
測位装置及び測位方法
【課題】測位衛星による衛星信号を受信する受信装置(例えばGPS受信機)の設置姿勢が変化するような環境下においても適切に衛星を捕捉し、精度の高い測位を行う測位装置を提供する。
【解決手段】複数の測位衛星から送信される衛星信号を受信するGPSモジュール1と、GPSモジュール1の方位角情報と仰角情報とを取得する姿勢センサ2と、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて、複数の測位衛星の中から測位演算に利用する測位衛星を選択する衛星選択部31と、衛星選択部31により選択された測位衛星から送信された衛星信号に基づいて測位演算を行い、GPSモジュール1の位置を算出する位置算出部32とを備える。
【解決手段】複数の測位衛星から送信される衛星信号を受信するGPSモジュール1と、GPSモジュール1の方位角情報と仰角情報とを取得する姿勢センサ2と、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて、複数の測位衛星の中から測位演算に利用する測位衛星を選択する衛星選択部31と、衛星選択部31により選択された測位衛星から送信された衛星信号に基づいて測位演算を行い、GPSモジュール1の位置を算出する位置算出部32とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、GPS(Global Positioning system)衛星等の測位衛星により送信される信号を受信することにより測位を行う測位装置に関する。
【背景技術】
【0002】
従来から、GPS受信装置等を利用する測位装置は、複数のGPS衛星により送信される衛星信号を受信し、このGPS衛星信号に含まれる各種情報に基づいて、GPS受信装置が設置された位置を計測する。しかしながら、低仰角衛星から受信した衛星情報は、マルチパスの影響を受けやすいという特徴を有する。したがって、低仰角のGPS衛星の情報を用いて測位演算を行った場合には、マルチパスにより位置精度に対する悪影響が生じる可能性がある。
【0003】
そこで、従来技術に係る測位装置の中には、低仰角衛星からの電波を利用しないように仰角マスクを行うことで、測位誤差を低減する工夫がなされている測位装置が存在する。このような測位装置は、受信した衛星信号に基づいて、例えば衛星のコード、キャリア、衛星軌道及び衛星信号受信レベル等の情報を取得し、取得した情報から計算される衛星仰角の情報と予め記憶している仰角マスクの情報とに基づいて、低仰角衛星による情報の規制を行う。
【0004】
このような仰角マスクの設定がされた測位装置は、低仰角衛星による情報が規制された衛星情報に基づいて測位演算を行うことで、仰角マスクに対応する分のマルチパスの影響を抑制した位置情報を生成・出力するので、位置精度の低下を防止することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−24617号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した従来の測位装置は、測位衛星により送信される衛星信号を受信する受信装置(例えばGPS受信機)の設置姿勢が変化した場合に位置データの精度が劣化するという問題が生じる。
【0007】
1例として、災害救助等に従事する者が自己の位置を他者に知らせるため、自らの身体にGPS受信機を装着する場合が考えられる。このような場合に、GPS受信機は通常、上空の測位衛星からの衛星信号を容易に受信できるように頭や肩等の高い位置に装着されると考えられる。
【0008】
しかしながら、GPS受信機を装着した者は、必ずしも常に通常の姿勢で直立しているわけではなく、様々な作業を行う中で姿勢が常に変化するため、それに伴ってGPS受信機の方向や角度も変化してしまうことが考えられる。GPS受信機は、基本的に平らな場所に通常の角度で設置されることを前提として衛星信号の捕捉や仰角マスクの処理を行うため、上述したように姿勢が常に変化する環境下においては、仰角マスクを設定しても、マルチパスの影響を受けてしまい、測位による位置精度低下の問題や測位自体が困難になるといった問題を生ずる。
【0009】
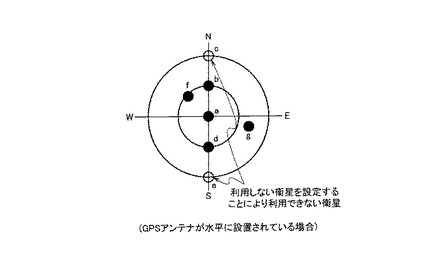
図6は、従来の測位装置でアンテナが水平状態の場合の衛星捕捉状態を示す図である。アンテナ(測位装置)は、地上に水平に設置され、図6の中心部分に存在している。また、7つの衛星a〜gは、測位装置により衛星信号を受信することができる衛星である。図6の見方としては、例えばアンテナの天頂方向(真上)には衛星aが存在し、アンテナに対して北の方向の空には衛星b、cが存在していることになる。
【0010】
この場合において、アンテナに対して北の方向の空に存在する衛星cと南の方向の空に存在する衛星eとは、アンテナから見て地平線に近い低仰角の位置に存在する。したがって、アンテナが衛星c,eから受信した衛星情報は、マルチパスの影響を受けやすいと考えられる。そこで、従来の測位装置は、予め設定されたしきい値に基づく仰角マスクを使用し、衛星c,eの捕捉制限を行うことで低仰角衛星信号による情報を規制し、マルチパスの影響を抑制してより正確な測位演算を行うことができる。
【0011】
次に、アンテナを北に90度傾けた場合について考える。図7は、従来の測位装置でアンテナが北に90度傾いている場合の衛星捕捉状態を示す図である。各測位衛星の位置は、図6に示す場合と変わらないものとする。
【0012】
まず、アンテナが北に90度傾いているため、この場合における測位装置は、物理的に南側に存在する測位衛星からの衛星信号を捕捉することができない。したがって、測位装置は、衛星d,eからの信号を捕捉することができず、その他の測位衛星からの衛星信号を用いて測位演算を行う必要がある。
【0013】
しかしながら、この従来の測位装置は、アンテナが90度傾いていることを考慮に入れていないため、本来受信できない衛星d,gもマルチパスにより受信できてしまう場合があり、位置精度が低下することが考えられる。
【0014】
本発明は上述した従来技術の問題点を解決するもので、測位衛星による衛星信号を受信する受信装置(例えばGPS受信機)の設置姿勢が変化するような環境下においても適切に衛星を捕捉し、精度の高い測位を行う測位装置を提供することを課題とする。
【課題を解決するための手段】
【0015】
実施形態の測位装置は、上記課題を解決するために、複数の測位衛星から送信される衛星信号を受信する受信機と、前記受信機の方位角情報と仰角情報とを取得する姿勢センサと、前記受信機により受信された衛星信号と前記姿勢センサにより取得された方位角情報と仰角情報とに基づいて、前記複数の測位衛星の中から測位演算に利用する測位衛星を選択する選択部と、前記選択部により選択された測位衛星から送信された衛星信号に基づいて測位演算を行い、前記受信機の位置を算出する位置算出部とを備えることを特徴とする。
【図面の簡単な説明】
【0016】
【図1】実施例1の形態の測位装置の構成を示すブロック図である。
【図2】実施例1の形態の測位装置を利用者が身体に装着した場合のイメージを示す図である。
【図3】実施例1の形態の測位装置の動作を示すフローチャート図である。
【図4】実施例1の形態の測位装置でアンテナが水平状態の場合の衛星捕捉状態を示す図である。
【図5】実施例1の形態の測位装置でアンテナが北に90度傾いている場合の衛星捕捉状態を示す図である。
【図6】従来の形態の測位装置でアンテナが水平状態の場合の衛星捕捉状態を示す図である。
【図7】従来の形態の測位装置でアンテナが北に90度傾いている場合の衛星捕捉状態を示す図である。
【発明を実施するための形態】
【0017】
以下、測位装置及び測位方法の実施の形態について図面を参照して詳細に説明する。
【実施例1】
【0018】
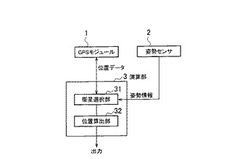
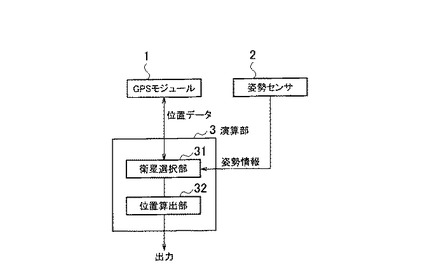
以下、実施例について図面を参照しながら説明する。図1は、実施例1の測位装置の構成を示すブロック図である。本実施例の測位装置は、GPSモジュール1、姿勢センサ2、及び演算部3により構成される。また、演算部3は、衛星選択部31と位置算出部32とからなる。
【0019】
GPSモジュール1は、受信機に対応し、複数の測位衛星から送信される衛星信号を受信する。本実施例におけるGPSモジュール1は、測位衛星として複数のGPS(Global Positioning System)衛星から送られてくる測位用の衛星信号を受信するものとし、受信した衛星信号を位置データとして演算部3に出力する。
【0020】
姿勢センサ2は、GPSモジュール1の方位角情報と仰角情報とを取得する。具体的には、姿勢センサ11は、例えば磁気方位センサと傾斜計との組み合わせであり、地磁気を利用してGPSモジュール1が現在向いている絶対的な方位角の情報を取得するとともに、重力方向を基準にしてGPSモジュール1の傾角を測定し、取得した方位角情報と仰角情報とを姿勢情報として演算部3に出力する。したがって、姿勢センサ2は、通常はGPSモジュール1と一体的に構成されている。
【0021】
なお、ここでいう方位角及び仰角とは、特にGPSモジュール1が有する衛星信号を受信するためのアンテナの角度を指すものとし、例えば方位角として北を向いているとの方位角情報が得られた場合には、北方向に存在する測位衛星からの衛星信号を受信しやすい向きであることを示す。
【0022】
演算部3は、例えばパソコン等であるが、後述する衛星選択部31及び位置算出部32としての演算処理を行うことができればどのようなものでもよく、当該測位装置を各使用者が手軽に携帯できるように小型化されたチップ等を使用することが考えられる。
【0023】
衛星選択部31は、本発明の選択部に対応し、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて、複数の測位衛星の中から測位演算に利用する測位衛星を選択する。具体的な測位衛星選択の方法については後述する。
【0024】
位置算出部32は、衛星選択部31により選択された測位衛星から送信された衛星信号に基づいて測位演算を行い、GPSモジュール1の位置を算出し、例えば緯度、経度、高さ等の数値を位置情報として出力する。位置算出部32により出力された位置情報は、様々な利用方法が考えられるが、例えばネットワーク等を介して他の利用者等に送信してもよいし、測位演算装置が図示されないディスプレイ等の表示装置を備えている場合には、周辺地図にGPSモジュール1の現在位置を重ね合わせて表示するために利用してもよい。
【0025】
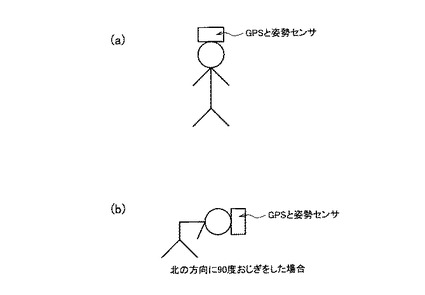
次に、上述のように構成された本実施の形態の作用を説明する。図2は、本実施例の測位装置を利用者が身体に装着した場合のイメージを示す図であり、例えば災害救助等に従事する者がヘルメットにGPSモジュール1と姿勢センサ2を装着するような場合を想定している。なお、演算部3は、GPSモジュール1と姿勢センサ2とを装着した者自身が所持していてもよいし、無線のネットワーク等を介して他者が所持していてもよい。
【0026】
図2に示すように、GPSモジュール1と姿勢センサ2とを装着した者が通常の姿勢で直立しているときは図2(a)に示すような状態となり、例えば北の方向に90度おじぎをした場合には図2(b)に示すような状態となる。それぞれの場合についての処理について、以下説明する。
【0027】
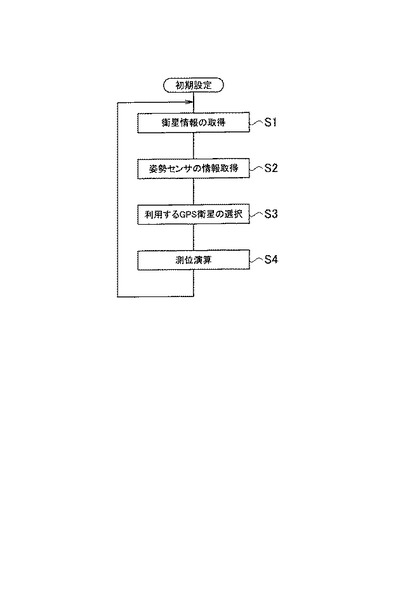
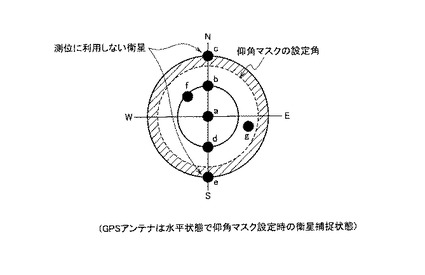
図3は、本実施例の測位装置の動作を示すフローチャート図である。また、図4は、本実施例の測位装置でアンテナが水平状態の場合の衛星捕捉状態を示す図である。最初に、図2(a)のようにGPSモジュール1と姿勢センサ2とを装着した者が通常の姿勢で直立し、アンテナが水平状態の場合について図3,4を用いて説明する。
【0028】
図3に示すように、測位装置は、予め仰角マスクのしきい値その他の初期設定を行った後、実際の測位動作を開始する。まず測位装置は、衛星情報の取得を行う(ステップS1)。具体的には、GPSモジュール1は、複数の測位衛星から送信される衛星信号を受信し(本発明の受信ステップに対応)、受信した衛星信号を位置データとして演算部3に出力する。図4に示すように、衛星a〜gを捕捉することができるので、GPSモジュール1は、複数の測位衛星a〜gの各々による衛星信号を受信し、位置データとして演算部3に出力する。
【0029】
また、測位装置は、姿勢センサ2の情報を取得する(ステップS2)。具体的には、姿勢センサ2は、GPSモジュール1(アンテナ)の方位角情報と仰角情報とを取得し(本発明の姿勢情報取得ステップに対応)、取得した方位角情報と仰角情報とを姿勢情報として演算部3に出力する。ただし、上述したようにアンテナが水平状態であるため、姿勢センサ2は、アンテナがいずれの方角に傾いておらず、真っ直ぐ上空に向いていることを検知して姿勢情報として演算部3に出力する。
【0030】
なお、図3のフローチャートにおいては、ステップS1で衛星情報を取得した後にステップS2で姿勢センサ2の情報を取得しているが、GPSモジュール1と姿勢センサ2とは並列に動作しているため、いずれの情報取得が先でもよいし同時でもよい。
【0031】
次に、測位装置は、利用するGPS衛星の選択を行う(ステップS3)。具体的には、演算部3内の衛星選択部31は、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて、複数の測位衛星の中から測位演算に利用する測位衛星を選択する(本発明の選択ステップに対応)。
【0032】
選択するに際し、衛星選択部31は、姿勢センサ2により取得された方位角情報と仰角情報とに基づいてGPSモジュール1による捕捉可能範囲を決定し、GPSモジュール1により受信された衛星信号に基づいて導き出される測位衛星の方位角が当該捕捉範囲内に入る場合に、当該測位衛星を選択する。
【0033】
例えば、衛星選択部31は、アンテナが北に傾いていることを方位角情報として得た場合には、捕捉可能範囲は北を中心とした範囲となり、南側に位置する衛星は捕捉可能範囲外ということになる。また、衛星選択部31は、仰角情報に基づいて捕捉可能範囲を定めることにより適切な衛星選択を行うことができる。例えば、アンテナが北の方向に傾いている場合であってもその角度がわずかであれば、衛星選択部31は、ある程度南の方角についても捕捉可能範囲に入れることができる。一方、アンテナが北の方向に深く傾いている場合には、衛星選択部31は、南側の衛星については捕捉不可能とし、捕捉可能範囲が北を中心とする狭い範囲に限られることになる。
【0034】
今回は、GPSアンテナが水平であると仮定しているため、衛星選択部31は、アンテナがいずれの方角に傾いておらず、真っ直ぐ上空に向いていることを姿勢情報として取得しており、全方位について捕捉可能範囲とする。
【0035】
また、衛星選択部31は、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて複数の測位衛星の各々の仰角を算出し、予め設定された基準仰角以上の仰角を有する測位衛星を選択する。
【0036】
すなわち、衛星選択部31は、アンテナがいずれの方角に傾いておらず、真っ直ぐ上空に向いているとの姿勢情報に基づいて、GPSモジュール1が受信した衛星信号の発信源である測位衛星a〜gの各々の仰角(アンテナの位置する地表からみた各衛星の仰角)を算出し、低仰角である測位衛星c,eについては利用しないとの判断を行うため、基準仰角以上の仰角を有するその他の測位衛星a,b,d,f,gを選択する。
【0037】
最後に、測位衛星は測位演算を行う(ステップS4)。具体的には、位置算出部32は、衛星選択部31により選択された測位衛星a,b,d,f,gから送信された衛星信号に基づいて測位演算を行い、GPSモジュール1の位置を算出し(本発明の位置算出ステップに対応)、例えば緯度、経度、高さ等の数値を位置情報として出力する。
【0038】
その後、ステップS1に戻って演算を繰り返すことにより、測位装置は、常にGPSモジュール1の現在位置を算出することができ、測位装置を身体に装着した者が移動した場合においても即座に位置を把握することができる。
【0039】
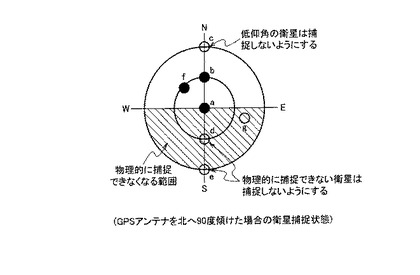
図5は、本実施例の測位装置でアンテナが北に90度傾いている場合の衛星捕捉状態を示す図である。以下、図2(b)のようにGPSモジュール1と姿勢センサ2とを装着した者が北の方向に90度の角度でおじぎをし、それに伴ってアンテナが北に90度傾いた場合について図3,5を用いて説明する。
【0040】
図4を用いて説明した場合と同様に初期設定を行った後、測位装置は、衛星情報の取得を行う(ステップS1)。具体的には、GPSモジュール1は、複数の測位衛星a,b,c,fの各々による衛星信号を受信し、位置データとして演算部3に出力する。
【0041】
なお、アンテナが北に90度傾いているため、測位装置は、南側に位置する測位衛星d,e,gによる衛星信号については物理的に捕捉することができない。ただし、マルチパス等の影響により測位衛星d,e,gによる衛星信号をたまたま捕捉してしまう場合もあるので、その場合にはGPSモジュール1は、捕捉した全ての衛星信号について位置データとして出力する。
【0042】
また、測位装置は、姿勢センサ2の情報を取得する(ステップS2)。具体的には、姿勢センサ2は、GPSモジュール1(アンテナ)の方位角情報(北を向いている旨の情報)と仰角情報(90度傾いている旨の情報)とを取得し、取得した方位角情報と仰角情報とを姿勢情報として演算部3に出力する。
【0043】
次に、測位装置は、利用するGPS衛星の選択を行う(ステップS3)。具体的には、演算部3内の衛星選択部31は、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて、複数の測位衛星の中から測位演算に利用する測位衛星を選択する。
【0044】
選択するに際し、衛星選択部31は、姿勢センサ2により取得された方位角情報と仰角情報とに基づいてGPSモジュール1による捕捉可能範囲を決定し、GPSモジュール1により受信された衛星信号に基づいて導き出される測位衛星の方位角が当該捕捉範囲内に入る場合に、当該測位衛星を選択する。
【0045】
ここで、衛星選択部31は、アンテナが北に90度傾いているため、北側のみを捕捉可能範囲とし、南側の物理的に捕捉出来ない範囲については例え衛星信号を捕捉できたとしてもマルチパスの影響が大きいと考えられるため捕捉を行わない。
【0046】
したがって、衛星選択部31は、図5に示すように捕捉範囲内に入る測位衛星a,b,c,fのみを選択し、GPSモジュール1が衛星信号をとらえていたとしても測位衛星d,e,gについては選択しない。
【0047】
また、衛星選択部31は、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて複数の測位衛星の各々の仰角を算出し、予め設定された基準仰角以上の仰角を有する測位衛星を選択する。
【0048】
すなわち、衛星選択部31は、アンテナが北の方角に90度傾いているとの姿勢情報に基づいて、GPSモジュール1が受信した衛星信号の発信源である測位衛星a,b,c,fの各々の仰角(アンテナの位置する地表からみた各衛星の仰角)を算出し、低仰角である測位衛星cについては利用しないとの判断を行うため、基準仰角以上の仰角を有するその他の測位衛星a,b,fを選択する。
【0049】
図7で説明した従来の測位装置と異なり、本実施例の測位装置は、姿勢センサ2を備えているため、アンテナがどの方向にどの程度傾いていたとしても各測位衛星の重力方向に対する絶対的な仰角を算出することができ、アンテナが位置する地表に対して低仰角であるか否かを衛星毎に適切に判断することができる。
【0050】
最後に、測位衛星は測位演算を行う(ステップS4)。具体的には、位置算出部32は、衛星選択部31により選択された測位衛星a,b,fから送信された衛星信号に基づいて測位演算を行い、GPSモジュール1の位置を算出し、例えば緯度、経度、高さ等の数値を位置情報として出力する。
【0051】
その後、図4で説明した場合と同様に、ステップS1に戻って演算を繰り返すことにより、測位装置は、常にGPSモジュール1の現在位置を算出することができ、測位装置を身体に装着した者が移動した場合においても即座に位置を把握することができる。
【0052】
なお、災害救助等のような場面において複数の隊員が測位装置を使用し、隊長が各隊員の位置を把握する必要がある場合が考えられる。その場合には、各隊員は、GPSモジュール1、姿勢センサ2、及び演算部3が一体的に構成された測位装置を例えばヘルメット等に装着する。隊長は、無線のネットワーク等を介して各隊員が有する演算部3から送信されてくる情報をディスプレイ上に地図とともに表示し、各隊員の現在位置を容易に把握することができる。
【0053】
変形例として、演算部3に該当する構成を隊長が所持し、各隊員は、GPSモジュール1と姿勢センサ2のみを装着する構成も考えられる。この場合には、隊長が所持する演算部3は、各隊員が所持するGPSモジュール1と姿勢センサ2とから送られてくる位置データ及び姿勢情報に基づいて、各隊員の現在位置を算出し、ディスプレイ等に表示する。現在位置の表示の仕方として、隊長自身もGPSモジュール1と姿勢センサ2とを所持し、ディスプレイ上に常に隊長の位置を中心とする地図を表示するようにし、その地図上に各隊員の位置を光点で表示するような方法も考えられる。
【0054】
上述のとおり、本発明の実施例1の形態に係る測位装置及び測位方法によれば、測位衛星による衛星信号を受信するGPSモジュール1の設置姿勢が変化するような環境下においても適切に衛星を捕捉し、精度の高い測位を行うことができる。
【0055】
特に、衛星選択部31は、姿勢センサ2により取得された方位角情報と仰角情報とに基づいてGPSモジュール1による捕捉可能範囲を決定し、GPSモジュール1により受信された衛星信号に基づいて導き出される測位衛星の方位角が当該捕捉範囲内に入る場合に、当該測位衛星を選択するので、本来、物理的に捕捉できないはずの測位衛星から送られてきた衛星信号を捕捉した場合に、適切にその衛星信号による情報を除外し、マルチパス等の影響による測位精度の低下を防止することができる。
【0056】
また、衛星選択部31は、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて複数の測位衛星の各々の仰角を算出し、予め設定された基準仰角以上の仰角を有する測位衛星を選択するので、GPSモジュール1が有するアンテナがどのような姿勢であったとしても、各測位衛星の重力方向に対する絶対的な仰角を正確に算出し、マルチパスの影響が大きいと思われる低仰角の衛星を確実にマスクして測位精度を高めることができる。
【0057】
いくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0058】
1 GPSモジュール
2 姿勢センサ
3 演算部
31 衛星選択部
32 位置算出部
a〜g 衛星
【技術分野】
【0001】
本発明の実施形態は、GPS(Global Positioning system)衛星等の測位衛星により送信される信号を受信することにより測位を行う測位装置に関する。
【背景技術】
【0002】
従来から、GPS受信装置等を利用する測位装置は、複数のGPS衛星により送信される衛星信号を受信し、このGPS衛星信号に含まれる各種情報に基づいて、GPS受信装置が設置された位置を計測する。しかしながら、低仰角衛星から受信した衛星情報は、マルチパスの影響を受けやすいという特徴を有する。したがって、低仰角のGPS衛星の情報を用いて測位演算を行った場合には、マルチパスにより位置精度に対する悪影響が生じる可能性がある。
【0003】
そこで、従来技術に係る測位装置の中には、低仰角衛星からの電波を利用しないように仰角マスクを行うことで、測位誤差を低減する工夫がなされている測位装置が存在する。このような測位装置は、受信した衛星信号に基づいて、例えば衛星のコード、キャリア、衛星軌道及び衛星信号受信レベル等の情報を取得し、取得した情報から計算される衛星仰角の情報と予め記憶している仰角マスクの情報とに基づいて、低仰角衛星による情報の規制を行う。
【0004】
このような仰角マスクの設定がされた測位装置は、低仰角衛星による情報が規制された衛星情報に基づいて測位演算を行うことで、仰角マスクに対応する分のマルチパスの影響を抑制した位置情報を生成・出力するので、位置精度の低下を防止することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−24617号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述した従来の測位装置は、測位衛星により送信される衛星信号を受信する受信装置(例えばGPS受信機)の設置姿勢が変化した場合に位置データの精度が劣化するという問題が生じる。
【0007】
1例として、災害救助等に従事する者が自己の位置を他者に知らせるため、自らの身体にGPS受信機を装着する場合が考えられる。このような場合に、GPS受信機は通常、上空の測位衛星からの衛星信号を容易に受信できるように頭や肩等の高い位置に装着されると考えられる。
【0008】
しかしながら、GPS受信機を装着した者は、必ずしも常に通常の姿勢で直立しているわけではなく、様々な作業を行う中で姿勢が常に変化するため、それに伴ってGPS受信機の方向や角度も変化してしまうことが考えられる。GPS受信機は、基本的に平らな場所に通常の角度で設置されることを前提として衛星信号の捕捉や仰角マスクの処理を行うため、上述したように姿勢が常に変化する環境下においては、仰角マスクを設定しても、マルチパスの影響を受けてしまい、測位による位置精度低下の問題や測位自体が困難になるといった問題を生ずる。
【0009】
図6は、従来の測位装置でアンテナが水平状態の場合の衛星捕捉状態を示す図である。アンテナ(測位装置)は、地上に水平に設置され、図6の中心部分に存在している。また、7つの衛星a〜gは、測位装置により衛星信号を受信することができる衛星である。図6の見方としては、例えばアンテナの天頂方向(真上)には衛星aが存在し、アンテナに対して北の方向の空には衛星b、cが存在していることになる。
【0010】
この場合において、アンテナに対して北の方向の空に存在する衛星cと南の方向の空に存在する衛星eとは、アンテナから見て地平線に近い低仰角の位置に存在する。したがって、アンテナが衛星c,eから受信した衛星情報は、マルチパスの影響を受けやすいと考えられる。そこで、従来の測位装置は、予め設定されたしきい値に基づく仰角マスクを使用し、衛星c,eの捕捉制限を行うことで低仰角衛星信号による情報を規制し、マルチパスの影響を抑制してより正確な測位演算を行うことができる。
【0011】
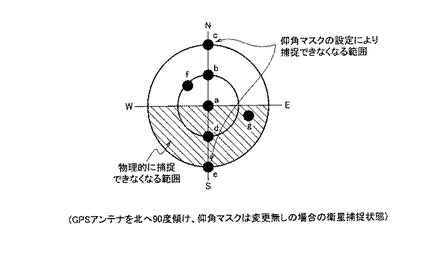
次に、アンテナを北に90度傾けた場合について考える。図7は、従来の測位装置でアンテナが北に90度傾いている場合の衛星捕捉状態を示す図である。各測位衛星の位置は、図6に示す場合と変わらないものとする。
【0012】
まず、アンテナが北に90度傾いているため、この場合における測位装置は、物理的に南側に存在する測位衛星からの衛星信号を捕捉することができない。したがって、測位装置は、衛星d,eからの信号を捕捉することができず、その他の測位衛星からの衛星信号を用いて測位演算を行う必要がある。
【0013】
しかしながら、この従来の測位装置は、アンテナが90度傾いていることを考慮に入れていないため、本来受信できない衛星d,gもマルチパスにより受信できてしまう場合があり、位置精度が低下することが考えられる。
【0014】
本発明は上述した従来技術の問題点を解決するもので、測位衛星による衛星信号を受信する受信装置(例えばGPS受信機)の設置姿勢が変化するような環境下においても適切に衛星を捕捉し、精度の高い測位を行う測位装置を提供することを課題とする。
【課題を解決するための手段】
【0015】
実施形態の測位装置は、上記課題を解決するために、複数の測位衛星から送信される衛星信号を受信する受信機と、前記受信機の方位角情報と仰角情報とを取得する姿勢センサと、前記受信機により受信された衛星信号と前記姿勢センサにより取得された方位角情報と仰角情報とに基づいて、前記複数の測位衛星の中から測位演算に利用する測位衛星を選択する選択部と、前記選択部により選択された測位衛星から送信された衛星信号に基づいて測位演算を行い、前記受信機の位置を算出する位置算出部とを備えることを特徴とする。
【図面の簡単な説明】
【0016】
【図1】実施例1の形態の測位装置の構成を示すブロック図である。
【図2】実施例1の形態の測位装置を利用者が身体に装着した場合のイメージを示す図である。
【図3】実施例1の形態の測位装置の動作を示すフローチャート図である。
【図4】実施例1の形態の測位装置でアンテナが水平状態の場合の衛星捕捉状態を示す図である。
【図5】実施例1の形態の測位装置でアンテナが北に90度傾いている場合の衛星捕捉状態を示す図である。
【図6】従来の形態の測位装置でアンテナが水平状態の場合の衛星捕捉状態を示す図である。
【図7】従来の形態の測位装置でアンテナが北に90度傾いている場合の衛星捕捉状態を示す図である。
【発明を実施するための形態】
【0017】
以下、測位装置及び測位方法の実施の形態について図面を参照して詳細に説明する。
【実施例1】
【0018】
以下、実施例について図面を参照しながら説明する。図1は、実施例1の測位装置の構成を示すブロック図である。本実施例の測位装置は、GPSモジュール1、姿勢センサ2、及び演算部3により構成される。また、演算部3は、衛星選択部31と位置算出部32とからなる。
【0019】
GPSモジュール1は、受信機に対応し、複数の測位衛星から送信される衛星信号を受信する。本実施例におけるGPSモジュール1は、測位衛星として複数のGPS(Global Positioning System)衛星から送られてくる測位用の衛星信号を受信するものとし、受信した衛星信号を位置データとして演算部3に出力する。
【0020】
姿勢センサ2は、GPSモジュール1の方位角情報と仰角情報とを取得する。具体的には、姿勢センサ11は、例えば磁気方位センサと傾斜計との組み合わせであり、地磁気を利用してGPSモジュール1が現在向いている絶対的な方位角の情報を取得するとともに、重力方向を基準にしてGPSモジュール1の傾角を測定し、取得した方位角情報と仰角情報とを姿勢情報として演算部3に出力する。したがって、姿勢センサ2は、通常はGPSモジュール1と一体的に構成されている。
【0021】
なお、ここでいう方位角及び仰角とは、特にGPSモジュール1が有する衛星信号を受信するためのアンテナの角度を指すものとし、例えば方位角として北を向いているとの方位角情報が得られた場合には、北方向に存在する測位衛星からの衛星信号を受信しやすい向きであることを示す。
【0022】
演算部3は、例えばパソコン等であるが、後述する衛星選択部31及び位置算出部32としての演算処理を行うことができればどのようなものでもよく、当該測位装置を各使用者が手軽に携帯できるように小型化されたチップ等を使用することが考えられる。
【0023】
衛星選択部31は、本発明の選択部に対応し、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて、複数の測位衛星の中から測位演算に利用する測位衛星を選択する。具体的な測位衛星選択の方法については後述する。
【0024】
位置算出部32は、衛星選択部31により選択された測位衛星から送信された衛星信号に基づいて測位演算を行い、GPSモジュール1の位置を算出し、例えば緯度、経度、高さ等の数値を位置情報として出力する。位置算出部32により出力された位置情報は、様々な利用方法が考えられるが、例えばネットワーク等を介して他の利用者等に送信してもよいし、測位演算装置が図示されないディスプレイ等の表示装置を備えている場合には、周辺地図にGPSモジュール1の現在位置を重ね合わせて表示するために利用してもよい。
【0025】
次に、上述のように構成された本実施の形態の作用を説明する。図2は、本実施例の測位装置を利用者が身体に装着した場合のイメージを示す図であり、例えば災害救助等に従事する者がヘルメットにGPSモジュール1と姿勢センサ2を装着するような場合を想定している。なお、演算部3は、GPSモジュール1と姿勢センサ2とを装着した者自身が所持していてもよいし、無線のネットワーク等を介して他者が所持していてもよい。
【0026】
図2に示すように、GPSモジュール1と姿勢センサ2とを装着した者が通常の姿勢で直立しているときは図2(a)に示すような状態となり、例えば北の方向に90度おじぎをした場合には図2(b)に示すような状態となる。それぞれの場合についての処理について、以下説明する。
【0027】
図3は、本実施例の測位装置の動作を示すフローチャート図である。また、図4は、本実施例の測位装置でアンテナが水平状態の場合の衛星捕捉状態を示す図である。最初に、図2(a)のようにGPSモジュール1と姿勢センサ2とを装着した者が通常の姿勢で直立し、アンテナが水平状態の場合について図3,4を用いて説明する。
【0028】
図3に示すように、測位装置は、予め仰角マスクのしきい値その他の初期設定を行った後、実際の測位動作を開始する。まず測位装置は、衛星情報の取得を行う(ステップS1)。具体的には、GPSモジュール1は、複数の測位衛星から送信される衛星信号を受信し(本発明の受信ステップに対応)、受信した衛星信号を位置データとして演算部3に出力する。図4に示すように、衛星a〜gを捕捉することができるので、GPSモジュール1は、複数の測位衛星a〜gの各々による衛星信号を受信し、位置データとして演算部3に出力する。
【0029】
また、測位装置は、姿勢センサ2の情報を取得する(ステップS2)。具体的には、姿勢センサ2は、GPSモジュール1(アンテナ)の方位角情報と仰角情報とを取得し(本発明の姿勢情報取得ステップに対応)、取得した方位角情報と仰角情報とを姿勢情報として演算部3に出力する。ただし、上述したようにアンテナが水平状態であるため、姿勢センサ2は、アンテナがいずれの方角に傾いておらず、真っ直ぐ上空に向いていることを検知して姿勢情報として演算部3に出力する。
【0030】
なお、図3のフローチャートにおいては、ステップS1で衛星情報を取得した後にステップS2で姿勢センサ2の情報を取得しているが、GPSモジュール1と姿勢センサ2とは並列に動作しているため、いずれの情報取得が先でもよいし同時でもよい。
【0031】
次に、測位装置は、利用するGPS衛星の選択を行う(ステップS3)。具体的には、演算部3内の衛星選択部31は、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて、複数の測位衛星の中から測位演算に利用する測位衛星を選択する(本発明の選択ステップに対応)。
【0032】
選択するに際し、衛星選択部31は、姿勢センサ2により取得された方位角情報と仰角情報とに基づいてGPSモジュール1による捕捉可能範囲を決定し、GPSモジュール1により受信された衛星信号に基づいて導き出される測位衛星の方位角が当該捕捉範囲内に入る場合に、当該測位衛星を選択する。
【0033】
例えば、衛星選択部31は、アンテナが北に傾いていることを方位角情報として得た場合には、捕捉可能範囲は北を中心とした範囲となり、南側に位置する衛星は捕捉可能範囲外ということになる。また、衛星選択部31は、仰角情報に基づいて捕捉可能範囲を定めることにより適切な衛星選択を行うことができる。例えば、アンテナが北の方向に傾いている場合であってもその角度がわずかであれば、衛星選択部31は、ある程度南の方角についても捕捉可能範囲に入れることができる。一方、アンテナが北の方向に深く傾いている場合には、衛星選択部31は、南側の衛星については捕捉不可能とし、捕捉可能範囲が北を中心とする狭い範囲に限られることになる。
【0034】
今回は、GPSアンテナが水平であると仮定しているため、衛星選択部31は、アンテナがいずれの方角に傾いておらず、真っ直ぐ上空に向いていることを姿勢情報として取得しており、全方位について捕捉可能範囲とする。
【0035】
また、衛星選択部31は、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて複数の測位衛星の各々の仰角を算出し、予め設定された基準仰角以上の仰角を有する測位衛星を選択する。
【0036】
すなわち、衛星選択部31は、アンテナがいずれの方角に傾いておらず、真っ直ぐ上空に向いているとの姿勢情報に基づいて、GPSモジュール1が受信した衛星信号の発信源である測位衛星a〜gの各々の仰角(アンテナの位置する地表からみた各衛星の仰角)を算出し、低仰角である測位衛星c,eについては利用しないとの判断を行うため、基準仰角以上の仰角を有するその他の測位衛星a,b,d,f,gを選択する。
【0037】
最後に、測位衛星は測位演算を行う(ステップS4)。具体的には、位置算出部32は、衛星選択部31により選択された測位衛星a,b,d,f,gから送信された衛星信号に基づいて測位演算を行い、GPSモジュール1の位置を算出し(本発明の位置算出ステップに対応)、例えば緯度、経度、高さ等の数値を位置情報として出力する。
【0038】
その後、ステップS1に戻って演算を繰り返すことにより、測位装置は、常にGPSモジュール1の現在位置を算出することができ、測位装置を身体に装着した者が移動した場合においても即座に位置を把握することができる。
【0039】
図5は、本実施例の測位装置でアンテナが北に90度傾いている場合の衛星捕捉状態を示す図である。以下、図2(b)のようにGPSモジュール1と姿勢センサ2とを装着した者が北の方向に90度の角度でおじぎをし、それに伴ってアンテナが北に90度傾いた場合について図3,5を用いて説明する。
【0040】
図4を用いて説明した場合と同様に初期設定を行った後、測位装置は、衛星情報の取得を行う(ステップS1)。具体的には、GPSモジュール1は、複数の測位衛星a,b,c,fの各々による衛星信号を受信し、位置データとして演算部3に出力する。
【0041】
なお、アンテナが北に90度傾いているため、測位装置は、南側に位置する測位衛星d,e,gによる衛星信号については物理的に捕捉することができない。ただし、マルチパス等の影響により測位衛星d,e,gによる衛星信号をたまたま捕捉してしまう場合もあるので、その場合にはGPSモジュール1は、捕捉した全ての衛星信号について位置データとして出力する。
【0042】
また、測位装置は、姿勢センサ2の情報を取得する(ステップS2)。具体的には、姿勢センサ2は、GPSモジュール1(アンテナ)の方位角情報(北を向いている旨の情報)と仰角情報(90度傾いている旨の情報)とを取得し、取得した方位角情報と仰角情報とを姿勢情報として演算部3に出力する。
【0043】
次に、測位装置は、利用するGPS衛星の選択を行う(ステップS3)。具体的には、演算部3内の衛星選択部31は、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて、複数の測位衛星の中から測位演算に利用する測位衛星を選択する。
【0044】
選択するに際し、衛星選択部31は、姿勢センサ2により取得された方位角情報と仰角情報とに基づいてGPSモジュール1による捕捉可能範囲を決定し、GPSモジュール1により受信された衛星信号に基づいて導き出される測位衛星の方位角が当該捕捉範囲内に入る場合に、当該測位衛星を選択する。
【0045】
ここで、衛星選択部31は、アンテナが北に90度傾いているため、北側のみを捕捉可能範囲とし、南側の物理的に捕捉出来ない範囲については例え衛星信号を捕捉できたとしてもマルチパスの影響が大きいと考えられるため捕捉を行わない。
【0046】
したがって、衛星選択部31は、図5に示すように捕捉範囲内に入る測位衛星a,b,c,fのみを選択し、GPSモジュール1が衛星信号をとらえていたとしても測位衛星d,e,gについては選択しない。
【0047】
また、衛星選択部31は、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて複数の測位衛星の各々の仰角を算出し、予め設定された基準仰角以上の仰角を有する測位衛星を選択する。
【0048】
すなわち、衛星選択部31は、アンテナが北の方角に90度傾いているとの姿勢情報に基づいて、GPSモジュール1が受信した衛星信号の発信源である測位衛星a,b,c,fの各々の仰角(アンテナの位置する地表からみた各衛星の仰角)を算出し、低仰角である測位衛星cについては利用しないとの判断を行うため、基準仰角以上の仰角を有するその他の測位衛星a,b,fを選択する。
【0049】
図7で説明した従来の測位装置と異なり、本実施例の測位装置は、姿勢センサ2を備えているため、アンテナがどの方向にどの程度傾いていたとしても各測位衛星の重力方向に対する絶対的な仰角を算出することができ、アンテナが位置する地表に対して低仰角であるか否かを衛星毎に適切に判断することができる。
【0050】
最後に、測位衛星は測位演算を行う(ステップS4)。具体的には、位置算出部32は、衛星選択部31により選択された測位衛星a,b,fから送信された衛星信号に基づいて測位演算を行い、GPSモジュール1の位置を算出し、例えば緯度、経度、高さ等の数値を位置情報として出力する。
【0051】
その後、図4で説明した場合と同様に、ステップS1に戻って演算を繰り返すことにより、測位装置は、常にGPSモジュール1の現在位置を算出することができ、測位装置を身体に装着した者が移動した場合においても即座に位置を把握することができる。
【0052】
なお、災害救助等のような場面において複数の隊員が測位装置を使用し、隊長が各隊員の位置を把握する必要がある場合が考えられる。その場合には、各隊員は、GPSモジュール1、姿勢センサ2、及び演算部3が一体的に構成された測位装置を例えばヘルメット等に装着する。隊長は、無線のネットワーク等を介して各隊員が有する演算部3から送信されてくる情報をディスプレイ上に地図とともに表示し、各隊員の現在位置を容易に把握することができる。
【0053】
変形例として、演算部3に該当する構成を隊長が所持し、各隊員は、GPSモジュール1と姿勢センサ2のみを装着する構成も考えられる。この場合には、隊長が所持する演算部3は、各隊員が所持するGPSモジュール1と姿勢センサ2とから送られてくる位置データ及び姿勢情報に基づいて、各隊員の現在位置を算出し、ディスプレイ等に表示する。現在位置の表示の仕方として、隊長自身もGPSモジュール1と姿勢センサ2とを所持し、ディスプレイ上に常に隊長の位置を中心とする地図を表示するようにし、その地図上に各隊員の位置を光点で表示するような方法も考えられる。
【0054】
上述のとおり、本発明の実施例1の形態に係る測位装置及び測位方法によれば、測位衛星による衛星信号を受信するGPSモジュール1の設置姿勢が変化するような環境下においても適切に衛星を捕捉し、精度の高い測位を行うことができる。
【0055】
特に、衛星選択部31は、姿勢センサ2により取得された方位角情報と仰角情報とに基づいてGPSモジュール1による捕捉可能範囲を決定し、GPSモジュール1により受信された衛星信号に基づいて導き出される測位衛星の方位角が当該捕捉範囲内に入る場合に、当該測位衛星を選択するので、本来、物理的に捕捉できないはずの測位衛星から送られてきた衛星信号を捕捉した場合に、適切にその衛星信号による情報を除外し、マルチパス等の影響による測位精度の低下を防止することができる。
【0056】
また、衛星選択部31は、GPSモジュール1により受信された衛星信号と姿勢センサ2により取得された方位角情報と仰角情報とに基づいて複数の測位衛星の各々の仰角を算出し、予め設定された基準仰角以上の仰角を有する測位衛星を選択するので、GPSモジュール1が有するアンテナがどのような姿勢であったとしても、各測位衛星の重力方向に対する絶対的な仰角を正確に算出し、マルチパスの影響が大きいと思われる低仰角の衛星を確実にマスクして測位精度を高めることができる。
【0057】
いくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0058】
1 GPSモジュール
2 姿勢センサ
3 演算部
31 衛星選択部
32 位置算出部
a〜g 衛星
【特許請求の範囲】
【請求項1】
複数の測位衛星から送信される衛星信号を受信する受信機と、
前記受信機の方位角情報と仰角情報とを取得する姿勢センサと、
前記受信機により受信された衛星信号と前記姿勢センサにより取得された方位角情報と仰角情報とに基づいて、前記複数の測位衛星の中から測位演算に利用する測位衛星を選択する選択部と、
前記選択部により選択された測位衛星から送信された衛星信号に基づいて測位演算を行い、前記受信機の位置を算出する位置算出部と、
を備えることを特徴とする測位装置。
【請求項2】
前記選択部は、前記姿勢センサにより取得された方位角情報と仰角情報とに基づいて前記受信機による捕捉可能範囲を決定し、前記受信機により受信された衛星信号に基づいて導き出される測位衛星の方位角が当該捕捉可能範囲内に入る場合に、当該測位衛星を選択することを特徴とする請求項1記載の測位装置。
【請求項3】
前記選択部は、前記受信機により受信された衛星信号と前記姿勢センサにより取得された方位角情報と仰角情報とに基づいて前記複数の測位衛星の各々の仰角を算出し、予め設定された基準仰角以上の仰角を有する測位衛星を選択することを特徴とする請求項1又は請求項2記載の測位装置。
【請求項4】
複数の測位衛星から送信される衛星信号を受信機で受信する受信ステップと、
前記受信機の方位角情報と仰角情報とを姿勢センサで取得する姿勢情報取得ステップと、
前記受信機により受信された衛星信号と前記姿勢センサにより取得された方位角情報と仰角情報とに基づいて、前記複数の測位衛星の中から測位演算に利用する測位衛星を選択する選択ステップと、
前記選択ステップにより選択された測位衛星から送信された衛星信号に基づいて測位演算を行い、前記受信機の位置を算出する位置算出ステップと、
を備えることを特徴とする測位方法。
【請求項1】
複数の測位衛星から送信される衛星信号を受信する受信機と、
前記受信機の方位角情報と仰角情報とを取得する姿勢センサと、
前記受信機により受信された衛星信号と前記姿勢センサにより取得された方位角情報と仰角情報とに基づいて、前記複数の測位衛星の中から測位演算に利用する測位衛星を選択する選択部と、
前記選択部により選択された測位衛星から送信された衛星信号に基づいて測位演算を行い、前記受信機の位置を算出する位置算出部と、
を備えることを特徴とする測位装置。
【請求項2】
前記選択部は、前記姿勢センサにより取得された方位角情報と仰角情報とに基づいて前記受信機による捕捉可能範囲を決定し、前記受信機により受信された衛星信号に基づいて導き出される測位衛星の方位角が当該捕捉可能範囲内に入る場合に、当該測位衛星を選択することを特徴とする請求項1記載の測位装置。
【請求項3】
前記選択部は、前記受信機により受信された衛星信号と前記姿勢センサにより取得された方位角情報と仰角情報とに基づいて前記複数の測位衛星の各々の仰角を算出し、予め設定された基準仰角以上の仰角を有する測位衛星を選択することを特徴とする請求項1又は請求項2記載の測位装置。
【請求項4】
複数の測位衛星から送信される衛星信号を受信機で受信する受信ステップと、
前記受信機の方位角情報と仰角情報とを姿勢センサで取得する姿勢情報取得ステップと、
前記受信機により受信された衛星信号と前記姿勢センサにより取得された方位角情報と仰角情報とに基づいて、前記複数の測位衛星の中から測位演算に利用する測位衛星を選択する選択ステップと、
前記選択ステップにより選択された測位衛星から送信された衛星信号に基づいて測位演算を行い、前記受信機の位置を算出する位置算出ステップと、
を備えることを特徴とする測位方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−47474(P2012−47474A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−187162(P2010−187162)
【出願日】平成22年8月24日(2010.8.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月24日(2010.8.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]