波受信機1と衛星との相対速度
c:光速
である。
【0055】
そして、Siを衛星SViへの視線の単位ベクトル、Viを衛星SViの速度ベクトル、Vを衛星電波受信機1の速度ベクトル、ρiを真の視線速度とすると、以下の(6)式の関係が成り立つ。
【0056】
(Vi−V)Si=ρi ……(6)
【0057】
ここで、ドップラ周波数(f±Δf)を測定するために、衛星電波受信機1には基準発振器が設けられている。基準発振器の周波数に誤差があると、測定したドップラ周波数(f±Δf)は(f±Δf+δf)になってしまい、相対速度ρiobs=c(±Δf+δf)/f=ρi+Δρとなってしまう。なお、Δρは、周波数測定誤差による視線速度の測定誤差である。したがって、ドップラ測定における基準発振器の周波数誤差は全ての衛星の視線速度の測定値に同一の誤差がのるため、前記(6)式は、次式(7)のようになる。なお、式(7)中のρiobsは(8)式で表される。
【0058】
(Vi−V)Si+Δρ=ρiobs ……(7)
【0059】
ρiobs=c(±Δf+δf)/f ……(8)
【0060】
(7)式において、各衛星の速度ベクトルViは、各衛星の軌道情報から算出することができる。また、衛星それぞれへの視線の単位ベクトルSiは、衛星の位置から求めることができる。このため、(7)式の未知数は、衛星電波受信機1の速度ベクトルVと視線速度の測定誤差Δρの4つである。この結果、4つの衛星の同時観測により衛星電波受信機1の速度ベクトルVを求めることができる。このとき、衛星電波受信機1の基準発振器の周波数誤差も得られ、衛星の原子周波数標準と同等の精度の周波数を取得できる。
【0061】
以上の手順により、各拡張セットTSのそれぞれについて、速度ベクトルを算出したならば、ステップS73からステップS74に移行し、各拡張セットTSの速度ベクトルのうち、その算出精度の最もよいものを選択し、これを最適速度ベクトルとする。前記速度ベクトルの精度が最もよいものの判定は、例えば、拡張セットTS毎に算出される、周波数精度の分散とPDOP(Position Dilution Of Precision)との積で算出される速度の精度に基づいて行う。前記PDOPは、衛星の配置が測位計算に与える影響を数値化した指標であって、衛星の空間配置が測位精度にどの程度の影響を与えるかの目安として定義され、PDOP値が小さいときほど測位精度が高い。
【0062】
次に、図7のステップS63での排他法による速度算出処理は、図11に示す手順で行う。
まず、図7のステップS61で設定したアンカーセットASを構成するアンカー衛星ASVのそれぞれについてその信頼度を検出し、信頼度の高いものから順に、順番を決定する。例えば、前記位置算出処理において高信頼度衛星HSVかどうかを判断する際に算出した受信パワーや仰角に基づいてその順位を決定する(ステップS81)。
次いで、ステップS82に移行し、アンカーセットASを構成する何れかのアンカー衛星ASVで構成される排他セットRSを生成する。
【0063】
具体的には、図12に示すように、まず、アンカーセットASを排他セットRS1として設定する。次に、排他セットRS1つまりアンカーセットASのうち、信頼度が最も低いアンカー衛星ASV(ASV8)を除去したものを排他セットRS2として設定する。次に、排他セットRS2のうち、信頼度が最も低いアンカー衛星ASV(ASV7)を除去しこれを排他セットRS3とする。同様に排他セットRS3のうち、信頼度が最も低いアンカー衛星ASV(ASV6)を除去しこれを排他セットRS4とし、以後、同様に、一つ前の排他セットRSk−1の中から、信頼度が最も低いアンカー衛星ASVを除去しこれを排他セットRSkとし、排他セットRSを構成するアンカー衛星ASVの数が4個となるまで一つずつ除去する。つまり、アンカーセットASを構成するアンカー衛星ASVの何れかで排他セットRSを生成し、且つ信頼度の低いものから順に1つずつアンカー衛星ASVを除去して排他セットRSを生成する。なお、図12は、衛星電波受信機1の受信チャネルが8チャネルの場合を表している。例えば受信チャネルが12チャネルの場合にはアンカーセットASとして最大12個を設定することが可能となる。
【0064】
次いで、ステップS83に移行し、以後、上述の拡張法での処理と同様の手順で、排他セットRSのそれぞれについて速度ベクトルを算出し、次いでステップS84に移行して、算出した排他セットRSの速度ベクトルのうち、その精度が最も高いものを選択し、これを最適速度ベクトルとする。
次に、図7のステップS65での重み付き速度算出処理は、図13に示す手順で行う。
【0065】
まず、図7のステップS64で特定した速度算出用セットを構成する衛星のそれぞれについて前記(7)式に対する重み付けを行う(ステップS91)。例えば、前記ステップS74で速度の算出精度が最良となる拡張セット、又は、ステップS84で速度の算出精度が最良となる排他セットを特定する際に用いた周波数精度をもとに設定し、周波数精度が高いときほど大きな重みとなるように設定する。
【0066】
次いで、ステップS92に移行し、ステップS91で設定した重みを、前記(7)式に乗算し、再度速度演算を行う。
そして、この速度演算結果を、衛星電波受信機1の速度ベクトルとして表示部5に出力する。
【0067】
ここで、上述のように、衛星電波受信機1の現在位置を算出する際、測位位置が安定していない場合には、第1測位法により演算を行い、衛星電波の受信パワーや仰角等の点からマルチパスの影響を受けにくいと予測される高信頼度衛星HSVを利用して、ポジションシグマが最小となる衛星セットをベースセットBSとして基準位置BPを算出し、この基準位置BPをもとにマルチパスの影響を受けていない通常衛星NSVを選択し、この選択した通常衛星NSVとベースセットBSとを第1拡張セットし、これを用いて現在位置を算出している。したがって、仰角の高い高信頼度衛星HSVだけでなく、マルチパスによる精度劣化が少ない衛星を含み、その衛星配置の点でも良好な第1拡張セットを利用して、位置測定を行うことによって、高精度の測位位置を得ることができる。
【0068】
そして、測位位置が安定している場合には、測位位置が安定している状態で、より高精度に測位演算を行うことのできる第2測位法を用いて演算を行っているから、衛星電波受信機1の移動速度の変化等、測位位置の安定性の変化に関わらず高精度に測位を行うことができる。
また、衛星電波受信機1の現在速度を算出する際、測位演算で用いた第1拡張セット又は第2拡張セットを用いて速度演算を行うのではなく、測位演算で用いた衛星をアンカーセットASとし、このアンカーセットASをもとに生成した、周波数精度の高い衛星からなる拡張セットTS又は排他セットRSを用いて速度演算を行っている。
【0069】
ここで、高精度な位置測定を行うことの可能な第1拡張セット或いは第2拡張セットは、必ずしも、高精度な速度測定を行うことが可能な衛星であるとは限らない。つまり、位置測定を行う場合には擬似距離精度の高い衛星が必要であるが、速度算出には、周波数精度の高い衛星が必要である。したがって、位置計測に用いた第1拡張セット或いは第2拡張セットを用いたとしても必ずしも高精度な速度算出結果を得ることはできない可能性がある。
【0070】
しかしながら上述のように、アンカーセットASに対して非アンカー衛星NSVaのうちその周波数精度のよい衛星を加えた最良の拡張セットを特定し、さらに、アンカーセットASのうち周波数精度のよい衛星で構成される最良の排他セットを特定し、これらのうち、その速度精度が最もよいものを、速度算出に用いる速度算出用セットとして選択し、つまり、衛星の組み合わせを替えながら最良な速度精度を得ることのできる組み合わせを選択するから、周波数精度の高い衛星からなる速度算出用セットとして得ることができる。
【0071】
このとき、捕捉衛星全てがアンカーセットASに含まれる場合、拡張法では、他の衛星を含む拡張セットを生成することができないため、アンカーセットASに基づく速度が最適速度ベクトルとなってしまい、アンカーセットASよりも、周波数精度の良い衛星を選択することは困難である。逆に、排他法では、アンカーセットASに4個しか衛星が含まれない場合、組み合わせの異なる排他セットを生成することができないため、アンカーセットASに基づく速度が最適速度ベクトルとなってしまい、アンカーセットASよりも周波数精度の良い衛星を選択することができない。
【0072】
しかしながら、上述のように、拡張法及び排他法の二通りの方法で、最適拡張セットと最適排他セットとを特定しこれらのうちの速度精度がより良い方を速度算出用セットとして選択するから、アンカーセットASに含まれる衛星の数や、非アンカー衛星NSVaの数等に関わらず、的確な速度算出用セットを得ることができる。
そして、このようにして選択した速度算出用セットの各衛星に対し、その周波数精度に応じて重み付けを行い、これに基づき速度演算を行うから、周波数精度を考慮し、より高精度に速度演算を行うことができる。
【0073】
また、この衛星電波受信機1は、GPS衛星及び準天頂衛星からの電波を受信可能に構成され、準天頂衛星は、少なくとも一つは日本の上空に存在するように配置された衛星であるから、少なくとも1つは高信頼度衛星HSVを確保することができ、その分、位置や速度の算出精度を確保することができる。
また、上記実施の形態においては、位置演算に用いた衛星群をアンカーセットASとし、このアンカーセットASを基準にして速度算出用の衛星群を設定している。ここで、位置の算出精度の高い衛星群は、速度の算出精度も比較的高いとみなすことができるから、位置演算に用いた衛星群をアンカーセットASとして設定することによって、速度の算出精度がより高い衛星群を効果的に検出することができ、すなわち、速度の算出精度を向上させることができる。
【0074】
また、拡張セットTSを生成する際に、アンカーセットASに対し、非アンカー衛星NSVaのうち信頼度の高いものから順に、加える数を増して拡張セットTSを生成しているから、アンカーセットASに対し、速度の算出精度の向上が期待できる衛星の組み合わせからなる拡張セットTSを効果的に生成することができる。
同様に、排他セットRSを生成する際に、アンカーセットASに対して、アンカー衛星ASVのうち信頼度の低いものから順に、排除する数を増して排他セットRSを生成しているから、速度の算出精度の低下に影響を及ぼす可能性のある衛星を効果的に除去することができ、的確な排他セットRSを生成することができる。
【0075】
なお、上記実施の形態においては、拡張法及び排他法の二通りの方法を用いて速度算出用セットを得る場合について説明したが、これに限るものではなく、例えば、拡張法或いは排他法の何れか一方のみに基づいて速度算出用セットを設定することも可能である。この場合、上述のように、アンカーセットASに含まれる衛星の数や、非アンカー衛星NSVaの数等によっては、的確な速度算出用セットを得ることができない可能性があるが、この場合には、例えば、アンカーセットASに含まれる衛星の数や、非アンカー衛星NSVaの数等によって、拡張法と排他法とを切り換えて速度算出用セットを得るようにする等、運用によって対応すればよい。そしてこのように、拡張及び排他法の何れかにより検出した速度算出用セットに対し、重み付けをすることにより、その算出精度をより向上させることができる。
【0076】
また、上記実施の形態においては、第1測位法及び第2測位法を用いて位置検出を行う場合について説明したがこれに限るものではなく、他の手順で現在位置を算出することも可能であり、要は、4個以上の衛星からの衛星電波を用いて衛星電波受信機1の現在位置を計測する位置計測手段であれば適用することができる。この場合には、位置計測手段での位置計測に用いた4個以上の衛星をアンカーセットASとして速度演算を行えばよい。また、位置の検出精度の高い衛星群は、速度の検出精度も高いと予測されることから、位置の検出精度の高い衛星群を、アンカーセットASとして設定することによって、より高精度に速度検出を行うことができる。
【0077】
また、このようにして算出した速度情報を利用したフィルタリング処理を行い、これによって測位精度の向上を図るようにしてもよい。
また、上記実施の形態においては、拡張セットTSを生成する際に、アンカーセットASに対し、非アンカー衛星を1ずつ増しながら加えて拡張セットを生成し、且つ、信頼度の高いものから順に加える場合について説明したがこれに限るものではなく、衛星の組み合わせの異なる拡張セットであればどのような組み合わせであってもよい。同様に、排他セットRSも、どのような手順でアンカーセットASを除去するようにしてもよく、衛星の組み合わせの異なる排他セットであればどのような組み合わせでもよい。
【0078】
ここで、上記実施の形態において、衛星電波受信機1が受信機に対応し、図7のステップS61の処理が基本セット設定手段に対応し、図8のステップS71、S72の処理が拡張セット生成手段に対応し、図8のステップS73、S74の処理が拡張セット選択手段に対応し、図7のステップS66の処理が受信機速度出力手段に対応している。
また、図11のステップS81及びS82の処理が排他セット生成手段に対応し、ステップS83、S84の処理が排他セット選択手段に対応している。
【0079】
また、図8のステップS71の処理が非基本衛星信頼度検出手段に対応し、図11のステップS81の処理が基本衛星信頼度検出手段に対応している。
また、ステップS74及びステップS84で、最適拡張セット又は最適排他セットを特定する際に用いた周波数精度を利用する処理が周波数精度検出手段に対応し、図7のステップS65の処理が重み付き速度算出手段に対応している。
【図面の簡単な説明】
【0080】
【図1】本発明の測位装置の一例を示すブロック図である。
【図2】図1の演算処理装置で実行される演算処理の処理手順の一例を示すフローチャートである。
【図3】図2のステップS1の第1測位法による測位演算の処理手順の一例を示すフローチャートである。
【図4】高信頼度衛星かどうかを判断するためのC/Aコードの相関結果の一例である。
【図5】図2のステップS3の測位位置が安定しているかどうかの判断手順の一例を示すフローチャートである。
【図6】図2のステップS5の第2測位法による測位演算の処理手順の一例を示すフローチャートである。
【図7】図2のステップS2及びステップS6の速度算出処理の処理手順の一例を示すフローチャートである。
【図8】図7のステップS62の拡張法による速度算出処理の処理手順の一例を示すフローチャートである。
【図9】拡張法による速度の算出方法を説明するための説明図である。
【図10】速度の算出方法を説明するための説明図である。
【図11】図7のステップS63の排他法による速度算出処理の処理手順の一例を示すフローチャートである。
【図12】排他法による速度の算出方法を説明するための説明図である。
【図13】図7のステップS65の重み付き速度算出処理の処理手順の一例を示すフローチャートである。
【符号の説明】
【0081】
1 衛星電波受信機、3 演算処理装置、5 表示部
【特許請求の範囲】
【請求項1】
衛星からの電波を受信する受信機と、
少なくとも4個以上の衛星を含む前記受信機の位置検出用の衛星群を、基本セットとして設定する基本セット設定手段と、
当該基本セット設定手段で設定した基本セットを少なくとも含む複数の衛星で構成され且つその組み合わせの異なる1以上の拡張セットを生成する拡張セット生成手段と、
当該拡張セット生成手段で生成した拡張セットそれぞれについて該拡張セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる拡張セットを選択する拡張セット選択手段と、
当該拡張セット選択手段で選択した拡張セットを速度算出用セットとし、当該速度算出用セットに基づく前記速度を、前記受信機の速度として出力する受信機速度出力手段と、を備えることを特徴とする測位装置。
【請求項2】
衛星からの電波を受信する受信機と、
少なくとも4個以上の衛星を含む前記受信機の位置検出用の衛星群を、基本セットとして設定する基本セット設定手段と、
当該基本セット設定手段で設定した基本セットに含まれる4個以上の衛星で構成され且つその組み合わせの異なる1以上の排他セットを生成する排他セット生成手段と、
当該排他セット生成手段で生成した排他セットそれぞれについて該排他セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる排他セットを選択する排他セット選択手段と、
当該排他セット選択手段で選択した排他セットを速度算出用セットとし、当該速度算出用セットに基づく前記速度を、前記受信機の速度として出力する受信機速度出力手段と、を備えることを特徴とする測位装置。
【請求項3】
衛星からの電波を受信する受信機と、
少なくとも4個以上の衛星を含む前記受信機の位置検出用の衛星群を、基本セットとして設定する基本セット設定手段と、
当該基本セット設定手段で設定した基本セットを少なくとも含む複数の衛星で構成され且つその組み合わせの異なる1以上の拡張セットを生成する拡張セット生成手段と、
当該拡張セット生成手段で生成した拡張セットそれぞれについて該拡張セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる拡張セットを選択する拡張セット選択手段と、
前記基本セット設定手段で設定した基本セットに含まれる4個以上の衛星で構成され且つその組み合わせの異なる1以上の排他セットを生成する排他セット生成手段と、
当該排他セット生成手段で生成した排他セットそれぞれについて該排他セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる排他セットを選択する排他セット選択手段と、
前記拡張セット選択手段で選択した拡張セット及び前記排他セット選択手段で選択した排他セットのうち、前記速度の算出精度が高い方を速度算出用セットとし、当該速度算出用セットに基づく前記速度を、前記受信機の速度として出力する受信機速度出力手段と、を備えることを特徴とする測位装置。
【請求項4】
前記拡張セット生成手段は、前記基本セットを構成する基本衛星を除く非基本衛星についてその信頼度を検出する非基本衛星信頼度検出手段を備え、
当該非基本衛星信頼度検出手段で検出した信頼度の並び順に前記信頼度が最良の非基本衛星から所定数の非基本衛星を、前記基本セットに加えて前記拡張セットを生成し、且つ前記基本セットに加える前記非基本衛星の数を、1ずつ増加させることを特徴とする請求項1又は請求項3記載の測位装置。
【請求項5】
前記排他セット生成手段は、前記基本セットを構成する基本衛星についてその信頼度を検出する基本衛星信頼度検出手段を備え、
当該基本衛星信頼度検出手段で検出した信頼度の並び順に前記信頼度が最低のものから所定数の基本衛星を、前記基本セットから除去して前記排他セットを生成し、且つ前記基本セットから除去する衛星数を、1ずつ増加させることを特徴とする請求項2又は請求項3記載の測位装置。
【請求項6】
前記受信機速度出力手段は、
前記速度算出用セットを構成する各衛星からの電波の周波数精度を検出する周波数精度検出手段と、
前記速度算出用セットを構成する各衛星に対し、前記周波数精度検出手段で検出した周波数精度に基づき当該周波数精度が高い衛星ほど重みが大きくなるように重み付けを行い且つ重み付けした前記衛星からの電波を用いて前記受信機の速度を算出する重み付き速度算出手段と、を備え、
当該重み付き速度算出手段で算出した速度を、前記受信機の速度として出力することを特徴とする請求項1から請求項5の何れか1項に記載の測位装置。
【請求項7】
受信機の位置検出用の4個以上の衛星群を基本セットとし、当該基本セットを少なくとも含む複数の衛星からなる衛星群と前記基本セットを構成する4個以上の衛星からなる衛星群との少なくとも何れか一方のうち、該衛星群を構成する衛星からの電波を用いて算出した前記受信機の速度の算出精度が最良となる衛星の組み合わせを検出し、この検出した組み合わせの衛星群に基づき前記受信機の速度を算出することを特徴とする測位方法。
【請求項1】
衛星からの電波を受信する受信機と、
少なくとも4個以上の衛星を含む前記受信機の位置検出用の衛星群を、基本セットとして設定する基本セット設定手段と、
当該基本セット設定手段で設定した基本セットを少なくとも含む複数の衛星で構成され且つその組み合わせの異なる1以上の拡張セットを生成する拡張セット生成手段と、
当該拡張セット生成手段で生成した拡張セットそれぞれについて該拡張セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる拡張セットを選択する拡張セット選択手段と、
当該拡張セット選択手段で選択した拡張セットを速度算出用セットとし、当該速度算出用セットに基づく前記速度を、前記受信機の速度として出力する受信機速度出力手段と、を備えることを特徴とする測位装置。
【請求項2】
衛星からの電波を受信する受信機と、
少なくとも4個以上の衛星を含む前記受信機の位置検出用の衛星群を、基本セットとして設定する基本セット設定手段と、
当該基本セット設定手段で設定した基本セットに含まれる4個以上の衛星で構成され且つその組み合わせの異なる1以上の排他セットを生成する排他セット生成手段と、
当該排他セット生成手段で生成した排他セットそれぞれについて該排他セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる排他セットを選択する排他セット選択手段と、
当該排他セット選択手段で選択した排他セットを速度算出用セットとし、当該速度算出用セットに基づく前記速度を、前記受信機の速度として出力する受信機速度出力手段と、を備えることを特徴とする測位装置。
【請求項3】
衛星からの電波を受信する受信機と、
少なくとも4個以上の衛星を含む前記受信機の位置検出用の衛星群を、基本セットとして設定する基本セット設定手段と、
当該基本セット設定手段で設定した基本セットを少なくとも含む複数の衛星で構成され且つその組み合わせの異なる1以上の拡張セットを生成する拡張セット生成手段と、
当該拡張セット生成手段で生成した拡張セットそれぞれについて該拡張セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる拡張セットを選択する拡張セット選択手段と、
前記基本セット設定手段で設定した基本セットに含まれる4個以上の衛星で構成され且つその組み合わせの異なる1以上の排他セットを生成する排他セット生成手段と、
当該排他セット生成手段で生成した排他セットそれぞれについて該排他セットを構成する衛星からの電波を用いて前記受信機の速度を算出し、該速度の算出精度が最良となる排他セットを選択する排他セット選択手段と、
前記拡張セット選択手段で選択した拡張セット及び前記排他セット選択手段で選択した排他セットのうち、前記速度の算出精度が高い方を速度算出用セットとし、当該速度算出用セットに基づく前記速度を、前記受信機の速度として出力する受信機速度出力手段と、を備えることを特徴とする測位装置。
【請求項4】
前記拡張セット生成手段は、前記基本セットを構成する基本衛星を除く非基本衛星についてその信頼度を検出する非基本衛星信頼度検出手段を備え、
当該非基本衛星信頼度検出手段で検出した信頼度の並び順に前記信頼度が最良の非基本衛星から所定数の非基本衛星を、前記基本セットに加えて前記拡張セットを生成し、且つ前記基本セットに加える前記非基本衛星の数を、1ずつ増加させることを特徴とする請求項1又は請求項3記載の測位装置。
【請求項5】
前記排他セット生成手段は、前記基本セットを構成する基本衛星についてその信頼度を検出する基本衛星信頼度検出手段を備え、
当該基本衛星信頼度検出手段で検出した信頼度の並び順に前記信頼度が最低のものから所定数の基本衛星を、前記基本セットから除去して前記排他セットを生成し、且つ前記基本セットから除去する衛星数を、1ずつ増加させることを特徴とする請求項2又は請求項3記載の測位装置。
【請求項6】
前記受信機速度出力手段は、
前記速度算出用セットを構成する各衛星からの電波の周波数精度を検出する周波数精度検出手段と、
前記速度算出用セットを構成する各衛星に対し、前記周波数精度検出手段で検出した周波数精度に基づき当該周波数精度が高い衛星ほど重みが大きくなるように重み付けを行い且つ重み付けした前記衛星からの電波を用いて前記受信機の速度を算出する重み付き速度算出手段と、を備え、
当該重み付き速度算出手段で算出した速度を、前記受信機の速度として出力することを特徴とする請求項1から請求項5の何れか1項に記載の測位装置。
【請求項7】
受信機の位置検出用の4個以上の衛星群を基本セットとし、当該基本セットを少なくとも含む複数の衛星からなる衛星群と前記基本セットを構成する4個以上の衛星からなる衛星群との少なくとも何れか一方のうち、該衛星群を構成する衛星からの電波を用いて算出した前記受信機の速度の算出精度が最良となる衛星の組み合わせを検出し、この検出した組み合わせの衛星群に基づき前記受信機の速度を算出することを特徴とする測位方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2007−248109(P2007−248109A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2006−68946(P2006−68946)
【出願日】平成18年3月14日(2006.3.14)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成18年3月14日(2006.3.14)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]