
測位装置及び測位方法
【課題】アンテナアレイを用いることなく、平面方向における位置関係を測位して、測位した位置関係を通知する測位装置及び測位方法を提供する。
【解決手段】測位装置100は、第1アンテナ、第2アンテナ及び第3アンテナのうち、いずれかのアンテナ140と、第1アンテナと第2アンテナとの第1距離と、第1アンテナと第3アンテナとの第2距離と、第2アンテナと第3アンテナとの第3距離とのうち、無線通信により測距された第1距離及び第2距離を取得する取得部112と、第1〜第3距離に基づいて、各アンテナを結ぶ線から成る三角形の内角を算出し、各アンテナの位置関係を測位する測位部113と、第2アンテナにおける第1内角及び第3アンテナにおける第2内角のいずれも鈍角でない場合、位置関係を通知する判定部114と、を備える。
【解決手段】測位装置100は、第1アンテナ、第2アンテナ及び第3アンテナのうち、いずれかのアンテナ140と、第1アンテナと第2アンテナとの第1距離と、第1アンテナと第3アンテナとの第2距離と、第2アンテナと第3アンテナとの第3距離とのうち、無線通信により測距された第1距離及び第2距離を取得する取得部112と、第1〜第3距離に基づいて、各アンテナを結ぶ線から成る三角形の内角を算出し、各アンテナの位置関係を測位する測位部113と、第2アンテナにおける第1内角及び第3アンテナにおける第2内角のいずれも鈍角でない場合、位置関係を通知する判定部114と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無線通信により測位する測位装置及び測位方法に関する。
【背景技術】
【0002】
電動車両(EV:Electric Vehicle)、及びプラグイン・ハイブリッド車両(PHV:Plug−in Hybrid Vehicle)は、走行音が小さいため、これら車両の接近を人が気付きにくい状況が起こり得る。そこで、車両の走行状態を想起させる音を、これら車両から発音させることが提案されている(非特許文献1及び2参照)。
【0003】
しかしながら、車両等から発音させても、場合によって音は聞こえないことがある。また、車両等から発音された音は、場合によって騒音となることがある。
【0004】
また、無線通信を用いて測距する測距方式として、受信信号強度(RSSI:Received Signal Strength Indicator)方式、往復遅延時間(RTT:Round Trip Time)方式がある。また、無線通信を用いて電波の到達角度を検出する方式として、AOA(Angle of Arrival)方式が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許出願公開第2004/0235497号明細書
【非特許文献】
【0006】
【非特許文献1】「ハイブリッド車等の静音性に関する対策(報告)」、国土交通省、平成22年1月29日
【非特許文献2】「ハイブリッド車等の静音性に関する対策のガイドライン」、国土交通省、平成22年1月29日
【発明の概要】
【発明が解決しようとする課題】
【0007】
測位装置を携帯した人と測位装置を備えた車両との位置関係を、無線通信を用いて測位するとした場合、RSSI方式、及びRTT方式では、人と車両との距離を単に測距するのみであるため、平面方向における、人と車両との位置関係を得ることはできなかった。
【0008】
また、人と車両との平面方向における位置関係を測位するため、仮にAOA方式を用いて電波の到達角度を検出するとした場合、電波の複数の到達角度を網羅するようにアンテナアレイを配置しなければならない。
【0009】
本発明は、前記の諸点に鑑みてなされたものであり、アンテナアレイを用いることなく、平面方向における位置関係を測位して、測位した位置関係を通知する測位装置及び測位方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明は、上記の課題を解決するためになされたものであり、第1アンテナ、第2アンテナ、及び第3アンテナのうち、いずれかのアンテナと、前記第1アンテナと前記第2アンテナとの第1距離と、前記第1アンテナと前記第3アンテナとの第2距離と、前記第2アンテナと前記第3アンテナとの第3距離とのうち、無線通信により測距された前記第1距離及び前記第2距離を取得する取得部と、前記取得部が取得した前記第1距離及び前記第2距離と、所定の前記第3距離と、に基づいて、前記第1アンテナと前記第2アンテナとを結ぶ第1の線と、前記第1アンテナと前記第3アンテナとを結ぶ第2の線と、前記第2アンテナと前記第3アンテナとを結ぶ第3の線と、から成る三角形の内角のうち、前記第1の線と前記第3の線とが成す第1内角、及び前記第2の線と前記第3の線とが成す第2内角を算出することにより、前記第1アンテナと前記第2アンテナと前記第3アンテナとの位置関係を測位する測位部と、前記第1内角及び前記第2内角の少なくとも一方が鈍角であるか否かを判定し、前記第1内角及び前記第2内角のいずれも鈍角でない場合、前記位置関係を通知する判定部と、を備えることを特徴とする測位装置である。
【0011】
また、本発明は、前記測位部が、余弦定理に基づいて、前記内角を算出することを特徴とする測位装置である。
【0012】
また、本発明は、前記第3距離が、移動体の幅であることを特徴とする測位装置である。
【0013】
また、本発明は、前記判定部が、前記第1内角及び前記第2内角の一方が鈍角であるか否かを判定することにより、前記移動体の移動方向の延長上に前記第1アンテナがあるか否かを判定することを特徴とする測位装置である。
【0014】
また、本発明は、前記取得部が、インパルス信号に基づいて測距された前記第1距離及び前記第2距離を取得することを特徴とする測位装置である。
【0015】
本発明は、第1アンテナ、第2アンテナ、及び第3アンテナのうち、いずれかのアンテナを備える測位装置における測位方法であって、取得部が、前記第1アンテナと前記第2アンテナとの第1距離と、前記第1アンテナと前記第3アンテナとの第2距離と、前記第2アンテナと前記第3アンテナとの第3距離とのうち、無線通信により測距された前記第1距離及び前記第2距離を取得する過程と、測位部が、前記取得部が取得した前記第1距離及び前記第2距離と、所定の前記第3距離と、に基づいて、前記第1アンテナと前記第2アンテナとを結ぶ第1の線と、前記第1アンテナと前記第3アンテナとを結ぶ第2の線と、前記第2アンテナと前記第3アンテナとを結ぶ第3の線と、から成る三角形の内角のうち、前記第1の線と前記第3の線とが成す第1内角、及び前記第2の線と前記第3の線とが成す第2内角を算出することにより、前記第1アンテナと前記第2アンテナと前記第3アンテナとの位置関係を測位する過程と、判定部が、前記第1内角及び前記第2内角の少なくとも一方が鈍角であるか否かを判定し、前記第1内角及び前記第2内角のいずれも鈍角でない場合、前記位置関係を通知する過程と、を有することを特徴とする測位方法である。
【発明の効果】
【0016】
本発明によれば、測位装置は、各測位装置が備える各アンテナを結ぶ線から成る三角形の第1内角及び第2内角を算出し、第1内角及び第2内角のいずれも鈍角でない場合、各アンテナの位置関係を通知する。これにより、測位装置は、アンテナアレイを用いることなく、平面方向における位置関係を測位して、測位した位置関係を通知することができる。
【図面の簡単な説明】
【0017】
【図1】各アンテナの平面方向における位置関係の例を示す図である。
【図2】一実施形態における、測位装置の構成図である。
【発明を実施するための形態】
【0018】
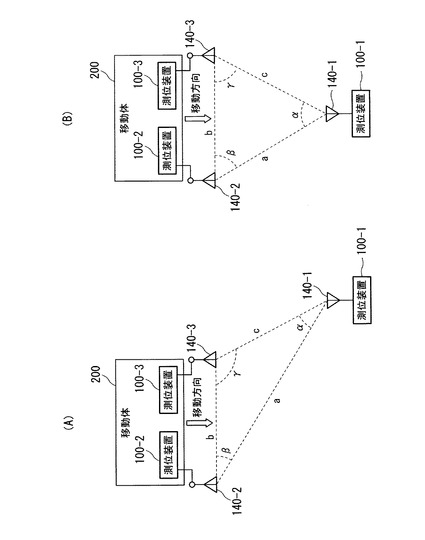
本発明の実施形態について図面を参照して詳細に説明する。図1には、各アンテナの平面方向における位置関係の例が示されている。測位装置100−n(nは、符号1〜3)は、アンテナ140−nを備える。
【0019】
測位装置100−1は、一例として、人に携帯されているものとする。また、測位装置100−2及び100−3は、一例として、移動体(例えば、車両)200の幅方向に、その幅bだけ離して移動体200に備えられているものとする。また、移動体200は、幅方向と直角な方向(図1における矢印方向)に移動しているものとする。
【0020】
図1(A)には、アンテナ140−1の位置が、移動体200の移動方向の延長上にない場合の例が示されている。また、図1(B)には、アンテナ140−1の位置が、移動体200の移動方向の延長上にある場合の例が示されている。
【0021】
測位装置100−1は、アンテナ140−1とアンテナ140−2との距離aを、無線通信により測距する。また、測位装置100−1は、アンテナ140−1とアンテナ140−3との距離cを、無線通信により測距する。ここで、測位装置100−1は、超広帯域無線(UWB:Ultra Wide Band)における変調されたインパルス信号(拡散信号)が、自装置のアンテナと他の測位装置のアンテナとの間を往復した時間に基づいて、自装置のアンテナと他の測位装置のアンテナとの距離を測距する。また、測位装置100−1は、移動体200の幅bを示す情報を、測位装置100−2又は100−3から無線通信により受信する。
【0022】
測位装置100−1は、距離a、b及びcに基づいて、アンテナ140−1とアンテナ140−2とを結ぶ第1の線と、アンテナ140−1とアンテナ140−3とを結ぶ第2の線と、アンテナ140−2とアンテナ140−3とを結ぶ第3の線と、から成る三角形の内角のうち、第1の線と第3の線とが成す内角β、及び第2の線と第3の線とが成す内角γを、余弦定理によって算出する。測位装置100−1は、内角を算出することにより、アンテナ140−1とアンテナ140−2とアンテナ140−3との位置関係を測位する。内角βについて、余弦定理は、式(1)で表される。
【0023】
【数1】

【0024】
ここで、余弦が値0以上(cosβ≧0)であれば、内角βは、0≦β≦(π/2)の範囲にあり、鋭角又は直角である。一方、余弦が負値(cosβ<0)であれば、内角βは、(π/2)<β<πの範囲にあり、鈍角である。内角α及びγについても同様である。
【0025】
測位装置100−1は、算出した内角β及びγの一方が鈍角であるか否かを判定する。内角β及びγのいずれかが鈍角である場合、図1(A)に示すように、アンテナ140−1の位置は、移動体200の移動方向の延長上にない。
【0026】
一方、内角β及びγのいずれも鈍角でない場合、図1(B)に示すように、アンテナ140−1の位置は、移動体200の移動方向の延長上にある。内角β及びγのいずれも鈍角でない場合、測位装置100−1は、アンテナ140−1とアンテナ140−2とアンテナ140−3との位置関係を示す情報、例えば、アンテナ140−1の位置が移動体200の移動方向の延長上にあることを、測位装置100−1を携帯している人に通知する。これにより、測位装置100−1を携帯している人は、移動体200の移動方向の延長上に、測位装置100−1を携帯する自らが位置していることを知ることができる。
【0027】
同様に、内角β及びγのいずれも鈍角でない場合、測位装置100−2及び100−3の少なくとも一方は、アンテナ140−1とアンテナ140−2とアンテナ140−3との位置関係を示す情報、例えば、測位装置100−1を携帯している人の位置が、移動体200の移動方向の延長上にあることを、移動体200を操縦する操縦者に通知する。
【0028】
ここで、測位装置100−2及び100−3は、アンテナ140−1とアンテナ140−2とアンテナ140−3との位置関係を自ら算出してもよいし、各アンテナの位置関係を算出した測位装置100−1から、各アンテナの位置関係を示す情報(データ)を無線通信により受信してもよい。
【0029】
次に、測位装置100の構成を説明する。
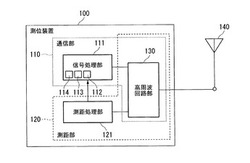
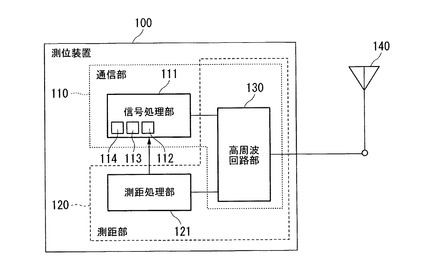
図2は、一実施形態における、測位装置の構成図である。測位装置100は、通信部110と、測距部120と、アンテナ140とを備える。ここで、通信部110は、信号処理部111と、高周波回路部130とを備える。また、測距部120は、測距処理部121と、高周波回路部130とを備える。
【0030】
アンテナ140は、超広帯域無線(UWB)における変調されたインパルス信号(拡散信号)を、他の測位装置から無線通信によって受信し、受信したインパルス信号を高周波回路部130に出力する。また、アンテナ140には、変調されたインパルス信号が高周波回路部130から入力される。アンテナ140は、高周波回路部130から入力された変調されたインパルス信号を、他の測位装置に無線通信により送信する。
【0031】
高周波回路部130には、アンテナ140が無線通信により他の測位装置から受信した変調されたインパルス信号が、アンテナ140から入力される。高周波回路部130は、アンテナ140から入力された変調されたインパルス信号を復調して、復調したインパルス信号を信号処理部111及び測距処理部121に出力する。
【0032】
また、高周波回路部130には、信号処理部111及び測距処理部121から、インパルス信号が入力される。高周波回路部130は、信号処理部111及び測距処理部121から入力されたインパルス信号を変調して、アンテナ140に出力する。
【0033】
測距処理部121は、インパルス信号を高周波回路部130に出力する。また、測距処理部121には、高周波回路部130が復調したインパルス信号が、高周波回路部130から入力される。測距処理部121は、例えば、インパルス信号を用いる超広帯域無線(インパルス型UWB)、RSSI方式、又はRTT方式により、自装置のアンテナと他の測位装置のアンテナとの距離を測距する。例えば、インパルス型UWBによる場合、測距処理部121は、高周波回路部130に出力したインパルス信号と、高周波回路部130から入力された復調されたインパルス信号とに基づいて、自装置のアンテナと他の測位装置のアンテナとの間をインパルス信号が往復した時間を算出する。また、測距処理部121は、自装置のアンテナと他の測位装置のアンテナとの間をインパルス信号が往復した時間に基づいて、自装置のアンテナと他の測位装置のアンテナとの距離を測距する。また、測距処理部121は、測位を繰り返し実行することで、測位装置のアンテナ間の距離の変化を検出する。
【0034】
また、測距処理部121は、測距した距離を、測位装置毎に信号処理部111に出力する。ここで、測距処理部121は、自装置を識別する識別情報(自装置ID)をインパルス信号に乗せて、自装置と他の測位装置との間で無線通信により送受信させてもよい。これにより、測距処理部121は、他の測位装置に自装置を識別させることができる。また、測距処理部121は、他の測位装置を識別することができる。
【0035】
信号処理部111は、取得部112と、測位部113と、判定部114とを備える。取得部112は、無線通信により測距された距離を、測距処理部121から測位装置毎に取得して、測位部113に転送する。また、信号処理部111は、インパルス信号にデータを乗せて、他の装置と通信する。このデータは、例えば、無線通信により測距されたアンテナ間の距離を示すデータであってもよいし、各アンテナの位置関係を示す情報(データ)であってもよい。
【0036】
測位部113は、取得部112が転送した測位装置毎の距離と、所定の距離とに基づいて、内角β及びγ(図1を参照)を、余弦定理によって算出する。ここで、所定の距離とは、移動体に備えられたアンテナ間の距離である。例えば、これらのアンテナは、移動体の幅方向に、その幅だけ離して備えられてもよい。なお、この所定の距離を示す情報は、自装置が備える記憶部(不図示)に予め記憶されていてもよいし、測位部113又は信号処理部111が、他の測位装置から無線通信により受信してもよい。
【0037】
また、この所定の距離を示す情報は、移動体(例えば、車両)の種別(例えば、大型、小型)を示す情報であってもよい。この場合、測位部113は、移動体の種別を示す情報に応じて、内角を算出する際に用いる所定の距離を定めてもよい。例えば、測位部113は、他の測位装置から受信した、移動体の種別を示す情報が「車両,大型」を示した場合、所定の距離(車両の幅)を2.5[m]と定めてもよい。
【0038】
測位部113は、各測位装置が備える各アンテナを結ぶ線から成る三角形の内角β及びγ(図1を参照)を、余弦定理によって算出することにより、各アンテナ間の位置関係を測位する。また、測位部113は、算出した内角β及びγを、判定部114に出力する。
【0039】
判定部114は、内角β及びγの一方が鈍角であるか否かを判定し、内角β及びγのいずれも鈍角でない場合、各アンテナの位置関係を示す情報を通知する。例えば、判定部114は、測位装置100−nが備える光源(不図示)を用いて、位置関係を示す情報を通知してもよい。例えば、判定部114は、光源を点滅させることにより、測位装置100−1の位置が移動体200の移動方向の延長上にあることを、測位装置100−1を携帯している人、及び移動体200を操縦する操縦者に通知する。
【0040】
以上のように、測位装置100は、アンテナ140−1、アンテナ140−2、及びアンテナ140−3のうち、いずれかのアンテナと、アンテナ140−1とアンテナ140−2との距離aと、アンテナ140−1とアンテナ140−3との距離cと、アンテナ140−2とアンテナ140−3との距離bとのうち、無線通信により測距された距離a及びcを取得する取得部112と、取得部112が取得した距離a及びcと、所定の距離bと、に基づいて、アンテナ140−1とアンテナ140−2とを結ぶ第1の線と、アンテナ140−1とアンテナ140−3とを結ぶ第2の線と、アンテナ140−2とアンテナ140−3とを結ぶ第3の線と、から成る三角形の内角のうち、第1の線と第3の線とが成す内角β、及び第2の線と第3の線とが成す内角γを算出することにより、アンテナ140−1とアンテナ140−2とアンテナ140−3との位置関係を測位する測位部113と、内角β及びγの一方が鈍角であるか否かを判定し、内角β及びγのいずれも鈍角でない場合、位置関係を通知する判定部114と、を備える。
【0041】
これにより、測位装置は、アンテナアレイを用いることなく、平面方向における位置関係を測位して、測位した位置関係を通知することができる。また、測位装置は、測位を繰り返し実行することで、測位装置のアンテナ間の距離の変化を検出するので、他の測位装置が接近しているか否かを通知することができる。また、測位装置は、位置関係を測位するのみならず、無線通信により測位装置間でデータを通信することができる。
【0042】
また、測位部113は、余弦定理に基づいて、内角α、β及びγを算出する。これにより、測位装置は、測距された距離と所定の距離とに基づいて、平面方向における位置関係を測位することができる。
【0043】
また、取得部112は、インパルス信号に基づいて測距された距離a及びcを取得する。これにより、測位装置は、無線通信により測距された距離に基づいて、平面方向における位置関係を測位することができる。
【0044】
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【0045】
例えば、測位装置は、人、移動体、及び、位置が固定された物などにそれぞれ備えられ、上記において説明した人と移動体との位置関係のみならず、人と他の人との位置関係、人と位置が固定された物との位置関係、移動体と他の移動体との位置関係、及び移動体と位置が固定された物との位置関係を測位してもよい。
【0046】
また、例えば、測位装置は、1つの測位装置に複数のアンテナを備えてもよい。例えば、測位装置100−2は、アンテナ140−2及び3を備え、アンテナ140−2及び3を識別してもよい。この場合、移動体200は、測位装置100−2を備えるのみでよい。
【0047】
また、例えば、測位装置は、平面方向のみならず、立体方向の位置関係を測位してもよい。この場合、アンテナの数は、以上に説明した場合と比較して多くてもよい。
【0048】
また、例えば、測位装置が実行する測距の方式は、インパルス信号を用いる超広帯域無線(インパルス型UWB)、RSSI方式、及びRTT方式に限らなくてもよい。なお、インパルス型UWBでは、30[cm]以下の精度で測距が可能である。
【0049】
また、例えば、測位装置は、測距した距離のサンプリング数を増やすことで、誤差を軽減し、測距精度を高めてもよい。また、例えば、測位装置は、測距した距離の移動平均をとることにより、誤差を軽減し、測距精度を高めてもよい。
【0050】
なお、以上に説明した測位装置を実現するためのプログラムを、コンピュータ読み取り可能な記録媒体に記録し、そのプログラムをコンピュータシステムに読み込ませて実行するようにしてもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムが送信された場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリ(RAM)のように、一定時間プログラムを保持しているものも含むものとする。また、上記プログラムは、このプログラムを記憶装置等に格納したコンピュータシステムから、伝送媒体を介して、あるいは、伝送媒体中の伝送波により他のコンピュータシステムに伝送されてもよい。ここで、プログラムを伝送する「伝送媒体」は、インターネット等のネットワーク(通信網)や電話回線等の通信回線(通信線)のように情報を伝送する機能を有する媒体のことをいう。また、上記プログラムは、前述した機能の一部を実現するためのものであってもよい。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であってもよい。
【符号の説明】
【0051】
100…測位装置、110…通信部、111…信号処理部、112…取得部、113…測位部、114…判定部、120…測距部、121…測距処理部、130…高周波回路部、140…アンテナ、200…移動体
【技術分野】
【0001】
本発明は、無線通信により測位する測位装置及び測位方法に関する。
【背景技術】
【0002】
電動車両(EV:Electric Vehicle)、及びプラグイン・ハイブリッド車両(PHV:Plug−in Hybrid Vehicle)は、走行音が小さいため、これら車両の接近を人が気付きにくい状況が起こり得る。そこで、車両の走行状態を想起させる音を、これら車両から発音させることが提案されている(非特許文献1及び2参照)。
【0003】
しかしながら、車両等から発音させても、場合によって音は聞こえないことがある。また、車両等から発音された音は、場合によって騒音となることがある。
【0004】
また、無線通信を用いて測距する測距方式として、受信信号強度(RSSI:Received Signal Strength Indicator)方式、往復遅延時間(RTT:Round Trip Time)方式がある。また、無線通信を用いて電波の到達角度を検出する方式として、AOA(Angle of Arrival)方式が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許出願公開第2004/0235497号明細書
【非特許文献】
【0006】
【非特許文献1】「ハイブリッド車等の静音性に関する対策(報告)」、国土交通省、平成22年1月29日
【非特許文献2】「ハイブリッド車等の静音性に関する対策のガイドライン」、国土交通省、平成22年1月29日
【発明の概要】
【発明が解決しようとする課題】
【0007】
測位装置を携帯した人と測位装置を備えた車両との位置関係を、無線通信を用いて測位するとした場合、RSSI方式、及びRTT方式では、人と車両との距離を単に測距するのみであるため、平面方向における、人と車両との位置関係を得ることはできなかった。
【0008】
また、人と車両との平面方向における位置関係を測位するため、仮にAOA方式を用いて電波の到達角度を検出するとした場合、電波の複数の到達角度を網羅するようにアンテナアレイを配置しなければならない。
【0009】
本発明は、前記の諸点に鑑みてなされたものであり、アンテナアレイを用いることなく、平面方向における位置関係を測位して、測位した位置関係を通知する測位装置及び測位方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明は、上記の課題を解決するためになされたものであり、第1アンテナ、第2アンテナ、及び第3アンテナのうち、いずれかのアンテナと、前記第1アンテナと前記第2アンテナとの第1距離と、前記第1アンテナと前記第3アンテナとの第2距離と、前記第2アンテナと前記第3アンテナとの第3距離とのうち、無線通信により測距された前記第1距離及び前記第2距離を取得する取得部と、前記取得部が取得した前記第1距離及び前記第2距離と、所定の前記第3距離と、に基づいて、前記第1アンテナと前記第2アンテナとを結ぶ第1の線と、前記第1アンテナと前記第3アンテナとを結ぶ第2の線と、前記第2アンテナと前記第3アンテナとを結ぶ第3の線と、から成る三角形の内角のうち、前記第1の線と前記第3の線とが成す第1内角、及び前記第2の線と前記第3の線とが成す第2内角を算出することにより、前記第1アンテナと前記第2アンテナと前記第3アンテナとの位置関係を測位する測位部と、前記第1内角及び前記第2内角の少なくとも一方が鈍角であるか否かを判定し、前記第1内角及び前記第2内角のいずれも鈍角でない場合、前記位置関係を通知する判定部と、を備えることを特徴とする測位装置である。
【0011】
また、本発明は、前記測位部が、余弦定理に基づいて、前記内角を算出することを特徴とする測位装置である。
【0012】
また、本発明は、前記第3距離が、移動体の幅であることを特徴とする測位装置である。
【0013】
また、本発明は、前記判定部が、前記第1内角及び前記第2内角の一方が鈍角であるか否かを判定することにより、前記移動体の移動方向の延長上に前記第1アンテナがあるか否かを判定することを特徴とする測位装置である。
【0014】
また、本発明は、前記取得部が、インパルス信号に基づいて測距された前記第1距離及び前記第2距離を取得することを特徴とする測位装置である。
【0015】
本発明は、第1アンテナ、第2アンテナ、及び第3アンテナのうち、いずれかのアンテナを備える測位装置における測位方法であって、取得部が、前記第1アンテナと前記第2アンテナとの第1距離と、前記第1アンテナと前記第3アンテナとの第2距離と、前記第2アンテナと前記第3アンテナとの第3距離とのうち、無線通信により測距された前記第1距離及び前記第2距離を取得する過程と、測位部が、前記取得部が取得した前記第1距離及び前記第2距離と、所定の前記第3距離と、に基づいて、前記第1アンテナと前記第2アンテナとを結ぶ第1の線と、前記第1アンテナと前記第3アンテナとを結ぶ第2の線と、前記第2アンテナと前記第3アンテナとを結ぶ第3の線と、から成る三角形の内角のうち、前記第1の線と前記第3の線とが成す第1内角、及び前記第2の線と前記第3の線とが成す第2内角を算出することにより、前記第1アンテナと前記第2アンテナと前記第3アンテナとの位置関係を測位する過程と、判定部が、前記第1内角及び前記第2内角の少なくとも一方が鈍角であるか否かを判定し、前記第1内角及び前記第2内角のいずれも鈍角でない場合、前記位置関係を通知する過程と、を有することを特徴とする測位方法である。
【発明の効果】
【0016】
本発明によれば、測位装置は、各測位装置が備える各アンテナを結ぶ線から成る三角形の第1内角及び第2内角を算出し、第1内角及び第2内角のいずれも鈍角でない場合、各アンテナの位置関係を通知する。これにより、測位装置は、アンテナアレイを用いることなく、平面方向における位置関係を測位して、測位した位置関係を通知することができる。
【図面の簡単な説明】
【0017】
【図1】各アンテナの平面方向における位置関係の例を示す図である。
【図2】一実施形態における、測位装置の構成図である。
【発明を実施するための形態】
【0018】
本発明の実施形態について図面を参照して詳細に説明する。図1には、各アンテナの平面方向における位置関係の例が示されている。測位装置100−n(nは、符号1〜3)は、アンテナ140−nを備える。
【0019】
測位装置100−1は、一例として、人に携帯されているものとする。また、測位装置100−2及び100−3は、一例として、移動体(例えば、車両)200の幅方向に、その幅bだけ離して移動体200に備えられているものとする。また、移動体200は、幅方向と直角な方向(図1における矢印方向)に移動しているものとする。
【0020】
図1(A)には、アンテナ140−1の位置が、移動体200の移動方向の延長上にない場合の例が示されている。また、図1(B)には、アンテナ140−1の位置が、移動体200の移動方向の延長上にある場合の例が示されている。
【0021】
測位装置100−1は、アンテナ140−1とアンテナ140−2との距離aを、無線通信により測距する。また、測位装置100−1は、アンテナ140−1とアンテナ140−3との距離cを、無線通信により測距する。ここで、測位装置100−1は、超広帯域無線(UWB:Ultra Wide Band)における変調されたインパルス信号(拡散信号)が、自装置のアンテナと他の測位装置のアンテナとの間を往復した時間に基づいて、自装置のアンテナと他の測位装置のアンテナとの距離を測距する。また、測位装置100−1は、移動体200の幅bを示す情報を、測位装置100−2又は100−3から無線通信により受信する。
【0022】
測位装置100−1は、距離a、b及びcに基づいて、アンテナ140−1とアンテナ140−2とを結ぶ第1の線と、アンテナ140−1とアンテナ140−3とを結ぶ第2の線と、アンテナ140−2とアンテナ140−3とを結ぶ第3の線と、から成る三角形の内角のうち、第1の線と第3の線とが成す内角β、及び第2の線と第3の線とが成す内角γを、余弦定理によって算出する。測位装置100−1は、内角を算出することにより、アンテナ140−1とアンテナ140−2とアンテナ140−3との位置関係を測位する。内角βについて、余弦定理は、式(1)で表される。
【0023】
【数1】
【0024】
ここで、余弦が値0以上(cosβ≧0)であれば、内角βは、0≦β≦(π/2)の範囲にあり、鋭角又は直角である。一方、余弦が負値(cosβ<0)であれば、内角βは、(π/2)<β<πの範囲にあり、鈍角である。内角α及びγについても同様である。
【0025】
測位装置100−1は、算出した内角β及びγの一方が鈍角であるか否かを判定する。内角β及びγのいずれかが鈍角である場合、図1(A)に示すように、アンテナ140−1の位置は、移動体200の移動方向の延長上にない。
【0026】
一方、内角β及びγのいずれも鈍角でない場合、図1(B)に示すように、アンテナ140−1の位置は、移動体200の移動方向の延長上にある。内角β及びγのいずれも鈍角でない場合、測位装置100−1は、アンテナ140−1とアンテナ140−2とアンテナ140−3との位置関係を示す情報、例えば、アンテナ140−1の位置が移動体200の移動方向の延長上にあることを、測位装置100−1を携帯している人に通知する。これにより、測位装置100−1を携帯している人は、移動体200の移動方向の延長上に、測位装置100−1を携帯する自らが位置していることを知ることができる。
【0027】
同様に、内角β及びγのいずれも鈍角でない場合、測位装置100−2及び100−3の少なくとも一方は、アンテナ140−1とアンテナ140−2とアンテナ140−3との位置関係を示す情報、例えば、測位装置100−1を携帯している人の位置が、移動体200の移動方向の延長上にあることを、移動体200を操縦する操縦者に通知する。
【0028】
ここで、測位装置100−2及び100−3は、アンテナ140−1とアンテナ140−2とアンテナ140−3との位置関係を自ら算出してもよいし、各アンテナの位置関係を算出した測位装置100−1から、各アンテナの位置関係を示す情報(データ)を無線通信により受信してもよい。
【0029】
次に、測位装置100の構成を説明する。
図2は、一実施形態における、測位装置の構成図である。測位装置100は、通信部110と、測距部120と、アンテナ140とを備える。ここで、通信部110は、信号処理部111と、高周波回路部130とを備える。また、測距部120は、測距処理部121と、高周波回路部130とを備える。
【0030】
アンテナ140は、超広帯域無線(UWB)における変調されたインパルス信号(拡散信号)を、他の測位装置から無線通信によって受信し、受信したインパルス信号を高周波回路部130に出力する。また、アンテナ140には、変調されたインパルス信号が高周波回路部130から入力される。アンテナ140は、高周波回路部130から入力された変調されたインパルス信号を、他の測位装置に無線通信により送信する。
【0031】
高周波回路部130には、アンテナ140が無線通信により他の測位装置から受信した変調されたインパルス信号が、アンテナ140から入力される。高周波回路部130は、アンテナ140から入力された変調されたインパルス信号を復調して、復調したインパルス信号を信号処理部111及び測距処理部121に出力する。
【0032】
また、高周波回路部130には、信号処理部111及び測距処理部121から、インパルス信号が入力される。高周波回路部130は、信号処理部111及び測距処理部121から入力されたインパルス信号を変調して、アンテナ140に出力する。
【0033】
測距処理部121は、インパルス信号を高周波回路部130に出力する。また、測距処理部121には、高周波回路部130が復調したインパルス信号が、高周波回路部130から入力される。測距処理部121は、例えば、インパルス信号を用いる超広帯域無線(インパルス型UWB)、RSSI方式、又はRTT方式により、自装置のアンテナと他の測位装置のアンテナとの距離を測距する。例えば、インパルス型UWBによる場合、測距処理部121は、高周波回路部130に出力したインパルス信号と、高周波回路部130から入力された復調されたインパルス信号とに基づいて、自装置のアンテナと他の測位装置のアンテナとの間をインパルス信号が往復した時間を算出する。また、測距処理部121は、自装置のアンテナと他の測位装置のアンテナとの間をインパルス信号が往復した時間に基づいて、自装置のアンテナと他の測位装置のアンテナとの距離を測距する。また、測距処理部121は、測位を繰り返し実行することで、測位装置のアンテナ間の距離の変化を検出する。
【0034】
また、測距処理部121は、測距した距離を、測位装置毎に信号処理部111に出力する。ここで、測距処理部121は、自装置を識別する識別情報(自装置ID)をインパルス信号に乗せて、自装置と他の測位装置との間で無線通信により送受信させてもよい。これにより、測距処理部121は、他の測位装置に自装置を識別させることができる。また、測距処理部121は、他の測位装置を識別することができる。
【0035】
信号処理部111は、取得部112と、測位部113と、判定部114とを備える。取得部112は、無線通信により測距された距離を、測距処理部121から測位装置毎に取得して、測位部113に転送する。また、信号処理部111は、インパルス信号にデータを乗せて、他の装置と通信する。このデータは、例えば、無線通信により測距されたアンテナ間の距離を示すデータであってもよいし、各アンテナの位置関係を示す情報(データ)であってもよい。
【0036】
測位部113は、取得部112が転送した測位装置毎の距離と、所定の距離とに基づいて、内角β及びγ(図1を参照)を、余弦定理によって算出する。ここで、所定の距離とは、移動体に備えられたアンテナ間の距離である。例えば、これらのアンテナは、移動体の幅方向に、その幅だけ離して備えられてもよい。なお、この所定の距離を示す情報は、自装置が備える記憶部(不図示)に予め記憶されていてもよいし、測位部113又は信号処理部111が、他の測位装置から無線通信により受信してもよい。
【0037】
また、この所定の距離を示す情報は、移動体(例えば、車両)の種別(例えば、大型、小型)を示す情報であってもよい。この場合、測位部113は、移動体の種別を示す情報に応じて、内角を算出する際に用いる所定の距離を定めてもよい。例えば、測位部113は、他の測位装置から受信した、移動体の種別を示す情報が「車両,大型」を示した場合、所定の距離(車両の幅)を2.5[m]と定めてもよい。
【0038】
測位部113は、各測位装置が備える各アンテナを結ぶ線から成る三角形の内角β及びγ(図1を参照)を、余弦定理によって算出することにより、各アンテナ間の位置関係を測位する。また、測位部113は、算出した内角β及びγを、判定部114に出力する。
【0039】
判定部114は、内角β及びγの一方が鈍角であるか否かを判定し、内角β及びγのいずれも鈍角でない場合、各アンテナの位置関係を示す情報を通知する。例えば、判定部114は、測位装置100−nが備える光源(不図示)を用いて、位置関係を示す情報を通知してもよい。例えば、判定部114は、光源を点滅させることにより、測位装置100−1の位置が移動体200の移動方向の延長上にあることを、測位装置100−1を携帯している人、及び移動体200を操縦する操縦者に通知する。
【0040】
以上のように、測位装置100は、アンテナ140−1、アンテナ140−2、及びアンテナ140−3のうち、いずれかのアンテナと、アンテナ140−1とアンテナ140−2との距離aと、アンテナ140−1とアンテナ140−3との距離cと、アンテナ140−2とアンテナ140−3との距離bとのうち、無線通信により測距された距離a及びcを取得する取得部112と、取得部112が取得した距離a及びcと、所定の距離bと、に基づいて、アンテナ140−1とアンテナ140−2とを結ぶ第1の線と、アンテナ140−1とアンテナ140−3とを結ぶ第2の線と、アンテナ140−2とアンテナ140−3とを結ぶ第3の線と、から成る三角形の内角のうち、第1の線と第3の線とが成す内角β、及び第2の線と第3の線とが成す内角γを算出することにより、アンテナ140−1とアンテナ140−2とアンテナ140−3との位置関係を測位する測位部113と、内角β及びγの一方が鈍角であるか否かを判定し、内角β及びγのいずれも鈍角でない場合、位置関係を通知する判定部114と、を備える。
【0041】
これにより、測位装置は、アンテナアレイを用いることなく、平面方向における位置関係を測位して、測位した位置関係を通知することができる。また、測位装置は、測位を繰り返し実行することで、測位装置のアンテナ間の距離の変化を検出するので、他の測位装置が接近しているか否かを通知することができる。また、測位装置は、位置関係を測位するのみならず、無線通信により測位装置間でデータを通信することができる。
【0042】
また、測位部113は、余弦定理に基づいて、内角α、β及びγを算出する。これにより、測位装置は、測距された距離と所定の距離とに基づいて、平面方向における位置関係を測位することができる。
【0043】
また、取得部112は、インパルス信号に基づいて測距された距離a及びcを取得する。これにより、測位装置は、無線通信により測距された距離に基づいて、平面方向における位置関係を測位することができる。
【0044】
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【0045】
例えば、測位装置は、人、移動体、及び、位置が固定された物などにそれぞれ備えられ、上記において説明した人と移動体との位置関係のみならず、人と他の人との位置関係、人と位置が固定された物との位置関係、移動体と他の移動体との位置関係、及び移動体と位置が固定された物との位置関係を測位してもよい。
【0046】
また、例えば、測位装置は、1つの測位装置に複数のアンテナを備えてもよい。例えば、測位装置100−2は、アンテナ140−2及び3を備え、アンテナ140−2及び3を識別してもよい。この場合、移動体200は、測位装置100−2を備えるのみでよい。
【0047】
また、例えば、測位装置は、平面方向のみならず、立体方向の位置関係を測位してもよい。この場合、アンテナの数は、以上に説明した場合と比較して多くてもよい。
【0048】
また、例えば、測位装置が実行する測距の方式は、インパルス信号を用いる超広帯域無線(インパルス型UWB)、RSSI方式、及びRTT方式に限らなくてもよい。なお、インパルス型UWBでは、30[cm]以下の精度で測距が可能である。
【0049】
また、例えば、測位装置は、測距した距離のサンプリング数を増やすことで、誤差を軽減し、測距精度を高めてもよい。また、例えば、測位装置は、測距した距離の移動平均をとることにより、誤差を軽減し、測距精度を高めてもよい。
【0050】
なお、以上に説明した測位装置を実現するためのプログラムを、コンピュータ読み取り可能な記録媒体に記録し、そのプログラムをコンピュータシステムに読み込ませて実行するようにしてもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムが送信された場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリ(RAM)のように、一定時間プログラムを保持しているものも含むものとする。また、上記プログラムは、このプログラムを記憶装置等に格納したコンピュータシステムから、伝送媒体を介して、あるいは、伝送媒体中の伝送波により他のコンピュータシステムに伝送されてもよい。ここで、プログラムを伝送する「伝送媒体」は、インターネット等のネットワーク(通信網)や電話回線等の通信回線(通信線)のように情報を伝送する機能を有する媒体のことをいう。また、上記プログラムは、前述した機能の一部を実現するためのものであってもよい。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であってもよい。
【符号の説明】
【0051】
100…測位装置、110…通信部、111…信号処理部、112…取得部、113…測位部、114…判定部、120…測距部、121…測距処理部、130…高周波回路部、140…アンテナ、200…移動体
【特許請求の範囲】
【請求項1】
第1アンテナ、第2アンテナ、及び第3アンテナのうち、いずれか1つのアンテナと、
前記第1アンテナと前記第2アンテナとの第1距離と、前記第1アンテナと前記第3アンテナとの第2距離と、前記第2アンテナと前記第3アンテナとの第3距離とのうち、無線通信により測距された前記第1距離及び前記第2距離を取得する取得部と、
前記取得部が取得した前記第1距離及び前記第2距離と、所定の前記第3距離と、に基づいて、前記第1アンテナと前記第2アンテナとを結ぶ第1の線と、前記第1アンテナと前記第3アンテナとを結ぶ第2の線と、前記第2アンテナと前記第3アンテナとを結ぶ第3の線と、から成る三角形の内角のうち、前記第1の線と前記第3の線とが成す第1内角、及び前記第2の線と前記第3の線とが成す第2内角を算出することにより、前記第1アンテナと前記第2アンテナと前記第3アンテナとの位置関係を測位する測位部と、
前記第1内角及び前記第2内角の一方が鈍角であるか否かを判定し、前記第1内角及び前記第2内角のいずれも鈍角でない場合、前記位置関係を通知する判定部と、
を備えることを特徴とする測位装置。
【請求項2】
前記測位部は、余弦定理に基づいて、前記内角を算出することを特徴とする請求項1に記載の測位装置。
【請求項3】
前記第3距離は、移動体の幅であることを特徴とする請求項1又は請求項2に記載の測位装置。
【請求項4】
前記判定部は、前記第1内角及び前記第2内角の一方が鈍角であるか否かを判定することにより、前記移動体の移動方向の延長上に前記第1アンテナがあるか否かを判定することを特徴とする請求項3に記載の測位装置。
【請求項5】
前記取得部は、インパルス信号に基づいて測距された前記第1距離及び前記第2距離を取得することを特徴とする請求項1から請求項4のいずれか1つに記載の測位装置。
【請求項6】
第1アンテナ、第2アンテナ、及び第3アンテナのうち、いずれか1つのアンテナを備える測位装置における測位方法であって、
取得部が、前記第1アンテナと前記第2アンテナとの第1距離と、前記第1アンテナと前記第3アンテナとの第2距離と、前記第2アンテナと前記第3アンテナとの第3距離とのうち、無線通信により測距された前記第1距離及び前記第2距離を取得する過程と、
測位部が、前記取得部が取得した前記第1距離及び前記第2距離と、所定の前記第3距離と、に基づいて、前記第1アンテナと前記第2アンテナとを結ぶ第1の線と、前記第1アンテナと前記第3アンテナとを結ぶ第2の線と、前記第2アンテナと前記第3アンテナとを結ぶ第3の線と、から成る三角形の内角のうち、前記第1の線と前記第3の線とが成す第1内角、及び前記第2の線と前記第3の線とが成す第2内角を算出することにより、前記第1アンテナと前記第2アンテナと前記第3アンテナとの位置関係を測位する過程と、
判定部が、前記第1内角及び前記第2内角の一方が鈍角であるか否かを判定し、前記第1内角及び前記第2内角のいずれも鈍角でない場合、前記位置関係を通知する過程と、
を有することを特徴とする測位方法。
【請求項1】
第1アンテナ、第2アンテナ、及び第3アンテナのうち、いずれか1つのアンテナと、
前記第1アンテナと前記第2アンテナとの第1距離と、前記第1アンテナと前記第3アンテナとの第2距離と、前記第2アンテナと前記第3アンテナとの第3距離とのうち、無線通信により測距された前記第1距離及び前記第2距離を取得する取得部と、
前記取得部が取得した前記第1距離及び前記第2距離と、所定の前記第3距離と、に基づいて、前記第1アンテナと前記第2アンテナとを結ぶ第1の線と、前記第1アンテナと前記第3アンテナとを結ぶ第2の線と、前記第2アンテナと前記第3アンテナとを結ぶ第3の線と、から成る三角形の内角のうち、前記第1の線と前記第3の線とが成す第1内角、及び前記第2の線と前記第3の線とが成す第2内角を算出することにより、前記第1アンテナと前記第2アンテナと前記第3アンテナとの位置関係を測位する測位部と、
前記第1内角及び前記第2内角の一方が鈍角であるか否かを判定し、前記第1内角及び前記第2内角のいずれも鈍角でない場合、前記位置関係を通知する判定部と、
を備えることを特徴とする測位装置。
【請求項2】
前記測位部は、余弦定理に基づいて、前記内角を算出することを特徴とする請求項1に記載の測位装置。
【請求項3】
前記第3距離は、移動体の幅であることを特徴とする請求項1又は請求項2に記載の測位装置。
【請求項4】
前記判定部は、前記第1内角及び前記第2内角の一方が鈍角であるか否かを判定することにより、前記移動体の移動方向の延長上に前記第1アンテナがあるか否かを判定することを特徴とする請求項3に記載の測位装置。
【請求項5】
前記取得部は、インパルス信号に基づいて測距された前記第1距離及び前記第2距離を取得することを特徴とする請求項1から請求項4のいずれか1つに記載の測位装置。
【請求項6】
第1アンテナ、第2アンテナ、及び第3アンテナのうち、いずれか1つのアンテナを備える測位装置における測位方法であって、
取得部が、前記第1アンテナと前記第2アンテナとの第1距離と、前記第1アンテナと前記第3アンテナとの第2距離と、前記第2アンテナと前記第3アンテナとの第3距離とのうち、無線通信により測距された前記第1距離及び前記第2距離を取得する過程と、
測位部が、前記取得部が取得した前記第1距離及び前記第2距離と、所定の前記第3距離と、に基づいて、前記第1アンテナと前記第2アンテナとを結ぶ第1の線と、前記第1アンテナと前記第3アンテナとを結ぶ第2の線と、前記第2アンテナと前記第3アンテナとを結ぶ第3の線と、から成る三角形の内角のうち、前記第1の線と前記第3の線とが成す第1内角、及び前記第2の線と前記第3の線とが成す第2内角を算出することにより、前記第1アンテナと前記第2アンテナと前記第3アンテナとの位置関係を測位する過程と、
判定部が、前記第1内角及び前記第2内角の一方が鈍角であるか否かを判定し、前記第1内角及び前記第2内角のいずれも鈍角でない場合、前記位置関係を通知する過程と、
を有することを特徴とする測位方法。
【図1】

【図2】
【図2】
【公開番号】特開2012−2584(P2012−2584A)
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願番号】特願2010−136161(P2010−136161)
【出願日】平成22年6月15日(2010.6.15)
【出願人】(397065136)株式会社横須賀テレコムリサーチパーク (28)
【Fターム(参考)】
【公開日】平成24年1月5日(2012.1.5)
【国際特許分類】
【出願日】平成22年6月15日(2010.6.15)
【出願人】(397065136)株式会社横須賀テレコムリサーチパーク (28)
【Fターム(参考)】
[ Back to top ]