
測位装置及び測位方法
【課題】複数の測位部を有する移動端末において、アプリケーションが必要とする要求精度を満たす一方消費電力が少ない測位部を効率的に発見できるようにすること。
【解決手段】測位装置は、現在地の測位結果を出力する複数の測位部と、複数の測位部各々について有意の測位結果が得られる確率とその測位結果に対する誤差の情報とを記憶する記憶部と、記憶部に記憶されている確率及び誤差の情報を用いて、複数の測位部各々による測位結果がアプリケーションの要求精度を満たす確率を算出し、その確率及び予想される消費電力に基づいて、複数の測位部のうちの1つ以上を使用する順序を決定する制御部とを有し、複数の測位部のうちの1つ以上が順序にしたがって測位結果を出力する。
【解決手段】測位装置は、現在地の測位結果を出力する複数の測位部と、複数の測位部各々について有意の測位結果が得られる確率とその測位結果に対する誤差の情報とを記憶する記憶部と、記憶部に記憶されている確率及び誤差の情報を用いて、複数の測位部各々による測位結果がアプリケーションの要求精度を満たす確率を算出し、その確率及び予想される消費電力に基づいて、複数の測位部のうちの1つ以上を使用する順序を決定する制御部とを有し、複数の測位部のうちの1つ以上が順序にしたがって測位結果を出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は測位装置及び測位方法に関連する。
【背景技術】
【0002】
近年,携帯電話のような移動端末の位置情報を活用したサービスが高い関心を集めている。移動端末の測位方式として、グローバルポジショニングシステム(GPS)が代表的である。GPSは、測位環境が良好であれば、誤差半径が僅か数メートルの高い精度で測位することが可能である。しかし、高層ビル街等のような良好でない測位環境の場合、測位精度は劣化してしまうことに加えて、屋内では測位さえできない問題もある。このため、GPS以外の測位方式も実用化されている。そのような測位方式は、無線ローカルエリアネットワーク(WLAN)や基地局(又はアクセスポイント)を利用することで、移動端末の位置を測定する。WLANによる測位(WLAN測位又はWiFi測位)や基地局を利用した測位(基地局測位又はセル測位)は、既存の通信インフラを活用するので、移動端末に通信以外の特別な機能を必要としない。このため、市場に普及している移動端末により広く利用することができる。複数の測位方式で位置を測定する移動端末については、特許文献1、2に記載されている。
【0003】
位置情報の応用範囲は広く、携帯電話等の移動端末の位置情報を活用した多数のアプリケーションが登場している。これらのアプリケーションの利用頻度が高まると、測位に要する電力量が増加し、移動端末のバッテリーの消費が早まってしまう。特に、短い間隔で繰り返し位置情報を必要とするアプリケーションはバッテリーを激しく消費するので、移動端末の利便性が損なわれてしまうという問題が懸念される。
【0004】
一般に、GPS測位は達成可能な精度が高い反面、消費電力が大きい。また、セル測位やWLAN測位はGPS測位より精度が低いが、消費電力はGPS測位より少なくて済む。しかしながら、様々な測位方式において常に達成可能な最高の精度が得られるとは限らない。得られる精度は測位環境によって変化するからである。したがって、GPS測位、WiFi測位及びセル測位等の様々な測位方式のうちの何れが、移動端末の測位環境に相応しいかを事前に決めておくことは困難である。
【0005】
したがって、アプリケーションが要求する要求精度を満たし、かつ消費電力が最も小さい測位方式をその都度状況に応じて発見することが望ましい。そのような測位方式を発見する方法の1つは、全ての測位方式を順不同に実行し、所望の精度を満たす測位方式を発見することである。この方法の場合、要求精度を満たしかつ消費電力が最も小さい測位方式を発見できるが、発見するまでに多くの消費電力を消費してしまうという問題が懸念され、消費電力の観点からは効率的ではない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−281734号公報
【特許文献2】特表2011−509028号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の課題は、複数の測位部を有する移動端末において、アプリケーションが必要とする要求精度を満たす一方消費電力が少ない測位部を効率的に発見できるようにすることである。
【課題を解決するための手段】
【0008】
一実施例による測位装置は、
現在地の測位結果を出力する複数の測位部と、
前記複数の測位部各々について有意の測位結果が得られる確率と該測位結果に対する誤差の情報とを記憶する記憶部と、
前記記憶部に記憶されている前記確率及び前記誤差の情報を用いて、前記複数の測位部各々による測位結果がアプリケーションの要求精度を満たす確率を算出し、該確率及び予想される消費電力に基づいて、前記複数の測位部のうちの1つ以上を使用する順序を決定する制御部と
を有し、前記複数の測位部のうちの前記1つ以上が前記順序にしたがって測位結果を出力する、測位装置である。
【発明の効果】
【0009】
実施例によれば、複数の測位部を有する移動端末において、アプリケーションが必要とする要求精度を満たす一方消費電力が少ない測位部を効率的に発見できるようにすることができる。
【図面の簡単な説明】
【0010】
【図1】測位装置の機能ブロック図。
【図2】図1に示す測位装置10の記憶部12に格納されている情報の一例を示す図。
【図3】図1に示す測位装置により測位順序を決定する動作例を示すフローチャート。
【図4】決定された測位順序で測位を行う動作例を示すフローチャート。
【発明を実施するための形態】
【0011】
以下に説明する実施例は、移動端末において動作するアプリケーションが連続的な測位を必要とする場合において、必要な精度を満たす測位結果をもたらす複数の測位部の中から最適な測位部を、消費電力の観点から効率的に見つけることができる。複数の測位部は、一例として、GPS測位部、WiFi測位部、セル測位部等である。すなわち、実施例によれば、連続的に測位を要する場合において、複数の測位方式の中から、アプリケーションの要求精度を満たし且つ消費電力の小さな方式を発見する場合に、発見に要する電力量を少なく抑制することができる。
【0012】
一実施例による測位装置は、複数の測位部各々に対して、所定の地理的領域である区画毎に、測位結果が得られる確率xiと測位誤差の情報(μi、σi)を記憶部に保持しておく。i番目の測位点が属する区画について保持されている確率xi及び測位誤差の情報(μi、σi)に基づいて、要求精度ereqを満たす測位結果が得られる確率yiを計算する。この要求精度を満たす確率yiと測位に要する電力量piとを用いて、測位に使用する1つ以上の測位部及び使用する順序が決定される。測位部は、決定された順序にしたがって測位結果を出力する。これにより、要求精度を満たし且つ消費電力が小さな最適な測位部(測位方式)に効率的に辿り着くことができる。このように、要求精度を満たす確率yiと測位に要する電力量piとに基づいて決定された順に測位を行うことで、最適な測位部を発見するまでに要する消費電力を小さく抑制できる。その結果、携帯電話等の移動端末のバッテリーを従来よりも長持ちさせることができる。
【0013】
以下の観点から実施例を説明する。
【0014】
1.測位装置
2.動作
2.1 区画1における動作
2.2 区画2における動作
2.3 区画3における動作
3 変形例
3.1 変形例1
3.2 変形例2
【実施例1】
【0015】
<1.測位装置>
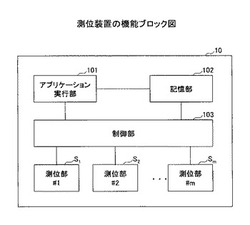
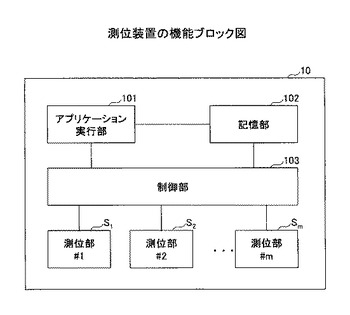
図1は実施例において使用される測位装置10の機能ブロック図を示す。測位装置は典型的には移動端末に設けられる。移動端末はユーザ又はオペレータ等により携帯可能な任意の通信装置である。一例として、移動端末は、ユーザ装置、携帯電話、情報端末、高機能携帯電話、スマートフォン、タブレット型コンピュータ、パーソナルディジタルアシスタント、携帯用パーソナルコンピュータ等であるがこれらに限定されない。図1には測位装置10に備わる様々な機能部又は処理部のうち実施例に特に関連するものが示されている。測位装置10は、アプリケーション実行部101、m個の測位部S1−Sm、記憶部102及び制御部103を少なくとも有する。
【0016】
アプリケーション実行部101は、測位装置の現在地の情報を使用するアプリケーションを実行する実行部である。そのようなアプリケーションは、例えば、地図情報とともにユーザに近辺の店舗情報を提供するものや、路線情報とともにユーザに乗換案内情報を提供するもの等であるが、これらに限定されず、位置情報を利用する適切な如何なるアプリケーションでもよい。
【0017】
m個の測位部s1−smの各々は、制御部103からの指示にしたがって現在地の測位を実行し、測位結果を返す。mは一般的には1以上の任意の自然数であるが、好ましくは2以上である。測位部の具体例は、GPS測位を行うGPS測位部、WLANにおけるアクセスポイントの位置を利用して測位を行うWiFi測位部又はWLAN測位部、セルラ通信システムの基地局の位置を利用する基地局測位部又はセル測位部等であるが、これらに限定されず、適切な如何なる測位方式による測位部が使用されてもよい。
【0018】
記憶部102は、測位装置10又は測位装置が搭載されている移動端末の動作に必要なデータ、パラメータ、ソフトウェア等を格納、保存又は保持する。特に、記憶部102は、制御部103が複数の測位部s1−smの中から現状に最適な測位部を確実に発見するのに必要な統計データを記憶している。
【0019】
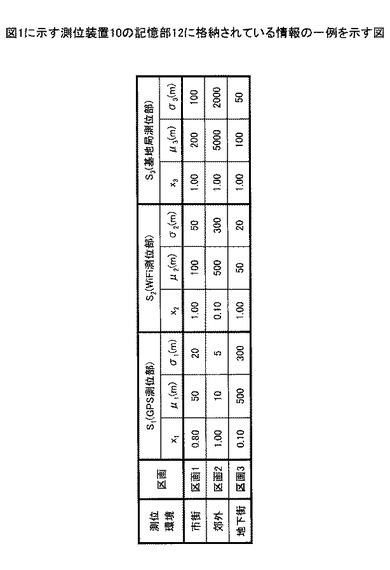
図2は記憶部102に記憶されている統計データの一例を示す。図示の統計データは、3つの測位部s1(GPS測位部)、s2(WiFi測位部)及びs3(GPS測位部)smの各々について及び3つの区画1−3各々について、有意の測位結果が得られる確率xiと、その測位結果に対する誤差半径の平均値μiと、誤差半径の標準偏差σiとを記憶している。3つの区画1−3の各々は所定の地理的領域であり、具体的には区画1が市街地に対応し、区画2が郊外に対応し、区画3が地下街に対応している。測位部の数及び区画の数はそれぞれ3つしか示されていないが具体的な数は任意である。区画は適切な如何なる方法で設定されてもよいが、好ましくは、個々の区画の範囲内で同等の測位精度が得られるように区画の範囲が設定される。例えば、基地局のセルやセクタが区画の単位として定められていてもよいし、100m四方の矩形といったメッシュとして区画の単位が定められていてもよい。図示されているような統計データは、システムにおいて固定的に維持されてもよいし、適宜更新されてもよい。適宜更新される場合は、一例として、統計データがネットワークからダウンロードされてもよい。
【0020】
また、記憶部102は各測位部siが実際に測位を行う場合に消費することになる消費電力piがどの程度になるかを示すデータも保存している。消費電力のデータは、測位部の機能が測位装置に導入された場合に記憶部102に保存されてもよいし、導入後の適切なタイミングでネットワークから通知されてもよい。
【0021】
図1の制御部103は、測位装置10における動作を制御及び実行する。測位装置10における動作は大別して2つに分けられる。(1)1つは複数の測位部s1−smのうち実際の測位に使用するものの順序(測位順序)を決める動作である。(2)もう1つは、所望の測位結果が得られるまで、決定された順序にしたがって測位部に測位を実行させる動作である。
【0022】
(1)測位順序を決定する場合、制御部103は、測位点である現在地が所属する区画についての情報を記憶部102から取得し、複数の測位部s1−sm各々(si)による測位結果がアプリケーションの要求精度を満たす確率yiを算出する。一例として、ある測位部siに対する確率yiは、その測位部siにより有意の測位結果が得られる確率xiとその測位結果に対する誤差の情報により特定される確率密度関数fi(z;μi,σi)を積分したものとの積により表現される。すなわち、確率yiは次のようにして算出されてもよい。
【0023】
【数1】

ここで、ereqはアプリケーションが要求する精度を表す(この場合、誤差半径がereq以下であることを要する)。fi(z;μi,σi)は測位点周辺における測位部siの誤差半径の確率密度関数を表す。例えば、この確率密度関数として正規分布N (μ, σ2)が用いられてもよい。この場合、(1)式は以下のように表される。
【0024】
【数2】
このようにして算出された確率(測位点周辺において測位部siが要求精度ereqを満たす確率)yiを用いて測位順序が決定される。具体的には、測位部siについて予想される消費電力piと確率yiとの比率ri=(yi/pi)の値が大きい順に、測位順序が決定される。すなわち、要求精度を満たす確率yiが高いほど比率riは大きくなり、測位順序が前(先)の方になる。逆に、要求精度を満たす確率yiが低いほど比率riは小さくなり、測位順序が後の方になる。さらに、消費電力piが小さいほど測位順序が先になり、消費電力piが大きいほど測位順序が後になる。必須ではないが、要求精度を満たす確率yiが所定の閾値T未満である測位部siは、順序が決定される測位部の候補から除外されてもよい。そのような測位部についての比率riがどんなに大きかったとしても(消費電力piがどんなに小さかったとしても)、要求精度を満たさない測位結果はアプリケーションにとって不要なものだからである。なお、測位順序を決定する際に比率ri=(yi/pi)に基づくことは必須ではない。確率yiと消費電力piとの間のこのような定性的な関係を示す任意の量が、測位順序を決定するために使用されてもよい。
【0025】
(2)制御部103は、決定した測位順序にしたがって測位部siに測位を実行させる。ある順序の測位部siによる測位結果が要求精度を満たす場合、残りの測位は中止され、測位結果がアプリケーションに渡される。例えば、3つの測位部に関する測位順序がsA、sB、sCであった場合において、測位部sAによる測位結果は要求精度を満足しなかったが、次の測位順序の測位部sBによる測位結果は要求精度を満足したとする。この場合、さらに次の測位順序のsCによる測位は行われず、測位部sBによる測位結果がアプリケーションに返され、その位置情報をアプリケーションが使用する。この場合、測位部sCによる電力を消費することなく、必要な測位結果を得ることができる。
【0026】
ところで、前述のように測位順序は、測位点である現在地が所属する区画についての有意の測位結果が得られる確率と、その測位結果に対する誤差半径の平均値と、誤差半径の標準偏差により決定されるため、制御部103は測位順序を決定する際に、必要な区画が何であるかを知っていなければならない。本実施例では、アプリケーションが連続的、継続的又は反復的に測位結果を必要とし、その連続的な測位の各々において区画は滅多に変わらないほど区画が大きく設定されている。この場合、制御部103が使用すべき区画は、前回の測位順序を決定する際に使用したものと同じ区画とすることができる。言い換えれば、反復的に行われる測位点同士の間隔が1つの区画の長さよりも十分に小さいため、前回属していた区画と今回属している区画が異なる確率は低い。ただし、このような仮定は本実施例に必須ではない。前回属していた区画と今回属している区画が異なってもよい。そのような場合には、基地局やアクセスポイントが区画の情報を報知情報やビーコン情報として移動端末(ユーザ)に通知することが考えられる。
【0027】
<2.動作>
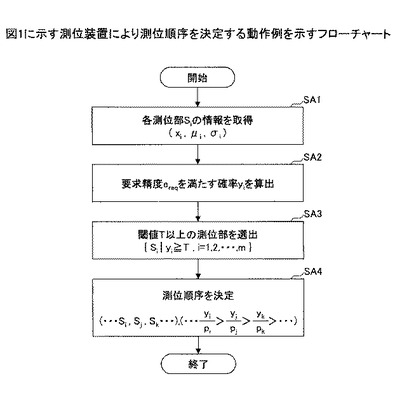
図3及び図4を参照しながら図1に示されるような測位装置10の動作を説明する。上述したように、測位装置10は、測位順序を決定する動作と、決定された測位順序で測位を実行する動作とを行う。図3は測位順序を決定するための動作例を示すフローチャートである。図4は決定された測位順序にしたがって測位を実行する動作例を示すフローチャートである。
【0028】
説明の便宜上、測位装置10は3つの測位手段s1(GPS測位部)、s2(WiFi測位部)及びs3(セル測位部)を有するとものとする。測位手段s1−s3各々の消費電力p1−p3は時不変の量であり、一例として、
p1=1.0(GPS測位部)、
p2=0.3(WiFi測位部)、及び
p3=0.2(セル測位部)
であると仮定する。また、制御部103が測位部を選出するための閾値Tは0.1に設定されているものとする。さらに、記憶部102には図2に示されるような統計データが記憶されているものとする。これらの具体的な数値は単なる一例にすぎず、適切な如何なる値が使用されてもよい。
【0029】
アプリケーションは現在地の情報を反復的に使用しながら動作するものであると仮定する。測位装置は現在地を反復的に測定し、要求精度を満たす測定結果をアプリケーションに返す。反復的な測位において、前回の測位結果が示す場所と今回の測位結果が示す場所とは比較的近く、それらはほとんどの場合同一の区画に属するものとする。ただし、この仮定は説明の簡明化を図るためのものであるにすぎず、「3.変形例」で説明するように、前回の測位結果と今回の測位結果が異なる区画に属する場合にも本実施例は適用可能である。
【0030】
以下、測位装置が区画1−3の各々に属する場合に行われる動作例を区画毎に説明する。上述したように、区画1は市街地に対応し、区画2は郊外に対応し、区画3は地下街に対応している。
【0031】
<<2.1 区画1における動作>>
図3のステップSA1において、制御部103は測位点周辺の測位部の情報を取得する。区画1の場合、記憶部102から取得される各測位部の情報は次のとおりである:
(x1,μ1,σ1)=(0.80,50,20)、
(x2,μ2,σ2)=(1.00,100,50)、及び
(x3,μ3,σ3)=(1.00,200,100)
ステップSA2において、制御部103は、測位部による測位結果が要求精度ereqを満たす確率yiを算出する。アプリケーションは、誤差半径が500mである精度を要求しているものとする(要求精度:ereq =500)。確率yiは、確率密度関数が正規分布により表現されている上記の数式(2)により算出されるものとする。ただし、このことは必須ではなく、適切な如何なる確率密度関数が使用されてもよい。数式(2)が使用される場合、測位部各々による測位結果が要求精度を満たす確率y1、y2、y3は、
y1=0.80(GPS測位部)、
y2=1.00(WiFi測位部)、及び
y3=1.00(セル測位部)
となる。
【0032】
ステップSA3において、制御部103は、要求精度を満たす確率yiが閾値T(=0.1)以上である測位部を選出する。目下の例の場合、何れの確率yiも閾値T(=0.1)より大きいので、全ての測位部s1、s2、s3が選出される。
【0033】
ステップSA4において、制御部103は、要求精度を満たす確率yiと消費電力piとの比率ri=yi/pi にしたがって測位順序を決定する。具体的には比率riの大きい順に測位順序が決定される。目下の例の場合、
r1=y1/p1=0.80(GPS測位部)、
r2=y2/p2=3.33(WiFi測位部)、及び
r3=y3/p3=5.0(セル測位部)
となる。したがって、測位順序は、s3(セル測位部)、s2(WiFi測位部)、s1(GPS測位部)の順となる。
【0034】
このようにして決定された測位順序は、要求精度以上の測位結果をもたらす測位部のうち、消費電力の小さい順に並べられたものである。
【0035】
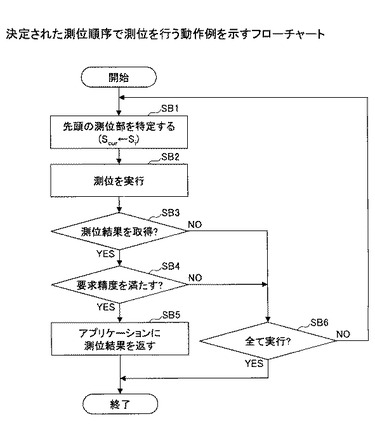
図3は、決定された測位順序にしたがって実際に測位を行うための動作例を示す。ステップSB1において、制御部103は、未測定の測定部のうち、測位順序において先頭の測位部Scurを特定する。
【0036】
ステップSB2において、特定された測位部が測位を実行する。
【0037】
ステップSB3において、何らかの有意の測位結果が得られたか否かが否かが判定される。何らかの有意の測位結果が得られた場合、フローはステップSB4に進む。
【0038】
ステップSB4において、実測された測位結果が要求精度(ereq=500)を満たすか否かが判定される。測位結果が要求精度を満たす場合、フローはステップSB5に進む。
【0039】
ステップSB5において、制御部103は、要求精度を満たす測位結果をアプリケーションに返し、測位のための処理を終了する。例えば、未測定の測定部のうち順序が先頭のセル測位部s3による測位結果が要求精度を満たしていた場合、残りの測位部(WiFi測位部s2、GPS測位部s1)による測位は行われることなく、セル測位部s3による測位結果がアプリケーションに返され、フローは終了する。これにより、消費電力を節約しながら所望の精度の測位結果を得ることができる。
【0040】
ステップSB3において、測位部による有意の測位結果が得られなかった場合(ステップSB3:NO)又は得られた測位結果が要求精度を満たしていなかった場合(ステップSB4:NO)、フローはステップSB6に進む。
【0041】
ステップSB6において、全ての測位部による測位が実行されたか否かが判定される。例えば、測位部s3による測位結果が、取得されなかった場合又は要求精度を満たさなかった場合、フローはステップSB1に戻り、次の測位部(WiFi測位部s2)が特定され、説明済みの処理が行われる。WiFi測位部s2による測位結果が要求精度を満たしていた場合、その測位結果がアプリケーションに返され、フローは終了する。そうでなかった場合、フローはステップSB1に戻り、次の測位部(GPS測位部s1)が特定され(Scur=s1)、説明済みの処理が行われる。GPS測位部s1による測位結果が要求精度を満たしていた場合、その測位結果がアプリケーションに返され、フローは終了する。
【0042】
以上のように、要求精度を満たす確率yiが高くかつ消費電力piの小さい測位部から順に測位が実行される。要求精度を満たす測位結果が実際に得られると、残りの測位部による測位は行われないので、所望の測位結果を取得するまでの消費電力を効果的に抑制できる。
【0043】
<<2.2 区画2における動作>>
次に、区画2における動作を説明する。図3のステップSA1において、制御部103は測位点周辺の測位部の情報を取得する。区画2の場合、記憶部102から取得される各測位部の情報は次のとおりである:
(x1,μ1,σ1)=(1.00,10,5)、
(x2,μ2,σ2)=(0.10,500,300)、及び
(x3,μ3,σ3)=(1.00,5000,2000)
ステップSA2において、制御部103は、測位部による測位結果が要求精度ereqを満たす確率yiを算出する。アプリケーションは、誤差半径が100mである精度を要求しているものとする(要求精度:ereq =100)。すなわち、上記の場合よりも、厳しい精度が要求されている。確率yiは、確率密度関数が正規分布により表現されている上記の数式(2)により算出されるものとすると、測位部各々による測位結果が要求精度を満たす確率y1、y2、y3は、
y1=1.00(GPS測位部)、
y2=0.01(WiFi測位部)、及び
y3=0.01(セル測位部)
となる。
【0044】
ステップSA3において、制御部103は、要求精度を満たす確率yiが閾値T(=0.1)以上である測位部を選出する。目下の例の場合、閾値T=0.1以上の確率yiをもたらす測位部はGPS測位部s1のみである。
【0045】
ステップSA4において、制御部103は、一般的には、要求精度を満たす確率yiと消費電力piとの比率ri=yi/pi にしたがって測位順序を決定する。ただし、目下の例の場合、GPS測位部s1しか存在しないので、ステップSA4は省略されてもよい。
【0046】
図3は、決定された測位順序にしたがって実際に測位を行うための動作例を示す。ステップSB1において、制御部103は、未測定の測位部のうち、測位順序において先頭の測位部(目下の例の場合、GPS測位部s1であるのでScur=s1)を特定する。
【0047】
ステップSB2において、特定された測位部が測位を実行する。
【0048】
ステップSB3において、何らかの有意の測位結果が得られたか否かが否かが判定される。何らかの有意の測位結果が得られた場合、フローはステップSB4に進む。
【0049】
ステップSB4において、実測された測位結果が要求精度(ereq=100)を満たすか否かが判定される。測位結果が要求精度を満たす場合、フローはステップSB5に進む。
【0050】
ステップSB5において、制御部103は、要求精度を満たす測位結果をアプリケーションに返し、測位のための処理を終了する。
【0051】
ステップSB3において、測位部による有意の測位結果が得られなかった場合(ステップSB3:NO)又は得られた測位結果が要求精度を満たしていなかった場合(ステップSB4:NO)、フローはステップSB6に進む。
【0052】
ステップSB6において、全ての測位部による測位が実行されたか否かが判定される。目下の例の場合、測位を実際に行うのはGPS測位部s1のみであるので、ステップSB6においてYESとなり、フローは終了する。この場合、要求精度を満たす測位結果をアプリケーションに返すことはできないが、そのような状況であることがGPS測位部s1による測位を行っただけで判明する点で本実施例は有利である。すなわち、他の測位部s2、s3による測位を行うまでもなく、要求精度を満たす測位結果をアプリケーションに返すことは不可能であるという状況を、少ない消費電力で効率的に知ることができる。
【0053】
<<2.3 区画3における動作>>
次に、区画3における動作を説明する。図3のステップSA1において、制御部103は測位点周辺の測位部の情報を取得する。区画3の場合、記憶部102から取得される各測位部の情報は次のとおりである:
(x1,μ1,σ1)=(0.10,500,300)、
(x2,μ2,σ2)=(1.00,50,20)、及び
(x3,μ3,σ3)=(1.00,100,50)
ステップSA2において、制御部103は、測位部による測位結果が要求精度ereqを満たす確率yiを算出する。アプリケーションは、誤差半径が100mである精度を要求しているものとする(要求精度:ereq =100)。確率yiは、確率密度関数が正規分布により表現されている上記の数式(2)により算出されるものとすると、測位部各々による測位結果が要求精度を満たす確率y1、y2、y3は、
y1=0.01(GPS測位部)、
y2=0.99(WiFi測位部)、及び
y3=0.50(セル測位部)
となる。
【0054】
ステップSA3において、制御部103は、要求精度を満たす確率yiが閾値T(=0.1)以上である測位部を選出する。目下の例の場合、閾値T=0.1より大きな確率yiをもたらす測位部は、WiFi測位部s2及びセル測位部s3である。
【0055】
ステップSA4において、制御部103は、要求精度を満たす確率yiと消費電力piとの比率ri=yi/pi にしたがって測位順序を決定する。具体的には比率riの大きい順に測位順序が決定される。目下の例の場合、
r2=y2/p2=3.31(WiFi測位部)、及び
r3=y3/p3=2.50(セル測位部)
となる。したがって、測位順序は、s2(WiFi測位部)、s3(セル測位部)の順となる。
【0056】
このようにして決定された測位順序は、要求精度以上の測位結果をもたらす測位部のうち、消費電力の小さい順に並べられたものである。
【0057】
図3は、決定された測位順序にしたがって実際に測位を行うための動作例を示す。ステップSB1において、制御部103は、未測定の測位部のうち、測位順序において先頭の測位部Scurを特定する。
【0058】
ステップSB2において、特定された測位部が測位を実行する。
【0059】
ステップSB3において、何らかの有意の測位結果が得られたか否かが否かが判定される。何らかの有意の測位結果が得られた場合、フローはステップSB4に進む。
【0060】
ステップSB4において、実測された測位結果が要求精度(ereq=100)を満たすか否かが判定される。測位結果が要求精度を満たす場合、フローはステップSB5に進む。
【0061】
ステップSB5において、制御部103は、要求精度を満たす測位結果をアプリケーションに返し、測位のための処理を終了する。測位順序の中で実際に測定が行われていない測位部が残っていたとしても、要求精度を満たす測位結果がアプリケーションに返された後、測位は行われない。これにより、消費電力を節約することができる。
【0062】
ステップSB3において、測位部による有意の測位結果が得られなかった場合(ステップSB3:NO)又は得られた測位結果が要求精度を満たしていなかった場合(ステップSB4:NO)、フローはステップSB6に進む。
【0063】
ステップSB6において、全ての測位部による測位が実行されたか否かが判定される。例えば、測位部s3による測位結果が、取得されなかった場合又は要求精度を満たさなかった場合、フローはステップSB1に戻り、次の測位部(セル測位部s3)が特定され、説明済みの処理が行われる。セル測位部s3による測位結果が要求精度を満たしていた場合、その測位結果がアプリケーションに返され、フローは終了する。ステップSB6において、全ての測位部による測位が実行されていた場合、フローは終了する。
【0064】
区画1、2の場合と同様に、要求精度を満たす確率が高くかつ消費電力の小さな測位部から順に測位が実行される。ただし、地下街の区画3の場合、要求精度を満たす可能性が極めて低いGPS測位部s1を除外することで、不要な電力消費を回避することができる。
【0065】
<3.変形例>
<<3.1 変形例1>> 上述したように、反復的に測位が行われる場合において、前回及び今回の測位順序を決定する際、同一の区画の統計データを使用することは必須ではない。今回の測位順序を決定する際に、前回の区画と異なる区画の統計データが使用されてもよい。そのような場合、例えば、基地局又はアクセスポイントは区画を示す報知情報又はビーコン情報を移動端末に報知することで、移動端末に搭載されている測位装置は、測位順序を決定する際に使用すべき区画を正確に知ることができる。例えば、市街地の区画1から郊外の区画3へ移った場合やその逆の場合、市街地の区画1から地下街の区画3へ移った場合やその逆の場合等が考えられる。何れにせよ、測位装置は現在の区画が何であるかを知ることができ、その区画の統計データを用いて測位順序を決定することができる。例えば、前回は市街地の区画1の統計データを使用して測位順序が決定されたとしても、移動端末が受信している報知情報が現在の区画は郊外の区画2であることを示していたとする。この場合、移動端末の測位装置の制御部103は、前回測位順序を決定するのに使用した区画1の統計データx1、μ1、σ1の代わりに、記憶部102から区画2の統計データx2、μ2、σ2を抽出し、測位順序を決定する。
【0066】
<<3.2 変形例2>>
前述の実施例における動作では、測位順序を決定する動作と、決定された測位順序で測位を実行する動作とを繰り返して行っていた。
【0067】
しかし、測位順序は、測位点である現在地が所属する区画についての有意の測位結果が得られる確率と、その測位結果に対する誤差半径の平均値と、誤差半径の標準偏差により決定される、つまり、測位順序は同一区画内においては一意であるため、アプリケーションが連続的、継続的又は反復的に測位結果を必要とする場合においては、必ずしも測位を実行する度に測位順序を決定する必要はなく、例えばある一定の測位実行回数ごとに測位順序を決定する動作をするようにしてもよい。アプリケーションが連続的、継続的又は反復的に測位結果を必要とする場合は、反復的に行われる測位点同士の間隔が1つの区画の長さよりも十分に小さいため、前回属していた区画と今回属している区画が異なる確率は低いと考えられるからである。このように、測位順序を決定する動作を省略することで、消費電力をさらに抑制することができる。
【0068】
以上本発明は特定の実施例を参照しながら説明されてきたが、それらは単なる例示に過ぎず、当業者は様々な変形例、修正例、代替例、置換例等を理解するであろう。例えば、本発明は、測位を行う移動端末を含む適切な如何なる移動通信システムに適用されてもよい。発明の理解を促すため具体的な数値例を用いて説明がなされたが、特に断りのない限り、それらの数値は単なる一例に過ぎず適切な如何なる値が使用されてもよい。発明の理解を促すため具体的な数式を用いて説明がなされたが、特に断りのない限り、それらの数式は単なる一例に過ぎず適切な如何なる数式が使用されてもよい。実施例又は項目の区分けは本発明に本質的ではなく、2以上の実施例又は項目に記載された事項が必要に応じて組み合わせて使用されてよいし、ある項目に記載された事項が、別の項目に記載された事項に(矛盾しない限り)適用されてよい。説明の便宜上、本発明の実施例に係る装置は機能的なブロック図を用いて説明されたが、そのような装置はハードウェアで、ソフトウェアで又はそれらの組み合わせで実現されてもよい。ソフトウェアは、ランダムアクセスメモリ(RAM)、フラッシュメモリ、読み取り専用メモリ(ROM)、EPROM、EEPROM、レジスタ、ハードディスク(HDD)、リムーバブルディスク、CD−ROM、データベース、サーバその他の適切な如何なる記憶媒体に用意されてもよい。本発明は上記実施例に限定されず、本発明の精神から逸脱することなく、様々な変形例、修正例、代替例、置換例等が本発明に包含される。
【符号の説明】
【0069】
10 測位装置
101 アプリケーション実行部
S1−Sm m個の測位部
102 記憶部
103 制御部
【技術分野】
【0001】
本発明は測位装置及び測位方法に関連する。
【背景技術】
【0002】
近年,携帯電話のような移動端末の位置情報を活用したサービスが高い関心を集めている。移動端末の測位方式として、グローバルポジショニングシステム(GPS)が代表的である。GPSは、測位環境が良好であれば、誤差半径が僅か数メートルの高い精度で測位することが可能である。しかし、高層ビル街等のような良好でない測位環境の場合、測位精度は劣化してしまうことに加えて、屋内では測位さえできない問題もある。このため、GPS以外の測位方式も実用化されている。そのような測位方式は、無線ローカルエリアネットワーク(WLAN)や基地局(又はアクセスポイント)を利用することで、移動端末の位置を測定する。WLANによる測位(WLAN測位又はWiFi測位)や基地局を利用した測位(基地局測位又はセル測位)は、既存の通信インフラを活用するので、移動端末に通信以外の特別な機能を必要としない。このため、市場に普及している移動端末により広く利用することができる。複数の測位方式で位置を測定する移動端末については、特許文献1、2に記載されている。
【0003】
位置情報の応用範囲は広く、携帯電話等の移動端末の位置情報を活用した多数のアプリケーションが登場している。これらのアプリケーションの利用頻度が高まると、測位に要する電力量が増加し、移動端末のバッテリーの消費が早まってしまう。特に、短い間隔で繰り返し位置情報を必要とするアプリケーションはバッテリーを激しく消費するので、移動端末の利便性が損なわれてしまうという問題が懸念される。
【0004】
一般に、GPS測位は達成可能な精度が高い反面、消費電力が大きい。また、セル測位やWLAN測位はGPS測位より精度が低いが、消費電力はGPS測位より少なくて済む。しかしながら、様々な測位方式において常に達成可能な最高の精度が得られるとは限らない。得られる精度は測位環境によって変化するからである。したがって、GPS測位、WiFi測位及びセル測位等の様々な測位方式のうちの何れが、移動端末の測位環境に相応しいかを事前に決めておくことは困難である。
【0005】
したがって、アプリケーションが要求する要求精度を満たし、かつ消費電力が最も小さい測位方式をその都度状況に応じて発見することが望ましい。そのような測位方式を発見する方法の1つは、全ての測位方式を順不同に実行し、所望の精度を満たす測位方式を発見することである。この方法の場合、要求精度を満たしかつ消費電力が最も小さい測位方式を発見できるが、発見するまでに多くの消費電力を消費してしまうという問題が懸念され、消費電力の観点からは効率的ではない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−281734号公報
【特許文献2】特表2011−509028号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の課題は、複数の測位部を有する移動端末において、アプリケーションが必要とする要求精度を満たす一方消費電力が少ない測位部を効率的に発見できるようにすることである。
【課題を解決するための手段】
【0008】
一実施例による測位装置は、
現在地の測位結果を出力する複数の測位部と、
前記複数の測位部各々について有意の測位結果が得られる確率と該測位結果に対する誤差の情報とを記憶する記憶部と、
前記記憶部に記憶されている前記確率及び前記誤差の情報を用いて、前記複数の測位部各々による測位結果がアプリケーションの要求精度を満たす確率を算出し、該確率及び予想される消費電力に基づいて、前記複数の測位部のうちの1つ以上を使用する順序を決定する制御部と
を有し、前記複数の測位部のうちの前記1つ以上が前記順序にしたがって測位結果を出力する、測位装置である。
【発明の効果】
【0009】
実施例によれば、複数の測位部を有する移動端末において、アプリケーションが必要とする要求精度を満たす一方消費電力が少ない測位部を効率的に発見できるようにすることができる。
【図面の簡単な説明】
【0010】
【図1】測位装置の機能ブロック図。
【図2】図1に示す測位装置10の記憶部12に格納されている情報の一例を示す図。
【図3】図1に示す測位装置により測位順序を決定する動作例を示すフローチャート。
【図4】決定された測位順序で測位を行う動作例を示すフローチャート。
【発明を実施するための形態】
【0011】
以下に説明する実施例は、移動端末において動作するアプリケーションが連続的な測位を必要とする場合において、必要な精度を満たす測位結果をもたらす複数の測位部の中から最適な測位部を、消費電力の観点から効率的に見つけることができる。複数の測位部は、一例として、GPS測位部、WiFi測位部、セル測位部等である。すなわち、実施例によれば、連続的に測位を要する場合において、複数の測位方式の中から、アプリケーションの要求精度を満たし且つ消費電力の小さな方式を発見する場合に、発見に要する電力量を少なく抑制することができる。
【0012】
一実施例による測位装置は、複数の測位部各々に対して、所定の地理的領域である区画毎に、測位結果が得られる確率xiと測位誤差の情報(μi、σi)を記憶部に保持しておく。i番目の測位点が属する区画について保持されている確率xi及び測位誤差の情報(μi、σi)に基づいて、要求精度ereqを満たす測位結果が得られる確率yiを計算する。この要求精度を満たす確率yiと測位に要する電力量piとを用いて、測位に使用する1つ以上の測位部及び使用する順序が決定される。測位部は、決定された順序にしたがって測位結果を出力する。これにより、要求精度を満たし且つ消費電力が小さな最適な測位部(測位方式)に効率的に辿り着くことができる。このように、要求精度を満たす確率yiと測位に要する電力量piとに基づいて決定された順に測位を行うことで、最適な測位部を発見するまでに要する消費電力を小さく抑制できる。その結果、携帯電話等の移動端末のバッテリーを従来よりも長持ちさせることができる。
【0013】
以下の観点から実施例を説明する。
【0014】
1.測位装置
2.動作
2.1 区画1における動作
2.2 区画2における動作
2.3 区画3における動作
3 変形例
3.1 変形例1
3.2 変形例2
【実施例1】
【0015】
<1.測位装置>
図1は実施例において使用される測位装置10の機能ブロック図を示す。測位装置は典型的には移動端末に設けられる。移動端末はユーザ又はオペレータ等により携帯可能な任意の通信装置である。一例として、移動端末は、ユーザ装置、携帯電話、情報端末、高機能携帯電話、スマートフォン、タブレット型コンピュータ、パーソナルディジタルアシスタント、携帯用パーソナルコンピュータ等であるがこれらに限定されない。図1には測位装置10に備わる様々な機能部又は処理部のうち実施例に特に関連するものが示されている。測位装置10は、アプリケーション実行部101、m個の測位部S1−Sm、記憶部102及び制御部103を少なくとも有する。
【0016】
アプリケーション実行部101は、測位装置の現在地の情報を使用するアプリケーションを実行する実行部である。そのようなアプリケーションは、例えば、地図情報とともにユーザに近辺の店舗情報を提供するものや、路線情報とともにユーザに乗換案内情報を提供するもの等であるが、これらに限定されず、位置情報を利用する適切な如何なるアプリケーションでもよい。
【0017】
m個の測位部s1−smの各々は、制御部103からの指示にしたがって現在地の測位を実行し、測位結果を返す。mは一般的には1以上の任意の自然数であるが、好ましくは2以上である。測位部の具体例は、GPS測位を行うGPS測位部、WLANにおけるアクセスポイントの位置を利用して測位を行うWiFi測位部又はWLAN測位部、セルラ通信システムの基地局の位置を利用する基地局測位部又はセル測位部等であるが、これらに限定されず、適切な如何なる測位方式による測位部が使用されてもよい。
【0018】
記憶部102は、測位装置10又は測位装置が搭載されている移動端末の動作に必要なデータ、パラメータ、ソフトウェア等を格納、保存又は保持する。特に、記憶部102は、制御部103が複数の測位部s1−smの中から現状に最適な測位部を確実に発見するのに必要な統計データを記憶している。
【0019】
図2は記憶部102に記憶されている統計データの一例を示す。図示の統計データは、3つの測位部s1(GPS測位部)、s2(WiFi測位部)及びs3(GPS測位部)smの各々について及び3つの区画1−3各々について、有意の測位結果が得られる確率xiと、その測位結果に対する誤差半径の平均値μiと、誤差半径の標準偏差σiとを記憶している。3つの区画1−3の各々は所定の地理的領域であり、具体的には区画1が市街地に対応し、区画2が郊外に対応し、区画3が地下街に対応している。測位部の数及び区画の数はそれぞれ3つしか示されていないが具体的な数は任意である。区画は適切な如何なる方法で設定されてもよいが、好ましくは、個々の区画の範囲内で同等の測位精度が得られるように区画の範囲が設定される。例えば、基地局のセルやセクタが区画の単位として定められていてもよいし、100m四方の矩形といったメッシュとして区画の単位が定められていてもよい。図示されているような統計データは、システムにおいて固定的に維持されてもよいし、適宜更新されてもよい。適宜更新される場合は、一例として、統計データがネットワークからダウンロードされてもよい。
【0020】
また、記憶部102は各測位部siが実際に測位を行う場合に消費することになる消費電力piがどの程度になるかを示すデータも保存している。消費電力のデータは、測位部の機能が測位装置に導入された場合に記憶部102に保存されてもよいし、導入後の適切なタイミングでネットワークから通知されてもよい。
【0021】
図1の制御部103は、測位装置10における動作を制御及び実行する。測位装置10における動作は大別して2つに分けられる。(1)1つは複数の測位部s1−smのうち実際の測位に使用するものの順序(測位順序)を決める動作である。(2)もう1つは、所望の測位結果が得られるまで、決定された順序にしたがって測位部に測位を実行させる動作である。
【0022】
(1)測位順序を決定する場合、制御部103は、測位点である現在地が所属する区画についての情報を記憶部102から取得し、複数の測位部s1−sm各々(si)による測位結果がアプリケーションの要求精度を満たす確率yiを算出する。一例として、ある測位部siに対する確率yiは、その測位部siにより有意の測位結果が得られる確率xiとその測位結果に対する誤差の情報により特定される確率密度関数fi(z;μi,σi)を積分したものとの積により表現される。すなわち、確率yiは次のようにして算出されてもよい。
【0023】
【数1】
ここで、ereqはアプリケーションが要求する精度を表す(この場合、誤差半径がereq以下であることを要する)。fi(z;μi,σi)は測位点周辺における測位部siの誤差半径の確率密度関数を表す。例えば、この確率密度関数として正規分布N (μ, σ2)が用いられてもよい。この場合、(1)式は以下のように表される。
【0024】
【数2】
このようにして算出された確率(測位点周辺において測位部siが要求精度ereqを満たす確率)yiを用いて測位順序が決定される。具体的には、測位部siについて予想される消費電力piと確率yiとの比率ri=(yi/pi)の値が大きい順に、測位順序が決定される。すなわち、要求精度を満たす確率yiが高いほど比率riは大きくなり、測位順序が前(先)の方になる。逆に、要求精度を満たす確率yiが低いほど比率riは小さくなり、測位順序が後の方になる。さらに、消費電力piが小さいほど測位順序が先になり、消費電力piが大きいほど測位順序が後になる。必須ではないが、要求精度を満たす確率yiが所定の閾値T未満である測位部siは、順序が決定される測位部の候補から除外されてもよい。そのような測位部についての比率riがどんなに大きかったとしても(消費電力piがどんなに小さかったとしても)、要求精度を満たさない測位結果はアプリケーションにとって不要なものだからである。なお、測位順序を決定する際に比率ri=(yi/pi)に基づくことは必須ではない。確率yiと消費電力piとの間のこのような定性的な関係を示す任意の量が、測位順序を決定するために使用されてもよい。
【0025】
(2)制御部103は、決定した測位順序にしたがって測位部siに測位を実行させる。ある順序の測位部siによる測位結果が要求精度を満たす場合、残りの測位は中止され、測位結果がアプリケーションに渡される。例えば、3つの測位部に関する測位順序がsA、sB、sCであった場合において、測位部sAによる測位結果は要求精度を満足しなかったが、次の測位順序の測位部sBによる測位結果は要求精度を満足したとする。この場合、さらに次の測位順序のsCによる測位は行われず、測位部sBによる測位結果がアプリケーションに返され、その位置情報をアプリケーションが使用する。この場合、測位部sCによる電力を消費することなく、必要な測位結果を得ることができる。
【0026】
ところで、前述のように測位順序は、測位点である現在地が所属する区画についての有意の測位結果が得られる確率と、その測位結果に対する誤差半径の平均値と、誤差半径の標準偏差により決定されるため、制御部103は測位順序を決定する際に、必要な区画が何であるかを知っていなければならない。本実施例では、アプリケーションが連続的、継続的又は反復的に測位結果を必要とし、その連続的な測位の各々において区画は滅多に変わらないほど区画が大きく設定されている。この場合、制御部103が使用すべき区画は、前回の測位順序を決定する際に使用したものと同じ区画とすることができる。言い換えれば、反復的に行われる測位点同士の間隔が1つの区画の長さよりも十分に小さいため、前回属していた区画と今回属している区画が異なる確率は低い。ただし、このような仮定は本実施例に必須ではない。前回属していた区画と今回属している区画が異なってもよい。そのような場合には、基地局やアクセスポイントが区画の情報を報知情報やビーコン情報として移動端末(ユーザ)に通知することが考えられる。
【0027】
<2.動作>
図3及び図4を参照しながら図1に示されるような測位装置10の動作を説明する。上述したように、測位装置10は、測位順序を決定する動作と、決定された測位順序で測位を実行する動作とを行う。図3は測位順序を決定するための動作例を示すフローチャートである。図4は決定された測位順序にしたがって測位を実行する動作例を示すフローチャートである。
【0028】
説明の便宜上、測位装置10は3つの測位手段s1(GPS測位部)、s2(WiFi測位部)及びs3(セル測位部)を有するとものとする。測位手段s1−s3各々の消費電力p1−p3は時不変の量であり、一例として、
p1=1.0(GPS測位部)、
p2=0.3(WiFi測位部)、及び
p3=0.2(セル測位部)
であると仮定する。また、制御部103が測位部を選出するための閾値Tは0.1に設定されているものとする。さらに、記憶部102には図2に示されるような統計データが記憶されているものとする。これらの具体的な数値は単なる一例にすぎず、適切な如何なる値が使用されてもよい。
【0029】
アプリケーションは現在地の情報を反復的に使用しながら動作するものであると仮定する。測位装置は現在地を反復的に測定し、要求精度を満たす測定結果をアプリケーションに返す。反復的な測位において、前回の測位結果が示す場所と今回の測位結果が示す場所とは比較的近く、それらはほとんどの場合同一の区画に属するものとする。ただし、この仮定は説明の簡明化を図るためのものであるにすぎず、「3.変形例」で説明するように、前回の測位結果と今回の測位結果が異なる区画に属する場合にも本実施例は適用可能である。
【0030】
以下、測位装置が区画1−3の各々に属する場合に行われる動作例を区画毎に説明する。上述したように、区画1は市街地に対応し、区画2は郊外に対応し、区画3は地下街に対応している。
【0031】
<<2.1 区画1における動作>>
図3のステップSA1において、制御部103は測位点周辺の測位部の情報を取得する。区画1の場合、記憶部102から取得される各測位部の情報は次のとおりである:
(x1,μ1,σ1)=(0.80,50,20)、
(x2,μ2,σ2)=(1.00,100,50)、及び
(x3,μ3,σ3)=(1.00,200,100)
ステップSA2において、制御部103は、測位部による測位結果が要求精度ereqを満たす確率yiを算出する。アプリケーションは、誤差半径が500mである精度を要求しているものとする(要求精度:ereq =500)。確率yiは、確率密度関数が正規分布により表現されている上記の数式(2)により算出されるものとする。ただし、このことは必須ではなく、適切な如何なる確率密度関数が使用されてもよい。数式(2)が使用される場合、測位部各々による測位結果が要求精度を満たす確率y1、y2、y3は、
y1=0.80(GPS測位部)、
y2=1.00(WiFi測位部)、及び
y3=1.00(セル測位部)
となる。
【0032】
ステップSA3において、制御部103は、要求精度を満たす確率yiが閾値T(=0.1)以上である測位部を選出する。目下の例の場合、何れの確率yiも閾値T(=0.1)より大きいので、全ての測位部s1、s2、s3が選出される。
【0033】
ステップSA4において、制御部103は、要求精度を満たす確率yiと消費電力piとの比率ri=yi/pi にしたがって測位順序を決定する。具体的には比率riの大きい順に測位順序が決定される。目下の例の場合、
r1=y1/p1=0.80(GPS測位部)、
r2=y2/p2=3.33(WiFi測位部)、及び
r3=y3/p3=5.0(セル測位部)
となる。したがって、測位順序は、s3(セル測位部)、s2(WiFi測位部)、s1(GPS測位部)の順となる。
【0034】
このようにして決定された測位順序は、要求精度以上の測位結果をもたらす測位部のうち、消費電力の小さい順に並べられたものである。
【0035】
図3は、決定された測位順序にしたがって実際に測位を行うための動作例を示す。ステップSB1において、制御部103は、未測定の測定部のうち、測位順序において先頭の測位部Scurを特定する。
【0036】
ステップSB2において、特定された測位部が測位を実行する。
【0037】
ステップSB3において、何らかの有意の測位結果が得られたか否かが否かが判定される。何らかの有意の測位結果が得られた場合、フローはステップSB4に進む。
【0038】
ステップSB4において、実測された測位結果が要求精度(ereq=500)を満たすか否かが判定される。測位結果が要求精度を満たす場合、フローはステップSB5に進む。
【0039】
ステップSB5において、制御部103は、要求精度を満たす測位結果をアプリケーションに返し、測位のための処理を終了する。例えば、未測定の測定部のうち順序が先頭のセル測位部s3による測位結果が要求精度を満たしていた場合、残りの測位部(WiFi測位部s2、GPS測位部s1)による測位は行われることなく、セル測位部s3による測位結果がアプリケーションに返され、フローは終了する。これにより、消費電力を節約しながら所望の精度の測位結果を得ることができる。
【0040】
ステップSB3において、測位部による有意の測位結果が得られなかった場合(ステップSB3:NO)又は得られた測位結果が要求精度を満たしていなかった場合(ステップSB4:NO)、フローはステップSB6に進む。
【0041】
ステップSB6において、全ての測位部による測位が実行されたか否かが判定される。例えば、測位部s3による測位結果が、取得されなかった場合又は要求精度を満たさなかった場合、フローはステップSB1に戻り、次の測位部(WiFi測位部s2)が特定され、説明済みの処理が行われる。WiFi測位部s2による測位結果が要求精度を満たしていた場合、その測位結果がアプリケーションに返され、フローは終了する。そうでなかった場合、フローはステップSB1に戻り、次の測位部(GPS測位部s1)が特定され(Scur=s1)、説明済みの処理が行われる。GPS測位部s1による測位結果が要求精度を満たしていた場合、その測位結果がアプリケーションに返され、フローは終了する。
【0042】
以上のように、要求精度を満たす確率yiが高くかつ消費電力piの小さい測位部から順に測位が実行される。要求精度を満たす測位結果が実際に得られると、残りの測位部による測位は行われないので、所望の測位結果を取得するまでの消費電力を効果的に抑制できる。
【0043】
<<2.2 区画2における動作>>
次に、区画2における動作を説明する。図3のステップSA1において、制御部103は測位点周辺の測位部の情報を取得する。区画2の場合、記憶部102から取得される各測位部の情報は次のとおりである:
(x1,μ1,σ1)=(1.00,10,5)、
(x2,μ2,σ2)=(0.10,500,300)、及び
(x3,μ3,σ3)=(1.00,5000,2000)
ステップSA2において、制御部103は、測位部による測位結果が要求精度ereqを満たす確率yiを算出する。アプリケーションは、誤差半径が100mである精度を要求しているものとする(要求精度:ereq =100)。すなわち、上記の場合よりも、厳しい精度が要求されている。確率yiは、確率密度関数が正規分布により表現されている上記の数式(2)により算出されるものとすると、測位部各々による測位結果が要求精度を満たす確率y1、y2、y3は、
y1=1.00(GPS測位部)、
y2=0.01(WiFi測位部)、及び
y3=0.01(セル測位部)
となる。
【0044】
ステップSA3において、制御部103は、要求精度を満たす確率yiが閾値T(=0.1)以上である測位部を選出する。目下の例の場合、閾値T=0.1以上の確率yiをもたらす測位部はGPS測位部s1のみである。
【0045】
ステップSA4において、制御部103は、一般的には、要求精度を満たす確率yiと消費電力piとの比率ri=yi/pi にしたがって測位順序を決定する。ただし、目下の例の場合、GPS測位部s1しか存在しないので、ステップSA4は省略されてもよい。
【0046】
図3は、決定された測位順序にしたがって実際に測位を行うための動作例を示す。ステップSB1において、制御部103は、未測定の測位部のうち、測位順序において先頭の測位部(目下の例の場合、GPS測位部s1であるのでScur=s1)を特定する。
【0047】
ステップSB2において、特定された測位部が測位を実行する。
【0048】
ステップSB3において、何らかの有意の測位結果が得られたか否かが否かが判定される。何らかの有意の測位結果が得られた場合、フローはステップSB4に進む。
【0049】
ステップSB4において、実測された測位結果が要求精度(ereq=100)を満たすか否かが判定される。測位結果が要求精度を満たす場合、フローはステップSB5に進む。
【0050】
ステップSB5において、制御部103は、要求精度を満たす測位結果をアプリケーションに返し、測位のための処理を終了する。
【0051】
ステップSB3において、測位部による有意の測位結果が得られなかった場合(ステップSB3:NO)又は得られた測位結果が要求精度を満たしていなかった場合(ステップSB4:NO)、フローはステップSB6に進む。
【0052】
ステップSB6において、全ての測位部による測位が実行されたか否かが判定される。目下の例の場合、測位を実際に行うのはGPS測位部s1のみであるので、ステップSB6においてYESとなり、フローは終了する。この場合、要求精度を満たす測位結果をアプリケーションに返すことはできないが、そのような状況であることがGPS測位部s1による測位を行っただけで判明する点で本実施例は有利である。すなわち、他の測位部s2、s3による測位を行うまでもなく、要求精度を満たす測位結果をアプリケーションに返すことは不可能であるという状況を、少ない消費電力で効率的に知ることができる。
【0053】
<<2.3 区画3における動作>>
次に、区画3における動作を説明する。図3のステップSA1において、制御部103は測位点周辺の測位部の情報を取得する。区画3の場合、記憶部102から取得される各測位部の情報は次のとおりである:
(x1,μ1,σ1)=(0.10,500,300)、
(x2,μ2,σ2)=(1.00,50,20)、及び
(x3,μ3,σ3)=(1.00,100,50)
ステップSA2において、制御部103は、測位部による測位結果が要求精度ereqを満たす確率yiを算出する。アプリケーションは、誤差半径が100mである精度を要求しているものとする(要求精度:ereq =100)。確率yiは、確率密度関数が正規分布により表現されている上記の数式(2)により算出されるものとすると、測位部各々による測位結果が要求精度を満たす確率y1、y2、y3は、
y1=0.01(GPS測位部)、
y2=0.99(WiFi測位部)、及び
y3=0.50(セル測位部)
となる。
【0054】
ステップSA3において、制御部103は、要求精度を満たす確率yiが閾値T(=0.1)以上である測位部を選出する。目下の例の場合、閾値T=0.1より大きな確率yiをもたらす測位部は、WiFi測位部s2及びセル測位部s3である。
【0055】
ステップSA4において、制御部103は、要求精度を満たす確率yiと消費電力piとの比率ri=yi/pi にしたがって測位順序を決定する。具体的には比率riの大きい順に測位順序が決定される。目下の例の場合、
r2=y2/p2=3.31(WiFi測位部)、及び
r3=y3/p3=2.50(セル測位部)
となる。したがって、測位順序は、s2(WiFi測位部)、s3(セル測位部)の順となる。
【0056】
このようにして決定された測位順序は、要求精度以上の測位結果をもたらす測位部のうち、消費電力の小さい順に並べられたものである。
【0057】
図3は、決定された測位順序にしたがって実際に測位を行うための動作例を示す。ステップSB1において、制御部103は、未測定の測位部のうち、測位順序において先頭の測位部Scurを特定する。
【0058】
ステップSB2において、特定された測位部が測位を実行する。
【0059】
ステップSB3において、何らかの有意の測位結果が得られたか否かが否かが判定される。何らかの有意の測位結果が得られた場合、フローはステップSB4に進む。
【0060】
ステップSB4において、実測された測位結果が要求精度(ereq=100)を満たすか否かが判定される。測位結果が要求精度を満たす場合、フローはステップSB5に進む。
【0061】
ステップSB5において、制御部103は、要求精度を満たす測位結果をアプリケーションに返し、測位のための処理を終了する。測位順序の中で実際に測定が行われていない測位部が残っていたとしても、要求精度を満たす測位結果がアプリケーションに返された後、測位は行われない。これにより、消費電力を節約することができる。
【0062】
ステップSB3において、測位部による有意の測位結果が得られなかった場合(ステップSB3:NO)又は得られた測位結果が要求精度を満たしていなかった場合(ステップSB4:NO)、フローはステップSB6に進む。
【0063】
ステップSB6において、全ての測位部による測位が実行されたか否かが判定される。例えば、測位部s3による測位結果が、取得されなかった場合又は要求精度を満たさなかった場合、フローはステップSB1に戻り、次の測位部(セル測位部s3)が特定され、説明済みの処理が行われる。セル測位部s3による測位結果が要求精度を満たしていた場合、その測位結果がアプリケーションに返され、フローは終了する。ステップSB6において、全ての測位部による測位が実行されていた場合、フローは終了する。
【0064】
区画1、2の場合と同様に、要求精度を満たす確率が高くかつ消費電力の小さな測位部から順に測位が実行される。ただし、地下街の区画3の場合、要求精度を満たす可能性が極めて低いGPS測位部s1を除外することで、不要な電力消費を回避することができる。
【0065】
<3.変形例>
<<3.1 変形例1>> 上述したように、反復的に測位が行われる場合において、前回及び今回の測位順序を決定する際、同一の区画の統計データを使用することは必須ではない。今回の測位順序を決定する際に、前回の区画と異なる区画の統計データが使用されてもよい。そのような場合、例えば、基地局又はアクセスポイントは区画を示す報知情報又はビーコン情報を移動端末に報知することで、移動端末に搭載されている測位装置は、測位順序を決定する際に使用すべき区画を正確に知ることができる。例えば、市街地の区画1から郊外の区画3へ移った場合やその逆の場合、市街地の区画1から地下街の区画3へ移った場合やその逆の場合等が考えられる。何れにせよ、測位装置は現在の区画が何であるかを知ることができ、その区画の統計データを用いて測位順序を決定することができる。例えば、前回は市街地の区画1の統計データを使用して測位順序が決定されたとしても、移動端末が受信している報知情報が現在の区画は郊外の区画2であることを示していたとする。この場合、移動端末の測位装置の制御部103は、前回測位順序を決定するのに使用した区画1の統計データx1、μ1、σ1の代わりに、記憶部102から区画2の統計データx2、μ2、σ2を抽出し、測位順序を決定する。
【0066】
<<3.2 変形例2>>
前述の実施例における動作では、測位順序を決定する動作と、決定された測位順序で測位を実行する動作とを繰り返して行っていた。
【0067】
しかし、測位順序は、測位点である現在地が所属する区画についての有意の測位結果が得られる確率と、その測位結果に対する誤差半径の平均値と、誤差半径の標準偏差により決定される、つまり、測位順序は同一区画内においては一意であるため、アプリケーションが連続的、継続的又は反復的に測位結果を必要とする場合においては、必ずしも測位を実行する度に測位順序を決定する必要はなく、例えばある一定の測位実行回数ごとに測位順序を決定する動作をするようにしてもよい。アプリケーションが連続的、継続的又は反復的に測位結果を必要とする場合は、反復的に行われる測位点同士の間隔が1つの区画の長さよりも十分に小さいため、前回属していた区画と今回属している区画が異なる確率は低いと考えられるからである。このように、測位順序を決定する動作を省略することで、消費電力をさらに抑制することができる。
【0068】
以上本発明は特定の実施例を参照しながら説明されてきたが、それらは単なる例示に過ぎず、当業者は様々な変形例、修正例、代替例、置換例等を理解するであろう。例えば、本発明は、測位を行う移動端末を含む適切な如何なる移動通信システムに適用されてもよい。発明の理解を促すため具体的な数値例を用いて説明がなされたが、特に断りのない限り、それらの数値は単なる一例に過ぎず適切な如何なる値が使用されてもよい。発明の理解を促すため具体的な数式を用いて説明がなされたが、特に断りのない限り、それらの数式は単なる一例に過ぎず適切な如何なる数式が使用されてもよい。実施例又は項目の区分けは本発明に本質的ではなく、2以上の実施例又は項目に記載された事項が必要に応じて組み合わせて使用されてよいし、ある項目に記載された事項が、別の項目に記載された事項に(矛盾しない限り)適用されてよい。説明の便宜上、本発明の実施例に係る装置は機能的なブロック図を用いて説明されたが、そのような装置はハードウェアで、ソフトウェアで又はそれらの組み合わせで実現されてもよい。ソフトウェアは、ランダムアクセスメモリ(RAM)、フラッシュメモリ、読み取り専用メモリ(ROM)、EPROM、EEPROM、レジスタ、ハードディスク(HDD)、リムーバブルディスク、CD−ROM、データベース、サーバその他の適切な如何なる記憶媒体に用意されてもよい。本発明は上記実施例に限定されず、本発明の精神から逸脱することなく、様々な変形例、修正例、代替例、置換例等が本発明に包含される。
【符号の説明】
【0069】
10 測位装置
101 アプリケーション実行部
S1−Sm m個の測位部
102 記憶部
103 制御部
【特許請求の範囲】
【請求項1】
現在地の測位結果を出力する複数の測位部と、
アプリケーションを実行する実行部と、
前記複数の測位部各々について有意の測位結果が得られる確率と該測位結果に対する誤差の情報とを記憶する記憶部と、
前記記憶部に記憶されている前記確率及び前記誤差の情報を用いて、前記複数の測位部各々による測位結果がアプリケーションの要求精度を満たす確率を算出し、該確率及び予想される消費電力に基づいて、前記複数の測位部のうちの1つ以上を使用する順序を決定する制御部と
を有し、前記複数の測位部のうちの前記1つ以上が前記順序にしたがって測位結果を出力する、測位装置。
【請求項2】
前記制御部は、測位部による測位結果が前記要求精度を満たす前記確率と該測位部が消費すると予想される消費電力との比率にしたがって、前記順序を決定する、請求項1記載の測位装置。
【請求項3】
前記制御部は、前記複数の測位部のうち測位結果が前記要求精度を満たす確率が閾値以上である1つ以上の測位部について前記順序を決定する、請求項1又は2に記載の測位装置。
【請求項4】
前記記憶部が、前記複数の測位部各々について及び複数の地理的領域各々について、有意の測位結果が得られる確率と該測位結果に対する誤差の情報とを記憶しており、
前記制御部は、複数の地理的領域のうち一の地理的領域について前記記憶部が記憶している確率及び誤差の情報を使用して前記順序を決定する請求項1ないし3の何れか1項に記載の測位装置。
【請求項5】
前記実行部により実行される前記アプリケーションが現在地の情報を連続的に利用するものであり、
前記制御部は、前記複数の地理的領域のうち前回の測位で得た位置を含む地理的領域について前記記憶部が記憶している確率及び誤差の情報を、今回の順序を決定する際に使用する、請求項4に記載の測位装置。
【請求項6】
前記制御部は、前記測位結果を出力する所定の回数ごとに前記順序を決定する請求項1ないし5の何れか1項に記載の測位装置。
【請求項7】
前記要求精度を満たす測位結果が得られるまで、前記複数の測位部のうちの前記1つ以上が前記順序にしたがって測位結果を出力する、請求項1ないし6の何れか1項に記載の測位装置。
【請求項8】
前記順序で指定される或る測位部の測位結果が前記要求精度を満たした場合、前記順序において該測位部より後の測位部は測位結果を出力しない、請求項7記載の測位装置。
【請求項9】
ある測位部による測位結果が前記アプリケーションにより要求される要求精度を満たす確率は、該測位部により有意の測位結果が得られる確率と該測位結果に対する誤差の情報により特定される確率密度関数を積分したものとの積により表現される、請求項1ないし8の何れか1項に記載の測位装置。
【請求項10】
前記誤差の情報が、測位結果の誤差半径の平均値及び標準偏差により表現される、請求項1ないし9の何れか1項に記載の測位装置。
【請求項11】
当該測位装置が移動端末に設けられている、請求項1ないし6の何れか1項に記載の測位装置。
【請求項12】
現在地の測位結果を出力する複数の測位部と、
前記複数の測位部各々について有意の測位結果が得られる確率と該測位結果に対する誤差の情報とを記憶する記憶部と
を有する測位装置において使用される測位方法であって、
前記記憶部に記憶されている前記確率及び前記誤差の情報を用いて、前記複数の測位部各々による測位結果がアプリケーションの要求精度を満たす確率を算出し、該確率及び予想される消費電力に基づいて、前記複数の測位部のうちの1つ以上を使用する順序を決定し、
前記複数の測位部のうちの前記1つ以上が前記順序にしたがって測位結果を出力するステップ
を有する測位方法。
【請求項1】
現在地の測位結果を出力する複数の測位部と、
アプリケーションを実行する実行部と、
前記複数の測位部各々について有意の測位結果が得られる確率と該測位結果に対する誤差の情報とを記憶する記憶部と、
前記記憶部に記憶されている前記確率及び前記誤差の情報を用いて、前記複数の測位部各々による測位結果がアプリケーションの要求精度を満たす確率を算出し、該確率及び予想される消費電力に基づいて、前記複数の測位部のうちの1つ以上を使用する順序を決定する制御部と
を有し、前記複数の測位部のうちの前記1つ以上が前記順序にしたがって測位結果を出力する、測位装置。
【請求項2】
前記制御部は、測位部による測位結果が前記要求精度を満たす前記確率と該測位部が消費すると予想される消費電力との比率にしたがって、前記順序を決定する、請求項1記載の測位装置。
【請求項3】
前記制御部は、前記複数の測位部のうち測位結果が前記要求精度を満たす確率が閾値以上である1つ以上の測位部について前記順序を決定する、請求項1又は2に記載の測位装置。
【請求項4】
前記記憶部が、前記複数の測位部各々について及び複数の地理的領域各々について、有意の測位結果が得られる確率と該測位結果に対する誤差の情報とを記憶しており、
前記制御部は、複数の地理的領域のうち一の地理的領域について前記記憶部が記憶している確率及び誤差の情報を使用して前記順序を決定する請求項1ないし3の何れか1項に記載の測位装置。
【請求項5】
前記実行部により実行される前記アプリケーションが現在地の情報を連続的に利用するものであり、
前記制御部は、前記複数の地理的領域のうち前回の測位で得た位置を含む地理的領域について前記記憶部が記憶している確率及び誤差の情報を、今回の順序を決定する際に使用する、請求項4に記載の測位装置。
【請求項6】
前記制御部は、前記測位結果を出力する所定の回数ごとに前記順序を決定する請求項1ないし5の何れか1項に記載の測位装置。
【請求項7】
前記要求精度を満たす測位結果が得られるまで、前記複数の測位部のうちの前記1つ以上が前記順序にしたがって測位結果を出力する、請求項1ないし6の何れか1項に記載の測位装置。
【請求項8】
前記順序で指定される或る測位部の測位結果が前記要求精度を満たした場合、前記順序において該測位部より後の測位部は測位結果を出力しない、請求項7記載の測位装置。
【請求項9】
ある測位部による測位結果が前記アプリケーションにより要求される要求精度を満たす確率は、該測位部により有意の測位結果が得られる確率と該測位結果に対する誤差の情報により特定される確率密度関数を積分したものとの積により表現される、請求項1ないし8の何れか1項に記載の測位装置。
【請求項10】
前記誤差の情報が、測位結果の誤差半径の平均値及び標準偏差により表現される、請求項1ないし9の何れか1項に記載の測位装置。
【請求項11】
当該測位装置が移動端末に設けられている、請求項1ないし6の何れか1項に記載の測位装置。
【請求項12】
現在地の測位結果を出力する複数の測位部と、
前記複数の測位部各々について有意の測位結果が得られる確率と該測位結果に対する誤差の情報とを記憶する記憶部と
を有する測位装置において使用される測位方法であって、
前記記憶部に記憶されている前記確率及び前記誤差の情報を用いて、前記複数の測位部各々による測位結果がアプリケーションの要求精度を満たす確率を算出し、該確率及び予想される消費電力に基づいて、前記複数の測位部のうちの1つ以上を使用する順序を決定し、
前記複数の測位部のうちの前記1つ以上が前記順序にしたがって測位結果を出力するステップ
を有する測位方法。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−247366(P2012−247366A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−120838(P2011−120838)
【出願日】平成23年5月30日(2011.5.30)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月30日(2011.5.30)
【出願人】(392026693)株式会社エヌ・ティ・ティ・ドコモ (5,876)
【Fターム(参考)】
[ Back to top ]